Scheduling with AND/OR Precedence Constraints
|
|
|
- Iris Morris
- 5 years ago
- Views:
Transcription
1 Scheduling with AND/OR Precedence Constraints Seminar Mathematische Optimierung - SS th April 2007
2 Synthesis synthesis: transfer from the behavioral domain (e. g. system specifications, algorithms) to the structural domain (e. g. processor, controllers) methods: allocation assignment scheduling compute start times for operations minimize costs today: (by me) next week: Solving Project Scheduling Problems by Minimum Cut Computations (by Christian Rinder)
3 Example
4 Table of Contents 1 Definitions and Graph Representation 2 Realizations 3 Implicit Constraints 4 Minimal Representation 5 Computing Earliest Job Start Times
5 AND/OR Precedence Constraints Definition V : set of jobs W: set of waiting conditions w = (X, j) where job j V cannot be started until at least one of the jobs X (V \{j}) is done represented by a directed graph D = (V, A): V = V W: set of nodes every waiting condition w = (X, j) W is represented by arcs (i, w) A for every i X and an additional arc (w, j) A
6 AND/OR Precedence Constraints V = {j 1, j 2, j 3, j 4 } W = {w 1 =({j 1 }, j 2 ), w 2 =({j 2, j 3 }, j 1 ), w 3 =({j 1, j 4 }, j 3 )}
7 Realizations Definitions realization: partial order R = (V, R ) on V where for each (X, j) W there exists an i X with i R j linear realization: realization which is a total order W is feasible if and only if there exists a (linear) realization for W. Note: Every extension R = (V, R ) of a realization R (i. e. i R j, then i R j) is also a realization.
8 Realizations V = {j 1, j 2, j 3, j 4 } W = {w 1 =({j 1 }, j 2 ), w 2 =({j 2, j 3 }, j 1 ), w 3 =({j 1, j 4 }, j 3 )} Example j 4 R j 3 R j 1 R j 2 is a linear realization.
9 Idea for Checking Feasibility Is a set W of AND/OR precedence constraints feasible? Construct a linear realization L in a greedy way: Does there exist a job j V which is not a waiting job of a waiting condition in W? insert j at the end of L Is a waiting condition (X, j) satisfied? delete (X, j) from W Iterate these steps until no other job can be planned (e. g. all jobs are planned)
10 Algorithm for Checking Feasibility Input: set V of jobs and set W of waiting conditions Output: list L of jobs from V Q := L := for jobs j V do a(j) := {(X, j) W} if a(j) = 0 then add j to Q end end
11 Algorithm for Checking Feasibility (continued) while Q do remove a job i from Q insert i at the end of L for waiting conditions (X, j) W with i X do decrease a(j) by 1 if a(j) = 0 then add j to Q end remove (X, j) from W end end
12 Algorithm for Checking Feasibility W = {w 1, w 2, w 3 } Q = {} L = () a(j 1 ) = a(j 2 ) = a(j 3 ) = a(j 4 ) =
13 Algorithm for Checking Feasibility W = {w 1, w 2, w 3 } Q = {j 4 } L = () a(j 1 ) = 1 a(j 2 ) = 1 a(j 3 ) = 1 a(j 4 ) = 0
14 Algorithm for Checking Feasibility W = {w 1, w 2 } Q = {j 3 } L = (j 4 ) a(j 1 ) = 1 a(j 2 ) = 1 a(j 3 ) = 0 a(j 4 ) = 0
15 Algorithm for Checking Feasibility W = {w 1 } Q = {j 1 } L = (j 4, j 3 ) a(j 1 ) = 0 a(j 2 ) = 1 a(j 3 ) = 0 a(j 4 ) = 0
16 Algorithm for Checking Feasibility W = {} Q = {j 2 } L = (j 4, j 3, j 1 ) a(j 1 ) = 0 a(j 2 ) = 0 a(j 3 ) = 0 a(j 4 ) = 0
17 Algorithm for Checking Feasibility W = {} Q = {} L = (j 4, j 3, j 1, j 2 ) a(j 1 ) = 0 a(j 2 ) = 0 a(j 3 ) = 0 a(j 4 ) = 0
18 Algorithm for Checking Feasibility (Proof) Theorem A set of AND/OR precedence constraints is feasible if and only if the list L obtained from the algorithm contains all jobs of V.
19 Definition of Implicit AND/OR Precedence Constraints Goal: Derive new constraints from a given set W Definitions Let U V and j V \U. Then the waiting condition (U, j) is implied by W if and only if for every realization R = (V, R ) of W there exists an i U with i R j. Let Y V. Then W Y = {(X Y, j) (X, j) W, j Y } is the set of induced waiting conditions. But: How can we compute such constraints?
20 Algorithm for Detecting Implicit Constraints Theorem For given U V let L be the output of the algorithm with input V \U and W V \U. The set of waiting conditions of the form (U, j) which are implied by W is precisely {(U, j) : j V \(L U)}. Example V = {j 1, j 2, j 3, j 4 }, W = {({j 1 }, j 2 ), ({j 2, j 3 }, j 1 ), ({j 1, j 4 }, j 3 )} Choose U = {j 3 } W V \U = {({j 1 }, j 2 ), ({j 2 }, j 1 )} Algorithm: L = (j 4 ) implied waiting conditions (U, j): ({j 3 }, j 1 ), ({j 3 }, j 2 )
21 Minimal Representation of AND/OR Precedence Constraints Definitions W minimal: 1 no waiting condition (X, j) W is implied by W\{(X, j)}, and 2 for each waiting condition (X, j) W the set X is minimal with respect to inclusion, i. e. for all i X the waiting condition (X \{i}, j) is not implied by W. W, W equivalent: their sets of (linear) realizations coincide W minimal reduction of W: W, W equivalent and W minimal
22 Examples for Minimal Representation Examples V = {j 1, j 2, j 3, j 4 }, W = {({j 1 }, j 2 ), ({j 2, j 3 }, j 1 ), ({j 1, j 4 }, j 3 )} W not minimal since ({j 3 }, j 1 ) is implied by W W = {({j 1 }, j 2 ), ({j 3 }, j 1 ), ({j 4 }, j 3 )} minimal reduction of W
23 Unique Minimal Reduction Theorem Each feasible set of waiting conditions has a unique minimal reduction.
24 Definitions Definition d iw Z: time lag for job i V and waiting condition w = (X, j) W S = (S 1,..., S n ) Z V : vector of start times for all jobs in V S (Z { }) V : partial schedule, i. e. S i = means that job i V is not planned Job processing times p i can be modeled by setting d iw := p i for all w = (X, j) W with i X. d iw < 0 can be interpreted as maximal time lags.
25 First Model Find (optimal) S such that S j min i X (S i + d iw ) is satisfied for all waiting conditions w = (X, j) W.
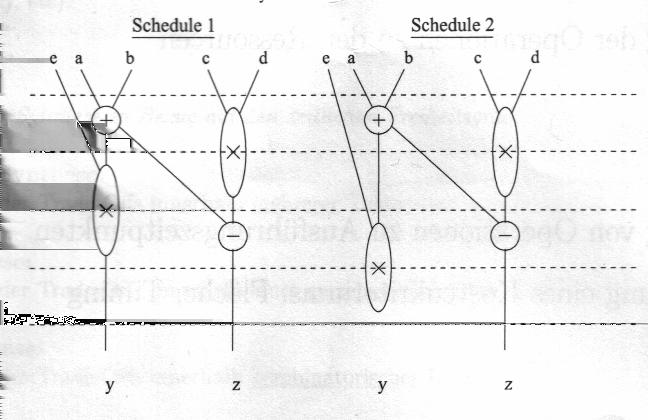
26 Graph Representation and Example Definition AND-nodes: jobs in V OR-nodes: jobs in W
27 Introducing Dummy Jobs We want to simplify our model: interpret waiting conditions w W as dummy jobs add dummy job s to V and additional waiting conditions ({s}, j) to W for every j V reformulate previous constraints to S w min i X (S i + d iw ) and S j S w for every waiting condition w = (X, j) W and S s 0 since s is our starting point. It follows: S j 0 for all AND-nodes j V
28 Final Model for (ES) Find a componentwise minimal schedule S Z V such that S s 0 S j S w max (S w + d wj ), (w,j) A min (S j + d jw ), (j,w) A j V w W Without loss of generality: d wj = 0 (otherwise set d iw to d iw + d wj for all i in(w))
29 More about Schedules and (ES) S = (,..., ) is feasible for (ES) S, S feasible S = min(s, S ) feasible There exists a (unique) componentwise minimal partial schedule S. In (ES) we can replace by = without changing the optimal solution.
