EE-559 Deep learning 10. Generative Adversarial Networks
|
|
|
- Griffin Rice
- 5 years ago
- Views:
Transcription
1 EE-559 Deep learning 10. Generative Adversarial Networks François Fleuret [version of: May 17, 2018] ÉCOLE POLYTECHNIQUE FÉDÉRALE DE LAUSANNE
2 Adversarial generative models François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 2 / 84
3 A different approach to learn high-dimension generative models are the Generative Adversarial Networks proposed by Goodfellow et al. (2014). François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 3 / 84
4 A different approach to learn high-dimension generative models are the Generative Adversarial Networks proposed by Goodfellow et al. (2014). The idea behind GANs is to train two networks jointly: A generator G to map a Z following a [simple] fixed distribution to the desired real distribution, and a discriminator D to classify data points as real or fake (i.e. from G). François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 3 / 84
5 A different approach to learn high-dimension generative models are the Generative Adversarial Networks proposed by Goodfellow et al. (2014). The idea behind GANs is to train two networks jointly: A generator G to map a Z following a [simple] fixed distribution to the desired real distribution, and a discriminator D to classify data points as real or fake (i.e. from G). The approach is adversarial since the two networks have antagonistic objectives. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 3 / 84
6 A bit more formally, let X be the signal space and D the latent space dimension. The generator G : R D X is trained so that [ideally] if it gets a random normal-distributed Z as input, it produces a sample following the data distribution as output. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 4 / 84
7 A bit more formally, let X be the signal space and D the latent space dimension. The generator G : R D X is trained so that [ideally] if it gets a random normal-distributed Z as input, it produces a sample following the data distribution as output. The discriminator D : X [0, 1] is trained so that if it gets a sample as input, it predicts if it is genuine. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 4 / 84
8 If G is fixed, to train D given a set of real points we can generate x n µ, n = 1,..., N, z n N(0, I ), n = 1,..., N, build a two-class data-set { } D = (x 1, 1),..., (x N, 1), (G(z 1 ), 0),..., (G(z N ), 0), }{{}}{{} real samples µ fake samples µ G François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 5 / 84
9 If G is fixed, to train D given a set of real points we can generate x n µ, n = 1,..., N, z n N(0, I ), n = 1,..., N, build a two-class data-set { } D = (x 1, 1),..., (x N, 1), (G(z 1 ), 0),..., (G(z N ), 0), }{{}}{{} real samples µ fake samples µ G and minimize the binary cross-entropy ( L(D) = 1 N log D(x n) + 2N n=1 = 1 [ (ÊX µ log D(X ) 2 ) N log(1 D(G(z n))) n=1 ] [ + Ê X µg ]) log(1 D(X )), where µ is the true distribution of the data, and µ G is the distribution of G(Z) with Z N(0, I ). François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 5 / 84
10 The situation is slightly more complicated since we also want to optimize G to maximize D s loss. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 6 / 84
11 The situation is slightly more complicated since we also want to optimize G to maximize D s loss. Goodfellow et al. (2014) provide an analysis of the resulting equilibrium of that strategy. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 6 / 84
12 Let s define V (D, G) = E X µ [ log D(X ) ] + E X µg [ ] log(1 D(X )) which is high if D is doing a good job (low cross entropy), and low if G fools D. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 7 / 84
13 Let s define V (D, G) = E X µ [ log D(X ) ] + E X µg [ ] log(1 D(X )) which is high if D is doing a good job (low cross entropy), and low if G fools D. Our ultimate goal is a G that fools any D, so G = argmin G max V (D, G). D François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 7 / 84
14 Let s define V (D, G) = E X µ [ log D(X ) ] + E X µg [ ] log(1 D(X )) which is high if D is doing a good job (low cross entropy), and low if G fools D. Our ultimate goal is a G that fools any D, so G = argmin G max V (D, G). D If we define the optimal discriminator for a given generator D G = argmax V (D, G), D our objective becomes G = argmin V (D G, G). G François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 7 / 84
15 We have [ ] [ ] V (D, G) = E X µ log D(X ) + E X µg log(1 D(X )) = µ(x) log D(x) + µ G (x) log(1 D(x))dx. x François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 8 / 84
16 We have Since and [ ] [ ] V (D, G) = E X µ log D(X ) + E X µg log(1 D(X )) = µ(x) log D(x) + µ G (x) log(1 D(x))dx. x argmax d µ(x) log d + µ G (x) log(1 d) = D G = argmax V (D, G), D if there is no regularization on D, we get x, D G (x) = µ(x) µ(x) + µ G (x). µ(x) µ(x) + µ G (x), François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 8 / 84
17 So, since we get V (D G, G) = E X µ [ x, D G (x) = µ(x) µ(x) + µ G (x). log D G (X ) ] + E X µg [ log(1 D G (X )) ] µ(x ) = E X µ [log µ(x ) + µ G (X ) = D KL (µ µ + µ G 2 ] + E X µg [ log ) + D KL ( µ G µ + µ G 2 ] µ G (X ) µ(x ) + µ G (X ) ) log 4 François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 9 / 84
18 So, since we get V (D G, G) = E X µ [ x, D G (x) = µ(x) µ(x) + µ G (x). log D G (X ) ] + E X µg [ log(1 D G (X )) ] µ(x ) = E X µ [log µ(x ) + µ G (X ) = D KL (µ µ + µ G 2 = 2 D JS (µ, µ G ) log 4 ] + E X µg [ log ) + D KL ( µ G µ + µ G 2 ] µ G (X ) µ(x ) + µ G (X ) ) log 4 where D JS is the Jensen Shannon Divergence, a standard dissimilarity measure between distributions. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 9 / 84
19 To recap: if there is no capacity limitation for D, and if we define [ ] [ ] V (D, G) = E X µ log D(X ) + E X µg log(1 D(X )), computing amounts to compute G = argmin G max V (D, G) D G = argmin D JS (µ, µ G ), G where D JS is a reasonable dissimilarity measure between distributions. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 10 / 84
20 To recap: if there is no capacity limitation for D, and if we define [ ] [ ] V (D, G) = E X µ log D(X ) + E X µg log(1 D(X )), computing amounts to compute G = argmin G max V (D, G) D G = argmin D JS (µ, µ G ), G where D JS is a reasonable dissimilarity measure between distributions. Although this derivation provides a nice formal framework, in practice D is not fully optimized to [come close to] D G when optimizing G. In our minimal example, we alternate gradient steps to improve G and D. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 10 / 84
21 z_dim, nb_hidden = 8, 100 model_g = nn. Sequential (nn. Linear ( z_dim, nb_hidden ), nn. ReLU (), nn. Linear ( nb_hidden, 2)) model_d = nn. Sequential (nn. Linear (2, nb_hidden ), nn. ReLU (), nn. Linear ( nb_hidden, 1), nn. Sigmoid ()) François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 11 / 84
22 z_dim, nb_hidden = 8, 100 model_g = nn. Sequential (nn. Linear ( z_dim, nb_hidden ), nn. ReLU (), nn. Linear ( nb_hidden, 2)) model_d = nn. Sequential (nn. Linear (2, nb_hidden ), nn. ReLU (), nn. Linear ( nb_hidden, 1), nn. Sigmoid ()) batch_size, lr = 10, 1e -3 optimizer_g = optim. Adam ( model_g. parameters (), lr = lr) optimizer_d = optim. Adam ( model_d. parameters (), lr = lr) for e in range ( nb_epochs ): for t, real_batch in enumerate ( real_samples. split ( batch_size )): z = Variable ( real_batch. new ( real_batch. size (0), z_dim ). normal_ ()) fake_batch = model_g (z) real_batch = Variable ( real_batch ) D_scores_on_fake = model_d ( fake_batch ) D_scores_on_real = model_d ( real_batch ) if t%2 == 0: loss = (1 - D_scores_on_fake ). log (). mean () optimizer_g. zero_grad () loss. backward () optimizer_g. step () else : loss = - ( D_scores_on_real. log (). mean () + (1 - D_scores_on_fake ). log (). mean ()) optimizer_d. zero_grad () loss. backward () optimizer_d. step () François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 11 / 84
23 D = 2 4 Real Synth François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 12 / 84
24 D = 8 4 Real Synth François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 12 / 84
25 D = 32 4 Real Synth François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 12 / 84
26 D = 2 4 Real Synth François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 12 / 84
27 D = 8 4 Real Synth François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 12 / 84
28 D = 32 4 Real Synth François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 12 / 84
29 D = 2 4 Real Synth François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 12 / 84
30 D = 8 4 Real Synth François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 12 / 84
31 D = 32 4 Real Synth François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 12 / 84
32 D = 2 4 Real Synth François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 12 / 84
33 D = 8 4 Real Synth François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 12 / 84
34 D = 32 4 Real Synth François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 12 / 84
35 D = 2 4 Real Synth François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 12 / 84
36 D = 8 4 Real Synth François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 12 / 84
37 D = 32 4 Real Synth François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 12 / 84
38 In more realistic settings, the fake samples may be initially so unrealistic that the response of D saturates. That causes the loss for G [ ] Ê X µg log(1 D(X )) to be far in the exponential tail of D s sigmoid, and have zero gradient since log(1 + ɛ) ɛ does not correct it in any way. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 13 / 84
39 In more realistic settings, the fake samples may be initially so unrealistic that the response of D saturates. That causes the loss for G [ ] Ê X µg log(1 D(X )) to be far in the exponential tail of D s sigmoid, and have zero gradient since log(1 + ɛ) ɛ does not correct it in any way. Goodfellow et al. suggest to replace this term with a non-saturating cost [ ] Ê X µg log(d(x )) so that the log fixes D s exponential behavior. The resulting optimization problem has the same optima as the original one. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 13 / 84
40 In more realistic settings, the fake samples may be initially so unrealistic that the response of D saturates. That causes the loss for G [ ] Ê X µg log(1 D(X )) to be far in the exponential tail of D s sigmoid, and have zero gradient since log(1 + ɛ) ɛ does not correct it in any way. Goodfellow et al. suggest to replace this term with a non-saturating cost [ ] Ê X µg log(d(x )) so that the log fixes D s exponential behavior. The resulting optimization problem has the same optima as the original one. The loss for D remains unchanged. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 13 / 84



