Research Article Novel Distributed PZT Active Vibration Control Based on Characteristic Model for the Space Frame Structure
|
|
|
- Magdalene Parsons
- 5 years ago
- Views:
Transcription
1 Shock and Vibration Volume 6, Article ID 987, 9 pages Research Article Novel Distributed PZT Active Vibration Control Based on Characteristic Model for the Space Frame Structure Hua Zhong, Yong Wang, Hanzheng Ran, Qing Wang, and Changxing Shao InstituteofElectronicEngineering,ChinaAcademy of Engineering Physics, Mianyang 6999, China Department of Automation, University of Science and Technology of China, Hefei 37, China Correspondence should be addressed to Hua Zhong; huazhong@mail.ustc.edu.cn Received 6 July ; Revised 9 September ; Accepted September Academic Editor: Mario Terzo Copyright 6 Hua Zhong et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. A novel distributed PZT control strategy based on characteristic model is presented for space frame structure in this paper. It is a challenge to obtain the exact mechanical model for space structure, since it is a coupling MIMO plant with unknown parameters and disturbances. Thus the characteristic modeling theory is adopted to establish the needed model, which can accurately describe the dynamic characteristics of the space frame structure in real time. On basis of this model, a keep tracking controller is designed to suppress the vibration actively. It is shown that the proposed model-free method is very robust and easy to implement. To solve the complex and difficulty problem on PZT location optimization, an efficient method with modal strain energy and maximum vibration amplitude is proposed. Finally, a simulation study is conducted to investigate the effectiveness of the proposed active vibration control scheme.. Introduction Space structures are usually applied in the aerospace and civil engineering such as the space boom structures []. Generally, since space structures are light and flexible, they are sensitive to vibration which will affect the performance of space equipment []. Therefore, it is necessary to suppress vibration for space structure. Active vibration control method is a good choice for the vibration control of space structure. To achieve good vibration control performance, there are three things to be done, that is, system modelling, sensors/actuators location configuration, and control strategy design. Space structure s model can be divided into two categories: mechanical model and identification model. The mechanical model is usually established with sophisticated finite element method [3, 4]. Additionally, it is generally used in system dynamics analysis and sensors/actuators location optimization. Nonetheless, it can not be used to design controller directly due to its complexity and inaccuracy. Due to the tremendous efforts devoted by researchers, valuable resultsonidentificationmodelingforthespacestructurehave been obtained. Hwang presented an analytical procedure based on the Kalman filtering approach to estimate modal loads applied on a structure []. Hazra et al. proposed a method which integrates the blind identification with timefrequency decomposition of signals for flexible structures [6]. Schoen et al. presented an identification algorithm which utilizes modal contribution coefficients to monitor the data collection for large flexible space structures [7]. Although some aforementioned methods have been extensively used in space structure identification, there still exist several disadvantages. On the one hand, the system is inherently complicated, much less the disturbances. On the other hand, the existing results only depend on complex off-line identification methods, which is difficult to grasp the system dynamics in real time. Consequently, it is a challenge to establish the model for space structure with on-line identification method. For active vibration control of space structure, determination of actuator locations is an important work. If locations of actuators are not proper, active vibration control may not suppress the vibration, even it can increase structure vibration. Therefore, optimization of actuators locations has attracted many scholars to study. Chen et al. presented
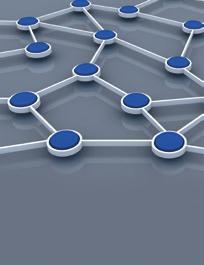
2 Shock and Vibration a location optimization approach based on the st singular value perturbations of observability and controllability [8]. Xu and Jiang demonstrated an approach with the controllability and observability index of the system [4]. Zhao et al. proposed a continuous variable optimization method to solve the optimal placement of piezoelectric active bars []. Li and Huang presented a layered optimization strategy to address location optimization problem [9]. Though the above methods can realize location optimization actuators, the optimization process is complex. Thus, it is needed to find a simple and effective optimization method. An active vibration controller with simple structure and strong robustness is necessary. Many scholars have devoted themselves to solving this problem. Luo et al. designed simple PD controller for vibration attenuation in Hoop truss structure []. Abreu et al. used a standard H robust controller to suppress structural vibrations []. Yang et al. presented an adaptive fuzzy sliding mode controller for vibration of a flexible rectangular plate []. Lin and Zheng proposed a parallel neurofuzzy control with genetic algorithm tuning for smart piezoelectric rotating truss structure [3]. de Abreu et al. designed a self-organizing fuzzy controller for vibration control of smart truss structure []. Mahmoodi developed a modified positive position feedback controller for vibration control [4]. Wilhelm and Rajamani applied LQR controller to realize multimodal vibration suppression []. Among above control strategies, simple controllers (such as PID) are with weak robustness. The complex controllers (H controller, fuzzy controller) have strong robustness, but they have difficulty in parameter tuning. Motivated by the above discussions, a novel distributed PZT control based on characteristic model is presented. Characteristic model for space structure is established to accurately describe system s dynamics in time whose form is simple and characteristic parameters of it can contain the information of time delay or high order [6]. Additionally, a simple controller based on characteristic model called keep tracking controller with strong robustness is applied to realize vibration control. Furthermore, a novel actuators location optimization method with modal strain energy () and maximum vibration amplitude is proposed. The remainder of the paper is organized as follows. Section establishes the characteristic model for space structure. Section 3 presents the identification of characteristic parameters and control strategy. PZT location optimization is presented in Section 4. Numerical simulation is shown in Section. Conclusion is shown in Section 6.. Characteristic Modeling for Space Structure The space frame structure is shown in Figure which contains 6 nodes and 63 beam elements. Nodes, 3, 7, and 8 are constrained which are fixed with the floor. Structure excitation direction is z of node. Every node has 6 degrees of freedom (DOF). The total DOF is n.thespacestructurehas 63 beam elements. Table shows the connection information among nodes. Space structure consists of aluminum whose crosssectionisrectangular.tableshowsthetopnatural frequencies. Z 6 Y X Figure : The schematic diagram of frame structure. According to the finite element formulation, the equation of motion for any structure is given by 7 7 M X + C X + KX = F, () where M R n n is mass matrix, C R n n is damping matrix, K R n n is stiffness matrix, F R n is load force vector, and X R n, X R n,andx R n are structural displacement, velocity, and acceleration vectors, respectively. With the knowledge of space frame, parameters M, C, and K are slow time-varying. Then, during short sampling time Δt (ms), it can be considered that M, C,andKare timeinvariant. Then the discrete form of motion equation () can be described as MX (k+) =(M CΔt KΔt ) X (k) ( M + CΔt) X (k ) +Δt F (k). One has the upper equation () as X (k+) = G (k) X (k) + G (k) X (k ) + H (k) F (k), where G (k) = I n M CΔt M KΔt, G (k) = I n + M CΔt, andh (k) = Δt M. The expression (3) is called characteristic model; G (k), G (k), andh (k) are characteristic parameters. When Δt is very small, the following equation holds: G ( ) =I n, G ( ) = I n, H ( ) = n n. Further one has the sum of characteristic parameters as 6 6 () (3) (4) G ( ) + G ( ) + H ( ) = I n. ()
3 Shock and Vibration 3 Table : Beam element connection information. Node number Table : Continued. Node number Assuming the output X(k) loops are decoupled, thus G (k) and G (k) are diagonal matrixes, which can be formulated as g (k) g (k) G (k) = [.. d.,. ] [ g n (k)] g (k) g (k). G (k) =. [.. d ] [ g n (k)] The characteristic parameter H (k) canbewrittenas (6) h (k) h (k) h n (k) h (k) h (k) h n (k) H (k) = [.. d.. (7). ] [ h n (k) h n (k) h nn (k)] According to the expression in (3) and (6)-(7), the ith characteristic model is x i (k+) =g i (k) x i (k) +g i (k) x i (k ) n + h ir (k) F r (k). r= (8)
