Deadlock. CSE 2431: Introduction to Operating Systems Reading: Chap. 7, [OSC]
|
|
|
- Howard Mitchell
- 6 years ago
- Views:
Transcription
1 Deadlock CSE 2431: Introduction to Operating Systems Reading: Chap. 7, [OSC] 1
2 Outline Resources Deadlock Deadlock Prevention Deadlock Avoidance Deadlock Detection Deadlock Recovery 2
3 Review: Synchronization Data races Critical regions and mutual exclusions Solutions: Peterson s solution TSL Semaphores & Mutex Monitor Message Passing Barrier Classic Synchronization Problems 3
4 Resource (1) A resource is a commodity needed by a process. Resources can be either: Serially reusable: e.g., CPU, memory, disk space, I/O devices, files. acquire use release Consumable: produced by a process, needed by a process; e.g., messages, buffers of information, interrupts. create acquire use Resource ceases to exist after it has been used, so it is not released. 4
5 Resource (2) Resources can also be either: Preemptible: e.g., CPU, central memory or Non-preemptible: e.g., tape drives. And resources can be either: Shared among several processes or Dedicated exclusively to a single process. 5
6 Outline Resources Deadlock Deadlock Prevention Deadlock Avoidance Deadlock Detection Deadlock Recovery 6
7 Using Semaphore to Share Resource Process P(); { A.Wait(); B.Wait(); 0 6 //use both resource B.Signal(); A.Signal(); } Process Q(); { A.Wait(); B.Wait(); //use both resource B.Signal(); A.Signal(); } External Semaphore A(1), B(1); 2 External Semaphore A(0), B(1); 3 External Semaphore A(0), B(0); 4 External Semaphore A(0), B(1); 5 External Semaphore A(1), B(1); 7
8 But Deadlock can Happen! 1 2 Process P(); 1 { A.Wait(); 3 B.Wait(); //use both resources B.Signal(); A.Signal(); } Process Q(); { B.Wait(); A.Wait(); //use both resources A.Signal(); B.Signal(); } 1 External Semaphore A(1), B(1); 2 External Semaphore A(0), B(1); 3 External Semaphore A(0), B(0); DEADLOCK! 8
9 Deadlock Mechanisms for Deadlock Control 9
10 Deadlock Definition What is a deadlock? A process is deadlocked if it is waiting for an event that will never occur. Typically, but not necessarily, more than one process will be involved together in a deadlock (the deadly embrace). Is deadlock the same as starvation (or infinitely postponed)? A process is infinitely postponed if it is delayed repeatedly over a long period of time while the attention of the system is given to other processes. i.e. logically the process may proceed but the system never gives it resources. 10
11 Conditions for Deadlock What conditions should exist in order to lead to a deadlock Real life analogy such as You take the monitor, I grab the keyboard Cars in intersection Your turn for real life analogies 11
12 Necessary Conditions for Deadlock Mutual exclusion Processes claim exclusive control of the resources they require Wait-for condition Processes hold resources already allocated to them while waiting for additional resources No preemption condition Resources cannot be removed from the processes holding them until used to completion Circular wait condition A circular chain of processes exists in which each process holds one or more resources that are requested by the next process in the chain 12
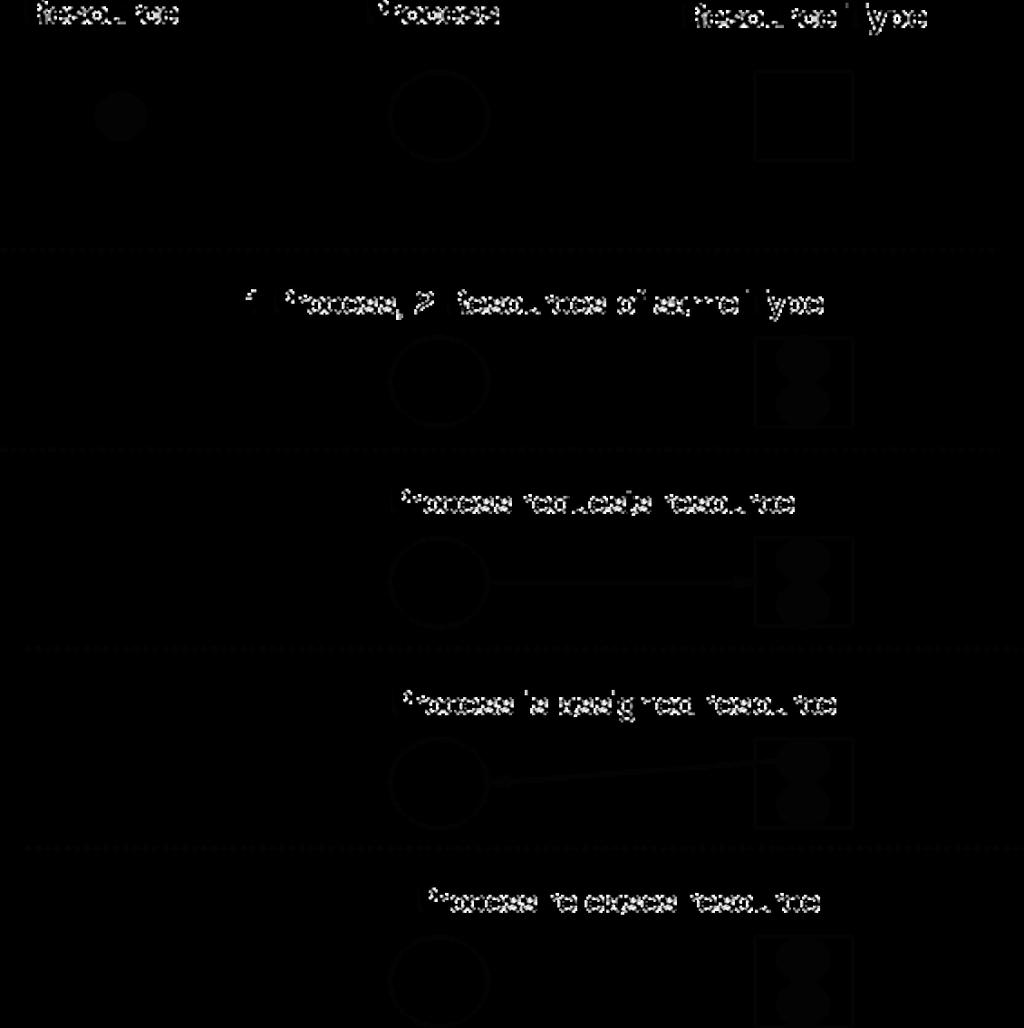
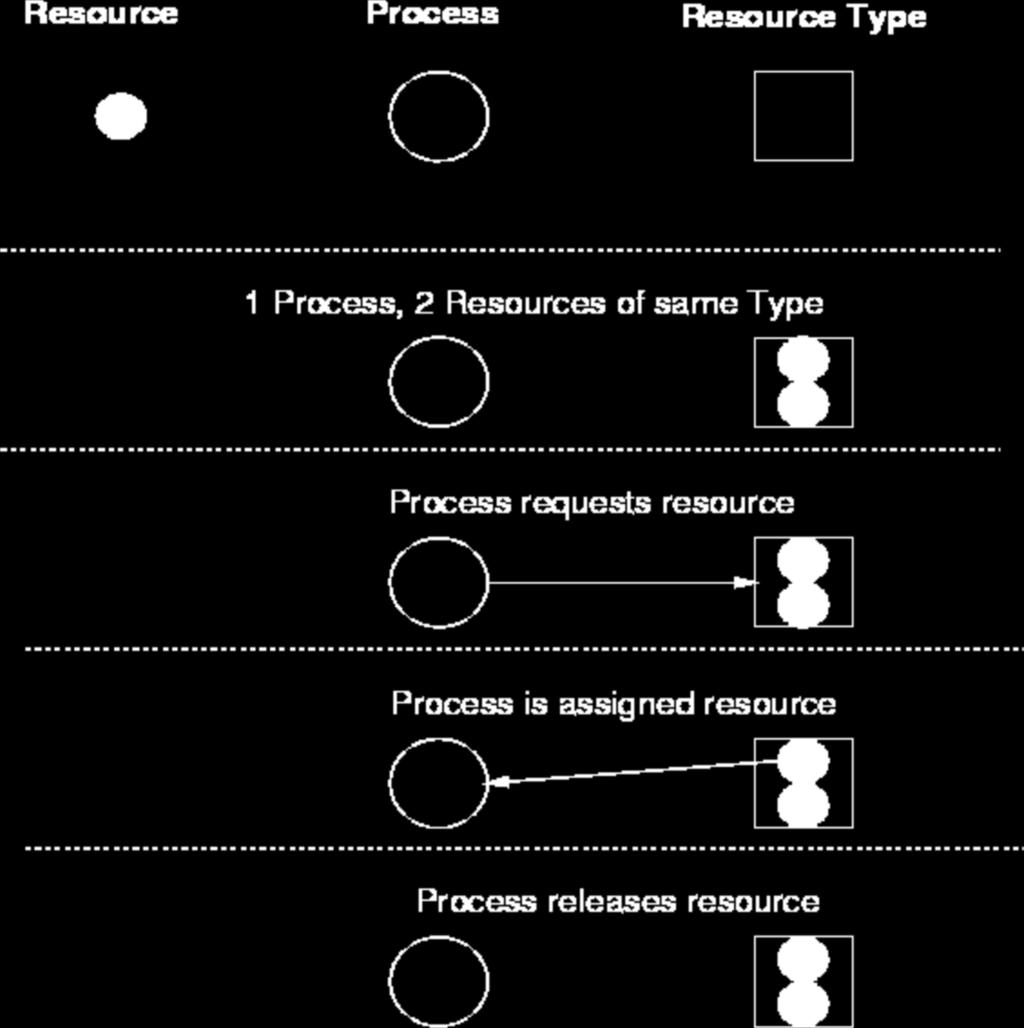
13 Resource Allocation Graph 13

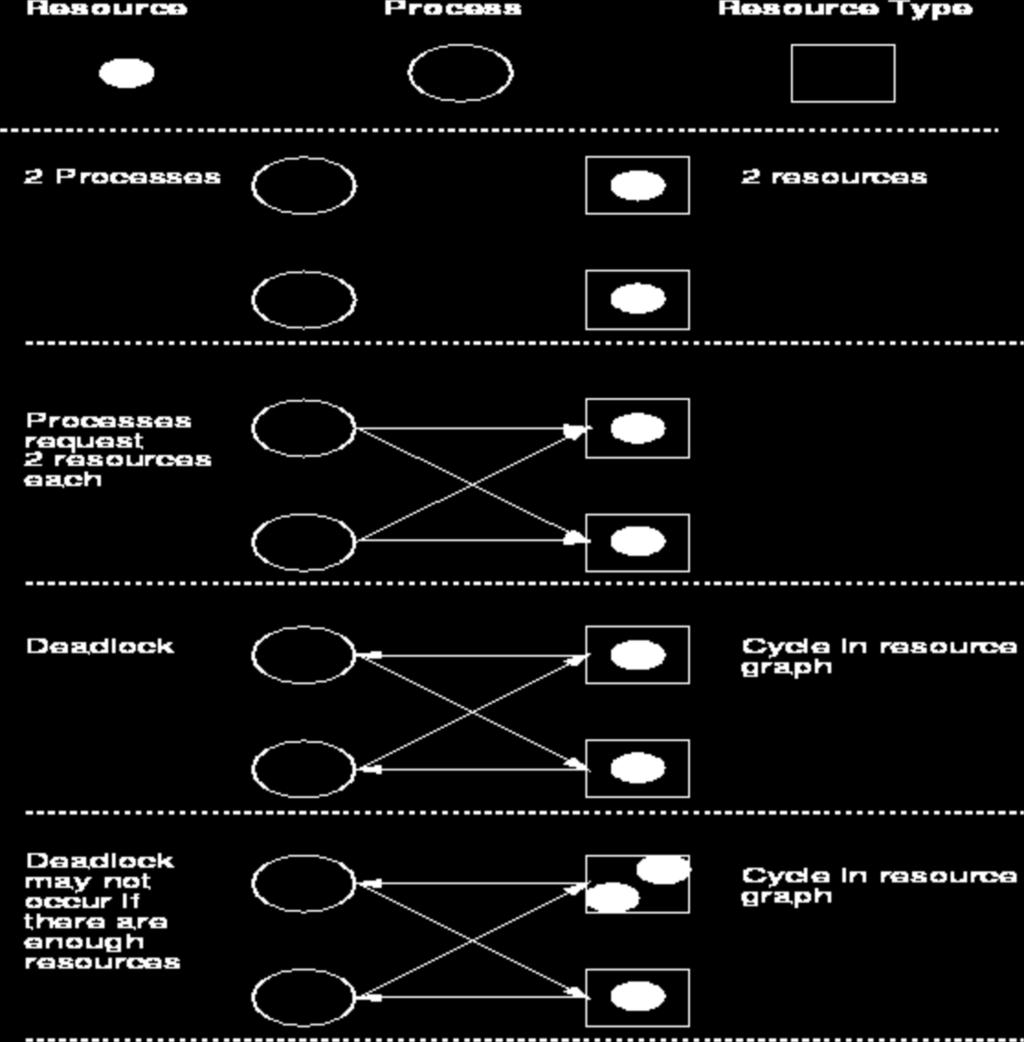
14 Deadlock Model 14
15 How To Deal With Deadlock? Prevention Design a system in such a way that deadlocks cannot occur, at least with respect to serially reusable resources. Avoidance Impose less stringent conditions than for prevention, allowing the possibility of deadlock, but sidestepping it as it approaches. Detection In a system that allows the possibility of deadlock, determine if deadlock has occurred, and which processes and resources are involved. Recovery After a deadlock has been detected, clear the problem, allowing the deadlocked processes to complete and the resources to be reused. Usually involves destroying the affected processes and restarting them. 15
16 Outline Resources Deadlock Deadlock Prevention Deadlock Avoidance Deadlock Detection Deadlock Recovery 16
17 The Ostrich Algorithm Guess: what is implemented in Linux? Don t do anything, simply restart the system (stick your head into the sand, pretend there is no problem at all). Rationale: make the common path faster and more reliable Deadlock prevention, avoidance or detection/recovery algorithms are expensive if deadlock occurs only rarely, it is not worth the overhead to implement any of these algorithms. 17
18 Deadlock Prevention: Havender s Algorithms Break one of the deadlock conditions. Mutual exclusion Solution: exclusive use of resources is an important feature, but for some resources (virtual memory, CPU), it is possible. Hold-and-Wait condition Solution: Force each process to request all required resources at once. It cannot proceed until all resources have been acquired. No preemption condition Solution: forcibly take away the resources assigned to the process due to lack of other requested resources. Circular wait condition Solution: All resource types are numbered. Processes must request resources in numerical order 18
19 Locking with Two Phases Phase One process tries to lock all records it needs, one at a time if needed record found locked, start over (no real work done in phase one) If phase one succeeds, it starts second phase performing updates releasing locks Note similarity to requesting all resources at once Problems? 19
20 Break Circular Wait Condition Request one resource at a time. Global ordering of resources Requests have to be made in increasing order Req(resource1), req(resource2).. Why no circular wait? Problems? 20
21 Summary: Deadlock Prevention Condition Mutual Exclusion Hold and wait No preemption Circular wait How to Break It Spool everything Request all resources initially Take resources away Order resources numerically 21
22 Review Resource: preemptible or non-preemptible Deadlock conditions Mutual exclusion Hold and wait Non-preemption Circular wait Deadlock prevention Break the condition Locking with two phases 22
