Comparison between LETKF and EnVAR with observation localization
|
|
|
- Kevin Dorsey
- 5 years ago
- Views:
Transcription
1 Comprson beeen LETKF nd EnVAR h observon loclzon * Sho Yoo Msru Kun Kzums Aonsh Se Orguch Le Duc Tuy Kb 3 Tdsh Tsuyu Meeorologcl Reserch Insue JAMSTEC 3 Meeorologcl College 6..7 D Assmlon Semnr n RIKEN/AICS
2 Bcground covrnce o o solve o o clcule 3DVAR4DVAR Ssc Implcly Wh don o M nd EnKF Ensemble-bsed Eplcly Ensemble ppromon ybrd-4dvar Ensemble-bsed Implcly Wh don o M nd EnVAR Ensemble-bsed Implcly Ensemble ppromon Ensemble-bsed vronl d ssmlon Inroducon T T M M J y R y B T M M J J y R B Cos Funcon Byesn ssmlon provdes Anlyss rom Frs guess nd Observon y. es mmum lelhood vlue hen cos uncon J s mnmum ( J=). Severl mehods re clssed usng ho o solve J=. Bcground erm Observon erm Grden EnVAR provdes nlyss mplcly hou don models /33
3 Inroducon Why s J= solved mplcly? 3/33 Cos Funcon J Bcground erm T B M Observon erm T y R M y J b J o Qudrc uncon o - Qudrc uncon o (M ( )) (M ( ))-y Gussn ppromon Observon (M ( )) erm s srcly s ppromed reed o qudrc uncon o by ssumng lner (M ( )) J E Im Implc mehod s beer becuse observon operor re srcly reed J= s chnged cn be solved by solvng eplcly J= e.g. mplcly EnKF
4 Inroducon Prevous sudes bou EnVAR 4/33 Zupns (5) Zupns e l. (8) EnVAR mehod s suggesed Lu e l. (8 9) Buehner (3) 4D-EnVAR s compred o oher mehods Gussn ppromon Splly loclzed bcground covrnce un e l. (4) 4D-EnKF s suggesed Any me nlyss n ssmlon ndo s provded Assmlon ndo Lu e l. (8) 3D-EnKFEnVAR 4D-EnKFEnVAR n- me n n- me In hs sudy 4D-EnVAR s compred o 4D-EnKF (LETKF) n
5 Conens 5/33. Inroducon. Formulon o EnVAR h observon loclzon 3. Comprson beeen LETKF nd EnVAR. Sngle-observon ssmlon. OSSEs h SPEEDY model 3. Rel observon d ssmlon h JMANM
6 OSSE Observon sysem smulon epermens h SPEEDY model Number o members: Assmlon ndo: 6 hours Loclzon rdus: σ =(m) σ V =.(sgm) Observons: U V T R Ps Inlon: Mulplcve (=.) Anlyss me: Cener o he ndo (=3h) Observon me: =h 3h 5h Posons o observons 6/33 Bs o specc humdy 6-hour orecs (g/g) o nure run RMSE o specc humdy 6-hour orecs (g/g) o nure run Number o orecs-nlyss cycles (every 6 hour) Bs nd RMSE o EnVAR re smller hn hose o LETKF
7 Formulon 7/33 EnVAR ormulon Mulplcve nlon Bcground Anlyss error covrnce B T L M : nlyss pons : observon pons : me slos : ensemble members Anlyss vluble s rnsormed rom o J Grden o J Then M Loclzon Perurbon o L R y Observon error vrnce - Observon loclzon - Derved rom Bcground loclzon - Globlly dened J Observon operor (non-lner) Smlr o LETKF Deren rom LETKF
8 EnVAR hou loclzon Formulon Weghed summon o ensemble perurbons s dded o rs guess ) ( y R M J C: Zupns e l. (8) T T J y R y B y R J B y R M J M B 8/33 Cos uncon: Componens ormulon: Appromon o B usng ensemble ere Solve or nd gn : grd pons(-n) : obs. pons(-k) : me slos(-t) : members(-m)
9 EnVAR h observon loclzon Formulon M B l l l L / ~ L M B l l l L L L / / l l y R M J ~ ~ ~ ~ ~ l l l y R M J l: grd pons(-n) : obs. pons(-k) : me slos(-t) : members(-m) The number o ensemble members s usully oo smll o me nlyss h lrge degree o reedom. Loclzon requred or ncresng degree o reedom o Then cos uncon: Grden o cos uncon: Loclzon cor (I grd s r rom grd s smll or.) o s hs clculed? 9/33 Mulplcve nlon prmeer
10 EnVAR h observon loclzon Formulon ~ ~ ~ l l l y R M J N N N l N N l l N N l l l L L L / / / ~ ~ /33 l: grd pons(-n) : obs. pons(-k) : me slos(-t) : members(-m) ere Usng ollong equon l l l L / ~ I nd re compleely on he sme pon s sme s. (Then depends only on he vluble on he grd.) / L l
11 Formulon o o solve J= /33 ~ J ~ l J M ~ l R y / l Ll L l / l L / l ~ J ~ J M l ~ No ndependen or nlyss pons l M L R Independenly clculed or every nlyss pons R L y y Usng ollong equon / / L L l L l l L / l ~ l l Observon loclzon Appromed ne cos uncon s dened l: grd pons(-n) : obs. pons(-k) : me slos(-t) : members(-m)
12 Formulon Summry o EnVAR ormulon /33 Anlyss J J T M M L y R Observon error vrnce L y R Anlyss perurbon J M T M δ / U Loclzon cer U L R Observon operor U Egenvlue decomposon o essn mr o J Mnmzon o globlly dened J h observon loclzon U : nlyss pons : observon pons : me slos : ensemble members
13 Formulon [] (Locl or Globl) LETKF Derence beeen LETKF nd EnVAR EnVAR EnVAR clcules drecly I s lner nd nlyss pon s sme s observon pon EnVAR=LETKF LETKF EnVAR Clculed h nlyss pon Independenly or ech nlyss [] Grden o (round Frs guess or Anlyss) δ n EnVAR s round nlyss I s lner EnVAR=LETKF 3/33 Clculed h observon pon or ll nlyss Observon pon Anlyss pon : nlyss pons : observon pons : me slos : ensemble members
 σv=.(sgm) Observons: U=5m/s @N8E σ=.")
 U=-.")
14 4/33 Sngle-observon ssmlon Comprson o LETKF (Lner cse) Number o members: Loclzon rdus: σ=(m) σv=.(sgm) Observons: σ=.835 Frs guess o relve humdy nd horzonl nd U=-9.8 m s- Anlyss-Frs guess (LETKF) U=-.9 m s- Anlyss-Frs guess (EnVAR) U=-.9 m s- Incremen o EnVAR s sme s LETKF observon pon bu smller r rom observon pon ( severer loclzon)
15 Sngle-observon ssmlon Why s EnVAR loclzon severer hn LETKF? 5/33 Observon loclzon o hs EnVAR s derved rom bcground loclzon bu h o LETKF s no. e.g. In o nlyss pons nd one observon K y nd Bcground loclzon K K Then B B R LB B R K (Greybush e l. ) K K Observon loclzon o LETKF K K B B B R B R B LB B R / L LB R B B B R B R Bloclzon Rloclzon K Thereore bcground L loclzon s severer
 R=44. % Anlyss-Frs guess (EnVAR) R=39.")
16 6/33 Sngle-observon ssmlon Comprson o LETKF (Non-lner cse) Number o members: Loclzon rdus: σ=(m) σv=.(sgm) Observons: σ=.835 Frs guess o relve humdy nd horzonl nd R=53. % Anlyss-Frs guess (LETKF) R=44. % Anlyss-Frs guess (EnVAR) R=39.6 % EnVAR nlyss s closer o observon hn LETKF
 Anlyss me: cener o he ndo Observon me: =h 3h 5h Posons o observons 7/33 Bs o specc humdy 6-hour orecs (g/g) o nure run RMSE o specc humdy 6-hour orecs (g/g) o nure run Number o orecs-nlyss cycles")
17 OSSE Observon sysem smulon epermens h SPEEDY model Number o members: Assmlon ndo: 6 hours Loclzon rdus: σ =(m) σ V =.(sgm) Observons: U V T R Ps Inlon: Mulplcve (=.) Anlyss me: cener o he ndo Observon me: =h 3h 5h Posons o observons 7/33 Bs o specc humdy 6-hour orecs (g/g) o nure run RMSE o specc humdy 6-hour orecs (g/g) o nure run Number o orecs-nlyss cycles (every 6 hour) EnVAR s beer cused by derence o ho o clcule nd δ
18 OSSE O-F sgrm Observon-Forecs (O-F) hsogrm n ll EnVAR nlyss 8/33 Specc humdy ssmlon: Lner bu non-gussn probbly dsrbuon
19 OSSE Specc humdy ssmlon 9/33 LETKF EnVAR Bs o specc humdy 6-hour orecs (g/g) o nure run Thc: relve humdy ssmlon (CTL) Thn: specc humdy ssmlon RMSE o specc humdy 6-hour orecs (g/g) o nure run EnVAR s beer hn LETKF nd relve humdy ssmlon s beer hn specc humdy ssmlon
20 OSSE EnVAR h loclly dened cos uncon Locl J s mnmzed mplcly Bs o specc humdy 6-hour orecs (g/g) o nure run Clclon me (sec) /33 > 6 RMSE o specc humdy 6-hour orecs (g/g) o nure run Blc: LETKF Red: EnVAR h Globl J Blue: EnVAR h Locl J Globlly dened clculed h observon pon Loclly dened clculed h nlyss pon Smlr o LETKF Globl J hs good mpc
 Green: EnVAR (sop er 5 erons) Blue: EnVAR (sop er erons) EnVAR h 5 erons s beer hn LETKF (clculon me s -3 mes s long s")
21 OSSE EnVAR h he specc number o eron /33 Bs o specc humdy 6-hour orecs (g/g) o nure run -3 RMSE o specc humdy 6-hour orecs (g/g) o nure run Blc: LETKF Red: EnVAR (CTL) Green: EnVAR (sop er 5 erons) Blue: EnVAR (sop er erons) EnVAR h 5 erons s beer hn LETKF (clculon me s -3 mes s long s LETKF)
22 Summry o OSSEs /33 We developed EnVAR h observon loclzon nd compred o LETKF EnVAR nlyss s closer o rue vlue hn LETKF becuse globlly dened cos uncon s mnmzed Severl mes longer clculon me hn LETKF Non-lner observon operor s srcly reed n EnVAR (Gussn ppromon should no be used) Observon loclzon o hs EnVAR s sme s bcground loclzon ( severer hn loclzon o LETKF) Is EnVAR lso beer hn LETKF n rel obs. d ssmlon?
