Basic Concepts of Adaptive Finite Element Methods for Elliptic Boundary Value Problems
|
|
|
- Donna Jordan
- 5 years ago
- Views:
Transcription
1 Department of Mathematics, University of Houston Basic Concepts of Adaptive Finite Element Methods for Elliptic Boundary Value Problems Ronald H.W. Hoppe 1,2 1 Department of Mathematics, University of Houston 2 Institute of Mathematics, University of Augsburg Mathematisches Forschungsinstitut Oberwolfach Oberwolfach, November, 2010
2 Foundations of AFEM I For a closed subspace V H 1 (Ω) we assume a(, ) : V V R to be a bounded, V-elliptic bilinear form, i.e., a(v,w) C v k,ω w k,ω, v,w V, a(v,v) γ v 2 k,ω, v V, for some constants C > 0 and γ > 0. We further assume l V where V denotes the algebraic and topological dual of V and consider the variational equation: Find u V such that a(u,v) = l(v), v V. It is well-known by the Lax-Milgram Lemma that under the above assumptions the variational problem admits a unique solution.
3 Foundations of AFEM II Finite element approximations are based on the Ritz-Galerkin approach: Given a finite dimensional subspace V h V of test/trial functions, find u h V h such that a(u h,v h ) = l(v h ), v h V h. Since V h V, the existence and uniqueness of a discrete solution u h V h follows readily from the Lax-Milgram Lemma. Moreover, we deduce that the error e u := u u h satisfies the Galerkin orthogonality a(u u h,v h ) = 0, v h V h, i.e., the approximate solution u h V h is the projection of the solution u V onto V h with respect to the inner product a(, ) on V (elliptic projection). Using the Galerkin orthogonality, it is easy to derive the a priori error estimate u u h 1,Ω M inf v h V h u v h 1,Ω, where M := C/γ. This result tells us that the error is of the same order as the best approximation of the solution u V by functions from the finite dimensional subspace V h. It is known as Céa s Lemma.
4 Foundations of AFEM III The Ritz-Galerkin method also gives rise to an a posteriori error estimate in terms of the residual r : V R In fact, it follows that for any v V r(v) := l(v) a(u h,v), v V. γ u u h 2 1,Ω a(u u h,u u h ) = r(u u h ) r 1,Ω u u h 1,Ω, whence u u h 1,Ω 1 γ sup r(v) v V v 1,Ω.
5 Foundations of AFEM IV Definition. An error estimator η h is called reliable, if it provides an upper bound for the error up to data oscillations osc rel h, i.e., if there exists a constant C rel > 0, independent of the mesh size h of the underlying triangulation, such that e u a C rel η h + osc rel h. On the other hand, an estimator η h is said to be efficient, if up to data oscillations osc eff h it gives rise to a lower bound for the error, i.e., if there exists a constant C eff > 0, independent of the mesh size h of the underlying triangulation, such that η h C eff e u a + osc eff h. Finally, an estimator η h is called asymptotically exact, if it is both reliable and efficient with C rel = C 1 eff.
6 Reliability and Efficiency of Error Estimators II Remark. The notion reliability is motivated by the use of the error estimator in error control. Given a tolerance tol, an idealized termination criterion would be e u a tol. Since the error e u a is unknown, we replace it with the upper bound, i.e., C rel η h + osc rel h tol. We note that the termination criterion both requires the knowledge of C rel and the incorporation of the data oscillation term osc rel and osc rel h 0, it reduces to η h tol. h. In the special case C rel = 1 An alternative, but less used termination criterion is based on the lower bound, i.e., we require 1 ( ) η C h osc eff h tol. eff Typically, this criterion leads to less refinement and thus requires less computational time which motivates to call the estimator efficient.
7 The error estimate The Role of the Residual u u h 1,Ω 1 γ sup r(v) v V v 1,Ω shows that in order to assess the error e u a we are supposed to evaluate the norm of the residual with respect to the dual space V, i.e., r V := r(v) sup. v V\{0} v a In particular, we have the equality r V = e u a, whereas for the relative error of r(v),v V, as an approximation of e u a we obtain ( e u a r(v)) = 1 e u a 2 v e u 2 e u a, v V with v a = 1. a The goal is to obtain lower and upper bounds for r V at relatively low computational expense.
8 Model problem: Let Ω be a bounded simply-connected polygonal domain in Euclidean space lr 2 with boundary Γ = Γ D Γ N, Γ D Γ N = and consider the elliptic boundary value problem Lu := (a u) = f in Ω, u = 0 on Γ D, n a u = g on Γ N, where f L 2 (Ω), g L 2 (Γ N ) and a = (a ij ) 2 i,j=1 is supposed to be a matrix-valued function with entries a ij L (Ω), that is symmetric and uniformly positive definite. The vector n denotes the exterior unit normal vector on Γ N. Setting H 1 0,Γ D (Ω) := { v H 1 (Ω) v ΓD = 0 }, the weak formulation is as follows: Find u H 1 0,Γ D (Ω) such that where a(v,w) := Ω a(u,v) = l(v), v H 1 0,Γ D (Ω), a v w dx, l(v) := f v dx + Ω Γ N g v dσ, v H 1 0,Γ D (Ω).
9 FE Approximation: Given a geometrically conforming simplicial triangulation T h of Ω, we denote by S 1,ΓD (Ω; T h ) := { v h H 1 0,Γ D (Ω) v h T P 1 (K), T T h } the trial space of continuous, piecewise linear finite elements with respect to T h. Note that P k (T), k 0, denotes the linear space of polynomials of degree k on T. In the sequel we will refer to N h (D) and E h (D), D Ω as the sets of vertices and edges of T h on D. We further denote by T the area, by h T the diameter of an element T T h, and by h E = E the length of an edge E E h (Ω Γ N ). We refer to f T := T 1 T fdx the integral mean of f with respect to an element T T h and to g E := E 1 E gds the mean of g with respect to the edge E E h(γ N ). The conforming P1 approximation reads as follows: Find u h S 1,ΓD (Ω; T h ) such that a(u h,v h ) = l(v h ), v h S 1,ΓD (Ω; T h ).
10 The residual r is given by r(v) := f v dx + Representation of the Residual I Ω Γ N g vds a(u h,v), v V. Applying Green s formula elementwise yields a(u h,v) = a u h v dx = [n a u h ] v ds + n a u h v ds, T T h T E E h (Ω) E E E h (Γ N ) E where [n a u h ] denotes the jump of the normal derivative of u h across E E h (Ω) and where we have used that u h 0 on T T h, since u h T P 1 (T). We thus obtain r(v) := r T (v) + r E (v). T T h E E h (Ω Γ N )
11 Department of Mathematics, University of Houston Representation of the Residual II Here, the local residuals r T (v),t T h, are given by r T (v) := (f Lu h )v dx, whereas for r E (v) we have r E (v) := r E (v) := E E T [n a u h ]v ds, E E h (Ω), (g n a u h ) v ds, E E h (Γ N ).
12 A Posteriori Error Estimator and Data Oscillations The error estimator η h consists of element residuals η T,T T h, and edge residuals η E,E E H (Ω Γ N ), according ( to 1/2, η h := ηt 2 + ηe) 2 T T h E E H (Ω Γ N ) where η T and η E are given by η T := h T f T Lu h 0,T, T T h, { h 1/2 η E := E [n a u h] 0,E, E E h (Ω), h 1/2 E g E n a u h 0,E, E E h (Γ N ). The a posteriori error analysis ( further invokes the data oscillations 1/2, osc h := osc 2 T(f) + osce(g)) 2 T T h E E h (Γ N ) where osc T (f) and osc E (g) are given by osc T (f) := h T f f T 0,T, osc E (g) := h 1/2 E g g E 0,E.
13 Clément s Quasi-Interpolation Operator I For p N h (Ω) N h (Γ N ) we denote by ϕ p the basis function in S 1,ΓD (Ω; T h ) with supporting point p, and we refer to D p as the set D p := { T T h p N h (T) }. We refer to π p as the L 2 -projection onto P 1 (D p ), i.e., (π p (v),w) 0,Dp = (v,w) 0,Dp, w P 1 (D p ), where (, ) 0,Dp stands for the L 2 -inner product on L 2 (D p ) L 2 (D p ). Then, Clément s interpolation operator P C is defined as follows P C : L 2 (Ω) S 1,ΓD (Ω, T h ), P C v := π P (v) ϕ P. p N h (Ω) N h (Γ N )
14 Clément s Quasi-Interpolation Operator II Theorem. Let v H 1 0,Γ D (Ω). Then, for Clément s interpolation operator there holds P C v 0,T C v 0,D (1) T v P C v 0,T C h T v 1,D (1) T Further, we have ( ( E E h (Ω) E h (Γ N ), P C v 0,E C v (1) 0,D E, v P C v 0,E C h 1/2 v 2 µ,d (1) T T T h v 2 µ,d (1) E, P C v 0,T C v (1) 0,D, T. E v 1,D (1) ) 1/2 C v µ,ω, 0 µ 1, ) 1/2 C v µ,ω, 0 µ 1. where D (1) T := { T T h N h (T ) N h (T) }, D (1) E := { T T h N h (E) N h (T ) }. E
15 Element and Edge Bubble Functions I The element bubble function ψ T is defined by means of the barycentric coordinates λ T i,1 i 3, according to ψ T := 27 λ T 1 λ T 2 λ T 3. Note that supp ψ T = T int, i.e., ψ T T = 0, T T h. On the other hand, for E E h (Ω) E h (Γ N ) and T T h such that E T and p E i N h (E), 1 i 2, we introduce the edge-bubble functions ψ E ψ E := 4 λ T 1 λ T 2. Note that ψ E E = 0 for E E h (T),E E.
16 Element and Edge Bubble Functions II The bubble functions ψ T and ψ E have the following important properties that can be easily verified taking advantage of the affine equivalence of the finite elements: Lemma. There holds p h 2 0,T C p h 2 0,E C T p 2 h ψ T dx, p 2 h ψ E dσ, p h P 1 (T), p h P 1 (E), E p h ψ T 1,T C h 1 T p h 0,T, p h P 1 (T), p h ψ T 0,T C p h 0,T, p h P 1 (T), p h ψ E 0,E C p h 0,E, p h P 1 (E).
17 Element and Edge Bubble Functions III For functions p h P 1 (E), E E h (Ω) E h (Γ N ) we further need an extension p E h L2 (T) where T T h such that E T. For this purpose we fix some E T, E E, and for x T denote by x E that point on E such that (x x E ) E. For p h P 1 (E) we then set p E h := p h (x E ). as the union of elements T T h con- Further, for E E h (Ω) E h (Γ N ) we define D (2) E taining E as a common edge D (2) E := { T T h E E h (T) }.
18 Department of Mathematics, University of Houston Lemma. There holds Element and Edge Bubble Functions IV p E h ψ E (2) 1,D E p E h ψ E (2) 0,D E C h 1/2 E p h 0,e, p h P 1 (E), C h 1/2 E p h 0,E, p h P 1 (E). Further, for all v V and µ = 0,1 there holds ( h 1 µ ) 1/2 C ( h 1 µ T v 2 µ,t) 1/2. T T h E E h (Ω) E h (Γ N ) E v 2 µ,d (2) E
19 Step MARK of the Adaptive Cycle: Bulk Criterion Given a universal constant 0 < Θ < 1, specify a set M T of elements and a set M E of edges such that (bulk criterion, Dörfler marking) ( Θ η 2 T + ) η 2 E η 2 T + η 2 E. T M T E M E T T H (Ω) E E H (Ω) Step REFINE of the Adaptive Cycle: Refinement Rules Any T M T,E M E is refined by bisection. Further bisection is used to create a geometrically conforming triangulation T h (Ω).
20 Department of Mathematics, University of Houston Adaptive Finite Element Methods for Unconstrained Optimal Elliptic Control Problems Ronald H.W. Hoppe 1,2 1 Department of Mathematics, University of Houston 2 Institute of Mathematics, University of Augsburg Institute for Mathematics and its Applications Minneapolis, November, 2010
21 Elliptic Optimal Control Problems: Unconstrained Case Let Ω be a bounded polygonal domain with boundary Γ = Ω. Given a desired state y d L 2 (Ω), f L 2 Ω), and α > 0, find (y,u) H 1 0(Ω) L 2 (Ω) such that inf J(y,u) := 1 2 (y,u) Ω y y d 2 dx + α 2 subject to y = u in Ω, y = 0 on Γ. Ω u 2 dx,
22 Reduced Optimality Conditions in y and p Substituting u in the state equation by p = αu, we arrive at the following system of two variational equations: a(y,v) α 1 (p,v) 0,Ω = l 1 (v), v V := H 1 0(Ω), a(p,w) + (y,w) 0,Ω = l 2 (w), w V, where the functionals lν : V lr,1 ν 2, are given by l 1 (v) := 0, v V, l 2 (w) := (y d,w) 0,Ω, w V. The operator-theoretic formulation reads L(y,p) = (l 1,l 2 ) T, where the operator L : V V V V is defined according to (L(y,p))(v,w) := a(y,v) α 1 (p,v) 0,Ω + a(p,w) + (y,w) 0,Ω.
23 Operator Theoretic Formulation of the Optimality System I Theorem. The operator L is a continuous, bijective linear operator. Hence, for any (l 1, l 2 ) V V the system admits a unique solution (y,p) V V. The solution depends continuously on the data according to (y,p) V V C (l 1,l 2 ) V V. Proof. The linearity and continuity are straightforward. For the proof of the inf-sup condition, we choose v = αy p and w = p + y. It follows that (L(y,p))(αy p,y + p) = α a(y,y) + a(p,p) + (y,y) 0,Ω + α 1 (p,p) 0,Ω, which allows to conclude.
24 Operator Theoretic Formulation of the Optimality System II Corollary. Let (y h,p h ) V h V h,v h V, be an approximate solution of (y,p) V V. Then, there holds (y y h,p p h ) V V C (Res 1,Res 2 ) V V, where the residuals Res 1 V,Res 2 V are given by Res 1 (v) := l 1 (v) a(y h,v) + α 1 (p h,v) 0,Ω, v V, Res 2 (w) := l 2 (w) a(p h,w) (y h,w) 0,Ω, w W. Proof. The assertion is an immediate consequence of the previous theorem.
25 Using Galerkin orthogonality and Clément s quasi-interpolation operator P C, for the first residual Res 1 we find Res 1 (v) = T T h (Ω) (f,v P C v) 0,T T T h (Ω) (a(u h,v P C v) + α 1 (p h,v P C v) 0,T ). By an elementwise application of Green s formula and the local approximation properties of P C it follows that ( Res 1 V C ηt,1 2 + The local residuals are given by T T h (Ω) E E h (Ω) η T,1 := h T y h + u h 0,T, η E,1 := h 1/2 E n [ y h] 0,E. η 2 E,1) 1/2,
26 Department of Mathematics, University of Houston Likewise, for the second residual Res 2 we obtain ( Res 2 V C ηt,2 2 + T T h (Ω) E E h (Ω) η 2 E,2) 1/2, where the local residuals are given by η T,2 := h T y d + p h y h 0,T, T T h (Ω), η E,2 := h 1/2 E n [ p h] 0,E, E E h (Ω).
