Section 7.2 Euler s Method
|
|
|
- Sara Parks
- 5 years ago
- Views:
Transcription
1 Section 7.2 Euler s Method Key terms Scalar first order IVP (one step method) Euler s Method Derivation Error analysis Computational procedure Difference equation Slope field or Direction field Error
2 Euler's method is the simplest of the one-step methods for approximating the solution to the initial value problem. An outline of the general procedure follows. A scalar, first-order initial value problem is given as We want to determine a numerical approximation to y(t) at discrete points in the interval [a, b]. The true solution of the IVP is denoted y(t) and we adopt the notational convention that w i represents the approximation to y i = y(t i ). (Note that y i is a short hand notation for the value of the true solution at t i.) For simplicity, the approximate solution will be sought at equally spaced points; that is, for some positive integer N, we will define the step size h = (b a)/n and t i will be given by t i = a + ih, (I = 0, 1, 2,, N). For a number of techniques we develop the step size will be constant; i.e. equispaced points.
3 Derivation of Euler s Method The derivation is another application of Taylor series. Assume that the true solution y(t) of the IVP has two continuous derivatives. Expanding this true solution in a Taylor series about the point t = t i produces where ξ is guaranteed to lie between t and t i. Evaluating the above Taylor expansion at t = t i+1 and substituting for y i ꞌ from the right-hand side of the differential equation, we obtain the next estimate Euler's method arises by dropping the error term and replacing y i (exact solution) by w i (approximate solution):
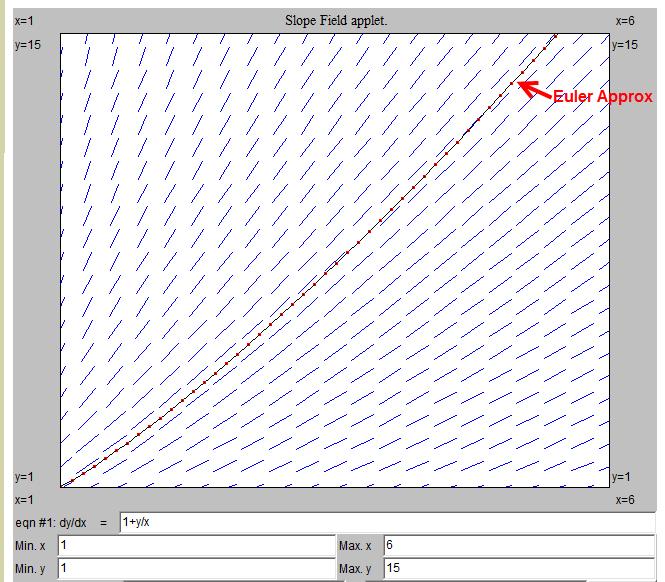
4 Example: Approximate IVP For this problem, f(t, x) is given by f(t, x) = 1 + x/t, so that the Euler's method difference equation takes the form Let's use a step size of h = 0.5, which will require ten steps to advance from t = 1 to t = 6. With t 0 = 1 and w 0 = 1, we calculate Advancing the value of the independent variable from t 0 to t 1 = t 0 + h = 1.5, we then calculate ETC. The exact solution is x(t) = t(1 + ln t). Thus we shall compare the Euler approximation and the exact solution.
5 Error Inspect the scales for the graphs. Approximate (solid) + True Soln (dotted) ABS. ERROR
6
7 Observe the slow but steady growth in the global error as t increases. Since each step introduces new error into the computed approximate solution, we might expect this type of behavior in every problem; however, the actual accumulation of global error is very problem dependent.
 If, nearby solutions separate from one another as t increases, we can expect to see a steady increase in the global error.")
8 Essentially, the error introduced by each step of the time marching process moves us from one solution of the differential equation onto a different solution. (At each step we encounter a new IVP; a perturbed IVP.) If, nearby solutions separate from one another as t increases, we can expect to see a steady increase in the global error. Note that a change of initial conditions had those solution curves move away from the solution curve for the original IVP. On the other hand, if nearby solutions move closer together as t increases, we could expect to observe a steady decline in the global error. The next example demonstrates this situation.
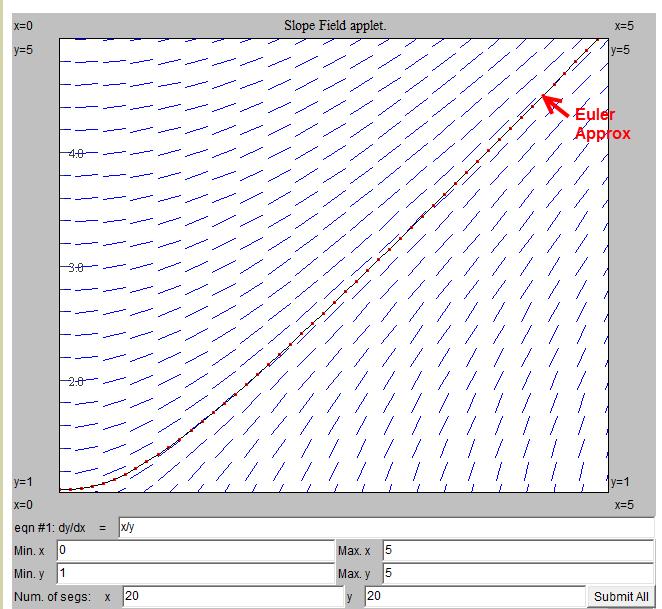
9 Another Example: IVP Here the Euler's method difference equation takes the form The exact solution is Here nearby solutions move closer together as t increases, so we observe a steady decline in the global error.

10 Approximate (solid) + True Soln (dotted) ABS. ERROR
11

12 In this case changes in the initial conditions have the nearby solutions move closer together as t increases. So we could expect to observe a steady decline in the global error.
?")
13 Next we need to determine the rate of convergence of Euler s method as the stepsize h decreases; h 0. Let's perform a numerical experiment. We expect that the accuracy of the approximate solution generated by Euler's method will improve if we decrease the step size h, but how much improvement will we obtain? Is the global error O(h)? Is it O(h 2 )? Is it O(h 3 )? The idea is that for each of our two examples we investigate the approximation at the end of solution interval for decreasing step sizes h. We halve the stepsize and look at how the error changes. Approx at t = 6. Note each time the step size is cut by a factor of 2, the absolute error shrinks by roughly the same factor. This suggests that the global error associated with Euler's method is O(h).

14 Approx at t = 5 Once again, each time the step size is cut by a factor of 2, the absolute error shrinks by roughly the same factor. So we conjecture that the rate of convergence of Euler s method is O(h).
15 Analysis of Euler s Method Euler s method is the simplest one-step method for approximating the solution of an IVP. Even so analyzing the error in Euler s method is not easy. We will outline the results. We start with the local truncation error which is

16 Basically this says, that if we choose h small enough we may get reasonable results. But we still need to see how the global error behaves. Here is where things get mathematically messy. We need the following condition: it is a vertical growth condition within a set D in the domain. Definition: A function f(t, y) satisfies a Lipschitz Condition in y on a set D in R 2 if there exists a constant L > 0 such that f(t, y 1) f(t, y 2 ) L y1 y2 For all ordered pairs (t, y 1 ) and (t, y 2 ) in set D. The constant L is called the Lipschitz Constant. A given function may satisfy a Lipschitz condition on one set, but not on another. Also, value of L may depend on the set D.
