Advanced Mechanical Elements
|
|
|
- Reynold Glenn
- 5 years ago
- Views:
Transcription

1 May 3, 08 Advanced Mechancal Elements (Lecture 7) Knematc analyss and moton control of underactuated mechansms wth elastc elements - Moton control of underactuated mechansms constraned by elastc elements or gravtatonal force- Tokyo Insttute of Technology Dept. of Mechancal Engneerng School of Engneerng Prof. Nobuyuk Iwatsuk
2 . nderactuated Mechansms Ordnary mechansm n whch a number of actuators s equal to DO. Output moton can be determned by gvng two crank nputs. P (x P,y P ) M θ M θ Planar 5-bar lnk mechansm wth DOand actuators
3 Overactuator mechansm n whch a number of actuators s more than to DO. All actuators should be drven dependently to each other. P (x P,y P ) θ 3 Explaned n last lecture M M θ M θ Planar 5-bar lnk mechansm wth DOand 3 actuators
4 nderactuated mechansm n whch a number of actuators s less than DO. Output moton cannot be determned by gvng only one crank nput. P (x P,y P ) θ M θ Planar 5-bar lnk mechansm wth DOand actuator
5 nderactuated mechansm constraned wth an elastc element Dependent output motons are determned so as to mnmze potental energy. P (x P,y P ) θ M θ Planar 5-bar lnk mechansm wth DOand actuator
6 nderactuated mechansm constraned wth an elastc element Dependent output motons are determned so as to mnmze potental energy. P (x P,y P ) Mechansm wll be drven so that the added sprng becomes ts natural length. θ M θ Planar 5-bar lnk mechansm wth DOand actuator
7 nderactuated mechansm constraned wth an elastc element Dependent output motons are determned so as to mnmze potental energy. P (x P,y P ) In case where the mechansm s constraned wth more complcated combnaton of sprngs. θ M θ? Planar 5-bar lnk mechansm wth DOand actuator
8 . Knetostatcs Analyss of nderactuated Mechansms wth Elastc Elements. orce and moment applyng to mechansm Let assume jont forces and a drvng torque and a vrtual torque and sprng forces J S3 3 J 3 4 J S4 τ 4 θ τ P θ Planar 5-bar lnk mechansm wth DOand actuator M P (x P,y P ) J S - S S J 4 J S - S J S J
9 . Statcs equaton S S S S τ τ S S S P S P S P S P S S J J J 0 J J P 0 J P J 0 J J J 0 Statcs equaton for each lnk where poston vectors, P, J 3, J 4, J S3, J S4 and sprng forces, S, S are gven as functons wth respect to jont angle θ
10 .3 orward analyss [ ] [ ] ) ( ) ( θ P b A τ τ θ [ ] [ ] ) ( ) ( θ P b A θ τ τ Inverse statcs analyss The assumed vrtual torque τ 4 should be zero. Nonlnear equaton wth respect to θ, τ 4 (θ )0, can be solved wth numercal method.
11 .4 Inverse analyss [ ] [ ] ) ( ) ( θ P b A τ τ θ [ ] [ ] ) ( ) ( θ P b A θ τ τ Inverse statcs analyss Nonlnear equaton wth respect to θ, τ 4 (θ )0, can be solved wth numercal method. After specfyng desred output moton, θ, poston vectors, P, J 3, J 4, J S3, J S4 and sprng forces, S, S are gven as functons wth respect to jont angle θ
12 Parallel manpulator wth Remote Center Complance 3. Applcaton to Spatal Parallel Mechansms 3. Expected applcaton utlzng flexblty Postonng wth remote center complance M M M nderactuated parallel mechansm constraned wth elastc elements
13 3. Example Amng to develop a novel flexble jonts wth mult-do, underactuated spatal parallel mechansms constraned wth several elastc elements are proposed. ()Inverse knematcs analyss based on statcs analyss wth vrtual forces s proposed and formulated. ()or an example, 6-RS spatal parallel mechansm wth 3 rotary actuators and 3 torsonal sprngs s analyzed. R X x S θ P Z z O xed platform Movng platform y Y Rotary actuator Torsonal sprng
14 3.3 Inverse Knetostatcs analyss of 6-RS spatal parallel mechansm Inverse knematcs based on RS chan S Z z Movng platform Poston and posture of movng platform are gven. x P y Postons of sphercal pars can be calculated. R O xed platform Input angles of revolute pars and angular dsplacements of unversal pars can be determned wth knematcs of RS lnk chans. Y X θ Rotary actuator 6-RS spatal parallel mechansm wth 6 DO
15 //K R Relatve poston of sphercal par from unversal par s specfed. Q Poston s specfed. S Sphercal par R R R S x H z R S nversal par Z u R Relatve poston of unversal par from revolute par s specfed. H R x R K R H y H Poston and posture are specfed. R Revolute par y R X O Y RS two adjacent lnk chan
16 A crcle Q passng through //K R S Sphercal par S A plane passng Z through perpendcular to axs of R Sphere nversal par R R R S x H z R u R H can be calculated. O Y X RS two adjacent lnk chan R x R K R H A crcle passng through y H Cylnder R Revolute par Resultantly postons of all pars y R nversal par must be located at the ntersecton between sphere and crcle
17 Inverse statcs of mechansm wth sprngs orce and moment balance S Z z Movng platform Vrtual force to balance sprng forces V x P orce and moment actng on passve jonts y J, N J R X θ O xed platform m g Y Rotary actuator Torsonal sprng Gravtatonal force orce and moment actng on actve jonts A, N A 6-RS spatal parallel mechansm constraned wth sprngs
18 Statcs equaton: 0 G S 0, g 6, 6, ) ( JS P P V JS m Movng plate: 6) ( ) ( ) (,,,,,,,, ~ m J J JS J JS 0 N G G S - 0, g - pper lnks:,3,5) ( - ) ( ) (,,,,,,, m A, JR, J, JR L J L L JR J 0 N N N G R G - 0, g - Lower lnks wth actuator: [ ],4,6) ( ) ( ) ( T,,,,,,, K T m R, JR, J, JR L J L L JR J 0 N N G R G - 0, g - θ Lower lnks wth sprng: [ ],4,6), ( 0 0 0, T T A R, N Constrants:
19 A system of 78 lnear equatons wth respect to 78 unknowns of jont forces and moments, drvng torques and vrtual forces: S,,X N S,,Y S,,Z,,X [ A] [ b],4,x V,X V,Y V,Z Vrtual forces: V,X, V,Y, V,Z can be calculated wth Gauss-Jordan method.
20 Inverse knetostatcs analyss of 6-RS spatal parallel mechansm wth sprngs The assumed vrtual forces, V,X, V,Y, V,Z should be zeros. Procedure to obtan the balanced confguraton of the mechansm wth sprngs: ()Specfy translatonal moton of movng platform, X, Y, Z ()Assume angular moton of movng platform, α, β, γ, as varables (3)Inverse statcs analyss to calculate vrtual forces, V,X, V,Y, V,Z
21 Example of nverse knetostatcs analyss of 6-RS spatal parallel mechansm wth sprngs S Z z γ Movng platform Gven translatonal moton Y X x α P (X,Y,Z) y β Z R O xed platform Y Determned angular moton α β γ X θθ Rotary actuator Torsonal sprng Determned nput moton θ 4 θ 5 θ Smooth dsplacement can be obtaned. θ θ 3 θ 6
22
23 4. Knetostatcs Analyss of Wre-drven nderactuated Mechansms Constraned by Gravtatonal orce Moton Control of Maronette
24 4. Wre-drven mechansms Conventonal Wre-drven Mechansms Q P Q P J Pullng force O (X,Y) j J θ J 3 J 4 Output lnk 4 3 P Q 4 3 Q 4 P 3 A planar wre-drven mechansm Wre Motor and pulley
25 Inverse knematcs: 0 ) ( ) ( cos sn sn cos Y X l P P P Q J j J J θ θ θ θ Inverse statcs: 0 0 ) ( > Y X J J J 0 J J P P P P Wre cannot generate pushng force! [ ] b A [ ] [ ] [ ] k A A I b A ) ( 3 4 # # The both of knematcs and statcs should be taken nto account. (Wre tenson should be controlled.) Number of wres should be more than DO because wre cannot generate pushng force.