27 Reliability of the Residual-Type A Posteriori Error Estimator Theorem. Let (y,p) V V and (y h,p h ) V h V h be the solutions of the continuous and discrete optimality system, respectively. Then, there holds where the estimator η h is given by η h := ( (y y h,p p h ) V V Cη h, T T h (Ω) (η 2 T,1 + η 2 T,2) + E E h (Ω) (η 2 E,1 + η 2 E,2)) 1/2.
28 Efficiency of the Residual-Type A Posteriori Error Estimator I Lemma. Let (y,p) V V and (y h,p h ) V h V h be the solutions of the continuous and discrete optimality system, respectively. Then, there exists a positive constant c depending only on the shape regularity of {T h (Ω)} such that for T T h (Ω) η 2 T,1 c ( y y h 2 1,T + h 2 T u u h 2 0,T). Proof. Setting z h := u h T ψ T and observing that y h T = 0, Green s formula and the fact that z h is an admissible test function imply η 2 T,1 = h 2 T u h 2 0,T c h 2 T (u h + y h,z h ) 0,T = c h 2 T ( a(y h,z h ) + (u,z h ) 0,T +(u h u,z h ) 0,T ) = c h 2 T (a(y y h,z h ) + (u h u,z h ) 0,T ) c( h 2 T y y h 1,T z h 1,T + h 2 T u u h 0,T z h 0,T ).
29 Department of Mathematics, University of Houston Proof cont d. By the property of the element bubble function and Young s inequality we obtain p h ψ T 1,T c h 1 T p h 0,T, p h P 1 (T), h 2 T u h 2 0,T c( y y h 2 1,T + h 2 T u u h 2 0,T) h2 T u h 2 0,T, which gives the assertion.
30 Efficiency of the Residual-Type A Posteriori Error Estimator II Lemma. Let (y,p) V V and (y h,p h ) V h V h be the solutions of the continuous and discrete optimality system, respectively. Then, there exists a positive constant c depending only on the shape regularity of {T h (Ω)} such that for T T h (Ω) η 2 T,2 c ( p p h 2 1,T + h 2 T y y h 2 0,T + osc 2 T), where osc T := h T y d y d h 0,T, T T h (Ω). Proof. The assertion can be proved along the same lines as in the previous lemma.
31 Efficiency of the Residual-Type A Posteriori Error Estimator III Lemma. Let (y,p) V V and (y h,p h ) V h V h be the solutions of the continuous and discrete optimality system, respectively. Then, there exists a positive constant c depending only on the shape regularity of {T h (Ω)} such that for E E h (Ω) η 2 E,1 c( y y h 2 1,ω E + h 2 E u u h 2 0,ω E + 2 ν=1 η2 T ν,1). Proof. We set ζ E := (n E [ y h ]) E and z h := ζ E ψ E. Then, applying Green s formula and observing that z h is an admissible test function, we find η 2 E,1 = h E n E [ y h ] 2 0,E c h E (n E [ y h ], ζ E ψ E ) 0,E = c h E = c h E (a(y h y,z h ) + (u u h,z h ) 0,ω E + (f + u h,z h ) 0,ω E ) c h 1/2 E ν E [ y h ] 0,E ( y y h 1,ω E (h E u u h 0,ω E + ( 2 ν=1 η2 Tν,1 ) 1/2 )), which allows to conclude. 2 ν=1 (n T ν [ y h ],z h ) 0, Tν
32 Efficiency of the Residual-Type A Posteriori Error Estimator IV Lemma. Let (y,p) V V and (y h,p h ) V h V h be the solutions of the continuous and discrete optimality system, respectively. Then, there exists a positive constant c depending only on the shape regularity of {T h (Ω)} such that for E E h (Ω) η 2 E,2 c( p p h 2 1,ω E + h 2 E y y h 2 0,ω E + 2 ν=1 η2 Tν,2 ). Proof. The proof is similar to the one in the previous lemma.
33 Efficiency of the Residual-Type A Posteriori Error Estimator V Theorem. Let (y,p) V V and (y h,p h ) V h V h be the solutions of the continuous and discrete optimality system, respectively. Then, there exist positive constants C and c depending only on Ω and the shape regularity of the triangulations such that (y y h,p p h ) 2 V V + u u h 2 0,Ω C η 2 h c osc 2 h. where osc 2 h := T T h (Ω) osc 2 T. Proof. Combining the results of the previous four lemmas gives the assertion.
34 Department of Mathematics, University of Houston Adaptive Finite Element Methods for Control Constrained Optimal Elliptic Control Problems Ronald H.W. Hoppe 1,2 1 Department of Mathematics, University of Houston 2 Institute of Mathematics, University of Augsburg Mathematisches Forschungsinstitut Oberwolfach Oberwolfach, November 2010
35 Department of Mathematics, University of Houston Model Problem (Distributed Elliptic Control Problem with Control Constraints) Given a bounded domain Ω lr 2 with polygonal boundary Γ = Ω, functions y d, ψ L 2 (Ω), and α > 0, consider the distributed optimal control problem Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u 2 0,Ω, over (y,u) H 1 0(Ω) L 2 (Ω), subject to y = u, u K := {v L 2 (Ω) v ψ a.e. in Ω}. 1
36 Optimality Conditions for the Distributed Control Problem There exists an adjoint state p H 1 0(Ω) and an adjoint control λ L 2 (Ω) such that the quadruple (y, p, u, λ) satisfies a(y,v) = (u,v) 0,Ω, v H1 0(Ω), a(p,v) = (y y d,v) 0,Ω, v H1 0(Ω), p = αu + λ), λ I K (u). In particular, the following complementarity conditions hold true: λ L 2 +(Ω), ψ u 0, (λ,ψ u) 0,Ω = 0. 1
37 Department of Mathematics, University of Houston Finite Element Approximation of the Distributed Control Problem Let T H (Ω) be a shape regular, simplicial triangulation of Ω and let V H := { v H C(Ω) v H T P 1 (T), T T H (Ω), v H Ω = 0 } be the FE space of continuous, piecewise linear finite elements. Consider the following FE Approximation of the distributed control problem Minimize J(y h,u h ) := 1 2 y h y d 2 0,Ω + α 2 u h 2 0,Ω, over (y h,u h ) V h V h, subject to a(y h,v h ) = (u h,v h ) 0,Ω, v h V h, u h K h := {v h V h v h ψ a.e. in Ω}. 1
38 Optimality Conditions for the FE Discretized Control Problem There exists an adjoint state p h V h and an adjoint control λ h V h such that the quadraduple (y h,p h,u h,λ h ) satisfies a(y h,v h ) = (u h,v h ) 0,Ω, v h V h, a(p h,v h ) = (y h y d,v h ) 0,Ω, v h V h, p h = αu h + λ h ), λ h I Kh (u h ). The following complementarity conditions hold true: λ h 0, ψ u h 0, (λ h,ψ u h ) 0,Ω = 0. 1
39 Department of Mathematics, University of Houston The A Posteriori Error Estimator
40 Element and Edge Residuals for the State and the Adjoint State (i) Element and edge residuals for the state y ( η y := η 2 y,t + T T h (Ω) E E h (Ω) ) 1/2 η 2 y,e η y,t := h T u h 0,T }{{} element residuals, T T h (Ω), η y,e := h 1/2 E ν E [ y h ] }{{ 0,E } edge residuals (ii) Element and edge residuals for the adjoint state p ( η p := η 2 p,t + T T h (Ω) E E h (Ω) η 2 p,e ) 1/2, E E h (Ω) η (1) p,t := h T y d y h 0,T }{{} element residuals, η p,e := h 1/2 E ν E [ p h ] }{{ 0,E, E E } h (Ω) edge residuals
41 Department of Mathematics, University of Houston Reliability of the Error Estimator
42 Reliability of the A Posteriori Error Estimator Theorem Let (y,p,u,λ) be the solution of the distributed control problem and (y h,p h,u h, λ h ) be the finite element approximation with respect to the triangulation T h (Ω). Further, let η be the residual type error estimator. Then, there exists a positive constant C, depending only on α, Ω and on the shape regularity of the triangulation T h (Ω) such that y y h 2 1,Ω + p p h 2 1,Ω + u u h 2 0,Ω + λ λ h 2 0,Ω C η 2.
43 Department of Mathematics, University of Houston Important Tool in the Error Analysis: Intermediate State and Adjoint State Given a discrete control u h V h, the intermediate state y(u h ) H 1 0 (Ω) and the intermediate adjoint state p(u h ) H 1 0 (Ω) are the unique solutions of the variational equations a(y(u h ),v) = (u h,v) 0,Ω, v H1 0(Ω), a(p(u h ),v) = (y(u h ) y d,v) 0,Ω, v H1 0 (Ω). Lemma. Let y(u h ) and p(u h ) be the intermediate state and adjoint state. Then, we have (p p(u h ),u u h ) 0,Ω = y y(u h ) 2 0,Ω 0. Proof: Obviously, there holds a(y y(u h ),v 1 ) = (u u h,v 1 ) 0,Ω, a(p p(u h ),v 2 ) = (y(u h ) y,v 2 ) 0,Ω, v 1,v 2 H 1 0 (Ω). The assertion follows readily by choosing v 1 := p p(u h ) and v 2 := y y(u h ). 1
44 Department of Mathematics, University of Houston Proof. Since u = α 1 (p λ), u h = α 1 (p h λ h ), we have α u u h 2 0,Ω = (λ h λ,u u h ) 0,Ω + (p p h,u u h ) 0,Ω. Using the complementarity conditions for λ and λ h, we find (λ h λ,u u h ) 0,Ω = (λ h,u ψ) }{{ 0,Ω } 0 0. (λ,u ψ) 0,Ω }{{} = 0 (λ, ψ u h ) 0,Ω }{{} 0 Moreover, for the remaining term there holds (p p h,u u h ) 0,Ω (p p(u h ),u u h ) 0,Ω }{{} 0 + (σ h,ψ u H ) 0,Ω }{{} = 0 + (p(u h ) p h,u u h ) 0,Ω,
45 Department of Mathematics, University of Houston Numerical Example: Distributed Control Problem with Control Constraints Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u ud 2 0,Ω, over (y,u) H 1 0(Ω) L 2 (Ω), subject to y = f + u, u K := {v L 2 (Ω) v ψ a.e. in Ω}. Data: y d := sin(2πx 1 ) sin(2πx 2 ) exp(2x 1 )/6, α := 0.01, u d := 0, ψ := 0, f := 0.
46
47
48 Numerical Results: Adaptive FEM for a Distributed Control Problem Initial triangulation and triangulation after 6 refinement steps ( Θ = 0.6)
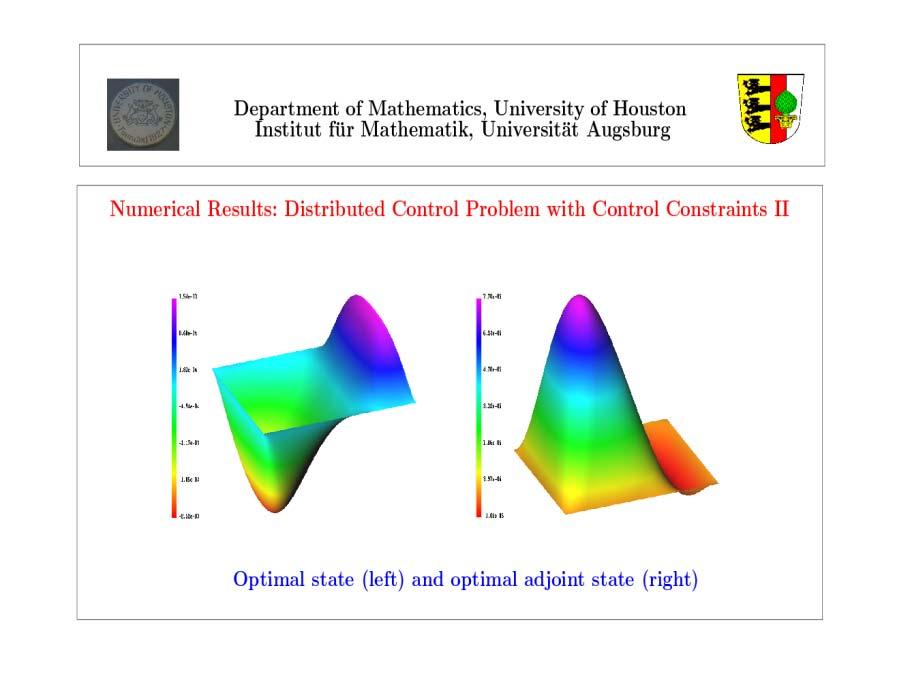
49 Numerical Results: Distributed Control Problem with Control Constraints I l N dof z z H y y H 1 p p H 1 u u H 0 λ λ H e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e-05 Total error, errors in the state, adjoint state, control, adjoint control (Θ = 0.7)
50 Numerical Results: Distributed Control Problem with Control Constraints I l N dof η y η p osc h (y d ) e e e e e e e e e e e e e e e e e e e e e e e e e e e-05 Components of the error estimator and data oscillations (Θ = 0.7)
51 Numerical Results: Distributed Control Problem with Control Constraints II Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u ud 2 0,Ω over (y,u) H 1 0(Ω) L 2 (Ω) subject to y = f + u in Ω, u K := {v L 2 (Ω) v ψ a.e. in Ω} û := Data: Ω := (0,1) 2, y d := 0, u d := û + α 1 (ˆσ + 2 û), (x ψ := 1 0.5) 8, (x 1,x 2 ) Ω 1, (x 1 0.5) 2, α := 0.1, f := 0, otherwise ψ, (x 1,x 2 ) Ω 1 Ω 2, 1.01 ψ, otherwise, ˆσ := 2.25 (x ) 10 4, (x 1,x 2 ) Ω 2, 0, otherwise Ω 1 := {(x 1,x 2 ) Ω ((x 1 0.5) 2 + (x 2 0.5) 2 ) 1/2 0.15}, Ω 2 := {(x 1,x 2 ) Ω x }.,
52
53
54 Numerical Results: Distributed Control Problem with Control Constraints II Grid after 6 (left) and 8 (right) refinement steps ( Θ = 0.6)
55 Numerical Results: Distributed Control Problem with Control Constraints II l N dof z z H y y H 1 p p H 1 u u H 0 λ λ H e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e-07 Total error, errors in the state, adjoint state, control, adjoint control (Θ = 0.6)
56 Numerical Results: Distributed Control Problem with Control Constraints II Decrease in the quantity of interest versus total number of DOFs
57 Department of Mathematics, University of Houston The Goal Oriented Dual Weighted Approach for State Constrained Elliptic Optimal Control Problems Ronald H.W. Hoppe 1,2 1 Department of Mathematics, University of Houston 2 Institute of Mathematics, University of Augsburg Mathematisches Forschungsinstitut Oberwolfach Oberwolfach, November 2010
58 Department of Mathematics, University of Houston Goal-Oriented Dual Weighted Approach
59 Goal-Oriented Dual Weighted Approach I The goal oriented dual weighted approach allows to control the error e u := u u h with respect to a rather general error functional or output functional J : V H 1 (Ω) lr. The goal oriented dual weighted approach strongly uses the solution z V of the associated dual problem a(v,z) = J(v), v V, and its finite element approximation z h V h, i.e., a(v h,z h ) = J(v h ), v h V h. Using Galerkin orthogonality, we readily deduce that J(e u ) = a(e u,z) = a(e u,z v h ) = r(z v h ), v h V h, where r( ) stands for the residual with respect to the computed finite element approximation u h.
