An introduction to the Immersed boundary method and its finite element approximation
|
|
|
- Liliana Campbell
- 5 years ago
- Views:
Transcription
1 FE An introduction to te and its finite element approximation Collaborators: Daniele offi, Luca Heltai and Nicola Cavallini, Pavia Pavia, 27 maggio 2010
2 FE History Introduced by Peskin Flow patterns around eart valves: a digital computer for solving te equations of motion <PD Tesis, 1972> analysis of blood flow in te eart <J. Comput. Pys., 1977> Extended by Peskin and McQueen since 83 to simulate te blood flow in a tree dimensional model of eart and great vessels Review article by Peskin Te immersed <Acta Numerica, 2002> Several applications in biology, wen a fluid interacts wit a flexible structure.
3 FE Main features Te structure is a part of te fluid wit additional forces and mass. Te Navier-Stokes equations are solved everywere. Te interaction wit te structure is obtained by means of a singular force term defined by a Dirac delta function. Te immersed material is modeled as a collection of fibers. Discretization based on finite differences.
4 FE FE discretization of IM <offi G., C&S 2003> <offi G. Heltai 2004, M3AS 2007> <offi G. Heltai Peskin CMAME 2008> <offi Cavallini G. 2010> of te FSI force No approximation of te Dirac delta function etter interface approximation (less diffusion, sarp pressure jump) Effective mixed finite elements for te approximation of te fluid equations. Submerged elastic solid occupying volume may also be considered.
5 FE elastic bodies Codimension 0 Codimension 1 t Elastic body Fluid body of codimension 0 te fluid domain and te immersed body ave te same dimension
6 FE elastic bodies Codimension 0 Codimension 1 t Elastic body Elastic t Fluid Fluid body of codimension 0 te fluid domain and te immersed body ave te same dimension body of codimension 1 te immersed body is eiter a curve in 2D or a surface in 3D
7 FE ω X(t) Notation Codimension 0 Codimension 1 t fluid + solid t deformable structure domain R d, d = 2, 3 t R m, m = d, d 1
8 FE ω X(t) Notation Codimension 0 Codimension 1 t fluid + solid t deformable structure domain R d, d = 2, 3 t R m, m = d, d 1 x Euler. var. in s Lagrangian var. in reference domain
9 FE ω X(t) Notation Codimension 0 Codimension 1 t fluid + solid t deformable structure domain R d, d = 2, 3 t R m, m = d, d 1 x Euler. var. in s Lagrangian var. in reference domain u(x, t) fluid velocity X(, t) : t position of te solid p(x, t) fluid pressure F = X deformation grad. (det F > 0) s
10 FE ω X(t) Notation Codimension 0 Codimension 1 t fluid + solid t deformable structure domain R d, d = 2, 3 t R m, m = d, d 1 x Euler. var. in s Lagrangian var. in reference domain u(x, t) fluid velocity X(, t) : t position of te solid p(x, t) fluid pressure F = X deformation grad. (det F > 0) s u(x, t) = X (s, t) were x = X(s, t) t
11 FE Codimension 0 Codimension 1 Case: m = d From conservation of momenta, in absence of external forces, it olds ( ) u ρ u = ρ t + u u = σ in In our case te Caucy stress tensor as te following form { σ f in \ t σ = σ f + σ s in t
12 FE Codimension 0 Codimension 1 Case: m = d From conservation of momenta, in absence of external forces, it olds ( ) u ρ u = ρ t + u u = σ in In our case te Caucy stress tensor as te following form { σ f in \ t σ = σ f + σ s in t Incompressible fluid: σ = σ f = pi + µ( u + ( u) T ) Visco-elastic material: σ = σ f + σ s wit σ s elastic part of te stress
13 FE Codimension 0 Codimension 1 Case: m = d From conservation of momenta, in absence of external forces, it olds ( ) u ρ u = ρ t + u u = σ in In our case te Caucy stress tensor as te following form { σ f in \ t σ = σ f + σ s in t Incompressible fluid: σ = σ f = pi + µ( u + ( u) T ) Visco-elastic material: σ = σ f + σ s wit σ s elastic part of te stress Moreover, if te structural material as a density ρ s different from te fluid density ρ f, we ave { ρ f in \ t ρ = ρ s in t
14 FE Codimension 0 Codimension 1 ρ f Virtual work principle u vdx + σ f : vdx σ f n vda = (ρ s ρ f ) u vdx σ s : vdx, t t v
15 FE Codimension 0 Codimension 1 ρ f Virtual work principle u vdx + σ f : vdx σ f n vda = (ρ s ρ f ) u vdx σ s : vdx, t t Te elastic stress σ s can be expressed in Lagrangian variables by means of te Piola-Kircoff stress tensor by: so tat ρ f P(s, t) = F(s, t) σ s (X(s, t), t)f T (s, t), u vdx + = (ρ s ρ f ) σ f : vdx t u vdx σ f n vda s P : s v(x(s, t)) ds v v
16 FE Codimension 0 Codimension 1 Using te Lagrangian description in te solid domain, te material derivative is te same as te time derivative, ence u = 2 X/ t 2. ρ f uvdx + σ f : v dx = (ρ s ρ f ) 2 X v(x(s, t)ds t2 P : s v(x(s, t)) ds
17 FE Codimension 0 Codimension 1 Using te Lagrangian description in te solid domain, te material derivative is te same as te time derivative, ence u = 2 X/ t 2. ρ f uvdx + σ f : v dx = (ρ s ρ f ) 2 X v(x(s, t)ds t2 At te end, after integration by parts, P : s v(x(s, t)) ds 2 X (ρ u σ f )v dx = (ρ s ρ f ) v(x(s, t)ds t2 + ( s P) v(x(s, t)) ds PN v(x(s, t)) da
18 FE Codimension 0 Codimension 1 From Lagrangian to Eulerian variables Implicit cange of variables using te Dirac delta function v(x(s, t)) = v(x)δ(x X(s, t)) dx
19 FE Codimension 0 Codimension 1 From Lagrangian to Eulerian variables Implicit cange of variables using te Dirac delta function v(x(s, t)) = v(x)δ(x X(s, t)) dx 2 X (ρ u σ f ) v dx = (ρ s ρ f ) v(x(s, t)ds t2 + ( s P) v(x(s, t)) ds PN v(x(s, t)) da
20 FE Codimension 0 Codimension 1 From Lagrangian to Eulerian variables Implicit cange of variables using te Dirac delta function v(x(s, t)) = v(x)δ(x X(s, t)) dx 2 X (ρ u σ f ) v dx = (ρ s ρ f ) v(x(s, t)ds t2 + ( s P) v(x(s, t)) ds PN v(x(s, t)) da substitute v(x(s, t)) 2 ( ) X = (ρ s ρ f ) t 2 v(x)δ(x X(s, t)) dx ds ( ) + ( s P) v(x)δ(x X(s, t)) dx ds ( ) PN v(x)δ(x X(s, t)) dx da
21 FE Codimension 0 Codimension 1 (ρ u σ f ) v dx 2 ( ) X = (ρ s ρ f ) t 2 v(x)δ(x X(s, t)) dx ds ( ) + ( s P) v(x)δ(x X(s, t)) dx ds ( ) PN v(x)δ(x X(s, t)) dx da
22 FE Codimension 0 Codimension 1 (ρ u σ f ) v dx 2 ( ) X = (ρ s ρ f ) t 2 v(x)δ(x X(s, t)) dx ds ( ) + ( s P) v(x)δ(x X(s, t)) dx ds ( ) PN v(x)δ(x X(s, t)) dx da and cange te order of te integrals 2 X = (ρ s ρ f ) δ(x X(s, t)) ds v dx t2 + ( s P)δ(x X(s, t)) ds v dx PNδ(x X(s, t)) da v dx
23 FE Codimension 0 Codimension 1 Since v is arbitrary, we get 2 X ρ u σ f = (ρ s ρ f ) δ(x X(s, t)) ds t2 + s Pδ(x X(s, t)) ds PNδ(x X(s, t)) da
24 FE Codimension 0 Codimension 1 Since v is arbitrary, we get 2 X ρ u σ f = (ρ s ρ f ) δ(x X(s, t)) ds t2 + s Pδ(x X(s, t)) ds PNδ(x X(s, t)) da Te source term can be split into tree contributions: excess Lagrangian mass density 2 X d(x, t) = (ρ s ρ f ) δ(x X(s, t)) ds t2 inner force density g(x, t) = s P(s, t)δ(x(s, t) x) ds and transmission force density t(x, t) = P(s, t)n(s)δ(x(s, t) x) ds
25 FE Codimension 0 Codimension 1 Strong Navier Stokes ( ) u ρ t + u u µ u + p = d + g + t in ]0, T [ div u = 0 in ]0, T [ Excess of Lagrangian mass and force densities in ]0, T [ 2 X d(x, t) = (ρ s ρ f ) δ(x X(s, t)) ds t2 g(x, t) = s P(s, t)δ(x X(s, t))ds t(x, t) = P(s, t)n(s)δ(x X(s, t))ds structure motion X (s, t) = u(x(s, t), t) in ]0, T [ t Initial and condition
26 FE Codimension 0 Codimension 1 ρ f u vdx + = (ρ s ρ f ) t t s ts/2 Case: m = d 1 Te domain occupied by te structure is t ] t s /2, t s /2[. Te pysical quantities depend only on te variables wic represent a middle section and are constant in te direction ortogonal to it. σ f : vdx t s/2 t u vd xdτ σ f n vda ts/2 t s/2 t σ s : vd xdτ
27 FE Codimension 0 Codimension 1 ρ f u vdx + = (ρ s ρ f ) t t s ts/2 Case: m = d 1 Te domain occupied by te structure is t ] t s /2, t s /2[. Te pysical quantities depend only on te variables wic represent a middle section and are constant in te direction ortogonal to it. σ f : vdx t s/2 t u vd xdτ = (ρ s ρ f )t s t u vd x t s σ f n vda ts/2 t s/2 t σ s : vd x, t σ s : vd xdτ
28 FE Codimension 0 Codimension 1 Working as before, we arrive at ρ f u σ f = (ρ s ρ f )t s + t s t s s Pδ(x X(σ, t))ds 2 X δ(x X(σ, t))ds t2 PNδ(x X(σ, t))da.