4 4 Shock and Vibration Table : Top natural frequencies. Order Frequency (Hz) PZT PZT PZT3 Al beam The range of λ and λ is <λ <, <λ <4.Theestimates of g i (k), g i (k), andh ii (k) in the characteristic model are θ T (k) = [ g i (k) g i (k) ĥii(k)]. To ensure the output y(k+)equals the desired reference input r(k+), the need control input should satisfy the following condition: Figure : The schematic diagram of PZT structure. Similarly,onehasthecharactersofcharacteristicparameters in ith output loop as g i ( ) =, g i ( ) =, h ir ( ) =, g i ( ) +g i ( ) + h ir ( ) =. Because PZT with small size and light weight does not affect structure s characteristics after pasting on the structure surface,pztisselectedassensorandactuator.figure indicates the schematic diagram of PZT structure. It is shown that a pair of PZT and PZT act as actuator and another PZT3 acts as sensor. Additionally, actuators far away PZT3 have little function on PZT3. Therefore, (8) can be simplified as n r= x i (k+) =g i (k) x i (k) +g i (k) x i (k ) +h ii (k) F i (k) = Φ T (k) θ (k), (9) () where Φ(k) = [x i (k) x i (k ) F i (k)] T and θ(k) = [g i (k) g i (k ) h ii (k)] T. 3. Keep Tracking Control Law With a proper parameter estimator, the characteristic parameters can adaptively converge to true values. The general methods of parameters identification are least square method and gradient method. Compared with the least square method, gradient method has a smaller amount of calculation and it will not cause parameters to diverge with improper forgetting factors. Thus, the gradient method [6] will be used to estimate the characteristic parameters. The form is θ (k) = λ Φ (k ) [x i (k) Φ T (k ) θ (k )] Φ T (k ) Φ (k ) +λ + θ (k ). () u (k) = r (k+) g i (k) y (k) g i (k) y (k ). () ĥ ii (k) To avoid the fact of ĥii() =, a slack variable λ is introduced, which could guarantee that the control input is smooth and easy to implement. Consider u (k) = r (k+) g i (k) y (k) g i (k) y (k ), (3) λ+ĥii (k) where λ is a constant. This control law is called characteristic model-based keep tracking control (CMKTC) law [6, 7]. With the control law, system can perfectly track the reference input. 4. PZT Location Optimization Considering the complexity of traditional optimization algorithm, and maximum amplitude are applied to optimize locations of PZT whose optimization process is simple. Firstly beam elements of space structure are divided into three categories: underside beam elements N u = {,,...,7,8}, front and rear beam elements N fr = {9,,...,33,34,36,37,...,46,47,,,...,6,6}, and connection beam elements between front and rear N c = {3, 48, 49,, 63}. Throughbeams,thesensitive beams are obtained. With ith natural frequency, the jth beam s [8] can be described as E ij = φt i K jφ i ωi, (4) where φ i is modal shape vector with ith natural frequency which is the ith column of V norm. V norm = V( V T MV) is normalized modal matrix, where V is modal matrix. K j is jth beam stiffness matrix; ω i is ith vibration frequency. Figures 3 6 show the first four order. From the figures, sensitive beam element sets are obtained: underside sensitive beam element set N s = {, 4,, 9,, }, front and rear sensitive beam element set N b = {9,, 3,, 8, 34, 36, 37}, and connection sensitive beam element set N h = {3, 48, 49,, 63}. N s, N b,andn h are the subsets of N u, N fr,andn c,respectively. Additionally, it is needed to select the most sensitive beam element from N s, N b,andn h according to maximum
5 Shock and Vibration Table 3: z-direction maximum amplitude of beams in N s. 4 9 Maximum amplitude (mm) Figure 3: First-order Figure : Third-order Figure 4: Second-order. Figure 6: Fourth-order. amplitude. Excitation node is selected as node and excitation direction is z. Excitationforcef e = sin(πft), and excitation frequency f is selected as the first natural frequency.3 Hz. Through analysing vibration response curves of N s, it is concluded that z-direction vibration amplitude is much larger than x and y which is considered. Similarly, analysing vibration response curves of N b and N h,it is shown that y-direction vibration amplitude is much larger than x and y. Thus, it is only needed to compare z-direction of the maximum amplitude for beams in N b and N h. From Table 3 which shows the z-direction maximum vibration amplitude of N s, th or th beam element is the most sensitive beam element. In addition, compared with the other location on the th or th beam element, location approaching node has larger vibration amplitude which is appropriate location for pasting PZT. Similarly, Table 4 indicates that 9th or 37th beam element is the most sensitive beam element in N b while the 9th beam element is selected. Furthermore, considering that x-directionvibration amplitude nearing node 9 is larger than the other position on 9th beam element while y-direction vibration amplitude on any location of 9th beam element is nearly the same, so position approaching node 9 on 9th beam element is another appropriate location for pasting PZT. Lastly, 3th
6 6 Shock and Vibration Table 4: y-direction maximum amplitude of beams in N b Amplitude (mm) Table : y-direction maximum amplitude of beams in N h Maximum amplitude (mm) Table 6: Maximum amplitude on 3th beam element. s (m) x (mm) y (mm) z (mm) beam element is the most sensitive beam element in N h from Table. Since any location s y-direction vibration amplitude of 3th beam element has nearly the same value, z-direction vibration amplitude is considered. Define variable s as the distancebetweenanylocationon3thbeamelementandnode 9. Table 6 shows that the middle location with the maximum vibration amplitude is another appropriate location to paste PZT. In a word, three optimization positions are middle position on 3th beam element (st controller CMKTC), location approachingnode9on9thbeamelement(ndcontroller CMKTC), and location approaching node on th beam element (3rd controller CMKTC3).. Numerical Simulation.. Characteristic Model Verification Simulation. To verify that characteristic model can accurately describe dynamic characters of system, with the literature [6], four forms of control input are selected as follows: (a) Step signal F i (k) =. (b) Smooth step signal F i (k) =.97u(k ) +.3. (c) Hz sinusoidal signal F i (k) = sin(kπδt). (d) Hz square wave signal F i (k) = sign(sin(kπδt)). Four different control input signals are shown in Figure 7. Control input direction is z-direction of node ; vibration displacement output direction is selected as y-direction of node 9. Output estimation error e(k) can be expressed as e(k) = x i (k) Φ T (k ) θ(k). Sampling time Δt is selected as. s. Figures 8 show the output estimation error with different control input. When control input is step signal or smooth step signal, output estimation error s magnitude is 7. If control input is sinusoidal signal or square wave signal, output estimation error s magnitude is. Therefore, F i (k) ê(k) (a) (b) (c) (d) Figure 7: Four-control input signal Figure 8: Output estimation error with (a). output of characteristic model can approach the output of space structure. In addition, characteristic model can accurately describe space structure s dynamic characters... Distributed PZT Vibration Simulation. Table 7 shows the related parameters of PZT and Al. With characters of characteristic parameters (9), select the initial value of
7 Shock and Vibration 7 Table 7: Related parameters of PZT and aluminum. Thickness (mm) Width (mm) Elastic modulus (Gpa) PSC (C/N) PZT 8 Al 7 Remark : PSC: Piezoelectric Strain Constant. Table 8: Control parameter. Parameter CMKTC CMKTC CMKTC3 λ ê(k). ê(k) Figure : Output estimation error with (d). ê(k) Figure 9: Output estimation error with (b) Figure : Output estimation error with (c). characteristic parameters as θ T () = [ ]. Related parameters of gradient method are λ =.8, λ =.4. Sampling time Δt is selected as. s. Control parameters are shown in Table 8. Excitation force f e = sin(πft); excitationfrequencyf is selected as the first natural frequency.3 Hz. Select nodes 9,, and as observationnodes.itshouldbeemphasizedthattheoutput feedback of CMKTC is y-direction displacement. x (mm) y (mm) z (mm) Node Without control CMKTC Figure : Displacement of node 9. Figures 4 are the vibration displacement curves of nodes9,,and,respectively.itisshownthaty-direction vibration displacement is much larger than x or y and suppressing vibration effect of y-direction is obvious. With CMKTC, y-direction vibration displacement of nodes 9,, andattenuatesto4 3, 4. 4,and.8 4, respectively, which indicates the effectiveness of distributed PZT vibration control. Control input is presented in Figure which shows that control voltage is within voltage range of PZT.
8 8 Shock and Vibration Table 9: y-direction vibration attenuation ratio of nodes 9,, and with different amplitude sinusoidal disturbance. Disturbance amplitude Node 9 (%) Node (%) Node (%) Table : y-direction vibration attenuation ratio of nodes 9,, and with different power-band white noise. Noise power Node 9 (%) Node (%) Node (%) y (mm) y (mm) x (mm) z (mm) x (mm) z (mm) Without control CMKTC Node Figure 3: Displacement of node. Without control CMKTC Node Figure 4: Displacement of node. u (V) u (V) u 3 (V) Figure : Control input. To verify the robustness of CMKTC, the matched disturbance is added. When the sinusoidal matched disturbance f e =Asin(t) with different amplitude is added, Table 9 shows y-direction vibration attenuation ratio of nodes 9,, and. From the table, it is known that node is more sensitive than node 9 and node. No matter how, sinusoidal disturbance has small effect on y-direction vibration displacement. Considering that there exists noise in actual system, so band-white noise with different noise power is added. ydirection vibration attenuation ratio of nodes 9,, and is presented in Table. The table indicates that vibration damping ratio decreases with the increase of noise power. Of course, band-white noise has small effect on system performance and CMKTC is with strong robustness. 6. Conclusion In this paper, a novel distributed PZT control strategy basedoncharacteristicmodelhasbeenproposed.toavoid thedifficultyinobtainingthemechanicalmodelofspace structure, an efficient model-free modeling approach, that is, the so-called characteristic model theory, is adopted.
