Monte Carlo simulation inspired by computational optimization. Colin Fox Al Parker, John Bardsley MCQMC Feb 2012, Sydney
|
|
|
- Edward Carson
- 5 years ago
- Views:
Transcription



1 Monte Carlo simulation inspired by computational optimization Colin Fox Al Parker, John Bardsley MCQMC Feb 2012, Sydney
2 Sampling from π(x) Consider : x is high-dimensional ( ) and π is expensive to compute MH-MCMC repeatedly simulates fixed transition kernel P with πp = π via detailed balance (self-adjoint in π) n-step distribution: π (n) = π (n 1) P = π (0) P n n-step error in distribution: π (n) π = ( π (0) π ) P n error polynomial: P n = (I (I P)) n = (1 λ) n Hence convergence is geometric This was the state of stationary linear solvers in 1950 s now considered very slow Polynomial acceleration: (choose x (i) w.p. α i ) π (0) n α i P i error poly: Q n = i=1 n α i (1 λ) i i=1
3 Sampling from π(x) Consider : x is high-dimensional ( ) and π is expensive to compute MH-MCMC repeatedly simulates fixed transition kernel P with πp = π via detailed balance (self-adjoint in π) n-step distribution: π (n) = π (n 1) P = π (0) P n n-step error in distribution: π (n) π = ( π (0) π ) P n error polynomial: P n = (I (I P)) n = (1 λ) n Hence convergence is geometric This was the state of stationary linear solvers in 1950 s now considered very slow Polynomial acceleration: (choose x (i) w.p. α i ) π (0) n α i P i error poly: Q n = i=1 n α i (1 λ) i i=1
4 Gibbs sampling Gibbs sampling a repeatedly samples from (block) conditional distributions Forward and reverse sweep simulates a reversible kernel, as in MH-MCMC Normal distributions π (x) = det (A) 2π n exp { 1 } 2 xt Ax + b T x precision matrix A, covariance matrix Σ = A 1 (both SPD) wlog treat zero mean Particularly interested in case where A is sparse (GMRF) and n large When is π (0) is also normal, then so is the n-step distribution A (n) A Σ (n) Σ In what sense is stochastic relaxation related to relaxation? What decomposition of A is this performing? a Glauber 1963 (heat-bath algorithm), Turcin 1971, Geman and Geman 1984





5 Gibbs samplers and equivalent linear solvers Optimization... Sampling... Gauss-Seidel Cheby-GS CG/Lanczos Gibbs Cheby-Gibbs Lanczos
6 Matrix formulation of Gibbs sampling from N(0, A 1 ) Let y = (y 1, y 2,..., y n ) T Component-wise Gibbs updates each component in sequence from the (normal) conditional distributions One sweep over all n components can be written y (k+1) = D 1 Ly (k+1) D 1 L T y (k) + D 1/2 z (k) where: D = diag(a), L is the strictly lower triangular part of A, z (k 1) N(0, I) y (k+1) = Gy (k) + c (k) c (k) is iid noise with zero mean, finite covariance stochastic AR(1) process = first order stationary iteration plus noise Goodman & Sokal, 1989
7 Matrix splitting form of stationary iterative methods The splitting A = M N converts linear system Ax = b to Mx = Nx + b. If M is nonsingular x = M 1 Nx + M 1 b. Iterative methods compute successively better approximations by x (k+1) = M 1 Nx (k) + M 1 b = Gx (k) + g Many splittings use terms in A = L + D + U. Gauss-Seidel sets M = L + D x (k+1) = D 1 Lx (k+1) D 1 L T x (k) + D 1 b spot the similarity to Gibbs y (k+1) = D 1 Ly (k+1) D 1 L T y (k) + D 1/2 z (k) Goodman & Sokal, 1989; Amit & Grenander, 1991
8 Matrix splitting form of stationary iterative methods The splitting A = M N converts linear system Ax = b to Mx = Nx + b. If M is nonsingular x = M 1 Nx + M 1 b. Iterative methods compute successively better approximations by x (k+1) = M 1 Nx (k) + M 1 b = Gx (k) + g Many splittings use terms in A = L + D + U. Gauss-Seidel sets M = L + D x (k+1) = D 1 Lx (k+1) D 1 L T x (k) + D 1 b spot the similarity to Gibbs y (k+1) = D 1 Ly (k+1) D 1 L T y (k) + D 1/2 z (k) Goodman & Sokal 1989; Amit & Grenander 1991
9 Gibbs converges solver converges Theorem 1 Let A = M N, M invertible. The stationary linear solver x (k+1) = M 1 Nx (k) + M 1 b = Gx (k) + M 1 b converges, if and only if the random iteration y (k+1) = M 1 Ny (k) + M 1 c (k) = Gy (k) + M 1 c (k) converges in distribution. Here c (k) iid π n has zero mean and finite variance Proof. Both converge iff ϱ(g) < 1 Convergent splittings generate convergent (generalized) Gibbs samplers Mean converges with asymptotic convergence factor ϱ(g), covariance with ϱ(g) 2 Young 1971 Thm 3-5.1, Duflo 1997 Thm , Goodman & Sokal, 1989, Galli & Gao 2001 F Parker 2012
10 Some not so common Gibbs samplers for N(0, A 1 ) splitting/sampler M Var ( c (k)) = M T + N converge if 1 Richardson ω I 2 ω I A 0 < ω < 2 ϱ(a) Jacobi D 2D A A SDD GS/Gibbs D + L D always SOR/B&F 1 ω D + L SSOR/REGS ω 2 ω M SORD 1 M T SOR ω 2 ω 2 ω ω ( D 0 < ω < 2 MSOR D 1 M T SOR 0 < ω < 2 +N T ) SOR D 1 N SOR Want: convenient to solve Mu = r and sample from N(0, M T + N) Relaxation parameter ω can accelerate Gibbs SSOR is a forwards and backwards sweep of SOR to give a symmetric splitting SOR: Adler 1981; Barone & Frigessi 1990, Amit & Grenander 1991, SSOR: Roberts & Sahu 1997
11 A closer look at convergence To sample from N(µ, A 1 ) where Aµ = b Split A = M N, M invertible. G = M 1 N, and c (k) iid N(0, M T + N) The iteration ( ) y (k+1) = Gy (k) + M 1 (c (k) + b implies and Var E ( y (m)) [ ( µ = G m E y (0)) ] µ ( y (m)) [ ( A 1 = G m Var y (0)) A 1] G m (Hence asymptotic average convergence factors ϱ(g) and ϱ(g) 2 ) Errors go down as the polynomial P m (I G) = (I (I G)) m = ( I M 1 A ) m P m (λ) = (1 λ) m solver and sampler have exactly the same error polynomial
12 A closer look at convergence To sample from N(µ, A 1 ) where Aµ = b Split A = M N, M invertible. G = M 1 N, and c (k) iid N(0, M T + N) The iteration ( ) y (k+1) = Gy (k) + M 1 (c (k) + b implies and Var E ( y (m)) [ ( µ = G m E y (0)) ] µ ( y (m)) [ ( A 1 = G m Var y (0)) A 1] G m (Hence asymptotic average convergence factors ϱ(g) and ϱ(g) 2 ) Errors go down as the polynomial P m (I G) = (I (I G)) m = ( I M 1 A ) m P m (λ) = (1 λ) m solver and sampler have exactly the same error polynomial
