Cross Directional Control
|
|
|
- Julia Atkinson
- 5 years ago
- Views:
Transcription


1 Cross Directional Control Graham C. Goodwin Day 4: Lecture 4 16th September 2004 International Summer School Grenoble, France
2 1. Introduction In this lecture we describe a practical application of receding horizon control to a common industrial problem, namely web-forming processes. Web-forming processes represent a wide class of industrial processes with relevance in many different areas such as paper making, plastic film extrusion, steel rolling, coating and laminating.
3 In a general set up, web processes (also known as film and sheet forming processes) are characterised by raw material entering one end of the process machine and a thin web or film being produced in (possibly) several stages at the other end of the machine. The raw material is fed to the machine in a continuous or semi-continuous fashion and its flow through the web-forming machine is generally referred to as the machine direction [MD].
4 Sheet and film processes are effectively two-dimensional spatially distributed processes with several of the properties of the sheet of material varying in both the machine direction and in the direction across the sheet known as the cross direction [CD].
5 actuators cross direction sensors machine direction Figure: Generic web-forming process.
6 The main objective of the control applied to sheet and film processes is to maintain both the MD and CD profiles of the sheet as flat as possible, in spite of disturbances such as variations in the composition of the raw material fed to the machine, uneven distribution of the material in the cross direction, and deviations in the cross-directional profile.
7 In order to control the cross-directional profile of the web, several actuators are evenly distributed along the cross direction of the sheet. The number of actuators can vary from only 30 up to as high as 300. The film properties, on the other hand, are either measured via an array of sensors placed in a downstream position or via a scanning sensor that moves back and forth in the cross direction. The number of measurements taken by a single scan of the sensor can be up to 1000.
8 Difficulties the high dimensionality of the cross-directional system; the high cross-direction spatial interaction between actuators; the uncertainty in the model; the limited control authority of the actuators.
9 2. Problem Formulation It is generally the case that web-forming processes can be effectively modelled by assuming a decoupled spatial and dynamical response. This is equivalent to saying that the effect of one single actuator movement is almost instantaneous in the cross direction whilst its effect in the machine direction shows a certain dynamic behaviour.
10 These observations allow one to consider a general model for a cross-directional system of the form where q 1 is the unitary shift operator. y k = q d h(q) Buk + d k, (1)
11 It is assumed that the system dynamics are the same across the machine and thus h(q) can be taken to be a scalar transfer function. In addition, h(q) is typically taken to be a low order, stable and minimum-phase transfer function. A typical model is a simple first-order system with unit gain: h(q)= (1 α) q α. (2) A transport delay q d accounts for the physical separation that exists between the actuators and the sensors in a typical cross-directional process application.
12 The matrix B is the normalised steady state interaction matrix and represents the spatial influence of each actuator on the system outputs. In most applications it is reasonably assumed that the steady state cross-directional profile generated by each actuator is identical. As a result, the interaction matrix B usually has the structure of a Toeplitz symmetric matrix.
13 The main difficulties in dealing with cross-directional control problems are related to the spatial interaction between actuators and not so much to the complexity of dynamics, which could reasonably be regarded as benign. A key feature is that a single actuator movement not only affects a single sensor measurement in the downstream position but also influences sensors placed in nearby locations. Indeed, the interaction matrix B is typically poorly conditioned in most cases of practical importance.
14 The poor conditioning of B can be quantified via a singular value decomposition B= USV T (3) where S, U, V R m m. S= diag{σ 1,σ 2,...,σ m } is a diagonal matrix with positive singular values arranged in decreasing order, and U and V are orthogonal matrices such that UU T = U T U= I m and VV T = V T V= I m, where I m is the m m identity matrix. If B is symmetric then U= V.
15 If B is poorly conditioned then the last singular values on the diagonal of S are very small compared to the singular values at the top of the chain{σ i } m. This characteristic implies that the control i=1 directions associated with the smallest singular values are more difficult to control than those associated with the biggest singular values, in the sense that a larger control effort is required to compensate for disturbances acting in directions associated with smallσ i.
16 This constitutes not only a problem in terms of the limited control authority usually available in the array of actuators, but it is also an indication of the sensitivity of the closed loop to uncertainties in the spatial components of the model.
17 The control objective in cross-directional control systems is usually stated as the requirement to minimise the variations of the output profile subject to input constraints. This can be stated in terms of minimising the following objective function: subject to input constraints V = y k 2 2 k=0 u k u max. (4)
18 Another type of constraint typical of CD control systems is a second-order bending constraint defined as 1 u i+1 k u i k b max for i= 1,...,m, (5) where u i k = ui k ui 1 is the deviation between adjacent actuators k in the input profile at a given time instant k. 1 The superscript indicates the actuator number.
19 3. Example 1 To illustrate the ideas involved in cross-directional control, we consider a 21-by-21 interaction matrix B with a Toeplitz symmetric structure and exponential profile: b ij = e 0.2 i j for i, j= 1,...,21, (6) where b ij are the entries of the matrix B.
20 Cross-directional index Figure: Cross-directional profile for a unit step in actuator number 11.
21 We consider the transfer function h(q)= 1 e 0.2 q e 0.2, (7) which is a discretised version of the first-order system ẏ(t)= y(t)+u(t) with sampling period T s = 0.2 sec.
22 The next figure shows the singular values of the interaction matrix B. We observe that there exists a significant difference between the largest singular valueσ 1 and the smallest singular valueσ 21, indicating that the matrix is poorly conditioned. Dealing with the poor conditioning of B is one of the main challenges in CD control problems as we will see later.
23 Singular values index Figure: Singular values of the interaction matrix B.
24 In order to estimate the states of the system and the output disturbance d k, a Kalman filter is implemented as described for an extended system that includes the dynamics of a constant output disturbance: x k+1 = Ax k + Bu k, d k+1 = d k, y k = Cx k + d k,
25 In our case A= diag{e 0.2,...,e 0.2 }, B= (1 e 0.2 ) B, C= I m.
26 The state noise covariance [ ] Im 0 Q n =, 0 100I m and output noise covariance R n = I m, were considered in the design of the Kalman filter.
27 We will consider the finite horizon quadratic objective function with both prediction and control horizons set equal to one, that is V 1,1 = 1 2 (yt 0 Qy 0+ u T 0 Ru 0+ x T 1 Px 1). (8) Q= I m, R= 0.1I m. (9)
28 We assume the system is subject to physical constraints on the inputs of the form: u i k 1 for all k, i= 1,...,21.
29 Design 1 The first control strategy that we try on the problem is a linear quadratic Gaussian [LQG] controller designed with the same weighting matrices as above. This design clearly does not take into consideration the constraints imposed on the input profile. As might be expected, the application of such a blind (or serendipitous) approach to the problem would, in general, not achieve satisfactory performance.
30 Input clipping Input clipping disturbance Cross-directional index (a) Input profile Cross-directional index (b) Output profile. Figure: Input-output steady state profiles with input clipping.
31 The above results illustrates a phenomenon that is well known in the area of cross-directional control, namely alternate inputs across the strip converge to large alternate values, that is, input picketing occurs. We will see below, when we test alternative design methods, that this picketing effect can be avoided by careful design leading to significantly improved disturbance compensation.
32 Design 2 We next try RHC considering initially only input constraints. The achieved steady state input and output profiles are presented below where we have also included, for comparison, the profiles obtained with the input clipping approach.