30 Computing Earliest Job Start Times Consider now only positive arc weights, i. e. d iw > 0. How can we compute the earliest job start times? Start with S s = 0, S w = 0 for all w out(s) and S w = for all other OR-nodes w Iteration: Choose not yet planned OR-node w 0 = (X, j) with minimal start time S w0 Plan w 0 with start time S w0 Plan AND-node j if all waiting conditions are now satisfied Update S w for all not yet planned OR-nodes w
31 Computing Earliest Job Start Times 1 Input: digraph D = (V = V W, A) with positive arc weights on the arcs in V W A Output: feasible (partial) schedule S (Z { }) V Heap := for AND-nodes j V do a(j) := in(j) S s := 0 // AND-node s is planned at time 0 for OR-nodes w W do if w out(s) then insert w in Heap with key S w := 0 else insert w in Heap with key S w := end end
32 Computing Earliest Job Start Times 2 3 while Heap do remove next OR-node w 0 = (X, j) from Heap // OR-node is planned reduce a(j) by 1 if a(j) = 0 then S j := max w in(j) S w // AND-node is planned for OR-nodes w out(j) do S w := min{s w, S j + d jw } decrease key of w in Heap to S w end end delete node w 0 and all incident arcs from D end
33 Computing Earliest Job Start Times Example Heap = {S s1 = 0, S s2 = 0, S s3 = 0, S s4 = 0, S w1 =, S w2 =, S w3 = } Planned AND-nodes = {S s = 0} Planned OR-nodes = {} a(j 1 ) = 2 a(j 2 ) = 2 a(j 3 ) = 2 a(j 4 ) = 1
34 Computing Earliest Job Start Times Example Heap = {S s2 = 0, S s3 = 0, S s4 = 0, S w1 =, S w2 =, S w3 = } Planned AND-nodes = {S s = 0} Planned OR-nodes = {S s1 = 0} a(j 1 ) = 1 a(j 2 ) = 2 a(j 3 ) = 2 a(j 4 ) = 1
35 Computing Earliest Job Start Times Example Heap = {S s3 = 0, S s4 = 0, S w1 =, S w2 =, S w3 = } Planned AND-nodes = {S s = 0} Planned OR-nodes = {S s1 = 0, S s2 = 0} a(j 1 ) = 1 a(j 2 ) = 1 a(j 3 ) = 2 a(j 4 ) = 1
36 Computing Earliest Job Start Times Example Heap = {S s4 = 0, S w1 =, S w2 =, S w3 = } Planned AND-nodes = {S s = 0} Planned OR-nodes = {S s1 = 0, S s2 = 0, S s3 = 0} a(j 1 ) = 1 a(j 2 ) = 1 a(j 3 ) = 1 a(j 4 ) = 1
37 Computing Earliest Job Start Times Example Heap = {S w1 =, S w2 =, S w3 = 3} Planned AND-nodes = {S s = 0, S j4 = 0} Planned OR-nodes = {S s1 = 0, S s2 = 0, S s3 = 0, S s4 = 0} a(j 1 ) = 1 a(j 2 ) = 1 a(j 3 ) = 1 a(j 4 ) = 0
38 Computing Earliest Job Start Times Example Heap = {S w1 =, S w2 = 4} Planned AND-nodes = {S s = 0, S j4 = 0, S j3 = 3} Planned OR-nodes = {S s1 = 0, S s2 = 0, S s3 = 0, S s4 = 0, S w3 = 3} a(j 1 ) = 1 a(j 2 ) = 1 a(j 3 ) = 0 a(j 4 ) = 0
39 Computing Earliest Job Start Times Example Heap = {S w1 = 6} Planned AND-nodes = {S s = 0, S j4 = 0, S j3 = 3, S j1 = 4} Planned OR-nodes = {S s1 = 0, S s2 = 0, S s3 = 0, S s4 = 0, S w3 = 3, S w2 = 4} a(j 1 ) = 0 a(j 2 ) = 1 a(j 3 ) = 0 a(j 4 ) = 0
40 Computing Earliest Job Start Times Example Heap = {} Planned AND-nodes = {S s = 0, S j4 = 0, S j3 = 3, S j1 = 4, S j2 = 6} Planned OR-nodes = {S s1 = 0, S s2 = 0, S s3 = 0, S s4 = 0, S w3 = 3, S w2 = 4, S w1 = 6} a(j 1 ) = 0 a(j 2 ) = 0 a(j 3 ) = 0 a(j 4 ) = 0
41 Computing Earliest Job Start Times Example Start times: AND-nodes: (4, 6, 3, 0) OR-nodes: (6, 4, 3) Possible realization: j 4 w 3 j 3 w 2 j 1 w 1 j 2
42 Computing Earliest Job Start Times Theorem For a given set of AND/OR precedence constraints represented by a digraph D = (V W, A) with nonnegative arc weights and without cycles of length 0, the algorithm computes an optimal partial schedule S. In particular, the instance is infeasible if and only if S w = for some OR-node w.
43 Computing Earliest Job Start Times Theorem For a given set of AND/OR precedence constraints represented by a digraph D = (V W, A) with nonnegative arc weights and without cycles of length 0, the algorithm computes an optimal partial schedule S. In particular, the instance is infeasible if and only if S w = for some OR-node w. Lemma The algorithm can be implemented to run in O( W log W + A + V ) time.
44 Generalization to Nonnegative Arc Weights We also want to compute earliest job start times for d jw 0 instead only d jw > 0. Previous algorithm gives us: Theorem For a given set of AND/OR precedence constraints represented by a digraph D = (V W, A) with nonnegative arc weights and without cycles of length 0, the algorithm computes an optimal partial schedule S. In particular, the instance is infeasible if and only if S w = for some OR-node w.
45 Generalization to Nonnegative Arc Weights We also want to compute earliest job start times for d jw 0 instead only d jw > 0. There exists an algorithm with: Theorem For a given set of AND/OR precedence constraints represented by a digraph D = (V W, A) with nonnegative arc weights, the algorithm computes an optimal partial schedule S. In particular, the instance is infeasible if and only if S w = for some OR-node w.
46 Arbitrary Arc Weights Consider d iw with M < d iw < M, M 0 We cannot use feasibility results from previous sections since they require d iw = p i > 0, i. e. j V can be started if and only if all waiting conditions (X, j) W are satisfied. Definition A set W of waiting conditions is feasible if and only if there exists a feasible schedule S for (ES).
47 Thank you for listening! Questions?
c 2004 Society for Industrial and Applied Mathematics
 SIAM J. COMPUT. Vol. 33, No. 2, pp. 393 415 c 2004 Society for Industrial and Applied Mathematics SCHEDULING WITH AND/OR PRECEDENCE CONSTRAINTS ROLF H. MÖHRING, MARTIN SKUTELLA, AND FREDERIK STORK Abstract.
SIAM J. COMPUT. Vol. 33, No. 2, pp. 393 415 c 2004 Society for Industrial and Applied Mathematics SCHEDULING WITH AND/OR PRECEDENCE CONSTRAINTS ROLF H. MÖHRING, MARTIN SKUTELLA, AND FREDERIK STORK Abstract.
Minimum cost transportation problem
 Minimum cost transportation problem Complements of Operations Research Giovanni Righini Università degli Studi di Milano Definitions The minimum cost transportation problem is a special case of the minimum
Minimum cost transportation problem Complements of Operations Research Giovanni Righini Università degli Studi di Milano Definitions The minimum cost transportation problem is a special case of the minimum
Chapter 4. Greedy Algorithms. Slides by Kevin Wayne. Copyright 2005 Pearson-Addison Wesley. All rights reserved.
 Chapter 4 Greedy Algorithms Slides by Kevin Wayne. Copyright Pearson-Addison Wesley. All rights reserved. 4 4.1 Interval Scheduling Interval Scheduling Interval scheduling. Job j starts at s j and finishes
Chapter 4 Greedy Algorithms Slides by Kevin Wayne. Copyright Pearson-Addison Wesley. All rights reserved. 4 4.1 Interval Scheduling Interval Scheduling Interval scheduling. Job j starts at s j and finishes
Algorithm Design. Scheduling Algorithms. Part 2. Parallel machines. Open-shop Scheduling. Job-shop Scheduling.