9 Shock and Vibration 9 Then a PZT position optimization method based on and maximum vibration amplitude has been presented, in which the placement optimization of sensors and actuators is realized. Due to the established characteristic model, a simple but efficient CMKTC is designed. The power of the proposed control strategy is demonstrated on several numerical examples. Conflict of Interests The authors declare that there is no conflict of interests regarding the publication of this paper. Acknowledgment This work was supported by the National Natural Science Foundation of China (no ). References [] G. L. de Abreu, G. P. de Melo, V. Lopes, and M. J. Brennan, Active modal damping control of a smart truss structure using a self-organizing fuzzy controller, Journal of the Brazilian Society of Mechanical Sciences and Engineering,vol.37,no.,pp. 44 4,. [] G. Zhao, J. Wang, and Y. Gu, Optimal placement of piezoelectric active bars in vibration control by topological optimization, Acta Mechanica Sinica, vol. 4, no. 6, pp , 8. [3] B. Jaishi and W.-X. Ren, Structural finite element model updating using ambient vibration test results, JournalofStructural Engineering,vol.3,no.4,pp.67 68,. [4] B. Xu and J. S. Jiang, Integrated optimization of structure and control for piezoelectric intelligent trusses with uncertain placement of actuators and sensors, Computational Mechanics, vol.33,no.,pp.46 4,4. [] J.-S. Hwang, A. Kareem, and W.-J. Kim, Estimation of modal loads using structural response, Journal of Sound and Vibration, vol. 36, no. 3-, pp. 39, 9. [6] B. Hazra, A. Sadhu, A. J. Roffel, and S. Narasimhan, Hybrid time-frequency blind source separation towards ambient system identification of structures, Computer-Aided Civil and Infrastructure Engineering,vol.7,no.,pp.34 33,. [7] M. P. Schoen, R. C. Hoover, S. Chinvorarat, and G. M. Schoen, System identification and robust controller design using genetic algorithms for flexible space structures, Journal of Dynamic Systems, Measurement and Control, vol.3,no.3, pp., 9. [8] S.H.Chen,Z.J.Cao,andZ.S.Liu, Amethodofforthesection of sensors and actuators location, Acta Mechanica Sinica, vol. 4, no. 4, pp , 998. [9] W. P. Li and H. Huang, Integrated optimization of actuator placement and vibration control for piezoelectric adaptive trusses, Journal of Sound and Vibration,vol.33,no.,pp.7 3, 3. [] Y.Luo,M.Xu,B.Yan,andX.Zhang, PDcontrolforvibration attenuation in Hoop truss structure based on a novel piezoelectric bending actuator, Journal of Sound and Vibration,vol.339, pp. 4,. [] G. Abreu, M. Brennan, and J. Lopes, Robust control of an intelligent truss structure, in Proceedings of the th International Conference on Recent Advances in Structural Dynamics, Southampton, UK, July. []J.Y.Yang,Z.Q.Liu,X.Cuietal., Experimentalstudyof adaptive fuzzy sliding mode control for vibration of a flexible rectangular plate, Aeronautical and Space Sciences,vol.6,no.,pp.8 4,. [3] J. Lin and Y. B. Zheng, Vibration suppression control of smart piezoelectric rotating truss structure by parallel neuro-fuzzy control with genetic algorithm tuning, Journal of Sound and Vibration,vol.33,no.6,pp ,. [4] S. N. Mahmoodi and M. Ahmadian, Active vibration control with modified positive position feedback, Journal of Dynamic Systems, Measurement and Control,vol.3,no.4,8pages,9. [] J.WilhelmandR.Rajamani, Methodsformultimodalvibration suppression and energy harvesting using piezoelectric actuators, Journal of Vibration and Acoustics,vol.3,no.,pp , 9. [6]H.X.Wu,J.Hu,andY.C.Xie,Characteristic Model-Based Intelligent Adaptive Control, Science and Technology Press of China, Beijing, China, 9. [7] H. X. Wu, J. Hu, and Y. C. Xie, Characteristic model-based all-coefficient adaptive control method and its applications, IEEE Transactions on Systems, Man and Cybernetics Part C: Applications and Reviews,vol.37,no.,pp.3,7. [8] A. Preumont, On the damping of a piezoelectric truss, in Proceedings of the st International Congress of Theoretical and Applied Mechanics,pp.87 3,Warsaw,Poland,August.


















10 Rotating Machinery Engineering Journal of Volume 4 The Scientific World Journal Volume 4 Distributed Sensor Networks Journal of Sensors Volume 4 Volume 4 Volume 4 Journal of Control Science and Engineering Advances in Civil Engineering Volume 4 Volume 4 Submit your manuscripts at Journal of Journal of Electrical and Computer Engineering Robotics Volume 4 Volume 4 VLSI Design Advances in OptoElectronics Navigation and Observation Volume 4 Chemical Engineering Volume 4 Volume 4 Active and Passive Electronic Components Antennas and Propagation Aerospace Engineering Volume 4 Volume 4 Volume 4 Modelling & Simulation in Engineering Volume 4 Volume 4 Shock and Vibration Volume 4 Advances in Acoustics and Vibration Volume 4
Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators
 Shock and Vibration, Article ID 71814, 5 pages http://dx.doi.org/1.1155/214/71814 Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators Sajad
Shock and Vibration, Article ID 71814, 5 pages http://dx.doi.org/1.1155/214/71814 Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators Sajad
Research Article Travel-Time Difference Extracting in Experimental Study of Rayleigh Wave Acoustoelastic Effect
 ISRN Mechanical Engineering, Article ID 3492, 7 pages http://dx.doi.org/.55/24/3492 Research Article Travel-Time Difference Extracting in Experimental Study of Rayleigh Wave Acoustoelastic Effect Hu Eryi
ISRN Mechanical Engineering, Article ID 3492, 7 pages http://dx.doi.org/.55/24/3492 Research Article Travel-Time Difference Extracting in Experimental Study of Rayleigh Wave Acoustoelastic Effect Hu Eryi
Research Article A New Flexibility Based Damage Index for Damage Detection of Truss Structures
 Shock and Vibration Volume 214, Article ID 46692, 12 pages http://dx.doi.org/1.1155/214/46692 Research Article A New Flexibility Based Damage Index for Damage Detection of Truss Structures M. Montazer
Shock and Vibration Volume 214, Article ID 46692, 12 pages http://dx.doi.org/1.1155/214/46692 Research Article A New Flexibility Based Damage Index for Damage Detection of Truss Structures M. Montazer
Research Article Electromagnetic and Mechanical Characteristics Analysis of a Flat-Type Vertical-Gap Passive Magnetic Levitation Vibration Isolator
 Shock and Vibration Volume 6, Article ID 577, pages http://dx.doi.org/.55/6/577 Research Article Electromagnetic and Mechanical Characteristics Analysis of a Flat-Type Vertical-Gap Passive Magnetic Levitation
Shock and Vibration Volume 6, Article ID 577, pages http://dx.doi.org/.55/6/577 Research Article Electromagnetic and Mechanical Characteristics Analysis of a Flat-Type Vertical-Gap Passive Magnetic Levitation
Research Article The Microphone Feedback Analogy for Chatter in Machining
 Shock and Vibration Volume 215, Article ID 976819, 5 pages http://dx.doi.org/1.1155/215/976819 Research Article The Microphone Feedback Analogy for Chatter in Machining Tony Schmitz UniversityofNorthCarolinaatCharlotte,Charlotte,NC28223,USA
Shock and Vibration Volume 215, Article ID 976819, 5 pages http://dx.doi.org/1.1155/215/976819 Research Article The Microphone Feedback Analogy for Chatter in Machining Tony Schmitz UniversityofNorthCarolinaatCharlotte,Charlotte,NC28223,USA
Research Article Forward and Reverse Movements of a Linear Positioning Stage Based on the Parasitic Motion Principle
 Advances in Mechanical Engineering, Article ID 45256, 7 pages http://dx.doi.org/1.1155/214/45256 Research Article Forward and Reverse Movements of a Linear Positioning Stage Based on the Parasitic Motion
Advances in Mechanical Engineering, Article ID 45256, 7 pages http://dx.doi.org/1.1155/214/45256 Research Article Forward and Reverse Movements of a Linear Positioning Stage Based on the Parasitic Motion
Research Article Investigations of Dynamic Behaviors of Face Gear Drives Associated with Pinion Dedendum Fatigue Cracks
 Shock and Vibration Volume 26, Article ID 37386, pages http://dx.doi.org/.55/26/37386 Research Article Investigations of Dynamic Behaviors of Face Gear Drives Associated with Dedendum Fatigue Cracks Zhengminqing
Shock and Vibration Volume 26, Article ID 37386, pages http://dx.doi.org/.55/26/37386 Research Article Investigations of Dynamic Behaviors of Face Gear Drives Associated with Dedendum Fatigue Cracks Zhengminqing
A New Robust Decentralized Control Method for Interconnected Nonlinear Systems Based on State Extension and Adaptive Tracking
 7 3rd International Conference on Computational Systems and Communications (ICCSC 7) A New Robust Decentralized Control Method for Interconnected Nonlinear Systems Based on State Etension and Adaptive
7 3rd International Conference on Computational Systems and Communications (ICCSC 7) A New Robust Decentralized Control Method for Interconnected Nonlinear Systems Based on State Etension and Adaptive
Research Letter An Algorithm to Generate Representations of System Identification Errors
 Research Letters in Signal Processing Volume 008, Article ID 5991, 4 pages doi:10.1155/008/5991 Research Letter An Algorithm to Generate Representations of System Identification Errors Wancheng Zhang and