 - To precpon")
 MSM (nl: 8JST) Dense")
23 Rel d ssmlon 3/33 Locl Rnll on 8 July 3 5 6JST 6 7JST 7 8JST 8 9JST 9 JST JST Anlyzed precpon MSM (nl: 5JST) - To precpon sysems ere genered. - Accure orecs s dcul. (even hough he nl condon ncluded rnll) MSM (nl: 8JST) Dense observons re epeced o mprove orecss
24 Rel d ssmlon Assmled Dense Observons 4/33 Observon Elemens Frequency Surce (JMA Surce observon nd AMeDAS) U V T every mnues GNSS PWV every mnues Rdr Rdl nd every mnues Ksh ned Nr Rdosonde U V T R every 3 hours Tsuub Ur Yoosu Ryou Mru Seng orzonl loclzon: m Vercl loclzon:. lnp (PWV s no loclzed verclly) Mulplcve nlon prmeer:. Observon error: U V: m/s T: K R: % PWV: 5 g/m Rdl nd: 3 m/s Surce nd (m/s) 7/8 8JST GNSS PWV (g/m ) 7/8 8JST :Rdr :Sonde

 Domn Trge: Locl rn ner Toyo n 378")
25 Rel d ssmlon Flo o Assmlon Epermens 5/33 Boundry condon: JMA GSM Forecs + Weely Ensemble Perurbon 376 9JST JST 378 6JST 378 9JST 378 JST 378 5JST 378 8JST Ouer Grd nervl: m Grd number: Ensemble sze: 5 Anlyss ndo: 3 hour (Operonl Observons used n JMA Meso-DA every 3 mnues) Donsclng 9JST- 5 Members Boundry Condon every 3 mnues Inner Grd nervl: m Grd number: 6 Ensemble sze: 5 Anlyss ndo: hour 5JST 6JST 7JST 8JST Eended Forecs : Ensemble Forecss : Anlyss (LETKF or EnVAR) Domn Trge: Locl rn ner Toyo n JST
 EnVAR-NSONDE (/o")

26 Rel d ssmlon 9JST Comprson o -h Rnll n 8-9 JST 8JST 9JST 6/33 EnVAR EnVAR-NPWV (/o PWV d) EnVAR-NSONDE (/o Sonde d) LETKF NDA (/o ny d) Anlyzed precpon Good mpcs o PWV nd Sonde d ssmlon Domn o clcule he score Trge o sensvy

27 Rel d ssmlon Are Frcons Sll Scores mproved? 7/33 FSS O F O F 9JST- 5JST 6JST 7JST 8JST O F : number densy o observed rnll n -h rcon : number densy o orecs rnll n -h rcon All our orecss rom EnVAR nlyses re beer hn NDA srong rn ghresoluon rn poson
![Rel d ssmlon Impc o Dense Observons 8/33 Rnll n 8-9 JST EnVAR EnVAR-NPWV (/o PWV d) EnVAR-NSONDE (/o Sonde d) [EnVAR] [NDA] [EnVAR]](/docs-images/81/83527415/images/28-1.jpg "[EnVAR-NPWV] - PWV d grely mproved rnll orecss. - Rdosonde d lso mproved e rn orecss.")
28 Rel d ssmlon Impc o Dense Observons 8/33 Rnll n 8-9 JST EnVAR EnVAR-NPWV (/o PWV d) EnVAR-NSONDE (/o Sonde d) [EnVAR] [NDA] [EnVAR] [EnVAR-NPWV] - PWV d grely mproved rnll orecss. - Rdosonde d lso mproved e rn orecss. [EnVAR] [EnVAR-NSONDE] Boh PWV nd rdosonde d could mprove rnll orecss

29 Rel d ssmlon EnVAR v.s. LETKF Rnll n 8-9 JST EnVAR LETKF [EnVAR] [NDA] 9/33 - Derence beeen EnVAR nd LETKF s smll Tme seres o RMS o (O A) nd (O F) o PWV n he orecs-nlyss cycles [EnVAR] [LETKF] In EnVAR srong rnll (> 5 mm/hr) orecss re slghly beer hn h o LETKF
30 Rel d ssmlon Correlon beeen Rnll nd Inl Ses Correlon beeen J nd n CORR( ) m J m m J m( ) m( ) J J ( ) ( ) m m m m 3/33 m er vpor nd nds o EnVAR nlyss : grd number m: ensemble member Lrge grden J m m : -h rnll (8 9JST) verged n hs re ( ) : vrbles n m hegh 8JST I nds pon o he drecon o vecors n hs gure rnll becomes sronger Lo-level convergence s correled o rnll nensy Convergence Posve correlon o er vpor Correlon beeen rnll nd m er vpor nd nds clculed by 5-member EnVAR






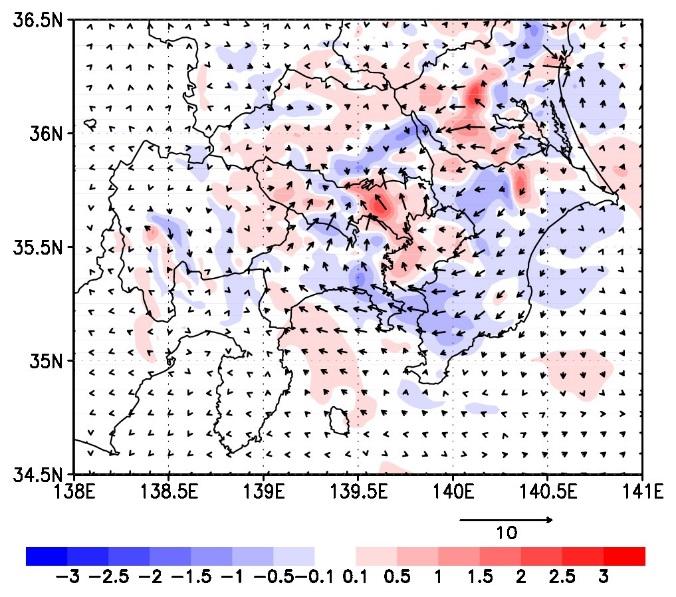








31 Rel d ssmlon 3/33 Derence o Lo-level vrbles [EnVAR] [EnVAR-NSONDE] [EnVAR] [EnVAR-NPWV] m er vpor nd nds o EnVAR nlyss Convergence Posve ncremen o er vpor [EnVAR] [LETKF] Locl ron? Derence o m er vpor nd nds Convergence Convergence Incremen o lo-level er vpor nd convergence mes rnll sronger Posve correlon o er vpor Correlon beeen rnll nd m er vpor nd nds clculed by 5-member EnVAR
32 Summry o Rel D Assmlon 3/33 We ssmled dense obs. or he locl rnll ner Toyo Impc o dense PWV nd Rdosonde obs. PWV mproved rnll orecs hrough correcng lo-level er vpor Sonde obs. mproved rnll orecs hrough correcng lo-level nds Comprson beeen LETKF nd EnVAR EnVAR cn me he nlyss hch s closer o obs. hn LETKF Improvemen o rnll orecs by usng EnVAR s smll Correlon o rnll bsed on ensemble orecss Lo-level er vpor nd convergence mde locl rnll sronger Are hese mpcs generl? Vercon n longer perod requres
33 Summry (EnVAR v.s. LETKF) Formulon Non-lner observon operor s more srcly reed n EnVAR Observon loclzon o EnVAR s sme s bcground loclzon ( severer hn loclzon o LETKF) OSSEs Anlyss o hs EnVAR lzon re more ccure hn LETKF becuse globlly dened cos uncon s mnmzed Rel observon d ssmlon PWV ssmlon n boh EnVAR nd LETKF mproved rnll orecs EnVAR nlyss s closer o obs. hn LETKF Improvemen o rnll orecs by usng EnVAR s smll n hs cse 33/33 Our reserch s suppored n pr by Sregc Progrm or Innovve Reserch (SPIRE) Feld 3 (proposl number: hp4 nd hp54) nd Toyo Meropoln Are Convecon Sudy or Ereme Weher Reslen Ces (TOMACS). SPEEDY-LETKF (hps://code.google.com/p/myosh/) nd he source code developed by Numercl Predcon Dvson n JMA re used n hs sudy. GNSS d ere provded rom he nd Lborory Meeorologcl Selle nd Observon Sysem Reserch Deprmen n MRI. Rdosonde observons ere conduced s pr o TOMACS progrm. The oher observon d ere rom JMA.