 Algorithm Design Scheduling Algorithms Part 2 Parallel machines. Open-shop Scheduling. Job-shop Scheduling. 1 Parallel Machines n jobs need to be scheduled on m machines, M 1,M 2,,M m. Each machine can
Algorithm Design Scheduling Algorithms Part 2 Parallel machines. Open-shop Scheduling. Job-shop Scheduling. 1 Parallel Machines n jobs need to be scheduled on m machines, M 1,M 2,,M m. Each machine can
Flow Shop and Job Shop Models
 Outline DM87 SCHEDULING, TIMETABLING AND ROUTING Lecture 11 Flow Shop and Job Shop Models 1. Flow Shop 2. Job Shop Marco Chiarandini DM87 Scheduling, Timetabling and Routing 2 Outline Resume Permutation
Outline DM87 SCHEDULING, TIMETABLING AND ROUTING Lecture 11 Flow Shop and Job Shop Models 1. Flow Shop 2. Job Shop Marco Chiarandini DM87 Scheduling, Timetabling and Routing 2 Outline Resume Permutation
Coin Changing: Give change using the least number of coins. Greedy Method (Chapter 10.1) Attempt to construct an optimal solution in stages.
 Attempt to construct an optimal solution in stages.") IV-0 Definitions Optimization Problem: Given an Optimization Function and a set of constraints, find an optimal solution. Optimal Solution: A feasible solution for which the optimization function has the
IV-0 Definitions Optimization Problem: Given an Optimization Function and a set of constraints, find an optimal solution. Optimal Solution: A feasible solution for which the optimization function has the
Chapter 4. Greedy Algorithms. Slides by Kevin Wayne. Copyright 2005 Pearson-Addison Wesley. All rights reserved.
 Chapter 4 Greedy Algorithms Slides by Kevin Wayne. Copyright 2005 Pearson-Addison Wesley. All rights reserved. 1 4.1 Interval Scheduling Interval Scheduling Interval scheduling. Job j starts at s j and
Chapter 4 Greedy Algorithms Slides by Kevin Wayne. Copyright 2005 Pearson-Addison Wesley. All rights reserved. 1 4.1 Interval Scheduling Interval Scheduling Interval scheduling. Job j starts at s j and
Discrete Wiskunde II. Lecture 5: Shortest Paths & Spanning Trees
 , 2009 Lecture 5: Shortest Paths & Spanning Trees University of Twente m.uetz@utwente.nl wwwhome.math.utwente.nl/~uetzm/dw/ Shortest Path Problem "#$%&'%()*%"()$#+,&- Given directed "#$%&'()*+,%+('-*.#/'01234564'.*,'7+"-%/8',&'5"4'84%#3
, 2009 Lecture 5: Shortest Paths & Spanning Trees University of Twente m.uetz@utwente.nl wwwhome.math.utwente.nl/~uetzm/dw/ Shortest Path Problem "#$%&'%()*%"()$#+,&- Given directed "#$%&'()*+,%+('-*.#/'01234564'.*,'7+"-%/8',&'5"4'84%#3
A Dynamic Programming algorithm for minimizing total cost of duplication in scheduling an outtree with communication delays and duplication
 A Dynamic Programming algorithm for minimizing total cost of duplication in scheduling an outtree with communication delays and duplication Claire Hanen Laboratory LIP6 4, place Jussieu F-75 252 Paris
A Dynamic Programming algorithm for minimizing total cost of duplication in scheduling an outtree with communication delays and duplication Claire Hanen Laboratory LIP6 4, place Jussieu F-75 252 Paris
8. INTRACTABILITY I. Lecture slides by Kevin Wayne Copyright 2005 Pearson-Addison Wesley. Last updated on 2/6/18 2:16 AM
 8. INTRACTABILITY I poly-time reductions packing and covering problems constraint satisfaction problems sequencing problems partitioning problems graph coloring numerical problems Lecture slides by Kevin
8. INTRACTABILITY I poly-time reductions packing and covering problems constraint satisfaction problems sequencing problems partitioning problems graph coloring numerical problems Lecture slides by Kevin
Combinatorial optimization problems
 Combinatorial optimization problems Heuristic Algorithms Giovanni Righini University of Milan Department of Computer Science (Crema) Optimization In general an optimization problem can be formulated as:
Combinatorial optimization problems Heuristic Algorithms Giovanni Righini University of Milan Department of Computer Science (Crema) Optimization In general an optimization problem can be formulated as:
Discrete (and Continuous) Optimization WI4 131
 Optimization WI4 131") Discrete (and Continuous) Optimization WI4 131 Kees Roos Technische Universiteit Delft Faculteit Electrotechniek, Wiskunde en Informatica Afdeling Informatie, Systemen en Algoritmiek e-mail: C.Roos@ewi.tudelft.nl
Discrete (and Continuous) Optimization WI4 131 Kees Roos Technische Universiteit Delft Faculteit Electrotechniek, Wiskunde en Informatica Afdeling Informatie, Systemen en Algoritmiek e-mail: C.Roos@ewi.tudelft.nl
Discrete Optimization 2010 Lecture 2 Matroids & Shortest Paths
 Matroids Shortest Paths Discrete Optimization 2010 Lecture 2 Matroids & Shortest Paths Marc Uetz University of Twente m.uetz@utwente.nl Lecture 2: sheet 1 / 25 Marc Uetz Discrete Optimization Matroids
Matroids Shortest Paths Discrete Optimization 2010 Lecture 2 Matroids & Shortest Paths Marc Uetz University of Twente m.uetz@utwente.nl Lecture 2: sheet 1 / 25 Marc Uetz Discrete Optimization Matroids
Algorithm Design and Analysis
 Algorithm Design and Analysis LECTURE 5 Greedy Algorithms Interval Scheduling Interval Partitioning Guest lecturer: Martin Furer Review In a DFS tree of an undirected graph, can there be an edge (u,v)
Algorithm Design and Analysis LECTURE 5 Greedy Algorithms Interval Scheduling Interval Partitioning Guest lecturer: Martin Furer Review In a DFS tree of an undirected graph, can there be an edge (u,v)
Algorithm Design and Analysis
 Algorithm Design and Analysis LECTURE 6 Greedy Algorithms Interval Scheduling Interval Partitioning Scheduling to Minimize Lateness Sofya Raskhodnikova S. Raskhodnikova; based on slides by E. Demaine,
Algorithm Design and Analysis LECTURE 6 Greedy Algorithms Interval Scheduling Interval Partitioning Scheduling to Minimize Lateness Sofya Raskhodnikova S. Raskhodnikova; based on slides by E. Demaine,
MAS210 Graph Theory Exercises 5 Solutions (1) v 5 (1)
 v 5 (1)") MAS210 Graph Theor Exercises 5 Solutions Q1 Consider the following directed network N. x 3 (3) v 1 2 (2) v 2 5 (2) 2(2) 1 (0) 3 (0) 2 (0) 3 (0) 3 2 (2) 2(0) v v 5 1 v 6 The numbers in brackets define an
MAS210 Graph Theor Exercises 5 Solutions Q1 Consider the following directed network N. x 3 (3) v 1 2 (2) v 2 5 (2) 2(2) 1 (0) 3 (0) 2 (0) 3 (0) 3 2 (2) 2(0) v v 5 1 v 6 The numbers in brackets define an
4 Sequencing problem with heads and tails
 4 Sequencing problem with heads and tails In what follows, we take a step towards multiple stage problems Therefore, we consider a single stage where a scheduling sequence has to be determined but each
4 Sequencing problem with heads and tails In what follows, we take a step towards multiple stage problems Therefore, we consider a single stage where a scheduling sequence has to be determined but each
Greedy Algorithms. CSE 101: Design and Analysis of Algorithms Lecture 10
 Greedy Algorithms CSE 101: Design and Analysis of Algorithms Lecture 10 CSE 101: Design and analysis of algorithms Greedy algorithms Reading: Kleinberg and Tardos, sections 4.1, 4.2, and 4.3 Homework 4
Greedy Algorithms CSE 101: Design and Analysis of Algorithms Lecture 10 CSE 101: Design and analysis of algorithms Greedy algorithms Reading: Kleinberg and Tardos, sections 4.1, 4.2, and 4.3 Homework 4
Dynamic Programming. Data Structures and Algorithms Andrei Bulatov