Research Letters in Signal Processing Volume 008, Article ID 5991, 4 pages doi:10.1155/008/5991 Research Letter An Algorithm to Generate Representations of System Identification Errors Wancheng Zhang and
Research Article Partial Pole Placement in LMI Region
 Control Science and Engineering Article ID 84128 5 pages http://dxdoiorg/11155/214/84128 Research Article Partial Pole Placement in LMI Region Liuli Ou 1 Shaobo Han 2 Yongji Wang 1 Shuai Dong 1 and Lei
Control Science and Engineering Article ID 84128 5 pages http://dxdoiorg/11155/214/84128 Research Article Partial Pole Placement in LMI Region Liuli Ou 1 Shaobo Han 2 Yongji Wang 1 Shuai Dong 1 and Lei
ANALYSIS AND EXPERIMENT OF DYNAMIC CHARACTERISTICS OF ELECTRONIC DEVICE CHASSIS
 ANALYSIS AND EXPERIMENT OF DYNAMIC CHARACTERISTICS OF ELECTRONIC DEVICE CHASSIS HE QING, DU DONGMEI, JIANG XUCHAO Key Laboratory of Condition Monitoring and Control for Power Plant Equipment, Ministry
ANALYSIS AND EXPERIMENT OF DYNAMIC CHARACTERISTICS OF ELECTRONIC DEVICE CHASSIS HE QING, DU DONGMEI, JIANG XUCHAO Key Laboratory of Condition Monitoring and Control for Power Plant Equipment, Ministry
Research Article Distributed Multiple Tuned Mass Dampers for Wind Vibration Response Control of High-Rise Building
 Journal of Engineering, Article ID 198719, 11 pages http://dxdoiorg/101155/2014/198719 Research Article Distributed Multiple Tuned Mass Dampers for Wind Vibration Response Control of High-Rise Building
Journal of Engineering, Article ID 198719, 11 pages http://dxdoiorg/101155/2014/198719 Research Article Distributed Multiple Tuned Mass Dampers for Wind Vibration Response Control of High-Rise Building
Research Article Influence of the Parameterization in the Interval Solution of Elastic Beams
 Structures Volume 04, Article ID 3953, 5 pages http://dx.doi.org/0.55/04/3953 Research Article Influence of the Parameterization in the Interval Solution of Elastic Beams Stefano Gabriele and Valerio Varano
Structures Volume 04, Article ID 3953, 5 pages http://dx.doi.org/0.55/04/3953 Research Article Influence of the Parameterization in the Interval Solution of Elastic Beams Stefano Gabriele and Valerio Varano
Research on the synchronous vibration of the non-integral. mechanism under the vibration environment
 International Journal of Research in Engineering and Science (IJRES) ISSN (Online): 3-9364 ISSN (Print): 3-9356 Volume 3 Issue ǁ December. 5 ǁ PP.-6 Research on the synchronous vibration of the non-integral
International Journal of Research in Engineering and Science (IJRES) ISSN (Online): 3-9364 ISSN (Print): 3-9356 Volume 3 Issue ǁ December. 5 ǁ PP.-6 Research on the synchronous vibration of the non-integral
The Wind-Induced Vibration Response for Tower Crane Based on Virtual Excitation Method
 Send Orders for Reprints to reprints@benthamscience.ae The Open Mechanical Engineering Journal, 2014, 8, 201-205 201 Open Access The Wind-Induced Vibration Response for Tower Crane Based on Virtual Excitation
Send Orders for Reprints to reprints@benthamscience.ae The Open Mechanical Engineering Journal, 2014, 8, 201-205 201 Open Access The Wind-Induced Vibration Response for Tower Crane Based on Virtual Excitation
Research Article Propagation Characteristics of Oblique Incident Terahertz Wave in Nonuniform Dusty Plasma
 Antennas and Propagation Volume 216, Article ID 945473, 6 pages http://dx.doi.org/1.1155/216/945473 Research Article Propagation Characteristics of Oblique Incident Terahert Wave in Nonuniform Dusty Plasma
Antennas and Propagation Volume 216, Article ID 945473, 6 pages http://dx.doi.org/1.1155/216/945473 Research Article Propagation Characteristics of Oblique Incident Terahert Wave in Nonuniform Dusty Plasma
Research Article Doppler Velocity Estimation of Overlapping Linear-Period-Modulated Ultrasonic Waves Based on an Expectation-Maximization Algorithm
 Advances in Acoustics and Vibration, Article ID 9876, 7 pages http://dx.doi.org/.55//9876 Research Article Doppler Velocity Estimation of Overlapping Linear-Period-Modulated Ultrasonic Waves Based on an
Advances in Acoustics and Vibration, Article ID 9876, 7 pages http://dx.doi.org/.55//9876 Research Article Doppler Velocity Estimation of Overlapping Linear-Period-Modulated Ultrasonic Waves Based on an
Research Article Study on Zero-Doppler Centroid Control for GEO SAR Ground Observation
 Antennas and Propagation Article ID 549269 7 pages http://dx.doi.org/1.1155/214/549269 Research Article Study on Zero-Doppler Centroid Control for GEO SAR Ground Observation Yicheng Jiang Bin Hu Yun Zhang
Antennas and Propagation Article ID 549269 7 pages http://dx.doi.org/1.1155/214/549269 Research Article Study on Zero-Doppler Centroid Control for GEO SAR Ground Observation Yicheng Jiang Bin Hu Yun Zhang
Identification of damage in a beam structure by using mode shape curvature squares
 Shock and Vibration 17 (2010) 601 610 601 DOI 10.3233/SAV-2010-0551 IOS Press Identification of damage in a beam structure by using mode shape curvature squares S. Rucevskis and M. Wesolowski Institute
Shock and Vibration 17 (2010) 601 610 601 DOI 10.3233/SAV-2010-0551 IOS Press Identification of damage in a beam structure by using mode shape curvature squares S. Rucevskis and M. Wesolowski Institute
Research Article The Application of Baum-Welch Algorithm in Multistep Attack
 e Scientific World Journal, Article ID 374260, 7 pages http://dx.doi.org/10.1155/2014/374260 Research Article The Application of Baum-Welch Algorithm in Multistep Attack Yanxue Zhang, 1 Dongmei Zhao, 2
e Scientific World Journal, Article ID 374260, 7 pages http://dx.doi.org/10.1155/2014/374260 Research Article The Application of Baum-Welch Algorithm in Multistep Attack Yanxue Zhang, 1 Dongmei Zhao, 2
Research Article A New Type of Magnetic Actuator Capable of Wall-Climbing Movement Using Inertia Force
 Engineering Volume 14, Article ID 93178, 6 pages http://dx.doi.org/1.1155/14/93178 Research Article A New Type of Magnetic Actuator Capable of Wall-Climbing Movement Using Inertia Force H. Yaguchi, S.
Engineering Volume 14, Article ID 93178, 6 pages http://dx.doi.org/1.1155/14/93178 Research Article A New Type of Magnetic Actuator Capable of Wall-Climbing Movement Using Inertia Force H. Yaguchi, S.
Research Article A Mathematical Images Group Model to Estimate the Sound Level in a Close-Fitting Enclosure
 Advances in Acoustics and Vibration, Article ID 284362, 7 pages http://dx.doi.org/10.1155/2014/284362 Research Article A Mathematical Images Group Model to Estimate the Sound Level in a Close-Fitting Enclosure
Advances in Acoustics and Vibration, Article ID 284362, 7 pages http://dx.doi.org/10.1155/2014/284362 Research Article A Mathematical Images Group Model to Estimate the Sound Level in a Close-Fitting Enclosure
VIBRATION CONTROL OF RECTANGULAR CROSS-PLY FRP PLATES USING PZT MATERIALS
 Journal of Engineering Science and Technology Vol. 12, No. 12 (217) 3398-3411 School of Engineering, Taylor s University VIBRATION CONTROL OF RECTANGULAR CROSS-PLY FRP PLATES USING PZT MATERIALS DILEEP
Journal of Engineering Science and Technology Vol. 12, No. 12 (217) 3398-3411 School of Engineering, Taylor s University VIBRATION CONTROL OF RECTANGULAR CROSS-PLY FRP PLATES USING PZT MATERIALS DILEEP
Analysis of Local Vibration for High-Speed Railway Bridge Based on Finite Element Method
 Send Orders for Reprints to reprints@benthamscience.ae 91 The Open Mechanical Engineering Journal, 214, 8, 91-915 Open Access Analysis of Local Vibration for High-Speed Railway Bridge Based on Finite Element
Send Orders for Reprints to reprints@benthamscience.ae 91 The Open Mechanical Engineering Journal, 214, 8, 91-915 Open Access Analysis of Local Vibration for High-Speed Railway Bridge Based on Finite Element
Research Article On the Security of a Novel Probabilistic Signature Based on Bilinear Square Diffie-Hellman Problem and Its Extension
 e Scientific World Journal, Article ID 345686, 4 pages http://dx.doi.org/10.1155/2014/345686 Research Article On the Security of a Novel Probabilistic Signature Based on Bilinear Square Diffie-Hellman
e Scientific World Journal, Article ID 345686, 4 pages http://dx.doi.org/10.1155/2014/345686 Research Article On the Security of a Novel Probabilistic Signature Based on Bilinear Square Diffie-Hellman
1330. Comparative study of model updating methods using frequency response function data
 1330. Comparative study of model updating methods using frequency response function data Dong Jiang 1, Peng Zhang 2, Qingguo Fei 3, Shaoqing Wu 4 Jiangsu Key Laboratory of Engineering Mechanics, Nanjing,
1330. Comparative study of model updating methods using frequency response function data Dong Jiang 1, Peng Zhang 2, Qingguo Fei 3, Shaoqing Wu 4 Jiangsu Key Laboratory of Engineering Mechanics, Nanjing,
Engine fault feature extraction based on order tracking and VMD in transient conditions
 Engine fault feature extraction based on order tracking and VMD in transient conditions Gang Ren 1, Jide Jia 2, Jian Mei 3, Xiangyu Jia 4, Jiajia Han 5 1, 4, 5 Fifth Cadet Brigade, Army Transportation