Data assimilation for local rainfall near Tokyo on 18 July 2013 using EnVAR with observation space localization
 Daa assimilaion for local rainfall near Tokyo on 18 July 2013 using EnVAR wih observaion space localizaion *1 Sho Yokoa, 1 Masaru Kunii, 1 Kazumasa Aonashi, 1 Seiji Origuchi, 2,1 Le Duc, 1 Takuya Kawabaa,
Daa assimilaion for local rainfall near Tokyo on 18 July 2013 using EnVAR wih observaion space localizaion *1 Sho Yokoa, 1 Masaru Kunii, 1 Kazumasa Aonashi, 1 Seiji Origuchi, 2,1 Le Duc, 1 Takuya Kawabaa,
Physics 201 Lecture 2
 Physcs 1 Lecure Lecure Chper.1-. Dene Poson, Dsplcemen & Dsnce Dsngush Tme nd Tme Inerl Dene Velocy (Aerge nd Insnneous), Speed Dene Acceleron Undersnd lgebrclly, hrough ecors, nd grphclly he relonshps
Physcs 1 Lecure Lecure Chper.1-. Dene Poson, Dsplcemen & Dsnce Dsngush Tme nd Tme Inerl Dene Velocy (Aerge nd Insnneous), Speed Dene Acceleron Undersnd lgebrclly, hrough ecors, nd grphclly he relonshps
Parameter estimation method using an extended Kalman Filter
 Unvers o Wollongong Reserch Onlne cul o Engneerng nd Inormon cences - Ppers: Pr A cul o Engneerng nd Inormon cences 007 Prmeer esmon mehod usng n eended lmn ler Emmnuel D. Blnchrd Unvers o Wollongong eblnch@uow.edu.u
Unvers o Wollongong Reserch Onlne cul o Engneerng nd Inormon cences - Ppers: Pr A cul o Engneerng nd Inormon cences 007 Prmeer esmon mehod usng n eended lmn ler Emmnuel D. Blnchrd Unvers o Wollongong eblnch@uow.edu.u
Decompression diagram sampler_src (source files and makefiles) bin (binary files) --- sh (sample shells) --- input (sample input files)
 bin (binary files) --- sh (sample shells) --- input (sample input files)") . Iroduco Probblsc oe-moh forecs gudce s mde b 50 esemble members mproved b Model Oupu scs (MO). scl equo s mde b usg hdcs d d observo d. We selec some prmeers for modfg forecs o use mulple regresso formul.
. Iroduco Probblsc oe-moh forecs gudce s mde b 50 esemble members mproved b Model Oupu scs (MO). scl equo s mde b usg hdcs d d observo d. We selec some prmeers for modfg forecs o use mulple regresso formul.
4.8 Improper Integrals
 4.8 Improper Inegrls Well you ve mde i hrough ll he inegrion echniques. Congrs! Unforunely for us, we sill need o cover one more inegrl. They re clled Improper Inegrls. A his poin, we ve only del wih inegrls
4.8 Improper Inegrls Well you ve mde i hrough ll he inegrion echniques. Congrs! Unforunely for us, we sill need o cover one more inegrl. They re clled Improper Inegrls. A his poin, we ve only del wih inegrls
Chapter Newton-Raphson Method of Solving a Nonlinear Equation
 Chpter 0.04 Newton-Rphson Method o Solvng Nonlner Equton Ater redng ths chpter, you should be ble to:. derve the Newton-Rphson method ormul,. develop the lgorthm o the Newton-Rphson method,. use the Newton-Rphson
Chpter 0.04 Newton-Rphson Method o Solvng Nonlner Equton Ater redng ths chpter, you should be ble to:. derve the Newton-Rphson method ormul,. develop the lgorthm o the Newton-Rphson method,. use the Newton-Rphson
Multivariate Time Series Analysis
 Mulvre me Sere Anl Le { : } be Mulvre me ere. Denon: () = men vlue uncon o { : } = E[ ] or. (,) = Lgged covrnce mr o { : } = E{[ - ()][ - ()]'} or, Denon: e me ere { : } onr e jon drbuon o,,, e me e jon
Mulvre me Sere Anl Le { : } be Mulvre me ere. Denon: () = men vlue uncon o { : } = E[ ] or. (,) = Lgged covrnce mr o { : } = E{[ - ()][ - ()]'} or, Denon: e me ere { : } onr e jon drbuon o,,, e me e jon
FINANCIAL ECONOMETRICS
 FINANCIAL ECONOMETRICS SPRING 07 WEEK IV NONLINEAR MODELS Prof. Dr. Burç ÜLENGİN Nonlner NONLINEARITY EXISTS IN FINANCIAL TIME SERIES ESPECIALLY IN VOLATILITY AND HIGH FREQUENCY DATA LINEAR MODEL IS DEFINED
FINANCIAL ECONOMETRICS SPRING 07 WEEK IV NONLINEAR MODELS Prof. Dr. Burç ÜLENGİN Nonlner NONLINEARITY EXISTS IN FINANCIAL TIME SERIES ESPECIALLY IN VOLATILITY AND HIGH FREQUENCY DATA LINEAR MODEL IS DEFINED
A Kalman filtering simulation
 A Klmn filering simulion The performnce of Klmn filering hs been esed on he bsis of wo differen dynmicl models, ssuming eiher moion wih consn elociy or wih consn ccelerion. The former is epeced o beer
A Klmn filering simulion The performnce of Klmn filering hs been esed on he bsis of wo differen dynmicl models, ssuming eiher moion wih consn elociy or wih consn ccelerion. The former is epeced o beer
Chapter Newton-Raphson Method of Solving a Nonlinear Equation
 Chpter.4 Newton-Rphson Method of Solvng Nonlner Equton After redng ths chpter, you should be ble to:. derve the Newton-Rphson method formul,. develop the lgorthm of the Newton-Rphson method,. use the Newton-Rphson
Chpter.4 Newton-Rphson Method of Solvng Nonlner Equton After redng ths chpter, you should be ble to:. derve the Newton-Rphson method formul,. develop the lgorthm of the Newton-Rphson method,. use the Newton-Rphson
September 20 Homework Solutions
 College of Engineering nd Compuer Science Mechnicl Engineering Deprmen Mechnicl Engineering A Seminr in Engineering Anlysis Fll 7 Number 66 Insrucor: Lrry Creo Sepember Homework Soluions Find he specrum
College of Engineering nd Compuer Science Mechnicl Engineering Deprmen Mechnicl Engineering A Seminr in Engineering Anlysis Fll 7 Number 66 Insrucor: Lrry Creo Sepember Homework Soluions Find he specrum
PHYS 1443 Section 001 Lecture #4
 PHYS 1443 Secon 001 Lecure #4 Monda, June 5, 006 Moon n Two Dmensons Moon under consan acceleraon Projecle Moon Mamum ranges and heghs Reerence Frames and relae moon Newon s Laws o Moon Force Newon s Law
PHYS 1443 Secon 001 Lecure #4 Monda, June 5, 006 Moon n Two Dmensons Moon under consan acceleraon Projecle Moon Mamum ranges and heghs Reerence Frames and relae moon Newon s Laws o Moon Force Newon s Law
Lump Solutions to a Jimbo-Miwa Like Equations
 Lump Soluons o Jmbo-Mw Lke Equons Hrun-Or-Roshd * M. Zulkr Al b Deprmen o Mhemcs Pbn Unvers o Scence nd Technolog Bngldesh b Deprmen o Mhemcs Rjshh Unvers Bngldesh * Eml: hrunorroshdmd@gml.com Absrc A
Lump Soluons o Jmbo-Mw Lke Equons Hrun-Or-Roshd * M. Zulkr Al b Deprmen o Mhemcs Pbn Unvers o Scence nd Technolog Bngldesh b Deprmen o Mhemcs Rjshh Unvers Bngldesh * Eml: hrunorroshdmd@gml.com Absrc A
Principle Component Analysis
 Prncple Component Anlyss Jng Go SUNY Bufflo Why Dmensonlty Reducton? We hve too mny dmensons o reson bout or obtn nsghts from o vsulze oo much nose n the dt Need to reduce them to smller set of fctors
Prncple Component Anlyss Jng Go SUNY Bufflo Why Dmensonlty Reducton? We hve too mny dmensons o reson bout or obtn nsghts from o vsulze oo much nose n the dt Need to reduce them to smller set of fctors
Lecture VI Regression
 Lecure VI Regresson (Lnear Mehods for Regresson) Conens: Lnear Mehods for Regresson Leas Squares, Gauss Markov heorem Recursve Leas Squares Lecure VI: MLSC - Dr. Sehu Vjayakumar Lnear Regresson Model M
Lecure VI Regresson (Lnear Mehods for Regresson) Conens: Lnear Mehods for Regresson Leas Squares, Gauss Markov heorem Recursve Leas Squares Lecure VI: MLSC - Dr. Sehu Vjayakumar Lnear Regresson Model M
e t dt e t dt = lim e t dt T (1 e T ) = 1
 = 1") Improper Inegrls There re wo ypes of improper inegrls - hose wih infinie limis of inegrion, nd hose wih inegrnds h pproch some poin wihin he limis of inegrion. Firs we will consider inegrls wih infinie
Improper Inegrls There re wo ypes of improper inegrls - hose wih infinie limis of inegrion, nd hose wih inegrnds h pproch some poin wihin he limis of inegrion. Firs we will consider inegrls wih infinie
Lecture 6: Learning for Control (Generalised Linear Regression)
