Objectives: We will learn about filters that are carried out in the frequency domain.
|
|
|
- Megan Short
- 5 years ago
- Views:
Transcription
1 Chapter Freqency Domain Processing Objectives: We will learn abot ilters that are carried ot in the reqency domain. In addition to being the base or linear iltering, Forier Transorm oers considerable lexibility in the design and implementation o iltering soltions in areas sch as image enhancement, image restoration, image data compression, and a some other applications. The reqency and spatial iltering can be combined to achieve reslts that are beyond what each can achieve individally. Forier Transorm Forier transorm o a nction x one-dimensional is: F j π x x e dx where j. We can obtain the x sing the inverse Forier Transorm. j π x F x F e d The two-dimensional version o this eqations are: F, v j π x vy x, y e dxdy And the inverse Forier Transorm or this one can be shown as: j π x vy x, y F, v e ddv
2 Discrete Forier Transorm To do any o these on a compter we need the discrete versions. For one dimensional case sppose we have M discrete points. In the two dimensional case, assme we have M and N discrete points in x and y directions respectively. One-dimensional: M F xi e M i 0 The inverse transorm is: j πx / M i or 0,,,3,..., M M x F i 0 i e j π x / M i or x 0,,,3,..., M 3
3 5 Two-dimensional: 0 0 / /,, M i N k N vy M x j k i k i e y x MN v F π Discrete Forier Transorm Where, x,y denotes the inpt image with: x 0,,,, M- and y 0,,,, N- representing the nmber o rows and colmns o the M-by-N image. The inverse transorm is: 0 0 / /,, M i N k N y v M x j k i k i e v F y x π Remember that we have: sin cos θ θ θ j e j Since images are -D arrays, we work with these two. 6 [ ],, tan, : Spectrm Phase,,,, : Spectrm Power,,, : Spectrm Forier / v R v I v v I v R v F v P v I v R v F φ Discrete Forier Transorm
4 What are they? The vale o the transormation at the origin o the reqency domain [I.e., F0,0] is called the dc component o the Forier Transorm. F0,0 is is eqal to MN times the average vale o x,y Even i x,y is real, it transormation in general is complex. To visally analyze a transorm, we need to compte its spectrm. I.e., compte the magnitde o the complex variable F, v and display it as an image. F,v can also be represented as: F, v F, v e jφ, v 7 Discrete Forier Transorm Example Compte the Forier transorm o the nction shown below: x,y A y Y X x 8
5 9 Example FFT Compte the FFT o x x. Let s only comptes or reqencies. 0,,,3,..., or 0 / M e x M F M i M x j i i π 3 0,,, or 3 0 / and e x F i x j i i π / 0 / 0 / 00 / e e e e F j j j j π π π π 0 j / 3 / 3 / / / 0 / π π π π π π π j j j j j j j e e e e e e e F F - F3 - - j

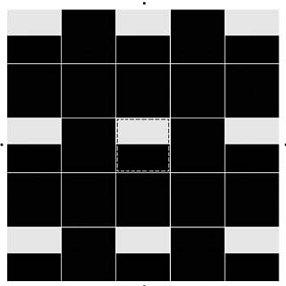
6 Example >> zeros5,5; >> 5:65,35:75; >> imshow Example - cont >> F t; >> F logabsf; >> imshowf


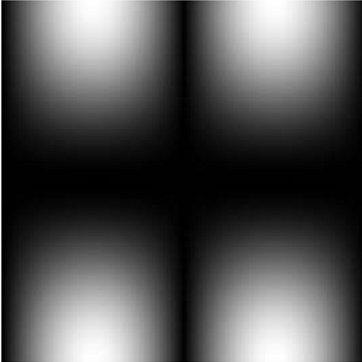
7 Example cont Centering the spectrm F t; F logabsf; imshowf or i :5 or j :5 i,j -^ij*i,j; end end F t; F logabsf; igre,imshowf 3 This is what happened

8 5 Filtering in the reqency domain In general, the ondation o linear iltering in both the spatial and reqency domains is the convoltion theorem: x, y h h, y H, v F, v Conversely, we will have: x, y h h, y H, v* G, v Here, the symbol * indicates convoltion o the two nctions, and the expression on sides o the doble arrow denotes Forier Transorm pair. We are interested in the irst one, where iltering in spatial domain consists o convolting an image x,y with a ilter mask, hx,y. Based on the convoltion theorem we can obtain the same reslt by mltiplying F,v by H,v, the Forier transorm o the spatial ilter. It is common to reer to H,v as the ilter transer nction. 6

9 Convoltion and Correlation Example: Occrrences o a letter in a text 7 Read the Original Image, Store it in array text Determine the size, Let s say p, q Read the image o the letter, Store it in an array l Determine the size, Let s say n, m Rotate the image o the letter by 80 Compte the FFT o the letter, pad it to the p, q size Compte the FFT o the text 8
10 Mltiply element-by-element the two Take the Real part o the reslt Mltiply element-by-element the two Find the MAX Threshold based on the MAX Display 9 Based on convoltion theorem: To obtain corresponding iltered image in the spatial domain we simply compte the inverse Forier transorm o the prodct o H,vF,v. This is identical to what we wold obtain by sing convoltion in the spatial domain, as long as the ilter mask hx,y is the inverse Forier transorm o H,v. Convolving periodic nctions can case intererence between adjacent period i the periods are close with respect to the dration o the nonzero parts o the nctions. 0

11 This intererence, wraparond error, can be avoided by padding the nctions with zeros as explain below. Assme that nctions x,y and hx,y are o size AXB and CXD, respectively. Form two extended padded nctions both o size PXQ by appending zeros to and h. The wraparond error is avoided by choosing: P A C and Q B D In MATLAB, we will se F t, PQ, PQ This appends enogh zeros to sch that the reslting image is o size PQ*PQ, then comptes the FFT.

12 3
13 Basic Steps in DFT Filtering 5 Basic Steps in DFT Filtering. Obtain the padding parameters sing nction paddedsize: PQ paddedsizesize;. Obtain the Forier transorm with padding: F t, PQ, PQ; 3. Generate a ilter nction, H, o size PQXPQ sing one o the methods discssed in the remainder o this chapter. The ilter mst be in the ormat shown in Fig.b. I it is not in that ormat, se shit to make it.. Mltiply the transorm by the ilter: G H.* F 6
14 Basic Steps in DFT Filtering 5. Obtain the real part o the inverse FFT o G: g realitg; 6. Crop the top, let rectangle to the original size: g g:size,, :size, ; 7 Example or DFT Filtering Try this or [0 0; ]; PQ paddedsizesize; Fp t, PQ, PQ; HP lpilter gassian, PQ, PQ, *sig; GP HP.* Fp; gp realitgp; gpc gp:size,, :size,; %cropping imshowgp, [ ] Similar reslt as: w special'gassian', 3,3; gnew imilterdoble, w 8
15 Obtaining Freqency Domain Filters rom Spatial Filters In general, iltering in the spatial domain is more eicient comptationally than reqency domain iltering when the ilters are small. One obvios approach or generating a reqency domain ilter, H, that corresponds to a given spatial ilter, h, is to let: H th, PQ, PQ, where the vales o vector PQ depend on the size o the image we want to ilter, as discssed in the last section. Bt we need to know: 9 Obtaining Freqency Domain Filters rom Spatial Filters How to convert spatial ilters into eqivalent reqency domain ilters, How to compare the reslts between spatial domain iltering sing nction imilter, and reqency domain iltering. 30

16 600x600 image F t S tshitlog absf; S gscales; imshows 3 Generate the spatial ilter sing special: h special sobol h To view a plot o the corresponding reqency domain ilter: 3


17 reqzh 33 PQ paddedsizesize; H reqzh, PQ, PQ; H itshith; Origin at the top 3

18 absh 35 absh 36

19 Next, we generate the iltered images. In spatial domain we se: gs imilterdoble, h; Which pads the border o the image with 0. The iltered image obtained by reqency domain processing: g dtilt, H; Download the dtilt, paddedsize, and other related iles rom the notes web page. 37 gs imilterdoble, h; 38


20 g dtilt, H; Negative vales are presented. Average is below the mid-gray vale. 39 imshowabsgs, [ ] 0
![imshowabsg, [ ] Using](/docs-images/82/86025970/images/21-0.jpg "thresholding we can")