60 Goal-Oriented Dual Weighted Approach II Theorem. Let u h V h := S 1,Γ (Ω; T h (Ω)) be the conforming P1 approximation of the solution u H 1 0(Ω) of Poisson s equation with f L 2 (Ω) and homogeneous Dirichlet boundary data. Then, the following error representation holds true J(e u ) = ) ((r T,z v h ) 0,T + (r T,z v h ) 0, T, v h V h, T T h (Ω) where the element residuals r T and the edges residuals r T are given by { 1 r T := f, T T h (Ω), r T E := 2 ν E [ u h ], E E h ( T Ω) 0, E E h ( T Γ) Moreover, we have the error estimate J(e u ) η DW := ω T ρ T, T T h (Ω) where for v h V h the element residuals ρ T and the weights ω T read ( 1/2, ( 1/2. ρ T := r T 2 0,T + h 1 T r T 0, T) 2 ωt := z v h 2 0,T + h T z v h 0, T) 2
61 Department of Mathematics, University of Houston Goal-Oriented Dual Weighted Approach III We remark that the previous result is not really a posteriori, since the solution z V of the dual solution is not known. Therefore, information about the weights ω T,T T h (Ω) has to be provided either by means of an a priori analysis or by the numerical solution of the dual problem. Theorem. Under the assumptions of the previous theorem let the error functional be given by Then, there holds J(v) := ( v, e u) 0,Ω e u 0,Ω, v V. e u 0,Ω C ( T T h (Ω) h 2 T ρ 2 T) 1/2.
62 Proof. The dual solution z V satisfies a(v,z) = ( v, e u) 0,Ω e u 0,Ω, v V, from which we readily deduce the a priori bound z 0,Ω 1. In view of the basic error estimate it follows that ( ) 1/2 ( J(e u ) = e u 0,Ω h 2 T ρ 2 T T T h (Ω) T T h (Ω) h 2 T ω2 T) 1/2. Choosing v h = P C z, where P C is Clément s quasi-interpolation operator, we find ( 1/2 inf (h 2 T z v h 2 0,T + h 1 T z v h 0, T) 2 C z 0,Ω. v h V h T T h (Ω) Using the last inequality in the previous one and observing the error representation gives the assertion.
63 Goal-Oriented Dual Weighted Approach IV Theorem. Consider the conforming P1 approximation of Poisson s equation under homogeneous Dirichlet boundary conditions and assume that the solution u V := H 1 0(Ω) is 2-regular. Using the the error functional J(v) := (v,e u) 0,Ω e u 0,Ω, v V, gives rise to the a posteriori error estimate ( e u 0,Ω C T T h (Ω) h 4 T ρ 2 T) 1/2.
64 Goal-Oriented Dual Weighted Approach V Finally, we apply the goal-oriented dual weighted approach to the pointwise estimation of the error at some point a Ω. Given some tolerance ε > 0, we consider the ball K ε (a) := {x Ω x a < ε} around the point a and define the regularized error functional J(v) := Kε(a) 1 v dx. Kε (a) The dual solution z of a(v,z) = J(v) behaves like a regularized Green s function With the residual ρ T we obtain z(x) log(r(x)), r(x) := x a 2 + ε 2. (u u h )(a) T T h (Ω) h 3 T r 2 T ρ T, r T := max x T r(x).
65 Department of Mathematics, University of Houston Goal-Oriented Dual Weighted Approach for State Constrained Elliptic Optimal Control Problems
66 Department of Mathematics, University of Houston C O N T E N T S Representation of the error in the quantity of interest Primal-Dual Weighted Residuals Primal-Dual Mismatch in Complementarity Primal-Dual Weighted Data Oscillations Numerical Results
67 Department of Mathematics, University of Houston State Constrained Elliptic Control Problems
68 Literature on State-Constrained Optimal Control Problems M. Bergounioux, K. Ito, and K. Kunisch (1999) M. Bergounioux, M. Haddou, M. Hintermüller, and K. Kunisch (2000) M. Bergounioux and K. Kunisch (2002) E. Casas (1986) E. Casas and M. Mateos (2002) J.-P. Raymond and F. Tröltzsch (2000) K. Deckelnick and M. Hinze (2006) M. Hintermüller and K. Kunisch (2007) K. Kunisch and A. Rösch (2002) C. Meyer and F. Tröltzsch (2006) C. Meyer, U. Prüfert, and F. Tröltzsch (2005) U. Prüfert, F. Tröltzsch, and M. Weiser (2004) H./M. Kieweg (2007) A. Günther, M. Hinze (2007) O. Benedix, B. Vexler (2008) M. Hintermüller/H. (2008) W. Liu, W. Gong and N. Yan (2008)
69 Model Problem (Distributed Elliptic Control Problem with State Constraints) Let Ω lr 2 be a bounded domain with boundary Γ = Γ D Γ N, Γ D Γ N =, and let A : V H 1 (Ω), V := {v H 1 (Ω) v Γd = 0}, be the linear second order elliptic differential operator Ay := y + cy, c 0, with c > 0 or meas(γ D ) > 0. Assume that Ω is such that for each v L 2 (Ω) the solution y of Ay = u satisfies y W 1,r (Ω) V for some r > 2. Moreover, let u d,y d L 2 (Ω), and ψ W 1,r (Ω) such that ψ ΓD > 0 be given functions and let α > 0 be a regularization parameter. Consider the state constrained distributed elliptic control problem Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u ud 2 0,Ω, subject to Ay = u in Ω, y = 0 on Γ D, ν y = 0 on Γ N, Iy K := {v C(Ω) v(x) ψ(x), x Ω}. where I stands for the embedding operator W 1,r (Ω) C(Ω).
70 Department of Mathematics, University of Houston We introduce the control-to-state map The Reduced Optimal Control Problem G : L 2 (Ω) C(Ω), y = Gu solves Ay + cy = u. We assume that the following Slater condition is satisfied (S) There exists v 0 L 2 (Ω) such that Gv 0 int(k). Substituting y = Gu allows to consider the reduced control problem inf u U ad J red (u) := 1 2 Gu yd 2 0,Ω + α 2 u ud 2 0,Ω, U ad := {v L 2 (Ω) (Gv)(x) ψ(x), x Ω}. Theorem (Existence and uniqueness). The state constrained optimal control problem admits a unique solution y W 1,r (Ω) K.
71 Optimality Conditions for the State Constrained Optimal Control Problem Theorem. There exists an adjoint state p V s := {v W 1,s (Ω) v ΓD = 0}, where 1/r + 1/s = 1, and a multiplier σ M + (Ω) such that ( y, v) 0,Ω + (cy,v) 0,Ω = (u,v) 0,Ω, v V s, ( p, w) 0,Ω + (cp,w) 0,Ω = (y y d,w) 0,Ω + σ,w, w Vr, p + α(u u d ) = 0, σ,y ψ = 0.
72 Department of Mathematics, University of Houston Proof. The reduced problem can be written in unconstrained form as inf Ĵ(v) := J red (v) + (I K G)(u) v L 2 (Ω) where I K stands for the indicator function of the constraint set K. The Slater condition and and subdifferential calculus tell us ( ) I K G (u) = G I K (Gu). The optimality condition then reads 0 Ĵ(u) = J red (u) + G I K (Gu). Hence, there exists σ I K (Gu) such that ( ) G (Gu y d + σ) +α(u u }{{} d ),v = 0, v 0,Ω L2 (Ω). =: p Since σ M(Ω), PDE regularity theory implies p W 1,s (Ω),1/s + 1/r = 1.
73 Department of Mathematics, University of Houston Finite Element Approximation Let T l (Ω) be a simplicial triangulation of Ω and let V l := { v l C(Ω) v l T P 1 (T), T T l (Ω), v l ΓD = 0 } be the FE space of continuous, piecewise linear functions. Let u d l V l be some approximation of ud, and let ψ l be the V l -interpoland of ψ. Consider the following FE Approximation of the state constrained control problem Minimize J l (y l,u l ) := 1 2 y l yd 2 0,Ω + α 2 u l ud l 2 0,Ω, over (y l,u l ) V l V l, subject to ( y l, v l ) 0,Ω + (cy l,v l ) 0,Ω = (u l,v l ) 0,Ω, v l V l, y l K l := {v l V l v l (x) ψ l (x), x Ω}. Since the constraints are point constraints associated with the nodal points, the discrete multipliers are chosen from M l := {µ l M(Ω) µ l = a N l (Ω Γ N ) κ a δ a, κ a lr}.
74 Department of Mathematics, University of Houston Representation of the Error in the Quantity of Interest
75 Department of Mathematics, University of Houston Primal-Dual Weighted Error Representation I We set X := V r L 2 (Ω) V s as well as X l := V l V l V l and introduce the Lagrangians L : X M(Ω) lr as well as L l : X l M l lr according to L(x, σ) := J(y,u) + ( y, p) 0,Ω (u,p) 0,Ω + σ,y ψ, L l (x l, σ l ) := J l (y l,u l ) + ( y l, p l ) 0,Ω (u l,p l ) 0,Ω + σ l,y l ψ l, where x := (y,u,p) and x l := (y l,u l,p l ). Then, the optimality conditions can be stated as x L(x, σ)(ϕ) = 0, ϕ X, x L l (x l, σ l )(ϕ l ) = 0, ϕ l X l.
76 Department of Mathematics, University of Houston Primal-Dual Weighted Error Representation II Theorem. Let (x, σ) X and (x l, σ l ) X l be the solutions of the continuous and discrete optimality systems, respectively. Then, there holds J(y,u) J l (y l,u l ) = 1 2 xxl(x l x,x l x) + σ,y l ψ + osc (1) l, where the data oscillations osc (1) l are given by osc (1) l := osc (1) T T l (Ω) T, osc (1) T := (y l y d l,yd l yd ) 0,T yd y d l 2 0,T + α (u l u d l,ud l ud ) 0,T + α 2 ud u d l 2 0,T. Remark: In the unconstrained case, i.e., σ = σ l = 0, the above result reduces to the error representation in [Becker, Kapp, and Rannacher (2000)].
77 Department of Mathematics, University of Houston Interpolation Operators (State Constraints) We introduce interpolation operators i y l : V r V l, r > r > 2, i p l : V s V l, 0 < s < s < 2, such that for all y V r and p V s there holds ( ( ( h r(t 1) T i y l y y r t,r,t h r T iy l y y r 0,r,T + h r/2 T h s T ip l p p s 0,s,T + h s/2 T where D T := {T T l (Ω) N l (T ) N l (T) }. ) 1/r y 1,r,DT, 0 t 1, i y l y y r 0,r, T i p l p p s 0,s, T ) 1/r y 1,r,DT, ) 1/s h T p 1,s,DT, 1
78 Primal-Dual Weighted Error Representation III Theorem. Under the assumptions of the previous Theorem let i z l,z {y,p}, be the interpolation operators introduced before. Then, there holds J(y,u) J l (y l,u l ) = (r(i y l y y) + r(ip l p p)) + µ l (x, σ) + osc(1) l where r(i y l y y) and r(ip l p p) stand for the primal-dual weighted residuals + osc (2) l, r(i y l y y) := 1 2 ((y l yd l,iy l y y) 0,Ω + ( (i y l y y, p l ) 0,Ω + σ l,i y l y y ), r(i p l p p) := 1 2 (( (ip l p p, y l ) 0,Ω (u l,i p l p p) 0,Ω). Moreover, µ l (x, σ) represents the primal-dual mismatch in complementarity and osc (2) l osc (2) l are further oscillation terms := µ l (x, σ) := 1 2 ( σ,y l ψ + σ l, ψ l y ), T T l (Ω) osc (2) T, osc (2) T := 1 2 ((yd y d l,y l y) 0,T + α (u d u d l,u l u) 0,T).
79 Department of Mathematics, University of Houston Primal-Dual Weighted Residuals
80 Primal-Dual Weighted Residuals Theorem. The primal-dual residuals can be estimated according to r(i y l y y) C ( ω y T ρy T + ωσ T ρ σ ) T, r(i p l p p) C ω p T ρp T. T T l (Ω) T T l (Ω) Here, ρ y T and ρp T are Lr -norms and L s -norms of the residuals associated with the state and the adjoint state equation ( ρ y T := u l r 0,r,T + h r/2 T 1 ) 1/r 2 ν [ y l ] r 0,r, T, ( ρ p T := y l y l d s 0,s,T + h s/2 T 1 ) 1/s 2 ν [ p l ] s 0,s, T. The corresponding dual weights ω y T and ωp T are given by ( ) 1/s ω y T := i p l p p s 0,s,T + h s/2 T ip l p p s 0,s, T, ( ) 1/r ω p T := i y l y y r 0,r,T + h r/2 T iy l y y r 0,r, T. The residual ρ σ T and its dual weight ωσ T are given by ρ σ T := n 1 a κ a, ω σ T := i y l y y 2/r+ε,r,T, 0 < ε < (r 2)/r. a N l (T)
81 Department of Mathematics, University of Houston Primal-Dual Mismatch in Complementarity
82 Department of Mathematics, University of Houston Primal-Dual Mismatch in Complementarity The primal-dual mismatch µ l (x, σ) can be made partially a posteriori in the following two particular cases (cf. [Bergounioux/Kunisch (2003)]): Regular Case Nonregular Case The active set A is the union of a finite num- The active set A is a Lipschitzian curve ber of mutually disjoint, connected sets A i, that divides Ω into two connected com- 1 i m, with C 1,1 -boundary. ponents Ω + and Ω. p I H 2 (I), p int(a) H 2 (int(a)) ( p, w) 0,Ω = (y d y,w) σ,w, w V r p = y d y in I, p = α ψ in A { 0 on I σ A = y d ψ α 2 ψ on A σ = σ A + σ F, σ F = p I ν I + α ψ ν A σ = σ A := ν A p A+ ν A p A
83 Department of Mathematics, University of Houston Primal-Dual Mismatch in Complementarity The primal-dual mismatch in complementarity has the representations µ l I Il = 1 2 (σ F,y l ψ) 0,F Il µ l I Al = 1 2 (σ F, ψ l ψ) 0,F Al a N l (F l I) a N l (I A l ) κ a (y l y)(a), κ a (ψ l y)(a), µ l A Il = 1 2 (σ F,y l ψ) 0,F Il (yd ψ α 2 ψ,y l ψ) 0,A Il, µ l A Al = 1 2 (σ F, ψ l ψ) 0,F Al (yd ψ α 2 ψ, ψ l ψ) 0,A Al. Hence, we need appropriate approximations of the continuous coincidence set A, the continuous non-coincidence set I, the continuous free boundary F, and of σ F.