23 Questions Design an algorithm to detect deadlocks? Single resource per type Multiple resources per type How to avoid deadlocks? How to recover from deadlocks? 23
24 Deadlock Avoidance The system needs to know the resource ahead of time Banker Algorithm (Dijkstra, 1965) Each customer tells banker the maximum number of resources it needs Customer borrows resources from banker Customer returns resources to banker Customer eventually pays back loan Banker only lends resources if the system will be in a safe state after the loan Safe state - there is a lending sequence such that all customers can take out a loan Unsafe state - there is a possibility of deadlock 24
25 Safe State and Unsafe State Safe State there is some scheduling order in which every process can run to completion even if all of them suddenly request their maximum number of resources immediately From a safe state, the system can guarantee that all processes will finish Unsafe state: no such guarantee Not a deadlock state Some process may be able to complete 25
26 Is Allocation (1 0 2) to P1 Safe? Process Alloc Max Need Available A B C A B C A B C A B C P P P P P If P1 requests max resources, can complete 26
27 Run Safety Test Process Alloc Max Need Available A B C A B C A B C A B C P P P P P If P1 requests max resources, can complete 27
28 Allocate to P1, Then Process Alloc Max Need Available A B C A B C A B C A B C P P P P P
29 Release: P1 Finishes Process Alloc Max Need Available A B C A B C A B C A B C P P P P P Now P3 can acquire max resources and release 29
30 Release - P3 Finishes Process Alloc Max Need Available A B C A B C A B C A B C P P P P P Now P4 can acquire max resources and release 30
31 Release - P4 Finishes Process Alloc Max Need Available A B C A B C A B C A B C P P P P P Now P2 can acquire max resources and release 31
32 Release - P2 Finishes Process Alloc Max Need Available A B C A B C A B C A B C P P P P P Now P0 can acquire max resources and release 32
33 So P1 Allocation (1 0 2) Is Safe Process Alloc Max Need Available A B C A B C A B C A B C P P P P P
34 Is allocation (0 2 0) to P0 Safe? Process Alloc Max Need Available A B C A B C A B C A B C P P P P P Try to allocate 2 B to P0 34
35 Run Safety Test Process Alloc Max Need Available A B C A B C A B C A B C P P P P P No process can get max resources and release them 35
36 So Unsafe State Do Not Enter Process Alloc Max Need Available A B C A B C A B C A B C P P P P P Return to safe state and do not allocate resource 36
37 P0 Suspended Pending Request Process Alloc Max Need Available A B C A B C A B C A B C P P P P P When enough resources become available, P0 can awaken 37
38 Results P0 s request for 2 Bs cannot be granted because that would prevent any other process from completing if they need their maximum claim 38
39 How to Compute Safety? Given: n kinds of resources p processes Set P of processes struct {resource needs[n], owns[n]} ToDo[p] resource_available[n]... while there exists p in P such that for all i (ToDo[p].needs[i] < available[i]) { for all i { available[i] += ToDo[p].owns[i]; P = P {p}; } } If (P is empty) then system is safe; 39
40 Just Because It s Unsafe P0 could have been allocated 2 Bs and a deadlock might not have occurred if: P1 didn t use its maximum resources but finished using the resources it had 40
41 If P1 Doesn t Need Max Process Alloc Max Need Available A B C A B C A B C A B C P P P2 0 0 P3 1 1 P4 0 2 Then P0 would have finished 41
42 Tradeoff What is the tradeoff? The banker s algorithm is conservative it reduces parallelism for safety s sake 42
43 Banker Solution Issues Process needs to indicate its resource needs in the beginning Process may not terminate Process may request more than claimed A process may suffer infinite postponement (starvation problem) 43
44 Deadlock Detection Check to see if a deadlock has occurred! Single resource per type Can use wait-for graph Check for cycles How? How about multiple resources per type? 44
45 Wait-For Graphs Resource allocation graph Corresponding wait-for graph 45
46 Detection: Multiple Resources per Type Run variant of banker s algorithm to see if processes can finish Time: O(mn 2 ), m: # resources, n: # processes Optimizations? Optimistic version check only that at least one process can finish The deadlock detection is delayed How often should the detection algorithm be run? 46
47 Options: Recovery From Deadlock Kill deadlocked processes and release resources Kill one deadlocked process at a time and release its resources Rollback all or one of the processes to a checkpoint that occurred before they requested any resources Note: may have starvation problems 47
48 Deadlock Summary In general, deadlock detection or avoidance is expensive Must evaluate cost of deadlock against detection or avoidance costs Deadlock avoidance and recovery may cause starvation problems UNIX and Windows use Ostrich Algorithm 48
CSC501 Operating Systems Principles. Deadlock
 CSC501 Operating Systems Principles Deadlock 1 Last Lecture q Priority Inversion Q Priority Inheritance Protocol q Today Q Deadlock 2 The Deadlock Problem q Definition Q A set of blocked processes each
CSC501 Operating Systems Principles Deadlock 1 Last Lecture q Priority Inversion Q Priority Inheritance Protocol q Today Q Deadlock 2 The Deadlock Problem q Definition Q A set of blocked processes each
CS 453 Operating Systems. Lecture 7 : Deadlock
 CS 453 Operating Systems Lecture 7 : Deadlock 1 What is Deadlock? Every New Yorker knows what a gridlock alert is - it s one of those days when there is so much traffic that nobody can move. Everything
CS 453 Operating Systems Lecture 7 : Deadlock 1 What is Deadlock? Every New Yorker knows what a gridlock alert is - it s one of those days when there is so much traffic that nobody can move. Everything
Last class: Today: Synchronization. Deadlocks
 Last class: Synchronization Today: Deadlocks Definition A set of processes is deadlocked if each process in the set is waiting for an event that only another process in the set can cause. An event could