33 Input clipping RHC 1 Input clipping RHC disturbance Cross-directional index Cross-directional index (a) Input profile. (b) Output profile. Figure: Input-output steady state profiles using RHC (square-dashed line) and input clipping (circle-solid line).
34 We observe, perhaps surprisingly, that the steady state response achieved with RHC does not seem to have improved significantly compared with the result obtained by just clipping the control in the LQG controller. In addition, the input profile obtained with RHC seems to be dominated by the same high spatial frequency modes as those that resulted from the input clipping approach.
35 However, this is a reasonably well understood difficulty in CD control systems: The picket fence profile in the input arises from the controller trying to compensate for the components of the disturbance in the high spatial modes which, in turn, require bigger control effort, driving the inputs quickly into saturation.
36 Design 3 (Using the Singular Value Structure of the Hessian The commonly accepted solution to this inherent difficulty is to let the controller seek disturbance compensation only in the low spatial frequencies.
37 When the prediction horizon chosen is N= 1 then in the vector formulation of the quadratic optimisation problem we can write Γ=B and the Hessian of the objective function is simply H= B T QB+ R = BT B+ R. This implies that the singular values of the Hessian are simply the singular values squared of the interaction matrix B shifted by the weighting in the input R.
38 We next limit the optimization to the first few singular vectors. This has two potential advantages: (i) It avoids chasing hard to control high spatial frequency distances. (ii) It may improve robustness since the gain associated with high spatial frequencies may be poorly defined.
39 SVD RHC strategy RHC 1 SVD RHC strategy RHC disturbance Cross-directional index Cross-directional index (a) Input profile. (b) Output profile. Figure: Input and output steady state profiles using the SVD RHC strategy (circle-solid line) and RHC (square-dashed line).
40 We observe that in this case the picket fence profile has disappeared from the input whilst the output profile has not changed significantly. Clearly a slight degradation of the output variance is to be expected owing to the suboptimality of the strategy. The steady state profiles obtained with RHC have been repeated in the above figure for comparison purposes.
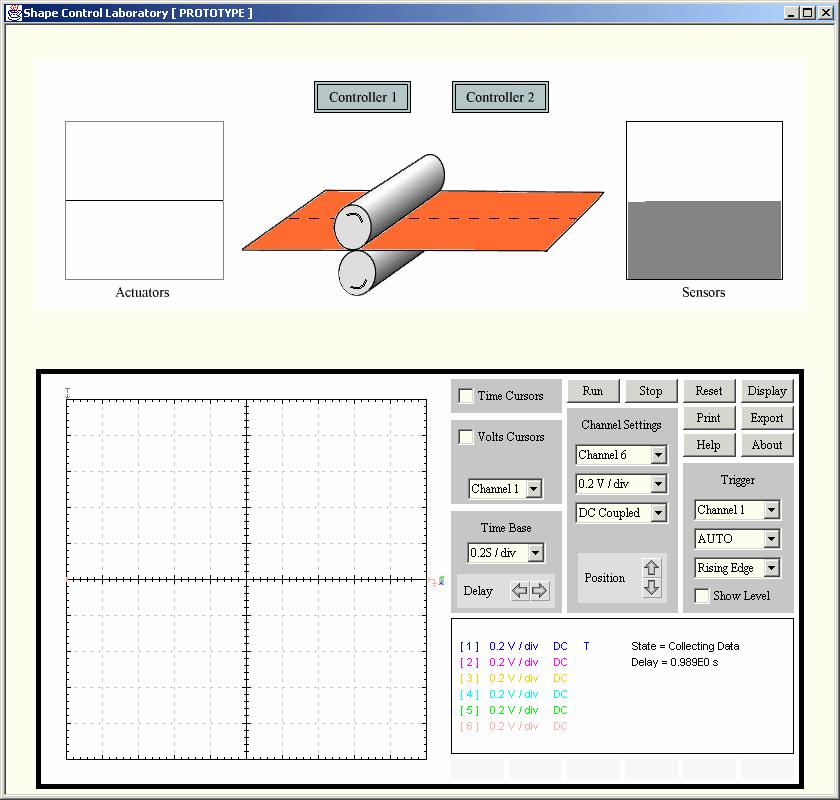
41 4. Example 2 We conclude this lecture with a second example having 11 actuators and 11 sensors. Here we will run the simulations in real time so that you can see the picketing develop when the disturbance is applied.
42
43

44
45 5. Conclusions This lecture has presented a realistic application of constrained control to a difficult industrial control problem, namely cross directional control. This system has high complexity due to: i. the large number of actuators (several hundred), ii. large interactions, and iii. severe constraints on the actuator signals.
Lecture 7 LQG Design. Linear Quadratic Gaussian regulator Control-estimation duality SRL for optimal estimator Example of LQG design for MIMO plant
 L7: Lecture 7 LQG Design Linear Quadratic Gaussian regulator Control-estimation duality SRL for optimal estimator Example of LQG design for IO plant LQG regulator L7:2 If the process and measurement noises
L7: Lecture 7 LQG Design Linear Quadratic Gaussian regulator Control-estimation duality SRL for optimal estimator Example of LQG design for IO plant LQG regulator L7:2 If the process and measurement noises
Here represents the impulse (or delta) function. is an diagonal matrix of intensities, and is an diagonal matrix of intensities.
 function. is an diagonal matrix of intensities, and is an diagonal matrix of intensities.") 19 KALMAN FILTER 19.1 Introduction In the previous section, we derived the linear quadratic regulator as an optimal solution for the fullstate feedback control problem. The inherent assumption was that
19 KALMAN FILTER 19.1 Introduction In the previous section, we derived the linear quadratic regulator as an optimal solution for the fullstate feedback control problem. The inherent assumption was that
Structure of the Hessian
 Structure of the Hessian Graham C. Goodwin September 2004 1. Introduction We saw in earlier lectures that a core ingredient in quadratic constrained optimisation problems is the Hessian matrix H. So far
Structure of the Hessian Graham C. Goodwin September 2004 1. Introduction We saw in earlier lectures that a core ingredient in quadratic constrained optimisation problems is the Hessian matrix H. So far
On-off Control: Audio Applications
 On-off Control: Audio Applications Graham C. Goodwin Day 4: Lecture 3 16th September 2004 International Summer School Grenoble, France 1 Background In this lecture we address the issue of control when
On-off Control: Audio Applications Graham C. Goodwin Day 4: Lecture 3 16th September 2004 International Summer School Grenoble, France 1 Background In this lecture we address the issue of control when
Linear Algebra (Review) Volker Tresp 2017
 Volker Tresp 2017") Linear Algebra (Review) Volker Tresp 2017 1 Vectors k is a scalar (a number) c is a column vector. Thus in two dimensions, c = ( c1 c 2 ) (Advanced: More precisely, a vector is defined in a vector space.
Linear Algebra (Review) Volker Tresp 2017 1 Vectors k is a scalar (a number) c is a column vector. Thus in two dimensions, c = ( c1 c 2 ) (Advanced: More precisely, a vector is defined in a vector space.