 MNIST b) TFD c) CIFAR-10 (fully connected model) d) CIFAR-10 (convolutional discriminator and")
41 potential of the adversarial framework. a) b) c) d) Figure 2: Visualization of samples from the model. Rightmost column shows the nearest training example of the neighboring sample, in order to demonstrate that the model has not memorized the training set. Samples are fair random draws, not cherry-picked. Unlike most other visualizations of deep generative models, these images show actual samples from the model distributions, not conditional means given samples of hidden units. Moreover, these samples are uncorrelated because the sampling process does not depend on Markov chain mixing. a) MNIST b) TFD c) CIFAR-10 (fully connected model) d) CIFAR-10 (convolutional discriminator and deconvolutional generator) (Goodfellow et al., 2014) François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 14 / 84
42 Training a standard GAN often results in two pathological behaviors: Oscillations without convergence. Contrary to standard loss minimization, we have no guarantee here that it will actually decrease. The infamous mode collapse, when G models very well a small sub-population, concentrating on a few modes. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 15 / 84
43 Training a standard GAN often results in two pathological behaviors: Oscillations without convergence. Contrary to standard loss minimization, we have no guarantee here that it will actually decrease. The infamous mode collapse, when G models very well a small sub-population, concentrating on a few modes. Additionally, performance is hard to assess and often boils down to a beauty contest. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 15 / 84
44 Deep Convolutional GAN François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 16 / 84
45 We also encountered difficulties attempting to scale GANs using CNN architectures commonly used in the supervised literature. However, after extensive model exploration we identified a family of architectures that resulted in stable training across a range of datasets and allowed for training higher resolution and deeper generative models. (Radford et al., 2015) François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 17 / 84
46 Radford et al. converged to the following rules: Replace pooling layers with strided convolutions in D and strided transposed convolutions in G, use batchnorm in both D and G, remove fully connected hidden layers, use ReLU in G except for the output, which uses Tanh, use LeakyReLU activation in D for all layers. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 18 / 84

47 Under review as a conference paper at ICLR 2016 Figure 1: DCGAN generator used for LSUN scene modeling. A 100 dimensional uniform distribution Z is projected to a small spatial extent convolutional representation with many feature maps. A series of four fractionally-strided convolutions (in some recent papers, these are wrongly called deconvolutions) then convert this high level representation into a pixel image. Notably, no fully connected or pooling layers are used. suggested value of 0.9 resulted in training oscillation and instability while(radford reducing it to et0.5 al., helped 2015) stabilize training. 4.1 LSUN François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 19 / 84
48 We can have a look at the reference implementation provided in François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 20 / 84
49 We can have a look at the reference implementation provided in # default nz = 100, ngf = 64 class _netg (nn. Module ): def init (self, ngpu ): super ( _netg, self ). init () self. ngpu = ngpu self. main = nn. Sequential ( # input is Z, going into a convolution nn. ConvTranspose2d (nz, ngf * 8, 4, 1, 0, bias = False ), nn. BatchNorm2d ( ngf * 8), nn. ReLU ( True ), # state size. ( ngf * 8) x 4 x 4 nn. ConvTranspose2d ( ngf * 8, ngf * 4, 4, 2, 1, bias = False ), nn. BatchNorm2d ( ngf * 4), nn. ReLU ( True ), # state size. ( ngf * 4) x 8 x 8 nn. ConvTranspose2d ( ngf * 4, ngf * 2, 4, 2, 1, bias = False ), nn. BatchNorm2d ( ngf * 2), nn. ReLU ( True ), # state size. ( ngf * 2) x 16 x 16 nn. ConvTranspose2d ( ngf * 2, ngf, 4, 2, 1, bias = False ), nn. BatchNorm2d ( ngf ), nn. ReLU ( True ), # state size. ( ngf ) x 32 x 32 nn. ConvTranspose2d ( ngf, nc, 4, 2, 1, bias = False ), nn. Tanh () # state size. (nc) x 64 x 64 ) François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 20 / 84
50 # default nz = 100, ndf = 64 class _netd (nn. Module ): def init (self, ngpu ): super ( _netd, self ). init () self. ngpu = ngpu self. main = nn. Sequential ( # input is (nc) x 64 x 64 nn. Conv2d (nc, ndf, 4, 2, 1, bias = False ), nn. LeakyReLU (0.2, inplace = True ), # state size. ( ndf ) x 32 x 32 nn. Conv2d (ndf, ndf * 2, 4, 2, 1, bias = False ), nn. BatchNorm2d ( ndf * 2), nn. LeakyReLU (0.2, inplace = True ), # state size. ( ndf * 2) x 16 x 16 nn. Conv2d ( ndf * 2, ndf * 4, 4, 2, 1, bias = False ), nn. BatchNorm2d ( ndf * 4), nn. LeakyReLU (0.2, inplace = True ), # state size. ( ndf * 4) x 8 x 8 nn. Conv2d ( ndf * 4, ndf * 8, 4, 2, 1, bias = False ), nn. BatchNorm2d ( ndf * 8), nn. LeakyReLU (0.2, inplace = True ), # state size. ( ndf *8) x 4 x 4 nn. Conv2d ( ndf * 8, 1, 4, 1, 0, bias = False ), nn. Sigmoid () ) François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 21 / 84
51 # custom weights initialization called on netg and netd def weights_init (m): classname = m. class. name if classname. find ( Conv )!= -1: m.weight.data.normal_ (0.0, 0.02) elif classname. find ( BatchNorm )!= -1: m.weight.data.normal_ (1.0, 0.02) m.bias.data.fill_ (0) François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 22 / 84
52 # custom weights initialization called on netg and netd def weights_init (m): classname = m. class. name if classname. find ( Conv )!= -1: m.weight.data.normal_ (0.0, 0.02) elif classname. find ( BatchNorm )!= -1: m.weight.data.normal_ (1.0, 0.02) m.bias.data.fill_ (0) criterion = nn. BCELoss () input = torch. FloatTensor ( opt. batchsize, 3, opt. imagesize, opt. imagesize ) noise = torch. FloatTensor ( opt. batchsize, nz, 1, 1) fixed_noise = torch. FloatTensor ( opt. batchsize, nz, 1, 1). normal_ (0, 1) label = torch. FloatTensor ( opt. batchsize ) real_label = 1 fake_label = 0 fixed_noise = Variable ( fixed_noise ) # setup optimizer optimizerd = optim. Adam ( netd. parameters (), lr=opt.lr, betas=( opt. beta1, 0.999) ) optimizerg = optim. Adam ( netg. parameters (), lr=opt.lr, betas=( opt. beta1, 0.999) ) for epoch in range ( opt. niter ): for i, data in enumerate ( dataloader, 0): François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 22 / 84
53 # (1) Update D network : maximize log (D(x)) + log (1 - D(G(z))) # train with real netd. zero_grad () real_cpu, _ = data batch_size = real_cpu. size (0) if opt. cuda : real_cpu = real_cpu. cuda () input. resize_as_ ( real_cpu ). copy_ ( real_cpu ) label. resize_ ( batch_size ). fill_ ( real_label ) inputv = Variable ( input ) labelv = Variable ( label ) output = netd ( inputv ) errd_real = criterion ( output, labelv ) errd_real. backward () D_x = output. data. mean () # train with fake noise. resize_ ( batch_size, nz, 1, 1). normal_ (0, 1) noisev = Variable ( noise ) fake = netg ( noisev ) labelv = Variable ( label. fill_ ( fake_label )) output = netd ( fake. detach ()) errd_fake = criterion ( output, labelv ) errd_fake. backward () D_G_z1 = output. data. mean () errd = errd_real + errd_fake optimizerd. step () François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 23 / 84
54 # (2) Update G network : maximize log (D(G(z))) netg. zero_grad () # fake labels are real for generator cost labelv = Variable ( label. fill_ ( real_label )) output = netd ( fake ) errg = criterion ( output, labelv ) errg. backward () D_G_z2 = output. data. mean () optimizerg. step () This update of G minimizes the loss with inverted labels instead of maximizing it for the correct ones, and hence implements the non-saturating loss. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 24 / 84

55 Real images from LSUN s bedroom class. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 25 / 84

56 Fake images after 1 epoch (3M images) François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 26 / 84

57 Fake images after 2 epochs François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 27 / 84

58 Fake images after 5 epochs François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 28 / 84

59 Fake images after 10 epochs François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 29 / 84

60 Fake images after 20 epochs François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 30 / 84
61 Wasserstein GAN François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 31 / 84
62 Arjovsky et al. (2017) point out that D JS does not account [much] for the metric structure of the space. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 32 / 84
63 Arjovsky et al. (2017) point out that D JS does not account [much] for the metric structure of the space. δ 1 2δ µ 1 2 x µ 1 François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 32 / 84
64 Arjovsky et al. (2017) point out that D JS does not account [much] for the metric structure of the space. δ 1 2δ µ 1 2 x µ 1 ( ( 1 D JS (µ, µ ) = min(δ, x ) δ log ) ( ) ( log )) 2δ δ δ Hence all x greater than δ are seen the same. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 32 / 84
65 An alternative choice is the earth moving distance, which intuitively is the minimum mass displacement to transform one distribution into the other. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 33 / 84
66 An alternative choice is the earth moving distance, which intuitively is the minimum mass displacement to transform one distribution into the other François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 33 / 84
67 An alternative choice is the earth moving distance, which intuitively is the minimum mass displacement to transform one distribution into the other µ = [1,2] [3,4] [9,10] François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 33 / 84
68 An alternative choice is the earth moving distance, which intuitively is the minimum mass displacement to transform one distribution into the other µ = [1,2] [3,4] [9,10] µ = [5,7] François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 33 / 84
69 An alternative choice is the earth moving distance, which intuitively is the minimum mass displacement to transform one distribution into the other µ = [1,2] [3,4] [9,10] µ = [5,7] François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 33 / 84
70 An alternative choice is the earth moving distance, which intuitively is the minimum mass displacement to transform one distribution into the other µ = [1,2] [3,4] [9,10] µ = [5,7] W(µ, µ ) = = 3 François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 33 / 84
71 This distance is also known as the Wasserstein distance, defined as [ ] W(µ, µ ) = min X X, q Π(µ,µ ) E (X,X ) q where Π(µ, µ ) is the set of distributions over X 2 whose marginals are µ and µ. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 34 / 84
72 Intuitively, it increases monotonically with the distance between modes δ 1 2δ µ 1 2 x µ 1 W(µ, µ ) = 1 2 x François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 35 / 84
73 So it would make a lot of sense to look for a generator matching the density for this metric, that is G = argmin W(µ, µ G ). G François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 36 / 84
74 So it would make a lot of sense to look for a generator matching the density for this metric, that is G = argmin W(µ, µ G ). G Unfortunately, the definition of W does not provide an operational way of estimating it. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 36 / 84
75 A duality theorem from Kantorovich and Rubinstein implies [ ] [ ] W(µ, µ ) = max f (X ) E X µ f (X ) where is the Lipschitz seminorm. f L 1 E X µ f (x) f (x ) f L = max x,x x x François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 37 / 84
76 µ = [1,2] [3,4] [9,10] µ = [5,7] François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 38 / 84
77 3 f µ = [1,2] [3,4] [9,10] µ = [5,7] François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 38 / 84
78 3 f µ = [1,2] [3,4] [9,10] µ = [5,7] ( W(µ, µ ) = ) }{{} E X µ f (X ) ( ) = 3 2 }{{} E X µ f (X ) François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 38 / 84
79 Using this result, we are looking for a generator G = argmin W(µ, µ G ) G = argmin G max D L 1 where the max is now an optimized predictor. [ ] [ ]) (E X µ D(X ) E X µg D(X ), François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 39 / 84
80 Using this result, we are looking for a generator G = argmin W(µ, µ G ) G = argmin G max D L 1 where the max is now an optimized predictor. [ ] [ ]) (E X µ D(X ) E X µg D(X ), This is very similar to the original GAN formulation, except that the value of D is not interpreted through a log-loss, and there is a strong regularization on D. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 39 / 84
81 The main issue in this formulation is to optimize the network D under a constraint on its Lipschitz seminorm D L 1. Arjovsky et al. achieve this by clipping D s weights. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 40 / 84
82 The two main benefits observed by Arjovsky et al. are A greater stability of the learning process, both in principle and in their experiments: they do not witness mode collapse. A greater interpretability of the loss, which is a better indicator of the quality of the samples. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 41 / 84
83 Figure 2: Optimal discriminator and critic when learning to differentiate two Gaussians. As we can see, the traditional GAN discriminator saturates and results in vanishing gradients. Our WGAN critic provides very clean gradients on all parts of the space. 4 Empirical Results (Arjovsky et al., 2017) We run experiments on image generation using our Wasserstein-GAN algorithm and show that there are significant practical benefits to using it over the formulation used in standard GANs. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 42 / 84


 on which models are doing better over others.")
84 Figure 4: JS estimates for an MLP generator (upper left) and a DCGAN generator (upper right) trained with the standard GAN procedure. Both had a DCGAN discriminator. Both curves have increasing error. Samples get better for the DCGAN but the JS estimate increases or stays constant, pointing towards no significant correlation between sample quality and loss. Bottom: MLP with both generator and discriminator. The curve goes up and down regardless of sample quality. All training curves were passed through the same median filter as in Figure 3. to stare at the generated samples to figure out failure modes and to gain information (Arjovsky et al., 2017) on which models are doing better over others. However, we do not claim that this is a new method to quantitatively evaluate generative models yet. The constant scaling factor that depends on the critic s François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 43 / 84