26 nderactuated Wre-drven Mechansms 6 DO Controller 6 DO Control lnk chan (4 DO) Output lnk chan (5 DO) Wres 6 DO A general wre-drven mechansm (6 DO crane) Poston and posture control of movng table by adjustng wre lengths and wre wngng poston Puppet Output An example lnk chan of underactuated can 7 be DO drven wth wres wre-drven wth constant mechansm length Maronette nderactuated as a typcal mechansm mechansm
27 Maronette: An underactuated wre-drven mechansm Manpulated by a puppeteer wth a good skll to express human or anmal s moton It s dffcult to determne the optmum moton of controller for desred moton of puppet. Reasons: Lack of controllable DO Wre-drven Not only knematcs but also statcs due to gravtatonal force Controller 6 DO Puppet Wres 7 DO
28 Some researchers deal wth a maronette wth controller wth enough DO or drectly control wre length. It s thus expected to establsh the control method for underactuated maronette or the desgn method for optmum controller. Objectves To establsh the general control method to generate the desred moton of planar and spatal underactuated wre-drven lnk mechansms based on knetostatcs analyses Controller 6 DO Puppet Wres 7 DO
29 4. Smple example of planar wre-drven underactuated lnk chan Wre-drven three lnks chan Two lnks controller wth 4DO Poston of revolute jont C (DO) Posture angles λ, λ (DO) Three lnks output chan wth 5DO Poston of pont J (DO) Posture angles φ, φ, φ 3 (3DO) φ φ 3 φ The smplest underacutuated wre-drven mechansm φ A wre-drven three lnks chan
30 orward analyss Confguraton of controller: C, λ, λ Confguraton of lnk chan: J, φ, φ, φ 3 To obtan confguraton of output lnk chan, whch has the mnmum potental energy φ φ 3 φ φ A wre-drven three lnks chan
31 Procedure: ()Specfy confguraton of controller C, λ, λ ()Obtan wre connectng ponts S, S Wres can be assumed rgd and massless (3)Assume posture angles θ, θ (4)Obtan wre connectng ponts J, J 4 (5)Assume lnk angle φ (6)Jont J 3 can be calculated (7)Jont J can be calculated because J s located at center of adjacent lnks Confguraton of output lnk chan can be determned wth respect to θ, θ, φ. J J A wre-drven three lnks chan J 3 J 4 φ
32 (8)Calculate center of gravty of lnks, G (θ,θ,φ) (9)Calculate of y-coordnate of center of gravty of output lnk chan m yg, ( θ, θ, φ) Φ θ θ φ y Objectve functon: (,, ) G Desgn varables m Optmzaton wth the gradent method Mnmzaton of potental energy φ Confguraton of underactuated wre-drven mechansm can be determned wth the obtaned θ,θ,φ A wre-drven three lnks chan
33 Example of forward analyss In case where C moves along a straght lne and control lnks becomes open Moton of output lnk chan can be calculated. 0
34 Inverse analyss Confguraton of controller: Confguraton of lnk chan: J, φ, φ, φ 3 C, λ, λ orce balance (3)Solve statc equatons, τ ) ( ) ( 0 ) ( ) (, 0 ) ( ) (, G J G J g G J G J g G J G J g m m m Procedure: ()Specfy confguraton of lnk chan J, φ, φ, φ 3 φ φ φ 3 ()Assume jont forces, gravtatonal forces m g, vrtual torque τ
Control lnk cannot reach S*, S* )Vrtual torque s not equal to")
35 Wre connectng ponts S*, S* should be located n drecton of forces, 4 (4) S*, S* can be calculated as w * w J, S 4 J 4 4 * S (5) Confguraton of control lnk, C, λ, λ, can be calculated wth S*, S* However, there exsts mpossble Confguraton: )Control lnk cannot reach S*, S* )Vrtual torque s not equal to zero
36 (6)Modfy confguraton of output lnk Modfyng wth optmzaton Objectve functon : * Φ ( ψ * ) p S S p τ j Desgn varable To make controller reach to wre connectng ponts j To make modfcaton small max To make vrtual torques zero Set the lnk angle whch has maxmum senstvty Φ φ as desgn varable φ ψ φ φ 3 Possble confguraton of output lnk chan can be obtaned wth the gradent method φ
37 Example of nverse analyss Specfed Modfed Expected confguraton of output lnk chan can be calculated wth nverse analyss.
38 Wre angles Drectons of wre agree wth those of forces Vrtual torque before and after orce modfcaton angles Confguraton can be correctly modfed
39 4.3 Moton Plannng of Human Type Maronettes A planar maronette Controller A controller wth 5 DO: Poston of trple revolute jont: C (DO) Posture angles: λ, λ, λ 3 (3DO) Wre A puppet wth DO: Left hand and rght foot are connected wth a control bar. Rght hand and left foot are connected wth a control bar. Puppet It s just an underactuated mechansm however does not requre vrtual torque.
40 orward analyss Confguraton of controller: C, λ, λ, λ 3 Same procedure as two-lnk chan : ()Specfy confguraton of controller: C, λ, λ, λ 3 ()Obtan wre connectng ponts: S,,S 6 (3)Assume posture angles of massless wres, θ,,θ 6 (4)Obtan wre connectng ponts: J, J 4, J 6, J 8, J 0, J (5)Obtan confguraton of puppet based on knematcs (6)Obtan center of gravty of lnks (7)Solve the optmum wre angles whch mnmze potental energy of whole puppet (8)orward analyss s completed Confguraton of puppet: J,, J Two lnks chans are sequentally determned θ 5 θ θ 4 θ 3 θ 6 θ
41 Inverse analyss Confguraton of puppet: Confguraton of controller: J,, J C, λ, λ, λ 3 Same procedure as two-lnk chan : ()Specfy confguraton of puppet J,, J ()Inverse statcs analyss 30 varables (3)Determne drecton of wres (4)Obtan wre connectng ponts on a controller: S *,.., S 6 *
42 (5)Determne confguraton of a controller Generally no soluton due to lack of DO (6)Optmze the rotatng angle of lnk chan n the puppet to satsfy the constrant Desgn varables: Rotaton angles of lnk chans about J, J : ψ (,,3,4) ψ ψ J J ψ 4 ψ 4 Objectve functon: Summaton of dstances between S* k and S k : Φ ( ψ, ψ, ψ, ψ S * I 3 4) k k S k It should be zero.
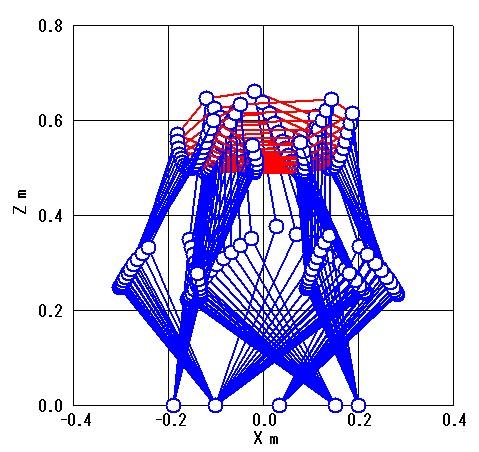
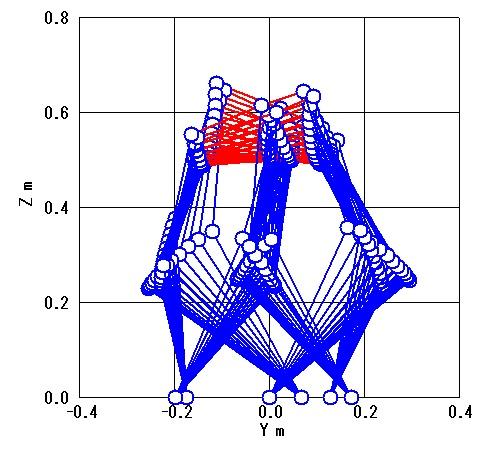
43 Example of nverse analyss of maronette Specfcatons of planar maronette 0
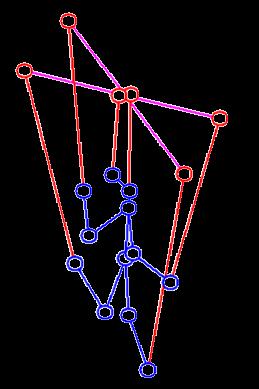
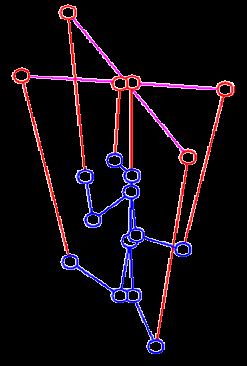
44 Squattng Runnng Specfed Modfed An example of nverse analyss of a planar human type maronette

45 Experments Lnks are made of acrylc plate wth 4mm n thckness. Revolute jonts are metal shaft wth screws at both ends and two bolts as flange. Wres are cotton thread.





46 Maxmum error jont angle of 5.3 The prototype maronette can generate the desred confguratons calculated wth the proposed nverse analyss 6
47 5. Concludng remarks Amng to control underactuated lnk mechansms constraned wth elastc elements or gravtatonal force, forward/nverse knetostatcs analyses are establshed. ()Inverse knetostatc analyss based on statcs analyss takng account of vrtual torque and soluton of nonlnear equatons wth respect to unknown jont varables s proposed. ()A planar 5-bar mechansm wth DO and actuator and a spatal 6RS parallel manpulator wth 6 DO and 3 actuators are analyzed. (3)The confguraton of lnk chan hung wth several wres can be calculated wth the optmzaton to mnmze the vertcal poston of center of gravty of the chan.
48 (4)The confguraton of controller can be calculated wth wre drectons based on the nverse analyss and the optmzaton of the modfyng angles of lnk chans. (5)Moton plannng of planar human type maronette can be acheved wth the proposed nverse knetostatcs. (6)The proposed method was expermentally valdated wth prototypes of the human type maronettes composed of lnks of acrylc bars and cotton threads.
49 Concludng remarks for whole lecture Through ths lecture, you are expected to be able to: () Explan moblty of mechansm and relaton between nput/output moton of mechansm () Analyze dsplacement, velocty and acceleraton of planar/spatal closed-loop lnk mechansm wth the systematc knematc analyss method (3) Analyze the dynamcs of planar/spatal closed-loop lnk mechansm utlzng the systematc knematc analyss method (4) Explan the optmum moton control of redundant lnk mechansms (5) Explan moton control of overactuated or underactuated mechansm wth elastc elements
50 Important ssues explaned n ths lecture are as follows: ()Knematc analyses of planar/spatal lnk mechansm wth the systematc knematc analyss method Dsplacement, velocty and acceleraton analyses of planar/spatal closed-loop lnk mechansm can be easly acheved. ()Dynamc analyses of planar/spatal lnk mechansm Drvng forces and jont forces can be analyzed usng the systematc knematc analyss. (3)Optmum moton control of redundant lnk mechansms Dexterty can be maxmzed by utlzng redundancy.
