An efficient time integration method for extra-large eddy simulations
|
|
|
- Sabrina Carpenter
- 5 years ago
- Views:
Transcription





1 A efficiet time itegratio method for extra-large eddy simulatios M.A. Scheibeler Departmet of Mathematics
2
3 Master s Thesis A efficiet time itegratio method for extra-large eddy simulatios M.A. Scheibeler Supervisor: Prof.dr. A.E.P. Veldma Departmet of Mathematics Uiversity of Groige P.O. Box AV Groige August 005
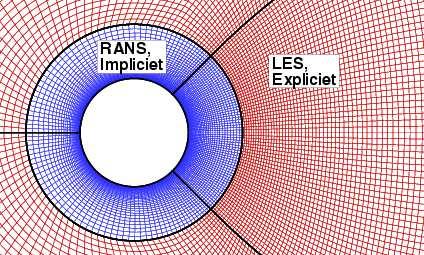
4
5 - - Summary The calculatio of the dyamic loads o space lauchers is importat for the desig ad optimisatio of space lauchers. With aerodyamic calculatios these time-depedet aerodyamic loads could be calculated usig Extra-Large Eddy Simulatios (X-LES). X-LES simulatios solve more details of the flow physics tha Reyolds-averaged Navier Stokes (RANS), without the costs of a full Large Eddy Simulatio (LES). Noetheless, these time-accurate simulatios cost a lot of computatioal time, therefore a efficiet time itegratio method has bee desiged. It takes thousads of time steps to get statistically coverged data for X-LES. For these time steps, implicit time itegratio, based o dual time steppig method is curretly used. I the LES regio the physical (accuracy) time step is of the same order as the umerical (stability) time step. Therefore it is more efficiet to use a explicit time itegratio method, with a few relaxatios i the LES regio. The grid cells i the RANS regio, especially the boudary layer, are much smaller tha i the LES regio, hece i the RANS regio a explicit time itegratio method is ot efficiet. I the RANS regio the implicit time itegratio method based o the dual time steppig will be used, but i the LES regio the time itegratio method will be replaced with a explicit method. The couplig betwee the time itegratio method o the iterface of the RANS ad the LES regio will be desiged. The couplig that has bee desiged is secod order accurate, stable ad coservative. These aspects are aalysed i this documet. The couplig is implemeted i a multi-block Euler/Navier Stokes flow solver. Test cases show that if the implicit ad explicit regio are of the same size, the the speedup is two with respect to a fully implicit calculatio.
6 - - Cotets List of figures 5 Itroductio 7 Accuracy of discretisatio methods for the wave equatio 9. The couplig problem betwee implicit ad explicit blocks 9. Sigle step methods.. Froze poit i explicit block (Es 0 IE).. Froze poit i implicit block (IsEI) Liear extrapolatio i explicit block (E sie) 6..4 Liear extrapolatio i implicit block (I sei) 6..5 Quadratic extrapolatio i explicit block (Es IE) 7..6 Quadratic extrapolatio i implicit block (Is EI) 8..7 Extrapolatio i the implicit block (Is EI) 0.3 Predictor-Corrector methods.3. Ruge Kutta step i the implicit block (Ip RK EI c ) 3.3. Half implicit B3 step (Ip B3EI c) Lax Wedroff i the explicit regio (Ep LW IE c ) Liear extrapolatio ad explicit predictor (IsE p IE c ) Two froze poits ad explicit predictor ((IE) 0 se p IE c ) Two liear estimatios ad explicit predictor ((IE) s E pie c ) 9.4 Ruge Kutta with four stages 3.4. Ruge Kutta step i the implicit block (I RK p EI c ) U + 3 froze Oe Ruge Kutta step for U Extrapolatio of U + with U+ 4, U ad U Extrapolatio of U + with U+ 4, U ad U Extrapolatio i the implicit block (Is EI) 39.5 Couplig implicit with secod order accuracy with Ruge Kutta Ruge Kutta with two stages Liear iterpolatio Quadratic iterpolatio First order iterpolatio 4.5. Ruge Kutta with four stages 43
7 Secod order methods 45 3 Stability ad coservatio Stability aalysis Two liear estimatios ad explicit predictor ((IE) se p IE c ) Quadratic extrapolatio, (E sie) Extrapolatio i the implicit block 5 3. Coservatio Adams Bashforth predictio ((IE) se p IE c ) Step 3 for the covectio equatio ad Ruge Kutta with two stages Step 3 for the covectio equatio ad Ruge Kutta with four stages Step for the diffusio equatio Step 3 for the diffusio equatio ad Ruge Kutta with two stages Step 3 for the diffusio equatio ad Ruge Kutta with four stages Ruge Kutta o the iterface ad correctig the last stage ((IE) RK p I c E c ) Step for the covectio equatio ad Ruge Kutta with four stages Step for the diffusio equatio ad Ruge Kutta with four stages Step 3 for the covectio equatio ad Ruge Kutta with four stages Step 3 for the diffusio equatio ad Ruge Kutta with four stages Ruge Kutta o the iterface ad extrapolated fluxes ((IE) RK p Es I c ) Step for the covectio equatio ad Ruge Kutta with four stages Step for the diffusio equatio ad Ruge Kutta with four stages Stability of the coservative methods Secod order ad coservative methods 75 4 Implemetatio 77 5 Results Uiform flow o uiform grid Restartig a uiform flow with a differet agle Uiform flow o cylider grid Restartig a uiform flow o the cylider grid Flow aroud a cylider for Re = 5000, calculated with RANS Flow aroud a cylider for Re = 0 6, calculated with X-LES Order of accuracy for flow aroud a cylider for Re = 500, calculated with RANS 9
8 - 4-6 Cocludig remarks 93 7 Refereces 95 5 Tables 46 Figures Appedices 97 A Software desig 97 A. Modified procedures 99 A. New procedures 06 (07 pages i total)
9 - 5 - List of figures Figure Implicit B3 stecil. 9 Figure Explicit Ruge Kutta stecil. 0 Figure 3 Iterface problem betwee implicit ad explicit block. Figure 4 Implicit stecil with froze poit. 3 Figure 5 Explicit stecil with froze poit. 5 Figure 6 Liear extrapolatio of Ui+ + ad substituted i the B3 method. 6 Figure 7 Liear extrapolatio ad substitutio i Ruge Kutta method. 7 Figure 8 Quadratic extrapolatio ad substitutio i B3 method. 8 Figure 9 Quadratic extrapolatio ad substitutio i Ruge Kutta method. 0 Figure 0 Oe Ruge Kutta step i implicit block. 4 Figure Half implicit time step. 5 Figure Lax Wedroff ad implicit B3 method 6 Figure 3 Predictor corrector steps 7 Figure 4 Explicit method as predictor. 8 Figure 5 Two estimatios with Ruge Kutta as predictor. 30 Figure 6 Two estimatios by liear extrapolatio. 3 Figure 7 Ruge Kutta with four stages. 33 Figure 8 Ruge Kutta four o the boudary of the explicit ad implicit regio. 34 Figure 9 Ruge Kutta four o the boudary with a estimatio of U Figure 0 Ruge Kutta four o the boudary with a estimatio of U Figure Ruge Kutta four with a estimatio of the poit U Figure Ruge Kutta four with a estimatio of the poit U Figure 3 Ruge Kutta four with approximatios for U + ad U Figure 4 Grid used for stability aalysis 46 Figure 5 Figure 6 Spectral radius for differet umber of grid poits for implicit B3 (otated as im), Ruge Kutta (rk), (IE) s E pie c (ab) ad Es IE (qe) 48 Spectral radius for differet umber of grid poits for implicit B3, Ruge Kutta, (IE) se p IE c ad E sie 48 Figure 7 Eigevectors correspodig to the eigevalue, λ =, for CFL =. 49 Figure 8 Eigevector correspodig to the largest eigevalue for (IE) s E pie c 50 Figure 9 Eigevector correspodig to the largest eigevalue for Es IE 5
10 - 6 - Figure 30 Spectral radius for differet CFL for implicit B3 (otated as im), Ruge Kutta (rk), extrapolatio as give i equatio (36), (3) ad (34) (respectively otated as ex-im, ex ad ex) 5 Figure 3 Cotrol volumes o iterface 53 Figure 3 Iterpolatig fluxes for the last Ruge Kutta stage 55 Figure 33 Fluxes used for the implicit B3 method 60 Figure 34 Extrapolatig fluxes for the flux of the implicit domai 7 Figure 35 Spectral radius of differet CFL for the coservative methods 75 Figure 36 Residuals of uiform flow, with couplig 80 Figure 37 Residuals of uiform flow, without couplig 80 Figure 38 Residuals, restart of uiform flow with a agle of 30 degrees 8 Figure 39 Grid aroud a cylider, two times coarser 8 Figure 40 Residuals of uiform flow o cylider grid, with couplig 83 Figure 4 Residuals of uiform flow o cylider grid, without couplig 83 Figure 4 Residuals, restart of uiform flow o o-uiform grid 84 Figure 43 Lift coefficiet of flow aroud a cylider, with couplig 86 Figure 44 Lift coefficiet of flow aroud a cylider, with ad without couplig 86 Figure 45 Pressure behid a two dimesioal cylider, simulated with RANS 88 Figure 46 Turbulet Reyolds umber of a three-dimesioal cylider simulated with X-LES 9
11 - 7 - Itroductio Computig the exteral flow over space vehicles is importat for the desig ad optimisatio of space lauchers. The usteady flow emaatig from the cetral core creates usteady forces o the ozzle of a space laucher. With aerodyamic calculatios the loads o the ozzle could be calculated. These time-depedet simulatios cost a lot of computatioal time, therefore it is desirable to improve the efficiecy of the time itegratio method. For accurate calculatio of the dyamic flow, the X-LES model is used. Extra-Large Eddy Simulatio (X-LES) cosist of the Reyolds-averaged Navier Stokes (RANS) equatios with Large Eddy Simulatio (LES), where the RANS model is used i the boudary layers ad the LES model is used i the other parts of the flow. X-LES simulatios solve more details of the flow physics tha RANS, without the costs of a full LES simulatio. It takes thousads of time steps to get statistically coverged data for X-LES. Origially, implicit time itegratio is used, with the dual time steppig method cosistig of roughly a hudred relaxatios for each time step. I the LES regio the physical time step is of the same order as the umerical time step, so a explicit time itegratio, with a few relaxatios for each time step, is sufficiet. I the RANS regio, especially i the boudary layer, a explicit time itegratio method is ot efficiet. The grid cells i the RANS regio are much smaller tha i the LES regio ad if a explicit method is used i the RANS regio, a very small time step is ecessary, due to the Courat-Friedrichs-Levy (CFL) restrictio. Therefore, i the RANS regio the implicit time itegratio method, based o dual time steppig, is maitaied ad i the LES regio a explicit time itegratio method will be used. Chagig the time itegratio method o the LES regio results i a couplig of the time itegratio methods o the iterface of the RANS ad the LES regio. The iterface of the RANS ad LES regio is dyamical, but the couplig betwee the explicit ad implicit time itegratio will be o a fixed iterface. The RANS regio is approximately half the grid, coutig i grid poits, so o half the grid a explicit method will be used ad o the other half a implicit method will be used. Coutig oly the operatios of the implicit time itegratio ad eglectig the operatios of explicit time itegratio, the speedup is two with respect to oly implicit time itegratio o the grid. The couplig betwee the RANS ad the LES regio must satisfy the followig criteria: The RANS regio with the implicit time itegratio method is secod order accurate i time ad space. The low-storage Ruge Kutta scheme with four stages will be used o the LES regio. This explicit time itegratio method is secod order accurate for o-liear equatios. The couplig betwee the implicit ad explicit time itegratio methods must be secod order accurate.
12 - 8 - The implicit time itegratio method is ucoditioally stable ad the explicit time itegratio method is coditioally stable. The couplig must be as stable as the explicit time itegratio method. For correct predictio of shocks the couplig o the iterface must be coservative. The couplig betwee the RANS e LES regio is desiged for the NLR multi-block Euler/Navier Stokes flow solver ENSOLV. The flow solver ENSOLV is suitable for the simulatio of 3D, steady or time-depedet, compressible flows aroud complex aerodyamic cofiguratios. The flow equatios are the Euler ad/or Reyolds-averaged Navier Stokes equatios, cosistig of five partial differetial equatio describig the coservatio of mass, mometum ad total eergy. The turbulet flows are described with the RANS equatios; to close the RANS equatios liear eddy-viscosity models are used. The cotiuous mathematical model of the flow solver ENSOLV is described i referece 7. The flow equatios are discretised i space by a cell-cetred, fiite volume method, usig multi-block structured grids, cetral differeces ad artificial diffusio. The steady flow equatios are solved by marchig i pseudo time usig a multi-grid scheme, with explicit Ruge Kutta time itegratio as relaxatio operator. The discrete mathematical model ad solutio procedure ca be foud i referece 6. For the usteady flow equatios two solutio procedures ca be used: time accurate Ruge Kutta time itegratio ad the dual-time steppig method. The dual-time steppig method itegrates the usteady equatios i time by a secod-order implicit scheme; the resultig o-liear implicit equatios ca be solved with the steady-state solutio procedure, see referece 8. After the itroductory chapter the accuracy of several discretisatio methods for the couplig betwee the implicit ad explicit time itegratio methods will be aalysed for a model problem i chapter. Subsequetly the stability ad coservatio aalysis of several discretisatio methods is described i chapter 3. Fially, i chapter 5, the results of test cases for a solutio method with partly implicit ad partly explicit time itegratio ad a compariso with fully implicit time itegratio are preseted.