") Lecure 6: Learnng for Conrol (Generalsed Lnear Regresson) Conens: Lnear Mehods for Regresson Leas Squares, Gauss Markov heorem Recursve Leas Squares Lecure 6: RLSC - Prof. Sehu Vjayakumar Lnear Regresson
Lecure 6: Learnng for Conrol (Generalsed Lnear Regresson) Conens: Lnear Mehods for Regresson Leas Squares, Gauss Markov heorem Recursve Leas Squares Lecure 6: RLSC - Prof. Sehu Vjayakumar Lnear Regresson
Background and Motivation: Importance of Pressure Measurements
 Imornce of Pressre Mesremens: Pressre s rmry concern for mny engneerng lcons e.g. lf nd form drg. Cvon : Pressre s of fndmenl mornce n ndersndng nd modelng cvon. Trblence: Velocy-Pressre-Grden ensor whch
Imornce of Pressre Mesremens: Pressre s rmry concern for mny engneerng lcons e.g. lf nd form drg. Cvon : Pressre s of fndmenl mornce n ndersndng nd modelng cvon. Trblence: Velocy-Pressre-Grden ensor whch
Unscented Transformation Unscented Kalman Filter
 Usceed rsformo Usceed Klm Fler Usceed rcle Fler Flerg roblem Geerl roblem Seme where s he se d s he observo Flerg s he problem of sequell esmg he ses (prmeers or hdde vrbles) of ssem s se of observos become
Usceed rsformo Usceed Klm Fler Usceed rcle Fler Flerg roblem Geerl roblem Seme where s he se d s he observo Flerg s he problem of sequell esmg he ses (prmeers or hdde vrbles) of ssem s se of observos become
1.B Appendix to Chapter 1
 Secon.B.B Append o Chper.B. The Ordnr Clcl Here re led ome mporn concep rom he ordnr clcl. The Dervve Conder ncon o one ndependen vrble. The dervve o dened b d d lm lm.b. where he ncremen n de o n ncremen
Secon.B.B Append o Chper.B. The Ordnr Clcl Here re led ome mporn concep rom he ordnr clcl. The Dervve Conder ncon o one ndependen vrble. The dervve o dened b d d lm lm.b. where he ncremen n de o n ncremen
Chapter 2 Linear Mo on
 Chper Lner M n .1 Aerge Velcy The erge elcy prcle s dened s The erge elcy depends nly n he nl nd he nl psns he prcle. Ths mens h prcle srs rm pn nd reurn bck he sme pn, s dsplcemen, nd s s erge elcy s
Chper Lner M n .1 Aerge Velcy The erge elcy prcle s dened s The erge elcy depends nly n he nl nd he nl psns he prcle. Ths mens h prcle srs rm pn nd reurn bck he sme pn, s dsplcemen, nd s s erge elcy s
ORDINARY DIFFERENTIAL EQUATIONS
 6 ORDINARY DIFFERENTIAL EQUATIONS Introducton Runge-Kutt Metods Mult-step Metods Sstem o Equtons Boundr Vlue Problems Crcterstc Vlue Problems Cpter 6 Ordnr Derentl Equtons / 6. Introducton In mn engneerng
6 ORDINARY DIFFERENTIAL EQUATIONS Introducton Runge-Kutt Metods Mult-step Metods Sstem o Equtons Boundr Vlue Problems Crcterstc Vlue Problems Cpter 6 Ordnr Derentl Equtons / 6. Introducton In mn engneerng
22.615, MHD Theory of Fusion Systems Prof. Freidberg Lecture 9: The High Beta Tokamak
 .65, MHD Theory of Fusion Sysems Prof. Freidberg Lecure 9: The High e Tokmk Summry of he Properies of n Ohmic Tokmk. Advnges:. good euilibrium (smll shif) b. good sbiliy ( ) c. good confinemen ( τ nr )
.65, MHD Theory of Fusion Sysems Prof. Freidberg Lecure 9: The High e Tokmk Summry of he Properies of n Ohmic Tokmk. Advnges:. good euilibrium (smll shif) b. good sbiliy ( ) c. good confinemen ( τ nr )
II The Z Transform. Topics to be covered. 1. Introduction. 2. The Z transform. 3. Z transforms of elementary functions
 II The Z Trnsfor Tocs o e covered. Inroducon. The Z rnsfor 3. Z rnsfors of eleenry funcons 4. Proeres nd Theory of rnsfor 5. The nverse rnsfor 6. Z rnsfor for solvng dfference equons II. Inroducon The
II The Z Trnsfor Tocs o e covered. Inroducon. The Z rnsfor 3. Z rnsfors of eleenry funcons 4. Proeres nd Theory of rnsfor 5. The nverse rnsfor 6. Z rnsfor for solvng dfference equons II. Inroducon The
Average & instantaneous velocity and acceleration Motion with constant acceleration
 Physics 7: Lecure Reminders Discussion nd Lb secions sr meeing ne week Fill ou Pink dd/drop form if you need o swich o differen secion h is FULL. Do i TODAY. Homework Ch. : 5, 7,, 3,, nd 6 Ch.: 6,, 3 Submission
Physics 7: Lecure Reminders Discussion nd Lb secions sr meeing ne week Fill ou Pink dd/drop form if you need o swich o differen secion h is FULL. Do i TODAY. Homework Ch. : 5, 7,, 3,, nd 6 Ch.: 6,, 3 Submission
T-Match: Matching Techniques For Driving Yagi-Uda Antennas: T-Match. 2a s. Z in. (Sections 9.5 & 9.7 of Balanis)
") 3/0/018 _mch.doc Pge 1 of 6 T-Mch: Mching Techniques For Driving Ygi-Ud Anenns: T-Mch (Secions 9.5 & 9.7 of Blnis) l s l / l / in The T-Mch is shun-mching echnique h cn be used o feed he driven elemen
3/0/018 _mch.doc Pge 1 of 6 T-Mch: Mching Techniques For Driving Ygi-Ud Anenns: T-Mch (Secions 9.5 & 9.7 of Blnis) l s l / l / in The T-Mch is shun-mching echnique h cn be used o feed he driven elemen
[ ] 2. [ ]3 + (Δx i + Δx i 1 ) / 2. Δx i-1 Δx i Δx i+1. TPG4160 Reservoir Simulation 2018 Lecture note 3. page 1 of 5
![[ ] 2. [ ]3 + (Δx i + Δx i 1 ) / 2. Δx i-1 Δx i Δx i+1. TPG4160 Reservoir Simulation 2018 Lecture note 3. page 1 of 5](/thumbs/85/92299540.jpg "[ ] 2. [ ]3 + (Δx i + Δx i 1 ) / 2. Δx i-1 Δx i Δx i+1. TPG4160 Reservoir Simulation 2018 Lecture note 3. page 1 of 5") TPG460 Reservor Smulaon 08 page of 5 DISCRETIZATIO OF THE FOW EQUATIOS As we already have seen, fne dfference appromaons of he paral dervaves appearng n he flow equaons may be obaned from Taylor seres
TPG460 Reservor Smulaon 08 page of 5 DISCRETIZATIO OF THE FOW EQUATIOS As we already have seen, fne dfference appromaons of he paral dervaves appearng n he flow equaons may be obaned from Taylor seres
CS434a/541a: Pattern Recognition Prof. Olga Veksler. Lecture 4
 CS434a/54a: Paern Recognon Prof. Olga Veksler Lecure 4 Oulne Normal Random Varable Properes Dscrmnan funcons Why Normal Random Varables? Analycally racable Works well when observaon comes form a corruped
CS434a/54a: Paern Recognon Prof. Olga Veksler Lecure 4 Oulne Normal Random Varable Properes Dscrmnan funcons Why Normal Random Varables? Analycally racable Works well when observaon comes form a corruped
Advanced Electromechanical Systems (ELE 847)
") (ELE 847) Dr. Smr ouro-rener Topc 1.4: DC moor speed conrol Torono, 2009 Moor Speed Conrol (open loop conrol) Consder he followng crcu dgrm n V n V bn T1 T 5 T3 V dc r L AA e r f L FF f o V f V cn T 4
(ELE 847) Dr. Smr ouro-rener Topc 1.4: DC moor speed conrol Torono, 2009 Moor Speed Conrol (open loop conrol) Consder he followng crcu dgrm n V n V bn T1 T 5 T3 V dc r L AA e r f L FF f o V f V cn T 4
Including the ordinary differential of distance with time as velocity makes a system of ordinary differential equations.
 Soluons o Ordnary Derenal Equaons An ordnary derenal equaon has only one ndependen varable. A sysem o ordnary derenal equaons consss o several derenal equaons each wh he same ndependen varable. An eample
Soluons o Ordnary Derenal Equaons An ordnary derenal equaon has only one ndependen varable. A sysem o ordnary derenal equaons consss o several derenal equaons each wh he same ndependen varable. An eample
4. Runge-Kutta Formula For Differential Equations. A. Euler Formula B. Runge-Kutta Formula C. An Example for Fourth-Order Runge-Kutta Formula
 NCTU Deprme o Elecrcl d Compuer Egeerg Seor Course By Pro. Yo-Pg Ce. Ruge-Ku Formul For Derel Equos A. Euler Formul B. Ruge-Ku Formul C. A Emple or Four-Order Ruge-Ku Formul
NCTU Deprme o Elecrcl d Compuer Egeerg Seor Course By Pro. Yo-Pg Ce. Ruge-Ku Formul For Derel Equos A. Euler Formul B. Ruge-Ku Formul C. A Emple or Four-Order Ruge-Ku Formul
Notes on the stability of dynamic systems and the use of Eigen Values.