29 FE Codimension 0 Codimension 1 Working as before, we arrive at ρ f u σ f = (ρ s ρ f )t s + t s t s s Pδ(x X(σ, t))ds 2 X δ(x X(σ, t))ds t2 PNδ(x X(σ, t))da. Excess of Lagrangian mass and force densities in ]0, T [ 2 X d(x, t) = (ρ s ρ f )t s δ(x X(s, t)) ds t2 g(x, t) = t s s P(s, t)δ(x X(s, t))ds t(x, t) = t s P(s, t)n(s)δ(x X(s, t))da N: if is a closed curve in 2D or a closed surface in 3D ten is empty and te transmission force density τ vanises.
30 FE Codimension 0 Codimension 1 Strong Navier Stokes ( ) u ρ t + u u µ u + p = d + g + t in ]0, T [ div u = 0 in ]0, T [ Excess of Lagrangian mass and force densities in ]0, T [ 2 X d(x, t) = δρ δ(x X(s, t)) ds t2 g(x, t) = s P(s, t)δ(x X(s, t))ds t(x, t) = P(s, t)n(s)δ(x X(s, t))da δρ = { ρs ρ f if m = d (ρ s ρ f )t s if m = d 1 P = { P if m = d t s P if m = d 1. structure motion X (s, t) = u(x(s, t), t) in ]0, T [
31 FE Navier Stokes d ρ f (u(t), v) + a(u(t), v) + b(u(t), u(t), v) (div v, p(t)) dt 2 X = δρ v(x(s, t))ds+ < F(t), v > t2 v H0 1()d (div u(t), q) = 0 q L 2 0 () F(t), v = P(F(s, t)) : s v(x(s, t)) ds v H0 1 () d X (s, t) = u(x(s, t), t) t s u(x, 0) = u 0 (x) x, X(s, 0) = X 0 (s) s. a(u, v) = µ( u, v) b(u, v, w) = ρ f 2 ((u v, w) (u w, v))
32 FE Equivalence wit standard Te definition of g and t implies tat m = d g(x, t) = 0 for x t, t(x, t) = 0 for x t. Recall tat u(x(s, t), t) = 2 X. Ten te given Navier-Stokes t2 equations are equivalent to: ( ) u f ρ f t + uf u f σ f = 0 in ( \ t ) ]0, T [ ( ) u s ρ s t + us u s σ s f σs s = 0 in t ]0, T [ u f = u s on t ]0, T [ σ f f nf + σ s f ns = t (= F 1 PN) on t ]0, T [
33 FE Equivalence wit standard m = d 1 + t ( ) u ρ f t + u u µ u + p = 0 in ( + ) ]0, T [ u = 0 in ( + ) ]0, T [. ( [[ ]] u µ + [[p]]n n u = X t u + = u ) on t F = (ρ s ρ f )t s 2 X t 2 + t s s P on.
34 FE Incompressible and viscous yper-elastic materials X(t) t Trajectory of a material point X : [0, T ] t Deformation gradient F(s, t) = X (s, t) s Wide class of elastic materials are caracterized by: potential energy density W (F(s, t)) total elastic potential energy E (X(t)) = W (F(s, t))ds Piola-Kircoff stress tensor P(s, t) = W (s, t) ( F ) W inner force density s P(s, t) = s (F(s, t)) F
35 FE Recalling tat it olds X (s, t) = u(x(s, t), t) t s <offi Cavallini G. 10> ρ f 2 d dt u(t) 2 0 +µ u(t) d dt E(X(t))+ 1 2 δρ d dt X t 2 = 0 were E is te total elastic potential energy E (X(t)) = W (F(s, t)) ds
36 FE Fluid - Structure coupling Let t = f t s t be a time dependent region, wit f t fluid region, s t solid region in f t : incompressible Navier-Stokes equations wit Eulerian or ALE unknowns: velocity u and pressure p in s t: elastodynamics equation wit Lagrangian unknown: structure displacement η coupled troug transmission condition on Σ t = s t f t : continuity of velocities and stresses between fluid and structure
37 FE strategies for coupled problems Two approaces: <Matties-Niekamp 03> <Matties-Niekamp-Steindorf 06> Strongly coupled or monolitical Direct solution of te coupled problem. Stable but requires te solution of a big nonlinear problem. Weakly coupled or partitioned Separate solution of fluid and solid equations iteratively. Considerable reduction of computational cost, but undesirable instability effects.
38 FE Added-mass and partitioned procedure In coupled, te fluid acts over te structure as an added-mass at te interface. Wen ρ s ρ f (ρ s and ρ f solid and fluid density) te added-mass effect is negligible and standard partitioned procedures converge in few iterations. Te fails to converge wen ρ s /ρ f 1. <Nobile 01, Causin-Gerbeau-Nobile 05> Different strategies ave been proposed based on fully coupled implicit algoritms solved via iterative solvers using domain decomposition or algebraic splitting: <Le Tallec-Mouro 01, Deparis-Fernández-Formaggia 03> <adia-nobile-vergara 08, Giorda-Nobile-Vergara 09> <adia-quaini-quarteroni 08-09> or based on time-discretization via operator splitting: <Guidoboni-Glowinski-Cavallini-Canic 09>
39 FE Uniform background grid T for te domain (messize x ) Finite element approximation
40 FE Uniform background grid T for te domain (messize x ) Inf-sup stable finite element pair Finite element approximation V = {v H0 1()d : v Q2} Q = {q L 2 0 () : q P1}
41 FE Uniform background grid T for te domain (messize x ) Inf-sup stable finite element pair Finite element approximation V = {v H0 1()d : v Q2} Q = {q L 2 0 () : q P1} Grid S for (messize s )
42 FE Uniform background grid T for te domain (messize x ) Inf-sup stable finite element pair Finite element approximation V = {v H0 1()d : v Q2} Q = {q L 2 0 () : q P1} Grid S for (messize s ) Piecewise linear finite element space for X S = {Y C 0 (; ) : Y P1}
43 FE Uniform background grid T for te domain (messize x ) Inf-sup stable finite element pair Finite element approximation V = {v H0 1()d : v Q2} Q = {q L 2 0 () : q P1} Grid S for (messize s ) Piecewise linear finite element space for X S = {Y C 0 (; ) : Y P1} Notation T k, k = 1,..., M e elements of S s j, j = 1,..., M vertices of S E set of te edges e of S
44 FE Source term: F(t), v = Discrete source term P(F (s, t)) : s v(x (s, t)) ds v V
45 FE Source term: F(t), v = Discrete source term P(F (s, t)) : s v(x (s, t)) ds v V X p.w. linear F, P p.w. constant
46 FE Source term: F(t), v = Discrete source term P(F (s, t)) : s v(x (s, t)) ds v V X p.w. linear F, P p.w. constant y integration by parts M e F (t), v = P : s v(x(s, t)) ds T k k=1 M e = P Nv(X(s, t)) da T k k=1
47 [[P]] = P + N + + P N jump of P across e for internal edges [[P]] = PN jump wen e FE Source term: F(t), v = Discrete source term P(F (s, t)) : s v(x (s, t)) ds v V X p.w. linear F, P p.w. constant y integration by parts M e F (t), v = P : s v(x(s, t)) ds T k k=1 M e = P Nv(X(s, t)) da T k k=1 tat is F (t), v = [[P ]] v(x(s, t)) da e E e
48 FE Te semidiscrete problem becomes: find (u, p ) : ]0, T [ V Q and X : [0, T ] S suc tat d ρ f dt (u (t), v) + a(u (t), v) + b(u (t), u (t), v) dx i (div v, p (t)) = δρ [[P ]] v(x (s, t))da e E (div u (t), q) = 0 (t) = u (X i (t), t) dt u (0) = u 0 in X i (0) = X 0 (s i ) e i = 1,..., M 2 X t 2 v(x (s, t))ds i = 1,..., M v V q Q
49 FE Semidiscrete stability <offi Cavallini G. 10> ρ d 2 dt u (t) µ u (t) d dt E(X (t)) δρ d X 2 dt t = 0.
50 FE Fully discrete problem ackward Euler E Find (u n+1, p n+1 ) V Q e X n+1 S suc tat F n+1, v = [[P ]] n+1 v(x n+1 (s))da v V e E e NS ( u n+1 u n ρ f, v t (div v, p n+1 δρ ) ) = X n+1 + a(u n+1, v) + b(u n+1, u n+1, v) 2X n + Xn 1 t 2 v(x n+1 (s))ds + < F n+1, v > v V (div u n+1, q) = 0 q Q ; X n+1 i X n i t = u n+1 (X n+1 i ) i = 1,..., M.
51 FE Step 1. F n, v = e E Fully discrete problem Modified bckward Euler ME e [[P ]] n v(x n (s, t)) da v V Step 2. find (u n+1, p n+1 ) V Q suc tat ( ) u n+1 u n ρ f, v + a(u n+1 t, v) + b(u n+1, u n+1, v) (div v, p n+1 ) = NS X n+1 2X n δρ + Xn 1 t 2 v(x n (s))ds + F n, v v V (div u n+1, q) = 0 q Q ; Step 3. Xn+1 i X n i t = u n+1 (X n i ) i = 1,..., M.
52 FE Using Step 3 in Step 2 we arrive at: Step 1. F n, v = [[P ]] n v(x n (s, t)) da v e E e V Step 2. find (u n+1, p n+1 ) V Q suc tat ( ) u n+1 u n ρ f, v + a(u n+1 t, v) + b(u n+1, u n+1, v) (div v, p n+1 ) = NS u n+1 (X n δρ (s)) un (Xn 1 (s)) v(x n t (s))ds + F n, v v V (div u n+1, q) = 0 q Q ; Step 3. Xn+1 i X n i t = u n+1 (X n i ) i = 1,..., M.