84 Department of Mathematics, University of Houston Primal-Dual Mismatch in Complementarity (State Constraints) The coincidence set A and the non-coincidence set I will be approximated by  l := {T T l χ A l (x) 1 κh for all x T}, where Î l := {T T l χ A l (x) 1 κh for some x T}, χ A l := I ψ i y l y l γh r + ψ i y l y l, 0 < γ 1, r > 0. Note that for T A we have ( ) χ(a) χ A l 0,T min T 1/2, γ 1 h r y i y l y 0,T 0 for y i y l y 0,T = O(h q ), q > r. Moreover, σ F will be approximated by σ ˆF l := { νîl p l Îl + α νâl ψ, E T l (Â) T l (Î) νâl p l Âl,+ νâl p l Âl,, E E l (Â) \ ( T l (Â) T l (Î)).
85 Primal-Dual Mismatch in Complementarity (State Constraints) The primal-dual mismatch in complementarity can be estimated from above as follows: µ l I Il ˆµ (1) l + ˆµ(2) l, µ l I A l ˆµ (1) l + ˆµ(3) l, µ l A I l ˆµ (1) l + ˆµ(4) l, µ l A A l ˆµ (1) l + ˆµ(5) l. where ˆµ (1) := ˆµ (1) l E, ˆµ (1) E := 1 2 σ ˆF l 0,E y l ψ 0,E, ˆµ (2) l := ˆµ (3) l := ˆµ (4) l := ˆµ (5) l := E E l ( ˆF l ) E E l (F l Î l ) T T l (Î l A l ) T T l ( l I l ) T T l ( l A l ) ˆµ (2) E, ˆµ (2) E := 1 2 ˆµ (3) T, ˆµ (3) T := 1 2 a N l (E) a N l (T) (y l i y l y l )(a) κ a, y l i y l y l )(a) κ a,, ˆµ (4) T, ˆµ (4) T := 1 2 yd ψ α 2 ψ 0,T y l ψ 0,T, ˆµ (5) T, ˆµ (5) T := 1 2 yd ψ α 2 ψ 0,T ψ l ψ 0,T.
86 Department of Mathematics, University of Houston Primal-Dual Weighted Data Oscillations
87 Department of Mathematics, University of Houston Primal-Dual Weighted Data Oscillations The data oscillations osc (2) l := osc (2) l T T l (Ω) as given by osc (2) T, osc (2) T := 1 2 ( ) (y d y l d,y l y) 0,T + α (u d u d l,u l u) 0,T can be estimated from above according to osc (2) ôsc (2) l T, ôsc (2) T := ˆωp T ud u d l 0,T + ˆω y T yd y l d 0,T + α u d u d l 2 0,T, T T l (Ω), where the weights ˆω p T and ˆωy T are given by ˆω p T := ip l p l p l 0,T, ˆω y T := iy l y l y l 0,T.
88 Department of Mathematics, University of Houston State Constraints: Numerical Results
89 Numerical Results: Distributed Control Problem with State Constraints I Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u ud 2 0,Ω over (y,u) H 1 0(Ω) L 2 (Ω) subject to y = u in Ω, y K := {v H 1 0(Ω) v ψ a.e. in Ω} Data: Ω := ( 2, +2) 2, y d (r) := y(r) + p(r) + σ(r), u d (r) := u(r) + α 1 p(r), ψ := 0, α := 0.1, where y(r),u(r),p(r), σ(r) is the solution of the problem: y(r) := r 4/3 + γ 1 (r), u(r) = y(r), p(r) = γ 2 (r) + r r r2, σ(r) :=, γ 1 := γ 2 := 1, r < (r 0.25) (r 0.25) 4 80(r 0.25) 3 + 1, 0.25 < r < , otherwise { 1, r < , otherwise. { 0.0, r < , otherwise,

 and")
90 Numerical Results: Distributed Control Problem with State Constraints I Optimal state (left) and optimal control (right)
91 Numerical Results: Distributed Control Problem with State Constraints I 10 3 J(y *,u * ) - J h (y * h,u* h ) θ = 0.3 uniform Decrease in the quantity of interest versus total number of DOFs N
92 Department of Mathematics, University of Houston Numerical Results: Distributed Control Problem with State Constraints II Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u ud 2 0,Ω over (y,u) H 1 (Ω) L 2 (Ω) subject to y + cy = u in Ω, y K := {v H 1 (Ω) v ψ a.e. in Ω} Data: Ω = B(0,1) := {x = (x 1,x 2 ) T x x 2 2 < 1}, y d (r) := π 1 4π r π ln(r), u d (r) := π r2 1 ln(r), ψ := 4 + r, α := 1. 2π The solution y(r),u(r),p(r), σ(r) of the problem is given by y(r) 4, u(r) 4, p(r) = 1 4π r2 1 2π ln(r), σ(r) = δ 0.
93 Numerical Results: Distributed Control Problem with State Constraints II Optimal state (left) and optimal control (right)
 and mesh after 16 adaptive loops")
94 Numerical Results: Distributed Control Problem with State Constraints II Optimal adjoint state (left) and mesh after 16 adaptive loops (right)
95 Numerical Results: Distributed Control Problem with State Constraints II θ = 0.3 uniform J(y *,u * ) - J h (y * h,u* h ) Decrease in the quantity of interest versus total number of DOFs N
96 Department of Mathematics, University of Houston Control Constrained Elliptic Control Problems
97 Department of Mathematics, University of Houston A Posteriori Error Analysis of AFEM for Optimal Control Problems (i) Unconstrained problems R. Becker, H. Kapp, R. Rannacher (2000) R. Becker, R. Rannacher (2001) (ii) Control constrained problems W. Liu and N. Yan (2000/01) R. Li, W. Liu, H. Ma, and T. Tang (2002) M. Hintermüller/H. et al. (2006) A. Gaevskaya/H. et al. (2006/07) A. Gaevskaya/H. and S. Repin (2006/07) M. Hintermüller/H. (2007) B. Vexler and W. Wollner (2007)
98 Department of Mathematics, University of Houston Model Problem (Distributed Elliptic Control Problem with Control Constraints) Given a bounded domain Ω R 2 with polygonal boundary Γ = Ω, a function y d, ψ L 2 (Ω), and α > 0, consider the distributed optimal control problem Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u 2 0,Ω, over (y,u) H 1 0(Ω) L 2 (Ω), subject to y = u, u K := {v L 2 (Ω) v ψ a.e. in Ω}. 1
99 Department of Mathematics, University of Houston Optimality Conditions for the Distributed Control Problem There exists an adjoint state p H 1 0(Ω) and an adjoint control σ L 2 (Ω) such that the quadruple (y, p, u, σ) satisfies a(y,v) = (u,v) 0,Ω, v H1 0(Ω), a(p,v) = (y d y,v) 0,Ω, v H1 0(Ω), α u = p σ, σ 0, u ψ, (σ;u ψ) 0,Ω = 0, where a(, ) stands for the bilinear form a(w, z) = w z dx, w,z H 1 0(Ω). Ω 1
100 Finite Element Approximation of the Distributed Control Problem Let T l (Ω) be a shape regular, simplicial triangulation of Ω and let V l := { v l C(Ω) v l T P k1 (T), T T l (Ω), k 1 N, v H Ω = 0 } be the FE space of continuous, piecewise polynomial functions (of degree k 1 ) and W l := { w l L 2 (Ω) w l T P k2 (T), T T l (Ω), k 2 N {0} } the linear space of elementwise polynomial functions (of degree k 2 ). Consider the following FE Approximation of the distributed control problem Minimize J l (y l,u l ) := 1 2 y l yd l 2 0,Ω + α 2 u l 2 0,Ω, over (y l,u l ) V l W l, subject to a(y l,v l ) = (u l,v l ) 0,Ω, v l V l, u l K l := {w l W l w l T ψ l T, T T l (Ω)}. where ψ l W l is the discrete control constraint. 1
101 Department of Mathematics, University of Houston Optimality Conditions for the FE Discretized Control Problem There exists an adjoint state p l V l and an adjoint control σ l W l such that the quadruple (y l,u l,p l, σ l ) satisfies a(y l,v l ) = (u l,v l ) 0,Ω, v l V l, a(p l,v l ) = (y d l y,v l ) 0,Ω, v l V l, α u l = M l p l σ l, σ l 0, u l ψ l, (σ l,u l ψ l ) 0,Ω = 0, where y d l V l and M l : V l W l, e.g., for k 2 = 0: (M l v l ) T := T 1 v l dx, T T l (Ω). T 1
102 Primal-Dual Weighted Error Representation (Control Constraints) Theorem. Let (x, σ) X L 2 (Ω) and (x l, σ l ) X l W l be the solutions of the continuous and discrete optimality systems, respectively. Then, there holds J(y,u) J l (y l,u l ) = 1 2 xxl(x l x,x l x) + (σ,u l ψ) 0,Ω + osc(1) l. Remark: In the unconstrained case, i.e., σ = σ l = 0, the above result reduces to the error representation in [Becker, Kapp, and Rannacher (2000)].
103 Primal-Dual Weighted Error Representation (Control Constraints) Theorem. Under the assumptions of the previous Theorem let i z l,z {y,u,p}, be the interpolation operators introduced before. Then, there holds ) J(y,u) J l (y l,u l ) = (r(i y l y y) + r(ip l p p) + r(iu l u u) + µ l (x, σ) + osc (1) l + osc (2) l, where r(i y l y y), r(ip l p p) and r(iu l u u) stand for the primal-dual weighted residuals r(i y l y y) := 1 ( ) (y 2 l y l d,iy l y y) 0,Ω + ( (i y l y y), p l ) 0,Ω, r(i p l p p) := 1 ( ) ( (i p 2 l p p), y l ) 0,Ω (u l,i p l p p) 0,Ω, r(i u l u u) := 1 2 (M l p l p l,iu l u u) 0,Ω. Moreover, µ l (x, σ) represents the primal-dual mismatch in complementarity µ l (x, σ) := 1 ( ) (σ,u 2 l ψ) 0,Ω + (σ l, ψ l u) 0,Ω, and osc (2) l is a further oscillation term osc (2) := osc (2) l T, osc (2) T := 1 2 (yd y l d,y l y) 0,T. T T l (Ω)
104 Primal-Dual Weighted Residuals (Control Constraints) Theorem. The primal-dual residuals can be estimated according to r(i y l y y) C ω y T ρy T, r(i p l p p) C ( ) ω p T ρp,1 T + ω u Tρ p,2 T. T T l (Ω) T T l (Ω) Here, ρ y T and ρp,1 T are L2 -norms of ( the residuals associated with the ) state and the adjoint state 1/2 ρ y T := u l 2 0,T + h 1 T 1 2 ν [ y l ] 2 0, T, ( ) 1/2 ρ p,1 T := y l y l d 2 0,T + h 1 T 1 2 ν [ p l ] 2 0, T. The corresponding dual weights ω u T and ωp T are given by ( ) 1/2 ω y T := i p l p p 2 0,T + h T i p l p p 2 0, T, ( ) 1/2 ω p T := i y l y y 2 0,T + h T i y l y y 2 0, T. The residual ρ p,2 T and its dual weight ωu T are given by ρ p,2 T := M l p l p l 0,T, ω u T := i u l u u 0,T.
105 Primal-Dual Mismatch in Complementarity (Control Constraints) Using the complementarity conditions u ψ, σ 0, (σ,u ψ) 0,Ω = 0, αu p + σ = 0, u l ψ l, σ l 0, (σ l,u l ψ l ) 0,Ω = 0, αu l M l p l + σ l = 0, the primal-dual mismatch µ l := µ l (x, σ) can be further assessed according to µ l (I I l ) = 0, µ l (A A l ) = 1 2 (σ + σ l, ψ l ψ) 0,A A l, µ l (I A l ) = 1 2 (σ l, ψ l α 1 p) 0,I Al, µ l (A I l ) = α 2 u u l 2 0,I A l (p M l p l,u l u) 0,I A l. and we finally obtain µ l (I A l ) + µ l (A I l ) ν l with a fully computable a posteriori term ν l (consistency error).
106 Numerical Results: Distributed Control Problem with Control Constraints I Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u 2 0,Ω over (y,u) H 1 0(Ω) L 2 (Ω) subject to y = u in Ω, u K := {v L 2 (Ω) v ψ a.e. in Ω} Data: Ω := (0,1) 2, { y d 200 x := 1 x 2 (x 1 0.5) 2 (1 x 2 ), 0 x (x 1 1) (x 2 (x 1 0.5) 2 (1 x 2 ), 0.5 < x 1 1, α = 0.01, ψ = 1.
 and optimal control")
107 Numerical Results: Distributed Control Problem with Control Constraints I Optimal state (left) and optimal control (right)
108 Numerical Results: Distributed Control Problem with Control Constraints I Grid after 6 (left) and 10 (right) refinement steps
109 Numerical Results: Distributed Control Problem with Control Constraints I l N dof δ h η h osc h ν h E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E-09 Error (quantity of interest), estimator, oscillations, and consistency error
110 Numerical Results: Distributed Control Problem with Control Constraints II Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u ud 2 0,Ω over (y,u) H 1 0(Ω) L 2 (Ω) subject to y = f + u in Ω, u K := {v L 2 (Ω) v ψ a.e. in Ω} Data: Ω := (0,1) 2, y d := 0, u d := û + α 1 (ˆσ 2 û), { (x1 0.5) ψ := 8, (x 1,x 2 ) Ω 1, (x 1 0.5) 2, α := 0.1, f := 0, otherwise { { ψ, (x û := 1,x 2 ) Ω 1 Ω 2, 2.25 (x1 0.75) 10, ˆσ := 4, (x 1,x 2 ) Ω 2, 1.01 ψ, otherwise 0, otherwise ( ) 1/2 Ω 1 := {(x 1,x 2 ) Ω (x 1 0.5) 2 + (x 2 0.5) }, Ω2 := {(x 1,x 2 ) Ω x }.,

 and optimal control")
111 Numerical Results: Distributed Control Problem with Control Constraints II Optimal state (left) and optimal control (right)
112 Numerical Results: Distributed Control Problem with Control Constraints II Grid after 6 (left) and 10 (right) refinement steps
113 Numerical Results: Distributed Control Problem with Control Constraints I l N dof δ h η h osc h ν h E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E-16 Error (quantity of interest), estimator, oscillations, and consistency error
114 Numerical Results: Distributed Control Problem with Control Constraints II Decrease in the quantity of interest versus total number of DOFs
115 Department of Mathematics, University of Houston Elliptic Optimal Control Problems Constraints on the Gradient of the State
116 Elliptic Optimal Control with Pointwise Gradient-State Constraints Let Ω R 2 be a bounded polygonal domain with boundary Γ, y d L 2 (Ω) a desired state, f a forcing term, ψ L 2 (Ω) s.th. ψ ψ min > 0 a.e. in Ω, and α > 0, find (y,u) H 1 0(Ω) L 2 (Ω) such that (P) inf J(y,u) := 1 y y d 2 dx + α u 2 dx, (y,u) 2 2 subject to Ly := a y + cy = f + u in Ω, y = 0 on Γ, y K := {v L 2 (Ω) 2 v ψ a.e. in Ω}. Ω Ω
117 Pointwise Gradient-State Constraints: State-Reduced Formulation Let ˆV H 1 0(Ω) be a reflexive Banach space and let Ĝ : L 2 (Ω) ˆV be the map that assigns to the rhs f + u the solution y = Ĝ(f + u) of the state equation. Assume that Ĝ is a bounded linear operator which is invertible such that u = Ĝ 1 y f. This leads to the state-reduced formulation: Find y ˆK := {v ˆV v ψ bf a.e. in Ω} such that inf J red (y) := 1 2 y ˆK Unconstrained formulation: Ω y y d 2 dx + α 2 inf J red (y) + IˆK (y) y ˆV where IˆK stands for the indicator function of the set ˆK. Ω Ĝ 1 y f 2 dx.