 Noes on he sabl of dnamc ssems and he use of Egen Values. Source: Macro II course noes, Dr. Davd Bessler s Tme Seres course noes, zarads (999) Ineremporal Macroeconomcs chaper 4 & Techncal ppend, and Hamlon
Noes on he sabl of dnamc ssems and he use of Egen Values. Source: Macro II course noes, Dr. Davd Bessler s Tme Seres course noes, zarads (999) Ineremporal Macroeconomcs chaper 4 & Techncal ppend, and Hamlon
CHAPTER 10: LINEAR DISCRIMINATION
 CHAPER : LINEAR DISCRIMINAION Dscrmnan-based Classfcaon 3 In classfcaon h K classes (C,C,, C k ) We defned dscrmnan funcon g j (), j=,,,k hen gven an es eample, e chose (predced) s class label as C f g
CHAPER : LINEAR DISCRIMINAION Dscrmnan-based Classfcaon 3 In classfcaon h K classes (C,C,, C k ) We defned dscrmnan funcon g j (), j=,,,k hen gven an es eample, e chose (predced) s class label as C f g
Review: Transformations. Transformations - Viewing. Transformations - Modeling. world CAMERA OBJECT WORLD CSE 681 CSE 681 CSE 681 CSE 681
 Revew: Trnsforons Trnsforons Modelng rnsforons buld cople odels b posonng (rnsforng sple coponens relve o ech oher ewng rnsforons plcng vrul cer n he world rnsforon fro world coordnes o cer coordnes Perspecve
Revew: Trnsforons Trnsforons Modelng rnsforons buld cople odels b posonng (rnsforng sple coponens relve o ech oher ewng rnsforons plcng vrul cer n he world rnsforon fro world coordnes o cer coordnes Perspecve
ANOTHER CATEGORY OF THE STOCHASTIC DEPENDENCE FOR ECONOMETRIC MODELING OF TIME SERIES DATA
 Tn Corn DOSESCU Ph D Dre Cner Chrsn Unversy Buchres Consnn RAISCHI PhD Depren of Mhecs The Buchres Acdey of Econoc Sudes ANOTHER CATEGORY OF THE STOCHASTIC DEPENDENCE FOR ECONOMETRIC MODELING OF TIME SERIES
Tn Corn DOSESCU Ph D Dre Cner Chrsn Unversy Buchres Consnn RAISCHI PhD Depren of Mhecs The Buchres Acdey of Econoc Sudes ANOTHER CATEGORY OF THE STOCHASTIC DEPENDENCE FOR ECONOMETRIC MODELING OF TIME SERIES
EEM 486: Computer Architecture
 EEM 486: Compuer Archecure Lecure 4 ALU EEM 486 MIPS Arhmec Insrucons R-ype I-ype Insrucon Exmpe Menng Commen dd dd $,$2,$3 $ = $2 + $3 sub sub $,$2,$3 $ = $2 - $3 3 opernds; overfow deeced 3 opernds;
EEM 486: Compuer Archecure Lecure 4 ALU EEM 486 MIPS Arhmec Insrucons R-ype I-ype Insrucon Exmpe Menng Commen dd dd $,$2,$3 $ = $2 + $3 sub sub $,$2,$3 $ = $2 - $3 3 opernds; overfow deeced 3 opernds;
4. Runge-Kutta Formula For Differential Equations
 NCTU Deprme o Elecrcl d Compuer Egeerg 5 Sprg Course by Pro. Yo-Pg Ce. Ruge-Ku Formul For Derel Equos To solve e derel equos umerclly e mos useul ormul s clled Ruge-Ku ormul
NCTU Deprme o Elecrcl d Compuer Egeerg 5 Sprg Course by Pro. Yo-Pg Ce. Ruge-Ku Formul For Derel Equos To solve e derel equos umerclly e mos useul ormul s clled Ruge-Ku ormul
GAUSS ELIMINATION. Consider the following system of algebraic linear equations
 Numercl Anlyss for Engneers Germn Jordnn Unversty GAUSS ELIMINATION Consder the followng system of lgebrc lner equtons To solve the bove system usng clsscl methods, equton () s subtrcted from equton ()
Numercl Anlyss for Engneers Germn Jordnn Unversty GAUSS ELIMINATION Consder the followng system of lgebrc lner equtons To solve the bove system usng clsscl methods, equton () s subtrcted from equton ()
Sequential methods for ocean data assimilation. From theory to practical implementations (I)
") Sequenl ehods or ocen d sslon Fro heory o rccl leenons I P. BRASSEUR CNRS/LEGI, Grenoble, Frnce Perre.Brsseur@hg.ng.r J. Bllbrer, L. Berlne, F. Brol, J.M. Brnkr, G. Broque, V. Crlle, F. Csrucco, F. Debos,
Sequenl ehods or ocen d sslon Fro heory o rccl leenons I P. BRASSEUR CNRS/LEGI, Grenoble, Frnce Perre.Brsseur@hg.ng.r J. Bllbrer, L. Berlne, F. Brol, J.M. Brnkr, G. Broque, V. Crlle, F. Csrucco, F. Debos,
Relative controllability of nonlinear systems with delays in control
 Relave conrollably o nonlnear sysems wh delays n conrol Jerzy Klamka Insue o Conrol Engneerng, Slesan Techncal Unversy, 44- Glwce, Poland. phone/ax : 48 32 37227, {jklamka}@a.polsl.glwce.pl Keywor: Conrollably.
Relave conrollably o nonlnear sysems wh delays n conrol Jerzy Klamka Insue o Conrol Engneerng, Slesan Techncal Unversy, 44- Glwce, Poland. phone/ax : 48 32 37227, {jklamka}@a.polsl.glwce.pl Keywor: Conrollably.
Hidden Markov Model. a ij. Observation : O1,O2,... States in time : q1, q2,... All states : s1, s2,..., sn
 Hdden Mrkov Model S S servon : 2... Ses n me : 2... All ses : s s2... s 2 3 2 3 2 Hdden Mrkov Model Con d Dscree Mrkov Model 2 z k s s s s s s Degree Mrkov Model Hdden Mrkov Model Con d : rnson roly from
Hdden Mrkov Model S S servon : 2... Ses n me : 2... All ses : s s2... s 2 3 2 3 2 Hdden Mrkov Model Con d Dscree Mrkov Model 2 z k s s s s s s Degree Mrkov Model Hdden Mrkov Model Con d : rnson roly from
Jordan Journal of Physics
 Volume, Number, 00. pp. 47-54 RTICLE Jordn Journl of Physcs Frconl Cnoncl Qunzon of he Free Elecromgnec Lgrngn ensy E. K. Jrd, R. S. w b nd J. M. Khlfeh eprmen of Physcs, Unversy of Jordn, 94 mmn, Jordn.
Volume, Number, 00. pp. 47-54 RTICLE Jordn Journl of Physcs Frconl Cnoncl Qunzon of he Free Elecromgnec Lgrngn ensy E. K. Jrd, R. S. w b nd J. M. Khlfeh eprmen of Physcs, Unversy of Jordn, 94 mmn, Jordn.
BLOWUPS IN GAUGE AND CONSTRAINT MODES. Bernd Reimann, AEI in collaboration with M. Alcubierre, ICN (Mexico)
") BLOWUPS IN GAUGE AND CONSTRAINT MODES Bernd Remnn, AEI n ollboron M. Aluberre, ICN (Mexo) Jen, Jnury 30, 006 1 Tops Pologes ( soks nd bloups ) n sysems of PDEs Te soure rer for vodng bloups Evoluon Sysem:
BLOWUPS IN GAUGE AND CONSTRAINT MODES Bernd Remnn, AEI n ollboron M. Aluberre, ICN (Mexo) Jen, Jnury 30, 006 1 Tops Pologes ( soks nd bloups ) n sysems of PDEs Te soure rer for vodng bloups Evoluon Sysem:
An object moving with speed v around a point at distance r, has an angular velocity. m/s m
 Roion The mosphere roes wih he erh n moions wihin he mosphere clerly follow cure phs (cyclones, nicyclones, hurricnes, ornoes ec.) We nee o epress roion quniiely. For soli objec or ny mss h oes no isor
Roion The mosphere roes wih he erh n moions wihin he mosphere clerly follow cure phs (cyclones, nicyclones, hurricnes, ornoes ec.) We nee o epress roion quniiely. For soli objec or ny mss h oes no isor
Interval Estimation. Consider a random variable X with a mean of X. Let X be distributed as X X
 ECON 37: Ecoomercs Hypohess Tesg Iervl Esmo Wh we hve doe so fr s o udersd how we c ob esmors of ecoomcs reloshp we wsh o sudy. The queso s how comforble re we wh our esmors? We frs exme how o produce
ECON 37: Ecoomercs Hypohess Tesg Iervl Esmo Wh we hve doe so fr s o udersd how we c ob esmors of ecoomcs reloshp we wsh o sudy. The queso s how comforble re we wh our esmors? We frs exme how o produce
DEEP UNFOLDING FOR MULTICHANNEL SOURCE SEPARATION SUPPLEMENTARY MATERIAL
 DEEP UNFOLDING FOR MULTICHANNEL SOURCE SEPARATION SUPPLEMENTARY MATERIAL Sco Wsdom, John Hershey 2, Jonahan Le Roux 2, and Shnj Waanabe 2 Deparmen o Elecrcal Engneerng, Unversy o Washngon, Seale, WA, USA
DEEP UNFOLDING FOR MULTICHANNEL SOURCE SEPARATION SUPPLEMENTARY MATERIAL Sco Wsdom, John Hershey 2, Jonahan Le Roux 2, and Shnj Waanabe 2 Deparmen o Elecrcal Engneerng, Unversy o Washngon, Seale, WA, USA
Minimum Squared Error
 Minimum Squred Error LDF: Minimum Squred-Error Procedures Ide: conver o esier nd eer undersood prolem Percepron y i > for ll smples y i solve sysem of liner inequliies MSE procedure y i = i for ll smples
Minimum Squred Error LDF: Minimum Squred-Error Procedures Ide: conver o esier nd eer undersood prolem Percepron y i > for ll smples y i solve sysem of liner inequliies MSE procedure y i = i for ll smples
V.Abramov - FURTHER ANALYSIS OF CONFIDENCE INTERVALS FOR LARGE CLIENT/SERVER COMPUTER NETWORKS