13 Controlling the error polynomial The splitting gives the iteration operator A = 1 ( τ M ) M N τ G τ = ( I τm 1 A ) and error polynomial P m (λ) = (1 τλ) m The sequence of parameters τ 1, τ 2,..., τ m gives the error polynomial P m (λ) = m (1 τ l λ) l=1... so we can choose the zeros of P m! This gives a non-stationary solver non-homogeneous Markov chain (equivalently, can post-process chain by taking linear combination of states) Golub & Varga 1961, Golub & van Loan 1989, Axelsson 1996, Saad 2003, F & Parker 2012
14 The best (Chebyshev) polynomial 10 iterations, factor of 300 improvement Choose 1 = λ n + λ 1 τ l 2 + λ n λ 1 2 cos where λ 1 λ n are extreme eigenvalues of M 1 A ( π 2l + 1 ) 2p l = 0, 1, 2,..., p 1
15 Second-order accelerated sampler First-order accelerated iteration turns out to be unstable Numerical stability, and optimality at each step, is given by the second-order iteration y (k+1) = (1 α k )y (k 1) + α k y (k) + α k τ k M 1 (c (k) Ay (k) ) with α k and τ k chosen so error polynomial satisfies Chebyshev recursion. Theorem 2 2 nd -order solver converges 2 nd -order sampler converges (given correct noise distribution) Error polynomial is optimal, at each step, for both mean and covariance Asymptotic average reduction factor (Axelsson 1996) is σ = 1 λ 1 /λ n 1 + λ 1 /λ n Axelsson 1996, F & Parker 2012
16 Algorithm 1: Chebyshev accelerated SSOR sampling from N(0, A 1 ) input : The SSOR splitting M, N of A; smallest eigenvalue λ min of M 1 A; largest eigenvalue λ max of M 1 A; relaxation parameter ω; initial state y (0) ; k max output: y (k) approximately distributed as N(0, A 1 ) set γ = ( ( 2 ω 1) 1/2, δ = λmax λ min 4 set α = 1, β = 2/θ, τ = 1/θ, τ c = 2 τ 1; for k = 1,..., k max do if k = 0 then b = 2 α 1, a = τ cb, κ = τ; end ) 2, θ = λ max +λ min 2 ; else b = 2(1 α)/β + 1, a = τ c + (b 1) (1/τ + 1/κ 1), κ = β + (1 α)κ; end sample z N(0, I); c = γb 1/2 D 1/2 z; x = y (k) + M 1 (c Ay (k) ); sample z N(0, I); c = γa 1/2 D 1/2 z; w = x y (k) + M T (c Ax); y (k+1) = α(y (k) y (k 1) + τw) + y (k 1) ; β = (θ βδ) 1 ; α = θβ;
17 10 10 lattice (d = 100) sparse precision matrix [A] ij = 10 4 δ ij + n i if i = j 1 if i j and s i s j otherwise 1 relative error SSOR, ω=1 SSOR, ω= Cheby SSOR, ω=1 Cheby SSOR, ω= Cholesky flops x times faster
18 lattice (d = 10 6 ) sparse precision matrix only used sparsity, no other special structure
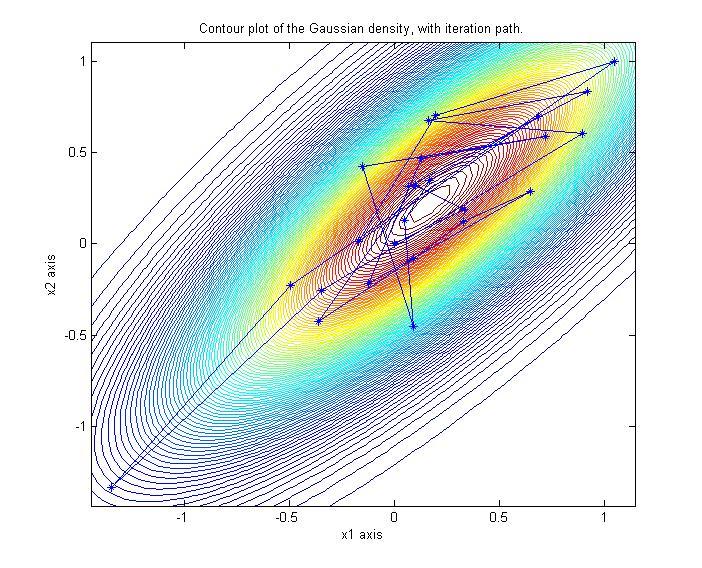
19 CG sampling x 2 p (0) x 2 5 =p (0) (0) x (2) p (1) x (1) x (2) x x p (1) x (1) x x 5 (1) x (0) x 1 x (0) x 1 Gibbs sampling & Gauss Seidel CG sampling & optimization Mutually conjugate vectors (wrt A) are independent directions V T AV = D A 1 = VD 1 V T so if z N (0, I) then x = V D 1 z N(0, A 1 ) Schneider & Willsky 2003, F 2008, Parker & F SISC 2012
20 CG sampling algorithm Apart from step 3, this is exactly (linear) CG optimization Var(y k ) is the CG polynomial Parker & F SISC 2012
21 Best approximation property Theorem 3 (Parker 2009) The covariance matrix Var(y k x 0, b 0 ) = V k T 1 k V k T has k non-zero eigenvalues which are the Lanczos estimates of the eigenvalues of A 1, σ i (Var(y k x 0, b 0 )) = 1. The eigenvectors of Var(y k x 0, b 0 ) are the Ritz vectors V θi k k v i which estimate the eigenvectors of A. When r k 2 = 0, then Var(b k y 0, b 0 ) = V k T k V T k and the k non-zero eigenpairs of Var(b k x 0, b 0 ) are the Lanczos Ritz pairs (θ k i, V kv i ). Var(y k x 0, b 0 ) approximates A 1 and Var(b k x 0, b 0 ) approximates A in the eigenspaces corresponding to the extreme and well separated eigenvalues of A. Parker & F SISC 2012

22 CG sampling example So CG (by itself) over-smooths : initialize Gibbs with CG Parker & F SISC 2012, Schneider & Willsky 2003
23 Some observations In the Gaussian setting GS GS... stochastic relaxation is fundamentally equivalent to classical relaxation... existing solvers ( mutligrid, fast multipole, parallel tools) can be used as is sampling has the same computational cost as solving... and is sometimes cheaper more generally acceleration of convergence in mean and covariance is not limited to Gaussian targets... and has been applied in some settings
Sample-based UQ via Computational Linear Algebra (not MCMC) Colin Fox Al Parker, John Bardsley March 2012
 Colin Fox Al Parker, John Bardsley March 2012") Sample-based UQ via Computational Linear Algebra (not MCMC) Colin Fox fox@physics.otago.ac.nz Al Parker, John Bardsley March 2012 Contents Example: sample-based inference in a large-scale problem Sampling
Sample-based UQ via Computational Linear Algebra (not MCMC) Colin Fox fox@physics.otago.ac.nz Al Parker, John Bardsley March 2012 Contents Example: sample-based inference in a large-scale problem Sampling
Polynomial accelerated MCMC... and other sampling algorithms inspired by computational optimization
 Polynomial accelerated MCMC... and other sampling algorithms inspired by computational optimization Colin Fox fox@physics.otago.ac.nz Al Parker, John Bardsley Fore-words Motivation: an inverse oceanography
Polynomial accelerated MCMC... and other sampling algorithms inspired by computational optimization Colin Fox fox@physics.otago.ac.nz Al Parker, John Bardsley Fore-words Motivation: an inverse oceanography
Monitoring milk-powder dryers via Bayesian inference in an FPGA. Colin Fox Markus Neumayer, Al Parker, Pat Suggate
 Monitoring milk-powder dryers via Bayesian inference in an FPGA Colin Fox fox@physics.otago.ac.nz Markus Neumayer, Al Parker, Pat Suggate Three newish technologies Gibbs sampling for capacitance tomography
Monitoring milk-powder dryers via Bayesian inference in an FPGA Colin Fox fox@physics.otago.ac.nz Markus Neumayer, Al Parker, Pat Suggate Three newish technologies Gibbs sampling for capacitance tomography
9.1 Preconditioned Krylov Subspace Methods
 Chapter 9 PRECONDITIONING 9.1 Preconditioned Krylov Subspace Methods 9.2 Preconditioned Conjugate Gradient 9.3 Preconditioned Generalized Minimal Residual 9.4 Relaxation Method Preconditioners 9.5 Incomplete
Chapter 9 PRECONDITIONING 9.1 Preconditioned Krylov Subspace Methods 9.2 Preconditioned Conjugate Gradient 9.3 Preconditioned Generalized Minimal Residual 9.4 Relaxation Method Preconditioners 9.5 Incomplete
Deblurring Jupiter (sampling in GLIP faster than regularized inversion) Colin Fox Richard A. Norton, J.