13 - 9 - Accuracy of discretisatio methods for the wave equatio This chapter discusses the discretisatio error of umerical methods for solvig the simple-wave equatio: u t = a u x. () The wave equatio is hadled such that it becomes a model problem for the couplig betwee the Reyolds-averaged Navier Stokes (RANS) ad Large Eddy Simulatio (LES) regio. The equatio will be discretised o a uiform grid with grid poits (x i,t ) ad usig a cell-cetered approach. The regio is divided ito two blocks; oe block implicitly itegratig equatio () ad the other block explicitly itegratig the equatio. To couple these two blocks, problems at the iterface appear. This results i a couplig problem betwee the two blocks.. The couplig problem betwee implicit ad explicit blocks Oe block itegrates equatio () with a implicit discretisatio method ad uses the dual time steppig method. The derivative i time is approximated usig a secod-order backward differece ad the derivative i space is approximated usig a cetral differece, which results for the iterior poits i 3U + i 4U i + U i t = a U+ i+ U+ i + τ, () x with local trucatio error τ = O( t ) + O( x ). The order of the accuracy of the implicit method is two, it is cosistet ad ucoditioally stable. This implicit method is the method of Baker ad Oliphat, or the B3-method, ad the stecil ca be see i figure. + x x t t i i i+ Fig. Implicit B3 stecil. The other block itegrates equatio () with a explicit discretisatio method; we start with Ruge Kutta with two-stages ad coefficiets α = ad α =. I subsectio.4 we also
14 - 0 - cosider Ruge Kutta with four stages. For a iterior poit, Ruge Kutta with two stages results i U + U + U t U t = a U+ U, (3) x = a U+ + U+. (4) x Substitutig equatio (3) i equatio (4) results i U + U t = a U + U x + a t U+ U + U 8 x + τ, (5) with local trucatio error τ = O( t ) + O( x ). Ruge Kutta with two-stages is a method of order two. The method is cosistet ad coditioally stable for the explicit regio. The stecil of this method ca be see i figure. + +/ / t / t x x + + Fig. Explicit Ruge Kutta stecil. Cosider the iterface betwee the implicit ad explicit block. Let poit x i lie to the left of the iterface i the implicit block. Let poit x lie to the right of the iterface i the explicit block. Near the iterface betwee the two blocks, the implicit method eeds oe poit which lies i the explicit regio ad this poit is ukow. So, if the implicit method calculates Ui + ear the iterface, the the value Ui+ + of the other block (the explicit regio) is eeded, see figure 3(a). For equatio (), this meas that Ui+ + should be replaced for a estimatio of this value. O the other had, if the explicit method is used to calculate a ew poit ear the iterface of the explicit regio, also oe poit of the other block is eeded. Particularly, if with the explicit method the value U + is calculated, the i the secod Ruge Kutta step the value U + figure 3(b). This value U + The value U + is eeded, see lies i the other block (the implicit regio) ad it is also ukow. caot be calculated with a Ruge Kutta stage, so it must be estimated i a
15 - - + x? t t i i i+ + / t +/? / t x x + + implicit explicit implicit explicit (a) Implicit stecil (b) Explicit stecil Fig. 3 Iterface problem betwee implicit ad explicit block. differet way. For equatio (4) this meas that equatio (3) ca oly be used for the value U + + ad ot for U +. This substitutio is show i equatio (6) U + U t = a U + U+ x + a t U+ U 8 x + τ. (6) Both methods, implicit ad explicit, with the discretisatio as give i equatio () ad equatio (6), respectively, require a ukow grid poit. To couple the implicit regio to the explicit regio aother discretisatio method should be cosidered.. Sigle step methods To couple the implicit regio to the explicit regio oe of the ukow grid poits, U + i+ or U+, should be approximated. Oe criterio for this couplig is that this couplig must be secod order accurate. There are several ways to couple the implicit ad explicit regio, for example usig extrapolatio or predictor-corrector schemes. This sectio cosiders discretisatio methods that take oe explicit Ruge Kutta step ad take oe implicit B3 step. If both, the Ruge Kutta step ad the implicit B3 step, are secod order accurate, the the couplig betwee the implicit ad explicit block is secod order accurate. If we take first the explicit Ruge Kutta step, the followig steps are made:. Estimate the ukow value U + (I s).. Explicit time itegratio, for calculatig the poit U + (E).
16 Implicit time itegratio, take this step if step is secod order accurate (I). First we explai the otatio of these steps. The I s meas a estimatio i the implicit block. A estimatio i the explicit block is otated as E s. A superscript of the I s or E s idicates the kid of estimatio, for example E s meas a estimatio i the explicit block of order oe. The E ad I stads for explicit ad implicit time itegratio, respectively. The estimatio of step has to be such that the explicit Ruge Kutta step (step ) is secod order accurate. With this secod order estimatio of U +, all iformatio for the implicit B3 method is available. So the implicit B3 step will also be secod order if the explicit Ruge Kutta step is secod order accurate. O the other had, if we take first the implicit B3 step, the the steps are as follows:. Estimate the ukow value Ui+ + (E s).. Implicit time itegratio, for calculatig the poit Ui + (I). 3. Explicit time itegratio, take this step if step is secod order accurate (E). The first estimatio has to be such that the implicit B3 step is secod order accurate. If the implicit B3 step is secod order accurate, the the explicit Ruge Kutta step ca be take. Step 3 still requires the ukow value U +, which must be determied by some form of iterpolatio, usig computed i step. This issue will be cosidered i subsectio.5. The ext subsectios U + i (. to.4) variates the first estimatio i the implicit regio (I s ) or the estimatio i the explicit regio (E s ). We wat these estimatios such that step, the time itegratio, is secod order... Froze poit i explicit block (E 0 s IE) First we cosider a simple approximatio of the poit (x i+,t + ) ear the iterface ad use this approximatio i the implicit method. Take the ukow value U + i+ equal to its value at time t, so U + i+ = U i+. The otatio for this estimatio is E0 s, this meas a estimatio i the explicit block of order zero. E 0 sie stads for the discretisatio with froze poit, followed by implicit ad explicit itegratio. Figure 4 shows the stecil of this estimatio with the implicit time itegratio. Substitutig the estimatio, Ui+ + = U i+, i equatio () gives 3U + i 4U i + U i t = a U i+ U+ i x + τ. (7) For the derivatio of the local trucatio error, we eed Taylor series i two variables. Suppose that u(x,t) ad all its partial derivatives of order less tha or equal to m + are cotiuous o
17 x t i i i+ implicit explicit Fig. 4 Implicit stecil with froze poit. D = {(x,t) a x b, c t d} ad let (x 0,t 0 ) D. For every (x,t) D, there exists µ betwee x ad x 0 ad ξ betwee t ad t 0 with u(x,t) = P m (x,t) + R m (x,t), where P m (x,t) = u(x 0,t 0 ) + (x x 0 ) u x (x 0,t 0 ) + (t t 0 ) u t (x 0,t 0 ) + (x x 0) u x (x 0,t 0 ) + (x x 0 )(t t 0 ) u x t (x 0,t 0 ) + (t t 0) u t (x 0,t 0 ) + + m! ( ) m m =0 (x x 0 ) m (t t 0 ) m u x m t (x 0,t 0 ) ad R m = (m + )! m+ =0 ( m + ) (x x 0 ) m+ (t t 0 ) m+ u x m+ t (µ,ξ). The fuctio P m (x,t) is the m-th Taylor polyomial i two variables ad R m (x,t) is the remaider term associated with P m (x,t), see referece. For all fuctios U i equatio (7) we calculate the Taylor series i two variables. We cosider a uiform grid with mesh size x i the x-directio ad take time steps with t. Istead of writig
18 - 4 - U(x i,t + ) i the Taylor series, we write U(x i,t + ) = Ui +. The Taylor series are with respect to (x 0,t 0 ) = (x i,t + ) ad they are as follows: U i = U + i U i+ = U + i t u t + u xi,t + t t u xi,t + 6 t3 3 t 3, µ,ξ + x u x t u xi,t + t + u xi,t + x x t x u x t + u xi,t + t t + u xi,t + 6 x3 3 x 3 xi,t + µ,ξ + t x 3 u x t µ,ξ t x 3 u x t u µ,ξ 6 t3 3 t 3, µ,ξ Ui = Ui + Ui + = Ui + t u t + t u xi,t + t xi,t t3 3 u t 3, µ,ξ x u x + u xi,t + x x u xi,t + 6 x3 3 x 3. µ,ξ With these Taylor series the derivatives i time ad space ca be estimated for the implicit B3 method with U + i+ froze. u t = 3U+ i xi,t + u x = U i+ U+ i xi,t + x Fially we fid: x 6 4U i + U i t + t x + 3 t 3 u t 3, µ,ξ u t + t u xi,t + x t t xi,t + 4 x 3 u x 3 + x t 3 u µ,ξ 4 x t t 3 u µ,ξ 4 x t + t3 µ,ξ x u t 3 u t 3 xi,t +. µ,ξ 3U + i 4U i + U i t = a U i+ U+ i x + O( t x ) + O( t) + O( x ) + O( t x). This discretisatio has bee obtaied by replacig the value Ui+ + of equatio () by the value. It is foud to be ot cosistet, because the local trucatio error does ot approach zero as U i+ t ad x approach zero i a similar way (which usually is the case, because the CFL-umbers are O()).
19 Froze poit i implicit block (I 0 s EI) I subsectio.. we approach the ukow value at time t + ear the iterface with the value oe time step earlier, at time t. A similar approach i the implicit regio ca be doe for the ukow value U +. We take U+ i the iterface equal to U. This estimatio ca be substituted i the Ruge Kutta scheme, as show i figure / / t / t x x + + implicit explicit Fig. 5 Explicit stecil with froze poit. So substitutig U + = U i equatio (6) results i: U + U t = a U + + U x a t U+ U 8 x + τ. (8) The local trucatio error ca be derived with the use of Taylor series. These Taylor series are with respect to (x 0,t 0 ) = (x,t + ). The derivative i time ad space are respectively u t u x x,t + x,t + = U+ U t = U + U x + t u t x a t u 4 x x a t x 6 t 4 x,t + x,t + 3 u t 3 µ,ξ a t U+ U 8 x x 6 a t 4 3 u x 3 t 3 u µ,ξ 8 x t u x x,t + + a t 8 x µ,ξ u t x 3 u x 3 + a t 3 u µ,ξ 8 x t a t3 3 u µ,ξ 3 x x t x,t + From here we ca coclude that the discretisatio scheme give i equatio (8) has the followig local trucatio error: τ = O( t x ) + O( t) + O( x ) + O( t x). µ,ξ
20 - 6 - The trucatio error has the order ( t x ), so this discretisatio scheme is also ot cosistet. The froze poit i the implicit regio, followed by the explicit Ruge Kutta time itegratio ad fially the implicit time itegratio is idicated as I 0 sei...3 Liear extrapolatio i explicit block (E s IE) ad U i+ A liear approximatio of the value Ui+ + i the iterface with U i+ Ui+ U i+. This extrapolatio of U+ i+ results i the discretisatio scheme: is: U+ i+ = 3U + i 4U i + U i t = a U i+ U i+ U+ i + τ, (9) x with trucatio error τ = O( t x ) + O( x ) + O( t ). O the iterface betwee the implicit ad explicit block the CFL-umber is usually chose betwee oe ad three. If t ad x are proportioally goig to zero, the this method is cosistet ad the method is first order accurate The stecil of equatio (9) is give i figure 6, the dashed arrow shows the liear extrapolatio of the poit Ui+ +. This poit is substituted i the implicit B3 method. The otatio E sie meas: first liear extrapolatio i the explicit regio, followed by implicit B3 ad explicit Ruge Kutta. + x t t i i i+ implicit explicit Fig. 6 Liear extrapolatio of U + i+ ad substituted i the B3 method...4 Liear extrapolatio i implicit block (I s EI) A liear estimatio ca also be doe i the implicit block for the value U +. The liear extrapolatio of U + is give by U+ = 3 U U. Figure 7 shows the liear extrapolatio
21 - 7 - (dashed arrow) substituted i Ruge Kutta. The substitutio of the extrapolatio of U + equatio (6) results i i U + U t = a U + 3 U + U x + a t U+ U 8 x + τ, (0) with τ = O( t x ) + O( t) + O( x ) + O( t x). The local trucatio error is of the same order as the trucatio error of the implicit method with liear extrapolatio. The explicit method with liear extrapolatio (I sei) is cosistet ad first order accurate whe the CFL-umber is O(). + +/ / t x x + + implicit explicit Fig. 7 Liear extrapolatio ad substitutio i Ruge Kutta method...5 Quadratic extrapolatio i explicit block (E s IE) First we have take a zero order extrapolatio, the a liear extrapolatio ad i this subsectio we take a quadratic extrapolatio for the value Ui+ + i the iterface of the explicit regio, we use the values Ui+,U i+. For the approximatio of U+, the value ad U i+ : i+ U + i+ = 3U i+ 3U i+ + U i+. Usig this quadratic extrapolatio i the implicit B3 method gives a secod order discretisatio scheme 3U + i 4U i + U i t = a 3U i+ 3U i+ + U i+ U+ i + τ, () x
22 - 8 - with trucatio error τ = O( t3 x ) + O( t ) + O( x ). Figure 8 shows the stecil of this method, first quadratic extrapolatio (arrow) ad the the substitutio i the B3 method. Quadratic extrapolatio followed by a implicit time step is secod order accurate. The ext step, a Ruge Kutta step i the explicit block, is worth to be take. + x t t i i i+ implicit explicit Fig. 8 Quadratic extrapolatio ad substitutio i B3 method...6 Quadratic extrapolatio i implicit block (I s EI) For the explicit block the value U + ca also be approximated usig quadratic extrapolatio: 8U + = 5U 0U + 3U. Substitutig U + i the Ruge Kutta method, equatio (6), gives the followig equatio U + U t = a 8U + 5U + 0U 3U 6 x + a t U+ U 8 x + τ, () with trucatio error τ = O( t x ) + O( t ) + O( x ) + O( t x).