53 FE Discrete Energy Estimate <offi Cavallini G. 10> Assumption Set H iαjβ = 2 W (F) F iα F jβ Tere exist κ min > 0 and κ max > 0 s.t. for all tensors E κ min E 2 E : H : E κ max E 2 Artificial Viscosity Teorem Let u n, pn and Xn be a solution to te FE-IM. Let Σ n be te sum of te kinetic and elastic energy: Σ n = ρ f 2 un 2 0, + δρ 2 X n X n 1 t 2 0, + E [X n ]. Ten Σ n+1 Σ n + (µ + µ a ) u n CFL Condition: µ + µ a > 0
54 FE E is unconditionally stable, wile ME requires te term µ a to be not too large µ a = κ max C (m 2) s (d 1) x t L n space dim. solid dim. 2 1 L n t C x s 2 2 L n t C x 3 2 L n t L n t Cx/ 2 s
55 FE = ]0, 1[ ]0, 1[, = [0, L] ρ s = ρ f P = κ X s experiments parameters partitioned into 16 by 16 subsquares discretized by 618 uniformly spaced nodes t =.01 V continuous piecewise biquadratics Q 2 Q discontinuous piecewise linears P 1 S continuous piecewise linears Programs written in C++ wit te support of deal.ii libraries. Pictures and movies obtained wit Matlab and IM Opendx.
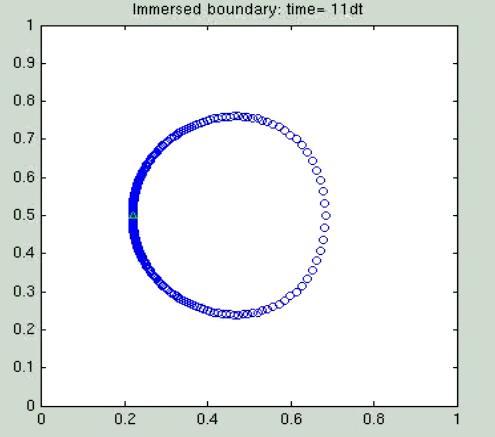
56 FE Ellipse immersed in a static fluid Aim: to examine te influence of te elastic force of te immersed on te wole system. Fluid initially at rest: u 0 = 0 ( 0.2 cos(2πs) X 0 (s) = 0.1 sin(2πs) ) s [0, 1], : time=0dt : time= 100dt
57 FE Percentage of area loss at t=2. M N = N = N = N =
58 FE Structure model: Inflated baloon in a fluid at rest F (t), v = κ L Initial condition: ( R cos(s/r) X 0 (s) = R sin(s/r) Analytical solution: 0 2 X (s, t) s 2 v(x (s, t)) ds, κ = 1 ), s [0, 2πR] R = 0.4. u(x, t) = 0 x, t ]0, T [ p(x, t) = { κ(1/r πr), x R κπr, x > R t ]0, T [.

59 p FE Q2/P1 d solution Uniform grid: squares, t = 0.005, T = 3s Pressure on te cutline y= p p x Figure: Pressure Figure: Pressure cutline

60 FE P1isoP2/P1 c and P1isoP2/P1 c +P0 solutions Uniform grid: squares squares divided into two triangles t = , T = 0.1s Pressure P1isoP2/P1 c Pressure P1isoP2/P1 c +P0
61 FE P1isoP2/P1 c versus P1isoP2/P1 c +P0 cutline Uniform grid: squares divided into two triangles pressure q P1+P0 q P1 analytical 2
62 FE Area loss Uniform grid: squares divided into two triangles 1.2 x q P1 q (P1+P0) 1 A/A time

63 FE Examples of instability
64 FE Plot: µ a VS Σ n for different µ and t ρ f = 1, ρ s = 2, κ = 1, N=64, M=1024, 10 1 analysis η n Energy µ a = κc t s x L n 10 1 η n Energy µ = time time t = 10 1 t = η n 10 1 η n Energy Energy µ = time time
65 FE analysis for different ρ s ρ f = 1, µ = 0.1, κ = 1, N=64, M=1024, 10 1 η n Energy 10 1 η n Energy 10 1 η n Energy time time time 10 1 ρ s = 11 η n 10 1 ρ s = 1.1 η n 10 1 ρ s = 0.9 η n Energy Energy Energy time time time ρ s = 0.8 ρ s = 0.4 ρ s = 0.2








66 FE Some numerical experiments Equal densities Original 2D code in Fortran 77, ported to DEAL.II (c ++ ) ( by L. Heltai Rectangular mes, 2D - Codimension 1 Q2/P1 d 2D - Codimension 0 3D - Codimension 1

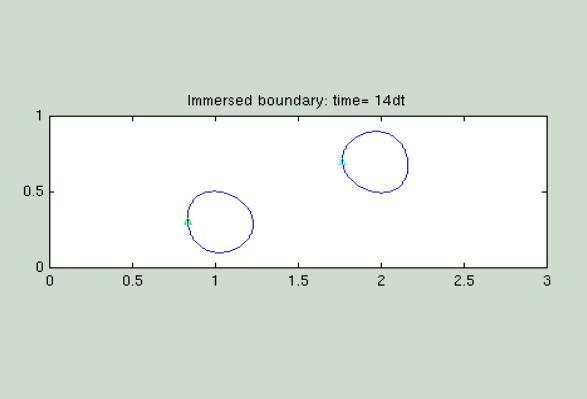
67 FE Some numerical experiments Different densities Original 2D code in Fortran 90 by N. Cavallini Triangular mes P1isoP2/P1 c Inflated balloon falling down in a liquid Densities: ρ s = 21 and ρ f = 1 κ = 1 κ = 0.1 κ = 0.1 κ = 1 κ = 0.1
68 FE Te is extended to te treatment of tick materials modeled by viscous-yper-elastic constitutive laws. Te case of fluid and structure wit different densities as been also considered. Te finite element approac is efficient and can easily andle te case of tick materials. analysis of te partitioned space-time discretization is provided. Te does not depend on te values of ρ f and of ρ s.
Advances in the mathematical theory of the finite element immersed boundary method
 Advances in the mathematical theory of the finite element immersed boundary method Daniele Boffi Dipartimento di Matematica F. Casorati, Università di Pavia http://www-dimat.unipv.it/boffi May 12, 2014
Advances in the mathematical theory of the finite element immersed boundary method Daniele Boffi Dipartimento di Matematica F. Casorati, Università di Pavia http://www-dimat.unipv.it/boffi May 12, 2014
Approximation of fluid-structure interaction problems with Lagrange multiplier
 Approximation of fluid-structure interaction problems with Lagrange multiplier Daniele Boffi Dipartimento di Matematica F. Casorati, Università di Pavia http://www-dimat.unipv.it/boffi May 30, 2016 Outline
Approximation of fluid-structure interaction problems with Lagrange multiplier Daniele Boffi Dipartimento di Matematica F. Casorati, Università di Pavia http://www-dimat.unipv.it/boffi May 30, 2016 Outline
FSI with Application in Hemodynamics Analysis and Simulation
 FSI with Application in Hemodynamics Analysis and Simulation Mária Lukáčová Institute of Mathematics, University of Mainz A. Hundertmark (Uni-Mainz) Š. Nečasová (Academy of Sciences, Prague) G. Rusnáková
FSI with Application in Hemodynamics Analysis and Simulation Mária Lukáčová Institute of Mathematics, University of Mainz A. Hundertmark (Uni-Mainz) Š. Nečasová (Academy of Sciences, Prague) G. Rusnáková
Consiglio Nazionale delle Ricerche. Istituto di Matematica Applicata e Tecnologie Informatiche PUBBLICAZIONI
 Consiglio Nazionale delle Ricerche Istituto di Matematica Applicata e Tecnologie Informatiche PUBBLICAZIONI D. Boffi, L. Gastaldi, L. Heltai, C.S. Peskin A NOTE ON THE HYPER-ELASTIC FORMULATION OF THE
Consiglio Nazionale delle Ricerche Istituto di Matematica Applicata e Tecnologie Informatiche PUBBLICAZIONI D. Boffi, L. Gastaldi, L. Heltai, C.S. Peskin A NOTE ON THE HYPER-ELASTIC FORMULATION OF THE
Introduction to immersed boundary method
 Introduction to immersed boundary method Ming-Chih Lai mclai@math.nctu.edu.tw Department of Applied Mathematics Center of Mathematical Modeling and Scientific Computing National Chiao Tung University 1001,
Introduction to immersed boundary method Ming-Chih Lai mclai@math.nctu.edu.tw Department of Applied Mathematics Center of Mathematical Modeling and Scientific Computing National Chiao Tung University 1001,
Numerical Simulations of the Fluid-Structure Coupling in Physiological Vessels Mini-Workshop I
 Numerical Simulations of the Fluid-Structure Coupling in Physiological Vessels INRIA Rocquencourt, projet REO miguel.fernandez@inria.fr CRM Spring School, Montréal May 16, 2005 Motivations It is generally
Numerical Simulations of the Fluid-Structure Coupling in Physiological Vessels INRIA Rocquencourt, projet REO miguel.fernandez@inria.fr CRM Spring School, Montréal May 16, 2005 Motivations It is generally
Gradient Descent etc.