Engine fault feature extraction based on order tracking and VMD in transient conditions Gang Ren 1, Jide Jia 2, Jian Mei 3, Xiangyu Jia 4, Jiajia Han 5 1, 4, 5 Fifth Cadet Brigade, Army Transportation
Research Article Simplified Robotics Joint-Space Trajectory Generation with a via Point Using a Single Polynomial
 Robotics Volume, Article ID 75958, 6 pages http://dx.doi.org/.55//75958 Research Article Simplified Robotics Joint-Space Trajectory Generation with a via Point Using a Single Polynomial Robert L. Williams
Robotics Volume, Article ID 75958, 6 pages http://dx.doi.org/.55//75958 Research Article Simplified Robotics Joint-Space Trajectory Generation with a via Point Using a Single Polynomial Robert L. Williams
Research Article Characterization and Modelling of LeBlanc Hydrodynamic Stabilizer: A Novel Approach for Steady and Transient State Models
 Modelling and Simulation in Engineering Volume 215, Article ID 729582, 11 pages http://dx.doi.org/1.1155/215/729582 Research Article Characterization and Modelling of LeBlanc Hydrodynamic Stabilizer: A
Modelling and Simulation in Engineering Volume 215, Article ID 729582, 11 pages http://dx.doi.org/1.1155/215/729582 Research Article Characterization and Modelling of LeBlanc Hydrodynamic Stabilizer: A
System Parameter Identification for Uncertain Two Degree of Freedom Vibration System
 System Parameter Identification for Uncertain Two Degree of Freedom Vibration System Hojong Lee and Yong Suk Kang Department of Mechanical Engineering, Virginia Tech 318 Randolph Hall, Blacksburg, VA,
System Parameter Identification for Uncertain Two Degree of Freedom Vibration System Hojong Lee and Yong Suk Kang Department of Mechanical Engineering, Virginia Tech 318 Randolph Hall, Blacksburg, VA,
Chapter 23: Principles of Passive Vibration Control: Design of absorber
 Chapter 23: Principles of Passive Vibration Control: Design of absorber INTRODUCTION The term 'vibration absorber' is used for passive devices attached to the vibrating structure. Such devices are made
Chapter 23: Principles of Passive Vibration Control: Design of absorber INTRODUCTION The term 'vibration absorber' is used for passive devices attached to the vibrating structure. Such devices are made
DYNAMICS AND CONTROL OF PIEZOELECTRIC- BASED STEWART PLATFORM FOR VIBRATION ISOLA- TION
 DYNAMICS AND CONTROL OF PIEZOELECTRIC- BASED STEWART PLATFORM FOR VIBRATION ISOLA- TION Jinjun Shan, Xiaobu Xue, Ziliang Kang Department of Earth and Space Science and Engineering, York University 47 Keele
DYNAMICS AND CONTROL OF PIEZOELECTRIC- BASED STEWART PLATFORM FOR VIBRATION ISOLA- TION Jinjun Shan, Xiaobu Xue, Ziliang Kang Department of Earth and Space Science and Engineering, York University 47 Keele
1038. Adaptive input estimation method and fuzzy robust controller combined for active cantilever beam structural system vibration control
 1038. Adaptive input estimation method and fuzzy robust controller combined for active cantilever beam structural system vibration control Ming-Hui Lee Ming-Hui Lee Department of Civil Engineering, Chinese
1038. Adaptive input estimation method and fuzzy robust controller combined for active cantilever beam structural system vibration control Ming-Hui Lee Ming-Hui Lee Department of Civil Engineering, Chinese
Research Article Convex Polyhedron Method to Stability of Continuous Systems with Two Additive Time-Varying Delay Components
 Applied Mathematics Volume 202, Article ID 689820, 3 pages doi:0.55/202/689820 Research Article Convex Polyhedron Method to Stability of Continuous Systems with Two Additive Time-Varying Delay Components
Applied Mathematics Volume 202, Article ID 689820, 3 pages doi:0.55/202/689820 Research Article Convex Polyhedron Method to Stability of Continuous Systems with Two Additive Time-Varying Delay Components
A METHOD OF ADAPTATION BETWEEN STEEPEST- DESCENT AND NEWTON S ALGORITHM FOR MULTI- CHANNEL ACTIVE CONTROL OF TONAL NOISE AND VIBRATION
 A METHOD OF ADAPTATION BETWEEN STEEPEST- DESCENT AND NEWTON S ALGORITHM FOR MULTI- CHANNEL ACTIVE CONTROL OF TONAL NOISE AND VIBRATION Jordan Cheer and Stephen Daley Institute of Sound and Vibration Research,
A METHOD OF ADAPTATION BETWEEN STEEPEST- DESCENT AND NEWTON S ALGORITHM FOR MULTI- CHANNEL ACTIVE CONTROL OF TONAL NOISE AND VIBRATION Jordan Cheer and Stephen Daley Institute of Sound and Vibration Research,
Displacement Feedback for Active Vibration Control of Smart Cantilever Beam
 Displacement Feedback for Active Vibration Control of Smart Cantilever Beam Riessom W. Prasad Krishna K.V. Gangadharan Research Scholar Professor Professor Department of Mechanical Engineering National
Displacement Feedback for Active Vibration Control of Smart Cantilever Beam Riessom W. Prasad Krishna K.V. Gangadharan Research Scholar Professor Professor Department of Mechanical Engineering National
Structural Health Monitoring using Shaped Sensors
 Structural Health Monitoring using Shaped Sensors Michael I. Friswell and Sondipon Adhikari Swansea University, UK This paper is concerned with distributed sensors to measure the response of beam and plate
Structural Health Monitoring using Shaped Sensors Michael I. Friswell and Sondipon Adhikari Swansea University, UK This paper is concerned with distributed sensors to measure the response of beam and plate
PSD Analysis and Optimization of 2500hp Shale Gas Fracturing Truck Chassis Frame
 Send Orders for Reprints to reprints@benthamscience.ae The Open Mechanical Engineering Journal, 2014, 8, 533-538 533 Open Access PSD Analysis and Optimization of 2500hp Shale Gas Fracturing Truck Chassis
Send Orders for Reprints to reprints@benthamscience.ae The Open Mechanical Engineering Journal, 2014, 8, 533-538 533 Open Access PSD Analysis and Optimization of 2500hp Shale Gas Fracturing Truck Chassis
DISTURBANCE ATTENUATION IN A MAGNETIC LEVITATION SYSTEM WITH ACCELERATION FEEDBACK
 DISTURBANCE ATTENUATION IN A MAGNETIC LEVITATION SYSTEM WITH ACCELERATION FEEDBACK Feng Tian Department of Mechanical Engineering Marquette University Milwaukee, WI 53233 USA Email: feng.tian@mu.edu Kevin
DISTURBANCE ATTENUATION IN A MAGNETIC LEVITATION SYSTEM WITH ACCELERATION FEEDBACK Feng Tian Department of Mechanical Engineering Marquette University Milwaukee, WI 53233 USA Email: feng.tian@mu.edu Kevin
Research Article Weather Forecasting Using Sliding Window Algorithm
 ISRN Signal Processing Volume 23, Article ID 5654, 5 pages http://dx.doi.org/.55/23/5654 Research Article Weather Forecasting Using Sliding Window Algorithm Piyush Kapoor and Sarabjeet Singh Bedi 2 KvantumInc.,Gurgaon22,India
ISRN Signal Processing Volume 23, Article ID 5654, 5 pages http://dx.doi.org/.55/23/5654 Research Article Weather Forecasting Using Sliding Window Algorithm Piyush Kapoor and Sarabjeet Singh Bedi 2 KvantumInc.,Gurgaon22,India
Research Article Band Structure Engineering in 2D Photonic Crystal Waveguide with Rhombic Cross-Section Elements
 Advances in Optical Technologies Volume 214, Article ID 78142, 5 pages http://dx.doi.org/1155/214/78142 Research Article Band Structure Engineering in 2D Photonic Crystal Waveguide with Rhombic Cross-Section
Advances in Optical Technologies Volume 214, Article ID 78142, 5 pages http://dx.doi.org/1155/214/78142 Research Article Band Structure Engineering in 2D Photonic Crystal Waveguide with Rhombic Cross-Section
Research Article Numerical Study of Flutter of a Two-Dimensional Aeroelastic System
 ISRN Mechanical Volume 213, Article ID 127123, 4 pages http://dx.doi.org/1.1155/213/127123 Research Article Numerical Study of Flutter of a Two-Dimensional Aeroelastic System Riccy Kurniawan Department
ISRN Mechanical Volume 213, Article ID 127123, 4 pages http://dx.doi.org/1.1155/213/127123 Research Article Numerical Study of Flutter of a Two-Dimensional Aeroelastic System Riccy Kurniawan Department
Research Article A PLS-Based Weighted Artificial Neural Network Approach for Alpha Radioactivity Prediction inside Contaminated Pipes
 Mathematical Problems in Engineering, Article ID 517605, 5 pages http://dxdoiorg/101155/2014/517605 Research Article A PLS-Based Weighted Artificial Neural Network Approach for Alpha Radioactivity Prediction
Mathematical Problems in Engineering, Article ID 517605, 5 pages http://dxdoiorg/101155/2014/517605 Research Article A PLS-Based Weighted Artificial Neural Network Approach for Alpha Radioactivity Prediction
Open Access Permanent Magnet Synchronous Motor Vector Control Based on Weighted Integral Gain of Sliding Mode Variable Structure
 Send Orders for Reprints to reprints@benthamscienceae The Open Automation and Control Systems Journal, 5, 7, 33-33 33 Open Access Permanent Magnet Synchronous Motor Vector Control Based on Weighted Integral
Send Orders for Reprints to reprints@benthamscienceae The Open Automation and Control Systems Journal, 5, 7, 33-33 33 Open Access Permanent Magnet Synchronous Motor Vector Control Based on Weighted Integral
Active control for a flexible beam with nonlinear hysteresis and time delay