51 (4)Moton control of overactuated lnk mechansms Overactuated mechansms can be controlled wth the relaxaton of nterference by addtonal elastc elements. (5)Moton control of underactuated lnk mechansms nderactuated mechansms constraned wth elastc elements can be controlled by takng account of knematcs and statcs. (6)Moton control of wre-drven underactuated lnk mechansms Maronette can be theoretcally controlled.
52 Subject of fnal report Calculate the desred nput motons for the target output moton, (X,Y), of the planar sx lnk mechansm wth only revolute pars shown n the next page under the followng condtons. ()You can locate rotary actuators at revolute pars. Note: The mechansm wll become a redundant mechansm. Therefore you have to acheve the optmum nverse knematcs wth a certan objectve functon based on nematc performance or knetc performance. ()You can determne lnk dmensons arbtrarly. (3)The target trajectory should be a straght lne. You can determne ts parameters a and b and ther tme hstory. (4)You wll show tme hstores of output/nput motons. The report wll be summarzed n A4 sze PD wth less than 0 pages and sent to nob@mep.ttech.ac.jp by June 6, 08.
53 Target trajectory YaXb Output pont (X,Y) R R Y R R O X R R A planar 6 lnk mechansm wth only revolute pars
Modeling of Dynamic Systems
 Modelng of Dynamc Systems Ref: Control System Engneerng Norman Nse : Chapters & 3 Chapter objectves : Revew the Laplace transform Learn how to fnd a mathematcal model, called a transfer functon Learn how
Modelng of Dynamc Systems Ref: Control System Engneerng Norman Nse : Chapters & 3 Chapter objectves : Revew the Laplace transform Learn how to fnd a mathematcal model, called a transfer functon Learn how
Design and Analysis of Landing Gear Mechanic Structure for the Mine Rescue Carrier Robot
 Sensors & Transducers 214 by IFSA Publshng, S. L. http://www.sensorsportal.com Desgn and Analyss of Landng Gear Mechanc Structure for the Mne Rescue Carrer Robot We Juan, Wu Ja-Long X an Unversty of Scence
Sensors & Transducers 214 by IFSA Publshng, S. L. http://www.sensorsportal.com Desgn and Analyss of Landng Gear Mechanc Structure for the Mne Rescue Carrer Robot We Juan, Wu Ja-Long X an Unversty of Scence
Physics 111: Mechanics Lecture 11
 Physcs 111: Mechancs Lecture 11 Bn Chen NJIT Physcs Department Textbook Chapter 10: Dynamcs of Rotatonal Moton q 10.1 Torque q 10. Torque and Angular Acceleraton for a Rgd Body q 10.3 Rgd-Body Rotaton
Physcs 111: Mechancs Lecture 11 Bn Chen NJIT Physcs Department Textbook Chapter 10: Dynamcs of Rotatonal Moton q 10.1 Torque q 10. Torque and Angular Acceleraton for a Rgd Body q 10.3 Rgd-Body Rotaton
Physics 53. Rotational Motion 3. Sir, I have found you an argument, but I am not obliged to find you an understanding.
 Physcs 53 Rotatonal Moton 3 Sr, I have found you an argument, but I am not oblged to fnd you an understandng. Samuel Johnson Angular momentum Wth respect to rotatonal moton of a body, moment of nerta plays
Physcs 53 Rotatonal Moton 3 Sr, I have found you an argument, but I am not oblged to fnd you an understandng. Samuel Johnson Angular momentum Wth respect to rotatonal moton of a body, moment of nerta plays
Physics 5153 Classical Mechanics. Principle of Virtual Work-1
 P. Guterrez 1 Introducton Physcs 5153 Classcal Mechancs Prncple of Vrtual Work The frst varatonal prncple we encounter n mechancs s the prncple of vrtual work. It establshes the equlbrum condton of a mechancal
P. Guterrez 1 Introducton Physcs 5153 Classcal Mechancs Prncple of Vrtual Work The frst varatonal prncple we encounter n mechancs s the prncple of vrtual work. It establshes the equlbrum condton of a mechancal
Rotational Dynamics. Physics 1425 Lecture 19. Michael Fowler, UVa
 Rotatonal Dynamcs Physcs 1425 Lecture 19 Mchael Fowler, UVa Rotatonal Dynamcs Newton s Frst Law: a rotatng body wll contnue to rotate at constant angular velocty as long as there s no torque actng on t.
Rotatonal Dynamcs Physcs 1425 Lecture 19 Mchael Fowler, UVa Rotatonal Dynamcs Newton s Frst Law: a rotatng body wll contnue to rotate at constant angular velocty as long as there s no torque actng on t.
CHAPTER 6. LAGRANGE S EQUATIONS (Analytical Mechanics)
") CHAPTER 6 LAGRANGE S EQUATIONS (Analytcal Mechancs) 1 Ex. 1: Consder a partcle movng on a fxed horzontal surface. r P Let, be the poston and F be the total force on the partcle. The FBD s: -mgk F 1 x O
CHAPTER 6 LAGRANGE S EQUATIONS (Analytcal Mechancs) 1 Ex. 1: Consder a partcle movng on a fxed horzontal surface. r P Let, be the poston and F be the total force on the partcle. The FBD s: -mgk F 1 x O
coordinates. Then, the position vectors are described by
 Revewng, what we have dscussed so far: Generalzed coordnates Any number of varables (say, n) suffcent to specfy the confguraton of the system at each nstant to tme (need not be the mnmum number). In general,
Revewng, what we have dscussed so far: Generalzed coordnates Any number of varables (say, n) suffcent to specfy the confguraton of the system at each nstant to tme (need not be the mnmum number). In general,
Part C Dynamics and Statics of Rigid Body. Chapter 5 Rotation of a Rigid Body About a Fixed Axis
 Part C Dynamcs and Statcs of Rgd Body Chapter 5 Rotaton of a Rgd Body About a Fxed Axs 5.. Rotatonal Varables 5.. Rotaton wth Constant Angular Acceleraton 5.3. Knetc Energy of Rotaton, Rotatonal Inerta
Part C Dynamcs and Statcs of Rgd Body Chapter 5 Rotaton of a Rgd Body About a Fxed Axs 5.. Rotatonal Varables 5.. Rotaton wth Constant Angular Acceleraton 5.3. Knetc Energy of Rotaton, Rotatonal Inerta
First Law: A body at rest remains at rest, a body in motion continues to move at constant velocity, unless acted upon by an external force.
 Secton 1. Dynamcs (Newton s Laws of Moton) Two approaches: 1) Gven all the forces actng on a body, predct the subsequent (changes n) moton. 2) Gven the (changes n) moton of a body, nfer what forces act
Secton 1. Dynamcs (Newton s Laws of Moton) Two approaches: 1) Gven all the forces actng on a body, predct the subsequent (changes n) moton. 2) Gven the (changes n) moton of a body, nfer what forces act
Iterative General Dynamic Model for Serial-Link Manipulators
 EEL6667: Knematcs, Dynamcs and Control of Robot Manpulators 1. Introducton Iteratve General Dynamc Model for Seral-Lnk Manpulators In ths set of notes, we are gong to develop a method for computng a general
EEL6667: Knematcs, Dynamcs and Control of Robot Manpulators 1. Introducton Iteratve General Dynamc Model for Seral-Lnk Manpulators In ths set of notes, we are gong to develop a method for computng a general
A Tale of Friction Basic Rollercoaster Physics. Fahrenheit Rollercoaster, Hershey, PA max height = 121 ft max speed = 58 mph
 A Tale o Frcton Basc Rollercoaster Physcs Fahrenhet Rollercoaster, Hershey, PA max heght = 11 t max speed = 58 mph PLAY PLAY PLAY PLAY Rotatonal Movement Knematcs Smlar to how lnear velocty s dened, angular
A Tale o Frcton Basc Rollercoaster Physcs Fahrenhet Rollercoaster, Hershey, PA max heght = 11 t max speed = 58 mph PLAY PLAY PLAY PLAY Rotatonal Movement Knematcs Smlar to how lnear velocty s dened, angular
Week 9 Chapter 10 Section 1-5
 Week 9 Chapter 10 Secton 1-5 Rotaton Rgd Object A rgd object s one that s nondeformable The relatve locatons of all partcles makng up the object reman constant All real objects are deformable to some extent,
Week 9 Chapter 10 Secton 1-5 Rotaton Rgd Object A rgd object s one that s nondeformable The relatve locatons of all partcles makng up the object reman constant All real objects are deformable to some extent,
Week3, Chapter 4. Position and Displacement. Motion in Two Dimensions. Instantaneous Velocity. Average Velocity
 Week3, Chapter 4 Moton n Two Dmensons Lecture Quz A partcle confned to moton along the x axs moves wth constant acceleraton from x =.0 m to x = 8.0 m durng a 1-s tme nterval. The velocty of the partcle
Week3, Chapter 4 Moton n Two Dmensons Lecture Quz A partcle confned to moton along the x axs moves wth constant acceleraton from x =.0 m to x = 8.0 m durng a 1-s tme nterval. The velocty of the partcle
Study Guide For Exam Two
 Study Gude For Exam Two Physcs 2210 Albretsen Updated: 08/02/2018 All Other Prevous Study Gudes Modules 01-06 Module 07 Work Work done by a constant force F over a dstance s : Work done by varyng force
Study Gude For Exam Two Physcs 2210 Albretsen Updated: 08/02/2018 All Other Prevous Study Gudes Modules 01-06 Module 07 Work Work done by a constant force F over a dstance s : Work done by varyng force
Study on Active Micro-vibration Isolation System with Linear Motor Actuator. Gong-yu PAN, Wen-yan GU and Dong LI
 2017 2nd Internatonal Conference on Electrcal and Electroncs: echnques and Applcatons (EEA 2017) ISBN: 978-1-60595-416-5 Study on Actve Mcro-vbraton Isolaton System wth Lnear Motor Actuator Gong-yu PAN,
2017 2nd Internatonal Conference on Electrcal and Electroncs: echnques and Applcatons (EEA 2017) ISBN: 978-1-60595-416-5 Study on Actve Mcro-vbraton Isolaton System wth Lnear Motor Actuator Gong-yu PAN,
Physics 5153 Classical Mechanics. D Alembert s Principle and The Lagrangian-1
 P. Guterrez Physcs 5153 Classcal Mechancs D Alembert s Prncple and The Lagrangan 1 Introducton The prncple of vrtual work provdes a method of solvng problems of statc equlbrum wthout havng to consder the
P. Guterrez Physcs 5153 Classcal Mechancs D Alembert s Prncple and The Lagrangan 1 Introducton The prncple of vrtual work provdes a method of solvng problems of statc equlbrum wthout havng to consder the
Module 11 Design of Joints for Special Loading. Version 2 ME, IIT Kharagpur
 Module 11 Desgn o Jonts or Specal Loadng Verson ME, IIT Kharagpur Lesson 1 Desgn o Eccentrcally Loaded Bolted/Rveted Jonts Verson ME, IIT Kharagpur Instructonal Objectves: At the end o ths lesson, the
Module 11 Desgn o Jonts or Specal Loadng Verson ME, IIT Kharagpur Lesson 1 Desgn o Eccentrcally Loaded Bolted/Rveted Jonts Verson ME, IIT Kharagpur Instructonal Objectves: At the end o ths lesson, the
Spin-rotation coupling of the angularly accelerated rigid body
 Spn-rotaton couplng of the angularly accelerated rgd body Loua Hassan Elzen Basher Khartoum, Sudan. Postal code:11123 E-mal: louaelzen@gmal.com November 1, 2017 All Rghts Reserved. Abstract Ths paper s
Spn-rotaton couplng of the angularly accelerated rgd body Loua Hassan Elzen Basher Khartoum, Sudan. Postal code:11123 E-mal: louaelzen@gmal.com November 1, 2017 All Rghts Reserved. Abstract Ths paper s
Spring 2002 Lecture #13
 44-50 Sprng 00 ecture # Dr. Jaehoon Yu. Rotatonal Energy. Computaton of oments of nerta. Parallel-as Theorem 4. Torque & Angular Acceleraton 5. Work, Power, & Energy of Rotatonal otons Remember the md-term
44-50 Sprng 00 ecture # Dr. Jaehoon Yu. Rotatonal Energy. Computaton of oments of nerta. Parallel-as Theorem 4. Torque & Angular Acceleraton 5. Work, Power, & Energy of Rotatonal otons Remember the md-term
Moments of Inertia. and reminds us of the analogous equation for linear momentum p= mv, which is of the form. The kinetic energy of the body is.