 Colin Fox Richard A. Norton, J.") Deblurring Jupiter (sampling in GLIP faster than regularized inversion) Colin Fox fox@physics.otago.ac.nz Richard A. Norton, J. Andrés Christen Topics... Backstory (?) Sampling in linear-gaussian hierarchical
Deblurring Jupiter (sampling in GLIP faster than regularized inversion) Colin Fox fox@physics.otago.ac.nz Richard A. Norton, J. Andrés Christen Topics... Backstory (?) Sampling in linear-gaussian hierarchical
Chapter 7 Iterative Techniques in Matrix Algebra
 Chapter 7 Iterative Techniques in Matrix Algebra Per-Olof Persson persson@berkeley.edu Department of Mathematics University of California, Berkeley Math 128B Numerical Analysis Vector Norms Definition
Chapter 7 Iterative Techniques in Matrix Algebra Per-Olof Persson persson@berkeley.edu Department of Mathematics University of California, Berkeley Math 128B Numerical Analysis Vector Norms Definition
Math Introduction to Numerical Analysis - Class Notes. Fernando Guevara Vasquez. Version Date: January 17, 2012.
 Math 5620 - Introduction to Numerical Analysis - Class Notes Fernando Guevara Vasquez Version 1990. Date: January 17, 2012. 3 Contents 1. Disclaimer 4 Chapter 1. Iterative methods for solving linear systems
Math 5620 - Introduction to Numerical Analysis - Class Notes Fernando Guevara Vasquez Version 1990. Date: January 17, 2012. 3 Contents 1. Disclaimer 4 Chapter 1. Iterative methods for solving linear systems
Algebraic Multigrid as Solvers and as Preconditioner
 Ò Algebraic Multigrid as Solvers and as Preconditioner Domenico Lahaye domenico.lahaye@cs.kuleuven.ac.be http://www.cs.kuleuven.ac.be/ domenico/ Department of Computer Science Katholieke Universiteit Leuven
Ò Algebraic Multigrid as Solvers and as Preconditioner Domenico Lahaye domenico.lahaye@cs.kuleuven.ac.be http://www.cs.kuleuven.ac.be/ domenico/ Department of Computer Science Katholieke Universiteit Leuven
Lecture 18 Classical Iterative Methods
 Lecture 18 Classical Iterative Methods MIT 18.335J / 6.337J Introduction to Numerical Methods Per-Olof Persson November 14, 2006 1 Iterative Methods for Linear Systems Direct methods for solving Ax = b,
Lecture 18 Classical Iterative Methods MIT 18.335J / 6.337J Introduction to Numerical Methods Per-Olof Persson November 14, 2006 1 Iterative Methods for Linear Systems Direct methods for solving Ax = b,
Iterative Methods and Multigrid
 Iterative Methods and Multigrid Part 1: Introduction to Multigrid 2000 Eric de Sturler 1 12/02/09 MG01.prz Basic Iterative Methods (1) Nonlinear equation: f(x) = 0 Rewrite as x = F(x), and iterate x i+1
Iterative Methods and Multigrid Part 1: Introduction to Multigrid 2000 Eric de Sturler 1 12/02/09 MG01.prz Basic Iterative Methods (1) Nonlinear equation: f(x) = 0 Rewrite as x = F(x), and iterate x i+1
LINEAR SYSTEMS (11) Intensive Computation
 Intensive Computation") LINEAR SYSTEMS () Intensive Computation 27-8 prof. Annalisa Massini Viviana Arrigoni EXACT METHODS:. GAUSSIAN ELIMINATION. 2. CHOLESKY DECOMPOSITION. ITERATIVE METHODS:. JACOBI. 2. GAUSS-SEIDEL 2 CHOLESKY
LINEAR SYSTEMS () Intensive Computation 27-8 prof. Annalisa Massini Viviana Arrigoni EXACT METHODS:. GAUSSIAN ELIMINATION. 2. CHOLESKY DECOMPOSITION. ITERATIVE METHODS:. JACOBI. 2. GAUSS-SEIDEL 2 CHOLESKY
Scientific Computing WS 2018/2019. Lecture 9. Jürgen Fuhrmann Lecture 9 Slide 1
 Scientific Computing WS 2018/2019 Lecture 9 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 9 Slide 1 Lecture 9 Slide 2 Simple iteration with preconditioning Idea: Aû = b iterative scheme û = û
Scientific Computing WS 2018/2019 Lecture 9 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 9 Slide 1 Lecture 9 Slide 2 Simple iteration with preconditioning Idea: Aû = b iterative scheme û = û
Preliminary/Qualifying Exam in Numerical Analysis (Math 502a) Spring 2012
 Spring 2012") Instructions Preliminary/Qualifying Exam in Numerical Analysis (Math 502a) Spring 2012 The exam consists of four problems, each having multiple parts. You should attempt to solve all four problems. 1.
Instructions Preliminary/Qualifying Exam in Numerical Analysis (Math 502a) Spring 2012 The exam consists of four problems, each having multiple parts. You should attempt to solve all four problems. 1.
Here is an example of a block diagonal matrix with Jordan Blocks on the diagonal: J
 Class Notes 4: THE SPECTRAL RADIUS, NORM CONVERGENCE AND SOR. Math 639d Due Date: Feb. 7 (updated: February 5, 2018) In the first part of this week s reading, we will prove Theorem 2 of the previous class.
Class Notes 4: THE SPECTRAL RADIUS, NORM CONVERGENCE AND SOR. Math 639d Due Date: Feb. 7 (updated: February 5, 2018) In the first part of this week s reading, we will prove Theorem 2 of the previous class.
9. Iterative Methods for Large Linear Systems
 EE507 - Computational Techniques for EE Jitkomut Songsiri 9. Iterative Methods for Large Linear Systems introduction splitting method Jacobi method Gauss-Seidel method successive overrelaxation (SOR) 9-1
EE507 - Computational Techniques for EE Jitkomut Songsiri 9. Iterative Methods for Large Linear Systems introduction splitting method Jacobi method Gauss-Seidel method successive overrelaxation (SOR) 9-1
Polynomial accelerated solutions to a LARGE Gaussian model for imaging biofilms: in theory and finite precision
 Journal of the American Statistical Association ISSN: 0162-1459 (Print) 1537-274X (Online) Journal homepage: http://www.tandfonline.com/loi/uasa20 Polynomial accelerated solutions to a LARGE Gaussian model
Journal of the American Statistical Association ISSN: 0162-1459 (Print) 1537-274X (Online) Journal homepage: http://www.tandfonline.com/loi/uasa20 Polynomial accelerated solutions to a LARGE Gaussian model
CLASSICAL ITERATIVE METHODS
 CLASSICAL ITERATIVE METHODS LONG CHEN In this notes we discuss classic iterative methods on solving the linear operator equation (1) Au = f, posed on a finite dimensional Hilbert space V = R N equipped
CLASSICAL ITERATIVE METHODS LONG CHEN In this notes we discuss classic iterative methods on solving the linear operator equation (1) Au = f, posed on a finite dimensional Hilbert space V = R N equipped
Bindel, Fall 2016 Matrix Computations (CS 6210) Notes for
 Notes for") 1 Iteration basics Notes for 2016-11-07 An iterative solver for Ax = b is produces a sequence of approximations x (k) x. We always stop after finitely many steps, based on some convergence criterion, e.g.
