Describing convex semialgebraic sets by linear matrix inequalities. Markus Schweighofer. Universität Konstanz
|
|
|
- Raymond Dennis
- 6 years ago
- Views:
Transcription
1 Describing convex semialgebraic sets by linear matrix inequalities Markus Schweighofer Universität Konstanz Convex algebraic geometry, optimization and applications American Institute of Mathematics, Palo Alto, California September 21-25, 2009 Introduction
2 Describing convex semialgebraic sets by LMIs A semialgebraic set in R n is a subset of R n defined by a boolean combination of polynomial inequalities. A basic closed semialgebraic set in R n is the solution set of a finite system of non-strict polynomial inequalities. In other words, a set S R n is a basic closed semialgebraic set if S can be written as S = {x R n g 1 (x) 0,...,g m (x) 0} for some m N and some polynomials g 1,...,g m R[ X ]. Here and throughout the talk X := (X 1,...,X n ) is an n-tuple of variables and R[ X ]:=R[X 1,...,X n ] denotes the algebra of real polynomials in n variables. Describing convex semialgebraic sets by LMIs A semialgebraic set in R n is a subset of R n defined by a boolean combination of polynomial inequalities. A basic open semialgebraic set in R n is the solution set of a finite system of strict polynomial inequalities. In other words, a set S R n is a basic open semialgebraic set if S can be written as S = {x R n g 1 (x) > 0,...,g m (x) > 0} for some m N and some polynomials g 1,...,g m R[ X ]. Here and throughout the talk X := (X 1,...,X n ) is an n-tuple of variables and R[ X ]:=R[X 1,...,X n ] denotes the algebra of real polynomials in n variables.
3 Describing convex semialgebraic sets by LMIs Finiteness Theorem. Every closed semialgebraic set is a finite union of basic closed ones. Theorem (Bröcker & Scheiderer 1989). Every basic closed semialgebraic set in R n can be defined by a system of at most n(n+1) 2 non-strict polynomial inequalities. The proofs are hard and non-constructive. See, e.g., Bochnak & Coste & Roy: Real algebraic geometry, Springer (1998) Very special cases have been done constructively by vom Hofe, Bernig, Grötschel, Henk, Bosse and Averkov, see, e.g., Averkov: Representing elementary semi-algebraic sets by a few polynomial inequalities: A constructive approach Describing convex semialgebraic sets by LMIs Finiteness Theorem. Every open semialgebraic set is a finite union of basic open ones. Theorem (Bröcker & Scheiderer 1989). Every basic open semialgebraic set in R n can be defined by a system of at most n strict polynomial inequalities. The proofs are hard and non-constructive. See, e.g., Bochnak & Coste & Roy: Real algebraic geometry, Springer (1998) Very special cases have been done constructively by vom Hofe, Bernig, Grötschel, Henk, Bosse and Averkov, see, e.g., Averkov: Representing elementary semi-algebraic sets by a few polynomial inequalities: A constructive approach
4 Describing convex semialgebraic sets by LMIs Example. S := ({(x, y) R 2 x x 2 2 1} ([ 1, 1] [0, 1])) [0, 1]2 is closed and semialgebraic but not basic closed. Indeed, by way of contradiction assume S = {x R n g 1 (x) 0,...,g m (x) 0}. Looking at the green points, one of the g i could be written as g i = h (1 X 2 1 X 2 2 )k for some odd k 1andh R[X 1, X 2 ] not divisible by 1 X 2 1 X 2 2. Looking at the orange points, h would be divisible by 1 X 2 1 X 2 2. x 2 x 1 Describing convex semialgebraic sets by LMIs AconvexsubsetF = of a convex set S is called a face of S if any line segment L S whose relative interior intersects F is actually contained in F. In particular: If S =, then S is always a face of itself. Any other face of S is contained in the boundary of S. AsingletonF = {x} is a face of S if and only if x is an extreme point of S. Proposition. Let S R n be convex. Then (a) Any face of a face of S is a face of S. (b) If F 1, F 2 are faces of S and F 1 F 2, then dim F 1 < dim F 2. (c) The intersection of any two faces of S is again a face of S. (d) S is the disjoint union of the relative interiors of its faces.
5 Describing convex semialgebraic sets by LMIs By a hyperplane, we understand here an affine linear subspace of codimension one in R n. Any hyperplane divides R n into two closed or open half-spaces. Closed convex sets can be characterized as the intersections of closed half-spaces. Let S R n be convex. A supporting hyperplane of S is a hyperplane H such that S H = and S is contained entirely in one of the two closed half-spaces determined by H. If H is a supporting hyperplane of S, then S H is a face of S. These faces as well as S itself are called exposed faces of S. Describing convex semialgebraic sets by LMIs Example. The faces of S := (B 1 (0) ([ 1, 1] [0, 1])) [0, 1] 2 are S, [ 1, 1] {0}, {1} [0, 1], [0, 1] {1}, {(1, 0)}, {(1, 1)} and each point in the second quadrant on the unit circle. Only one of them is non-exposed, namely {(0, 1)}. non-exposed face x 2 x 1
6 Describing convex semialgebraic sets by LMIs We will try to describe (in two different ways) convex semialgebraic sets by LMIs. To define LMIs and for later use, we consider matrix polynomials (also called polynomial matrices), i.e., elements of R[ X ] s t. The degree of a matrix polynomial is the maximal degree of its entries. A linear matrix polynomial is a matrix polynomial of degree at most 1, i.e., of the form A 0 + X 1 A X n A n for matrices A i R s t. Describing convex semialgebraic sets by LMIs Let A SR t t. A 0 A positive semidefinite Av, v 0forallv R t all eigenvalues of A are 0 all coefficients of det(a + TI t ) R[T ] are 0 det((a ij ) i,j J ) 0forallJ {1,...,t}
7 Describing convex semialgebraic sets by LMIs Let A SR t t. A 0 A positive //// semidefinite Av, v > 0forallv R t \{0} all eigenvalues of A are > 0 all coefficients of det(a + TI t ) R[T ] are > 0 det((a ij ) i,j J ) > 0forallJ {1,...,t} det((a ij ) i,j {1,...,k} ) > 0 for all k {1,...,t} Describing convex semialgebraic sets by LMIs Let A SR t t. A 0 A positive semidefinite Av, v 0forallv R t all eigenvalues of A are 0 all coefficients of det(a + TI t ) R[T ] are 0 det((a ij ) i,j J ) 0forallJ {1,...,t} An inequality of the form A(x) :=A 0 + x 1 A x n A n 0 (x R n ) with A 0,...,A n SR t t will be called linear matrix inequality. This corresponds to the family of linear inequalities parametrized by v R t. A(x)v, v 0 (x R n )
8 Describing convex semialgebraic sets by LMIs x 2 x 1 x 2 x 1 a a b c x 2 1 x 1 b 0 x 1 x 1 x 2 c 1 a, b, c independant and normally distributed 0 1 x 1 Describing convex semialgebraic sets by LMIs Three ways to say what is a polyhedron: It is the solution set of a finite system of linear inequalities. It is the set of all x R n such that A(x) 0 for a diagonal linear matrix polynomial. It is the intersection of finitely many closed half-spaces. Two and a half ways to define a spectrahedron: It is the solution set of an LMI. It is the set of all x R n such that A(x) 0 for a symmetric linear matrix polynomial. It is the intersection of a nicely parametrized family of closed half-spaces. Polyhedra are easy to deal with algorithmically. For example, you can use linear programming to optimize a given linear function on them. Spectrahedra seem to be easy to deal with algorithmically. For example, you can use semidefinite programming to optimize a given linear function on them.
9 Describing convex semialgebraic sets by LMIs Based on diagonalization of symmetric matrices, spectrahedra share many good properties with polyhedra. While projections of polyhedra are still polyhedra, projections of spectrahedra are convex and semialgebraic but nothing else is known about them. In recent years, results of Helton & Vinnikov as well as Helton & Nie showed that surprisingly many convex semialgebraic sets are spectrahedra or projections of spectrahedra. Describing convex semialgebraic sets by LMIs Let S R n. We call a symmetric linear matrix polynomial A SR[ X ] t t an LMI representation of S if S = {x R n A(x) 0}. If Ȳ is an m-tuple of additional variables, then we call a symmetric linear matrix polynomial A SR[ X, Ȳ ] t t a semidefinite representation of S if S = {x R n y R m : A(x, y) 0}. Hence S is a spectrahedron if and only if it is LMI representable, and S is a projection of a spectrahedron if and only if it is semidefinitely representable.
10 Describing convex semialgebraic sets by LMIs If V is a finite-dimensional R-vector space, one can identify V with R n by fixing a basis. Then one can speak about the properties of a set S V being open, closed, semialgebraic, basic open, basic closed, bounded, convex, a spectrahedron, semidefinitely representable and so on. All these notions are unambigously defined since they do not depend on the chosen basis as the change of bases is given by an invertible linear map. Describing convex semialgebraic sets by LMIs This talk is divided into two parts: Part I. Spectrahedra This will lead us to determinantal representations of polynomials. Part II. Semidefinitely representable sets This will lead us to sums of squares representations of polynomials.
11 Part I. Spectrahedra Spectrahedra and their properties Let S R n be a spectrahedron. Then S is convex, S is a basic closed semialgebraic set, and all faces of S are exposed. Indeed, if A SR[ X ] t t is a symmetric linear matrix polynomial such that S = {x R n A(x) 0}, then it is an exercise to show that every face of S is of the form {x S U ker A(x)} where U is a linear subspace of R n. But if U = Ru Ru k, then {x S U ker A(x)} = {x S A(x)u 1, u 1 + +A(x)u k, u k = 0} is empty or an exposed face of S since S {x R n A(x)u 1, u A(x)u k, u k 0}.
12 Spectrahedra and their properties Let S R n be a spectrahedron. Then S is convex, S is a basic closed semialgebraic set, and all faces of S are exposed. This three properties do not characterize spectrahedra. We will now learn about another property of polyhedra called rigid convexity which is strictly stronger and which is conjectured to characterize spectrahedra. The basic closed semialgebraic set {x R 2 x1 4 + x 2 4 1} is convex and has only exposed faces but we will see that it is not a spectrahedron. The reason for this will be that it is not rigidly convex. x 2 x x x 1 Towards a characterization of spectrahedra In the following, we will define a condition called rigid convexity for convex sets S with non-empty interior. If such S is rigidly convex, then it will be a basic closed semialgebraic convex set with only exposed faces, and it is conjectured that it is even a spectrahedron. Aconvexsethasalwaysnon-emptyinteriorinitsaffine hull. By identifying this affine hull with R k (for some k n), one could define rigid convexity for all convex sets. Thus the assumption that the interior of S is non-empty is not essential and just made for simplicity.