Last class: Synchronization Today: Deadlocks Definition A set of processes is deadlocked if each process in the set is waiting for an event that only another process in the set can cause. An event could
Deadlock (2) Dave Eckhardt Brian Railing Roger Dannenberg
 Dave Eckhardt Brian Railing Roger Dannenberg") Deadlock () Dave Eckhardt Brian Railing Roger Dannenberg 1 1-410, S'18 Synchronization P You should really have, today: Drawn pictures of thread stacks (even if not perfect) Figured out where stubs belong,
Deadlock () Dave Eckhardt Brian Railing Roger Dannenberg 1 1-410, S'18 Synchronization P You should really have, today: Drawn pictures of thread stacks (even if not perfect) Figured out where stubs belong,
Deadlock Ezio Bartocci Institute for Computer Engineering
 TECHNISCHE UNIVERSITÄT WIEN Fakultät für Informatik Cyber-Physical Systems Group Deadlock Ezio Bartocci Institute for Computer Engineering ezio.bartocci@tuwien.ac.at Deadlock Permanent blocking of a set
TECHNISCHE UNIVERSITÄT WIEN Fakultät für Informatik Cyber-Physical Systems Group Deadlock Ezio Bartocci Institute for Computer Engineering ezio.bartocci@tuwien.ac.at Deadlock Permanent blocking of a set
CS162 Operating Systems and Systems Programming Lecture 7 Semaphores, Conditional Variables, Deadlocks"
 CS162 Operating Systems and Systems Programming Lecture 7 Semaphores, Conditional Variables, Deadlocks" September 19, 2012! Ion Stoica! http://inst.eecs.berkeley.edu/~cs162! Recap: Monitors" Monitors represent
CS162 Operating Systems and Systems Programming Lecture 7 Semaphores, Conditional Variables, Deadlocks" September 19, 2012! Ion Stoica! http://inst.eecs.berkeley.edu/~cs162! Recap: Monitors" Monitors represent
Operating Systems. VII. Synchronization
 Operating Systems VII. Synchronization Ludovic Apvrille ludovic.apvrille@telecom-paristech.fr Eurecom, office 470 http://soc.eurecom.fr/os/ @OS Eurecom Outline Synchronization issues 2/22 Fall 2017 Institut
Operating Systems VII. Synchronization Ludovic Apvrille ludovic.apvrille@telecom-paristech.fr Eurecom, office 470 http://soc.eurecom.fr/os/ @OS Eurecom Outline Synchronization issues 2/22 Fall 2017 Institut
Improper Nesting Example
 Improper Nesting Example One of the limits on the use of parbegin/parend, and any related constructs, is that the program involved must be properly nested. Not all programs are. For example, consider the
Improper Nesting Example One of the limits on the use of parbegin/parend, and any related constructs, is that the program involved must be properly nested. Not all programs are. For example, consider the
Clojure Concurrency Constructs, Part Two. CSCI 5828: Foundations of Software Engineering Lecture 13 10/07/2014
 Clojure Concurrency Constructs, Part Two CSCI 5828: Foundations of Software Engineering Lecture 13 10/07/2014 1 Goals Cover the material presented in Chapter 4, of our concurrency textbook In particular,
Clojure Concurrency Constructs, Part Two CSCI 5828: Foundations of Software Engineering Lecture 13 10/07/2014 1 Goals Cover the material presented in Chapter 4, of our concurrency textbook In particular,
CSE 380 Computer Operating Systems
 CSE 380 Computer Operating Systems Instructor: Insup Lee & Dianna Xu University of Pennsylvania, Fall 2003 Lecture Note 3: CPU Scheduling 1 CPU SCHEDULING q How can OS schedule the allocation of CPU cycles
CSE 380 Computer Operating Systems Instructor: Insup Lee & Dianna Xu University of Pennsylvania, Fall 2003 Lecture Note 3: CPU Scheduling 1 CPU SCHEDULING q How can OS schedule the allocation of CPU cycles
CIS 4930/6930: Principles of Cyber-Physical Systems
 CIS 4930/6930: Principles of Cyber-Physical Systems Chapter 11 Scheduling Hao Zheng Department of Computer Science and Engineering University of South Florida H. Zheng (CSE USF) CIS 4930/6930: Principles
CIS 4930/6930: Principles of Cyber-Physical Systems Chapter 11 Scheduling Hao Zheng Department of Computer Science and Engineering University of South Florida H. Zheng (CSE USF) CIS 4930/6930: Principles
Lecture 4: Process Management
 Lecture 4: Process Management Process Revisited 1. What do we know so far about Linux on X-86? X-86 architecture supports both segmentation and paging. 48-bit logical address goes through the segmentation
Lecture 4: Process Management Process Revisited 1. What do we know so far about Linux on X-86? X-86 architecture supports both segmentation and paging. 48-bit logical address goes through the segmentation
Lab Course: distributed data analytics
 Lab Course: distributed data analytics 01. Threading and Parallelism Nghia Duong-Trung, Mohsan Jameel Information Systems and Machine Learning Lab (ISMLL) University of Hildesheim, Germany International
Lab Course: distributed data analytics 01. Threading and Parallelism Nghia Duong-Trung, Mohsan Jameel Information Systems and Machine Learning Lab (ISMLL) University of Hildesheim, Germany International
INF 4140: Models of Concurrency Series 3
 Universitetet i Oslo Institutt for Informatikk PMA Olaf Owe, Martin Steffen, Toktam Ramezani INF 4140: Models of Concurrency Høst 2016 Series 3 14. 9. 2016 Topic: Semaphores (Exercises with hints for solution)
Universitetet i Oslo Institutt for Informatikk PMA Olaf Owe, Martin Steffen, Toktam Ramezani INF 4140: Models of Concurrency Høst 2016 Series 3 14. 9. 2016 Topic: Semaphores (Exercises with hints for solution)
Safety and Liveness. Thread Synchronization: Too Much Milk. Critical Sections. A Really Cool Theorem
 Safety and Liveness Properties defined over an execution of a program Thread Synchronization: Too Much Milk Safety: nothing bad happens holds in every finite execution prefix Windows never crashes No patient
Safety and Liveness Properties defined over an execution of a program Thread Synchronization: Too Much Milk Safety: nothing bad happens holds in every finite execution prefix Windows never crashes No patient
1 st Semester 2007/2008
 Chapter 17: System Departamento de Engenharia Informática Instituto Superior Técnico 1 st Semester 2007/2008 Slides baseados nos slides oficiais do livro Database System c Silberschatz, Korth and Sudarshan.
