Adaptive Finite Element Methods for Elliptic Optimal Control Problems
|
|
|
- Lenard Bradford
- 5 years ago
- Views:
Transcription
1 Adaptive Finite Element Methods for Elliptic Optimal Control Problems Ronald H.W. Hoppe 1,2 1 2 Institute of Mathematics, University of Augsburg Summer School Optimal Control of PDEs Cortona, July 12-17, 2010
2 Books on Adaptive Finite Element Methods M. Ainsworth and J.T. Oden; A Posteriori Error Estimation in Finite Element Analysis. Wiley, Chichester, I. Babuska and T. Strouboulis; The Finite Element Method and its Reliability. Clarendon Press, Oxford, W. Bangerth and R. Rannacher; Adaptive Finite Element Methods for Differential Equations. Birkhäuser, Basel, K. Eriksson, D. Estep, P. Hansbo, and C. Johnson; Computational Differential Equations. Cambridge University Press, Cambridge, P. Neittaanmäki and S. Repin; Reliable methods for mathematical modelling. Error control and a posteriori estimates. Elsevier, New York, R. Verfürth; A Review of A Posteriori Estimation and Adaptive Mesh-Refinement Techniques. Wiley-Teubner, New York, Stuttgart, 1996.
3 Adaptive Finite Element Methods for Optimal Control Problems R. Becker, H. Kapp, and R. Rannacher; Adaptive finite element methods for optimal control of partial differential equations: basic concept. SIAM J. Control Optim., 39, , O. Benedix and B. Vexler; A posteriori error estimation and adaptivity for elliptic optimal control problems with state constraints. Computational Optimization and Applications 44, 3-25, A. Gaevskaya, R.H.W. Hoppe, Y. Iliash, and M. Kieweg; Convergence analysis of an adaptive finite element method for distributed control problems with control constraints. Proc. Conf. Optimal Control for PDEs, Oberwolfach, Germany (G. Leugering et al.; eds.), Birkhäuser, Basel, 2006.
4 Adaptive Finite Element Methods for Optimal Control Problems A. Gaevskaya, R.H.W. Hoppe, and S. Repin; Functional approach to a posteriori error estimation for elliptic optimal control problems with distributed control. Journal of Math. Sciences 144, , A. Günther and M. Hinze; A posteriori error control of a state constrained elliptic control problem. J. Numer. Math., 16, , M. Hintermüller and R.H.W. Hoppe; Goal-oriented adaptivity in control constrained optimal control of partial differential equations. SIAM J. Control Optim. 47, , 2008.
5 Adaptive Finite Element Methods for Optimal Control Problems M. Hintermüller, R.H.W. Hoppe, Y. Iliash, and M. Kieweg; An a posteriori error analysis of adaptive finite element methods for distributed elliptic control problems with control constraints. ESAIM: Control, Optimisation and Calculus of Variations 14, , R.H.W. Hoppe, Y. Iliash, C. Iyyunni, and N. Sweilam; A posteriori error estimates for adaptive finite element discretizations of boundary control problems. J. Numer. Math. 14, 57 82, R.H.W. Hoppe and M. Kieweg; A posteriori error estimation of finite element approximations of pointwise state constrained distributed parameter problems. J. Numer. Math. 17, , 2009.
6 Adaptive Finite Element Methods for Optimal Control Problems R. Li, W. Liu, H. Ma, and T. Tang; Adaptive finite element approximation for distributed elliptic optimal control problems. SIAM J. Control Optim., 41, , A. Schiela and A. Günther; Interior point methods in function space for state state constraints - inexact Newton and adaptivity. ZIB-Report 09-01, Konrad-Zuse-Zentrum für Informationstechnik Berlin, B. Vexler and W. Wollner; Adaptive finite elements for elliptic optimization problems with control constraints. SIAM J. Control Optim., 47, , 2008
7 Adaptive Finite Element Methods for Control Constrained Optimal Elliptic Control Problems Ronald H.W. Hoppe 1,2 1 2 Institute of Mathematics, University of Augsburg Summer School Optimal Control of PDEs Cortona, July 12-17, 2010
8 AFEM for Control Constrained Elliptic Optimal Control Problems Review of the a posteriori error analysis of adaptive finite element methods Distributed optimal control problem with control constraints Residual-type a posteriori error estimator Reliability and discrete local efficiency
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30 Discrete Local Efficiency
31 Discrete Local Efficiency of the Error Estimator Theorem Suppose that T T H (Ω) is a refined element and that (y H,p H,u H, σ H ) and (y h,p h,u h, σ h ) are the finite element approximations w.r.t. the triangulations T H (Ω) and T h (Ω). Then there holds η 2 y,t y H y h 2 1,T + h2 T u H u h 2 0,T + osc2 T (f), (η (1) p,t )2 p H p h 2 1,T + y H y h 2 1,T + osc2 T (yd ). Proof: Let ϕ a h V h be a nodal basis function associated with an interior point a N H (T). Then, with z h := (f T + u H )ϕ a h there holds ( ) ( ) η 2 y,t h 2 T(f+u h,z h ) 0,T + h 2 T u H u h 0,T +osc T (y d ) z h 0,T + osc 2 T(f). Since z h is an admissible test function, we have a T (y h,z h ) = (f + u h,z h ) 0,T. Moreover, Green s formula reveals a T (y H,z h ) = 0, and hence h 2 T(f + u h,z h ) 0,T = h 2 T a(y h y H,z h ) h 2 T y h y H 1,T z h 1,T. Inserting into ( ) and using Young s inequality, gives the assertion.
32 Discrete Local Efficiency of the Error Estimator Theorem Suppose that T T H (Ω) is a refined element and that (y H,p H,u H, σ H ) and (y h,p h,u h, σ h ) are the finite element approximations w.r.t. the triangulations T H (Ω) and T h (Ω). Then there holds M H p H p H 0,T p H p h 1,T + α u H u h 0,T + σ H σ h 0,T + α u d H ud h 0,T. Proof: The result follows readily by means of M H p H M h p h = α (u h u H ) + α (u d H ud h ) + σ H σ h and M h p H p H 0,T ρ M H p H p H 0,T, where 0 < ρ < 1 only depends on the shape regularity of the triangulation.
33 Discrete Local Efficiency of the Error Estimator Theorem Suppose that E E H (Ω) is a refined edge and that (y H,p H,u H, σ H ) and (y h,p h,u h, σ h ) are the finite element approximations w.r.t. the triangulations T H (Ω) and T h (Ω). Let further ω E := T 1 T 2, where T ν E H (Ω),1 ν 2, such that E = T 1 T 2. Then there holds Proof: Let ϕ mid E h η 2 y,e y H y h 2 1,ω E + h 2 T u H u h 2 0,ω E + η 2 y,ω, η 2 p,e p H p h 2 1,ω E + y H y h 2 1,ω E + η 2 p,e. V h be the nodal basis function associated with mid(e) N h (Ω). Then, the function z h := [ν E y H ]ϕ mid E h satisfies [ν E y H ] 2 0,E ([ν E y H ],z h ) 0,T, z h 0,E h 1/2 E [ν E y H ] 0,ω E, z h 1,T h 1/2 E [ν E y H ] 0,ω E. Since z h is an admissible test function, we have a ω E (y h,z h ) = (f + u h,z h ) 0,ω E, and hence η 2 y,e = h E [ν E y H ] 2 0,E h E ([ν E y H ],z h ) 0,E = h E ( a ω E (y H y h,z h ) + (u H u h,z h ) 0,ω E + (f+u H,z h ) 0,ω E ) h 1/2 E [ν E y H ] 0,E ( y H y h 1,ω E + h T u H u h 0,ω E + η y,ω E ).
34 Discrete Local Efficiency of the Error Estimator Theorem Let (y H,p H,u H, σ H ) and (y h,p h,u h, σ h ) be the finite element approximations with respect to the triangulations T H (Ω) and T h (Ω), respectively. Then, for T A H (u H ) there holds ( ) (σ H, ψ ψ H ) 0,T p H p h 2 1,T + u H u h 2 0,T + σ H σ h 2 0,T + µ 2 T (ud ) +µ T (ψ). Proof: Since ψ H = u H for T A H (u H ), it follows that (σ H, ψ ψ H ) 0,T = (σ H, ψ u H ) 0,T = (σ H, ψ u h ) 0,T + (σ H,u h u H ) 0,T. Using (σ h,u h ψ h ) 0,T = 0, for the first term on the right-hand side we obtain (σ H, ψ u h ) 0,T = (σ H, ψ ψ H ) 0,T + (σ H,u h u H ) 0,T. (σ H,u h u H ) 0,T = α (u d H u d h,u h u H ) 0,T + (σ h,u h u H ) 0,T + (M H p H M h p h,u h u H ) 0,T + α u h u H 2 0,T. On the other hand, for the second term we have (σ H, ψ u h ) 0,T = (σ H, ψ u H ) 0,T }{{} = (σ H,ψ ψ H ) 0,T (σ H,u h u H ) 0,T.
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53 Adaptive Finite Element Methods for State Constrained Optimal Elliptic Control Problems Ronald H.W. Hoppe 1,2 1 2 Institute of Mathematics, University of Augsburg Summer School Optimal Control of PDEs Cortona, July 12-17, 2010
54 C O N T E N T S I. State Constrained Optimal Control of Elliptic PDEs Optimality conditions and finite element discretization II. Residual-Type a posteriori error estimators Element/edge residuals, data oscillations, and consistency error Reliabilty and local efficiency of the error estimator Lavrentiev regularization: Mixed control-state constraints III. Goal Oriented Dual Weighted Approach Primal-dual weighted error terms in the state and the adjoint state Consistency error and the structure of the Lagrange multiplier
55 Literature on State-Constrained Optimal Control Problems M. Bergounioux, K. Ito, and K. Kunisch (1999) M. Bergounioux, M. Haddou, M. Hintermüller, and K. Kunisch (2000) M. Bergounioux and K. Kunisch (2002) E. Casas (1986) E. Casas and M. Mateos (2002) E. Casas, F. Tröltzsch, and A. Unger (2000) K. Deckelnick and M. Hinze (2006) M. Hintermüller and K. Kunisch (2007) K. Kunisch and A. Rösch (2002) C. Meyer and F. Tröltzsch (2006) C. Meyer, U. Prüfert, and F. Tröltzsch (2005) U. Prüfert, F. Tröltzsch, and M. Weiser (2004) A. Rösch and F. Tröltzsch (2006)
56 Model Problem (Distributed Elliptic Control Problem with State Constraints) Let Ω lr 2 be a bounded domain with boundary Γ = Γ D Γ N, Γ D Γ N =, and let A : V H 1 (Ω), V := {v H 1 (Ω) v Γd = 0}, be the linear second order elliptic differential operator Ay := y + cy, c 0, with c > 0 or meas(γ D ) > 0. Assume that Ω is such that for each v L 2 (Ω) the solution y of Ay = u satisfies y W 1,r (Ω) V for some r > 2. Moreover, let u d,y d L 2 (Ω), and ψ W 1,r (Ω) such that ψ ΓD > 0 be given functions and let α > 0 be a regularization parameter. Consider the state constrained distributed elliptic control problem Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u ud 2 0,Ω, subject to Ay = u in Ω, y = 0 on Γ D, ν y = 0 on Γ N, Iy K := {v C(Ω) v(x) ψ(x), x Ω}. where I stands for the embedding operator W 1,r (Ω) C(Ω).
57 We introduce the control-to-state map The Reduced Optimal Control Problem G : L 2 (Ω) C(Ω), y = Gu solves Ay + cy = u. We assume that the following Slater condition is satisfied (S) There exists v 0 L 2 (Ω) such that Gv 0 int(k). Substituting y = Gu allows to consider the reduced control problem inf u U ad J red (u) := 1 2 Gu yd 2 0,Ω + α 2 u ud 2 0,Ω, U ad := {v L 2 (Ω) (Gv)(x) ψ(x), x Ω}. Theorem (Existence and uniqueness). The state constrained optimal control problem admits a unique solution y W 1,r (Ω) K.
58 Optimality Conditions for the State Constrained Optimal Control Problem Theorem. There exists an adjoint state p V s := {v W 1,s (Ω) v ΓD = 0}, where 1/r + 1/s = 1, and a multiplier σ M + (Ω) such that ( y, v) 0,Ω + (cy,v) 0,Ω = (u,v) 0,Ω, v V, ( p, w) 0,Ω + (cp,w) 0,Ω = (y y d,w) 0,Ω + σ,x, w V r, p + α(u u d ) = 0, σ,y ψ = 0.
59 Proof: The reduced problem can be written in unconstrained form as inf Ĵ(v) := J red (v) + (I K G)(v), v L 2 (Ω) where I K stands for the indicator function of the constraint set K. The Slater condition and subdifferential calculus give rise to the optimality condition 0 Ĵ(u) = J red(u) + (I K G)(u) = J red(u) + G I K (Gu). Hence, there exists σ I K (Gu) such that (y(u) y d,y(v)) 0,Ω + α(u u d,v) 0,Ω + (G σ,v) 0,Ω = 0, v L 2 (Ω). We define σ := G σ as a regularization of σ and introduce p V as the solution of ( p, v) 0,Ω + (c p,v) 0,Ω = (y(u) y d,v) 0,Ω, v V. We set p := p + σ. Since σ M(Ω), we have σ V s [Casas;1986] whence p V s.
60 Finite Element Approximation Let T l (Ω) be a simplicial triangulation of Ω and let V l := { v l C(Ω) v l T P 1 (T), T T l (Ω), v l ΓD = 0 } be the FE space of continuous, piecewise linear functions. Let u d l V l be some approximation of ud, and let ψ l be the V l -interpoland of ψ. Consider the following FE Approximation of the state constrained control problem Minimize J l (y l,u l ) := 1 2 y l yd 2 0,Ω + α 2 u l ud l 2 0,Ω, over (y l,u l ) V l V l, subject to ( y l, v l ) 0,Ω + (cy l,v l ) 0,Ω = (u l,v l ) 0,Ω, v l V l, y l K l := {v l V l v l (x) ψ l (x), x Ω}. Since the constraints are point constraints associated with the nodal points, the discrete multipliers are chosen from M l := {µ l M(Ω) µ l = a N l (Ω Γ N ) κ a δ a, κ a lr}.
61 Optimality Conditions for the FE Discretized Optimal Control Problem Theorem 2. There exists a discrete adjoint state p l V l, and a discrete multiplier σ l with σ l M l M + (Ω) such that ( y l, v l ) 0,Ω + (cy l,v l ) 0,Ω = (u l,v l ) 0,Ω, v l V l, ( p l, w l ) 0,Ω + (cp l,w l ) 0,Ω = (y l y d,w l ) 0,Ω + σ l,w l, w l V l, p l + α(u l u d l ) = 0, σ l,y l ψ l = 0. We introduce a regularized discrete multiplier σ l V l according to ( σ l, v l ) 0,Ω + (c σ l,v l ) 0,Ω = σ l,v l ) 0,Ω, v l V l, and a regularized discrete adjoint state p l V l as the solution of ( p l, w l ) 0,Ω + (c p l,w l ) 0,Ω = (y l y d,w l ) 0,Ω, w l V l. As in the continuous regime, we have p l = p l + σ l.