A METHOD OF ADAPTATION BETWEEN STEEPEST- DESCENT AND NEWTON S ALGORITHM FOR MULTI- CHANNEL ACTIVE CONTROL OF TONAL NOISE AND VIBRATION
 A METHOD OF ADAPTATION BETWEEN STEEPEST- DESCENT AND NEWTON S ALGORITHM FOR MULTI- CHANNEL ACTIVE CONTROL OF TONAL NOISE AND VIBRATION Jordan Cheer and Stephen Daley Institute of Sound and Vibration Research,
A METHOD OF ADAPTATION BETWEEN STEEPEST- DESCENT AND NEWTON S ALGORITHM FOR MULTI- CHANNEL ACTIVE CONTROL OF TONAL NOISE AND VIBRATION Jordan Cheer and Stephen Daley Institute of Sound and Vibration Research,
Lecture 9. Introduction to Kalman Filtering. Linear Quadratic Gaussian Control (LQG) G. Hovland 2004
 G. Hovland 2004") MER42 Advanced Control Lecture 9 Introduction to Kalman Filtering Linear Quadratic Gaussian Control (LQG) G. Hovland 24 Announcement No tutorials on hursday mornings 8-9am I will be present in all practical
MER42 Advanced Control Lecture 9 Introduction to Kalman Filtering Linear Quadratic Gaussian Control (LQG) G. Hovland 24 Announcement No tutorials on hursday mornings 8-9am I will be present in all practical
Optimal Polynomial Control for Discrete-Time Systems
 1 Optimal Polynomial Control for Discrete-Time Systems Prof Guy Beale Electrical and Computer Engineering Department George Mason University Fairfax, Virginia Correspondence concerning this paper should
1 Optimal Polynomial Control for Discrete-Time Systems Prof Guy Beale Electrical and Computer Engineering Department George Mason University Fairfax, Virginia Correspondence concerning this paper should
Assignment #10: Diagonalization of Symmetric Matrices, Quadratic Forms, Optimization, Singular Value Decomposition. Name:
 Assignment #10: Diagonalization of Symmetric Matrices, Quadratic Forms, Optimization, Singular Value Decomposition Due date: Friday, May 4, 2018 (1:35pm) Name: Section Number Assignment #10: Diagonalization
Assignment #10: Diagonalization of Symmetric Matrices, Quadratic Forms, Optimization, Singular Value Decomposition Due date: Friday, May 4, 2018 (1:35pm) Name: Section Number Assignment #10: Diagonalization
ECE295, Data Assimila0on and Inverse Problems, Spring 2015
 ECE295, Data Assimila0on and Inverse Problems, Spring 2015 1 April, Intro; Linear discrete Inverse problems (Aster Ch 1 and 2) Slides 8 April, SVD (Aster ch 2 and 3) Slides 15 April, RegularizaFon (ch
ECE295, Data Assimila0on and Inverse Problems, Spring 2015 1 April, Intro; Linear discrete Inverse problems (Aster Ch 1 and 2) Slides 8 April, SVD (Aster ch 2 and 3) Slides 15 April, RegularizaFon (ch
Signal Analysis. Principal Component Analysis
 Multi dimensional Signal Analysis Lecture 2E Principal Component Analysis Subspace representation Note! Given avector space V of dimension N a scalar product defined by G 0 a subspace U of dimension M
Multi dimensional Signal Analysis Lecture 2E Principal Component Analysis Subspace representation Note! Given avector space V of dimension N a scalar product defined by G 0 a subspace U of dimension M
Asymptotic behaviour of Toeplitz matrix in multi-input multi-output model predictive control
 23 European Control Conference ECC) July 7-9, 23, Zürich, Switzerland Asymptotic behaviour of Toeplitz matrix in multi-input multi-output model predictive control Quang Tran, Leyla Özkan, Jobert Ludlage
23 European Control Conference ECC) July 7-9, 23, Zürich, Switzerland Asymptotic behaviour of Toeplitz matrix in multi-input multi-output model predictive control Quang Tran, Leyla Özkan, Jobert Ludlage
Regional Solution of Constrained LQ Optimal Control
 Regional Solution of Constrained LQ Optimal Control José DeDoná September 2004 Outline 1 Recap on the Solution for N = 2 2 Regional Explicit Solution Comparison with the Maximal Output Admissible Set 3
Regional Solution of Constrained LQ Optimal Control José DeDoná September 2004 Outline 1 Recap on the Solution for N = 2 2 Regional Explicit Solution Comparison with the Maximal Output Admissible Set 3
Lifted approach to ILC/Repetitive Control
 Lifted approach to ILC/Repetitive Control Okko H. Bosgra Maarten Steinbuch TUD Delft Centre for Systems and Control TU/e Control System Technology Dutch Institute of Systems and Control DISC winter semester
Lifted approach to ILC/Repetitive Control Okko H. Bosgra Maarten Steinbuch TUD Delft Centre for Systems and Control TU/e Control System Technology Dutch Institute of Systems and Control DISC winter semester
The Uncertainty Threshold Principle: Some Fundamental Limitations of Optimal Decision Making under Dynamic Uncertainty
 The Uncertainty Threshold Principle: Some Fundamental Limitations of Optimal Decision Making under Dynamic Uncertainty Michael Athans, Richard Ku, Stanley Gershwin (Nicholas Ballard 538477) Introduction
The Uncertainty Threshold Principle: Some Fundamental Limitations of Optimal Decision Making under Dynamic Uncertainty Michael Athans, Richard Ku, Stanley Gershwin (Nicholas Ballard 538477) Introduction
Lecture: Face Recognition and Feature Reduction
 Lecture: Face Recognition and Feature Reduction Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 Recap - Curse of dimensionality Assume 5000 points uniformly distributed in the
Lecture: Face Recognition and Feature Reduction Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 Recap - Curse of dimensionality Assume 5000 points uniformly distributed in the
Linear Algebra (Review) Volker Tresp 2018
 Volker Tresp 2018") Linear Algebra (Review) Volker Tresp 2018 1 Vectors k, M, N are scalars A one-dimensional array c is a column vector. Thus in two dimensions, ( ) c1 c = c 2 c i is the i-th component of c c T = (c 1, c
Linear Algebra (Review) Volker Tresp 2018 1 Vectors k, M, N are scalars A one-dimensional array c is a column vector. Thus in two dimensions, ( ) c1 c = c 2 c i is the i-th component of c c T = (c 1, c
ON THE ACCURACY OF SCALAR DISSIPATION MEASUREMENTS BY LASER RAYLEIGH SCATERING.
 ON THE ACCURACY OF SCALAR DISSIPATION MEASUREMENTS BY LASER RAYLEIGH SCATERING. P.Ferrão, M.V Heitor and R. Salles Instituto Superior Técnico Mechanical Engineering Department Technical University of Lisbon
ON THE ACCURACY OF SCALAR DISSIPATION MEASUREMENTS BY LASER RAYLEIGH SCATERING. P.Ferrão, M.V Heitor and R. Salles Instituto Superior Técnico Mechanical Engineering Department Technical University of Lisbon
DS-GA 1002 Lecture notes 10 November 23, Linear models
 DS-GA 2 Lecture notes November 23, 2 Linear functions Linear models A linear model encodes the assumption that two quantities are linearly related. Mathematically, this is characterized using linear functions.
DS-GA 2 Lecture notes November 23, 2 Linear functions Linear models A linear model encodes the assumption that two quantities are linearly related. Mathematically, this is characterized using linear functions.