Chapter 17: System Departamento de Engenharia Informática Instituto Superior Técnico 1 st Semester 2007/2008 Slides baseados nos slides oficiais do livro Database System c Silberschatz, Korth and Sudarshan.
Exercises Solutions. Automation IEA, LTH. Chapter 2 Manufacturing and process systems. Chapter 5 Discrete manufacturing problems
 Exercises Solutions Note, that we have not formulated the answers for all the review questions. You will find the answers for many questions by reading and reflecting about the text in the book. Chapter
Exercises Solutions Note, that we have not formulated the answers for all the review questions. You will find the answers for many questions by reading and reflecting about the text in the book. Chapter
Real Time Operating Systems
 Real Time Operating ystems hared Resources Luca Abeni Credits: Luigi Palopoli, Giuseppe Lipari, and Marco Di Natale cuola uperiore ant Anna Pisa -Italy Real Time Operating ystems p. 1 Interacting Tasks
Real Time Operating ystems hared Resources Luca Abeni Credits: Luigi Palopoli, Giuseppe Lipari, and Marco Di Natale cuola uperiore ant Anna Pisa -Italy Real Time Operating ystems p. 1 Interacting Tasks
Shared resources. Sistemi in tempo reale. Giuseppe Lipari. Scuola Superiore Sant Anna Pisa -Italy
 istemi in tempo reale hared resources Giuseppe Lipari cuola uperiore ant Anna Pisa -Italy inher.tex istemi in tempo reale Giuseppe Lipari 7/6/2005 12:35 p. 1/21 Interacting tasks Until now, we have considered
istemi in tempo reale hared resources Giuseppe Lipari cuola uperiore ant Anna Pisa -Italy inher.tex istemi in tempo reale Giuseppe Lipari 7/6/2005 12:35 p. 1/21 Interacting tasks Until now, we have considered
Barrier. Overview: Synchronous Computations. Barriers. Counter-based or Linear Barriers
 Overview: Synchronous Computations Barrier barriers: linear, tree-based and butterfly degrees of synchronization synchronous example : Jacobi Iterations serial and parallel code, performance analysis synchronous
Overview: Synchronous Computations Barrier barriers: linear, tree-based and butterfly degrees of synchronization synchronous example : Jacobi Iterations serial and parallel code, performance analysis synchronous
Real Time Operating Systems
 Real Time Operating ystems Luca Abeni luca.abeni@unitn.it Interacting Tasks Until now, only independent tasks... A job never blocks or suspends A task only blocks on job termination In real world, jobs
Real Time Operating ystems Luca Abeni luca.abeni@unitn.it Interacting Tasks Until now, only independent tasks... A job never blocks or suspends A task only blocks on job termination In real world, jobs
Simulation of Process Scheduling Algorithms
 Simulation of Process Scheduling Algorithms Project Report Instructor: Dr. Raimund Ege Submitted by: Sonal Sood Pramod Barthwal Index 1. Introduction 2. Proposal 3. Background 3.1 What is a Process 4.
Simulation of Process Scheduling Algorithms Project Report Instructor: Dr. Raimund Ege Submitted by: Sonal Sood Pramod Barthwal Index 1. Introduction 2. Proposal 3. Background 3.1 What is a Process 4.
CPU scheduling. CPU Scheduling
 EECS 3221 Operating System Fundamentals No.4 CPU scheduling Prof. Hui Jiang Dept of Electrical Engineering and Computer Science, York University CPU Scheduling CPU scheduling is the basis of multiprogramming
EECS 3221 Operating System Fundamentals No.4 CPU scheduling Prof. Hui Jiang Dept of Electrical Engineering and Computer Science, York University CPU Scheduling CPU scheduling is the basis of multiprogramming
Modal and Temporal Logics
 Modal and Temporal Logics Colin Stirling School of Informatics University of Edinburgh July 23, 2003 Why modal and temporal logics? 1 Computational System Modal and temporal logics Operational semantics
Modal and Temporal Logics Colin Stirling School of Informatics University of Edinburgh July 23, 2003 Why modal and temporal logics? 1 Computational System Modal and temporal logics Operational semantics
Lesson 3: Using Linear Combinations to Solve a System of Equations
 Lesson 3: Using Linear Combinations to Solve a System of Equations Steps for Using Linear Combinations to Solve a System of Equations 1. 2. 3. 4. 5. Example 1 Solve the following system using the linear
Lesson 3: Using Linear Combinations to Solve a System of Equations Steps for Using Linear Combinations to Solve a System of Equations 1. 2. 3. 4. 5. Example 1 Solve the following system using the linear
Distributed Systems Principles and Paradigms. Chapter 06: Synchronization
 Distributed Systems Principles and Paradigms Maarten van Steen VU Amsterdam, Dept. Computer Science Room R4.20, steen@cs.vu.nl Chapter 06: Synchronization Version: November 16, 2009 2 / 39 Contents Chapter
Distributed Systems Principles and Paradigms Maarten van Steen VU Amsterdam, Dept. Computer Science Room R4.20, steen@cs.vu.nl Chapter 06: Synchronization Version: November 16, 2009 2 / 39 Contents Chapter
Distributed Systems Principles and Paradigms
 Distributed Systems Principles and Paradigms Chapter 6 (version April 7, 28) Maarten van Steen Vrije Universiteit Amsterdam, Faculty of Science Dept. Mathematics and Computer Science Room R4.2. Tel: (2)
Distributed Systems Principles and Paradigms Chapter 6 (version April 7, 28) Maarten van Steen Vrije Universiteit Amsterdam, Faculty of Science Dept. Mathematics and Computer Science Room R4.2. Tel: (2)
Overview: Synchronous Computations
 Overview: Synchronous Computations barriers: linear, tree-based and butterfly degrees of synchronization synchronous example 1: Jacobi Iterations serial and parallel code, performance analysis synchronous
Overview: Synchronous Computations barriers: linear, tree-based and butterfly degrees of synchronization synchronous example 1: Jacobi Iterations serial and parallel code, performance analysis synchronous
Correctness of Concurrent Programs
 Correctness of Concurrent Programs Trifon Ruskov ruskov@tu-varna.acad.bg Technical University of Varna - Bulgaria Correctness of Concurrent Programs Correctness of concurrent programs needs to be formalized:
Correctness of Concurrent Programs Trifon Ruskov ruskov@tu-varna.acad.bg Technical University of Varna - Bulgaria Correctness of Concurrent Programs Correctness of concurrent programs needs to be formalized:
TDDB68 Concurrent programming and operating systems. Lecture: CPU Scheduling II
 TDDB68 Concurrent programming and operating systems Lecture: CPU Scheduling II Mikael Asplund, Senior Lecturer Real-time Systems Laboratory Department of Computer and Information Science Copyright Notice:
TDDB68 Concurrent programming and operating systems Lecture: CPU Scheduling II Mikael Asplund, Senior Lecturer Real-time Systems Laboratory Department of Computer and Information Science Copyright Notice:
Causality & Concurrency. Time-Stamping Systems. Plausibility. Example TSS: Lamport Clocks. Example TSS: Vector Clocks
 Plausible Clocks with Bounded Inaccuracy Causality & Concurrency a b exists a path from a to b Brad Moore, Paul Sivilotti Computer Science & Engineering The Ohio State University paolo@cse.ohio-state.edu
Plausible Clocks with Bounded Inaccuracy Causality & Concurrency a b exists a path from a to b Brad Moore, Paul Sivilotti Computer Science & Engineering The Ohio State University paolo@cse.ohio-state.edu
CPU Scheduling. Heechul Yun
 CPU Scheduling Heechul Yun 1 Recap Four deadlock conditions: Mutual exclusion No preemption Hold and wait Circular wait Detection Avoidance Banker s algorithm 2 Recap: Banker s Algorithm 1. Initialize
CPU Scheduling Heechul Yun 1 Recap Four deadlock conditions: Mutual exclusion No preemption Hold and wait Circular wait Detection Avoidance Banker s algorithm 2 Recap: Banker s Algorithm 1. Initialize
The Weakest Failure Detector to Solve Mutual Exclusion
 The Weakest Failure Detector to Solve Mutual Exclusion Vibhor Bhatt Nicholas Christman Prasad Jayanti Dartmouth College, Hanover, NH Dartmouth Computer Science Technical Report TR2008-618 April 17, 2008
The Weakest Failure Detector to Solve Mutual Exclusion Vibhor Bhatt Nicholas Christman Prasad Jayanti Dartmouth College, Hanover, NH Dartmouth Computer Science Technical Report TR2008-618 April 17, 2008
INF Models of concurrency
 Monitors INF4140 - Models of concurrency Monitors, lecture 4 Fall 2017 27. September 2017 2 / 49 Overview Concurrent execution of different processes Communication by shared variables Processes may interfere
Monitors INF4140 - Models of concurrency Monitors, lecture 4 Fall 2017 27. September 2017 2 / 49 Overview Concurrent execution of different processes Communication by shared variables Processes may interfere
Che-Wei Chang Department of Computer Science and Information Engineering, Chang Gung University
 Che-Wei Chang chewei@mail.cgu.edu.tw Department of Computer Science and Information Engineering, Chang Gung University } 2017/11/15 Midterm } 2017/11/22 Final Project Announcement 2 1. Introduction 2.