13 Towards a characterization of spectrahedra Let S R n be a spectrahedron and x 0 S. Then one can find A SR[ X ] t t with A(x 0 ) 0 such that S = {x R n A(x) 0}. Given such an LMI representation, let p := det A R[ X ] and C the connected component of x 0 in {x R n p(x) > 0}. Then S = C and p is a real zero polynomial at x 0 in the following sense: p(x 0 ) > 0 & x R n : λ C: (p(x 0 + λx) =0 = λ R) Why? Without loss of generality x 0 = 0. Then we have A i SR t t with A 0 0suchthatp = det A = det(a 0 + X 1 A X n A n ). Let x R n and λ C such that 0 = p(x 0 + λx) = p(0 + λx) =det(a(λx)) = det(a 0 + λ(x 1 A x n A n )) = det(p (A 0 + λ(x 1 A x n A n ))P) (P R t t ) = det(p A 0 P + λp (x 1 A x n A n )P) (P A 0 P = I t ) = det(i t + λb) (B SR t t ) and therefore det(b + 1 λ I t)=0 whence 1 λ R and λ R. Towards a characterization of spectrahedra Let S R n be a spectrahedron and x 0 S. Then one can find A SR[ X ] t t with A(x 0 ) 0 such that S = {x R n A(x) 0}. Given such an LMI representation, let p := det A R[ X ] and C the connected component of x 0 in {x R n p(x) > 0}. Then S = C and p is a real zero polynomial at x 0 in the following sense: p(x 0 ) > 0 & x R n : λ C: (p(x 0 + λx) =0 = λ R) S is an algebraic interior in the following sense: p R[ X ]: connected component C of {x R n p(x) > 0}: S = C If the degree of p is minimal, we call p the minimal polynomial of S (unique up to constant factor c > 0). The minimal polynomial of S divides in R[ X ] every other polynomial p of this kind. In particular, our spectrahedron S is rigidly convex in the following sense: S is an algebraic interior & x 0 S : min. pol. of S is RZ at x 0
14 Algebraic interiors, minimal polynomials and rigid convexity minimal polynomial 1 X 2 Y 2, rigidly convex Y X Algebraic interiors, minimal polynomials and rigid convexity minimal polynomial X 2 + Y 2 1, not rigidly convex Y X
15 Algebraic interiors, minimal polynomials and rigid convexity minimal polynomial 1 X 4 Y 4, not rigidly convex Y X Algebraic interiors, minimal polynomials and rigid convexity minimal polynomial X 4 + Y 4 1, not rigidly convex Y X
16 Algebraic interiors, minimal polynomials and rigid convexity minimal polynomial Y X 2 1, rigidly convex Y X Algebraic interiors, minimal polynomials and rigid convexity minimal polynomial Y + X 2 + 1, not rigidly convex Y X
17 Algebraic interiors, minimal polynomials and rigid convexity minimal polynomial XY 1, rigidly convex Y X Algebraic interiors, minimal polynomials and rigid convexity minimal polynomial XY 1, rigidly convex Y X
18 Algebraic interiors, minimal polynomials and rigid convexity minimal polynomial 1 XY, not rigidly convex Y X Algebraic interiors, minimal polynomials and rigid convexity minimal polynomial X 3 X 2 X Y 2 + 1, rigidly convex Y X
19 Algebraic interiors, minimal polynomials and rigid convexity minimal polynomial X 3 X 2 X Y 2 + 1, not rigidly convex Y X Algebraic interiors, minimal polynomials and rigid convexity minimal polynomial X 3 + X 2 + X + Y 2 1, not rigidly convex Y X
20 Towards a characterization of spectrahedra Proposition (Gårding 1959). If S is rigidly convex, then the minimal polynomial of S has the real zero property at all x 0 S and S is convex. We have seen that a spectrahedron with non-empty interior is rigidly convex.the first big question of the talk is if the converse is true. Theorem (Helton & Vinnikov 2007). Every rigidly convex set S R 2 is a spectrahedron. This is a consequence of the 1958 Lax conjecture: Lax conjecture (1958) For all p R[X 1, X 2 ] RZ at 0 of degree d, there exist A i SR d d such that A 0 0 and p = det(a 0 + X 1 A 1 + X 2 A 2 ). Towards a characterization of spectrahedra Proposition (Gårding 1959). If S is rigidly convex, then the minimal polynomial of S has the real zero property at all x 0 S and S is convex. We have seen that a spectrahedron with non-empty interior is rigidly convex.the first big question of the talk is if the converse is true. Theorem (Helton & Vinnikov 2007). Every rigidly convex set S R 2 is a spectrahedron. This is a consequence of the 1958 Lax conjecture: Theorem (Helton & Vinnikov 2007). For all p R[X 1, X 2 ] RZ at 0 of degree d, there exist A i SR d d such that A 0 0 and p = det(a 0 + X 1 A 1 + X 2 A 2 ).
21 Towards a characterization of spectrahedra Proposition (Gårding 1959). If S is rigidly convex, then the minimal polynomial of S has the real zero property at all x 0 S and S is convex. We have seen that a spectrahedron with non-empty interior is rigidly convex.the first big question of the talk is if the converse is true. Conjecture (Helton & Vinnikov 2007). Every rigidly convex set S R n is a spectrahedron. This would be a consequence of the generalized Lax conjecture: Conjecture (Helton & Vinnikov 2007). For all p R[ X ] RZ at 0, there exist t N and A i SR t t such that A 0 0 and p = det(a 0 + X 1 A X n A n ). Towards a characterization of spectrahedra Proposition (Gårding 1959). If S is rigidly convex, then the minimal polynomial of S has the real zero property at all x 0 S and S is convex. We have seen that a spectrahedron with non-empty interior is rigidly convex.the first big question of the talk is if the converse is true. Conjecture (Helton & Vinnikov 2007). Every rigidly convex set S R n is a spectrahedron. Theorem (Helton & McCullough & Vinnikov 2006). For all p R[ X ], there exist t N and A i SR t t such that p = det(a 0 + X 1 A X n A n ). New demonstration bypassing polynomials in non-commuting variables and giving an explicit construction: Quarez
22 Literature on rigid convexity and determinantal representations of real zero polynomials Helton & Vinnikov: Linear matrix inequality representation of sets Comm. Pure Appl. Math. 60 (2007), no. 5, Lewis & Parrilo & Ramana: The Lax conjecture is true Proc. Amer. Math. Soc. 133 (2005), no. 9, Literature on determinantal representations of arbitrary polynomials Helton & McCullough & Vinnikov: Noncommutative convexity arises from linear matrix inequalities J. Funct. Anal. 240 (2006), no. 1, http: //math.ucsd.edu/~helton/osiris/noncommineq/convrat.ps Quarez: Symmetric determinantal representation of polynomials
23 Trivial determinantal representations in one variable Determinantal representations in several variables go far beyond the scope of this talk. But as an example, we take a closer look at the case of one variable. By factorization of univariate polynomials over R into linear and quadratic factors, it is clear that each univariate polynomial has a determinantal representation (useless in practice) since det c X a 0 X a =(X a) 2 + c. If p R[X ] is a real zero polynomial, i.e., p(0) > 0and p = d i=1 c(x a i) for some a i, c R, then p = p(0) d (1 1 X )=p(0) det a i i=1 1 I d X Diag,..., 1. a 1 a d Effective determinantal representations in one variable Given a polynomial p Q[X ] of degree d = r + 2s with at least r real zeros (counted with multiplicity), Quarez constructs A SQ d d such that p = det(j + X A) where J = Diag(1,...,1, 1, 1,...,1, 1). r times s times Theorem (Quarez). If p R[X ] is of degree d = r + 2s with p(0) = 0. Then p possesses at least r real zeros if and only if there is A SR d d such that p = det(j + X A) with J = Diag(1,...,1, 1, 1,...,1, 1). r times s times Quarez: Sturm and Sylvester algorithms revisited via tridiagonal determinantal representations Quarez: Représentations déterminantales effectives des polynômes univariés par les matrices flèches
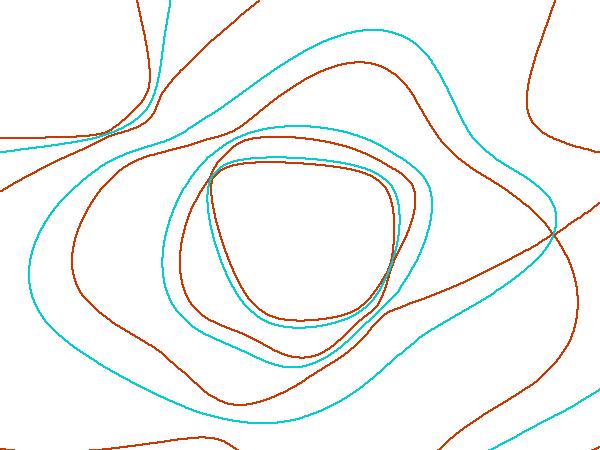
24 Definition. Let p R[ X ] be a real zero polynomial of degree d. Then we call X R k p := k X0 d p X 0 X0 =1 X k 0 the k-th Renegar derivative of p. Attention: R 2 = R R. Example. Let p = X 3 1 X 2 1 X 1 X R[X 1, X 2 ]. Then p is a real zero polynomial (see picture) and its Renegar derivatives are Rp = X 2 1 2X 1 X and R2 p = 2X X 2 X 1 Theorem (Renegar 2006). Let S R n be rigidly convex with 0 S and minimal polynomial p of degree d. Then each R k p (k {0,...,d 1}) isareal zero polynomial, and the connected components S (k) of 0 in {x R n R k (x) > 0} form an ascending chain S = S (0) S (1) S (2) S (d 1). Moreover, S is basic closed and has only exposed faces. More precisely, S = {x R n p(x) 0, Rp(x) 0,...,R d 1 p(x) 0}, and for x S and k {0,...,d 1} maximal such that x S (k), there is a unique supporting hyperplane of S (k) at x, and this hyperplane exposes the face in whose relative interior lies x. X 2 exposed face X 1
25
26
27
28
29 Renegar: Hyperbolic programs, and their derivative relaxations Found. Comput. Math. 6 (2006), no. 1,
30 Example on the proven Lax conjecture We have seen geometrically (see below) that p = X 3 1 X 2 1 X 1 X R[X 1, X 2 ] is a real zero polynomial. Since Helton and Vinnikov have proved the Lax conjecture, there must be A SR[ X ] 3 3 with A(0) 0 and 2 2X1 X 2 1 X 1 p = det A. Indeed, setting A := X 2 1 X 1 0, we have 1 X p = det A and A(0) = 0. How to compute this in general? X 2 X 1 Example on the realization as a basic closed set Let again p = det A with A = 2 2X1 X 2 1 X 1 X 2 1 X X seen how to realize the connected of component S of 0 in {x R 2 p(x) 0} as a basic closed set by writing S = {x R 2 p(x) 0, Rp(x) 0, R 2 p(x) 0}.. We have already X 2 X 1
31 Example on the realization as a basic closed set Let again p = det A with A = 2 2X1 X 2 1 X 1 X 2 1 X X seen how to realize the connected of component S of 0 in {x R 2 p(x) 0} as a basic closed set by writing S = {x R 2 p(x) 0, Rp(x) 0, R 2 p(x) 0}. Another way of doing this is to calculate. We have already det(a + TI 3 )=T 3 +(4 3X 1 )T 2 +(X1 2 5X 1 X )T + p and write S = {x R 2 p(x) 0, x1 2 5x 1 x , 4 3x 1 0}. X 2 X 1 Part II. Semidefinitely representable sets
32 Projections of spectrahedrons Recall: If S = {x R n y R k : A(x, y) 0} for some symmetric linear matrix polynomial A R[ X, Ȳ ] t t, we call A a semidefinite representation of S and we say that S is semidefinitely representable. Example R >0 = {x R y R: x 1 1 y 0} Let S be semidefinitely representable. Then S is convex and S is semialgebraic. Indeed, recall that by Tarski s real quantifier elimination every projection of a semialgebraic set is semialgebraic. Second big question of the talk: Question (Nemirovski, International Congress of Mathematicians, Madrid 2006) Is every convex semialgebraic set semidefinitely representable? Nemirovski s question Question (Nemirovski, International Congress of Mathematicians, Madrid 2006) Is every convex semialgebraic set semidefinitely representable? Nemirovski: Advances in convex optimization: conic programming International Congress of Mathematicians. Vol. I, , Eur. Math. Soc., Zürich, download?doi= &rep=rep1&type=pdf Example. We have seen that S := {(x 1, x 2 ) R 2 x1 4 + x 2 4 1} is not aspectrahedron.however,itissemidefinitelyrepresentablesince S = {(x 1, x 2 ) R 2 y 1, y 2 R : = (x 1, x 2 ) R 2 y 1, y 2 R : 1+y1 y 2 1 y 1 y 2 1 y 2 1 y & y 1 x 2 1 & y 2 x 2 2 } 0 & y 1 x 1 x & y2 x 2 x
33 How to find semidefinite representations Let U be a subset of a convex set S. Recall that S is the disjoint union of the relative interiors of its faces. Netzer defines U S as the union of the relative interiors of all faces intersecting U. Theorem (Netzer). If U S R n are semidefinitely representable sets. Then U S is again semidefinitely representable. The proof of Netzer is constructive and gives rise to simple explicit constructions which preserve for example rational coefficients in the semidefinite representation. Netzer: On semidefinite representations of sets How to find semidefinite representations Helton and Nie conjectured that every convex semialgebraic set is semidefinitely representable. This is based on their seminal work in which they prove that surprisingly many compact basic closed convex semialgebraic sets are semidefinitely representable. They have two methods: The simple and explicit Lasserre moment constructions. The proof that these relaxations are exact is very deep but works under fairly general hypotheses. Alocalversionoftheseconstructionswhichisgluedtogetherbya non-constructive compactness argument. The proofs are simpler though still deep, and the hypotheses are very general. Each of the methods is scattered over both of the following papers.
