Carrier Phase Integer Ambiguity Resolution Recent results and open issues
|
|
|
- Patricia Ward
- 5 years ago
- Views:
Transcription
1 Carrier Phase Integer Ambiguity Resolution Recent results and open issues Sandra Verhagen DEOS, Delft University of Technology, The Netherlands Kolloquium Satellitennavigation, TU München, 9 February 2010 Delft University of Technology Challenge the future
2 Outline Carrier phase ambiguity resolution Background State-of-the-art Performance prospects High-precision applications: examples Carrier phase ambiguity resolution with constraints Background Recent developments and results 2 76
3 3 76 : number of times (= known) fits into ( = unknown integer) A Simple Ambiguity Resolution Example = = = a p D a p E p, 0 0, σ σ ϕ ρ λ ϕ ϕ Model: integer p λ 1 λ 2 λ 3 λ ( 2) a λ ( 1) a λ a ϕ A B ϕ a λ p : measured fraction distance AB ( = 2 mm) σ ϕ : measured distance AB ( = 20 cm) σ p ρ ρ a : unknown distance AB
4 Relative Positioning: Double Differencing elimination of receiver clock errors elimination of initial receiver phase offsets DD phase ambiguity is an integer number! 1 2 DD code observation: Δp T , j = Δp12, j Δp12, j = ( e2 ) Δx12 + μ jδi12, j + ΔT , j x 12 DD phase observation: relative receiver position T , j = Δϕ12, j Δϕ12, j = ( e2 ) Δx12 μ jδi12, j + ΔT12 + λ jδn12, j ε12, j Δϕ + relative receiver position integer DD ambiguity 4 76
5 Resolution of the DD ambiguities code observation: dm precision phase observation: mm precision, but: receiver-satellite geometry has to change considerably (long observation time) to solve position with mm-cm accuracy if DD ambiguities are resolved to integers within a short time (or instantaneously), positions (and other parameters) can be solved with mm-cm accuracy 5 76
6 Precision of relative GPS positioning code observations N E U phase observations float N E U st.dev. [m] 1 st.dev. [m] fixed time [min] two epochs of data: varying time span time [min] 6 76
7 Precision code vs. phase observations code observations phase observations U U E N 1 m E N 0.01 m both RELATIVE positioning phase: provided that the integer ambiguity is KNOWN 7 76
8 Short vs. long baselines DELAY_1 DELAY_2 atmospheric layer short baselines (few km): signals travel through same part of atmosphere differential atmospheric delays neglected x I12 = 0 T12 = 0 beneficial for ambiguity resolution (less parameters) long baselines (> few km): differential atmospheric delays need to be modeled (otherwise: wrong ambiguities and biased position) 8 76
9 Ionosphere-fixed, -float, -weighted model Ionosphere-fixed model: no differential ionospheric delay parameters observations may be corrected a priori for ionosphere for short baselines only can already be based on single-frequency data Ionosphere-float model: parameterization of differential ionospheric delays for long baselines based on at least dual-frequency data Ionosphere-weighted model: Ionosphere corrections from network RTK subtracted for medium to long baselines 9 76
10 GNSS model observation equations: y = Aa+ Bb+ e, a Z n ; Q yy y a b Q yy data vector ambiguities baseline coordinates & other unknowns variance-covariance matrix of data 10 76
11 SUCCESSFUL INTEGER AMBIGUITY RESOLUTION is the key to FAST and PRECISE GNSS parameter estimation (baseline coordinates, attitude angles, orbit parameters, atmospheric delays) 11 76
12 Integer estimation float solution estimate position and carrier ambiguities integer map estimate integer ambiguities fixed solution estimate position (ambiguities fixed) validate float solution validate integer ambiguities 12 76
13 Float and fixed solution Ambiguities not fixed Ambiguities fixed Up (meters) 0.0 Up (meters) North (meters) East (meters) North (meters) East (meters)
 = a Z n no")

14 Integer estimation integer map aˆ R n S( aˆ) = a Z n no holes & no overlap translation invariant ('linearity') 14 76
15 Different choices of integer estimators 2 integer rounding integer bootstrapping integer least-squares after their pull-in region 15 76
16 Ambiguity resolution Integer ambiguities are derived from stochastic observations Integer ambiguities are not deterministic but stochastic input (stochastic) a ( a) S R n Z n = S ˆ : output (stochastic) 16 76
17 Integer estimation Optimal integer estimator: integer least-squares 2 1 a = arg min aˆ z 2 z Z n Q aˆ
 faˆ ( x) dx S a 18")
18 Integer estimation PDF f a ˆ ( x) PMF P( a LS = z) success rate: P ( a = = LS a) faˆ ( x) dx S a 18 76
19 LAMBDA method Integer estimation: optimal : maximum success rate efficient : (near) real-time Applicable to wide variety of models With or without relative satellite-receiver geometry Stationary or moving receivers With or without atmospheric delays Single- or multi-baseline One, two, three or more frequencies (any GNSS) LAMBDA LAMBDA 19 76
20 Ambiguity Resolution Methods Search in the 3-dimensional position space (e.g. ambiguity function method); Now deprecated Linear combination of code and phase (using widelane/narrowlane combinations) performance worse with AS has been improved by LAMBDA: 2-dimensional ambiguity resolution/search problem Geometry-free model Search in the m-dimensional ambiguity space Geometry-based model 20 76
21 Integer validation: ratio test Integer validation:? actually discrimination test: is integer estimate sufficiently more likely than any other integer candidate? in practice: ratio test 21 76
22 a 2 a â 1 ˆ ˆ ˆ ˆ a a Q Q a a a a ˆ ˆ ˆ ˆ a Q a Q a a a a Integer validation: ratio test
23 Integer validation: ratio test Ratio test: aˆ a aˆ a Problem: how to choose μ? Practice: fixed value of e.g. μ = Q 2 Q aˆ aˆ New theory: choose μ based on the condition that: P (failure) β user-defined μ > μ use a use aˆ Note: reciprocal of ratio test used in practice Look-up table to determine μ for a given ILS failure rate and number of ambiguities 23 76
 = undecided rate P (failure) = failure rate < β P (success) = success rate")
24 Integer validation: ratio test white: rejected red: accepted but wrong green: accepted and correct P (float) = undecided rate P (failure) = failure rate < β P (success) = success rate 24 76


25 On the prospects of GPS+Galileo ambiguity resolution GPS/Galileo 25 76

26 Number of satellites during a day at three different locations for GPS, Galileo and GPS+Galileo 26 76
27 Single epoch success-rates 15 km, 30 S, 24 hrs Min&Max (bars),mean ( ) GPS Galileo GPS+Galileo 27 76

,mean ( ) GPS")
28 Single epoch success-rates 30 km, 30 S, 24 hrs Min&Max (bars),mean ( ) GPS Galileo GPS+Galileo 28 76
,mean ( ) GPS Galileo GPS+Galileo 29")
29 Single epoch success-rates 100 km, 30 S, 24 hrs Min&Max (bars),mean ( ) GPS Galileo GPS+Galileo 29 76


30 Single-Frequency, Single-Epoch, 24H Mean Success Rates 1 45 o North 1 75 o North mean success rate mean success rate <5 km 10 km 20 km number of satellites number of satellites 30 76

31 Wide Area RTK Multi-frequency double-differenced phase & code observables Each GNSS has its own reference satellite Unknowns: coordinates + ZTD, DD ambiguities, DD ionosphere No predefined linear combinations of observations formed Ionosphere-weighted: to account for uncertainty in WARTK ionospheric corrections 31 76
32 WARTK performance DUNK 257km σ I = 1cm DELF 413km σ I = 2cm GPS only dual-freq GAL only dual-freq GAL only triple-freq GPS+GAL dual-freq 92.3% 98.0% 98.6% 100% 52.0% 62.1% 83.0% 99.8% 32 76
33 WARTK performance Horizontal Position Errors of DELF GPS ONLY FLT HPE (95%): FIX HPE (95%): HPx [m] epoch [1 sec] Vertical Position Errors of DELF GPS ONLY FLT VPE (95%): FIX VPE (95%): VPx [m] epoch [1 sec] 33 76
34 WARTK performance Horizontal Position Errors of DELF GPS & GAL FLT HPE (95%): FIX HPE (95%): HPx [m] epoch [1 sec] Vertical Position Errors of DELF GPS & GAL FLT VPE (95%): FIX VPE (95%): VPx [m] epoch [1 sec] 34 76
35 Outline Carrier phase ambiguity resolution Background State-of-the-art Outlook on performance High-precision applications: examples Carrier phase ambiguity resolution with constraints Background Recent developments and results 35 76