Che-Wei Chang chewei@mail.cgu.edu.tw Department of Computer Science and Information Engineering, Chang Gung University } 2017/11/15 Midterm } 2017/11/22 Final Project Announcement 2 1. Introduction 2.
FACTORS AFFECTING CONCURRENT TRUNCATE
 T E C H N I C A L N O T E FACTORS AFFECTING CONCURRENT TRUNCATE DURING BATCH PROCESSES Prepared By David Kurtz, Go-Faster Consultancy Ltd. Technical Note Version 1.00 Thursday 2 April 2009 (E-mail: david.kurtz@go-faster.co.uk,
T E C H N I C A L N O T E FACTORS AFFECTING CONCURRENT TRUNCATE DURING BATCH PROCESSES Prepared By David Kurtz, Go-Faster Consultancy Ltd. Technical Note Version 1.00 Thursday 2 April 2009 (E-mail: david.kurtz@go-faster.co.uk,
CPU SCHEDULING RONG ZHENG
 CPU SCHEDULING RONG ZHENG OVERVIEW Why scheduling? Non-preemptive vs Preemptive policies FCFS, SJF, Round robin, multilevel queues with feedback, guaranteed scheduling 2 SHORT-TERM, MID-TERM, LONG- TERM
CPU SCHEDULING RONG ZHENG OVERVIEW Why scheduling? Non-preemptive vs Preemptive policies FCFS, SJF, Round robin, multilevel queues with feedback, guaranteed scheduling 2 SHORT-TERM, MID-TERM, LONG- TERM
Process Scheduling for RTS. RTS Scheduling Approach. Cyclic Executive Approach
 Process Scheduling for RTS Dr. Hugh Melvin, Dept. of IT, NUI,G RTS Scheduling Approach RTS typically control multiple parameters concurrently Eg. Flight Control System Speed, altitude, inclination etc..
Process Scheduling for RTS Dr. Hugh Melvin, Dept. of IT, NUI,G RTS Scheduling Approach RTS typically control multiple parameters concurrently Eg. Flight Control System Speed, altitude, inclination etc..
Scheduling I. Today Introduction to scheduling Classical algorithms. Next Time Advanced topics on scheduling
 Scheduling I Today Introduction to scheduling Classical algorithms Next Time Advanced topics on scheduling Scheduling out there You are the manager of a supermarket (ok, things don t always turn out the
Scheduling I Today Introduction to scheduling Classical algorithms Next Time Advanced topics on scheduling Scheduling out there You are the manager of a supermarket (ok, things don t always turn out the
Process Scheduling. Process Scheduling. CPU and I/O Bursts. CPU - I/O Burst Cycle. Variations in Bursts. Histogram of CPU Burst Times
 Scheduling The objective of multiprogramming is to have some process running all the time The objective of timesharing is to have the switch between processes so frequently that users can interact with
Scheduling The objective of multiprogramming is to have some process running all the time The objective of timesharing is to have the switch between processes so frequently that users can interact with
Generate i/o load on your vm and use iostat to demonstrate the increased in i/o
 Jae Sook Lee SP17 CSIT 432-01 Dr. Chris Leberknight iostat Generate i/o load on your vm and use iostat to demonstrate the increased in i/o Terminal # 1 iostat -c -d -t 2 100 > JaeSookLee_iostat.txt
Jae Sook Lee SP17 CSIT 432-01 Dr. Chris Leberknight iostat Generate i/o load on your vm and use iostat to demonstrate the increased in i/o Terminal # 1 iostat -c -d -t 2 100 > JaeSookLee_iostat.txt
An Optimal k-exclusion Real-Time Locking Protocol Motivated by Multi-GPU Systems
 An Optimal k-exclusion Real-Time Locking Protocol Motivated by Multi-GPU Systems Glenn A. Elliott and James H. Anderson Department of Computer Science, University of North Carolina at Chapel Hill Abstract
An Optimal k-exclusion Real-Time Locking Protocol Motivated by Multi-GPU Systems Glenn A. Elliott and James H. Anderson Department of Computer Science, University of North Carolina at Chapel Hill Abstract
Scheduling I. Today. Next Time. ! Introduction to scheduling! Classical algorithms. ! Advanced topics on scheduling
 Scheduling I Today! Introduction to scheduling! Classical algorithms Next Time! Advanced topics on scheduling Scheduling out there! You are the manager of a supermarket (ok, things don t always turn out
Scheduling I Today! Introduction to scheduling! Classical algorithms Next Time! Advanced topics on scheduling Scheduling out there! You are the manager of a supermarket (ok, things don t always turn out
6.852: Distributed Algorithms Fall, Class 24
 6.852: Distributed Algorithms Fall, 2009 Class 24 Today s plan Self-stabilization Self-stabilizing algorithms: Breadth-first spanning tree Mutual exclusion Composing self-stabilizing algorithms Making
6.852: Distributed Algorithms Fall, 2009 Class 24 Today s plan Self-stabilization Self-stabilizing algorithms: Breadth-first spanning tree Mutual exclusion Composing self-stabilizing algorithms Making
CMSC 451: Lecture 7 Greedy Algorithms for Scheduling Tuesday, Sep 19, 2017
 CMSC CMSC : Lecture Greedy Algorithms for Scheduling Tuesday, Sep 9, 0 Reading: Sects.. and. of KT. (Not covered in DPV.) Interval Scheduling: We continue our discussion of greedy algorithms with a number
CMSC CMSC : Lecture Greedy Algorithms for Scheduling Tuesday, Sep 9, 0 Reading: Sects.. and. of KT. (Not covered in DPV.) Interval Scheduling: We continue our discussion of greedy algorithms with a number
Sub-Optimal Scheduling of a Flexible Batch Manufacturing System using an Integer Programming Solution
 Sub-Optimal Scheduling of a Flexible Batch Manufacturing System using an Integer Programming Solution W. Weyerman, D. West, S. Warnick Information Dynamics and Intelligent Systems Group Department of Computer
Sub-Optimal Scheduling of a Flexible Batch Manufacturing System using an Integer Programming Solution W. Weyerman, D. West, S. Warnick Information Dynamics and Intelligent Systems Group Department of Computer
Bounded Delay for Weighted Round Robin with Burst Crediting
 Bounded Delay for Weighted Round Robin with Burst Crediting Sponsor: Sprint Kert Mezger David W. Petr Technical Report TISL-0230-08 Telecommunications and Information Sciences Laboratory Department of
Bounded Delay for Weighted Round Robin with Burst Crediting Sponsor: Sprint Kert Mezger David W. Petr Technical Report TISL-0230-08 Telecommunications and Information Sciences Laboratory Department of
Latches. October 13, 2003 Latches 1
 Latches The second part of CS231 focuses on sequential circuits, where we add memory to the hardware that we ve already seen. Our schedule will be very similar to before: We first show how primitive memory
Latches The second part of CS231 focuses on sequential circuits, where we add memory to the hardware that we ve already seen. Our schedule will be very similar to before: We first show how primitive memory
CPU Scheduling. CPU Scheduler
 CPU Scheduling These slides are created by Dr. Huang of George Mason University. Students registered in Dr. Huang s courses at GMU can make a single machine readable copy and print a single copy of each
CPU Scheduling These slides are created by Dr. Huang of George Mason University. Students registered in Dr. Huang s courses at GMU can make a single machine readable copy and print a single copy of each
Introduction to functions
 Introduction to functions Comp Sci 1570 Introduction to C++ Outline 1 2 Functions A function is a reusable sequence of s designed to do a particular job. In C++, a function is a group of s that is given
Introduction to functions Comp Sci 1570 Introduction to C++ Outline 1 2 Functions A function is a reusable sequence of s designed to do a particular job. In C++, a function is a group of s that is given
CS/IT OPERATING SYSTEMS
 CS/IT 5 (CR) Total No. of Questions :09] [Total No. of Pages : 0 II/IV B.Tech. DEGREE EXAMINATIONS, DECEMBER- 06 CS/IT OPERATING SYSTEMS. a) System Boot Answer Question No. Compulsory. Answer One Question
CS/IT 5 (CR) Total No. of Questions :09] [Total No. of Pages : 0 II/IV B.Tech. DEGREE EXAMINATIONS, DECEMBER- 06 CS/IT OPERATING SYSTEMS. a) System Boot Answer Question No. Compulsory. Answer One Question
1 Lamport s Bakery Algorithm
 Com S 6 Spring Semester 2009 Algorithms for Multiprocessor Synchronization Lecture 3: Tuesday, 27th January 2009 Instructor: Soma Chaudhuri Scribe: Neeraj Khanolkar Lamport s Bakery Algorithm Algorithm