 R&RATA # Vol.) 8, March FURTHER AALYSIS OF COFIDECE ITERVALS FOR LARGE CLIET/SERVER COMPUTER ETWORKS Vyacheslav Abramov School of Mahemacal Scences, Monash Unversy, Buldng 8, Level 4, Clayon Campus, Wellngon
R&RATA # Vol.) 8, March FURTHER AALYSIS OF COFIDECE ITERVALS FOR LARGE CLIET/SERVER COMPUTER ETWORKS Vyacheslav Abramov School of Mahemacal Scences, Monash Unversy, Buldng 8, Level 4, Clayon Campus, Wellngon
Calculus 241, section 12.2 Limits/Continuity & 12.3 Derivatives/Integrals notes by Tim Pilachowski r r r =, with a domain of real ( )
") Clculu 4, econ Lm/Connuy & Devve/Inel noe y Tm Plchow, wh domn o el Wh we hve o : veco-vlued uncon, ( ) ( ) ( ) j ( ) nume nd ne o veco The uncon, nd A w done wh eul uncon ( x) nd connuy e he componen
Clculu 4, econ Lm/Connuy & Devve/Inel noe y Tm Plchow, wh domn o el Wh we hve o : veco-vlued uncon, ( ) ( ) ( ) j ( ) nume nd ne o veco The uncon, nd A w done wh eul uncon ( x) nd connuy e he componen
Minimum Squared Error
 Minimum Squred Error LDF: Minimum Squred-Error Procedures Ide: conver o esier nd eer undersood prolem Percepron y i > 0 for ll smples y i solve sysem of liner inequliies MSE procedure y i i for ll smples
Minimum Squred Error LDF: Minimum Squred-Error Procedures Ide: conver o esier nd eer undersood prolem Percepron y i > 0 for ll smples y i solve sysem of liner inequliies MSE procedure y i i for ll smples
Contraction Mapping Principle Approach to Differential Equations
 epl Journl of Science echnology 0 (009) 49-53 Conrcion pping Principle pproch o Differenil Equions Bishnu P. Dhungn Deprmen of hemics, hendr Rn Cmpus ribhuvn Universiy, Khmu epl bsrc Using n eension of
epl Journl of Science echnology 0 (009) 49-53 Conrcion pping Principle pproch o Differenil Equions Bishnu P. Dhungn Deprmen of hemics, hendr Rn Cmpus ribhuvn Universiy, Khmu epl bsrc Using n eension of
Scattering at an Interface: Oblique Incidence
 Course Insrucor Dr. Raymond C. Rumpf Offce: A 337 Phone: (915) 747 6958 E Mal: rcrumpf@uep.edu EE 4347 Appled Elecromagnecs Topc 3g Scaerng a an Inerface: Oblque Incdence Scaerng These Oblque noes may
Course Insrucor Dr. Raymond C. Rumpf Offce: A 337 Phone: (915) 747 6958 E Mal: rcrumpf@uep.edu EE 4347 Appled Elecromagnecs Topc 3g Scaerng a an Inerface: Oblque Incdence Scaerng These Oblque noes may
S Radio transmission and network access Exercise 1-2
 S-7.330 Rdio rnsmission nd nework ccess Exercise 1 - P1 In four-symbol digil sysem wih eqully probble symbols he pulses in he figure re used in rnsmission over AWGN-chnnel. s () s () s () s () 1 3 4 )
S-7.330 Rdio rnsmission nd nework ccess Exercise 1 - P1 In four-symbol digil sysem wih eqully probble symbols he pulses in he figure re used in rnsmission over AWGN-chnnel. s () s () s () s () 1 3 4 )
CH.3. COMPATIBILITY EQUATIONS. Continuum Mechanics Course (MMC) - ETSECCPB - UPC
 - ETSECCPB - UPC") CH.3. COMPATIBILITY EQUATIONS Connuum Mechancs Course (MMC) - ETSECCPB - UPC Overvew Compably Condons Compably Equaons of a Poenal Vecor Feld Compably Condons for Infnesmal Srans Inegraon of he Infnesmal
CH.3. COMPATIBILITY EQUATIONS Connuum Mechancs Course (MMC) - ETSECCPB - UPC Overvew Compably Condons Compably Equaons of a Poenal Vecor Feld Compably Condons for Infnesmal Srans Inegraon of he Infnesmal
Simplified Variance Estimation for Three-Stage Random Sampling
 Deprmen of ppled Sscs Johnnes Kepler Unversy Lnz IFS Reserch Pper Seres 04-67 Smplfed rnce Esmon for Three-Sge Rndom Smplng ndres Quember Ocober 04 Smplfed rnce Esmon for Three-Sge Rndom Smplng ndres Quember
Deprmen of ppled Sscs Johnnes Kepler Unversy Lnz IFS Reserch Pper Seres 04-67 Smplfed rnce Esmon for Three-Sge Rndom Smplng ndres Quember Ocober 04 Smplfed rnce Esmon for Three-Sge Rndom Smplng ndres Quember
Use 10 m/s 2 for the acceleration due to gravity.
 ANSWERS Prjecle mn s he ecrl sum w ndependen elces, hrznl cmpnen nd ercl cmpnen. The hrznl cmpnen elcy s cnsn hrughu he mn whle he ercl cmpnen elcy s dencl ree ll. The cul r nsnneus elcy ny pn lng he prblc
ANSWERS Prjecle mn s he ecrl sum w ndependen elces, hrznl cmpnen nd ercl cmpnen. The hrznl cmpnen elcy s cnsn hrughu he mn whle he ercl cmpnen elcy s dencl ree ll. The cul r nsnneus elcy ny pn lng he prblc
MODELLING AND EXPERIMENTAL ANALYSIS OF MOTORCYCLE DYNAMICS USING MATLAB
 MODELLING AND EXPERIMENTAL ANALYSIS OF MOTORCYCLE DYNAMICS USING MATLAB P. Florn, P. Vrání, R. Čermá Fculy of Mechncl Engneerng, Unversy of Wes Bohem Asrc The frs pr of hs pper s devoed o mhemcl modellng
MODELLING AND EXPERIMENTAL ANALYSIS OF MOTORCYCLE DYNAMICS USING MATLAB P. Florn, P. Vrání, R. Čermá Fculy of Mechncl Engneerng, Unversy of Wes Bohem Asrc The frs pr of hs pper s devoed o mhemcl modellng
Go over vector and vector algebra Displacement and position in 2-D Average and instantaneous velocity in 2-D Average and instantaneous acceleration
 Mh Csquee Go oe eco nd eco lgeb Dsplcemen nd poson n -D Aege nd nsnneous eloc n -D Aege nd nsnneous cceleon n -D Poecle moon Unfom ccle moon Rele eloc* The componens e he legs of he gh ngle whose hpoenuse
Mh Csquee Go oe eco nd eco lgeb Dsplcemen nd poson n -D Aege nd nsnneous eloc n -D Aege nd nsnneous cceleon n -D Poecle moon Unfom ccle moon Rele eloc* The componens e he legs of he gh ngle whose hpoenuse
Chapters 2 Kinematics. Position, Distance, Displacement
 Chapers Knemacs Poson, Dsance, Dsplacemen Mechancs: Knemacs and Dynamcs. Knemacs deals wh moon, bu s no concerned wh he cause o moon. Dynamcs deals wh he relaonshp beween orce and moon. The word dsplacemen
Chapers Knemacs Poson, Dsance, Dsplacemen Mechancs: Knemacs and Dynamcs. Knemacs deals wh moon, bu s no concerned wh he cause o moon. Dynamcs deals wh he relaonshp beween orce and moon. The word dsplacemen
Supporting information How to concatenate the local attractors of subnetworks in the HPFP
 n Effcen lgorh for Idenfyng Prry Phenoype rcors of Lrge-Scle Boolen Newor Sng-Mo Choo nd Kwng-Hyun Cho Depren of Mhecs Unversy of Ulsn Ulsn 446 Republc of Kore Depren of Bo nd Brn Engneerng Kore dvnced
n Effcen lgorh for Idenfyng Prry Phenoype rcors of Lrge-Scle Boolen Newor Sng-Mo Choo nd Kwng-Hyun Cho Depren of Mhecs Unversy of Ulsn Ulsn 446 Republc of Kore Depren of Bo nd Brn Engneerng Kore dvnced
Software Reliability Growth Models Incorporating Fault Dependency with Various Debugging Time Lags
 Sofwre Relbly Growh Models Incorporng Ful Dependency wh Vrous Debuggng Tme Lgs Chn-Yu Hung 1 Chu-T Ln 1 Sy-Yen Kuo Mchel R. Lyu 3 nd Chun-Chng Sue 4 1 Deprmen of Compuer Scence Nonl Tsng Hu Unversy Hsnchu
Sofwre Relbly Growh Models Incorporng Ful Dependency wh Vrous Debuggng Tme Lgs Chn-Yu Hung 1 Chu-T Ln 1 Sy-Yen Kuo Mchel R. Lyu 3 nd Chun-Chng Sue 4 1 Deprmen of Compuer Scence Nonl Tsng Hu Unversy Hsnchu
Reinforcement Learning for a New Piano Mover s Problem
 Renforcemen Lernng for New Pno Mover s Problem Yuko ISHIWAKA Hkode Nonl College of Technology, Hkode, Hokkdo, Jpn Tomohro YOSHIDA Murorn Insue of Technology, Murorn, Hokkdo, Jpn nd Yuknor KAKAZU Reserch
Renforcemen Lernng for New Pno Mover s Problem Yuko ISHIWAKA Hkode Nonl College of Technology, Hkode, Hokkdo, Jpn Tomohro YOSHIDA Murorn Insue of Technology, Murorn, Hokkdo, Jpn nd Yuknor KAKAZU Reserch
Electromagnetic Transient Simulation of Large Power Transformer Internal Fault
 Inernonl Conference on Advnces n Energy nd Envronmenl Scence (ICAEES 5) Elecromgnec Trnsen Smulon of rge Power Trnsformer Inernl Ful Jun u,, Shwu Xo,, Qngsen Sun,c, Huxng Wng,d nd e Yng,e School of Elecrcl
Inernonl Conference on Advnces n Energy nd Envronmenl Scence (ICAEES 5) Elecromgnec Trnsen Smulon of rge Power Trnsformer Inernl Ful Jun u,, Shwu Xo,, Qngsen Sun,c, Huxng Wng,d nd e Yng,e School of Elecrcl
Motion. Part 2: Constant Acceleration. Acceleration. October Lab Physics. Ms. Levine 1. Acceleration. Acceleration. Units for Acceleration.