85 Figure 3: Training curves and samples at different stages of training. We can see a clear correlation between lower error and better sample quality. Upper left: the generator is an MLP with 4 hidden layers and 512 units at each layer. The loss decreases constistently as training progresses and sample quality increases. Upper right: the generator is a standard DCGAN. The loss decreases quickly and sample quality increases as well. In both upper plots the critic is a DCGAN without the sigmoid so losses can be subjected to comparison. Lower half: both the generator and the discriminator are MLPs with substantially high learning rates (so training failed). Loss is constant and samples are constant as well. The training curves were passed through a median filter for visualization purposes. 4.2 Meaningful loss metric (Arjovsky et al., 2017) Because the WGAN algorithm attempts to train the critic f (lines 2 8 in Algo- François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 44 / 84
86 However, as Arjovsky et al. wrote: Weight clipping is a clearly terrible way to enforce a Lipschitz constraint. If the clipping parameter is large, then it can take a long time for any weights to reach their limit, thereby making it harder to train the critic till optimality. If the clipping is small, this can easily lead to vanishing gradients when the number of layers is big, or batch normalization is not used (such as in RNNs). (Arjovsky et al., 2017) François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 45 / 84
87 However, as Arjovsky et al. wrote: Weight clipping is a clearly terrible way to enforce a Lipschitz constraint. If the clipping parameter is large, then it can take a long time for any weights to reach their limit, thereby making it harder to train the critic till optimality. If the clipping is small, this can easily lead to vanishing gradients when the number of layers is big, or batch normalization is not used (such as in RNNs). (Arjovsky et al., 2017) In some way, the resulting Wasserstein GAN (WGAN) trades the difficulty to train G for the difficulty to train D. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 45 / 84
88 However, as Arjovsky et al. wrote: Weight clipping is a clearly terrible way to enforce a Lipschitz constraint. If the clipping parameter is large, then it can take a long time for any weights to reach their limit, thereby making it harder to train the critic till optimality. If the clipping is small, this can easily lead to vanishing gradients when the number of layers is big, or batch normalization is not used (such as in RNNs). (Arjovsky et al., 2017) In some way, the resulting Wasserstein GAN (WGAN) trades the difficulty to train G for the difficulty to train D. In practice, this weakness results in extremely long convergence time. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 45 / 84
89 Gulrajani et al. (2017) proposed the improved Wasserstein GAN in which the constraint on the Lipschitz seminorm is replaced with a smooth penalty term. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 46 / 84
90 Gulrajani et al. (2017) proposed the improved Wasserstein GAN in which the constraint on the Lipschitz seminorm is replaced with a smooth penalty term. They state that if [ ] [ ]) D = argmax (E X µ D(X ) E X µg D(X ) D L 1 then, with probability one under µ and µ G D (X ) = 1. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 46 / 84
91 Gulrajani et al. (2017) proposed the improved Wasserstein GAN in which the constraint on the Lipschitz seminorm is replaced with a smooth penalty term. They state that if [ ] [ ]) D = argmax (E X µ D(X ) E X µg D(X ) D L 1 then, with probability one under µ and µ G D (X ) = 1. This implies that adding a regularization that pushes the gradient norm to one should not exclude [any of] the optimal discriminator[s]. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 46 / 84
92 So instead of looking for argmax D L 1 ] [ ] E X µ [D(X ) E X µg D(X ), François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 47 / 84
93 So instead of looking for argmax D L 1 ] [ ] E X µ [D(X ) E X µg D(X ), Gulrajani et al. propose to solve ] [ ] [ argmax E X µ [D(X ] ) E X µg D(X ) λe X µp ( D(X ) 1) 2 D where µ p is the distribution of a point B sampled uniformly between a real sample X and a fake sample G(Z), that is B = UX + (1 U)X where X µ, X µ G, and U U[0, 1]. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 47 / 84
94 So instead of looking for argmax D L 1 ] [ ] E X µ [D(X ) E X µg D(X ), Gulrajani et al. propose to solve ] [ ] [ argmax E X µ [D(X ] ) E X µg D(X ) λe X µp ( D(X ) 1) 2 D where µ p is the distribution of a point B sampled uniformly between a real sample X and a fake sample G(Z), that is B = UX + (1 U)X where X µ, X µ G, and U U[0, 1]. Note that this loss involves second-order derivatives. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 47 / 84
95 So instead of looking for argmax D L 1 ] [ ] E X µ [D(X ) E X µg D(X ), Gulrajani et al. propose to solve ] [ ] [ argmax E X µ [D(X ] ) E X µg D(X ) λe X µp ( D(X ) 1) 2 D where µ p is the distribution of a point B sampled uniformly between a real sample X and a fake sample G(Z), that is B = UX + (1 U)X where X µ, X µ G, and U U[0, 1]. Note that this loss involves second-order derivatives. Experiments show that this scheme is more stable than WGAN under many different conditions. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 47 / 84
96 Conditional GAN François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 48 / 84
97 All the models we have seen so far model a density in high dimension and provide means to sample according to it, which is useful for synthesis only. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 49 / 84
98 All the models we have seen so far model a density in high dimension and provide means to sample according to it, which is useful for synthesis only. However, most of the practical applications require the ability to sample a conditional distribution. E.g.: Next frame prediction. in-painting, segmentation, style transfer. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 49 / 84
99 The Conditional GAN proposed by Mirza and Osindero (2014) consists of parameterizing both G and D by a conditioning quantity Y. [ [ ] V (D, G) = E (X,Y ) µ log D(X, Y ) ]+E Z N(0,I ),Y µy log(1 D(G(Z, Y ), Y )), François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 50 / 84
100 To generate MNIST characters, with Z U ( [0, 1] 100), and conditioned with the class y, encoded as a one-hot vector of dimension 10, they propose François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 51 / 84
101 To generate MNIST characters, with Z U ( [0, 1] 100), and conditioned with the class y, encoded as a one-hot vector of dimension 10, they propose y fc 10d 1000d fc fc x z fc 1200d 784d 100d 200d G François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 51 / 84
102 To generate MNIST characters, with Z U ( [0, 1] 100), and conditioned with the class y, encoded as a one-hot vector of dimension 10, they propose maxout 240d y fc maxout fc δ 10d 1000d fc fc x maxout 240d 1d z 100d fc 200d 1200d 784d 50d D François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 51 / 84
103 To generate MNIST characters, with Z U ( [0, 1] 100), and conditioned with the class y, encoded as a one-hot vector of dimension 10, they propose maxout 240d y fc maxout fc δ 10d 1000d fc fc x maxout 240d 1d z fc 1200d 784d 50d 100d 200d François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 51 / 84
![(See [8] for more details of how this estimate is constructed.](/docs-images/83/88571257/images/104-0.jpg ") The conditional adversarial net results that we present are comparable with some other network based, but are outperformed by several other approaches including non-conditional adversarial nets.")
104 (See [8] for more details of how this estimate is constructed.) The conditional adversarial net results that we present are comparable with some other network based, but are outperformed by several other approaches including non-conditional adversarial nets. We present these results more as a proof-of-concept than as demonstration of efficacy, and believe that with further exploration of hyper-parameter space and architecture that the conditional model should match or exceed the non-conditional results. Fig 2 shows some of the generated samples. Each row is conditioned on one label and each column is a different generated sample. Figure 2: Generated MNIST digits, each row conditioned on one label 4.2 Multimodal (Mirza and Osindero, 2014) Photo sites such as Flickr are a rich source of labeled data in the form of images and their associated user-generated metadata (UGM) in particular user-tags. 4 François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 52 / 84
105 Image-to-Image translations François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 53 / 84
106 The main issue to generate realistic signal is that the value X to predict may remain non-deterministic given the conditioning quantity Y. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 54 / 84
107 The main issue to generate realistic signal is that the value X to predict may remain non-deterministic given the conditioning quantity Y. For a loss function such as MSE, the best fit is E(X Y = y) which can be pretty different from the MAP, or from any reasonable sample from µ X Y =y. In practice for images there are often remaining location indeterminacy that results into a blurry prediction. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 54 / 84
108 The main issue to generate realistic signal is that the value X to predict may remain non-deterministic given the conditioning quantity Y. For a loss function such as MSE, the best fit is E(X Y = y) which can be pretty different from the MAP, or from any reasonable sample from µ X Y =y. In practice for images there are often remaining location indeterminacy that results into a blurry prediction. Sampling according to µ X Y =y is the proper way to address the problem. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 54 / 84
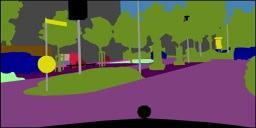
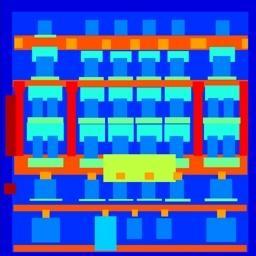
109 Isola et al. (2016) use conditional GANs to address this issue for the translation of images with pixel-to-pixel correspondence: edges to realistic photos, semantic segmentation, gray-scales to colors, etc. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 55 / 84

