On a Hamiltonian version of a 3D Lotka-Volterra system
|
|
|
- Edgar Sharp
- 5 years ago
- Views:
Transcription
1 On a Hamiltonian version of a 3D Lotka-Volterra system Răzvan M. Tudoran and Anania Gîrban arxiv: v1 [math-ph] 7 Jun 2011 Abstract In this paper we present some relevant dynamical properties of a 3D Lotka- Volterra system from the Poisson dynamics point of view. AMS 2000: 70H05; 37J25; 37J35. Keywords: Hamiltonian dynamics, Lotka-Volterra system, stability of equilibria, Poincaré compactification, energy-casimir mapping. 1 Introduction The Lotka-Volterra system has been widely investigated in the last years. This system, studied by May and Leonard [8], models the evolution of competition between three species. Among the studied topics related with the Lotka-Volterra system, we recall a few of them together with a partial list of references, namely: integrals and invariant manifolds ([2], [4]), stability ([7], [2]), analytic behavior [3], nonlinear analysis [8], and many others. In this paper we consider a special case of the Lotka-Volterra system, recently introduced in [4]. We write the system as a Hamiltonian system of Poisson type in order to analyze the system from the Poisson dynamics point of view. More exactly, in the second section ofthispaper, wepreparetheframeworkofourstudy bywriting thelotka- Volterra system as a Hamilton-Poisson system, and also find a SL(2, R) parameterized family of Hamilton-Poisson realizations. As consequence of the Hamiltonian setting we obtain two new first integrals of the Lotka-Volterra system that generates the first integrals of this system found in [4]. In the third section of the paper we determine the equilibria of the Lotka-Volterra system and then analyze their Lyapunov stability. The fourth section is dedicated to the study of the Poincaré compactification of the Lotka- Volterra system. More exactly, we integrate explicitly the Poincaré compactification of the Lotka-Volterra system. In the fifth section of the article we present some convexity properties of the image of the energy-casimir mapping and define some naturally associated semialgebraic splittings of the image. More precisely, we discuss the relation between the image through the energy-casimir mapping of the families of equilibria of the Lotka-Volterra system and the canonical Whitney stratifications of the semialgebraic splittings of the image of the energy-casimir mapping. In the sixth part of the paper we 1
2 give a topological classification of the fibers of the energy-casimir mapping, classification that follows naturally from the stratifications introduced in the above section. Note that in our approach we consider fibers over the regular and also over the singular values of the energy-casimir mapping. In the last part of the article we give two Lax formulations of the system. For details on Poisson geometry and Hamiltonian dynamics see e.g. [6], [9], [1], [11]. 2 Hamilton-Poisson realizations of a 3D Lotka-Volterra system The Lotka-Volterra system we consider for our study, is governed by the equations: ẋ = x(x y z) ẏ = y( x+y z) (2.1) ż = z( x y +z). Note that the above system is the Lotka-Volterra system studied in [4] in the case a = b = 1. In [4] it is shown that this system admits the following polynomial conservation laws: f(x,y,z) = xyz(x y)(x z)(y z), g(x,y,z) = x 2 y 2 x 2 yz xy 2 z +x 2 z 2 xyz 2 +y 2 z 2. Using Hamiltonian setting of the problem, we provide two degree-two polynomial conservation laws of the system (2.1) which generates f and g. These conservation laws will be represented by the Hamiltonian and respectively a Casimir function of the Poisson configuration manifold of the system (2.1). As the purpose of this paper is to study the above system from the Poisson dynamics point of view, the first step in this approach is to give a Hamilton-Poisson realization of the system. Theorem 2.1 The dynamics (2.1) has the following Hamilton-Poisson realization: where, (R 3,Π C,H) (2.2) 0 y x z Π C (x,y,z) = y 0 y x+z y 0 is the Poisson structure generated by the smooth function C(x,y,z) := xy + yz, and the Hamiltonian H C (R 3,R) is given by H(x,y,z) := xy xz. Note that, by Poisson structure generated by the smooth function C, we mean the Poisson structure generated by the Poisson bracket {f,g} := C ( f g), for any smooth functions f,g C (R 3,R). 2
3 Proof. Indeed, we have successively: 0 y x z Π C (x,y,z) H(x,y,z) = y 0 y x+z y 0 y z x x = x(x y z) y( x+y z) z( x y +z) = ẋ ẏ ż, as required. Remark 2.2 Since the signature of the quadratic form generated by C(x,y,z) = xy+ yz is ( 1,0,+1), the triple (R 3,Π C,H) it is isomorphic with a Lie-Poisson realization of the Lotka-Volterra system (2.1) on the dual of the semidirect product between the Lie algebra so(1,1) and R 2. Remark 2.3 By definition we have that the center of the Poisson algebra C (R 3,R) is generated by the Casimir invariant C(x,y,z) = xy +yz. Remark 2.4 The conservation laws f and g found in [4], can be written in terms of the Casimir C and respectively the Hamiltonian H as follows: g = 1 2 f = CH(C +H), [ C 2 +H 2 +(C +H) 2]. Next proposition gives others Hamilton-Poisson realizations of the Lotka-Volterra system (2.1). Proposition 2.5 The dynamics (2.1) admits a family of Hamilton-Poisson realizations parameterized by the group SL(2,R). More exactly, (R 3,{, } a,b,h c,d ) is a Hamilton- Poisson realization of the dynamics (2.1) where the bracket {, } a,b is defined by {f,g} a,b := C a,b ( f g), for any f,g C (R 3,R), and the functions C a,b and H c,d are given by: C a,b (x,y,z) = ( a+b)xy +ayz bxz, H c,d (x,y,z) = ( c+d)xy +cyz dxz, [ ] a b respectively, the matrix of coefficients a,b,c,d is SL(2,R). c d Proof. The conclusion follows directly taking into account that the matrix formulation of the Poisson bracket {, } a,b is given in coordinates by: 0 bx+ay (a b)x az Π a,b (x,y,z) = bx ay 0 ( a+b)y bz. ( a+b)x+az (a b)y +bz 0 3
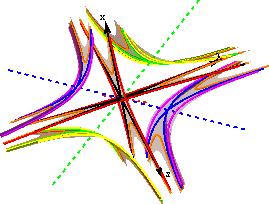
4 3 Stability of equilibria In this short section we analyze the stability properties of the equilibrium states of the Lotka-Volterra system (2.1). Remark 3.1 The equilibrium states of the system (2.1) are given as the union of the following three families: E 1 := {(0,M,M) : M R}, E 2 := {(M,0,M) : M R}, E 3 := {(M,M,0) : M R}. Figure 1 presents the above defined families of equilibrium states of the Lotka-Volterra system. Figure 1: Equilibria of the Lotka-Volterra system (2.1). In the following theorem we describe the stability properties of the equilibrium states of the system (2.1). Theorem 3.2 All the equilibrium states of the Lotka-Volterra system (2.1) are unstable. Proof. The conclusion follows from the fact that the characteristic polynomial associated with the linear part of the system evaluated at an arbitrary equilibrium state, is the same for any of the families E 1,E 2,E 3, and is given by: p(λ) = (2M λ)λ(2m +λ). For M = 0, we get the origin (0,0,0) which is also unstable since in any arbitrary small open neighborhood around, there exists unstable equilibrium states. 4