 Dynamic Programming Data Structures and Algorithms Andrei Bulatov Algorithms Dynamic Programming 18-2 Weighted Interval Scheduling Weighted interval scheduling problem. Instance A set of n jobs. Job j
Dynamic Programming Data Structures and Algorithms Andrei Bulatov Algorithms Dynamic Programming 18-2 Weighted Interval Scheduling Weighted interval scheduling problem. Instance A set of n jobs. Job j
Graphs and Network Flows IE411. Lecture 12. Dr. Ted Ralphs
 Graphs and Network Flows IE411 Lecture 12 Dr. Ted Ralphs IE411 Lecture 12 1 References for Today s Lecture Required reading Sections 21.1 21.2 References AMO Chapter 6 CLRS Sections 26.1 26.2 IE411 Lecture
Graphs and Network Flows IE411 Lecture 12 Dr. Ted Ralphs IE411 Lecture 12 1 References for Today s Lecture Required reading Sections 21.1 21.2 References AMO Chapter 6 CLRS Sections 26.1 26.2 IE411 Lecture
CS781 Lecture 3 January 27, 2011
 CS781 Lecture 3 January 7, 011 Greedy Algorithms Topics: Interval Scheduling and Partitioning Dijkstra s Shortest Path Algorithm Minimum Spanning Trees Single-Link k-clustering Interval Scheduling Interval
CS781 Lecture 3 January 7, 011 Greedy Algorithms Topics: Interval Scheduling and Partitioning Dijkstra s Shortest Path Algorithm Minimum Spanning Trees Single-Link k-clustering Interval Scheduling Interval
Friday, September 21, Flows
 Flows Building evacuation plan people to evacuate from the offices corridors and stairways capacity 10 10 5 50 15 15 15 60 60 50 15 10 60 10 60 15 15 50 For each person determine the path to follow to
Flows Building evacuation plan people to evacuate from the offices corridors and stairways capacity 10 10 5 50 15 15 15 60 60 50 15 10 60 10 60 15 15 50 For each person determine the path to follow to
On Machine Dependency in Shop Scheduling
 On Machine Dependency in Shop Scheduling Evgeny Shchepin Nodari Vakhania Abstract One of the main restrictions in scheduling problems are the machine (resource) restrictions: each machine can perform at
On Machine Dependency in Shop Scheduling Evgeny Shchepin Nodari Vakhania Abstract One of the main restrictions in scheduling problems are the machine (resource) restrictions: each machine can perform at
Clock-driven scheduling
 Clock-driven scheduling Also known as static or off-line scheduling Michal Sojka Czech Technical University in Prague, Faculty of Electrical Engineering, Department of Control Engineering November 8, 2017
Clock-driven scheduling Also known as static or off-line scheduling Michal Sojka Czech Technical University in Prague, Faculty of Electrical Engineering, Department of Control Engineering November 8, 2017
Abstract. 1 Introduction
 The max-plus algebra approach to railway timetable design R.M.P. Goverde Faculty of Civil Engineering and Geo Sciences, Delft University o/ Tec/mob^ f 0 Boz ^% ggoo G^ De% 7/^e A^e^er/a^^ email: goverde@ct.tudelft.nl
The max-plus algebra approach to railway timetable design R.M.P. Goverde Faculty of Civil Engineering and Geo Sciences, Delft University o/ Tec/mob^ f 0 Boz ^% ggoo G^ De% 7/^e A^e^er/a^^ email: goverde@ct.tudelft.nl
Algorithm Design Strategies V
 Algorithm Design Strategies V Joaquim Madeira Version 0.0 October 2016 U. Aveiro, October 2016 1 Overview The 0-1 Knapsack Problem Revisited The Fractional Knapsack Problem Greedy Algorithms Example Coin
Algorithm Design Strategies V Joaquim Madeira Version 0.0 October 2016 U. Aveiro, October 2016 1 Overview The 0-1 Knapsack Problem Revisited The Fractional Knapsack Problem Greedy Algorithms Example Coin
12. LOCAL SEARCH. gradient descent Metropolis algorithm Hopfield neural networks maximum cut Nash equilibria
 12. LOCAL SEARCH gradient descent Metropolis algorithm Hopfield neural networks maximum cut Nash equilibria Lecture slides by Kevin Wayne Copyright 2005 Pearson-Addison Wesley h ttp://www.cs.princeton.edu/~wayne/kleinberg-tardos
12. LOCAL SEARCH gradient descent Metropolis algorithm Hopfield neural networks maximum cut Nash equilibria Lecture slides by Kevin Wayne Copyright 2005 Pearson-Addison Wesley h ttp://www.cs.princeton.edu/~wayne/kleinberg-tardos
Embedded Systems 15. REVIEW: Aperiodic scheduling. C i J i 0 a i s i f i d i
 Embedded Systems 15-1 - REVIEW: Aperiodic scheduling C i J i 0 a i s i f i d i Given: A set of non-periodic tasks {J 1,, J n } with arrival times a i, deadlines d i, computation times C i precedence constraints
Embedded Systems 15-1 - REVIEW: Aperiodic scheduling C i J i 0 a i s i f i d i Given: A set of non-periodic tasks {J 1,, J n } with arrival times a i, deadlines d i, computation times C i precedence constraints
Contents college 5 and 6 Branch and Bound; Beam Search (Chapter , book)! general introduction
! general introduction") Contents college 5 and 6 Branch and Bound; Beam Search (Chapter 3.4-3.5, book)! general introduction Job Shop Scheduling (Chapter 5.1-5.3, book) ffl branch and bound (5.2) ffl shifting bottleneck heuristic
Contents college 5 and 6 Branch and Bound; Beam Search (Chapter 3.4-3.5, book)! general introduction Job Shop Scheduling (Chapter 5.1-5.3, book) ffl branch and bound (5.2) ffl shifting bottleneck heuristic
Lecture 13: Polynomial-Time Algorithms for Min Cost Flows. (Reading: AM&O Chapter 10)
") Lecture 1: Polynomial-Time Algorithms for Min Cost Flows (Reading: AM&O Chapter 1) Polynomial Algorithms for Min Cost Flows Improvements on the two algorithms for min cost flow: Successive Shortest Path
Lecture 1: Polynomial-Time Algorithms for Min Cost Flows (Reading: AM&O Chapter 1) Polynomial Algorithms for Min Cost Flows Improvements on the two algorithms for min cost flow: Successive Shortest Path
Robust optimization for resource-constrained project scheduling with uncertain activity durations
 Robust optimization for resource-constrained project scheduling with uncertain activity durations Christian Artigues 1, Roel Leus 2 and Fabrice Talla Nobibon 2 1 LAAS-CNRS, Université de Toulouse, France
Robust optimization for resource-constrained project scheduling with uncertain activity durations Christian Artigues 1, Roel Leus 2 and Fabrice Talla Nobibon 2 1 LAAS-CNRS, Université de Toulouse, France
Single Machine Models
 Outline DM87 SCHEDULING, TIMETABLING AND ROUTING Lecture 8 Single Machine Models 1. Dispatching Rules 2. Single Machine Models Marco Chiarandini DM87 Scheduling, Timetabling and Routing 2 Outline Dispatching
Outline DM87 SCHEDULING, TIMETABLING AND ROUTING Lecture 8 Single Machine Models 1. Dispatching Rules 2. Single Machine Models Marco Chiarandini DM87 Scheduling, Timetabling and Routing 2 Outline Dispatching
Math 5490 Network Flows
 Math 90 Network Flows Lecture 8: Flow Decomposition Algorithm Stephen Billups University of Colorado at Denver Math 90Network Flows p./6 Flow Decomposition Algorithms Two approaches to modeling network
Math 90 Network Flows Lecture 8: Flow Decomposition Algorithm Stephen Billups University of Colorado at Denver Math 90Network Flows p./6 Flow Decomposition Algorithms Two approaches to modeling network
Solutions to Exercises
 1/13 Solutions to Exercises The exercises referred to as WS 1.1(a), and so forth, are from the course book: Williamson and Shmoys, The Design of Approximation Algorithms, Cambridge University Press, 2011,