 Moments of Inerta Suppose a body s movng on a crcular path wth constant speed Let s consder two quanttes: the body s angular momentum L about the center of the crcle, and ts knetc energy T How are these
Moments of Inerta Suppose a body s movng on a crcular path wth constant speed Let s consder two quanttes: the body s angular momentum L about the center of the crcle, and ts knetc energy T How are these
So far: simple (planar) geometries
 geometries") Physcs 06 ecture 5 Torque and Angular Momentum as Vectors SJ 7thEd.: Chap. to 3 Rotatonal quanttes as vectors Cross product Torque epressed as a vector Angular momentum defned Angular momentum as a vector
Physcs 06 ecture 5 Torque and Angular Momentum as Vectors SJ 7thEd.: Chap. to 3 Rotatonal quanttes as vectors Cross product Torque epressed as a vector Angular momentum defned Angular momentum as a vector
11. Dynamics in Rotating Frames of Reference
 Unversty of Rhode Island DgtalCommons@URI Classcal Dynamcs Physcs Course Materals 2015 11. Dynamcs n Rotatng Frames of Reference Gerhard Müller Unversty of Rhode Island, gmuller@ur.edu Creatve Commons
Unversty of Rhode Island DgtalCommons@URI Classcal Dynamcs Physcs Course Materals 2015 11. Dynamcs n Rotatng Frames of Reference Gerhard Müller Unversty of Rhode Island, gmuller@ur.edu Creatve Commons
A Multi-Axis Force Measurement System for a Space Docking Mechanism
 3rd Internatonal Conference on Materal, Mechancal and Manufacturng Engneerng (IC3ME 215) A Mult-Axs orce Measurement System for a Space Dockng Mechansm Gangfeng Lu a*, Changle L b and Zenghu Xe c Buldng
3rd Internatonal Conference on Materal, Mechancal and Manufacturng Engneerng (IC3ME 215) A Mult-Axs orce Measurement System for a Space Dockng Mechansm Gangfeng Lu a*, Changle L b and Zenghu Xe c Buldng
Chapter 11 Angular Momentum
 Chapter 11 Angular Momentum Analyss Model: Nonsolated System (Angular Momentum) Angular Momentum of a Rotatng Rgd Object Analyss Model: Isolated System (Angular Momentum) Angular Momentum of a Partcle
Chapter 11 Angular Momentum Analyss Model: Nonsolated System (Angular Momentum) Angular Momentum of a Rotatng Rgd Object Analyss Model: Isolated System (Angular Momentum) Angular Momentum of a Partcle
MEV442 Introduction to Robotics Module 2. Dr. Santhakumar Mohan Assistant Professor Mechanical Engineering National Institute of Technology Calicut
 MEV442 Introducton to Robotcs Module 2 Dr. Santhakumar Mohan Assstant Professor Mechancal Engneerng Natonal Insttute of Technology Calcut Jacobans: Veloctes and statc forces Introducton Notaton for tme-varyng
MEV442 Introducton to Robotcs Module 2 Dr. Santhakumar Mohan Assstant Professor Mechancal Engneerng Natonal Insttute of Technology Calcut Jacobans: Veloctes and statc forces Introducton Notaton for tme-varyng
PHYS 705: Classical Mechanics. Newtonian Mechanics
 1 PHYS 705: Classcal Mechancs Newtonan Mechancs Quck Revew of Newtonan Mechancs Basc Descrpton: -An dealzed pont partcle or a system of pont partcles n an nertal reference frame [Rgd bodes (ch. 5 later)]
1 PHYS 705: Classcal Mechancs Newtonan Mechancs Quck Revew of Newtonan Mechancs Basc Descrpton: -An dealzed pont partcle or a system of pont partcles n an nertal reference frame [Rgd bodes (ch. 5 later)]
SCHOOL OF COMPUTING, ENGINEERING AND MATHEMATICS SEMESTER 2 EXAMINATIONS 2011/2012 DYNAMICS ME247 DR. N.D.D. MICHÉ
 s SCHOOL OF COMPUTING, ENGINEERING ND MTHEMTICS SEMESTER EXMINTIONS 011/01 DYNMICS ME47 DR. N.D.D. MICHÉ Tme allowed: THREE hours nswer: ny FOUR from SIX questons Each queston carres 5 marks Ths s a CLOSED-BOOK
s SCHOOL OF COMPUTING, ENGINEERING ND MTHEMTICS SEMESTER EXMINTIONS 011/01 DYNMICS ME47 DR. N.D.D. MICHÉ Tme allowed: THREE hours nswer: ny FOUR from SIX questons Each queston carres 5 marks Ths s a CLOSED-BOOK
Chapter 11: Angular Momentum
 Chapter 11: ngular Momentum Statc Equlbrum In Chap. 4 we studed the equlbrum of pontobjects (mass m) wth the applcaton of Newton s aws F 0 F x y, 0 Therefore, no lnear (translatonal) acceleraton, a0 For
Chapter 11: ngular Momentum Statc Equlbrum In Chap. 4 we studed the equlbrum of pontobjects (mass m) wth the applcaton of Newton s aws F 0 F x y, 0 Therefore, no lnear (translatonal) acceleraton, a0 For
Important Dates: Post Test: Dec during recitations. If you have taken the post test, don t come to recitation!
 Important Dates: Post Test: Dec. 8 0 durng rectatons. If you have taken the post test, don t come to rectaton! Post Test Make-Up Sessons n ARC 03: Sat Dec. 6, 0 AM noon, and Sun Dec. 7, 8 PM 0 PM. Post
Important Dates: Post Test: Dec. 8 0 durng rectatons. If you have taken the post test, don t come to rectaton! Post Test Make-Up Sessons n ARC 03: Sat Dec. 6, 0 AM noon, and Sun Dec. 7, 8 PM 0 PM. Post
Chapter Eight. Review and Summary. Two methods in solid mechanics ---- vectorial methods and energy methods or variational methods
 Chapter Eght Energy Method 8. Introducton 8. Stran energy expressons 8.3 Prncpal of statonary potental energy; several degrees of freedom ------ Castglano s frst theorem ---- Examples 8.4 Prncpal of statonary
Chapter Eght Energy Method 8. Introducton 8. Stran energy expressons 8.3 Prncpal of statonary potental energy; several degrees of freedom ------ Castglano s frst theorem ---- Examples 8.4 Prncpal of statonary
Indeterminate pin-jointed frames (trusses)
") Indetermnate pn-jonted frames (trusses) Calculaton of member forces usng force method I. Statcal determnacy. The degree of freedom of any truss can be derved as: w= k d a =, where k s the number of all
Indetermnate pn-jonted frames (trusses) Calculaton of member forces usng force method I. Statcal determnacy. The degree of freedom of any truss can be derved as: w= k d a =, where k s the number of all
Physics 181. Particle Systems
 Physcs 181 Partcle Systems Overvew In these notes we dscuss the varables approprate to the descrpton of systems of partcles, ther defntons, ther relatons, and ther conservatons laws. We consder a system
Physcs 181 Partcle Systems Overvew In these notes we dscuss the varables approprate to the descrpton of systems of partcles, ther defntons, ther relatons, and ther conservatons laws. We consder a system
In this section is given an overview of the common elasticity models.