 THEORETICAL & APPLIED MECHANICS LETTERS 3, 635 (23) Active control for a flexible beam with nonlinear hysteresis and time delay Kun Liu, Longxiang Chen,, 2, a) and Guoping Cai ) Department of Engineering
THEORETICAL & APPLIED MECHANICS LETTERS 3, 635 (23) Active control for a flexible beam with nonlinear hysteresis and time delay Kun Liu, Longxiang Chen,, 2, a) and Guoping Cai ) Department of Engineering
Research Article H Consensus for Discrete-Time Multiagent Systems
 Discrete Dynamics in Nature and Society Volume 05, Article ID 8084, 6 pages http://dx.doi.org/0.55/05/8084 Research Article H Consensus for Discrete- Multiagent Systems Xiaoping Wang and Jinliang Shao
Discrete Dynamics in Nature and Society Volume 05, Article ID 8084, 6 pages http://dx.doi.org/0.55/05/8084 Research Article H Consensus for Discrete- Multiagent Systems Xiaoping Wang and Jinliang Shao
Research Article Trapped-Mode Resonance Regime of Thin Microwave Electromagnetic Arrays with Two Concentric Rings in Unit Cell
 Microwave Science and Technology Volume 2, Article ID 3688, 6 pages doi:.55/2/3688 Research Article Trapped-Mode Resonance Regime of Thin Microwave Electromagnetic Arrays with Two Concentric Rings in Unit
Microwave Science and Technology Volume 2, Article ID 3688, 6 pages doi:.55/2/3688 Research Article Trapped-Mode Resonance Regime of Thin Microwave Electromagnetic Arrays with Two Concentric Rings in Unit
A Sliding Mode Control based on Nonlinear Disturbance Observer for the Mobile Manipulator
 International Core Journal of Engineering Vol.3 No.6 7 ISSN: 44-895 A Sliding Mode Control based on Nonlinear Disturbance Observer for the Mobile Manipulator Yanna Si Information Engineering College Henan
International Core Journal of Engineering Vol.3 No.6 7 ISSN: 44-895 A Sliding Mode Control based on Nonlinear Disturbance Observer for the Mobile Manipulator Yanna Si Information Engineering College Henan
Research Article An Analytical Model for Rotation Stiffness and Deformation of an Antiloosening Nut under Locking Force
 Rotating Machinery, Article ID 410813, 8 pages http://dx.doi.org/10.1155/2014/410813 Research Article An Model for Rotation Stiffness and Deformation of an Antiloosening Nut under Locking Force X. J. Jiang,
Rotating Machinery, Article ID 410813, 8 pages http://dx.doi.org/10.1155/2014/410813 Research Article An Model for Rotation Stiffness and Deformation of an Antiloosening Nut under Locking Force X. J. Jiang,
Chaos suppression of uncertain gyros in a given finite time
 Chin. Phys. B Vol. 1, No. 11 1 1155 Chaos suppression of uncertain gyros in a given finite time Mohammad Pourmahmood Aghababa a and Hasan Pourmahmood Aghababa bc a Electrical Engineering Department, Urmia
Chin. Phys. B Vol. 1, No. 11 1 1155 Chaos suppression of uncertain gyros in a given finite time Mohammad Pourmahmood Aghababa a and Hasan Pourmahmood Aghababa bc a Electrical Engineering Department, Urmia
Structural Damage Detection Using Time Windowing Technique from Measured Acceleration during Earthquake
 Structural Damage Detection Using Time Windowing Technique from Measured Acceleration during Earthquake Seung Keun Park and Hae Sung Lee ABSTRACT This paper presents a system identification (SI) scheme
Structural Damage Detection Using Time Windowing Technique from Measured Acceleration during Earthquake Seung Keun Park and Hae Sung Lee ABSTRACT This paper presents a system identification (SI) scheme
Research Article Stabilization Analysis and Synthesis of Discrete-Time Descriptor Markov Jump Systems with Partially Unknown Transition Probabilities
 Research Journal of Applied Sciences, Engineering and Technology 7(4): 728-734, 214 DOI:1.1926/rjaset.7.39 ISSN: 24-7459; e-issn: 24-7467 214 Maxwell Scientific Publication Corp. Submitted: February 25,
Research Journal of Applied Sciences, Engineering and Technology 7(4): 728-734, 214 DOI:1.1926/rjaset.7.39 ISSN: 24-7459; e-issn: 24-7467 214 Maxwell Scientific Publication Corp. Submitted: February 25,
Active control of time-delay in cutting vibration
 THEORETICAL & APPLIED MECHANICS LETTERS 3, 633 (213) Active control of time-delay in cutting vibration Pingxu Zheng a) and Xinhua Long b) State Key Laboratory of Mechanical System and Vibration, Shanghai
THEORETICAL & APPLIED MECHANICS LETTERS 3, 633 (213) Active control of time-delay in cutting vibration Pingxu Zheng a) and Xinhua Long b) State Key Laboratory of Mechanical System and Vibration, Shanghai
Research Article Robust Switching Control Strategy for a Transmission System with Unknown Backlash
 Mathematical Problems in Engineering Volume 24, Article ID 79384, 8 pages http://dx.doi.org/.55/24/79384 Research Article Robust Switching Control Strategy for a Transmission System with Unknown Backlash
Mathematical Problems in Engineering Volume 24, Article ID 79384, 8 pages http://dx.doi.org/.55/24/79384 Research Article Robust Switching Control Strategy for a Transmission System with Unknown Backlash
Experimental study of delayed positive feedback control for a flexible beam
 THEORETICAL & APPLIED MECHANICS LETTERS 1, 063003 (2011) Experimental study of delayed positive feedback control for a flexible beam Kun Liu, Longxiang Chen, and Guoping Cai a) Department of Engineering
THEORETICAL & APPLIED MECHANICS LETTERS 1, 063003 (2011) Experimental study of delayed positive feedback control for a flexible beam Kun Liu, Longxiang Chen, and Guoping Cai a) Department of Engineering
Research Article Semi-Active Pulse-Switching Vibration Suppression Using Sliding Time Window
 Smart Materials Research Volume 213, Article ID 865981, 7 pages http://dx.doi.org/1.1155/213/865981 Research Article Semi-Active Pulse-Switching Vibration Suppression Using Sliding Time Window S. Mohammadi,
Smart Materials Research Volume 213, Article ID 865981, 7 pages http://dx.doi.org/1.1155/213/865981 Research Article Semi-Active Pulse-Switching Vibration Suppression Using Sliding Time Window S. Mohammadi,
Research Article Emissivity Measurement of Semitransparent Textiles
 Advances in Optical Technologies Volume 2012, Article ID 373926, 5 pages doi:10.1155/2012/373926 Research Article Emissivity Measurement of Semitransparent Textiles P. Bison, A. Bortolin, G. Cadelano,
Advances in Optical Technologies Volume 2012, Article ID 373926, 5 pages doi:10.1155/2012/373926 Research Article Emissivity Measurement of Semitransparent Textiles P. Bison, A. Bortolin, G. Cadelano,
The Analysis of Aluminium Cantilever Beam with Piezoelectric Material by changing Position of piezo patch over Length of Beam
 The Analysis of Aluminium Cantilever Beam with Piezoelectric Material by changing Position of piezo patch over Length of Beam Mr. Lalit R. Shendre 1, Prof. Bhamare V.G. 2 1PG Student, Department of Mechanical
The Analysis of Aluminium Cantilever Beam with Piezoelectric Material by changing Position of piezo patch over Length of Beam Mr. Lalit R. Shendre 1, Prof. Bhamare V.G. 2 1PG Student, Department of Mechanical
SENSOR DESIGN FOR PIEZOELECTRIC CANTILEVER BEAM ENERGY HARVESTERS
 SENSOR DESIGN FOR PIEZOELECTRIC CANTILEVER BEAM ENERGY HARVESTERS Michael I. Friswell and Sondipon Adhikari School of Engineering Swansea University Singleton Park, Swansea SA2 8PP, UK E-mail: m.i.friswell@swansea.ac.uk;
SENSOR DESIGN FOR PIEZOELECTRIC CANTILEVER BEAM ENERGY HARVESTERS Michael I. Friswell and Sondipon Adhikari School of Engineering Swansea University Singleton Park, Swansea SA2 8PP, UK E-mail: m.i.friswell@swansea.ac.uk;
Finite Element Analysis of Piezoelectric Cantilever
 Finite Element Analysis of Piezoelectric Cantilever Nitin N More Department of Mechanical Engineering K.L.E S College of Engineering and Technology, Belgaum, Karnataka, India. Abstract- Energy (or power)
Finite Element Analysis of Piezoelectric Cantilever Nitin N More Department of Mechanical Engineering K.L.E S College of Engineering and Technology, Belgaum, Karnataka, India. Abstract- Energy (or power)
EXPERIMENTAL AND THEORETICAL SYSTEM IDENTIFICATION OF FLEXIBLE STRUCTURES WITH PIEZOELECTRIC ACTUATORS
 24 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES EXPERIMENTAL AND THEORETICAL SYSTEM IDENTIFICATION OF FLEXIBLE STRUCTURES WITH PIEZOELECTRIC ACTUATORS Aghil Yousefi-Koma*, David Zimcik* and Andrei
24 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES EXPERIMENTAL AND THEORETICAL SYSTEM IDENTIFICATION OF FLEXIBLE STRUCTURES WITH PIEZOELECTRIC ACTUATORS Aghil Yousefi-Koma*, David Zimcik* and Andrei
Deflections and Strains in Cracked Shafts due to Rotating Loads: A Numerical and Experimental Analysis
 Rotating Machinery, 10(4): 283 291, 2004 Copyright c Taylor & Francis Inc. ISSN: 1023-621X print / 1542-3034 online DOI: 10.1080/10236210490447728 Deflections and Strains in Cracked Shafts due to Rotating
Rotating Machinery, 10(4): 283 291, 2004 Copyright c Taylor & Francis Inc. ISSN: 1023-621X print / 1542-3034 online DOI: 10.1080/10236210490447728 Deflections and Strains in Cracked Shafts due to Rotating
Damage Detection of a Continuous Bridge from Response of a Moving Vehicle. Citation Shock and Vibration, 2014, v. 2014, article no.