17 The next theorem deals with the accumulated error since w i depends on the previous approximations, w i-1, w i-2,, w 1. (We state this without a proof which requires some results involving sequences.) Note y i w i is the accumulated error in approximation w i at t = t i, assuming all the arithmetic was done exactly.
18
19 Global error at t = t i.
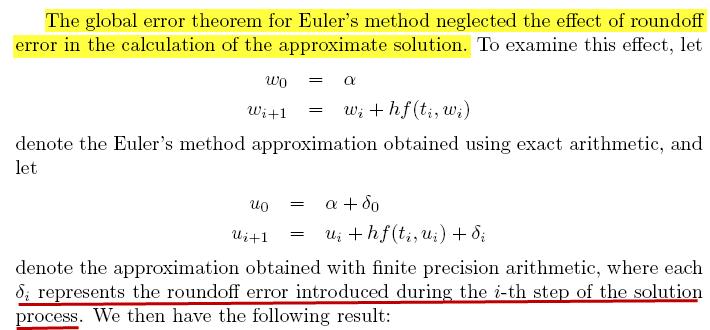
20 When the effect of roundoff is included the global error is composed of two competing forces. Finally if f(t,y) satisfies a Lipschitz condition in y, then it can be shown that Euler s method is stable with respect to perturbations of the initial conditions.
21 The truncation error in Euler's method can be reduced by using a smaller step size h; the reduction in error being linear with h. As the value of h is reduced, the number of steps to be used increases, thereby, increasing the round-off error. Thus, the round-off error increases as the truncation error decreases, as shown qualitatively in the figure. Although this figure shows that there is an optimum step size to minimize the total error, usually its value is not known. Hence, in practice, for a given differential equation, a series of solutions, each with a smaller step size, can be generated until two successive step sizes give essentially the same solution. At that stage, the solution can be assumed to have converged to the exact solution. However, it is to be noted that, due to the presence of round-off error, the numerical solution will always be different from the exact solution. In the absence of round-off errors, if a numerical solution approaches the exact solution as the step size (h) approaches zero, the numerical method is said to be convergent.
Numerical method for approximating the solution of an IVP. Euler Algorithm (the simplest approximation method)
") Section 2.7 Euler s Method (Computer Approximation) Key Terms/ Ideas: Numerical method for approximating the solution of an IVP Linear Approximation; Tangent Line Euler Algorithm (the simplest approximation
Section 2.7 Euler s Method (Computer Approximation) Key Terms/ Ideas: Numerical method for approximating the solution of an IVP Linear Approximation; Tangent Line Euler Algorithm (the simplest approximation
Numerical method for approximating the solution of an IVP. Euler Algorithm (the simplest approximation method)
") Section 2.7 Euler s Method (Computer Approximation) Key Terms/ Ideas: Numerical method for approximating the solution of an IVP Linear Approximation; Tangent Line Euler Algorithm (the simplest approximation
Section 2.7 Euler s Method (Computer Approximation) Key Terms/ Ideas: Numerical method for approximating the solution of an IVP Linear Approximation; Tangent Line Euler Algorithm (the simplest approximation
NUMERICAL SOLUTION OF ODE IVPs. Overview
 NUMERICAL SOLUTION OF ODE IVPs 1 Quick review of direction fields Overview 2 A reminder about and 3 Important test: Is the ODE initial value problem? 4 Fundamental concepts: Euler s Method 5 Fundamental
NUMERICAL SOLUTION OF ODE IVPs 1 Quick review of direction fields Overview 2 A reminder about and 3 Important test: Is the ODE initial value problem? 4 Fundamental concepts: Euler s Method 5 Fundamental
Second Order ODEs. CSCC51H- Numerical Approx, Int and ODEs p.130/177
 Second Order ODEs Often physical or biological systems are best described by second or higher-order ODEs. That is, second or higher order derivatives appear in the mathematical model of the system. For
Second Order ODEs Often physical or biological systems are best described by second or higher-order ODEs. That is, second or higher order derivatives appear in the mathematical model of the system. For
Section 7.4 Runge-Kutta Methods
 Section 7.4 Runge-Kutta Methods Key terms: Taylor methods Taylor series Runge-Kutta; methods linear combinations of function values at intermediate points Alternatives to second order Taylor methods Fourth
Section 7.4 Runge-Kutta Methods Key terms: Taylor methods Taylor series Runge-Kutta; methods linear combinations of function values at intermediate points Alternatives to second order Taylor methods Fourth
2tdt 1 y = t2 + C y = which implies C = 1 and the solution is y = 1
 Lectures - Week 11 General First Order ODEs & Numerical Methods for IVPs In general, nonlinear problems are much more difficult to solve than linear ones. Unfortunately many phenomena exhibit nonlinear
Lectures - Week 11 General First Order ODEs & Numerical Methods for IVPs In general, nonlinear problems are much more difficult to solve than linear ones. Unfortunately many phenomena exhibit nonlinear
Introduction to Initial Value Problems
 Chapter 2 Introduction to Initial Value Problems The purpose of this chapter is to study the simplest numerical methods for approximating the solution to a first order initial value problem (IVP). Because
Chapter 2 Introduction to Initial Value Problems The purpose of this chapter is to study the simplest numerical methods for approximating the solution to a first order initial value problem (IVP). Because
Numerical Methods. King Saud University
 Numerical Methods King Saud University Aims In this lecture, we will... find the approximate solutions of derivative (first- and second-order) and antiderivative (definite integral only). Numerical Differentiation
Numerical Methods King Saud University Aims In this lecture, we will... find the approximate solutions of derivative (first- and second-order) and antiderivative (definite integral only). Numerical Differentiation
Numerical Methods - Initial Value Problems for ODEs
 Numerical Methods - Initial Value Problems for ODEs Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Initial Value Problems for ODEs 2013 1 / 43 Outline 1 Initial Value
Numerical Methods - Initial Value Problems for ODEs Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Initial Value Problems for ODEs 2013 1 / 43 Outline 1 Initial Value
Euler s Method, Taylor Series Method, Runge Kutta Methods, Multi-Step Methods and Stability.