1/13 Solutions to Exercises The exercises referred to as WS 1.1(a), and so forth, are from the course book: Williamson and Shmoys, The Design of Approximation Algorithms, Cambridge University Press, 2011,
CS 410/584, Algorithm Design & Analysis, Lecture Notes 4
 CS 0/58,, Biconnectivity Let G = (N,E) be a connected A node a N is an articulation point if there are v and w different from a such that every path from 0 9 8 3 5 7 6 David Maier Biconnected Component
CS 0/58,, Biconnectivity Let G = (N,E) be a connected A node a N is an articulation point if there are v and w different from a such that every path from 0 9 8 3 5 7 6 David Maier Biconnected Component
A Branch and Bound Algorithm for the Project Duration Problem Subject to Temporal and Cumulative Resource Constraints
 A Branch and Bound Algorithm for the Project Duration Problem Subject to Temporal and Cumulative Resource Constraints Christoph Schwindt Institut für Wirtschaftstheorie und Operations Research University
A Branch and Bound Algorithm for the Project Duration Problem Subject to Temporal and Cumulative Resource Constraints Christoph Schwindt Institut für Wirtschaftstheorie und Operations Research University
CS 374: Algorithms & Models of Computation, Spring 2017 Greedy Algorithms Lecture 19 April 4, 2017 Chandra Chekuri (UIUC) CS374 1 Spring / 1
 CS374 1 Spring / 1") CS 374: Algorithms & Models of Computation, Spring 2017 Greedy Algorithms Lecture 19 April 4, 2017 Chandra Chekuri (UIUC) CS374 1 Spring 2017 1 / 1 Part I Greedy Algorithms: Tools and Techniques Chandra
CS 374: Algorithms & Models of Computation, Spring 2017 Greedy Algorithms Lecture 19 April 4, 2017 Chandra Chekuri (UIUC) CS374 1 Spring 2017 1 / 1 Part I Greedy Algorithms: Tools and Techniques Chandra
Discrete Optimization 2010 Lecture 3 Maximum Flows
 Remainder: Shortest Paths Maximum Flows Discrete Optimization 2010 Lecture 3 Maximum Flows Marc Uetz University of Twente m.uetz@utwente.nl Lecture 3: sheet 1 / 29 Marc Uetz Discrete Optimization Outline
Remainder: Shortest Paths Maximum Flows Discrete Optimization 2010 Lecture 3 Maximum Flows Marc Uetz University of Twente m.uetz@utwente.nl Lecture 3: sheet 1 / 29 Marc Uetz Discrete Optimization Outline
On bilevel machine scheduling problems
 Noname manuscript No. (will be inserted by the editor) On bilevel machine scheduling problems Tamás Kis András Kovács Abstract Bilevel scheduling problems constitute a hardly studied area of scheduling
Noname manuscript No. (will be inserted by the editor) On bilevel machine scheduling problems Tamás Kis András Kovács Abstract Bilevel scheduling problems constitute a hardly studied area of scheduling
GRAPH ALGORITHMS Week 3 (16-21 October 2017)
") GRAPH ALGORITHMS Week 3 (16-21 October 2017) C. Croitoru croitoru@info.uaic.ro FII October 15, 2017 1 / 63 OUTLINE Graph Theory Vocabulary 1 Definition of a Graph 2 Variations in the Definition of a Graph
GRAPH ALGORITHMS Week 3 (16-21 October 2017) C. Croitoru croitoru@info.uaic.ro FII October 15, 2017 1 / 63 OUTLINE Graph Theory Vocabulary 1 Definition of a Graph 2 Variations in the Definition of a Graph
CMPSCI611: The Matroid Theorem Lecture 5
 CMPSCI611: The Matroid Theorem Lecture 5 We first review our definitions: A subset system is a set E together with a set of subsets of E, called I, such that I is closed under inclusion. This means that
CMPSCI611: The Matroid Theorem Lecture 5 We first review our definitions: A subset system is a set E together with a set of subsets of E, called I, such that I is closed under inclusion. This means that
Theoretical Computer Science
 Theoretical Computer Science 411 (010) 417 44 Contents lists available at ScienceDirect Theoretical Computer Science journal homepage: wwwelseviercom/locate/tcs Resource allocation with time intervals
Theoretical Computer Science 411 (010) 417 44 Contents lists available at ScienceDirect Theoretical Computer Science journal homepage: wwwelseviercom/locate/tcs Resource allocation with time intervals
Maximum flow problem (part I)
") Maximum flow problem (part I) Combinatorial Optimization Giovanni Righini Università degli Studi di Milano Definitions A flow network is a digraph D = (N,A) with two particular nodes s and t acting as
Maximum flow problem (part I) Combinatorial Optimization Giovanni Righini Università degli Studi di Milano Definitions A flow network is a digraph D = (N,A) with two particular nodes s and t acting as
Introduction to Algorithms
 Introduction to Algorithms 6.046J/8.40J/SMA550 Lecture 7 Prof. Erik Demaine Paths in graphs Consider a digraph G = (V, E) with edge-weight function w : E R. The weight of path p = v v L v k is defined
Introduction to Algorithms 6.046J/8.40J/SMA550 Lecture 7 Prof. Erik Demaine Paths in graphs Consider a digraph G = (V, E) with edge-weight function w : E R. The weight of path p = v v L v k is defined
CS 580: Algorithm Design and Analysis
 CS 580: Algorithm Design and Analysis Jeremiah Blocki Purdue University Spring 2018 Announcement: Homework 1 due soon! Due: January 25 th at midnight (Blackboard) Recap: Graphs Bipartite Graphs Definition
CS 580: Algorithm Design and Analysis Jeremiah Blocki Purdue University Spring 2018 Announcement: Homework 1 due soon! Due: January 25 th at midnight (Blackboard) Recap: Graphs Bipartite Graphs Definition
Discrete Optimization
 Prof. Friedrich Eisenbrand Martin Niemeier Due Date: April 15, 2010 Discussions: March 25, April 01 Discrete Optimization Spring 2010 s 3 You can hand in written solutions for up to two of the exercises
Prof. Friedrich Eisenbrand Martin Niemeier Due Date: April 15, 2010 Discussions: March 25, April 01 Discrete Optimization Spring 2010 s 3 You can hand in written solutions for up to two of the exercises
5 Integer Linear Programming (ILP) E. Amaldi Foundations of Operations Research Politecnico di Milano 1
 E. Amaldi Foundations of Operations Research Politecnico di Milano 1") 5 Integer Linear Programming (ILP) E. Amaldi Foundations of Operations Research Politecnico di Milano 1 Definition: An Integer Linear Programming problem is an optimization problem of the form (ILP) min
5 Integer Linear Programming (ILP) E. Amaldi Foundations of Operations Research Politecnico di Milano 1 Definition: An Integer Linear Programming problem is an optimization problem of the form (ILP) min
Single Source Shortest Paths
 CMPS 00 Fall 015 Single Source Shortest Paths Carola Wenk Slides courtesy of Charles Leiserson with changes and additions by Carola Wenk 1 Paths in graphs Consider a digraph G = (V, E) with an edge-weight
CMPS 00 Fall 015 Single Source Shortest Paths Carola Wenk Slides courtesy of Charles Leiserson with changes and additions by Carola Wenk 1 Paths in graphs Consider a digraph G = (V, E) with an edge-weight
BRANCH-AND-BOUND ALGORITHMS FOR STOCHASTIC RESOURCE-CONSTRAINED PROJECT SCHEDULING
 FACHBEREICH 3 MATHEMATIK BRANCH-AND-BOUND ALGORITHMS FOR STOCHASTIC RESOURCE-CONSTRAINED PROJECT SCHEDULING by FREDERIK STORK No. 702/2000 Branch-and-Bound Algorithms for Stochastic Resource-Constrained
FACHBEREICH 3 MATHEMATIK BRANCH-AND-BOUND ALGORITHMS FOR STOCHASTIC RESOURCE-CONSTRAINED PROJECT SCHEDULING by FREDERIK STORK No. 702/2000 Branch-and-Bound Algorithms for Stochastic Resource-Constrained
Chapter 11. Approximation Algorithms. Slides by Kevin Wayne Pearson-Addison Wesley. All rights reserved.