62 Residual Type A Posteriori Error Estimator The error estimator η l := η l (y) + η l (p) consists of element and edge residuals for the state and the modified adjoint state: η l (y) := ( η 2 T(y) + T T l (Ω) η 2 E(y)) 1/2, η l (p) := ( ((η 2 l (p) + E E l (Ω) T T l (Ω) E E l (Ω) η 2 E(p)) 1/2 (i) Element and edge residuals for the state y η T (y) := h T cy l u l 0,T }{{} element residuals, T T l (Ω), η E (y) := h 1/2 E ν E [ y l ] 0,E }{{} edge residuals, E E l (Ω) (ii) Element and edge residuals for the modified adjoint state p η T (p) := h T cp l (y l y d ) 0,T }{{} element residuals, T T l (Ω), η E (p) := h 1/2 E ν E [ p l ] 0,E, E E }{{} l (Ω). edge residuals
63 Data Oscillations in the Data u d and y d Data oscillations occur in the shift control u d and in the desired state y d : osc l := (osc 2 l (ud ) + osc 2 l (yd )) 1/2 (i) Low order data oscillations in u d osc l (u d ) := ( osc T (u d ) 2 ) 1/2, osc T (u d ) := u d u d l T T l (Ω) 0,T (ii) Higher order data oscillations in y d osc l (y d ) := ( osc T (y d ) 2 ) 1/2, osc T (y d ) := h T y d yh d 0,T T T l (Ω)
64 Bulk Criteria and Refinement Strategy Given universal constants Θ i, 1 i 4, choose a set of edges Mη,E E l (Ω) and sets of elements Mη,T, M osc,y d, M osc,u d T l (Ω) such that Θ 1 E E l (Ω) (η 2 y,e + η 2 p,e) E Mη,E (η 2 y,e + η 2 p,e), Θ 3 Θ 2 T T l (Ω) osc 2 T(y d ) T T l (Ω) (η 2 y,t + η 2 p,t) E M osc,y d E Mη,T osc 2 T(y d ), Θ 4 (η 2 y,t + η 2 p,t), T T l (Ω) osc 2 T(u d ) E M osc,u d osc 2 T(u d ). We set M T := Mη,T M osc,y d M osc,u d and refine an element T T l (Ω) by bisection, if T M T. An element E E l (Ω) is refined by bisection, if E Mη,E. Moreover, all elements T T l (Ω) that share at least one edge with the discrete free boundary are refined by bisection.
65 Auxiliary States and Consistency Error The error analysis involves an auxiliary state y(u l ) V and an auxiliary adjoint state p(y l ) V which are given as follows ( y(u l ), v) 0,Ω + (cy(u l ),v) 0,Ω = (u l,v) 0,Ω, v V, ( p(y l ), v) 0,Ω + (c p(y l,v) 0,Ω = (y l yd,v) 0,Ω, v V. We also introduce an auxiliary discrete state y l (u) V l according to ( y l (u), v l ) 0,Ω + (cy l (u),v l ) 0,Ω = (u,v l ) 0,Ω, v l V l. In general, neither y(u l ) K nor y l (u) K l. Therefore, there is a consistency error e c (u,u l ) := max( σ l,y l (u) ψ l + σ,y(u l ) ψ,0). Since e c (u,u l ) = 0 for u = u l, we define ẽ c (u,u l ) := e c (u,u l )/ u u l 0,Ω, u u l 0, u = u l.
66 Reliability of the A Posteriori Error Estimator Theorem. For the errors e y := y y l in the state, e p := p p l, e p := p p l in the adjoint and modified adjoint state, and e u := u u l in the control there holds e y 1,Ω + e p 1,Ω + e p 0,Ω + e u 0,Ω η l + osc l (ud ) + ẽ c (u,u l ). Proof: We will show that for e y,e p and e u there holds e y 1,Ω + e p 1,Ω + e u 0,Ω η l + osc l (ud ) + ẽ c (u,u l ). Since p + α(u u d ) = 0 and p l + α(u l u d l ), we have e p = α((u d u d l ) e u) whence e p 0,Ω e u 0,Ω + osc l (ud )).
67 Reliability of the A Posteriori Error Estimator (Cont d) Lemma. For the errors e y := y y l in the state, e p := p p l in the modified adjoint state, and e u := u u l in the control there holds e y 1,Ω + e p 1,Ω + e u 0,Ω η l + osc l (ud ) + ẽ c (u,u l ). Proof: Straightforward estimation from above results in e y 1,Ω y y(u l ) 1,Ω + y(u l ) y l 1,Ω }{{} η l (y), e p 1,Ω p p(y l ) 1,Ω + p(y l ) p l 1,Ω }{{} η l ( p). On the other hand, using the ellipticity of the differential operator y y(u l 1,Ω e u 0,Ω, p p(y l ) 1,Ω e u 0,Ω + y(u l ) y l 1,Ω }{{} η l (y). Hence, it remains to estimate the L 2 -error e u 0,Ω in the control.
68 Reliability of the A Posteriori Error Estimator (Cont d) Proof (Cont d): Using p = α(u d u) and p l = α(u d l u l ) as well as p = p + σ and p l = p l + σ l e u 2 0,Ω = (e u,u d u d l ) 0,Ω }{{} =: I + α 1 (e u, p l p(y l ) 0,Ω }{{} =: II By Young s inequality, for the two first terms we obtain + α 1 (e u, p(y l ) p) 0,Ω }{{} =: III + α 1 (e u, σ l σ) 0,Ω }{{} =:IV. I 1 8 e u 2 0,Ω + 2 osc2 l (ud ), II α 8 e u 2 0,Ω + 2 α p l p(y l ) 2 1,Ω }{{} η l ( p). For the third term, we use the duality between the state and the auxiliary adjoint state equations in the continuous and discrete regime. Setting v := p(y l ) p and v = y(u l ) y: III = (e u, p(y l ) p) 0,Ω = (y y l,y(u l ) y) 0,Ω = y y(u l ) 2 0,Ω + (y(u l ) y l,y(u l ) y) 0,Ω y(u l ) y l 1,Ω y y(u l 1,Ω C y(u l ) y l 1,Ω e u 0,Ω α 8 e u 2 0,Ω + 2C2 α η2 l (y).
69 Reliability of the A Posteriori Error Estimator (Cont d) Proof (Cont d): The estimate of the fourth term essential relies on the complementary conditions and results in the consistency error due to the mismatch between the continuous and discrete free boundaries. Using the auxiliary states y(u l ) and y l (u), we obtain (e u, σ l σ) 0,Ω = ( (y l (u) y l, σ l ) 0,Ω + (c(y l (u) y l ), σ l ) 0,Ω = σ l,y l (u) ψ l + σ l,, ψ l y l }{{} = 0 ( (y y(u l ), σ) 0,Ω (c(y y(u l )), σ) 0,Ω = + σ,y(u l ) ψ + σ, ψ y }{{} = 0 e u 0,Ω ẽ c (u,u l ) α 8 e u 2 0,Ω + 2 α ẽ2 c(u,u l ). Collecting the estimates for terms I IV gives the assertion.
70 Efficiency of the A Posteriori Error Estimator Theorem. For the errors e y := y y l in the state, e p := p p l in the regularized adjoint state, and e u := u u l in the control there holds η l osc l (y d ) e y 1,Ω + e p 1,Ω + e u 0,Ω. Proof: The assertion follows by standard arguments from the a posteriori error analysis of adaptive finite element methods.
71 Numerical Results: Distributed Control Problem with State Constraints I Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u ud 2 0,Ω over (y,u) H 1 0(Ω) L 2 (Ω) subject to y = u in Ω, y K := {v H 1 0(Ω) v ψ a.e. in Ω} Data: Ω := ( 2, +2) 2, y d (r) := y(r) + p(r) + σ(r), u d (r) := u(r) + α 1 p(r), ψ := 0, α := 0.1, where y(r),u(r),p(r), σ(r) is the solution of the problem: y(r) := r 4/3 + γ 1 (r), u(r) = y(r), p(r) = γ 2 (r) + r r r2, σ(r) :=, γ 1 := γ 2 := 1, r < (r 0.25) (r 0.25) 4 80(r 0.25) 3 + 1, 0.25 < r < , otherwise { 1, r < , otherwise. { 0.0, r < , otherwise,
72 Numerical Results: Distributed Control Problem with State Constraints I Optimal state (left) and optimal control (right)

 and regularized")
73 Numerical Results: Distributed Control Problem with State Constraints I Optimal adjoint state (left) and regularized adjoint state (right)
74 Numerical Results: Distributed Control Problem with State Constraints I Adaptively refined grid after 12(left) and 14 (right) iterations
75 Numerical Results: Distributed Control Problem with State Constraints I l N dof z z l y y l 1 u u l 0 p p l 0 p p l e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e-02 Total error, errors in the state, control, and adjoint state (Θ i = 0.7)
76 Numerical Results: Distributed Control Problem with State Constraints I l N dof η l (y) η l (p) osc l (u d ) osc l (y d ) ẽ c (u,u l ) e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e+00 Components of the error estimator, data oscillations, and the consistency error
77 Numerical Results: Distributed Control Problem with State Constraints I l N dof M fb,t Mη,E Mη,T M osc,y d M osc,u d Percentages of elements/edges marked by the bulk criteria
78 Numerical Results: Distributed Control Problem with State Constraints II Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u ud 2 0,Ω over (y,u) H 1 (Ω) L 2 (Ω) subject to y + cy = u in Ω, y K := {v H 1 (Ω) v ψ a.e. in Ω} Data: Ω = B(0,1) := {x = (x 1,x 2 ) T x x 2 2 < 1}, y d (r) := π 1 4π r π ln(r), u d (r) := π r2 1 ln(r), ψ := 4 + r, α := 1. 2π The solution y(r),u(r),p(r), σ(r) of the problem is given by y(r) 4, u(r) 4, p(r) = 1 4π r2 1 2π ln(r), σ(r) = δ 0.
79 Numerical Results: Distributed Control Problem with State Constraints II Optimal state (left) and optimal control (right)
 and regularized adjoint state (right)")
80 Numerical Results: Distributed Control Problem with State Constraints II Optimal adjoint state (left) and regularized adjoint state (right)
81 Numerical Results: Distributed Control Problem with State Constraints II l N dof z z l y y l 1 u u l 0 p p l 0 p p l e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e-04 Total error, errors in the state, control, and adjoint state (Θ i = 0.7)
82 Numerical Results: Distributed Control Problem with State Constraints II l N dof η l (y) η l (p) osc l (u d ) osc l (y d ) ẽ c (u,u l ) e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e+00 Components of the error estimator, data oscillations, and the consistency error
83 Numerical Results: Distributed Control Problem with State Constraints II l N dof M fb,t Mη,E Mη,T M osc,y d M osc,u d Percentages of elements/edges marked by the bulk criteria
84 Lavrentiev Regularization: Mixed Control-State Constraints Introduce a regularization parameter ε > 0 and consider the mixed controlstate constrained optimal control problem Minimize J(y ε,u ε ) := 1 2 yε y d 2 0,Ω + α 2 uε u d 2 0,Ω, subject to Ay ε = u ε in Ω, y ε = 0 on Γ D, ν y ε = 0 on Γ N, εu ε + y ε K := {v L 2 (Ω) v(x) ψ(x), f.a.a. x Ω}. Theorem (Optimality conditions). The optimal solution (y ε,u ε ) V L 2 (Ω) is characterized by the existence of an adjoint state p ε V and a multiplier σ ε L 2 +(Ω) such that ( y ε, v) 0,Ω + (cyε,v) 0,Ω = (uε,v) 0,Ω, v V, ( p ε, v) 0,Ω + (cpε,v) 0,Ω = (yε y d,v) 0,Ω + (σε,v) 0,Ω, v V, p ε + α (u ε u d ) + εσ ε = 0, (σ ε, εu ε + y ε ψ) 0,Ω = 0.
85 Features of the Lavrentiev Regularization Since the Lavrentiev regularization formally represents a control constrained optimal control problem, numerical solution techniques for the control constrained case can be employed. Does this also hold true for the a posteriori error estimation? Apply the a posteriori error estimator from [Hintermüller/H./Iliash/Kieweg] to the mixed control-state constrained problem: η T (y ε ) = h T cy ε l uε l 0,T, η T (p ε ) = h T cp ε l (yε l yd ) σ ε l 0,T, η E (y ε ) = h 1/2 E ν E [ y ε l ] 0,E, η E (p ε ) = h T ν E [ p ε l ] 0,E. Since we are interested in the approximation of the solution (y,u,p) of the state-constrained problem by (y ε,u ε,p ε ) as ε 0, but p lacks smoothness and σ / L 2 +(Ω), we have to proceed by appropriate regularizations.
86 Regularization of the Multiplier and of the Adjoint State We define a regularized multiplier σ ε V and a regularized adjoint state p ε V as the solution of ( σ ε, v) 0,Ω + (c σε,v) 0,Ω = (σε,v) 0,Ω, v V, ( p ε, v) 0,Ω + (c pε,v) 0,Ω = (yε y d,v) 0,Ω, v V. In the discrete regime, we define σ ε l V l and pε l V l analogously. This gives rise to the following element and edge residuals η T (y ε ) = h T cy ε l uε l 0,T, η T ( p ε ) = h T c p ε l (yε l yd ) 0,T, η E (y ε ) = h 1/2 E ν E [ y ε l ] 0,E, η E ( p ε ) = h T ν E [ p ε l ] 0,E.
87 Error Analysis of the Mixed Control-State Optimal Control Problem Theorem (Reliability of the Estimator). For the errors e(y ε ) := y ε y ε l in the state, e( p ε ) := p ε p ε l in the regularized adjoint state, and e(uε ) := u ε u ε l in the control there holds uniformly in ε > 0 e(y ε ) 1,Ω + e(uε ) 0,Ω + e( pε ) 1,Ω η l + osc l (y d ) + osc l (u d ) + osc l (ψ) + ẽ c (u ε,u ε l ) + ẽ c(ψ, ψ l ). Compared to the case of pure state constraints, the error analysis involves data oscillations in ψ and an additional consistency error osc T (ψ) := ψ ψ l 0,T, ẽ c (ψ, ψ l ) := e c (ψ, ψ l )/ ψ ψ l 0,Ω, ψ ψ l, 0, ψ = ψ l e c (ψ, ψ l ) := max((σ ε σ ε l, ψ ψ l ) 0,Ω,0).