118 State-Reduced Formulation: Optimality Conditions Theorem. The gradient-state constrained optimal control problem admits a unique solution (y,u) ˆK L 2 (Ω) which is characterized by the existence of a unique pair (p,w) L 2 (Ω) ˆV satisfying Lp = (a p) + cp = y d y w in ˆV, p = αu in L 2 (Ω), w NˆK (y) := {ξ ˆV ξ,z y ˆV,ˆV 0, z ˆK}. Remark. If ˆV = W 2,r (Ω) H 1 0(Ω),r > 2, there exists a Slater point, i.e., y 0 int ˆK and (y 0 + v) ψ in Ω for all v C 1 ( Ω) s.th. v C 1 ( Ω) δ for sufficiently small δ > 0. 0 J red(y) + (IˆK )(y) = J red(y) IˆK ( y), i.e., there exists µ IˆK ( y) M( Ω) 2 such that w = µ.
119 Control-Reduced Formulation and Dual Problem Denoting by G : H 1 (Ω) H 1 0(Ω) the solution operator associated with the state equation, the optimal control problem can be written according to where inf F(u) + G(Λu) u L 2 (Ω) F(u) := J(G(f + u),u), G(q) := I K (q), Λ := G. Denoting by F and G the Fenchel conjugates of F and G F (u ) = 1 2 u + G y d + αf 2 M 1, G (q ) = ψ q dx, where M := G G + αi and 2 := (M 1, ) M 1 0,Ω, the dual problem reads as follows: (D) sup F (Λ q ) G ( q 1 ) inf 2 G ( µ + y d ) + αf 2 M 1 + ψ µ dx. q L 2 (Ω) µ L 2 (Ω) Ω Ω
120 Department of Mathematics, University of Houston Tightened Formulation of the Primal Problem Consider the following tightened formulation of the primal problem (ˆP) inf J(y,u) := 1 y y d 2 dx + α u 2 dx, (y,u) ˆV L 2 (Ω) 2 2 subject to Ω Ω Ly = f + u in Ω, y = 0 on Γ, y ψ a.e. in Ω. Theorem. Let {µ n } N L 2 (Ω) 2 be a minimizing sequence for the dual (ˆD) to (ˆP). Then, there exist a subsequence {µ n } N and µ M( Ω) 2 such that w lim µ n = µ in M( Ω) 2 and w lim µ n = w in ˆV. Moreover, the limit w ˆV satisfies ( ) Ly = f + u in L 2 (Ω), Lp = y d y w in ˆV, p = αu in L 2 (Ω). Remark. A quadruple (y,u,p,w) V L 2 (Ω) L 2 (Ω) ˆV such that ( ) holds true and y (M( Ω) 2 ) \ C( Ω) 2, is called a weak solution of (P).
121 Finite Element Discretization of (P) and (ˆP) Let T h (Ω) be a simplicial triangulation of Ω and denote by E h (D) the set of edges of T h (Ω) in D Ω. We refer to V h := {v h C 0 (Ω) v h T P 1 (T),T T h (Ω)} as the finite element space of P1 conforming FEs w.r.t. T h (Ω) and set W h := {w h : Ω R 2 w h T P 0 (T) 2,T T h (Ω)}. We define ψ h according to ψ h T := T 1 T ψdx,t T h(ω) and set K h := {z h W h z h T ψ h T, T T h (Ω)}. The discrete optimal control problems reads: (ˆP h ) inf J(y h,u h ) := 1 y h y d 2 dx + α (y h,u h ) 2 2 Ω Ω u h 2 dx, subject to a(y h,v h ) = (f + u h,v h ) 0,Ω, v h V h, y h K h.
122 Discrete Optimal Control Problem: Optimality Conditions Theorem. The discrete optimal control problem (ˆP h ) admits a unique solution (y h,u h ) V h V h which is characterized by the existence of an adjoint state p h V h and a multiplier µ h W h such that a(p h,v h ) (y d y h,v h ) 0,Ω + (µ h T, v h T ) 0,T = 0, v h V h, T T h (Ω) T T h (Ω) p h αu h = 0, (µ h T,q h T y h T ) 0,T 0, q h K h. Remark. The Fenchel dual associated with (ˆP h ) reads 1 (ˆD h ) inf 2 G h( µ h + y d ) + αf 2 M 1 + h µ h W h Ω ψ h µ h dx.
123 Prager-Synge Equilibration (cf. Braess/Schöberl (08), Braess/H./Schöberl (09)) Construct µ h RT 0 (Ω; T h (Ω)) such that σ i,j,r σ i,j,l (µ h T, v h T ) 0,T = (n E [µ h ] E,v h ) 0,E σ i,j+1,r σ i,j+1,l T T h (Ω) = T T h (Ω) E E h (Ω) ( µ h,v h ) 0,T, v h V h. Then the discrete optimality system can be written according to a(p h,v h ) (y d y h,v h ) 0,Ω ( µ h, v h ) 0,T = 0, v h V h, T T h (Ω) T T h (Ω) p h αu h = 0, (µ h T,q h T y h T ) 0,T 0, q h K h.
124 Residual-Type A Posteriori Error Estimator We choose ˆV = W 1,r 0 (Ω),r > 2, such that ˆV = W 1,s (Ω),1/r + 1/s = 1. The associated residual-type a posteriori error estimator reads ( ) 1/r ( ) 1/r ( ) 1/s ( η h := T T h (Ω) η r y,t E E h (Ω) η r y,e T T h (Ω) η s p,t E E h (Ω) η s p,e) 1/s, where the element residuals η y,t, η p,t and the edge residuals η y,e, η p,e are given by η r y,t := h r T f + u h + (a y h ) cy h r 0,T, η s p,t := h s T y d y h + (a p h ) cp h + µ h s 0,T, η r y,e := h r/2 E n E [a y h ] E r 0,E, η s p,e := h s/2 E n E [a p h ] E s 0,E.
125 Reliability of the A Posteriori Error Estimator Theorem. Let (y,u,p,w) W 1,r 0 L2 (Ω) W 1,s 0 (Ω) W 1,s (Ω) and (y h,u h,p h,w h ) V h V h V h W h be the solution of (ˆP) and (ˆP h ), respectively. Let further η be the residual error estimator. Then, there holds y y h 2 W 1,r 0 + u u h 2 0,Ω η 2 + w,y y h W 1,s (Ω),W 1,r 0 (Ω).
126 Gradient-State Constraints: Numerical Examples We choose Ω := {(r,ϕ) r (0,1),ϕ (0, ω)} with boundaries Γ 1 := [0,1] {0} {(rcosω,rsinω) r [0,1]}. and Γ 2 := {(cosϕ,sinϕ) ϕ (0,ω)}. We further choose y d := r π/ω sin(πϕ/ω), ψ L q (Ω) for some q > 2 and α = 1 as well as a = 1,c = 0 and f = 0. Remark. The state satisfies y W 1,r (Ω) with r := 2ω ω π. Ex. 1: ω = 5 4 π, r = 10, ψ(x) := 2 x 1/5 + x 1.9 (ψ L 10 (Ω)). Ex. 2: ω = 3 2 π, r = 6, ψ(x) := 0.1 x 1/ (ψ L 6 (Ω))..

, state y h (m.")
127 Department of Mathematics, University of Houston Gradient-State Constraints: Numerical Example I Computed optimal control u h (l.), state y h (m.), and y h T (r.)
128 Gradient-State Constraints: Numerical Example I Adaptively refined meshes with #N h (Ω) = 4020 (l.) and #N h (Ω) = 9088 (r.)
129 Department of Mathematics, University of Houston Gradient-State Constraints: Numerical Examples I/II Θ = 0.6 uniform Θ = 0.6 uniform logn DOF logn DOF Convergence history: Example 1 (l.) and Example 2 (r.)


, state y h (m.")
130 Department of Mathematics, University of Houston Gradient-State Constraints: Numerical Example II Computed optimal control u h (l.), state y h (m.), and y h T (r.)
Basic Concepts of Adaptive Finite Element Methods for Elliptic Boundary Value Problems
 Basic Concepts of Adaptive Finite lement Methods for lliptic Boundary Value Problems Ronald H.W. Hoppe 1,2 1 Department of Mathematics, University of Houston 2 Institute of Mathematics, University of Augsburg
Basic Concepts of Adaptive Finite lement Methods for lliptic Boundary Value Problems Ronald H.W. Hoppe 1,2 1 Department of Mathematics, University of Houston 2 Institute of Mathematics, University of Augsburg
Adaptive Finite Element Methods for Elliptic Optimal Control Problems
 Adaptive Finite Element Methods for Elliptic Optimal Control Problems Ronald H.W. Hoppe 1,2 1 2 Institute of Mathematics, University of Augsburg Summer School Optimal Control of PDEs Cortona, July 12-17,
Adaptive Finite Element Methods for Elliptic Optimal Control Problems Ronald H.W. Hoppe 1,2 1 2 Institute of Mathematics, University of Augsburg Summer School Optimal Control of PDEs Cortona, July 12-17,
Numerical Solution of Elliptic Optimal Control Problems
 Department of Mathematics, University of Houston Numerical Solution of Elliptic Optimal Control Problems Ronald H.W. Hoppe 1,2 1 Department of Mathematics, University of Houston 2 Institute of Mathematics,
Department of Mathematics, University of Houston Numerical Solution of Elliptic Optimal Control Problems Ronald H.W. Hoppe 1,2 1 Department of Mathematics, University of Houston 2 Institute of Mathematics,
Chapter 6 A posteriori error estimates for finite element approximations 6.1 Introduction
 Chapter 6 A posteriori error estimates for finite element approximations 6.1 Introduction The a posteriori error estimation of finite element approximations of elliptic boundary value problems has reached
Chapter 6 A posteriori error estimates for finite element approximations 6.1 Introduction The a posteriori error estimation of finite element approximations of elliptic boundary value problems has reached
A POSTERIORI ERROR ESTIMATION OF FINITE ELEMENT APPROXIMATIONS OF POINTWISE STATE CONSTRAINED DISTRIBUTED CONTROL PROBLEMS
 A POSTERIORI ERROR ESTIMATION OF FINITE ELEMENT APPROXIMATIONS OF POINTWISE STATE CONSTRAINED DISTRIBUTED CONTROL PROBLEMS RONALD H.W. HOPPE AND MICHAEL KIEWEG Abstract. We provide an a posteriori error
A POSTERIORI ERROR ESTIMATION OF FINITE ELEMENT APPROXIMATIONS OF POINTWISE STATE CONSTRAINED DISTRIBUTED CONTROL PROBLEMS RONALD H.W. HOPPE AND MICHAEL KIEWEG Abstract. We provide an a posteriori error
Chapter 3 Conforming Finite Element Methods 3.1 Foundations Ritz-Galerkin Method
 Chapter 3 Conforming Finite Element Methods 3.1 Foundations 3.1.1 Ritz-Galerkin Method Let V be a Hilbert space, a(, ) : V V lr a bounded, V-elliptic bilinear form and l : V lr a bounded linear functional.
Chapter 3 Conforming Finite Element Methods 3.1 Foundations 3.1.1 Ritz-Galerkin Method Let V be a Hilbert space, a(, ) : V V lr a bounded, V-elliptic bilinear form and l : V lr a bounded linear functional.