 Secton 4.1 4.1 Elastc Solds In ths secton s gven an overvew of the common elastcty models. 4.1.1 The Lnear Elastc Sold The classcal Lnear Elastc model, or Hooean model, has the followng lnear relatonshp
Secton 4.1 4.1 Elastc Solds In ths secton s gven an overvew of the common elastcty models. 4.1.1 The Lnear Elastc Sold The classcal Lnear Elastc model, or Hooean model, has the followng lnear relatonshp
PHYS 705: Classical Mechanics. Calculus of Variations II
 1 PHYS 705: Classcal Mechancs Calculus of Varatons II 2 Calculus of Varatons: Generalzaton (no constrant yet) Suppose now that F depends on several dependent varables : We need to fnd such that has a statonary
1 PHYS 705: Classcal Mechancs Calculus of Varatons II 2 Calculus of Varatons: Generalzaton (no constrant yet) Suppose now that F depends on several dependent varables : We need to fnd such that has a statonary
Angular Momentum and Fixed Axis Rotation. 8.01t Nov 10, 2004
 Angular Momentum and Fxed Axs Rotaton 8.01t Nov 10, 2004 Dynamcs: Translatonal and Rotatonal Moton Translatonal Dynamcs Total Force Torque Angular Momentum about Dynamcs of Rotaton F ext Momentum of a
Angular Momentum and Fxed Axs Rotaton 8.01t Nov 10, 2004 Dynamcs: Translatonal and Rotatonal Moton Translatonal Dynamcs Total Force Torque Angular Momentum about Dynamcs of Rotaton F ext Momentum of a
Lecture 8 Modal Analysis
 Lecture 8 Modal Analyss 16.0 Release Introducton to ANSYS Mechancal 1 2015 ANSYS, Inc. February 27, 2015 Chapter Overvew In ths chapter free vbraton as well as pre-stressed vbraton analyses n Mechancal
Lecture 8 Modal Analyss 16.0 Release Introducton to ANSYS Mechancal 1 2015 ANSYS, Inc. February 27, 2015 Chapter Overvew In ths chapter free vbraton as well as pre-stressed vbraton analyses n Mechancal
An Algorithm to Solve the Inverse Kinematics Problem of a Robotic Manipulator Based on Rotation Vectors
 An Algorthm to Solve the Inverse Knematcs Problem of a Robotc Manpulator Based on Rotaton Vectors Mohamad Z. Al-az*, Mazn Z. Othman**, and Baker B. Al-Bahr* *AL-Nahran Unversty, Computer Eng. Dep., Baghdad,
An Algorthm to Solve the Inverse Knematcs Problem of a Robotc Manpulator Based on Rotaton Vectors Mohamad Z. Al-az*, Mazn Z. Othman**, and Baker B. Al-Bahr* *AL-Nahran Unversty, Computer Eng. Dep., Baghdad,
PHYSICS 231 Review problems for midterm 2
 PHYSICS 31 Revew problems for mdterm Topc 5: Energy and Work and Power Topc 6: Momentum and Collsons Topc 7: Oscllatons (sprng and pendulum) Topc 8: Rotatonal Moton The nd exam wll be Wednesday October
PHYSICS 31 Revew problems for mdterm Topc 5: Energy and Work and Power Topc 6: Momentum and Collsons Topc 7: Oscllatons (sprng and pendulum) Topc 8: Rotatonal Moton The nd exam wll be Wednesday October
CHAPTER 10 ROTATIONAL MOTION
 CHAPTER 0 ROTATONAL MOTON 0. ANGULAR VELOCTY Consder argd body rotates about a fxed axs through pont O n x-y plane as shown. Any partcle at pont P n ths rgd body rotates n a crcle of radus r about O. The
CHAPTER 0 ROTATONAL MOTON 0. ANGULAR VELOCTY Consder argd body rotates about a fxed axs through pont O n x-y plane as shown. Any partcle at pont P n ths rgd body rotates n a crcle of radus r about O. The
Week 11: Chapter 11. The Vector Product. The Vector Product Defined. The Vector Product and Torque. More About the Vector Product
 The Vector Product Week 11: Chapter 11 Angular Momentum There are nstances where the product of two vectors s another vector Earler we saw where the product of two vectors was a scalar Ths was called the
The Vector Product Week 11: Chapter 11 Angular Momentum There are nstances where the product of two vectors s another vector Earler we saw where the product of two vectors was a scalar Ths was called the
The classical spin-rotation coupling
 LOUAI H. ELZEIN 2018 All Rghts Reserved The classcal spn-rotaton couplng Loua Hassan Elzen Basher Khartoum, Sudan. Postal code:11123 louaelzen@gmal.com Abstract Ths paper s prepared to show that a rgd
LOUAI H. ELZEIN 2018 All Rghts Reserved The classcal spn-rotaton couplng Loua Hassan Elzen Basher Khartoum, Sudan. Postal code:11123 louaelzen@gmal.com Abstract Ths paper s prepared to show that a rgd
Classical Mechanics Virtual Work & d Alembert s Principle
 Classcal Mechancs Vrtual Work & d Alembert s Prncple Dpan Kumar Ghosh UM-DAE Centre for Excellence n Basc Scences Kalna, Mumba 400098 August 15, 2016 1 Constrants Moton of a system of partcles s often
Classcal Mechancs Vrtual Work & d Alembert s Prncple Dpan Kumar Ghosh UM-DAE Centre for Excellence n Basc Scences Kalna, Mumba 400098 August 15, 2016 1 Constrants Moton of a system of partcles s often
ENGN 40 Dynamics and Vibrations Homework # 7 Due: Friday, April 15
 NGN 40 ynamcs and Vbratons Homework # 7 ue: Frday, Aprl 15 1. Consder a concal hostng drum used n the mnng ndustry to host a mass up/down. A cable of dameter d has the mass connected at one end and s wound/unwound
NGN 40 ynamcs and Vbratons Homework # 7 ue: Frday, Aprl 15 1. Consder a concal hostng drum used n the mnng ndustry to host a mass up/down. A cable of dameter d has the mass connected at one end and s wound/unwound
10/23/2003 PHY Lecture 14R 1
 Announcements. Remember -- Tuesday, Oct. 8 th, 9:30 AM Second exam (coverng Chapters 9-4 of HRW) Brng the followng: a) equaton sheet b) Calculator c) Pencl d) Clear head e) Note: If you have kept up wth
Announcements. Remember -- Tuesday, Oct. 8 th, 9:30 AM Second exam (coverng Chapters 9-4 of HRW) Brng the followng: a) equaton sheet b) Calculator c) Pencl d) Clear head e) Note: If you have kept up wth
SCALARS AND VECTORS All physical quantities in engineering mechanics are measured using either scalars or vectors.
 SCALARS AND ECTORS All phscal uanttes n engneerng mechancs are measured usng ether scalars or vectors. Scalar. A scalar s an postve or negatve phscal uantt that can be completel specfed b ts magntude.
SCALARS AND ECTORS All phscal uanttes n engneerng mechancs are measured usng ether scalars or vectors. Scalar. A scalar s an postve or negatve phscal uantt that can be completel specfed b ts magntude.
Four Bar Linkages in Two Dimensions. A link has fixed length and is joined to other links and also possibly to a fixed point.
 Four bar lnkages 1 Four Bar Lnkages n Two Dmensons lnk has fed length and s oned to other lnks and also possbly to a fed pont. The relatve velocty of end B wth regard to s gven by V B = ω r y v B B = +y
Four bar lnkages 1 Four Bar Lnkages n Two Dmensons lnk has fed length and s oned to other lnks and also possbly to a fed pont. The relatve velocty of end B wth regard to s gven by V B = ω r y v B B = +y
Integrals and Invariants of Euler-Lagrange Equations
 Lecture 16 Integrals and Invarants of Euler-Lagrange Equatons ME 256 at the Indan Insttute of Scence, Bengaluru Varatonal Methods and Structural Optmzaton G. K. Ananthasuresh Professor, Mechancal Engneerng,
Lecture 16 Integrals and Invarants of Euler-Lagrange Equatons ME 256 at the Indan Insttute of Scence, Bengaluru Varatonal Methods and Structural Optmzaton G. K. Ananthasuresh Professor, Mechancal Engneerng,
ENGI9496 Lecture Notes Multiport Models in Mechanics
 ENGI9496 Moellng an Smulaton of Dynamc Systems Mechancs an Mechansms ENGI9496 Lecture Notes Multport Moels n Mechancs (New text Secton 4..3; Secton 9.1 generalzes to 3D moton) Defntons Generalze coornates
ENGI9496 Moellng an Smulaton of Dynamc Systems Mechancs an Mechansms ENGI9496 Lecture Notes Multport Moels n Mechancs (New text Secton 4..3; Secton 9.1 generalzes to 3D moton) Defntons Generalze coornates
Inner Product. Euclidean Space. Orthonormal Basis. Orthogonal
 Inner Product Defnton 1 () A Eucldean space s a fnte-dmensonal vector space over the reals R, wth an nner product,. Defnton 2 (Inner Product) An nner product, on a real vector space X s a symmetrc, blnear,
Inner Product Defnton 1 () A Eucldean space s a fnte-dmensonal vector space over the reals R, wth an nner product,. Defnton 2 (Inner Product) An nner product, on a real vector space X s a symmetrc, blnear,
PY2101 Classical Mechanics Dr. Síle Nic Chormaic, Room 215 D Kane Bldg
 PY2101 Classcal Mechancs Dr. Síle Nc Chormac, Room 215 D Kane Bldg s.ncchormac@ucc.e Lectures stll some ssues to resolve. Slots shared between PY2101 and PY2104. Hope to have t fnalsed by tomorrow. Mondays
PY2101 Classcal Mechancs Dr. Síle Nc Chormac, Room 215 D Kane Bldg s.ncchormac@ucc.e Lectures stll some ssues to resolve. Slots shared between PY2101 and PY2104. Hope to have t fnalsed by tomorrow. Mondays
Homework 2: Kinematics and Dynamics of Particles Due Friday Feb 7, 2014 Max Score 45 Points + 8 Extra Credit
 EN40: Dynamcs and Vbratons School of Engneerng Brown Unversty Homework : Knematcs and Dynamcs of Partcles Due Frday Feb 7, 014 Max Score 45 Ponts + 8 Extra Credt 1. An expermental mcro-robot (see a descrpton
EN40: Dynamcs and Vbratons School of Engneerng Brown Unversty Homework : Knematcs and Dynamcs of Partcles Due Frday Feb 7, 014 Max Score 45 Ponts + 8 Extra Credt 1. An expermental mcro-robot (see a descrpton
Chapter 9. The Dot Product (Scalar Product) The Dot Product use (Scalar Product) The Dot Product (Scalar Product) The Cross Product.