34 How to find semidefinite representations First paper Helton & Nie: Semidefinite representation of convex sets to appear in Math. Prog. Second paper Helton & Nie: Sufficient and necessary conditions for semidefinite representability of convex hulls and sets How to find semidefinite representations The basic idea is to use the Lasserre moment relaxation of a basic closed semialgebraic set, or more precisely of a finite system of non-strict polynomial inequalities. We will explain this now. Lasserre: Convex sets with semidefinite representation Math. Prog. 120, no. 2 (2009), SDR-final.pdf
35 System of polynomial inequalities A x x 1 + 2x B x x 2 1 2x 1 x 2 + x C x 2 1 x x x 2 S x 1 conv S S conv S System of polynomial inequalities A y 1 + x 1 + 2x B y 2 + 2y 3 2x 1 x 2 + x C y 3 x x y x 2 x 1 conv S
36 System of linear inequalities A y 1 + x 1 + 2x B y 2 + 2y 3 2y 4 + y C y 3 y 5 + x y x 2 x 1 conv S System of polynomial inequalities Attempt to linearize after adding redundant inequalities A x1 3 + x 1 + 2x B x x1 2 2x 1 x 2 + x C x1 2 x2 2 + x redundant: AB x1 3x x x AC x x 1 + 8x ABC x1 5x x x D 2 x1 2 2x 1 x 2 + x2 2 0 D 2 C x x x 1 x 2 + 4x2 2 0

37 System of polynomial inequalities Attempt to linearize after adding redundant inequalities A y 1 + x 1 + 2x B y 2 + 2y 3 2y 4 + y C y 3 y 5 + x irredundant: AB y 6... y x AC y x 1 + 8x ABC y y x D 2 y 3 2y 4 + y 5 0 D 2 C y y 3 + 4y 4 + 4y 5 0 y x 2 x 1 conv S
38 System of polynomial inequalities Attempt to linearize after adding families of redundant inequalities A x x 1 + 2x B x x 2 1 2x 1 x 2 + x C x 2 1 x x redundant families (parametrized by a, b, c,...): (a + bx 1 + cx 2 + dx ex 1 x 2 + f x 2 2 ) 2 0 a b c d e f 1 x 1 x 2 x 2 1 x 1 x 2 x 2 2 a b 1 x1 x 2 x1 2 x 1 x 2 x2 2 c d 0 e f System of polynomial inequalities Attempt to linearize after adding families of redundant inequalities A x x 1 + 2x B x x 2 1 2x 1 x 2 + x C x 2 1 x x redundant families (parametrized by a, b, c,...): (a + bx 1 + cx 2 + dx ex 1 x 2 + f x 2 2 ) 2 0 a b c d e f 1 x 1 x 2 x 2 1 x 1 x 2 x 2 2 x 1 x 2 1 x 1 x 2 x 3 1 x 2 1 x 2 x 1 x 2 2 x 2 x 1 x 2 x 2 2 x 2 1 x 2 x 1 x 2 2 x 3 2 x 2 1 x 3 1 x 2 1 x 2 x 4 1 x 3 1 x 2 x 2 1 x 2 2 x 1 x 2 x1 2x 2 x 1 x2 2 x1 3x 2 x1 2x 2 2 x 1 x2 3 x2 2 x 1 x2 2 x2 3 x1 2x 2 2 x 1 x2 3 x2 4 a b c d e f 0
39 System of polynomial inequalities Attempt to linearize after adding families of redundant inequalities A y 1 + x 1 + 2x B y 2 + 2y 3 2y 4 + y C y 3 y 5 + x irredundant families (parametrized by a, b, c,...): a b c d e f 1 x 1 x 2 y 3 y 4 y 5 x 1 y 3 y 4 y 1 y 6 y 7 x 2 y 4 y 5 y 6 y 7 y 9 y 3 y 1 y 6 y 8 y 10 y 11 y 4 y 6 y 7 y 10 y 11 y 12 y 5 y 7 y 9 y 11 y 12 y 2 a b c d e f 0 System of polynomial inequalities Attempt to linearize after adding families of redundant inequalities A y 1 + x 1 + 2x B y 2 + 2y 3 2y 4 + y C y 3 y 5 + x irredundant families (parametrized by a, b, c,...): 1 x 1 x 2 y 3 y 4 y 5 x 1 y 3 y 4 y 1 y 6 y 7 x 2 y 4 y 5 y 6 y 7 y 9 y 3 y 1 y 6 y 8 y 10 y 11 y 4 y 6 y 7 y 10 y 11 y 12 y 5 y 7 y 9 y 11 y 12 y 2 0
40 System of polynomial inequalities Attempt to linearize after adding families of redundant inequalities A x x 1 + 2x B x x 2 1 2x 1 x 2 + x C x 2 1 x x redundant families (parametrized by a, b, c,...): (a + bx 1 + cx 2 ) 2 ( x 2 1 x x 1 + 4) 0 1 x 1 x 2 a a b c ( x 2 1 x2 2 + x 1 + 4) x 1 x1 2 x 1 x 2 b 0 x 2 x 1 x 2 x2 2 c System of polynomial inequalities Attempt to linearize after adding families of redundant inequalities A y 1 + x 1 + 2x B y 2 + 2y 3 2x 1 x 2 + x C y 3 x x irredundant families (parametrized by a, b, c,...): a b c y 3 x2 2 + x y 1 x 1 x2 2 + y 3 + 4x x1 2x 2 x2 3 + x 1x 2 + 4x a b 0 c
41 System of polynomial inequalities Attempt to linearize after adding families of redundant inequalities A y 1 + x 1 + 2x B y 2 + 2y 3 2y 4 + y C y 3 y 5 + x irredundant families (parametrized by a, b, c,...): a b c y 3 y 5 + x y 1 y 6 + y 3 + 4x y 7 x2 3 + y 4 + 4x a b 0 c System of polynomial inequalities Attempt to linearize after adding families of redundant inequalities A y 1 + x 1 + 2x B y 2 + 2y 3 2y 4 + y C y 3 y 5 + x irredundant families (parametrized by a, b, c,...): y 3 y 5 + x y 1 y 6 + y 3 + 4x y 7 y 8 + y 4 + 4x
![y x 2 x 1 conv S X =(X 1,...,X n ) variables R[ X ] polynomials g 1,...,g m R[ X ] polynomials defining...... the set S := {x R n g 1 (x) 0,.](/docs-images/74/70438575/images/42-0.jpg "..,g m (x) 0} T := { δ {0,1} m s δ g δ 1 1 g δ m m s δ R[ X ] 2 } convex cone in R[ X ] L := L L: R[ X ] R linear, L(1) =1, L(T ) R 0 solution set of the linearized system S := {(L(X")
42 y x 2 x 1 conv S X =(X 1,...,X n ) variables R[ X ] polynomials g 1,...,g m R[ X ] polynomials defining the set S := {x R n g 1 (x) 0,...,g m (x) 0} T := { δ {0,1} m s δ g δ 1 1 g δ m m s δ R[ X ] 2 } convex cone in R[ X ] L := L L: R[ X ] R linear, L(1) =1, L(T ) R 0 solution set of the linearized system S := {(L(X 1 ),...,L(X n )) L L } Schmüdgen relaxation
43 X =(X 1,...,X n ) variables R[ X ] k polynomials of degree at most k g 1,...,g m R[ X ] polynomials defining the set S := {x R n g 1 (x) 0,...,g m (x) 0} T k := { δ {0,1} m s δ g δ 1 1 g δ m m s δ R[ X ] 2, deg(s δ g δ ) k} convex cone in R[ X ] k L k := L L: R[ X ] k R linear, L(1) =1, L(T k ) R 0 solution set of the linearized system (spectrahedron in R[ X ] k ) S k := {(L(X 1 ),...,L(X n )) L L k } k-th Lasserre relaxation (semidefinitely representable) X =(X 1,...,X n ) variables R[ X ] k polynomials of degree at most k g 1,...,g m R[ X ] polynomials defining the set S := {x R n g 1 (x) 0,...,g m (x) 0} T k := { δ {0,1} m s δ g δ 1 1 g δ m m s δ R[ X ] 2, deg(s δ g δ ) k} convex cone in R[ X ] k L k := L L: R[ X ] k R linear, L(1) =1, L(T k ) R 0 solution set of the linearized system (spectrahedron in R[ X ] k ) S k := {(L(X 1 ),...,L(X n )) L L k } k-th Lasserre relaxation (semidefinitely representable) We have S conv S S... S4 S 3 S 2 S 1. The question is whether conv S = Sk for some k N.
44 Suppose S = and fix k N := {1, 2, 3,...}. Proposition (Powers & Scheiderer 2005). If S has non-empty interior, then T k is closed in R[ X ] k. Proposition. If S is compact, then conv S is closed in R n. Proposition. T k = {f R[ X ] L L k : L(f ) 0}. Remark. conv S = {f 1 (R 0 ) f R[ X ] 1, f _> 0onS} Proposition. S k = {f 1 (R 0 ) f R[ X ] 1 T k }. Proposition. If conv S is closed, then conv S = S k f R[ X ] 1 :(f _> 0onS = f T k ). Suppose S is compact. Theorem (Schmüdgen 1991). (a) L L: probability measure µ on S : p R[ X ]: L(p) = pdµ (b) f R[ X ]: (f > 0onS = f T ) Corollary. conv S = S Theorem (2004). For f R[ X ], f = α N n a α1 + +α n α α 1... α n X α, a α R, we define f := max{ a α α N n }. Suppose = S ( 1, 1) n.then there is a constant c N (depending only on n, m and g 1,...,g m ) such that, for each f R[ X ] d with f := min{f (x) x S} > 0, we have f T k for some k cd d 2 n d f c f.
45 Suppose S is compact. Theorem (Schmüdgen 1991). (a) L L: probability measure µ on S : p R[ X ]: L(p) = pdµ (b) f R[ X ]: (f > 0onS = f T ) Corollary. conv S = S Theorem (2004). For f R[ X ], f = α N n a α1 + +α n α α 1... α n X α, a α R, we define f := max{ a α α N n }. Suppose = S ( 1, 1) n.then there is a constant c N (depending only on n, m and g 1,...,g m ) such that, for each f R[ X ] 1 with f := min{f (x) x S} > 0, we have f T k for some k c 1 + n f c f. Suppose S is compact. Theorem (Schmüdgen 1991). (a) L L: probability measure µ on S : p R[ X ]: L(p) = pdµ (b) f R[ X ]: (f > 0onS = f T ) Corollary. conv S = S Theorem (2004). For f R[ X ], f = α N n a α1 + +α n α α 1... α n X α, a α R, we define f := max{ a α α N n }. Suppose = S ( 1, 1) n.then there is a constant c N (depending only on n, m and g 1,...,g m ) such that, for each f R[ X ] 1 with f := min{f (x) x S} > 0, we have f T k for some k c 1 + f f c. Corollary. c N : k N c : x S k : dist(x, conv S) c c k
46 Suppose S is compact. Theorem (Schmüdgen 1991). For all f R[ X ]: f > 0onS = p δ R[ X ] 1 : f = δ {0,1} p δp T δ g δ Corollary (Hol & Scherer 2008). For all F SR[ X ] t t : F 0onS = P δ R[ X ] t : F = δ {0,1} P δp T δ g δ Proof (S.). Given F R[ X ] t t with F 0onS, we consider f := Y R[ X, Y ] and observe that f > 0on S F := {(x, y) R n+1 x S, yeigenvalueoff(x)} = {(x, y) g 1 (x) 0,...,g m (x) 0, P F (x, y) =0} where P F R[ X ][Y ]=R[ X, Y ] is the characteristic polynomial of F. Apply Schmüdgen to f = Y. Use R[ X, Y ] R[ X, F ] R[ X ] t t (R[ X, F ] is commutative). Since P F ( X, F )=0byCayley-Hamilton, p F disappears in this representation. Now use that matrix calculations can be done in blocks! Problem: We do not get degree bounds like for Schmüdgen in this way. Theorem (Helton & Nie). For F = α N n A α1 + +α n α α 1... α n X α, A α SR t t, we define F := max{a α α N n }. Suppose = S ( 1, 1) n.then there is a constant c N (depending only on n, m and g 1,...,g m ) such that, for each F SR[ X ] t t d with F := min{λ min (F (x)) x S} > 0, we have F = δ {0,1} P δpδ T g δ for certain P δ SR[ X ] t k with k cd d 2 n d F c F.