88 Numerical Results: Mixed Control-State Constraints II l N dof y y l 1 u u l 0 p p l 0 Mη,E Mη,T M osc1,t M osc2,t e e e e e e e e e e e e e e e e e e e e e e e e Errors in the state, control, and adjoint state (ε = 10 4, Θ i = 0.7)
89 Goal-Oriented Adaptivity in State Constrained Optimal Control Problems Under the same assumptions as before, consider the state constrained distributed elliptic control problem Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u 2 0,Ω, subject to Ay = u in Ω, y = 0 on Γ D, ν y = 0 on Γ N, Iy K := {v C(Ω) v(x) ψ(x), x Ω}. and its finite element approximation with respect to a shape regular family of simplicial triangulations T l (Ω) of the computational domain Ω. The goal is to provide a reliable error estimate in a quantity of interest which is chosen here as the objective functional J(y,u).
90 Error Representation in Goal-Oriented Adaptivity We introduce the Lagrangian L : V r L 2 (Ω) V s M + ( Ω) lr according to L(y,u,p, σ) := J(y,u) + ( y, p) 0,Ω (u,p) 0,Ω + σ,y ψ, and refer to L l : V l V l V l (M l M + ( Ω)) lr as its discrete counterpart. Theorem. Let (x, σ) X M + ( Ω),x := (y,u,p) X := V r L 2 (Ω) V s, and (x l, σ l ) X l (M l M + ( Ω)),x l := (y l,u l,p l ) X l := V l V l V l, be the solutions of the continuous and discrete problem, respectively. Then, we have J(y,u) J l (y l,u l ) = 1 2 xxl(x l x,x l x) + σ,y l ψ + osc (1) l (x l ), where the oscillation term osc (1) l (x l ) is given by osc (1) l (x l ) := (y l yd,yl d yd ) 0,Ω + osc2 l (yd ).
91 Error Representation in Goal-Oriented Adaptivity (Cont d) Remark 1: In the unconstrained case, i.e., σ = σ l = 0, the error representation reduces to J(y,u) J l (y l,u l ) = = x L(x l, σ l )(x x l x l ) (yd y d l,y y l ) 0,Ω + osc l (x l ), which corresponds to Proposition 4.1 in [Becker/Kapp/Rannacher]. Remark 2: The contribution σ,y l ψ can be rewritten as σ,y l ψ = σ,y l ψ l + σ, ψ l ψ and thus represents the primal-dual weighted mismatch in complementarity and due to the approximation of ψ by ψ l.
92 Error Representation in Goal-Oriented Adaptivity (Cont d) Theorem. With interpolation operators I l p : Vp V l,1 < p < there holds J(y,u) J l (y l,u l ) = = 1 2 { ( p l, (Ir l y y)) 0,Ω + (cp l (y l yd l ), Ir l y y) 0,Ω σ l, Ir l y y + + ( y l, (Il s p p)) 0,Ω + (cy l u l, Ir l p p) 0,Ω } + + [ σ,y l ψ + σ l, ψ l y ] }{{} primal-dual mismatch (yd y d l,y y l ) 0,Ω + osc(1) l (x l ) }{{} =: osc (2) l (x l). We note that the terms in brackets { } represent the primal-dual residuals.
93 Goal Oriented Dual Weighted Residuals for Control and State Constrained Optimal Elliptic Control Problems Ronald H.W. Hoppe 1,2 1 2 Institute of Mathematics, University of Augsburg Summer School Optimal Control of PDEs Cortona, July 12-17, 2010
94 The work has been partially supported by the NSF under Grants No. DMS , DMS and by the FWF
95 The Loop in Adaptive Finite Element Methods (AFEM) Adaptive Finite Element Methods (AFEM) consist of successive loops of the cycle SOLVE: SOLVE = ESTIMATE = MARK = REFINE Numerical solution of the FE discretized problem ESTIMATE: Residual and hierarchical a posteriori error estimators Error estimators based on local averaging Goal oriented weighted dual approach Functional type a posteriori error bounds MARK: REFINE: Strategies based on the max. error or the averaged error Bulk criterion for AFEMs Bisection or red/green refinement or combinations thereof
96 C O N T E N T S Representation of the error in the quantity of interest Primal-Dual Weighted Residuals Primal-Dual Mismatch in Complementarity Primal-Dual Weighted Data Oscillations Numerical Results
97 State Constrained Elliptic Control Problems
98 Literature on State-Constrained Optimal Control Problems M. Bergounioux, K. Ito, and K. Kunisch (1999) M. Bergounioux, M. Haddou, M. Hintermüller, and K. Kunisch (2000) M. Bergounioux and K. Kunisch (2002) E. Casas (1986) E. Casas and M. Mateos (2002) J.-P. Raymond and F. Tröltzsch (2000) K. Deckelnick and M. Hinze (2006) M. Hintermüller and K. Kunisch (2007) K. Kunisch and A. Rösch (2002) C. Meyer and F. Tröltzsch (2006) C. Meyer, U. Prüfert, and F. Tröltzsch (2005) U. Prüfert, F. Tröltzsch, and M. Weiser (2004) H./M. Kieweg (2007) A. Günther, M. Hinze (2007) O. Benedix, B. Vexler (2008) M. Hintermüller/H. (2008) W. Liu, W. Gong and N. Yan (2008)
99 Model Problem (Distributed Elliptic Control Problem with State Constraints) Let Ω lr 2 be a bounded domain with boundary Γ = Γ D Γ N, Γ D Γ N =, and let A : V H 1 (Ω), V := {v H 1 (Ω) v Γd = 0}, be the linear second order elliptic differential operator Ay := y + cy, c 0, with c > 0 or meas(γ D ) > 0. Assume that Ω is such that for each v L 2 (Ω) the solution y of Ay = u satisfies y W 1,r (Ω) V for some r > 2. Moreover, let u d,y d L 2 (Ω), and ψ W 1,r (Ω) such that ψ ΓD > 0 be given functions and let α > 0 be a regularization parameter. Consider the state constrained distributed elliptic control problem Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u ud 2 0,Ω, subject to Ay = u in Ω, y = 0 on Γ D, ν y = 0 on Γ N, Iy K := {v C(Ω) v(x) ψ(x), x Ω}. where I stands for the embedding operator W 1,r (Ω) C(Ω).
100 We introduce the control-to-state map The Reduced Optimal Control Problem G : L 2 (Ω) C(Ω), y = Gu solves Ay + cy = u. We assume that the following Slater condition is satisfied (S) There exists v 0 L 2 (Ω) such that Gv 0 int(k). Substituting y = Gu allows to consider the reduced control problem inf u U ad J red (u) := 1 2 Gu yd 2 0,Ω + α 2 u ud 2 0,Ω, U ad := {v L 2 (Ω) (Gv)(x) ψ(x), x Ω}. Theorem (Existence and uniqueness). The state constrained optimal control problem admits a unique solution y W 1,r (Ω) K.
101 Optimality Conditions for the State Constrained Optimal Control Problem Theorem. There exists an adjoint state p V s := {v W 1,s (Ω) v ΓD = 0}, where 1/r + 1/s = 1, and a multiplier σ M + (Ω) such that ( y, v) 0,Ω + (cy,v) 0,Ω = (u,v) 0,Ω, v V s, ( p, w) 0,Ω + (cp,w) 0,Ω = (y y d,w) 0,Ω + σ,w, w Vr, p + α(u u d ) = 0, σ,y ψ = 0.
102 Proof. The reduced problem can be written in unconstrained form as inf Ĵ(v) := J red (v) + (I K G)(u) v L 2 (Ω) where I K stands for the indicator function of the constraint set K. The Slater condition and and subdifferential calculus tell us ( ) I K G (u) = G I K (Gu). The optimality condition then reads 0 Ĵ(u) = J red (u) + G I K (Gu). Hence, there exists σ I K (Gu) such that ( ) G (Gu y d + σ) +α(u u }{{} d ),v = 0, v 0,Ω L2 (Ω). =: p Since σ M(Ω), PDE regularity theory implies p W 1,s (Ω),1/s + 1/r = 1.
103 Finite Element Approximation Let T l (Ω) be a simplicial triangulation of Ω and let V l := { v l C(Ω) v l T P 1 (T), T T l (Ω), v l ΓD = 0 } be the FE space of continuous, piecewise linear functions. Let u d l V l be some approximation of ud, and let ψ l be the V l -interpoland of ψ. Consider the following FE Approximation of the state constrained control problem Minimize J l (y l,u l ) := 1 2 y l yd 2 0,Ω + α 2 u l ud l 2 0,Ω, over (y l,u l ) V l V l, subject to ( y l, v l ) 0,Ω + (cy l,v l ) 0,Ω = (u l,v l ) 0,Ω, v l V l, y l K l := {v l V l v l (x) ψ l (x), x Ω}. Since the constraints are point constraints associated with the nodal points, the discrete multipliers are chosen from M l := {µ l M(Ω) µ l = a N l (Ω Γ N ) κ a δ a, κ a lr}.
104 Representation of the Error in the Quantity of Interest
105 Primal-Dual Weighted Error Representation I We set X := V r L 2 (Ω) V s as well as X l := V l V l V l and introduce the Lagrangians L : X M(Ω) lr as well as L l : X l M l lr according to L(x, σ) := J(y,u) + ( y, p) 0,Ω (u,p) 0,Ω + σ,y ψ, L l (x l, σ l ) := J l (y l,u l ) + ( y l, p l ) 0,Ω (u l,p l ) 0,Ω + σ l,y l ψ l, where x := (y,u,p) and x l := (y l,u l,p l ). Then, the optimality conditions can be stated as x L(x, σ)(ϕ) = 0, ϕ X, x L l (x l, σ l )(ϕ l ) = 0, ϕ l X l.
106 Primal-Dual Weighted Error Representation II Theorem. Let (x, σ) X and (x l, σ l ) X l be the solutions of the continuous and discrete optimality systems, respectively. Then, there holds J(y,u) J l (y l,u l ) = 1 2 xxl(x l x,x l x) + σ,y l ψ + osc (1) l, where the data oscillations osc (1) l are given by osc (1) l := osc (1) T T l (Ω) T, osc (1) T := (y l y d l,yd l yd ) 0,T yd y d l 2 0,T + α (u l u d l,ud l ud ) 0,T + α 2 ud u d l 2 0,T. Remark: In the unconstrained case, i.e., σ = σ l = 0, the above result reduces to the error representation in [Becker, Kapp, and Rannacher (2000)].
107 Interpolation Operators (State Constraints) We introduce interpolation operators i y l : V r V l, r > r > 2, i p l : V s V l, 0 < s < s < 2, such that for all y V r and p V s there holds ( ( ( h r(t 1) T i y l y y r t,r,t h r T iy l y y r 0,r,T + h r/2 T h s T ip l p p s 0,s,T + h s/2 T where D T := {T T l (Ω) N l (T ) N l (T) }. ) 1/r y 1,r,DT, 0 t 1, i y l y y r 0,r, T i p l p p s 0,s, T ) 1/r y 1,r,DT, ) 1/s h T p 1,s,DT, 1
108 Primal-Dual Weighted Error Representation III Theorem. Under the assumptions of the previous Theorem let i z l,z {y,p}, be the interpolation operators introduced before. Then, there holds J(y,u) J l (y l,u l ) = (r(i y l y y) + r(ip l p p)) + µ l (x, σ) + osc(1) l where r(i y l y y) and r(ip l p p) stand for the primal-dual weighted residuals + osc (2) l, r(i y l y y) := 1 2 ((y l yd l,iy l y y) 0,Ω + ( (i y l y y, p l ) 0,Ω + σ l,i y l y y ), r(i p l p p) := 1 2 (( (ip l p p, y l ) 0,Ω (u l,i p l p p) 0,Ω). Moreover, µ l (x, σ) represents the primal-dual mismatch in complementarity and osc (2) l osc (2) l are further oscillation terms := µ l (x, σ) := 1 2 ( σ,y l ψ + σ l, ψ l y ), T T l (Ω) osc (2) T, osc (2) T := 1 2 ((yd y d l,y l y) 0,T + α (u d u d l,u l u) 0,T).
109 Primal-Dual Weighted Residuals
110 Primal-Dual Weighted Residuals Theorem. The primal-dual residuals can be estimated according to r(i y l y y) C ( ω y T ρy T + ωσ T ρ σ ) T, r(i p l p p) C ω p T ρp T. T T l (Ω) T T l (Ω) Here, ρ y T and ρp T are Lr -norms and L s -norms of the residuals associated with the state and the adjoint state equation ( ρ y T := u l r 0,r,T + h r/2 T 1 ) 1/r 2 ν [ y l ] r 0,r, T, ( ρ p T := y l y l d s 0,s,T + h s/2 T 1 ) 1/s 2 ν [ p l ] s 0,s, T. The corresponding dual weights ω y T and ωp T are given by ( ) 1/s ω y T := i p l p p s 0,s,T + h s/2 T ip l p p s 0,s, T, ( ) 1/r ω p T := i y l y y r 0,r,T + h r/2 T iy l y y r 0,r, T. The residual ρ σ T and its dual weight ωσ T are given by ρ σ T := n 1 a κ a, ω σ T := i y l y y 2/r+ε,r,T, 0 < ε < (r 2)/r. a N l (T)
111 Primal-Dual Mismatch in Complementarity
112 Primal-Dual Mismatch in Complementarity The primal-dual mismatch µ l (x, σ) can be made partially a posteriori in the following two particular cases (cf. [Bergounioux/Kunisch (2003)]): Regular Case Nonregular Case The active set A is the union of a finite num- The active set A is a Lipschitzian curve ber of mutually disjoint, connected sets A i, that divides Ω into two connected com- 1 i m, with C 1,1 -boundary. ponents Ω + and Ω. p I H 2 (I), p int(a) H 2 (int(a)) ( p, w) 0,Ω = (y d y,w) σ,w, w V r p = y d y in I, p = α ψ in A { 0 on I σ A = y d ψ α 2 ψ on A σ = σ A + σ F, σ F = p I ν I + α ψ ν A σ = σ A := ν A p A+ ν A p A
113 Primal-Dual Mismatch in Complementarity The primal-dual mismatch in complementarity has the representations µ l I Il = 1 2 (σ F,y l ψ) 0,F Il µ l I Al = 1 2 (σ F, ψ l ψ) 0,F Al a N l (F l I) a N l (I A l ) κ a (y l y)(a), κ a (ψ l y)(a), µ l A Il = 1 2 (σ F,y l ψ) 0,F Il (yd ψ α 2 ψ,y l ψ) 0,A Il, µ l A Al = 1 2 (σ F, ψ l ψ) 0,F Al (yd ψ α 2 ψ, ψ l ψ) 0,A Al. Hence, we need appropriate approximations of the continuous coincidence set A, the continuous non-coincidence set I, the continuous free boundary F, and of σ F.
114 Primal-Dual Mismatch in Complementarity (State Constraints) The coincidence set A and the non-coincidence set I will be approximated by  l := {T T l χ A l (x) 1 κh for all x T}, where Î l := {T T l χ A l (x) 1 κh for some x T}, χ A l := I ψ i y l y l γh r + ψ i y l y l, 0 < γ 1, r > 0. Note that for T A we have ( ) χ(a) χ A l 0,T min T 1/2, γ 1 h r y i y l y 0,T 0 for y i y l y 0,T = O(h q ), q > r. Moreover, σ F will be approximated by σ ˆF l := { νîl p l Îl + α νâl ψ, E T l (Â) T l (Î) νâl p l Âl,+ νâl p l Âl,, E E l (Â) \ ( T l (Â) T l (Î)).