23 - 9 - This method is ot secod order, but first order accurate. This will be demostrated with Taylor series. The Taylor series from the derivative i time ad space are with respect to (x 0,t 0 ) = (x,t + ) ad these derivatives are give by the followig equatio. u t u x x,t + x,t + = U+ U t t 4 3 u t 3, µ,ξ = 8U + 5U + 0U 3U 6 x + t 4 x t 6 u t + a t u 4 x x + a t x 6 x,t + + t 4 u x t x,t + a t U+ U 8 x t 6 x 3 u x t + t x 3 u µ,ξ 8 x t 7 t3 µ,ξ 48 x x,t + + a t 4 u x x,t + a t 8 x u t 3 u t 3 x,t + x 3 u µ,ξ 6 x 3 u t x x,t + 3 u x 3 a t 3 u µ,ξ 8 x t + a t3 3 u µ,ξ 3 x x t. µ,ξ µ,ξ Usig equatio () a couple of terms i the derivative i space vaish: u x x,t + = 8U + 5U + 0U 3U 6 x t 6 x + a t x 4 u t x,t + a t 8 x u t x x,t + a t U+ U 8 x + t 6 3 u x 3 7 t3 3 µ,ξ 96 x t 3 x 3 u µ,ξ 6 x 3. µ,ξ 3 u x t (3) µ,ξ From here we see that, the secod order derivatives i the Taylor series are resposible for the first order accuracy of the discretisatio. This discretisatio is show i figure 9.
24 / / t x / t x + + implicit explicit Fig. 9 Quadratic extrapolatio ad substitutio i Ruge Kutta method...7 Extrapolatio i the implicit block (Is EI) As show i subsectio..6, quadratic extrapolatio of the value U + i the Ruge Kutta method results i a first order accuracy. To get a higher accuracy we take a combiatio of U, U ad U such that with this combiatio the Ruge Kutta method becomes secod order. I other words, we extrapolate the value U + (3) vaish. such that the secod order derivatives of equatio To calculate the coefficiets of the extrapolatio, we first take a extrapolatio with three ukow parameters: U + = αu + βu + γu. To determie α, β ad γ we substitute this extrapolatio i equatio (6). The result is as follows: U + U t = a U + αu βu γu x + a t U+ U 8 x + τ. (4) With Taylor series the local trucatio error ca be estimated. The derivatives i time ad space
25 - - are: u t η u x x,t + x,t + = U+ U t t 4 3 u t 3, µ,ξ = U + αu βu γu x + ( α 3β 5γ) t 4 x + ( + α + 3β + 5γ) t 4 + ( α β γ) x u t u t x + ( α 9β 5γ) t 6 a t U+ U 8 x + a t x 6 + a t u 4 x x x,t + x,t + + ( + α + β + γ) U+ x + ( + α + β + γ) x u 4 x + ( + α + 9β + 5γ) t 6 x 3 u x 3 + ( α 3β 5γ) t x 3 u µ,ξ 8 t x 3 u t x + ( α 9β 5γ) t3 µ,ξ 96 x x,t + + a t 4 u x x,t + 3 u x 3 a t 3 u µ,ξ 8 t x + a t3 3 u µ,ξ 3 x t x, µ,ξ a t 8 x x,t + u t µ,ξ 3 u t 3 u t x x,t + µ,ξ x,t + with η = ( + α + β + γ). Rewritig the last equatio with oly the first ad secod order derivatives ad usig equatio () results i: η u x x,t + = U + αu βu γu x + ( + α + β + γ) U+ x + ( α 3β 5γ) t 4 x + ( + α + 3β + 5γ) t 4 a t U+ U 8 x + ( + α + β + γ) x 4 u t u t x + ( + α + 9β + 5γ) t 6 x x,t + x,t + u t t 4 x t 4 x,t + u t u t x + t 8 x u x x,t + x,t + u t x,t + x,t + + h.o.
26 - - To get a secod order method, the first ad secod order derivate must vaish. This gives the followig system of equatios: α + β + γ = α + 3β + 5γ = 0 α + 9β + 5γ = = α = 7 4 β = γ = 4 With the extrapolatio give i equatio (5) oly the third order derivatives are left. U + = 7 4 U U + 4 U. (5) This extrapolatio results i the followig discretisatio: U + U t = a U U + U 4 U x + a t U+ U 8 x + τ, (6) with trucatio error τ = O( t3 x ) + O( t ) + O( x ) + O( t x). Extrapolatio of the value U + as give i equatio (5) results i a Ruge Kutta method which is secod order accurate. Therefore the implicit regio ca ow take a implicit B3 step..3 Predictor-Corrector methods I the ext three subsectios the first step, the estimatio of the ukow value, is differet from the discretisatios i sectio.. Istead of extrapolatig the value at time t + or t +, the ukow value is calculated usig a discretisatio method. If we calculate the value i the iterface i the implicit block first, the three steps are as follows:. Predict the ukow value U + (I p).. Explicit time itegratio, for calculatig the poit U + (E).
27 Implicit time itegratio, take this step if step is secod order accurate (I c ). The (I p ) meas a predictio of the ukow value i the implicit regio, a superscript of I p idicates the discretisatio method that is used for the predictio. After the predictio a explicit Ruge Kutta step (E) ca be take. We require that the discretisatio o the iterface is secod order, so if step is secod order the step 3 ca be take. Step 3 corrects the predictio with a implicit B3 step (I c ). Usig a predictor i the explicit regio the steps are:. Predict the ukow value Ui+ + (E p).. Implicit time itegratio, for calculatig the poit Ui + (I). 3. Correct the predictor with Explicit time itegratio, take this step if step is secod order accurate (E c ). E p stads for the predictor i the explicit block. Step 3, the Ruge Kutta step is the corrector step. Step ad 3 must be secod order accurate, so step 3 ca be take whe step is secod order accurate..3. Ruge Kutta step i the implicit block (I RK p EI c ) We start with a predictor i the implicit block. The first step is a calculatio of the value at time t + with oe Ruge Kutta stage: U + = U a tu U. x The otatio of this predictio with oe Ruge Kutta stage is Ip RK. This results i the Ruge Kutta method with two stages, at each poit i the iterface of the explicit block, see equatio (5). The local trucatio error is: τ = O( t ) + O( x ). The calculatio of the poits i the iterface is the same as the calculatio of the iterior poits. We already kow that this method is secod order accurate (sectio.) After the Ruge Kutta method i the explicit block, the value U + becomes available. So the implicit B3 method ca take a step i the implicit block. The Ruge Kutta method ad the implicit B3 method are both secod order methods.
28 / implicit / t x + + explicit Fig. 0 Oe Ruge Kutta step i implicit block..3. Half implicit B3 step (I B3 p EI c) Oe implicit B3 time step results i a poit at a ew time t +. A implicit B3 time step from t to t + results i a poit at time t +. First we calculate U + with a half implicit B3 time step, from time t to t + Ruge Kutta step is secod order accurate, the a implicit time step calculates U +, the the Ruge Kutta step ca be take i the other block. If the The implicit time step from t to t + is show i figure (a), this results i U + = 4 3 U 3 U a t 6 x U+ 6 x U+. + a t. Substitute U + i the Ruge Kutta method, equatio (6) U + U t = a U U + 3 U x + a t 4 U U + 6 U+ 6 U+ x + τ. Usig equatio (3), the U +, U+, U + + ad U ca be elimiated. This results i: U + U t = a U U + 3 U x + a t 4 U U 6 U U + U x (7) a3 t 8 6 U U 6 U 3 x 3 + τ, with local trucatio error τ = O( t x ) + O( x ) + O( t x) + O( t ).
29 - 5 - Hece, usig a implicit step from t to t +, followed by a explicit step to time t + results i a method of first order accuracy. + +/ x + +/ / t / t / t x x + + implicit explicit + implicit explicit (a) Predictor (b) Explicit method Fig. Half implicit time step..3.3 Lax Wedroff i the explicit regio (E LW p IE c ) I this subsectio we take a predictor step i the explicit regio. For this predictio we use a discretisatio method, called Lax Wedroff. Lax Wedroff is a secod order method ad this method is used i the explicit regio, followed by the implicit B3 method. Lax Wedroff uses a substitutio for the secod order time derivative with respect to t ad therefore it becomes secod order. Usig Taylor series, the time derivative ca be rewritte: U + i u t = Ui + t u t + u t t + O( t3 ), Ui = U+ i t t u t + O( t ). (8) We write the secod order derivative i time as a derivative i space: u t u t = a u x, = a x u t = u a x. (9) Substitutio of equatio (9) i the time derivative, equatio (8), ad cetral discretisatio of u x results i: u t = U+ i Ui t a t Ui+ U i + Ui x.
30 - 6 - Cetral discretisatio of u x gives the scheme of Lax Wedroff U + i Ui t = a U i+ U i x + a t U i+ U i + U i x (0) U + i+ = U i+ + a t x U i a t x U i+ () + a t x U i+ a t x U i+ + a t x U i. Substitutig this approximatio of the value U + i+ i the implicit B3 scheme, equatio () gives 3U + i 4U i + U i t = a U i+ U+ i x a3 t 4 a t Ui Ui+ 4 x () U i+ U i+ + U i x 3 + τ, with τ = O( t3 x ) + O( x ) + O( t x) + O( t ). From this we ca coclude that this scheme is secod order. Lax Wedroff uses a substitutio of the secod order time derivative by meas of the differetial equatio (). This substitutio is easy to do for the wave equatio, but for the Navier-Stokes equatio it is difficult to do. + + x x i i+ i+ implicit explicit t t i i i+ implicit explicit (a) Lax Wedroff (b) Implicit B3 Fig. Lax Wedroff ad implicit B3 method
31 Liear extrapolatio ad explicit predictor (I s E pie c ) I the ext three subsectios the explicit Ruge Kutta method is used as predictor i the explicit block ad after the explicit method, the implicit B3 method is used. Before the Ruge Kutta method ca be used i the iterface a estimatio of the value at time t + i the implicit block must be made. The followig three subsectios variate this estimatio. The advatage of the explicit Ruge Kutta method as predictor is that i this way two times a explicit step is take ad oe times a implicit step. I cotrast, takig the implicit method as predictor, two times a implicit step is take ad oe times a explicit step. The implicit step is more expesive tha the explicit step, so takig the explicit method as predictor takes less time for oe time step. If the explicit Ruge Kutta method is used as predictor ad corrector, the four steps are:. Estimate U + i i the implicit regio (I s ).. With this estimatio a explicit time step ca be made, the result is Ui+ +. This is the predictor step, (E p ). 3. Implicit time itegratio (I), for calculatio of U + i. 4. Explicit time itegratio. This is the corrector step (E c ). These four steps are show i figure , 4 i implicit i+ explicit Fig. 3 Predictor corrector steps The iterface must be secod order accurate, this meas that step 3 ad 4 must be secod order. If step 3 is secod order accurate, step 4 ca be take. These four steps are used to derive the order of the predictor-corrector schemes with the explicit Ruge Kutta method as predictor. I the first step we use liear extrapolatio to estimate U + i U + i = 3 U i U i. This liear extrapolatio is used i the explicit Ruge Kutta method, see figure 4(a). Step, the
32 - 8 - predictor step ca be writte as: Ui+ + = Ui+ a t x U i+ + 3a t 4 x U i a t 4 x U i + a t 8 x U i+3 a t 8 x U i+. The value Ui+ + is calculated, so the implicit B3 method has all ecessary iformatio (see figure 4(b)). Usig this approximatio of Ui+ + i the implicit B3 scheme results i 3U + i 4U i + U i t = a U i+ U+ i x a t Ui+ + 3 U i U i 4 x (3) a3 t 6 U i+3 U i+ x 3 + τ, with τ = O( t3 x ) + O( x ) + O( t x) + O( t ). From here we ca coclude that liear extrapolatio (I s), followed by the explicit predictor step (E p ) ad a implicit step (I) has o secod order accuracy. + +/ / t / t + x t x x t i i+ i+ i+3 i i i+ implicit explicit implicit explicit (a) Predictor (b) Implicit stecil Fig. 4 Explicit method as predictor.
33 Two froze poits ad explicit predictor ((IE) 0 s E pie c ) I this subsectio, we are tryig to get a higher order method by takig two froze poit estimatios i the first step istead of oe froze poit estimatio. We take the explicit Ruge Kutta method as predictor ad corrector. Two estimatios results i a symmetry i the Ruge Kutta method. This symmetry takes care of removig the order t x of the Taylor series. So, two estimatios of the poits at time t + are give U + i = U i ad U + i+ = U i+. Substitutig these estimatios i the Ruge Kutta scheme, equatio (4), gives U + i+ = U i+ a t x U i+ + a t x U i. Figure 5(a) shows the predictor step. After the predictor step, Ui+ + substituted i the implicit B3 method (see figure 5(b)). is calculated, this ca be 3U + i 4U i + U i t = a U i+ U+ i x a t Ui Ui+ 4 x + τ, (4) with trucatio error τ = O( t x ) + O( x ) + O( t x) + O( t ). Two estimatios, oe i the explicit ad oe i the implicit regio ((IE) 0 s ), the Ruge Kutta method as predictor (E p ) ad a implicit time step (I) results i a first order discretisatio..3.6 Two liear estimatios ad explicit predictor ((IE) s E pie c ) I a similar way, we ca take two estimatios of the poits U + i ad U + i+ by liear extrapolatio. So, the two estimatios of the poits at time t + are give as U + i = 3 U i U i ad U + i+ = 3 U i+ U i+.