47 Prestel: Bounds for representations of polynomials positive on compact semi-algebraic sets Valuation theory and its applications, Vol. I (Saskatoon, SK, 1999), , Fields Inst. Commun., 32, Amer. Math. Soc., download?doi= &rep=rep1&type=pdf S.: An algorithmic approach to Schmüdgen s Positivstellensatz J. Pure Appl. Algebra 166 (2002), publications/schmuedgen.pdf S.: On the complexity of Schmüdgen s Positivstellensatz J. Complexity 20, no. 4 (2004), S.: Optimization of polynomials on compact semialgebraic sets SIAM J. Opt. 15, no. 3 (2005), publications/convergence.pdf Hol & Scherer: Matrix sum-of-squares relaxations for robust semi-definite programs Math. Prog. 107, no. 1-2 (2006), &rep=rep1&type=pdf Nie & S.: On the complexity of Putinar s Positivstellensatz J. Complexity 23, no. 1 (2007), Klep & S.: Pure states, positive matrix polynomials and sums of hermitian squares
48 Concavity The following terminology is not standard but suitable to us. It is a kind of local concavity of a function which can be detected by looking at its second derivative. Definition. Let p R[ X ] and U R n. p strictly concave on U : D 2 p 0onU p strictly quasiconcave on U : x U : v R n \{0}: D 2 p(x)[v, v] < 0 x U : v R n \{0}: (Dp(x)[v] =0 = D 2 p(x)[v, v] < 0) Suppose S is compact, convex and has non-empty interior. Lemma (Helton & Nie). If each g i is strictly concave on S, then S = Sk for some k N. Idea of proof. Let u S and f R[ X ] 1 \{0} with f 0onS and f (u) =0. To show: f T k for some k N which is independent of f. Since the Slater condition is satisfied, we get Lagrange multipliers λ i 0, i I := {i g i (u) =0}, such that D(f i I λ ig i )(u) =0. Now we have for x R n f (x) i I λ i g i (x) = 1 t 0 0 D 2 (f i I λ i g i )(u+s(x u))[x u, x u]ds dt
49 Suppose S is compact, convex and has non-empty interior. Lemma (Helton & Nie). If each g i is strictly concave on S, then S = Sk for some k N. Idea of proof. Let u S and f R[ X ] 1 \{0} with f 0onS and f (u) =0. To show: f T k for some k N which is independent of f. Since the Slater condition is satisfied, we get Lagrange multipliers λ i 0, i I := {i g i (u) =0}, such that D(f i I λ ig i )(u) =0. Now we have for x R n f (x) i I λ i g i (x) = 1 t 0 0 D 2 ( i I λ i g i )(u+s(x u))[x u, x u]ds dt Suppose S is compact, convex and has non-empty interior. Lemma (Helton & Nie). If each g i is strictly concave on S, then S = Sk for some k N. Idea of proof. Let u S and f R[ X ] 1 \{0} with f 0onS and f (u) =0. To show: f T k for some k N which is independent of f. Since the Slater condition is satisfied, we get Lagrange multipliers λ i 0, i I := {i g i (u) =0}, such that D(f i I λ ig i )(u) =0. Now we have for x R n f (x) i I λ i g i (x) = i I λ i 1 t 0 0 D 2 g i (u+s(x u))[x u, x u]ds dt
50 Suppose S is compact, convex and has non-empty interior. Lemma (Helton & Nie). If each g i is strictly concave on S, then S = Sk for some k N. Idea of proof. Let u S and f R[ X ] 1 \{0} with f 0onS and f (u) =0. To show: f T k for some k N which is independent of f. Since the Slater condition is satisfied, we get Lagrange multipliers λ i 0, i I := {i g i (u) =0}, such that D(f i I λ ig i )(u) =0. Now we have for x R n f (x) i I λ i g i (x) = i I λ i 1 t D 2 g i (u + s(x u))ds dt 0 0 =:F i,u (x) F i,u SR[X ] n n, F i,u 0onS, use Hol & Scherer with bounds! [x u, x u] Suppose S is compact, convex and has non-empty interior. Lemma (Helton & Nie). If each g i is strictly concave on S, then S = Sk for some k N. Idea of proof. Let u S and f R[ X ] 1 \{0} with f 0onS and f (u) =0. To show: f T k for some k N which is independent of f. Since the Slater condition is satisfied, we get Lagrange multipliers λ i 0, i I := {i g i (u) =0}, such that D(f i I λ ig i )(u) =0. Now we have f i I λ i g i = i I λ i ( X u) T F i,u ( X u) F i,u SR[X ] n n, F i,u 0onS, use Hol & Scherer with bounds!
51 Suppose S is compact, convex and has non-empty interior. Lemma (Helton & Nie). If each g i is strictly concave on S, then S = Sk for some k N. Idea of proof. Let u S and f R[ X ] 1 \{0} with f 0onS and f (u) =0. To show: f T k for some k N which is independent of f. Since the Slater condition is satisfied, we get Lagrange multipliers λ i 0, i I := {i g i (u) =0}, such that D(f i I λ ig i )(u) =0. Now we have f λ i g i = λ i ( X u) T P i,u,δ Pi,u,δ T g δ ( X u) i I i I δ {0,1} m F i,u SR[X ] n n, F i,u 0onS, use Hol & Scherer with bounds! Suppose S is compact, convex and has non-empty interior. Lemma (Helton & Nie). If each g i is strictly concave on S, then S = Sk for some k N. Idea of proof. Let u S and f R[ X ] 1 \{0} with f 0onS and f (u) =0. To show: f T k for some k N which is independent of f. Since the Slater condition is satisfied, we get Lagrange multipliers λ i 0, i I := {i g i (u) =0}, such that D(f i I λ ig i )(u) =0. Now we have f λ i g i = λ i (Pi,u,δ T ( X u)) T (Pi,u,δ T ( X u))g δ i I i I δ {0,1} m F i,u SR[X ] n n, F i,u 0onS, use Hol & Scherer with bounds!
52 Suppose S is compact, convex and has non-empty interior. Theorem (Helton & Nie). If each g i is strictly quasiconcave on S, then S = Sk for some k N. Theorem (Helton & Nie). Suppose each g i is strictly quasiconcave on S {g i = 0} and averyuglyadditionalhypothesisisfulfilledthat might follow from this. Then S = Sk for some k N. Lemma (Netzer & Sinn, bounded case: Helton & Nie). The convex hull of finitely many semidefinitely representable sets is again semidefinitely representable. Netzer & Sinn: A note on the convex hull of finitely many projections of spectrahedra This enables Helton and Nie to show non-constructively the following theorem, glueing together local moment constructions. Theorem (Helton & Nie). Suppose S is compact, each g i is strictly quasiconcave on S ( conv S) {g i = 0} and the boundary of S is contained in the closure of the interior of S. Then conv S is semidefinitely representable.
53 Suppose S is convex and S =. Theorem (Netzer & Plaumann & S.) If S = Sk all faces of S are exposed. for some k N, then Example. S = {(x 1, x 2 ) R 2 1 x 1, x 3 1 x 2, 0 x 2 1} x 2 x 1 k N: S = S k (no matter how g 1,...,g m are chosen) non-exposed face Netzer & Plaumann & S.: Exposed faces of semidefinite representable sets
NOTES ON HYPERBOLICITY CONES
 NOTES ON HYPERBOLICITY CONES Petter Brändén (Stockholm) pbranden@math.su.se Berkeley, October 2010 1. Hyperbolic programming A hyperbolic program is an optimization problem of the form minimize c T x such
NOTES ON HYPERBOLICITY CONES Petter Brändén (Stockholm) pbranden@math.su.se Berkeley, October 2010 1. Hyperbolic programming A hyperbolic program is an optimization problem of the form minimize c T x such
Semi-definite representibility. For fun and profit
 Semi-definite representation For fun and profit March 9, 2010 Introduction Any convex quadratic constraint x T C T Cx a + b T x Can be recast as the linear matrix inequality (LMI): ( ) In Cx (Cx) T a +
Semi-definite representation For fun and profit March 9, 2010 Introduction Any convex quadratic constraint x T C T Cx a + b T x Can be recast as the linear matrix inequality (LMI): ( ) In Cx (Cx) T a +
d A 0 + m t k A k 0 whenever λ min (B k (x)) t k λ max (B k (x)) for k = 1, 2,..., m x n B n (k).