36 36 76


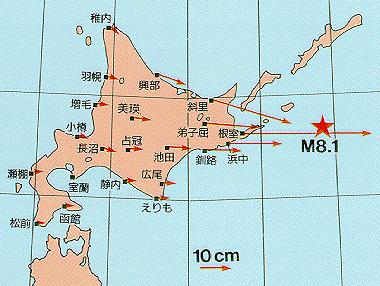
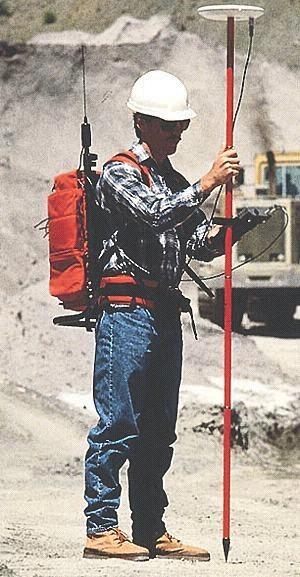
37 Example Machine Guidance 37 76


38 JPALS: Joint Precision Approach and Landing System All weather, all mission, all user landing system, based on DGPS GPS to provide accurate and reliable landing guidance Supports fixed base, tactical and shipboard applications First ever fully automated carrier landing at sea on April 23,


39 Satellite formation flying dual-frequency GPS relative positioning (incl. LAMBDA ambiguity resolution) JPL BlackJack receiver dual frequency GRACE A and B geo-science twin-sat mission NASA-JPL EarthObservatory.nasa.gov 39 76








40 Furuno: Satellite Compass 40 76
41 Outline Carrier phase ambiguity resolution Background State-of-the-art Outlook on performance High-precision applications: examples Carrier phase ambiguity resolution with constraints Background Recent developments and results Open issues 41 76
42 Multivariate Constrained LAMBDA method Based on presentation by G. Giorgi, P.J.G. Teunissen and S. Verhagen at IAG Scientific Assembly, Buenos Aires, 2009 The observation model: functional and stochastic model of the GNSS observables The set of nonlinear geometrical constraints Constrained integer least-squares Numerical and experimental results 42 76
43 Modeling the GNSS observations 2 antennae tracking the same n+1 satellites Double Differences Gauss-Markov model: ( ) ( ) n E y = Az+ Gb ; D y = Q ; z Z, b R y p E(.) D(.) Expectation operator Dispersion operator y Vector of phase and code observables (2n) A Matrix of carrier wavelength (2n n) z Vector of integer phase ambiguities (n) G Matrix of Line-of-sight vectors (2n 3) b Vector of real-valued unknowns (p) Q y Variance-covariance matrix (2n 2n) 43 76
44 Modeling the GNSS observations Multibaseline observations: m+1 antennae Multivariate Gauss-Markov model: 3 ( ) = + ; ( ( )) = ; Z n m, R E Y AZ GB D vec Y Q Z B Y m b m b 1 b 2 [ ] Y = y1, y2,, ym Solvable applying the ILS principle Z = z1, z2,, zm The LAMBDA method [ ] [ ] B= b1, b2,, bm 44 76
45 Fixed frame of antennae Assumption: set of antennae mounted on a rigid platform Introduction of a local frame of reference u 1, u 2, u 3 x3 u3 u2 [ ] B= b1, b2,, bm x2 x1 [ ] F = f1, f2,, fm u
46 Fixed frame of antennae Parameterization of the baseline coordinates via a rotation matrix R x3 u3 u2 [ ] B= b1, b2,, bm f2 =[f21, f22,0] T x2 B = RF x1 f1 =[f11,0,0] T u1 [ ] F = f1, f2,, fm KNOWN 46 76
47 Modeling the constrained set of GNSS observations 3 ( ) = + ; ( ( )) = ; Z n m, E Y AZ GB D vec Y Q Z B Additional constraint: the orthogonality of R ( ) ( ( )) D vec Y E Y = AZ + GRF ; Z Z, R O = Q Y Y m n m 33 Unknowns to be determined: Ambiguity matrix Z, in the class of integer matrices nxm Rotation matrix R, in the class of orthogonal matrices 3x
48 Constrained Integer Least-Squares 33 ( ) ; n m = + Z, O E Y AZ GRF Z R Model in vectorial form: ( ( )) ( ) ( ) vec Z ( ( )) T E vec Y = Im A+ F G ; Z Z, R O vec R D vec Y = Q Y n m
49 Constrained Integer Least-Squares Minimizing the weighted squared norm of the least-squares residuals: min nm Z Z R O 33 vec Y I A vec Z F G vec R = ( ) ( ) ( ) ( T ) ( ) m 2 Q Y Sum of squares decomposition 2 ˆ = E + min vec Z Zˆ vec Rˆ + ( Z) R 2 2 ( ) ( ) n m Y Z ˆ 33 Z Rˆ( Z ) Q Z Q Q R O 49 76
50 Constrained Integer Least-Squares Objective function Z = arg min vec Z Z + min vec R( Z) R Z Z ( ˆ) ( ˆ ) nm 33 Q Zˆ R O Q Rˆ( Z ) Matrix of float ambiguities Matrix of l-s residuals 2 2 Conditional rotation matrix solution CZ ( ) 2 ˆ E + min vec Z Zˆ vec Rˆ + ( Z) R 2 2 ( ) ( ) n m Y Z ˆ 33 Z Rˆ( Z ) Q Z Q Q R O 50 76
51 Constrained Integer Least-Squares No closed-form solutions available Direct search in a set of admissible integer candidates Search space no longer ellipsoidal { n m Z Z C Z χ } Ω ( χ ) = ( ) 2 2 ISSUE: The search might be rather inefficient if one cannot limit the size of the search space Modification of the LAMBDA method 51 76
52 Constrained Integer Least-Squares Z = arg min vec Z Z + min vec R( Z) R Z Z 2 2 ( ˆ) ( ˆ ) nm 33 Q Zˆ R O Q Rˆ( Z ) THE THREE STEP SOLUTION The float estimators The search for the integer minimizer Search and Shrink approach Expansion approach The solution of the nonlinear least-squares problem 52 76
53 Simulations results SIMULATIONS SET-UP Date and time 22 Jan :00 Location Latitude:50º, Longitude: 3º GPS Week 439 Scenario Single baseline, stationary Frequency L1 Baseline length 2 m Samples simulated
![Simulations results σ φ σ p [ mm] [ cm] N 3 1 30 15 5 30 15 5 LAMBDA method Constrained LAMBDA](/docs-images/95/123899933/images/54-0.jpg "Single-frequency Single-epoch SUCCESS RATE [%] 5 6 7 8 0.17 5.69 83.87 0.55 10.18 95.48 99.60 99.")

54 Simulations results σ φ σ p [ mm] [ cm] N LAMBDA method Constrained LAMBDA Single-frequency Single-epoch SUCCESS RATE [%]

55 Experimental results EXPERIMENT SET-UP 1: choke-ring antenna connected to the Ashtech reciver ANTENNAE 2: antenna connected to the Leica SR530 receiver 3: antenna connected to the Novatel OEM3 receiver 55 76
56 Experimental results Single-frequency / Single-epoch SUCCESS RATE [%] 56 76
57 Experimental results Full Attitude Solution: HEADING 57 76
58 Experimental results Full Attitude Solution: ELEVATION 58 76
59 Experimental results Full Attitude Solution: BANK 59 76

60 Experimental results GAIN project Gravimetry using Airborne Inertial Navigation 1 November 2007 flight Cessna Citation II 60 76