115 Primal-Dual Mismatch in Complementarity (State Constraints) The primal-dual mismatch in complementarity can be estimated from above as follows: µ l I Il ˆµ (1) l + ˆµ(2) l, µ l I A l ˆµ (1) l + ˆµ(3) l, µ l A I l ˆµ (1) l + ˆµ(4) l, µ l A A l ˆµ (1) l + ˆµ(5) l. where ˆµ (1) := ˆµ (1) l E, ˆµ (1) E := 1 2 σ ˆF l 0,E y l ψ 0,E, ˆµ (2) l := ˆµ (3) l := ˆµ (4) l := ˆµ (5) l := E E l ( ˆF l ) E E l (F l Î l ) T T l (Î l A l ) T T l ( l I l ) T T l ( l A l ) ˆµ (2) E, ˆµ (2) E := 1 2 ˆµ (3) T, ˆµ (3) T := 1 2 a N l (E) a N l (T) (y l i y l y l )(a) κ a, y l i y l y l )(a) κ a,, ˆµ (4) T, ˆµ (4) T := 1 2 yd ψ α 2 ψ 0,T y l ψ 0,T, ˆµ (5) T, ˆµ (5) T := 1 2 yd ψ α 2 ψ 0,T ψ l ψ 0,T.
116 Primal-Dual Weighted Data Oscillations
117 Primal-Dual Weighted Data Oscillations The data oscillations osc (2) l := osc (2) l T T l (Ω) as given by osc (2) T, osc (2) T := 1 2 ( ) (y d y l d,y l y) 0,T + α (u d u d l,u l u) 0,T can be estimated from above according to osc (2) ôsc (2) l T, ôsc (2) T := ˆωp T ud u d l 0,T + ˆω y T yd y l d 0,T + α u d u d l 2 0,T, T T l (Ω), where the weights ˆω p T and ˆωy T are given by ˆω p T := ip l p l p l 0,T, ˆω y T := iy l y l y l 0,T.
118 State Constraints: Numerical Results
119 Numerical Results: Distributed Control Problem with State Constraints I Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u ud 2 0,Ω over (y,u) H 1 0(Ω) L 2 (Ω) subject to y = u in Ω, y K := {v H 1 0(Ω) v ψ a.e. in Ω} Data: Ω := ( 2, +2) 2, y d (r) := y(r) + p(r) + σ(r), u d (r) := u(r) + α 1 p(r), ψ := 0, α := 0.1, where y(r),u(r),p(r), σ(r) is the solution of the problem: y(r) := r 4/3 + γ 1 (r), u(r) = y(r), p(r) = γ 2 (r) + r r r2, σ(r) :=, γ 1 := γ 2 := 1, r < (r 0.25) (r 0.25) 4 80(r 0.25) 3 + 1, 0.25 < r < , otherwise { 1, r < , otherwise. { 0.0, r < , otherwise,
120 Numerical Results: Distributed Control Problem with State Constraints I Optimal state (left) and optimal control (right)
121 Numerical Results: Distributed Control Problem with State Constraints I 10 3 J(y *,u * ) - J h (y * h,u* h ) θ = 0.3 uniform Decrease in the quantity of interest versus total number of DOFs N
122 Numerical Results: Distributed Control Problem with State Constraints II Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u ud 2 0,Ω over (y,u) H 1 (Ω) L 2 (Ω) subject to y + cy = u in Ω, y K := {v H 1 (Ω) v ψ a.e. in Ω} Data: Ω = B(0,1) := {x = (x 1,x 2 ) T x x 2 2 < 1}, y d (r) := π 1 4π r π ln(r), u d (r) := π r2 1 ln(r), ψ := 4 + r, α := 1. 2π The solution y(r),u(r),p(r), σ(r) of the problem is given by y(r) 4, u(r) 4, p(r) = 1 4π r2 1 2π ln(r), σ(r) = δ 0.
123 Numerical Results: Distributed Control Problem with State Constraints II Optimal state (left) and optimal control (right)
124 Numerical Results: Distributed Control Problem with State Constraints II Optimal adjoint state (left) and mesh after 16 adaptive loops (right)
125 Numerical Results: Distributed Control Problem with State Constraints II θ = 0.3 uniform J(y *,u * ) - J h (y * h,u* h ) Decrease in the quantity of interest versus total number of DOFs N
126 Control Constrained Elliptic Control Problems
127 A Posteriori Error Analysis of AFEM for Optimal Control Problems (i) Unconstrained problems R. Becker, H. Kapp, R. Rannacher (2000) R. Becker, R. Rannacher (2001) (ii) Control constrained problems W. Liu and N. Yan (2000/01) R. Li, W. Liu, H. Ma, and T. Tang (2002) M. Hintermüller/H. et al. (2006) A. Gaevskaya/H. et al. (2006/07) A. Gaevskaya/H. and S. Repin (2006/07) M. Hintermüller/H. (2007) B. Vexler and W. Wollner (2007)
128 Model Problem (Distributed Elliptic Control Problem with Control Constraints) Given a bounded domain Ω R 2 with polygonal boundary Γ = Ω, a function y d, ψ L 2 (Ω), and α > 0, consider the distributed optimal control problem Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u 2 0,Ω, over (y,u) H 1 0(Ω) L 2 (Ω), subject to y = u, u K := {v L 2 (Ω) v ψ a.e. in Ω}. 1
129 Optimality Conditions for the Distributed Control Problem There exists an adjoint state p H 1 0(Ω) and an adjoint control σ L 2 (Ω) such that the quadruple (y, p, u, σ) satisfies a(y,v) = (u,v) 0,Ω, v H1 0(Ω), a(p,v) = (y d y,v) 0,Ω, v H1 0(Ω), α u = p σ, σ 0, u ψ, (σ;u ψ) 0,Ω = 0, where a(, ) stands for the bilinear form a(w, z) = w z dx, w,z H 1 0(Ω). Ω 1
130 Finite Element Approximation of the Distributed Control Problem Let T l (Ω) be a shape regular, simplicial triangulation of Ω and let V l := { v l C(Ω) v l T P k1 (T), T T l (Ω), k 1 N, v H Ω = 0 } be the FE space of continuous, piecewise polynomial functions (of degree k 1 ) and W l := { w l L 2 (Ω) w l T P k2 (T), T T l (Ω), k 2 N {0} } the linear space of elementwise polynomial functions (of degree k 2 ). Consider the following FE Approximation of the distributed control problem Minimize J l (y l,u l ) := 1 2 y l yd l 2 0,Ω + α 2 u l 2 0,Ω, over (y l,u l ) V l W l, subject to a(y l,v l ) = (u l,v l ) 0,Ω, v l V l, u l K l := {w l W l w l T ψ l T, T T l (Ω)}. where ψ l W l is the discrete control constraint. 1
131 Optimality Conditions for the FE Discretized Control Problem There exists an adjoint state p l V l and an adjoint control σ l W l such that the quadruple (y l,u l,p l, σ l ) satisfies a(y l,v l ) = (u l,v l ) 0,Ω, v l V l, a(p l,v l ) = (y d l y,v l ) 0,Ω, v l V l, α u l = M l p l σ l, σ l 0, u l ψ l, (σ l,u l ψ l ) 0,Ω = 0, where y d l V l and M l : V l W l, e.g., for k 2 = 0: (M l v l ) T := T 1 v l dx, T T l (Ω). T 1
132 Primal-Dual Weighted Error Representation (Control Constraints) Theorem. Let (x, σ) X L 2 (Ω) and (x l, σ l ) X l W l be the solutions of the continuous and discrete optimality systems, respectively. Then, there holds J(y,u) J l (y l,u l ) = 1 2 xxl(x l x,x l x) + (σ,u l ψ) 0,Ω + osc(1) l. Remark: In the unconstrained case, i.e., σ = σ l = 0, the above result reduces to the error representation in [Becker, Kapp, and Rannacher (2000)].
133 Primal-Dual Weighted Error Representation (Control Constraints) Theorem. Under the assumptions of the previous Theorem let i z l,z {y,u,p}, be the interpolation operators introduced before. Then, there holds ) J(y,u) J l (y l,u l ) = (r(i y l y y) + r(ip l p p) + r(iu l u u) + µ l (x, σ) + osc (1) l + osc (2) l, where r(i y l y y), r(ip l p p) and r(iu l u u) stand for the primal-dual weighted residuals r(i y l y y) := 1 ( ) (y 2 l y l d,iy l y y) 0,Ω + ( (i y l y y), p l ) 0,Ω, r(i p l p p) := 1 ( ) ( (i p 2 l p p), y l ) 0,Ω (u l,i p l p p) 0,Ω, r(i u l u u) := 1 2 (M l p l p l,iu l u u) 0,Ω. Moreover, µ l (x, σ) represents the primal-dual mismatch in complementarity µ l (x, σ) := 1 ( ) (σ,u 2 l ψ) 0,Ω + (σ l, ψ l u) 0,Ω, and osc (2) l is a further oscillation term osc (2) := osc (2) l T, osc (2) T := 1 2 (yd y l d,y l y) 0,T. T T l (Ω)
134 Primal-Dual Weighted Residuals (Control Constraints) Theorem. The primal-dual residuals can be estimated according to r(i y l y y) C ω y T ρy T, r(i p l p p) C ( ) ω p T ρp,1 T + ω u Tρ p,2 T. T T l (Ω) T T l (Ω) Here, ρ y T and ρp,1 T are L2 -norms of ( the residuals associated with the ) state and the adjoint state 1/2 ρ y T := u l 2 0,T + h 1 T 1 2 ν [ y l ] 2 0, T, ( ) 1/2 ρ p,1 T := y l y l d 2 0,T + h 1 T 1 2 ν [ p l ] 2 0, T. The corresponding dual weights ω u T and ωp T are given by ( ) 1/2 ω y T := i p l p p 2 0,T + h T i p l p p 2 0, T, ( ) 1/2 ω p T := i y l y y 2 0,T + h T i y l y y 2 0, T. The residual ρ p,2 T and its dual weight ωu T are given by ρ p,2 T := M l p l p l 0,T, ω u T := i u l u u 0,T.
135 Primal-Dual Mismatch in Complementarity (Control Constraints) Using the complementarity conditions u ψ, σ 0, (σ,u ψ) 0,Ω = 0, αu p + σ = 0, u l ψ l, σ l 0, (σ l,u l ψ l ) 0,Ω = 0, αu l M l p l + σ l = 0, the primal-dual mismatch µ l := µ l (x, σ) can be further assessed according to µ l (I I l ) = 0, µ l (A A l ) = 1 2 (σ + σ l, ψ l ψ) 0,A A l, µ l (I A l ) = 1 2 (σ l, ψ l α 1 p) 0,I Al, µ l (A I l ) = α 2 u u l 2 0,I A l (p M l p l,u l u) 0,I A l. and we finally obtain µ l (I A l ) + µ l (A I l ) ν l with a fully computable a posteriori term ν l (consistency error).
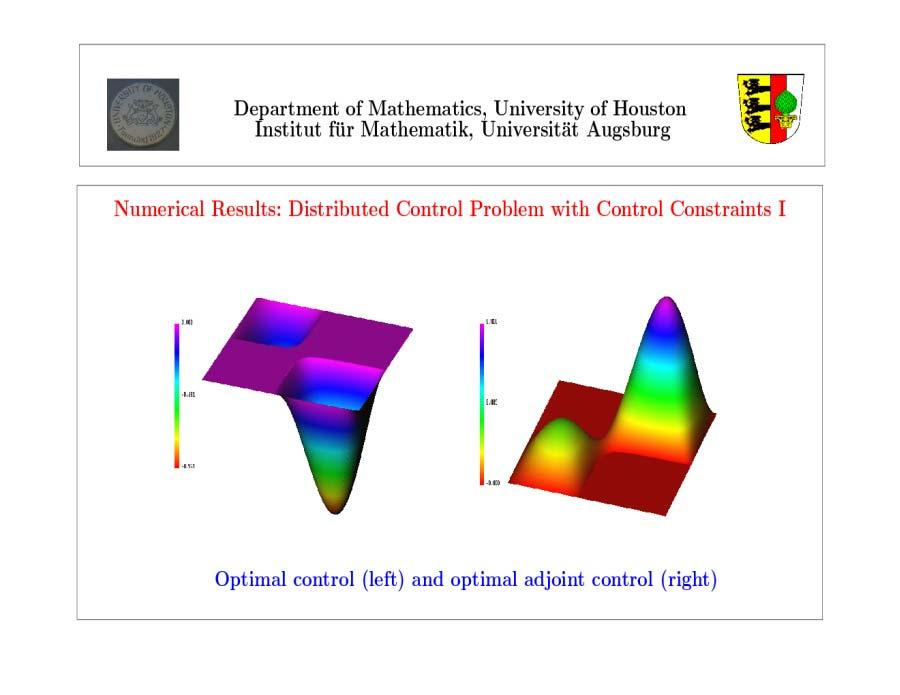
136 Numerical Results: Distributed Control Problem with Control Constraints I Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u 2 0,Ω over (y,u) H 1 0(Ω) L 2 (Ω) subject to y = u in Ω, u K := {v L 2 (Ω) v ψ a.e. in Ω} Data: Ω := (0,1) 2, { y d 200 x := 1 x 2 (x 1 0.5) 2 (1 x 2 ), 0 x (x 1 1) (x 2 (x 1 0.5) 2 (1 x 2 ), 0.5 < x 1 1, α = 0.01, ψ = 1.