1 Iteration basics Notes for 2016-11-07 An iterative solver for Ax = b is produces a sequence of approximations x (k) x. We always stop after finitely many steps, based on some convergence criterion, e.g.
Iterative Methods. Splitting Methods
 Iterative Methods Splitting Methods 1 Direct Methods Solving Ax = b using direct methods. Gaussian elimination (using LU decomposition) Variants of LU, including Crout and Doolittle Other decomposition
Iterative Methods Splitting Methods 1 Direct Methods Solving Ax = b using direct methods. Gaussian elimination (using LU decomposition) Variants of LU, including Crout and Doolittle Other decomposition
FEM and Sparse Linear System Solving
 FEM & sparse system solving, Lecture 7, Nov 3, 2017 1/46 Lecture 7, Nov 3, 2015: Introduction to Iterative Solvers: Stationary Methods http://people.inf.ethz.ch/arbenz/fem16 Peter Arbenz Computer Science
FEM & sparse system solving, Lecture 7, Nov 3, 2017 1/46 Lecture 7, Nov 3, 2015: Introduction to Iterative Solvers: Stationary Methods http://people.inf.ethz.ch/arbenz/fem16 Peter Arbenz Computer Science
Clone MCMC: Parallel High-Dimensional Gaussian Gibbs Sampling
 Clone MCMC: Parallel High-Dimensional Gaussian Gibbs Sampling Andrei-Cristian Bărbos IMS Laboratory Univ. Bordeaux - CNRS - BINP andbarbos@u-bordeaux.fr Jean-François Giovannelli IMS Laboratory Univ. Bordeaux
Clone MCMC: Parallel High-Dimensional Gaussian Gibbs Sampling Andrei-Cristian Bărbos IMS Laboratory Univ. Bordeaux - CNRS - BINP andbarbos@u-bordeaux.fr Jean-François Giovannelli IMS Laboratory Univ. Bordeaux
Lecture Note 7: Iterative methods for solving linear systems. Xiaoqun Zhang Shanghai Jiao Tong University
 Lecture Note 7: Iterative methods for solving linear systems Xiaoqun Zhang Shanghai Jiao Tong University Last updated: December 24, 2014 1.1 Review on linear algebra Norms of vectors and matrices vector
Lecture Note 7: Iterative methods for solving linear systems Xiaoqun Zhang Shanghai Jiao Tong University Last updated: December 24, 2014 1.1 Review on linear algebra Norms of vectors and matrices vector
CHAPTER 5. Basic Iterative Methods
 Basic Iterative Methods CHAPTER 5 Solve Ax = f where A is large and sparse (and nonsingular. Let A be split as A = M N in which M is nonsingular, and solving systems of the form Mz = r is much easier than
Basic Iterative Methods CHAPTER 5 Solve Ax = f where A is large and sparse (and nonsingular. Let A be split as A = M N in which M is nonsingular, and solving systems of the form Mz = r is much easier than
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods: Markov Chain Monte Carlo
 Group Prof. Daniel Cremers 11. Sampling Methods: Markov Chain Monte Carlo Markov Chain Monte Carlo In high-dimensional spaces, rejection sampling and importance sampling are very inefficient An alternative
Group Prof. Daniel Cremers 11. Sampling Methods: Markov Chain Monte Carlo Markov Chain Monte Carlo In high-dimensional spaces, rejection sampling and importance sampling are very inefficient An alternative
Introduction to Iterative Solvers of Linear Systems
 Introduction to Iterative Solvers of Linear Systems SFB Training Event January 2012 Prof. Dr. Andreas Frommer Typeset by Lukas Krämer, Simon-Wolfgang Mages and Rudolf Rödl 1 Classes of Matrices and their
Introduction to Iterative Solvers of Linear Systems SFB Training Event January 2012 Prof. Dr. Andreas Frommer Typeset by Lukas Krämer, Simon-Wolfgang Mages and Rudolf Rödl 1 Classes of Matrices and their
7.3 The Jacobi and Gauss-Siedel Iterative Techniques. Problem: To solve Ax = b for A R n n. Methodology: Iteratively approximate solution x. No GEPP.
 7.3 The Jacobi and Gauss-Siedel Iterative Techniques Problem: To solve Ax = b for A R n n. Methodology: Iteratively approximate solution x. No GEPP. 7.3 The Jacobi and Gauss-Siedel Iterative Techniques
7.3 The Jacobi and Gauss-Siedel Iterative Techniques Problem: To solve Ax = b for A R n n. Methodology: Iteratively approximate solution x. No GEPP. 7.3 The Jacobi and Gauss-Siedel Iterative Techniques
Goal: to construct some general-purpose algorithms for solving systems of linear Equations
 Chapter IV Solving Systems of Linear Equations Goal: to construct some general-purpose algorithms for solving systems of linear Equations 4.6 Solution of Equations by Iterative Methods 4.6 Solution of
Chapter IV Solving Systems of Linear Equations Goal: to construct some general-purpose algorithms for solving systems of linear Equations 4.6 Solution of Equations by Iterative Methods 4.6 Solution of
4.6 Iterative Solvers for Linear Systems
 4.6 Iterative Solvers for Linear Systems Why use iterative methods? Virtually all direct methods for solving Ax = b require O(n 3 ) floating point operations. In practical applications the matrix A often
4.6 Iterative Solvers for Linear Systems Why use iterative methods? Virtually all direct methods for solving Ax = b require O(n 3 ) floating point operations. In practical applications the matrix A often
Some definitions. Math 1080: Numerical Linear Algebra Chapter 5, Solving Ax = b by Optimization. A-inner product. Important facts
 Some definitions Math 1080: Numerical Linear Algebra Chapter 5, Solving Ax = b by Optimization M. M. Sussman sussmanm@math.pitt.edu Office Hours: MW 1:45PM-2:45PM, Thack 622 A matrix A is SPD (Symmetric
Some definitions Math 1080: Numerical Linear Algebra Chapter 5, Solving Ax = b by Optimization M. M. Sussman sussmanm@math.pitt.edu Office Hours: MW 1:45PM-2:45PM, Thack 622 A matrix A is SPD (Symmetric
Iterative techniques in matrix algebra
 Iterative techniques in matrix algebra Tsung-Ming Huang Department of Mathematics National Taiwan Normal University, Taiwan September 12, 2015 Outline 1 Norms of vectors and matrices 2 Eigenvalues and
Iterative techniques in matrix algebra Tsung-Ming Huang Department of Mathematics National Taiwan Normal University, Taiwan September 12, 2015 Outline 1 Norms of vectors and matrices 2 Eigenvalues and
Numerical Methods - Numerical Linear Algebra
 Numerical Methods - Numerical Linear Algebra Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Numerical Linear Algebra I 2013 1 / 62 Outline 1 Motivation 2 Solving Linear
Numerical Methods - Numerical Linear Algebra Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Numerical Linear Algebra I 2013 1 / 62 Outline 1 Motivation 2 Solving Linear
Iterative Methods and Multigrid
 Iterative Methods and Multigrid Part 3: Preconditioning 2 Eric de Sturler Preconditioning The general idea behind preconditioning is that convergence of some method for the linear system Ax = b can be
Iterative Methods and Multigrid Part 3: Preconditioning 2 Eric de Sturler Preconditioning The general idea behind preconditioning is that convergence of some method for the linear system Ax = b can be
Statistics & Data Sciences: First Year Prelim Exam May 2018
 Statistics & Data Sciences: First Year Prelim Exam May 2018 Instructions: 1. Do not turn this page until instructed to do so. 2. Start each new question on a new sheet of paper. 3. This is a closed book
Statistics & Data Sciences: First Year Prelim Exam May 2018 Instructions: 1. Do not turn this page until instructed to do so. 2. Start each new question on a new sheet of paper. 3. This is a closed book
Computer Vision Group Prof. Daniel Cremers. 10a. Markov Chain Monte Carlo
 Group Prof. Daniel Cremers 10a. Markov Chain Monte Carlo Markov Chain Monte Carlo In high-dimensional spaces, rejection sampling and importance sampling are very inefficient An alternative is Markov Chain
Group Prof. Daniel Cremers 10a. Markov Chain Monte Carlo Markov Chain Monte Carlo In high-dimensional spaces, rejection sampling and importance sampling are very inefficient An alternative is Markov Chain
General Construction of Irreversible Kernel in Markov Chain Monte Carlo
 General Construction of Irreversible Kernel in Markov Chain Monte Carlo Metropolis heat bath Suwa Todo Department of Applied Physics, The University of Tokyo Department of Physics, Boston University (from