OPTIMAL CONTROL AND ESTIMATION
 OPTIMAL CONTROL AND ESTIMATION Robert F. Stengel Department of Mechanical and Aerospace Engineering Princeton University, Princeton, New Jersey DOVER PUBLICATIONS, INC. New York CONTENTS 1. INTRODUCTION
OPTIMAL CONTROL AND ESTIMATION Robert F. Stengel Department of Mechanical and Aerospace Engineering Princeton University, Princeton, New Jersey DOVER PUBLICATIONS, INC. New York CONTENTS 1. INTRODUCTION
Subspace Identification
 Chapter 10 Subspace Identification Given observations of m 1 input signals, and p 1 signals resulting from those when fed into a dynamical system under study, can we estimate the internal dynamics regulating
Chapter 10 Subspace Identification Given observations of m 1 input signals, and p 1 signals resulting from those when fed into a dynamical system under study, can we estimate the internal dynamics regulating
Lecture: Face Recognition and Feature Reduction
 Lecture: Face Recognition and Feature Reduction Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab Lecture 11-1 Recap - Curse of dimensionality Assume 5000 points uniformly distributed
Lecture: Face Recognition and Feature Reduction Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab Lecture 11-1 Recap - Curse of dimensionality Assume 5000 points uniformly distributed
Full-State Feedback Design for a Multi-Input System
 Full-State Feedback Design for a Multi-Input System A. Introduction The open-loop system is described by the following state space model. x(t) = Ax(t)+Bu(t), y(t) =Cx(t)+Du(t) () 4 8.5 A =, B =.5.5, C
Full-State Feedback Design for a Multi-Input System A. Introduction The open-loop system is described by the following state space model. x(t) = Ax(t)+Bu(t), y(t) =Cx(t)+Du(t) () 4 8.5 A =, B =.5.5, C
The Singular Value Decomposition
 The Singular Value Decomposition Philippe B. Laval KSU Fall 2015 Philippe B. Laval (KSU) SVD Fall 2015 1 / 13 Review of Key Concepts We review some key definitions and results about matrices that will
The Singular Value Decomposition Philippe B. Laval KSU Fall 2015 Philippe B. Laval (KSU) SVD Fall 2015 1 / 13 Review of Key Concepts We review some key definitions and results about matrices that will
Lecture 6. Numerical methods. Approximation of functions
 Lecture 6 Numerical methods Approximation of functions Lecture 6 OUTLINE 1. Approximation and interpolation 2. Least-square method basis functions design matrix residual weighted least squares normal equation
Lecture 6 Numerical methods Approximation of functions Lecture 6 OUTLINE 1. Approximation and interpolation 2. Least-square method basis functions design matrix residual weighted least squares normal equation
2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303)
") MIT OpenCourseWare http://ocw.mit.edu 2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303) Spring 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.
MIT OpenCourseWare http://ocw.mit.edu 2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303) Spring 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.
LQR, Kalman Filter, and LQG. Postgraduate Course, M.Sc. Electrical Engineering Department College of Engineering University of Salahaddin
 LQR, Kalman Filter, and LQG Postgraduate Course, M.Sc. Electrical Engineering Department College of Engineering University of Salahaddin May 2015 Linear Quadratic Regulator (LQR) Consider a linear system
LQR, Kalman Filter, and LQG Postgraduate Course, M.Sc. Electrical Engineering Department College of Engineering University of Salahaddin May 2015 Linear Quadratic Regulator (LQR) Consider a linear system
1 Linearity and Linear Systems
 Mathematical Tools for Neuroscience (NEU 34) Princeton University, Spring 26 Jonathan Pillow Lecture 7-8 notes: Linear systems & SVD Linearity and Linear Systems Linear system is a kind of mapping f( x)
Mathematical Tools for Neuroscience (NEU 34) Princeton University, Spring 26 Jonathan Pillow Lecture 7-8 notes: Linear systems & SVD Linearity and Linear Systems Linear system is a kind of mapping f( x)
15 Singular Value Decomposition
 15 Singular Value Decomposition For any high-dimensional data analysis, one s first thought should often be: can I use an SVD? The singular value decomposition is an invaluable analysis tool for dealing
15 Singular Value Decomposition For any high-dimensional data analysis, one s first thought should often be: can I use an SVD? The singular value decomposition is an invaluable analysis tool for dealing
Gaussian Filtering Strategies for Nonlinear Systems
 Gaussian Filtering Strategies for Nonlinear Systems Canonical Nonlinear Filtering Problem ~u m+1 = ~ f (~u m )+~ m+1 ~v m+1 = ~g(~u m+1 )+~ o m+1 I ~ f and ~g are nonlinear & deterministic I Noise/Errors
Gaussian Filtering Strategies for Nonlinear Systems Canonical Nonlinear Filtering Problem ~u m+1 = ~ f (~u m )+~ m+1 ~v m+1 = ~g(~u m+1 )+~ o m+1 I ~ f and ~g are nonlinear & deterministic I Noise/Errors
Linear-Quadratic-Gaussian (LQG) Controllers and Kalman Filters
 Controllers and Kalman Filters") Linear-Quadratic-Gaussian (LQG) Controllers and Kalman Filters Emo Todorov Applied Mathematics and Computer Science & Engineering University of Washington Winter 204 Emo Todorov (UW) AMATH/CSE 579, Winter
Linear-Quadratic-Gaussian (LQG) Controllers and Kalman Filters Emo Todorov Applied Mathematics and Computer Science & Engineering University of Washington Winter 204 Emo Todorov (UW) AMATH/CSE 579, Winter
Multivariate Statistical Analysis
 Multivariate Statistical Analysis Fall 2011 C. L. Williams, Ph.D. Lecture 4 for Applied Multivariate Analysis Outline 1 Eigen values and eigen vectors Characteristic equation Some properties of eigendecompositions
Multivariate Statistical Analysis Fall 2011 C. L. Williams, Ph.D. Lecture 4 for Applied Multivariate Analysis Outline 1 Eigen values and eigen vectors Characteristic equation Some properties of eigendecompositions
An SVD based strategy for receding horizon control of input constrained linear systems
 An SVD based strategy for receding horizon control of input constrained linear systems Osvaldo J. Rojas, Graham C. Goodwin, María M. Serón and Arie Feuer School of Electrical Engineering & Computer Science
An SVD based strategy for receding horizon control of input constrained linear systems Osvaldo J. Rojas, Graham C. Goodwin, María M. Serón and Arie Feuer School of Electrical Engineering & Computer Science
State Observers and the Kalman filter
 Modelling and Control of Dynamic Systems State Observers and the Kalman filter Prof. Oreste S. Bursi University of Trento Page 1 Feedback System State variable feedback system: Control feedback law:u =
Modelling and Control of Dynamic Systems State Observers and the Kalman filter Prof. Oreste S. Bursi University of Trento Page 1 Feedback System State variable feedback system: Control feedback law:u =
ELEC E7210: Communication Theory. Lecture 10: MIMO systems
 ELEC E7210: Communication Theory Lecture 10: MIMO systems Matrix Definitions, Operations, and Properties (1) NxM matrix a rectangular array of elements a A. an 11 1....... a a 1M. NM B D C E ermitian transpose
ELEC E7210: Communication Theory Lecture 10: MIMO systems Matrix Definitions, Operations, and Properties (1) NxM matrix a rectangular array of elements a A. an 11 1....... a a 1M. NM B D C E ermitian transpose
Homework 1. Yuan Yao. September 18, 2011
 Homework 1 Yuan Yao September 18, 2011 1. Singular Value Decomposition: The goal of this exercise is to refresh your memory about the singular value decomposition and matrix norms. A good reference to
Homework 1 Yuan Yao September 18, 2011 1. Singular Value Decomposition: The goal of this exercise is to refresh your memory about the singular value decomposition and matrix norms. A good reference to
Maths for Signals and Systems Linear Algebra in Engineering