110 Positive examples Real or fake pair? Negative examples Real or fake pair? D D G tries to synthesize fake images that fool D G Encoder-decoder Figure 3: Two choices for the architect U-Net [34] is an encoder-decoder w tween mirrored layers in the encoder an D tries to identify the fakes Figure 2: Training a conditional GAN to predict aerial photos from maps. The discriminator, D, learns to classify between real and synthesized pairs. The generator learns to fool the discriminator. Unlike an unconditional GAN, both the generator and discriminator observe an input image. where G tries to minimize this objective against an adversarial D that tries to maximize it, i.e. G = arg min G max D L cgan (G, D). To test the importance of conditioning the discrimintor, this strategy effective the generato nore the noise which is consistent w Instead, for our final models, we pr form of dropout, applied on several at both training and test time. Despi observe very minor stochasticity in Designing conditional GANs that put, and thereby capture the full en (Isoladistributions et al., 2016) they model, is an impo by the present work Network architectures François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 56 / 84
111 They define V (D, G) = E (X,Y ) µ [ log D(Y, X ) L L 1 (G) = E (X,Y ) µ,z N(0,I ) [ Y G(Z, X ) 1 ], ] [ ] + E Z µz,x µ X log(1 D(G(Z, X ), X )), and G = argmin max V (D, G) + λl L G D 1 (G). François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 57 / 84
112 They define V (D, G) = E (X,Y ) µ [ log D(Y, X ) L L 1 (G) = E (X,Y ) µ,z N(0,I ) [ Y G(Z, X ) 1 ], ] [ ] + E Z µz,x µ X log(1 D(G(Z, X ), X )), and G = argmin max V (D, G) + λl L G D 1 (G). The term L L 1 pushes toward proper pixel-wise prediction, and V makes the generator prefer realistic images to better fitting pixel-wise. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 57 / 84
113 They define V (D, G) = E (X,Y ) µ [ log D(Y, X ) L L 1 (G) = E (X,Y ) µ,z N(0,I ) [ Y G(Z, X ) 1 ], ] [ ] + E Z µz,x µ X log(1 D(G(Z, X ), X )), and G = argmin max V (D, G) + λl L G D 1 (G). The term L L 1 pushes toward proper pixel-wise prediction, and V makes the generator prefer realistic images to better fitting pixel-wise. Note that Isola et al. switch the meaning of X and Y wrt Mirza and Osindero. Here X is the conditioning quantity and Y the signal to generate. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 57 / 84
114 For G, they start with Radford et al. (2015) s DCGAN architecture and add skip connections from layer i to layer D i that concatenate channels. Negative examples Real or fake pair? D G Encoder-decoder U-Net Figure 3: Two choices for the architecture of the generator. The U-Net [34] is an encoder-decoder with skip connections between mirrored layers in the encoder and decoder stacks. s nal GAN to predict aerial photos from, learns to classify between real and rator learns to fool the discriminator., both the generator and discrimina- (Isola et al., 2016) this strategy effective the generator simply learned to ignore the noise which is consistent with Mathieu et al. [27]. Instead, for our final models, we provide noise only in the form of dropout, applied on several layers of our generator at both training and test time. Despite the dropout noise, we observe very minor stochasticity in the output of our nets. Designing conditional GANs that produce stochastic out- François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 58 / 84

115 For G, they start with Radford et al. (2015) s DCGAN architecture and add skip connections from layer i to layer D i that concatenate channels. Negative examples Real or fake pair? D G Encoder-decoder U-Net Figure 3: Two choices for the architecture of the generator. The U-Net [34] is an encoder-decoder with skip connections between mirrored layers in the encoder and decoder stacks. s (Isola et al., 2016) this strategy effective the generator simply learned to ignore the noise which is consistent with Mathieu et al. [27]. nal GAN to predict Randomness aerial photos from Z isinstead, provided for our through final models, dropout, we provide andnoise notonly as in antheadditional input., learns to classify between real and form of dropout, applied on several layers of our generator rator learns to fool the discriminator. at both training and test time. Despite the dropout noise, we, both the generator and discriminaobserve very minor stochasticity in the output of our nets. Designing conditional GANs that produce stochastic out- François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 58 / 84
116 The discriminator D is a regular convnet which scores overlapping patches of size N N and averages the scores for the final one. This controls the network s complexity, while allowing to detect any inconsistency of the generated image (e.g. blurriness). François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 59 / 84
117 Input Ground truth L1 cgan L1 + cgan Figure 4: Different losses induce different quality of results. Each column shows results trained under a different loss. Please see for additional examples. L1 1x1 16x16 70x70 256x256 (Isola et al., 2016) Figure 6: Patch size variations. Uncertainty in the output manifests itself differently for different loss functions. Uncertain regions become blurry and desaturated under L1. The 1x1 PixelGAN encourages greater color diversity but has no effect on spatial statistics. The 16x16 François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 60 / 84






")

. put label maps.")






 line.")


118 Figure 4: Different losses induce different quality of results. Each column shows results trained under a different loss. Please see for additional examples. L1 1x1 16x16 70x70 256x256 Figure 6: Patch size variations. Uncertainty in the output manifests itself differently for different loss functions. Uncertain regions become blurry and desaturated under L1. The 1x1 PixelGAN encourages greater color diversity but has no effect on spatial statistics. The 16x16 PatchGAN creates locally sharp results, but also leads to tiling artifacts beyond the scale it can observe. The 70x70 PatchGAN forces outputs that are sharp, even if incorrect, in both the spatial and spectral (coforfulness) dimensions. The full 256x256 ImageGAN produces results that are visually similar to the 70x70 PatchGAN, but somewhat lower quality according to our FCN-score metric (Table 2). Please see for additional examples. put label maps. Combining all terms, L1+cGAN, performs similarly well. Colorfulness A striking effect of conditional GANs is that they produce sharp images, hallucinating spatial structure even where it does not exist in the input label map. One might imagine cgans have a similar effect on sharpening in the spectral dimension i.e. making images more colorful. Just as L1 will incentivize a blur when it is uncertain where exactly to locate an edge, it will also incentivize an average, grayish color when it is uncertain which of several plausible color values a pixel should take on. Specially, L1 butions over output color values in Lab color space. The ground truth distributions are (Isola shown et withal., a dotted 2016) line. It is apparent that L1 leads to a narrower distribution than the ground truth, confirming the hypothesis that L1 encourages average, grayish colors. Using a cgan, on the other hand, pushes the output distribution closer to the ground truth Analysis of the generator architecture A U-Net architecture allows low-level information to shortcut across the network. Does this lead to better results? Figure 5 compares the U-Net against an encoder-decoder on François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 61 / 84
119 Aerial photo to map Map to aerial photo input output input output Figure 8: Example results on Google Maps at 512x512 resolution (model was trained on images at 256x256 resolution, and run convolutionally on the larger images at test time). Contrast adjusted for clarity. (Isola et al., 2016) François Fleuret Input Ground truth EE-559 Deep Output learning / 10. Generative Adversarial Input Networks Ground truth Output 62 / 84































120 input output input output Figure 8: Example results on Google Maps at 512x512 resolution (model was trained on images at 256x256 resolution, and run convolutionally on the larger images at test time). Contrast adjusted for clarity. Input Ground truth Output Input Ground truth Output Figure 11: Example results of our method on Cityscapes labels photo, compared to ground truth. (Isola et al., 2016) François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 63 / 84























121 Input Ground truth Output Input Ground truth Output Figure 12: Example results of our method on facades labels photo, compared to ground truth (Isola et al., 2016) François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 64 / 84
122 Input Ground truth Output Input Ground truth Output Figure 13: Example results of our method on day night, compared to ground truth. Input Ground truth Output Input Ground (Isola truth et al., Output 2016) François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 65 / 84



















123 Figure 13: Example results of our method on day night, compared to ground truth. Input Ground truth Output Input Ground truth Output Figure 14: Example results of our method on automatically detected edges handbags, compared to ground truth. (Isola et al., 2016) François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 66 / 84








![[10]. Note](/docs-images/83/88571257/images/124-16.jpg "that the")







124 Figure 15: Example results of our method on automatically detected edges shoes, compared to ground truth. Input Output Input Output Input Output Input Output Figure 16: Example results of the edges photo models applied to human-drawn sketches from [10]. Note that the models were trained on automatically detected edges, but generalize to human drawings (Isola et al., 2016) François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 67 / 84
125 The main drawback of this technique is that it requires pairs of samples with pixel-to-pixel correspondence. In many cases, one has at its disposal examples from two densities and wants to translate a sample from the first ( images of apples ) into a sample likely under the second ( images of oranges ). François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 68 / 84
126 We consider X r.v. on X a sample from the first data-set, and Y r.v. on Y a sample for the second data-set. Zhu et al. (2017) propose to train at the same time two mappings such that G : X Y F : Y X G(X ) µ Y, G F(X ) X. Where the matching in density is characterized with a discriminator D Y and the reconstruction with the L 1 loss. They also do this both ways symmetrically. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 69 / 84
127 D X X G F D Y Y x G cycle-consistency loss D Y D X G Ŷ ˆx y ˆX ŷ F F X ( (a) (b) (c) Y X ( Y cycle-consistency loss Figure 3: (a) Our model contains two mapping functions G : X Y and F : Y X, and associated adversarial discriminators D Y and D X. D Y encourages G to translate X into outputs indistinguishable from domain Y, and vice versa for D X and F. To further regularize the mappings, we introduce two cycle consistency losses that capture the intuition that if we translate from one domain to the other and back again we should arrive at where we started: (b) forward cycle-consistency loss: x G(x) F (G(x)) x, and (c) backward cycle-consistency loss: y F (y) G(F (y)) y image cannot be distinguished from images in the target domain. Image-to-Image Translation The idea of image-toimage translation goes back at least to Hertzmann et al. s Image Analogies [18], who employ a nonparametric texture model [9] on a single input-output training image pair. More recent approaches use a dataset of input-output examples to learn a parametric translation function using CNNs, e.g. [31]. Our approach builds on the pix2pix framework tween the input and output, nor do we assume that the input and output have to lie in the same low-dimensional embedding space. This makes our method a general-purpose solu- (Zhu et al., 2017) tion for many vision and graphics tasks. We directly compare against several prior and contemporary approaches in Section 5.1. Cycle Consistency The idea of using transitivity as a way to regularize structured data has a long history. In visual tracking, enforcing simple forward-backward con- François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 70 / 84
128 The generator is from Johnson et al. (2016), an updated version of the one from Radford et al. (2015) s DCGAN. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 71 / 84
129 The generator is from Johnson et al. (2016), an updated version of the one from Radford et al. (2015) s DCGAN. The loss optimized alternatively is V (G, F, D X, D Y ) =V (G, D Y, X, Y ) + V (F, D X, Y, X ) ( [ ] [ ]) + λ E F(G(X )) X 1 + E G(F(Y )) Y 1 where V is a quadratic loss, instead of the usual log (Mao et al., 2016) [ ] [ V (G, D Y, X, Y ) = E (D Y (Y ) 1) 2 + E D Y (G(X )) 2]. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 71 / 84
130 The generator is from Johnson et al. (2016), an updated version of the one from Radford et al. (2015) s DCGAN. The loss optimized alternatively is V (G, F, D X, D Y ) =V (G, D Y, X, Y ) + V (F, D X, Y, X ) ( [ ] [ ]) + λ E F(G(X )) X 1 + E G(F(Y )) Y 1 where V is a quadratic loss, instead of the usual log (Mao et al., 2016) [ ] [ V (G, D Y, X, Y ) = E (D Y (Y ) 1) 2 + E D Y (G(X )) 2]. As always, there are plenty of specific technical details in the models and the training, e.g. using an history of generated images (Shrivastava et al., 2016). François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 71 / 84
 laboratory, UC Berkeley Monet Photos Zebras")


 zebras and horses from ImageNet; (right) summer and winter")
: using a collection of paintings of famous")