61 Experimental results 61 76

62 Experimental results Attitude accuracy Heading Elevation Bank σ ψψ INS σ θθins σ φφins [deg] [deg] [deg]


63 Formation flying: relative positioning 63 76
64 Summary and Conclusions Constrained model for the set of GNSS observations The least-squares minimization with constraints: integerness of the ambiguities orthogonality of the rotation matrix Computationally efficient search method based on a modification of LAMBDA The Constrained LAMBDA method is capable of providing extremely reliable single-epoch / single-frequency solutions Also useful for relative positioning of multi-antenna platforms 64 76
Carrier-phase Ambiguity Success Rates for Integrated GPS-Galileo Satellite Navigation
 Proceedings Space, Aeronautical and Navigational Electronics Symposium SANE2, The Institute of Electronics, Information and Communication Engineers (IEICE), Japan, Vol., No. 2, pp. 3- Carrier-phase Ambiguity
Proceedings Space, Aeronautical and Navigational Electronics Symposium SANE2, The Institute of Electronics, Information and Communication Engineers (IEICE), Japan, Vol., No. 2, pp. 3- Carrier-phase Ambiguity
Integer carrier-phase ambiguity resolution is the key to fast. Integer Aperture Estimation. A Framework for GNSS Ambiguity Acceptance Testing
 working papers Integer Aperture Estimation A Framework for GNSS Ambiguity Acceptance Testing Tracking the carrier phase of GNSS signals has evolved into a widespread practice for achieving rapid and very
working papers Integer Aperture Estimation A Framework for GNSS Ambiguity Acceptance Testing Tracking the carrier phase of GNSS signals has evolved into a widespread practice for achieving rapid and very
Integer least-squares theory for the GNSS compass
 J Geod 2010 84:433 447 DOI 10.1007/s00190-010-0380-8 ORIGINAL ARTICLE Integer least-squares theory for the GNSS compass P. J. G. Teunissen Received: 31 December 2009 / Accepted: 11 March 2010 / Published
J Geod 2010 84:433 447 DOI 10.1007/s00190-010-0380-8 ORIGINAL ARTICLE Integer least-squares theory for the GNSS compass P. J. G. Teunissen Received: 31 December 2009 / Accepted: 11 March 2010 / Published
Satellite Navigation error sources and position estimation
 Satellite Navigation error sources and position estimation Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 6 1 Today s topics Recap: GPS measurements and error sources Signal propagation
Satellite Navigation error sources and position estimation Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 6 1 Today s topics Recap: GPS measurements and error sources Signal propagation
Carrier Phase Techniques
 Carrier Phase Techniques Michael P Vitus August 30, 2005 Introduction This paper provides an explanation of the methods as well as the wor performed on the GPS project under Professor Ng ding the summer
Carrier Phase Techniques Michael P Vitus August 30, 2005 Introduction This paper provides an explanation of the methods as well as the wor performed on the GPS project under Professor Ng ding the summer
Ionosphere influence on success rate of GPS ambiguity resolution in a satellite formation flying
 Journal of Physics: Conference Series PAPER OPEN ACCESS Ionosphere influence on success rate of GPS ambiguity resolution in a satellite formation flying To cite this article: Leandro Baroni 2015 J. Phys.:
Journal of Physics: Conference Series PAPER OPEN ACCESS Ionosphere influence on success rate of GPS ambiguity resolution in a satellite formation flying To cite this article: Leandro Baroni 2015 J. Phys.:
Satellite Navigation PVT estimation and integrity
 Satellite Navigation PVT estimation and integrity Picture: ESA AE4E8 Sandra Verhagen Course 1 11, lecture 7 1 Satellite Navigation (AE4E8 Lecture 7 Today s topics Position, Velocity and Time estimation
Satellite Navigation PVT estimation and integrity Picture: ESA AE4E8 Sandra Verhagen Course 1 11, lecture 7 1 Satellite Navigation (AE4E8 Lecture 7 Today s topics Position, Velocity and Time estimation
Autocorrelation Functions in GPS Data Processing: Modeling Aspects
 Autocorrelation Functions in GPS Data Processing: Modeling Aspects Kai Borre, Aalborg University Gilbert Strang, Massachusetts Institute of Technology Consider a process that is actually random walk but
Autocorrelation Functions in GPS Data Processing: Modeling Aspects Kai Borre, Aalborg University Gilbert Strang, Massachusetts Institute of Technology Consider a process that is actually random walk but
Noise Characteristics in High Precision GPS Positioning
 Noise Characteristics in High Precision GPS Positioning A.R. Amiri-Simkooei, C.C.J.M. Tiberius, P.J.G. Teunissen, Delft Institute of Earth Observation and Space systems (DEOS), Delft University of Technology,
Noise Characteristics in High Precision GPS Positioning A.R. Amiri-Simkooei, C.C.J.M. Tiberius, P.J.G. Teunissen, Delft Institute of Earth Observation and Space systems (DEOS), Delft University of Technology,
Satellite Navigation GPS measurements and error sources
 Satellite Navigation GPS measrements and error sorces Pictre: ESA AE4E08 Sandra Verhagen Corse 2010 2011, lectre 4 1 Today s topics Recap: GPS signal components Code Phase measrements psedoranges Carrier
Satellite Navigation GPS measrements and error sorces Pictre: ESA AE4E08 Sandra Verhagen Corse 2010 2011, lectre 4 1 Today s topics Recap: GPS signal components Code Phase measrements psedoranges Carrier
ESTIMATING THE RESIDUAL TROPOSPHERIC DELAY FOR AIRBORNE DIFFERENTIAL GPS POSITIONING (A SUMMARY)
") ESTIMATING THE RESIDUAL TROPOSPHERIC DELAY FOR AIRBORNE DIFFERENTIAL GPS POSITIONING (A SUMMARY) J. Paul Collins and Richard B. Langley Geodetic Research Laboratory Department of Geodesy and Geomatics
ESTIMATING THE RESIDUAL TROPOSPHERIC DELAY FOR AIRBORNE DIFFERENTIAL GPS POSITIONING (A SUMMARY) J. Paul Collins and Richard B. Langley Geodetic Research Laboratory Department of Geodesy and Geomatics
Modern Navigation. Thomas Herring
 12.215 Modern Navigation Thomas Herring Basic Statistics Summary of last class Statistical description and parameters Probability distributions Descriptions: expectations, variances, moments Covariances
12.215 Modern Navigation Thomas Herring Basic Statistics Summary of last class Statistical description and parameters Probability distributions Descriptions: expectations, variances, moments Covariances
On the realistic stochastic model of GPS observables: Implementation and Performance
 he International Archives of the Photogrammetry, Remote Sensing Spatial Information Sciences, Volume XL-/W5, 05 International Conference on Sensors & Models in Remote Sensing & Photogrammetry, 3 5 Nov
he International Archives of the Photogrammetry, Remote Sensing Spatial Information Sciences, Volume XL-/W5, 05 International Conference on Sensors & Models in Remote Sensing & Photogrammetry, 3 5 Nov
ARTIFICIAL SATELLITES, Vol. 41, No DOI: /v THE LAMBDA METHOD FOR THE GNSS COMPASS
 ARTIFICIAL SATELLITES, Vol. 41, No. 3-2006 DOI: 10.2478/v10018-007-0009-1 THE LAMBDA METHOD FOR THE GNSS COMPASS P.J.G. Teunissen Delft Institute for Earth Observation and Space Systems (DEOS Delft University
ARTIFICIAL SATELLITES, Vol. 41, No. 3-2006 DOI: 10.2478/v10018-007-0009-1 THE LAMBDA METHOD FOR THE GNSS COMPASS P.J.G. Teunissen Delft Institute for Earth Observation and Space Systems (DEOS Delft University
It is the purpose of this contribution to present the probability distribution of the 'xed' baseline. This will be done for the case the ambiguities a
 THE DISTRIBUTION OF THE GPS BASELINE IN CASE OF INTEGER LEAST-SQUARES AMBIGUITY ESTIMATION P.J.G. Teunissen Delft Geodetic Computing Centre (LGR) Faculty of Geodesy Delft University of Technology Thijsseweg
THE DISTRIBUTION OF THE GPS BASELINE IN CASE OF INTEGER LEAST-SQUARES AMBIGUITY ESTIMATION P.J.G. Teunissen Delft Geodetic Computing Centre (LGR) Faculty of Geodesy Delft University of Technology Thijsseweg
ARTIFICIAL SATELLITES, Vol. 41, No DOI: /v
 ARTIFICIAL SATELLITES, Vol. 41, No. 1-006 DOI: 10.478/v10018-007-000-8 On InSAR AMBIGUITY RESOLUTION FOR DEFORMATION MONITORING P.J.G. Teunissen Department of Earth Observation and Space Sstems (DEOS)
ARTIFICIAL SATELLITES, Vol. 41, No. 1-006 DOI: 10.478/v10018-007-000-8 On InSAR AMBIGUITY RESOLUTION FOR DEFORMATION MONITORING P.J.G. Teunissen Department of Earth Observation and Space Sstems (DEOS)