) t k λ max (B k (x)) for k = 1, 2,..., m x n B n (k).") MATRIX CUBES PARAMETERIZED BY EIGENVALUES JIAWANG NIE AND BERND STURMFELS Abstract. An elimination problem in semidefinite programming is solved by means of tensor algebra. It concerns families of matrix
MATRIX CUBES PARAMETERIZED BY EIGENVALUES JIAWANG NIE AND BERND STURMFELS Abstract. An elimination problem in semidefinite programming is solved by means of tensor algebra. It concerns families of matrix
Unbounded Convex Semialgebraic Sets as Spectrahedral Shadows
 Unbounded Convex Semialgebraic Sets as Spectrahedral Shadows Shaowei Lin 9 Dec 2010 Abstract Recently, Helton and Nie [3] showed that a compact convex semialgebraic set S is a spectrahedral shadow if the
Unbounded Convex Semialgebraic Sets as Spectrahedral Shadows Shaowei Lin 9 Dec 2010 Abstract Recently, Helton and Nie [3] showed that a compact convex semialgebraic set S is a spectrahedral shadow if the
SPECTRAHEDRA. Bernd Sturmfels UC Berkeley
 SPECTRAHEDRA Bernd Sturmfels UC Berkeley GAeL Lecture I on Convex Algebraic Geometry Coimbra, Portugal, Monday, June 7, 2010 Positive Semidefinite Matrices For a real symmetric n n-matrix A the following
SPECTRAHEDRA Bernd Sturmfels UC Berkeley GAeL Lecture I on Convex Algebraic Geometry Coimbra, Portugal, Monday, June 7, 2010 Positive Semidefinite Matrices For a real symmetric n n-matrix A the following
6-1 The Positivstellensatz P. Parrilo and S. Lall, ECC
 6-1 The Positivstellensatz P. Parrilo and S. Lall, ECC 2003 2003.09.02.10 6. The Positivstellensatz Basic semialgebraic sets Semialgebraic sets Tarski-Seidenberg and quantifier elimination Feasibility
6-1 The Positivstellensatz P. Parrilo and S. Lall, ECC 2003 2003.09.02.10 6. The Positivstellensatz Basic semialgebraic sets Semialgebraic sets Tarski-Seidenberg and quantifier elimination Feasibility
Semidefinite representation of convex sets and convex hulls
 Semidefinite representation of convex sets and convex hulls J. William Helton 1 and Jiawang Nie 2 1 Department of Mathematics, University of California, 9500 Gilman Drive, La Jolla, CA 92093. helton@math.ucsd.edu
Semidefinite representation of convex sets and convex hulls J. William Helton 1 and Jiawang Nie 2 1 Department of Mathematics, University of California, 9500 Gilman Drive, La Jolla, CA 92093. helton@math.ucsd.edu
HYPERBOLICITY CONES AND IMAGINARY PROJECTIONS
 HYPERBOLICITY CONES AND IMAGINARY PROJECTIONS THORSTEN JÖRGENS AND THORSTEN THEOBALD Abstract. Recently, the authors and de Wolff introduced the imaginary projection of a polynomial f C[z] as the projection
HYPERBOLICITY CONES AND IMAGINARY PROJECTIONS THORSTEN JÖRGENS AND THORSTEN THEOBALD Abstract. Recently, the authors and de Wolff introduced the imaginary projection of a polynomial f C[z] as the projection
Semidefinite Programming
 Semidefinite Programming Notes by Bernd Sturmfels for the lecture on June 26, 208, in the IMPRS Ringvorlesung Introduction to Nonlinear Algebra The transition from linear algebra to nonlinear algebra has
Semidefinite Programming Notes by Bernd Sturmfels for the lecture on June 26, 208, in the IMPRS Ringvorlesung Introduction to Nonlinear Algebra The transition from linear algebra to nonlinear algebra has
Exact algorithms: from Semidefinite to Hyperbolic programming
 Exact algorithms: from Semidefinite to Hyperbolic programming Simone Naldi and Daniel Plaumann PGMO Days 2017 Nov 14 2017 - EDF Lab Paris Saclay 1 Polyhedra P = {x R n : i, l i (x) 0} Finite # linear inequalities
Exact algorithms: from Semidefinite to Hyperbolic programming Simone Naldi and Daniel Plaumann PGMO Days 2017 Nov 14 2017 - EDF Lab Paris Saclay 1 Polyhedra P = {x R n : i, l i (x) 0} Finite # linear inequalities
Representations of Positive Polynomials: Theory, Practice, and
 Representations of Positive Polynomials: Theory, Practice, and Applications Dept. of Mathematics and Computer Science Emory University, Atlanta, GA Currently: National Science Foundation Temple University
Representations of Positive Polynomials: Theory, Practice, and Applications Dept. of Mathematics and Computer Science Emory University, Atlanta, GA Currently: National Science Foundation Temple University
ALGEBRA: From Linear to Non-Linear. Bernd Sturmfels University of California at Berkeley
 ALGEBRA: From Linear to Non-Linear Bernd Sturmfels University of California at Berkeley John von Neumann Lecture, SIAM Annual Meeting, Pittsburgh, July 13, 2010 Undergraduate Linear Algebra All undergraduate
ALGEBRA: From Linear to Non-Linear Bernd Sturmfels University of California at Berkeley John von Neumann Lecture, SIAM Annual Meeting, Pittsburgh, July 13, 2010 Undergraduate Linear Algebra All undergraduate
The Geometry of Semidefinite Programming. Bernd Sturmfels UC Berkeley
 The Geometry of Semidefinite Programming Bernd Sturmfels UC Berkeley Positive Semidefinite Matrices For a real symmetric n n-matrix A the following are equivalent: All n eigenvalues of A are positive real
The Geometry of Semidefinite Programming Bernd Sturmfels UC Berkeley Positive Semidefinite Matrices For a real symmetric n n-matrix A the following are equivalent: All n eigenvalues of A are positive real
Convex Optimization. (EE227A: UC Berkeley) Lecture 28. Suvrit Sra. (Algebra + Optimization) 02 May, 2013
 Lecture 28. Suvrit Sra. (Algebra + Optimization) 02 May, 2013") Convex Optimization (EE227A: UC Berkeley) Lecture 28 (Algebra + Optimization) 02 May, 2013 Suvrit Sra Admin Poster presentation on 10th May mandatory HW, Midterm, Quiz to be reweighted Project final report
Convex Optimization (EE227A: UC Berkeley) Lecture 28 (Algebra + Optimization) 02 May, 2013 Suvrit Sra Admin Poster presentation on 10th May mandatory HW, Midterm, Quiz to be reweighted Project final report
LMI MODELLING 4. CONVEX LMI MODELLING. Didier HENRION. LAAS-CNRS Toulouse, FR Czech Tech Univ Prague, CZ. Universidad de Valladolid, SP March 2009
 LMI MODELLING 4. CONVEX LMI MODELLING Didier HENRION LAAS-CNRS Toulouse, FR Czech Tech Univ Prague, CZ Universidad de Valladolid, SP March 2009 Minors A minor of a matrix F is the determinant of a submatrix
LMI MODELLING 4. CONVEX LMI MODELLING Didier HENRION LAAS-CNRS Toulouse, FR Czech Tech Univ Prague, CZ Universidad de Valladolid, SP March 2009 Minors A minor of a matrix F is the determinant of a submatrix
arxiv: v1 [math.oc] 9 Sep 2015
![arxiv: v1 [math.oc] 9 Sep 2015](/thumbs/87/96811437.jpg "arxiv: v1 [math.oc] 9 Sep 2015") CONTAINMENT PROBLEMS FOR PROJECTIONS OF POLYHEDRA AND SPECTRAHEDRA arxiv:1509.02735v1 [math.oc] 9 Sep 2015 KAI KELLNER Abstract. Spectrahedra are affine sections of the cone of positive semidefinite matrices
CONTAINMENT PROBLEMS FOR PROJECTIONS OF POLYHEDRA AND SPECTRAHEDRA arxiv:1509.02735v1 [math.oc] 9 Sep 2015 KAI KELLNER Abstract. Spectrahedra are affine sections of the cone of positive semidefinite matrices
SPECTRAHEDRA. Bernd Sturmfels UC Berkeley
 SPECTRAHEDRA Bernd Sturmfels UC Berkeley Mathematics Colloquium, North Carolina State University February 5, 2010 Positive Semidefinite Matrices For a real symmetric n n-matrix A the following are equivalent:
SPECTRAHEDRA Bernd Sturmfels UC Berkeley Mathematics Colloquium, North Carolina State University February 5, 2010 Positive Semidefinite Matrices For a real symmetric n n-matrix A the following are equivalent:
COURSE ON LMI PART I.2 GEOMETRY OF LMI SETS. Didier HENRION henrion
 COURSE ON LMI PART I.2 GEOMETRY OF LMI SETS Didier HENRION www.laas.fr/ henrion October 2006 Geometry of LMI sets Given symmetric matrices F i we want to characterize the shape in R n of the LMI set F
COURSE ON LMI PART I.2 GEOMETRY OF LMI SETS Didier HENRION www.laas.fr/ henrion October 2006 Geometry of LMI sets Given symmetric matrices F i we want to characterize the shape in R n of the LMI set F
Hyperbolic Polynomials and Generalized Clifford Algebras
 Discrete Comput Geom (2014) 51:802 814 DOI 10.1007/s00454-014-9598-1 Hyperbolic Polynomials and Generalized Clifford Algebras Tim Netzer Andreas Thom Received: 14 December 2012 / Revised: 8 January 2014
Discrete Comput Geom (2014) 51:802 814 DOI 10.1007/s00454-014-9598-1 Hyperbolic Polynomials and Generalized Clifford Algebras Tim Netzer Andreas Thom Received: 14 December 2012 / Revised: 8 January 2014
Minimum Ellipsoid Bounds for Solutions of Polynomial Systems via Sum of Squares
 Journal of Global Optimization (2005) 33: 511 525 Springer 2005 DOI 10.1007/s10898-005-2099-2 Minimum Ellipsoid Bounds for Solutions of Polynomial Systems via Sum of Squares JIAWANG NIE 1 and JAMES W.
Journal of Global Optimization (2005) 33: 511 525 Springer 2005 DOI 10.1007/s10898-005-2099-2 Minimum Ellipsoid Bounds for Solutions of Polynomial Systems via Sum of Squares JIAWANG NIE 1 and JAMES W.
MTNS Conference, Polynomial Inequalities and Applications. Kyoto, July
 MTNS Conference, Polynomial Inequalities and Applications. Kyoto, July 24-28 2006. July 20, 2006 Salma Kuhlmann 1, Research Center Algebra, Logic and Computation University of Saskatchewan, McLean Hall,
MTNS Conference, Polynomial Inequalities and Applications. Kyoto, July 24-28 2006. July 20, 2006 Salma Kuhlmann 1, Research Center Algebra, Logic and Computation University of Saskatchewan, McLean Hall,
HYPERBOLIC POLYNOMIALS, INTERLACERS AND SUMS OF SQUARES
 HYPERBOLIC POLYNOMIALS, INTERLACERS AND SUMS OF SQUARES DANIEL PLAUMANN Universität Konstanz joint work with Mario Kummer (U. Konstanz) Cynthia Vinzant (U. of Michigan) Out[121]= POLYNOMIAL OPTIMISATION
HYPERBOLIC POLYNOMIALS, INTERLACERS AND SUMS OF SQUARES DANIEL PLAUMANN Universität Konstanz joint work with Mario Kummer (U. Konstanz) Cynthia Vinzant (U. of Michigan) Out[121]= POLYNOMIAL OPTIMISATION
Convex algebraic geometry, optimization and applications
 Convex algebraic geometry, optimization and applications organized by William Helton and Jiawang Nie Workshop Summary We start with a little bit of terminology. A linear pencil is a function L : R g d
Convex algebraic geometry, optimization and applications organized by William Helton and Jiawang Nie Workshop Summary We start with a little bit of terminology. A linear pencil is a function L : R g d
Hilbert s 17th Problem to Semidefinite Programming & Convex Algebraic Geometry
 Hilbert s 17th Problem to Semidefinite Programming & Convex Algebraic Geometry Rekha R. Thomas University of Washington, Seattle References Monique Laurent, Sums of squares, moment matrices and optimization
Hilbert s 17th Problem to Semidefinite Programming & Convex Algebraic Geometry Rekha R. Thomas University of Washington, Seattle References Monique Laurent, Sums of squares, moment matrices and optimization
Semidefinite Representation of Convex Sets
 Mathematical Programming manuscript No. (will be inserted by the editor J. William Helton Jiawang Nie Semidefinite Representation of Convex Sets the date of receipt and acceptance should be inserted later
Mathematical Programming manuscript No. (will be inserted by the editor J. William Helton Jiawang Nie Semidefinite Representation of Convex Sets the date of receipt and acceptance should be inserted later
Rational Sums of Squares and Applications
 f ΣR[X] 2 " f ΣQ[X] 2 Rational Sums of Squares and Applications Christopher Hillar (MSRI & Berkeley) A 2008 study found that adding a picture of a brain scan to a scientific argument about human nature
f ΣR[X] 2 " f ΣQ[X] 2 Rational Sums of Squares and Applications Christopher Hillar (MSRI & Berkeley) A 2008 study found that adding a picture of a brain scan to a scientific argument about human nature
Semidefinite programming and convex algebraic geometry
 FoCM 2008 - SDP and convex AG p. 1/40 Semidefinite programming and convex algebraic geometry Pablo A. Parrilo www.mit.edu/~parrilo Laboratory for Information and Decision Systems Electrical Engineering
FoCM 2008 - SDP and convex AG p. 1/40 Semidefinite programming and convex algebraic geometry Pablo A. Parrilo www.mit.edu/~parrilo Laboratory for Information and Decision Systems Electrical Engineering
A = 3 1. We conclude that the algebraic multiplicity of the eigenvalues are both one, that is,
 65 Diagonalizable Matrices It is useful to introduce few more concepts, that are common in the literature Definition 65 The characteristic polynomial of an n n matrix A is the function p(λ) det(a λi) Example
65 Diagonalizable Matrices It is useful to introduce few more concepts, that are common in the literature Definition 65 The characteristic polynomial of an n n matrix A is the function p(λ) det(a λi) Example
(Uniform) determinantal representations
 determinantal representations") 1 (Uniform) determinantal representations Jan Draisma Universität Bern October 216, Kolloquium Bern Determinantal representations 2 R := C[x 1,..., x n ] and R d := {p R deg p d} Definition A determinantal
1 (Uniform) determinantal representations Jan Draisma Universität Bern October 216, Kolloquium Bern Determinantal representations 2 R := C[x 1,..., x n ] and R d := {p R deg p d} Definition A determinantal
CONVEXITY IN SEMI-ALGEBRAIC GEOMETRY AND POLYNOMIAL OPTIMIZATION
 CONVEXITY IN SEMI-ALGEBRAIC GEOMETRY AND POLYNOMIAL OPTIMIZATION JEAN B. LASSERRE Abstract. We review several (and provide new) results on the theory of moments, sums of squares and basic semi-algebraic
CONVEXITY IN SEMI-ALGEBRAIC GEOMETRY AND POLYNOMIAL OPTIMIZATION JEAN B. LASSERRE Abstract. We review several (and provide new) results on the theory of moments, sums of squares and basic semi-algebraic
arxiv:math/ v1 [math.oc] 11 Jun 2003
![arxiv:math/ v1 [math.oc] 11 Jun 2003](/thumbs/81/82939522.jpg "arxiv:math/ v1 [math.oc] 11 Jun 2003") February 1, 2008 arxiv:math/0306180v1 [math.oc] 11 Jun 2003 LINEAR MATRIX INEQUALITY REPRESENTATION OF SETS J. William Helton and Victor Vinnikov Mathematics Dept. UCSD Ben Gurion Univ. of the Negev La
February 1, 2008 arxiv:math/0306180v1 [math.oc] 11 Jun 2003 LINEAR MATRIX INEQUALITY REPRESENTATION OF SETS J. William Helton and Victor Vinnikov Mathematics Dept. UCSD Ben Gurion Univ. of the Negev La
A NICHTNEGATIVSTELLENSATZ FOR POLYNOMIALS IN NONCOMMUTING VARIABLES
 A NICHTNEGATIVSTELLENSATZ FOR POLYNOMIALS IN NONCOMMUTING VARIABLES IGOR KLEP AND MARKUS SCHWEIGHOFER Abstract. Let S {f} be a set of symmetric polynomials in noncommuting variables. If f satisfies a polynomial
A NICHTNEGATIVSTELLENSATZ FOR POLYNOMIALS IN NONCOMMUTING VARIABLES IGOR KLEP AND MARKUS SCHWEIGHOFER Abstract. Let S {f} be a set of symmetric polynomials in noncommuting variables. If f satisfies a polynomial
Lecture 1. 1 Conic programming. MA 796S: Convex Optimization and Interior Point Methods October 8, Consider the conic program. min.