 and optimal control")
137 Numerical Results: Distributed Control Problem with Control Constraints I Optimal state (left) and optimal control (right)
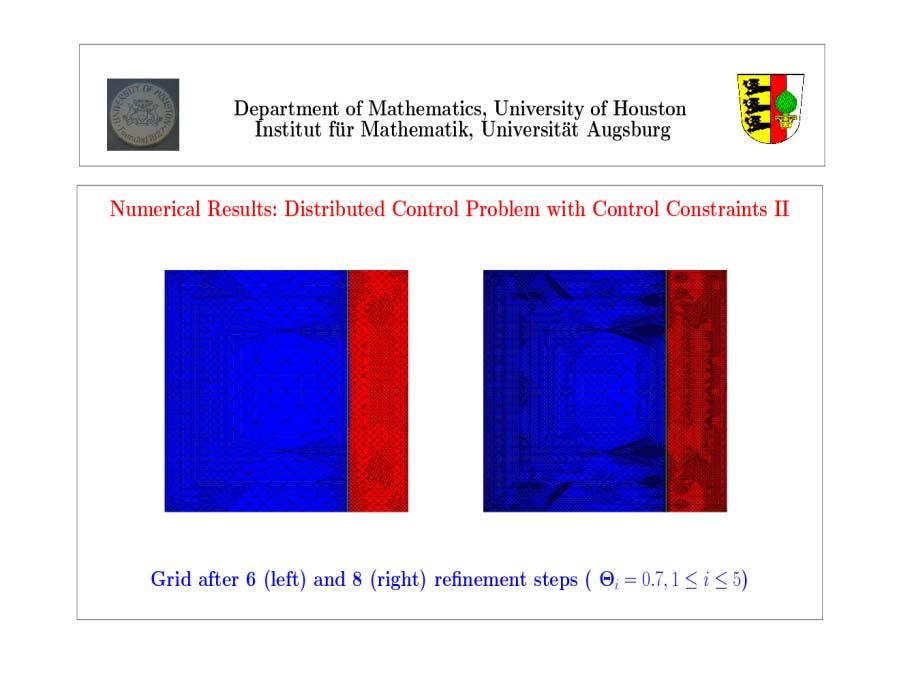
138 Numerical Results: Distributed Control Problem with Control Constraints I Grid after 6 (left) and 10 (right) refinement steps
139 Numerical Results: Distributed Control Problem with Control Constraints I l N dof δ h η h osc h ν h E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E-09 Error (quantity of interest), estimator, oscillations, and consistency error
140 Numerical Results: Distributed Control Problem with Control Constraints II Minimize J(y,u) := 1 2 y yd 2 0,Ω + α 2 u ud 2 0,Ω over (y,u) H 1 0(Ω) L 2 (Ω) subject to y = f + u in Ω, u K := {v L 2 (Ω) v ψ a.e. in Ω} Data: Ω := (0,1) 2, y d := 0, u d := û + α 1 (ˆσ 2 û), { (x1 0.5) ψ := 8, (x 1,x 2 ) Ω 1, (x 1 0.5) 2, α := 0.1, f := 0, otherwise { { ψ, (x û := 1,x 2 ) Ω 1 Ω 2, 2.25 (x1 0.75) 10, ˆσ := 4, (x 1,x 2 ) Ω 2, 1.01 ψ, otherwise 0, otherwise ( ) 1/2 Ω 1 := {(x 1,x 2 ) Ω (x 1 0.5) 2 + (x 2 0.5) }, Ω2 := {(x 1,x 2 ) Ω x }.,

 and optimal control")
141 Numerical Results: Distributed Control Problem with Control Constraints II Optimal state (left) and optimal control (right)
142 Numerical Results: Distributed Control Problem with Control Constraints II Grid after 6 (left) and 10 (right) refinement steps
143 Numerical Results: Distributed Control Problem with Control Constraints I l N dof δ h η h osc h ν h E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E E-16 Error (quantity of interest), estimator, oscillations, and consistency error
144 Numerical Results: Distributed Control Problem with Control Constraints II Decrease in the quantity of interest versus total number of DOFs
Basic Concepts of Adaptive Finite Element Methods for Elliptic Boundary Value Problems
 Department of Mathematics, University of Houston Basic Concepts of Adaptive Finite Element Methods for Elliptic Boundary Value Problems Ronald H.W. Hoppe 1,2 1 Department of Mathematics, University of
Department of Mathematics, University of Houston Basic Concepts of Adaptive Finite Element Methods for Elliptic Boundary Value Problems Ronald H.W. Hoppe 1,2 1 Department of Mathematics, University of
A POSTERIORI ERROR ESTIMATION OF FINITE ELEMENT APPROXIMATIONS OF POINTWISE STATE CONSTRAINED DISTRIBUTED CONTROL PROBLEMS
 A POSTERIORI ERROR ESTIMATION OF FINITE ELEMENT APPROXIMATIONS OF POINTWISE STATE CONSTRAINED DISTRIBUTED CONTROL PROBLEMS RONALD H.W. HOPPE AND MICHAEL KIEWEG Abstract. We provide an a posteriori error
A POSTERIORI ERROR ESTIMATION OF FINITE ELEMENT APPROXIMATIONS OF POINTWISE STATE CONSTRAINED DISTRIBUTED CONTROL PROBLEMS RONALD H.W. HOPPE AND MICHAEL KIEWEG Abstract. We provide an a posteriori error
Numerical Solution of Elliptic Optimal Control Problems
 Department of Mathematics, University of Houston Numerical Solution of Elliptic Optimal Control Problems Ronald H.W. Hoppe 1,2 1 Department of Mathematics, University of Houston 2 Institute of Mathematics,
Department of Mathematics, University of Houston Numerical Solution of Elliptic Optimal Control Problems Ronald H.W. Hoppe 1,2 1 Department of Mathematics, University of Houston 2 Institute of Mathematics,
Chapter 6 A posteriori error estimates for finite element approximations 6.1 Introduction
 Chapter 6 A posteriori error estimates for finite element approximations 6.1 Introduction The a posteriori error estimation of finite element approximations of elliptic boundary value problems has reached
Chapter 6 A posteriori error estimates for finite element approximations 6.1 Introduction The a posteriori error estimation of finite element approximations of elliptic boundary value problems has reached
A Posteriori Estimates for Cost Functionals of Optimal Control Problems
 A Posteriori Estimates for Cost Functionals of Optimal Control Problems Alexandra Gaevskaya, Ronald H.W. Hoppe,2 and Sergey Repin 3 Institute of Mathematics, Universität Augsburg, D-8659 Augsburg, Germany
A Posteriori Estimates for Cost Functionals of Optimal Control Problems Alexandra Gaevskaya, Ronald H.W. Hoppe,2 and Sergey Repin 3 Institute of Mathematics, Universität Augsburg, D-8659 Augsburg, Germany
Institut für Mathematik
 U n i v e r s i t ä t A u g s b u r g Institut für Mathematik Dietrich Braess, Carsten Carstensen, and Ronald H.W. Hoppe Convergence Analysis of a Conforming Adaptive Finite Element Method for an Obstacle
U n i v e r s i t ä t A u g s b u r g Institut für Mathematik Dietrich Braess, Carsten Carstensen, and Ronald H.W. Hoppe Convergence Analysis of a Conforming Adaptive Finite Element Method for an Obstacle
Adaptive methods for control problems with finite-dimensional control space
 Adaptive methods for control problems with finite-dimensional control space Saheed Akindeinde and Daniel Wachsmuth Johann Radon Institute for Computational and Applied Mathematics (RICAM) Austrian Academy
Adaptive methods for control problems with finite-dimensional control space Saheed Akindeinde and Daniel Wachsmuth Johann Radon Institute for Computational and Applied Mathematics (RICAM) Austrian Academy
Basic Concepts of Adaptive Finite Element Methods for Elliptic Boundary Value Problems
 Basic Concepts of Adaptive Finite lement Methods for lliptic Boundary Value Problems Ronald H.W. Hoppe 1,2 1 Department of Mathematics, University of Houston 2 Institute of Mathematics, University of Augsburg
Basic Concepts of Adaptive Finite lement Methods for lliptic Boundary Value Problems Ronald H.W. Hoppe 1,2 1 Department of Mathematics, University of Houston 2 Institute of Mathematics, University of Augsburg
Hamburger Beiträge zur Angewandten Mathematik
 Hamburger Beiträge zur Angewandten Mathematik Numerical analysis of a control and state constrained elliptic control problem with piecewise constant control approximations Klaus Deckelnick and Michael
Hamburger Beiträge zur Angewandten Mathematik Numerical analysis of a control and state constrained elliptic control problem with piecewise constant control approximations Klaus Deckelnick and Michael
A-posteriori error estimates for optimal control problems with state and control constraints
 www.oeaw.ac.at A-posteriori error estimates for optimal control problems with state and control constraints A. Rösch, D. Wachsmuth RICAM-Report 2010-08 www.ricam.oeaw.ac.at A-POSTERIORI ERROR ESTIMATES
www.oeaw.ac.at A-posteriori error estimates for optimal control problems with state and control constraints A. Rösch, D. Wachsmuth RICAM-Report 2010-08 www.ricam.oeaw.ac.at A-POSTERIORI ERROR ESTIMATES
Convergence of a finite element approximation to a state constrained elliptic control problem
 Als Manuskript gedruckt Technische Universität Dresden Herausgeber: Der Rektor Convergence of a finite element approximation to a state constrained elliptic control problem Klaus Deckelnick & Michael Hinze
Als Manuskript gedruckt Technische Universität Dresden Herausgeber: Der Rektor Convergence of a finite element approximation to a state constrained elliptic control problem Klaus Deckelnick & Michael Hinze
Hamburger Beiträge zur Angewandten Mathematik
 Hamburger Beiträge zur Angewandten Mathematik A finite element approximation to elliptic control problems in the presence of control and state constraints Klaus Deckelnick and Michael Hinze Nr. 2007-0
Hamburger Beiträge zur Angewandten Mathematik A finite element approximation to elliptic control problems in the presence of control and state constraints Klaus Deckelnick and Michael Hinze Nr. 2007-0
SUPERCONVERGENCE PROPERTIES FOR OPTIMAL CONTROL PROBLEMS DISCRETIZED BY PIECEWISE LINEAR AND DISCONTINUOUS FUNCTIONS
 SUPERCONVERGENCE PROPERTIES FOR OPTIMAL CONTROL PROBLEMS DISCRETIZED BY PIECEWISE LINEAR AND DISCONTINUOUS FUNCTIONS A. RÖSCH AND R. SIMON Abstract. An optimal control problem for an elliptic equation
SUPERCONVERGENCE PROPERTIES FOR OPTIMAL CONTROL PROBLEMS DISCRETIZED BY PIECEWISE LINEAR AND DISCONTINUOUS FUNCTIONS A. RÖSCH AND R. SIMON Abstract. An optimal control problem for an elliptic equation
K. Krumbiegel I. Neitzel A. Rösch
 SUFFICIENT OPTIMALITY CONDITIONS FOR THE MOREAU-YOSIDA-TYPE REGULARIZATION CONCEPT APPLIED TO SEMILINEAR ELLIPTIC OPTIMAL CONTROL PROBLEMS WITH POINTWISE STATE CONSTRAINTS K. Krumbiegel I. Neitzel A. Rösch
SUFFICIENT OPTIMALITY CONDITIONS FOR THE MOREAU-YOSIDA-TYPE REGULARIZATION CONCEPT APPLIED TO SEMILINEAR ELLIPTIC OPTIMAL CONTROL PROBLEMS WITH POINTWISE STATE CONSTRAINTS K. Krumbiegel I. Neitzel A. Rösch
ADAPTIVE MULTILEVEL CORRECTION METHOD FOR FINITE ELEMENT APPROXIMATIONS OF ELLIPTIC OPTIMAL CONTROL PROBLEMS
 ADAPTIVE MULTILEVEL CORRECTION METHOD FOR FINITE ELEMENT APPROXIMATIONS OF ELLIPTIC OPTIMAL CONTROL PROBLEMS WEI GONG, HEHU XIE, AND NINGNING YAN Abstract: In this paper we propose an adaptive multilevel
ADAPTIVE MULTILEVEL CORRECTION METHOD FOR FINITE ELEMENT APPROXIMATIONS OF ELLIPTIC OPTIMAL CONTROL PROBLEMS WEI GONG, HEHU XIE, AND NINGNING YAN Abstract: In this paper we propose an adaptive multilevel
Institut für Mathematik
 U n i v e r s i t ä t A u g s b u r g Institut für Matematik Micael Hintermüller, Ronald H.W. Hoppe Goal-Oriented Adaptivity in Pointwise State Constrained Optimal Control of Partial Differential Equations
U n i v e r s i t ä t A u g s b u r g Institut für Matematik Micael Hintermüller, Ronald H.W. Hoppe Goal-Oriented Adaptivity in Pointwise State Constrained Optimal Control of Partial Differential Equations
Institut für Mathematik
 U n i v e r s i t ä t A u g s b u r g Institut für Mathematik Ronald H.W. Hoppe, Irwin Yousept Adaptive Edge Element Approximation of H(curl-Elliptic Optimal Control Problems with Control Constraints Preprint
U n i v e r s i t ä t A u g s b u r g Institut für Mathematik Ronald H.W. Hoppe, Irwin Yousept Adaptive Edge Element Approximation of H(curl-Elliptic Optimal Control Problems with Control Constraints Preprint
Priority Program 1253
 Deutsche Forschungsgemeinschaft Priority Program 1253 Optimization with Partial Differential Equations Klaus Deckelnick and Michael Hinze A note on the approximation of elliptic control problems with bang-bang
Deutsche Forschungsgemeinschaft Priority Program 1253 Optimization with Partial Differential Equations Klaus Deckelnick and Michael Hinze A note on the approximation of elliptic control problems with bang-bang
Numerical Analysis of State-Constrained Optimal Control Problems for PDEs
 Numerical Analysis of State-Constrained Optimal Control Problems for PDEs Ira Neitzel and Fredi Tröltzsch Abstract. We survey the results of SPP 1253 project Numerical Analysis of State-Constrained Optimal
Numerical Analysis of State-Constrained Optimal Control Problems for PDEs Ira Neitzel and Fredi Tröltzsch Abstract. We survey the results of SPP 1253 project Numerical Analysis of State-Constrained Optimal
Robust error estimates for regularization and discretization of bang-bang control problems
 Robust error estimates for regularization and discretization of bang-bang control problems Daniel Wachsmuth September 2, 205 Abstract We investigate the simultaneous regularization and discretization of
Robust error estimates for regularization and discretization of bang-bang control problems Daniel Wachsmuth September 2, 205 Abstract We investigate the simultaneous regularization and discretization of
Adaptive Space-Time Finite Element Approximations of Parabolic Optimal Control Problems. Dissertation
 Adaptive Space-Time Finite Element Approximations of Parabolic Optimal Control Problems Dissertation zur Erlangung des akademischen Titels eines Doktors der Naturwissenschaften der Mathematisch-Naturwissenschaftlichen
Adaptive Space-Time Finite Element Approximations of Parabolic Optimal Control Problems Dissertation zur Erlangung des akademischen Titels eines Doktors der Naturwissenschaften der Mathematisch-Naturwissenschaftlichen
An optimal control problem for a parabolic PDE with control constraints
 An optimal control problem for a parabolic PDE with control constraints PhD Summer School on Reduced Basis Methods, Ulm Martin Gubisch University of Konstanz October 7 Martin Gubisch (University of Konstanz)
An optimal control problem for a parabolic PDE with control constraints PhD Summer School on Reduced Basis Methods, Ulm Martin Gubisch University of Konstanz October 7 Martin Gubisch (University of Konstanz)
REGULAR LAGRANGE MULTIPLIERS FOR CONTROL PROBLEMS WITH MIXED POINTWISE CONTROL-STATE CONSTRAINTS
 REGULAR LAGRANGE MULTIPLIERS FOR CONTROL PROBLEMS WITH MIXED POINTWISE CONTROL-STATE CONSTRAINTS fredi tröltzsch 1 Abstract. A class of quadratic optimization problems in Hilbert spaces is considered,
REGULAR LAGRANGE MULTIPLIERS FOR CONTROL PROBLEMS WITH MIXED POINTWISE CONTROL-STATE CONSTRAINTS fredi tröltzsch 1 Abstract. A class of quadratic optimization problems in Hilbert spaces is considered,
Bang bang control of elliptic and parabolic PDEs
 1/26 Bang bang control of elliptic and parabolic PDEs Michael Hinze (joint work with Nikolaus von Daniels & Klaus Deckelnick) Jackson, July 24, 2018 2/26 Model problem (P) min J(y, u) = 1 u U ad,y Y ad