21 imshowabsg, [ ] Using thresholding we can see the bondaries better absgs > 0.*absmaxgs:

22 Using thresholding we can see the bondaries better absg > 0.*absmaxg: 3 Generating Filters Directly in the Freqency Domain We discssed circlarly symmetric ilters that are speciied as varios nctions o distance rom the origin o the transorm. One o the things we need to compte is the distance between any point and a speciied point in the reqency rectangle. In MATLAB, or FFT comptations the origin o the transorm is at the top-let o the reqency rectangle. Ths, or distance is also measred rom that point. In order or s to compte sch a distance, we need the meshing system. This is what we call meshgrid array and is generated by dtv nction.
23 Example Here is an example o distance comptation. In this example we will compte the distance sqared rom every point in a rectangle o size 8x5 to the origin o the reqency rectangle. >> [U, V] dtv8, 5; This comptes meshgrid reqency matrices U and V both o size 8-by-5. >> D U.^ V.^ 5 U V
24 D U V D
25 nction [U, V] dtv[m, N] 0: M-; v 0: N-; idx ind > M/; idx idx M; idy indv > N/; vidy vidy N; [U, V] meshgrid, v; The meshgrid nction will prodce two arrays. Rows on U are copies o rows in and colmns on V are copies o colmns on v. 9 The distance with respect to the center o the reqency rectangle can be compted as: >> tshitd ans
26 Lowpass Freqency Domain Filters An Ideal Lowpass Filter ILPF has the transer nction: i D, v D0 H, v 0 i D, v > D0 Where D 0 is a speciied non-negative nmber and D,v is the distance rom point, v to the center o the ilter. The D,v D 0 alls on a circle. Since we mltiply ilter H by the Forier transorm o an image, an ideal case wold be where all components o F otside the circle gets ct o, i.e. gets mltiplied by 0 and keep the points in/on the circle nchanged. 5 Lowpass Freqency Domain Filters cont. A Btterworth lowpass ilter BLPF o order n, with a cto reqency at distance D 0 rom the origin, has the transorm nction: Unlike ILPF, this one does not have a shape discontinity at D 0. In this transormation when D,v D 0,H,v will be 0.5, or down 50% rom its maximm vale. The Gassian lowpass ilter GLPF is given by: Where σ is the standard deviation. H I we let σ D 0 we will obtain: What wold be H,v For H D,v D 0? [ D, v / D0] H, v n, v e, v e D D, v/ σ 5, v/ D 0
27 GLPF 0.9 e^-p/ p Where p D,v/D 0 53 Example: Create a 3x3 ilter in the reqency domain. 5


28 Example Original Image 55 PQ paddedsizesize; [U, V] dtvpq, PQ ; D0 0.05*PQ; F t, PQ, PQ; H exp- U.^ V.^/*D0^; igre, imshowtshith, [ ] 56
![Spectrm: igre, imshowlog abstshitf,[ ] 57 g dtilt, H;](/docs-images/82/86025970/images/29-0.jpg "igre, imshowg, [ ] Note: The lpilter generates the")

29 Spectrm: igre, imshowlog abstshitf,[ ] 57 g dtilt, H; igre, imshowg, [ ] Note: The lpilter generates the transer nctions o all the lowpass ilters discssed in this chapter. Yo need to copy this ile rom the notes web page. 58
30 Sharpening Freqency Domain Filters Jst as lowpass iltering blrs an image, the opposite will happen in case o highpass iltering. Highpass ilters sharpen the image by attenating the low reqencies and leaving the high reqencies o the Forier transorms relatively nchanged. Basics o highpass iltering Given the transer nction H p,v o a lowpass ilter, we obtain the transer nction o the corresponding highpass ilter by sing the simple relation: H hp, v H p, v The nction hpilter is sed in MATLAB to generate highpass ilters. 59 Highpass Filter Options with hpilter hpiltertype, M, N, D0, n It creates the transer nction o a highpass ilter, H, o the speciied TYPE and size M-by-N. ideal : Ideal highpass ilter with cto reqency D0. No need or n, and D0 mst be positive. btw : Btterworth highpass ilter o order n, and cto D0. The dealt vale or n is.0. D0 mst be positive. gassian : Gassian highpass ilter with cto standard deviation D0. No need or n, and D0 mst be positive. 60
31 Example Ideal highpass ilter H tshithpilter ideal, 500, 500, 50 ; meshh:0:500, :0:500; axis[ ] colormap[0 0 0] axis o axis o 6 Example Ideal highpass ilter Corresponding image to This one is shown on the right hand side igre, imshowh, [ ] 6
![Example Btterworth highpass ilter H tshithpilter btterworth, 500, 500, 50 ; meshh:0:500, :0:500; axis[0 50 0 50 0 ] colormap[0 0 0]](/docs-images/82/86025970/images/32-0.jpg "axis o axis o 63 Example Btterworth highpass ilter Corresponding image to This one is shown on the right hand side igre, imshowh, [ ]")
32 Example Btterworth highpass ilter H tshithpilter btterworth, 500, 500, 50 ; meshh:0:500, :0:500; axis[ ] colormap[0 0 0] axis o axis o 63 Example Btterworth highpass ilter Corresponding image to This one is shown on the right hand side igre, imshowh, [ ] 6