5 4 The behavior on the sphere at infinity In this section we integrate explicitly the Poincaré compactification of the Lotka-Volterra system, and consequently the Lotka-Volterra system (2.1) (on the sphere) at infinity. Recall that using the Poincaré compactification of R 3, the infinity of R 3 is represented by the sphere S 2 - the equator of the unit sphere S 3 in R 4. For details regarding the Poincaré compactification of polynomial vector fields in R 3 see [5]. Fixing the notations in accordance with the results stated in [5] we write the Lotka- Volterra system (2.1) as ẋ = P 1 (x,y,z) ẏ = P 2 (x,y,z) ż = P 3 (x,y,z), with P 1 (x,y,z) = x(x y z), P 2 (x,y,z) = y( x+y z), P 3 (x,y,z) = z( x y +z). Let us now study the Poincaré compactification of the Lotka-Volterra system in the local charts U i and V i, i {1,2,3}, of the manifold S 3. The Poincaré compactification (p(x) in the notations from [5]) of the Lotka-Volterra system (2.1) is the same for each of the local charts U 1, U 2 and respectively U 3 and is given in the corresponding local coordinates by ż 1 = 2z 1 (1 z 1 ) ż 2 = 2z 2 (1 z 2 ) ż 3 = z 3 (z 1 +z 2 +1). (4.1) Regarding the Poincaré compactification of the Lotka-Volterra system in the local charts V 1, V 2 and respectively V 3, as a property of the compactification procedure, the compactified vector field p(x) in the local chart V i coincides with the vector field p(x) in U i multiplied by the factor 1, for each i {1,2,3}. Hence, for each i {1,2,3}, the flow of the system (4.1) on the local chart V i is the same as the flow on the local chart U i reversing the time. The system (4.1) is integrable with the solution given by e 2t z 1 (t) = e 2t +e k 1 e 2t z 2 (t) = e 2t +e k 2 e t k 3 z 3 (t) =, e 2t +e k 1 e 2t +e k 2 where k 1,k 2,k 3 are arbitrary real constants. ToanalyzetheLotka-Volterrasystem onthespheres 2 atinfinity, notethatthepoints on the sphere at infinity are characterized by z 3 = 0. As the plane z 1 z 2 is invariant under the flow of the system (4.1), the compactified Lotka-Volterra system on the local charts U i (i {1,2,3}) on the infinity sphere reduces to { ż1 = 2z 1 (1 z 1 ) (4.2) ż 2 = 2z 2 (1 z 2 ). 5
6 The system (4.2) is integrable and the solution is given by e 2t z 1 (t) = e 2t +e k 1 e 2t z 2 (t) = e 2t +e, k 2 where k 1,k 2 are arbitrary real constants. Consequently, the phase portrait on the local charts U i (i {1,2,3}) on the infinity sphere is given in Figure 2. Figure 2: Phase portrait of the system (4.2). 5 The image of the energy-casimir mapping The aim of this section is to study the image of the energy-casimir mapping Im(EC), associated with the Hamilton-Poisson realization(2.2) of the Lotka-Volterra system(2.1). We consider convexity properties of the image of EC, as well as a semialgebraic splitting of the image that agree with the topology of the symplectic leaves of the Poisson manifold (R 3,Π C ). Recall that by a semialgebraic splitting, we mean a splitting consisting of semialgebraic manifolds, namely manifolds that are described in coordinates by a set of polynomial inequalities and equalities. For details on semialgebraic manifolds and their geometry see e.g. [10]. All these will be used later on, in order to obtain a topological classification of the orbits of (2.1). Recall first that the energy-casimir mapping, EC C (R 3,R 2 ) is given by: EC(x,y,z) = (H(x,y,z),C(x,y,z)), (x,y,z) R 3 6
7 where H,C C (R 3,R) are the Hamiltonian of the system (2.1), and respectively the Casimir of the Poisson manifold (R 3,Π C ), both of them as considered in Theorem 2.1. Next proposition explicitly gives the semialgebraic splitting of the image of the energy-casimir map EC. Proposition 5.1 The image of the energy-casimir map - R 2 - admits the following splitting: Im(EC) = S c>0 S c=0 S c<0, where the subsets S c>0, S c=0, S c<0 R 2 are splitting further on a union of semialgebraic manifolds, as follows: S c>0 = {(h,c) R 2 : h < 0;c > 0} {(h,c) R 2 : h = 0;c > 0} {(h,c) R 2 : h > 0;c > 0}, S c=0 = {(h,c) R 2 : h < 0;c = 0} {(h,c) R 2 : h = c = 0} {(h,c) R 2 : h > 0;c = 0}, S c<0 = {(h,c) R 2 : c < min{ h,0}} {(h,c) R 2 : c < 0;c = h} {(h,c) R 2 : h < c < 0}. Proof. The conclusion follows directly by simple algebraic computation using the definition of the energy-casimir mapping. Remark 5.2 The superscripts used to denote the sets S, are in agreement with the topology of the symplectic leaves of the Poisson manifold (R 3,Π C ), namely: (i) For c 0, Γ c = {(x,y,z) R 3 : y(z x) = c} is a hyperbolic cylinder. (ii) For c = 0, Γ c = {(x,y,z) R 3 : y(z x) = c} is a union of two intersecting planes. The connection between the semialgebraic splittings of the image Im(EC) given by Proposition 5.1, and the equilibrium states of the Lotka-Volterra system, is given in the following remark. Remark 5.3 The semialgebraic splitting of the sets S is described in terms of the image of equilibria of the Lotka-Volterra system through the map EC as follows: (i) S c>0 = Σ 1 Im(EC E 1 ) Σ 1, where E 1 = E 1 \{(0,0,0)}, Σ 1 = {(h,c) R2 : h < 0;c > 0}, Σ 1 = {(h,c) R2 : h > 0;c > 0}. 7
8 (ii) S c=0 = Im(EC E 2 ) Σ 0 Σ 0, where E 2 = E 2 \{(0,0,0)}, Σ 0 = {(0,0,0)}, Σ 0 = {(h,c) R 2 : h > 0;c = 0}. (iii) S c<0 = Σ 3 Im(EC E 3) Σ 3, where E 3 = E 3 \{(0,0,0)}, Σ 3 = {(h,c) R2 : c < min{ h,0}}, Σ 3 = {(h,c) R2 : h < c < 0}. All the stratification results can be gathered as shown in Figure 3. Note that for simplicity we adopted the notation Im(EC E ) not = : Σ. 8
9 Im(EC) S c>0 S c=0 c c h 0 0 h S c<0 0 c 0 h S0 c>0 S0 c=0 S0 c<0 c 0 h Figure 3: Semialgebraic splitting of Im(EC). Remark 5.4 As a convex set, the image of the energy-casimir map is convexly generated by the images of the equilibrium states of the Lotka-Volterra system (2.1), namely: Im(EC) = co{im(ec E1 ),Im(EC E2 ),Im(EC E3 )}. 9
10 6 The topology of the fibers of the energy-casimir mapping In this section we describe the topology of the fibers of EC, considering for our study fibers over regular values of EC as well as fibers over the singular values. It will remain an open question how these fibers fit all together in a more abstract fashion, such as bundle structures in the symplectic Arnold-Liouville integrable regular case. Proposition 6.1 According to the stratifications from the previous section, the topology of the fibers of EC can be described as in Tables 1, 2, 3: S c>0 A S c>0 Σ 1 Σ 1 Σ 1 F (h,c) R 3 (h,c) A 4 (R {i}) 8 (R {i}) {pt} {pt } 4 (R {i}) Dynamical union of union of 8 union of description 4 orbits orbits and two 4 orbits equilibrium points Table 1: Fibers classification corresponding to S c>0. S c=0 A S c=0 Σ 2 Σ 0 Σ 0 F (h,c) R 3 (h,c) A 8 (R {i}) {pt} {pt } 8 (R {i}) {pt} 4 (R {i}) Dynamical union of 8 union of 8 union of description orbits and two orbits and one 4 orbits equilibrium points equilibrium point Table 2: Fibers classification corresponding to S c=0. 10

11 S c<0 A S c<0 Σ 3 Σ 3 Σ 3 F (h,c) R 3 (h,c) A 4 (R {i}) 8 (R {i}) {pt} {pt } 4 (R {i}) Dynamical union of union of 8 union of description 4 orbits orbits and two 4 orbits equilibrium points Table 3: Fibers classification corresponding to S c<0. Proof. The conclusion follows by simple computations according to the topology of the solution set of the system: { H(x,y,z) = h C(x,y,z) = c where (h, c) belongs to the semialgebraic manifolds introduced in the above section. A presentation that puts together the topological classification of the fibers of EC and the topological classification of the symplectic leaves of the Poisson manifold (R 3,Π C ), is given in Figure 4. 11
) EC 1 (S c<0")
 (S c<0 (S")

12 EC 1 (R 2 ) = EC 1 (Im(EC)) EC 1 (S c<0 ) EC 1 (S c=0 ) EC 1 (S c>0 ) EC 1 (R 2 ) = EC 1 (S c<0 ) EC 1 (S c=0 ) EC 1 (S c>0 ) Figure 4: Phase portrait splitting. 12