 Euler s Method, Taylor Series Method, Runge Kutta Methods, Multi-Step Methods and Stability. REVIEW: We start with the differential equation dy(t) dt = f (t, y(t)) (1.1) y(0) = y 0 This equation can be
Euler s Method, Taylor Series Method, Runge Kutta Methods, Multi-Step Methods and Stability. REVIEW: We start with the differential equation dy(t) dt = f (t, y(t)) (1.1) y(0) = y 0 This equation can be
Euler s Method, cont d
 Jim Lambers MAT 461/561 Spring Semester 009-10 Lecture 3 Notes These notes correspond to Sections 5. and 5.4 in the text. Euler s Method, cont d We conclude our discussion of Euler s method with an example
Jim Lambers MAT 461/561 Spring Semester 009-10 Lecture 3 Notes These notes correspond to Sections 5. and 5.4 in the text. Euler s Method, cont d We conclude our discussion of Euler s method with an example
Numerical Differential Equations: IVP
 Chapter 11 Numerical Differential Equations: IVP **** 4/16/13 EC (Incomplete) 11.1 Initial Value Problem for Ordinary Differential Equations We consider the problem of numerically solving a differential
Chapter 11 Numerical Differential Equations: IVP **** 4/16/13 EC (Incomplete) 11.1 Initial Value Problem for Ordinary Differential Equations We consider the problem of numerically solving a differential
Higher Order Taylor Methods
 Higher Order Taylor Methods Marcelo Julio Alvisio & Lisa Marie Danz May 6, 2007 Introduction Differential equations are one of the building blocks in science or engineering. Scientists aim to obtain numerical
Higher Order Taylor Methods Marcelo Julio Alvisio & Lisa Marie Danz May 6, 2007 Introduction Differential equations are one of the building blocks in science or engineering. Scientists aim to obtain numerical
Floating Point Number Systems. Simon Fraser University Surrey Campus MACM 316 Spring 2005 Instructor: Ha Le
 Floating Point Number Systems Simon Fraser University Surrey Campus MACM 316 Spring 2005 Instructor: Ha Le 1 Overview Real number system Examples Absolute and relative errors Floating point numbers Roundoff
Floating Point Number Systems Simon Fraser University Surrey Campus MACM 316 Spring 2005 Instructor: Ha Le 1 Overview Real number system Examples Absolute and relative errors Floating point numbers Roundoff
TS Method Summary. T k (x,y j 1 ) f(x j 1,y j 1 )+ 2 f (x j 1,y j 1 ) + k 1
 f(x j 1,y j 1 )+ 2 f (x j 1,y j 1 ) + k 1") TS Method Summary Let T k (x,y j 1 ) denote the first k +1 terms of the Taylor series expanded about the discrete approximation, (x j 1,y j 1 ), and ẑ k,j (x) be the polynomial approximation (to y(x))
TS Method Summary Let T k (x,y j 1 ) denote the first k +1 terms of the Taylor series expanded about the discrete approximation, (x j 1,y j 1 ), and ẑ k,j (x) be the polynomial approximation (to y(x))
Numerical Analysis Exam with Solutions
 Numerical Analysis Exam with Solutions Richard T. Bumby Fall 000 June 13, 001 You are expected to have books, notes and calculators available, but computers of telephones are not to be used during the
Numerical Analysis Exam with Solutions Richard T. Bumby Fall 000 June 13, 001 You are expected to have books, notes and calculators available, but computers of telephones are not to be used during the
Numerical methods for solving ODEs
 Chapter 2 Numerical methods for solving ODEs We will study two methods for finding approximate solutions of ODEs. Such methods may be used for (at least) two reasons the ODE does not have an exact solution
Chapter 2 Numerical methods for solving ODEs We will study two methods for finding approximate solutions of ODEs. Such methods may be used for (at least) two reasons the ODE does not have an exact solution
Section 1.3 Integration
 Section 1.3 Integration Key terms: Integral Constant of integration Fundamental theorem of calculus First order DE One parameter family of solutions General solution Initial value problem Particular solution
Section 1.3 Integration Key terms: Integral Constant of integration Fundamental theorem of calculus First order DE One parameter family of solutions General solution Initial value problem Particular solution
Lecture Notes on Numerical Differential Equations: IVP
 Lecture Notes on Numerical Differential Equations: IVP Professor Biswa Nath Datta Department of Mathematical Sciences Northern Illinois University DeKalb, IL. 60115 USA E mail: dattab@math.niu.edu URL:
Lecture Notes on Numerical Differential Equations: IVP Professor Biswa Nath Datta Department of Mathematical Sciences Northern Illinois University DeKalb, IL. 60115 USA E mail: dattab@math.niu.edu URL:
Time Integration Methods for the Heat Equation
 Time Integration Methods for the Heat Equation Tobias Köppl - JASS March 2008 Heat Equation: t u u = 0 Preface This paper is a short summary of my talk about the topic: Time Integration Methods for the
Time Integration Methods for the Heat Equation Tobias Köppl - JASS March 2008 Heat Equation: t u u = 0 Preface This paper is a short summary of my talk about the topic: Time Integration Methods for the
dt 2 The Order of a differential equation is the order of the highest derivative that occurs in the equation. Example The differential equation
 Lecture 18 : Direction Fields and Euler s Method A Differential Equation is an equation relating an unknown function and one or more of its derivatives. Examples Population growth : dp dp = kp, or = kp
Lecture 18 : Direction Fields and Euler s Method A Differential Equation is an equation relating an unknown function and one or more of its derivatives. Examples Population growth : dp dp = kp, or = kp
Taylor polynomials. 1. Introduction. 2. Linear approximation.