131 Jun-Yan Zhu Taesung Park Phillip Isola Alexei A. Efros Berkeley AI Research (BAIR) laboratory, UC Berkeley Monet Photos Zebras Horses Summer Winter iv: v2 [cs.cv] 5 Oct 2017 Monet photo photo Monet zebra horse Photograph Monet Van Gogh Cezanne Ukiyo-e Figure 1: Given any two unordered image collections X and Y, our algorithm learns to automatically translate an image from one into the other and vice versa: (left) Monet paintings and landscape photos from Flickr; (center) zebras and horses from ImageNet; (right) summer and winter Yosemite photos from Flickr. Example application (bottom): using a collection of paintings of famous artists, our method learns to render natural photographs into the respective styles. Abstract Image-to-image translation is a class of vision and graphics problems where the goal is to learn the mapping between an input image and an output image using a training set of aligned image pairs. However, for many tasks, paired training data will not be available. We present an horse zebra summer winter winter summer 1. Introduction (Zhu et al., 2017) What did Claude Monet see as he placed his easel by the bank of the Seine near Argenteuil on a lovely spring day in 1873 (Figure 1, top-left)? A color photograph, had it been invented, may have documented a crisp blue sky and François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 72 / 84
132 horse zebra zebra horse winter Yosemite summer Yosemite summer Yosemite winter Yosemite (Zhu et al., 2017) apple orange François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 73 / 84






 results")
