General Construction of Irreversible Kernel in Markov Chain Monte Carlo Metropolis heat bath Suwa Todo Department of Applied Physics, The University of Tokyo Department of Physics, Boston University (from
Computational Linear Algebra
 Computational Linear Algebra PD Dr. rer. nat. habil. Ralf Peter Mundani Computation in Engineering / BGU Scientific Computing in Computer Science / INF Winter Term 2017/18 Part 3: Iterative Methods PD
Computational Linear Algebra PD Dr. rer. nat. habil. Ralf Peter Mundani Computation in Engineering / BGU Scientific Computing in Computer Science / INF Winter Term 2017/18 Part 3: Iterative Methods PD
The Conjugate Gradient Method
 The Conjugate Gradient Method Classical Iterations We have a problem, We assume that the matrix comes from a discretization of a PDE. The best and most popular model problem is, The matrix will be as large
The Conjugate Gradient Method Classical Iterations We have a problem, We assume that the matrix comes from a discretization of a PDE. The best and most popular model problem is, The matrix will be as large
Algebra C Numerical Linear Algebra Sample Exam Problems
 Algebra C Numerical Linear Algebra Sample Exam Problems Notation. Denote by V a finite-dimensional Hilbert space with inner product (, ) and corresponding norm. The abbreviation SPD is used for symmetric
Algebra C Numerical Linear Algebra Sample Exam Problems Notation. Denote by V a finite-dimensional Hilbert space with inner product (, ) and corresponding norm. The abbreviation SPD is used for symmetric
EXAMPLES OF CLASSICAL ITERATIVE METHODS
 EXAMPLES OF CLASSICAL ITERATIVE METHODS In these lecture notes we revisit a few classical fixpoint iterations for the solution of the linear systems of equations. We focus on the algebraic and algorithmic
EXAMPLES OF CLASSICAL ITERATIVE METHODS In these lecture notes we revisit a few classical fixpoint iterations for the solution of the linear systems of equations. We focus on the algebraic and algorithmic
AMS526: Numerical Analysis I (Numerical Linear Algebra)
") AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 24: Preconditioning and Multigrid Solver Xiangmin Jiao SUNY Stony Brook Xiangmin Jiao Numerical Analysis I 1 / 5 Preconditioning Motivation:
AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 24: Preconditioning and Multigrid Solver Xiangmin Jiao SUNY Stony Brook Xiangmin Jiao Numerical Analysis I 1 / 5 Preconditioning Motivation:
Numerical Methods in Matrix Computations
 Ake Bjorck Numerical Methods in Matrix Computations Springer Contents 1 Direct Methods for Linear Systems 1 1.1 Elements of Matrix Theory 1 1.1.1 Matrix Algebra 2 1.1.2 Vector Spaces 6 1.1.3 Submatrices
Ake Bjorck Numerical Methods in Matrix Computations Springer Contents 1 Direct Methods for Linear Systems 1 1.1 Elements of Matrix Theory 1 1.1.1 Matrix Algebra 2 1.1.2 Vector Spaces 6 1.1.3 Submatrices
Stabilization and Acceleration of Algebraic Multigrid Method
 Stabilization and Acceleration of Algebraic Multigrid Method Recursive Projection Algorithm A. Jemcov J.P. Maruszewski Fluent Inc. October 24, 2006 Outline 1 Need for Algorithm Stabilization and Acceleration
Stabilization and Acceleration of Algebraic Multigrid Method Recursive Projection Algorithm A. Jemcov J.P. Maruszewski Fluent Inc. October 24, 2006 Outline 1 Need for Algorithm Stabilization and Acceleration
Iterative Solution methods
 p. 1/28 TDB NLA Parallel Algorithms for Scientific Computing Iterative Solution methods p. 2/28 TDB NLA Parallel Algorithms for Scientific Computing Basic Iterative Solution methods The ideas to use iterative
p. 1/28 TDB NLA Parallel Algorithms for Scientific Computing Iterative Solution methods p. 2/28 TDB NLA Parallel Algorithms for Scientific Computing Basic Iterative Solution methods The ideas to use iterative
Iterative methods for Linear System
 Iterative methods for Linear System JASS 2009 Student: Rishi Patil Advisor: Prof. Thomas Huckle Outline Basics: Matrices and their properties Eigenvalues, Condition Number Iterative Methods Direct and
Iterative methods for Linear System JASS 2009 Student: Rishi Patil Advisor: Prof. Thomas Huckle Outline Basics: Matrices and their properties Eigenvalues, Condition Number Iterative Methods Direct and
Parallel Numerics, WT 2016/ Iterative Methods for Sparse Linear Systems of Equations. page 1 of 1
 Parallel Numerics, WT 2016/2017 5 Iterative Methods for Sparse Linear Systems of Equations page 1 of 1 Contents 1 Introduction 1.1 Computer Science Aspects 1.2 Numerical Problems 1.3 Graphs 1.4 Loop Manipulations
Parallel Numerics, WT 2016/2017 5 Iterative Methods for Sparse Linear Systems of Equations page 1 of 1 Contents 1 Introduction 1.1 Computer Science Aspects 1.2 Numerical Problems 1.3 Graphs 1.4 Loop Manipulations
MCMC Sampling for Bayesian Inference using L1-type Priors
 MÜNSTER MCMC Sampling for Bayesian Inference using L1-type Priors (what I do whenever the ill-posedness of EEG/MEG is just not frustrating enough!) AG Imaging Seminar Felix Lucka 26.06.2012 , MÜNSTER Sampling
MÜNSTER MCMC Sampling for Bayesian Inference using L1-type Priors (what I do whenever the ill-posedness of EEG/MEG is just not frustrating enough!) AG Imaging Seminar Felix Lucka 26.06.2012 , MÜNSTER Sampling
Math 5630: Iterative Methods for Systems of Equations Hung Phan, UMass Lowell March 22, 2018
 1 Linear Systems Math 5630: Iterative Methods for Systems of Equations Hung Phan, UMass Lowell March, 018 Consider the system 4x y + z = 7 4x 8y + z = 1 x + y + 5z = 15. We then obtain x = 1 4 (7 + y z)
1 Linear Systems Math 5630: Iterative Methods for Systems of Equations Hung Phan, UMass Lowell March, 018 Consider the system 4x y + z = 7 4x 8y + z = 1 x + y + 5z = 15. We then obtain x = 1 4 (7 + y z)
Introduction to Bayesian methods in inverse problems
 Introduction to Bayesian methods in inverse problems Ville Kolehmainen 1 1 Department of Applied Physics, University of Eastern Finland, Kuopio, Finland March 4 2013 Manchester, UK. Contents Introduction
Introduction to Bayesian methods in inverse problems Ville Kolehmainen 1 1 Department of Applied Physics, University of Eastern Finland, Kuopio, Finland March 4 2013 Manchester, UK. Contents Introduction
Iterative Methods for Smooth Objective Functions
 Optimization Iterative Methods for Smooth Objective Functions Quadratic Objective Functions Stationary Iterative Methods (first/second order) Steepest Descent Method Landweber/Projected Landweber Methods
Optimization Iterative Methods for Smooth Objective Functions Quadratic Objective Functions Stationary Iterative Methods (first/second order) Steepest Descent Method Landweber/Projected Landweber Methods
Numerical Programming I (for CSE)
") Technische Universität München WT 1/13 Fakultät für Mathematik Prof. Dr. M. Mehl B. Gatzhammer January 1, 13 Numerical Programming I (for CSE) Tutorial 1: Iterative Methods 1) Relaxation Methods a) Let
Technische Universität München WT 1/13 Fakultät für Mathematik Prof. Dr. M. Mehl B. Gatzhammer January 1, 13 Numerical Programming I (for CSE) Tutorial 1: Iterative Methods 1) Relaxation Methods a) Let
Stat. 758: Computation and Programming
 Stat. 758: Computation and Programming Eric B. Laber Department of Statistics, North Carolina State University Lecture 4a Sept. 10, 2015 Ambition is like a frog sitting on a Venus flytrap. The flytrap
Stat. 758: Computation and Programming Eric B. Laber Department of Statistics, North Carolina State University Lecture 4a Sept. 10, 2015 Ambition is like a frog sitting on a Venus flytrap. The flytrap
Approximating a single component of the solution to a linear system
 Approximating a single component of the solution to a linear system Christina E. Lee, Asuman Ozdaglar, Devavrat Shah celee@mit.edu asuman@mit.edu devavrat@mit.edu MIT LIDS 1 How do I compare to my competitors?