 The Dot Product use (Scalar Product) The Dot Product (Scalar Product) The Cross Product.") The Dot Product (Scalar Product) Chapter 9 Statcs and Torque The dot product of two vectors can be constructed by takng the component of one vector n the drecton of the other and multplyng t tmes the magntude
The Dot Product (Scalar Product) Chapter 9 Statcs and Torque The dot product of two vectors can be constructed by takng the component of one vector n the drecton of the other and multplyng t tmes the magntude
Rotational and Translational Comparison. Conservation of Angular Momentum. Angular Momentum for a System of Particles
 Conservaton o Angular Momentum 8.0 WD Rotatonal and Translatonal Comparson Quantty Momentum Ang Momentum Force Torque Knetc Energy Work Power Rotaton L cm = I cm ω = dl / cm cm K = (/ ) rot P rot θ W =
Conservaton o Angular Momentum 8.0 WD Rotatonal and Translatonal Comparson Quantty Momentum Ang Momentum Force Torque Knetc Energy Work Power Rotaton L cm = I cm ω = dl / cm cm K = (/ ) rot P rot θ W =
THE EFFECT OF TORSIONAL RIGIDITY BETWEEN ELEMENTS ON FREE VIBRATIONS OF A TELESCOPIC HYDRAULIC CYLINDER SUBJECTED TO EULER S LOAD
 Journal of Appled Mathematcs and Computatonal Mechancs 7, 6(3), 7- www.amcm.pcz.pl p-issn 99-9965 DOI:.75/jamcm.7.3. e-issn 353-588 THE EFFECT OF TORSIONAL RIGIDITY BETWEEN ELEMENTS ON FREE VIBRATIONS
Journal of Appled Mathematcs and Computatonal Mechancs 7, 6(3), 7- www.amcm.pcz.pl p-issn 99-9965 DOI:.75/jamcm.7.3. e-issn 353-588 THE EFFECT OF TORSIONAL RIGIDITY BETWEEN ELEMENTS ON FREE VIBRATIONS
Chapter 7: Application Issues
 Chapter 7: Applcaton Issues hs chapter wll brefly summarze several of the ssues that arse n mplementaton of the Carpal Wrst. he specfc ssues nvolved n puttng ths wrst nto producton are both task and manpulator
Chapter 7: Applcaton Issues hs chapter wll brefly summarze several of the ssues that arse n mplementaton of the Carpal Wrst. he specfc ssues nvolved n puttng ths wrst nto producton are both task and manpulator
AP Physics 1 & 2 Summer Assignment
 AP Physcs 1 & 2 Summer Assgnment AP Physcs 1 requres an exceptonal profcency n algebra, trgonometry, and geometry. It was desgned by a select group of college professors and hgh school scence teachers
AP Physcs 1 & 2 Summer Assgnment AP Physcs 1 requres an exceptonal profcency n algebra, trgonometry, and geometry. It was desgned by a select group of college professors and hgh school scence teachers
EMU Physics Department
 Physcs 0 Lecture 8 Potental Energy and Conservaton Assst. Pro. Dr. Al ÖVGÜN EMU Physcs Department www.aovgun.com Denton o Work W q The work, W, done by a constant orce on an object s dened as the product
Physcs 0 Lecture 8 Potental Energy and Conservaton Assst. Pro. Dr. Al ÖVGÜN EMU Physcs Department www.aovgun.com Denton o Work W q The work, W, done by a constant orce on an object s dened as the product
CHAPTER 5 NUMERICAL EVALUATION OF DYNAMIC RESPONSE
 CHAPTER 5 NUMERICAL EVALUATION OF DYNAMIC RESPONSE Analytcal soluton s usually not possble when exctaton vares arbtrarly wth tme or f the system s nonlnear. Such problems can be solved by numercal tmesteppng
CHAPTER 5 NUMERICAL EVALUATION OF DYNAMIC RESPONSE Analytcal soluton s usually not possble when exctaton vares arbtrarly wth tme or f the system s nonlnear. Such problems can be solved by numercal tmesteppng
Physics 207: Lecture 20. Today s Agenda Homework for Monday
 Physcs 207: Lecture 20 Today s Agenda Homework for Monday Recap: Systems of Partcles Center of mass Velocty and acceleraton of the center of mass Dynamcs of the center of mass Lnear Momentum Example problems
Physcs 207: Lecture 20 Today s Agenda Homework for Monday Recap: Systems of Partcles Center of mass Velocty and acceleraton of the center of mass Dynamcs of the center of mass Lnear Momentum Example problems
Design and Optimization of Fuzzy Controller for Inverse Pendulum System Using Genetic Algorithm
 Desgn and Optmzaton of Fuzzy Controller for Inverse Pendulum System Usng Genetc Algorthm H. Mehraban A. Ashoor Unversty of Tehran Unversty of Tehran h.mehraban@ece.ut.ac.r a.ashoor@ece.ut.ac.r Abstract:
Desgn and Optmzaton of Fuzzy Controller for Inverse Pendulum System Usng Genetc Algorthm H. Mehraban A. Ashoor Unversty of Tehran Unversty of Tehran h.mehraban@ece.ut.ac.r a.ashoor@ece.ut.ac.r Abstract:
Chapter 3 and Chapter 4
 Chapter 3 and Chapter 4 Chapter 3 Energy 3. Introducton:Work Work W s energy transerred to or rom an object by means o a orce actng on the object. Energy transerred to the object s postve work, and energy
Chapter 3 and Chapter 4 Chapter 3 Energy 3. Introducton:Work Work W s energy transerred to or rom an object by means o a orce actng on the object. Energy transerred to the object s postve work, and energy
χ x B E (c) Figure 2.1.1: (a) a material particle in a body, (b) a place in space, (c) a configuration of the body
 Figure 2.1.1: (a) a material particle in a body, (b) a place in space, (c) a configuration of the body") Secton.. Moton.. The Materal Body and Moton hyscal materals n the real world are modeled usng an abstract mathematcal entty called a body. Ths body conssts of an nfnte number of materal partcles. Shown
Secton.. Moton.. The Materal Body and Moton hyscal materals n the real world are modeled usng an abstract mathematcal entty called a body. Ths body conssts of an nfnte number of materal partcles. Shown
Recitation: Energy, Phys Energies. 1.2 Three stones. 1. Energy. 1. An acorn falling from an oak tree onto the sidewalk.
 Rectaton: Energy, Phys 207. Energy. Energes. An acorn fallng from an oak tree onto the sdewalk. The acorn ntal has gravtatonal potental energy. As t falls, t converts ths energy to knetc. When t hts the
Rectaton: Energy, Phys 207. Energy. Energes. An acorn fallng from an oak tree onto the sdewalk. The acorn ntal has gravtatonal potental energy. As t falls, t converts ths energy to knetc. When t hts the
APPENDIX F A DISPLACEMENT-BASED BEAM ELEMENT WITH SHEAR DEFORMATIONS. Never use a Cubic Function Approximation for a Non-Prismatic Beam
 APPENDIX F A DISPACEMENT-BASED BEAM EEMENT WITH SHEAR DEFORMATIONS Never use a Cubc Functon Approxmaton for a Non-Prsmatc Beam F. INTRODUCTION { XE "Shearng Deformatons" }In ths appendx a unque development
APPENDIX F A DISPACEMENT-BASED BEAM EEMENT WITH SHEAR DEFORMATIONS Never use a Cubc Functon Approxmaton for a Non-Prsmatc Beam F. INTRODUCTION { XE "Shearng Deformatons" }In ths appendx a unque development
Physics 141. Lecture 14. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 14, Page 1
 Physcs 141. Lecture 14. Frank L. H. Wolfs Department of Physcs and Astronomy, Unversty of Rochester, Lecture 14, Page 1 Physcs 141. Lecture 14. Course Informaton: Lab report # 3. Exam # 2. Mult-Partcle
Physcs 141. Lecture 14. Frank L. H. Wolfs Department of Physcs and Astronomy, Unversty of Rochester, Lecture 14, Page 1 Physcs 141. Lecture 14. Course Informaton: Lab report # 3. Exam # 2. Mult-Partcle
Notes on Analytical Dynamics
 Notes on Analytcal Dynamcs Jan Peters & Mchael Mstry October 7, 004 Newtonan Mechancs Basc Asssumptons and Newtons Laws Lonely pontmasses wth postve mass Newtons st: Constant velocty v n an nertal frame
Notes on Analytcal Dynamcs Jan Peters & Mchael Mstry October 7, 004 Newtonan Mechancs Basc Asssumptons and Newtons Laws Lonely pontmasses wth postve mass Newtons st: Constant velocty v n an nertal frame
Mathematical Preparations
 1 Introducton Mathematcal Preparatons The theory of relatvty was developed to explan experments whch studed the propagaton of electromagnetc radaton n movng coordnate systems. Wthn expermental error the
1 Introducton Mathematcal Preparatons The theory of relatvty was developed to explan experments whch studed the propagaton of electromagnetc radaton n movng coordnate systems. Wthn expermental error the
Please review the following statement: I certify that I have not given unauthorized aid nor have I received aid in the completion of this exam.