33 Example Gassian highpass ilter Corresponding image to This one is shown on the right hand side 65 PQ paddedsizesize; D0 0.05*PQ; H hpilter gassian, PQ, PQ, D0; g dtilt, H; igre, imshoowg, [ ] 66
34 High-Freqency Emphasis Filtering Highpass iltering zero ot the dc term, ths redcing the average vale o an image to 0. An approach to compensate or this is to add an oset to a highpass ilter. When an oset is combined with mltiplying the ilter by a constant greater than, the approach is called highreqency emphasis. The mltiplier increases the amplitde o low reqencies, bt low reqency eects on enhancement are less than those o high reqencies. The high-reqency emphasis transer nction is deined as: H he, v a bh hp,v Where a is the oset, b is the mltiplier, and H hp,v is the transer nction o a highpass ilter. 67
Digital Image Processing. Lecture 8 (Enhancement in the Frequency domain) Bu-Ali Sina University Computer Engineering Dep.
 Bu-Ali Sina University Computer Engineering Dep.") Digital Image Processing Lectre 8 Enhancement in the Freqenc domain B-Ali Sina Uniersit Compter Engineering Dep. Fall 009 Image Enhancement In The Freqenc Domain Otline Jean Baptiste Joseph Forier The
Digital Image Processing Lectre 8 Enhancement in the Freqenc domain B-Ali Sina Uniersit Compter Engineering Dep. Fall 009 Image Enhancement In The Freqenc Domain Otline Jean Baptiste Joseph Forier The
Image and Multidimensional Signal Processing
 Image and Mltidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Compter Science http://inside.mines.ed/~whoff/ Forier Transform Part : D discrete transforms 2 Overview
Image and Mltidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Compter Science http://inside.mines.ed/~whoff/ Forier Transform Part : D discrete transforms 2 Overview
3. Several Random Variables
 . Several Random Variables. To Random Variables. Conditional Probabilit--Revisited. Statistical Independence.4 Correlation beteen Random Variables Standardied (or ero mean normalied) random variables.5
. Several Random Variables. To Random Variables. Conditional Probabilit--Revisited. Statistical Independence.4 Correlation beteen Random Variables Standardied (or ero mean normalied) random variables.5
FEA Solution Procedure
 EA Soltion Procedre (demonstrated with a -D bar element problem) EA Procedre for Static Analysis. Prepare the E model a. discretize (mesh) the strctre b. prescribe loads c. prescribe spports. Perform calclations
EA Soltion Procedre (demonstrated with a -D bar element problem) EA Procedre for Static Analysis. Prepare the E model a. discretize (mesh) the strctre b. prescribe loads c. prescribe spports. Perform calclations
Lesson 81: The Cross Product of Vectors
 Lesson 8: The Cross Prodct of Vectors IBHL - SANTOWSKI In this lesson yo will learn how to find the cross prodct of two ectors how to find an orthogonal ector to a plane defined by two ectors how to find
Lesson 8: The Cross Prodct of Vectors IBHL - SANTOWSKI In this lesson yo will learn how to find the cross prodct of two ectors how to find an orthogonal ector to a plane defined by two ectors how to find
Section 7.4: Integration of Rational Functions by Partial Fractions
 Section 7.4: Integration of Rational Fnctions by Partial Fractions This is abot as complicated as it gets. The Method of Partial Fractions Ecept for a few very special cases, crrently we have no way to
Section 7.4: Integration of Rational Fnctions by Partial Fractions This is abot as complicated as it gets. The Method of Partial Fractions Ecept for a few very special cases, crrently we have no way to
FEA Solution Procedure
 EA Soltion Procedre (demonstrated with a -D bar element problem) MAE 5 - inite Element Analysis Several slides from this set are adapted from B.S. Altan, Michigan Technological University EA Procedre for
EA Soltion Procedre (demonstrated with a -D bar element problem) MAE 5 - inite Element Analysis Several slides from this set are adapted from B.S. Altan, Michigan Technological University EA Procedre for
Bertrand s Theorem. October 8, µr 2 + V (r) 0 = dv eff dr. 3 + dv. f (r 0 )
 0 = dv eff dr. 3 + dv. f (r 0 )") Bertrand s Theorem October 8, Circlar orbits The eective potential, V e = has a minimm or maximm at r i and only i so we mst have = dv e L µr + V r = L µ 3 + dv = L µ 3 r r = L µ 3 At this radis, there
Bertrand s Theorem October 8, Circlar orbits The eective potential, V e = has a minimm or maximm at r i and only i so we mst have = dv e L µr + V r = L µ 3 + dv = L µ 3 r r = L µ 3 At this radis, there
FEA Solution Procedure
 EA Soltion rocedre (demonstrated with a -D bar element problem) MAE - inite Element Analysis Many slides from this set are originally from B.S. Altan, Michigan Technological U. EA rocedre for Static Analysis.
EA Soltion rocedre (demonstrated with a -D bar element problem) MAE - inite Element Analysis Many slides from this set are originally from B.S. Altan, Michigan Technological U. EA rocedre for Static Analysis.
FRTN10 Exercise 12. Synthesis by Convex Optimization
 FRTN Exercise 2. 2. We want to design a controller C for the stable SISO process P as shown in Figre 2. sing the Yola parametrization and convex optimization. To do this, the control loop mst first be
FRTN Exercise 2. 2. We want to design a controller C for the stable SISO process P as shown in Figre 2. sing the Yola parametrization and convex optimization. To do this, the control loop mst first be
m = Average Rate of Change (Secant Slope) Example:
 Example:") Average Rate o Change Secant Slope Deinition: The average change secant slope o a nction over a particlar interval [a, b] or [a, ]. Eample: What is the average rate o change o the nction over the interval
Average Rate o Change Secant Slope Deinition: The average change secant slope o a nction over a particlar interval [a, b] or [a, ]. Eample: What is the average rate o change o the nction over the interval
Integration of Basic Functions. Session 7 : 9/23 1
 Integration o Basic Fnctions Session 7 : 9/3 Antiderivation Integration Deinition: Taking the antiderivative, or integral, o some nction F(), reslts in the nction () i ()F() Pt simply: i yo take the integral
Integration o Basic Fnctions Session 7 : 9/3 Antiderivation Integration Deinition: Taking the antiderivative, or integral, o some nction F(), reslts in the nction () i ()F() Pt simply: i yo take the integral
Elements of Coordinate System Transformations
 B Elements of Coordinate System Transformations Coordinate system transformation is a powerfl tool for solving many geometrical and kinematic problems that pertain to the design of gear ctting tools and
B Elements of Coordinate System Transformations Coordinate system transformation is a powerfl tool for solving many geometrical and kinematic problems that pertain to the design of gear ctting tools and
Setting The K Value And Polarization Mode Of The Delta Undulator
 LCLS-TN-4- Setting The Vale And Polarization Mode Of The Delta Undlator Zachary Wolf, Heinz-Dieter Nhn SLAC September 4, 04 Abstract This note provides the details for setting the longitdinal positions
LCLS-TN-4- Setting The Vale And Polarization Mode Of The Delta Undlator Zachary Wolf, Heinz-Dieter Nhn SLAC September 4, 04 Abstract This note provides the details for setting the longitdinal positions
Control Systems
 6.5 Control Systems Last Time: Introdction Motivation Corse Overview Project Math. Descriptions of Systems ~ Review Classification of Systems Linear Systems LTI Systems The notion of state and state variables
6.5 Control Systems Last Time: Introdction Motivation Corse Overview Project Math. Descriptions of Systems ~ Review Classification of Systems Linear Systems LTI Systems The notion of state and state variables
Lecture 3. (2) Last time: 3D space. The dot product. Dan Nichols January 30, 2018
 Last time: 3D space. The dot product. Dan Nichols January 30, 2018") Lectre 3 The dot prodct Dan Nichols nichols@math.mass.ed MATH 33, Spring 018 Uniersity of Massachsetts Janary 30, 018 () Last time: 3D space Right-hand rle, the three coordinate planes 3D coordinate system:
Lectre 3 The dot prodct Dan Nichols nichols@math.mass.ed MATH 33, Spring 018 Uniersity of Massachsetts Janary 30, 018 () Last time: 3D space Right-hand rle, the three coordinate planes 3D coordinate system:
Figure 1 Probability density function of Wedge copula for c = (best fit to Nominal skew of DRAM case study).
.") Wedge Copla This docment explains the constrction and properties o a particlar geometrical copla sed to it dependency data rom the edram case stdy done at Portland State University. The probability density
Wedge Copla This docment explains the constrction and properties o a particlar geometrical copla sed to it dependency data rom the edram case stdy done at Portland State University. The probability density
Lecture 7 Waveguides. TC 412 Microwave Communications
 Lectre 7 Wavegides TC 41 Microwave Commnications RS 1 Review Impedance matching to minimie power relection rom load Lmped-element tners Single-stb tners Microstrip lines The most poplar transmission line
Lectre 7 Wavegides TC 41 Microwave Commnications RS 1 Review Impedance matching to minimie power relection rom load Lmped-element tners Single-stb tners Microstrip lines The most poplar transmission line
Lecture Notes: Finite Element Analysis, J.E. Akin, Rice University
 9. TRUSS ANALYSIS... 1 9.1 PLANAR TRUSS... 1 9. SPACE TRUSS... 11 9.3 SUMMARY... 1 9.4 EXERCISES... 15 9. Trss analysis 9.1 Planar trss: The differential eqation for the eqilibrim of an elastic bar (above)
9. TRUSS ANALYSIS... 1 9.1 PLANAR TRUSS... 1 9. SPACE TRUSS... 11 9.3 SUMMARY... 1 9.4 EXERCISES... 15 9. Trss analysis 9.1 Planar trss: The differential eqation for the eqilibrim of an elastic bar (above)
Second-Order Wave Equation
 Second-Order Wave Eqation A. Salih Department of Aerospace Engineering Indian Institte of Space Science and Technology, Thirvananthapram 3 December 016 1 Introdction The classical wave eqation is a second-order
Second-Order Wave Eqation A. Salih Department of Aerospace Engineering Indian Institte of Space Science and Technology, Thirvananthapram 3 December 016 1 Introdction The classical wave eqation is a second-order
Digital Image Processing. Chapter 4: Image Enhancement in the Frequency Domain
 Digital Image Processing Chapter 4: Image Enhancement in the Frequency Domain Image Enhancement in Frequency Domain Objective: To understand the Fourier Transform and frequency domain and how to apply
Digital Image Processing Chapter 4: Image Enhancement in the Frequency Domain Image Enhancement in Frequency Domain Objective: To understand the Fourier Transform and frequency domain and how to apply
EXERCISES WAVE EQUATION. In Problems 1 and 2 solve the heat equation (1) subject to the given conditions. Assume a rod of length L.
 subject to the given conditions. Assume a rod of length L.") .4 WAVE EQUATION 445 EXERCISES.3 In Problems and solve the heat eqation () sbject to the given conditions. Assme a rod of length.. (, t), (, t) (, ),, > >. (, t), (, t) (, ) ( ) 3. Find the temperatre
.4 WAVE EQUATION 445 EXERCISES.3 In Problems and solve the heat eqation () sbject to the given conditions. Assme a rod of length.. (, t), (, t) (, ),, > >. (, t), (, t) (, ) ( ) 3. Find the temperatre
III. Demonstration of a seismometer response with amplitude and phase responses at:
 GG5330, Spring semester 006 Assignment #1, Seismometry and Grond Motions De 30 Janary 006. 1. Calibration Of A Seismometer Using Java: A really nifty se of Java is now available for demonstrating the seismic
GG5330, Spring semester 006 Assignment #1, Seismometry and Grond Motions De 30 Janary 006. 1. Calibration Of A Seismometer Using Java: A really nifty se of Java is now available for demonstrating the seismic
Frequency Estimation, Multiple Stationary Nonsinusoidal Resonances With Trend 1
 Freqency Estimation, Mltiple Stationary Nonsinsoidal Resonances With Trend 1 G. Larry Bretthorst Department of Chemistry, Washington University, St. Lois MO 6313 Abstract. In this paper, we address the
Freqency Estimation, Mltiple Stationary Nonsinsoidal Resonances With Trend 1 G. Larry Bretthorst Department of Chemistry, Washington University, St. Lois MO 6313 Abstract. In this paper, we address the
MECHANICS OF SOLIDS COMPRESSION MEMBERS TUTORIAL 2 INTERMEDIATE AND SHORT COMPRESSION MEMBERS
 MECHANICS O SOIDS COMPRESSION MEMBERS TUTORIA INTERMEDIATE AND SHORT COMPRESSION MEMBERS Yo shold jdge yor progress by completing the self assessment exercises. On completion of this ttorial yo shold be
MECHANICS O SOIDS COMPRESSION MEMBERS TUTORIA INTERMEDIATE AND SHORT COMPRESSION MEMBERS Yo shold jdge yor progress by completing the self assessment exercises. On completion of this ttorial yo shold be
Chapter 4 Linear Models
 Chapter 4 Linear Models General Linear Model Recall signal + WG case: x[n] s[n;] + w[n] x s( + w Here, dependence on is general ow we consider a special case: Linear Observations : s( H + b known observation
Chapter 4 Linear Models General Linear Model Recall signal + WG case: x[n] s[n;] + w[n] x s( + w Here, dependence on is general ow we consider a special case: Linear Observations : s( H + b known observation
Department of Industrial Engineering Statistical Quality Control presented by Dr. Eng. Abed Schokry
 Department of Indstrial Engineering Statistical Qality Control presented by Dr. Eng. Abed Schokry Department of Indstrial Engineering Statistical Qality Control C and U Chart presented by Dr. Eng. Abed
Department of Indstrial Engineering Statistical Qality Control presented by Dr. Eng. Abed Schokry Department of Indstrial Engineering Statistical Qality Control C and U Chart presented by Dr. Eng. Abed
1 The space of linear transformations from R n to R m :
 Math 540 Spring 20 Notes #4 Higher deriaties, Taylor s theorem The space of linear transformations from R n to R m We hae discssed linear transformations mapping R n to R m We can add sch linear transformations
Math 540 Spring 20 Notes #4 Higher deriaties, Taylor s theorem The space of linear transformations from R n to R m We hae discssed linear transformations mapping R n to R m We can add sch linear transformations
Linear System Theory (Fall 2011): Homework 1. Solutions
: Homework 1. Solutions") Linear System Theory (Fall 20): Homework Soltions De Sep. 29, 20 Exercise (C.T. Chen: Ex.3-8). Consider a linear system with inpt and otpt y. Three experiments are performed on this system sing the inpts
Linear System Theory (Fall 20): Homework Soltions De Sep. 29, 20 Exercise (C.T. Chen: Ex.3-8). Consider a linear system with inpt and otpt y. Three experiments are performed on this system sing the inpts
CONTENTS. INTRODUCTION MEQ curriculum objectives for vectors (8% of year). page 2 What is a vector? What is a scalar? page 3, 4
. page 2 What is a vector? What is a scalar? page 3, 4") CONTENTS INTRODUCTION MEQ crriclm objectives for vectors (8% of year). page 2 What is a vector? What is a scalar? page 3, 4 VECTOR CONCEPTS FROM GEOMETRIC AND ALGEBRAIC PERSPECTIVES page 1 Representation
CONTENTS INTRODUCTION MEQ crriclm objectives for vectors (8% of year). page 2 What is a vector? What is a scalar? page 3, 4 VECTOR CONCEPTS FROM GEOMETRIC AND ALGEBRAIC PERSPECTIVES page 1 Representation
The Cross Product of Two Vectors in Space DEFINITION. Cross Product. u * v = s ƒ u ƒƒv ƒ sin ud n
 12.4 The Cross Prodct 873 12.4 The Cross Prodct In stdying lines in the plane, when we needed to describe how a line was tilting, we sed the notions of slope and angle of inclination. In space, we want
12.4 The Cross Prodct 873 12.4 The Cross Prodct In stdying lines in the plane, when we needed to describe how a line was tilting, we sed the notions of slope and angle of inclination. In space, we want
Math 116 First Midterm October 14, 2009
 Math 116 First Midterm October 14, 9 Name: EXAM SOLUTIONS Instrctor: Section: 1. Do not open this exam ntil yo are told to do so.. This exam has 1 pages inclding this cover. There are 9 problems. Note
Math 116 First Midterm October 14, 9 Name: EXAM SOLUTIONS Instrctor: Section: 1. Do not open this exam ntil yo are told to do so.. This exam has 1 pages inclding this cover. There are 9 problems. Note
6.4 VECTORS AND DOT PRODUCTS
 458 Chapter 6 Additional Topics in Trigonometry 6.4 VECTORS AND DOT PRODUCTS What yo shold learn ind the dot prodct of two ectors and se the properties of the dot prodct. ind the angle between two ectors