133 winter Yosemite summer Yosemite summer Yosemite winter Yosemite apple orange orange apple Figure 13: Our method applied to several translation problems. These images are selected(zhu as relatively et al., successful 2017) results please see our website for more comprehensive and random results. In the top two rows, we show results on object transfiguration between horses and zebras, trained on 939 images from the wild horse class and 1177 images from the zebra class in Imagenet [41]. The middle two rows show results on season transfer, trained on winter and summer photos of Yosemite from Flickr. In the bottom two rows, we train our method on 996 apple images and 1020 navel orange images from ImageNet. François Fleuret EE-559 Deep learning / 10. Generative Adversarial Networks 74 / 84
Lecture 14: Deep Generative Learning
 Generative Modeling CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 14: Deep Generative Learning Density estimation Reconstructing probability density function using samples Bohyung Han
Generative Modeling CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 14: Deep Generative Learning Density estimation Reconstructing probability density function using samples Bohyung Han
EE-559 Deep learning 9. Autoencoders and generative models
 EE-559 Deep learning 9. Autoencoders and generative models François Fleuret https://fleuret.org/dlc/ [version of: May 1, 2018] ÉCOLE POLYTECHNIQUE FÉDÉRALE DE LAUSANNE Embeddings and generative models
EE-559 Deep learning 9. Autoencoders and generative models François Fleuret https://fleuret.org/dlc/ [version of: May 1, 2018] ÉCOLE POLYTECHNIQUE FÉDÉRALE DE LAUSANNE Embeddings and generative models
Singing Voice Separation using Generative Adversarial Networks
 Singing Voice Separation using Generative Adversarial Networks Hyeong-seok Choi, Kyogu Lee Music and Audio Research Group Graduate School of Convergence Science and Technology Seoul National University
Singing Voice Separation using Generative Adversarial Networks Hyeong-seok Choi, Kyogu Lee Music and Audio Research Group Graduate School of Convergence Science and Technology Seoul National University
Generative adversarial networks
 14-1: Generative adversarial networks Prof. J.C. Kao, UCLA Generative adversarial networks Why GANs? GAN intuition GAN equilibrium GAN implementation Practical considerations Much of these notes are based
14-1: Generative adversarial networks Prof. J.C. Kao, UCLA Generative adversarial networks Why GANs? GAN intuition GAN equilibrium GAN implementation Practical considerations Much of these notes are based
Nishant Gurnani. GAN Reading Group. April 14th, / 107
 Nishant Gurnani GAN Reading Group April 14th, 2017 1 / 107 Why are these Papers Important? 2 / 107 Why are these Papers Important? Recently a large number of GAN frameworks have been proposed - BGAN, LSGAN,
Nishant Gurnani GAN Reading Group April 14th, 2017 1 / 107 Why are these Papers Important? 2 / 107 Why are these Papers Important? Recently a large number of GAN frameworks have been proposed - BGAN, LSGAN,
Composite Functional Gradient Learning of Generative Adversarial Models. Appendix
 A. Main theorem and its proof Appendix Theorem A.1 below, our main theorem, analyzes the extended KL-divergence for some β (0.5, 1] defined as follows: L β (p) := (βp (x) + (1 β)p(x)) ln βp (x) + (1 β)p(x)
A. Main theorem and its proof Appendix Theorem A.1 below, our main theorem, analyzes the extended KL-divergence for some β (0.5, 1] defined as follows: L β (p) := (βp (x) + (1 β)p(x)) ln βp (x) + (1 β)p(x)
Generative Adversarial Networks, and Applications
 Generative Adversarial Networks, and Applications Ali Mirzaei Nimish Srivastava Kwonjoon Lee Songting Xu CSE 252C 4/12/17 2/44 Outline: Generative Models vs Discriminative Models (Background) Generative
Generative Adversarial Networks, and Applications Ali Mirzaei Nimish Srivastava Kwonjoon Lee Songting Xu CSE 252C 4/12/17 2/44 Outline: Generative Models vs Discriminative Models (Background) Generative
CS 179: LECTURE 16 MODEL COMPLEXITY, REGULARIZATION, AND CONVOLUTIONAL NETS
 CS 179: LECTURE 16 MODEL COMPLEXITY, REGULARIZATION, AND CONVOLUTIONAL NETS LAST TIME Intro to cudnn Deep neural nets using cublas and cudnn TODAY Building a better model for image classification Overfitting
CS 179: LECTURE 16 MODEL COMPLEXITY, REGULARIZATION, AND CONVOLUTIONAL NETS LAST TIME Intro to cudnn Deep neural nets using cublas and cudnn TODAY Building a better model for image classification Overfitting
Deep Generative Image Models using a Laplacian Pyramid of Adversarial Networks
 Deep Generative Image Models using a Laplacian Pyramid of Adversarial Networks Emily Denton 1, Soumith Chintala 2, Arthur Szlam 2, Rob Fergus 2 1 New York University 2 Facebook AI Research Denotes equal
Deep Generative Image Models using a Laplacian Pyramid of Adversarial Networks Emily Denton 1, Soumith Chintala 2, Arthur Szlam 2, Rob Fergus 2 1 New York University 2 Facebook AI Research Denotes equal
arxiv: v3 [cs.lg] 2 Nov 2018
![arxiv: v3 [cs.lg] 2 Nov 2018](/thumbs/92/107945586.jpg "arxiv: v3 [cs.lg] 2 Nov 2018") PacGAN: The power of two samples in generative adversarial networks Zinan Lin, Ashish Khetan, Giulia Fanti, Sewoong Oh Carnegie Mellon University, University of Illinois at Urbana-Champaign arxiv:72.486v3
PacGAN: The power of two samples in generative adversarial networks Zinan Lin, Ashish Khetan, Giulia Fanti, Sewoong Oh Carnegie Mellon University, University of Illinois at Urbana-Champaign arxiv:72.486v3
Generative Adversarial Networks (GANs) Ian Goodfellow, OpenAI Research Scientist Presentation at Berkeley Artificial Intelligence Lab,
 Ian Goodfellow, OpenAI Research Scientist Presentation at Berkeley Artificial Intelligence Lab,") Generative Adversarial Networks (GANs) Ian Goodfellow, OpenAI Research Scientist Presentation at Berkeley Artificial Intelligence Lab, 2016-08-31 Generative Modeling Density estimation Sample generation
Generative Adversarial Networks (GANs) Ian Goodfellow, OpenAI Research Scientist Presentation at Berkeley Artificial Intelligence Lab, 2016-08-31 Generative Modeling Density estimation Sample generation
Introduction to Convolutional Neural Networks (CNNs)
") Introduction to Convolutional Neural Networks (CNNs) nojunk@snu.ac.kr http://mipal.snu.ac.kr Department of Transdisciplinary Studies Seoul National University, Korea Jan. 2016 Many slides are from Fei-Fei
Introduction to Convolutional Neural Networks (CNNs) nojunk@snu.ac.kr http://mipal.snu.ac.kr Department of Transdisciplinary Studies Seoul National University, Korea Jan. 2016 Many slides are from Fei-Fei
Need for Deep Networks Perceptron. Can only model linear functions. Kernel Machines. Non-linearity provided by kernels
 Need for Deep Networks Perceptron Can only model linear functions Kernel Machines Non-linearity provided by kernels Need to design appropriate kernels (possibly selecting from a set, i.e. kernel learning)
Need for Deep Networks Perceptron Can only model linear functions Kernel Machines Non-linearity provided by kernels Need to design appropriate kernels (possibly selecting from a set, i.e. kernel learning)
Introduction to Convolutional Neural Networks 2018 / 02 / 23
 Introduction to Convolutional Neural Networks 2018 / 02 / 23 Buzzword: CNN Convolutional neural networks (CNN, ConvNet) is a class of deep, feed-forward (not recurrent) artificial neural networks that
Introduction to Convolutional Neural Networks 2018 / 02 / 23 Buzzword: CNN Convolutional neural networks (CNN, ConvNet) is a class of deep, feed-forward (not recurrent) artificial neural networks that
Wasserstein GAN. Juho Lee. Jan 23, 2017
 Wasserstein GAN Juho Lee Jan 23, 2017 Wasserstein GAN (WGAN) Arxiv submission Martin Arjovsky, Soumith Chintala, and Léon Bottou A new GAN model minimizing the Earth-Mover s distance (Wasserstein-1 distance)
Wasserstein GAN Juho Lee Jan 23, 2017 Wasserstein GAN (WGAN) Arxiv submission Martin Arjovsky, Soumith Chintala, and Léon Bottou A new GAN model minimizing the Earth-Mover s distance (Wasserstein-1 distance)
Machine Learning Summer 2018 Exercise Sheet 4
 Ludwig-Maimilians-Universitaet Muenchen 17.05.2018 Institute for Informatics Prof. Dr. Volker Tresp Julian Busch Christian Frey Machine Learning Summer 2018 Eercise Sheet 4 Eercise 4-1 The Simpsons Characters
Ludwig-Maimilians-Universitaet Muenchen 17.05.2018 Institute for Informatics Prof. Dr. Volker Tresp Julian Busch Christian Frey Machine Learning Summer 2018 Eercise Sheet 4 Eercise 4-1 The Simpsons Characters
arxiv: v1 [stat.ml] 19 Jan 2018
![arxiv: v1 [stat.ml] 19 Jan 2018](/thumbs/89/98098742.jpg "arxiv: v1 [stat.ml] 19 Jan 2018") Composite Functional Gradient Learning of Generative Adversarial Models arxiv:80.06309v [stat.ml] 9 Jan 208 Rie Johnson RJ Research Consulting Tarrytown, NY, USA riejohnson@gmail.com Abstract Tong Zhang
Composite Functional Gradient Learning of Generative Adversarial Models arxiv:80.06309v [stat.ml] 9 Jan 208 Rie Johnson RJ Research Consulting Tarrytown, NY, USA riejohnson@gmail.com Abstract Tong Zhang
Do you like to be successful? Able to see the big picture
 Do you like to be successful? Able to see the big picture 1 Are you able to recognise a scientific GEM 2 How to recognise good work? suggestions please item#1 1st of its kind item#2 solve problem item#3
Do you like to be successful? Able to see the big picture 1 Are you able to recognise a scientific GEM 2 How to recognise good work? suggestions please item#1 1st of its kind item#2 solve problem item#3
Need for Deep Networks Perceptron. Can only model linear functions. Kernel Machines. Non-linearity provided by kernels
 Need for Deep Networks Perceptron Can only model linear functions Kernel Machines Non-linearity provided by kernels Need to design appropriate kernels (possibly selecting from a set, i.e. kernel learning)
Need for Deep Networks Perceptron Can only model linear functions Kernel Machines Non-linearity provided by kernels Need to design appropriate kernels (possibly selecting from a set, i.e. kernel learning)
GENERATIVE ADVERSARIAL LEARNING
 GENERATIVE ADVERSARIAL LEARNING OF MARKOV CHAINS Jiaming Song, Shengjia Zhao & Stefano Ermon Computer Science Department Stanford University {tsong,zhaosj12,ermon}@cs.stanford.edu ABSTRACT We investigate
GENERATIVE ADVERSARIAL LEARNING OF MARKOV CHAINS Jiaming Song, Shengjia Zhao & Stefano Ermon Computer Science Department Stanford University {tsong,zhaosj12,ermon}@cs.stanford.edu ABSTRACT We investigate
Energy-Based Generative Adversarial Network
 Energy-Based Generative Adversarial Network Energy-Based Generative Adversarial Network J. Zhao, M. Mathieu and Y. LeCun Learning to Draw Samples: With Application to Amoritized MLE for Generalized Adversarial
Energy-Based Generative Adversarial Network Energy-Based Generative Adversarial Network J. Zhao, M. Mathieu and Y. LeCun Learning to Draw Samples: With Application to Amoritized MLE for Generalized Adversarial
Apprentissage, réseaux de neurones et modèles graphiques (RCP209) Neural Networks and Deep Learning
 Neural Networks and Deep Learning") Apprentissage, réseaux de neurones et modèles graphiques (RCP209) Neural Networks and Deep Learning Nicolas Thome Prenom.Nom@cnam.fr http://cedric.cnam.fr/vertigo/cours/ml2/ Département Informatique Conservatoire
Apprentissage, réseaux de neurones et modèles graphiques (RCP209) Neural Networks and Deep Learning Nicolas Thome Prenom.Nom@cnam.fr http://cedric.cnam.fr/vertigo/cours/ml2/ Département Informatique Conservatoire
CS 6501: Deep Learning for Computer Graphics. Basics of Neural Networks. Connelly Barnes
 CS 6501: Deep Learning for Computer Graphics Basics of Neural Networks Connelly Barnes Overview Simple neural networks Perceptron Feedforward neural networks Multilayer perceptron and properties Autoencoders
CS 6501: Deep Learning for Computer Graphics Basics of Neural Networks Connelly Barnes Overview Simple neural networks Perceptron Feedforward neural networks Multilayer perceptron and properties Autoencoders
Generative Adversarial Networks
 Generative Adversarial Networks Stefano Ermon, Aditya Grover Stanford University Lecture 10 Stefano Ermon, Aditya Grover (AI Lab) Deep Generative Models Lecture 10 1 / 17 Selected GANs https://github.com/hindupuravinash/the-gan-zoo
Generative Adversarial Networks Stefano Ermon, Aditya Grover Stanford University Lecture 10 Stefano Ermon, Aditya Grover (AI Lab) Deep Generative Models Lecture 10 1 / 17 Selected GANs https://github.com/hindupuravinash/the-gan-zoo
A QUANTITATIVE MEASURE OF GENERATIVE ADVERSARIAL NETWORK DISTRIBUTIONS
 A QUANTITATIVE MEASURE OF GENERATIVE ADVERSARIAL NETWORK DISTRIBUTIONS Dan Hendrycks University of Chicago dan@ttic.edu Steven Basart University of Chicago xksteven@uchicago.edu ABSTRACT We introduce a
A QUANTITATIVE MEASURE OF GENERATIVE ADVERSARIAL NETWORK DISTRIBUTIONS Dan Hendrycks University of Chicago dan@ttic.edu Steven Basart University of Chicago xksteven@uchicago.edu ABSTRACT We introduce a
Understanding GANs: Back to the basics