 Moion Accelerion Pr : Consn Accelerion Accelerion Accelerion Accelerion is he re of chnge of velociy. = v - vo = Δv Δ ccelerion = = v - vo chnge of velociy elpsed ime Accelerion is vecor, lhough in one-dimensionl
Moion Accelerion Pr : Consn Accelerion Accelerion Accelerion Accelerion is he re of chnge of velociy. = v - vo = Δv Δ ccelerion = = v - vo chnge of velociy elpsed ime Accelerion is vecor, lhough in one-dimensionl
INVESTIGATION OF HABITABILITY INDICES OF YTU GULET SERIES IN VARIOUS SEA STATES
 Brodogrdnj/Shpuldng Volume 65 Numer 3, 214 Ferd Ckc Muhsn Aydn ISSN 7-215X eissn 1845-5859 INVESTIGATION OF HABITABILITY INDICES OF YTU GULET SERIES IN VARIOUS SEA STATES UDC 629.5(5) Professonl pper Summry
Brodogrdnj/Shpuldng Volume 65 Numer 3, 214 Ferd Ckc Muhsn Aydn ISSN 7-215X eissn 1845-5859 INVESTIGATION OF HABITABILITY INDICES OF YTU GULET SERIES IN VARIOUS SEA STATES UDC 629.5(5) Professonl pper Summry
Introduction to Numerical Integration Part II
 Introducton to umercl Integrton Prt II CS 75/Mth 75 Brn T. Smth, UM, CS Dept. Sprng, 998 4/9/998 qud_ Intro to Gussn Qudrture s eore, the generl tretment chnges the ntegrton prolem to ndng the ntegrl w
Introducton to umercl Integrton Prt II CS 75/Mth 75 Brn T. Smth, UM, CS Dept. Sprng, 998 4/9/998 qud_ Intro to Gussn Qudrture s eore, the generl tretment chnges the ntegrton prolem to ndng the ntegrl w
HEAT CONDUCTION PROBLEM IN A TWO-LAYERED HOLLOW CYLINDER BY USING THE GREEN S FUNCTION METHOD
 Journal of Appled Mahemacs and Compuaonal Mechancs 3, (), 45-5 HEAT CONDUCTION PROBLEM IN A TWO-LAYERED HOLLOW CYLINDER BY USING THE GREEN S FUNCTION METHOD Sansław Kukla, Urszula Sedlecka Insue of Mahemacs,
Journal of Appled Mahemacs and Compuaonal Mechancs 3, (), 45-5 HEAT CONDUCTION PROBLEM IN A TWO-LAYERED HOLLOW CYLINDER BY USING THE GREEN S FUNCTION METHOD Sansław Kukla, Urszula Sedlecka Insue of Mahemacs,
EFFECT OF DISTANCES, SPACING AND NUMBER OF DOWELS IN A ROW ON THE LOAD CARRYING CAPACITY OF CONNECTIONS WITH DOWELS FAILING BY SPLITTING
 CIB-W8/5-7-7 INTERNATIONAL COUNCIL FOR RESEARCH AND INNOVATION IN BUILDIN AND CONSTRUCTION WORKIN COMMISSION W8 - TIMBER STRUCTURES EFFECT OF DISTANCES, SPACIN AND NUMBER OF DOWELS IN A ROW ON THE LOAD
CIB-W8/5-7-7 INTERNATIONAL COUNCIL FOR RESEARCH AND INNOVATION IN BUILDIN AND CONSTRUCTION WORKIN COMMISSION W8 - TIMBER STRUCTURES EFFECT OF DISTANCES, SPACIN AND NUMBER OF DOWELS IN A ROW ON THE LOAD
Privacy-Preserving Bayesian Network Parameter Learning
 4h WSEAS In. Conf. on COMUTATIONAL INTELLIGENCE, MAN-MACHINE SYSTEMS nd CYBERNETICS Mm, Flord, USA, November 7-9, 005 pp46-5) rvcy-reservng Byesn Nework rmeer Lernng JIANJIE MA. SIVAUMAR School of EECS,
4h WSEAS In. Conf. on COMUTATIONAL INTELLIGENCE, MAN-MACHINE SYSTEMS nd CYBERNETICS Mm, Flord, USA, November 7-9, 005 pp46-5) rvcy-reservng Byesn Nework rmeer Lernng JIANJIE MA. SIVAUMAR School of EECS,
Department of Economics University of Toronto
 Deparmen of Economcs Unversy of Torono ECO408F M.A. Economercs Lecure Noes on Heeroskedascy Heeroskedascy o Ths lecure nvolves lookng a modfcaons we need o make o deal wh he regresson model when some of
Deparmen of Economcs Unversy of Torono ECO408F M.A. Economercs Lecure Noes on Heeroskedascy Heeroskedascy o Ths lecure nvolves lookng a modfcaons we need o make o deal wh he regresson model when some of
Robustness Experiments with Two Variance Components
 Naonal Insue of Sandards and Technology (NIST) Informaon Technology Laboraory (ITL) Sascal Engneerng Dvson (SED) Robusness Expermens wh Two Varance Componens by Ana Ivelsse Avlés avles@ns.gov Conference
Naonal Insue of Sandards and Technology (NIST) Informaon Technology Laboraory (ITL) Sascal Engneerng Dvson (SED) Robusness Expermens wh Two Varance Componens by Ana Ivelsse Avlés avles@ns.gov Conference
Response of MDOF systems
 Response of MDOF syses Degree of freedo DOF: he nu nuber of ndependen coordnaes requred o deerne copleely he posons of all pars of a syse a any nsan of e. wo DOF syses hree DOF syses he noral ode analyss
Response of MDOF syses Degree of freedo DOF: he nu nuber of ndependen coordnaes requred o deerne copleely he posons of all pars of a syse a any nsan of e. wo DOF syses hree DOF syses he noral ode analyss
Solution in semi infinite diffusion couples (error function analysis)
") Soluon n sem nfne dffuson couples (error funcon analyss) Le us consder now he sem nfne dffuson couple of wo blocks wh concenraon of and I means ha, n a A- bnary sysem, s bondng beween wo blocks made of
Soluon n sem nfne dffuson couples (error funcon analyss) Le us consder now he sem nfne dffuson couple of wo blocks wh concenraon of and I means ha, n a A- bnary sysem, s bondng beween wo blocks made of
12d Model. Civil and Surveying Software. Drainage Analysis Module Detention/Retention Basins. Owen Thornton BE (Mech), 12d Model Programmer
, 12d Model Programmer") d Model Cvl and Surveyng Soware Dranage Analyss Module Deenon/Reenon Basns Owen Thornon BE (Mech), d Model Programmer owen.hornon@d.com 4 January 007 Revsed: 04 Aprl 007 9 February 008 (8Cp) Ths documen
d Model Cvl and Surveyng Soware Dranage Analyss Module Deenon/Reenon Basns Owen Thornon BE (Mech), d Model Programmer owen.hornon@d.com 4 January 007 Revsed: 04 Aprl 007 9 February 008 (8Cp) Ths documen
MODEL SOLUTIONS TO IIT JEE ADVANCED 2014
 MODEL SOLUTIONS TO IIT JEE ADVANCED Pper II Code PART I 6 7 8 9 B A A C D B D C C B 6 C B D D C A 7 8 9 C A B D. Rhc(Z ). Cu M. ZM Secon I K Z 8 Cu hc W mu hc 8 W + KE hc W + KE W + KE W + KE W + KE (KE
MODEL SOLUTIONS TO IIT JEE ADVANCED Pper II Code PART I 6 7 8 9 B A A C D B D C C B 6 C B D D C A 7 8 9 C A B D. Rhc(Z ). Cu M. ZM Secon I K Z 8 Cu hc W mu hc 8 W + KE hc W + KE W + KE W + KE W + KE (KE
II. Light is a Ray (Geometrical Optics)
") II Lgh s a Ray (Geomercal Opcs) IIB Reflecon and Refracon Hero s Prncple of Leas Dsance Law of Reflecon Hero of Aleandra, who lved n he 2 nd cenury BC, posulaed he followng prncple: Prncple of Leas Dsance:
II Lgh s a Ray (Geomercal Opcs) IIB Reflecon and Refracon Hero s Prncple of Leas Dsance Law of Reflecon Hero of Aleandra, who lved n he 2 nd cenury BC, posulaed he followng prncple: Prncple of Leas Dsance:
Appendix H: Rarefaction and extrapolation of Hill numbers for incidence data
 Anne Chao Ncholas J Goell C seh lzabeh L ander K Ma Rober K Colwell and Aaron M llson 03 Rarefacon and erapolaon wh ll numbers: a framewor for samplng and esmaon n speces dversy sudes cology Monographs
Anne Chao Ncholas J Goell C seh lzabeh L ander K Ma Rober K Colwell and Aaron M llson 03 Rarefacon and erapolaon wh ll numbers: a framewor for samplng and esmaon n speces dversy sudes cology Monographs
CS286.2 Lecture 14: Quantum de Finetti Theorems II
 CS286.2 Lecure 14: Quanum de Fne Theorems II Scrbe: Mara Okounkova 1 Saemen of he heorem Recall he las saemen of he quanum de Fne heorem from he prevous lecure. Theorem 1 Quanum de Fne). Le ρ Dens C 2
CS286.2 Lecure 14: Quanum de Fne Theorems II Scrbe: Mara Okounkova 1 Saemen of he heorem Recall he las saemen of he quanum de Fne heorem from he prevous lecure. Theorem 1 Quanum de Fne). Le ρ Dens C 2
Chapter Direct Method of Interpolation
 Chper 5. Direc Mehod of Inerpolion Afer reding his chper, you should be ble o:. pply he direc mehod of inerpolion,. sole problems using he direc mehod of inerpolion, nd. use he direc mehod inerpolns o
Chper 5. Direc Mehod of Inerpolion Afer reding his chper, you should be ble o:. pply he direc mehod of inerpolion,. sole problems using he direc mehod of inerpolion, nd. use he direc mehod inerpolns o
Obtaining the Optimal Order Quantities Through Asymptotic Distributions of the Stockout Duration and Demand
 he Seond Inernonl Symposum on Sohs Models n Relbly Engneerng Lfe Sene nd Operons Mngemen Obnng he Opml Order unes hrough Asympo Dsrbuons of he Sokou Duron nd Demnd Ann V Kev Nonl Reserh omsk Se Unversy
he Seond Inernonl Symposum on Sohs Models n Relbly Engneerng Lfe Sene nd Operons Mngemen Obnng he Opml Order unes hrough Asympo Dsrbuons of he Sokou Duron nd Demnd Ann V Kev Nonl Reserh omsk Se Unversy
Power Series Solutions for Nonlinear Systems. of Partial Differential Equations
 Appled Mhemcl Scences, Vol. 6, 1, no. 14, 5147-5159 Power Seres Soluons for Nonlner Sysems of Prl Dfferenl Equons Amen S. Nuser Jordn Unversy of Scence nd Technology P. O. Bo 33, Irbd, 11, Jordn nuser@us.edu.o
Appled Mhemcl Scences, Vol. 6, 1, no. 14, 5147-5159 Power Seres Soluons for Nonlner Sysems of Prl Dfferenl Equons Amen S. Nuser Jordn Unversy of Scence nd Technology P. O. Bo 33, Irbd, 11, Jordn nuser@us.edu.o
Variants of Pegasos. December 11, 2009
 Inroducon Varans of Pegasos SooWoong Ryu bshboy@sanford.edu December, 009 Youngsoo Cho yc344@sanford.edu Developng a new SVM algorhm s ongong research opc. Among many exng SVM algorhms, we wll focus on
Inroducon Varans of Pegasos SooWoong Ryu bshboy@sanford.edu December, 009 Youngsoo Cho yc344@sanford.edu Developng a new SVM algorhm s ongong research opc. Among many exng SVM algorhms, we wll focus on
5.1-The Initial-Value Problems For Ordinary Differential Equations
 5.-The Iniil-Vlue Problems For Ordinry Differenil Equions Consider solving iniil-vlue problems for ordinry differenil equions: (*) y f, y, b, y. If we know he generl soluion y of he ordinry differenil
5.-The Iniil-Vlue Problems For Ordinry Differenil Equions Consider solving iniil-vlue problems for ordinry differenil equions: (*) y f, y, b, y. If we know he generl soluion y of he ordinry differenil
RL for Large State Spaces: Policy Gradient. Alan Fern
 RL for Lrge Se Spce: Polcy Grden Aln Fern RL v Polcy Grden Serch So fr ll of our RL echnque hve red o lern n ec or pprome uly funcon or Q-funcon Lern opml vlue of beng n e or kng n con from e. Vlue funcon
RL for Lrge Se Spce: Polcy Grden Aln Fern RL v Polcy Grden Serch So fr ll of our RL echnque hve red o lern n ec or pprome uly funcon or Q-funcon Lern opml vlue of beng n e or kng n con from e. Vlue funcon
Normal Random Variable and its discriminant functions
 Noral Rando Varable and s dscrnan funcons Oulne Noral Rando Varable Properes Dscrnan funcons Why Noral Rando Varables? Analycally racable Works well when observaon coes for a corruped snle prooype 3 The
Noral Rando Varable and s dscrnan funcons Oulne Noral Rando Varable Properes Dscrnan funcons Why Noral Rando Varables? Analycally racable Works well when observaon coes for a corruped snle prooype 3 The
Chapter 6: AC Circuits
 Chaper 6: AC Crcus Chaper 6: Oulne Phasors and he AC Seady Sae AC Crcus A sable, lnear crcu operang n he seady sae wh snusodal excaon (.e., snusodal seady sae. Complee response forced response naural response.