34 x +/ t implicit i i+ i+ explicit t i i i+ implicit explicit (a) Predictor (b) Implicit method Fig. 5 Two estimatios with Ruge Kutta as predictor. These estimatios are used i the Ruge Kutta method. Figure 6(a) shows the liear extrapolatio ad the Ruge Kutta step with substitutio of the poits U + i ad U + i+. Substitutig these estimatios i equatio (4) results i U + i+ = Ui+ 3a t U i+ U i x + a t U x i+ U i. (5) After the liear extrapolatios ad Ruge Kutta, the implicit B3 method ca take oe time step i the implicit block, see figure 6(b). Usig Ui+ + i of equatio (5) i the implicit B3 scheme results 3U + i 4U i + U i t = a U i+ U+ i x a t 3Ui+ + 3U i + Ui+ U i 8 x + τ. (6)
35 - 3 - With Taylor series the time ad space derivative ca calculated: u t = 3U+ i xi,t + u x = U i+ U+ i xi,t + x x 6 + a t 8 a t 4 x 4U i + U i t + t x + 3 t 3 u t 3, µ,ξ u t + t u xi,t + x t t xi,t + 4 x 3 u x 3 + x t 3 u µ,ξ 4 x t t 3 u µ,ξ 4 x t + t3 µ,ξ x 3Ui+ + 3U i + Ui+ U i x + a t x u t 3 u t 3 xi,t + µ,ξ u x + a t u xi,t + x xi,t + u t x a t 3 u xi,t + 4 x t a t3 3 u µ,ξ 8 x t x + a t x 3 u µ,ξ 3 x 3 µ,ξ Usig equatio () we ca write the space derivative as: u x = U i+ U+ i xi,t + x + a t 8 a t 4 x + t x u t + t u xi,t + x t t xi,t + 4 x 3Ui+ + 3U i + Ui+ U i x + a t x u t x + λ, xi,t + u t xi,t + u x + a t u xi,t + x xi,t + with λ = x 6 3 u x 3 t x 3 u µ,ξ t x + 5 t3 µ,ξ 4 x 3 u t 3 µ,ξ The local trucatio error of equatio (6) is give by τ = O( t3 x ) + O( x ) + O( t x) + O( t ). With two estimatios i the Ruge Kutta method the secod order derivative to time ad space of the Taylor series drops out. Oly higher order derivatives are left. Therefore this method is secod order if CFL is O(). This holds i the regio where implicit ad explicit are coupled.
36 x +/ t t t t i i+ i+ i i i+ implicit explicit implicit explicit (a) Predictor (b) Implicit method Fig. 6 Two estimatios by liear extrapolatio. The substitutio of the liear extrapolatio i the Ruge Kutta method is the same as the Adams Bashforth method. The Adams Bashforth method ca be writte for a iitial value problem as u t U + = f(u(t)) = U + t (3f(U ) f(u )). (7) For our model problem, equatio (7) is the same as equatio (5). Istead of liear extrapolatio substituted i the Ruge Kutta method, we speak of the Adams Bashforth method, because the Adams Bashforth method holds ot oly for our model problem..4 Ruge Kutta with four stages The iterior poits i the explicit block are explicitly itegrated with Ruge Kutta. Earlier we simplified the problem ad used Ruge Kutta with two stages, but i the explicit block Ruge Kutta with four stages should be used. Therefore we will exted the methods o the iterface to Ruge Kutta with four stages. The coefficiets for Ruge Kutta with four stages are α = 4, α = 3, α 3 = ad α 4 =, this results i the followig equatios U + U + U + 3 U + 4 = U a t = U a t = U a t x (U+ + U+ ) 4 x (U+ 3 + U+ 3 ) 6 x (U+ 4 + U+ 4 ) = U a t 8 x (U + U ).
37 These equatios ca be writte as U + U t = a U + U x + a t 8 x (U + U + U ) (8) a3 t 48 x 3(U +3 3U + + 3U U 3 ) + a4 t x 4(U +4 4U + + 6U 4U + U 4) + τ. With trucatio error τ = O( t 4 ) + O( x ) + O( t x ) + O( t x ). The scheme of this method ca be see i figure /3 +/ +/ Fig. 7 Ruge Kutta with four stages. The couplig betwee the implicit block ad the explicit block must be secod order. Oly the methods that are secod order o the iterface are exteded to Ruge Kutta with four stages. These methods are:. Oe Ruge Kutta stage o the iterface i the implicit block to calculate U +, Ruge Kutta i the explicit block ad implicit B3 after Ruge Kutta i the implicit block. The otatio for this method is I RK p EI c ad it is described i subsectio.3... Extrapolatio of the value U + i the implicit regio, followed by Ruge Kutta ad implicit B3, (Is EI). This extrapolatio is give i equatio (5), subsectio Implicit B3 with quadratic extrapolatio, followed by Ruge Kutta ca be used, (Es IE). These step are described i subsectio Adams Bashforth as predictor i the explicit block, the implicit B3 ad Ruge Kutta ((IE) se p IE c ). I subsectio.3.6 it is show that this method is secod order accurate. 5. Lax Wedroff i the explicit block, equatio (0), followed by implicit B3 ad a estimatio of the poit U +, fially Ruge Kutta, (E LW p IE c ), (subsectio.3.3).
38 The last three methods, Es IE, (IE) s E pie c ad Ep LW IE c, ca be exteded to Ruge Kutta with four stages i the same way. For these methods oly the estimatios betwee implicit ad explicit time itegratio i the implicit block must be chaged; this will be cosidered i sectio.5. The first two methods, (I RK p EI c ) ad (Is EI), will both be exteded i their ow way i the followig subsectios. The values U + 4 ad U+ are the ukow values i the implicit block, these values must be estimated. Leavig the values U + 4 ad U+ stages, the equatio becomes i Ruge Kutta with four U + U t = a U + U+ x + a t 8 x (U + U ) (9) a3 t 48 x 3(U +3 U+ + U + 4 ) + a4 t x 4(U +4 3U + + U ). Equatio (9) is used i the ext subsectios..4. Ruge Kutta step i the implicit block (I RK p EI c ) A Ruge Kutta step i the implicit block results for Ruge Kutta with two stages i a ormal Ruge Kutta process. Usig Ruge Kutta with four stages i the implicit block results also i the usual Ruge Kutta process with four stages as described previously. After the Ruge Kutta stages the implicit B3 method i the implicit regio ca be used ad the implicit B3 is secod order. For Ruge Kutta with four stages the stecil is wide, therefore we have to use may poits i the implicit regio, see figure /3 +/ +/ implicit explicit Fig. 8 Ruge Kutta four o the boudary of the explicit ad implicit regio. To calculate U + for Ruge Kutta with two stages, oe poit i the implicit block ad oe poit i the explicit block are ecessary. This Ruge Kutta step i the implicit block is easy to
39 execute. For Ruge Kutta with four stages this becomes more complicated, because to calculate the poit U + more poits i the implicit ad explicit blocks are ecessary. The stecil of Ruge Kutta with four stages is wide ad this aspect will be chaged i the ext subsectios. I these subsectios, we do ot use the poits i the implicit domai far from the iterface: x 3 ad x U + 3 froze For Ruge Kutta with two stages, oly the values at x ad x i the implicit regio are used. For Ruge Kutta with four stages we also wat to use the values at x ad x. Usig the value U istead of U+ 3 i Ruge Kutta with four stages, the values at x 3 ad x 4 are ot ecessary. I figure 9, a substitutio of U + 3 = U i Ruge Kutta four is show. + +/ +/3 +/ implicit explicit Fig. 9 Ruge Kutta four o the boudary with a estimatio of U +. The equatios are as follows: U + U + 4 = U a t 4 x (U+ 3 U ) = U a t 4 x (U U ) + a t 4 x (U + U ) a3 t 3 9 x 3(U + U + U ), = U a t 8 x (U U ).
40 Substitutig this i Ruge Kutta with four stages, equatio (9) results i U + U t = a U + U x + a t U+ U + U 8 x (30) a3 t 48 x 3(U +3 U + + U ) + a4 t x 4(U +4 3U + + 3U U ) + τ with trucatio error τ = O( t x ) + O( x ) + O( t 3 ). The discretisatio give i equatio (30) is first order..4.. Oe Ruge Kutta step for U + Tryig the make the method secod order, we take oe Ruge Kutta step to estimate the value U +. The stecil of this discretisatio is give i figure 0. For this discretisatio oly the values at x ad x i the implicit block are used. U + U + 4 = U a t 4 x (U U ), = U a t 8 x (U U ). Substitutig this estimatio i equatio (9) results i U + U t = a U + U x + a t U+ U + U 8 x (3) a3 t 48 x 3(U +3 U+ + U ) + a4 t x 4(U +4 3U + + 3U U ) + τ
41 with trucatio error τ = O( t x ) + O( x ) + O( t 3 ). This method is cosistet ad first order accurate. A first order accuracy of the poit U + substituted i the Ruge Kutta method with four stages, does ot result i a secod order accuracy. + +/ +/3 +/ implicit explicit Fig. 0 Ruge Kutta four o the boudary with a estimatio of U Extrapolatio of U + with U+ 4, U ad U For a estimatio of U + ot oly values at time t, but also values at time t ad t + ca be 4 used. I figure (a) a extrapolatio of U + with the poits U+ 4, U ad U is show. We take such extrapolatio of these poits, that Ruge Kutta with four stages becomes secod order. This extrapolatio is give i equatio (3). U + = 0 3 U U + 3 U, (3) U + 4 = U a t 8 x (U U ). Substitutig this extrapolatio i Ruge Kutta with four stages results i U + U t = a U + 3 U 3 U x + a t U+ 8 3 U U 8 x (33) a3 t 48 x 3(U +3 U+ + U ) + a4 t x 4(U +4 3U + + 3U U ) + τ,
42 with local trucatio error τ = O( t3 x ) + O( t ) + O( x ) + O( t x). This discretisatio gives a secod order method, but the coefficiets i the extrapolatio, equatio (3), caot be determied a priori. Sometimes the poit U + 3 diffusio is preset i the equatio, but the extrapolatio of the value U + 3 a priori from these equatios. is also ecessary, for example if caot be determied + + +/ +/4 t implicit explicit +/ +/3 +/ implicit explicit (a) Estimatio (b) Explicit method Fig. Ruge Kutta four with a estimatio of the poit U Extrapolatio of U + with U+ 4, U ad U + 4 For extrapolatio of U + also the value U( )+ 4 ca be used. The values U ( )+ 4 ad U + 4 are approximated usig a Ruge Kutta step. A secod order method with extrapolatio of these values ca be derived. This extrapolatio is give i equatio (34). U + = 3 U+ 4 3 U + 3 U( )+ 4 (34) U + 4 U ( )+ 4 = U a t 8 x (U U ) = U a t 8 x (U U ).
43 The substitutio of the extrapolatio i equatio (9) results i U + U t = a U + 3 U 3 U x + a t U+ 3U + U 3 U + 3 U 8 x (35) a3 t 48 x 3(U +3 U+ + U ) + a4 t x 4(U +4 3U + + 3U U ) + τ with τ = O( t3 x ) + O( t ) + O( x ) + O( t x). The stecil of this discretisatio is give i figure. This discretisatio is secod order, but also with this discretisatio it is difficult to approximate U / +/4 +/ +/3 +/ /4 implicit explicit implicit explicit (a) Estimatio (b) Explicit method Fig. Ruge Kutta four with a estimatio of the poit U Extrapolatio i the implicit block (Is EI) Extrapolatio of the poit U + as give i equatio (5) ad substituted i Ruge Kutta with two stages results i a secod order method. This should be exteded to Ruge Kutta with four stages. The poit U + has to be extrapolated such that the discretisatio is secod order accurate
44 ad U + 4 ca be calculated with oe Ruge Kutta stage. The followig extrapolatio results i a secod order discretisatio: U + = 3 U 4 3 U + 5 U, (36) U + 4 = U a t 8 x (U U ). Substitutig this i the Ruge Kutta method, equatio (9), results i U + U t = a U + 3 U U 5 U x + a t U+ U 8 x (37) a3 t 48 x 3(U +3 U + + U ) + a4 t x 4(U +4 3U + + 3U U ) + τ with trucatio error τ = O( t3 x ) + O( t ) + O( x ) + O( t x). The discretisatio give i equatio (37) results i a secod order method. With our equatio () we do ot eed U + 3, but sometimes this poit is also ecessary, for example by addig diffusio ito the equatio. I the implicit regio this poit should also be extrapolated, but U + 3 to derive from Taylor series..5 Couplig implicit with secod order accuracy with Ruge Kutta.5. Ruge Kutta with two stages is difficult I sectio. ad.3 a couple of discretisatios are secod order accurate, for example Ep LW IE c, EsIE ad (IE) se p IE c. Ep LW IE c, estimates the value Ui+ + i the explicit block with Lax Wedroff ad the a implicit B3 step calculates Ui +. The value Ui + is secod order accurate. I the implicit block the values at time t + ad t are kow. The Ruge Kutta method with two stages i the explicit block eeds the value U + of the implicit block, see figure 3(b). This value U + should be estimated such that Ruge Kutta is still a secod order method. I this subsectio we cosider the accuracy of the value at (x,t + ) with several iterpolatios.
Taylor expansion: Show that the TE of f(x)= sin(x) around. sin(x) = x - + 3! 5! L 7 & 8: MHD/ZAH
= sin(x) around. sin(x) = x - + 3! 5! L 7 & 8: MHD/ZAH") Taylor epasio: Let ƒ() be a ifiitely differetiable real fuctio. A ay poit i the eighbourhood of 0, the fuctio ƒ() ca be represeted by a power series of the followig form: X 0 f(a) f() f() ( ) f( ) ( )
Taylor epasio: Let ƒ() be a ifiitely differetiable real fuctio. A ay poit i the eighbourhood of 0, the fuctio ƒ() ca be represeted by a power series of the followig form: X 0 f(a) f() f() ( ) f( ) ( )
Math 257: Finite difference methods
 Math 257: Fiite differece methods 1 Fiite Differeces Remember the defiitio of a derivative f f(x + ) f(x) (x) = lim 0 Also recall Taylor s formula: (1) f(x + ) = f(x) + f (x) + 2 f (x) + 3 f (3) (x) +...