 ucsc supplementary notes ams/econ 11a Taylor polynomials c 01 Yonatan Katznelson 1. Introduction The most elementary functions are polynomials because they involve only the most basic arithmetic operations
ucsc supplementary notes ams/econ 11a Taylor polynomials c 01 Yonatan Katznelson 1. Introduction The most elementary functions are polynomials because they involve only the most basic arithmetic operations
Physics 584 Computational Methods
 Physics 584 Computational Methods Introduction to Matlab and Numerical Solutions to Ordinary Differential Equations Ryan Ogliore April 18 th, 2016 Lecture Outline Introduction to Matlab Numerical Solutions
Physics 584 Computational Methods Introduction to Matlab and Numerical Solutions to Ordinary Differential Equations Ryan Ogliore April 18 th, 2016 Lecture Outline Introduction to Matlab Numerical Solutions
Math 252 Fall 2002 Supplement on Euler s Method
 Math 5 Fall 00 Supplement on Euler s Method Introduction. The textbook seems overly enthusiastic about Euler s method. These notes aim to present a more realistic treatment of the value of the method and
Math 5 Fall 00 Supplement on Euler s Method Introduction. The textbook seems overly enthusiastic about Euler s method. These notes aim to present a more realistic treatment of the value of the method and
Initial value problems for ordinary differential equations
 AMSC/CMSC 660 Scientific Computing I Fall 2008 UNIT 5: Numerical Solution of Ordinary Differential Equations Part 1 Dianne P. O Leary c 2008 The Plan Initial value problems (ivps) for ordinary differential
AMSC/CMSC 660 Scientific Computing I Fall 2008 UNIT 5: Numerical Solution of Ordinary Differential Equations Part 1 Dianne P. O Leary c 2008 The Plan Initial value problems (ivps) for ordinary differential
1 Error Analysis for Solving IVP
 cs412: introduction to numerical analysis 12/9/10 Lecture 25: Numerical Solution of Differential Equations Error Analysis Instructor: Professor Amos Ron Scribes: Yunpeng Li, Mark Cowlishaw, Nathanael Fillmore
cs412: introduction to numerical analysis 12/9/10 Lecture 25: Numerical Solution of Differential Equations Error Analysis Instructor: Professor Amos Ron Scribes: Yunpeng Li, Mark Cowlishaw, Nathanael Fillmore
Introduction - Motivation. Many phenomena (physical, chemical, biological, etc.) are model by differential equations. f f(x + h) f(x) (x) = lim
 are model by differential equations. f f(x + h) f(x) (x) = lim") Introduction - Motivation Many phenomena (physical, chemical, biological, etc.) are model by differential equations. Recall the definition of the derivative of f(x) f f(x + h) f(x) (x) = lim. h 0 h Its
Introduction - Motivation Many phenomena (physical, chemical, biological, etc.) are model by differential equations. Recall the definition of the derivative of f(x) f f(x + h) f(x) (x) = lim. h 0 h Its
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 9 Initial Value Problems for Ordinary Differential Equations Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign
Scientific Computing: An Introductory Survey Chapter 9 Initial Value Problems for Ordinary Differential Equations Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign
2.1 Differential Equations and Solutions. Blerina Xhabli
 2.1 Math 3331 Differential Equations 2.1 Differential Equations and Solutions Blerina Xhabli Department of Mathematics, University of Houston blerina@math.uh.edu math.uh.edu/ blerina/teaching.html Blerina
2.1 Math 3331 Differential Equations 2.1 Differential Equations and Solutions Blerina Xhabli Department of Mathematics, University of Houston blerina@math.uh.edu math.uh.edu/ blerina/teaching.html Blerina
Scientific Computing with Case Studies SIAM Press, Lecture Notes for Unit V Solution of
 Scientific Computing with Case Studies SIAM Press, 2009 http://www.cs.umd.edu/users/oleary/sccswebpage Lecture Notes for Unit V Solution of Differential Equations Part 1 Dianne P. O Leary c 2008 1 The
Scientific Computing with Case Studies SIAM Press, 2009 http://www.cs.umd.edu/users/oleary/sccswebpage Lecture Notes for Unit V Solution of Differential Equations Part 1 Dianne P. O Leary c 2008 1 The
Math 128A Spring 2003 Week 12 Solutions
 Math 128A Spring 2003 Week 12 Solutions Burden & Faires 5.9: 1b, 2b, 3, 5, 6, 7 Burden & Faires 5.10: 4, 5, 8 Burden & Faires 5.11: 1c, 2, 5, 6, 8 Burden & Faires 5.9. Higher-Order Equations and Systems
Math 128A Spring 2003 Week 12 Solutions Burden & Faires 5.9: 1b, 2b, 3, 5, 6, 7 Burden & Faires 5.10: 4, 5, 8 Burden & Faires 5.11: 1c, 2, 5, 6, 8 Burden & Faires 5.9. Higher-Order Equations and Systems
Numerical Solution of ODE IVPs
 L.G. de Pillis and A.E. Radunskaya July 30, 2002 This work was supported in part by a grant from the W.M. Keck Foundation 0-0 NUMERICAL SOLUTION OF ODE IVPs Overview 1. Quick review of direction fields.
L.G. de Pillis and A.E. Radunskaya July 30, 2002 This work was supported in part by a grant from the W.M. Keck Foundation 0-0 NUMERICAL SOLUTION OF ODE IVPs Overview 1. Quick review of direction fields.
AN OVERVIEW. Numerical Methods for ODE Initial Value Problems. 1. One-step methods (Taylor series, Runge-Kutta)
") AN OVERVIEW Numerical Methods for ODE Initial Value Problems 1. One-step methods (Taylor series, Runge-Kutta) 2. Multistep methods (Predictor-Corrector, Adams methods) Both of these types of methods are
AN OVERVIEW Numerical Methods for ODE Initial Value Problems 1. One-step methods (Taylor series, Runge-Kutta) 2. Multistep methods (Predictor-Corrector, Adams methods) Both of these types of methods are
Consistency and Convergence
 Jim Lambers MAT 77 Fall Semester 010-11 Lecture 0 Notes These notes correspond to Sections 1.3, 1.4 and 1.5 in the text. Consistency and Convergence We have learned that the numerical solution obtained
Jim Lambers MAT 77 Fall Semester 010-11 Lecture 0 Notes These notes correspond to Sections 1.3, 1.4 and 1.5 in the text. Consistency and Convergence We have learned that the numerical solution obtained
Lecture Notes to Accompany. Scientific Computing An Introductory Survey. by Michael T. Heath. Chapter 9
 Lecture Notes to Accompany Scientific Computing An Introductory Survey Second Edition by Michael T. Heath Chapter 9 Initial Value Problems for Ordinary Differential Equations Copyright c 2001. Reproduction
Lecture Notes to Accompany Scientific Computing An Introductory Survey Second Edition by Michael T. Heath Chapter 9 Initial Value Problems for Ordinary Differential Equations Copyright c 2001. Reproduction
Chapter 6 - Ordinary Differential Equations
 Chapter 6 - Ordinary Differential Equations 7.1 Solving Initial-Value Problems In this chapter, we will be interested in the solution of ordinary differential equations. Ordinary differential equations
Chapter 6 - Ordinary Differential Equations 7.1 Solving Initial-Value Problems In this chapter, we will be interested in the solution of ordinary differential equations. Ordinary differential equations
Ordinary Differential Equations (ODEs)
") Ordinary Differential Equations (ODEs) NRiC Chapter 16. ODEs involve derivatives wrt one independent variable, e.g. time t. ODEs can always be reduced to a set of firstorder equations (involving only first
Ordinary Differential Equations (ODEs) NRiC Chapter 16. ODEs involve derivatives wrt one independent variable, e.g. time t. ODEs can always be reduced to a set of firstorder equations (involving only first
Ph 22.1 Return of the ODEs: higher-order methods
 Ph 22.1 Return of the ODEs: higher-order methods -v20130111- Introduction This week we are going to build on the experience that you gathered in the Ph20, and program more advanced (and accurate!) solvers
Ph 22.1 Return of the ODEs: higher-order methods -v20130111- Introduction This week we are going to build on the experience that you gathered in the Ph20, and program more advanced (and accurate!) solvers
Introduction to the Numerical Solution of IVP for ODE
 Introduction to the Numerical Solution of IVP for ODE 45 Introduction to the Numerical Solution of IVP for ODE Consider the IVP: DE x = f(t, x), IC x(a) = x a. For simplicity, we will assume here that
Introduction to the Numerical Solution of IVP for ODE 45 Introduction to the Numerical Solution of IVP for ODE Consider the IVP: DE x = f(t, x), IC x(a) = x a. For simplicity, we will assume here that
Initial value problems for ordinary differential equations
 Initial value problems for ordinary differential equations Xiaojing Ye, Math & Stat, Georgia State University Spring 2019 Numerical Analysis II Xiaojing Ye, Math & Stat, Georgia State University 1 IVP
Initial value problems for ordinary differential equations Xiaojing Ye, Math & Stat, Georgia State University Spring 2019 Numerical Analysis II Xiaojing Ye, Math & Stat, Georgia State University 1 IVP
CS 450 Numerical Analysis. Chapter 9: Initial Value Problems for Ordinary Differential Equations
 Lecture slides based on the textbook Scientific Computing: An Introductory Survey by Michael T. Heath, copyright c 2018 by the Society for Industrial and Applied Mathematics. http://www.siam.org/books/cl80
Lecture slides based on the textbook Scientific Computing: An Introductory Survey by Michael T. Heath, copyright c 2018 by the Society for Industrial and Applied Mathematics. http://www.siam.org/books/cl80
A Brief Introduction to Numerical Methods for Differential Equations
 A Brief Introduction to Numerical Methods for Differential Equations January 10, 2011 This tutorial introduces some basic numerical computation techniques that are useful for the simulation and analysis
A Brief Introduction to Numerical Methods for Differential Equations January 10, 2011 This tutorial introduces some basic numerical computation techniques that are useful for the simulation and analysis
Chap. 20: Initial-Value Problems
 Chap. 20: Initial-Value Problems Ordinary Differential Equations Goal: to solve differential equations of the form: dy dt f t, y The methods in this chapter are all one-step methods and have the general
Chap. 20: Initial-Value Problems Ordinary Differential Equations Goal: to solve differential equations of the form: dy dt f t, y The methods in this chapter are all one-step methods and have the general
Numerical Methods for Initial Value Problems; Harmonic Oscillators
 Lab 1 Numerical Methods for Initial Value Problems; Harmonic Oscillators Lab Objective: Implement several basic numerical methods for initial value problems (IVPs), and use them to study harmonic oscillators.