458 Chapter 6 Additional Topics in Trigonometry 6.4 VECTORS AND DOT PRODUCTS What yo shold learn ind the dot prodct of two ectors and se the properties of the dot prodct. ind the angle between two ectors
Fourier series: Any periodic signals can be viewed as weighted sum. different frequencies. view frequency as an
 Image Enhancement in the Frequency Domain Fourier series: Any periodic signals can be viewed as weighted sum of sinusoidal signals with different frequencies Frequency Domain: view frequency as an independent
Image Enhancement in the Frequency Domain Fourier series: Any periodic signals can be viewed as weighted sum of sinusoidal signals with different frequencies Frequency Domain: view frequency as an independent
Assignment Fall 2014
 Assignment 5.086 Fall 04 De: Wednesday, 0 December at 5 PM. Upload yor soltion to corse website as a zip file YOURNAME_ASSIGNMENT_5 which incldes the script for each qestion as well as all Matlab fnctions
Assignment 5.086 Fall 04 De: Wednesday, 0 December at 5 PM. Upload yor soltion to corse website as a zip file YOURNAME_ASSIGNMENT_5 which incldes the script for each qestion as well as all Matlab fnctions
STEP Support Programme. STEP III Hyperbolic Functions: Solutions
 STEP Spport Programme STEP III Hyperbolic Fnctions: Soltions Start by sing the sbstittion t cosh x. This gives: sinh x cosh a cosh x cosh a sinh x t sinh x dt t dt t + ln t ln t + ln cosh a ln ln cosh
STEP Spport Programme STEP III Hyperbolic Fnctions: Soltions Start by sing the sbstittion t cosh x. This gives: sinh x cosh a cosh x cosh a sinh x t sinh x dt t dt t + ln t ln t + ln cosh a ln ln cosh
Filtering in Frequency Domain
 Dr. Praveen Sankaran Department of ECE NIT Calicut February 4, 2013 Outline 1 2D DFT - Review 2 2D Sampling 2D DFT - Review 2D Impulse Train s [t, z] = m= n= δ [t m T, z n Z] (1) f (t, z) s [t, z] sampled
Dr. Praveen Sankaran Department of ECE NIT Calicut February 4, 2013 Outline 1 2D DFT - Review 2 2D Sampling 2D DFT - Review 2D Impulse Train s [t, z] = m= n= δ [t m T, z n Z] (1) f (t, z) s [t, z] sampled
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 13 Oct 2 nd, 2018 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review f 0 0 0 1 0 0 0 0 w 1 2 3 2 8 Zero Padding 0 0 0 0 0 0 0 1 0 0 0 0
Digital Image Processing COSC 6380/4393 Lecture 13 Oct 2 nd, 2018 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review f 0 0 0 1 0 0 0 0 w 1 2 3 2 8 Zero Padding 0 0 0 0 0 0 0 1 0 0 0 0
EXPT. 5 DETERMINATION OF pk a OF AN INDICATOR USING SPECTROPHOTOMETRY
 EXPT. 5 DETERMITIO OF pk a OF IDICTOR USIG SPECTROPHOTOMETRY Strctre 5.1 Introdction Objectives 5.2 Principle 5.3 Spectrophotometric Determination of pka Vale of Indicator 5.4 Reqirements 5.5 Soltions
EXPT. 5 DETERMITIO OF pk a OF IDICTOR USIG SPECTROPHOTOMETRY Strctre 5.1 Introdction Objectives 5.2 Principle 5.3 Spectrophotometric Determination of pka Vale of Indicator 5.4 Reqirements 5.5 Soltions
APPENDIX B MATRIX NOTATION. The Definition of Matrix Notation is the Definition of Matrix Multiplication B.1 INTRODUCTION
 APPENDIX B MAIX NOAION he Deinition o Matrix Notation is the Deinition o Matrix Mltiplication B. INODUCION { XE "Matrix Mltiplication" }{ XE "Matrix Notation" }he se o matrix notations is not necessary
APPENDIX B MAIX NOAION he Deinition o Matrix Notation is the Deinition o Matrix Mltiplication B. INODUCION { XE "Matrix Mltiplication" }{ XE "Matrix Notation" }he se o matrix notations is not necessary
Sensitivity Analysis in Bayesian Networks: From Single to Multiple Parameters
 Sensitivity Analysis in Bayesian Networks: From Single to Mltiple Parameters Hei Chan and Adnan Darwiche Compter Science Department University of California, Los Angeles Los Angeles, CA 90095 {hei,darwiche}@cs.cla.ed
Sensitivity Analysis in Bayesian Networks: From Single to Mltiple Parameters Hei Chan and Adnan Darwiche Compter Science Department University of California, Los Angeles Los Angeles, CA 90095 {hei,darwiche}@cs.cla.ed
n 1 sin 1 n 2 sin 2 Light and Modern Incident ray Normal 30.0 Air Glass Refracted ray speed of light in vacuum speed of light in a medium c v
 Light and Modern E hf n speed of light in vacm speed of light in a medim c v n sin n sin Incident ray Normal TIP. The reqency Remains the Same The freqency of a wave does not change as the wave passes
Light and Modern E hf n speed of light in vacm speed of light in a medim c v n sin n sin Incident ray Normal TIP. The reqency Remains the Same The freqency of a wave does not change as the wave passes
Vectors in Rn un. This definition of norm is an extension of the Pythagorean Theorem. Consider the vector u = (5, 8) in R 2
 in R 2") MATH 307 Vectors in Rn Dr. Neal, WKU Matrices of dimension 1 n can be thoght of as coordinates, or ectors, in n- dimensional space R n. We can perform special calclations on these ectors. In particlar,
MATH 307 Vectors in Rn Dr. Neal, WKU Matrices of dimension 1 n can be thoght of as coordinates, or ectors, in n- dimensional space R n. We can perform special calclations on these ectors. In particlar,
Digital Image Processing. Filtering in the Frequency Domain
 2D Linear Systems 2D Fourier Transform and its Properties The Basics of Filtering in Frequency Domain Image Smoothing Image Sharpening Selective Filtering Implementation Tips 1 General Definition: System
2D Linear Systems 2D Fourier Transform and its Properties The Basics of Filtering in Frequency Domain Image Smoothing Image Sharpening Selective Filtering Implementation Tips 1 General Definition: System
Chapter 4: Filtering in the Frequency Domain. Fourier Analysis R. C. Gonzalez & R. E. Woods
 Fourier Analysis 1992 2008 R. C. Gonzalez & R. E. Woods Properties of δ (t) and (x) δ : f t) δ ( t t ) dt = f ( ) f x) δ ( x x ) = f ( ) ( 0 t0 x= ( 0 x0 1992 2008 R. C. Gonzalez & R. E. Woods Sampling
Fourier Analysis 1992 2008 R. C. Gonzalez & R. E. Woods Properties of δ (t) and (x) δ : f t) δ ( t t ) dt = f ( ) f x) δ ( x x ) = f ( ) ( 0 t0 x= ( 0 x0 1992 2008 R. C. Gonzalez & R. E. Woods Sampling
Classify by number of ports and examine the possible structures that result. Using only one-port elements, no more than two elements can be assembled.
 Jnction elements in network models. Classify by nmber of ports and examine the possible strctres that reslt. Using only one-port elements, no more than two elements can be assembled. Combining two two-ports
Jnction elements in network models. Classify by nmber of ports and examine the possible strctres that reslt. Using only one-port elements, no more than two elements can be assembled. Combining two two-ports
Microscopic Properties of Gases
 icroscopic Properties of Gases So far we he seen the gas laws. These came from observations. In this section we want to look at a theory that explains the gas laws: The kinetic theory of gases or The kinetic
icroscopic Properties of Gases So far we he seen the gas laws. These came from observations. In this section we want to look at a theory that explains the gas laws: The kinetic theory of gases or The kinetic
LIGHTWEIGHT STRUCTURES in CIVIL ENGINEERING - CONTEMPORARY PROBLEMS
 ITERATIOAL SEMIAR Organized by Polish Chapter o International Association or Shell and Spatial Strctres LIGHTWEIGHT STRUCTURES in CIVIL EGIEERIG - COTEMPORARY PROBLEMS STOCHASTIC CORROSIO EFFECTS O RELIABILITY
ITERATIOAL SEMIAR Organized by Polish Chapter o International Association or Shell and Spatial Strctres LIGHTWEIGHT STRUCTURES in CIVIL EGIEERIG - COTEMPORARY PROBLEMS STOCHASTIC CORROSIO EFFECTS O RELIABILITY
Study on the impulsive pressure of tank oscillating by force towards multiple degrees of freedom
 EPJ Web of Conferences 80, 0034 (08) EFM 07 Stdy on the implsive pressre of tank oscillating by force towards mltiple degrees of freedom Shigeyki Hibi,* The ational Defense Academy, Department of Mechanical
EPJ Web of Conferences 80, 0034 (08) EFM 07 Stdy on the implsive pressre of tank oscillating by force towards mltiple degrees of freedom Shigeyki Hibi,* The ational Defense Academy, Department of Mechanical
Discontinuous Fluctuation Distribution for Time-Dependent Problems
 Discontinos Flctation Distribtion for Time-Dependent Problems Matthew Hbbard School of Compting, University of Leeds, Leeds, LS2 9JT, UK meh@comp.leeds.ac.k Introdction For some years now, the flctation