13 7 Lax Formulation In this section we present a Lax formulation of the Lotka-Volterra system (2.1). Let us first note that as the system (2.1) restricted to a regular symplectic leaf, give rise to a sypmlectic Hamiltonian system that is completely integrable in the sense of Liouville and consequently it has a Lax formulation. Is a natural question to ask if the unrestricted system admit a Lax formulation. The answer is positive and is given by the following proposition: Proposition 7.1 The Lotka-Volterra system (2.1) can be written in the Lax form L = [L,B], where the matrices L and respectively B are given by: 0 x y z 0 iz i(x y) L = x+y 0 i(x+y z), B = iz 0 0. z i(x+y z) 0 i(x y) 0 0 References [1] R.H. Cushman and L. Bates, Global aspects of classical integrable systems (1977), Basel: Birkhauser. [2] P.G.L. Leach and J. Miritzis, Competing species: integrability and stability, J. Nonlinear Math. Phys., 11 (2004), [3] P.G.L. Leach and J. Miritzis, Analytic behavior of competition among three species, J. Nonlinear Math. Phys., 13 (2006), [4] J. Llibre and C. Valls, Polynomial, rational and analytic first integrals for a family of 3- dimensional Lotka-Volterra systems, Z. Angew. Math. Phys., (2011), DOI /s [5] C.A. Buzzi, J. Llibre and J.C. Medrado, Periodic orbits for a class of reversible quadratic vector field on R 3, J. Math. Anal. Appl., 335 (2007), [6] J.E. Marsden, Lectures on mechanics, London Mathematical Society Lecture Notes Series, vol. 174, Cambridge University Press. [7] R.M. May, Stability and Complexity in Model Ecosystems(1974), Second Edition, Princeton University Press, Princeton. [8] R.M. May and W.J. Leonard, Nonlinear aspects of competition between three species, SIAM J. Appl. Math., 29 (1975), [9] J.E. Marsden and T.S. Ratiu, Introduction to mechanics and symmetry, Texts in Applied Mathematics, vol. 17, second edition, second printing, Springer, Berlin. [10] M.J. Pflaum, Analytic and geometric study of stratified spaces (2001), Lecture Notes in Mathematics, vol. 510, Springer, Berlin. 13
14 [11] T.S. Ratiu, R.M. Tudoran, L. Sbano, E. Sousa Dias and G. Terra, Geometric Mechanics and Symmetry: the Peyresq Lectures; Chapter II: A Crash Course in Geometric Mechanics, pp , London Mathematical Society Lecture Notes Series, vol. 306(2005), Cambridge University Press. R.M. Tudoran The West University of Timişoara Faculty of Mathematics and C.S., Department of Mathematics, B-dl. Vasile Parvan, No. 4, Timişoara, Romania. tudoran@math.uvt.ro Supported by CNCSIS-UEFISCDI, project number PN II-IDEI code 1081/2008 No. 550/2009. A. Gîrban Politehnica University of Timişoara Department of Mathematics, Piaţa Victoriei nr. 2, Timişoara, România. anania.girban@gmail.com 14
On the rattleback dynamics
 On the rattleback dynamics Răzvan M. Tudoran and Anania Gîrban arxiv:1802.00338v1 [math.ds] 1 Feb 2018 Abstract In this paper we present some relevant dynamical properties of the rattleback, from the Poisson
On the rattleback dynamics Răzvan M. Tudoran and Anania Gîrban arxiv:1802.00338v1 [math.ds] 1 Feb 2018 Abstract In this paper we present some relevant dynamical properties of the rattleback, from the Poisson
M3-4-5 A16 Notes for Geometric Mechanics: Oct Nov 2011
 M3-4-5 A16 Notes for Geometric Mechanics: Oct Nov 2011 Text for the course: Professor Darryl D Holm 25 October 2011 Imperial College London d.holm@ic.ac.uk http://www.ma.ic.ac.uk/~dholm/ Geometric Mechanics
M3-4-5 A16 Notes for Geometric Mechanics: Oct Nov 2011 Text for the course: Professor Darryl D Holm 25 October 2011 Imperial College London d.holm@ic.ac.uk http://www.ma.ic.ac.uk/~dholm/ Geometric Mechanics
Research Article A Hamilton-Poisson Model of the Chen-Lee System
 Applied Mathematics Volume 1, Article ID 4848, 11 pages doi:1.1155/1/4848 Research Article A Hamilton-Poisson Model of the Chen-Lee System Camelia Pop Arieşanu Department of Mathematics, Politehnica University
Applied Mathematics Volume 1, Article ID 4848, 11 pages doi:1.1155/1/4848 Research Article A Hamilton-Poisson Model of the Chen-Lee System Camelia Pop Arieşanu Department of Mathematics, Politehnica University
Hopf Bifurcation and Limit Cycle Analysis of the Rikitake System
 ISSN 749-3889 (print), 749-3897 (online) International Journal of Nonlinear Science Vol.4(0) No.,pp.-5 Hopf Bifurcation and Limit Cycle Analysis of the Rikitake System Xuedi Wang, Tianyu Yang, Wei Xu Nonlinear
ISSN 749-3889 (print), 749-3897 (online) International Journal of Nonlinear Science Vol.4(0) No.,pp.-5 Hopf Bifurcation and Limit Cycle Analysis of the Rikitake System Xuedi Wang, Tianyu Yang, Wei Xu Nonlinear
On local normal forms of completely integrable systems
 On local normal forms of completely integrable systems ENCUENTRO DE Răzvan M. Tudoran West University of Timişoara, România Supported by CNCS-UEFISCDI project PN-II-RU-TE-2011-3-0103 GEOMETRÍA DIFERENCIAL,
On local normal forms of completely integrable systems ENCUENTRO DE Răzvan M. Tudoran West University of Timişoara, România Supported by CNCS-UEFISCDI project PN-II-RU-TE-2011-3-0103 GEOMETRÍA DIFERENCIAL,
Research Article Numerical Integration and Synchronization for the 3-Dimensional Metriplectic Volterra System
 Mathematical Problems in Engineering Volume, Article ID 769, pages doi:.55//769 Research Article Numerical Integration and Synchronization for the -Dimensional Metriplectic Volterra System Gheorghe Ivan,
Mathematical Problems in Engineering Volume, Article ID 769, pages doi:.55//769 Research Article Numerical Integration and Synchronization for the -Dimensional Metriplectic Volterra System Gheorghe Ivan,
The Erwin Schrodinger International Pasteurgasse 6/7. Institute for Mathematical Physics A-1090 Wien, Austria
 ESI The Erwin Schrodinger International Pasteurgasse 6/7 Institute for Mathematical Physics A-1090 Wien, Austria On an Extension of the 3{Dimensional Toda Lattice Mircea Puta Vienna, Preprint ESI 165 (1994)
ESI The Erwin Schrodinger International Pasteurgasse 6/7 Institute for Mathematical Physics A-1090 Wien, Austria On an Extension of the 3{Dimensional Toda Lattice Mircea Puta Vienna, Preprint ESI 165 (1994)
UNIVERSIDADE DE SÃO PAULO
 UNIVERSIDADE DE SÃO PAULO Instituto de Ciências Matemáticas e de Computação ISSN 010-577 GLOBAL DYNAMICAL ASPECTS OF A GENERALIZED SPROTT E DIFFERENTIAL SYSTEM REGILENE OLIVEIRA CLAUDIA VALLS N o 41 NOTAS
UNIVERSIDADE DE SÃO PAULO Instituto de Ciências Matemáticas e de Computação ISSN 010-577 GLOBAL DYNAMICAL ASPECTS OF A GENERALIZED SPROTT E DIFFERENTIAL SYSTEM REGILENE OLIVEIRA CLAUDIA VALLS N o 41 NOTAS
The Erwin Schrodinger International Pasteurgasse 6/7. Institute for Mathematical Physics A-1090 Wien, Austria
 ESI The Erwin Schrodinger International Pasteurgasse 6/7 Institute for Mathematical Physics A-090 Wien, Austria On the Rigid Body with Two Linear Controls Mircea Craioveanu Mircea Puta Vienna, Preprint
ESI The Erwin Schrodinger International Pasteurgasse 6/7 Institute for Mathematical Physics A-090 Wien, Austria On the Rigid Body with Two Linear Controls Mircea Craioveanu Mircea Puta Vienna, Preprint
Research Article Hamilton-Poisson Realizations for the Lü System
 Mathematical Problems in Engineering Volume 011, Article ID 8435, 13 pages doi:10.1155/011/8435 Research Article Hamilton-Poisson Realizations for the Lü System Camelia Pop, 1 Camelia Petrişor, 1 and Dumitru
Mathematical Problems in Engineering Volume 011, Article ID 8435, 13 pages doi:10.1155/011/8435 Research Article Hamilton-Poisson Realizations for the Lü System Camelia Pop, 1 Camelia Petrişor, 1 and Dumitru
The Toda Lattice. Chris Elliott. April 9 th, 2014
 The Toda Lattice Chris Elliott April 9 th, 2014 In this talk I ll introduce classical integrable systems, and explain how they can arise from the data of solutions to the classical Yang-Baxter equation.
The Toda Lattice Chris Elliott April 9 th, 2014 In this talk I ll introduce classical integrable systems, and explain how they can arise from the data of solutions to the classical Yang-Baxter equation.