 Maths for Signals and Systems Linear Algebra in Engineering Lectures 13 15, Tuesday 8 th and Friday 11 th November 016 DR TANIA STATHAKI READER (ASSOCIATE PROFFESOR) IN SIGNAL PROCESSING IMPERIAL COLLEGE
Maths for Signals and Systems Linear Algebra in Engineering Lectures 13 15, Tuesday 8 th and Friday 11 th November 016 DR TANIA STATHAKI READER (ASSOCIATE PROFFESOR) IN SIGNAL PROCESSING IMPERIAL COLLEGE
Secure Control Against Replay Attacks
 Secure Control Against Replay Attacks Bruno Sinopoli, Yilin Mo Department of Electrical and Computer Engineering, Carnegie Mellon Trust Autumn 2009 Conference Bruno Sinopoli (Carnegie Mellon) Secure Control
Secure Control Against Replay Attacks Bruno Sinopoli, Yilin Mo Department of Electrical and Computer Engineering, Carnegie Mellon Trust Autumn 2009 Conference Bruno Sinopoli (Carnegie Mellon) Secure Control
CALIFORNIA INSTITUTE OF TECHNOLOGY Control and Dynamical Systems. CDS 110b
 CALIFORNIA INSTITUTE OF TECHNOLOGY Control and Dynamical Systems CDS 110b R. M. Murray Kalman Filters 25 January 2006 Reading: This set of lectures provides a brief introduction to Kalman filtering, following
CALIFORNIA INSTITUTE OF TECHNOLOGY Control and Dynamical Systems CDS 110b R. M. Murray Kalman Filters 25 January 2006 Reading: This set of lectures provides a brief introduction to Kalman filtering, following
Constrained Linear Quadratic Optimal Control
 5 Constrained Linear Quadratic Optimal Control 51 Overview Up to this point we have considered rather general nonlinear receding horizon optimal control problems Whilst we have been able to establish some
5 Constrained Linear Quadratic Optimal Control 51 Overview Up to this point we have considered rather general nonlinear receding horizon optimal control problems Whilst we have been able to establish some
10. FIELD APPLICATION: 1D SOIL MOISTURE PROFILE ESTIMATION
 Chapter 1 Field Application: 1D Soil Moisture Profile Estimation Page 1-1 CHAPTER TEN 1. FIELD APPLICATION: 1D SOIL MOISTURE PROFILE ESTIMATION The computationally efficient soil moisture model ABDOMEN,
Chapter 1 Field Application: 1D Soil Moisture Profile Estimation Page 1-1 CHAPTER TEN 1. FIELD APPLICATION: 1D SOIL MOISTURE PROFILE ESTIMATION The computationally efficient soil moisture model ABDOMEN,
L26: Advanced dimensionality reduction
 L26: Advanced dimensionality reduction The snapshot CA approach Oriented rincipal Components Analysis Non-linear dimensionality reduction (manifold learning) ISOMA Locally Linear Embedding CSCE 666 attern
L26: Advanced dimensionality reduction The snapshot CA approach Oriented rincipal Components Analysis Non-linear dimensionality reduction (manifold learning) ISOMA Locally Linear Embedding CSCE 666 attern
Linear-Quadratic Optimal Control: Full-State Feedback
 Chapter 4 Linear-Quadratic Optimal Control: Full-State Feedback 1 Linear quadratic optimization is a basic method for designing controllers for linear (and often nonlinear) dynamical systems and is actually
Chapter 4 Linear-Quadratic Optimal Control: Full-State Feedback 1 Linear quadratic optimization is a basic method for designing controllers for linear (and often nonlinear) dynamical systems and is actually
Econ Slides from Lecture 8
 Econ 205 Sobel Econ 205 - Slides from Lecture 8 Joel Sobel September 1, 2010 Computational Facts 1. det AB = det BA = det A det B 2. If D is a diagonal matrix, then det D is equal to the product of its
Econ 205 Sobel Econ 205 - Slides from Lecture 8 Joel Sobel September 1, 2010 Computational Facts 1. det AB = det BA = det A det B 2. If D is a diagonal matrix, then det D is equal to the product of its
4F3 - Predictive Control
 4F3 Predictive Control - Lecture 2 p 1/23 4F3 - Predictive Control Lecture 2 - Unconstrained Predictive Control Jan Maciejowski jmm@engcamacuk 4F3 Predictive Control - Lecture 2 p 2/23 References Predictive
4F3 Predictive Control - Lecture 2 p 1/23 4F3 - Predictive Control Lecture 2 - Unconstrained Predictive Control Jan Maciejowski jmm@engcamacuk 4F3 Predictive Control - Lecture 2 p 2/23 References Predictive
LECTURE NOTE #10 PROF. ALAN YUILLE
 LECTURE NOTE #10 PROF. ALAN YUILLE 1. Principle Component Analysis (PCA) One way to deal with the curse of dimensionality is to project data down onto a space of low dimensions, see figure (1). Figure
LECTURE NOTE #10 PROF. ALAN YUILLE 1. Principle Component Analysis (PCA) One way to deal with the curse of dimensionality is to project data down onto a space of low dimensions, see figure (1). Figure
RECURSIVE SUBSPACE IDENTIFICATION IN THE LEAST SQUARES FRAMEWORK
 RECURSIVE SUBSPACE IDENTIFICATION IN THE LEAST SQUARES FRAMEWORK TRNKA PAVEL AND HAVLENA VLADIMÍR Dept of Control Engineering, Czech Technical University, Technická 2, 166 27 Praha, Czech Republic mail:
RECURSIVE SUBSPACE IDENTIFICATION IN THE LEAST SQUARES FRAMEWORK TRNKA PAVEL AND HAVLENA VLADIMÍR Dept of Control Engineering, Czech Technical University, Technická 2, 166 27 Praha, Czech Republic mail:
Least Squares Optimization
 Least Squares Optimization The following is a brief review of least squares optimization and constrained optimization techniques. I assume the reader is familiar with basic linear algebra, including the
Least Squares Optimization The following is a brief review of least squares optimization and constrained optimization techniques. I assume the reader is familiar with basic linear algebra, including the
Linear State Feedback Controller Design
 Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
STATE ESTIMATION IN COORDINATED CONTROL WITH A NON-STANDARD INFORMATION ARCHITECTURE. Jun Yan, Keunmo Kang, and Robert Bitmead
 STATE ESTIMATION IN COORDINATED CONTROL WITH A NON-STANDARD INFORMATION ARCHITECTURE Jun Yan, Keunmo Kang, and Robert Bitmead Department of Mechanical & Aerospace Engineering University of California San
STATE ESTIMATION IN COORDINATED CONTROL WITH A NON-STANDARD INFORMATION ARCHITECTURE Jun Yan, Keunmo Kang, and Robert Bitmead Department of Mechanical & Aerospace Engineering University of California San
Control System Design
 ELEC ENG 4CL4: Control System Design Notes for Lecture #24 Wednesday, March 10, 2004 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Remedies We next turn to the question
ELEC ENG 4CL4: Control System Design Notes for Lecture #24 Wednesday, March 10, 2004 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Remedies We next turn to the question
EL2520 Control Theory and Practice
 EL2520 Control Theory and Practice Lecture 8: Linear quadratic control Mikael Johansson School of Electrical Engineering KTH, Stockholm, Sweden Linear quadratic control Allows to compute the controller
EL2520 Control Theory and Practice Lecture 8: Linear quadratic control Mikael Johansson School of Electrical Engineering KTH, Stockholm, Sweden Linear quadratic control Allows to compute the controller
4F3 - Predictive Control
 4F3 Predictive Control - Lecture 3 p 1/21 4F3 - Predictive Control Lecture 3 - Predictive Control with Constraints Jan Maciejowski jmm@engcamacuk 4F3 Predictive Control - Lecture 3 p 2/21 Constraints on
4F3 Predictive Control - Lecture 3 p 1/21 4F3 - Predictive Control Lecture 3 - Predictive Control with Constraints Jan Maciejowski jmm@engcamacuk 4F3 Predictive Control - Lecture 3 p 2/21 Constraints on
Linear Regression and Its Applications
 Linear Regression and Its Applications Predrag Radivojac October 13, 2014 Given a data set D = {(x i, y i )} n the objective is to learn the relationship between features and the target. We usually start
Linear Regression and Its Applications Predrag Radivojac October 13, 2014 Given a data set D = {(x i, y i )} n the objective is to learn the relationship between features and the target. We usually start
CRC for Robust and Adaptive Systems. Peter J Kootsookos. Abstract. This paper develops an adaptive controller for active vibration control.