Hamburger Beiträge zur Angewandten Mathematik
 Hamburger Beiträge zur Angewandten Mathematik Numerical analysis of a control and state constrained elliptic control problem with piecewise constant control approximations Klaus Deckelnick and Michael
Hamburger Beiträge zur Angewandten Mathematik Numerical analysis of a control and state constrained elliptic control problem with piecewise constant control approximations Klaus Deckelnick and Michael
Chapter 5 A priori error estimates for nonconforming finite element approximations 5.1 Strang s first lemma
 Chapter 5 A priori error estimates for nonconforming finite element approximations 51 Strang s first lemma We consider the variational equation (51 a(u, v = l(v, v V H 1 (Ω, and assume that the conditions
Chapter 5 A priori error estimates for nonconforming finite element approximations 51 Strang s first lemma We consider the variational equation (51 a(u, v = l(v, v V H 1 (Ω, and assume that the conditions
Numerical Solutions to Partial Differential Equations
 Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University The Residual and Error of Finite Element Solutions Mixed BVP of Poisson Equation
Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University The Residual and Error of Finite Element Solutions Mixed BVP of Poisson Equation
Adaptive methods for control problems with finite-dimensional control space
 Adaptive methods for control problems with finite-dimensional control space Saheed Akindeinde and Daniel Wachsmuth Johann Radon Institute for Computational and Applied Mathematics (RICAM) Austrian Academy
Adaptive methods for control problems with finite-dimensional control space Saheed Akindeinde and Daniel Wachsmuth Johann Radon Institute for Computational and Applied Mathematics (RICAM) Austrian Academy
Chapter 1 Foundations of Elliptic Boundary Value Problems 1.1 Euler equations of variational problems
 Chapter 1 Foundations of Elliptic Boundary Value Problems 1.1 Euler equations of variational problems Elliptic boundary value problems often occur as the Euler equations of variational problems the latter
Chapter 1 Foundations of Elliptic Boundary Value Problems 1.1 Euler equations of variational problems Elliptic boundary value problems often occur as the Euler equations of variational problems the latter
SUPERCONVERGENCE PROPERTIES FOR OPTIMAL CONTROL PROBLEMS DISCRETIZED BY PIECEWISE LINEAR AND DISCONTINUOUS FUNCTIONS
 SUPERCONVERGENCE PROPERTIES FOR OPTIMAL CONTROL PROBLEMS DISCRETIZED BY PIECEWISE LINEAR AND DISCONTINUOUS FUNCTIONS A. RÖSCH AND R. SIMON Abstract. An optimal control problem for an elliptic equation
SUPERCONVERGENCE PROPERTIES FOR OPTIMAL CONTROL PROBLEMS DISCRETIZED BY PIECEWISE LINEAR AND DISCONTINUOUS FUNCTIONS A. RÖSCH AND R. SIMON Abstract. An optimal control problem for an elliptic equation
Numerical Solutions to Partial Differential Equations
 Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University Nonconformity and the Consistency Error First Strang Lemma Abstract Error Estimate
Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University Nonconformity and the Consistency Error First Strang Lemma Abstract Error Estimate
LECTURE 1: SOURCES OF ERRORS MATHEMATICAL TOOLS A PRIORI ERROR ESTIMATES. Sergey Korotov,
 LECTURE 1: SOURCES OF ERRORS MATHEMATICAL TOOLS A PRIORI ERROR ESTIMATES Sergey Korotov, Institute of Mathematics Helsinki University of Technology, Finland Academy of Finland 1 Main Problem in Mathematical
LECTURE 1: SOURCES OF ERRORS MATHEMATICAL TOOLS A PRIORI ERROR ESTIMATES Sergey Korotov, Institute of Mathematics Helsinki University of Technology, Finland Academy of Finland 1 Main Problem in Mathematical
A Posteriori Estimates for Cost Functionals of Optimal Control Problems
 A Posteriori Estimates for Cost Functionals of Optimal Control Problems Alexandra Gaevskaya, Ronald H.W. Hoppe,2 and Sergey Repin 3 Institute of Mathematics, Universität Augsburg, D-8659 Augsburg, Germany
A Posteriori Estimates for Cost Functionals of Optimal Control Problems Alexandra Gaevskaya, Ronald H.W. Hoppe,2 and Sergey Repin 3 Institute of Mathematics, Universität Augsburg, D-8659 Augsburg, Germany
Hamburger Beiträge zur Angewandten Mathematik
 Hamburger Beiträge zur Angewandten Mathematik A finite element approximation to elliptic control problems in the presence of control and state constraints Klaus Deckelnick and Michael Hinze Nr. 2007-0
Hamburger Beiträge zur Angewandten Mathematik A finite element approximation to elliptic control problems in the presence of control and state constraints Klaus Deckelnick and Michael Hinze Nr. 2007-0
Institut für Mathematik
 U n i v e r s i t ä t A u g s b u r g Institut für Mathematik Dietrich Braess, Carsten Carstensen, and Ronald H.W. Hoppe Convergence Analysis of a Conforming Adaptive Finite Element Method for an Obstacle
U n i v e r s i t ä t A u g s b u r g Institut für Mathematik Dietrich Braess, Carsten Carstensen, and Ronald H.W. Hoppe Convergence Analysis of a Conforming Adaptive Finite Element Method for an Obstacle
Convergence of a finite element approximation to a state constrained elliptic control problem
 Als Manuskript gedruckt Technische Universität Dresden Herausgeber: Der Rektor Convergence of a finite element approximation to a state constrained elliptic control problem Klaus Deckelnick & Michael Hinze
Als Manuskript gedruckt Technische Universität Dresden Herausgeber: Der Rektor Convergence of a finite element approximation to a state constrained elliptic control problem Klaus Deckelnick & Michael Hinze
Scientific Computing WS 2018/2019. Lecture 15. Jürgen Fuhrmann Lecture 15 Slide 1
 Scientific Computing WS 2018/2019 Lecture 15 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 15 Slide 1 Lecture 15 Slide 2 Problems with strong formulation Writing the PDE with divergence and gradient
Scientific Computing WS 2018/2019 Lecture 15 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 15 Slide 1 Lecture 15 Slide 2 Problems with strong formulation Writing the PDE with divergence and gradient
Chapter 1: The Finite Element Method
 Chapter 1: The Finite Element Method Michael Hanke Read: Strang, p 428 436 A Model Problem Mathematical Models, Analysis and Simulation, Part Applications: u = fx), < x < 1 u) = u1) = D) axial deformation
Chapter 1: The Finite Element Method Michael Hanke Read: Strang, p 428 436 A Model Problem Mathematical Models, Analysis and Simulation, Part Applications: u = fx), < x < 1 u) = u1) = D) axial deformation
A-posteriori error estimates for optimal control problems with state and control constraints
 www.oeaw.ac.at A-posteriori error estimates for optimal control problems with state and control constraints A. Rösch, D. Wachsmuth RICAM-Report 2010-08 www.ricam.oeaw.ac.at A-POSTERIORI ERROR ESTIMATES
www.oeaw.ac.at A-posteriori error estimates for optimal control problems with state and control constraints A. Rösch, D. Wachsmuth RICAM-Report 2010-08 www.ricam.oeaw.ac.at A-POSTERIORI ERROR ESTIMATES
Scientific Computing WS 2017/2018. Lecture 18. Jürgen Fuhrmann Lecture 18 Slide 1
 Scientific Computing WS 2017/2018 Lecture 18 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 18 Slide 1 Lecture 18 Slide 2 Weak formulation of homogeneous Dirichlet problem Search u H0 1 (Ω) (here,
Scientific Computing WS 2017/2018 Lecture 18 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 18 Slide 1 Lecture 18 Slide 2 Weak formulation of homogeneous Dirichlet problem Search u H0 1 (Ω) (here,
Variational Formulations
 Chapter 2 Variational Formulations In this chapter we will derive a variational (or weak) formulation of the elliptic boundary value problem (1.4). We will discuss all fundamental theoretical results that
Chapter 2 Variational Formulations In this chapter we will derive a variational (or weak) formulation of the elliptic boundary value problem (1.4). We will discuss all fundamental theoretical results that
R T (u H )v + (2.1) J S (u H )v v V, T (2.2) (2.3) H S J S (u H ) 2 L 2 (S). S T
v + (2.1) J S (u H )v v V, T (2.2) (2.3) H S J S (u H ) 2 L 2 (S). S T") 2 R.H. NOCHETTO 2. Lecture 2. Adaptivity I: Design and Convergence of AFEM tarting with a conforming mesh T H, the adaptive procedure AFEM consists of loops of the form OLVE ETIMATE MARK REFINE to produce
2 R.H. NOCHETTO 2. Lecture 2. Adaptivity I: Design and Convergence of AFEM tarting with a conforming mesh T H, the adaptive procedure AFEM consists of loops of the form OLVE ETIMATE MARK REFINE to produce
Adaptive Finite Element Methods Lecture 1: A Posteriori Error Estimation
 Adaptive Finite Element Methods Lecture 1: A Posteriori Error Estimation Department of Mathematics and Institute for Physical Science and Technology University of Maryland, USA www.math.umd.edu/ rhn 7th
Adaptive Finite Element Methods Lecture 1: A Posteriori Error Estimation Department of Mathematics and Institute for Physical Science and Technology University of Maryland, USA www.math.umd.edu/ rhn 7th
WELL POSEDNESS OF PROBLEMS I
 Finite Element Method 85 WELL POSEDNESS OF PROBLEMS I Consider the following generic problem Lu = f, where L : X Y, u X, f Y and X, Y are two Banach spaces We say that the above problem is well-posed (according
Finite Element Method 85 WELL POSEDNESS OF PROBLEMS I Consider the following generic problem Lu = f, where L : X Y, u X, f Y and X, Y are two Banach spaces We say that the above problem is well-posed (according
ADAPTIVE MULTILEVEL CORRECTION METHOD FOR FINITE ELEMENT APPROXIMATIONS OF ELLIPTIC OPTIMAL CONTROL PROBLEMS
 ADAPTIVE MULTILEVEL CORRECTION METHOD FOR FINITE ELEMENT APPROXIMATIONS OF ELLIPTIC OPTIMAL CONTROL PROBLEMS WEI GONG, HEHU XIE, AND NINGNING YAN Abstract: In this paper we propose an adaptive multilevel
ADAPTIVE MULTILEVEL CORRECTION METHOD FOR FINITE ELEMENT APPROXIMATIONS OF ELLIPTIC OPTIMAL CONTROL PROBLEMS WEI GONG, HEHU XIE, AND NINGNING YAN Abstract: In this paper we propose an adaptive multilevel
Key words. optimal control, heat equation, control constraints, state constraints, finite elements, a priori error estimates
 A PRIORI ERROR ESTIMATES FOR FINITE ELEMENT DISCRETIZATIONS OF PARABOLIC OPTIMIZATION PROBLEMS WITH POINTWISE STATE CONSTRAINTS IN TIME DOMINIK MEIDNER, ROLF RANNACHER, AND BORIS VEXLER Abstract. In this
A PRIORI ERROR ESTIMATES FOR FINITE ELEMENT DISCRETIZATIONS OF PARABOLIC OPTIMIZATION PROBLEMS WITH POINTWISE STATE CONSTRAINTS IN TIME DOMINIK MEIDNER, ROLF RANNACHER, AND BORIS VEXLER Abstract. In this
i=1 α i. Given an m-times continuously
 1 Fundamentals 1.1 Classification and characteristics Let Ω R d, d N, d 2, be an open set and α = (α 1,, α d ) T N d 0, N 0 := N {0}, a multiindex with α := d i=1 α i. Given an m-times continuously differentiable
1 Fundamentals 1.1 Classification and characteristics Let Ω R d, d N, d 2, be an open set and α = (α 1,, α d ) T N d 0, N 0 := N {0}, a multiindex with α := d i=1 α i. Given an m-times continuously differentiable
Convergence and optimality of an adaptive FEM for controlling L 2 errors
 Convergence and optimality of an adaptive FEM for controlling L 2 errors Alan Demlow (University of Kentucky) joint work with Rob Stevenson (University of Amsterdam) Partially supported by NSF DMS-0713770.
Convergence and optimality of an adaptive FEM for controlling L 2 errors Alan Demlow (University of Kentucky) joint work with Rob Stevenson (University of Amsterdam) Partially supported by NSF DMS-0713770.
INTRODUCTION TO FINITE ELEMENT METHODS
 INTRODUCTION TO FINITE ELEMENT METHODS LONG CHEN Finite element methods are based on the variational formulation of partial differential equations which only need to compute the gradient of a function.
INTRODUCTION TO FINITE ELEMENT METHODS LONG CHEN Finite element methods are based on the variational formulation of partial differential equations which only need to compute the gradient of a function.
Robust error estimates for regularization and discretization of bang-bang control problems
 Robust error estimates for regularization and discretization of bang-bang control problems Daniel Wachsmuth September 2, 205 Abstract We investigate the simultaneous regularization and discretization of
Robust error estimates for regularization and discretization of bang-bang control problems Daniel Wachsmuth September 2, 205 Abstract We investigate the simultaneous regularization and discretization of
Institut für Mathematik
 U n i v e r s i t ä t A u g s b u r g Institut für Matematik Micael Hintermüller, Ronald H.W. Hoppe Goal-Oriented Adaptivity in Pointwise State Constrained Optimal Control of Partial Differential Equations
U n i v e r s i t ä t A u g s b u r g Institut für Matematik Micael Hintermüller, Ronald H.W. Hoppe Goal-Oriented Adaptivity in Pointwise State Constrained Optimal Control of Partial Differential Equations
Numerical Solution I
 Numerical Solution I Stationary Flow R. Kornhuber (FU Berlin) Summerschool Modelling of mass and energy transport in porous media with practical applications October 8-12, 2018 Schedule Classical Solutions
Numerical Solution I Stationary Flow R. Kornhuber (FU Berlin) Summerschool Modelling of mass and energy transport in porous media with practical applications October 8-12, 2018 Schedule Classical Solutions
Finite Elements. Colin Cotter. February 22, Colin Cotter FEM
 Finite Elements February 22, 2019 In the previous sections, we introduced the concept of finite element spaces, which contain certain functions defined on a domain. Finite element spaces are examples of
Finite Elements February 22, 2019 In the previous sections, we introduced the concept of finite element spaces, which contain certain functions defined on a domain. Finite element spaces are examples of
A posteriori error estimation for elliptic problems
 A posteriori error estimation for elliptic problems Praveen. C praveen@math.tifrbng.res.in Tata Institute of Fundamental Research Center for Applicable Mathematics Bangalore 560065 http://math.tifrbng.res.in
A posteriori error estimation for elliptic problems Praveen. C praveen@math.tifrbng.res.in Tata Institute of Fundamental Research Center for Applicable Mathematics Bangalore 560065 http://math.tifrbng.res.in
Axioms of Adaptivity (AoA) in Lecture 3 (sufficient for optimal convergence rates)
 in Lecture 3 (sufficient for optimal convergence rates)") Axioms of Adaptivity (AoA) in Lecture 3 (sufficient for optimal convergence rates) Carsten Carstensen Humboldt-Universität zu Berlin 2018 International Graduate Summer School on Frontiers of Applied and
Axioms of Adaptivity (AoA) in Lecture 3 (sufficient for optimal convergence rates) Carsten Carstensen Humboldt-Universität zu Berlin 2018 International Graduate Summer School on Frontiers of Applied and
Graded Mesh Refinement and Error Estimates of Higher Order for DGFE-solutions of Elliptic Boundary Value Problems in Polygons
 Graded Mesh Refinement and Error Estimates of Higher Order for DGFE-solutions of Elliptic Boundary Value Problems in Polygons Anna-Margarete Sändig, Miloslav Feistauer University Stuttgart, IANS Journées
Graded Mesh Refinement and Error Estimates of Higher Order for DGFE-solutions of Elliptic Boundary Value Problems in Polygons Anna-Margarete Sändig, Miloslav Feistauer University Stuttgart, IANS Journées
Numerical Solutions to Partial Differential Equations
 Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University Sobolev Embedding Theorems Embedding Operators and the Sobolev Embedding Theorem
Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University Sobolev Embedding Theorems Embedding Operators and the Sobolev Embedding Theorem
A Priori Error Analysis for Space-Time Finite Element Discretization of Parabolic Optimal Control Problems
 A Priori Error Analysis for Space-Time Finite Element Discretization of Parabolic Optimal Control Problems D. Meidner and B. Vexler Abstract In this article we discuss a priori error estimates for Galerkin
A Priori Error Analysis for Space-Time Finite Element Discretization of Parabolic Optimal Control Problems D. Meidner and B. Vexler Abstract In this article we discuss a priori error estimates for Galerkin
The Mortar Boundary Element Method
 The Mortar Boundary Element Method A Thesis submitted for the degree of Doctor of Philosophy by Martin Healey School of Information Systems, Computing and Mathematics Brunel University March 2010 Abstract
The Mortar Boundary Element Method A Thesis submitted for the degree of Doctor of Philosophy by Martin Healey School of Information Systems, Computing and Mathematics Brunel University March 2010 Abstract
Numerical Methods for Large-Scale Nonlinear Systems
 Numerical Methods for Large-Scale Nonlinear Systems Handouts by Ronald H.W. Hoppe following the monograph P. Deuflhard Newton Methods for Nonlinear Problems Springer, Berlin-Heidelberg-New York, 2004 Num.
Numerical Methods for Large-Scale Nonlinear Systems Handouts by Ronald H.W. Hoppe following the monograph P. Deuflhard Newton Methods for Nonlinear Problems Springer, Berlin-Heidelberg-New York, 2004 Num.