Math 257: Fiite differece methods 1 Fiite Differeces Remember the defiitio of a derivative f f(x + ) f(x) (x) = lim 0 Also recall Taylor s formula: (1) f(x + ) = f(x) + f (x) + 2 f (x) + 3 f (3) (x) +...
L 5 & 6: RelHydro/Basel. f(x)= ( ) f( ) ( ) ( ) ( ) n! 1! 2! 3! If the TE of f(x)= sin(x) around x 0 is: sin(x) = x - 3! 5!
= ( ) f( ) ( ) ( ) ( ) n! 1! 2! 3! If the TE of f(x)= sin(x) around x 0 is: sin(x) = x - 3! 5!") aylor epasio: Let ƒ() be a ifiitely differetiable real fuctio. At ay poit i the eighbourhood of =0, the fuctio ca be represeted as a power series of the followig form: X 0 f(a) f() ƒ() f()= ( ) f( ) (
aylor epasio: Let ƒ() be a ifiitely differetiable real fuctio. At ay poit i the eighbourhood of =0, the fuctio ca be represeted as a power series of the followig form: X 0 f(a) f() ƒ() f()= ( ) f( ) (
Lecture 8: Solving the Heat, Laplace and Wave equations using finite difference methods
 Itroductory lecture otes o Partial Differetial Equatios - c Athoy Peirce. Not to be copied, used, or revised without explicit writte permissio from the copyright ower. 1 Lecture 8: Solvig the Heat, Laplace
Itroductory lecture otes o Partial Differetial Equatios - c Athoy Peirce. Not to be copied, used, or revised without explicit writte permissio from the copyright ower. 1 Lecture 8: Solvig the Heat, Laplace
Numerical Methods for Ordinary Differential Equations
 Numerical Methods for Ordiary Differetial Equatios Braislav K. Nikolić Departmet of Physics ad Astroomy, Uiversity of Delaware, U.S.A. PHYS 460/660: Computatioal Methods of Physics http://www.physics.udel.edu/~bikolic/teachig/phys660/phys660.html
Numerical Methods for Ordiary Differetial Equatios Braislav K. Nikolić Departmet of Physics ad Astroomy, Uiversity of Delaware, U.S.A. PHYS 460/660: Computatioal Methods of Physics http://www.physics.udel.edu/~bikolic/teachig/phys660/phys660.html
Chapter 10: Power Series
 Chapter : Power Series 57 Chapter Overview: Power Series The reaso series are part of a Calculus course is that there are fuctios which caot be itegrated. All power series, though, ca be itegrated because
Chapter : Power Series 57 Chapter Overview: Power Series The reaso series are part of a Calculus course is that there are fuctios which caot be itegrated. All power series, though, ca be itegrated because
TMA4205 Numerical Linear Algebra. The Poisson problem in R 2 : diagonalization methods
 TMA4205 Numerical Liear Algebra The Poisso problem i R 2 : diagoalizatio methods September 3, 2007 c Eiar M Røquist Departmet of Mathematical Scieces NTNU, N-749 Trodheim, Norway All rights reserved A
TMA4205 Numerical Liear Algebra The Poisso problem i R 2 : diagoalizatio methods September 3, 2007 c Eiar M Røquist Departmet of Mathematical Scieces NTNU, N-749 Trodheim, Norway All rights reserved A
Streamfunction-Vorticity Formulation
 Streamfuctio-Vorticity Formulatio A. Salih Departmet of Aerospace Egieerig Idia Istitute of Space Sciece ad Techology, Thiruvaathapuram March 2013 The streamfuctio-vorticity formulatio was amog the first
Streamfuctio-Vorticity Formulatio A. Salih Departmet of Aerospace Egieerig Idia Istitute of Space Sciece ad Techology, Thiruvaathapuram March 2013 The streamfuctio-vorticity formulatio was amog the first
Chapter 2: Numerical Methods
 Chapter : Numerical Methods. Some Numerical Methods for st Order ODEs I this sectio, a summar of essetial features of umerical methods related to solutios of ordiar differetial equatios is give. I geeral,
Chapter : Numerical Methods. Some Numerical Methods for st Order ODEs I this sectio, a summar of essetial features of umerical methods related to solutios of ordiar differetial equatios is give. I geeral,
f(x) dx as we do. 2x dx x also diverges. Solution: We compute 2x dx lim
 dx as we do. 2x dx x also diverges. Solution: We compute 2x dx lim") Math 3, Sectio 2. (25 poits) Why we defie f(x) dx as we do. (a) Show that the improper itegral diverges. Hece the improper itegral x 2 + x 2 + b also diverges. Solutio: We compute x 2 + = lim b x 2 + =
Math 3, Sectio 2. (25 poits) Why we defie f(x) dx as we do. (a) Show that the improper itegral diverges. Hece the improper itegral x 2 + x 2 + b also diverges. Solutio: We compute x 2 + = lim b x 2 + =
ME 501A Seminar in Engineering Analysis Page 1
 Accurac, Stabilit ad Sstems of Equatios November 0, 07 Numerical Solutios of Ordiar Differetial Equatios Accurac, Stabilit ad Sstems of Equatios Larr Caretto Mecaical Egieerig 0AB Semiar i Egieerig Aalsis
Accurac, Stabilit ad Sstems of Equatios November 0, 07 Numerical Solutios of Ordiar Differetial Equatios Accurac, Stabilit ad Sstems of Equatios Larr Caretto Mecaical Egieerig 0AB Semiar i Egieerig Aalsis
ECE-S352 Introduction to Digital Signal Processing Lecture 3A Direct Solution of Difference Equations
 ECE-S352 Itroductio to Digital Sigal Processig Lecture 3A Direct Solutio of Differece Equatios Discrete Time Systems Described by Differece Equatios Uit impulse (sample) respose h() of a DT system allows
ECE-S352 Itroductio to Digital Sigal Processig Lecture 3A Direct Solutio of Differece Equatios Discrete Time Systems Described by Differece Equatios Uit impulse (sample) respose h() of a DT system allows
CO-LOCATED DIFFUSE APPROXIMATION METHOD FOR TWO DIMENSIONAL INCOMPRESSIBLE CHANNEL FLOWS
 CO-LOCATED DIFFUSE APPROXIMATION METHOD FOR TWO DIMENSIONAL INCOMPRESSIBLE CHANNEL FLOWS C.PRAX ad H.SADAT Laboratoire d'etudes Thermiques,URA CNRS 403 40, Aveue du Recteur Pieau 86022 Poitiers Cedex,
CO-LOCATED DIFFUSE APPROXIMATION METHOD FOR TWO DIMENSIONAL INCOMPRESSIBLE CHANNEL FLOWS C.PRAX ad H.SADAT Laboratoire d'etudes Thermiques,URA CNRS 403 40, Aveue du Recteur Pieau 86022 Poitiers Cedex,
Chapter 4. Fourier Series
 Chapter 4. Fourier Series At this poit we are ready to ow cosider the caoical equatios. Cosider, for eample the heat equatio u t = u, < (4.) subject to u(, ) = si, u(, t) = u(, t) =. (4.) Here,
Chapter 4. Fourier Series At this poit we are ready to ow cosider the caoical equatios. Cosider, for eample the heat equatio u t = u, < (4.) subject to u(, ) = si, u(, t) = u(, t) =. (4.) Here,
10-701/ Machine Learning Mid-term Exam Solution
 0-70/5-78 Machie Learig Mid-term Exam Solutio Your Name: Your Adrew ID: True or False (Give oe setece explaatio) (20%). (F) For a cotiuous radom variable x ad its probability distributio fuctio p(x), it
0-70/5-78 Machie Learig Mid-term Exam Solutio Your Name: Your Adrew ID: True or False (Give oe setece explaatio) (20%). (F) For a cotiuous radom variable x ad its probability distributio fuctio p(x), it
6.3 Testing Series With Positive Terms
 6.3. TESTING SERIES WITH POSITIVE TERMS 307 6.3 Testig Series With Positive Terms 6.3. Review of what is kow up to ow I theory, testig a series a i for covergece amouts to fidig the i= sequece of partial
6.3. TESTING SERIES WITH POSITIVE TERMS 307 6.3 Testig Series With Positive Terms 6.3. Review of what is kow up to ow I theory, testig a series a i for covergece amouts to fidig the i= sequece of partial
Math 113 Exam 3 Practice
 Math Exam Practice Exam 4 will cover.-., 0. ad 0.. Note that eve though. was tested i exam, questios from that sectios may also be o this exam. For practice problems o., refer to the last review. This
Math Exam Practice Exam 4 will cover.-., 0. ad 0.. Note that eve though. was tested i exam, questios from that sectios may also be o this exam. For practice problems o., refer to the last review. This
THE NUMERICAL SOLUTION OF THE NEWTONIAN FLUIDS FLOW DUE TO A STRETCHING CYLINDER BY SOR ITERATIVE PROCEDURE ABSTRACT
 Europea Joural of Egieerig ad Techology Vol. 3 No., 5 ISSN 56-586 THE NUMERICAL SOLUTION OF THE NEWTONIAN FLUIDS FLOW DUE TO A STRETCHING CYLINDER BY SOR ITERATIVE PROCEDURE Atif Nazir, Tahir Mahmood ad
Europea Joural of Egieerig ad Techology Vol. 3 No., 5 ISSN 56-586 THE NUMERICAL SOLUTION OF THE NEWTONIAN FLUIDS FLOW DUE TO A STRETCHING CYLINDER BY SOR ITERATIVE PROCEDURE Atif Nazir, Tahir Mahmood ad
Comparison Study of Series Approximation. and Convergence between Chebyshev. and Legendre Series
 Applied Mathematical Scieces, Vol. 7, 03, o. 6, 3-337 HIKARI Ltd, www.m-hikari.com http://d.doi.org/0.988/ams.03.3430 Compariso Study of Series Approimatio ad Covergece betwee Chebyshev ad Legedre Series
Applied Mathematical Scieces, Vol. 7, 03, o. 6, 3-337 HIKARI Ltd, www.m-hikari.com http://d.doi.org/0.988/ams.03.3430 Compariso Study of Series Approimatio ad Covergece betwee Chebyshev ad Legedre Series
Goal. Adaptive Finite Element Methods for Non-Stationary Convection-Diffusion Problems. Outline. Differential Equation
 Goal Adaptive Fiite Elemet Methods for No-Statioary Covectio-Diffusio Problems R. Verfürth Ruhr-Uiversität Bochum www.ruhr-ui-bochum.de/um1 Tübige / July 0th, 017 Preset space-time adaptive fiite elemet
Goal Adaptive Fiite Elemet Methods for No-Statioary Covectio-Diffusio Problems R. Verfürth Ruhr-Uiversität Bochum www.ruhr-ui-bochum.de/um1 Tübige / July 0th, 017 Preset space-time adaptive fiite elemet
Most text will write ordinary derivatives using either Leibniz notation 2 3. y + 5y= e and y y. xx tt t
 Itroductio to Differetial Equatios Defiitios ad Termiolog Differetial Equatio: A equatio cotaiig the derivatives of oe or more depedet variables, with respect to oe or more idepedet variables, is said
Itroductio to Differetial Equatios Defiitios ad Termiolog Differetial Equatio: A equatio cotaiig the derivatives of oe or more depedet variables, with respect to oe or more idepedet variables, is said
x x x 2x x N ( ) p NUMERICAL METHODS UNIT-I-SOLUTION OF EQUATIONS AND EIGENVALUE PROBLEMS By Newton-Raphson formula
 p NUMERICAL METHODS UNIT-I-SOLUTION OF EQUATIONS AND EIGENVALUE PROBLEMS By Newton-Raphson formula") NUMERICAL METHODS UNIT-I-SOLUTION OF EQUATIONS AND EIGENVALUE PROBLEMS. If g( is cotiuous i [a,b], te uder wat coditio te iterative (or iteratio metod = g( as a uique solutio i [a,b]? '( i [a,b].. Wat
NUMERICAL METHODS UNIT-I-SOLUTION OF EQUATIONS AND EIGENVALUE PROBLEMS. If g( is cotiuous i [a,b], te uder wat coditio te iterative (or iteratio metod = g( as a uique solutio i [a,b]? '( i [a,b].. Wat
The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j
![The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j](/thumbs/82/85448534.jpg "The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j") The -Trasform 7. Itroductio Geeralie the complex siusoidal represetatio offered by DTFT to a represetatio of complex expoetial sigals. Obtai more geeral characteristics for discrete-time LTI systems. 7.
The -Trasform 7. Itroductio Geeralie the complex siusoidal represetatio offered by DTFT to a represetatio of complex expoetial sigals. Obtai more geeral characteristics for discrete-time LTI systems. 7.
1 Approximating Integrals using Taylor Polynomials
 Seughee Ye Ma 8: Week 7 Nov Week 7 Summary This week, we will lear how we ca approximate itegrals usig Taylor series ad umerical methods. Topics Page Approximatig Itegrals usig Taylor Polyomials. Defiitios................................................
Seughee Ye Ma 8: Week 7 Nov Week 7 Summary This week, we will lear how we ca approximate itegrals usig Taylor series ad umerical methods. Topics Page Approximatig Itegrals usig Taylor Polyomials. Defiitios................................................