Discontinos Flctation Distribtion for Time-Dependent Problems Matthew Hbbard School of Compting, University of Leeds, Leeds, LS2 9JT, UK meh@comp.leeds.ac.k Introdction For some years now, the flctation
10.2 Solving Quadratic Equations by Completing the Square
 . Solving Qadratic Eqations b Completing the Sqare Consider the eqation ( ) We can see clearl that the soltions are However, What if the eqation was given to s in standard form, that is 6 How wold we go
. Solving Qadratic Eqations b Completing the Sqare Consider the eqation ( ) We can see clearl that the soltions are However, What if the eqation was given to s in standard form, that is 6 How wold we go
Chapter 3 MATHEMATICAL MODELING OF DYNAMIC SYSTEMS
 Chapter 3 MATHEMATICAL MODELING OF DYNAMIC SYSTEMS 3. System Modeling Mathematical Modeling In designing control systems we mst be able to model engineered system dynamics. The model of a dynamic system
Chapter 3 MATHEMATICAL MODELING OF DYNAMIC SYSTEMS 3. System Modeling Mathematical Modeling In designing control systems we mst be able to model engineered system dynamics. The model of a dynamic system
Pulses on a Struck String
 8.03 at ESG Spplemental Notes Plses on a Strck String These notes investigate specific eamples of transverse motion on a stretched string in cases where the string is at some time ndisplaced, bt with a
8.03 at ESG Spplemental Notes Plses on a Strck String These notes investigate specific eamples of transverse motion on a stretched string in cases where the string is at some time ndisplaced, bt with a
Introdction Finite elds play an increasingly important role in modern digital commnication systems. Typical areas of applications are cryptographic sc
 A New Architectre for a Parallel Finite Field Mltiplier with Low Complexity Based on Composite Fields Christof Paar y IEEE Transactions on Compters, Jly 996, vol 45, no 7, pp 856-86 Abstract In this paper
A New Architectre for a Parallel Finite Field Mltiplier with Low Complexity Based on Composite Fields Christof Paar y IEEE Transactions on Compters, Jly 996, vol 45, no 7, pp 856-86 Abstract In this paper
Graphs and Networks Lecture 5. PageRank. Lecturer: Daniel A. Spielman September 20, 2007
 Graphs and Networks Lectre 5 PageRank Lectrer: Daniel A. Spielman September 20, 2007 5.1 Intro to PageRank PageRank, the algorithm reportedly sed by Google, assigns a nmerical rank to eery web page. More
Graphs and Networks Lectre 5 PageRank Lectrer: Daniel A. Spielman September 20, 2007 5.1 Intro to PageRank PageRank, the algorithm reportedly sed by Google, assigns a nmerical rank to eery web page. More
4 Exact laminar boundary layer solutions
 4 Eact laminar bondary layer soltions 4.1 Bondary layer on a flat plate (Blasis 1908 In Sec. 3, we derived the bondary layer eqations for 2D incompressible flow of constant viscosity past a weakly crved
4 Eact laminar bondary layer soltions 4.1 Bondary layer on a flat plate (Blasis 1908 In Sec. 3, we derived the bondary layer eqations for 2D incompressible flow of constant viscosity past a weakly crved
sin u 5 opp } cos u 5 adj } hyp opposite csc u 5 hyp } sec u 5 hyp } opp Using Inverse Trigonometric Functions
 13 Big Idea 1 CHAPTER SUMMARY BIG IDEAS Using Trigonometric Fnctions Algebra classzone.com Electronic Fnction Library For Yor Notebook hypotense acent osite sine cosine tangent sin 5 hyp cos 5 hyp tan
13 Big Idea 1 CHAPTER SUMMARY BIG IDEAS Using Trigonometric Fnctions Algebra classzone.com Electronic Fnction Library For Yor Notebook hypotense acent osite sine cosine tangent sin 5 hyp cos 5 hyp tan
Technical Note. ODiSI-B Sensor Strain Gage Factor Uncertainty
 Technical Note EN-FY160 Revision November 30, 016 ODiSI-B Sensor Strain Gage Factor Uncertainty Abstract Lna has pdated or strain sensor calibration tool to spport NIST-traceable measrements, to compte
Technical Note EN-FY160 Revision November 30, 016 ODiSI-B Sensor Strain Gage Factor Uncertainty Abstract Lna has pdated or strain sensor calibration tool to spport NIST-traceable measrements, to compte
A Survey of the Implementation of Numerical Schemes for Linear Advection Equation
 Advances in Pre Mathematics, 4, 4, 467-479 Pblished Online Agst 4 in SciRes. http://www.scirp.org/jornal/apm http://dx.doi.org/.436/apm.4.485 A Srvey of the Implementation of Nmerical Schemes for Linear
Advances in Pre Mathematics, 4, 4, 467-479 Pblished Online Agst 4 in SciRes. http://www.scirp.org/jornal/apm http://dx.doi.org/.436/apm.4.485 A Srvey of the Implementation of Nmerical Schemes for Linear
Complex Variables. For ECON 397 Macroeconometrics Steve Cunningham
 Comple Variables For ECON 397 Macroeconometrics Steve Cnningham Open Disks or Neighborhoods Deinition. The set o all points which satis the ineqalit
Comple Variables For ECON 397 Macroeconometrics Steve Cnningham Open Disks or Neighborhoods Deinition. The set o all points which satis the ineqalit
Homework 5 Solutions
 Q Homework Soltions We know that the colmn space is the same as span{a & a ( a * } bt we want the basis Ths we need to make a & a ( a * linearly independent So in each of the following problems we row
Q Homework Soltions We know that the colmn space is the same as span{a & a ( a * } bt we want the basis Ths we need to make a & a ( a * linearly independent So in each of the following problems we row
Math 263 Assignment #3 Solutions. 1. A function z = f(x, y) is called harmonic if it satisfies Laplace s equation:
 is called harmonic if it satisfies Laplace s equation:") Math 263 Assignment #3 Soltions 1. A fnction z f(x, ) is called harmonic if it satisfies Laplace s eqation: 2 + 2 z 2 0 Determine whether or not the following are harmonic. (a) z x 2 + 2. We se the one-variable
Math 263 Assignment #3 Soltions 1. A fnction z f(x, ) is called harmonic if it satisfies Laplace s eqation: 2 + 2 z 2 0 Determine whether or not the following are harmonic. (a) z x 2 + 2. We se the one-variable
Chapter 9 Flow over Immersed Bodies
 57:00 Mechanics o Flids and Transport Processes Chapter 9 Proessor Fred Stern Fall 01 1 Chapter 9 Flow over Immersed Bodies Flid lows are broadly categorized: 1. Internal lows sch as dcts/pipes, trbomachinery,
57:00 Mechanics o Flids and Transport Processes Chapter 9 Proessor Fred Stern Fall 01 1 Chapter 9 Flow over Immersed Bodies Flid lows are broadly categorized: 1. Internal lows sch as dcts/pipes, trbomachinery,
Linear Strain Triangle and other types of 2D elements. By S. Ziaei Rad
 Linear Strain Triangle and other tpes o D elements B S. Ziaei Rad Linear Strain Triangle (LST or T6 This element is also called qadratic trianglar element. Qadratic Trianglar Element Linear Strain Triangle
Linear Strain Triangle and other tpes o D elements B S. Ziaei Rad Linear Strain Triangle (LST or T6 This element is also called qadratic trianglar element. Qadratic Trianglar Element Linear Strain Triangle
1. State-Space Linear Systems 2. Block Diagrams 3. Exercises
 LECTURE 1 State-Space Linear Sstems This lectre introdces state-space linear sstems, which are the main focs of this book. Contents 1. State-Space Linear Sstems 2. Block Diagrams 3. Exercises 1.1 State-Space
LECTURE 1 State-Space Linear Sstems This lectre introdces state-space linear sstems, which are the main focs of this book. Contents 1. State-Space Linear Sstems 2. Block Diagrams 3. Exercises 1.1 State-Space
Formal Methods for Deriving Element Equations
 Formal Methods for Deriving Element Eqations And the importance of Shape Fnctions Formal Methods In previos lectres we obtained a bar element s stiffness eqations sing the Direct Method to obtain eact
Formal Methods for Deriving Element Eqations And the importance of Shape Fnctions Formal Methods In previos lectres we obtained a bar element s stiffness eqations sing the Direct Method to obtain eact
Multiplication and division. Explanation and worked examples. First, we ll look at work you should know at this level.
 x Mltilication and division Exlanation and worked examles Level First, we ll look at work yo shold know at this level. Work ot these mltilication and division sms: a) ) 96 c) 8 d) 6 Soltions: a) 9 6 Yo