Approximating a single component of the solution to a linear system Christina E. Lee, Asuman Ozdaglar, Devavrat Shah celee@mit.edu asuman@mit.edu devavrat@mit.edu MIT LIDS 1 How do I compare to my competitors?
Preconditioning Techniques Analysis for CG Method
 Preconditioning Techniques Analysis for CG Method Huaguang Song Department of Computer Science University of California, Davis hso@ucdavis.edu Abstract Matrix computation issue for solve linear system
Preconditioning Techniques Analysis for CG Method Huaguang Song Department of Computer Science University of California, Davis hso@ucdavis.edu Abstract Matrix computation issue for solve linear system
Iterative methods for Linear System of Equations. Joint Advanced Student School (JASS-2009)
") Iterative methods for Linear System of Equations Joint Advanced Student School (JASS-2009) Course #2: Numerical Simulation - from Models to Software Introduction In numerical simulation, Partial Differential
Iterative methods for Linear System of Equations Joint Advanced Student School (JASS-2009) Course #2: Numerical Simulation - from Models to Software Introduction In numerical simulation, Partial Differential
Theory of Iterative Methods
 Based on Strang s Introduction to Applied Mathematics Theory of Iterative Methods The Iterative Idea To solve Ax = b, write Mx (k+1) = (M A)x (k) + b, k = 0, 1,,... Then the error e (k) x (k) x satisfies
Based on Strang s Introduction to Applied Mathematics Theory of Iterative Methods The Iterative Idea To solve Ax = b, write Mx (k+1) = (M A)x (k) + b, k = 0, 1,,... Then the error e (k) x (k) x satisfies
STA 294: Stochastic Processes & Bayesian Nonparametrics
 MARKOV CHAINS AND CONVERGENCE CONCEPTS Markov chains are among the simplest stochastic processes, just one step beyond iid sequences of random variables. Traditionally they ve been used in modelling a
MARKOV CHAINS AND CONVERGENCE CONCEPTS Markov chains are among the simplest stochastic processes, just one step beyond iid sequences of random variables. Traditionally they ve been used in modelling a
Computational Economics and Finance
 Computational Economics and Finance Part II: Linear Equations Spring 2016 Outline Back Substitution, LU and other decomposi- Direct methods: tions Error analysis and condition numbers Iterative methods:
Computational Economics and Finance Part II: Linear Equations Spring 2016 Outline Back Substitution, LU and other decomposi- Direct methods: tions Error analysis and condition numbers Iterative methods:
AMS526: Numerical Analysis I (Numerical Linear Algebra for Computational and Data Sciences)
") AMS526: Numerical Analysis I (Numerical Linear Algebra for Computational and Data Sciences) Lecture 19: Computing the SVD; Sparse Linear Systems Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical
AMS526: Numerical Analysis I (Numerical Linear Algebra for Computational and Data Sciences) Lecture 19: Computing the SVD; Sparse Linear Systems Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical
Computer Vision Group Prof. Daniel Cremers. 14. Sampling Methods
 Prof. Daniel Cremers 14. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 14. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Numerical Linear Algebra Primer. Ryan Tibshirani Convex Optimization
 Numerical Linear Algebra Primer Ryan Tibshirani Convex Optimization 10-725 Consider Last time: proximal Newton method min x g(x) + h(x) where g, h convex, g twice differentiable, and h simple. Proximal
Numerical Linear Algebra Primer Ryan Tibshirani Convex Optimization 10-725 Consider Last time: proximal Newton method min x g(x) + h(x) where g, h convex, g twice differentiable, and h simple. Proximal
M.A. Botchev. September 5, 2014
 Rome-Moscow school of Matrix Methods and Applied Linear Algebra 2014 A short introduction to Krylov subspaces for linear systems, matrix functions and inexact Newton methods. Plan and exercises. M.A. Botchev
Rome-Moscow school of Matrix Methods and Applied Linear Algebra 2014 A short introduction to Krylov subspaces for linear systems, matrix functions and inexact Newton methods. Plan and exercises. M.A. Botchev
CME342 Parallel Methods in Numerical Analysis. Matrix Computation: Iterative Methods II. Sparse Matrix-vector Multiplication.
 CME342 Parallel Methods in Numerical Analysis Matrix Computation: Iterative Methods II Outline: CG & its parallelization. Sparse Matrix-vector Multiplication. 1 Basic iterative methods: Ax = b r = b Ax
CME342 Parallel Methods in Numerical Analysis Matrix Computation: Iterative Methods II Outline: CG & its parallelization. Sparse Matrix-vector Multiplication. 1 Basic iterative methods: Ax = b r = b Ax
From Stationary Methods to Krylov Subspaces
 Week 6: Wednesday, Mar 7 From Stationary Methods to Krylov Subspaces Last time, we discussed stationary methods for the iterative solution of linear systems of equations, which can generally be written
Week 6: Wednesday, Mar 7 From Stationary Methods to Krylov Subspaces Last time, we discussed stationary methods for the iterative solution of linear systems of equations, which can generally be written
Introduction to Machine Learning CMU-10701
 Introduction to Machine Learning CMU-10701 Markov Chain Monte Carlo Methods Barnabás Póczos & Aarti Singh Contents Markov Chain Monte Carlo Methods Goal & Motivation Sampling Rejection Importance Markov
Introduction to Machine Learning CMU-10701 Markov Chain Monte Carlo Methods Barnabás Póczos & Aarti Singh Contents Markov Chain Monte Carlo Methods Goal & Motivation Sampling Rejection Importance Markov
Contribution of Wo¹niakowski, Strako²,... The conjugate gradient method in nite precision computa
 Contribution of Wo¹niakowski, Strako²,... The conjugate gradient method in nite precision computations ªaw University of Technology Institute of Mathematics and Computer Science Warsaw, October 7, 2006
Contribution of Wo¹niakowski, Strako²,... The conjugate gradient method in nite precision computations ªaw University of Technology Institute of Mathematics and Computer Science Warsaw, October 7, 2006
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 11 Partial Differential Equations Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002.
Scientific Computing: An Introductory Survey Chapter 11 Partial Differential Equations Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002.