Lab 1 Numerical Methods for Initial Value Problems; Harmonic Oscillators Lab Objective: Implement several basic numerical methods for initial value problems (IVPs), and use them to study harmonic oscillators.
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 6 Chapter 20 Initial-Value Problems PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 6 Chapter 20 Initial-Value Problems PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
8.1 Introduction. Consider the initial value problem (IVP):
:") 8.1 Introduction Consider the initial value problem (IVP): y dy dt = f(t, y), y(t 0)=y 0, t 0 t T. Geometrically: solutions are a one parameter family of curves y = y(t) in(t, y)-plane. Assume solution
8.1 Introduction Consider the initial value problem (IVP): y dy dt = f(t, y), y(t 0)=y 0, t 0 t T. Geometrically: solutions are a one parameter family of curves y = y(t) in(t, y)-plane. Assume solution
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 6 Chapter 20 Initial-Value Problems PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 6 Chapter 20 Initial-Value Problems PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Computational Physics (6810): Session 8
: Session 8") Computational Physics (6810): Session 8 Dick Furnstahl Nuclear Theory Group OSU Physics Department February 24, 2014 Differential equation solving Session 7 Preview Session 8 Stuff Solving differential
Computational Physics (6810): Session 8 Dick Furnstahl Nuclear Theory Group OSU Physics Department February 24, 2014 Differential equation solving Session 7 Preview Session 8 Stuff Solving differential
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 5 Chapter 21 Numerical Differentiation PowerPoints organized by Dr. Michael R. Gustafson II, Duke University 1 All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 5 Chapter 21 Numerical Differentiation PowerPoints organized by Dr. Michael R. Gustafson II, Duke University 1 All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Lecture 4: Numerical solution of ordinary differential equations
 Lecture 4: Numerical solution of ordinary differential equations Department of Mathematics, ETH Zürich General explicit one-step method: Consistency; Stability; Convergence. High-order methods: Taylor
Lecture 4: Numerical solution of ordinary differential equations Department of Mathematics, ETH Zürich General explicit one-step method: Consistency; Stability; Convergence. High-order methods: Taylor
Numerical Methods for Initial Value Problems; Harmonic Oscillators
 1 Numerical Methods for Initial Value Problems; Harmonic Oscillators Lab Objective: Implement several basic numerical methods for initial value problems (IVPs), and use them to study harmonic oscillators.
1 Numerical Methods for Initial Value Problems; Harmonic Oscillators Lab Objective: Implement several basic numerical methods for initial value problems (IVPs), and use them to study harmonic oscillators.
4 Stability analysis of finite-difference methods for ODEs
 MATH 337, by T. Lakoba, University of Vermont 36 4 Stability analysis of finite-difference methods for ODEs 4.1 Consistency, stability, and convergence of a numerical method; Main Theorem In this Lecture
MATH 337, by T. Lakoba, University of Vermont 36 4 Stability analysis of finite-difference methods for ODEs 4.1 Consistency, stability, and convergence of a numerical method; Main Theorem In this Lecture
0.1 Solution by Inspection
 1 Modeling with Differential Equations: Introduction to the Issues c 2002 Donald Kreider and Dwight Lahr A differential equation is an equation involving derivatives and functions. In the last section,
1 Modeling with Differential Equations: Introduction to the Issues c 2002 Donald Kreider and Dwight Lahr A differential equation is an equation involving derivatives and functions. In the last section,
Qualitative analysis of differential equations: Part I
 Qualitative analysis of differential equations: Part I Math 12 Section 16 November 7, 216 Hi, I m Kelly. Cole is away. Office hours are cancelled. Cole is available by email: zmurchok@math.ubc.ca. Today...
Qualitative analysis of differential equations: Part I Math 12 Section 16 November 7, 216 Hi, I m Kelly. Cole is away. Office hours are cancelled. Cole is available by email: zmurchok@math.ubc.ca. Today...
You may not use your books, notes; calculators are highly recommended.
 Math 301 Winter 2013-14 Midterm 1 02/06/2014 Time Limit: 60 Minutes Name (Print): Instructor This exam contains 8 pages (including this cover page) and 6 problems. Check to see if any pages are missing.
Math 301 Winter 2013-14 Midterm 1 02/06/2014 Time Limit: 60 Minutes Name (Print): Instructor This exam contains 8 pages (including this cover page) and 6 problems. Check to see if any pages are missing.
Checking the Radioactive Decay Euler Algorithm
 Lecture 2: Checking Numerical Results Review of the first example: radioactive decay The radioactive decay equation dn/dt = N τ has a well known solution in terms of the initial number of nuclei present
Lecture 2: Checking Numerical Results Review of the first example: radioactive decay The radioactive decay equation dn/dt = N τ has a well known solution in terms of the initial number of nuclei present
Chapter 4. A simple method for solving first order equations numerically
 Chapter 4. A simple method for solving first order equations numerically We shall discuss a simple numerical method suggested in the introduction, where it was applied to the second order equation associated
Chapter 4. A simple method for solving first order equations numerically We shall discuss a simple numerical method suggested in the introduction, where it was applied to the second order equation associated
Section 6.3 Richardson s Extrapolation. Extrapolation (To infer or estimate by extending or projecting known information.)