 Closed-loop Frequency Tracking and Rejection Allan J Connolly CRC for Robust and Adaptive Systems Department of Systems Engineering The Australian National University, Canberra ACT 0200 Australia Barbara
Closed-loop Frequency Tracking and Rejection Allan J Connolly CRC for Robust and Adaptive Systems Department of Systems Engineering The Australian National University, Canberra ACT 0200 Australia Barbara
Problem 1: Toolbox (25 pts) For all of the parts of this problem, you are limited to the following sets of tools:
 For all of the parts of this problem, you are limited to the following sets of tools:") CS 322 Final Exam Friday 18 May 2007 150 minutes Problem 1: Toolbox (25 pts) For all of the parts of this problem, you are limited to the following sets of tools: (A) Runge-Kutta 4/5 Method (B) Condition
CS 322 Final Exam Friday 18 May 2007 150 minutes Problem 1: Toolbox (25 pts) For all of the parts of this problem, you are limited to the following sets of tools: (A) Runge-Kutta 4/5 Method (B) Condition
EECE Adaptive Control
 EECE 574 - Adaptive Control Overview Guy Dumont Department of Electrical and Computer Engineering University of British Columbia Lectures: Thursday 09h00-12h00 Location: PPC 101 Guy Dumont (UBC) EECE 574
EECE 574 - Adaptive Control Overview Guy Dumont Department of Electrical and Computer Engineering University of British Columbia Lectures: Thursday 09h00-12h00 Location: PPC 101 Guy Dumont (UBC) EECE 574
The Singular Value Decomposition and Least Squares Problems
 The Singular Value Decomposition and Least Squares Problems Tom Lyche Centre of Mathematics for Applications, Department of Informatics, University of Oslo September 27, 2009 Applications of SVD solving
The Singular Value Decomposition and Least Squares Problems Tom Lyche Centre of Mathematics for Applications, Department of Informatics, University of Oslo September 27, 2009 Applications of SVD solving
Predictive Control of Gyroscopic-Force Actuators for Mechanical Vibration Damping
 ARC Centre of Excellence for Complex Dynamic Systems and Control, pp 1 15 Predictive Control of Gyroscopic-Force Actuators for Mechanical Vibration Damping Tristan Perez 1, 2 Joris B Termaat 3 1 School
ARC Centre of Excellence for Complex Dynamic Systems and Control, pp 1 15 Predictive Control of Gyroscopic-Force Actuators for Mechanical Vibration Damping Tristan Perez 1, 2 Joris B Termaat 3 1 School
Linear Combinations of Optic Flow Vectors for Estimating Self-Motion a Real-World Test of a Neural Model
 Linear Combinations of Optic Flow Vectors for Estimating Self-Motion a Real-World Test of a Neural Model Matthias O. Franz MPI für biologische Kybernetik Spemannstr. 38 D-72076 Tübingen, Germany mof@tuebingen.mpg.de
Linear Combinations of Optic Flow Vectors for Estimating Self-Motion a Real-World Test of a Neural Model Matthias O. Franz MPI für biologische Kybernetik Spemannstr. 38 D-72076 Tübingen, Germany mof@tuebingen.mpg.de
Robust cross-directional control of paper making machines with saturating actuators
 Robust cross-directional control of paper making machines with saturating actuators J. A. G. Akkermans, A. G. Wills and W. P. Heath March 2, 2004 1 Introduction Preface Technical Report EE03044 In this
Robust cross-directional control of paper making machines with saturating actuators J. A. G. Akkermans, A. G. Wills and W. P. Heath March 2, 2004 1 Introduction Preface Technical Report EE03044 In this
Advances in Output Feedback Control of Transient Energy Growth in a Linearized Channel Flow
 AIAA SciTech Forum 7-11 January 219, San Diego, California AIAA Scitech 219 Forum 1.2514/6.219-882 Advances in Output Feedback Control of Transient Energy Growth in a Linearized Channel Flow Huaijin Yao
AIAA SciTech Forum 7-11 January 219, San Diego, California AIAA Scitech 219 Forum 1.2514/6.219-882 Advances in Output Feedback Control of Transient Energy Growth in a Linearized Channel Flow Huaijin Yao
PCA and admixture models
 PCA and admixture models CM226: Machine Learning for Bioinformatics. Fall 2016 Sriram Sankararaman Acknowledgments: Fei Sha, Ameet Talwalkar, Alkes Price PCA and admixture models 1 / 57 Announcements HW1
PCA and admixture models CM226: Machine Learning for Bioinformatics. Fall 2016 Sriram Sankararaman Acknowledgments: Fei Sha, Ameet Talwalkar, Alkes Price PCA and admixture models 1 / 57 Announcements HW1
Miscellaneous. Regarding reading materials. Again, ask questions (if you have) and ask them earlier
 and ask them earlier") Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
CS168: The Modern Algorithmic Toolbox Lecture #7: Understanding Principal Component Analysis (PCA)
") CS68: The Modern Algorithmic Toolbox Lecture #7: Understanding Principal Component Analysis (PCA) Tim Roughgarden & Gregory Valiant April 0, 05 Introduction. Lecture Goal Principal components analysis
CS68: The Modern Algorithmic Toolbox Lecture #7: Understanding Principal Component Analysis (PCA) Tim Roughgarden & Gregory Valiant April 0, 05 Introduction. Lecture Goal Principal components analysis
ENGR352 Problem Set 02
 engr352/engr352p02 September 13, 2018) ENGR352 Problem Set 02 Transfer function of an estimator 1. Using Eq. (1.1.4-27) from the text, find the correct value of r ss (the result given in the text is incorrect).
engr352/engr352p02 September 13, 2018) ENGR352 Problem Set 02 Transfer function of an estimator 1. Using Eq. (1.1.4-27) from the text, find the correct value of r ss (the result given in the text is incorrect).