 MA 796S: Convex Optimization and Interior Point Methods October 8, 2007 Lecture 1 Lecturer: Kartik Sivaramakrishnan Scribe: Kartik Sivaramakrishnan 1 Conic programming Consider the conic program min s.t.
MA 796S: Convex Optimization and Interior Point Methods October 8, 2007 Lecture 1 Lecturer: Kartik Sivaramakrishnan Scribe: Kartik Sivaramakrishnan 1 Conic programming Consider the conic program min s.t.
4. Algebra and Duality
 4-1 Algebra and Duality P. Parrilo and S. Lall, CDC 2003 2003.12.07.01 4. Algebra and Duality Example: non-convex polynomial optimization Weak duality and duality gap The dual is not intrinsic The cone
4-1 Algebra and Duality P. Parrilo and S. Lall, CDC 2003 2003.12.07.01 4. Algebra and Duality Example: non-convex polynomial optimization Weak duality and duality gap The dual is not intrinsic The cone
CONTAINMENT PROBLEMS FOR POLYTOPES AND SPECTRAHEDRA
 CONTAINMENT PROBLEMS FOR POLYTOPES AND SPECTRAHEDRA KAI KELLNER, THORSTEN THEOBALD, AND CHRISTIAN TRABANDT Abstract. We study the computational question whether a given polytope or spectrahedron S A (as
CONTAINMENT PROBLEMS FOR POLYTOPES AND SPECTRAHEDRA KAI KELLNER, THORSTEN THEOBALD, AND CHRISTIAN TRABANDT Abstract. We study the computational question whether a given polytope or spectrahedron S A (as
Convergence rates of moment-sum-of-squares hierarchies for volume approximation of semialgebraic sets
 Convergence rates of moment-sum-of-squares hierarchies for volume approximation of semialgebraic sets Milan Korda 1, Didier Henrion,3,4 Draft of December 1, 016 Abstract Moment-sum-of-squares hierarchies
Convergence rates of moment-sum-of-squares hierarchies for volume approximation of semialgebraic sets Milan Korda 1, Didier Henrion,3,4 Draft of December 1, 016 Abstract Moment-sum-of-squares hierarchies
The moment-lp and moment-sos approaches
 The moment-lp and moment-sos approaches LAAS-CNRS and Institute of Mathematics, Toulouse, France CIRM, November 2013 Semidefinite Programming Why polynomial optimization? LP- and SDP- CERTIFICATES of POSITIVITY
The moment-lp and moment-sos approaches LAAS-CNRS and Institute of Mathematics, Toulouse, France CIRM, November 2013 Semidefinite Programming Why polynomial optimization? LP- and SDP- CERTIFICATES of POSITIVITY
1 Directional Derivatives and Differentiability
 Wednesday, January 18, 2012 1 Directional Derivatives and Differentiability Let E R N, let f : E R and let x 0 E. Given a direction v R N, let L be the line through x 0 in the direction v, that is, L :=
Wednesday, January 18, 2012 1 Directional Derivatives and Differentiability Let E R N, let f : E R and let x 0 E. Given a direction v R N, let L be the line through x 0 in the direction v, that is, L :=
January 24, 2003 A NON-COMMUTATIVE POSITIVSTELLENSATZ ON ISOMETRIES
 January 24, 2003 A NON-COMMUTATIVE POSITIVSTELLENSATZ ON ISOMETRIES JOHN W. HELTON, SCOTT MC CULLOUGH, MIHAI PUTINAR Abstract. A symmetric non-commutative polynomial p when evaluated at a tuple of operators
January 24, 2003 A NON-COMMUTATIVE POSITIVSTELLENSATZ ON ISOMETRIES JOHN W. HELTON, SCOTT MC CULLOUGH, MIHAI PUTINAR Abstract. A symmetric non-commutative polynomial p when evaluated at a tuple of operators
Symbolic computation in hyperbolic programming
 Symbolic computation in hyperbolic programming Simone Naldi and Daniel Plaumann MEGA 2017 Nice, 14 June 2017 1 Polyhedra P = {x R n : i, l i (x) 0} Finite # linear inequalities : l i (x) 0, i = 1,...,
Symbolic computation in hyperbolic programming Simone Naldi and Daniel Plaumann MEGA 2017 Nice, 14 June 2017 1 Polyhedra P = {x R n : i, l i (x) 0} Finite # linear inequalities : l i (x) 0, i = 1,...,
Minimizing Cubic and Homogeneous Polynomials over Integers in the Plane
 Minimizing Cubic and Homogeneous Polynomials over Integers in the Plane Alberto Del Pia Department of Industrial and Systems Engineering & Wisconsin Institutes for Discovery, University of Wisconsin-Madison
Minimizing Cubic and Homogeneous Polynomials over Integers in the Plane Alberto Del Pia Department of Industrial and Systems Engineering & Wisconsin Institutes for Discovery, University of Wisconsin-Madison
Optimization over Polynomials with Sums of Squares and Moment Matrices
 Optimization over Polynomials with Sums of Squares and Moment Matrices Monique Laurent Centrum Wiskunde & Informatica (CWI), Amsterdam and University of Tilburg Positivity, Valuations and Quadratic Forms
Optimization over Polynomials with Sums of Squares and Moment Matrices Monique Laurent Centrum Wiskunde & Informatica (CWI), Amsterdam and University of Tilburg Positivity, Valuations and Quadratic Forms
9. Birational Maps and Blowing Up
 72 Andreas Gathmann 9. Birational Maps and Blowing Up In the course of this class we have already seen many examples of varieties that are almost the same in the sense that they contain isomorphic dense
72 Andreas Gathmann 9. Birational Maps and Blowing Up In the course of this class we have already seen many examples of varieties that are almost the same in the sense that they contain isomorphic dense
Nonlinear Programming Models
 Nonlinear Programming Models Fabio Schoen 2008 http://gol.dsi.unifi.it/users/schoen Nonlinear Programming Models p. Introduction Nonlinear Programming Models p. NLP problems minf(x) x S R n Standard form:
Nonlinear Programming Models Fabio Schoen 2008 http://gol.dsi.unifi.it/users/schoen Nonlinear Programming Models p. Introduction Nonlinear Programming Models p. NLP problems minf(x) x S R n Standard form:
ALGEBRAIC DEGREE OF POLYNOMIAL OPTIMIZATION. 1. Introduction. f 0 (x)
") ALGEBRAIC DEGREE OF POLYNOMIAL OPTIMIZATION JIAWANG NIE AND KRISTIAN RANESTAD Abstract. Consider the polynomial optimization problem whose objective and constraints are all described by multivariate polynomials.
ALGEBRAIC DEGREE OF POLYNOMIAL OPTIMIZATION JIAWANG NIE AND KRISTIAN RANESTAD Abstract. Consider the polynomial optimization problem whose objective and constraints are all described by multivariate polynomials.
Example: feasibility. Interpretation as formal proof. Example: linear inequalities and Farkas lemma
 4-1 Algebra and Duality P. Parrilo and S. Lall 2006.06.07.01 4. Algebra and Duality Example: non-convex polynomial optimization Weak duality and duality gap The dual is not intrinsic The cone of valid
4-1 Algebra and Duality P. Parrilo and S. Lall 2006.06.07.01 4. Algebra and Duality Example: non-convex polynomial optimization Weak duality and duality gap The dual is not intrinsic The cone of valid
Chapter 1. Preliminaries
 Introduction This dissertation is a reading of chapter 4 in part I of the book : Integer and Combinatorial Optimization by George L. Nemhauser & Laurence A. Wolsey. The chapter elaborates links between
Introduction This dissertation is a reading of chapter 4 in part I of the book : Integer and Combinatorial Optimization by George L. Nemhauser & Laurence A. Wolsey. The chapter elaborates links between
d + x u1 y v p 1 (x, y) = det
 = det") SEMIDEFINITE REPRESENTATION OF THE K-ELLIPSE JIAWANG NIE, PABLO A. PARRILO, AND BERND STURMFELS Abstract. The k-ellipse is the plane algebraic curve consisting of all points whose sum of distances from
SEMIDEFINITE REPRESENTATION OF THE K-ELLIPSE JIAWANG NIE, PABLO A. PARRILO, AND BERND STURMFELS Abstract. The k-ellipse is the plane algebraic curve consisting of all points whose sum of distances from
On mixed-integer sets with two integer variables
 On mixed-integer sets with two integer variables Sanjeeb Dash IBM Research sanjeebd@us.ibm.com Santanu S. Dey Georgia Inst. Tech. santanu.dey@isye.gatech.edu September 8, 2010 Oktay Günlük IBM Research
On mixed-integer sets with two integer variables Sanjeeb Dash IBM Research sanjeebd@us.ibm.com Santanu S. Dey Georgia Inst. Tech. santanu.dey@isye.gatech.edu September 8, 2010 Oktay Günlük IBM Research
Semidefinite Representation of the k-ellipse
 arxiv:math/0702005v1 [math.ag] 31 Jan 2007 Semidefinite Representation of the k-ellipse Jiawang Nie Pablo A. Parrilo Bernd Sturmfels February 2, 2008 Abstract The k-ellipse is the plane algebraic curve
arxiv:math/0702005v1 [math.ag] 31 Jan 2007 Semidefinite Representation of the k-ellipse Jiawang Nie Pablo A. Parrilo Bernd Sturmfels February 2, 2008 Abstract The k-ellipse is the plane algebraic curve
Convex Functions and Optimization
 Chapter 5 Convex Functions and Optimization 5.1 Convex Functions Our next topic is that of convex functions. Again, we will concentrate on the context of a map f : R n R although the situation can be generalized
Chapter 5 Convex Functions and Optimization 5.1 Convex Functions Our next topic is that of convex functions. Again, we will concentrate on the context of a map f : R n R although the situation can be generalized
SPECTRA - a Maple library for solving linear matrix inequalities in exact arithmetic
 SPECTRA - a Maple library for solving linear matrix inequalities in exact arithmetic Didier Henrion Simone Naldi Mohab Safey El Din Version 1.0 of November 5, 2016 Abstract This document briefly describes
SPECTRA - a Maple library for solving linear matrix inequalities in exact arithmetic Didier Henrion Simone Naldi Mohab Safey El Din Version 1.0 of November 5, 2016 Abstract This document briefly describes
Announcements Wednesday, November 01
 Announcements Wednesday, November 01 WeBWorK 3.1, 3.2 are due today at 11:59pm. The quiz on Friday covers 3.1, 3.2. My office is Skiles 244. Rabinoffice hours are Monday, 1 3pm and Tuesday, 9 11am. Section
Announcements Wednesday, November 01 WeBWorK 3.1, 3.2 are due today at 11:59pm. The quiz on Friday covers 3.1, 3.2. My office is Skiles 244. Rabinoffice hours are Monday, 1 3pm and Tuesday, 9 11am. Section
Course 311: Michaelmas Term 2005 Part III: Topics in Commutative Algebra
 Course 311: Michaelmas Term 2005 Part III: Topics in Commutative Algebra D. R. Wilkins Contents 3 Topics in Commutative Algebra 2 3.1 Rings and Fields......................... 2 3.2 Ideals...............................