 1 Gradient Descent etc EE 13: Networked estimation and control Prof Kan) I DERIVATIVE Consider f : R R x fx) Te derivative is defined as d fx) = lim dx fx + ) fx) Te cain rule states tat if d d f gx) )
1 Gradient Descent etc EE 13: Networked estimation and control Prof Kan) I DERIVATIVE Consider f : R R x fx) Te derivative is defined as d fx) = lim dx fx + ) fx) Te cain rule states tat if d d f gx) )
1. Introduction. We consider the model problem: seeking an unknown function u satisfying
 A DISCONTINUOUS LEAST-SQUARES FINITE ELEMENT METHOD FOR SECOND ORDER ELLIPTIC EQUATIONS XIU YE AND SHANGYOU ZHANG Abstract In tis paper, a discontinuous least-squares (DLS) finite element metod is introduced
A DISCONTINUOUS LEAST-SQUARES FINITE ELEMENT METHOD FOR SECOND ORDER ELLIPTIC EQUATIONS XIU YE AND SHANGYOU ZHANG Abstract In tis paper, a discontinuous least-squares (DLS) finite element metod is introduced
NUMERICAL SIMULATION OF FLUID-STRUCTURE INTERACTION PROBLEMS WITH DYNAMIC FRACTURE
 NUMERICAL SIMULATION OF FLUID-STRUCTURE INTERACTION PROBLEMS WITH DYNAMIC FRACTURE Kevin G. Wang (1), Patrick Lea (2), and Charbel Farhat (3) (1) Department of Aerospace, California Institute of Technology
NUMERICAL SIMULATION OF FLUID-STRUCTURE INTERACTION PROBLEMS WITH DYNAMIC FRACTURE Kevin G. Wang (1), Patrick Lea (2), and Charbel Farhat (3) (1) Department of Aerospace, California Institute of Technology
Poisson Equation in Sobolev Spaces
 Poisson Equation in Sobolev Spaces OcMountain Dayligt Time. 6, 011 Today we discuss te Poisson equation in Sobolev spaces. It s existence, uniqueness, and regularity. Weak Solution. u = f in, u = g on
Poisson Equation in Sobolev Spaces OcMountain Dayligt Time. 6, 011 Today we discuss te Poisson equation in Sobolev spaces. It s existence, uniqueness, and regularity. Weak Solution. u = f in, u = g on
Math Spring 2013 Solutions to Assignment # 3 Completion Date: Wednesday May 15, (1/z) 2 (1/z 1) 2 = lim
 2 (1/z 1) 2 = lim") Mat 311 - Spring 013 Solutions to Assignment # 3 Completion Date: Wednesday May 15, 013 Question 1. [p 56, #10 (a)] 4z Use te teorem of Sec. 17 to sow tat z (z 1) = 4. We ave z 4z (z 1) = z 0 4 (1/z) (1/z
Mat 311 - Spring 013 Solutions to Assignment # 3 Completion Date: Wednesday May 15, 013 Question 1. [p 56, #10 (a)] 4z Use te teorem of Sec. 17 to sow tat z (z 1) = 4. We ave z 4z (z 1) = z 0 4 (1/z) (1/z
Higher Derivatives. Differentiable Functions
 Calculus 1 Lia Vas Higer Derivatives. Differentiable Functions Te second derivative. Te derivative itself can be considered as a function. Te instantaneous rate of cange of tis function is te second derivative.
Calculus 1 Lia Vas Higer Derivatives. Differentiable Functions Te second derivative. Te derivative itself can be considered as a function. Te instantaneous rate of cange of tis function is te second derivative.
A unifying model for fluid flow and elastic solid deformation: a novel approach for fluid-structure interaction and wave propagation
 A unifying model for fluid flow and elastic solid deformation: a novel approach for fluid-structure interaction and wave propagation S. Bordère a and J.-P. Caltagirone b a. CNRS, Univ. Bordeaux, ICMCB,
A unifying model for fluid flow and elastic solid deformation: a novel approach for fluid-structure interaction and wave propagation S. Bordère a and J.-P. Caltagirone b a. CNRS, Univ. Bordeaux, ICMCB,
Preconditioning in H(div) and Applications
 and Applications") 1 Preconditioning in H(div) and Applications Douglas N. Arnold 1, Ricard S. Falk 2 and Ragnar Winter 3 4 Abstract. Summarizing te work of [AFW97], we sow ow to construct preconditioners using domain decomposition
1 Preconditioning in H(div) and Applications Douglas N. Arnold 1, Ricard S. Falk 2 and Ragnar Winter 3 4 Abstract. Summarizing te work of [AFW97], we sow ow to construct preconditioners using domain decomposition
Stability and convergence analysis of the kinematically coupled scheme for the fluid-structure interaction
 Stability and convergence analysis of the kinematically coupled scheme for the fluid-structure interaction Boris Muha Department of Mathematics, Faculty of Science, University of Zagreb 2018 Modeling,
Stability and convergence analysis of the kinematically coupled scheme for the fluid-structure interaction Boris Muha Department of Mathematics, Faculty of Science, University of Zagreb 2018 Modeling,
Chapter 2. General concepts. 2.1 The Navier-Stokes equations
 Chapter 2 General concepts 2.1 The Navier-Stokes equations The Navier-Stokes equations model the fluid mechanics. This set of differential equations describes the motion of a fluid. In the present work
Chapter 2 General concepts 2.1 The Navier-Stokes equations The Navier-Stokes equations model the fluid mechanics. This set of differential equations describes the motion of a fluid. In the present work
A method of Lagrange Galerkin of second order in time. Une méthode de Lagrange Galerkin d ordre deux en temps
 A metod of Lagrange Galerkin of second order in time Une métode de Lagrange Galerkin d ordre deux en temps Jocelyn Étienne a a DAMTP, University of Cambridge, Wilberforce Road, Cambridge CB3 0WA, Great-Britain.
A metod of Lagrange Galerkin of second order in time Une métode de Lagrange Galerkin d ordre deux en temps Jocelyn Étienne a a DAMTP, University of Cambridge, Wilberforce Road, Cambridge CB3 0WA, Great-Britain.
An arbitrary lagrangian eulerian discontinuous galerkin approach to fluid-structure interaction and its application to cardiovascular problem
 An arbitrary lagrangian eulerian discontinuous galerkin approach to fluid-structure interaction and its application to cardiovascular problem Yifan Wang University of Houston, Department of Mathematics
An arbitrary lagrangian eulerian discontinuous galerkin approach to fluid-structure interaction and its application to cardiovascular problem Yifan Wang University of Houston, Department of Mathematics
On convergence of the immersed boundary method for elliptic interface problems
 On convergence of te immersed boundary metod for elliptic interface problems Zilin Li January 26, 2012 Abstract Peskin s Immersed Boundary (IB) metod is one of te most popular numerical metods for many
On convergence of te immersed boundary metod for elliptic interface problems Zilin Li January 26, 2012 Abstract Peskin s Immersed Boundary (IB) metod is one of te most popular numerical metods for many
Mass Lumping for Constant Density Acoustics
 Lumping 1 Mass Lumping for Constant Density Acoustics William W. Symes ABSTRACT Mass lumping provides an avenue for efficient time-stepping of time-dependent problems wit conforming finite element spatial
Lumping 1 Mass Lumping for Constant Density Acoustics William W. Symes ABSTRACT Mass lumping provides an avenue for efficient time-stepping of time-dependent problems wit conforming finite element spatial
Crouzeix-Velte Decompositions and the Stokes Problem
 Crouzeix-Velte Decompositions and te Stokes Problem PD Tesis Strauber Györgyi Eötvös Loránd University of Sciences, Insitute of Matematics, Matematical Doctoral Scool Director of te Doctoral Scool: Dr.
Crouzeix-Velte Decompositions and te Stokes Problem PD Tesis Strauber Györgyi Eötvös Loránd University of Sciences, Insitute of Matematics, Matematical Doctoral Scool Director of te Doctoral Scool: Dr.