 ME 270 Summer 2014 Fnal Exam NAME (Last, Frst): Please revew the followng statement: I certfy that I have not gven unauthorzed ad nor have I receved ad n the completon of ths exam. Sgnature: INSTRUCTIONS
ME 270 Summer 2014 Fnal Exam NAME (Last, Frst): Please revew the followng statement: I certfy that I have not gven unauthorzed ad nor have I receved ad n the completon of ths exam. Sgnature: INSTRUCTIONS
Please initial the statement below to show that you have read it
 EN40: Dynamcs and Vbratons Mdterm Examnaton Thursday March 5 009 Dvson of Engneerng rown Unversty NME: Isaac Newton General Instructons No collaboraton of any knd s permtted on ths examnaton. You may brng
EN40: Dynamcs and Vbratons Mdterm Examnaton Thursday March 5 009 Dvson of Engneerng rown Unversty NME: Isaac Newton General Instructons No collaboraton of any knd s permtted on ths examnaton. You may brng
Physics 207 Lecture 13. Lecture 13
 Physcs 07 Lecture 3 Goals: Lecture 3 Chapter 0 Understand the relatonshp between moton and energy Defne Potental Energy n a Hooke s Law sprng Develop and explot conservaton of energy prncple n problem
Physcs 07 Lecture 3 Goals: Lecture 3 Chapter 0 Understand the relatonshp between moton and energy Defne Potental Energy n a Hooke s Law sprng Develop and explot conservaton of energy prncple n problem
12. The Hamilton-Jacobi Equation Michael Fowler
 1. The Hamlton-Jacob Equaton Mchael Fowler Back to Confguraton Space We ve establshed that the acton, regarded as a functon of ts coordnate endponts and tme, satsfes ( ) ( ) S q, t / t+ H qpt,, = 0, and
1. The Hamlton-Jacob Equaton Mchael Fowler Back to Confguraton Space We ve establshed that the acton, regarded as a functon of ts coordnate endponts and tme, satsfes ( ) ( ) S q, t / t+ H qpt,, = 0, and
Trajectory Optimization of Flexible Mobile Manipulators Using Open-Loop Optimal Control method
 rajectory Optmzaton o Flexble Moble Manpulators Usng Open-Loop Optmal Control method M.H. Korayem and H. Rahm Nohooj Robotc Lab, Mechancal Department, Iran Unversty o Scence and echnology hkorayem@ust.ac.r,
rajectory Optmzaton o Flexble Moble Manpulators Usng Open-Loop Optmal Control method M.H. Korayem and H. Rahm Nohooj Robotc Lab, Mechancal Department, Iran Unversty o Scence and echnology hkorayem@ust.ac.r,
EN40: Dynamics and Vibrations. Homework 4: Work, Energy and Linear Momentum Due Friday March 1 st
 EN40: Dynamcs and bratons Homework 4: Work, Energy and Lnear Momentum Due Frday March 1 st School of Engneerng Brown Unversty 1. The fgure (from ths publcaton) shows the energy per unt area requred to
EN40: Dynamcs and bratons Homework 4: Work, Energy and Lnear Momentum Due Frday March 1 st School of Engneerng Brown Unversty 1. The fgure (from ths publcaton) shows the energy per unt area requred to
Module 3 LOSSY IMAGE COMPRESSION SYSTEMS. Version 2 ECE IIT, Kharagpur
 Module 3 LOSSY IMAGE COMPRESSION SYSTEMS Verson ECE IIT, Kharagpur Lesson 6 Theory of Quantzaton Verson ECE IIT, Kharagpur Instructonal Objectves At the end of ths lesson, the students should be able to:
Module 3 LOSSY IMAGE COMPRESSION SYSTEMS Verson ECE IIT, Kharagpur Lesson 6 Theory of Quantzaton Verson ECE IIT, Kharagpur Instructonal Objectves At the end of ths lesson, the students should be able to:
Optimum Design of Steel Frames Considering Uncertainty of Parameters
 9 th World Congress on Structural and Multdscplnary Optmzaton June 13-17, 211, Shzuoka, Japan Optmum Desgn of Steel Frames Consderng ncertanty of Parameters Masahko Katsura 1, Makoto Ohsak 2 1 Hroshma
9 th World Congress on Structural and Multdscplnary Optmzaton June 13-17, 211, Shzuoka, Japan Optmum Desgn of Steel Frames Consderng ncertanty of Parameters Masahko Katsura 1, Makoto Ohsak 2 1 Hroshma
The Analysis of Coriolis Effect on a Robot Manipulator
 Internatonal Journal of Innovatons n Engneerng and echnology (IJIE) he Analyss of Corols Effect on a Robot Manpulator Pratap P homas Assstant Professor Department of Mechancal Engneerng K G Reddy college
Internatonal Journal of Innovatons n Engneerng and echnology (IJIE) he Analyss of Corols Effect on a Robot Manpulator Pratap P homas Assstant Professor Department of Mechancal Engneerng K G Reddy college
Second Order Analysis
 Second Order Analyss In the prevous classes we looked at a method that determnes the load correspondng to a state of bfurcaton equlbrum of a perfect frame by egenvalye analyss The system was assumed to
Second Order Analyss In the prevous classes we looked at a method that determnes the load correspondng to a state of bfurcaton equlbrum of a perfect frame by egenvalye analyss The system was assumed to
NMT EE 589 & UNM ME 482/582 ROBOT ENGINEERING. Dr. Stephen Bruder NMT EE 589 & UNM ME 482/582
 NMT EE 589 & UNM ME 48/58 ROBOT ENGINEERING Dr. Stephen Bruder NMT EE 589 & UNM ME 48/58 7. Robot Dynamcs 7.5 The Equatons of Moton Gven that we wsh to fnd the path q(t (n jont space) whch mnmzes the energy
NMT EE 589 & UNM ME 48/58 ROBOT ENGINEERING Dr. Stephen Bruder NMT EE 589 & UNM ME 48/58 7. Robot Dynamcs 7.5 The Equatons of Moton Gven that we wsh to fnd the path q(t (n jont space) whch mnmzes the energy
Adjoint Methods of Sensitivity Analysis for Lyapunov Equation. Boping Wang 1, Kun Yan 2. University of Technology, Dalian , P. R.