") Section 6.3 Richardson s Extrapolation Key Terms: Extrapolation (To infer or estimate by extending or projecting known information.) Illustrated using Finite Differences The difference between Interpolation
Section 6.3 Richardson s Extrapolation Key Terms: Extrapolation (To infer or estimate by extending or projecting known information.) Illustrated using Finite Differences The difference between Interpolation
Woods Hole Methods of Computational Neuroscience. Differential Equations and Linear Algebra. Lecture Notes
 Woods Hole Methods of Computational Neuroscience Differential Equations and Linear Algebra Lecture Notes c 004, 005 William L. Kath MCN 005 ODE & Linear Algebra Notes 1. Classification of differential
Woods Hole Methods of Computational Neuroscience Differential Equations and Linear Algebra Lecture Notes c 004, 005 William L. Kath MCN 005 ODE & Linear Algebra Notes 1. Classification of differential
Example 1 Which of these functions are polynomials in x? In the case(s) where f is a polynomial,
 where f is a polynomial,") 1. Polynomials A polynomial in x is a function of the form p(x) = a 0 + a 1 x + a 2 x 2 +... a n x n (a n 0, n a non-negative integer) where a 0, a 1, a 2,..., a n are constants. We say that this polynomial
1. Polynomials A polynomial in x is a function of the form p(x) = a 0 + a 1 x + a 2 x 2 +... a n x n (a n 0, n a non-negative integer) where a 0, a 1, a 2,..., a n are constants. We say that this polynomial
Ordinary Differential Equations
 CHAPTER 8 Ordinary Differential Equations 8.1. Introduction My section 8.1 will cover the material in sections 8.1 and 8.2 in the book. Read the book sections on your own. I don t like the order of things
CHAPTER 8 Ordinary Differential Equations 8.1. Introduction My section 8.1 will cover the material in sections 8.1 and 8.2 in the book. Read the book sections on your own. I don t like the order of things
Applied Math for Engineers
 Applied Math for Engineers Ming Zhong Lecture 15 March 28, 2018 Ming Zhong (JHU) AMS Spring 2018 1 / 28 Recap Table of Contents 1 Recap 2 Numerical ODEs: Single Step Methods 3 Multistep Methods 4 Method
Applied Math for Engineers Ming Zhong Lecture 15 March 28, 2018 Ming Zhong (JHU) AMS Spring 2018 1 / 28 Recap Table of Contents 1 Recap 2 Numerical ODEs: Single Step Methods 3 Multistep Methods 4 Method
Ordinary differential equation II
 Ordinary Differential Equations ISC-5315 1 Ordinary differential equation II 1 Some Basic Methods 1.1 Backward Euler method (implicit method) The algorithm looks like this: y n = y n 1 + hf n (1) In contrast
Ordinary Differential Equations ISC-5315 1 Ordinary differential equation II 1 Some Basic Methods 1.1 Backward Euler method (implicit method) The algorithm looks like this: y n = y n 1 + hf n (1) In contrast
MATH 312 Section 1.2: Initial Value Problems
 MATH 312 Section 1.2: Initial Value Problems Prof. Jonathan Duncan Walla Walla College Spring Quarter, 2007 Outline 1 Introduction to Initial Value Problems 2 Existence and Uniqueness 3 Conclusion Families
MATH 312 Section 1.2: Initial Value Problems Prof. Jonathan Duncan Walla Walla College Spring Quarter, 2007 Outline 1 Introduction to Initial Value Problems 2 Existence and Uniqueness 3 Conclusion Families
Ordinary Differential Equations
 Chapter 7 Ordinary Differential Equations Differential equations are an extremely important tool in various science and engineering disciplines. Laws of nature are most often expressed as different equations.
Chapter 7 Ordinary Differential Equations Differential equations are an extremely important tool in various science and engineering disciplines. Laws of nature are most often expressed as different equations.
Introductory Numerical Analysis
 Introductory Numerical Analysis Lecture Notes December 16, 017 Contents 1 Introduction to 1 11 Floating Point Numbers 1 1 Computational Errors 13 Algorithm 3 14 Calculus Review 3 Root Finding 5 1 Bisection
Introductory Numerical Analysis Lecture Notes December 16, 017 Contents 1 Introduction to 1 11 Floating Point Numbers 1 1 Computational Errors 13 Algorithm 3 14 Calculus Review 3 Root Finding 5 1 Bisection
CONVERGENCE AND STABILITY CONSTANT OF THE THETA-METHOD
 Conference Applications of Mathematics 2013 in honor of the 70th birthday of Karel Segeth. Jan Brandts, Sergey Korotov, Michal Křížek, Jakub Šístek, and Tomáš Vejchodský (Eds.), Institute of Mathematics
Conference Applications of Mathematics 2013 in honor of the 70th birthday of Karel Segeth. Jan Brandts, Sergey Korotov, Michal Křížek, Jakub Šístek, and Tomáš Vejchodský (Eds.), Institute of Mathematics
NUMERICAL ANALYSIS 2 - FINAL EXAM Summer Term 2006 Matrikelnummer:
 Prof. Dr. O. Junge, T. März Scientific Computing - M3 Center for Mathematical Sciences Munich University of Technology Name: NUMERICAL ANALYSIS 2 - FINAL EXAM Summer Term 2006 Matrikelnummer: I agree to
Prof. Dr. O. Junge, T. März Scientific Computing - M3 Center for Mathematical Sciences Munich University of Technology Name: NUMERICAL ANALYSIS 2 - FINAL EXAM Summer Term 2006 Matrikelnummer: I agree to
Physically Based Modeling: Principles and Practice Differential Equation Basics
 Physically Based Modeling: Principles and Practice Differential Equation Basics Andrew Witkin and David Baraff Robotics Institute Carnegie Mellon University Please note: This document is 1997 by Andrew
Physically Based Modeling: Principles and Practice Differential Equation Basics Andrew Witkin and David Baraff Robotics Institute Carnegie Mellon University Please note: This document is 1997 by Andrew
Physically Based Modeling Differential Equation Basics
 Physically Based Modeling Differential Equation Basics Andrew Witkin and David Baraff Pixar Animation Studios Please note: This document is 2001 by Andrew Witkin and David Baraff. This chapter may be freely
Physically Based Modeling Differential Equation Basics Andrew Witkin and David Baraff Pixar Animation Studios Please note: This document is 2001 by Andrew Witkin and David Baraff. This chapter may be freely
1 Systems of First Order IVP
 cs412: introduction to numerical analysis 12/09/10 Lecture 24: Systems of First Order Differential Equations Instructor: Professor Amos Ron Scribes: Yunpeng Li, Mark Cowlishaw, Nathanael Fillmore 1 Systems
cs412: introduction to numerical analysis 12/09/10 Lecture 24: Systems of First Order Differential Equations Instructor: Professor Amos Ron Scribes: Yunpeng Li, Mark Cowlishaw, Nathanael Fillmore 1 Systems
APPLICATIONS OF FD APPROXIMATIONS FOR SOLVING ORDINARY DIFFERENTIAL EQUATIONS
 LECTURE 10 APPLICATIONS OF FD APPROXIMATIONS FOR SOLVING ORDINARY DIFFERENTIAL EQUATIONS Ordinary Differential Equations Initial Value Problems For Initial Value problems (IVP s), conditions are specified
LECTURE 10 APPLICATIONS OF FD APPROXIMATIONS FOR SOLVING ORDINARY DIFFERENTIAL EQUATIONS Ordinary Differential Equations Initial Value Problems For Initial Value problems (IVP s), conditions are specified
Numerical Methods for Ordinary Differential Equations
 CHAPTER 1 Numerical Methods for Ordinary Differential Equations In this chapter we discuss numerical method for ODE. We will discuss the two basic methods, Euler s Method and Runge-Kutta Method. 1. Numerical
CHAPTER 1 Numerical Methods for Ordinary Differential Equations In this chapter we discuss numerical method for ODE. We will discuss the two basic methods, Euler s Method and Runge-Kutta Method. 1. Numerical
9.2 Euler s Method. (1) t k = a + kh for k = 0, 1,..., M where h = b a. The value h is called the step size. We now proceed to solve approximately
 t k = a + kh for k = 0, 1,..., M where h = b a. The value h is called the step size. We now proceed to solve approximately") 464 CHAP. 9 SOLUTION OF DIFFERENTIAL EQUATIONS 9. Euler s Method The reader should be convinced that not all initial value problems can be solved explicitly, and often it is impossible to find a formula
464 CHAP. 9 SOLUTION OF DIFFERENTIAL EQUATIONS 9. Euler s Method The reader should be convinced that not all initial value problems can be solved explicitly, and often it is impossible to find a formula