 Understanding GANs: Back to the basics David Tse Stanford University Princeton University May 15, 2018 Joint work with Soheil Feizi, Farzan Farnia, Tony Ginart, Changho Suh and Fei Xia. GANs at NIPS 2017
Understanding GANs: Back to the basics David Tse Stanford University Princeton University May 15, 2018 Joint work with Soheil Feizi, Farzan Farnia, Tony Ginart, Changho Suh and Fei Xia. GANs at NIPS 2017
Machine Learning for Large-Scale Data Analysis and Decision Making A. Neural Networks Week #6
 Machine Learning for Large-Scale Data Analysis and Decision Making 80-629-17A Neural Networks Week #6 Today Neural Networks A. Modeling B. Fitting C. Deep neural networks Today s material is (adapted)
Machine Learning for Large-Scale Data Analysis and Decision Making 80-629-17A Neural Networks Week #6 Today Neural Networks A. Modeling B. Fitting C. Deep neural networks Today s material is (adapted)
Chapter 20. Deep Generative Models
 Peng et al.: Deep Learning and Practice 1 Chapter 20 Deep Generative Models Peng et al.: Deep Learning and Practice 2 Generative Models Models that are able to Provide an estimate of the probability distribution
Peng et al.: Deep Learning and Practice 1 Chapter 20 Deep Generative Models Peng et al.: Deep Learning and Practice 2 Generative Models Models that are able to Provide an estimate of the probability distribution
EE-559 Deep learning Recurrent Neural Networks
 EE-559 Deep learning 11.1. Recurrent Neural Networks François Fleuret https://fleuret.org/ee559/ Sun Feb 24 20:33:31 UTC 2019 Inference from sequences François Fleuret EE-559 Deep learning / 11.1. Recurrent
EE-559 Deep learning 11.1. Recurrent Neural Networks François Fleuret https://fleuret.org/ee559/ Sun Feb 24 20:33:31 UTC 2019 Inference from sequences François Fleuret EE-559 Deep learning / 11.1. Recurrent
arxiv: v1 [cs.lg] 20 Apr 2017
![arxiv: v1 [cs.lg] 20 Apr 2017](/thumbs/78/78348074.jpg "arxiv: v1 [cs.lg] 20 Apr 2017") Softmax GAN Min Lin Qihoo 360 Technology co. ltd Beijing, China, 0087 mavenlin@gmail.com arxiv:704.069v [cs.lg] 0 Apr 07 Abstract Softmax GAN is a novel variant of Generative Adversarial Network (GAN).
Softmax GAN Min Lin Qihoo 360 Technology co. ltd Beijing, China, 0087 mavenlin@gmail.com arxiv:704.069v [cs.lg] 0 Apr 07 Abstract Softmax GAN is a novel variant of Generative Adversarial Network (GAN).
Artificial Neural Networks D B M G. Data Base and Data Mining Group of Politecnico di Torino. Elena Baralis. Politecnico di Torino
 Artificial Neural Networks Data Base and Data Mining Group of Politecnico di Torino Elena Baralis Politecnico di Torino Artificial Neural Networks Inspired to the structure of the human brain Neurons as
Artificial Neural Networks Data Base and Data Mining Group of Politecnico di Torino Elena Baralis Politecnico di Torino Artificial Neural Networks Inspired to the structure of the human brain Neurons as
Lecture 3 Feedforward Networks and Backpropagation
 Lecture 3 Feedforward Networks and Backpropagation CMSC 35246: Deep Learning Shubhendu Trivedi & Risi Kondor University of Chicago April 3, 2017 Things we will look at today Recap of Logistic Regression
Lecture 3 Feedforward Networks and Backpropagation CMSC 35246: Deep Learning Shubhendu Trivedi & Risi Kondor University of Chicago April 3, 2017 Things we will look at today Recap of Logistic Regression
Lecture 3 Feedforward Networks and Backpropagation
 Lecture 3 Feedforward Networks and Backpropagation CMSC 35246: Deep Learning Shubhendu Trivedi & Risi Kondor University of Chicago April 3, 2017 Things we will look at today Recap of Logistic Regression
Lecture 3 Feedforward Networks and Backpropagation CMSC 35246: Deep Learning Shubhendu Trivedi & Risi Kondor University of Chicago April 3, 2017 Things we will look at today Recap of Logistic Regression
arxiv: v2 [cs.lg] 14 Sep 2017
![arxiv: v2 [cs.lg] 14 Sep 2017](/thumbs/88/115015623.jpg "arxiv: v2 [cs.lg] 14 Sep 2017") CausalGAN: Learning Causal Implicit Generative Models with Adversarial Training Murat Kocaoglu 1,a, Christopher Snyder 1,b, Alexandros G. Dimakis 1,c and Sriram Vishwanath 1,d arxiv:1709.02023v2 [cs.lg]
CausalGAN: Learning Causal Implicit Generative Models with Adversarial Training Murat Kocaoglu 1,a, Christopher Snyder 1,b, Alexandros G. Dimakis 1,c and Sriram Vishwanath 1,d arxiv:1709.02023v2 [cs.lg]
Deep Generative Models. (Unsupervised Learning)
") Deep Generative Models (Unsupervised Learning) CEng 783 Deep Learning Fall 2017 Emre Akbaş Reminders Next week: project progress demos in class Describe your problem/goal What you have done so far What
Deep Generative Models (Unsupervised Learning) CEng 783 Deep Learning Fall 2017 Emre Akbaş Reminders Next week: project progress demos in class Describe your problem/goal What you have done so far What
(Feed-Forward) Neural Networks Dr. Hajira Jabeen, Prof. Jens Lehmann
 Neural Networks Dr. Hajira Jabeen, Prof. Jens Lehmann") (Feed-Forward) Neural Networks 2016-12-06 Dr. Hajira Jabeen, Prof. Jens Lehmann Outline In the previous lectures we have learned about tensors and factorization methods. RESCAL is a bilinear model for
(Feed-Forward) Neural Networks 2016-12-06 Dr. Hajira Jabeen, Prof. Jens Lehmann Outline In the previous lectures we have learned about tensors and factorization methods. RESCAL is a bilinear model for
Convolutional Neural Networks
 Convolutional Neural Networks Books» http://www.deeplearningbook.org/ Books http://neuralnetworksanddeeplearning.com/.org/ reviews» http://www.deeplearningbook.org/contents/linear_algebra.html» http://www.deeplearningbook.org/contents/prob.html»
Convolutional Neural Networks Books» http://www.deeplearningbook.org/ Books http://neuralnetworksanddeeplearning.com/.org/ reviews» http://www.deeplearningbook.org/contents/linear_algebra.html» http://www.deeplearningbook.org/contents/prob.html»
Neural Networks 2. 2 Receptive fields and dealing with image inputs
 CS 446 Machine Learning Fall 2016 Oct 04, 2016 Neural Networks 2 Professor: Dan Roth Scribe: C. Cheng, C. Cervantes Overview Convolutional Neural Networks Recurrent Neural Networks 1 Introduction There
CS 446 Machine Learning Fall 2016 Oct 04, 2016 Neural Networks 2 Professor: Dan Roth Scribe: C. Cheng, C. Cervantes Overview Convolutional Neural Networks Recurrent Neural Networks 1 Introduction There
Statistical Machine Learning from Data
 January 17, 2006 Samy Bengio Statistical Machine Learning from Data 1 Statistical Machine Learning from Data Multi-Layer Perceptrons Samy Bengio IDIAP Research Institute, Martigny, Switzerland, and Ecole
January 17, 2006 Samy Bengio Statistical Machine Learning from Data 1 Statistical Machine Learning from Data Multi-Layer Perceptrons Samy Bengio IDIAP Research Institute, Martigny, Switzerland, and Ecole
Unsupervised Learning
 CS 3750 Advanced Machine Learning hkc6@pitt.edu Unsupervised Learning Data: Just data, no labels Goal: Learn some underlying hidden structure of the data P(, ) P( ) Principle Component Analysis (Dimensionality
CS 3750 Advanced Machine Learning hkc6@pitt.edu Unsupervised Learning Data: Just data, no labels Goal: Learn some underlying hidden structure of the data P(, ) P( ) Principle Component Analysis (Dimensionality
Convolutional Neural Network Architecture
 Convolutional Neural Network Architecture Zhisheng Zhong Feburary 2nd, 2018 Zhisheng Zhong Convolutional Neural Network Architecture Feburary 2nd, 2018 1 / 55 Outline 1 Introduction of Convolution Motivation
Convolutional Neural Network Architecture Zhisheng Zhong Feburary 2nd, 2018 Zhisheng Zhong Convolutional Neural Network Architecture Feburary 2nd, 2018 1 / 55 Outline 1 Introduction of Convolution Motivation
Comments. Assignment 3 code released. Thought questions 3 due this week. Mini-project: hopefully you have started. implement classification algorithms
 Neural networks Comments Assignment 3 code released implement classification algorithms use kernels for census dataset Thought questions 3 due this week Mini-project: hopefully you have started 2 Example:
Neural networks Comments Assignment 3 code released implement classification algorithms use kernels for census dataset Thought questions 3 due this week Mini-project: hopefully you have started 2 Example:
CS 229 Project Final Report: Reinforcement Learning for Neural Network Architecture Category : Theory & Reinforcement Learning
 CS 229 Project Final Report: Reinforcement Learning for Neural Network Architecture Category : Theory & Reinforcement Learning Lei Lei Ruoxuan Xiong December 16, 2017 1 Introduction Deep Neural Network
CS 229 Project Final Report: Reinforcement Learning for Neural Network Architecture Category : Theory & Reinforcement Learning Lei Lei Ruoxuan Xiong December 16, 2017 1 Introduction Deep Neural Network
MMD GAN 1 Fisher GAN 2
 MMD GAN 1 Fisher GAN 1 Chun-Liang Li, Wei-Cheng Chang, Yu Cheng, Yiming Yang, and Barnabás Póczos (CMU, IBM Research) Youssef Mroueh, and Tom Sercu (IBM Research) Presented by Rui-Yi(Roy) Zhang Decemeber
MMD GAN 1 Fisher GAN 1 Chun-Liang Li, Wei-Cheng Chang, Yu Cheng, Yiming Yang, and Barnabás Póczos (CMU, IBM Research) Youssef Mroueh, and Tom Sercu (IBM Research) Presented by Rui-Yi(Roy) Zhang Decemeber
Lightweight Probabilistic Deep Networks Supplemental Material
 Lightweight Probabilistic Deep Networks Supplemental Material Jochen Gast Stefan Roth Department of Computer Science, TU Darmstadt In this supplemental material we derive the recipe to create uncertainty
Lightweight Probabilistic Deep Networks Supplemental Material Jochen Gast Stefan Roth Department of Computer Science, TU Darmstadt In this supplemental material we derive the recipe to create uncertainty
Deep Learning for Computer Vision
 Deep Learning for Computer Vision Spring 2018 http://vllab.ee.ntu.edu.tw/dlcv.html (primary) https://ceiba.ntu.edu.tw/1062dlcv (grade, etc.) FB: DLCV Spring 2018 Yu-Chiang Frank Wang 王鈺強, Associate Professor
Deep Learning for Computer Vision Spring 2018 http://vllab.ee.ntu.edu.tw/dlcv.html (primary) https://ceiba.ntu.edu.tw/1062dlcv (grade, etc.) FB: DLCV Spring 2018 Yu-Chiang Frank Wang 王鈺強, Associate Professor
A practical theory for designing very deep convolutional neural networks. Xudong Cao.
 A practical theory for designing very deep convolutional neural networks Xudong Cao notcxd@gmail.com Abstract Going deep is essential for deep learning. However it is not easy, there are many ways of going
A practical theory for designing very deep convolutional neural networks Xudong Cao notcxd@gmail.com Abstract Going deep is essential for deep learning. However it is not easy, there are many ways of going
Discrete Mathematics and Probability Theory Fall 2015 Lecture 21
 CS 70 Discrete Mathematics and Probability Theory Fall 205 Lecture 2 Inference In this note we revisit the problem of inference: Given some data or observations from the world, what can we infer about
CS 70 Discrete Mathematics and Probability Theory Fall 205 Lecture 2 Inference In this note we revisit the problem of inference: Given some data or observations from the world, what can we infer about
Generative Adversarial Networks
 Generative Adversarial Networks SIBGRAPI 2017 Tutorial Everything you wanted to know about Deep Learning for Computer Vision but were afraid to ask Presentation content inspired by Ian Goodfellow s tutorial
Generative Adversarial Networks SIBGRAPI 2017 Tutorial Everything you wanted to know about Deep Learning for Computer Vision but were afraid to ask Presentation content inspired by Ian Goodfellow s tutorial
Asaf Bar Zvi Adi Hayat. Semantic Segmentation
 Asaf Bar Zvi Adi Hayat Semantic Segmentation Today s Topics Fully Convolutional Networks (FCN) (CVPR 2015) Conditional Random Fields as Recurrent Neural Networks (ICCV 2015) Gaussian Conditional random
Asaf Bar Zvi Adi Hayat Semantic Segmentation Today s Topics Fully Convolutional Networks (FCN) (CVPR 2015) Conditional Random Fields as Recurrent Neural Networks (ICCV 2015) Gaussian Conditional random
Failures of Gradient-Based Deep Learning
 Failures of Gradient-Based Deep Learning Shai Shalev-Shwartz, Shaked Shammah, Ohad Shamir The Hebrew University and Mobileye Representation Learning Workshop Simons Institute, Berkeley, 2017 Shai Shalev-Shwartz
Failures of Gradient-Based Deep Learning Shai Shalev-Shwartz, Shaked Shammah, Ohad Shamir The Hebrew University and Mobileye Representation Learning Workshop Simons Institute, Berkeley, 2017 Shai Shalev-Shwartz
Generative Adversarial Networks. Presented by Yi Zhang
 Generative Adversarial Networks Presented by Yi Zhang Deep Generative Models N(O, I) Variational Auto-Encoders GANs Unreasonable Effectiveness of GANs GANs Discriminator tries to distinguish genuine data
Generative Adversarial Networks Presented by Yi Zhang Deep Generative Models N(O, I) Variational Auto-Encoders GANs Unreasonable Effectiveness of GANs GANs Discriminator tries to distinguish genuine data
Deep Feedforward Networks. Lecture slides for Chapter 6 of Deep Learning Ian Goodfellow Last updated
 Deep Feedforward Networks Lecture slides for Chapter 6 of Deep Learning www.deeplearningbook.org Ian Goodfellow Last updated 2016-10-04 Roadmap Example: Learning XOR Gradient-Based Learning Hidden Units