Course 311: Michaelmas Term 2005 Part III: Topics in Commutative Algebra D. R. Wilkins Contents 3 Topics in Commutative Algebra 2 3.1 Rings and Fields......................... 2 3.2 Ideals...............................
The Algebraic Degree of Semidefinite Programming
 The Algebraic Degree ofsemidefinite Programming p. The Algebraic Degree of Semidefinite Programming BERND STURMFELS UNIVERSITY OF CALIFORNIA, BERKELEY joint work with and Jiawang Nie (IMA Minneapolis)
The Algebraic Degree ofsemidefinite Programming p. The Algebraic Degree of Semidefinite Programming BERND STURMFELS UNIVERSITY OF CALIFORNIA, BERKELEY joint work with and Jiawang Nie (IMA Minneapolis)
LIFTS OF CONVEX SETS AND CONE FACTORIZATIONS JOÃO GOUVEIA, PABLO A. PARRILO, AND REKHA THOMAS
 LIFTS OF CONVEX SETS AND CONE FACTORIZATIONS Abstract. In this paper we address the basic geometric question of when a given convex set is the image under a linear map of an affine slice of a given closed
LIFTS OF CONVEX SETS AND CONE FACTORIZATIONS Abstract. In this paper we address the basic geometric question of when a given convex set is the image under a linear map of an affine slice of a given closed
Some notes on Coxeter groups
 Some notes on Coxeter groups Brooks Roberts November 28, 2017 CONTENTS 1 Contents 1 Sources 2 2 Reflections 3 3 The orthogonal group 7 4 Finite subgroups in two dimensions 9 5 Finite subgroups in three
Some notes on Coxeter groups Brooks Roberts November 28, 2017 CONTENTS 1 Contents 1 Sources 2 2 Reflections 3 3 The orthogonal group 7 4 Finite subgroups in two dimensions 9 5 Finite subgroups in three
Topological properties
 CHAPTER 4 Topological properties 1. Connectedness Definitions and examples Basic properties Connected components Connected versus path connected, again 2. Compactness Definition and first examples Topological
CHAPTER 4 Topological properties 1. Connectedness Definitions and examples Basic properties Connected components Connected versus path connected, again 2. Compactness Definition and first examples Topological
Lecture Note 5: Semidefinite Programming for Stability Analysis
 ECE7850: Hybrid Systems:Theory and Applications Lecture Note 5: Semidefinite Programming for Stability Analysis Wei Zhang Assistant Professor Department of Electrical and Computer Engineering Ohio State
ECE7850: Hybrid Systems:Theory and Applications Lecture Note 5: Semidefinite Programming for Stability Analysis Wei Zhang Assistant Professor Department of Electrical and Computer Engineering Ohio State
Assignment 1: From the Definition of Convexity to Helley Theorem
 Assignment 1: From the Definition of Convexity to Helley Theorem Exercise 1 Mark in the following list the sets which are convex: 1. {x R 2 : x 1 + i 2 x 2 1, i = 1,..., 10} 2. {x R 2 : x 2 1 + 2ix 1x
Assignment 1: From the Definition of Convexity to Helley Theorem Exercise 1 Mark in the following list the sets which are convex: 1. {x R 2 : x 1 + i 2 x 2 1, i = 1,..., 10} 2. {x R 2 : x 2 1 + 2ix 1x
Exact algorithms for linear matrix inequalities
 0 / 12 Exact algorithms for linear matrix inequalities Mohab Safey El Din (UPMC/CNRS/IUF/INRIA PolSys Team) Joint work with Didier Henrion, CNRS LAAS (Toulouse) Simone Naldi, Technische Universität Dortmund
0 / 12 Exact algorithms for linear matrix inequalities Mohab Safey El Din (UPMC/CNRS/IUF/INRIA PolSys Team) Joint work with Didier Henrion, CNRS LAAS (Toulouse) Simone Naldi, Technische Universität Dortmund
In English, this means that if we travel on a straight line between any two points in C, then we never leave C.
 Convex sets In this section, we will be introduced to some of the mathematical fundamentals of convex sets. In order to motivate some of the definitions, we will look at the closest point problem from
Convex sets In this section, we will be introduced to some of the mathematical fundamentals of convex sets. In order to motivate some of the definitions, we will look at the closest point problem from
An explicit construction of distinguished representations of polynomials nonnegative over finite sets
 An explicit construction of distinguished representations of polynomials nonnegative over finite sets Pablo A. Parrilo Automatic Control Laboratory Swiss Federal Institute of Technology Physikstrasse 3
An explicit construction of distinguished representations of polynomials nonnegative over finite sets Pablo A. Parrilo Automatic Control Laboratory Swiss Federal Institute of Technology Physikstrasse 3
MORE EXERCISES FOR SECTIONS II.1 AND II.2. There are drawings on the next two pages to accompany the starred ( ) exercises.
 exercises.") Math 133 Winter 2013 MORE EXERCISES FOR SECTIONS II.1 AND II.2 There are drawings on the next two pages to accompany the starred ( ) exercises. B1. Let L be a line in R 3, and let x be a point which does
Math 133 Winter 2013 MORE EXERCISES FOR SECTIONS II.1 AND II.2 There are drawings on the next two pages to accompany the starred ( ) exercises. B1. Let L be a line in R 3, and let x be a point which does
Lecture 5. Theorems of Alternatives and Self-Dual Embedding
 IE 8534 1 Lecture 5. Theorems of Alternatives and Self-Dual Embedding IE 8534 2 A system of linear equations may not have a solution. It is well known that either Ax = c has a solution, or A T y = 0, c
IE 8534 1 Lecture 5. Theorems of Alternatives and Self-Dual Embedding IE 8534 2 A system of linear equations may not have a solution. It is well known that either Ax = c has a solution, or A T y = 0, c
Unless otherwise specified, V denotes an arbitrary finite-dimensional vector space.
 MAT 90 // 0 points Exam Solutions Unless otherwise specified, V denotes an arbitrary finite-dimensional vector space..(0) Prove: a central arrangement A in V is essential if and only if the dual projective
MAT 90 // 0 points Exam Solutions Unless otherwise specified, V denotes an arbitrary finite-dimensional vector space..(0) Prove: a central arrangement A in V is essential if and only if the dual projective
Math 341: Convex Geometry. Xi Chen
 Math 341: Convex Geometry Xi Chen 479 Central Academic Building, University of Alberta, Edmonton, Alberta T6G 2G1, CANADA E-mail address: xichen@math.ualberta.ca CHAPTER 1 Basics 1. Euclidean Geometry
Math 341: Convex Geometry Xi Chen 479 Central Academic Building, University of Alberta, Edmonton, Alberta T6G 2G1, CANADA E-mail address: xichen@math.ualberta.ca CHAPTER 1 Basics 1. Euclidean Geometry
Convex algebraic geometry, optimization and applications
 Convex algebraic geometry, optimization and applications The American Institute of Mathematics The following compilation of participant contributions is only intended as a lead-in to the AIM workshop Convex
Convex algebraic geometry, optimization and applications The American Institute of Mathematics The following compilation of participant contributions is only intended as a lead-in to the AIM workshop Convex
Croatian Operational Research Review (CRORR), Vol. 3, 2012
, Vol. 3, 2012") 126 127 128 129 130 131 132 133 REFERENCES [BM03] S. Burer and R.D.C. Monteiro (2003), A nonlinear programming algorithm for solving semidefinite programs via low-rank factorization, Mathematical Programming
126 127 128 129 130 131 132 133 REFERENCES [BM03] S. Burer and R.D.C. Monteiro (2003), A nonlinear programming algorithm for solving semidefinite programs via low-rank factorization, Mathematical Programming
arxiv:math/ v2 [math.oc] 25 May 2004
![arxiv:math/ v2 [math.oc] 25 May 2004](/thumbs/79/79529810.jpg "arxiv:math/ v2 [math.oc] 25 May 2004") arxiv:math/0304104v2 [math.oc] 25 May 2004 THE LAX CONJECTURE IS TRUE A.S. Lewis, P.A. Parrilo, and M.V. Ramana Key words: hyperbolic polynomial, Lax conjecture, hyperbolicity cone, semidefinite representable
arxiv:math/0304104v2 [math.oc] 25 May 2004 THE LAX CONJECTURE IS TRUE A.S. Lewis, P.A. Parrilo, and M.V. Ramana Key words: hyperbolic polynomial, Lax conjecture, hyperbolicity cone, semidefinite representable
A brief history of noncommutative Positivstellensätze. Jaka Cimprič, University of Ljubljana, Slovenia
 A brief history of noncommutative Positivstellensätze Jaka Cimprič, University of Ljubljana, Slovenia Hilbert s Nullstellensatz: If f, g 1,..., g m R := C[X 1,..., X n ] then the following are equivalent:
A brief history of noncommutative Positivstellensätze Jaka Cimprič, University of Ljubljana, Slovenia Hilbert s Nullstellensatz: If f, g 1,..., g m R := C[X 1,..., X n ] then the following are equivalent:
Semidefinite Programming Basics and Applications
 Semidefinite Programming Basics and Applications Ray Pörn, principal lecturer Åbo Akademi University Novia University of Applied Sciences Content What is semidefinite programming (SDP)? How to represent
Semidefinite Programming Basics and Applications Ray Pörn, principal lecturer Åbo Akademi University Novia University of Applied Sciences Content What is semidefinite programming (SDP)? How to represent
IE 521 Convex Optimization
 Lecture 1: 16th January 2019 Outline 1 / 20 Which set is different from others? Figure: Four sets 2 / 20 Which set is different from others? Figure: Four sets 3 / 20 Interior, Closure, Boundary Definition.
Lecture 1: 16th January 2019 Outline 1 / 20 Which set is different from others? Figure: Four sets 2 / 20 Which set is different from others? Figure: Four sets 3 / 20 Interior, Closure, Boundary Definition.
Lecture 1: Entropy, convexity, and matrix scaling CSE 599S: Entropy optimality, Winter 2016 Instructor: James R. Lee Last updated: January 24, 2016
 Lecture 1: Entropy, convexity, and matrix scaling CSE 599S: Entropy optimality, Winter 2016 Instructor: James R. Lee Last updated: January 24, 2016 1 Entropy Since this course is about entropy maximization,
Lecture 1: Entropy, convexity, and matrix scaling CSE 599S: Entropy optimality, Winter 2016 Instructor: James R. Lee Last updated: January 24, 2016 1 Entropy Since this course is about entropy maximization,
CLOSURES OF QUADRATIC MODULES
 CLOSURES OF QUADRATIC MODULES JAKA CIMPRIČ, MURRAY MARSHALL, TIM NETZER Abstract. We consider the problem of determining the closure M of a quadratic module M in a commutative R-algebra with respect to
CLOSURES OF QUADRATIC MODULES JAKA CIMPRIČ, MURRAY MARSHALL, TIM NETZER Abstract. We consider the problem of determining the closure M of a quadratic module M in a commutative R-algebra with respect to
Chapter 2: Linear Independence and Bases
 MATH20300: Linear Algebra 2 (2016 Chapter 2: Linear Independence and Bases 1 Linear Combinations and Spans Example 11 Consider the vector v (1, 1 R 2 What is the smallest subspace of (the real vector space
MATH20300: Linear Algebra 2 (2016 Chapter 2: Linear Independence and Bases 1 Linear Combinations and Spans Example 11 Consider the vector v (1, 1 R 2 What is the smallest subspace of (the real vector space
π X : X Y X and π Y : X Y Y
 Math 6130 Notes. Fall 2002. 6. Hausdorffness and Compactness. We would like to be able to say that all quasi-projective varieties are Hausdorff and that projective varieties are the only compact varieties.