 Chapter 11 Approximation Algorithms Slides by Kevin Wayne. Copyright @ 2005 Pearson-Addison Wesley. All rights reserved. 1 Approximation Algorithms Q. Suppose I need to solve an NP-hard problem. What should
Chapter 11 Approximation Algorithms Slides by Kevin Wayne. Copyright @ 2005 Pearson-Addison Wesley. All rights reserved. 1 Approximation Algorithms Q. Suppose I need to solve an NP-hard problem. What should
Semi-Simultaneous Flows and Binary Constrained (Integer) Linear Programs
 Linear Programs") DEPARTMENT OF MATHEMATICAL SCIENCES Clemson University, South Carolina, USA Technical Report TR2006 07 EH Semi-Simultaneous Flows and Binary Constrained (Integer Linear Programs A. Engau and H. W. Hamacher
DEPARTMENT OF MATHEMATICAL SCIENCES Clemson University, South Carolina, USA Technical Report TR2006 07 EH Semi-Simultaneous Flows and Binary Constrained (Integer Linear Programs A. Engau and H. W. Hamacher
Multi-Skill Resource-Constrained Project Scheduling: Formulation and Inequalities
 Multi-Skill Resource-Constrained Project Scheduling: Formulation and Inequalities Isabel Correia, Lídia Lampreia Lourenço and Francisco Saldanha-da-Gama CIO Working Paper 17/2008 Multi-Skill Resource-Constrained
Multi-Skill Resource-Constrained Project Scheduling: Formulation and Inequalities Isabel Correia, Lídia Lampreia Lourenço and Francisco Saldanha-da-Gama CIO Working Paper 17/2008 Multi-Skill Resource-Constrained
Embedded Systems 14. Overview of embedded systems design
 Embedded Systems 14-1 - Overview of embedded systems design - 2-1 Point of departure: Scheduling general IT systems In general IT systems, not much is known about the computational processes a priori The
Embedded Systems 14-1 - Overview of embedded systems design - 2-1 Point of departure: Scheduling general IT systems In general IT systems, not much is known about the computational processes a priori The
Streaming Algorithms for Submodular Function Maximization
 Streaming Algorithms for Submodular Function Maximization Chandra Chekuri Shalmoli Gupta Kent Quanrud University of Illinois at Urbana-Champaign October 6, 2015 Submodular functions f : 2 N R if S T N,
Streaming Algorithms for Submodular Function Maximization Chandra Chekuri Shalmoli Gupta Kent Quanrud University of Illinois at Urbana-Champaign October 6, 2015 Submodular functions f : 2 N R if S T N,
INVERSE SPANNING TREE PROBLEMS: FORMULATIONS AND ALGORITHMS
 INVERSE SPANNING TREE PROBLEMS: FORMULATIONS AND ALGORITHMS P. T. Sokkalingam Department of Mathematics Indian Institute of Technology, Kanpur-208 016, INDIA Ravindra K. Ahuja Dept. of Industrial & Management
INVERSE SPANNING TREE PROBLEMS: FORMULATIONS AND ALGORITHMS P. T. Sokkalingam Department of Mathematics Indian Institute of Technology, Kanpur-208 016, INDIA Ravindra K. Ahuja Dept. of Industrial & Management
CSE101: Design and Analysis of Algorithms. Ragesh Jaiswal, CSE, UCSD
 Course Overview Material that will be covered in the course: Basic graph algorithms Algorithm Design Techniques Greedy Algorithms Divide and Conquer Dynamic Programming Network Flows Computational intractability
Course Overview Material that will be covered in the course: Basic graph algorithms Algorithm Design Techniques Greedy Algorithms Divide and Conquer Dynamic Programming Network Flows Computational intractability
A scheme developed by Du Pont to figure out
 CPM Project Management scheme. A scheme developed by Du Pont to figure out Length of a normal project schedule given task durations and their precedence in a network type layout (or Gantt chart) Two examples
CPM Project Management scheme. A scheme developed by Du Pont to figure out Length of a normal project schedule given task durations and their precedence in a network type layout (or Gantt chart) Two examples
Undirected Graphs. V = { 1, 2, 3, 4, 5, 6, 7, 8 } E = { 1-2, 1-3, 2-3, 2-4, 2-5, 3-5, 3-7, 3-8, 4-5, 5-6 } n = 8 m = 11
 Undirected Graphs Undirected graph. G = (V, E) V = nodes. E = edges between pairs of nodes. Captures pairwise relationship between objects. Graph size parameters: n = V, m = E. V = {, 2, 3,,,, 7, 8 } E
Undirected Graphs Undirected graph. G = (V, E) V = nodes. E = edges between pairs of nodes. Captures pairwise relationship between objects. Graph size parameters: n = V, m = E. V = {, 2, 3,,,, 7, 8 } E
Subcubic Equivalence of Triangle Detection and Matrix Multiplication
 Subcubic Equivalence of Triangle Detection and Matrix Multiplication Bahar Qarabaqi and Maziar Gomrokchi April 29, 2011 1 Introduction An algorithm on n n matrix with the entries in [ M, M] has a truly
Subcubic Equivalence of Triangle Detection and Matrix Multiplication Bahar Qarabaqi and Maziar Gomrokchi April 29, 2011 1 Introduction An algorithm on n n matrix with the entries in [ M, M] has a truly
Vehicle Routing and Scheduling. Martin Savelsbergh The Logistics Institute Georgia Institute of Technology
 Vehicle Routing and Scheduling Martin Savelsbergh The Logistics Institute Georgia Institute of Technology Vehicle Routing and Scheduling Part II: Algorithmic Enhancements Handling Practical Complexities
Vehicle Routing and Scheduling Martin Savelsbergh The Logistics Institute Georgia Institute of Technology Vehicle Routing and Scheduling Part II: Algorithmic Enhancements Handling Practical Complexities
SINGLE MACHINE SEQUENCING Part 2. ISE480 Sequencing and Scheduling Fall semestre
 SINGLE MACHINE SEQUENCING Part 2 2011 2012 Fall semestre Minimizing Total Weighted Flowtime In a common variation of the F-problem, obs do not have equal importance. One way of distinguishing the obs is
SINGLE MACHINE SEQUENCING Part 2 2011 2012 Fall semestre Minimizing Total Weighted Flowtime In a common variation of the F-problem, obs do not have equal importance. One way of distinguishing the obs is
Applied Integer Programming: Modeling and Solution
 Applied Integer Programming: Modeling and Solution Chen, Batson, Dang Section 6. - 6.3 Blekinge Institute of Technology April 5, 05 Modeling Combinatorical Optimization Problems II Traveling Salesman Problem
Applied Integer Programming: Modeling and Solution Chen, Batson, Dang Section 6. - 6.3 Blekinge Institute of Technology April 5, 05 Modeling Combinatorical Optimization Problems II Traveling Salesman Problem
An Õ m 2 n Randomized Algorithm to compute a Minimum Cycle Basis of a Directed Graph
 An Õ m 2 n Randomized Algorithm to compute a Minimum Cycle Basis of a Directed Graph T Kavitha Indian Institute of Science Bangalore, India kavitha@csaiiscernetin Abstract We consider the problem of computing
An Õ m 2 n Randomized Algorithm to compute a Minimum Cycle Basis of a Directed Graph T Kavitha Indian Institute of Science Bangalore, India kavitha@csaiiscernetin Abstract We consider the problem of computing
Representations of All Solutions of Boolean Programming Problems
 Representations of All Solutions of Boolean Programming Problems Utz-Uwe Haus and Carla Michini Institute for Operations Research Department of Mathematics ETH Zurich Rämistr. 101, 8092 Zürich, Switzerland
Representations of All Solutions of Boolean Programming Problems Utz-Uwe Haus and Carla Michini Institute for Operations Research Department of Mathematics ETH Zurich Rämistr. 101, 8092 Zürich, Switzerland
Real-Time Systems. Event-Driven Scheduling
 Real-Time Systems Event-Driven Scheduling Hermann Härtig WS 2018/19 Outline mostly following Jane Liu, Real-Time Systems Principles Scheduling EDF and LST as dynamic scheduling methods Fixed Priority schedulers
Real-Time Systems Event-Driven Scheduling Hermann Härtig WS 2018/19 Outline mostly following Jane Liu, Real-Time Systems Principles Scheduling EDF and LST as dynamic scheduling methods Fixed Priority schedulers
Core Mathematics C1 (AS) Unit C1
 Unit C1") Core Mathematics C1 (AS) Unit C1 Algebraic manipulation of polynomials, including expanding brackets and collecting like terms, factorisation. Graphs of functions; sketching curves defined by simple equations.