Contents lecture 5. Automatic Control III. Summary of lecture 4 (II/II) Summary of lecture 4 (I/II) u y F r. Lecture 5 H 2 and H loop shaping
 Summary of lecture 4 (I/II) u y F r. Lecture 5 H 2 and H loop shaping") Contents lecture 5 Automatic Control III Lecture 5 H 2 and H loop shaping Thomas Schön Division of Systems and Control Department of Information Technology Uppsala University. Email: thomas.schon@it.uu.se,
Contents lecture 5 Automatic Control III Lecture 5 H 2 and H loop shaping Thomas Schön Division of Systems and Control Department of Information Technology Uppsala University. Email: thomas.schon@it.uu.se,
ROBUST BLIND CALIBRATION VIA TOTAL LEAST SQUARES
 ROBUST BLIND CALIBRATION VIA TOTAL LEAST SQUARES John Lipor Laura Balzano University of Michigan, Ann Arbor Department of Electrical and Computer Engineering {lipor,girasole}@umich.edu ABSTRACT This paper
ROBUST BLIND CALIBRATION VIA TOTAL LEAST SQUARES John Lipor Laura Balzano University of Michigan, Ann Arbor Department of Electrical and Computer Engineering {lipor,girasole}@umich.edu ABSTRACT This paper
Control of MIMO processes. 1. Introduction. Control of MIMO processes. Control of Multiple-Input, Multiple Output (MIMO) Processes
 Processes") Control of MIMO processes Control of Multiple-Input, Multiple Output (MIMO) Processes Statistical Process Control Feedforward and ratio control Cascade control Split range and selective control Control
Control of MIMO processes Control of Multiple-Input, Multiple Output (MIMO) Processes Statistical Process Control Feedforward and ratio control Cascade control Split range and selective control Control
Nonlinear Optimization
 Nonlinear Optimization (Com S 477/577 Notes) Yan-Bin Jia Nov 7, 2017 1 Introduction Given a single function f that depends on one or more independent variable, we want to find the values of those variables
Nonlinear Optimization (Com S 477/577 Notes) Yan-Bin Jia Nov 7, 2017 1 Introduction Given a single function f that depends on one or more independent variable, we want to find the values of those variables
Numerical atmospheric turbulence models and LQG control for adaptive optics system
 Numerical atmospheric turbulence models and LQG control for adaptive optics system Jean-Pierre FOLCHER, Marcel CARBILLET UMR6525 H. Fizeau, Université de Nice Sophia-Antipolis/CNRS/Observatoire de la Côte
Numerical atmospheric turbulence models and LQG control for adaptive optics system Jean-Pierre FOLCHER, Marcel CARBILLET UMR6525 H. Fizeau, Université de Nice Sophia-Antipolis/CNRS/Observatoire de la Côte
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
3 Gramians and Balanced Realizations
 3 Gramians and Balanced Realizations In this lecture, we use an optimization approach to find suitable realizations for truncation and singular perturbation of G. It turns out that the recommended realizations
3 Gramians and Balanced Realizations In this lecture, we use an optimization approach to find suitable realizations for truncation and singular perturbation of G. It turns out that the recommended realizations
Singular Value Decomposition
 Singular Value Decomposition (Com S 477/577 Notes Yan-Bin Jia Sep, 7 Introduction Now comes a highlight of linear algebra. Any real m n matrix can be factored as A = UΣV T where U is an m m orthogonal
Singular Value Decomposition (Com S 477/577 Notes Yan-Bin Jia Sep, 7 Introduction Now comes a highlight of linear algebra. Any real m n matrix can be factored as A = UΣV T where U is an m m orthogonal
Control System Design
 ELEC4410 Control System Design Lecture 19: Feedback from Estimated States and Discrete-Time Control Design Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science
ELEC4410 Control System Design Lecture 19: Feedback from Estimated States and Discrete-Time Control Design Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science
Lecture 6 Positive Definite Matrices
 Linear Algebra Lecture 6 Positive Definite Matrices Prof. Chun-Hung Liu Dept. of Electrical and Computer Engineering National Chiao Tung University Spring 2017 2017/6/8 Lecture 6: Positive Definite Matrices
Linear Algebra Lecture 6 Positive Definite Matrices Prof. Chun-Hung Liu Dept. of Electrical and Computer Engineering National Chiao Tung University Spring 2017 2017/6/8 Lecture 6: Positive Definite Matrices
1 Last time: least-squares problems
 MATH Linear algebra (Fall 07) Lecture Last time: least-squares problems Definition. If A is an m n matrix and b R m, then a least-squares solution to the linear system Ax = b is a vector x R n such that
MATH Linear algebra (Fall 07) Lecture Last time: least-squares problems Definition. If A is an m n matrix and b R m, then a least-squares solution to the linear system Ax = b is a vector x R n such that
5. Random Vectors. probabilities. characteristic function. cross correlation, cross covariance. Gaussian random vectors. functions of random vectors
 EE401 (Semester 1) 5. Random Vectors Jitkomut Songsiri probabilities characteristic function cross correlation, cross covariance Gaussian random vectors functions of random vectors 5-1 Random vectors we
EE401 (Semester 1) 5. Random Vectors Jitkomut Songsiri probabilities characteristic function cross correlation, cross covariance Gaussian random vectors functions of random vectors 5-1 Random vectors we
THE SINGULAR VALUE DECOMPOSITION MARKUS GRASMAIR
 THE SINGULAR VALUE DECOMPOSITION MARKUS GRASMAIR 1. Definition Existence Theorem 1. Assume that A R m n. Then there exist orthogonal matrices U R m m V R n n, values σ 1 σ 2... σ p 0 with p = min{m, n},
THE SINGULAR VALUE DECOMPOSITION MARKUS GRASMAIR 1. Definition Existence Theorem 1. Assume that A R m n. Then there exist orthogonal matrices U R m m V R n n, values σ 1 σ 2... σ p 0 with p = min{m, n},
Problem set 5: SVD, Orthogonal projections, etc.
 Problem set 5: SVD, Orthogonal projections, etc. February 21, 2017 1 SVD 1. Work out again the SVD theorem done in the class: If A is a real m n matrix then here exist orthogonal matrices such that where
Problem set 5: SVD, Orthogonal projections, etc. February 21, 2017 1 SVD 1. Work out again the SVD theorem done in the class: If A is a real m n matrix then here exist orthogonal matrices such that where
Review of some mathematical tools
 MATHEMATICAL FOUNDATIONS OF SIGNAL PROCESSING Fall 2016 Benjamín Béjar Haro, Mihailo Kolundžija, Reza Parhizkar, Adam Scholefield Teaching assistants: Golnoosh Elhami, Hanjie Pan Review of some mathematical
MATHEMATICAL FOUNDATIONS OF SIGNAL PROCESSING Fall 2016 Benjamín Béjar Haro, Mihailo Kolundžija, Reza Parhizkar, Adam Scholefield Teaching assistants: Golnoosh Elhami, Hanjie Pan Review of some mathematical
Preface. Figures Figures appearing in the text were prepared using MATLAB R. For product information, please contact:
 Linear algebra forms the basis for much of modern mathematics theoretical, applied, and computational. The purpose of this book is to provide a broad and solid foundation for the study of advanced mathematics.
Linear algebra forms the basis for much of modern mathematics theoretical, applied, and computational. The purpose of this book is to provide a broad and solid foundation for the study of advanced mathematics.