A note on stability of spacecrafts and underwater vehicles
 A note on stability of spacecrafts and underwater vehicles arxiv:1603.00343v1 [math-ph] 1 Mar 2016 Dan Comănescu Department of Mathematics, West University of Timişoara Bd. V. Pârvan, No 4, 300223 Timişoara,
A note on stability of spacecrafts and underwater vehicles arxiv:1603.00343v1 [math-ph] 1 Mar 2016 Dan Comănescu Department of Mathematics, West University of Timişoara Bd. V. Pârvan, No 4, 300223 Timişoara,
Hopf bifurcations analysis of a three-dimensional nonlinear system
 BULETINUL ACADEMIEI DE ŞTIINŢE A REPUBLICII MOLDOVA. MATEMATICA Number 358), 28, Pages 57 66 ISSN 124 7696 Hopf bifurcations analysis of a three-dimensional nonlinear system Mircea Craioveanu, Gheorghe
BULETINUL ACADEMIEI DE ŞTIINŢE A REPUBLICII MOLDOVA. MATEMATICA Number 358), 28, Pages 57 66 ISSN 124 7696 Hopf bifurcations analysis of a three-dimensional nonlinear system Mircea Craioveanu, Gheorghe
1. (i) Determine how many periodic orbits and equilibria can be born at the bifurcations of the zero equilibrium of the following system:
 Determine how many periodic orbits and equilibria can be born at the bifurcations of the zero equilibrium of the following system:") 1. (i) Determine how many periodic orbits and equilibria can be born at the bifurcations of the zero equilibrium of the following system: ẋ = y x 2, ẏ = z + xy, ż = y z + x 2 xy + y 2 + z 2 x 4. (ii) Determine
1. (i) Determine how many periodic orbits and equilibria can be born at the bifurcations of the zero equilibrium of the following system: ẋ = y x 2, ẏ = z + xy, ż = y z + x 2 xy + y 2 + z 2 x 4. (ii) Determine
GEOMETRIC CONFIGURATIONS OF SINGULARITIES FOR QUADRATIC DIFFERENTIAL SYSTEMS WITH TOTAL FINITE MULTIPLICITY m f = 2
 This is a preprint of: Geometric configurations of singularities for quadratic differential systems with total finite multiplicity m f = 2, Joan Carles Artés, Jaume Llibre, Dana Schlomiuk, Nicolae Vulpe,
This is a preprint of: Geometric configurations of singularities for quadratic differential systems with total finite multiplicity m f = 2, Joan Carles Artés, Jaume Llibre, Dana Schlomiuk, Nicolae Vulpe,
GEOMETRIC CONFIGURATIONS OF SINGULARITIES FOR QUADRATIC DIFFERENTIAL SYSTEMS WITH TOTAL FINITE MULTIPLICITY m f = 2
 Electronic Journal of Differential Equations, Vol. 04 (04), No. 59, pp. 79. ISSN: 07-669. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu ftp ejde.math.txstate.edu GEOMETRIC CONFIGURATIONS
Electronic Journal of Differential Equations, Vol. 04 (04), No. 59, pp. 79. ISSN: 07-669. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu ftp ejde.math.txstate.edu GEOMETRIC CONFIGURATIONS
The Higgins-Selkov oscillator
 The Higgins-Selkov oscillator May 14, 2014 Here I analyse the long-time behaviour of the Higgins-Selkov oscillator. The system is ẋ = k 0 k 1 xy 2, (1 ẏ = k 1 xy 2 k 2 y. (2 The unknowns x and y, being
The Higgins-Selkov oscillator May 14, 2014 Here I analyse the long-time behaviour of the Higgins-Selkov oscillator. The system is ẋ = k 0 k 1 xy 2, (1 ẏ = k 1 xy 2 k 2 y. (2 The unknowns x and y, being
arxiv: v1 [math.dg] 19 Nov 2009
![arxiv: v1 [math.dg] 19 Nov 2009](/thumbs/96/128765206.jpg "arxiv: v1 [math.dg] 19 Nov 2009") GLOBAL BEHAVIOR OF THE RICCI FLOW ON HOMOGENEOUS MANIFOLDS WITH TWO ISOTROPY SUMMANDS. arxiv:09.378v [math.dg] 9 Nov 009 LINO GRAMA AND RICARDO MIRANDA MARTINS Abstract. In this paper we study the global
GLOBAL BEHAVIOR OF THE RICCI FLOW ON HOMOGENEOUS MANIFOLDS WITH TWO ISOTROPY SUMMANDS. arxiv:09.378v [math.dg] 9 Nov 009 LINO GRAMA AND RICARDO MIRANDA MARTINS Abstract. In this paper we study the global
Constructing a chaotic system with any number of equilibria
 Nonlinear Dyn (2013) 71:429 436 DOI 10.1007/s11071-012-0669-7 ORIGINAL PAPER Constructing a chaotic system with any number of equilibria Xiong Wang Guanrong Chen Received: 9 June 2012 / Accepted: 29 October
Nonlinear Dyn (2013) 71:429 436 DOI 10.1007/s11071-012-0669-7 ORIGINAL PAPER Constructing a chaotic system with any number of equilibria Xiong Wang Guanrong Chen Received: 9 June 2012 / Accepted: 29 October
Nonlinear Autonomous Dynamical systems of two dimensions. Part A
 Nonlinear Autonomous Dynamical systems of two dimensions Part A Nonlinear Autonomous Dynamical systems of two dimensions x f ( x, y), x(0) x vector field y g( xy, ), y(0) y F ( f, g) 0 0 f, g are continuous
Nonlinear Autonomous Dynamical systems of two dimensions Part A Nonlinear Autonomous Dynamical systems of two dimensions x f ( x, y), x(0) x vector field y g( xy, ), y(0) y F ( f, g) 0 0 f, g are continuous
SUBTANGENT-LIKE STATISTICAL MANIFOLDS. 1. Introduction
 SUBTANGENT-LIKE STATISTICAL MANIFOLDS A. M. BLAGA Abstract. Subtangent-like statistical manifolds are introduced and characterization theorems for them are given. The special case when the conjugate connections
SUBTANGENT-LIKE STATISTICAL MANIFOLDS A. M. BLAGA Abstract. Subtangent-like statistical manifolds are introduced and characterization theorems for them are given. The special case when the conjugate connections
Symplectic and Poisson Manifolds
 Symplectic and Poisson Manifolds Harry Smith In this survey we look at the basic definitions relating to symplectic manifolds and Poisson manifolds and consider different examples of these. We go on to
Symplectic and Poisson Manifolds Harry Smith In this survey we look at the basic definitions relating to symplectic manifolds and Poisson manifolds and consider different examples of these. We go on to
arxiv: v1 [math.ds] 27 Jul 2017
![arxiv: v1 [math.ds] 27 Jul 2017](/thumbs/96/128497858.jpg "arxiv: v1 [math.ds] 27 Jul 2017") POLYNOMIAL VECTOR FIELDS ON THE CLIFFORD TORUS arxiv:1707.08859v1 [math.ds] 27 Jul 2017 JAUME LLIBRE AND ADRIAN C. MURZA Abstract. First we characterize all the polynomial vector fields in R 4 which have
POLYNOMIAL VECTOR FIELDS ON THE CLIFFORD TORUS arxiv:1707.08859v1 [math.ds] 27 Jul 2017 JAUME LLIBRE AND ADRIAN C. MURZA Abstract. First we characterize all the polynomial vector fields in R 4 which have
LIE ALGEBROIDS AND POISSON GEOMETRY, OLIVETTI SEMINAR NOTES
 LIE ALGEBROIDS AND POISSON GEOMETRY, OLIVETTI SEMINAR NOTES BENJAMIN HOFFMAN 1. Outline Lie algebroids are the infinitesimal counterpart of Lie groupoids, which generalize how we can talk about symmetries
LIE ALGEBROIDS AND POISSON GEOMETRY, OLIVETTI SEMINAR NOTES BENJAMIN HOFFMAN 1. Outline Lie algebroids are the infinitesimal counterpart of Lie groupoids, which generalize how we can talk about symmetries
Dynamical systems on Leibniz algebroids
 Dynamical systems on Leibniz algebroids Gheorghe Ivan and Dumitru Opriş Abstract. In this paper we study the differential systems on Leibniz algebroids. We introduce a class of almost metriplectic manifolds
Dynamical systems on Leibniz algebroids Gheorghe Ivan and Dumitru Opriş Abstract. In this paper we study the differential systems on Leibniz algebroids. We introduce a class of almost metriplectic manifolds
Cocycles and stream functions in quasigeostrophic motion
 Journal of Nonlinear Mathematical Physics Volume 15, Number 2 (2008), 140 146 Letter Cocycles and stream functions in quasigeostrophic motion Cornelia VIZMAN West University of Timişoara, Romania E-mail:
Journal of Nonlinear Mathematical Physics Volume 15, Number 2 (2008), 140 146 Letter Cocycles and stream functions in quasigeostrophic motion Cornelia VIZMAN West University of Timişoara, Romania E-mail:
Hamilton-Jacobi theory on Lie algebroids: Applications to nonholonomic mechanics. Manuel de León Institute of Mathematical Sciences CSIC, Spain
 Hamilton-Jacobi theory on Lie algebroids: Applications to nonholonomic mechanics Manuel de León Institute of Mathematical Sciences CSIC, Spain joint work with J.C. Marrero (University of La Laguna) D.
Hamilton-Jacobi theory on Lie algebroids: Applications to nonholonomic mechanics Manuel de León Institute of Mathematical Sciences CSIC, Spain joint work with J.C. Marrero (University of La Laguna) D.
On Quadratic Hamilton-Poisson Systems
 On Quadratic Hamilton-Poisson Systems Rory Biggs and Claudiu C. Remsing Department of Mathematics (Pure and Applied) Rhodes University, Grahamstown 6140, South Africa Geometry, Integrability & Quantization
On Quadratic Hamilton-Poisson Systems Rory Biggs and Claudiu C. Remsing Department of Mathematics (Pure and Applied) Rhodes University, Grahamstown 6140, South Africa Geometry, Integrability & Quantization
The moduli space of binary quintics
 The moduli space of binary quintics A.A.du Plessis and C.T.C.Wall November 10, 2005 1 Invariant theory From classical invariant theory (we refer to the version in [2]), we find that the ring of (SL 2 )invariants
The moduli space of binary quintics A.A.du Plessis and C.T.C.Wall November 10, 2005 1 Invariant theory From classical invariant theory (we refer to the version in [2]), we find that the ring of (SL 2 )invariants
APPPHYS217 Tuesday 25 May 2010
 APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
Introduction (Lecture 1)
") Introduction (Lecture 1) February 2, 2011 In this course, we will be concerned with variations on the following: Question 1. Let X be a CW complex. When does there exist a homotopy equivalence X M, where
Introduction (Lecture 1) February 2, 2011 In this course, we will be concerned with variations on the following: Question 1. Let X be a CW complex. When does there exist a homotopy equivalence X M, where
2. Intersection Multiplicities
 2. Intersection Multiplicities 11 2. Intersection Multiplicities Let us start our study of curves by introducing the concept of intersection multiplicity, which will be central throughout these notes.