NUMERICAL SIMULATION OF INTERACTION BETWEEN INCOMPRESSIBLE FLOW AND AN ELASTIC WALL
 Proceedings of ALGORITMY 212 pp. 29 218 NUMERICAL SIMULATION OF INTERACTION BETWEEN INCOMPRESSIBLE FLOW AND AN ELASTIC WALL MARTIN HADRAVA, MILOSLAV FEISTAUER, AND PETR SVÁČEK Abstract. The present paper
Proceedings of ALGORITMY 212 pp. 29 218 NUMERICAL SIMULATION OF INTERACTION BETWEEN INCOMPRESSIBLE FLOW AND AN ELASTIC WALL MARTIN HADRAVA, MILOSLAV FEISTAUER, AND PETR SVÁČEK Abstract. The present paper
6. Non-uniform bending
 . Non-uniform bending Introduction Definition A non-uniform bending is te case were te cross-section is not only bent but also seared. It is known from te statics tat in suc a case, te bending moment in
. Non-uniform bending Introduction Definition A non-uniform bending is te case were te cross-section is not only bent but also seared. It is known from te statics tat in suc a case, te bending moment in
FVM for Fluid-Structure Interaction with Large Structural Displacements
 FVM for Fluid-Structure Interaction with Large Structural Displacements Željko Tuković and Hrvoje Jasak Zeljko.Tukovic@fsb.hr, h.jasak@wikki.co.uk Faculty of Mechanical Engineering and Naval Architecture
FVM for Fluid-Structure Interaction with Large Structural Displacements Željko Tuković and Hrvoje Jasak Zeljko.Tukovic@fsb.hr, h.jasak@wikki.co.uk Faculty of Mechanical Engineering and Naval Architecture
1 Calculus. 1.1 Gradients and the Derivative. Q f(x+h) f(x)
 f(x)") Calculus. Gradients and te Derivative Q f(x+) δy P T δx R f(x) 0 x x+ Let P (x, f(x)) and Q(x+, f(x+)) denote two points on te curve of te function y = f(x) and let R denote te point of intersection of
Calculus. Gradients and te Derivative Q f(x+) δy P T δx R f(x) 0 x x+ Let P (x, f(x)) and Q(x+, f(x+)) denote two points on te curve of te function y = f(x) and let R denote te point of intersection of
Finding and Using Derivative The shortcuts
 Calculus 1 Lia Vas Finding and Using Derivative Te sortcuts We ave seen tat te formula f f(x+) f(x) (x) = lim 0 is manageable for relatively simple functions like a linear or quadratic. For more complex
Calculus 1 Lia Vas Finding and Using Derivative Te sortcuts We ave seen tat te formula f f(x+) f(x) (x) = lim 0 is manageable for relatively simple functions like a linear or quadratic. For more complex
= h. Geometrically this quantity represents the slope of the secant line connecting the points
 Section 3.7: Rates of Cange in te Natural and Social Sciences Recall: Average rate of cange: y y y ) ) ), ere Geometrically tis quantity represents te slope of te secant line connecting te points, f (
Section 3.7: Rates of Cange in te Natural and Social Sciences Recall: Average rate of cange: y y y ) ) ), ere Geometrically tis quantity represents te slope of te secant line connecting te points, f (
Extended Finite Elements method for fluid-structure interaction with an immersed thick non-linear structure
 MOX-Report No. 26/2018 Extended Finite Elements metod for fluid-structure interaction wit an immersed tick non-linear structure Vergara, C.; Zonca, S. MOX, Dipartimento di Matematica Politecnico di Milano,
MOX-Report No. 26/2018 Extended Finite Elements metod for fluid-structure interaction wit an immersed tick non-linear structure Vergara, C.; Zonca, S. MOX, Dipartimento di Matematica Politecnico di Milano,
Chapter 5 FINITE DIFFERENCE METHOD (FDM)
") MEE7 Computer Modeling Tecniques in Engineering Capter 5 FINITE DIFFERENCE METHOD (FDM) 5. Introduction to FDM Te finite difference tecniques are based upon approximations wic permit replacing differential
MEE7 Computer Modeling Tecniques in Engineering Capter 5 FINITE DIFFERENCE METHOD (FDM) 5. Introduction to FDM Te finite difference tecniques are based upon approximations wic permit replacing differential
Prediction of Coating Thickness
 Prediction of Coating Tickness Jon D. Wind Surface Penomena CE 385M 4 May 1 Introduction Tis project involves te modeling of te coating of metal plates wit a viscous liquid by pulling te plate vertically
Prediction of Coating Tickness Jon D. Wind Surface Penomena CE 385M 4 May 1 Introduction Tis project involves te modeling of te coating of metal plates wit a viscous liquid by pulling te plate vertically
Order of Accuracy. ũ h u Ch p, (1)
") Order of Accuracy 1 Terminology We consider a numerical approximation of an exact value u. Te approximation depends on a small parameter, wic can be for instance te grid size or time step in a numerical
Order of Accuracy 1 Terminology We consider a numerical approximation of an exact value u. Te approximation depends on a small parameter, wic can be for instance te grid size or time step in a numerical
Euler Equations: local existence
 Euler Equations: local existence Mat 529, Lesson 2. 1 Active scalars formulation We start with a lemma. Lemma 1. Assume that w is a magnetization variable, i.e. t w + u w + ( u) w = 0. If u = Pw then u
Euler Equations: local existence Mat 529, Lesson 2. 1 Active scalars formulation We start with a lemma. Lemma 1. Assume that w is a magnetization variable, i.e. t w + u w + ( u) w = 0. If u = Pw then u
ERROR BOUNDS FOR THE METHODS OF GLIMM, GODUNOV AND LEVEQUE BRADLEY J. LUCIER*
 EO BOUNDS FO THE METHODS OF GLIMM, GODUNOV AND LEVEQUE BADLEY J. LUCIE* Abstract. Te expected error in L ) attimet for Glimm s sceme wen applied to a scalar conservation law is bounded by + 2 ) ) /2 T
EO BOUNDS FO THE METHODS OF GLIMM, GODUNOV AND LEVEQUE BADLEY J. LUCIE* Abstract. Te expected error in L ) attimet for Glimm s sceme wen applied to a scalar conservation law is bounded by + 2 ) ) /2 T
STABILITY OF THE KINEMATICALLY COUPLED β-scheme FOR FLUID-STRUCTURE INTERACTION PROBLEMS IN HEMODYNAMICS
 INTERNATIONAL JOURNAL OF NUMERICAL ANALYSIS AND MODELING Volume 2, Number, Pages 54 8 c 25 Institute for Scientific Computing and Information STABILITY OF THE KINEMATICALLY COUPLED β-scheme FOR FLUID-STRUCTURE
INTERNATIONAL JOURNAL OF NUMERICAL ANALYSIS AND MODELING Volume 2, Number, Pages 54 8 c 25 Institute for Scientific Computing and Information STABILITY OF THE KINEMATICALLY COUPLED β-scheme FOR FLUID-STRUCTURE
IEOR 165 Lecture 10 Distribution Estimation
 IEOR 165 Lecture 10 Distribution Estimation 1 Motivating Problem Consider a situation were we ave iid data x i from some unknown distribution. One problem of interest is estimating te distribution tat
IEOR 165 Lecture 10 Distribution Estimation 1 Motivating Problem Consider a situation were we ave iid data x i from some unknown distribution. One problem of interest is estimating te distribution tat
1. Consider the trigonometric function f(t) whose graph is shown below. Write down a possible formula for f(t).
 whose graph is shown below. Write down a possible formula for f(t).") . Consider te trigonometric function f(t) wose grap is sown below. Write down a possible formula for f(t). Tis function appears to be an odd, periodic function tat as been sifted upwards, so we will use
. Consider te trigonometric function f(t) wose grap is sown below. Write down a possible formula for f(t). Tis function appears to be an odd, periodic function tat as been sifted upwards, so we will use
An Overview of Fluid Animation. Christopher Batty March 11, 2014
 An Overview of Fluid Animation Christopher Batty March 11, 2014 What distinguishes fluids? What distinguishes fluids? No preferred shape. Always flows when force is applied. Deforms to fit its container.
An Overview of Fluid Animation Christopher Batty March 11, 2014 What distinguishes fluids? What distinguishes fluids? No preferred shape. Always flows when force is applied. Deforms to fit its container.
MANY scientific and engineering problems can be
 A Domain Decomposition Metod using Elliptical Arc Artificial Boundary for Exterior Problems Yajun Cen, and Qikui Du Abstract In tis paper, a Diriclet-Neumann alternating metod using elliptical arc artificial
A Domain Decomposition Metod using Elliptical Arc Artificial Boundary for Exterior Problems Yajun Cen, and Qikui Du Abstract In tis paper, a Diriclet-Neumann alternating metod using elliptical arc artificial
A modular, operator splitting scheme for fluid-structure interaction problems with thick structures
 Numerical Analysis and Scientific Computing Preprint Seria A modular, operator splitting scheme for fluid-structure interaction problems with thick structures M. Bukač S. Čanić R. Glowinski B. Muha A.
Numerical Analysis and Scientific Computing Preprint Seria A modular, operator splitting scheme for fluid-structure interaction problems with thick structures M. Bukač S. Čanić R. Glowinski B. Muha A.
Investigating platelet motion towards vessel walls in the presence of red blood cells
 Investigating platelet motion towards vessel walls in the presence of red blood cells (Complex Fluids in Biological Systems) Lindsay Crowl and Aaron Fogelson Department of Mathematics University of Utah
Investigating platelet motion towards vessel walls in the presence of red blood cells (Complex Fluids in Biological Systems) Lindsay Crowl and Aaron Fogelson Department of Mathematics University of Utah
Polynomial Interpolation
 Capter 4 Polynomial Interpolation In tis capter, we consider te important problem of approximatinga function fx, wose values at a set of distinct points x, x, x,, x n are known, by a polynomial P x suc
Capter 4 Polynomial Interpolation In tis capter, we consider te important problem of approximatinga function fx, wose values at a set of distinct points x, x, x,, x n are known, by a polynomial P x suc
FINITE DIFFERENCE APPROXIMATIONS FOR NONLINEAR FIRST ORDER PARTIAL DIFFERENTIAL EQUATIONS
 UNIVERSITATIS IAGELLONICAE ACTA MATHEMATICA, FASCICULUS XL 2002 FINITE DIFFERENCE APPROXIMATIONS FOR NONLINEAR FIRST ORDER PARTIAL DIFFERENTIAL EQUATIONS by Anna Baranowska Zdzis law Kamont Abstract. Classical
UNIVERSITATIS IAGELLONICAE ACTA MATHEMATICA, FASCICULUS XL 2002 FINITE DIFFERENCE APPROXIMATIONS FOR NONLINEAR FIRST ORDER PARTIAL DIFFERENTIAL EQUATIONS by Anna Baranowska Zdzis law Kamont Abstract. Classical
arxiv: v1 [math.na] 28 Apr 2017
![arxiv: v1 [math.na] 28 Apr 2017](/thumbs/88/115795742.jpg "arxiv: v1 [math.na] 28 Apr 2017") THE SCOTT-VOGELIUS FINITE ELEMENTS REVISITED JOHNNY GUZMÁN AND L RIDGWAY SCOTT arxiv:170500020v1 [matna] 28 Apr 2017 Abstract We prove tat te Scott-Vogelius finite elements are inf-sup stable on sape-regular
THE SCOTT-VOGELIUS FINITE ELEMENTS REVISITED JOHNNY GUZMÁN AND L RIDGWAY SCOTT arxiv:170500020v1 [matna] 28 Apr 2017 Abstract We prove tat te Scott-Vogelius finite elements are inf-sup stable on sape-regular
Part VIII, Chapter 39. Fluctuation-based stabilization Model problem
 Part VIII, Capter 39 Fluctuation-based stabilization Tis capter presents a unified analysis of recent stabilization tecniques for te standard Galerkin approximation of first-order PDEs using H 1 - conforming
Part VIII, Capter 39 Fluctuation-based stabilization Tis capter presents a unified analysis of recent stabilization tecniques for te standard Galerkin approximation of first-order PDEs using H 1 - conforming
Numerical analysis of a free piston problem
 MATHEMATICAL COMMUNICATIONS 573 Mat. Commun., Vol. 15, No. 2, pp. 573-585 (2010) Numerical analysis of a free piston problem Boris Mua 1 and Zvonimir Tutek 1, 1 Department of Matematics, University of
MATHEMATICAL COMMUNICATIONS 573 Mat. Commun., Vol. 15, No. 2, pp. 573-585 (2010) Numerical analysis of a free piston problem Boris Mua 1 and Zvonimir Tutek 1, 1 Department of Matematics, University of
Relaxation methods and finite element schemes for the equations of visco-elastodynamics. Chiara Simeoni
 Relaxation methods and finite element schemes for the equations of visco-elastodynamics Chiara Simeoni Department of Information Engineering, Computer Science and Mathematics University of L Aquila (Italy)
Relaxation methods and finite element schemes for the equations of visco-elastodynamics Chiara Simeoni Department of Information Engineering, Computer Science and Mathematics University of L Aquila (Italy)
Sharp Korn inequalities in thin domains: The rst and a half Korn inequality
 Sarp Korn inequalities in tin domains: Te rst and a alf Korn inequality Davit Harutyunyan (University of Uta) joint wit Yury Grabovsky (Temple University) SIAM, Analysis of Partial Dierential Equations,
Sarp Korn inequalities in tin domains: Te rst and a alf Korn inequality Davit Harutyunyan (University of Uta) joint wit Yury Grabovsky (Temple University) SIAM, Analysis of Partial Dierential Equations,
Stability of the kinematically coupled β-scheme for fluid-structure interaction problems in hemodynamics
 Numerical Analysis and Scientific Computing Preprint Seria Stability of the kinematically coupled β-scheme for fluid-structure interaction problems in hemodynamics S. Čanić B. Muha M. Bukač Preprint #13
Numerical Analysis and Scientific Computing Preprint Seria Stability of the kinematically coupled β-scheme for fluid-structure interaction problems in hemodynamics S. Čanić B. Muha M. Bukač Preprint #13
Name: Answer Key No calculators. Show your work! 1. (21 points) All answers should either be,, a (finite) real number, or DNE ( does not exist ).