Global Navigation Satellite Systems
 Global Navigation Satellite Systems GPS GLONASS Galileo BeiDou I I (COMPASS)? How Does a GNSS Work? Based on principle of triangulation Also called satellite ranging Signal travels at constant speed (3.0x10
Global Navigation Satellite Systems GPS GLONASS Galileo BeiDou I I (COMPASS)? How Does a GNSS Work? Based on principle of triangulation Also called satellite ranging Signal travels at constant speed (3.0x10
Evaluation of Two Integer Ambiguity Resolution Methods for Real Time GPS Positioning
 Evaluation of Two Integer Ambiguity Resolution Methods for Real Time GPS Positioning LEANDRO BARONI, HÉLIO KOITI KUGA Space Mechanics and Control Division National Institute for Space Research 12227-010,
Evaluation of Two Integer Ambiguity Resolution Methods for Real Time GPS Positioning LEANDRO BARONI, HÉLIO KOITI KUGA Space Mechanics and Control Division National Institute for Space Research 12227-010,
Satellite baseline determination with phase cycle slip fixing over long data gaps
 Satellite baseline determination with phase cycle slip fixing over long data gaps Grzegorz Michalak and Rolf König Overview The cycle slip fixing methode 3 solutions Float ambiguities Ambiguities fixed
Satellite baseline determination with phase cycle slip fixing over long data gaps Grzegorz Michalak and Rolf König Overview The cycle slip fixing methode 3 solutions Float ambiguities Ambiguities fixed
Influence of ambiguity precision on the success rate of GNSS integer ambiguity bootstrapping
 J Geod (007) 8:35 358 DOI 0007/s0090-006-0-3 ORIGINAL ARTICLE Influence of ambiguity precision on the success rate of GNSS integer ambiguity bootstrapping P J G Teunissen Received: March 006 / Accepted:
J Geod (007) 8:35 358 DOI 0007/s0090-006-0-3 ORIGINAL ARTICLE Influence of ambiguity precision on the success rate of GNSS integer ambiguity bootstrapping P J G Teunissen Received: March 006 / Accepted:
Test Computations
 158 7. Test Computations.3.2.1 -.1 -.2 Fourier index 2.8.4 -.4 -.8 Fourier index 2.2.1 -.1 -.2 Fourier index 3.8.4 -.4 -.8 Fourier index 3.2.1 -.1 -.2 -.3 Fourier index 4.8.4 -.4 -.8 Fourier index 4.2.1
158 7. Test Computations.3.2.1 -.1 -.2 Fourier index 2.8.4 -.4 -.8 Fourier index 2.2.1 -.1 -.2 Fourier index 3.8.4 -.4 -.8 Fourier index 3.2.1 -.1 -.2 -.3 Fourier index 4.8.4 -.4 -.8 Fourier index 4.2.1
On the Spectrum of the GPS DD-Ambiguities
 On the Spectrum of the GPS DD-Ambiguities Dr. Peter Teunissen, Paul de Jonge, and Christiaan Tiberius, Delft University of Technology (in: Proceedings ION GPS-94, Salt Lake City, Utah, USA, September 20-23,
On the Spectrum of the GPS DD-Ambiguities Dr. Peter Teunissen, Paul de Jonge, and Christiaan Tiberius, Delft University of Technology (in: Proceedings ION GPS-94, Salt Lake City, Utah, USA, September 20-23,
New Global Navigation Satellite System Ambiguity Resolution Method Compared to Existing Approaches
 JOURNAL OF GUIDANCE, CONTROL, AND DYNAMICS Vol. 29, No. 4, Jul August 2006 New Global Navigation Satellite Sstem Ambiguit Resolution Method Compared to Existing Approaches Sandra Verhagen and Peter J.
JOURNAL OF GUIDANCE, CONTROL, AND DYNAMICS Vol. 29, No. 4, Jul August 2006 New Global Navigation Satellite Sstem Ambiguit Resolution Method Compared to Existing Approaches Sandra Verhagen and Peter J.
First results of instantaneous GPS/Galileo/COMPASS attitude determination
 UNCLASSIFIED Nationaal Lucht- en Ruimtevaartlaboratorium National Aerospace Laboratory NLR Executive summary First results of instantaneous GPS/Galileo/COMPASS attitude determination Problem area The advent
UNCLASSIFIED Nationaal Lucht- en Ruimtevaartlaboratorium National Aerospace Laboratory NLR Executive summary First results of instantaneous GPS/Galileo/COMPASS attitude determination Problem area The advent
On GNSS Ambiguity Acceptance Tests
 International Global Navigation Satellite Systems Society IGNSS Symposium 27 The University o New South Wales, Sydney, Australia 4 6 December, 27 On GNSS Ambiguity Acceptance Tests P.J.G. Teunissen Delt
International Global Navigation Satellite Systems Society IGNSS Symposium 27 The University o New South Wales, Sydney, Australia 4 6 December, 27 On GNSS Ambiguity Acceptance Tests P.J.G. Teunissen Delt
EESC Geodesy with the Global Positioning System. Class 7: Relative Positioning using Carrier-Beat Phase
 EESC 9945 Geodesy with the Global Positioning System Class 7: Relative Positioning using Carrier-Beat Phase GPS Carrier Phase The model for the carrier-beat phase observable for receiver p and satellite
EESC 9945 Geodesy with the Global Positioning System Class 7: Relative Positioning using Carrier-Beat Phase GPS Carrier Phase The model for the carrier-beat phase observable for receiver p and satellite
Modern Navigation
 12.215 Modern Navigation Thomas Herring (tah@mit.edu), MW 10:30-12:00 Room 54-322 http://geoweb.mit.edu/~tah/12.215 Course Overview The development of the Global Positioning System (GPS) started in the
12.215 Modern Navigation Thomas Herring (tah@mit.edu), MW 10:30-12:00 Room 54-322 http://geoweb.mit.edu/~tah/12.215 Course Overview The development of the Global Positioning System (GPS) started in the
Atmospheric delay. X, Y, Z : satellite cartesian coordinates. Z : receiver cartesian coordinates. In the vacuum the signal speed c is constant
 Atmospheric delay In the vacuum the signal speed c is constant c τ = ρ = ( X X ) + ( Y Y ) + ( Z Z ) S S S 2 S 2 S 2 X, Y, Z : receiver cartesian coordinates S S S X, Y, Z : satellite cartesian coordinates
Atmospheric delay In the vacuum the signal speed c is constant c τ = ρ = ( X X ) + ( Y Y ) + ( Z Z ) S S S 2 S 2 S 2 X, Y, Z : receiver cartesian coordinates S S S X, Y, Z : satellite cartesian coordinates
Space Surveillance with Star Trackers. Part II: Orbit Estimation
 AAS -3 Space Surveillance with Star Trackers. Part II: Orbit Estimation Ossama Abdelkhalik, Daniele Mortari, and John L. Junkins Texas A&M University, College Station, Texas 7783-3 Abstract The problem
AAS -3 Space Surveillance with Star Trackers. Part II: Orbit Estimation Ossama Abdelkhalik, Daniele Mortari, and John L. Junkins Texas A&M University, College Station, Texas 7783-3 Abstract The problem
EESC Geodesy with the Global Positioning System. Class 4: The pseudorange and phase observables
 EESC 9945 Geodesy with the Global Positioning System Class 4: The pseudorange and phase observables In previous classes we had presented the equation for the pseudorange as the true range biased by the
EESC 9945 Geodesy with the Global Positioning System Class 4: The pseudorange and phase observables In previous classes we had presented the equation for the pseudorange as the true range biased by the
IGS-related multi-gnss activities at CODE
 IGS-related multi-gnss activities at CODE Lars Prange (1), Rolf Dach (1) Simon Lutz (1), Stefan Schaer (2), Adrian Jäggi (1) (1) Astronomical Institute, University of Bern, Switzerland source: http://boris.unibe.ch/57698/
IGS-related multi-gnss activities at CODE Lars Prange (1), Rolf Dach (1) Simon Lutz (1), Stefan Schaer (2), Adrian Jäggi (1) (1) Astronomical Institute, University of Bern, Switzerland source: http://boris.unibe.ch/57698/
GPS cycle slips detection and repair through various signal combinations
 International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) GPS cycle slips detection and repair through various signal combinations M. E. El-Tokhey 1, T. F. Sorour 2, A. E. Ragheb 3, M. O.
International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) GPS cycle slips detection and repair through various signal combinations M. E. El-Tokhey 1, T. F. Sorour 2, A. E. Ragheb 3, M. O.
VELOX-CI: Advanced Application of GPS for Radio Occultation and Satellite Attitude Determination
 VELOX-CI: Advanced Application of GPS for Radio Occultation and Satellite Attitude Determination Yung-Fu Tsai, Guo Xiong Lee and Kay Soon Low Satellite Research Centre (SaRC) School of Electrical and Electronic
VELOX-CI: Advanced Application of GPS for Radio Occultation and Satellite Attitude Determination Yung-Fu Tsai, Guo Xiong Lee and Kay Soon Low Satellite Research Centre (SaRC) School of Electrical and Electronic