5. Hand in the entire exam booklet and your computer score sheet.
 WINTER 2016 MATH*2130 Final Exam Last name: (PRINT) First name: Student #: Instructor: M. R. Garvie 19 April, 2016 INSTRUCTIONS: 1. This is a closed book examination, but a calculator is allowed. The test
WINTER 2016 MATH*2130 Final Exam Last name: (PRINT) First name: Student #: Instructor: M. R. Garvie 19 April, 2016 INSTRUCTIONS: 1. This is a closed book examination, but a calculator is allowed. The test
AN INTERVAL METHOD FOR INITIAL VALUE PROBLEMS IN LINEAR ORDINARY DIFFERENTIAL EQUATIONS
 AN INTERVAL METHOD FOR INITIAL VALUE PROBLEMS IN LINEAR ORDINARY DIFFERENTIAL EQUATIONS NEDIALKO S. NEDIALKOV Abstract. Interval numerical methods for initial value problems (IVPs) for ordinary differential
AN INTERVAL METHOD FOR INITIAL VALUE PROBLEMS IN LINEAR ORDINARY DIFFERENTIAL EQUATIONS NEDIALKO S. NEDIALKOV Abstract. Interval numerical methods for initial value problems (IVPs) for ordinary differential
Notation Nodes are data points at which functional values are available or at which you wish to compute functional values At the nodes fx i
 LECTURE 6 NUMERICAL DIFFERENTIATION To find discrete approximations to differentiation (since computers can only deal with functional values at discrete points) Uses of numerical differentiation To represent
LECTURE 6 NUMERICAL DIFFERENTIATION To find discrete approximations to differentiation (since computers can only deal with functional values at discrete points) Uses of numerical differentiation To represent
Mathematics for chemical engineers. Numerical solution of ordinary differential equations
 Mathematics for chemical engineers Drahoslava Janovská Numerical solution of ordinary differential equations Initial value problem Winter Semester 2015-2016 Outline 1 Introduction 2 One step methods Euler
Mathematics for chemical engineers Drahoslava Janovská Numerical solution of ordinary differential equations Initial value problem Winter Semester 2015-2016 Outline 1 Introduction 2 One step methods Euler
Euler s Method applied to the control of switched systems
 Euler s Method applied to the control of switched systems FORMATS 2017 - Berlin Laurent Fribourg 1 September 6, 2017 1 LSV - CNRS & ENS Cachan L. Fribourg Euler s method and switched systems September
Euler s Method applied to the control of switched systems FORMATS 2017 - Berlin Laurent Fribourg 1 September 6, 2017 1 LSV - CNRS & ENS Cachan L. Fribourg Euler s method and switched systems September
Chapter 11 ORDINARY DIFFERENTIAL EQUATIONS
 Chapter 11 ORDINARY DIFFERENTIAL EQUATIONS The general form of a first order differential equations is = f(x, y) with initial condition y(a) = y a We seek the solution y = y(x) for x > a This is shown
Chapter 11 ORDINARY DIFFERENTIAL EQUATIONS The general form of a first order differential equations is = f(x, y) with initial condition y(a) = y a We seek the solution y = y(x) for x > a This is shown
Do not turn over until you are told to do so by the Invigilator.
 UNIVERSITY OF EAST ANGLIA School of Mathematics Main Series UG Examination 216 17 INTRODUCTION TO NUMERICAL ANALYSIS MTHE612B Time allowed: 3 Hours Attempt QUESTIONS 1 and 2, and THREE other questions.
UNIVERSITY OF EAST ANGLIA School of Mathematics Main Series UG Examination 216 17 INTRODUCTION TO NUMERICAL ANALYSIS MTHE612B Time allowed: 3 Hours Attempt QUESTIONS 1 and 2, and THREE other questions.
Numerical Methods of Approximation
 Contents 31 Numerical Methods of Approximation 31.1 Polynomial Approximations 2 31.2 Numerical Integration 28 31.3 Numerical Differentiation 58 31.4 Nonlinear Equations 67 Learning outcomes In this Workbook
Contents 31 Numerical Methods of Approximation 31.1 Polynomial Approximations 2 31.2 Numerical Integration 28 31.3 Numerical Differentiation 58 31.4 Nonlinear Equations 67 Learning outcomes In this Workbook
INTRODUCTION TO COMPUTER METHODS FOR O.D.E.
 INTRODUCTION TO COMPUTER METHODS FOR O.D.E. 0. Introduction. The goal of this handout is to introduce some of the ideas behind the basic computer algorithms to approximate solutions to differential equations.
INTRODUCTION TO COMPUTER METHODS FOR O.D.E. 0. Introduction. The goal of this handout is to introduce some of the ideas behind the basic computer algorithms to approximate solutions to differential equations.