Lecture 4.3 Estimating homographies from feature correspondences. Thomas Opsahl
 Lecture 4.3 Estimating homographies from feature correspondences Thomas Opsahl Homographies induced by central projection 1 H 2 1 H 2 u uu 2 3 1 Homography Hu = u H = h 1 h 2 h 3 h 4 h 5 h 6 h 7 h 8 h
Lecture 4.3 Estimating homographies from feature correspondences Thomas Opsahl Homographies induced by central projection 1 H 2 1 H 2 u uu 2 3 1 Homography Hu = u H = h 1 h 2 h 3 h 4 h 5 h 6 h 7 h 8 h
Least Squares Optimization
 Least Squares Optimization The following is a brief review of least squares optimization and constrained optimization techniques. Broadly, these techniques can be used in data analysis and visualization
Least Squares Optimization The following is a brief review of least squares optimization and constrained optimization techniques. Broadly, these techniques can be used in data analysis and visualization
Performance assessment of MIMO systems under partial information
 Performance assessment of MIMO systems under partial information H Xia P Majecki A Ordys M Grimble Abstract Minimum variance (MV) can characterize the most fundamental performance limitation of a system,
Performance assessment of MIMO systems under partial information H Xia P Majecki A Ordys M Grimble Abstract Minimum variance (MV) can characterize the most fundamental performance limitation of a system,
Lecture 3: Review of Linear Algebra
 ECE 83 Fall 2 Statistical Signal Processing instructor: R Nowak Lecture 3: Review of Linear Algebra Very often in this course we will represent signals as vectors and operators (eg, filters, transforms,
ECE 83 Fall 2 Statistical Signal Processing instructor: R Nowak Lecture 3: Review of Linear Algebra Very often in this course we will represent signals as vectors and operators (eg, filters, transforms,
B553 Lecture 5: Matrix Algebra Review
 B553 Lecture 5: Matrix Algebra Review Kris Hauser January 19, 2012 We have seen in prior lectures how vectors represent points in R n and gradients of functions. Matrices represent linear transformations
B553 Lecture 5: Matrix Algebra Review Kris Hauser January 19, 2012 We have seen in prior lectures how vectors represent points in R n and gradients of functions. Matrices represent linear transformations
Lecture 3: Review of Linear Algebra
 ECE 83 Fall 2 Statistical Signal Processing instructor: R Nowak, scribe: R Nowak Lecture 3: Review of Linear Algebra Very often in this course we will represent signals as vectors and operators (eg, filters,
ECE 83 Fall 2 Statistical Signal Processing instructor: R Nowak, scribe: R Nowak Lecture 3: Review of Linear Algebra Very often in this course we will represent signals as vectors and operators (eg, filters,
Riccati difference equations to non linear extended Kalman filter constraints
 International Journal of Scientific & Engineering Research Volume 3, Issue 12, December-2012 1 Riccati difference equations to non linear extended Kalman filter constraints Abstract Elizabeth.S 1 & Jothilakshmi.R
International Journal of Scientific & Engineering Research Volume 3, Issue 12, December-2012 1 Riccati difference equations to non linear extended Kalman filter constraints Abstract Elizabeth.S 1 & Jothilakshmi.R
Kalman Filter Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Polynomial Chaos and Karhunen-Loeve Expansion
 Polynomial Chaos and Karhunen-Loeve Expansion 1) Random Variables Consider a system that is modeled by R = M(x, t, X) where X is a random variable. We are interested in determining the probability of the
Polynomial Chaos and Karhunen-Loeve Expansion 1) Random Variables Consider a system that is modeled by R = M(x, t, X) where X is a random variable. We are interested in determining the probability of the
Efficient robust optimization for robust control with constraints Paul Goulart, Eric Kerrigan and Danny Ralph
 Efficient robust optimization for robust control with constraints p. 1 Efficient robust optimization for robust control with constraints Paul Goulart, Eric Kerrigan and Danny Ralph Efficient robust optimization
Efficient robust optimization for robust control with constraints p. 1 Efficient robust optimization for robust control with constraints Paul Goulart, Eric Kerrigan and Danny Ralph Efficient robust optimization
Introduction to Constrained Estimation
 Introduction to Constrained Estimation Graham C. Goodwin September 2004 2.1 Background Constraints are also often present in estimation problems. A classical example of a constrained estimation problem
Introduction to Constrained Estimation Graham C. Goodwin September 2004 2.1 Background Constraints are also often present in estimation problems. A classical example of a constrained estimation problem
Frequentist-Bayesian Model Comparisons: A Simple Example
 Frequentist-Bayesian Model Comparisons: A Simple Example Consider data that consist of a signal y with additive noise: Data vector (N elements): D = y + n The additive noise n has zero mean and diagonal
Frequentist-Bayesian Model Comparisons: A Simple Example Consider data that consist of a signal y with additive noise: Data vector (N elements): D = y + n The additive noise n has zero mean and diagonal
A6523 Modeling, Inference, and Mining Jim Cordes, Cornell University
 A6523 Modeling, Inference, and Mining Jim Cordes, Cornell University Lecture 19 Modeling Topics plan: Modeling (linear/non- linear least squares) Bayesian inference Bayesian approaches to spectral esbmabon;
A6523 Modeling, Inference, and Mining Jim Cordes, Cornell University Lecture 19 Modeling Topics plan: Modeling (linear/non- linear least squares) Bayesian inference Bayesian approaches to spectral esbmabon;
EEE582 Homework Problems
 EEE582 Homework Problems HW. Write a state-space realization of the linearized model for the cruise control system around speeds v = 4 (Section.3, http://tsakalis.faculty.asu.edu/notes/models.pdf). Use
EEE582 Homework Problems HW. Write a state-space realization of the linearized model for the cruise control system around speeds v = 4 (Section.3, http://tsakalis.faculty.asu.edu/notes/models.pdf). Use
EECS 275 Matrix Computation
 EECS 275 Matrix Computation Ming-Hsuan Yang Electrical Engineering and Computer Science University of California at Merced Merced, CA 95344 http://faculty.ucmerced.edu/mhyang Lecture 6 1 / 22 Overview
EECS 275 Matrix Computation Ming-Hsuan Yang Electrical Engineering and Computer Science University of California at Merced Merced, CA 95344 http://faculty.ucmerced.edu/mhyang Lecture 6 1 / 22 Overview
Optimal control and estimation
 Automatic Control 2 Optimal control and estimation Prof. Alberto Bemporad University of Trento Academic year 2010-2011 Prof. Alberto Bemporad (University of Trento) Automatic Control 2 Academic year 2010-2011
Automatic Control 2 Optimal control and estimation Prof. Alberto Bemporad University of Trento Academic year 2010-2011 Prof. Alberto Bemporad (University of Trento) Automatic Control 2 Academic year 2010-2011
Concentration Ellipsoids
 Concentration Ellipsoids ECE275A Lecture Supplement Fall 2008 Kenneth Kreutz Delgado Electrical and Computer Engineering Jacobs School of Engineering University of California, San Diego VERSION LSECE275CE
Concentration Ellipsoids ECE275A Lecture Supplement Fall 2008 Kenneth Kreutz Delgado Electrical and Computer Engineering Jacobs School of Engineering University of California, San Diego VERSION LSECE275CE
Networked Sensing, Estimation and Control Systems
 Networked Sensing, Estimation and Control Systems Vijay Gupta University of Notre Dame Richard M. Murray California Institute of echnology Ling Shi Hong Kong University of Science and echnology Bruno Sinopoli
Networked Sensing, Estimation and Control Systems Vijay Gupta University of Notre Dame Richard M. Murray California Institute of echnology Ling Shi Hong Kong University of Science and echnology Bruno Sinopoli