Simplified Filtering Estimator for Spacecraft Attitude Determination from Phase Information of GPS Signals
 WCE 7, July - 4, 7, London, U.K. Simplified Filtering Estimator for Spacecraft Attitude Determination from Phase Information of GPS Signals S. Purivigraipong, Y. Hashida, and M. Unwin Abstract his paper
WCE 7, July - 4, 7, London, U.K. Simplified Filtering Estimator for Spacecraft Attitude Determination from Phase Information of GPS Signals S. Purivigraipong, Y. Hashida, and M. Unwin Abstract his paper
Availability and Reliability Advantages of GPS/Galileo Integration
 Availability and Reliability Advantages of GPS/Galileo Integration Kyle O Keefe Department of Geomatics Engineering The University of Calgary BIOGRAPHY Kyle O Keefe is a graduate student at the Department
Availability and Reliability Advantages of GPS/Galileo Integration Kyle O Keefe Department of Geomatics Engineering The University of Calgary BIOGRAPHY Kyle O Keefe is a graduate student at the Department
Application of Accelerometer Data in Precise Orbit Determination of GRACE -A and -B
 Chin. J. Astron. Astrophys. Vol. 8 (28), No., 63 61 (http://www.chjaa.org) Chinese Journal of Astronomy and Astrophysics Application of Accelerometer Data in Precise Orbit Determination of GRACE -A and
Chin. J. Astron. Astrophys. Vol. 8 (28), No., 63 61 (http://www.chjaa.org) Chinese Journal of Astronomy and Astrophysics Application of Accelerometer Data in Precise Orbit Determination of GRACE -A and
Accuracy of GPS Positioning in the Presence of Large Height Differences
 Accuracy of GPS Positioning in the Presence of Large Height Differences by D. Ugur Sanli & F. Kurumahmut Background Large height difference between baseline points First mentioned by Gurtner et al. 1989
Accuracy of GPS Positioning in the Presence of Large Height Differences by D. Ugur Sanli & F. Kurumahmut Background Large height difference between baseline points First mentioned by Gurtner et al. 1989
A. Barbu, J. Laurent-Varin, F. Perosanz, F. Mercier and J. Marty. AVENUE project. June, 20
 Efficient QR Sequential Least Square algorithm for high frequency GNSS Precise Point Positioning A. Barbu, J. Laurent-Varin, F. Perosanz, F. Mercier and J. Marty AVENUE project June, 20 A. Barbu, J. Laurent-Varin,
Efficient QR Sequential Least Square algorithm for high frequency GNSS Precise Point Positioning A. Barbu, J. Laurent-Varin, F. Perosanz, F. Mercier and J. Marty AVENUE project June, 20 A. Barbu, J. Laurent-Varin,
SIGMA-F: Variances of GPS Observations Determined by a Fuzzy System
 SIGMA-F: Variances of GPS Observations Determined by a Fuzzy System A. Wieser and F.K. Brunner Engineering Surveying and Metrology, Graz University of Technology, Steyrergasse 3, A-8 Graz, Austria Keywords.
SIGMA-F: Variances of GPS Observations Determined by a Fuzzy System A. Wieser and F.K. Brunner Engineering Surveying and Metrology, Graz University of Technology, Steyrergasse 3, A-8 Graz, Austria Keywords.
Approximation of ambiguity covariance matrix for integer de-correlation procedure in single-epoch GNSS positioning
 he 9 th International Conference ENVIRONMENAL ENGINEERING 22 23 May 24, Vilnius, Lithuania SELECED PAPERS eissn 229-792 / eisbn 978-69-457-64-9 Available online at http://enviro.vgtu.lt Section: echnologies
he 9 th International Conference ENVIRONMENAL ENGINEERING 22 23 May 24, Vilnius, Lithuania SELECED PAPERS eissn 229-792 / eisbn 978-69-457-64-9 Available online at http://enviro.vgtu.lt Section: echnologies
Improved GNSS-Based Precise Orbit Determination by using highly accurate clocks
 Improved GNSS-Based Precise Orbit Determination by using highly accurate clocks A. Susnik 1, R. Dach 1, K. Wang 2, M. Meindl 2, M. Rothacher 2, D. Koch 2, T. Romanyuk 3, I. Selmke 3, U. Hugentobler 3,
Improved GNSS-Based Precise Orbit Determination by using highly accurate clocks A. Susnik 1, R. Dach 1, K. Wang 2, M. Meindl 2, M. Rothacher 2, D. Koch 2, T. Romanyuk 3, I. Selmke 3, U. Hugentobler 3,
Department of Electrical Engineering and Information Technology. Institute for Communications and Navigation Prof. Dr. sc. nat.
 Technische Universität München Department of Electrical Engineering and Information Technology Institute for Communications and Navigation Prof. Dr. sc. nat. Christoph Günther Master thesis Partial ambiguity
Technische Universität München Department of Electrical Engineering and Information Technology Institute for Communications and Navigation Prof. Dr. sc. nat. Christoph Günther Master thesis Partial ambiguity
TOWARDS ROBUST LOCALIZATION OF RTK-GPS TOPOGRAPHIC SURVEYS 23
 TOWARDS ROBUST LOCALIZATION OF RTK-GPS TOPOGRAPHIC SURVEYS Jerry W. Nave, North Carolina A&T University; Tarig A. Ali, American University of Sharjah Abstract Localization is performed to fit the observed
TOWARDS ROBUST LOCALIZATION OF RTK-GPS TOPOGRAPHIC SURVEYS Jerry W. Nave, North Carolina A&T University; Tarig A. Ali, American University of Sharjah Abstract Localization is performed to fit the observed
NEW GEODETIC REFERENCE FRAME KOSOVAREV 01
 Bashkim IDRIZI Ismail KABASHI NEW GEODETIC REFERENCE FRAME KOSOVAREV 01 Overview: Basic data of the Republic of Kosova Geodetic referent frame before year 2001 KOSOVAREF 01 KOSOVAREF 01 1 st order Observations
Bashkim IDRIZI Ismail KABASHI NEW GEODETIC REFERENCE FRAME KOSOVAREV 01 Overview: Basic data of the Republic of Kosova Geodetic referent frame before year 2001 KOSOVAREF 01 KOSOVAREF 01 1 st order Observations
DGPS Kinematic Carrier Phase Signal Simulation Analysis for Precise Aircraft Velocity Determination
 DGPS Kinematic Carrier Phase Signal Simulation Analysis for Precise Aircraft Velocity Determination Capt. J. Hebert and J. Keith 76th Test Squadron (CIGTF) Holloman AFB, NM S. Ryan, M. Szarmes, G. Lachapelle
DGPS Kinematic Carrier Phase Signal Simulation Analysis for Precise Aircraft Velocity Determination Capt. J. Hebert and J. Keith 76th Test Squadron (CIGTF) Holloman AFB, NM S. Ryan, M. Szarmes, G. Lachapelle
GPS/INS Tightly coupled position and attitude determination with low-cost sensors Master Thesis
 GPS/INS Tightly coupled position and attitude determination with low-cost sensors Master Thesis Michele Iafrancesco Institute for Communications and Navigation Prof. Dr. Christoph Günther Supervised by
GPS/INS Tightly coupled position and attitude determination with low-cost sensors Master Thesis Michele Iafrancesco Institute for Communications and Navigation Prof. Dr. Christoph Günther Supervised by
GNSS: Global Navigation Satellite Systems
 GNSS: Global Navigation Satellite Systems Global: today the American GPS (Global Positioning Service), http://gps.losangeles.af.mil/index.html the Russian GLONASS, http://www.glonass-center.ru/frame_e.html
GNSS: Global Navigation Satellite Systems Global: today the American GPS (Global Positioning Service), http://gps.losangeles.af.mil/index.html the Russian GLONASS, http://www.glonass-center.ru/frame_e.html
1 The satellite altimeter measurement
 1 The satellite altimeter measurement In the ideal case, a satellite altimeter measurement is equal to the instantaneous distance between the satellite s geocenter and the ocean surface. However, an altimeter
1 The satellite altimeter measurement In the ideal case, a satellite altimeter measurement is equal to the instantaneous distance between the satellite s geocenter and the ocean surface. However, an altimeter
A Mission to Planet Mars Gravity Field Determination
 A Mission to Planet Mars Gravity Field Determination Department for Theoretical Geodesy Graz University of Technology and Space Research Institute Austrian Academy of Sciences Gravity field CHAMP GRACE
A Mission to Planet Mars Gravity Field Determination Department for Theoretical Geodesy Graz University of Technology and Space Research Institute Austrian Academy of Sciences Gravity field CHAMP GRACE
Protection Level Calculation in the Presence of Heavy Tail Errors Using Measurement Residuals
 Protection Level Calculation in the Presence of Heavy Tail Errors Using Measurement Residuals Juan Blanch, Todd Walter, Per Enge Stanford University blanch@stanford.edu ABSTRACT In safety-of-life applications
Protection Level Calculation in the Presence of Heavy Tail Errors Using Measurement Residuals Juan Blanch, Todd Walter, Per Enge Stanford University blanch@stanford.edu ABSTRACT In safety-of-life applications