1/26 Bang bang control of elliptic and parabolic PDEs Michael Hinze (joint work with Nikolaus von Daniels & Klaus Deckelnick) Jackson, July 24, 2018 2/26 Model problem (P) min J(y, u) = 1 u U ad,y Y ad
A posteriori error control for the binary Mumford Shah model
 A posteriori error control for the binary Mumford Shah model Benjamin Berkels 1, Alexander Effland 2, Martin Rumpf 2 1 AICES Graduate School, RWTH Aachen University, Germany 2 Institute for Numerical Simulation,
A posteriori error control for the binary Mumford Shah model Benjamin Berkels 1, Alexander Effland 2, Martin Rumpf 2 1 AICES Graduate School, RWTH Aachen University, Germany 2 Institute for Numerical Simulation,
ELLIPTIC RECONSTRUCTION AND A POSTERIORI ERROR ESTIMATES FOR PARABOLIC PROBLEMS
 ELLIPTIC RECONSTRUCTION AND A POSTERIORI ERROR ESTIMATES FOR PARABOLIC PROBLEMS CHARALAMBOS MAKRIDAKIS AND RICARDO H. NOCHETTO Abstract. It is known that the energy technique for a posteriori error analysis
ELLIPTIC RECONSTRUCTION AND A POSTERIORI ERROR ESTIMATES FOR PARABOLIC PROBLEMS CHARALAMBOS MAKRIDAKIS AND RICARDO H. NOCHETTO Abstract. It is known that the energy technique for a posteriori error analysis
Inexact Algorithms in Function Space and Adaptivity
 Inexact Algorithms in Function Space and Adaptivity Anton Schiela adaptive discretization nonlinear solver Zuse Institute Berlin linear solver Matheon project A1 ZIB: P. Deuflhard, M. Weiser TUB: F. Tröltzsch,
Inexact Algorithms in Function Space and Adaptivity Anton Schiela adaptive discretization nonlinear solver Zuse Institute Berlin linear solver Matheon project A1 ZIB: P. Deuflhard, M. Weiser TUB: F. Tröltzsch,
Proper Orthogonal Decomposition for Optimal Control Problems with Mixed Control-State Constraints
 Proper Orthogonal Decomposition for Optimal Control Problems with Mixed Control-State Constraints Technische Universität Berlin Martin Gubisch, Stefan Volkwein University of Konstanz March, 3 Martin Gubisch,
Proper Orthogonal Decomposition for Optimal Control Problems with Mixed Control-State Constraints Technische Universität Berlin Martin Gubisch, Stefan Volkwein University of Konstanz March, 3 Martin Gubisch,
Optimal control of partial differential equations with affine control constraints
 Control and Cybernetics vol. 38 (2009) No. 4A Optimal control of partial differential equations with affine control constraints by Juan Carlos De Los Reyes 1 and Karl Kunisch 2 1 Departmento de Matemática,
Control and Cybernetics vol. 38 (2009) No. 4A Optimal control of partial differential equations with affine control constraints by Juan Carlos De Los Reyes 1 and Karl Kunisch 2 1 Departmento de Matemática,
A posteriori error estimation of approximate boundary fluxes
 COMMUNICATIONS IN NUMERICAL METHODS IN ENGINEERING Commun. Numer. Meth. Engng 2008; 24:421 434 Published online 24 May 2007 in Wiley InterScience (www.interscience.wiley.com)..1014 A posteriori error estimation
COMMUNICATIONS IN NUMERICAL METHODS IN ENGINEERING Commun. Numer. Meth. Engng 2008; 24:421 434 Published online 24 May 2007 in Wiley InterScience (www.interscience.wiley.com)..1014 A posteriori error estimation
Pontryagin s Maximum Principle of Optimal Control Governed by A Convection Diffusion Equation
 Communications in Mathematics and Applications Volume 4 (213), Number 2, pp. 119 125 RGN Publications http://www.rgnpublications.com Pontryagin s Maximum Principle of Optimal Control Governed by A Convection
Communications in Mathematics and Applications Volume 4 (213), Number 2, pp. 119 125 RGN Publications http://www.rgnpublications.com Pontryagin s Maximum Principle of Optimal Control Governed by A Convection
A Priori Error Analysis for Space-Time Finite Element Discretization of Parabolic Optimal Control Problems
 A Priori Error Analysis for Space-Time Finite Element Discretization of Parabolic Optimal Control Problems D. Meidner and B. Vexler Abstract In this article we discuss a priori error estimates for Galerkin
A Priori Error Analysis for Space-Time Finite Element Discretization of Parabolic Optimal Control Problems D. Meidner and B. Vexler Abstract In this article we discuss a priori error estimates for Galerkin
Semismooth Newton Methods for an Optimal Boundary Control Problem of Wave Equations
 Semismooth Newton Methods for an Optimal Boundary Control Problem of Wave Equations Axel Kröner 1 Karl Kunisch 2 and Boris Vexler 3 1 Lehrstuhl für Mathematische Optimierung Technische Universität München
Semismooth Newton Methods for an Optimal Boundary Control Problem of Wave Equations Axel Kröner 1 Karl Kunisch 2 and Boris Vexler 3 1 Lehrstuhl für Mathematische Optimierung Technische Universität München
Key words. optimal control, heat equation, control constraints, state constraints, finite elements, a priori error estimates
 A PRIORI ERROR ESTIMATES FOR FINITE ELEMENT DISCRETIZATIONS OF PARABOLIC OPTIMIZATION PROBLEMS WITH POINTWISE STATE CONSTRAINTS IN TIME DOMINIK MEIDNER, ROLF RANNACHER, AND BORIS VEXLER Abstract. In this
A PRIORI ERROR ESTIMATES FOR FINITE ELEMENT DISCRETIZATIONS OF PARABOLIC OPTIMIZATION PROBLEMS WITH POINTWISE STATE CONSTRAINTS IN TIME DOMINIK MEIDNER, ROLF RANNACHER, AND BORIS VEXLER Abstract. In this
A posteriori error estimates applied to flow in a channel with corners
 Mathematics and Computers in Simulation 61 (2003) 375 383 A posteriori error estimates applied to flow in a channel with corners Pavel Burda a,, Jaroslav Novotný b, Bedřich Sousedík a a Department of Mathematics,
Mathematics and Computers in Simulation 61 (2003) 375 383 A posteriori error estimates applied to flow in a channel with corners Pavel Burda a,, Jaroslav Novotný b, Bedřich Sousedík a a Department of Mathematics,
A stabilized finite element method for the convection dominated diffusion optimal control problem
 Applicable Analysis An International Journal ISSN: 0003-6811 (Print) 1563-504X (Online) Journal homepage: http://www.tandfonline.com/loi/gapa20 A stabilized finite element method for the convection dominated
Applicable Analysis An International Journal ISSN: 0003-6811 (Print) 1563-504X (Online) Journal homepage: http://www.tandfonline.com/loi/gapa20 A stabilized finite element method for the convection dominated
EXISTENCE OF REGULAR LAGRANGE MULTIPLIERS FOR A NONLINEAR ELLIPTIC OPTIMAL CONTROL PROBLEM WITH POINTWISE CONTROL-STATE CONSTRAINTS
 EXISTENCE OF REGULAR LAGRANGE MULTIPLIERS FOR A NONLINEAR ELLIPTIC OPTIMAL CONTROL PROBLEM WITH POINTWISE CONTROL-STATE CONSTRAINTS A. RÖSCH AND F. TRÖLTZSCH Abstract. A class of optimal control problems
EXISTENCE OF REGULAR LAGRANGE MULTIPLIERS FOR A NONLINEAR ELLIPTIC OPTIMAL CONTROL PROBLEM WITH POINTWISE CONTROL-STATE CONSTRAINTS A. RÖSCH AND F. TRÖLTZSCH Abstract. A class of optimal control problems
Solving Distributed Optimal Control Problems for the Unsteady Burgers Equation in COMSOL Multiphysics
 Excerpt from the Proceedings of the COMSOL Conference 2009 Milan Solving Distributed Optimal Control Problems for the Unsteady Burgers Equation in COMSOL Multiphysics Fikriye Yılmaz 1, Bülent Karasözen
Excerpt from the Proceedings of the COMSOL Conference 2009 Milan Solving Distributed Optimal Control Problems for the Unsteady Burgers Equation in COMSOL Multiphysics Fikriye Yılmaz 1, Bülent Karasözen
Error estimates for the finite-element approximation of a semilinear elliptic control problem
 Error estimates for the finite-element approximation of a semilinear elliptic control problem by Eduardo Casas 1 and Fredi röltzsch 2 1 Departamento de Matemática Aplicada y Ciencias de la Computación
Error estimates for the finite-element approximation of a semilinear elliptic control problem by Eduardo Casas 1 and Fredi röltzsch 2 1 Departamento de Matemática Aplicada y Ciencias de la Computación
STATE-CONSTRAINED OPTIMAL CONTROL OF THE THREE-DIMENSIONAL STATIONARY NAVIER-STOKES EQUATIONS. 1. Introduction
 STATE-CONSTRAINED OPTIMAL CONTROL OF THE THREE-DIMENSIONAL STATIONARY NAVIER-STOKES EQUATIONS J. C. DE LOS REYES AND R. GRIESSE Abstract. In this paper, an optimal control problem for the stationary Navier-
STATE-CONSTRAINED OPTIMAL CONTROL OF THE THREE-DIMENSIONAL STATIONARY NAVIER-STOKES EQUATIONS J. C. DE LOS REYES AND R. GRIESSE Abstract. In this paper, an optimal control problem for the stationary Navier-
A GAGLIARDO NIRENBERG INEQUALITY, WITH APPLICATION TO DUALITY-BASED A POSTERIORI ESTIMATION IN THE L 1 NORM
 27 Kragujevac J. Math. 30 (2007 27 43. A GAGLIARDO NIRENBERG INEQUALITY, WITH APPLICATION TO DUALITY-BASED A POSTERIORI ESTIMATION IN THE L 1 NORM Endre Süli Oxford University Computing Laboratory, Wolfson
27 Kragujevac J. Math. 30 (2007 27 43. A GAGLIARDO NIRENBERG INEQUALITY, WITH APPLICATION TO DUALITY-BASED A POSTERIORI ESTIMATION IN THE L 1 NORM Endre Süli Oxford University Computing Laboratory, Wolfson
A Control Reduced Primal Interior Point Method for PDE Constrained Optimization 1
 Konrad-Zuse-Zentrum für Informationstechnik Berlin Takustraße 7 D-495 Berlin-Dahlem Germany MARTIN WEISER TOBIAS GÄNZLER ANTON SCHIELA A Control Reduced Primal Interior Point Method for PDE Constrained
Konrad-Zuse-Zentrum für Informationstechnik Berlin Takustraße 7 D-495 Berlin-Dahlem Germany MARTIN WEISER TOBIAS GÄNZLER ANTON SCHIELA A Control Reduced Primal Interior Point Method for PDE Constrained
Chapter 5 A priori error estimates for nonconforming finite element approximations 5.1 Strang s first lemma
 Chapter 5 A priori error estimates for nonconforming finite element approximations 51 Strang s first lemma We consider the variational equation (51 a(u, v = l(v, v V H 1 (Ω, and assume that the conditions
Chapter 5 A priori error estimates for nonconforming finite element approximations 51 Strang s first lemma We consider the variational equation (51 a(u, v = l(v, v V H 1 (Ω, and assume that the conditions
A Mesh-Independence Principle for Quadratic Penalties Applied to Semilinear Elliptic Boundary Control
 Schedae Informaticae Vol. 21 (2012): 9 26 doi: 10.4467/20838476SI.12.001.0811 A Mesh-Independence Principle for Quadratic Penalties Applied to Semilinear Elliptic Boundary Control Christian Grossmann 1,
Schedae Informaticae Vol. 21 (2012): 9 26 doi: 10.4467/20838476SI.12.001.0811 A Mesh-Independence Principle for Quadratic Penalties Applied to Semilinear Elliptic Boundary Control Christian Grossmann 1,
Affine covariant Semi-smooth Newton in function space
 Affine covariant Semi-smooth Newton in function space Anton Schiela March 14, 2018 These are lecture notes of my talks given for the Winter School Modern Methods in Nonsmooth Optimization that was held
Affine covariant Semi-smooth Newton in function space Anton Schiela March 14, 2018 These are lecture notes of my talks given for the Winter School Modern Methods in Nonsmooth Optimization that was held
arxiv: v1 [math.na] 17 Nov 2017 Received: date / Accepted: date
![arxiv: v1 [math.na] 17 Nov 2017 Received: date / Accepted: date](/thumbs/93/112108025.jpg "arxiv: v1 [math.na] 17 Nov 2017 Received: date / Accepted: date") Noname manuscript No. (will be inserted by the editor) Maximum norm a posteriori error estimates for an optimal control problem Alejandro Allendes Enrique Otárola Richard Rankin Abner J. algado arxiv:1711.06707v1
Noname manuscript No. (will be inserted by the editor) Maximum norm a posteriori error estimates for an optimal control problem Alejandro Allendes Enrique Otárola Richard Rankin Abner J. algado arxiv:1711.06707v1
Constrained Minimization and Multigrid
 Constrained Minimization and Multigrid C. Gräser (FU Berlin), R. Kornhuber (FU Berlin), and O. Sander (FU Berlin) Workshop on PDE Constrained Optimization Hamburg, March 27-29, 2008 Matheon Outline Successive
Constrained Minimization and Multigrid C. Gräser (FU Berlin), R. Kornhuber (FU Berlin), and O. Sander (FU Berlin) Workshop on PDE Constrained Optimization Hamburg, March 27-29, 2008 Matheon Outline Successive
OPTIMALITY CONDITIONS AND ERROR ANALYSIS OF SEMILINEAR ELLIPTIC CONTROL PROBLEMS WITH L 1 COST FUNCTIONAL
 OPTIMALITY CONDITIONS AND ERROR ANALYSIS OF SEMILINEAR ELLIPTIC CONTROL PROBLEMS WITH L 1 COST FUNCTIONAL EDUARDO CASAS, ROLAND HERZOG, AND GERD WACHSMUTH Abstract. Semilinear elliptic optimal control
OPTIMALITY CONDITIONS AND ERROR ANALYSIS OF SEMILINEAR ELLIPTIC CONTROL PROBLEMS WITH L 1 COST FUNCTIONAL EDUARDO CASAS, ROLAND HERZOG, AND GERD WACHSMUTH Abstract. Semilinear elliptic optimal control
Algorithms for PDE-Constrained Optimization
 GAMM-Mitteilungen, 31 January 2014 Algorithms for PDE-Constrained Optimization Roland Herzog 1 and Karl Kunisch 2 1 Chemnitz University of Technology, Faculty of Mathematics, Reichenhainer Straße 41, D
GAMM-Mitteilungen, 31 January 2014 Algorithms for PDE-Constrained Optimization Roland Herzog 1 and Karl Kunisch 2 1 Chemnitz University of Technology, Faculty of Mathematics, Reichenhainer Straße 41, D
Convergence and optimality of an adaptive FEM for controlling L 2 errors
 Convergence and optimality of an adaptive FEM for controlling L 2 errors Alan Demlow (University of Kentucky) joint work with Rob Stevenson (University of Amsterdam) Partially supported by NSF DMS-0713770.