Chaper 6: AC Crcus Chaper 6: Oulne Phasors and he AC Seady Sae AC Crcus A sable, lnear crcu operang n he seady sae wh snusodal excaon (.e., snusodal seady sae. Complee response forced response naural response.
Computing Relevance, Similarity: The Vector Space Model
 Compung Relevance, Smlary: The Vecor Space Model Based on Larson and Hears s sldes a UC-Bereley hp://.sms.bereley.edu/courses/s0/f00/ aabase Managemen Sysems, R. Ramarshnan ocumen Vecors v ocumens are
Compung Relevance, Smlary: The Vecor Space Model Based on Larson and Hears s sldes a UC-Bereley hp://.sms.bereley.edu/courses/s0/f00/ aabase Managemen Sysems, R. Ramarshnan ocumen Vecors v ocumens are
Isotropic Non-Heisenberg Magnet for Spin S=1
 Ierol Jourl of Physcs d Applcos. IN 974- Volume, Number (, pp. 7-4 Ierol Reserch Publco House hp://www.rphouse.com Isoropc No-Heseberg Mge for p = Y. Yousef d Kh. Kh. Mumov.U. Umrov Physcl-Techcl Isue
Ierol Jourl of Physcs d Applcos. IN 974- Volume, Number (, pp. 7-4 Ierol Reserch Publco House hp://www.rphouse.com Isoropc No-Heseberg Mge for p = Y. Yousef d Kh. Kh. Mumov.U. Umrov Physcl-Techcl Isue
Definition of Tracking
 Trckng Defnton of Trckng Trckng: Generte some conclusons bout the moton of the scene, objects, or the cmer, gven sequence of mges. Knowng ths moton, predct where thngs re gong to project n the net mge,
Trckng Defnton of Trckng Trckng: Generte some conclusons bout the moton of the scene, objects, or the cmer, gven sequence of mges. Knowng ths moton, predct where thngs re gong to project n the net mge,
Jackson 2.26 Homework Problem Solution Dr. Christopher S. Baird University of Massachusetts Lowell
 Jckson 2.26 Homework Problem Solution Dr. Christopher S. Bird University of Msschusetts Lowell PROBLEM: The two-dimensionl region, ρ, φ β, is bounded by conducting surfces t φ =, ρ =, nd φ = β held t zero
Jckson 2.26 Homework Problem Solution Dr. Christopher S. Bird University of Msschusetts Lowell PROBLEM: The two-dimensionl region, ρ, φ β, is bounded by conducting surfces t φ =, ρ =, nd φ = β held t zero
Displacement, Velocity, and Acceleration. (WHERE and WHEN?)
") Dsplacemen, Velocy, and Acceleraon (WHERE and WHEN?) Mah resources Append A n your book! Symbols and meanng Algebra Geomery (olumes, ec.) Trgonomery Append A Logarhms Remnder You wll do well n hs class
Dsplacemen, Velocy, and Acceleraon (WHERE and WHEN?) Mah resources Append A n your book! Symbols and meanng Algebra Geomery (olumes, ec.) Trgonomery Append A Logarhms Remnder You wll do well n hs class
Origin Destination Transportation Models: Methods
 In Jr. of Mhemcl Scences & Applcons Vol. 2, No. 2, My 2012 Copyrgh Mnd Reder Publcons ISSN No: 2230-9888 www.journlshub.com Orgn Desnon rnsporon Models: Mehods Jyo Gup nd 1 N H. Shh Deprmen of Mhemcs,
In Jr. of Mhemcl Scences & Applcons Vol. 2, No. 2, My 2012 Copyrgh Mnd Reder Publcons ISSN No: 2230-9888 www.journlshub.com Orgn Desnon rnsporon Models: Mehods Jyo Gup nd 1 N H. Shh Deprmen of Mhemcs,
5.2 Volumes: Disks and Washers
 4 pplictions of definite integrls 5. Volumes: Disks nd Wshers In the previous section, we computed volumes of solids for which we could determine the re of cross-section or slice. In this section, we restrict
4 pplictions of definite integrls 5. Volumes: Disks nd Wshers In the previous section, we computed volumes of solids for which we could determine the re of cross-section or slice. In this section, we restrict
principles, scales and applications
 Ippen Lecure Kul Lumpur 207 Cellulr Auom n ecohydrulcs modelng: prncples scles nd pplcons Quwen Chen Nnng Hydrulc Reserch Insue Chn PhD Progrm 935 2009 Rver Hydrulcs Por cos nd offshore. Wer resources
Ippen Lecure Kul Lumpur 207 Cellulr Auom n ecohydrulcs modelng: prncples scles nd pplcons Quwen Chen Nnng Hydrulc Reserch Insue Chn PhD Progrm 935 2009 Rver Hydrulcs Por cos nd offshore. Wer resources
Density Matrix Description of NMR BCMB/CHEM 8190
 Densy Marx Descrpon of NMR BCMBCHEM 89 Operaors n Marx Noaon Alernae approach o second order specra: ask abou x magnezaon nsead of energes and ranson probables. If we say wh one bass se, properes vary
Densy Marx Descrpon of NMR BCMBCHEM 89 Operaors n Marx Noaon Alernae approach o second order specra: ask abou x magnezaon nsead of energes and ranson probables. If we say wh one bass se, properes vary
Math 128b Project. Jude Yuen
 Mah 8b Proec Jude Yuen . Inroducon Le { Z } be a sequence of observed ndependen vecor varables. If he elemens of Z have a on normal dsrbuon hen { Z } has a mean vecor Z and a varancecovarance marx z. Geomercally
Mah 8b Proec Jude Yuen . Inroducon Le { Z } be a sequence of observed ndependen vecor varables. If he elemens of Z have a on normal dsrbuon hen { Z } has a mean vecor Z and a varancecovarance marx z. Geomercally
Mechanics Physics 151
 Mechancs Physcs 5 Lecure 0 Canoncal Transformaons (Chaper 9) Wha We Dd Las Tme Hamlon s Prncple n he Hamlonan formalsm Dervaon was smple δi δ Addonal end-pon consrans pq H( q, p, ) d 0 δ q ( ) δq ( ) δ
Mechancs Physcs 5 Lecure 0 Canoncal Transformaons (Chaper 9) Wha We Dd Las Tme Hamlon s Prncple n he Hamlonan formalsm Dervaon was smple δi δ Addonal end-pon consrans pq H( q, p, ) d 0 δ q ( ) δq ( ) δ
5.7 Improper Integrals
 458 pplictions of definite integrls 5.7 Improper Integrls In Section 5.4, we computed the work required to lift pylod of mss m from the surfce of moon of mss nd rdius R to height H bove the surfce of the
458 pplictions of definite integrls 5.7 Improper Integrls In Section 5.4, we computed the work required to lift pylod of mss m from the surfce of moon of mss nd rdius R to height H bove the surfce of the
Density Matrix Description of NMR BCMB/CHEM 8190
 Densy Marx Descrpon of NMR BCMBCHEM 89 Operaors n Marx Noaon If we say wh one bass se, properes vary only because of changes n he coeffcens weghng each bass se funcon x = h< Ix > - hs s how we calculae
Densy Marx Descrpon of NMR BCMBCHEM 89 Operaors n Marx Noaon If we say wh one bass se, properes vary only because of changes n he coeffcens weghng each bass se funcon x = h< Ix > - hs s how we calculae
GMM parameter estimation. Xiaoye Lu CMPS290c Final Project
 GMM paraeer esaon Xaoye Lu M290c Fnal rojec GMM nroducon Gaussan ure Model obnaon of several gaussan coponens Noaon: For each Gaussan dsrbuon:, s he ean and covarance ar. A GMM h ures(coponens): p ( 2π
GMM paraeer esaon Xaoye Lu M290c Fnal rojec GMM nroducon Gaussan ure Model obnaon of several gaussan coponens Noaon: For each Gaussan dsrbuon:, s he ean and covarance ar. A GMM h ures(coponens): p ( 2π