Finite Difference Derivations for Spreadsheet Modeling John C. Walton Modified: November 15, 2007 jcw
 Fiite Differece Derivatios for Spreadsheet Modelig Joh C. Walto Modified: November 15, 2007 jcw Figure 1. Suset with 11 swas o Little Platte Lake, Michiga. Page 1 Modificatio Date: November 15, 2007 Review
Fiite Differece Derivatios for Spreadsheet Modelig Joh C. Walto Modified: November 15, 2007 jcw Figure 1. Suset with 11 swas o Little Platte Lake, Michiga. Page 1 Modificatio Date: November 15, 2007 Review
New Version of the Rayleigh Schrödinger Perturbation Theory: Examples
 New Versio of the Rayleigh Schrödiger Perturbatio Theory: Examples MILOŠ KALHOUS, 1 L. SKÁLA, 1 J. ZAMASTIL, 1 J. ČÍŽEK 2 1 Charles Uiversity, Faculty of Mathematics Physics, Ke Karlovu 3, 12116 Prague
New Versio of the Rayleigh Schrödiger Perturbatio Theory: Examples MILOŠ KALHOUS, 1 L. SKÁLA, 1 J. ZAMASTIL, 1 J. ČÍŽEK 2 1 Charles Uiversity, Faculty of Mathematics Physics, Ke Karlovu 3, 12116 Prague
Section A assesses the Units Numerical Analysis 1 and 2 Section B assesses the Unit Mathematics for Applied Mathematics
 X0/70 NATIONAL QUALIFICATIONS 005 MONDAY, MAY.00 PM 4.00 PM APPLIED MATHEMATICS ADVANCED HIGHER Numerical Aalysis Read carefully. Calculators may be used i this paper.. Cadidates should aswer all questios.
X0/70 NATIONAL QUALIFICATIONS 005 MONDAY, MAY.00 PM 4.00 PM APPLIED MATHEMATICS ADVANCED HIGHER Numerical Aalysis Read carefully. Calculators may be used i this paper.. Cadidates should aswer all questios.
Computational Fluid Dynamics. Lecture 5
 Time differecig cotiued. Three level schemes. B. Modified L-F schemes. C. Higher order methods. Three level schemes Computatioal Fluid Dyamics Lecture 5 ψ = α α β tf β cosistet schemes if α α = ad β β
Time differecig cotiued. Three level schemes. B. Modified L-F schemes. C. Higher order methods. Three level schemes Computatioal Fluid Dyamics Lecture 5 ψ = α α β tf β cosistet schemes if α α = ad β β
Math 113, Calculus II Winter 2007 Final Exam Solutions
 Math, Calculus II Witer 7 Fial Exam Solutios (5 poits) Use the limit defiitio of the defiite itegral ad the sum formulas to compute x x + dx The check your aswer usig the Evaluatio Theorem Solutio: I this
Math, Calculus II Witer 7 Fial Exam Solutios (5 poits) Use the limit defiitio of the defiite itegral ad the sum formulas to compute x x + dx The check your aswer usig the Evaluatio Theorem Solutio: I this
FIR Filter Design: Part II
 EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we cosider how we might go about desigig FIR filters with arbitrary frequecy resposes, through compositio of multiple sigle-peak
EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we cosider how we might go about desigig FIR filters with arbitrary frequecy resposes, through compositio of multiple sigle-peak
Introduction to Signals and Systems, Part V: Lecture Summary
 EEL33: Discrete-Time Sigals ad Systems Itroductio to Sigals ad Systems, Part V: Lecture Summary Itroductio to Sigals ad Systems, Part V: Lecture Summary So far we have oly looked at examples of o-recursive
EEL33: Discrete-Time Sigals ad Systems Itroductio to Sigals ad Systems, Part V: Lecture Summary Itroductio to Sigals ad Systems, Part V: Lecture Summary So far we have oly looked at examples of o-recursive
NUMERICAL METHODS COURSEWORK INFORMAL NOTES ON NUMERICAL INTEGRATION COURSEWORK
 NUMERICAL METHODS COURSEWORK INFORMAL NOTES ON NUMERICAL INTEGRATION COURSEWORK For this piece of coursework studets must use the methods for umerical itegratio they meet i the Numerical Methods module
NUMERICAL METHODS COURSEWORK INFORMAL NOTES ON NUMERICAL INTEGRATION COURSEWORK For this piece of coursework studets must use the methods for umerical itegratio they meet i the Numerical Methods module
U8L1: Sec Equations of Lines in R 2
 MCVU U8L: Sec. 8.9. Equatios of Lies i R Review of Equatios of a Straight Lie (-D) Cosider the lie passig through A (-,) with slope, as show i the diagram below. I poit slope form, the equatio of the lie
MCVU U8L: Sec. 8.9. Equatios of Lies i R Review of Equatios of a Straight Lie (-D) Cosider the lie passig through A (-,) with slope, as show i the diagram below. I poit slope form, the equatio of the lie
Explicit Group Methods in the Solution of the 2-D Convection-Diffusion Equations
 Proceedigs of the World Cogress o Egieerig 00 Vol III WCE 00 Jue 0 - July 00 Lodo U.K. Explicit Group Methods i the Solutio of the -D Covectio-Diffusio Equatios a Kah Bee orhashidah Hj. M. Ali ad Choi-Hog
Proceedigs of the World Cogress o Egieerig 00 Vol III WCE 00 Jue 0 - July 00 Lodo U.K. Explicit Group Methods i the Solutio of the -D Covectio-Diffusio Equatios a Kah Bee orhashidah Hj. M. Ali ad Choi-Hog
62. Power series Definition 16. (Power series) Given a sequence {c n }, the series. c n x n = c 0 + c 1 x + c 2 x 2 + c 3 x 3 +
 Given a sequence {c n }, the series. c n x n = c 0 + c 1 x + c 2 x 2 + c 3 x 3 +") 62. Power series Defiitio 16. (Power series) Give a sequece {c }, the series c x = c 0 + c 1 x + c 2 x 2 + c 3 x 3 + is called a power series i the variable x. The umbers c are called the coefficiets of
62. Power series Defiitio 16. (Power series) Give a sequece {c }, the series c x = c 0 + c 1 x + c 2 x 2 + c 3 x 3 + is called a power series i the variable x. The umbers c are called the coefficiets of
Lecture 2: Finite Difference Methods in Heat Transfer
 Lecture 2: Fiite Differece Methods i Heat Trasfer V.Vuorie Aalto Uiversity School of Egieerig Heat ad Mass Trasfer Course, Autum 2016 November 1 st 2017, Otaiemi ville.vuorie@aalto.fi Overview Part 1 (
Lecture 2: Fiite Differece Methods i Heat Trasfer V.Vuorie Aalto Uiversity School of Egieerig Heat ad Mass Trasfer Course, Autum 2016 November 1 st 2017, Otaiemi ville.vuorie@aalto.fi Overview Part 1 (
Boundary Element Method (BEM)
") Boudary Elemet Method BEM Zora Ilievski Wedesday 8 th Jue 006 HG 6.96 TU/e Talk Overview The idea of BEM ad its advatages The D potetial problem Numerical implemetatio Idea of BEM 3 Idea of BEM 4 Advatages
Boudary Elemet Method BEM Zora Ilievski Wedesday 8 th Jue 006 HG 6.96 TU/e Talk Overview The idea of BEM ad its advatages The D potetial problem Numerical implemetatio Idea of BEM 3 Idea of BEM 4 Advatages
The Method of Least Squares. To understand least squares fitting of data.
 The Method of Least Squares KEY WORDS Curve fittig, least square GOAL To uderstad least squares fittig of data To uderstad the least squares solutio of icosistet systems of liear equatios 1 Motivatio Curve
The Method of Least Squares KEY WORDS Curve fittig, least square GOAL To uderstad least squares fittig of data To uderstad the least squares solutio of icosistet systems of liear equatios 1 Motivatio Curve
AE/ME 339 Computational Fluid Dynamics (CFD)
") AE/ME 339 Computatioal Fluid Dyamics (CFD 0//004 Topic0_PresCorr_ Computatioal Fluid Dyamics (AE/ME 339 Pressure Correctio Method The pressure correctio formula (6.8.4 Calculatio of p. Coservatio form
AE/ME 339 Computatioal Fluid Dyamics (CFD 0//004 Topic0_PresCorr_ Computatioal Fluid Dyamics (AE/ME 339 Pressure Correctio Method The pressure correctio formula (6.8.4 Calculatio of p. Coservatio form
A NEW CLASS OF 2-STEP RATIONAL MULTISTEP METHODS
 Jural Karya Asli Loreka Ahli Matematik Vol. No. (010) page 6-9. Jural Karya Asli Loreka Ahli Matematik A NEW CLASS OF -STEP RATIONAL MULTISTEP METHODS 1 Nazeeruddi Yaacob Teh Yua Yig Norma Alias 1 Departmet
Jural Karya Asli Loreka Ahli Matematik Vol. No. (010) page 6-9. Jural Karya Asli Loreka Ahli Matematik A NEW CLASS OF -STEP RATIONAL MULTISTEP METHODS 1 Nazeeruddi Yaacob Teh Yua Yig Norma Alias 1 Departmet
A Pseudo Spline Methods for Solving an Initial Value Problem of Ordinary Differential Equation
 Joural of Matematics ad Statistics 4 (: 7-, 008 ISSN 549-3644 008 Sciece Publicatios A Pseudo Splie Metods for Solvig a Iitial Value Problem of Ordiary Differetial Equatio B.S. Ogudare ad G.E. Okeca Departmet
Joural of Matematics ad Statistics 4 (: 7-, 008 ISSN 549-3644 008 Sciece Publicatios A Pseudo Splie Metods for Solvig a Iitial Value Problem of Ordiary Differetial Equatio B.S. Ogudare ad G.E. Okeca Departmet
Mathematical Modeling of Optimum 3 Step Stress Accelerated Life Testing for Generalized Pareto Distribution
 America Joural of Theoretical ad Applied Statistics 05; 4(: 6-69 Published olie May 8, 05 (http://www.sciecepublishiggroup.com/j/ajtas doi: 0.648/j.ajtas.05040. ISSN: 6-8999 (Prit; ISSN: 6-9006 (Olie Mathematical
America Joural of Theoretical ad Applied Statistics 05; 4(: 6-69 Published olie May 8, 05 (http://www.sciecepublishiggroup.com/j/ajtas doi: 0.648/j.ajtas.05040. ISSN: 6-8999 (Prit; ISSN: 6-9006 (Olie Mathematical
Similarity Solutions to Unsteady Pseudoplastic. Flow Near a Moving Wall
 Iteratioal Mathematical Forum, Vol. 9, 04, o. 3, 465-475 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/0.988/imf.04.48 Similarity Solutios to Usteady Pseudoplastic Flow Near a Movig Wall W. Robi Egieerig
Iteratioal Mathematical Forum, Vol. 9, 04, o. 3, 465-475 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/0.988/imf.04.48 Similarity Solutios to Usteady Pseudoplastic Flow Near a Movig Wall W. Robi Egieerig
1. Linearization of a nonlinear system given in the form of a system of ordinary differential equations
 . Liearizatio of a oliear system give i the form of a system of ordiary differetial equatios We ow show how to determie a liear model which approximates the behavior of a time-ivariat oliear system i a
. Liearizatio of a oliear system give i the form of a system of ordiary differetial equatios We ow show how to determie a liear model which approximates the behavior of a time-ivariat oliear system i a
INFINITE SEQUENCES AND SERIES
 11 INFINITE SEQUENCES AND SERIES INFINITE SEQUENCES AND SERIES 11.4 The Compariso Tests I this sectio, we will lear: How to fid the value of a series by comparig it with a kow series. COMPARISON TESTS
11 INFINITE SEQUENCES AND SERIES INFINITE SEQUENCES AND SERIES 11.4 The Compariso Tests I this sectio, we will lear: How to fid the value of a series by comparig it with a kow series. COMPARISON TESTS
Random Variables, Sampling and Estimation
 Chapter 1 Radom Variables, Samplig ad Estimatio 1.1 Itroductio This chapter will cover the most importat basic statistical theory you eed i order to uderstad the ecoometric material that will be comig
Chapter 1 Radom Variables, Samplig ad Estimatio 1.1 Itroductio This chapter will cover the most importat basic statistical theory you eed i order to uderstad the ecoometric material that will be comig
1 6 = 1 6 = + Factorials and Euler s Gamma function
 Royal Holloway Uiversity of Lodo Departmet of Physics Factorials ad Euler s Gamma fuctio Itroductio The is a self-cotaied part of the course dealig, essetially, with the factorial fuctio ad its geeralizatio
Royal Holloway Uiversity of Lodo Departmet of Physics Factorials ad Euler s Gamma fuctio Itroductio The is a self-cotaied part of the course dealig, essetially, with the factorial fuctio ad its geeralizatio
MIDTERM 3 CALCULUS 2. Monday, December 3, :15 PM to 6:45 PM. Name PRACTICE EXAM SOLUTIONS
 MIDTERM 3 CALCULUS MATH 300 FALL 08 Moday, December 3, 08 5:5 PM to 6:45 PM Name PRACTICE EXAM S Please aswer all of the questios, ad show your work. You must explai your aswers to get credit. You will
MIDTERM 3 CALCULUS MATH 300 FALL 08 Moday, December 3, 08 5:5 PM to 6:45 PM Name PRACTICE EXAM S Please aswer all of the questios, ad show your work. You must explai your aswers to get credit. You will
Fourier Series and the Wave Equation
 Fourier Series ad the Wave Equatio We start with the oe-dimesioal wave equatio u u =, x u(, t) = u(, t) =, ux (,) = f( x), u ( x,) = This represets a vibratig strig, where u is the displacemet of the strig
Fourier Series ad the Wave Equatio We start with the oe-dimesioal wave equatio u u =, x u(, t) = u(, t) =, ux (,) = f( x), u ( x,) = This represets a vibratig strig, where u is the displacemet of the strig
Monte Carlo Optimization to Solve a Two-Dimensional Inverse Heat Conduction Problem
 Australia Joural of Basic Applied Scieces, 5(): 097-05, 0 ISSN 99-878 Mote Carlo Optimizatio to Solve a Two-Dimesioal Iverse Heat Coductio Problem M Ebrahimi Departmet of Mathematics, Karaj Brach, Islamic
Australia Joural of Basic Applied Scieces, 5(): 097-05, 0 ISSN 99-878 Mote Carlo Optimizatio to Solve a Two-Dimesioal Iverse Heat Coductio Problem M Ebrahimi Departmet of Mathematics, Karaj Brach, Islamic
1 1 2 = show that: over variables x and y. [2 marks] Write down necessary conditions involving first and second-order partial derivatives for ( x0, y
![1 1 2 = show that: over variables x and y. [2 marks] Write down necessary conditions involving first and second-order partial derivatives for ( x0, y](/thumbs/95/125864248.jpg "1 1 2 = show that: over variables x and y. [2 marks] Write down necessary conditions involving first and second-order partial derivatives for ( x0, y") Questio (a) A square matrix A= A is called positive defiite if the quadratic form waw > 0 for every o-zero vector w [Note: Here (.) deotes the traspose of a matrix or a vector]. Let 0 A = 0 = show that:
Questio (a) A square matrix A= A is called positive defiite if the quadratic form waw > 0 for every o-zero vector w [Note: Here (.) deotes the traspose of a matrix or a vector]. Let 0 A = 0 = show that:
Infinite Sequences and Series
 Chapter 6 Ifiite Sequeces ad Series 6.1 Ifiite Sequeces 6.1.1 Elemetary Cocepts Simply speakig, a sequece is a ordered list of umbers writte: {a 1, a 2, a 3,...a, a +1,...} where the elemets a i represet
Chapter 6 Ifiite Sequeces ad Series 6.1 Ifiite Sequeces 6.1.1 Elemetary Cocepts Simply speakig, a sequece is a ordered list of umbers writte: {a 1, a 2, a 3,...a, a +1,...} where the elemets a i represet
Problem Cosider the curve give parametrically as x = si t ad y = + cos t for» t» ß: (a) Describe the path this traverses: Where does it start (whe t =
 Describe the path this traverses: Where does it start (whe t =") Mathematics Summer Wilso Fial Exam August 8, ANSWERS Problem 1 (a) Fid the solutio to y +x y = e x x that satisfies y() = 5 : This is already i the form we used for a first order liear differetial equatio,
Mathematics Summer Wilso Fial Exam August 8, ANSWERS Problem 1 (a) Fid the solutio to y +x y = e x x that satisfies y() = 5 : This is already i the form we used for a first order liear differetial equatio,
The axial dispersion model for tubular reactors at steady state can be described by the following equations: dc dz R n cn = 0 (1) (2) 1 d 2 c.