 Title Damage Detection of a Continuous Bridge from Response of a Moving Vehicle Author(s) LI, Z; Au, FTK Citation Shock and Vibration,, v., article no. 68 Issued Date URL http://hdl.handle.net/7/7 Rights
Title Damage Detection of a Continuous Bridge from Response of a Moving Vehicle Author(s) LI, Z; Au, FTK Citation Shock and Vibration,, v., article no. 68 Issued Date URL http://hdl.handle.net/7/7 Rights
Modeling of Hysteresis Effect of SMA using Neuro Fuzzy Inference System
 54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference April 8-11, 2013, Boston, Massachusetts AIAA 2013-1918 Modeling of Hysteresis Effect of SMA using Neuro Fuzzy Inference
54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference April 8-11, 2013, Boston, Massachusetts AIAA 2013-1918 Modeling of Hysteresis Effect of SMA using Neuro Fuzzy Inference
Nonlinear Controller Design of the Inverted Pendulum System based on Extended State Observer Limin Du, Fucheng Cao
 International Conference on Automation, Mechanical Control and Computational Engineering (AMCCE 015) Nonlinear Controller Design of the Inverted Pendulum System based on Extended State Observer Limin Du,
International Conference on Automation, Mechanical Control and Computational Engineering (AMCCE 015) Nonlinear Controller Design of the Inverted Pendulum System based on Extended State Observer Limin Du,
Research Article Calculation for Primary Combustion Characteristics of Boron-Based Fuel-Rich Propellant Based on BP Neural Network
 Combustion Volume 2012, Article ID 635190, 6 pages doi:10.1155/2012/635190 Research Article Calculation for Primary Combustion Characteristics of Boron-Based Fuel-Rich Propellant Based on BP Neural Network
Combustion Volume 2012, Article ID 635190, 6 pages doi:10.1155/2012/635190 Research Article Calculation for Primary Combustion Characteristics of Boron-Based Fuel-Rich Propellant Based on BP Neural Network
Generalized projective synchronization between two chaotic gyros with nonlinear damping
 Generalized projective synchronization between two chaotic gyros with nonlinear damping Min Fu-Hong( ) Department of Electrical and Automation Engineering, Nanjing Normal University, Nanjing 210042, China
Generalized projective synchronization between two chaotic gyros with nonlinear damping Min Fu-Hong( ) Department of Electrical and Automation Engineering, Nanjing Normal University, Nanjing 210042, China
Research Paper. Varun Kumar 1*, Amit Kumar 2 ABSTRACT. 1. Introduction
 INTERNATIONAL JOURNAL OF R&D IN ENGINEERING, SCIENCE AND MANAGEMENT vol.1, issue I, AUG.2014 ISSN 2393-865X Research Paper Design of Adaptive neuro-fuzzy inference system (ANFIS) Controller for Active
INTERNATIONAL JOURNAL OF R&D IN ENGINEERING, SCIENCE AND MANAGEMENT vol.1, issue I, AUG.2014 ISSN 2393-865X Research Paper Design of Adaptive neuro-fuzzy inference system (ANFIS) Controller for Active
Element size effect on the analysis of heavy-duty machine cross-rail Jianhua Wang1,Jianke Chen1,a,Tieneng Guo1 Bin Song 2, Dongliang Guo3
 4th International Conference on Machinery, Materials and Computing Technology (ICMMCT 2016) Element size effect on the analysis of heavy-duty machine cross-rail Jianhua Wang1,Jianke Chen1,a,Tieneng Guo1
4th International Conference on Machinery, Materials and Computing Technology (ICMMCT 2016) Element size effect on the analysis of heavy-duty machine cross-rail Jianhua Wang1,Jianke Chen1,a,Tieneng Guo1
Vibration control systems for sensitive equipment: Limiting performance and optimal design
 Shock and Vibration 12 (2005) 37 47 37 IOS Press Vibration control systems for sensitive equipment: Limiting performance and optimal design V.M. Ryaboy Newport Corporation, 1791 Deere Avenue, Irvine, CA
Shock and Vibration 12 (2005) 37 47 37 IOS Press Vibration control systems for sensitive equipment: Limiting performance and optimal design V.M. Ryaboy Newport Corporation, 1791 Deere Avenue, Irvine, CA
Modal analysis of the Jalon Viaduct using FE updating
 Porto, Portugal, 30 June - 2 July 2014 A. Cunha, E. Caetano, P. Ribeiro, G. Müller (eds.) ISSN: 2311-9020; ISBN: 978-972-752-165-4 Modal analysis of the Jalon Viaduct using FE updating Chaoyi Xia 1,2,
Porto, Portugal, 30 June - 2 July 2014 A. Cunha, E. Caetano, P. Ribeiro, G. Müller (eds.) ISSN: 2311-9020; ISBN: 978-972-752-165-4 Modal analysis of the Jalon Viaduct using FE updating Chaoyi Xia 1,2,
ACTIVE VIBRATION CONTROL OF A SMART BEAM. 1. Department of Aeronautical Engineering, Middle East Technical University, Ankara, Turkey
 ACTIVE VIBRATION CONTROL OF A SMART BEAM Yavuz Yaman 1, Tarkan Çalışkan 1, Volkan Nalbantoğlu 2, Eswar Prasad 3, David Waechter 3 1 Department of Aeronautical Engineering, Middle East Technical University,
ACTIVE VIBRATION CONTROL OF A SMART BEAM Yavuz Yaman 1, Tarkan Çalışkan 1, Volkan Nalbantoğlu 2, Eswar Prasad 3, David Waechter 3 1 Department of Aeronautical Engineering, Middle East Technical University,
Research Article Modal and Vibration Analysis of Filter System in Petrochemical Plant
 Hindawi Shock and Vibration Volume 2017, Article ID 3685675, 13 pages https://doi.org/10.1155/2017/3685675 Research Article Modal and Vibration Analysis of Filter System in Petrochemical Plant hongchi
Hindawi Shock and Vibration Volume 2017, Article ID 3685675, 13 pages https://doi.org/10.1155/2017/3685675 Research Article Modal and Vibration Analysis of Filter System in Petrochemical Plant hongchi
Indian railway track analysis for displacement and vibration pattern estimation
 Indian railway track analysis for displacement and vibration pattern estimation M. Mohanta 1, Gyan Setu 2, V. Ranjan 3, J. P. Srivastava 4, P. K. Sarkar 5 1, 3 Department of Mechanical and Aerospace Engineering,
Indian railway track analysis for displacement and vibration pattern estimation M. Mohanta 1, Gyan Setu 2, V. Ranjan 3, J. P. Srivastava 4, P. K. Sarkar 5 1, 3 Department of Mechanical and Aerospace Engineering,
Research Article Active Control of Contact Force for a Pantograph-Catenary System
 Shock and Vibration Volume 26, Article ID 2735297, 7 pages http://dx.doi.org/.55/26/2735297 Research Article Active Control of Contact Force for a Pantograph-Catenary System Jiqiang Wang Jiangsu Province
Shock and Vibration Volume 26, Article ID 2735297, 7 pages http://dx.doi.org/.55/26/2735297 Research Article Active Control of Contact Force for a Pantograph-Catenary System Jiqiang Wang Jiangsu Province
Submitted to Chinese Physics C CSNS/RCS
 Study the vibration and dynamic response of the dipole girder system for CSNS/RCS Liu Ren-Hong ( 刘仁洪 ) 1,2;1) Wang Min( 王敏 ) 1 Zhang Jun-Song( 张俊嵩 ) 2 Wang Guang-Yuan ( 王广源 ) 2 1 No. 58 Research Institute
Study the vibration and dynamic response of the dipole girder system for CSNS/RCS Liu Ren-Hong ( 刘仁洪 ) 1,2;1) Wang Min( 王敏 ) 1 Zhang Jun-Song( 张俊嵩 ) 2 Wang Guang-Yuan ( 王广源 ) 2 1 No. 58 Research Institute
The use of transmissibility properties to estimate FRFs on modified structures
 Shock and Vibration 7 (00) 56 577 56 DOI 0./SAV-00-058 IOS Press The use of transmissibility properties to estimate FRFs on modified structures R.A.B. Almeida a,, A.P.V. Urgueira a and N.M.M. Maia b a
Shock and Vibration 7 (00) 56 577 56 DOI 0./SAV-00-058 IOS Press The use of transmissibility properties to estimate FRFs on modified structures R.A.B. Almeida a,, A.P.V. Urgueira a and N.M.M. Maia b a
Multiple damage detection in beams in noisy conditions using complex-wavelet modal curvature by laser measurement
 Multiple damage detection in beams in noisy conditions using complex-wavelet modal curvature by laser measurement W. Xu 1, M. S. Cao 2, M. Radzieński 3, W. Ostachowicz 4 1, 2 Department of Engineering
Multiple damage detection in beams in noisy conditions using complex-wavelet modal curvature by laser measurement W. Xu 1, M. S. Cao 2, M. Radzieński 3, W. Ostachowicz 4 1, 2 Department of Engineering
Synchronization of Chaotic Systems via Active Disturbance Rejection Control
 Intelligent Control and Automation, 07, 8, 86-95 http://www.scirp.org/journal/ica ISSN Online: 53-066 ISSN Print: 53-0653 Synchronization of Chaotic Systems via Active Disturbance Rejection Control Fayiz
Intelligent Control and Automation, 07, 8, 86-95 http://www.scirp.org/journal/ica ISSN Online: 53-066 ISSN Print: 53-0653 Synchronization of Chaotic Systems via Active Disturbance Rejection Control Fayiz
Filtered-X LMS vs repetitive control for active structural acoustic control of periodic disturbances
 Filtered-X LMS vs repetitive control for active structural acoustic control of periodic disturbances B. Stallaert 1, G. Pinte 2, S. Devos 2, W. Symens 2, J. Swevers 1, P. Sas 1 1 K.U.Leuven, Department
Filtered-X LMS vs repetitive control for active structural acoustic control of periodic disturbances B. Stallaert 1, G. Pinte 2, S. Devos 2, W. Symens 2, J. Swevers 1, P. Sas 1 1 K.U.Leuven, Department
Research Article Design of a Minimized Complementary Illusion Cloak with Arbitrary Position
 Antennas and Propagation Volume 25, Article ID 932495, 7 pages http://dx.doi.org/.55/25/932495 Research Article Design of a Minimized Complementary Illusion Cloak with Arbitrary Position Yan Shi, Lin Zhang,
Antennas and Propagation Volume 25, Article ID 932495, 7 pages http://dx.doi.org/.55/25/932495 Research Article Design of a Minimized Complementary Illusion Cloak with Arbitrary Position Yan Shi, Lin Zhang,
ACTIVE VIBRATION CONTROL PROTOTYPING IN ANSYS: A VERIFICATION EXPERIMENT