Core Mathematics C1 (AS) Unit C1 Algebraic manipulation of polynomials, including expanding brackets and collecting like terms, factorisation. Graphs of functions; sketching curves defined by simple equations.
3.4 Relaxations and bounds
 3.4 Relaxations and bounds Consider a generic Discrete Optimization problem z = min{c(x) : x X} with an optimal solution x X. In general, the algorithms generate not only a decreasing sequence of upper
3.4 Relaxations and bounds Consider a generic Discrete Optimization problem z = min{c(x) : x X} with an optimal solution x X. In general, the algorithms generate not only a decreasing sequence of upper
Discrete (and Continuous) Optimization Solutions of Exercises 2 WI4 131
 Optimization Solutions of Exercises 2 WI4 131") Discrete (and Continuous) Optimization Solutions of Exercises 2 WI4 131 Kees Roos Technische Universiteit Delft Faculteit Electrotechniek, Wiskunde en Informatica Afdeling Informatie, Systemen en Algoritmiek
Discrete (and Continuous) Optimization Solutions of Exercises 2 WI4 131 Kees Roos Technische Universiteit Delft Faculteit Electrotechniek, Wiskunde en Informatica Afdeling Informatie, Systemen en Algoritmiek
Chapter 3, Operations Research (OR)
") Chapter 3, Operations Research (OR) Kent Andersen February 7, 2007 1 Linear Programs (continued) In the last chapter, we introduced the general form of a linear program, which we denote (P) Minimize Z
Chapter 3, Operations Research (OR) Kent Andersen February 7, 2007 1 Linear Programs (continued) In the last chapter, we introduced the general form of a linear program, which we denote (P) Minimize Z
Discrete Optimization 23
 Discrete Optimization 23 2 Total Unimodularity (TU) and Its Applications In this section we will discuss the total unimodularity theory and its applications to flows in networks. 2.1 Total Unimodularity:
Discrete Optimization 23 2 Total Unimodularity (TU) and Its Applications In this section we will discuss the total unimodularity theory and its applications to flows in networks. 2.1 Total Unimodularity:
More Approximation Algorithms
 CS 473: Algorithms, Spring 2018 More Approximation Algorithms Lecture 25 April 26, 2018 Most slides are courtesy Prof. Chekuri Ruta (UIUC) CS473 1 Spring 2018 1 / 28 Formal definition of approximation
CS 473: Algorithms, Spring 2018 More Approximation Algorithms Lecture 25 April 26, 2018 Most slides are courtesy Prof. Chekuri Ruta (UIUC) CS473 1 Spring 2018 1 / 28 Formal definition of approximation
Real-Time Systems. Event-Driven Scheduling
 Real-Time Systems Event-Driven Scheduling Marcus Völp, Hermann Härtig WS 2013/14 Outline mostly following Jane Liu, Real-Time Systems Principles Scheduling EDF and LST as dynamic scheduling methods Fixed
Real-Time Systems Event-Driven Scheduling Marcus Völp, Hermann Härtig WS 2013/14 Outline mostly following Jane Liu, Real-Time Systems Principles Scheduling EDF and LST as dynamic scheduling methods Fixed
How to deal with uncertainties and dynamicity?
 How to deal with uncertainties and dynamicity? http://graal.ens-lyon.fr/ lmarchal/scheduling/ 19 novembre 2012 1/ 37 Outline 1 Sensitivity and Robustness 2 Analyzing the sensitivity : the case of Backfilling
How to deal with uncertainties and dynamicity? http://graal.ens-lyon.fr/ lmarchal/scheduling/ 19 novembre 2012 1/ 37 Outline 1 Sensitivity and Robustness 2 Analyzing the sensitivity : the case of Backfilling
Max Flow: Algorithms and Applications
 Max Flow: Algorithms and Applications Outline for today Quick review of the Max Flow problem Applications of Max Flow The Ford-Fulkerson (FF) algorithm for Max Flow Analysis of FF, and the Max Flow Min
Max Flow: Algorithms and Applications Outline for today Quick review of the Max Flow problem Applications of Max Flow The Ford-Fulkerson (FF) algorithm for Max Flow Analysis of FF, and the Max Flow Min
Lecture 3. 1 Polynomial-time algorithms for the maximum flow problem
 ORIE 633 Network Flows August 30, 2007 Lecturer: David P. Williamson Lecture 3 Scribe: Gema Plaza-Martínez 1 Polynomial-time algorithms for the maximum flow problem 1.1 Introduction Let s turn now to considering
ORIE 633 Network Flows August 30, 2007 Lecturer: David P. Williamson Lecture 3 Scribe: Gema Plaza-Martínez 1 Polynomial-time algorithms for the maximum flow problem 1.1 Introduction Let s turn now to considering
Relation of Pure Minimum Cost Flow Model to Linear Programming
 Appendix A Page 1 Relation of Pure Minimum Cost Flow Model to Linear Programming The Network Model The network pure minimum cost flow model has m nodes. The external flows given by the vector b with m
Appendix A Page 1 Relation of Pure Minimum Cost Flow Model to Linear Programming The Network Model The network pure minimum cost flow model has m nodes. The external flows given by the vector b with m
Average-Case Performance Analysis of Online Non-clairvoyant Scheduling of Parallel Tasks with Precedence Constraints
 Average-Case Performance Analysis of Online Non-clairvoyant Scheduling of Parallel Tasks with Precedence Constraints Keqin Li Department of Computer Science State University of New York New Paltz, New
Average-Case Performance Analysis of Online Non-clairvoyant Scheduling of Parallel Tasks with Precedence Constraints Keqin Li Department of Computer Science State University of New York New Paltz, New
All-norm Approximation Algorithms
 All-norm Approximation Algorithms Yossi Azar Leah Epstein Yossi Richter Gerhard J. Woeginger Abstract A major drawback in optimization problems and in particular in scheduling problems is that for every
All-norm Approximation Algorithms Yossi Azar Leah Epstein Yossi Richter Gerhard J. Woeginger Abstract A major drawback in optimization problems and in particular in scheduling problems is that for every
Multicommodity Flows and Column Generation
 Lecture Notes Multicommodity Flows and Column Generation Marc Pfetsch Zuse Institute Berlin pfetsch@zib.de last change: 2/8/2006 Technische Universität Berlin Fakultät II, Institut für Mathematik WS 2006/07
Lecture Notes Multicommodity Flows and Column Generation Marc Pfetsch Zuse Institute Berlin pfetsch@zib.de last change: 2/8/2006 Technische Universität Berlin Fakultät II, Institut für Mathematik WS 2006/07
Linear programming I João Carlos Lourenço
 Decision Support Models Linear programming I João Carlos Lourenço joao.lourenco@ist.utl.pt Academic year 2012/2013 Readings: Hillier, F.S., Lieberman, G.J., 2010. Introduction to Operations Research, 9th
Decision Support Models Linear programming I João Carlos Lourenço joao.lourenco@ist.utl.pt Academic year 2012/2013 Readings: Hillier, F.S., Lieberman, G.J., 2010. Introduction to Operations Research, 9th
Introduction 1.1 PROBLEM FORMULATION
 Introduction. PROBLEM FORMULATION This book deals with a single type of network optimization problem with linear cost, known as the transshipment or minimum cost flow problem. In this section, we formulate
Introduction. PROBLEM FORMULATION This book deals with a single type of network optimization problem with linear cost, known as the transshipment or minimum cost flow problem. In this section, we formulate
2. Project management
 2. Project management In what follows, we consider production processes where only a single item of a specific product is produced in the planning horizon In this case specific instruments for planning
2. Project management In what follows, we consider production processes where only a single item of a specific product is produced in the planning horizon In this case specific instruments for planning
CMPS 6610 Fall 2018 Shortest Paths Carola Wenk
 CMPS 6610 Fall 018 Shortest Paths Carola Wenk Slides courtesy of Charles Leiserson with changes and additions by Carola Wenk Paths in graphs Consider a digraph G = (V, E) with an edge-weight function w
CMPS 6610 Fall 018 Shortest Paths Carola Wenk Slides courtesy of Charles Leiserson with changes and additions by Carola Wenk Paths in graphs Consider a digraph G = (V, E) with an edge-weight function w
Solving Dual Problems