K. Krumbiegel I. Neitzel A. Rösch
 SUFFICIENT OPTIMALITY CONDITIONS FOR THE MOREAU-YOSIDA-TYPE REGULARIZATION CONCEPT APPLIED TO SEMILINEAR ELLIPTIC OPTIMAL CONTROL PROBLEMS WITH POINTWISE STATE CONSTRAINTS K. Krumbiegel I. Neitzel A. Rösch
SUFFICIENT OPTIMALITY CONDITIONS FOR THE MOREAU-YOSIDA-TYPE REGULARIZATION CONCEPT APPLIED TO SEMILINEAR ELLIPTIC OPTIMAL CONTROL PROBLEMS WITH POINTWISE STATE CONSTRAINTS K. Krumbiegel I. Neitzel A. Rösch
From Completing the Squares and Orthogonal Projection to Finite Element Methods
 From Completing the Squares and Orthogonal Projection to Finite Element Methods Mo MU Background In scientific computing, it is important to start with an appropriate model in order to design effective
From Completing the Squares and Orthogonal Projection to Finite Element Methods Mo MU Background In scientific computing, it is important to start with an appropriate model in order to design effective
Adaptive Finite Element Methods Lecture Notes Winter Term 2017/18. R. Verfürth. Fakultät für Mathematik, Ruhr-Universität Bochum
 Adaptive Finite Element Methods Lecture Notes Winter Term 2017/18 R. Verfürth Fakultät für Mathematik, Ruhr-Universität Bochum Contents Chapter I. Introduction 7 I.1. Motivation 7 I.2. Sobolev and finite
Adaptive Finite Element Methods Lecture Notes Winter Term 2017/18 R. Verfürth Fakultät für Mathematik, Ruhr-Universität Bochum Contents Chapter I. Introduction 7 I.1. Motivation 7 I.2. Sobolev and finite
2 Elliptic Differential Equations
 2 Elliptic Differential Equations 2.1 Classical solutions As far as existence and uniqueness results for classical solutions are concerned, we restrict ourselves to linear elliptic second order elliptic
2 Elliptic Differential Equations 2.1 Classical solutions As far as existence and uniqueness results for classical solutions are concerned, we restrict ourselves to linear elliptic second order elliptic
Priority Program 1253
 Deutsche Forschungsgemeinschaft Priority Program 1253 Optimization with Partial Differential Equations Klaus Deckelnick and Michael Hinze A note on the approximation of elliptic control problems with bang-bang
Deutsche Forschungsgemeinschaft Priority Program 1253 Optimization with Partial Differential Equations Klaus Deckelnick and Michael Hinze A note on the approximation of elliptic control problems with bang-bang
A very short introduction to the Finite Element Method
 A very short introduction to the Finite Element Method Till Mathis Wagner Technical University of Munich JASS 2004, St Petersburg May 4, 2004 1 Introduction This is a short introduction to the finite element
A very short introduction to the Finite Element Method Till Mathis Wagner Technical University of Munich JASS 2004, St Petersburg May 4, 2004 1 Introduction This is a short introduction to the finite element
A Framework for Analyzing and Constructing Hierarchical-Type A Posteriori Error Estimators
 A Framework for Analyzing and Constructing Hierarchical-Type A Posteriori Error Estimators Jeff Ovall University of Kentucky Mathematics www.math.uky.edu/ jovall jovall@ms.uky.edu Kentucky Applied and
A Framework for Analyzing and Constructing Hierarchical-Type A Posteriori Error Estimators Jeff Ovall University of Kentucky Mathematics www.math.uky.edu/ jovall jovall@ms.uky.edu Kentucky Applied and
Bang bang control of elliptic and parabolic PDEs
 1/26 Bang bang control of elliptic and parabolic PDEs Michael Hinze (joint work with Nikolaus von Daniels & Klaus Deckelnick) Jackson, July 24, 2018 2/26 Model problem (P) min J(y, u) = 1 u U ad,y Y ad
1/26 Bang bang control of elliptic and parabolic PDEs Michael Hinze (joint work with Nikolaus von Daniels & Klaus Deckelnick) Jackson, July 24, 2018 2/26 Model problem (P) min J(y, u) = 1 u U ad,y Y ad
Space-time Finite Element Methods for Parabolic Evolution Problems
 Space-time Finite Element Methods for Parabolic Evolution Problems with Variable Coefficients Ulrich Langer, Martin Neumüller, Andreas Schafelner Johannes Kepler University, Linz Doctoral Program Computational
Space-time Finite Element Methods for Parabolic Evolution Problems with Variable Coefficients Ulrich Langer, Martin Neumüller, Andreas Schafelner Johannes Kepler University, Linz Doctoral Program Computational
QUASI-OPTIMAL CONVERGENCE RATE OF AN ADAPTIVE DISCONTINUOUS GALERKIN METHOD
 QUASI-OPIMAL CONVERGENCE RAE OF AN ADAPIVE DISCONINUOUS GALERKIN MEHOD ANDREA BONIO AND RICARDO H. NOCHEO Abstract. We analyze an adaptive discontinuous finite element method (ADFEM) for symmetric second
QUASI-OPIMAL CONVERGENCE RAE OF AN ADAPIVE DISCONINUOUS GALERKIN MEHOD ANDREA BONIO AND RICARDO H. NOCHEO Abstract. We analyze an adaptive discontinuous finite element method (ADFEM) for symmetric second
OPTIMALITY CONDITIONS AND ERROR ANALYSIS OF SEMILINEAR ELLIPTIC CONTROL PROBLEMS WITH L 1 COST FUNCTIONAL
 OPTIMALITY CONDITIONS AND ERROR ANALYSIS OF SEMILINEAR ELLIPTIC CONTROL PROBLEMS WITH L 1 COST FUNCTIONAL EDUARDO CASAS, ROLAND HERZOG, AND GERD WACHSMUTH Abstract. Semilinear elliptic optimal control
OPTIMALITY CONDITIONS AND ERROR ANALYSIS OF SEMILINEAR ELLIPTIC CONTROL PROBLEMS WITH L 1 COST FUNCTIONAL EDUARDO CASAS, ROLAND HERZOG, AND GERD WACHSMUTH Abstract. Semilinear elliptic optimal control
MEASURE VALUED DIRECTIONAL SPARSITY FOR PARABOLIC OPTIMAL CONTROL PROBLEMS
 MEASURE VALUED DIRECTIONAL SPARSITY FOR PARABOLIC OPTIMAL CONTROL PROBLEMS KARL KUNISCH, KONSTANTIN PIEPER, AND BORIS VEXLER Abstract. A directional sparsity framework allowing for measure valued controls
MEASURE VALUED DIRECTIONAL SPARSITY FOR PARABOLIC OPTIMAL CONTROL PROBLEMS KARL KUNISCH, KONSTANTIN PIEPER, AND BORIS VEXLER Abstract. A directional sparsity framework allowing for measure valued controls
Simple Examples on Rectangular Domains
 84 Chapter 5 Simple Examples on Rectangular Domains In this chapter we consider simple elliptic boundary value problems in rectangular domains in R 2 or R 3 ; our prototype example is the Poisson equation
84 Chapter 5 Simple Examples on Rectangular Domains In this chapter we consider simple elliptic boundary value problems in rectangular domains in R 2 or R 3 ; our prototype example is the Poisson equation
Numerical Analysis of Higher Order Discontinuous Galerkin Finite Element Methods
 Numerical Analysis of Higher Order Discontinuous Galerkin Finite Element Methods Contents Ralf Hartmann Institute of Aerodynamics and Flow Technology DLR (German Aerospace Center) Lilienthalplatz 7, 3808
Numerical Analysis of Higher Order Discontinuous Galerkin Finite Element Methods Contents Ralf Hartmann Institute of Aerodynamics and Flow Technology DLR (German Aerospace Center) Lilienthalplatz 7, 3808
Maximum-norm a posteriori estimates for discontinuous Galerkin methods
 Maximum-norm a posteriori estimates for discontinuous Galerkin methods Emmanuil Georgoulis Department of Mathematics, University of Leicester, UK Based on joint work with Alan Demlow (Kentucky, USA) DG
Maximum-norm a posteriori estimates for discontinuous Galerkin methods Emmanuil Georgoulis Department of Mathematics, University of Leicester, UK Based on joint work with Alan Demlow (Kentucky, USA) DG
An optimal control problem for a parabolic PDE with control constraints
 An optimal control problem for a parabolic PDE with control constraints PhD Summer School on Reduced Basis Methods, Ulm Martin Gubisch University of Konstanz October 7 Martin Gubisch (University of Konstanz)
An optimal control problem for a parabolic PDE with control constraints PhD Summer School on Reduced Basis Methods, Ulm Martin Gubisch University of Konstanz October 7 Martin Gubisch (University of Konstanz)
Preconditioned space-time boundary element methods for the heat equation
 W I S S E N T E C H N I K L E I D E N S C H A F T Preconditioned space-time boundary element methods for the heat equation S. Dohr and O. Steinbach Institut für Numerische Mathematik Space-Time Methods
W I S S E N T E C H N I K L E I D E N S C H A F T Preconditioned space-time boundary element methods for the heat equation S. Dohr and O. Steinbach Institut für Numerische Mathematik Space-Time Methods
Institut für Mathematik
 U n i v e r s i t ä t A u g s b u r g Institut für Mathematik Ronald H.W. Hoppe, Irwin Yousept Adaptive Edge Element Approximation of H(curl-Elliptic Optimal Control Problems with Control Constraints Preprint
U n i v e r s i t ä t A u g s b u r g Institut für Mathematik Ronald H.W. Hoppe, Irwin Yousept Adaptive Edge Element Approximation of H(curl-Elliptic Optimal Control Problems with Control Constraints Preprint
Optimal control of partial differential equations with affine control constraints
 Control and Cybernetics vol. 38 (2009) No. 4A Optimal control of partial differential equations with affine control constraints by Juan Carlos De Los Reyes 1 and Karl Kunisch 2 1 Departmento de Matemática,
Control and Cybernetics vol. 38 (2009) No. 4A Optimal control of partial differential equations with affine control constraints by Juan Carlos De Los Reyes 1 and Karl Kunisch 2 1 Departmento de Matemática,
A POSTERIORI ERROR ESTIMATES OF TRIANGULAR MIXED FINITE ELEMENT METHODS FOR QUADRATIC CONVECTION DIFFUSION OPTIMAL CONTROL PROBLEMS
 A POSTERIORI ERROR ESTIMATES OF TRIANGULAR MIXED FINITE ELEMENT METHODS FOR QUADRATIC CONVECTION DIFFUSION OPTIMAL CONTROL PROBLEMS Z. LU Communicated by Gabriela Marinoschi In this paper, we discuss a
A POSTERIORI ERROR ESTIMATES OF TRIANGULAR MIXED FINITE ELEMENT METHODS FOR QUADRATIC CONVECTION DIFFUSION OPTIMAL CONTROL PROBLEMS Z. LU Communicated by Gabriela Marinoschi In this paper, we discuss a
The Dirichlet-to-Neumann operator
 Lecture 8 The Dirichlet-to-Neumann operator The Dirichlet-to-Neumann operator plays an important role in the theory of inverse problems. In fact, from measurements of electrical currents at the surface
Lecture 8 The Dirichlet-to-Neumann operator The Dirichlet-to-Neumann operator plays an important role in the theory of inverse problems. In fact, from measurements of electrical currents at the surface
PREPRINT 2010:25. Fictitious domain finite element methods using cut elements: II. A stabilized Nitsche method ERIK BURMAN PETER HANSBO
 PREPRINT 2010:25 Fictitious domain finite element methods using cut elements: II. A stabilized Nitsche method ERIK BURMAN PETER HANSBO Department of Mathematical Sciences Division of Mathematics CHALMERS
PREPRINT 2010:25 Fictitious domain finite element methods using cut elements: II. A stabilized Nitsche method ERIK BURMAN PETER HANSBO Department of Mathematical Sciences Division of Mathematics CHALMERS
On Dual-Weighted Residual Error Estimates for p-dependent Discretizations
 On Dual-Weighted Residual Error Estimates for p-dependent Discretizations Aerospace Computational Design Laboratory Report TR-11-1 Masayuki Yano and David L. Darmofal September 21, 2011 Abstract This report
On Dual-Weighted Residual Error Estimates for p-dependent Discretizations Aerospace Computational Design Laboratory Report TR-11-1 Masayuki Yano and David L. Darmofal September 21, 2011 Abstract This report
Adaptive Space-Time Finite Element Approximations of Parabolic Optimal Control Problems. Dissertation
 Adaptive Space-Time Finite Element Approximations of Parabolic Optimal Control Problems Dissertation zur Erlangung des akademischen Titels eines Doktors der Naturwissenschaften der Mathematisch-Naturwissenschaftlichen
Adaptive Space-Time Finite Element Approximations of Parabolic Optimal Control Problems Dissertation zur Erlangung des akademischen Titels eines Doktors der Naturwissenschaften der Mathematisch-Naturwissenschaftlichen
CONVERGENCE THEORY. G. ALLAIRE CMAP, Ecole Polytechnique. 1. Maximum principle. 2. Oscillating test function. 3. Two-scale convergence
 1 CONVERGENCE THEOR G. ALLAIRE CMAP, Ecole Polytechnique 1. Maximum principle 2. Oscillating test function 3. Two-scale convergence 4. Application to homogenization 5. General theory H-convergence) 6.
1 CONVERGENCE THEOR G. ALLAIRE CMAP, Ecole Polytechnique 1. Maximum principle 2. Oscillating test function 3. Two-scale convergence 4. Application to homogenization 5. General theory H-convergence) 6.