2. Intersection Multiplicities 11 2. Intersection Multiplicities Let us start our study of curves by introducing the concept of intersection multiplicity, which will be central throughout these notes.
Introduction Curves Surfaces Curves on surfaces. Curves and surfaces. Ragni Piene Centre of Mathematics for Applications, University of Oslo, Norway
 Curves and surfaces Ragni Piene Centre of Mathematics for Applications, University of Oslo, Norway What is algebraic geometry? IMA, April 13, 2007 Outline Introduction Curves Surfaces Curves on surfaces
Curves and surfaces Ragni Piene Centre of Mathematics for Applications, University of Oslo, Norway What is algebraic geometry? IMA, April 13, 2007 Outline Introduction Curves Surfaces Curves on surfaces
Each is equal to CP 1 minus one point, which is the origin of the other: (C =) U 1 = CP 1 the line λ (1, 0) U 0
 U 1 = CP 1 the line λ (1, 0) U 0") Algebraic Curves/Fall 2015 Aaron Bertram 1. Introduction. What is a complex curve? (Geometry) It s a Riemann surface, that is, a compact oriented twodimensional real manifold Σ with a complex structure.
Algebraic Curves/Fall 2015 Aaron Bertram 1. Introduction. What is a complex curve? (Geometry) It s a Riemann surface, that is, a compact oriented twodimensional real manifold Σ with a complex structure.
UNIVERSIDADE DE SÃO PAULO
 UNIVERSIDADE DE SÃO PAULO Instituto de Ciências Matemáticas e de Computação ISSN 0103-2577 GLOBAL DYNAMICAL ASPECTS OF A GENERALIZED CHEN-WANG DIFFERENTIAL SYSTEM REGILENE D. S. OLIVEIRA CLAUDIA VALLS
UNIVERSIDADE DE SÃO PAULO Instituto de Ciências Matemáticas e de Computação ISSN 0103-2577 GLOBAL DYNAMICAL ASPECTS OF A GENERALIZED CHEN-WANG DIFFERENTIAL SYSTEM REGILENE D. S. OLIVEIRA CLAUDIA VALLS
EE222 - Spring 16 - Lecture 2 Notes 1
 EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
Geometry of subanalytic and semialgebraic sets, by M. Shiota, Birkhäuser, Boston, MA, 1997, xii+431 pp., $89.50, ISBN
 BULLETIN (New Series) OF THE AMERICAN MATHEMATICAL SOCIETY Volume 36, Number 4, ages 523 527 S 0273-0979(99)00793-4 Article electronically published on July 27, 1999 Geometry of subanalytic and semialgebraic
BULLETIN (New Series) OF THE AMERICAN MATHEMATICAL SOCIETY Volume 36, Number 4, ages 523 527 S 0273-0979(99)00793-4 Article electronically published on July 27, 1999 Geometry of subanalytic and semialgebraic
Introduction to Arithmetic Geometry Fall 2013 Lecture #23 11/26/2013
 18.782 Introduction to Arithmetic Geometry Fall 2013 Lecture #23 11/26/2013 As usual, a curve is a smooth projective (geometrically irreducible) variety of dimension one and k is a perfect field. 23.1
18.782 Introduction to Arithmetic Geometry Fall 2013 Lecture #23 11/26/2013 As usual, a curve is a smooth projective (geometrically irreducible) variety of dimension one and k is a perfect field. 23.1
Solutions to the Hamilton-Jacobi equation as Lagrangian submanifolds
 Solutions to the Hamilton-Jacobi equation as Lagrangian submanifolds Matias Dahl January 2004 1 Introduction In this essay we shall study the following problem: Suppose is a smooth -manifold, is a function,
Solutions to the Hamilton-Jacobi equation as Lagrangian submanifolds Matias Dahl January 2004 1 Introduction In this essay we shall study the following problem: Suppose is a smooth -manifold, is a function,
BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs
 BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits. 2. Equilibria. 3. Periodic orbits and limit cycles. 4. Homoclinic orbits.
BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits. 2. Equilibria. 3. Periodic orbits and limit cycles. 4. Homoclinic orbits.
7 Planar systems of linear ODE
 7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
A MARSDEN WEINSTEIN REDUCTION THEOREM FOR PRESYMPLECTIC MANIFOLDS
 A MARSDEN WEINSTEIN REDUCTION THEOREM FOR PRESYMPLECTIC MANIFOLDS FRANCESCO BOTTACIN Abstract. In this paper we prove an analogue of the Marsden Weinstein reduction theorem for presymplectic actions of
A MARSDEN WEINSTEIN REDUCTION THEOREM FOR PRESYMPLECTIC MANIFOLDS FRANCESCO BOTTACIN Abstract. In this paper we prove an analogue of the Marsden Weinstein reduction theorem for presymplectic actions of
Stability and bifurcation in a two species predator-prey model with quintic interactions
 Chaotic Modeling and Simulation (CMSIM) 4: 631 635, 2013 Stability and bifurcation in a two species predator-prey model with quintic interactions I. Kusbeyzi Aybar 1 and I. acinliyan 2 1 Department of
Chaotic Modeling and Simulation (CMSIM) 4: 631 635, 2013 Stability and bifurcation in a two species predator-prey model with quintic interactions I. Kusbeyzi Aybar 1 and I. acinliyan 2 1 Department of
A crash course the geometry of hyperbolic surfaces
 Lecture 7 A crash course the geometry of hyperbolic surfaces 7.1 The hyperbolic plane Hyperbolic geometry originally developed in the early 19 th century to prove that the parallel postulate in Euclidean
Lecture 7 A crash course the geometry of hyperbolic surfaces 7.1 The hyperbolic plane Hyperbolic geometry originally developed in the early 19 th century to prove that the parallel postulate in Euclidean
HIGHER ORDER CRITERION FOR THE NONEXISTENCE OF FORMAL FIRST INTEGRAL FOR NONLINEAR SYSTEMS. 1. Introduction
 Electronic Journal of Differential Equations, Vol. 217 (217), No. 274, pp. 1 11. ISSN: 172-6691. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu HIGHER ORDER CRITERION FOR THE NONEXISTENCE
Electronic Journal of Differential Equations, Vol. 217 (217), No. 274, pp. 1 11. ISSN: 172-6691. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu HIGHER ORDER CRITERION FOR THE NONEXISTENCE
Totally Marked Rational Maps. John Milnor. Stony Brook University. ICERM, April 20, 2012 [ ANNOTATED VERSION]
![Totally Marked Rational Maps. John Milnor. Stony Brook University. ICERM, April 20, 2012 [ ANNOTATED VERSION]](/thumbs/88/116967948.jpg "Totally Marked Rational Maps. John Milnor. Stony Brook University. ICERM, April 20, 2012 [ ANNOTATED VERSION]") Totally Marked Rational Maps John Milnor Stony Brook University ICERM, April 20, 2012 [ ANNOTATED VERSION] Rational maps of degree d 2. (Mostly d = 2.) Let K be an algebraically closed field of characteristic
Totally Marked Rational Maps John Milnor Stony Brook University ICERM, April 20, 2012 [ ANNOTATED VERSION] Rational maps of degree d 2. (Mostly d = 2.) Let K be an algebraically closed field of characteristic
THE NEARLY ADDITIVE MAPS
 Bull. Korean Math. Soc. 46 (009), No., pp. 199 07 DOI 10.4134/BKMS.009.46..199 THE NEARLY ADDITIVE MAPS Esmaeeil Ansari-Piri and Nasrin Eghbali Abstract. This note is a verification on the relations between
Bull. Korean Math. Soc. 46 (009), No., pp. 199 07 DOI 10.4134/BKMS.009.46..199 THE NEARLY ADDITIVE MAPS Esmaeeil Ansari-Piri and Nasrin Eghbali Abstract. This note is a verification on the relations between
274 Curves on Surfaces, Lecture 4
 274 Curves on Surfaces, Lecture 4 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 4 Hyperbolic geometry Last time there was an exercise asking for braids giving the torsion elements in PSL 2 (Z). A 3-torsion
274 Curves on Surfaces, Lecture 4 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 4 Hyperbolic geometry Last time there was an exercise asking for braids giving the torsion elements in PSL 2 (Z). A 3-torsion
A Survey of Singular Reduction
 A Survey of Singular Reduction Yusuf Barış Kartal 1 Introduction Reduction of a classical system with symmetries was known even at the times of Euler and Jacobi. However, it had not been formalized before
A Survey of Singular Reduction Yusuf Barış Kartal 1 Introduction Reduction of a classical system with symmetries was known even at the times of Euler and Jacobi. However, it had not been formalized before
PROBLEMS, MATH 214A. Affine and quasi-affine varieties
 PROBLEMS, MATH 214A k is an algebraically closed field Basic notions Affine and quasi-affine varieties 1. Let X A 2 be defined by x 2 + y 2 = 1 and x = 1. Find the ideal I(X). 2. Prove that the subset