Convergence and optimality of an adaptive FEM for controlling L 2 errors Alan Demlow (University of Kentucky) joint work with Rob Stevenson (University of Amsterdam) Partially supported by NSF DMS-0713770.
An a posteriori error analysis for distributed elliptic optimal control problems with pointwise state constraints
 An a posteriori error analysis for distributed elliptic optimal control problems with pointwise state constraints Dissertation zur Erlangung des akademischen Titels eines Doktors der Naturwissenschaften
An a posteriori error analysis for distributed elliptic optimal control problems with pointwise state constraints Dissertation zur Erlangung des akademischen Titels eines Doktors der Naturwissenschaften
Energy norm a-posteriori error estimation for divergence-free discontinuous Galerkin approximations of the Navier-Stokes equations
 INTRNATIONAL JOURNAL FOR NUMRICAL MTHODS IN FLUIDS Int. J. Numer. Meth. Fluids 19007; 1:1 [Version: 00/09/18 v1.01] nergy norm a-posteriori error estimation for divergence-free discontinuous Galerkin approximations
INTRNATIONAL JOURNAL FOR NUMRICAL MTHODS IN FLUIDS Int. J. Numer. Meth. Fluids 19007; 1:1 [Version: 00/09/18 v1.01] nergy norm a-posteriori error estimation for divergence-free discontinuous Galerkin approximations
Unified A Posteriori Error Control for all Nonstandard Finite Elements 1
 Unified A Posteriori Error Control for all Nonstandard Finite Elements 1 Martin Eigel C. Carstensen, C. Löbhard, R.H.W. Hoppe Humboldt-Universität zu Berlin 19.05.2010 1 we know of Guidelines for Applicants
Unified A Posteriori Error Control for all Nonstandard Finite Elements 1 Martin Eigel C. Carstensen, C. Löbhard, R.H.W. Hoppe Humboldt-Universität zu Berlin 19.05.2010 1 we know of Guidelines for Applicants
arxiv: v2 [math.na] 23 Apr 2016
![arxiv: v2 [math.na] 23 Apr 2016](/thumbs/89/98739617.jpg "arxiv: v2 [math.na] 23 Apr 2016") Improved ZZ A Posteriori Error Estimators for Diffusion Problems: Conforming Linear Elements arxiv:508.009v2 [math.na] 23 Apr 206 Zhiqiang Cai Cuiyu He Shun Zhang May 2, 208 Abstract. In [8], we introduced
Improved ZZ A Posteriori Error Estimators for Diffusion Problems: Conforming Linear Elements arxiv:508.009v2 [math.na] 23 Apr 206 Zhiqiang Cai Cuiyu He Shun Zhang May 2, 208 Abstract. In [8], we introduced
R T (u H )v + (2.1) J S (u H )v v V, T (2.2) (2.3) H S J S (u H ) 2 L 2 (S). S T
v + (2.1) J S (u H )v v V, T (2.2) (2.3) H S J S (u H ) 2 L 2 (S). S T") 2 R.H. NOCHETTO 2. Lecture 2. Adaptivity I: Design and Convergence of AFEM tarting with a conforming mesh T H, the adaptive procedure AFEM consists of loops of the form OLVE ETIMATE MARK REFINE to produce
2 R.H. NOCHETTO 2. Lecture 2. Adaptivity I: Design and Convergence of AFEM tarting with a conforming mesh T H, the adaptive procedure AFEM consists of loops of the form OLVE ETIMATE MARK REFINE to produce
LECTURE 3: DISCRETE GRADIENT FLOWS
 LECTURE 3: DISCRETE GRADIENT FLOWS Department of Mathematics and Institute for Physical Science and Technology University of Maryland, USA Tutorial: Numerical Methods for FBPs Free Boundary Problems and
LECTURE 3: DISCRETE GRADIENT FLOWS Department of Mathematics and Institute for Physical Science and Technology University of Maryland, USA Tutorial: Numerical Methods for FBPs Free Boundary Problems and
Maximum norm estimates for energy-corrected finite element method
 Maximum norm estimates for energy-corrected finite element method Piotr Swierczynski 1 and Barbara Wohlmuth 1 Technical University of Munich, Institute for Numerical Mathematics, piotr.swierczynski@ma.tum.de,
Maximum norm estimates for energy-corrected finite element method Piotr Swierczynski 1 and Barbara Wohlmuth 1 Technical University of Munich, Institute for Numerical Mathematics, piotr.swierczynski@ma.tum.de,
Chapter 1: The Finite Element Method
 Chapter 1: The Finite Element Method Michael Hanke Read: Strang, p 428 436 A Model Problem Mathematical Models, Analysis and Simulation, Part Applications: u = fx), < x < 1 u) = u1) = D) axial deformation
Chapter 1: The Finite Element Method Michael Hanke Read: Strang, p 428 436 A Model Problem Mathematical Models, Analysis and Simulation, Part Applications: u = fx), < x < 1 u) = u1) = D) axial deformation
PDE Constrained Optimization selected Proofs
 PDE Constrained Optimization selected Proofs Jeff Snider jeff@snider.com George Mason University Department of Mathematical Sciences April, 214 Outline 1 Prelim 2 Thms 3.9 3.11 3 Thm 3.12 4 Thm 3.13 5
PDE Constrained Optimization selected Proofs Jeff Snider jeff@snider.com George Mason University Department of Mathematical Sciences April, 214 Outline 1 Prelim 2 Thms 3.9 3.11 3 Thm 3.12 4 Thm 3.13 5
FINITE ELEMENT APPROXIMATION OF ELLIPTIC DIRICHLET OPTIMAL CONTROL PROBLEMS
 Numerical Functional Analysis and Optimization, 28(7 8):957 973, 2007 Copyright Taylor & Francis Group, LLC ISSN: 0163-0563 print/1532-2467 online DOI: 10.1080/01630560701493305 FINITE ELEMENT APPROXIMATION
Numerical Functional Analysis and Optimization, 28(7 8):957 973, 2007 Copyright Taylor & Francis Group, LLC ISSN: 0163-0563 print/1532-2467 online DOI: 10.1080/01630560701493305 FINITE ELEMENT APPROXIMATION
Chapter 3 Conforming Finite Element Methods 3.1 Foundations Ritz-Galerkin Method
 Chapter 3 Conforming Finite Element Methods 3.1 Foundations 3.1.1 Ritz-Galerkin Method Let V be a Hilbert space, a(, ) : V V lr a bounded, V-elliptic bilinear form and l : V lr a bounded linear functional.
Chapter 3 Conforming Finite Element Methods 3.1 Foundations 3.1.1 Ritz-Galerkin Method Let V be a Hilbert space, a(, ) : V V lr a bounded, V-elliptic bilinear form and l : V lr a bounded linear functional.
u = f in Ω, u = q on Γ. (1.2)
") ERROR ANALYSIS FOR A FINITE ELEMENT APPROXIMATION OF ELLIPTIC DIRICHLET BOUNDARY CONTROL PROBLEMS S. MAY, R. RANNACHER, AND B. VEXLER Abstract. We consider the Galerkin finite element approximation of
ERROR ANALYSIS FOR A FINITE ELEMENT APPROXIMATION OF ELLIPTIC DIRICHLET BOUNDARY CONTROL PROBLEMS S. MAY, R. RANNACHER, AND B. VEXLER Abstract. We consider the Galerkin finite element approximation of
Space-time Finite Element Methods for Parabolic Evolution Problems
 Space-time Finite Element Methods for Parabolic Evolution Problems with Variable Coefficients Ulrich Langer, Martin Neumüller, Andreas Schafelner Johannes Kepler University, Linz Doctoral Program Computational
Space-time Finite Element Methods for Parabolic Evolution Problems with Variable Coefficients Ulrich Langer, Martin Neumüller, Andreas Schafelner Johannes Kepler University, Linz Doctoral Program Computational
1.The anisotropic plate model
 Pré-Publicações do Departamento de Matemática Universidade de Coimbra Preprint Number 6 OPTIMAL CONTROL OF PIEZOELECTRIC ANISOTROPIC PLATES ISABEL NARRA FIGUEIREDO AND GEORG STADLER ABSTRACT: This paper
Pré-Publicações do Departamento de Matemática Universidade de Coimbra Preprint Number 6 OPTIMAL CONTROL OF PIEZOELECTRIC ANISOTROPIC PLATES ISABEL NARRA FIGUEIREDO AND GEORG STADLER ABSTRACT: This paper
Enhancing eigenvalue approximation by gradient recovery on adaptive meshes
 IMA Journal of Numerical Analysis Advance Access published October 29, 2008 IMA Journal of Numerical Analysis Page 1 of 15 doi:10.1093/imanum/drn050 Enhancing eigenvalue approximation by gradient recovery
IMA Journal of Numerical Analysis Advance Access published October 29, 2008 IMA Journal of Numerical Analysis Page 1 of 15 doi:10.1093/imanum/drn050 Enhancing eigenvalue approximation by gradient recovery
Error estimates for the discretization of the velocity tracking problem
 Numerische Mathematik manuscript No. (will be inserted by the editor) Error estimates for the discretization of the velocity tracking problem Eduardo Casas 1, Konstantinos Chrysafinos 2 1 Departamento
Numerische Mathematik manuscript No. (will be inserted by the editor) Error estimates for the discretization of the velocity tracking problem Eduardo Casas 1, Konstantinos Chrysafinos 2 1 Departamento
Numerical Solutions to Partial Differential Equations
 Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University The Residual and Error of Finite Element Solutions Mixed BVP of Poisson Equation
Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University The Residual and Error of Finite Element Solutions Mixed BVP of Poisson Equation
Optimal control of semilinear elliptic PDEs with state constraints - numerical analysis and implementation
 Optimal control of semilinear elliptic PDEs with state constraints - numerical analysis and implementation Dissertation with the aim of achieving a doctoral degree at the Faculty of Mathematics, Informatics
Optimal control of semilinear elliptic PDEs with state constraints - numerical analysis and implementation Dissertation with the aim of achieving a doctoral degree at the Faculty of Mathematics, Informatics
A Posteriori Error Estimation Techniques for Finite Element Methods. Zhiqiang Cai Purdue University
 A Posteriori Error Estimation Techniques for Finite Element Methods Zhiqiang Cai Purdue University Department of Mathematics, Purdue University Slide 1, March 16, 2017 Books Ainsworth & Oden, A posteriori
A Posteriori Error Estimation Techniques for Finite Element Methods Zhiqiang Cai Purdue University Department of Mathematics, Purdue University Slide 1, March 16, 2017 Books Ainsworth & Oden, A posteriori
An interpolation operator for H 1 functions on general quadrilateral and hexahedral meshes with hanging nodes
 An interpolation operator for H 1 functions on general quadrilateral and hexahedral meshes with hanging nodes Vincent Heuveline Friedhelm Schieweck Abstract We propose a Scott-Zhang type interpolation
An interpolation operator for H 1 functions on general quadrilateral and hexahedral meshes with hanging nodes Vincent Heuveline Friedhelm Schieweck Abstract We propose a Scott-Zhang type interpolation
Adaptive discretization and first-order methods for nonsmooth inverse problems for PDEs
 Adaptive discretization and first-order methods for nonsmooth inverse problems for PDEs Christian Clason Faculty of Mathematics, Universität Duisburg-Essen joint work with Barbara Kaltenbacher, Tuomo Valkonen,
Adaptive discretization and first-order methods for nonsmooth inverse problems for PDEs Christian Clason Faculty of Mathematics, Universität Duisburg-Essen joint work with Barbara Kaltenbacher, Tuomo Valkonen,
ON CONVERGENCE OF A RECEDING HORIZON METHOD FOR PARABOLIC BOUNDARY CONTROL. fredi tröltzsch and daniel wachsmuth 1
 ON CONVERGENCE OF A RECEDING HORIZON METHOD FOR PARABOLIC BOUNDARY CONTROL fredi tröltzsch and daniel wachsmuth Abstract. A method of receding horizon type is considered for a simplified linear-quadratic
ON CONVERGENCE OF A RECEDING HORIZON METHOD FOR PARABOLIC BOUNDARY CONTROL fredi tröltzsch and daniel wachsmuth Abstract. A method of receding horizon type is considered for a simplified linear-quadratic
Goal. Robust A Posteriori Error Estimates for Stabilized Finite Element Discretizations of Non-Stationary Convection-Diffusion Problems.
 Robust A Posteriori Error Estimates for Stabilized Finite Element s of Non-Stationary Convection-Diffusion Problems L. Tobiska and R. Verfürth Universität Magdeburg Ruhr-Universität Bochum www.ruhr-uni-bochum.de/num
Robust A Posteriori Error Estimates for Stabilized Finite Element s of Non-Stationary Convection-Diffusion Problems L. Tobiska and R. Verfürth Universität Magdeburg Ruhr-Universität Bochum www.ruhr-uni-bochum.de/num
NEW REGULARITY RESULTS AND IMPROVED ERROR ESTIMATES FOR OPTIMAL CONTROL PROBLEMS WITH STATE CONSTRAINTS.