 (2) 1 d 2 c.") 5.4 Applicatio of Perturbatio Methods to the Dispersio Model for Tubular Reactors The axial dispersio model for tubular reactors at steady state ca be described by the followig equatios: d c Pe dz z =
5.4 Applicatio of Perturbatio Methods to the Dispersio Model for Tubular Reactors The axial dispersio model for tubular reactors at steady state ca be described by the followig equatios: d c Pe dz z =
Journal of Computational Physics 149, (1999) Article ID jcph , available online at
 Article ID jcph , available online at") Joural of Computatioal Physics 149, 418 422 (1999) Article ID jcph.1998.6131, available olie at http://www.idealibrary.com o NOTE Defiig Wave Amplitude i Characteristic Boudary Coditios Key Words: Euler
Joural of Computatioal Physics 149, 418 422 (1999) Article ID jcph.1998.6131, available olie at http://www.idealibrary.com o NOTE Defiig Wave Amplitude i Characteristic Boudary Coditios Key Words: Euler
Free Surface Hydrodynamics
 Water Sciece ad Egieerig Free Surface Hydrodyamics y A part of Module : Hydraulics ad Hydrology Water Sciece ad Egieerig Dr. Shreedhar Maskey Seior Lecturer UNESCO-IHE Istitute for Water Educatio S. Maskey
Water Sciece ad Egieerig Free Surface Hydrodyamics y A part of Module : Hydraulics ad Hydrology Water Sciece ad Egieerig Dr. Shreedhar Maskey Seior Lecturer UNESCO-IHE Istitute for Water Educatio S. Maskey
Numerical Conformal Mapping via a Fredholm Integral Equation using Fourier Method ABSTRACT INTRODUCTION
 alaysia Joural of athematical Scieces 3(1): 83-93 (9) umerical Coformal appig via a Fredholm Itegral Equatio usig Fourier ethod 1 Ali Hassa ohamed urid ad Teh Yua Yig 1, Departmet of athematics, Faculty
alaysia Joural of athematical Scieces 3(1): 83-93 (9) umerical Coformal appig via a Fredholm Itegral Equatio usig Fourier ethod 1 Ali Hassa ohamed urid ad Teh Yua Yig 1, Departmet of athematics, Faculty
A collocation method for singular integral equations with cosecant kernel via Semi-trigonometric interpolation
 Iteratioal Joural of Mathematics Research. ISSN 0976-5840 Volume 9 Number 1 (017) pp. 45-51 Iteratioal Research Publicatio House http://www.irphouse.com A collocatio method for sigular itegral equatios
Iteratioal Joural of Mathematics Research. ISSN 0976-5840 Volume 9 Number 1 (017) pp. 45-51 Iteratioal Research Publicatio House http://www.irphouse.com A collocatio method for sigular itegral equatios
Kinetics of Complex Reactions
 Kietics of Complex Reactios by Flick Colema Departmet of Chemistry Wellesley College Wellesley MA 28 wcolema@wellesley.edu Copyright Flick Colema 996. All rights reserved. You are welcome to use this documet
Kietics of Complex Reactios by Flick Colema Departmet of Chemistry Wellesley College Wellesley MA 28 wcolema@wellesley.edu Copyright Flick Colema 996. All rights reserved. You are welcome to use this documet
Linear Regression Demystified
 Liear Regressio Demystified Liear regressio is a importat subject i statistics. I elemetary statistics courses, formulae related to liear regressio are ofte stated without derivatio. This ote iteds to
Liear Regressio Demystified Liear regressio is a importat subject i statistics. I elemetary statistics courses, formulae related to liear regressio are ofte stated without derivatio. This ote iteds to
Math 5311 Problem Set #5 Solutions
 Math 5311 Problem Set #5 Solutios March 9, 009 Problem 1 O&S 11.1.3 Part (a) Solve with boudary coditios u = 1 0 x < L/ 1 L/ < x L u (0) = u (L) = 0. Let s refer to [0, L/) as regio 1 ad (L/, L] as regio.
Math 5311 Problem Set #5 Solutios March 9, 009 Problem 1 O&S 11.1.3 Part (a) Solve with boudary coditios u = 1 0 x < L/ 1 L/ < x L u (0) = u (L) = 0. Let s refer to [0, L/) as regio 1 ad (L/, L] as regio.
*X203/701* X203/701. APPLIED MATHEMATICS ADVANCED HIGHER Numerical Analysis. Read carefully
 X0/70 NATIONAL QUALIFICATIONS 006 MONDAY, MAY.00 PM.00 PM APPLIED MATHEMATICS ADVANCED HIGHER Numerical Aalysis Read carefully. Calculators may be used i this paper.. Cadidates should aswer all questios.
X0/70 NATIONAL QUALIFICATIONS 006 MONDAY, MAY.00 PM.00 PM APPLIED MATHEMATICS ADVANCED HIGHER Numerical Aalysis Read carefully. Calculators may be used i this paper.. Cadidates should aswer all questios.
Salmon: Lectures on partial differential equations. 3. First-order linear equations as the limiting case of second-order equations
 3. First-order liear equatios as the limitig case of secod-order equatios We cosider the advectio-diffusio equatio (1) v = 2 o a bouded domai, with boudary coditios of prescribed. The coefficiets ( ) (2)
3. First-order liear equatios as the limitig case of secod-order equatios We cosider the advectio-diffusio equatio (1) v = 2 o a bouded domai, with boudary coditios of prescribed. The coefficiets ( ) (2)
SECTION 2 Electrostatics
 SECTION Electrostatics This sectio, based o Chapter of Griffiths, covers effects of electric fields ad forces i static (timeidepedet) situatios. The topics are: Electric field Gauss s Law Electric potetial
SECTION Electrostatics This sectio, based o Chapter of Griffiths, covers effects of electric fields ad forces i static (timeidepedet) situatios. The topics are: Electric field Gauss s Law Electric potetial
Ray-triangle intersection
 Ray-triagle itersectio ria urless October 2006 I this hadout, we explore the steps eeded to compute the itersectio of a ray with a triagle, ad the to compute the barycetric coordiates of that itersectio.
Ray-triagle itersectio ria urless October 2006 I this hadout, we explore the steps eeded to compute the itersectio of a ray with a triagle, ad the to compute the barycetric coordiates of that itersectio.
Computational Fluid Dynamics. Lecture 3
 Computatioal Fluid Dyamics Lecture 3 Discretizatio Cotiued. A fourth order approximatio to f x ca be foud usig Taylor Series. ( + ) + ( + ) + + ( ) + ( ) = a f x x b f x x c f x d f x x e f x x f x 0 0
Computatioal Fluid Dyamics Lecture 3 Discretizatio Cotiued. A fourth order approximatio to f x ca be foud usig Taylor Series. ( + ) + ( + ) + + ( ) + ( ) = a f x x b f x x c f x d f x x e f x x f x 0 0
Z - Transform. It offers the techniques for digital filter design and frequency analysis of digital signals.
 Z - Trasform The -trasform is a very importat tool i describig ad aalyig digital systems. It offers the techiques for digital filter desig ad frequecy aalysis of digital sigals. Defiitio of -trasform:
Z - Trasform The -trasform is a very importat tool i describig ad aalyig digital systems. It offers the techiques for digital filter desig ad frequecy aalysis of digital sigals. Defiitio of -trasform:
In algebra one spends much time finding common denominators and thus simplifying rational expressions. For example:
 74 The Method of Partial Fractios I algebra oe speds much time fidig commo deomiators ad thus simplifyig ratioal epressios For eample: + + + 6 5 + = + = = + + + + + ( )( ) 5 It may the seem odd to be watig
74 The Method of Partial Fractios I algebra oe speds much time fidig commo deomiators ad thus simplifyig ratioal epressios For eample: + + + 6 5 + = + = = + + + + + ( )( ) 5 It may the seem odd to be watig
Notes on iteration and Newton s method. Iteration
 Notes o iteratio ad Newto s method Iteratio Iteratio meas doig somethig over ad over. I our cotet, a iteratio is a sequece of umbers, vectors, fuctios, etc. geerated by a iteratio rule of the type 1 f
Notes o iteratio ad Newto s method Iteratio Iteratio meas doig somethig over ad over. I our cotet, a iteratio is a sequece of umbers, vectors, fuctios, etc. geerated by a iteratio rule of the type 1 f
Ray Optics Theory and Mode Theory. Dr. Mohammad Faisal Dept. of EEE, BUET
 Ray Optics Theory ad Mode Theory Dr. Mohammad Faisal Dept. of, BUT Optical Fiber WG For light to be trasmitted through fiber core, i.e., for total iteral reflectio i medium, > Ray Theory Trasmissio Ray
Ray Optics Theory ad Mode Theory Dr. Mohammad Faisal Dept. of, BUT Optical Fiber WG For light to be trasmitted through fiber core, i.e., for total iteral reflectio i medium, > Ray Theory Trasmissio Ray
A numerical Technique Finite Volume Method for Solving Diffusion 2D Problem
 The Iteratioal Joural Of Egieerig d Sciece (IJES) Volume 4 Issue 10 Pages PP -35-41 2015 ISSN (e): 2319 1813 ISSN (p): 2319 1805 umerical Techique Fiite Volume Method for Solvig Diffusio 2D Problem 1 Mohammed
The Iteratioal Joural Of Egieerig d Sciece (IJES) Volume 4 Issue 10 Pages PP -35-41 2015 ISSN (e): 2319 1813 ISSN (p): 2319 1805 umerical Techique Fiite Volume Method for Solvig Diffusio 2D Problem 1 Mohammed
PAPER : IIT-JAM 2010
 MATHEMATICS-MA (CODE A) Q.-Q.5: Oly oe optio is correct for each questio. Each questio carries (+6) marks for correct aswer ad ( ) marks for icorrect aswer.. Which of the followig coditios does NOT esure
MATHEMATICS-MA (CODE A) Q.-Q.5: Oly oe optio is correct for each questio. Each questio carries (+6) marks for correct aswer ad ( ) marks for icorrect aswer.. Which of the followig coditios does NOT esure
Linear Differential Equations of Higher Order Basic Theory: Initial-Value Problems d y d y dy
 Liear Differetial Equatios of Higher Order Basic Theory: Iitial-Value Problems d y d y dy Solve: a( ) + a ( )... a ( ) a0( ) y g( ) + + + = d d d ( ) Subject to: y( 0) = y0, y ( 0) = y,..., y ( 0) = y
Liear Differetial Equatios of Higher Order Basic Theory: Iitial-Value Problems d y d y dy Solve: a( ) + a ( )... a ( ) a0( ) y g( ) + + + = d d d ( ) Subject to: y( 0) = y0, y ( 0) = y,..., y ( 0) = y
Lecture 2: Monte Carlo Simulation
 STAT/Q SCI 43: Itroductio to Resamplig ethods Sprig 27 Istructor: Ye-Chi Che Lecture 2: ote Carlo Simulatio 2 ote Carlo Itegratio Assume we wat to evaluate the followig itegratio: e x3 dx What ca we do?
STAT/Q SCI 43: Itroductio to Resamplig ethods Sprig 27 Istructor: Ye-Chi Che Lecture 2: ote Carlo Simulatio 2 ote Carlo Itegratio Assume we wat to evaluate the followig itegratio: e x3 dx What ca we do?