GPS Geodesy - LAB 7. Neglecting the propagation, multipath, and receiver errors, eq.(1) becomes:
 becomes:") GPS Geodesy - LAB 7 GPS pseudorange position solution The pseudorange measurements j R i can be modeled as: j R i = j ρ i + c( j δ δ i + ΔI + ΔT + MP + ε (1 t = time of epoch j R i = pseudorange measurement
GPS Geodesy - LAB 7 GPS pseudorange position solution The pseudorange measurements j R i can be modeled as: j R i = j ρ i + c( j δ δ i + ΔI + ΔT + MP + ε (1 t = time of epoch j R i = pseudorange measurement
Real-Time Estimation of GPS Satellite Clocks Based on Global NTRIP-Streams. André Hauschild
 Real-Time Estimation of GPS Satellite Clocks Based on Global NTRIP-Streams André Hauschild Agenda Motivation Overview of the real-time clock estimation system Assessment of clock product quality a) SISRE
Real-Time Estimation of GPS Satellite Clocks Based on Global NTRIP-Streams André Hauschild Agenda Motivation Overview of the real-time clock estimation system Assessment of clock product quality a) SISRE
AS3010: Introduction to Space Technology
 AS3010: Introduction to Space Technology L E C T U R E 6 Part B, Lecture 6 17 March, 2017 C O N T E N T S In this lecture, we will look at various existing satellite tracking techniques. Recall that we
AS3010: Introduction to Space Technology L E C T U R E 6 Part B, Lecture 6 17 March, 2017 C O N T E N T S In this lecture, we will look at various existing satellite tracking techniques. Recall that we
Climate Monitoring with Radio Occultation Data
 Climate Monitoring with Radio Occultation Data Systematic Error Sources C. Rocken, S. Sokolovskiy, B. Schreiner, D. Hunt, B. Ho, B. Kuo, U. Foelsche Radio Occultation Claims Most stable Global Thermometer
Climate Monitoring with Radio Occultation Data Systematic Error Sources C. Rocken, S. Sokolovskiy, B. Schreiner, D. Hunt, B. Ho, B. Kuo, U. Foelsche Radio Occultation Claims Most stable Global Thermometer
AIM RS: Radio Science Investigation with AIM
 Prepared by: University of Bologna Ref. number: ALMARS012016 Version: 1.0 Date: 08/03/2017 PROPOSAL TO ESA FOR AIM RS Radio Science Investigation with AIM ITT Reference: Partners: Radio Science and Planetary
Prepared by: University of Bologna Ref. number: ALMARS012016 Version: 1.0 Date: 08/03/2017 PROPOSAL TO ESA FOR AIM RS Radio Science Investigation with AIM ITT Reference: Partners: Radio Science and Planetary
BeiDou Inter-Satellite-Type Bias Evaluation and Calibration for Mixed Receiver Attitude Determination
 Sensors 213, 13, 943-9463; doi:1.339/s137943 OPEN ACCESS sensors ISSN 1424-822 www.mdpi.com/journal/sensors Article BeiDou Inter-Satellite-Type Bias Evaluation and Calibration for Mixed Receiver Attitude
Sensors 213, 13, 943-9463; doi:1.339/s137943 OPEN ACCESS sensors ISSN 1424-822 www.mdpi.com/journal/sensors Article BeiDou Inter-Satellite-Type Bias Evaluation and Calibration for Mixed Receiver Attitude
Integration of a strapdown gravimeter system in an Autonomous Underwater Vehicle
 Integration of a strapdown gravimeter system in an Autonomous Underwater Vehicle Clément ROUSSEL PhD - Student (L2G - Le Mans - FRANCE) April 17, 2015 Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015
Integration of a strapdown gravimeter system in an Autonomous Underwater Vehicle Clément ROUSSEL PhD - Student (L2G - Le Mans - FRANCE) April 17, 2015 Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015
Consistency of antenna products in the MGEX environment
 Consistency of antenna products in the MGEX environment A. Villiger 1, R. Dach 1, L. Prange 1, S. Schaer 12, A. Jäggi 1 1 Astronomical Institute, University of Bern, Bern, Switzerland 2 swisstopo, Wabern,
Consistency of antenna products in the MGEX environment A. Villiger 1, R. Dach 1, L. Prange 1, S. Schaer 12, A. Jäggi 1 1 Astronomical Institute, University of Bern, Bern, Switzerland 2 swisstopo, Wabern,
SENSITIVITY ANALYSIS OF MULTIPLE FAULT TEST AND RELIABILITY MEASURES IN INTEGRATED GPS/INS SYSTEMS
 Arcves of Photogrammetry, Cartography and Remote Sensing, Vol., 011, pp. 5-37 ISSN 083-14 SENSITIVITY ANALYSIS OF MULTIPLE FAULT TEST AND RELIABILITY MEASURES IN INTEGRATED GPS/INS SYSTEMS Ali Almagbile
Arcves of Photogrammetry, Cartography and Remote Sensing, Vol., 011, pp. 5-37 ISSN 083-14 SENSITIVITY ANALYSIS OF MULTIPLE FAULT TEST AND RELIABILITY MEASURES IN INTEGRATED GPS/INS SYSTEMS Ali Almagbile
Nutation determination by means of GNSS
 Nutation determination by means of GNSS - Comparison with VLBI Nicole Capitaine, Kunliang Yao SYRTE - Observatoire de Paris, CNRS/UPMC, France Introduction Space geodetic techniques cannot be used for
Nutation determination by means of GNSS - Comparison with VLBI Nicole Capitaine, Kunliang Yao SYRTE - Observatoire de Paris, CNRS/UPMC, France Introduction Space geodetic techniques cannot be used for
Impact of Tropospheric Delay Gradients on Total Tropospheric Delay and Precise Point Positioning
 International Journal of Geosciences, 016, 7, 645-654 Published Online May 016 in SciRes. http://www.scirp.org/journal/ijg http://dx.doi.org/10.436/ijg.016.75050 Impact of Tropospheric Delay Gradients
International Journal of Geosciences, 016, 7, 645-654 Published Online May 016 in SciRes. http://www.scirp.org/journal/ijg http://dx.doi.org/10.436/ijg.016.75050 Impact of Tropospheric Delay Gradients
GRACE Gravity Model GGM02
 GRACE Gravity Model GGM02 The GGM02S gravity model was estimated with 363 days (spanning April 2002 through December 2003) of GRACE K-band range-rate, attitude, and accelerometer data. No Kaula constraint,
GRACE Gravity Model GGM02 The GGM02S gravity model was estimated with 363 days (spanning April 2002 through December 2003) of GRACE K-band range-rate, attitude, and accelerometer data. No Kaula constraint,
Radio occultation at GFZ Potsdam: Current status and future prospects
 Radio occultation at GFZ Potsdam: Current status and future prospects J. Wickert, T. Schmidt, G. Beyerle, S. Heise, R. Stosius GFZ German Research Centre for Geosciences, Potsdam, Germany The CHAMP, GRACE,
Radio occultation at GFZ Potsdam: Current status and future prospects J. Wickert, T. Schmidt, G. Beyerle, S. Heise, R. Stosius GFZ German Research Centre for Geosciences, Potsdam, Germany The CHAMP, GRACE,
Design of Adaptive Filtering Algorithm for Relative Navigation
 Design of Adaptive Filtering Algorithm for Relative Navigation Je Young Lee, Hee Sung Kim, Kwang Ho Choi, Joonhoo Lim, Sung Jin Kang, Sebum Chun, and Hyung Keun Lee Abstract Recently, relative navigation
Design of Adaptive Filtering Algorithm for Relative Navigation Je Young Lee, Hee Sung Kim, Kwang Ho Choi, Joonhoo Lim, Sung Jin Kang, Sebum Chun, and Hyung Keun Lee Abstract Recently, relative navigation
Developments towards GNSS real-time service in GFZ
 1 Developments towards GNSS real-time service in GFZ Dousa, J., Ge, M., Chen J., Gendt, G. Helmholtz-Zentrum Potsdam, Deutsches GeoForschungsZentrum Geng, J. University Institute of Engineering Surveying
1 Developments towards GNSS real-time service in GFZ Dousa, J., Ge, M., Chen J., Gendt, G. Helmholtz-Zentrum Potsdam, Deutsches GeoForschungsZentrum Geng, J. University Institute of Engineering Surveying
GEODETIC NETWORK OF SAUDI ARABIA AND FIDUCIAL STATIONS. GFN OF Saudi Arabia in Based on ITRF2000 Datum
 STUDIES OF TECTONIC MOVEMENTS IN SAUDI ARABIA USING CORS M. Al Rajhi, Ali Al Omar, R. Yanar, F. Kartal, K. Eren, SUBJECT TO TALKS BACKGROUND GEODETIC NETWORK OF SAUDI ARABIA AND FIDUCIAL STATIONS GFN OF
STUDIES OF TECTONIC MOVEMENTS IN SAUDI ARABIA USING CORS M. Al Rajhi, Ali Al Omar, R. Yanar, F. Kartal, K. Eren, SUBJECT TO TALKS BACKGROUND GEODETIC NETWORK OF SAUDI ARABIA AND FIDUCIAL STATIONS GFN OF
Accelerometers for GNSS Orbit Determination
 Accelerometers for GNSS Orbit Determination Urs Hugentobler, Anja Schlicht Technische Universität München 5th International Colloquium on Scientific and Fundamental Aspects of the Galileo Programme October
Accelerometers for GNSS Orbit Determination Urs Hugentobler, Anja Schlicht Technische Universität München 5th International Colloquium on Scientific and Fundamental Aspects of the Galileo Programme October
EFFECIENCY OF GPS TECHNIQUES IN NATIONAL APPLICATIONS