PIECEWISE LINEAR FINITE ELEMENT METHODS ARE NOT LOCALIZED
 PIECEWISE LINEAR FINITE ELEMENT METHODS ARE NOT LOCALIZED ALAN DEMLOW Abstract. Recent results of Schatz show that standard Galerkin finite element methods employing piecewise polynomial elements of degree
PIECEWISE LINEAR FINITE ELEMENT METHODS ARE NOT LOCALIZED ALAN DEMLOW Abstract. Recent results of Schatz show that standard Galerkin finite element methods employing piecewise polynomial elements of degree
PART IV Spectral Methods
 PART IV Spectral Methods Additional References: R. Peyret, Spectral methods for incompressible viscous flow, Springer (2002), B. Mercier, An introduction to the numerical analysis of spectral methods,
PART IV Spectral Methods Additional References: R. Peyret, Spectral methods for incompressible viscous flow, Springer (2002), B. Mercier, An introduction to the numerical analysis of spectral methods,
A Finite Element Method Using Singular Functions for Poisson Equations: Mixed Boundary Conditions
 A Finite Element Method Using Singular Functions for Poisson Equations: Mixed Boundary Conditions Zhiqiang Cai Seokchan Kim Sangdong Kim Sooryun Kong Abstract In [7], we proposed a new finite element method
A Finite Element Method Using Singular Functions for Poisson Equations: Mixed Boundary Conditions Zhiqiang Cai Seokchan Kim Sangdong Kim Sooryun Kong Abstract In [7], we proposed a new finite element method
Numerical Methods for Partial Differential Equations
 Numerical Methods for Partial Differential Equations Eric de Sturler University of Illinois at Urbana-Champaign Read section 8. to see where equations of type (au x ) x = f show up and their (exact) solution
Numerical Methods for Partial Differential Equations Eric de Sturler University of Illinois at Urbana-Champaign Read section 8. to see where equations of type (au x ) x = f show up and their (exact) solution
Second Order Elliptic PDE
 Second Order Elliptic PDE T. Muthukumar tmk@iitk.ac.in December 16, 2014 Contents 1 A Quick Introduction to PDE 1 2 Classification of Second Order PDE 3 3 Linear Second Order Elliptic Operators 4 4 Periodic
Second Order Elliptic PDE T. Muthukumar tmk@iitk.ac.in December 16, 2014 Contents 1 A Quick Introduction to PDE 1 2 Classification of Second Order PDE 3 3 Linear Second Order Elliptic Operators 4 4 Periodic
CONVERGENCE ANALYSIS OF AN ADAPTIVE INTERIOR PENALTY DISCONTINUOUS GALERKIN METHOD FOR THE HELMHOLTZ EQUATION
 CONVERGENCE ANALYSIS OF AN ADAPTIVE INTERIOR PENALTY DISCONTINUOUS GALERKIN METHOD FOR THE HELMHOLTZ EQUATION A Dissertation Presented to the Faculty of the Department of Mathematics University of Houston
CONVERGENCE ANALYSIS OF AN ADAPTIVE INTERIOR PENALTY DISCONTINUOUS GALERKIN METHOD FOR THE HELMHOLTZ EQUATION A Dissertation Presented to the Faculty of the Department of Mathematics University of Houston
LECTURE 3: DISCRETE GRADIENT FLOWS
 LECTURE 3: DISCRETE GRADIENT FLOWS Department of Mathematics and Institute for Physical Science and Technology University of Maryland, USA Tutorial: Numerical Methods for FBPs Free Boundary Problems and
LECTURE 3: DISCRETE GRADIENT FLOWS Department of Mathematics and Institute for Physical Science and Technology University of Maryland, USA Tutorial: Numerical Methods for FBPs Free Boundary Problems and
ELLIPTIC RECONSTRUCTION AND A POSTERIORI ERROR ESTIMATES FOR PARABOLIC PROBLEMS
 ELLIPTIC RECONSTRUCTION AND A POSTERIORI ERROR ESTIMATES FOR PARABOLIC PROBLEMS CHARALAMBOS MAKRIDAKIS AND RICARDO H. NOCHETTO Abstract. It is known that the energy technique for a posteriori error analysis
ELLIPTIC RECONSTRUCTION AND A POSTERIORI ERROR ESTIMATES FOR PARABOLIC PROBLEMS CHARALAMBOS MAKRIDAKIS AND RICARDO H. NOCHETTO Abstract. It is known that the energy technique for a posteriori error analysis
Analysis of an Adaptive Finite Element Method for Recovering the Robin Coefficient
 Analysis of an Adaptive Finite Element Method for Recovering the Robin Coefficient Yifeng Xu 1 Jun Zou 2 Abstract Based on a new a posteriori error estimator, an adaptive finite element method is proposed
Analysis of an Adaptive Finite Element Method for Recovering the Robin Coefficient Yifeng Xu 1 Jun Zou 2 Abstract Based on a new a posteriori error estimator, an adaptive finite element method is proposed
Maximum norm estimates for energy-corrected finite element method
 Maximum norm estimates for energy-corrected finite element method Piotr Swierczynski 1 and Barbara Wohlmuth 1 Technical University of Munich, Institute for Numerical Mathematics, piotr.swierczynski@ma.tum.de,
Maximum norm estimates for energy-corrected finite element method Piotr Swierczynski 1 and Barbara Wohlmuth 1 Technical University of Munich, Institute for Numerical Mathematics, piotr.swierczynski@ma.tum.de,
Numerical Analysis of State-Constrained Optimal Control Problems for PDEs
 Numerical Analysis of State-Constrained Optimal Control Problems for PDEs Ira Neitzel and Fredi Tröltzsch Abstract. We survey the results of SPP 1253 project Numerical Analysis of State-Constrained Optimal
Numerical Analysis of State-Constrained Optimal Control Problems for PDEs Ira Neitzel and Fredi Tröltzsch Abstract. We survey the results of SPP 1253 project Numerical Analysis of State-Constrained Optimal
FINITE ELEMENT APPROXIMATION OF ELLIPTIC DIRICHLET OPTIMAL CONTROL PROBLEMS
 Numerical Functional Analysis and Optimization, 28(7 8):957 973, 2007 Copyright Taylor & Francis Group, LLC ISSN: 0163-0563 print/1532-2467 online DOI: 10.1080/01630560701493305 FINITE ELEMENT APPROXIMATION
Numerical Functional Analysis and Optimization, 28(7 8):957 973, 2007 Copyright Taylor & Francis Group, LLC ISSN: 0163-0563 print/1532-2467 online DOI: 10.1080/01630560701493305 FINITE ELEMENT APPROXIMATION
University of Houston, Department of Mathematics Numerical Analysis, Fall 2005
 3 Numerical Solution of Nonlinear Equations and Systems 3.1 Fixed point iteration Reamrk 3.1 Problem Given a function F : lr n lr n, compute x lr n such that ( ) F(x ) = 0. In this chapter, we consider
3 Numerical Solution of Nonlinear Equations and Systems 3.1 Fixed point iteration Reamrk 3.1 Problem Given a function F : lr n lr n, compute x lr n such that ( ) F(x ) = 0. In this chapter, we consider
PDE & FEM TERMINOLOGY. BASIC PRINCIPLES OF FEM.
 PDE & FEM TERMINOLOGY. BASIC PRINCIPLES OF FEM. Sergey Korotov Basque Center for Applied Mathematics / IKERBASQUE http://www.bcamath.org & http://www.ikerbasque.net 1 Introduction The analytical solution
PDE & FEM TERMINOLOGY. BASIC PRINCIPLES OF FEM. Sergey Korotov Basque Center for Applied Mathematics / IKERBASQUE http://www.bcamath.org & http://www.ikerbasque.net 1 Introduction The analytical solution
Approximation in Banach Spaces by Galerkin Methods
 2 Approximation in Banach Spaces by Galerkin Methods In this chapter, we consider an abstract linear problem which serves as a generic model for engineering applications. Our first goal is to specify the
2 Approximation in Banach Spaces by Galerkin Methods In this chapter, we consider an abstract linear problem which serves as a generic model for engineering applications. Our first goal is to specify the
Goal. Robust A Posteriori Error Estimates for Stabilized Finite Element Discretizations of Non-Stationary Convection-Diffusion Problems.
 Robust A Posteriori Error Estimates for Stabilized Finite Element s of Non-Stationary Convection-Diffusion Problems L. Tobiska and R. Verfürth Universität Magdeburg Ruhr-Universität Bochum www.ruhr-uni-bochum.de/num
Robust A Posteriori Error Estimates for Stabilized Finite Element s of Non-Stationary Convection-Diffusion Problems L. Tobiska and R. Verfürth Universität Magdeburg Ruhr-Universität Bochum www.ruhr-uni-bochum.de/num
Regularity Theory a Fourth Order PDE with Delta Right Hand Side
 Regularity Theory a Fourth Order PDE with Delta Right Hand Side Graham Hobbs Applied PDEs Seminar, 29th October 2013 Contents Problem and Weak Formulation Example - The Biharmonic Problem Regularity Theory
Regularity Theory a Fourth Order PDE with Delta Right Hand Side Graham Hobbs Applied PDEs Seminar, 29th October 2013 Contents Problem and Weak Formulation Example - The Biharmonic Problem Regularity Theory
Numerical Solutions to Partial Differential Equations
 Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University Variational Problems of the Dirichlet BVP of the Poisson Equation 1 For the homogeneous
Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University Variational Problems of the Dirichlet BVP of the Poisson Equation 1 For the homogeneous
Finite Element Method for Ordinary Differential Equations
 52 Chapter 4 Finite Element Method for Ordinary Differential Equations In this chapter we consider some simple examples of the finite element method for the approximate solution of ordinary differential
52 Chapter 4 Finite Element Method for Ordinary Differential Equations In this chapter we consider some simple examples of the finite element method for the approximate solution of ordinary differential
FEniCS Course. Lecture 8: A posteriori error estimates and adaptivity. Contributors André Massing Marie Rognes
 FEniCS Course Lecture 8: A posteriori error estimates and adaptivity Contributors André Massing Marie Rognes 1 / 24 A priori estimates If u H k+1 (Ω) and V h = P k (T h ) then u u h Ch k u Ω,k+1 u u h
FEniCS Course Lecture 8: A posteriori error estimates and adaptivity Contributors André Massing Marie Rognes 1 / 24 A priori estimates If u H k+1 (Ω) and V h = P k (T h ) then u u h Ch k u Ω,k+1 u u h
Constrained Minimization and Multigrid
 Constrained Minimization and Multigrid C. Gräser (FU Berlin), R. Kornhuber (FU Berlin), and O. Sander (FU Berlin) Workshop on PDE Constrained Optimization Hamburg, March 27-29, 2008 Matheon Outline Successive
Constrained Minimization and Multigrid C. Gräser (FU Berlin), R. Kornhuber (FU Berlin), and O. Sander (FU Berlin) Workshop on PDE Constrained Optimization Hamburg, March 27-29, 2008 Matheon Outline Successive
POD for Parametric PDEs and for Optimality Systems
 POD for Parametric PDEs and for Optimality Systems M. Kahlbacher, K. Kunisch, H. Müller and S. Volkwein Institute for Mathematics and Scientific Computing University of Graz, Austria DMV-Jahrestagung 26,
POD for Parametric PDEs and for Optimality Systems M. Kahlbacher, K. Kunisch, H. Müller and S. Volkwein Institute for Mathematics and Scientific Computing University of Graz, Austria DMV-Jahrestagung 26,
Hamburger Beiträge zur Angewandten Mathematik
 Hamburger Beiträge zur Angewandten Mathematik Space-time finite element approximation of parabolic optimal control problems Wei Gong, Michael Hinze, and Zhaojie Zhou Nr. 2-22 November 2 SPACE-IME FINIE
Hamburger Beiträge zur Angewandten Mathematik Space-time finite element approximation of parabolic optimal control problems Wei Gong, Michael Hinze, and Zhaojie Zhou Nr. 2-22 November 2 SPACE-IME FINIE
Goal-oriented error control of the iterative solution of finite element equations
 J. Numer. Math., Vol. 0, No. 0, pp. 1 31 (2009) DOI 10.1515/ JNUM.2009.000 c de Gruyter 2009 Prepared using jnm.sty [Version: 20.02.2007 v1.3] Goal-oriented error control of the iterative solution of finite
J. Numer. Math., Vol. 0, No. 0, pp. 1 31 (2009) DOI 10.1515/ JNUM.2009.000 c de Gruyter 2009 Prepared using jnm.sty [Version: 20.02.2007 v1.3] Goal-oriented error control of the iterative solution of finite
Adaptive approximation of eigenproblems: multiple eigenvalues and clusters
 Adaptive approximation of eigenproblems: multiple eigenvalues and clusters Francesca Gardini Dipartimento di Matematica F. Casorati, Università di Pavia http://www-dimat.unipv.it/gardini Banff, July 1-6,
Adaptive approximation of eigenproblems: multiple eigenvalues and clusters Francesca Gardini Dipartimento di Matematica F. Casorati, Università di Pavia http://www-dimat.unipv.it/gardini Banff, July 1-6,
A posteriori error estimation of approximate boundary fluxes
 COMMUNICATIONS IN NUMERICAL METHODS IN ENGINEERING Commun. Numer. Meth. Engng 2008; 24:421 434 Published online 24 May 2007 in Wiley InterScience (www.interscience.wiley.com)..1014 A posteriori error estimation
COMMUNICATIONS IN NUMERICAL METHODS IN ENGINEERING Commun. Numer. Meth. Engng 2008; 24:421 434 Published online 24 May 2007 in Wiley InterScience (www.interscience.wiley.com)..1014 A posteriori error estimation
Finite Element Methods for Fourth Order Variational Inequalities
 Louisiana State University LSU Digital Commons LSU Doctoral Dissertations Graduate School 2013 Finite Element Methods for Fourth Order Variational Inequalities Yi Zhang Louisiana State University and Agricultural
Louisiana State University LSU Digital Commons LSU Doctoral Dissertations Graduate School 2013 Finite Element Methods for Fourth Order Variational Inequalities Yi Zhang Louisiana State University and Agricultural
u = f in Ω, u = q on Γ. (1.2)
") ERROR ANALYSIS FOR A FINITE ELEMENT APPROXIMATION OF ELLIPTIC DIRICHLET BOUNDARY CONTROL PROBLEMS S. MAY, R. RANNACHER, AND B. VEXLER Abstract. We consider the Galerkin finite element approximation of
ERROR ANALYSIS FOR A FINITE ELEMENT APPROXIMATION OF ELLIPTIC DIRICHLET BOUNDARY CONTROL PROBLEMS S. MAY, R. RANNACHER, AND B. VEXLER Abstract. We consider the Galerkin finite element approximation of
High order, finite volume method, flux conservation, finite element method
 FLUX-CONSERVING FINITE ELEMENT METHODS SHANGYOU ZHANG, ZHIMIN ZHANG, AND QINGSONG ZOU Abstract. We analyze the flux conservation property of the finite element method. It is shown that the finite element
FLUX-CONSERVING FINITE ELEMENT METHODS SHANGYOU ZHANG, ZHIMIN ZHANG, AND QINGSONG ZOU Abstract. We analyze the flux conservation property of the finite element method. It is shown that the finite element
Priority Program 1253
 Deutsce Forscungsgemeinscaft Priority Program 53 Optimization wit Partial Differential Equations K. Deckelnick, A. Günter and M. Hinze Finite element approximation of elliptic control problems wit constraints
Deutsce Forscungsgemeinscaft Priority Program 53 Optimization wit Partial Differential Equations K. Deckelnick, A. Günter and M. Hinze Finite element approximation of elliptic control problems wit constraints
A posteriori error control for the binary Mumford Shah model
 A posteriori error control for the binary Mumford Shah model Benjamin Berkels 1, Alexander Effland 2, Martin Rumpf 2 1 AICES Graduate School, RWTH Aachen University, Germany 2 Institute for Numerical Simulation,
A posteriori error control for the binary Mumford Shah model Benjamin Berkels 1, Alexander Effland 2, Martin Rumpf 2 1 AICES Graduate School, RWTH Aachen University, Germany 2 Institute for Numerical Simulation,
Projected Surface Finite Elements for Elliptic Equations
 Available at http://pvamu.edu/aam Appl. Appl. Math. IN: 1932-9466 Vol. 8, Issue 1 (June 2013), pp. 16 33 Applications and Applied Mathematics: An International Journal (AAM) Projected urface Finite Elements
Available at http://pvamu.edu/aam Appl. Appl. Math. IN: 1932-9466 Vol. 8, Issue 1 (June 2013), pp. 16 33 Applications and Applied Mathematics: An International Journal (AAM) Projected urface Finite Elements
Proper Orthogonal Decomposition for Optimal Control Problems with Mixed Control-State Constraints
 Proper Orthogonal Decomposition for Optimal Control Problems with Mixed Control-State Constraints Technische Universität Berlin Martin Gubisch, Stefan Volkwein University of Konstanz March, 3 Martin Gubisch,
Proper Orthogonal Decomposition for Optimal Control Problems with Mixed Control-State Constraints Technische Universität Berlin Martin Gubisch, Stefan Volkwein University of Konstanz March, 3 Martin Gubisch,