7.2 Steepest Descent and Preconditioning
 7.2 Steepest Descent and Preconditioning Descent methods are a broad class of iterative methods for finding solutions of the linear system Ax = b for symmetric positive definite matrix A R n n. Consider
7.2 Steepest Descent and Preconditioning Descent methods are a broad class of iterative methods for finding solutions of the linear system Ax = b for symmetric positive definite matrix A R n n. Consider
Iterative Methods for Solving A x = b
 Iterative Methods for Solving A x = b A good (free) online source for iterative methods for solving A x = b is given in the description of a set of iterative solvers called templates found at netlib: http
Iterative Methods for Solving A x = b A good (free) online source for iterative methods for solving A x = b is given in the description of a set of iterative solvers called templates found at netlib: http
1. Fast Iterative Solvers of SLE
 1. Fast Iterative Solvers of crucial drawback of solvers discussed so far: they become slower if we discretize more accurate! now: look for possible remedies relaxation: explicit application of the multigrid
1. Fast Iterative Solvers of crucial drawback of solvers discussed so far: they become slower if we discretize more accurate! now: look for possible remedies relaxation: explicit application of the multigrid
AMS526: Numerical Analysis I (Numerical Linear Algebra)
") AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 21: Sensitivity of Eigenvalues and Eigenvectors; Conjugate Gradient Method Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical Analysis
AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 21: Sensitivity of Eigenvalues and Eigenvectors; Conjugate Gradient Method Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical Analysis
Notes for CS542G (Iterative Solvers for Linear Systems)
") Notes for CS542G (Iterative Solvers for Linear Systems) Robert Bridson November 20, 2007 1 The Basics We re now looking at efficient ways to solve the linear system of equations Ax = b where in this course,
Notes for CS542G (Iterative Solvers for Linear Systems) Robert Bridson November 20, 2007 1 The Basics We re now looking at efficient ways to solve the linear system of equations Ax = b where in this course,
APPLIED NUMERICAL LINEAR ALGEBRA
 APPLIED NUMERICAL LINEAR ALGEBRA James W. Demmel University of California Berkeley, California Society for Industrial and Applied Mathematics Philadelphia Contents Preface 1 Introduction 1 1.1 Basic Notation
APPLIED NUMERICAL LINEAR ALGEBRA James W. Demmel University of California Berkeley, California Society for Industrial and Applied Mathematics Philadelphia Contents Preface 1 Introduction 1 1.1 Basic Notation
The amount of work to construct each new guess from the previous one should be a small multiple of the number of nonzeros in A.
 AMSC/CMSC 661 Scientific Computing II Spring 2005 Solution of Sparse Linear Systems Part 2: Iterative methods Dianne P. O Leary c 2005 Solving Sparse Linear Systems: Iterative methods The plan: Iterative
AMSC/CMSC 661 Scientific Computing II Spring 2005 Solution of Sparse Linear Systems Part 2: Iterative methods Dianne P. O Leary c 2005 Solving Sparse Linear Systems: Iterative methods The plan: Iterative
A Search and Jump Algorithm for Markov Chain Monte Carlo Sampling. Christopher Jennison. Adriana Ibrahim. Seminar at University of Kuwait
 A Search and Jump Algorithm for Markov Chain Monte Carlo Sampling Christopher Jennison Department of Mathematical Sciences, University of Bath, UK http://people.bath.ac.uk/mascj Adriana Ibrahim Institute
A Search and Jump Algorithm for Markov Chain Monte Carlo Sampling Christopher Jennison Department of Mathematical Sciences, University of Bath, UK http://people.bath.ac.uk/mascj Adriana Ibrahim Institute
Classical iterative methods for linear systems
 Classical iterative methods for linear systems Ed Bueler MATH 615 Numerical Analysis of Differential Equations 27 February 1 March, 2017 Ed Bueler (MATH 615 NADEs) Classical iterative methods for linear
Classical iterative methods for linear systems Ed Bueler MATH 615 Numerical Analysis of Differential Equations 27 February 1 March, 2017 Ed Bueler (MATH 615 NADEs) Classical iterative methods for linear
Computational statistics
 Computational statistics Markov Chain Monte Carlo methods Thierry Denœux March 2017 Thierry Denœux Computational statistics March 2017 1 / 71 Contents of this chapter When a target density f can be evaluated
Computational statistics Markov Chain Monte Carlo methods Thierry Denœux March 2017 Thierry Denœux Computational statistics March 2017 1 / 71 Contents of this chapter When a target density f can be evaluated
Math/Phys/Engr 428, Math 529/Phys 528 Numerical Methods - Summer Homework 3 Due: Tuesday, July 3, 2018
 Math/Phys/Engr 428, Math 529/Phys 528 Numerical Methods - Summer 28. (Vector and Matrix Norms) Homework 3 Due: Tuesday, July 3, 28 Show that the l vector norm satisfies the three properties (a) x for x
Math/Phys/Engr 428, Math 529/Phys 528 Numerical Methods - Summer 28. (Vector and Matrix Norms) Homework 3 Due: Tuesday, July 3, 28 Show that the l vector norm satisfies the three properties (a) x for x
JACOBI S ITERATION METHOD
 ITERATION METHODS These are methods which compute a sequence of progressively accurate iterates to approximate the solution of Ax = b. We need such methods for solving many large linear systems. Sometimes
ITERATION METHODS These are methods which compute a sequence of progressively accurate iterates to approximate the solution of Ax = b. We need such methods for solving many large linear systems. Sometimes
Lecture # 20 The Preconditioned Conjugate Gradient Method
 Lecture # 20 The Preconditioned Conjugate Gradient Method We wish to solve Ax = b (1) A R n n is symmetric and positive definite (SPD). We then of n are being VERY LARGE, say, n = 10 6 or n = 10 7. Usually,
Lecture # 20 The Preconditioned Conjugate Gradient Method We wish to solve Ax = b (1) A R n n is symmetric and positive definite (SPD). We then of n are being VERY LARGE, say, n = 10 6 or n = 10 7. Usually,
Numerical Linear Algebra Primer. Ryan Tibshirani Convex Optimization /36-725
 Numerical Linear Algebra Primer Ryan Tibshirani Convex Optimization 10-725/36-725 Last time: proximal gradient descent Consider the problem min g(x) + h(x) with g, h convex, g differentiable, and h simple
Numerical Linear Algebra Primer Ryan Tibshirani Convex Optimization 10-725/36-725 Last time: proximal gradient descent Consider the problem min g(x) + h(x) with g, h convex, g differentiable, and h simple
1 Conjugate gradients
 Notes for 2016-11-18 1 Conjugate gradients We now turn to the method of conjugate gradients (CG), perhaps the best known of the Krylov subspace solvers. The CG iteration can be characterized as the iteration
Notes for 2016-11-18 1 Conjugate gradients We now turn to the method of conjugate gradients (CG), perhaps the best known of the Krylov subspace solvers. The CG iteration can be characterized as the iteration
Iterative Methods for Ax=b
 1 FUNDAMENTALS 1 Iterative Methods for Ax=b 1 Fundamentals consider the solution of the set of simultaneous equations Ax = b where A is a square matrix, n n and b is a right hand vector. We write the iterative
1 FUNDAMENTALS 1 Iterative Methods for Ax=b 1 Fundamentals consider the solution of the set of simultaneous equations Ax = b where A is a square matrix, n n and b is a right hand vector. We write the iterative
OUTLINE ffl CFD: elliptic pde's! Ax = b ffl Basic iterative methods ffl Krylov subspace methods ffl Preconditioning techniques: Iterative methods ILU
 Preconditioning Techniques for Solving Large Sparse Linear Systems Arnold Reusken Institut für Geometrie und Praktische Mathematik RWTH-Aachen OUTLINE ffl CFD: elliptic pde's! Ax = b ffl Basic iterative