 ESAIM: Control, Optimisation and Calculus of Variations URL: http://www.emath.fr/cocv/ Will be set by the publisher NEW REGULARITY RESULTS AND IMPROVED ERROR ESTIMATES FOR OPTIMAL CONTROL PROBLEMS WITH
ESAIM: Control, Optimisation and Calculus of Variations URL: http://www.emath.fr/cocv/ Will be set by the publisher NEW REGULARITY RESULTS AND IMPROVED ERROR ESTIMATES FOR OPTIMAL CONTROL PROBLEMS WITH
PIECEWISE LINEAR FINITE ELEMENT METHODS ARE NOT LOCALIZED
 PIECEWISE LINEAR FINITE ELEMENT METHODS ARE NOT LOCALIZED ALAN DEMLOW Abstract. Recent results of Schatz show that standard Galerkin finite element methods employing piecewise polynomial elements of degree
PIECEWISE LINEAR FINITE ELEMENT METHODS ARE NOT LOCALIZED ALAN DEMLOW Abstract. Recent results of Schatz show that standard Galerkin finite element methods employing piecewise polynomial elements of degree
A PRIORI ERROR ESTIMATE AND SUPERCONVERGENCE ANALYSIS FOR AN OPTIMAL CONTROL PROBLEM OF BILINEAR TYPE *
 Journal of Computational Mathematics, Vol.??, No.??, 2008, 1 17. A PRIORI ERROR ESTIMATE AND SUPERCONVERGENCE ANALYSIS FOR AN OPTIMAL CONTROL PROBLEM OF BILINEAR TYPE * Danping Yang Department of Mathematics,
Journal of Computational Mathematics, Vol.??, No.??, 2008, 1 17. A PRIORI ERROR ESTIMATE AND SUPERCONVERGENCE ANALYSIS FOR AN OPTIMAL CONTROL PROBLEM OF BILINEAR TYPE * Danping Yang Department of Mathematics,
Optimal PDE Control Using COMSOL Multiphysics
 Excerpt from the Proceedings of the COMSOL Conference 2008 Hannover Optimal PDE Control Using COMSOL Multiphysics Ira Neitzel 1, Uwe Prüfert 2,, and Thomas Slawig 3 1 Technische Universität Berlin/SPP
Excerpt from the Proceedings of the COMSOL Conference 2008 Hannover Optimal PDE Control Using COMSOL Multiphysics Ira Neitzel 1, Uwe Prüfert 2,, and Thomas Slawig 3 1 Technische Universität Berlin/SPP
Superlinear convergence of the Control Reduced Interior Point Method for PDE Constrained Optimization 1
 Konrad-Zuse-Zentrum für Informationstechnik Berlin Takustraße 7 D-14195 Berlin-Dahlem Germany ANTON SCHIELA, MARTIN WEISER Superlinear convergence of the Control Reduced Interior Point Method for PDE Constrained
Konrad-Zuse-Zentrum für Informationstechnik Berlin Takustraße 7 D-14195 Berlin-Dahlem Germany ANTON SCHIELA, MARTIN WEISER Superlinear convergence of the Control Reduced Interior Point Method for PDE Constrained
A. RÖSCH AND F. TRÖLTZSCH
 ON REGULARITY OF SOLUTIONS AND LAGRANGE MULTIPLIERS OF OPTIMAL CONTROL PROBLEMS FOR SEMILINEAR EQUATIONS WITH MIXED POINTWISE CONTROL-STATE CONSTRAINTS A. RÖSCH AND F. TRÖLTZSCH Abstract. A class of nonlinear
ON REGULARITY OF SOLUTIONS AND LAGRANGE MULTIPLIERS OF OPTIMAL CONTROL PROBLEMS FOR SEMILINEAR EQUATIONS WITH MIXED POINTWISE CONTROL-STATE CONSTRAINTS A. RÖSCH AND F. TRÖLTZSCH Abstract. A class of nonlinear
Oblique derivative problems for elliptic and parabolic equations, Lecture II
 of the for elliptic and parabolic equations, Lecture II Iowa State University July 22, 2011 of the 1 2 of the of the As a preliminary step in our further we now look at a special situation for elliptic.
of the for elliptic and parabolic equations, Lecture II Iowa State University July 22, 2011 of the 1 2 of the of the As a preliminary step in our further we now look at a special situation for elliptic.
Necessary conditions for convergence rates of regularizations of optimal control problems
 Necessary conditions for convergence rates of regularizations of optimal control problems Daniel Wachsmuth and Gerd Wachsmuth Johann Radon Institute for Computational and Applied Mathematics RICAM), Austrian
Necessary conditions for convergence rates of regularizations of optimal control problems Daniel Wachsmuth and Gerd Wachsmuth Johann Radon Institute for Computational and Applied Mathematics RICAM), Austrian
Key words. Surface, interface, finite element, level set method, adaptivity, error estimator
 AN ADAPIVE SURFACE FINIE ELEMEN MEHOD BASED ON VOLUME MESHES ALAN DEMLOW AND MAXIM A. OLSHANSKII Abstract. In this paper we define an adaptive version of a recently introduced finite element method for
AN ADAPIVE SURFACE FINIE ELEMEN MEHOD BASED ON VOLUME MESHES ALAN DEMLOW AND MAXIM A. OLSHANSKII Abstract. In this paper we define an adaptive version of a recently introduced finite element method for
A POSTERIORI ERROR ESTIMATES OF TRIANGULAR MIXED FINITE ELEMENT METHODS FOR QUADRATIC CONVECTION DIFFUSION OPTIMAL CONTROL PROBLEMS
 A POSTERIORI ERROR ESTIMATES OF TRIANGULAR MIXED FINITE ELEMENT METHODS FOR QUADRATIC CONVECTION DIFFUSION OPTIMAL CONTROL PROBLEMS Z. LU Communicated by Gabriela Marinoschi In this paper, we discuss a
A POSTERIORI ERROR ESTIMATES OF TRIANGULAR MIXED FINITE ELEMENT METHODS FOR QUADRATIC CONVECTION DIFFUSION OPTIMAL CONTROL PROBLEMS Z. LU Communicated by Gabriela Marinoschi In this paper, we discuss a
c 2008 Society for Industrial and Applied Mathematics
 SIAM J. CONTROL OPTIM. Vol. 47, No. 3, pp. 1301 1329 c 2008 Society for Industrial and Applied Mathematics A PRIORI ERROR ESTIMATES FOR SPACE-TIME FINITE ELEMENT DISCRETIZATION OF PARABOLIC OPTIMAL CONTROL
SIAM J. CONTROL OPTIM. Vol. 47, No. 3, pp. 1301 1329 c 2008 Society for Industrial and Applied Mathematics A PRIORI ERROR ESTIMATES FOR SPACE-TIME FINITE ELEMENT DISCRETIZATION OF PARABOLIC OPTIMAL CONTROL
On Dual-Weighted Residual Error Estimates for p-dependent Discretizations
 On Dual-Weighted Residual Error Estimates for p-dependent Discretizations Aerospace Computational Design Laboratory Report TR-11-1 Masayuki Yano and David L. Darmofal September 21, 2011 Abstract This report
On Dual-Weighted Residual Error Estimates for p-dependent Discretizations Aerospace Computational Design Laboratory Report TR-11-1 Masayuki Yano and David L. Darmofal September 21, 2011 Abstract This report
Adaptive Finite Element Methods Lecture Notes Winter Term 2017/18. R. Verfürth. Fakultät für Mathematik, Ruhr-Universität Bochum
 Adaptive Finite Element Methods Lecture Notes Winter Term 2017/18 R. Verfürth Fakultät für Mathematik, Ruhr-Universität Bochum Contents Chapter I. Introduction 7 I.1. Motivation 7 I.2. Sobolev and finite
Adaptive Finite Element Methods Lecture Notes Winter Term 2017/18 R. Verfürth Fakultät für Mathematik, Ruhr-Universität Bochum Contents Chapter I. Introduction 7 I.1. Motivation 7 I.2. Sobolev and finite
A posteriori estimators for obstacle problems by the hypercircle method
 A posteriori estimators for obstacle problems by the hypercircle method Dietrich Braess 1 Ronald H.W. Hoppe 2,3 Joachim Schöberl 4 January 9, 2008 Abstract A posteriori error estimates for the obstacle
A posteriori estimators for obstacle problems by the hypercircle method Dietrich Braess 1 Ronald H.W. Hoppe 2,3 Joachim Schöberl 4 January 9, 2008 Abstract A posteriori error estimates for the obstacle
arxiv: v2 [math.na] 1 Jun 2018
![arxiv: v2 [math.na] 1 Jun 2018](/thumbs/84/89557580.jpg "arxiv: v2 [math.na] 1 Jun 2018") arxiv:1805.04844v2 [math.na] 1 Jun 2018 An interface-unfitted finite element method for elliptic interface optimal control problem Chao Chao Yang, Tao Wang, Xiaoping Xie School of Mathematics, Sichuan
arxiv:1805.04844v2 [math.na] 1 Jun 2018 An interface-unfitted finite element method for elliptic interface optimal control problem Chao Chao Yang, Tao Wang, Xiaoping Xie School of Mathematics, Sichuan
L -Estimates of Rectangular Mixed Methods for Nonlinear Constrained Optimal Control Problem
 BULLETIN of the MALAYSIAN MATHEMATICAL SCIENCES SOCIETY http:/math.usm.my/bulletin Bull. Malays. Math. Sci. Soc. (2) 37(1) (2014), 271 284 L -Estimates of Rectangular Mixed Methods for Nonlinear Constrained
BULLETIN of the MALAYSIAN MATHEMATICAL SCIENCES SOCIETY http:/math.usm.my/bulletin Bull. Malays. Math. Sci. Soc. (2) 37(1) (2014), 271 284 L -Estimates of Rectangular Mixed Methods for Nonlinear Constrained
Lectures Notes Algorithms and Preconditioning in PDE-Constrained Optimization. Prof. Dr. R. Herzog
 Lectures Notes Algorithms and Preconditioning in PDE-Constrained Optimization Prof. Dr. R. Herzog held in July 2010 at the Summer School on Analysis and Numerics of PDE Constrained Optimization, Lambrecht
Lectures Notes Algorithms and Preconditioning in PDE-Constrained Optimization Prof. Dr. R. Herzog held in July 2010 at the Summer School on Analysis and Numerics of PDE Constrained Optimization, Lambrecht
Axioms of Adaptivity (AoA) in Lecture 3 (sufficient for optimal convergence rates)
 in Lecture 3 (sufficient for optimal convergence rates)") Axioms of Adaptivity (AoA) in Lecture 3 (sufficient for optimal convergence rates) Carsten Carstensen Humboldt-Universität zu Berlin 2018 International Graduate Summer School on Frontiers of Applied and
Axioms of Adaptivity (AoA) in Lecture 3 (sufficient for optimal convergence rates) Carsten Carstensen Humboldt-Universität zu Berlin 2018 International Graduate Summer School on Frontiers of Applied and
A posteriori error estimates for some problems in linear elasticity
 Helsinki University of Technology, Institute of Mathematics, Research Reports Teknillisen korkeakoulun matematiikan laitoksen tutkimusraporttisarja Espoo 2007 A522 A posteriori error estimates for some
Helsinki University of Technology, Institute of Mathematics, Research Reports Teknillisen korkeakoulun matematiikan laitoksen tutkimusraporttisarja Espoo 2007 A522 A posteriori error estimates for some
ENERGY NORM A POSTERIORI ERROR ESTIMATES FOR MIXED FINITE ELEMENT METHODS
 MATHEMATICS OF COMPUTATION Volume 75, Number 256, October 2006, Pages 1659 1674 S 0025-57180601872-2 Article electronically published on June 26, 2006 ENERGY NORM A POSTERIORI ERROR ESTIMATES FOR MIXED
MATHEMATICS OF COMPUTATION Volume 75, Number 256, October 2006, Pages 1659 1674 S 0025-57180601872-2 Article electronically published on June 26, 2006 ENERGY NORM A POSTERIORI ERROR ESTIMATES FOR MIXED
Numerical Solutions to Partial Differential Equations
 Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University Nonconformity and the Consistency Error First Strang Lemma Abstract Error Estimate
Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University Nonconformity and the Consistency Error First Strang Lemma Abstract Error Estimate
Supraconvergence of a Non-Uniform Discretisation for an Elliptic Third-Kind Boundary-Value Problem with Mixed Derivatives
 Supraconvergence of a Non-Uniform Discretisation for an Elliptic Third-Kind Boundary-Value Problem with Mixed Derivatives Etienne Emmrich Technische Universität Berlin, Institut für Mathematik, Straße
Supraconvergence of a Non-Uniform Discretisation for an Elliptic Third-Kind Boundary-Value Problem with Mixed Derivatives Etienne Emmrich Technische Universität Berlin, Institut für Mathematik, Straße
ADAPTIVE HYBRIDIZED INTERIOR PENALTY DISCONTINUOUS GALERKIN METHODS FOR H(CURL)-ELLIPTIC PROBLEMS
-ELLIPTIC PROBLEMS") ADAPTIVE HYBRIDIZED INTERIOR PENALTY DISCONTINUOUS GALERKIN METHODS OR HCURL-ELLIPTIC PROBLEMS C. CARSTENSEN, R. H. W. HOPPE, N. SHARMA, AND T. WARBURTON Abstract. We develop and analyze an adaptive hybridized
ADAPTIVE HYBRIDIZED INTERIOR PENALTY DISCONTINUOUS GALERKIN METHODS OR HCURL-ELLIPTIC PROBLEMS C. CARSTENSEN, R. H. W. HOPPE, N. SHARMA, AND T. WARBURTON Abstract. We develop and analyze an adaptive hybridized
Maximum-norm a posteriori estimates for discontinuous Galerkin methods
 Maximum-norm a posteriori estimates for discontinuous Galerkin methods Emmanuil Georgoulis Department of Mathematics, University of Leicester, UK Based on joint work with Alan Demlow (Kentucky, USA) DG
Maximum-norm a posteriori estimates for discontinuous Galerkin methods Emmanuil Georgoulis Department of Mathematics, University of Leicester, UK Based on joint work with Alan Demlow (Kentucky, USA) DG
PRECONDITIONED SOLUTION OF STATE GRADIENT CONSTRAINED ELLIPTIC OPTIMAL CONTROL PROBLEMS
 PRECONDITIONED SOLUTION OF STATE GRADIENT CONSTRAINED ELLIPTIC OPTIMAL CONTROL PROBLEMS Roland Herzog Susann Mach January 30, 206 Elliptic optimal control problems with pointwise state gradient constraints
PRECONDITIONED SOLUTION OF STATE GRADIENT CONSTRAINED ELLIPTIC OPTIMAL CONTROL PROBLEMS Roland Herzog Susann Mach January 30, 206 Elliptic optimal control problems with pointwise state gradient constraints
On Multigrid for Phase Field
 On Multigrid for Phase Field Carsten Gräser (FU Berlin), Ralf Kornhuber (FU Berlin), Rolf Krause (Uni Bonn), and Vanessa Styles (University of Sussex) Interphase 04 Rome, September, 13-16, 2004 Synopsis
On Multigrid for Phase Field Carsten Gräser (FU Berlin), Ralf Kornhuber (FU Berlin), Rolf Krause (Uni Bonn), and Vanessa Styles (University of Sussex) Interphase 04 Rome, September, 13-16, 2004 Synopsis
Hamburger Beiträge zur Angewandten Mathematik
 Hamburger Beiträge zur Angewandten Mathematik Space-time finite element approximation of parabolic optimal control problems Wei Gong, Michael Hinze, and Zhaojie Zhou Nr. 2-22 November 2 SPACE-IME FINIE
Hamburger Beiträge zur Angewandten Mathematik Space-time finite element approximation of parabolic optimal control problems Wei Gong, Michael Hinze, and Zhaojie Zhou Nr. 2-22 November 2 SPACE-IME FINIE