 th World Congress on Structural and Multdscplnary Optmsaton 7 th - th, June 5, Sydney Australa Adjont Methods of Senstvty Analyss for Lyapunov Equaton Bopng Wang, Kun Yan Department of Mechancal and Aerospace
th World Congress on Structural and Multdscplnary Optmsaton 7 th - th, June 5, Sydney Australa Adjont Methods of Senstvty Analyss for Lyapunov Equaton Bopng Wang, Kun Yan Department of Mechancal and Aerospace
MEASUREMENT OF MOMENT OF INERTIA
 1. measurement MESUREMENT OF MOMENT OF INERTI The am of ths measurement s to determne the moment of nerta of the rotor of an electrc motor. 1. General relatons Rotatng moton and moment of nerta Let us
1. measurement MESUREMENT OF MOMENT OF INERTI The am of ths measurement s to determne the moment of nerta of the rotor of an electrc motor. 1. General relatons Rotatng moton and moment of nerta Let us
COMPOSITE BEAM WITH WEAK SHEAR CONNECTION SUBJECTED TO THERMAL LOAD
 COMPOSITE BEAM WITH WEAK SHEAR CONNECTION SUBJECTED TO THERMAL LOAD Ákos Jósef Lengyel, István Ecsed Assstant Lecturer, Professor of Mechancs, Insttute of Appled Mechancs, Unversty of Mskolc, Mskolc-Egyetemváros,
COMPOSITE BEAM WITH WEAK SHEAR CONNECTION SUBJECTED TO THERMAL LOAD Ákos Jósef Lengyel, István Ecsed Assstant Lecturer, Professor of Mechancs, Insttute of Appled Mechancs, Unversty of Mskolc, Mskolc-Egyetemváros,
Conservation of Energy
 Lecture 3 Chapter 8 Physcs I 0.3.03 Conservaton o Energy Course webste: http://aculty.uml.edu/andry_danylov/teachng/physcsi Lecture Capture: http://echo360.uml.edu/danylov03/physcsall.html 95.4, Fall 03,
Lecture 3 Chapter 8 Physcs I 0.3.03 Conservaton o Energy Course webste: http://aculty.uml.edu/andry_danylov/teachng/physcsi Lecture Capture: http://echo360.uml.edu/danylov03/physcsall.html 95.4, Fall 03,
RESEARCH REGARDING FRICTION INFLUENCE OF WIRES TO JOINTS INTERIOR ON PRECISION POSITIONING OF A ROBOTIC ARM
 Internatonal Journal of Modern Manufacturng Technologes ISSN 2067 3604, Vol. VIII, No. 1 / 2016 RESEARCH REGARDING FRICTION INFLUENCE OF WIRES TO JOINTS INTERIOR ON PRECISION POSITIONING OF A ROBOTIC ARM
Internatonal Journal of Modern Manufacturng Technologes ISSN 2067 3604, Vol. VIII, No. 1 / 2016 RESEARCH REGARDING FRICTION INFLUENCE OF WIRES TO JOINTS INTERIOR ON PRECISION POSITIONING OF A ROBOTIC ARM
Neuro-Adaptive Design II:
 Lecture 37 Neuro-Adaptve Desgn II: A Robustfyng Tool for Any Desgn Dr. Radhakant Padh Asst. Professor Dept. of Aerospace Engneerng Indan Insttute of Scence - Bangalore Motvaton Perfect system modelng s
Lecture 37 Neuro-Adaptve Desgn II: A Robustfyng Tool for Any Desgn Dr. Radhakant Padh Asst. Professor Dept. of Aerospace Engneerng Indan Insttute of Scence - Bangalore Motvaton Perfect system modelng s
Chapter 20 Rigid Body: Translation and Rotational Motion Kinematics for Fixed Axis Rotation
 Chapter 20 Rgd Body: Translaton and Rotatonal Moton Knematcs for Fxed Axs Rotaton 20.1 Introducton... 1 20.2 Constraned Moton: Translaton and Rotaton... 1 20.2.1 Rollng wthout slppng... 5 Example 20.1
Chapter 20 Rgd Body: Translaton and Rotatonal Moton Knematcs for Fxed Axs Rotaton 20.1 Introducton... 1 20.2 Constraned Moton: Translaton and Rotaton... 1 20.2.1 Rollng wthout slppng... 5 Example 20.1
VIBRATION FATIGUE DESIGN METHODOLOGY OF A LARGE SCALE HEAVY DUTY ROBOT
 ICSV14 Carns Australa 9-12 July, 2007 VIBRATION FATIGUE DESIGN METHODOLOGY OF A LARGE SCALE HEAVY DUTY ROBOT Jong Hw Seo 1, Jae Chul Hwang 1, Yong Won Cho 1, Dong Il Km 1, Hong Jae Ym 2 1 Robotcs Technology
ICSV14 Carns Australa 9-12 July, 2007 VIBRATION FATIGUE DESIGN METHODOLOGY OF A LARGE SCALE HEAVY DUTY ROBOT Jong Hw Seo 1, Jae Chul Hwang 1, Yong Won Cho 1, Dong Il Km 1, Hong Jae Ym 2 1 Robotcs Technology
Physics 207: Lecture 27. Announcements
 Physcs 07: ecture 7 Announcements ake-up labs are ths week Fnal hwk assgned ths week, fnal quz next week Revew sesson on Thursday ay 9, :30 4:00pm, Here Today s Agenda Statcs recap Beam & Strngs» What
Physcs 07: ecture 7 Announcements ake-up labs are ths week Fnal hwk assgned ths week, fnal quz next week Revew sesson on Thursday ay 9, :30 4:00pm, Here Today s Agenda Statcs recap Beam & Strngs» What
Chapter 10 Rotational motion
 Prof. Dr. I. Nasser Chapter0_I November 6, 07 Important Terms Chapter 0 Rotatonal moton Angular Dsplacement s, r n radans where s s the length of arc and r s the radus. Angular Velocty The rate at whch
Prof. Dr. I. Nasser Chapter0_I November 6, 07 Important Terms Chapter 0 Rotatonal moton Angular Dsplacement s, r n radans where s s the length of arc and r s the radus. Angular Velocty The rate at whch
Rigid body simulation
 Rgd bod smulaton Rgd bod smulaton Once we consder an object wth spacal etent, partcle sstem smulaton s no longer suffcent Problems Problems Unconstraned sstem rotatonal moton torques and angular momentum
Rgd bod smulaton Rgd bod smulaton Once we consder an object wth spacal etent, partcle sstem smulaton s no longer suffcent Problems Problems Unconstraned sstem rotatonal moton torques and angular momentum
10/24/2013. PHY 113 C General Physics I 11 AM 12:15 PM TR Olin 101. Plan for Lecture 17: Review of Chapters 9-13, 15-16
 0/4/03 PHY 3 C General Physcs I AM :5 PM T Oln 0 Plan or Lecture 7: evew o Chapters 9-3, 5-6. Comment on exam and advce or preparaton. evew 3. Example problems 0/4/03 PHY 3 C Fall 03 -- Lecture 7 0/4/03
0/4/03 PHY 3 C General Physcs I AM :5 PM T Oln 0 Plan or Lecture 7: evew o Chapters 9-3, 5-6. Comment on exam and advce or preparaton. evew 3. Example problems 0/4/03 PHY 3 C Fall 03 -- Lecture 7 0/4/03
Physics 106 Lecture 6 Conservation of Angular Momentum SJ 7 th Ed.: Chap 11.4
 Physcs 6 ecture 6 Conservaton o Angular Momentum SJ 7 th Ed.: Chap.4 Comparson: dentons o sngle partcle torque and angular momentum Angular momentum o a system o partcles o a rgd body rotatng about a xed
Physcs 6 ecture 6 Conservaton o Angular Momentum SJ 7 th Ed.: Chap.4 Comparson: dentons o sngle partcle torque and angular momentum Angular momentum o a system o partcles o a rgd body rotatng about a xed
Which Separator? Spring 1
 Whch Separator? 6.034 - Sprng 1 Whch Separator? Mamze the margn to closest ponts 6.034 - Sprng Whch Separator? Mamze the margn to closest ponts 6.034 - Sprng 3 Margn of a pont " # y (w $ + b) proportonal
Whch Separator? 6.034 - Sprng 1 Whch Separator? Mamze the margn to closest ponts 6.034 - Sprng Whch Separator? Mamze the margn to closest ponts 6.034 - Sprng 3 Margn of a pont " # y (w $ + b) proportonal
Balance Control in Interactive Motion
 Balance Control n Interactve Moton by Yuanfeng Zhu Drected By Professor Mchael Neff & Professor Bernd Hamann What s Interactve Moton? Fghtng Game Acton Game A knd of acton occurs as two or more objects
Balance Control n Interactve Moton by Yuanfeng Zhu Drected By Professor Mchael Neff & Professor Bernd Hamann What s Interactve Moton? Fghtng Game Acton Game A knd of acton occurs as two or more objects
Conservation of Angular Momentum = "Spin"
 Page 1 of 6 Conservaton of Angular Momentum = "Spn" We can assgn a drecton to the angular velocty: drecton of = drecton of axs + rght hand rule (wth rght hand, curl fngers n drecton of rotaton, thumb ponts
Page 1 of 6 Conservaton of Angular Momentum = "Spn" We can assgn a drecton to the angular velocty: drecton of = drecton of axs + rght hand rule (wth rght hand, curl fngers n drecton of rotaton, thumb ponts
Pivot-Wheel Drive Crab with a Twist! Clem McKown Team November-2009 (eq 1 edited 29-March-2010)
") Pvot-Wheel Drve Crab wth a Twst! Clem McKown Team 1640 13-November-2009 (eq 1 edted 29-March-2010) 4-Wheel Independent Pvot-Wheel Drve descrbes a 4wd drve-tran n whch each of the (4) wheels are ndependently
Pvot-Wheel Drve Crab wth a Twst! Clem McKown Team 1640 13-November-2009 (eq 1 edted 29-March-2010) 4-Wheel Independent Pvot-Wheel Drve descrbes a 4wd drve-tran n whch each of the (4) wheels are ndependently
The Finite Element Method
 The Fnte Element Method GENERAL INTRODUCTION Read: Chapters 1 and 2 CONTENTS Engneerng and analyss Smulaton of a physcal process Examples mathematcal model development Approxmate solutons and methods of
The Fnte Element Method GENERAL INTRODUCTION Read: Chapters 1 and 2 CONTENTS Engneerng and analyss Smulaton of a physcal process Examples mathematcal model development Approxmate solutons and methods of
Linear Approximation with Regularization and Moving Least Squares
 Lnear Approxmaton wth Regularzaton and Movng Least Squares Igor Grešovn May 007 Revson 4.6 (Revson : March 004). 5 4 3 0.5 3 3.5 4 Contents: Lnear Fttng...4. Weghted Least Squares n Functon Approxmaton...
Lnear Approxmaton wth Regularzaton and Movng Least Squares Igor Grešovn May 007 Revson 4.6 (Revson : March 004). 5 4 3 0.5 3 3.5 4 Contents: Lnear Fttng...4. Weghted Least Squares n Functon Approxmaton...
Kinematics of Fluids. Lecture 16. (Refer the text book CONTINUUM MECHANICS by GEORGE E. MASE, Schaum s Outlines) 17/02/2017
 17/02/2017") 17/0/017 Lecture 16 (Refer the text boo CONTINUUM MECHANICS by GEORGE E. MASE, Schaum s Outlnes) Knematcs of Fluds Last class, we started dscussng about the nematcs of fluds. Recall the Lagrangan and Euleran
17/0/017 Lecture 16 (Refer the text boo CONTINUUM MECHANICS by GEORGE E. MASE, Schaum s Outlnes) Knematcs of Fluds Last class, we started dscussng about the nematcs of fluds. Recall the Lagrangan and Euleran
U.C. Berkeley CS294: Beyond Worst-Case Analysis Luca Trevisan September 5, 2017
 U.C. Berkeley CS94: Beyond Worst-Case Analyss Handout 4s Luca Trevsan September 5, 07 Summary of Lecture 4 In whch we ntroduce semdefnte programmng and apply t to Max Cut. Semdefnte Programmng Recall that
U.C. Berkeley CS94: Beyond Worst-Case Analyss Handout 4s Luca Trevsan September 5, 07 Summary of Lecture 4 In whch we ntroduce semdefnte programmng and apply t to Max Cut. Semdefnte Programmng Recall that