Properties and Tests of Zeros of Polynomial Functions
 Properties ad Tests of Zeros of Polyomial Fuctios The Remaider ad Factor Theorems: Sythetic divisio ca be used to fid the values of polyomials i a sometimes easier way tha substitutio. This is show by
Properties ad Tests of Zeros of Polyomial Fuctios The Remaider ad Factor Theorems: Sythetic divisio ca be used to fid the values of polyomials i a sometimes easier way tha substitutio. This is show by
The Advection-Diffusion equation!
 ttp://www.d.edu/~gtryggva/cf-course/! Te Advectio-iffusio equatio! Grétar Tryggvaso! Sprig 3! Navier-Stokes equatios! Summary! u t + u u x + v u y = P ρ x + µ u + u ρ y Hyperbolic part! u x + v y = Elliptic
ttp://www.d.edu/~gtryggva/cf-course/! Te Advectio-iffusio equatio! Grétar Tryggvaso! Sprig 3! Navier-Stokes equatios! Summary! u t + u u x + v u y = P ρ x + µ u + u ρ y Hyperbolic part! u x + v y = Elliptic
Sequences and Series of Functions
 Chapter 6 Sequeces ad Series of Fuctios 6.1. Covergece of a Sequece of Fuctios Poitwise Covergece. Defiitio 6.1. Let, for each N, fuctio f : A R be defied. If, for each x A, the sequece (f (x)) coverges
Chapter 6 Sequeces ad Series of Fuctios 6.1. Covergece of a Sequece of Fuctios Poitwise Covergece. Defiitio 6.1. Let, for each N, fuctio f : A R be defied. If, for each x A, the sequece (f (x)) coverges
SNAP Centre Workshop. Basic Algebraic Manipulation
 SNAP Cetre Workshop Basic Algebraic Maipulatio 8 Simplifyig Algebraic Expressios Whe a expressio is writte i the most compact maer possible, it is cosidered to be simplified. Not Simplified: x(x + 4x)
SNAP Cetre Workshop Basic Algebraic Maipulatio 8 Simplifyig Algebraic Expressios Whe a expressio is writte i the most compact maer possible, it is cosidered to be simplified. Not Simplified: x(x + 4x)
Mathematical Methods for Physics and Engineering
 Mathematical Methods for Physics ad Egieerig Lecture otes Sergei V. Shabaov Departmet of Mathematics, Uiversity of Florida, Gaiesville, FL 326 USA CHAPTER The theory of covergece. Numerical sequeces..
Mathematical Methods for Physics ad Egieerig Lecture otes Sergei V. Shabaov Departmet of Mathematics, Uiversity of Florida, Gaiesville, FL 326 USA CHAPTER The theory of covergece. Numerical sequeces..
A widely used display of protein shapes is based on the coordinates of the alpha carbons - - C α
 Nice plottig of proteis: I A widely used display of protei shapes is based o the coordiates of the alpha carbos - - C α -s. The coordiates of the C α -s are coected by a cotiuous curve that roughly follows
Nice plottig of proteis: I A widely used display of protei shapes is based o the coordiates of the alpha carbos - - C α -s. The coordiates of the C α -s are coected by a cotiuous curve that roughly follows
MAT1026 Calculus II Basic Convergence Tests for Series
 MAT026 Calculus II Basic Covergece Tests for Series Egi MERMUT 202.03.08 Dokuz Eylül Uiversity Faculty of Sciece Departmet of Mathematics İzmir/TURKEY Cotets Mootoe Covergece Theorem 2 2 Series of Real
MAT026 Calculus II Basic Covergece Tests for Series Egi MERMUT 202.03.08 Dokuz Eylül Uiversity Faculty of Sciece Departmet of Mathematics İzmir/TURKEY Cotets Mootoe Covergece Theorem 2 2 Series of Real
Chapter 9 - CD companion 1. A Generic Implementation; The Common-Merge Amplifier. 1 τ is. ω ch. τ io
 Chapter 9 - CD compaio CHAPTER NINE CD-9.2 CD-9.2. Stages With Voltage ad Curret Gai A Geeric Implemetatio; The Commo-Merge Amplifier The advaced method preseted i the text for approximatig cutoff frequecies
Chapter 9 - CD compaio CHAPTER NINE CD-9.2 CD-9.2. Stages With Voltage ad Curret Gai A Geeric Implemetatio; The Commo-Merge Amplifier The advaced method preseted i the text for approximatig cutoff frequecies
( a) ( ) 1 ( ) 2 ( ) ( ) 3 3 ( ) =!
 ( ) 1 ( ) 2 ( ) ( ) 3 3 ( ) =!") .8,.9: Taylor ad Maclauri Series.8. Although we were able to fid power series represetatios for a limited group of fuctios i the previous sectio, it is ot immediately obvious whether ay give fuctio has
.8,.9: Taylor ad Maclauri Series.8. Although we were able to fid power series represetatios for a limited group of fuctios i the previous sectio, it is ot immediately obvious whether ay give fuctio has
TR/46 OCTOBER THE ZEROS OF PARTIAL SUMS OF A MACLAURIN EXPANSION A. TALBOT
 TR/46 OCTOBER 974 THE ZEROS OF PARTIAL SUMS OF A MACLAURIN EXPANSION by A. TALBOT .. Itroductio. A problem i approximatio theory o which I have recetly worked [] required for its solutio a proof that the
TR/46 OCTOBER 974 THE ZEROS OF PARTIAL SUMS OF A MACLAURIN EXPANSION by A. TALBOT .. Itroductio. A problem i approximatio theory o which I have recetly worked [] required for its solutio a proof that the
SOLUTIONS TO EXAM 3. Solution: Note that this defines two convergent geometric series with respective radii r 1 = 2/5 < 1 and r 2 = 1/5 < 1.
 SOLUTIONS TO EXAM 3 Problem Fid the sum of the followig series 2 + ( ) 5 5 2 5 3 25 2 2 This series diverges Solutio: Note that this defies two coverget geometric series with respective radii r 2/5 < ad
SOLUTIONS TO EXAM 3 Problem Fid the sum of the followig series 2 + ( ) 5 5 2 5 3 25 2 2 This series diverges Solutio: Note that this defies two coverget geometric series with respective radii r 2/5 < ad
Numerical Methods in Fourier Series Applications
 Numerical Methods i Fourier Series Applicatios Recall that the basic relatios i usig the Trigoometric Fourier Series represetatio were give by f ( x) a o ( a x cos b x si ) () where the Fourier coefficiets
Numerical Methods i Fourier Series Applicatios Recall that the basic relatios i usig the Trigoometric Fourier Series represetatio were give by f ( x) a o ( a x cos b x si ) () where the Fourier coefficiets
Math 113 Exam 4 Practice
 Math Exam 4 Practice Exam 4 will cover.-.. This sheet has three sectios. The first sectio will remid you about techiques ad formulas that you should kow. The secod gives a umber of practice questios for
Math Exam 4 Practice Exam 4 will cover.-.. This sheet has three sectios. The first sectio will remid you about techiques ad formulas that you should kow. The secod gives a umber of practice questios for
Løsningsførslag i 4M
 Norges tekisk aturviteskapelige uiversitet Istitutt for matematiske fag Side 1 av 6 Løsigsførslag i 4M Oppgave 1 a) A sketch of the graph of the give f o the iterval [ 3, 3) is as follows: The Fourier
Norges tekisk aturviteskapelige uiversitet Istitutt for matematiske fag Side 1 av 6 Løsigsførslag i 4M Oppgave 1 a) A sketch of the graph of the give f o the iterval [ 3, 3) is as follows: The Fourier
Numerical Astrophysics: hydrodynamics
 Numerical Astrophysics: hydrodyamics Part 1: Numerical solutios to the Euler Equatios Outlie Numerical eperimets are a valuable tool to study astrophysical objects (where we ca rarely do direct eperimets).
Numerical Astrophysics: hydrodyamics Part 1: Numerical solutios to the Euler Equatios Outlie Numerical eperimets are a valuable tool to study astrophysical objects (where we ca rarely do direct eperimets).
Fluid Physics 8.292J/12.330J % (1)
") Fluid Physics 89J/133J Problem Set 5 Solutios 1 Cosider the flow of a Euler fluid i the x directio give by for y > d U = U y 1 d for y d U + y 1 d for y < This flow does ot vary i x or i z Determie the
Fluid Physics 89J/133J Problem Set 5 Solutios 1 Cosider the flow of a Euler fluid i the x directio give by for y > d U = U y 1 d for y d U + y 1 d for y < This flow does ot vary i x or i z Determie the
Finite Difference Approximation for Transport Equation with Shifts Arising in Neuronal Variability
 Iteratioal Joural of Sciece ad Research (IJSR) ISSN (Olie): 39-764 Ide Copericus Value (3): 64 Impact Factor (3): 4438 Fiite Differece Approimatio for Trasport Equatio with Shifts Arisig i Neuroal Variability
Iteratioal Joural of Sciece ad Research (IJSR) ISSN (Olie): 39-764 Ide Copericus Value (3): 64 Impact Factor (3): 4438 Fiite Differece Approimatio for Trasport Equatio with Shifts Arisig i Neuroal Variability
Apply change-of-basis formula to rewrite x as a linear combination of eigenvectors v j.
 Eigevalue-Eigevector Istructor: Nam Su Wag eigemcd Ay vector i real Euclidea space of dimesio ca be uiquely epressed as a liear combiatio of liearly idepedet vectors (ie, basis) g j, j,,, α g α g α g α
Eigevalue-Eigevector Istructor: Nam Su Wag eigemcd Ay vector i real Euclidea space of dimesio ca be uiquely epressed as a liear combiatio of liearly idepedet vectors (ie, basis) g j, j,,, α g α g α g α
Numerical Methods for Partial Differential Equations
 Numerical Methods for Partial Differetial Equatios CAAM 45 Sprig 005 Lecture 4 -step time-steppig methods: stability, accuracy Ruge-Kutta Methods, Istructor: Tim Warburto Today Recall AB stability regios
Numerical Methods for Partial Differetial Equatios CAAM 45 Sprig 005 Lecture 4 -step time-steppig methods: stability, accuracy Ruge-Kutta Methods, Istructor: Tim Warburto Today Recall AB stability regios
Math 113 Exam 3 Practice
 Math Exam Practice Exam will cover.-.9. This sheet has three sectios. The first sectio will remid you about techiques ad formulas that you should kow. The secod gives a umber of practice questios for you
Math Exam Practice Exam will cover.-.9. This sheet has three sectios. The first sectio will remid you about techiques ad formulas that you should kow. The secod gives a umber of practice questios for you
Chapter 6 Infinite Series
 Chapter 6 Ifiite Series I the previous chapter we cosidered itegrals which were improper i the sese that the iterval of itegratio was ubouded. I this chapter we are goig to discuss a topic which is somewhat
Chapter 6 Ifiite Series I the previous chapter we cosidered itegrals which were improper i the sese that the iterval of itegratio was ubouded. I this chapter we are goig to discuss a topic which is somewhat
A STUDY ON MHD BOUNDARY LAYER FLOW OVER A NONLINEAR STRETCHING SHEET USING IMPLICIT FINITE DIFFERENCE METHOD
 IRET: Iteratioal oural of Research i Egieerig ad Techology eissn: 39-63 pissn: 3-7308 A STUDY ON MHD BOUNDARY LAYER FLOW OVER A NONLINEAR STRETCHING SHEET USING IMPLICIT FINITE DIFFERENCE METHOD Satish
IRET: Iteratioal oural of Research i Egieerig ad Techology eissn: 39-63 pissn: 3-7308 A STUDY ON MHD BOUNDARY LAYER FLOW OVER A NONLINEAR STRETCHING SHEET USING IMPLICIT FINITE DIFFERENCE METHOD Satish
Z ß cos x + si x R du We start with the substitutio u = si(x), so du = cos(x). The itegral becomes but +u we should chage the limits to go with the ew
, so du = cos(x). The itegral becomes but +u we should chage the limits to go with the ew") Problem ( poits) Evaluate the itegrals Z p x 9 x We ca draw a right triagle labeled this way x p x 9 From this we ca read off x = sec, so = sec ta, ad p x 9 = R ta. Puttig those pieces ito the itegralrwe
Problem ( poits) Evaluate the itegrals Z p x 9 x We ca draw a right triagle labeled this way x p x 9 From this we ca read off x = sec, so = sec ta, ad p x 9 = R ta. Puttig those pieces ito the itegralrwe
PHY4905: Nearly-Free Electron Model (NFE)
") PHY4905: Nearly-Free Electro Model (NFE) D. L. Maslov Departmet of Physics, Uiversity of Florida (Dated: Jauary 12, 2011) 1 I. REMINDER: QUANTUM MECHANICAL PERTURBATION THEORY A. No-degeerate eigestates
PHY4905: Nearly-Free Electro Model (NFE) D. L. Maslov Departmet of Physics, Uiversity of Florida (Dated: Jauary 12, 2011) 1 I. REMINDER: QUANTUM MECHANICAL PERTURBATION THEORY A. No-degeerate eigestates
Appendix: The Laplace Transform
 Appedix: The Laplace Trasform The Laplace trasform is a powerful method that ca be used to solve differetial equatio, ad other mathematical problems. Its stregth lies i the fact that it allows the trasformatio
Appedix: The Laplace Trasform The Laplace trasform is a powerful method that ca be used to solve differetial equatio, ad other mathematical problems. Its stregth lies i the fact that it allows the trasformatio
The picture in figure 1.1 helps us to see that the area represents the distance traveled. Figure 1: Area represents distance travelled
 1 Lecture : Area Area ad distace traveled Approximatig area by rectagles Summatio The area uder a parabola 1.1 Area ad distace Suppose we have the followig iformatio about the velocity of a particle, how
1 Lecture : Area Area ad distace traveled Approximatig area by rectagles Summatio The area uder a parabola 1.1 Area ad distace Suppose we have the followig iformatio about the velocity of a particle, how