Com S 6 Spring Semester 2009 Algorithms for Multiprocessor Synchronization Lecture 3: Tuesday, 27th January 2009 Instructor: Soma Chaudhuri Scribe: Neeraj Khanolkar Lamport s Bakery Algorithm Algorithm
Chapter 6: CPU Scheduling
 Chapter 6: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling Real-Time Scheduling Algorithm Evaluation 6.1 Basic Concepts Maximum CPU utilization obtained
Chapter 6: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling Real-Time Scheduling Algorithm Evaluation 6.1 Basic Concepts Maximum CPU utilization obtained
Lecture Note #6: More on Task Scheduling EECS 571 Principles of Real-Time Embedded Systems Kang G. Shin EECS Department University of Michigan
 Lecture Note #6: More on Task Scheduling EECS 571 Principles of Real-Time Embedded Systems Kang G. Shin EECS Department University of Michigan Note 6-1 Mars Pathfinder Timing Hiccups? When: landed on the
Lecture Note #6: More on Task Scheduling EECS 571 Principles of Real-Time Embedded Systems Kang G. Shin EECS Department University of Michigan Note 6-1 Mars Pathfinder Timing Hiccups? When: landed on the
Non-Work-Conserving Non-Preemptive Scheduling: Motivations, Challenges, and Potential Solutions
 Non-Work-Conserving Non-Preemptive Scheduling: Motivations, Challenges, and Potential Solutions Mitra Nasri Chair of Real-time Systems, Technische Universität Kaiserslautern, Germany nasri@eit.uni-kl.de
Non-Work-Conserving Non-Preemptive Scheduling: Motivations, Challenges, and Potential Solutions Mitra Nasri Chair of Real-time Systems, Technische Universität Kaiserslautern, Germany nasri@eit.uni-kl.de
CSE 105 Theory of Computation
 CSE 105 Theory of Computation http://www.jflap.org/jflaptmp/ Professor Jeanne Ferrante 1 Today s Agenda Quick Review of CFG s and PDA s Introduction to Turing Machines and their Languages Reminders and
CSE 105 Theory of Computation http://www.jflap.org/jflaptmp/ Professor Jeanne Ferrante 1 Today s Agenda Quick Review of CFG s and PDA s Introduction to Turing Machines and their Languages Reminders and
Methods for the specification and verification of business processes MPB (6 cfu, 295AA)
") Methods for the specification and verification of business processes MPB (6 cfu, 295AA) Roberto Bruni http://www.di.unipi.it/~bruni 08 - Petri nets basics 1 Object Formalization of the basic concepts of
Methods for the specification and verification of business processes MPB (6 cfu, 295AA) Roberto Bruni http://www.di.unipi.it/~bruni 08 - Petri nets basics 1 Object Formalization of the basic concepts of
Embedded Systems 14. Overview of embedded systems design
 Embedded Systems 14-1 - Overview of embedded systems design - 2-1 Point of departure: Scheduling general IT systems In general IT systems, not much is known about the computational processes a priori The
Embedded Systems 14-1 - Overview of embedded systems design - 2-1 Point of departure: Scheduling general IT systems In general IT systems, not much is known about the computational processes a priori The
CptS 464/564 Fall Prof. Dave Bakken. Cpt. S 464/564 Lecture January 26, 2014
 Overview of Ordering and Logical Time Prof. Dave Bakken Cpt. S 464/564 Lecture January 26, 2014 Context This material is NOT in CDKB5 textbook Rather, from second text by Verissimo and Rodrigues, chapters
Overview of Ordering and Logical Time Prof. Dave Bakken Cpt. S 464/564 Lecture January 26, 2014 Context This material is NOT in CDKB5 textbook Rather, from second text by Verissimo and Rodrigues, chapters
Real-time operating systems course. 6 Definitions Non real-time scheduling algorithms Real-time scheduling algorithm
 Real-time operating systems course 6 Definitions Non real-time scheduling algorithms Real-time scheduling algorithm Definitions Scheduling Scheduling is the activity of selecting which process/thread should
Real-time operating systems course 6 Definitions Non real-time scheduling algorithms Real-time scheduling algorithm Definitions Scheduling Scheduling is the activity of selecting which process/thread should
Impossibility of Distributed Consensus with One Faulty Process
 Impossibility of Distributed Consensus with One Faulty Process Journal of the ACM 32(2):374-382, April 1985. MJ Fischer, NA Lynch, MS Peterson. Won the 2002 Dijkstra Award (for influential paper in distributed
Impossibility of Distributed Consensus with One Faulty Process Journal of the ACM 32(2):374-382, April 1985. MJ Fischer, NA Lynch, MS Peterson. Won the 2002 Dijkstra Award (for influential paper in distributed
Allocate-On-Use Space Complexity of Shared-Memory Algorithms
 Allocate-On-Use Space Complexity of Shared-Memory Algorithms James Aspnes Bernhard Haeupler Alexander Tong Philipp Woelfel DISC 2018 Asynchronous shared memory model Processes: p 1 p 2 p 3 p n Objects:
Allocate-On-Use Space Complexity of Shared-Memory Algorithms James Aspnes Bernhard Haeupler Alexander Tong Philipp Woelfel DISC 2018 Asynchronous shared memory model Processes: p 1 p 2 p 3 p n Objects:
Today s Agenda: 1) Why Do We Need To Measure The Memory Component? 2) Machine Pool Memory / Best Practice Guidelines
 Why Do We Need To Measure The Memory Component? 2) Machine Pool Memory / Best Practice Guidelines") Today s Agenda: 1) Why Do We Need To Measure The Memory Component? 2) Machine Pool Memory / Best Practice Guidelines 3) Techniques To Measure The Memory Component a) Understanding Your Current Environment
Today s Agenda: 1) Why Do We Need To Measure The Memory Component? 2) Machine Pool Memory / Best Practice Guidelines 3) Techniques To Measure The Memory Component a) Understanding Your Current Environment
Lecture 9: Cri,cal Sec,ons revisited, and Reasoning about Programs. K. V. S. Prasad Dept of Computer Science Chalmers University Monday 23 Feb 2015
 Lecture 9: Cri,cal Sec,ons revisited, and Reasoning about Programs K. V. S. Prasad Dept of Computer Science Chalmers University Monday 23 Feb 2015 Plan for today Chap 2, 3 recap and complete Chap 4 intro
Lecture 9: Cri,cal Sec,ons revisited, and Reasoning about Programs K. V. S. Prasad Dept of Computer Science Chalmers University Monday 23 Feb 2015 Plan for today Chap 2, 3 recap and complete Chap 4 intro
CS 152 Computer Architecture and Engineering. Lecture 17: Synchronization and Sequential Consistency
 CS 152 Computer Architecture and Engineering Lecture 17: Synchronization and Sequential Consistency Dr. George Michelogiannakis EECS, University of California at Berkeley CRD, Lawrence Berkeley National
CS 152 Computer Architecture and Engineering Lecture 17: Synchronization and Sequential Consistency Dr. George Michelogiannakis EECS, University of California at Berkeley CRD, Lawrence Berkeley National
Exploring an Unknown Graph to Locate a Black Hole Using Tokens
 Exploring an Unknown Graph to Locate a Black Hole Using Tokens Stefan Dobrev 1, Paola Flocchini 1, Rastislav Královič 1,2, and Nicola Santoro 3 1 SITE, University of Ottawa, {sdobrev,flocchin}@site.uottawa.ca
Exploring an Unknown Graph to Locate a Black Hole Using Tokens Stefan Dobrev 1, Paola Flocchini 1, Rastislav Královič 1,2, and Nicola Santoro 3 1 SITE, University of Ottawa, {sdobrev,flocchin}@site.uottawa.ca
Solutions to the second midterm. COSC 4330/6310 Summer 2013
 Solutions to the second midterm COSC 4330/6310 Summer 2013 First question Consider the following set of parameters for a System V Release 4 scheduler: #ts_quantum ts_tqexp ts_slpret ts_maxwait ts_lwait
Solutions to the second midterm COSC 4330/6310 Summer 2013 First question Consider the following set of parameters for a System V Release 4 scheduler: #ts_quantum ts_tqexp ts_slpret ts_maxwait ts_lwait
Module 5: CPU Scheduling
 Module 5: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling Real-Time Scheduling Algorithm Evaluation 5.1 Basic Concepts Maximum CPU utilization obtained
Module 5: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling Real-Time Scheduling Algorithm Evaluation 5.1 Basic Concepts Maximum CPU utilization obtained
Decentralized Control of Discrete Event Systems with Bounded or Unbounded Delay Communication