 Lecture 20 Solving Dual Problems We consider a constrained problem where, in addition to the constraint set X, there are also inequality and linear equality constraints. Specifically the minimization problem
Lecture 20 Solving Dual Problems We consider a constrained problem where, in addition to the constraint set X, there are also inequality and linear equality constraints. Specifically the minimization problem
Computers and Mathematics with Applications. Project management for arbitrary random durations and cost attributes by applying network approaches
 Computers and Mathematics with Applications 56 (2008) 2650 2655 Contents lists available at ScienceDirect Computers and Mathematics with Applications journal homepage: www.elsevier.com/locate/camwa Project
Computers and Mathematics with Applications 56 (2008) 2650 2655 Contents lists available at ScienceDirect Computers and Mathematics with Applications journal homepage: www.elsevier.com/locate/camwa Project
Advances in processor, memory, and communication technologies
 Discrete and continuous min-energy schedules for variable voltage processors Minming Li, Andrew C. Yao, and Frances F. Yao Department of Computer Sciences and Technology and Center for Advanced Study,
Discrete and continuous min-energy schedules for variable voltage processors Minming Li, Andrew C. Yao, and Frances F. Yao Department of Computer Sciences and Technology and Center for Advanced Study,
Simple Dispatch Rules
 Simple Dispatch Rules We will first look at some simple dispatch rules: algorithms for which the decision about which job to run next is made based on the jobs and the time (but not on the history of jobs
Simple Dispatch Rules We will first look at some simple dispatch rules: algorithms for which the decision about which job to run next is made based on the jobs and the time (but not on the history of jobs
CSE 431/531: Analysis of Algorithms. Dynamic Programming. Lecturer: Shi Li. Department of Computer Science and Engineering University at Buffalo
 CSE 431/531: Analysis of Algorithms Dynamic Programming Lecturer: Shi Li Department of Computer Science and Engineering University at Buffalo Paradigms for Designing Algorithms Greedy algorithm Make a
CSE 431/531: Analysis of Algorithms Dynamic Programming Lecturer: Shi Li Department of Computer Science and Engineering University at Buffalo Paradigms for Designing Algorithms Greedy algorithm Make a
Integer Linear Programming (ILP)
") Integer Linear Programming (ILP) Zdeněk Hanzálek, Přemysl Šůcha hanzalek@fel.cvut.cz CTU in Prague March 8, 2017 Z. Hanzálek (CTU) Integer Linear Programming (ILP) March 8, 2017 1 / 43 Table of contents
Integer Linear Programming (ILP) Zdeněk Hanzálek, Přemysl Šůcha hanzalek@fel.cvut.cz CTU in Prague March 8, 2017 Z. Hanzálek (CTU) Integer Linear Programming (ILP) March 8, 2017 1 / 43 Table of contents
A neighborhood for complex job shop scheduling problems with regular objectives
 AUTHOR'S VERSION A neighborhood for complex job shop scheduling problems with regular objectives Reinhard Bürgy Accepted for publication in Journal of Scheduling (April 2017) The final publication is available
AUTHOR'S VERSION A neighborhood for complex job shop scheduling problems with regular objectives Reinhard Bürgy Accepted for publication in Journal of Scheduling (April 2017) The final publication is available
Using column generation to solve parallel machine scheduling problems with minmax objective functions
 Using column generation to solve parallel machine scheduling problems with minmax objective functions J.M. van den Akker J.A. Hoogeveen Department of Information and Computing Sciences Utrecht University
Using column generation to solve parallel machine scheduling problems with minmax objective functions J.M. van den Akker J.A. Hoogeveen Department of Information and Computing Sciences Utrecht University
CMPS 2200 Fall Carola Wenk Slides courtesy of Charles Leiserson with small changes by Carola Wenk. 10/8/12 CMPS 2200 Intro.
 CMPS 00 Fall 01 Single Source Shortest Paths Carola Wenk Slides courtesy of Charles Leiserson with small changes by Carola Wenk 1 Paths in graphs Consider a digraph G = (V, E) with edge-weight function
CMPS 00 Fall 01 Single Source Shortest Paths Carola Wenk Slides courtesy of Charles Leiserson with small changes by Carola Wenk 1 Paths in graphs Consider a digraph G = (V, E) with edge-weight function
UNIVERSITY OF YORK. MSc Examinations 2004 MATHEMATICS Networks. Time Allowed: 3 hours.
 UNIVERSITY OF YORK MSc Examinations 2004 MATHEMATICS Networks Time Allowed: 3 hours. Answer 4 questions. Standard calculators will be provided but should be unnecessary. 1 Turn over 2 continued on next
UNIVERSITY OF YORK MSc Examinations 2004 MATHEMATICS Networks Time Allowed: 3 hours. Answer 4 questions. Standard calculators will be provided but should be unnecessary. 1 Turn over 2 continued on next
Robust Local Search for Solving RCPSP/max with Durational Uncertainty
 Journal of Artificial Intelligence Research 43 (2012) 43-86 Submitted 07/11; published 01/12 Robust Local Search for Solving RCPSP/max with Durational Uncertainty Na Fu Hoong Chuin Lau Pradeep Varakantham
Journal of Artificial Intelligence Research 43 (2012) 43-86 Submitted 07/11; published 01/12 Robust Local Search for Solving RCPSP/max with Durational Uncertainty Na Fu Hoong Chuin Lau Pradeep Varakantham
Aperiodic Task Scheduling
 Aperiodic Task Scheduling Jian-Jia Chen (slides are based on Peter Marwedel) TU Dortmund, Informatik 12 Germany Springer, 2010 2017 年 11 月 29 日 These slides use Microsoft clip arts. Microsoft copyright
Aperiodic Task Scheduling Jian-Jia Chen (slides are based on Peter Marwedel) TU Dortmund, Informatik 12 Germany Springer, 2010 2017 年 11 月 29 日 These slides use Microsoft clip arts. Microsoft copyright
3.10 Lagrangian relaxation
 3.10 Lagrangian relaxation Consider a generic ILP problem min {c t x : Ax b, Dx d, x Z n } with integer coefficients. Suppose Dx d are the complicating constraints. Often the linear relaxation and the
3.10 Lagrangian relaxation Consider a generic ILP problem min {c t x : Ax b, Dx d, x Z n } with integer coefficients. Suppose Dx d are the complicating constraints. Often the linear relaxation and the
Marjan van den Akker. Han Hoogeveen Jules van Kempen
 Parallel machine scheduling through column generation: minimax objective functions, release dates, deadlines, and/or generalized precedence constraints Marjan van den Akker Han Hoogeveen Jules van Kempen
Parallel machine scheduling through column generation: minimax objective functions, release dates, deadlines, and/or generalized precedence constraints Marjan van den Akker Han Hoogeveen Jules van Kempen
1 Ordinary Load Balancing
 Comp 260: Advanced Algorithms Prof. Lenore Cowen Tufts University, Spring 208 Scribe: Emily Davis Lecture 8: Scheduling Ordinary Load Balancing Suppose we have a set of jobs each with their own finite
Comp 260: Advanced Algorithms Prof. Lenore Cowen Tufts University, Spring 208 Scribe: Emily Davis Lecture 8: Scheduling Ordinary Load Balancing Suppose we have a set of jobs each with their own finite
Introduction to Algorithms
 Introduction to Algorithms 6.046J/18.401J LECTURE 14 Shortest Paths I Properties of shortest paths Dijkstra s algorithm Correctness Analysis Breadth-first search Prof. Charles E. Leiserson Paths in graphs
Introduction to Algorithms 6.046J/18.401J LECTURE 14 Shortest Paths I Properties of shortest paths Dijkstra s algorithm Correctness Analysis Breadth-first search Prof. Charles E. Leiserson Paths in graphs
Technische Universität München, Zentrum Mathematik Lehrstuhl für Angewandte Geometrie und Diskrete Mathematik. Combinatorial Optimization (MA 4502)
") Technische Universität München, Zentrum Mathematik Lehrstuhl für Angewandte Geometrie und Diskrete Mathematik Combinatorial Optimization (MA 4502) Dr. Michael Ritter Problem Sheet 1 Homework Problems Exercise
Technische Universität München, Zentrum Mathematik Lehrstuhl für Angewandte Geometrie und Diskrete Mathematik Combinatorial Optimization (MA 4502) Dr. Michael Ritter Problem Sheet 1 Homework Problems Exercise