 All answers should either be,, a (finite) real number, or DNE ( does not exist ).") Mat - Final Exam August 3 rd, Name: Answer Key No calculators. Sow your work!. points) All answers sould eiter be,, a finite) real number, or DNE does not exist ). a) Use te grap of te function to evaluate
Mat - Final Exam August 3 rd, Name: Answer Key No calculators. Sow your work!. points) All answers sould eiter be,, a finite) real number, or DNE does not exist ). a) Use te grap of te function to evaluate
Lecture 8: Tissue Mechanics
 Computational Biology Group (CoBi), D-BSSE, ETHZ Lecture 8: Tissue Mechanics Prof Dagmar Iber, PhD DPhil MSc Computational Biology 2015/16 7. Mai 2016 2 / 57 Contents 1 Introduction to Elastic Materials
Computational Biology Group (CoBi), D-BSSE, ETHZ Lecture 8: Tissue Mechanics Prof Dagmar Iber, PhD DPhil MSc Computational Biology 2015/16 7. Mai 2016 2 / 57 Contents 1 Introduction to Elastic Materials
PDE Solvers for Fluid Flow
 PDE Solvers for Fluid Flow issues and algorithms for the Streaming Supercomputer Eran Guendelman February 5, 2002 Topics Equations for incompressible fluid flow 3 model PDEs: Hyperbolic, Elliptic, Parabolic
PDE Solvers for Fluid Flow issues and algorithms for the Streaming Supercomputer Eran Guendelman February 5, 2002 Topics Equations for incompressible fluid flow 3 model PDEs: Hyperbolic, Elliptic, Parabolic
Stability and Geometric Conservation Laws
 and and Geometric Conservation Laws Dipartimento di Matematica, Università di Pavia http://www-dimat.unipv.it/boffi Advanced Computational Methods for FSI May 3-7, 2006. Ibiza, Spain and Introduction to
and and Geometric Conservation Laws Dipartimento di Matematica, Università di Pavia http://www-dimat.unipv.it/boffi Advanced Computational Methods for FSI May 3-7, 2006. Ibiza, Spain and Introduction to
Numerical methods for the Navier- Stokes equations
 Numerical methods for the Navier- Stokes equations Hans Petter Langtangen 1,2 1 Center for Biomedical Computing, Simula Research Laboratory 2 Department of Informatics, University of Oslo Dec 6, 2012 Note:
Numerical methods for the Navier- Stokes equations Hans Petter Langtangen 1,2 1 Center for Biomedical Computing, Simula Research Laboratory 2 Department of Informatics, University of Oslo Dec 6, 2012 Note:
Space-time XFEM for two-phase mass transport
 Space-time XFEM for two-phase mass transport Space-time XFEM for two-phase mass transport Christoph Lehrenfeld joint work with Arnold Reusken EFEF, Prague, June 5-6th 2015 Christoph Lehrenfeld EFEF, Prague,
Space-time XFEM for two-phase mass transport Space-time XFEM for two-phase mass transport Christoph Lehrenfeld joint work with Arnold Reusken EFEF, Prague, June 5-6th 2015 Christoph Lehrenfeld EFEF, Prague,
LECTURE 14 NUMERICAL INTEGRATION. Find
 LECTURE 14 NUMERCAL NTEGRATON Find b a fxdx or b a vx ux fx ydy dx Often integration is required. However te form of fx may be suc tat analytical integration would be very difficult or impossible. Use
LECTURE 14 NUMERCAL NTEGRATON Find b a fxdx or b a vx ux fx ydy dx Often integration is required. However te form of fx may be suc tat analytical integration would be very difficult or impossible. Use
A monolithic FEM solver for fluid structure
 A monolithic FEM solver for fluid structure interaction p. 1/1 A monolithic FEM solver for fluid structure interaction Stefan Turek, Jaroslav Hron jaroslav.hron@mathematik.uni-dortmund.de Department of
A monolithic FEM solver for fluid structure interaction p. 1/1 A monolithic FEM solver for fluid structure interaction Stefan Turek, Jaroslav Hron jaroslav.hron@mathematik.uni-dortmund.de Department of
A SHORT INTRODUCTION TO BANACH LATTICES AND
 CHAPTER A SHORT INTRODUCTION TO BANACH LATTICES AND POSITIVE OPERATORS In tis capter we give a brief introduction to Banac lattices and positive operators. Most results of tis capter can be found, e.g.,
CHAPTER A SHORT INTRODUCTION TO BANACH LATTICES AND POSITIVE OPERATORS In tis capter we give a brief introduction to Banac lattices and positive operators. Most results of tis capter can be found, e.g.,
Finite Difference Methods Assignments
 Finite Difference Metods Assignments Anders Söberg and Aay Saxena, Micael Tuné, and Maria Westermarck Revised: Jarmo Rantakokko June 6, 1999 Teknisk databeandling Assignment 1: A one-dimensional eat equation
Finite Difference Metods Assignments Anders Söberg and Aay Saxena, Micael Tuné, and Maria Westermarck Revised: Jarmo Rantakokko June 6, 1999 Teknisk databeandling Assignment 1: A one-dimensional eat equation
Department of Mathematics, K.T.H.M. College, Nashik F.Y.B.Sc. Calculus Practical (Academic Year )
") F.Y.B.Sc. Calculus Practical (Academic Year 06-7) Practical : Graps of Elementary Functions. a) Grap of y = f(x) mirror image of Grap of y = f(x) about X axis b) Grap of y = f( x) mirror image of Grap
F.Y.B.Sc. Calculus Practical (Academic Year 06-7) Practical : Graps of Elementary Functions. a) Grap of y = f(x) mirror image of Grap of y = f(x) about X axis b) Grap of y = f( x) mirror image of Grap
Fluid Animation. Christopher Batty November 17, 2011
 Fluid Animation Christopher Batty November 17, 2011 What distinguishes fluids? What distinguishes fluids? No preferred shape Always flows when force is applied Deforms to fit its container Internal forces
Fluid Animation Christopher Batty November 17, 2011 What distinguishes fluids? What distinguishes fluids? No preferred shape Always flows when force is applied Deforms to fit its container Internal forces
7.4 The Saddle Point Stokes Problem
 346 CHAPTER 7. APPLIED FOURIER ANALYSIS 7.4 The Saddle Point Stokes Problem So far the matrix C has been diagonal no trouble to invert. This section jumps to a fluid flow problem that is still linear (simpler
346 CHAPTER 7. APPLIED FOURIER ANALYSIS 7.4 The Saddle Point Stokes Problem So far the matrix C has been diagonal no trouble to invert. This section jumps to a fluid flow problem that is still linear (simpler
Phase space in classical physics
 Pase space in classical pysics Quantum mecanically, we can actually COU te number of microstates consistent wit a given macrostate, specified (for example) by te total energy. In general, eac microstate
Pase space in classical pysics Quantum mecanically, we can actually COU te number of microstates consistent wit a given macrostate, specified (for example) by te total energy. In general, eac microstate
MATH745 Fall MATH745 Fall
 MATH745 Fall 5 MATH745 Fall 5 INTRODUCTION WELCOME TO MATH 745 TOPICS IN NUMERICAL ANALYSIS Instructor: Dr Bartosz Protas Department of Matematics & Statistics Email: bprotas@mcmasterca Office HH 36, Ext
MATH745 Fall 5 MATH745 Fall 5 INTRODUCTION WELCOME TO MATH 745 TOPICS IN NUMERICAL ANALYSIS Instructor: Dr Bartosz Protas Department of Matematics & Statistics Email: bprotas@mcmasterca Office HH 36, Ext
A Momentum Exchange-based Immersed Boundary-Lattice. Boltzmann Method for Fluid Structure Interaction
 APCOM & ISCM -4 th December, 03, Singapore A Momentum Exchange-based Immersed Boundary-Lattice Boltzmann Method for Fluid Structure Interaction Jianfei Yang,,3, Zhengdao Wang,,3, and *Yuehong Qian,,3,4
APCOM & ISCM -4 th December, 03, Singapore A Momentum Exchange-based Immersed Boundary-Lattice Boltzmann Method for Fluid Structure Interaction Jianfei Yang,,3, Zhengdao Wang,,3, and *Yuehong Qian,,3,4
Different Approaches to a Posteriori Error Analysis of the Discontinuous Galerkin Method
 WDS'10 Proceedings of Contributed Papers, Part I, 151 156, 2010. ISBN 978-80-7378-139-2 MATFYZPRESS Different Approaces to a Posteriori Error Analysis of te Discontinuous Galerkin Metod I. Šebestová Carles
WDS'10 Proceedings of Contributed Papers, Part I, 151 156, 2010. ISBN 978-80-7378-139-2 MATFYZPRESS Different Approaces to a Posteriori Error Analysis of te Discontinuous Galerkin Metod I. Šebestová Carles
Méthode de quasi-newton en interaction fluide-structure. J.-F. Gerbeau & M. Vidrascu
 Méthode de quasi-newton en interaction fluide-structure J.-F. Gerbeau & M. Vidrascu Motivations médicales Athérosclérose : Sistole Diastole La formation des plaques est liée, entre autre, la dynamique
Méthode de quasi-newton en interaction fluide-structure J.-F. Gerbeau & M. Vidrascu Motivations médicales Athérosclérose : Sistole Diastole La formation des plaques est liée, entre autre, la dynamique