PROBLEMS, MATH 214A k is an algebraically closed field Basic notions Affine and quasi-affine varieties 1. Let X A 2 be defined by x 2 + y 2 = 1 and x = 1. Find the ideal I(X). 2. Prove that the subset
Math 147, Homework 1 Solutions Due: April 10, 2012
 1. For what values of a is the set: Math 147, Homework 1 Solutions Due: April 10, 2012 M a = { (x, y, z) : x 2 + y 2 z 2 = a } a smooth manifold? Give explicit parametrizations for open sets covering M
1. For what values of a is the set: Math 147, Homework 1 Solutions Due: April 10, 2012 M a = { (x, y, z) : x 2 + y 2 z 2 = a } a smooth manifold? Give explicit parametrizations for open sets covering M
Chern numbers and Hilbert Modular Varieties
 Chern numbers and Hilbert Modular Varieties Dylan Attwell-Duval Department of Mathematics and Statistics McGill University Montreal, Quebec attwellduval@math.mcgill.ca April 9, 2011 A Topological Point
Chern numbers and Hilbert Modular Varieties Dylan Attwell-Duval Department of Mathematics and Statistics McGill University Montreal, Quebec attwellduval@math.mcgill.ca April 9, 2011 A Topological Point
2.10 Saddles, Nodes, Foci and Centers
 2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
Hamiltonian Dynamics
 Hamiltonian Dynamics CDS 140b Joris Vankerschaver jv@caltech.edu CDS Feb. 10, 2009 Joris Vankerschaver (CDS) Hamiltonian Dynamics Feb. 10, 2009 1 / 31 Outline 1. Introductory concepts; 2. Poisson brackets;
Hamiltonian Dynamics CDS 140b Joris Vankerschaver jv@caltech.edu CDS Feb. 10, 2009 Joris Vankerschaver (CDS) Hamiltonian Dynamics Feb. 10, 2009 1 / 31 Outline 1. Introductory concepts; 2. Poisson brackets;
Seminar Geometrical aspects of theoretical mechanics
 Seminar Geometrical aspects of theoretical mechanics Topics 1. Manifolds 29.10.12 Gisela Baños-Ros 2. Vector fields 05.11.12 and 12.11.12 Alexander Holm and Matthias Sievers 3. Differential forms 19.11.12,
Seminar Geometrical aspects of theoretical mechanics Topics 1. Manifolds 29.10.12 Gisela Baños-Ros 2. Vector fields 05.11.12 and 12.11.12 Alexander Holm and Matthias Sievers 3. Differential forms 19.11.12,
Maslov indices and monodromy
 Loughborough University Institutional Repository Maslov indices and monodromy This item was submitted to Loughborough University's Institutional Repository by the/an author. Additional Information: This
Loughborough University Institutional Repository Maslov indices and monodromy This item was submitted to Loughborough University's Institutional Repository by the/an author. Additional Information: This
Geometric control and dynamical systems
 Université de Nice - Sophia Antipolis & Institut Universitaire de France 9th AIMS International Conference on Dynamical Systems, Differential Equations and Applications Control of an inverted pendulum
Université de Nice - Sophia Antipolis & Institut Universitaire de France 9th AIMS International Conference on Dynamical Systems, Differential Equations and Applications Control of an inverted pendulum
arxiv: v1 [math.ap] 25 Aug 2009
![arxiv: v1 [math.ap] 25 Aug 2009](/thumbs/89/99243941.jpg "arxiv: v1 [math.ap] 25 Aug 2009") Lie group analysis of Poisson s equation and optimal system of subalgebras for Lie algebra of 3 dimensional rigid motions arxiv:0908.3619v1 [math.ap] 25 Aug 2009 Abstract M. Nadjafikhah a, a School of
Lie group analysis of Poisson s equation and optimal system of subalgebras for Lie algebra of 3 dimensional rigid motions arxiv:0908.3619v1 [math.ap] 25 Aug 2009 Abstract M. Nadjafikhah a, a School of
Conservation laws for the geodesic equations of the canonical connection on Lie groups in dimensions two and three
 Appl Math Inf Sci 7 No 1 311-318 (013) 311 Applied Mathematics & Information Sciences An International Journal Conservation laws for the geodesic equations of the canonical connection on Lie groups in
Appl Math Inf Sci 7 No 1 311-318 (013) 311 Applied Mathematics & Information Sciences An International Journal Conservation laws for the geodesic equations of the canonical connection on Lie groups in
0. Introduction 1 0. INTRODUCTION
 0. Introduction 1 0. INTRODUCTION In a very rough sketch we explain what algebraic geometry is about and what it can be used for. We stress the many correlations with other fields of research, such as
0. Introduction 1 0. INTRODUCTION In a very rough sketch we explain what algebraic geometry is about and what it can be used for. We stress the many correlations with other fields of research, such as
Analysis of the Takens-Bogdanov bifurcation on m parameterized vector fields
 Analysis of the Takens-Bogdanov bifurcation on m parameterized vector fields Francisco Armando Carrillo Navarro, Fernando Verduzco G., Joaquín Delgado F. Programa de Doctorado en Ciencias (Matemáticas),
Analysis of the Takens-Bogdanov bifurcation on m parameterized vector fields Francisco Armando Carrillo Navarro, Fernando Verduzco G., Joaquín Delgado F. Programa de Doctorado en Ciencias (Matemáticas),
Periodic orbits of planar integrable birational maps.
 Periodic orbits of planar integrable birational maps. Víctor Mañosa Departament de Matemàtica Aplicada III Control, Dynamics and Applications Group (CoDALab) Universitat Politècnica de Catalunya. NOMA
Periodic orbits of planar integrable birational maps. Víctor Mañosa Departament de Matemàtica Aplicada III Control, Dynamics and Applications Group (CoDALab) Universitat Politècnica de Catalunya. NOMA
Toroidal Embeddings and Desingularization
 California State University, San Bernardino CSUSB ScholarWorks Electronic Theses, Projects, and Dissertations Office of Graduate Studies 6-2018 Toroidal Embeddings and Desingularization LEON NGUYEN 003663425@coyote.csusb.edu
California State University, San Bernardino CSUSB ScholarWorks Electronic Theses, Projects, and Dissertations Office of Graduate Studies 6-2018 Toroidal Embeddings and Desingularization LEON NGUYEN 003663425@coyote.csusb.edu
An introduction to Birkhoff normal form
 An introduction to Birkhoff normal form Dario Bambusi Dipartimento di Matematica, Universitá di Milano via Saldini 50, 0133 Milano (Italy) 19.11.14 1 Introduction The aim of this note is to present an
An introduction to Birkhoff normal form Dario Bambusi Dipartimento di Matematica, Universitá di Milano via Saldini 50, 0133 Milano (Italy) 19.11.14 1 Introduction The aim of this note is to present an
Chini Equations and Isochronous Centers in Three-Dimensional Differential Systems
 Qual. Th. Dyn. Syst. 99 (9999), 1 1 1575-546/99-, DOI 1.17/s12346-3- c 29 Birkhäuser Verlag Basel/Switzerland Qualitative Theory of Dynamical Systems Chini Equations and Isochronous Centers in Three-Dimensional
Qual. Th. Dyn. Syst. 99 (9999), 1 1 1575-546/99-, DOI 1.17/s12346-3- c 29 Birkhäuser Verlag Basel/Switzerland Qualitative Theory of Dynamical Systems Chini Equations and Isochronous Centers in Three-Dimensional
Algebraic Expressions
 Algebraic Expressions 1. Expressions are formed from variables and constants. 2. Terms are added to form expressions. Terms themselves are formed as product of factors. 3. Expressions that contain exactly
Algebraic Expressions 1. Expressions are formed from variables and constants. 2. Terms are added to form expressions. Terms themselves are formed as product of factors. 3. Expressions that contain exactly
On implicit Lagrangian differential systems
 ANNALES POLONICI MATHEMATICI LXXIV (2000) On implicit Lagrangian differential systems by S. Janeczko (Warszawa) Bogdan Ziemian in memoriam Abstract. Let (P, ω) be a symplectic manifold. We find an integrability
ANNALES POLONICI MATHEMATICI LXXIV (2000) On implicit Lagrangian differential systems by S. Janeczko (Warszawa) Bogdan Ziemian in memoriam Abstract. Let (P, ω) be a symplectic manifold. We find an integrability
LECTURE 28: VECTOR BUNDLES AND FIBER BUNDLES
 LECTURE 28: VECTOR BUNDLES AND FIBER BUNDLES 1. Vector Bundles In general, smooth manifolds are very non-linear. However, there exist many smooth manifolds which admit very nice partial linear structures.