Math 6130 Notes. Fall 2002. 6. Hausdorffness and Compactness. We would like to be able to say that all quasi-projective varieties are Hausdorff and that projective varieties are the only compact varieties.
Convex Sets with Applications to Economics
 Convex Sets with Applications to Economics Debasis Mishra March 10, 2010 1 Convex Sets A set C R n is called convex if for all x, y C, we have λx+(1 λ)y C for all λ [0, 1]. The definition says that for
Convex Sets with Applications to Economics Debasis Mishra March 10, 2010 1 Convex Sets A set C R n is called convex if for all x, y C, we have λx+(1 λ)y C for all λ [0, 1]. The definition says that for
A Simple Derivation of a Facial Reduction Algorithm and Extended Dual Systems
 A Simple Derivation of a Facial Reduction Algorithm and Extended Dual Systems Gábor Pataki gabor@unc.edu Dept. of Statistics and OR University of North Carolina at Chapel Hill Abstract The Facial Reduction
A Simple Derivation of a Facial Reduction Algorithm and Extended Dual Systems Gábor Pataki gabor@unc.edu Dept. of Statistics and OR University of North Carolina at Chapel Hill Abstract The Facial Reduction
A new look at nonnegativity on closed sets
 A new look at nonnegativity on closed sets LAAS-CNRS and Institute of Mathematics, Toulouse, France IPAM, UCLA September 2010 Positivstellensatze for semi-algebraic sets K R n from the knowledge of defining
A new look at nonnegativity on closed sets LAAS-CNRS and Institute of Mathematics, Toulouse, France IPAM, UCLA September 2010 Positivstellensatze for semi-algebraic sets K R n from the knowledge of defining
EXTENDING THE ARCHIMEDEAN POSITIVSTELLENSATZ TO THE NON-COMPACT CASE M. Marshall Abstract. A generalization of Schmudgen's Positivstellensatz is given
 EXTENDING THE ARCHIMEDEAN POSITIVSTELLENSATZ TO THE NON-COMPACT CASE M. Marshall Abstract. A generalization o Schmudgen's Positivstellensatz is given which holds or any basic closed semialgebraic set in
EXTENDING THE ARCHIMEDEAN POSITIVSTELLENSATZ TO THE NON-COMPACT CASE M. Marshall Abstract. A generalization o Schmudgen's Positivstellensatz is given which holds or any basic closed semialgebraic set in
HYPERBOLIC PROGRAMS, AND THEIR DERIVATIVE RELAXATIONS
 HYPERBOLIC PROGRAMS, AND THEIR DERIVATIVE RELAXATIONS JAMES RENEGAR Abstract. We study the algebraic and facial structures of hyperbolic programs, and examine natural relaxations of hyperbolic programs,
HYPERBOLIC PROGRAMS, AND THEIR DERIVATIVE RELAXATIONS JAMES RENEGAR Abstract. We study the algebraic and facial structures of hyperbolic programs, and examine natural relaxations of hyperbolic programs,
Lifts of Convex Sets and Cone Factorizations
 Lifts of Convex Sets and Cone Factorizations The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published Publisher Gouveia,
Lifts of Convex Sets and Cone Factorizations The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published Publisher Gouveia,
What can be expressed via Conic Quadratic and Semidefinite Programming?
 What can be expressed via Conic Quadratic and Semidefinite Programming? A. Nemirovski Faculty of Industrial Engineering and Management Technion Israel Institute of Technology Abstract Tremendous recent
What can be expressed via Conic Quadratic and Semidefinite Programming? A. Nemirovski Faculty of Industrial Engineering and Management Technion Israel Institute of Technology Abstract Tremendous recent
Math Linear Algebra II. 1. Inner Products and Norms
 Math 342 - Linear Algebra II Notes 1. Inner Products and Norms One knows from a basic introduction to vectors in R n Math 254 at OSU) that the length of a vector x = x 1 x 2... x n ) T R n, denoted x,
Math 342 - Linear Algebra II Notes 1. Inner Products and Norms One knows from a basic introduction to vectors in R n Math 254 at OSU) that the length of a vector x = x 1 x 2... x n ) T R n, denoted x,
Announcements Wednesday, November 01
 Announcements Wednesday, November 01 WeBWorK 3.1, 3.2 are due today at 11:59pm. The quiz on Friday covers 3.1, 3.2. My office is Skiles 244. Rabinoffice hours are Monday, 1 3pm and Tuesday, 9 11am. Section
Announcements Wednesday, November 01 WeBWorK 3.1, 3.2 are due today at 11:59pm. The quiz on Friday covers 3.1, 3.2. My office is Skiles 244. Rabinoffice hours are Monday, 1 3pm and Tuesday, 9 11am. Section
Linear Systems. Math A Bianca Santoro. September 23, 2016
 Linear Systems Math A4600 - Bianca Santoro September 3, 06 Goal: Understand how to solve Ax = b. Toy Model: Let s study the following system There are two nice ways of thinking about this system: x + y
Linear Systems Math A4600 - Bianca Santoro September 3, 06 Goal: Understand how to solve Ax = b. Toy Model: Let s study the following system There are two nice ways of thinking about this system: x + y
Linear Matrix Inequalities vs Convex Sets
 Linear Matrix Inequalities vs Convex Sets with admiration and friendship for Eduardo Harry Dym Math Dept Weitzman Inst. Damon Hay Math Dept Florida Texas Igor Klep Math Dept Everywhere in Solvenia Scott
Linear Matrix Inequalities vs Convex Sets with admiration and friendship for Eduardo Harry Dym Math Dept Weitzman Inst. Damon Hay Math Dept Florida Texas Igor Klep Math Dept Everywhere in Solvenia Scott
Discrete Math, Second Problem Set (June 24)
") Discrete Math, Second Problem Set (June 24) REU 2003 Instructor: Laszlo Babai Scribe: D Jeremy Copeland 1 Number Theory Remark 11 For an arithmetic progression, a 0, a 1 = a 0 +d, a 2 = a 0 +2d, to have
Discrete Math, Second Problem Set (June 24) REU 2003 Instructor: Laszlo Babai Scribe: D Jeremy Copeland 1 Number Theory Remark 11 For an arithmetic progression, a 0, a 1 = a 0 +d, a 2 = a 0 +2d, to have
CLOSURES OF QUADRATIC MODULES
 CLOSURES OF QUADRATIC MODULES JAKA CIMPRIČ, MURRAY MARSHALL, TIM NETZER Abstract. We consider the problem of determining the closure M of a quadratic module M in a commutative R-algebra with respect to
CLOSURES OF QUADRATIC MODULES JAKA CIMPRIČ, MURRAY MARSHALL, TIM NETZER Abstract. We consider the problem of determining the closure M of a quadratic module M in a commutative R-algebra with respect to
Geometric problems. Chapter Projection on a set. The distance of a point x 0 R n to a closed set C R n, in the norm, is defined as
 Chapter 8 Geometric problems 8.1 Projection on a set The distance of a point x 0 R n to a closed set C R n, in the norm, is defined as dist(x 0,C) = inf{ x 0 x x C}. The infimum here is always achieved.
Chapter 8 Geometric problems 8.1 Projection on a set The distance of a point x 0 R n to a closed set C R n, in the norm, is defined as dist(x 0,C) = inf{ x 0 x x C}. The infimum here is always achieved.
Polynomial-sized semidefinite representations of derivative relaxations of spectrahedral cones
 Polynomial-sized semidefinite representations of derivative relaxations of spectrahedral cones The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story
Polynomial-sized semidefinite representations of derivative relaxations of spectrahedral cones The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story
Integer Programming ISE 418. Lecture 12. Dr. Ted Ralphs
 Integer Programming ISE 418 Lecture 12 Dr. Ted Ralphs ISE 418 Lecture 12 1 Reading for This Lecture Nemhauser and Wolsey Sections II.2.1 Wolsey Chapter 9 ISE 418 Lecture 12 2 Generating Stronger Valid
Integer Programming ISE 418 Lecture 12 Dr. Ted Ralphs ISE 418 Lecture 12 1 Reading for This Lecture Nemhauser and Wolsey Sections II.2.1 Wolsey Chapter 9 ISE 418 Lecture 12 2 Generating Stronger Valid
0.1 Rational Canonical Forms
 We have already seen that it is useful and simpler to study linear systems using matrices. But matrices are themselves cumbersome, as they are stuffed with many entries, and it turns out that it s best
We have already seen that it is useful and simpler to study linear systems using matrices. But matrices are themselves cumbersome, as they are stuffed with many entries, and it turns out that it s best
Solution to Homework 1
 Solution to Homework Sec 2 (a) Yes It is condition (VS 3) (b) No If x, y are both zero vectors Then by condition (VS 3) x = x + y = y (c) No Let e be the zero vector We have e = 2e (d) No It will be false
Solution to Homework Sec 2 (a) Yes It is condition (VS 3) (b) No If x, y are both zero vectors Then by condition (VS 3) x = x + y = y (c) No Let e be the zero vector We have e = 2e (d) No It will be false
Math 309 Notes and Homework for Days 4-6
 Math 309 Notes and Homework for Days 4-6 Day 4 Read Section 1.2 and the notes below. The following is the main definition of the course. Definition. A vector space is a set V (whose elements are called
Math 309 Notes and Homework for Days 4-6 Day 4 Read Section 1.2 and the notes below. The following is the main definition of the course. Definition. A vector space is a set V (whose elements are called
Robust and Optimal Control, Spring 2015
 Robust and Optimal Control, Spring 2015 Instructor: Prof. Masayuki Fujita (S5-303B) G. Sum of Squares (SOS) G.1 SOS Program: SOS/PSD and SDP G.2 Duality, valid ineqalities and Cone G.3 Feasibility/Optimization
Robust and Optimal Control, Spring 2015 Instructor: Prof. Masayuki Fujita (S5-303B) G. Sum of Squares (SOS) G.1 SOS Program: SOS/PSD and SDP G.2 Duality, valid ineqalities and Cone G.3 Feasibility/Optimization
Appendix B Convex analysis
 This version: 28/02/2014 Appendix B Convex analysis In this appendix we review a few basic notions of convexity and related notions that will be important for us at various times. B.1 The Hausdorff distance
This version: 28/02/2014 Appendix B Convex analysis In this appendix we review a few basic notions of convexity and related notions that will be important for us at various times. B.1 The Hausdorff distance
MATH 8253 ALGEBRAIC GEOMETRY WEEK 12
 MATH 8253 ALGEBRAIC GEOMETRY WEEK 2 CİHAN BAHRAN 3.2.. Let Y be a Noetherian scheme. Show that any Y -scheme X of finite type is Noetherian. Moreover, if Y is of finite dimension, then so is X. Write f
MATH 8253 ALGEBRAIC GEOMETRY WEEK 2 CİHAN BAHRAN 3.2.. Let Y be a Noetherian scheme. Show that any Y -scheme X of finite type is Noetherian. Moreover, if Y is of finite dimension, then so is X. Write f
On John type ellipsoids
 On John type ellipsoids B. Klartag Tel Aviv University Abstract Given an arbitrary convex symmetric body K R n, we construct a natural and non-trivial continuous map u K which associates ellipsoids to
On John type ellipsoids B. Klartag Tel Aviv University Abstract Given an arbitrary convex symmetric body K R n, we construct a natural and non-trivial continuous map u K which associates ellipsoids to