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Computer Representation of Numbers Counting numbers (unsigned integers) are the numbers 0,
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Computer Representation of Numbers Counting numbers (unsigned integers) are the numbers 0,
5.2 - Euler s Method
 5. - Euler s Method Consider solving the initial-value problem for ordinary differential equation: (*) y t f t, y, a t b, y a. Let y t be the unique solution of the initial-value problem. In the previous
5. - Euler s Method Consider solving the initial-value problem for ordinary differential equation: (*) y t f t, y, a t b, y a. Let y t be the unique solution of the initial-value problem. In the previous
Notes on uniform convergence
 Notes on uniform convergence Erik Wahlén erik.wahlen@math.lu.se January 17, 2012 1 Numerical sequences We begin by recalling some properties of numerical sequences. By a numerical sequence we simply mean
Notes on uniform convergence Erik Wahlén erik.wahlen@math.lu.se January 17, 2012 1 Numerical sequences We begin by recalling some properties of numerical sequences. By a numerical sequence we simply mean
Exponential Growth and Decay
 Exponential Growth and Decay Warm-up 1. If (A + B)x 2A =3x +1forallx, whatarea and B? (Hint: if it s true for all x, thenthecoe cients have to match up, i.e. A + B =3and 2A =1.) 2. Find numbers (maybe
Exponential Growth and Decay Warm-up 1. If (A + B)x 2A =3x +1forallx, whatarea and B? (Hint: if it s true for all x, thenthecoe cients have to match up, i.e. A + B =3and 2A =1.) 2. Find numbers (maybe
Solution: (a) Before opening the parachute, the differential equation is given by: dv dt. = v. v(0) = 0
 Before opening the parachute, the differential equation is given by: dv dt. = v. v(0) = 0") Math 2250 Lab 4 Name/Unid: 1. (35 points) Leslie Leroy Irvin bails out of an airplane at the altitude of 16,000 ft, falls freely for 20 s, then opens his parachute. Assuming linear air resistance ρv ft/s
Math 2250 Lab 4 Name/Unid: 1. (35 points) Leslie Leroy Irvin bails out of an airplane at the altitude of 16,000 ft, falls freely for 20 s, then opens his parachute. Assuming linear air resistance ρv ft/s
Section 3.9. The Geometry of Graphs. Difference Equations to Differential Equations
 Difference Equations to Differential Equations Section 3.9 The Geometry of Graphs In Section. we discussed the graph of a function y = f(x) in terms of plotting points (x, f(x)) for many different values
Difference Equations to Differential Equations Section 3.9 The Geometry of Graphs In Section. we discussed the graph of a function y = f(x) in terms of plotting points (x, f(x)) for many different values
Homework and Computer Problems for Math*2130 (W17).
.") Homework and Computer Problems for Math*2130 (W17). MARCUS R. GARVIE 1 December 21, 2016 1 Department of Mathematics & Statistics, University of Guelph NOTES: These questions are a bare minimum. You should
Homework and Computer Problems for Math*2130 (W17). MARCUS R. GARVIE 1 December 21, 2016 1 Department of Mathematics & Statistics, University of Guelph NOTES: These questions are a bare minimum. You should
SHORT ANSWER. Write the word or phrase that best completes each statement or answers the question.
 SHORT ANSWER. Write the word or phrase that best completes each statement or answers the question. Sketch the region bounded between the given curves and then find the area of the region. ) y =, y = )
SHORT ANSWER. Write the word or phrase that best completes each statement or answers the question. Sketch the region bounded between the given curves and then find the area of the region. ) y =, y = )
Direct Proof Floor and Ceiling
 Direct Proof Floor and Ceiling Lecture 17 Section 4.5 Robb T. Koether Hampden-Sydney College Wed, Feb 12, 2014 Robb T. Koether (Hampden-Sydney College) Direct Proof Floor and Ceiling Wed, Feb 12, 2014
Direct Proof Floor and Ceiling Lecture 17 Section 4.5 Robb T. Koether Hampden-Sydney College Wed, Feb 12, 2014 Robb T. Koether (Hampden-Sydney College) Direct Proof Floor and Ceiling Wed, Feb 12, 2014
Ordinary Differential Equations I
 Ordinary Differential Equations I CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Ordinary Differential Equations I 1 / 35
Ordinary Differential Equations I CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Ordinary Differential Equations I 1 / 35
Introduction to Nonlinear Optimization Paul J. Atzberger
 Introduction to Nonlinear Optimization Paul J. Atzberger Comments should be sent to: atzberg@math.ucsb.edu Introduction We shall discuss in these notes a brief introduction to nonlinear optimization concepts,
Introduction to Nonlinear Optimization Paul J. Atzberger Comments should be sent to: atzberg@math.ucsb.edu Introduction We shall discuss in these notes a brief introduction to nonlinear optimization concepts,
Autonomous means conditions are constant in time, though they may depend on the current value of y.
 18.03 Class 8, Feb 19, 2010 Autonomous equations [1] Logistic equation [2] Phase line [3] Extrema, points of inflection Announcements: Final Tuesday, May 18, 9:00-12:00, Johnson Track Hour exam next Wednesday:
18.03 Class 8, Feb 19, 2010 Autonomous equations [1] Logistic equation [2] Phase line [3] Extrema, points of inflection Announcements: Final Tuesday, May 18, 9:00-12:00, Johnson Track Hour exam next Wednesday:
Computation Fluid Dynamics
 Computation Fluid Dynamics CFD I Jitesh Gajjar Maths Dept Manchester University Computation Fluid Dynamics p.1/189 Garbage In, Garbage Out We will begin with a discussion of errors. Useful to understand
Computation Fluid Dynamics CFD I Jitesh Gajjar Maths Dept Manchester University Computation Fluid Dynamics p.1/189 Garbage In, Garbage Out We will begin with a discussion of errors. Useful to understand
Interval Methods and Taylor Model Methods for ODEs
 Interval Methods and Taylor Model Methods for ODEs Markus Neher, Dept. of Mathematics KARLSRUHE INSTITUTE OF TECHNOLOGY (KIT) 0 TM VII, Key West KIT University of the State of Baden-Wuerttemberg and Interval
Interval Methods and Taylor Model Methods for ODEs Markus Neher, Dept. of Mathematics KARLSRUHE INSTITUTE OF TECHNOLOGY (KIT) 0 TM VII, Key West KIT University of the State of Baden-Wuerttemberg and Interval
Design and Analysis of Algorithms Lecture Notes on Convex Optimization CS 6820, Fall Nov 2 Dec 2016
 Design and Analysis of Algorithms Lecture Notes on Convex Optimization CS 6820, Fall 206 2 Nov 2 Dec 206 Let D be a convex subset of R n. A function f : D R is convex if it satisfies f(tx + ( t)y) tf(x)
Design and Analysis of Algorithms Lecture Notes on Convex Optimization CS 6820, Fall 206 2 Nov 2 Dec 206 Let D be a convex subset of R n. A function f : D R is convex if it satisfies f(tx + ( t)y) tf(x)
Series Solutions. 8.1 Taylor Polynomials
 8 Series Solutions 8.1 Taylor Polynomials Polynomial functions, as we have seen, are well behaved. They are continuous everywhere, and have continuous derivatives of all orders everywhere. It also turns
8 Series Solutions 8.1 Taylor Polynomials Polynomial functions, as we have seen, are well behaved. They are continuous everywhere, and have continuous derivatives of all orders everywhere. It also turns
Ordinary Differential Equations I
 Ordinary Differential Equations I CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Ordinary Differential Equations I 1 / 27 Theme of Last Three
Ordinary Differential Equations I CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Ordinary Differential Equations I 1 / 27 Theme of Last Three