LECTURE 28: VECTOR BUNDLES AND FIBER BUNDLES 1. Vector Bundles In general, smooth manifolds are very non-linear. However, there exist many smooth manifolds which admit very nice partial linear structures.
1 Hermitian symmetric spaces: examples and basic properties
 Contents 1 Hermitian symmetric spaces: examples and basic properties 1 1.1 Almost complex manifolds............................................ 1 1.2 Hermitian manifolds................................................
Contents 1 Hermitian symmetric spaces: examples and basic properties 1 1.1 Almost complex manifolds............................................ 1 1.2 Hermitian manifolds................................................
LECTURE: KOBORDISMENTHEORIE, WINTER TERM 2011/12; SUMMARY AND LITERATURE
 LECTURE: KOBORDISMENTHEORIE, WINTER TERM 2011/12; SUMMARY AND LITERATURE JOHANNES EBERT 1.1. October 11th. 1. Recapitulation from differential topology Definition 1.1. Let M m, N n, be two smooth manifolds
LECTURE: KOBORDISMENTHEORIE, WINTER TERM 2011/12; SUMMARY AND LITERATURE JOHANNES EBERT 1.1. October 11th. 1. Recapitulation from differential topology Definition 1.1. Let M m, N n, be two smooth manifolds
Manoj K. Keshari 1 and Satya Mandal 2.
 K 0 of hypersurfaces defined by x 2 1 +... + x 2 n = ±1 Manoj K. Keshari 1 and Satya Mandal 2 1 Department of Mathematics, IIT Mumbai, Mumbai - 400076, India 2 Department of Mathematics, University of
K 0 of hypersurfaces defined by x 2 1 +... + x 2 n = ±1 Manoj K. Keshari 1 and Satya Mandal 2 1 Department of Mathematics, IIT Mumbai, Mumbai - 400076, India 2 Department of Mathematics, University of
AMADEU DELSHAMS AND RAFAEL RAMíREZ-ROS
 POINCARÉ-MELNIKOV-ARNOLD METHOD FOR TWIST MAPS AMADEU DELSHAMS AND RAFAEL RAMíREZ-ROS 1. Introduction A general theory for perturbations of an integrable planar map with a separatrix to a hyperbolic fixed
POINCARÉ-MELNIKOV-ARNOLD METHOD FOR TWIST MAPS AMADEU DELSHAMS AND RAFAEL RAMíREZ-ROS 1. Introduction A general theory for perturbations of an integrable planar map with a separatrix to a hyperbolic fixed
1. Introduction and statement of main results. dy dt. = p(x, y),
,") ALGORITHM FOR DETERMINING THE GLOBAL GEOMETRIC CONFIGURATIONS OF SINGULARITIES OF QUADRATIC DIFFERENTIAL SYSTEMS WITH THREE DISTINCT REAL SIMPLE FINITE SINGULARITIES JOAN C. ARTÉS1, JAUME LLIBRE 1, DANA
ALGORITHM FOR DETERMINING THE GLOBAL GEOMETRIC CONFIGURATIONS OF SINGULARITIES OF QUADRATIC DIFFERENTIAL SYSTEMS WITH THREE DISTINCT REAL SIMPLE FINITE SINGULARITIES JOAN C. ARTÉS1, JAUME LLIBRE 1, DANA
Globalization and compactness of McCrory Parusiński conditions. Riccardo Ghiloni 1
 Globalization and compactness of McCrory Parusiński conditions Riccardo Ghiloni 1 Department of Mathematics, University of Trento, 38050 Povo, Italy ghiloni@science.unitn.it Abstract Let X R n be a closed
Globalization and compactness of McCrory Parusiński conditions Riccardo Ghiloni 1 Department of Mathematics, University of Trento, 38050 Povo, Italy ghiloni@science.unitn.it Abstract Let X R n be a closed
LECTURE 16: LIE GROUPS AND THEIR LIE ALGEBRAS. 1. Lie groups
 LECTURE 16: LIE GROUPS AND THEIR LIE ALGEBRAS 1. Lie groups A Lie group is a special smooth manifold on which there is a group structure, and moreover, the two structures are compatible. Lie groups are
LECTURE 16: LIE GROUPS AND THEIR LIE ALGEBRAS 1. Lie groups A Lie group is a special smooth manifold on which there is a group structure, and moreover, the two structures are compatible. Lie groups are
Course 311: Michaelmas Term 2005 Part III: Topics in Commutative Algebra
 Course 311: Michaelmas Term 2005 Part III: Topics in Commutative Algebra D. R. Wilkins Contents 3 Topics in Commutative Algebra 2 3.1 Rings and Fields......................... 2 3.2 Ideals...............................
Course 311: Michaelmas Term 2005 Part III: Topics in Commutative Algebra D. R. Wilkins Contents 3 Topics in Commutative Algebra 2 3.1 Rings and Fields......................... 2 3.2 Ideals...............................
LECTURE 6: J-HOLOMORPHIC CURVES AND APPLICATIONS
 LECTURE 6: J-HOLOMORPHIC CURVES AND APPLICATIONS WEIMIN CHEN, UMASS, SPRING 07 1. Basic elements of J-holomorphic curve theory Let (M, ω) be a symplectic manifold of dimension 2n, and let J J (M, ω) be
LECTURE 6: J-HOLOMORPHIC CURVES AND APPLICATIONS WEIMIN CHEN, UMASS, SPRING 07 1. Basic elements of J-holomorphic curve theory Let (M, ω) be a symplectic manifold of dimension 2n, and let J J (M, ω) be
LIMIT CYCLES FOR A CLASS OF ELEVENTH Z 12 -EQUIVARIANT SYSTEMS WITHOUT INFINITE CRITICAL POINTS
 LIMIT CYCLES FOR A CLASS OF ELEVENTH Z 1 -EQUIVARIANT SYSTEMS WITHOUT INFINITE CRITICAL POINTS ADRIAN C. MURZA Communicated by Vasile Brînzănescu We analyze the complex dynamics of a family of Z 1-equivariant
LIMIT CYCLES FOR A CLASS OF ELEVENTH Z 1 -EQUIVARIANT SYSTEMS WITHOUT INFINITE CRITICAL POINTS ADRIAN C. MURZA Communicated by Vasile Brînzănescu We analyze the complex dynamics of a family of Z 1-equivariant
A Cantor set of tori with monodromy near a focus focus singularity
 INSTITUTE OF PHYSICS PUBLISHING Nonlinearity 17 (2004) 1 10 NONLINEARITY PII: S0951-7715(04)65776-8 A Cantor set of tori with monodromy near a focus focus singularity Bob Rink Mathematics Institute, Utrecht
INSTITUTE OF PHYSICS PUBLISHING Nonlinearity 17 (2004) 1 10 NONLINEARITY PII: S0951-7715(04)65776-8 A Cantor set of tori with monodromy near a focus focus singularity Bob Rink Mathematics Institute, Utrecht
A DECOMPOSITION FORMULA FOR EQUIVARIANT STABLE HOMOTOPY CLASSES
 A DECOMPOSITION FORMULA FOR EQUIARIANT STABLE HOMOTOPY CLASSES WAC LAW MARZANTOWICZ AND CARLOS PRIETO Dedicated to Albrecht Dold and Ed Fadell Abstract. For any compact Lie group G, we give a decomposition
A DECOMPOSITION FORMULA FOR EQUIARIANT STABLE HOMOTOPY CLASSES WAC LAW MARZANTOWICZ AND CARLOS PRIETO Dedicated to Albrecht Dold and Ed Fadell Abstract. For any compact Lie group G, we give a decomposition
MORSE THEORY DAN BURGHELEA. Department of Mathematics The Ohio State University
 MORSE THEORY DAN BURGHELEA Department of Mathematics The Ohio State University 1 Morse Theory begins with the modest task of understanding the local maxima, minima and sadle points of a smooth function
MORSE THEORY DAN BURGHELEA Department of Mathematics The Ohio State University 1 Morse Theory begins with the modest task of understanding the local maxima, minima and sadle points of a smooth function
A Mathematical Trivium
 A Mathematical Trivium V.I. Arnold 1991 1. Sketch the graph of the derivative and the graph of the integral of a function given by a freehand graph. 2. Find the limit lim x 0 sin tan x tan sin x arcsin
A Mathematical Trivium V.I. Arnold 1991 1. Sketch the graph of the derivative and the graph of the integral of a function given by a freehand graph. 2. Find the limit lim x 0 sin tan x tan sin x arcsin
Ordinary Differential Equations and Smooth Dynamical Systems
 D.V. Anosov S.Kh. Aranson V.l. Arnold I.U. Bronshtein V.Z. Grines Yu.S. Il'yashenko Ordinary Differential Equations and Smooth Dynamical Systems With 25 Figures Springer I. Ordinary Differential Equations
D.V. Anosov S.Kh. Aranson V.l. Arnold I.U. Bronshtein V.Z. Grines Yu.S. Il'yashenko Ordinary Differential Equations and Smooth Dynamical Systems With 25 Figures Springer I. Ordinary Differential Equations
arxiv:math-ph/ v1 25 Feb 2002
 FROM THE TODA LATTICE TO THE VOLTERRA LATTICE AND BACK arxiv:math-ph/0202037v1 25 Feb 2002 (1) PANTELIS A DAMIANOU AND RUI LOJA FERNANDES Abstract We discuss the relationship between the multiple Hamiltonian
FROM THE TODA LATTICE TO THE VOLTERRA LATTICE AND BACK arxiv:math-ph/0202037v1 25 Feb 2002 (1) PANTELIS A DAMIANOU AND RUI LOJA FERNANDES Abstract We discuss the relationship between the multiple Hamiltonian
On the construction of discrete gradients
 On the construction of discrete gradients Elizabeth L. Mansfield School of Mathematics, Statistics and Actuarial Science, University of Kent, Canterbury, CT2 7NF, U.K. G. Reinout W. Quispel Department
On the construction of discrete gradients Elizabeth L. Mansfield School of Mathematics, Statistics and Actuarial Science, University of Kent, Canterbury, CT2 7NF, U.K. G. Reinout W. Quispel Department
THE MODULI OF SUBALGEBRAS OF THE FULL MATRIX RING OF DEGREE 3
 THE MODULI OF SUBALGEBRAS OF THE FULL MATRIX RING OF DEGREE 3 KAZUNORI NAKAMOTO AND TAKESHI TORII Abstract. There exist 26 equivalence classes of k-subalgebras of M 3 (k) for any algebraically closed field
THE MODULI OF SUBALGEBRAS OF THE FULL MATRIX RING OF DEGREE 3 KAZUNORI NAKAMOTO AND TAKESHI TORII Abstract. There exist 26 equivalence classes of k-subalgebras of M 3 (k) for any algebraically closed field
Research Article Global Dynamics of a Competitive System of Rational Difference Equations in the Plane
 Hindawi Publishing Corporation Advances in Difference Equations Volume 009 Article ID 1380 30 pages doi:101155/009/1380 Research Article Global Dynamics of a Competitive System of Rational Difference Equations
Hindawi Publishing Corporation Advances in Difference Equations Volume 009 Article ID 1380 30 pages doi:101155/009/1380 Research Article Global Dynamics of a Competitive System of Rational Difference Equations
x 9 or x > 10 Name: Class: Date: 1 How many natural numbers are between 1.5 and 4.5 on the number line?