NONLINEAR CONTINUUM FORMULATIONS CONTENTS
 NONLINEAR CONTINUUM FORMULATIONS CONTENTS Introduction to nonlinear continuum mechanics Descriptions of motion Measures of stresses and strains Updated and Total Lagrangian formulations Continuum shell
NONLINEAR CONTINUUM FORMULATIONS CONTENTS Introduction to nonlinear continuum mechanics Descriptions of motion Measures of stresses and strains Updated and Total Lagrangian formulations Continuum shell
Vector and scalar penalty-projection methods
 Numerical Flow Models for Controlled Fusion - April 2007 Vector and scalar penalty-projection methods for incompressible and variable density flows Philippe Angot Université de Provence, LATP - Marseille
Numerical Flow Models for Controlled Fusion - April 2007 Vector and scalar penalty-projection methods for incompressible and variable density flows Philippe Angot Université de Provence, LATP - Marseille
The Derivative as a Function
 Section 2.2 Te Derivative as a Function 200 Kiryl Tsiscanka Te Derivative as a Function DEFINITION: Te derivative of a function f at a number a, denoted by f (a), is if tis limit exists. f (a) f(a + )
Section 2.2 Te Derivative as a Function 200 Kiryl Tsiscanka Te Derivative as a Function DEFINITION: Te derivative of a function f at a number a, denoted by f (a), is if tis limit exists. f (a) f(a + )
APPLICATION OF A DIRAC DELTA DIS-INTEGRATION TECHNIQUE TO THE STATISTICS OF ORBITING OBJECTS
 APPLICATION OF A DIRAC DELTA DIS-INTEGRATION TECHNIQUE TO THE STATISTICS OF ORBITING OBJECTS Dario Izzo Advanced Concepts Team, ESTEC, AG Noordwijk, Te Neterlands ABSTRACT In many problems related to te
APPLICATION OF A DIRAC DELTA DIS-INTEGRATION TECHNIQUE TO THE STATISTICS OF ORBITING OBJECTS Dario Izzo Advanced Concepts Team, ESTEC, AG Noordwijk, Te Neterlands ABSTRACT In many problems related to te
Interaction of Incompressible Fluid and Moving Bodies
 WDS'06 Proceedings of Contributed Papers, Part I, 53 58, 2006. ISBN 80-86732-84-3 MATFYZPRESS Interaction of Incompressible Fluid and Moving Bodies M. Růžička Charles University, Faculty of Mathematics
WDS'06 Proceedings of Contributed Papers, Part I, 53 58, 2006. ISBN 80-86732-84-3 MATFYZPRESS Interaction of Incompressible Fluid and Moving Bodies M. Růžička Charles University, Faculty of Mathematics
New Streamfunction Approach for Magnetohydrodynamics
 New Streamfunction Approac for Magnetoydrodynamics Kab Seo Kang Brooaven National Laboratory, Computational Science Center, Building 63, Room, Upton NY 973, USA. sang@bnl.gov Summary. We apply te finite
New Streamfunction Approac for Magnetoydrodynamics Kab Seo Kang Brooaven National Laboratory, Computational Science Center, Building 63, Room, Upton NY 973, USA. sang@bnl.gov Summary. We apply te finite
Numerical Analysis MTH603. dy dt = = (0) , y n+1. We obtain yn. Therefore. and. Copyright Virtual University of Pakistan 1
 , y n+1. We obtain yn. Therefore. and. Copyright Virtual University of Pakistan 1") Numerical Analysis MTH60 PREDICTOR CORRECTOR METHOD Te metods presented so far are called single-step metods, were we ave seen tat te computation of y at t n+ tat is y n+ requires te knowledge of y n only.
Numerical Analysis MTH60 PREDICTOR CORRECTOR METHOD Te metods presented so far are called single-step metods, were we ave seen tat te computation of y at t n+ tat is y n+ requires te knowledge of y n only.
Efficient FEM-multigrid solver for granular material
 Efficient FEM-multigrid solver for granular material S. Mandal, A. Ouazzi, S. Turek Chair for Applied Mathematics and Numerics (LSIII), TU Dortmund STW user committee meeting Enschede, 25th September,
Efficient FEM-multigrid solver for granular material S. Mandal, A. Ouazzi, S. Turek Chair for Applied Mathematics and Numerics (LSIII), TU Dortmund STW user committee meeting Enschede, 25th September,
Continuity. Example 1
 Continuity MATH 1003 Calculus and Linear Algebra (Lecture 13.5) Maoseng Xiong Department of Matematics, HKUST A function f : (a, b) R is continuous at a point c (a, b) if 1. x c f (x) exists, 2. f (c)
Continuity MATH 1003 Calculus and Linear Algebra (Lecture 13.5) Maoseng Xiong Department of Matematics, HKUST A function f : (a, b) R is continuous at a point c (a, b) if 1. x c f (x) exists, 2. f (c)
arxiv: v3 [math.na] 15 Dec 2009
![arxiv: v3 [math.na] 15 Dec 2009](/thumbs/90/102851275.jpg "arxiv: v3 [math.na] 15 Dec 2009") THE NAVIER-STOKES-VOIGHT MODEL FOR IMAGE INPAINTING M.A. EBRAHIMI, MICHAEL HOLST, AND EVELYN LUNASIN arxiv:91.4548v3 [mat.na] 15 Dec 9 ABSTRACT. In tis paper we investigate te use of te D Navier-Stokes-Voigt
THE NAVIER-STOKES-VOIGHT MODEL FOR IMAGE INPAINTING M.A. EBRAHIMI, MICHAEL HOLST, AND EVELYN LUNASIN arxiv:91.4548v3 [mat.na] 15 Dec 9 ABSTRACT. In tis paper we investigate te use of te D Navier-Stokes-Voigt
Department of Mathematical Sciences University of South Carolina Aiken Aiken, SC 29801
 RESEARCH SUMMARY AND PERSPECTIVES KOFFI B. FADIMBA Department of Matematical Sciences University of Sout Carolina Aiken Aiken, SC 29801 Email: KoffiF@usca.edu 1. Introduction My researc program as focused
RESEARCH SUMMARY AND PERSPECTIVES KOFFI B. FADIMBA Department of Matematical Sciences University of Sout Carolina Aiken Aiken, SC 29801 Email: KoffiF@usca.edu 1. Introduction My researc program as focused
Arbitrary order exactly divergence-free central discontinuous Galerkin methods for ideal MHD equations
 Arbitrary order exactly divergence-free central discontinuous Galerkin metods for ideal MHD equations Fengyan Li, Liwei Xu Department of Matematical Sciences, Rensselaer Polytecnic Institute, Troy, NY
Arbitrary order exactly divergence-free central discontinuous Galerkin metods for ideal MHD equations Fengyan Li, Liwei Xu Department of Matematical Sciences, Rensselaer Polytecnic Institute, Troy, NY
KINEMATICS OF CONTINUA
 KINEMATICS OF CONTINUA Introduction Deformation of a continuum Configurations of a continuum Deformation mapping Descriptions of motion Material time derivative Velocity and acceleration Transformation
KINEMATICS OF CONTINUA Introduction Deformation of a continuum Configurations of a continuum Deformation mapping Descriptions of motion Material time derivative Velocity and acceleration Transformation
The Vorticity Equation in a Rotating Stratified Fluid
 Capter 7 Te Vorticity Equation in a Rotating Stratified Fluid Te vorticity equation for a rotating, stratified, viscous fluid Te vorticity equation in one form or anoter and its interpretation provide
Capter 7 Te Vorticity Equation in a Rotating Stratified Fluid Te vorticity equation for a rotating, stratified, viscous fluid Te vorticity equation in one form or anoter and its interpretation provide
CONVERGENCE OF AN IMPLICIT FINITE ELEMENT METHOD FOR THE LANDAU-LIFSHITZ-GILBERT EQUATION
 CONVERGENCE OF AN IMPLICIT FINITE ELEMENT METHOD FOR THE LANDAU-LIFSHITZ-GILBERT EQUATION SÖREN BARTELS AND ANDREAS PROHL Abstract. Te Landau-Lifsitz-Gilbert equation describes dynamics of ferromagnetism,
CONVERGENCE OF AN IMPLICIT FINITE ELEMENT METHOD FOR THE LANDAU-LIFSHITZ-GILBERT EQUATION SÖREN BARTELS AND ANDREAS PROHL Abstract. Te Landau-Lifsitz-Gilbert equation describes dynamics of ferromagnetism,
Test 2 Review. 1. Find the determinant of the matrix below using (a) cofactor expansion and (b) row reduction. A = 3 2 =
 cofactor expansion and (b) row reduction. A = 3 2 =") Test Review Find te determinant of te matrix below using (a cofactor expansion and (b row reduction Answer: (a det + = (b Observe R R R R R R R R R Ten det B = (((det Hence det Use Cramer s rule to solve:
Test Review Find te determinant of te matrix below using (a cofactor expansion and (b row reduction Answer: (a det + = (b Observe R R R R R R R R R Ten det B = (((det Hence det Use Cramer s rule to solve:
Discrete Projection Methods for Incompressible Fluid Flow Problems and Application to a Fluid-Structure Interaction
 Discrete Projection Methods for Incompressible Fluid Flow Problems and Application to a Fluid-Structure Interaction Problem Jörg-M. Sautter Mathematisches Institut, Universität Düsseldorf, Germany, sautter@am.uni-duesseldorf.de