 Proceedings of the International Conference on Integrated Management of Water Resources in the 21 st Century, Cairo, Egypt, November 21-25, 1999, Volume II, pp. 741-752. EFFECIENCY OF GPS TECHNIQUES IN
Proceedings of the International Conference on Integrated Management of Water Resources in the 21 st Century, Cairo, Egypt, November 21-25, 1999, Volume II, pp. 741-752. EFFECIENCY OF GPS TECHNIQUES IN
The National Spatial Reference System of the Future
 The National Spatial Reference System of the Future William Stone Southwest Region (AZ, NM, NV, UT) Geodetic Advisor william.stone@noaa.gov NOAA s National Geodetic Survey geodesy.noaa.gov Salt Lake City
The National Spatial Reference System of the Future William Stone Southwest Region (AZ, NM, NV, UT) Geodetic Advisor william.stone@noaa.gov NOAA s National Geodetic Survey geodesy.noaa.gov Salt Lake City
PGM2016: A new geoid model for the. Philippines
 PGM2016: A new geoid model for the Philippines United Nations/Nepal Workshop on the Applications of Global Navigation Satellite Systems Kathmandu, Nepal December 12-16, 2016 Ronaldo Gatchalian, Chief Geodesy
PGM2016: A new geoid model for the Philippines United Nations/Nepal Workshop on the Applications of Global Navigation Satellite Systems Kathmandu, Nepal December 12-16, 2016 Ronaldo Gatchalian, Chief Geodesy
Update on the In-orbit Performances of GIOVE Clocks
 Update on the In-orbit Performances of GIOVE Clocks Pierre Waller, Francisco Gonzalez, Stefano Binda, ESA/ESTEC Ilaria Sesia, Patrizia Tavella, INRiM Irene Hidalgo, Guillermo Tobias, GMV Abstract The Galileo
Update on the In-orbit Performances of GIOVE Clocks Pierre Waller, Francisco Gonzalez, Stefano Binda, ESA/ESTEC Ilaria Sesia, Patrizia Tavella, INRiM Irene Hidalgo, Guillermo Tobias, GMV Abstract The Galileo
Trimble RTX TM Orbit Determination and User Positioning Performance with BeiDou Satellites
 Nick Talbot, Xiaoming Chen, Nico Reussner, Markus Brandl, Markus Nitschke, Carlos Rodriguez-Solano, Feipeng Zhang Trimble Terrasat GmbH IGNSS 2016, SYDNEY, AUSTRALIA Trimble RTX TM Orbit Determination
Nick Talbot, Xiaoming Chen, Nico Reussner, Markus Brandl, Markus Nitschke, Carlos Rodriguez-Solano, Feipeng Zhang Trimble Terrasat GmbH IGNSS 2016, SYDNEY, AUSTRALIA Trimble RTX TM Orbit Determination
Use of ground-based GNSS measurements in data assimilation. Reima Eresmaa Finnish Meteorological Institute
 Use of ground-based GNSS measurements in data assimilation Reima Eresmaa Finnish Meteorological Institute 16 June 2006 Outline 1) Introduction GNSS * positioning Tropospheric delay 2) GNSS as a meteorological
Use of ground-based GNSS measurements in data assimilation Reima Eresmaa Finnish Meteorological Institute 16 June 2006 Outline 1) Introduction GNSS * positioning Tropospheric delay 2) GNSS as a meteorological
CODE's multi-gnss orbit and clock solution
 source: https://doi.org/10.7892/boris.68193 downloaded: 13.3.2017 CODE's multi-gnss orbit and clock solution L. Prange, E. Orliac, R. Dach, D. Arnold, G. Beutler, S. Schaer, A. Jäggi Astronomical Institute,
source: https://doi.org/10.7892/boris.68193 downloaded: 13.3.2017 CODE's multi-gnss orbit and clock solution L. Prange, E. Orliac, R. Dach, D. Arnold, G. Beutler, S. Schaer, A. Jäggi Astronomical Institute,
GPS Multipath Detection Based on Sequence of Successive-Time Double-Differences
 1 GPS Multipath Detection Based on Sequence of Successive-Time Double-Differences Hyung Keun Lee, Jang-Gyu Lee, and Gyu-In Jee Hyung Keun Lee is with Seoul National University-Korea University Joint Research
1 GPS Multipath Detection Based on Sequence of Successive-Time Double-Differences Hyung Keun Lee, Jang-Gyu Lee, and Gyu-In Jee Hyung Keun Lee is with Seoul National University-Korea University Joint Research
H-ARAIM Exclusion: Requirements and Performance
 H-ARAIM Exclusion: Requirements and Performance Yawei Zhai, Boris Pervan Illinois Institute of Technology, Chicago, IL Mathieu Joerger The University of Arizona, Tucson, AZ September 16, 2016 Background
H-ARAIM Exclusion: Requirements and Performance Yawei Zhai, Boris Pervan Illinois Institute of Technology, Chicago, IL Mathieu Joerger The University of Arizona, Tucson, AZ September 16, 2016 Background
Multi-GNSS Opportunities and Challenges
 Multi-GNSS Opportunities and Challenges School of Surveying & Spatial Information Systems Ali Al-Shaery 1,2 Shaocheng Zhang 3 Samsung Lim 1 Chris Rizos 1 1 School of Surveying and Spatial Information System,
Multi-GNSS Opportunities and Challenges School of Surveying & Spatial Information Systems Ali Al-Shaery 1,2 Shaocheng Zhang 3 Samsung Lim 1 Chris Rizos 1 1 School of Surveying and Spatial Information System,
GPS point positioning (using psuedorange from code). and earthquake location (using P or S travel times).
. and earthquake location (using P or S travel times).") GPS point positioning (using psuedorange from code). and earthquake location (using P or S travel times). 15 17 From J. HOW, MIT, GPS-RJH5.pdf 18 P 1 = P 2 = P 3 = P 4 = ( X X 1 ) 2 + (Y Y 1 ) 2 + (Z
GPS point positioning (using psuedorange from code). and earthquake location (using P or S travel times). 15 17 From J. HOW, MIT, GPS-RJH5.pdf 18 P 1 = P 2 = P 3 = P 4 = ( X X 1 ) 2 + (Y Y 1 ) 2 + (Z
Cycle Slip Detection and Correction Methods with Time-Differenced Model for Single Frequency GNSS Applications*
 Vol 6, No 1, pp 15, 13 Special Issue on the 3rd ISCIE International Symposium on Stochastic Systems Theory and Its Applications III Paper Cycle Slip Detection and Correction Methods with Time-Differenced
Vol 6, No 1, pp 15, 13 Special Issue on the 3rd ISCIE International Symposium on Stochastic Systems Theory and Its Applications III Paper Cycle Slip Detection and Correction Methods with Time-Differenced
Analytical Non-Linear Uncertainty Propagation: Theory And Implementation
 Analytical Non-Linear Uncertainty Propagation: Theory And Implementation Kohei Fujimoto 1), Daniel J. Scheeres 2), and K. Terry Alfriend 1) May 13, 2013 1) Texas A&M University 2) The University of Colorado
Analytical Non-Linear Uncertainty Propagation: Theory And Implementation Kohei Fujimoto 1), Daniel J. Scheeres 2), and K. Terry Alfriend 1) May 13, 2013 1) Texas A&M University 2) The University of Colorado
Principles of the Global Positioning System Lecture 14
 12.540 Principles of the Global Positioning System Lecture 14 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 Propagation Medium Propagation: Signal propagation from satellite to receiver Light-time
12.540 Principles of the Global Positioning System Lecture 14 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 Propagation Medium Propagation: Signal propagation from satellite to receiver Light-time
GGOS Bureau for Standards and Conventions
 GGOS D. Angermann (1), T. Gruber (2), J. Bouman (1), M. Gerstl (1), R. Heinkelmann (1), U. Hugentobler (2), L. Sánchez (1), P. Steigenberger (2) (1) Deutsches Geodätisches Forschungsinstitut (DGFI), München
GGOS D. Angermann (1), T. Gruber (2), J. Bouman (1), M. Gerstl (1), R. Heinkelmann (1), U. Hugentobler (2), L. Sánchez (1), P. Steigenberger (2) (1) Deutsches Geodätisches Forschungsinstitut (DGFI), München
The Open Service Signal in Space Navigation Data Comparison of the Global Positioning System and the BeiDou Navigation Satellite System
 Sensors 214, 14, 15182-1522; doi:1.339/s14815182 Article OPEN ACCESS sensors ISSN 1424-822 www.mdpi.com/journal/sensors The Open Service Signal in Space Navigation Data Comparison of the Global Positioning
Sensors 214, 14, 15182-1522; doi:1.339/s14815182 Article OPEN ACCESS sensors ISSN 1424-822 www.mdpi.com/journal/sensors The Open Service Signal in Space Navigation Data Comparison of the Global Positioning
FEASIBILITY OF DIRECTLY MEASURING SINGLE LINE-OF-SIGHT GPS SIGNAL DELAYS
 FEASIBILITY OF DIRECTLY MEASURING SINGLE LINE-OF-SIGHT GPS SIGNAL DELAYS Pedro Elosegui and James L. Davis Smithsonian Astrophysical Observatory Cambridge, MA 13, USA January, 3 1 1. Executive Summary
FEASIBILITY OF DIRECTLY MEASURING SINGLE LINE-OF-SIGHT GPS SIGNAL DELAYS Pedro Elosegui and James L. Davis Smithsonian Astrophysical Observatory Cambridge, MA 13, USA January, 3 1 1. Executive Summary
Least-Squares Variance Component Estimation:
 Least-Squares Variance Component Estimation: Theory and GPS Applications A.R. Amiri-Simkooei Least-Squares Variance Component Estimation: Theory and GPS Applications PROEFSCHRIFT ter verkrijging van de
Least-Squares Variance Component Estimation: Theory and GPS Applications A.R. Amiri-Simkooei Least-Squares Variance Component Estimation: Theory and GPS Applications PROEFSCHRIFT ter verkrijging van de
Analysis of Relative Motion of Collocated Geostationary Satellites with Geometric Constraints
 Analysis of Relative Motion of Collocated Geostationary Satellites with Geometric Constraints F.J. de Bruijn, E. Gill Abstract This paper investigates the design of the relative motion orbits of geostationary
Analysis of Relative Motion of Collocated Geostationary Satellites with Geometric Constraints F.J. de Bruijn, E. Gill Abstract This paper investigates the design of the relative motion orbits of geostationary
The ACES Mission. Fundamental Physics Tests with Cold Atom Clocks in Space. L. Cacciapuoti European Space Agency
 The ACES Mission Fundamental Physics Tests with Cold Atom Clocks in Space L. Cacciapuoti European Space Agency La Thuile, 20-27 March 2011 Gravitational Waves and Experimental Gravity 1 ACES Mission Concept
The ACES Mission Fundamental Physics Tests with Cold Atom Clocks in Space L. Cacciapuoti European Space Agency La Thuile, 20-27 March 2011 Gravitational Waves and Experimental Gravity 1 ACES Mission Concept
Cointegrated VAR s. Eduardo Rossi University of Pavia. November Rossi Cointegrated VAR s Financial Econometrics / 56
 Cointegrated VAR s Eduardo Rossi University of Pavia November 2013 Rossi Cointegrated VAR s Financial Econometrics - 2013 1 / 56 VAR y t = (y 1t,..., y nt ) is (n 1) vector. y t VAR(p): Φ(L)y t = ɛ t The
Cointegrated VAR s Eduardo Rossi University of Pavia November 2013 Rossi Cointegrated VAR s Financial Econometrics - 2013 1 / 56 VAR y t = (y 1t,..., y nt ) is (n 1) vector. y t VAR(p): Φ(L)y t = ɛ t The
Active microwave systems (2) Satellite Altimetry * the movie * applications
 Satellite Altimetry * the movie * applications") Remote Sensing: John Wilkin wilkin@marine.rutgers.edu IMCS Building Room 211C 732-932-6555 ext 251 Active microwave systems (2) Satellite Altimetry * the movie * applications Altimeters (nadir pointing
Remote Sensing: John Wilkin wilkin@marine.rutgers.edu IMCS Building Room 211C 732-932-6555 ext 251 Active microwave systems (2) Satellite Altimetry * the movie * applications Altimeters (nadir pointing
Introduction: the Abruzzo earthquake The network and the processing strategies. displacements estimation at earthquake epoch. horizontal displacements
 The Abruzzo earthquake: temporal and spatial analysis of the first geodetic results L. Biagi, S. Caldera, D. Dominici, F. Sansò Politecnico di Milano Università degli studi de L Aquila Outline Introduction:
The Abruzzo earthquake: temporal and spatial analysis of the first geodetic results L. Biagi, S. Caldera, D. Dominici, F. Sansò Politecnico di Milano Università degli studi de L Aquila Outline Introduction:
Analysis of Relative Motion of Collocated Geostationary Satellites with Geometric Constraints
 www.dlr.de Chart 1 Analysis of Relative Motion of Collocated Geostationary Satellites with Geometric Constraints SFFMT2013, München F. de Bruijn & E. Gill 31 May 2013 www.dlr.de Chart 2 Presentation Outline
www.dlr.de Chart 1 Analysis of Relative Motion of Collocated Geostationary Satellites with Geometric Constraints SFFMT2013, München F. de Bruijn & E. Gill 31 May 2013 www.dlr.de Chart 2 Presentation Outline
Experimental verification of Internet-based Global Differential GPS
 Experimental verification of Internet-based Global Differential GPS M.O. Kechine, C.C.J.M. Tiberius and H. van der Marel Section of Mathematical Geodesy and Positioning (MGP) Delft University of Technology
Experimental verification of Internet-based Global Differential GPS M.O. Kechine, C.C.J.M. Tiberius and H. van der Marel Section of Mathematical Geodesy and Positioning (MGP) Delft University of Technology
Influences of different factors on temporal correlations of GNSS observations
 2 T : oscillation period (unknown) C : scaling factor (unknown) ND : determined empirically a priori C,T: least-squares regression on sample ACF ND : first zero point of sample ACF h= ACF h π h ND ND T
2 T : oscillation period (unknown) C : scaling factor (unknown) ND : determined empirically a priori C,T: least-squares regression on sample ACF ND : first zero point of sample ACF h= ACF h π h ND ND T
Dynamic data processing recursive least-squares
 Dynamic data processing recursive least-squares Dynamic data processing recursive least-squares Delft University of Technology Department of Mathematical Geodesy and Positioning VSSD Series on Mathematical
Dynamic data processing recursive least-squares Dynamic data processing recursive least-squares Delft University of Technology Department of Mathematical Geodesy and Positioning VSSD Series on Mathematical
Benefits of State Space Modeling in GNSS Multi-Station Adjustment
 Benefits of State Space Modeling in GNSS Multi-Station Adjustment Andreas Bagge, Gerhard Wübbena Martin Schmitz Geo++ GmbH D-30827 Garbsen, Germany www.geopp.de GeoInformation Workshop 2004, Istanbul Kultur
Benefits of State Space Modeling in GNSS Multi-Station Adjustment Andreas Bagge, Gerhard Wübbena Martin Schmitz Geo++ GmbH D-30827 Garbsen, Germany www.geopp.de GeoInformation Workshop 2004, Istanbul Kultur
EUROPEAN GNSS (GALILEO) INITIAL SERVICES NAVIGATION SOLUTIONS POWERED BY E U R O P E OPEN SERVICE QUARTERLY PERFORMANCE REPORT
 INITIAL SERVICES NAVIGATION SOLUTIONS POWERED BY E U R O P E OPEN SERVICE QUARTERLY PERFORMANCE REPORT") NAVIGATION SOLUTIONS POWERED BY E U R O P E EUROPEAN GNSS (GALILEO) INITIAL SERVICES OPEN SERVICE QUARTERLY PERFORMANCE REPORT APRIL - JUNE 2018 GALILEO INITIAL SERVICES OPEN SERVICE QUARTERLY PERFORMANCE
NAVIGATION SOLUTIONS POWERED BY E U R O P E EUROPEAN GNSS (GALILEO) INITIAL SERVICES OPEN SERVICE QUARTERLY PERFORMANCE REPORT APRIL - JUNE 2018 GALILEO INITIAL SERVICES OPEN SERVICE QUARTERLY PERFORMANCE
estimator is a random vector. Conceptually we may write a = F (y), where a denotes the integer ambiguity vector, y the vector of observables, and F (:
, where a denotes the integer ambiguity vector, y the vector of observables, and F (:") ON THE INTEGER NORMAL DISTRIBUTION OF THE GPS AMBIGUITIES P.J.G. Teunissen Delft Geodetic Computing Centre (LGR) Faculty of Geodesy Delft University of Technology Thijsseweg 2629 JA Delft, The Netherlands
ON THE INTEGER NORMAL DISTRIBUTION OF THE GPS AMBIGUITIES P.J.G. Teunissen Delft Geodetic Computing Centre (LGR) Faculty of Geodesy Delft University of Technology Thijsseweg 2629 JA Delft, The Netherlands
Multi-Sensor Fusion for Localization of a Mobile Robot in Outdoor Environments
 Multi-Sensor Fusion for Localization of a Mobile Robot in Outdoor Environments Thomas Emter, Arda Saltoğlu and Janko Petereit Introduction AMROS Mobile platform equipped with multiple sensors for navigation
Multi-Sensor Fusion for Localization of a Mobile Robot in Outdoor Environments Thomas Emter, Arda Saltoğlu and Janko Petereit Introduction AMROS Mobile platform equipped with multiple sensors for navigation
EUROPEAN GNSS (GALILEO) INITIAL SERVICES NAVIGATION SOLUTIONS POWERED BY E U R O P E OPEN SERVICE QUARTERLY PERFORMANCE REPORT
 INITIAL SERVICES NAVIGATION SOLUTIONS POWERED BY E U R O P E OPEN SERVICE QUARTERLY PERFORMANCE REPORT") NAVIGATION SOLUTIONS POWERED BY E U R O P E EUROPEAN GNSS (GALILEO) INITIAL SERVICES OPEN SERVICE QUARTERLY PERFORMANCE REPORT OCTOBER - DECEMBER 2017 TABLE OF CONTENTS 1 INTRODUCTION... 1 2 EXECUTIVE
NAVIGATION SOLUTIONS POWERED BY E U R O P E EUROPEAN GNSS (GALILEO) INITIAL SERVICES OPEN SERVICE QUARTERLY PERFORMANCE REPORT OCTOBER - DECEMBER 2017 TABLE OF CONTENTS 1 INTRODUCTION... 1 2 EXECUTIVE
OPTIMAL ESTIMATION of DYNAMIC SYSTEMS
 CHAPMAN & HALL/CRC APPLIED MATHEMATICS -. AND NONLINEAR SCIENCE SERIES OPTIMAL ESTIMATION of DYNAMIC SYSTEMS John L Crassidis and John L. Junkins CHAPMAN & HALL/CRC A CRC Press Company Boca Raton London
CHAPMAN & HALL/CRC APPLIED MATHEMATICS -. AND NONLINEAR SCIENCE SERIES OPTIMAL ESTIMATION of DYNAMIC SYSTEMS John L Crassidis and John L. Junkins CHAPMAN & HALL/CRC A CRC Press Company Boca Raton London