 Decentralized Control of Discrete Event Systems with Bounded or Unbounded Delay Communication Stavros Tripakis Abstract We introduce problems of decentralized control with communication, where we explicitly
Decentralized Control of Discrete Event Systems with Bounded or Unbounded Delay Communication Stavros Tripakis Abstract We introduce problems of decentralized control with communication, where we explicitly
Introduction to Model Checking. Debdeep Mukhopadhyay IIT Madras
 Introduction to Model Checking Debdeep Mukhopadhyay IIT Madras How good can you fight bugs? Comprising of three parts Formal Verification techniques consist of three parts: 1. A framework for modeling
Introduction to Model Checking Debdeep Mukhopadhyay IIT Madras How good can you fight bugs? Comprising of three parts Formal Verification techniques consist of three parts: 1. A framework for modeling
Distributed Algorithms (CAS 769) Dr. Borzoo Bonakdarpour
 Dr. Borzoo Bonakdarpour") Distributed Algorithms (CAS 769) Week 1: Introduction, Logical clocks, Snapshots Dr. Borzoo Bonakdarpour Department of Computing and Software McMaster University Dr. Borzoo Bonakdarpour Distributed Algorithms
Distributed Algorithms (CAS 769) Week 1: Introduction, Logical clocks, Snapshots Dr. Borzoo Bonakdarpour Department of Computing and Software McMaster University Dr. Borzoo Bonakdarpour Distributed Algorithms
Safety and Liveness Properties
 Safety and Liveness Properties Lecture #6 of Model Checking Joost-Pieter Katoen Lehrstuhl 2: Software Modeling and Verification E-mail: katoen@cs.rwth-aachen.de November 5, 2008 c JPK Overview Lecture
Safety and Liveness Properties Lecture #6 of Model Checking Joost-Pieter Katoen Lehrstuhl 2: Software Modeling and Verification E-mail: katoen@cs.rwth-aachen.de November 5, 2008 c JPK Overview Lecture
Coordination. Failures and Consensus. Consensus. Consensus. Overview. Properties for Correct Consensus. Variant I: Consensus (C) P 1. v 1.
 P 1. v 1.") Coordination Failures and Consensus If the solution to availability and scalability is to decentralize and replicate functions and data, how do we coordinate the nodes? data consistency update propagation
Coordination Failures and Consensus If the solution to availability and scalability is to decentralize and replicate functions and data, how do we coordinate the nodes? data consistency update propagation
Abstractions and Decision Procedures for Effective Software Model Checking
 Abstractions and Decision Procedures for Effective Software Model Checking Prof. Natasha Sharygina The University of Lugano, Carnegie Mellon University Microsoft Summer School, Moscow, July 2011 Lecture
Abstractions and Decision Procedures for Effective Software Model Checking Prof. Natasha Sharygina The University of Lugano, Carnegie Mellon University Microsoft Summer School, Moscow, July 2011 Lecture
CHAPTER 5 - PROCESS SCHEDULING
 CHAPTER 5 - PROCESS SCHEDULING OBJECTIVES To introduce CPU scheduling, which is the basis for multiprogrammed operating systems To describe various CPU-scheduling algorithms To discuss evaluation criteria
CHAPTER 5 - PROCESS SCHEDULING OBJECTIVES To introduce CPU scheduling, which is the basis for multiprogrammed operating systems To describe various CPU-scheduling algorithms To discuss evaluation criteria
Comp 204: Computer Systems and Their Implementation. Lecture 11: Scheduling cont d
 Comp 204: Computer Systems and Their Implementation Lecture 11: Scheduling cont d 1 Today Scheduling algorithms continued Shortest remaining time first (SRTF) Priority scheduling Round robin (RR) Multilevel
Comp 204: Computer Systems and Their Implementation Lecture 11: Scheduling cont d 1 Today Scheduling algorithms continued Shortest remaining time first (SRTF) Priority scheduling Round robin (RR) Multilevel
Lock using Bakery Algorithm
 Lock using Bakery Algorithm Shankar April 16, 2014 Overview Classical mutual exclusion problem given program with critical sections and threads 0..N 1 obtain entry and exit code for each critical section
Lock using Bakery Algorithm Shankar April 16, 2014 Overview Classical mutual exclusion problem given program with critical sections and threads 0..N 1 obtain entry and exit code for each critical section
Agreement. Today. l Coordination and agreement in group communication. l Consensus
 Agreement Today l Coordination and agreement in group communication l Consensus Events and process states " A distributed system a collection P of N singlethreaded processes w/o shared memory Each process
Agreement Today l Coordination and agreement in group communication l Consensus Events and process states " A distributed system a collection P of N singlethreaded processes w/o shared memory Each process
More Turing Machines. CS154 Chris Pollett Mar 15, 2006.
 More Turing Machines CS154 Chris Pollett Mar 15, 2006. Outline Multitape Turing Machines Nondeterministic Turing Machines Enumerators Introduction There have been many different proposals for what it means
More Turing Machines CS154 Chris Pollett Mar 15, 2006. Outline Multitape Turing Machines Nondeterministic Turing Machines Enumerators Introduction There have been many different proposals for what it means
1 Introduction (January 21)
") CS 97: Concrete Models of Computation Spring Introduction (January ). Deterministic Complexity Consider a monotonically nondecreasing function f : {,,..., n} {, }, where f() = and f(n) =. We call f a step
CS 97: Concrete Models of Computation Spring Introduction (January ). Deterministic Complexity Consider a monotonically nondecreasing function f : {,,..., n} {, }, where f() = and f(n) =. We call f a step
Announcements. Project #1 grades were returned on Monday. Midterm #1. Project #2. Requests for re-grades due by Tuesday
 Announcements Project #1 grades were returned on Monday Requests for re-grades due by Tuesday Midterm #1 Re-grade requests due by Monday Project #2 Due 10 AM Monday 1 Page State (hardware view) Page frame
Announcements Project #1 grades were returned on Monday Requests for re-grades due by Tuesday Midterm #1 Re-grade requests due by Monday Project #2 Due 10 AM Monday 1 Page State (hardware view) Page frame
UC Santa Barbara. Operating Systems. Christopher Kruegel Department of Computer Science UC Santa Barbara
 Operating Systems Christopher Kruegel Department of Computer Science http://www.cs.ucsb.edu/~chris/ Many processes to execute, but one CPU OS time-multiplexes the CPU by operating context switching Between
Operating Systems Christopher Kruegel Department of Computer Science http://www.cs.ucsb.edu/~chris/ Many processes to execute, but one CPU OS time-multiplexes the CPU by operating context switching Between
LSN 15 Processor Scheduling
 LSN 15 Processor Scheduling ECT362 Operating Systems Department of Engineering Technology LSN 15 Processor Scheduling LSN 15 FCFS/FIFO Scheduling Each process joins the Ready queue When the current process
LSN 15 Processor Scheduling ECT362 Operating Systems Department of Engineering Technology LSN 15 Processor Scheduling LSN 15 FCFS/FIFO Scheduling Each process joins the Ready queue When the current process
DRAFT - do not circulate
 An Introduction to Proofs about Concurrent Programs K. V. S. Prasad (for the course TDA383/DIT390) Deartment of Comuter Science Chalmers University Setember 26, 2016 Rough sketch of notes released since
An Introduction to Proofs about Concurrent Programs K. V. S. Prasad (for the course TDA383/DIT390) Deartment of Comuter Science Chalmers University Setember 26, 2016 Rough sketch of notes released since
CEC 450 Real-Time Systems
 CEC 450 Real-Time Systems Lecture 3 Real-Time Services Part 2 (Rate Monotonic Theory - Policy and Feasibility for RT Services) September 7, 2018 Sam Siewert Quick Review Service Utility RM Policy, Feasibility,
CEC 450 Real-Time Systems Lecture 3 Real-Time Services Part 2 (Rate Monotonic Theory - Policy and Feasibility for RT Services) September 7, 2018 Sam Siewert Quick Review Service Utility RM Policy, Feasibility,
A subtle problem. An obvious problem. An obvious problem. An obvious problem. No!