Discrete Projection Methods for Incompressible Fluid Flow Problems and Application to a Fluid-Structure Interaction Problem Jörg-M. Sautter Mathematisches Institut, Universität Düsseldorf, Germany, sautter@am.uni-duesseldorf.de
Partitioned Methods for Multifield Problems
 C Partitioned Methods for Multifield Problems Joachim Rang, 6.7.2016 6.7.2016 Joachim Rang Partitioned Methods for Multifield Problems Seite 1 C One-dimensional piston problem fixed wall Fluid flexible
C Partitioned Methods for Multifield Problems Joachim Rang, 6.7.2016 6.7.2016 Joachim Rang Partitioned Methods for Multifield Problems Seite 1 C One-dimensional piston problem fixed wall Fluid flexible
Uniform estimate of the constant in the strengthened CBS inequality for anisotropic non-conforming FEM systems
 Uniform estimate of te constant in te strengtened CBS inequality for anisotropic non-conforming FEM systems R. Blaeta S. Margenov M. Neytceva Version of November 0, 00 Abstract Preconditioners based on
Uniform estimate of te constant in te strengtened CBS inequality for anisotropic non-conforming FEM systems R. Blaeta S. Margenov M. Neytceva Version of November 0, 00 Abstract Preconditioners based on
Conservation of Mass. Computational Fluid Dynamics. The Equations Governing Fluid Motion
 http://www.nd.edu/~gtryggva/cfd-course/ http://www.nd.edu/~gtryggva/cfd-course/ Computational Fluid Dynamics Lecture 4 January 30, 2017 The Equations Governing Fluid Motion Grétar Tryggvason Outline Derivation
http://www.nd.edu/~gtryggva/cfd-course/ http://www.nd.edu/~gtryggva/cfd-course/ Computational Fluid Dynamics Lecture 4 January 30, 2017 The Equations Governing Fluid Motion Grétar Tryggvason Outline Derivation
LIMITS AND DERIVATIVES CONDITIONS FOR THE EXISTENCE OF A LIMIT
 LIMITS AND DERIVATIVES Te limit of a function is defined as te value of y tat te curve approaces, as x approaces a particular value. Te limit of f (x) as x approaces a is written as f (x) approaces, as
LIMITS AND DERIVATIVES Te limit of a function is defined as te value of y tat te curve approaces, as x approaces a particular value. Te limit of f (x) as x approaces a is written as f (x) approaces, as
ERROR ESTIMATES FOR A FULLY DISCRETIZED SCHEME TO A CAHN-HILLIARD PHASE-FIELD MODEL FOR TWO-PHASE INCOMPRESSIBLE FLOWS
 ERROR ESTIMATES FOR A FULLY DISCRETIZED SCHEME TO A CAHN-HILLIARD PHASE-FIELD MODEL FOR TWO-PHASE INCOMPRESSIBLE FLOWS YONGYONG CAI, AND JIE SHEN Abstract. We carry out in tis paper a rigorous error analysis
ERROR ESTIMATES FOR A FULLY DISCRETIZED SCHEME TO A CAHN-HILLIARD PHASE-FIELD MODEL FOR TWO-PHASE INCOMPRESSIBLE FLOWS YONGYONG CAI, AND JIE SHEN Abstract. We carry out in tis paper a rigorous error analysis
Getting started: CFD notation
 PDE of p-th order Getting started: CFD notation f ( u,x, t, u x 1,..., u x n, u, 2 u x 1 x 2,..., p u p ) = 0 scalar unknowns u = u(x, t), x R n, t R, n = 1,2,3 vector unknowns v = v(x, t), v R m, m =
PDE of p-th order Getting started: CFD notation f ( u,x, t, u x 1,..., u x n, u, 2 u x 1 x 2,..., p u p ) = 0 scalar unknowns u = u(x, t), x R n, t R, n = 1,2,3 vector unknowns v = v(x, t), v R m, m =
5 Ordinary Differential Equations: Finite Difference Methods for Boundary Problems
 5 Ordinary Differential Equations: Finite Difference Metods for Boundary Problems Read sections 10.1, 10.2, 10.4 Review questions 10.1 10.4, 10.8 10.9, 10.13 5.1 Introduction In te previous capters we
5 Ordinary Differential Equations: Finite Difference Metods for Boundary Problems Read sections 10.1, 10.2, 10.4 Review questions 10.1 10.4, 10.8 10.9, 10.13 5.1 Introduction In te previous capters we
Introduction to Continuum Mechanics
 Introduction to Continuum Mechanics I-Shih Liu Instituto de Matemática Universidade Federal do Rio de Janeiro 2018 Contents 1 Notations and tensor algebra 1 1.1 Vector space, inner product........................
Introduction to Continuum Mechanics I-Shih Liu Instituto de Matemática Universidade Federal do Rio de Janeiro 2018 Contents 1 Notations and tensor algebra 1 1.1 Vector space, inner product........................
Derivatives. By: OpenStaxCollege
 By: OpenStaxCollege Te average teen in te United States opens a refrigerator door an estimated 25 times per day. Supposedly, tis average is up from 10 years ago wen te average teenager opened a refrigerator
By: OpenStaxCollege Te average teen in te United States opens a refrigerator door an estimated 25 times per day. Supposedly, tis average is up from 10 years ago wen te average teenager opened a refrigerator
Semigroups of Operators
 Lecture 11 Semigroups of Operators In tis Lecture we gater a few notions on one-parameter semigroups of linear operators, confining to te essential tools tat are needed in te sequel. As usual, X is a real
Lecture 11 Semigroups of Operators In tis Lecture we gater a few notions on one-parameter semigroups of linear operators, confining to te essential tools tat are needed in te sequel. As usual, X is a real
J. Liou Tulsa Research Center Amoco Production Company Tulsa, OK 74102, USA. Received 23 August 1990 Revised manuscript received 24 October 1990
 Computer Methods in Applied Mechanics and Engineering, 94 (1992) 339 351 1 A NEW STRATEGY FOR FINITE ELEMENT COMPUTATIONS INVOLVING MOVING BOUNDARIES AND INTERFACES THE DEFORMING-SPATIAL-DOMAIN/SPACE-TIME
Computer Methods in Applied Mechanics and Engineering, 94 (1992) 339 351 1 A NEW STRATEGY FOR FINITE ELEMENT COMPUTATIONS INVOLVING MOVING BOUNDARIES AND INTERFACES THE DEFORMING-SPATIAL-DOMAIN/SPACE-TIME
Control of Interface Evolution in Multi-Phase Fluid Flows
 Control of Interface Evolution in Multi-Phase Fluid Flows Markus Klein Department of Mathematics University of Tübingen Workshop on Numerical Methods for Optimal Control and Inverse Problems Garching,
Control of Interface Evolution in Multi-Phase Fluid Flows Markus Klein Department of Mathematics University of Tübingen Workshop on Numerical Methods for Optimal Control and Inverse Problems Garching,
LECTURE # 0 BASIC NOTATIONS AND CONCEPTS IN THE THEORY OF PARTIAL DIFFERENTIAL EQUATIONS (PDES)
") LECTURE # 0 BASIC NOTATIONS AND CONCEPTS IN THE THEORY OF PARTIAL DIFFERENTIAL EQUATIONS (PDES) RAYTCHO LAZAROV 1 Notations and Basic Functional Spaces Scalar function in R d, d 1 will be denoted by u,
LECTURE # 0 BASIC NOTATIONS AND CONCEPTS IN THE THEORY OF PARTIAL DIFFERENTIAL EQUATIONS (PDES) RAYTCHO LAZAROV 1 Notations and Basic Functional Spaces Scalar function in R d, d 1 will be denoted by u,
FREE BOUNDARY PROBLEMS IN FLUID MECHANICS
 FREE BOUNDARY PROBLEMS IN FLUID MECHANICS ANA MARIA SOANE AND ROUBEN ROSTAMIAN We consider a class of free boundary problems governed by the incompressible Navier-Stokes equations. Our objective is to
FREE BOUNDARY PROBLEMS IN FLUID MECHANICS ANA MARIA SOANE AND ROUBEN ROSTAMIAN We consider a class of free boundary problems governed by the incompressible Navier-Stokes equations. Our objective is to
HOMEWORK HELP 2 FOR MATH 151
 HOMEWORK HELP 2 FOR MATH 151 Here we go; te second round of omework elp. If tere are oters you would like to see, let me know! 2.4, 43 and 44 At wat points are te functions f(x) and g(x) = xf(x)continuous,
HOMEWORK HELP 2 FOR MATH 151 Here we go; te second round of omework elp. If tere are oters you would like to see, let me know! 2.4, 43 and 44 At wat points are te functions f(x) and g(x) = xf(x)continuous,
Adaptive C1 Macroelements for Fourth Order and Divergence-Free Problems
 Adaptive C1 Macroelements for Fourth Order and Divergence-Free Problems Roy Stogner Computational Fluid Dynamics Lab Institute for Computational Engineering and Sciences University of Texas at Austin March
Adaptive C1 Macroelements for Fourth Order and Divergence-Free Problems Roy Stogner Computational Fluid Dynamics Lab Institute for Computational Engineering and Sciences University of Texas at Austin March
Combining functions: algebraic methods
 Combining functions: algebraic metods Functions can be added, subtracted, multiplied, divided, and raised to a power, just like numbers or algebra expressions. If f(x) = x 2 and g(x) = x + 2, clearly f(x)
Combining functions: algebraic metods Functions can be added, subtracted, multiplied, divided, and raised to a power, just like numbers or algebra expressions. If f(x) = x 2 and g(x) = x + 2, clearly f(x)