 ACTIVE VIBRATION CONTROL PROTOTYPING IN ANSYS: A VERIFICATION EXPERIMENT Ing. Gergely TAKÁCS, PhD.* * Institute of Automation, Measurement and Applied Informatics Faculty of Mechanical Engineering Slovak
ACTIVE VIBRATION CONTROL PROTOTYPING IN ANSYS: A VERIFICATION EXPERIMENT Ing. Gergely TAKÁCS, PhD.* * Institute of Automation, Measurement and Applied Informatics Faculty of Mechanical Engineering Slovak
Research Article The Characteristic Solutions to the V-Notch Plane Problem of Anisotropy and the Associated Finite Element Method
 Mathematical Problems in Engineering Volume 2013, Article ID 593640, 11 pages http://dx.doi.org/10.1155/2013/593640 Research Article The Characteristic Solutions to the V-Notch Plane Problem of Anisotropy
Mathematical Problems in Engineering Volume 2013, Article ID 593640, 11 pages http://dx.doi.org/10.1155/2013/593640 Research Article The Characteristic Solutions to the V-Notch Plane Problem of Anisotropy
Observer design for rotating shafts excited by unbalances
 Observer design for rotating shafts excited by unbalances R. S. Schittenhelm, Z. Wang, S. Rinderknecht Institute for Mechatronic Systems in Mechanical Engineering, Technische Universität Darmstadt, Germany
Observer design for rotating shafts excited by unbalances R. S. Schittenhelm, Z. Wang, S. Rinderknecht Institute for Mechatronic Systems in Mechanical Engineering, Technische Universität Darmstadt, Germany
Operator-based Modeling for Nonlinear Ionic Polymer Metal Composite with Uncertainties
 SCIS & ISIS, Dec. 8-,, Okayama Convention Center, Okayama, Japan Operator-based Modeling for Nonlinear Ionic Polymer Metal Composite with Uncertainties Mingcong Deng a, Aihui Wang b, Mamoru Minami b, and
SCIS & ISIS, Dec. 8-,, Okayama Convention Center, Okayama, Japan Operator-based Modeling for Nonlinear Ionic Polymer Metal Composite with Uncertainties Mingcong Deng a, Aihui Wang b, Mamoru Minami b, and
Research on the iterative method for model updating based on the frequency response function
 Acta Mech. Sin. 2012) 282):450 457 DOI 10.1007/s10409-012-0063-1 RESEARCH PAPER Research on the iterative method for model updating based on the frequency response function Wei-Ming Li Jia-Zhen Hong Received:
Acta Mech. Sin. 2012) 282):450 457 DOI 10.1007/s10409-012-0063-1 RESEARCH PAPER Research on the iterative method for model updating based on the frequency response function Wei-Ming Li Jia-Zhen Hong Received:
Structural System Identification (KAIST, Summer 2017) Lecture Coverage:
 Lecture Coverage:") Structural System Identification (KAIST, Summer 2017) Lecture Coverage: Lecture 1: System Theory-Based Structural Identification Lecture 2: System Elements and Identification Process Lecture 3: Time and
Structural System Identification (KAIST, Summer 2017) Lecture Coverage: Lecture 1: System Theory-Based Structural Identification Lecture 2: System Elements and Identification Process Lecture 3: Time and
Research Article The Stiffness Calculation and Optimization for the Variable Stiffness Load Torque Simulation System
 Hindawi International Aerospace Engineering Volume 2017, Article ID 3202318, 8 pages https://doi.org/10.1155/2017/3202318 Research Article The Stiffness Calculation and Optimization for the Variable Stiffness
Hindawi International Aerospace Engineering Volume 2017, Article ID 3202318, 8 pages https://doi.org/10.1155/2017/3202318 Research Article The Stiffness Calculation and Optimization for the Variable Stiffness
Research Article Vibration Control of the Boom System of Truck-Mounted Concrete Pump Based on Constant-Position Commandless Input Shaping Technique
 Shock and Vibration Volume 215, Article ID 42935, 9 pages http://dx.doi.org/1.1155/215/42935 Research Article Vibration Control of the Boom System of Truck-Mounted Concrete Pump Based on Constant-Position
Shock and Vibration Volume 215, Article ID 42935, 9 pages http://dx.doi.org/1.1155/215/42935 Research Article Vibration Control of the Boom System of Truck-Mounted Concrete Pump Based on Constant-Position
Research Article Vibration Response and Power Flow Characteristics of a Flexible Manipulator with a Moving Base
 Shock and Vibration Volume 5, Article ID 58957, 8 pages http://dx.doi.org/.55/5/58957 Research Article Vibration Response and Power Flow Characteristics of a Flexible Manipulator with a Moving Base Yufei
Shock and Vibration Volume 5, Article ID 58957, 8 pages http://dx.doi.org/.55/5/58957 Research Article Vibration Response and Power Flow Characteristics of a Flexible Manipulator with a Moving Base Yufei
Thermal deformation compensation of a composite beam using piezoelectric actuators
 INSTITUTE OF PHYSICS PUBLISHING Smart Mater. Struct. 13 (24) 3 37 SMART MATERIALS AND STRUCTURES PII: S964-1726(4)7973-8 Thermal deformation compensation of a composite beam using piezoelectric actuators
INSTITUTE OF PHYSICS PUBLISHING Smart Mater. Struct. 13 (24) 3 37 SMART MATERIALS AND STRUCTURES PII: S964-1726(4)7973-8 Thermal deformation compensation of a composite beam using piezoelectric actuators
Passive control applied to structural optimization and dynamic analysis of a space truss considering uncertainties
 Passive control applied to structural optimization and dynamic analysis of a space truss considering uncertainties F. A. Pires 1, P. J. P. Gonçalves 1 1 UNESP - Bauru/SP - Department of Mechanical Engineering
Passive control applied to structural optimization and dynamic analysis of a space truss considering uncertainties F. A. Pires 1, P. J. P. Gonçalves 1 1 UNESP - Bauru/SP - Department of Mechanical Engineering
Broadband Vibration Response Reduction Using FEA and Optimization Techniques
 Broadband Vibration Response Reduction Using FEA and Optimization Techniques P.C. Jain Visiting Scholar at Penn State University, University Park, PA 16802 A.D. Belegundu Professor of Mechanical Engineering,
Broadband Vibration Response Reduction Using FEA and Optimization Techniques P.C. Jain Visiting Scholar at Penn State University, University Park, PA 16802 A.D. Belegundu Professor of Mechanical Engineering,
1942. Effects of motion-induced aerodynamic force on the performance of active buffeting control
 1942. Effects of motion-induced aerodynamic force on the performance of active buffeting control Jie Sun 1, Min Li 2 School of Aeronautic Science and Engineering, Beijing University of Aeronautics and
1942. Effects of motion-induced aerodynamic force on the performance of active buffeting control Jie Sun 1, Min Li 2 School of Aeronautic Science and Engineering, Beijing University of Aeronautics and
Research Article The Absolute Deviation Rank Diagnostic Approach to Gear Tooth Composite Fault
 Shock and Vibration Volume 2017, Article ID 7285216, pages https://doi.org/.1155/2017/7285216 Research Article The Absolute Deviation Rank Diagnostic Approach to Gear Tooth Composite Fault Guangbin Wang,
Shock and Vibration Volume 2017, Article ID 7285216, pages https://doi.org/.1155/2017/7285216 Research Article The Absolute Deviation Rank Diagnostic Approach to Gear Tooth Composite Fault Guangbin Wang,
1427. Response and performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitations
 1427. Response and performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitations Yong Wang 1, Shunming Li 2, Jiyong Li 3, Xingxing Jiang 4, Chun Cheng 5 College
1427. Response and performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitations Yong Wang 1, Shunming Li 2, Jiyong Li 3, Xingxing Jiang 4, Chun Cheng 5 College
Open Access Damping Prediction Technique of the Bolted Joint Structure Considering Pretension Force
 Send Orders for Reprints to reprints@benthamscience.ae 622 The Open Civil Engineering Journal, 2015, 9, 622-626 Open Access Damping Prediction Technique of the Bolted Joint Structure Considering Pretension
Send Orders for Reprints to reprints@benthamscience.ae 622 The Open Civil Engineering Journal, 2015, 9, 622-626 Open Access Damping Prediction Technique of the Bolted Joint Structure Considering Pretension
Research Article Study on Elastic Dynamic Model for the Clamping Mechanism of High-Speed Precision Injection Molding Machine
 Shock and Vibration Volume 215, Article ID 427934, 13 pages http://dx.doi.org/1.1155/215/427934 Research Article Study on Elastic Dynamic Model for the Clamping Mechanism of High-Speed Precision Injection
Shock and Vibration Volume 215, Article ID 427934, 13 pages http://dx.doi.org/1.1155/215/427934 Research Article Study on Elastic Dynamic Model for the Clamping Mechanism of High-Speed Precision Injection
Vibration Analysis of a Horizontal Washing Machine, Part IV: Optimal Damped Vibration Absorber
 RESEARCH ARTICLE Vibration Analysis of a Horizontal Washing Machine, Part IV: Optimal Damped Vibration Absorber Galal Ali Hassaan Department of Mechanical Design & Production, Faculty of Engineering, Cairo
RESEARCH ARTICLE Vibration Analysis of a Horizontal Washing Machine, Part IV: Optimal Damped Vibration Absorber Galal Ali Hassaan Department of Mechanical Design & Production, Faculty of Engineering, Cairo
Laser on-line Thickness Measurement Technology Based on Judgment and Wavelet De-noising
 Sensors & Transducers, Vol. 168, Issue 4, April 214, pp. 137-141 Sensors & Transducers 214 by IFSA Publishing, S. L. http://www.sensorsportal.com Laser on-line Thickness Measurement Technology Based on
Sensors & Transducers, Vol. 168, Issue 4, April 214, pp. 137-141 Sensors & Transducers 214 by IFSA Publishing, S. L. http://www.sensorsportal.com Laser on-line Thickness Measurement Technology Based on