 A subtle problem An obvious problem when LC = t do S doesn t make sense for Lamport clocks! there is no guarantee that LC will ever be S is anyway executed after LC = t Fixes: if e is internal/send and
A subtle problem An obvious problem when LC = t do S doesn t make sense for Lamport clocks! there is no guarantee that LC will ever be S is anyway executed after LC = t Fixes: if e is internal/send and
Lecture 3: Decidability
 Lecture 3: Decidability January 11, 2011 Lecture 3, Slide 1 ECS 235B, Foundations of Information and Computer Security January 11, 2011 1 Review 2 Decidability of security Mono-operational command case
Lecture 3: Decidability January 11, 2011 Lecture 3, Slide 1 ECS 235B, Foundations of Information and Computer Security January 11, 2011 1 Review 2 Decidability of security Mono-operational command case
CS 550 Operating Systems Spring CPU scheduling I
 1 CS 550 Operating Systems Spring 2018 CPU scheduling I Process Lifecycle Ready Process is ready to execute, but not yet executing Its waiting in the scheduling queue for the CPU scheduler to pick it up.
1 CS 550 Operating Systems Spring 2018 CPU scheduling I Process Lifecycle Ready Process is ready to execute, but not yet executing Its waiting in the scheduling queue for the CPU scheduler to pick it up.
CPU Scheduling Exercises
 CPU Scheduling Exercises NOTE: All time in these exercises are in msec. Processes P 1, P 2, P 3 arrive at the same time, but enter the job queue in the order presented in the table. Time quantum = 3 msec
CPU Scheduling Exercises NOTE: All time in these exercises are in msec. Processes P 1, P 2, P 3 arrive at the same time, but enter the job queue in the order presented in the table. Time quantum = 3 msec
P (E) = P (A 1 )P (A 2 )... P (A n ).
 = P (A 1 )P (A 2 )... P (A n ).") Lecture 9: Conditional probability II: breaking complex events into smaller events, methods to solve probability problems, Bayes rule, law of total probability, Bayes theorem Discrete Structures II (Summer
Lecture 9: Conditional probability II: breaking complex events into smaller events, methods to solve probability problems, Bayes rule, law of total probability, Bayes theorem Discrete Structures II (Summer
The algorithmic analysis of hybrid system
 The algorithmic analysis of hybrid system Authors: R.Alur, C. Courcoubetis etc. Course teacher: Prof. Ugo Buy Xin Li, Huiyong Xiao Nov. 13, 2002 Summary What s a hybrid system? Definition of Hybrid Automaton
The algorithmic analysis of hybrid system Authors: R.Alur, C. Courcoubetis etc. Course teacher: Prof. Ugo Buy Xin Li, Huiyong Xiao Nov. 13, 2002 Summary What s a hybrid system? Definition of Hybrid Automaton
Scheduling Slack Time in Fixed Priority Pre-emptive Systems
 Scheduling Slack Time in Fixed Priority Pre-emptive Systems R.I.Davis Real-Time Systems Research Group, Department of Computer Science, University of York, England. ABSTRACT This report addresses the problem
Scheduling Slack Time in Fixed Priority Pre-emptive Systems R.I.Davis Real-Time Systems Research Group, Department of Computer Science, University of York, England. ABSTRACT This report addresses the problem
Activity selection. Goal: Select the largest possible set of nonoverlapping (mutually compatible) activities.
 activities.") Greedy Algorithm 1 Introduction Similar to dynamic programming. Used for optimization problems. Not always yield an optimal solution. Make choice for the one looks best right now. Make a locally optimal
Greedy Algorithm 1 Introduction Similar to dynamic programming. Used for optimization problems. Not always yield an optimal solution. Make choice for the one looks best right now. Make a locally optimal
Outline. policies for the first part. with some potential answers... MCS 260 Lecture 10.0 Introduction to Computer Science Jan Verschelde, 9 July 2014
 Outline 1 midterm exam on Friday 11 July 2014 policies for the first part 2 questions with some potential answers... MCS 260 Lecture 10.0 Introduction to Computer Science Jan Verschelde, 9 July 2014 Intro
Outline 1 midterm exam on Friday 11 July 2014 policies for the first part 2 questions with some potential answers... MCS 260 Lecture 10.0 Introduction to Computer Science Jan Verschelde, 9 July 2014 Intro
Recognizing Safety and Liveness by Alpern and Schneider
 Recognizing Safety and Liveness by Alpern and Schneider Calvin Deutschbein 17 Jan 2017 1 Intro 1.1 Safety What is safety? Bad things do not happen For example, consider the following safe program in C:
Recognizing Safety and Liveness by Alpern and Schneider Calvin Deutschbein 17 Jan 2017 1 Intro 1.1 Safety What is safety? Bad things do not happen For example, consider the following safe program in C:
TDDI04, K. Arvidsson, IDA, Linköpings universitet CPU Scheduling. Overview: CPU Scheduling. [SGG7] Chapter 5. Basic Concepts.
![TDDI04, K. Arvidsson, IDA, Linköpings universitet CPU Scheduling. Overview: CPU Scheduling. [SGG7] Chapter 5. Basic Concepts.](/thumbs/79/80204297.jpg "TDDI04, K. Arvidsson, IDA, Linköpings universitet CPU Scheduling. Overview: CPU Scheduling. [SGG7] Chapter 5. Basic Concepts.") TDDI4 Concurrent Programming, Operating Systems, and Real-time Operating Systems CPU Scheduling Overview: CPU Scheduling CPU bursts and I/O bursts Scheduling Criteria Scheduling Algorithms Multiprocessor
TDDI4 Concurrent Programming, Operating Systems, and Real-time Operating Systems CPU Scheduling Overview: CPU Scheduling CPU bursts and I/O bursts Scheduling Criteria Scheduling Algorithms Multiprocessor
416 Distributed Systems
 416 Distributed Systems RAID, Feb 26 2018 Thanks to Greg Ganger and Remzi Arapaci-Dusseau for slides Outline Using multiple disks Why have multiple disks? problem and approaches RAID levels and performance
416 Distributed Systems RAID, Feb 26 2018 Thanks to Greg Ganger and Remzi Arapaci-Dusseau for slides Outline Using multiple disks Why have multiple disks? problem and approaches RAID levels and performance
Single-part-type, multiple stage systems. Lecturer: Stanley B. Gershwin
 Single-part-type, multiple stage systems Lecturer: Stanley B. Gershwin Flow Line... also known as a Production or Transfer Line. M 1 B 1 M 2 B 2 M 3 B 3 M 4 B 4 M 5 B 5 M 6 Machine Buffer Machines are
Single-part-type, multiple stage systems Lecturer: Stanley B. Gershwin Flow Line... also known as a Production or Transfer Line. M 1 B 1 M 2 B 2 M 3 B 3 M 4 B 4 M 5 B 5 M 6 Machine Buffer Machines are
THE WEAKEST FAILURE DETECTOR FOR SOLVING WAIT-FREE, EVENTUALLY BOUNDED-FAIR DINING PHILOSOPHERS. A Dissertation YANTAO SONG
 THE WEAKEST FAILURE DETECTOR FOR SOLVING WAIT-FREE, EVENTUALLY BOUNDED-FAIR DINING PHILOSOPHERS A Dissertation by YANTAO SONG Submitted to the Office of Graduate Studies of Texas A&M University in partial
THE WEAKEST FAILURE DETECTOR FOR SOLVING WAIT-FREE, EVENTUALLY BOUNDED-FAIR DINING PHILOSOPHERS A Dissertation by YANTAO SONG Submitted to the Office of Graduate Studies of Texas A&M University in partial
Clocks in Asynchronous Systems
 Clocks in Asynchronous Systems The Internet Network Time Protocol (NTP) 8 Goals provide the ability to externally synchronize clients across internet to UTC provide reliable service tolerating lengthy
Clocks in Asynchronous Systems The Internet Network Time Protocol (NTP) 8 Goals provide the ability to externally synchronize clients across internet to UTC provide reliable service tolerating lengthy