Preconditioning Techniques for Solving Large Sparse Linear Systems Arnold Reusken Institut für Geometrie und Praktische Mathematik RWTH-Aachen OUTLINE ffl CFD: elliptic pde's! Ax = b ffl Basic iterative
Lecture 4 Basic Iterative Methods I
 March 26, 2018 Lecture 4 Basic Iterative Methods I A The Power Method Let A be an n n with eigenvalues λ 1,...,λ n counted according to multiplicity. We assume the eigenvalues to be ordered in absolute
March 26, 2018 Lecture 4 Basic Iterative Methods I A The Power Method Let A be an n n with eigenvalues λ 1,...,λ n counted according to multiplicity. We assume the eigenvalues to be ordered in absolute
Computational Methods. Systems of Linear Equations
 Computational Methods Systems of Linear Equations Manfred Huber 2010 1 Systems of Equations Often a system model contains multiple variables (parameters) and contains multiple equations Multiple equations
Computational Methods Systems of Linear Equations Manfred Huber 2010 1 Systems of Equations Often a system model contains multiple variables (parameters) and contains multiple equations Multiple equations
Lecture 11. Fast Linear Solvers: Iterative Methods. J. Chaudhry. Department of Mathematics and Statistics University of New Mexico
 Lecture 11 Fast Linear Solvers: Iterative Methods J. Chaudhry Department of Mathematics and Statistics University of New Mexico J. Chaudhry (UNM) Math/CS 375 1 / 23 Summary: Complexity of Linear Solves
Lecture 11 Fast Linear Solvers: Iterative Methods J. Chaudhry Department of Mathematics and Statistics University of New Mexico J. Chaudhry (UNM) Math/CS 375 1 / 23 Summary: Complexity of Linear Solves
Solving Ax = b, an overview. Program
 Numerical Linear Algebra Improving iterative solvers: preconditioning, deflation, numerical software and parallelisation Gerard Sleijpen and Martin van Gijzen November 29, 27 Solving Ax = b, an overview
Numerical Linear Algebra Improving iterative solvers: preconditioning, deflation, numerical software and parallelisation Gerard Sleijpen and Martin van Gijzen November 29, 27 Solving Ax = b, an overview
The Particle Filter. PD Dr. Rudolph Triebel Computer Vision Group. Machine Learning for Computer Vision
 The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
University of Toronto Department of Statistics
 Norm Comparisons for Data Augmentation by James P. Hobert Department of Statistics University of Florida and Jeffrey S. Rosenthal Department of Statistics University of Toronto Technical Report No. 0704
Norm Comparisons for Data Augmentation by James P. Hobert Department of Statistics University of Florida and Jeffrey S. Rosenthal Department of Statistics University of Toronto Technical Report No. 0704
ITERATIVE PROJECTION METHODS FOR SPARSE LINEAR SYSTEMS AND EIGENPROBLEMS CHAPTER 3 : SEMI-ITERATIVE METHODS
 ITERATIVE PROJECTION METHODS FOR SPARSE LINEAR SYSTEMS AND EIGENPROBLEMS CHAPTER 3 : SEMI-ITERATIVE METHODS Heinrich Voss voss@tu-harburg.de Hamburg University of Technology Institute of Numerical Simulation
ITERATIVE PROJECTION METHODS FOR SPARSE LINEAR SYSTEMS AND EIGENPROBLEMS CHAPTER 3 : SEMI-ITERATIVE METHODS Heinrich Voss voss@tu-harburg.de Hamburg University of Technology Institute of Numerical Simulation
Spatial Statistics with Image Analysis. Outline. A Statistical Approach. Johan Lindström 1. Lund October 6, 2016
 Spatial Statistics Spatial Examples More Spatial Statistics with Image Analysis Johan Lindström 1 1 Mathematical Statistics Centre for Mathematical Sciences Lund University Lund October 6, 2016 Johan Lindström
Spatial Statistics Spatial Examples More Spatial Statistics with Image Analysis Johan Lindström 1 1 Mathematical Statistics Centre for Mathematical Sciences Lund University Lund October 6, 2016 Johan Lindström
Course Notes: Week 1
 Course Notes: Week 1 Math 270C: Applied Numerical Linear Algebra 1 Lecture 1: Introduction (3/28/11) We will focus on iterative methods for solving linear systems of equations (and some discussion of eigenvalues
Course Notes: Week 1 Math 270C: Applied Numerical Linear Algebra 1 Lecture 1: Introduction (3/28/11) We will focus on iterative methods for solving linear systems of equations (and some discussion of eigenvalues
Introduction to Scientific Computing
 (Lecture 5: Linear system of equations / Matrix Splitting) Bojana Rosić, Thilo Moshagen Institute of Scientific Computing Motivation Let us resolve the problem scheme by using Kirchhoff s laws: the algebraic
(Lecture 5: Linear system of equations / Matrix Splitting) Bojana Rosić, Thilo Moshagen Institute of Scientific Computing Motivation Let us resolve the problem scheme by using Kirchhoff s laws: the algebraic
Reversible Markov chains
 Reversible Markov chains Variational representations and ordering Chris Sherlock Abstract This pedagogical document explains three variational representations that are useful when comparing the efficiencies
Reversible Markov chains Variational representations and ordering Chris Sherlock Abstract This pedagogical document explains three variational representations that are useful when comparing the efficiencies
The convergence of stationary iterations with indefinite splitting
 The convergence of stationary iterations with indefinite splitting Michael C. Ferris Joint work with: Tom Rutherford and Andy Wathen University of Wisconsin, Madison 6th International Conference on Complementarity
The convergence of stationary iterations with indefinite splitting Michael C. Ferris Joint work with: Tom Rutherford and Andy Wathen University of Wisconsin, Madison 6th International Conference on Complementarity
Efficient Variational Inference in Large-Scale Bayesian Compressed Sensing
 Efficient Variational Inference in Large-Scale Bayesian Compressed Sensing George Papandreou and Alan Yuille Department of Statistics University of California, Los Angeles ICCV Workshop on Information
Efficient Variational Inference in Large-Scale Bayesian Compressed Sensing George Papandreou and Alan Yuille Department of Statistics University of California, Los Angeles ICCV Workshop on Information
PETROV-GALERKIN METHODS
 Chapter 7 PETROV-GALERKIN METHODS 7.1 Energy Norm Minimization 7.2 Residual Norm Minimization 7.3 General Projection Methods 7.1 Energy Norm Minimization Saad, Sections 5.3.1, 5.2.1a. 7.1.1 Methods based
Chapter 7 PETROV-GALERKIN METHODS 7.1 Energy Norm Minimization 7.2 Residual Norm Minimization 7.3 General Projection Methods 7.1 Energy Norm Minimization Saad, Sections 5.3.1, 5.2.1a. 7.1.1 Methods based
Comparison of Fixed Point Methods and Krylov Subspace Methods Solving Convection-Diffusion Equations
 American Journal of Computational Mathematics, 5, 5, 3-6 Published Online June 5 in SciRes. http://www.scirp.org/journal/ajcm http://dx.doi.org/.436/ajcm.5.5 Comparison of Fixed Point Methods and Krylov
American Journal of Computational Mathematics, 5, 5, 3-6 Published Online June 5 in SciRes. http://www.scirp.org/journal/ajcm http://dx.doi.org/.436/ajcm.5.5 Comparison of Fixed Point Methods and Krylov
Advances and Applications in Perfect Sampling
 and Applications in Perfect Sampling Ph.D. Dissertation Defense Ulrike Schneider advisor: Jem Corcoran May 8, 2003 Department of Applied Mathematics University of Colorado Outline Introduction (1) MCMC
and Applications in Perfect Sampling Ph.D. Dissertation Defense Ulrike Schneider advisor: Jem Corcoran May 8, 2003 Department of Applied Mathematics University of Colorado Outline Introduction (1) MCMC
Numerical Methods I: Eigenvalues and eigenvectors
 1/25 Numerical Methods I: Eigenvalues and eigenvectors Georg Stadler Courant Institute, NYU stadler@cims.nyu.edu November 2, 2017 Overview 2/25 Conditioning Eigenvalues and eigenvectors How hard are they
1/25 Numerical Methods I: Eigenvalues and eigenvectors Georg Stadler Courant Institute, NYU stadler@cims.nyu.edu November 2, 2017 Overview 2/25 Conditioning Eigenvalues and eigenvectors How hard are they