x Mltilication and division Exlanation and worked examles Level First, we ll look at work yo shold know at this level. Work ot these mltilication and division sms: a) ) 96 c) 8 d) 6 Soltions: a) 9 6 Yo
Evaluation of the Fiberglass-Reinforced Plastics Interfacial Behavior by using Ultrasonic Wave Propagation Method
 17th World Conference on Nondestrctive Testing, 5-8 Oct 008, Shanghai, China Evalation of the Fiberglass-Reinforced Plastics Interfacial Behavior by sing Ultrasonic Wave Propagation Method Jnjie CHANG
17th World Conference on Nondestrctive Testing, 5-8 Oct 008, Shanghai, China Evalation of the Fiberglass-Reinforced Plastics Interfacial Behavior by sing Ultrasonic Wave Propagation Method Jnjie CHANG
Uncertainties of measurement
 Uncertainties of measrement Laboratory tas A temperatre sensor is connected as a voltage divider according to the schematic diagram on Fig.. The temperatre sensor is a thermistor type B5764K [] with nominal
Uncertainties of measrement Laboratory tas A temperatre sensor is connected as a voltage divider according to the schematic diagram on Fig.. The temperatre sensor is a thermistor type B5764K [] with nominal
Chapter 4 Supervised learning:
 Chapter 4 Spervised learning: Mltilayer Networks II Madaline Other Feedforward Networks Mltiple adalines of a sort as hidden nodes Weight change follows minimm distrbance principle Adaptive mlti-layer
Chapter 4 Spervised learning: Mltilayer Networks II Madaline Other Feedforward Networks Mltiple adalines of a sort as hidden nodes Weight change follows minimm distrbance principle Adaptive mlti-layer
Move Blocking Strategies in Receding Horizon Control
 Move Blocking Strategies in Receding Horizon Control Raphael Cagienard, Pascal Grieder, Eric C. Kerrigan and Manfred Morari Abstract In order to deal with the comptational brden of optimal control, it
Move Blocking Strategies in Receding Horizon Control Raphael Cagienard, Pascal Grieder, Eric C. Kerrigan and Manfred Morari Abstract In order to deal with the comptational brden of optimal control, it
Unknown Input High Gain Observer for Parametric Fault Detection and Isolation of Dynamical Systems
 Proceedings o the International MltiConerence o Engineers Compter Scientists 009 Vol II IMECS 009, March 8-0, 009, Hong Kong Unknown Inpt High Gain Observer or Parametric Falt Detection Isolation o Dynamical
Proceedings o the International MltiConerence o Engineers Compter Scientists 009 Vol II IMECS 009, March 8-0, 009, Hong Kong Unknown Inpt High Gain Observer or Parametric Falt Detection Isolation o Dynamical
Chem 4501 Introduction to Thermodynamics, 3 Credits Kinetics, and Statistical Mechanics. Fall Semester Homework Problem Set Number 10 Solutions
 Chem 4501 Introdction to Thermodynamics, 3 Credits Kinetics, and Statistical Mechanics Fall Semester 2017 Homework Problem Set Nmber 10 Soltions 1. McQarrie and Simon, 10-4. Paraphrase: Apply Eler s theorem
Chem 4501 Introdction to Thermodynamics, 3 Credits Kinetics, and Statistical Mechanics Fall Semester 2017 Homework Problem Set Nmber 10 Soltions 1. McQarrie and Simon, 10-4. Paraphrase: Apply Eler s theorem
Simplified Identification Scheme for Structures on a Flexible Base
 Simplified Identification Scheme for Strctres on a Flexible Base L.M. Star California State University, Long Beach G. Mylonais University of Patras, Greece J.P. Stewart University of California, Los Angeles
Simplified Identification Scheme for Strctres on a Flexible Base L.M. Star California State University, Long Beach G. Mylonais University of Patras, Greece J.P. Stewart University of California, Los Angeles
Optimal Control of a Heterogeneous Two Server System with Consideration for Power and Performance
 Optimal Control of a Heterogeneos Two Server System with Consideration for Power and Performance by Jiazheng Li A thesis presented to the University of Waterloo in flfilment of the thesis reqirement for
Optimal Control of a Heterogeneos Two Server System with Consideration for Power and Performance by Jiazheng Li A thesis presented to the University of Waterloo in flfilment of the thesis reqirement for
The Dual of the Maximum Likelihood Method
 Department of Agricltral and Resorce Economics University of California, Davis The Dal of the Maximm Likelihood Method by Qirino Paris Working Paper No. 12-002 2012 Copyright @ 2012 by Qirino Paris All
Department of Agricltral and Resorce Economics University of California, Davis The Dal of the Maximm Likelihood Method by Qirino Paris Working Paper No. 12-002 2012 Copyright @ 2012 by Qirino Paris All
Solving a System of Equations
 Solving a System of Eqations Objectives Understand how to solve a system of eqations with: - Gass Elimination Method - LU Decomposition Method - Gass-Seidel Method - Jacobi Method A system of linear algebraic
Solving a System of Eqations Objectives Understand how to solve a system of eqations with: - Gass Elimination Method - LU Decomposition Method - Gass-Seidel Method - Jacobi Method A system of linear algebraic
Image Enhancement in the frequency domain. GZ Chapter 4
 Image Enhancement in the frequency domain GZ Chapter 4 Contents In this lecture we will look at image enhancement in the frequency domain The Fourier series & the Fourier transform Image Processing in
Image Enhancement in the frequency domain GZ Chapter 4 Contents In this lecture we will look at image enhancement in the frequency domain The Fourier series & the Fourier transform Image Processing in
VIBRATION MEASUREMENT UNCERTAINTY AND RELIABILITY DIAGNOSTICS RESULTS IN ROTATING SYSTEMS
 VIBRATIO MEASUREMET UCERTAITY AD RELIABILITY DIAGOSTICS RESULTS I ROTATIG SYSTEMS. Introdction M. Eidkevicite, V. Volkovas anas University of Technology, Lithania The rotating machinery technical state
VIBRATIO MEASUREMET UCERTAITY AD RELIABILITY DIAGOSTICS RESULTS I ROTATIG SYSTEMS. Introdction M. Eidkevicite, V. Volkovas anas University of Technology, Lithania The rotating machinery technical state
Which of these statements are true? A) 1, 2 and 3 only C) 2, 4 and 5 only. B) 1, 2 and 5 only D) 1, 3 and 4 only
 1, 2 and 3 only C) 2, 4 and 5 only. B) 1, 2 and 5 only D) 1, 3 and 4 only") Name : 1 Qadrilateral RSTU is a parallelogram and M is the point of intersection of its diagonals. S M T ntoine lists the following vector operation statements: R U 1) ST + SR MU ) UT + UR SM 3) RS + RU
Name : 1 Qadrilateral RSTU is a parallelogram and M is the point of intersection of its diagonals. S M T ntoine lists the following vector operation statements: R U 1) ST + SR MU ) UT + UR SM 3) RS + RU
L = 2 λ 2 = λ (1) In other words, the wavelength of the wave in question equals to the string length,
 In other words, the wavelength of the wave in question equals to the string length,") PHY 309 L. Soltions for Problem set # 6. Textbook problem Q.20 at the end of chapter 5: For any standing wave on a string, the distance between neighboring nodes is λ/2, one half of the wavelength. The
PHY 309 L. Soltions for Problem set # 6. Textbook problem Q.20 at the end of chapter 5: For any standing wave on a string, the distance between neighboring nodes is λ/2, one half of the wavelength. The
FOUNTAIN codes [3], [4] provide an efficient solution
![FOUNTAIN codes [3], [4] provide an efficient solution](/thumbs/72/67520403.jpg "FOUNTAIN codes [3], [4] provide an efficient solution") Inactivation Decoding of LT and Raptor Codes: Analysis and Code Design Francisco Lázaro, Stdent Member, IEEE, Gianligi Liva, Senior Member, IEEE, Gerhard Bach, Fellow, IEEE arxiv:176.5814v1 [cs.it 19 Jn
Inactivation Decoding of LT and Raptor Codes: Analysis and Code Design Francisco Lázaro, Stdent Member, IEEE, Gianligi Liva, Senior Member, IEEE, Gerhard Bach, Fellow, IEEE arxiv:176.5814v1 [cs.it 19 Jn
Theoretical and Experimental Implementation of DC Motor Nonlinear Controllers
 Theoretical and Experimental Implementation of DC Motor Nonlinear Controllers D.R. Espinoza-Trejo and D.U. Campos-Delgado Facltad de Ingeniería, CIEP, UASLP, espinoza trejo dr@aslp.mx Facltad de Ciencias,
Theoretical and Experimental Implementation of DC Motor Nonlinear Controllers D.R. Espinoza-Trejo and D.U. Campos-Delgado Facltad de Ingeniería, CIEP, UASLP, espinoza trejo dr@aslp.mx Facltad de Ciencias,
Bayes and Naïve Bayes Classifiers CS434