 1 How many natural numbers are between 1.5 and 4.5 on the number line? 2 How many composite numbers are between 7 and 13 on the number line? 3 How many prime numbers are between 7 and 20 on the number
1 How many natural numbers are between 1.5 and 4.5 on the number line? 2 How many composite numbers are between 7 and 13 on the number line? 3 How many prime numbers are between 7 and 20 on the number
Nondegenerate three-dimensional complex Euclidean superintegrable systems and algebraic varieties
 JOURNAL OF MATHEMATICAL PHYSICS 48, 113518 2007 Nondegenerate three-dimensional complex Euclidean superintegrable systems and algebraic varieties E. G. Kalnins Department of Mathematics, University of
JOURNAL OF MATHEMATICAL PHYSICS 48, 113518 2007 Nondegenerate three-dimensional complex Euclidean superintegrable systems and algebraic varieties E. G. Kalnins Department of Mathematics, University of
GEOMETRIC CLASSIFICATION OF CONFIGURATIONS OF SINGULARITIES WITH TOTAL FINITE MULTIPLICITY FOUR FOR A CLASS OF QUADRATIC SYSTEMS
 This is a preprint of: Global configurations of singularities for quadratic differential systems with exactly two finite singularities of total multiplicity four, Joan Carles Artés, Jaume Llibre, Alex
This is a preprint of: Global configurations of singularities for quadratic differential systems with exactly two finite singularities of total multiplicity four, Joan Carles Artés, Jaume Llibre, Alex
2.1 Affine and Projective Coordinates
 1 Introduction Depending how you look at them, elliptic curves can be deceptively simple. Using one of the easier definitions, we are just looking at points (x,y) that satisfy a cubic equation, something
1 Introduction Depending how you look at them, elliptic curves can be deceptively simple. Using one of the easier definitions, we are just looking at points (x,y) that satisfy a cubic equation, something
EXPLICIT QUANTIZATION OF THE KEPLER MANIFOLD
 proceedings of the american mathematical Volume 77, Number 1, October 1979 society EXPLICIT QUANTIZATION OF THE KEPLER MANIFOLD ROBERT J. BLATTNER1 AND JOSEPH A. WOLF2 Abstract. Any representation ir of
proceedings of the american mathematical Volume 77, Number 1, October 1979 society EXPLICIT QUANTIZATION OF THE KEPLER MANIFOLD ROBERT J. BLATTNER1 AND JOSEPH A. WOLF2 Abstract. Any representation ir of
Math 550 / David Dumas / Fall Problems
 Math 550 / David Dumas / Fall 2014 Problems Please note: This list was last updated on November 30, 2014. Problems marked with * are challenge problems. Some problems are adapted from the course texts;
Math 550 / David Dumas / Fall 2014 Problems Please note: This list was last updated on November 30, 2014. Problems marked with * are challenge problems. Some problems are adapted from the course texts;
arxiv: v1 [math-ph] 13 Feb 2008
![arxiv: v1 [math-ph] 13 Feb 2008](/thumbs/86/94624568.jpg "arxiv: v1 [math-ph] 13 Feb 2008") Bi-Hamiltonian nature of the equation u tx = u xy u y u yy u x V. Ovsienko arxiv:0802.1818v1 [math-ph] 13 Feb 2008 Abstract We study non-linear integrable partial differential equations naturally arising
Bi-Hamiltonian nature of the equation u tx = u xy u y u yy u x V. Ovsienko arxiv:0802.1818v1 [math-ph] 13 Feb 2008 Abstract We study non-linear integrable partial differential equations naturally arising
SOME SPECIAL KLEINIAN GROUPS AND THEIR ORBIFOLDS
 Proyecciones Vol. 21, N o 1, pp. 21-50, May 2002. Universidad Católica del Norte Antofagasta - Chile SOME SPECIAL KLEINIAN GROUPS AND THEIR ORBIFOLDS RUBÉN HIDALGO Universidad Técnica Federico Santa María
Proyecciones Vol. 21, N o 1, pp. 21-50, May 2002. Universidad Católica del Norte Antofagasta - Chile SOME SPECIAL KLEINIAN GROUPS AND THEIR ORBIFOLDS RUBÉN HIDALGO Universidad Técnica Federico Santa María
A Note on Poisson Symmetric Spaces
 1 1 A Note on Poisson Symmetric Spaces Rui L. Fernandes Abstract We introduce the notion of a Poisson symmetric space and the associated infinitesimal object, a symmetric Lie bialgebra. They generalize
1 1 A Note on Poisson Symmetric Spaces Rui L. Fernandes Abstract We introduce the notion of a Poisson symmetric space and the associated infinitesimal object, a symmetric Lie bialgebra. They generalize
SYMPLECTIC MANIFOLDS, GEOMETRIC QUANTIZATION, AND UNITARY REPRESENTATIONS OF LIE GROUPS. 1. Introduction
 SYMPLECTIC MANIFOLDS, GEOMETRIC QUANTIZATION, AND UNITARY REPRESENTATIONS OF LIE GROUPS CRAIG JACKSON 1. Introduction Generally speaking, geometric quantization is a scheme for associating Hilbert spaces
SYMPLECTIC MANIFOLDS, GEOMETRIC QUANTIZATION, AND UNITARY REPRESENTATIONS OF LIE GROUPS CRAIG JACKSON 1. Introduction Generally speaking, geometric quantization is a scheme for associating Hilbert spaces
MATH 423 Linear Algebra II Lecture 3: Subspaces of vector spaces. Review of complex numbers. Vector space over a field.
 MATH 423 Linear Algebra II Lecture 3: Subspaces of vector spaces. Review of complex numbers. Vector space over a field. Vector space A vector space is a set V equipped with two operations, addition V V
MATH 423 Linear Algebra II Lecture 3: Subspaces of vector spaces. Review of complex numbers. Vector space over a field. Vector space A vector space is a set V equipped with two operations, addition V V
Andronov Hopf and Bautin bifurcation in a tritrophic food chain model with Holling functional response types IV and II
 Electronic Journal of Qualitative Theory of Differential Equations 018 No 78 1 7; https://doiorg/10143/ejqtde018178 wwwmathu-szegedhu/ejqtde/ Andronov Hopf and Bautin bifurcation in a tritrophic food chain
Electronic Journal of Qualitative Theory of Differential Equations 018 No 78 1 7; https://doiorg/10143/ejqtde018178 wwwmathu-szegedhu/ejqtde/ Andronov Hopf and Bautin bifurcation in a tritrophic food chain