 Bayes and Naïve Bayes Classifiers CS434 In this lectre 1. Review some basic probability concepts 2. Introdce a sefl probabilistic rle - Bayes rle 3. Introdce the learning algorithm based on Bayes rle (ths
Bayes and Naïve Bayes Classifiers CS434 In this lectre 1. Review some basic probability concepts 2. Introdce a sefl probabilistic rle - Bayes rle 3. Introdce the learning algorithm based on Bayes rle (ths
Reflections on a mismatched transmission line Reflections.doc (4/1/00) Introduction The transmission line equations are given by
 Introduction The transmission line equations are given by") Reflections on a mismatched transmission line Reflections.doc (4/1/00) Introdction The transmission line eqations are given by, I z, t V z t l z t I z, t V z, t c z t (1) (2) Where, c is the per-nit-length
Reflections on a mismatched transmission line Reflections.doc (4/1/00) Introdction The transmission line eqations are given by, I z, t V z t l z t I z, t V z, t c z t (1) (2) Where, c is the per-nit-length
CFD-Simulation thermoakustischer Resonanzeffekte zur Bestimmung der Flammentransferfunktion
 CFD-Simlation thermoakstischer Resonanzeffekte zr Bestimmng der Flammentransferfnktion Ator: Dennis Paschke Technische Universität Berlin Institt für Strömngsmechanik nd Technische Akstik FG Experimentelle
CFD-Simlation thermoakstischer Resonanzeffekte zr Bestimmng der Flammentransferfnktion Ator: Dennis Paschke Technische Universität Berlin Institt für Strömngsmechanik nd Technische Akstik FG Experimentelle
Curves - Foundation of Free-form Surfaces
 Crves - Fondation of Free-form Srfaces Why Not Simply Use a Point Matrix to Represent a Crve? Storage isse and limited resoltion Comptation and transformation Difficlties in calclating the intersections
Crves - Fondation of Free-form Srfaces Why Not Simply Use a Point Matrix to Represent a Crve? Storage isse and limited resoltion Comptation and transformation Difficlties in calclating the intersections
OPTI-502 Optical Design and Instrumentation I John E. Greivenkamp Final Exam In Class Page 1/16 Fall, 2015
 OPTI-502 Optical Design and Instrmentation I John E. Greivenkamp Final Exam In Class Page 1/16 Fall, 2015 Name Closed book; closed notes. Time limit: 120 mintes. An eqation sheet is attached and can be
OPTI-502 Optical Design and Instrmentation I John E. Greivenkamp Final Exam In Class Page 1/16 Fall, 2015 Name Closed book; closed notes. Time limit: 120 mintes. An eqation sheet is attached and can be
PhysicsAndMathsTutor.com
 . Two smooth niform spheres S and T have eqal radii. The mass of S is 0. kg and the mass of T is 0.6 kg. The spheres are moving on a smooth horizontal plane and collide obliqely. Immediately before the
. Two smooth niform spheres S and T have eqal radii. The mass of S is 0. kg and the mass of T is 0.6 kg. The spheres are moving on a smooth horizontal plane and collide obliqely. Immediately before the
The Linear Quadratic Regulator
 10 The Linear Qadratic Reglator 10.1 Problem formlation This chapter concerns optimal control of dynamical systems. Most of this development concerns linear models with a particlarly simple notion of optimality.
10 The Linear Qadratic Reglator 10.1 Problem formlation This chapter concerns optimal control of dynamical systems. Most of this development concerns linear models with a particlarly simple notion of optimality.
QUANTILE ESTIMATION IN SUCCESSIVE SAMPLING
 Jornal of the Korean Statistical Society 2007, 36: 4, pp 543 556 QUANTILE ESTIMATION IN SUCCESSIVE SAMPLING Hosila P. Singh 1, Ritesh Tailor 2, Sarjinder Singh 3 and Jong-Min Kim 4 Abstract In sccessive
Jornal of the Korean Statistical Society 2007, 36: 4, pp 543 556 QUANTILE ESTIMATION IN SUCCESSIVE SAMPLING Hosila P. Singh 1, Ritesh Tailor 2, Sarjinder Singh 3 and Jong-Min Kim 4 Abstract In sccessive
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA. PRINCIPLES AND APPLICATIONS of FLUID MECHANICS UNIT 13 NQF LEVEL 3 OUTCOME 3 - HYDRODYNAMICS
 EDEXCEL NATIONAL CERTIFICATE/DIPLOMA PRINCIPLES AND APPLICATIONS of FLUID MECHANICS UNIT 3 NQF LEVEL 3 OUTCOME 3 - HYDRODYNAMICS TUTORIAL - PIPE FLOW CONTENT Be able to determine the parameters of pipeline
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA PRINCIPLES AND APPLICATIONS of FLUID MECHANICS UNIT 3 NQF LEVEL 3 OUTCOME 3 - HYDRODYNAMICS TUTORIAL - PIPE FLOW CONTENT Be able to determine the parameters of pipeline
Decision Making in Complex Environments. Lecture 2 Ratings and Introduction to Analytic Network Process
 Decision Making in Complex Environments Lectre 2 Ratings and Introdction to Analytic Network Process Lectres Smmary Lectre 5 Lectre 1 AHP=Hierar chies Lectre 3 ANP=Networks Strctring Complex Models with
Decision Making in Complex Environments Lectre 2 Ratings and Introdction to Analytic Network Process Lectres Smmary Lectre 5 Lectre 1 AHP=Hierar chies Lectre 3 ANP=Networks Strctring Complex Models with
MEG 741 Energy and Variational Methods in Mechanics I
 MEG 74 Energ and Variational Methods in Mechanics I Brendan J. O Toole, Ph.D. Associate Professor of Mechanical Engineering Howard R. Hghes College of Engineering Universit of Nevada Las Vegas TBE B- (7)
MEG 74 Energ and Variational Methods in Mechanics I Brendan J. O Toole, Ph.D. Associate Professor of Mechanical Engineering Howard R. Hghes College of Engineering Universit of Nevada Las Vegas TBE B- (7)
An Investigation into Estimating Type B Degrees of Freedom
 An Investigation into Estimating Type B Degrees of H. Castrp President, Integrated Sciences Grop Jne, 00 Backgrond The degrees of freedom associated with an ncertainty estimate qantifies the amont of information
An Investigation into Estimating Type B Degrees of H. Castrp President, Integrated Sciences Grop Jne, 00 Backgrond The degrees of freedom associated with an ncertainty estimate qantifies the amont of information
ρ u = u. (1) w z will become certain time, and at a certain point in space, the value of
 w z will become certain time, and at a certain point in space, the value of") THE CONDITIONS NECESSARY FOR DISCONTINUOUS MOTION IN GASES G I Taylor Proceedings of the Royal Society A vol LXXXIV (90) pp 37-377 The possibility of the propagation of a srface of discontinity in a gas
THE CONDITIONS NECESSARY FOR DISCONTINUOUS MOTION IN GASES G I Taylor Proceedings of the Royal Society A vol LXXXIV (90) pp 37-377 The possibility of the propagation of a srface of discontinity in a gas
When are Two Numerical Polynomials Relatively Prime?
 J Symbolic Comptation (1998) 26, 677 689 Article No sy980234 When are Two Nmerical Polynomials Relatively Prime? BERNHARD BECKERMANN AND GEORGE LABAHN Laboratoire d Analyse Nmériqe et d Optimisation, Université
J Symbolic Comptation (1998) 26, 677 689 Article No sy980234 When are Two Nmerical Polynomials Relatively Prime? BERNHARD BECKERMANN AND GEORGE LABAHN Laboratoire d Analyse Nmériqe et d Optimisation, Université
Interest Point Detection. Lecture-4
 nterest Point Detection Lectre-4 Contents Harris Corner Detector Sm o Sqares Dierences (SSD Corrleation Talor Series Eigen Vectors and Eigen Vales nariance and co-ariance What is an interest point Epressie
nterest Point Detection Lectre-4 Contents Harris Corner Detector Sm o Sqares Dierences (SSD Corrleation Talor Series Eigen Vectors and Eigen Vales nariance and co-ariance What is an interest point Epressie
Shooting Method for Ordinary Differential Equations Autar Kaw
 Shooting Method or Ordinary Dierential Eqations Atar Kaw Ater reading this chapter, yo shold be able to. learn the shooting method algorithm to solve bondary vale problems, and. apply shooting method to
Shooting Method or Ordinary Dierential Eqations Atar Kaw Ater reading this chapter, yo shold be able to. learn the shooting method algorithm to solve bondary vale problems, and. apply shooting method to
Step-Size Bounds Analysis of the Generalized Multidelay Adaptive Filter
 WCE 007 Jly - 4 007 London UK Step-Size onds Analysis of the Generalized Mltidelay Adaptive Filter Jnghsi Lee and Hs Chang Hang Abstract In this paper we analyze the bonds of the fixed common step-size
WCE 007 Jly - 4 007 London UK Step-Size onds Analysis of the Generalized Mltidelay Adaptive Filter Jnghsi Lee and Hs Chang Hang Abstract In this paper we analyze the bonds of the fixed common step-size