Deep Feedforward Networks Lecture slides for Chapter 6 of Deep Learning www.deeplearningbook.org Ian Goodfellow Last updated 2016-10-04 Roadmap Example: Learning XOR Gradient-Based Learning Hidden Units
A graph contains a set of nodes (vertices) connected by links (edges or arcs)
 connected by links (edges or arcs)") BOLTZMANN MACHINES Generative Models Graphical Models A graph contains a set of nodes (vertices) connected by links (edges or arcs) In a probabilistic graphical model, each node represents a random variable,
BOLTZMANN MACHINES Generative Models Graphical Models A graph contains a set of nodes (vertices) connected by links (edges or arcs) In a probabilistic graphical model, each node represents a random variable,
Machine learning comes from Bayesian decision theory in statistics. There we want to minimize the expected value of the loss function.
 Bayesian learning: Machine learning comes from Bayesian decision theory in statistics. There we want to minimize the expected value of the loss function. Let y be the true label and y be the predicted
Bayesian learning: Machine learning comes from Bayesian decision theory in statistics. There we want to minimize the expected value of the loss function. Let y be the true label and y be the predicted
Lecture 17: Neural Networks and Deep Learning
 UVA CS 6316 / CS 4501-004 Machine Learning Fall 2016 Lecture 17: Neural Networks and Deep Learning Jack Lanchantin Dr. Yanjun Qi 1 Neurons 1-Layer Neural Network Multi-layer Neural Network Loss Functions
UVA CS 6316 / CS 4501-004 Machine Learning Fall 2016 Lecture 17: Neural Networks and Deep Learning Jack Lanchantin Dr. Yanjun Qi 1 Neurons 1-Layer Neural Network Multi-layer Neural Network Loss Functions
Deep Learning Lab Course 2017 (Deep Learning Practical)
") Deep Learning Lab Course 207 (Deep Learning Practical) Labs: (Computer Vision) Thomas Brox, (Robotics) Wolfram Burgard, (Machine Learning) Frank Hutter, (Neurorobotics) Joschka Boedecker University of
Deep Learning Lab Course 207 (Deep Learning Practical) Labs: (Computer Vision) Thomas Brox, (Robotics) Wolfram Burgard, (Machine Learning) Frank Hutter, (Neurorobotics) Joschka Boedecker University of
Robustness in GANs and in Black-box Optimization
 Robustness in GANs and in Black-box Optimization Stefanie Jegelka MIT CSAIL joint work with Zhi Xu, Chengtao Li, Ilija Bogunovic, Jonathan Scarlett and Volkan Cevher Robustness in ML noise Generator Critic
Robustness in GANs and in Black-box Optimization Stefanie Jegelka MIT CSAIL joint work with Zhi Xu, Chengtao Li, Ilija Bogunovic, Jonathan Scarlett and Volkan Cevher Robustness in ML noise Generator Critic
<Special Topics in VLSI> Learning for Deep Neural Networks (Back-propagation)
") Learning for Deep Neural Networks (Back-propagation) Outline Summary of Previous Standford Lecture Universal Approximation Theorem Inference vs Training Gradient Descent Back-Propagation
Learning for Deep Neural Networks (Back-propagation) Outline Summary of Previous Standford Lecture Universal Approximation Theorem Inference vs Training Gradient Descent Back-Propagation
Local Affine Approximators for Improving Knowledge Transfer
 Local Affine Approximators for Improving Knowledge Transfer Suraj Srinivas & François Fleuret Idiap Research Institute and EPFL {suraj.srinivas, francois.fleuret}@idiap.ch Abstract The Jacobian of a neural
Local Affine Approximators for Improving Knowledge Transfer Suraj Srinivas & François Fleuret Idiap Research Institute and EPFL {suraj.srinivas, francois.fleuret}@idiap.ch Abstract The Jacobian of a neural
Adversarial Examples
 Adversarial Examples presentation by Ian Goodfellow Deep Learning Summer School Montreal August 9, 2015 In this presentation. - Intriguing Properties of Neural Networks. Szegedy et al., ICLR 2014. - Explaining
Adversarial Examples presentation by Ian Goodfellow Deep Learning Summer School Montreal August 9, 2015 In this presentation. - Intriguing Properties of Neural Networks. Szegedy et al., ICLR 2014. - Explaining
Deep Feedforward Networks. Sargur N. Srihari
 Deep Feedforward Networks Sargur N. srihari@cedar.buffalo.edu 1 Topics Overview 1. Example: Learning XOR 2. Gradient-Based Learning 3. Hidden Units 4. Architecture Design 5. Backpropagation and Other Differentiation
Deep Feedforward Networks Sargur N. srihari@cedar.buffalo.edu 1 Topics Overview 1. Example: Learning XOR 2. Gradient-Based Learning 3. Hidden Units 4. Architecture Design 5. Backpropagation and Other Differentiation
Maxout Networks. Hien Quoc Dang
 Maxout Networks Hien Quoc Dang Outline Introduction Maxout Networks Description A Universal Approximator & Proof Experiments with Maxout Why does Maxout work? Conclusion 10/12/13 Hien Quoc Dang Machine
Maxout Networks Hien Quoc Dang Outline Introduction Maxout Networks Description A Universal Approximator & Proof Experiments with Maxout Why does Maxout work? Conclusion 10/12/13 Hien Quoc Dang Machine
Introduction to Deep Neural Networks
 Introduction to Deep Neural Networks Presenter: Chunyuan Li Pattern Classification and Recognition (ECE 681.01) Duke University April, 2016 Outline 1 Background and Preliminaries Why DNNs? Model: Logistic
Introduction to Deep Neural Networks Presenter: Chunyuan Li Pattern Classification and Recognition (ECE 681.01) Duke University April, 2016 Outline 1 Background and Preliminaries Why DNNs? Model: Logistic
The connection of dropout and Bayesian statistics
 The connection of dropout and Bayesian statistics Interpretation of dropout as approximate Bayesian modelling of NN http://mlg.eng.cam.ac.uk/yarin/thesis/thesis.pdf Dropout Geoffrey Hinton Google, University
The connection of dropout and Bayesian statistics Interpretation of dropout as approximate Bayesian modelling of NN http://mlg.eng.cam.ac.uk/yarin/thesis/thesis.pdf Dropout Geoffrey Hinton Google, University
Deep Learning Recurrent Networks 2/28/2018
 Deep Learning Recurrent Networks /8/8 Recap: Recurrent networks can be incredibly effective Story so far Y(t+) Stock vector X(t) X(t+) X(t+) X(t+) X(t+) X(t+5) X(t+) X(t+7) Iterated structures are good
Deep Learning Recurrent Networks /8/8 Recap: Recurrent networks can be incredibly effective Story so far Y(t+) Stock vector X(t) X(t+) X(t+) X(t+) X(t+) X(t+5) X(t+) X(t+7) Iterated structures are good
Deep Feedforward Networks. Han Shao, Hou Pong Chan, and Hongyi Zhang
 Deep Feedforward Networks Han Shao, Hou Pong Chan, and Hongyi Zhang Deep Feedforward Networks Goal: approximate some function f e.g., a classifier, maps input to a class y = f (x) x y Defines a mapping
Deep Feedforward Networks Han Shao, Hou Pong Chan, and Hongyi Zhang Deep Feedforward Networks Goal: approximate some function f e.g., a classifier, maps input to a class y = f (x) x y Defines a mapping
Some theoretical properties of GANs. Gérard Biau Toulouse, September 2018
 Some theoretical properties of GANs Gérard Biau Toulouse, September 2018 Coauthors Benoît Cadre (ENS Rennes) Maxime Sangnier (Sorbonne University) Ugo Tanielian (Sorbonne University & Criteo) 1 video Source:
Some theoretical properties of GANs Gérard Biau Toulouse, September 2018 Coauthors Benoît Cadre (ENS Rennes) Maxime Sangnier (Sorbonne University) Ugo Tanielian (Sorbonne University & Criteo) 1 video Source:
Index. Santanu Pattanayak 2017 S. Pattanayak, Pro Deep Learning with TensorFlow,
 Index A Activation functions, neuron/perceptron binary threshold activation function, 102 103 linear activation function, 102 rectified linear unit, 106 sigmoid activation function, 103 104 SoftMax activation
Index A Activation functions, neuron/perceptron binary threshold activation function, 102 103 linear activation function, 102 rectified linear unit, 106 sigmoid activation function, 103 104 SoftMax activation
9 Classification. 9.1 Linear Classifiers
 9 Classification This topic returns to prediction. Unlike linear regression where we were predicting a numeric value, in this case we are predicting a class: winner or loser, yes or no, rich or poor, positive
9 Classification This topic returns to prediction. Unlike linear regression where we were predicting a numeric value, in this case we are predicting a class: winner or loser, yes or no, rich or poor, positive
CSCI567 Machine Learning (Fall 2018)
") CSCI567 Machine Learning (Fall 2018) Prof. Haipeng Luo U of Southern California Sep 12, 2018 September 12, 2018 1 / 49 Administration GitHub repos are setup (ask TA Chi Zhang for any issues) HW 1 is due
CSCI567 Machine Learning (Fall 2018) Prof. Haipeng Luo U of Southern California Sep 12, 2018 September 12, 2018 1 / 49 Administration GitHub repos are setup (ask TA Chi Zhang for any issues) HW 1 is due
CS60010: Deep Learning
 CS60010: Deep Learning Sudeshna Sarkar Spring 2018 16 Jan 2018 FFN Goal: Approximate some unknown ideal function f : X! Y Ideal classifier: y = f*(x) with x and category y Feedforward Network: Define parametric
CS60010: Deep Learning Sudeshna Sarkar Spring 2018 16 Jan 2018 FFN Goal: Approximate some unknown ideal function f : X! Y Ideal classifier: y = f*(x) with x and category y Feedforward Network: Define parametric
Recurrent Neural Networks with Flexible Gates using Kernel Activation Functions
 2018 IEEE International Workshop on Machine Learning for Signal Processing (MLSP 18) Recurrent Neural Networks with Flexible Gates using Kernel Activation Functions Authors: S. Scardapane, S. Van Vaerenbergh,
2018 IEEE International Workshop on Machine Learning for Signal Processing (MLSP 18) Recurrent Neural Networks with Flexible Gates using Kernel Activation Functions Authors: S. Scardapane, S. Van Vaerenbergh,
Normalization Techniques in Training of Deep Neural Networks
 Normalization Techniques in Training of Deep Neural Networks Lei Huang ( 黄雷 ) State Key Laboratory of Software Development Environment, Beihang University Mail:huanglei@nlsde.buaa.edu.cn August 17 th,
Normalization Techniques in Training of Deep Neural Networks Lei Huang ( 黄雷 ) State Key Laboratory of Software Development Environment, Beihang University Mail:huanglei@nlsde.buaa.edu.cn August 17 th,
Deep learning / Ian Goodfellow, Yoshua Bengio and Aaron Courville. - Cambridge, MA ; London, Spis treści
 Deep learning / Ian Goodfellow, Yoshua Bengio and Aaron Courville. - Cambridge, MA ; London, 2017 Spis treści Website Acknowledgments Notation xiii xv xix 1 Introduction 1 1.1 Who Should Read This Book?
Deep learning / Ian Goodfellow, Yoshua Bengio and Aaron Courville. - Cambridge, MA ; London, 2017 Spis treści Website Acknowledgments Notation xiii xv xix 1 Introduction 1 1.1 Who Should Read This Book?
HOMEWORK #4: LOGISTIC REGRESSION
 HOMEWORK #4: LOGISTIC REGRESSION Probabilistic Learning: Theory and Algorithms CS 274A, Winter 2018 Due: Friday, February 23rd, 2018, 11:55 PM Submit code and report via EEE Dropbox You should submit a
HOMEWORK #4: LOGISTIC REGRESSION Probabilistic Learning: Theory and Algorithms CS 274A, Winter 2018 Due: Friday, February 23rd, 2018, 11:55 PM Submit code and report via EEE Dropbox You should submit a
ECE521 Lectures 9 Fully Connected Neural Networks
 ECE521 Lectures 9 Fully Connected Neural Networks Outline Multi-class classification Learning multi-layer neural networks 2 Measuring distance in probability space We learnt that the squared L2 distance
ECE521 Lectures 9 Fully Connected Neural Networks Outline Multi-class classification Learning multi-layer neural networks 2 Measuring distance in probability space We learnt that the squared L2 distance
Do not tear exam apart!
 6.036: Final Exam: Fall 2017 Do not tear exam apart! This is a closed book exam. Calculators not permitted. Useful formulas on page 1. The problems are not necessarily in any order of di culty. Record
6.036: Final Exam: Fall 2017 Do not tear exam apart! This is a closed book exam. Calculators not permitted. Useful formulas on page 1. The problems are not necessarily in any order of di culty. Record
text classification 3: neural networks
 text classification 3: neural networks CS 585, Fall 2018 Introduction to Natural Language Processing http://people.cs.umass.edu/~miyyer/cs585/ Mohit Iyyer College of Information and Computer Sciences University
text classification 3: neural networks CS 585, Fall 2018 Introduction to Natural Language Processing http://people.cs.umass.edu/~miyyer/cs585/ Mohit Iyyer College of Information and Computer Sciences University
Experiments on the Consciousness Prior
 Yoshua Bengio and William Fedus UNIVERSITÉ DE MONTRÉAL, MILA Abstract Experiments are proposed to explore a novel prior for representation learning, which can be combined with other priors in order to
Yoshua Bengio and William Fedus UNIVERSITÉ DE MONTRÉAL, MILA Abstract Experiments are proposed to explore a novel prior for representation learning, which can be combined with other priors in order to
Lecture 5 Neural models for NLP
 CS546: Machine Learning in NLP (Spring 2018) http://courses.engr.illinois.edu/cs546/ Lecture 5 Neural models for NLP Julia Hockenmaier juliahmr@illinois.edu 3324 Siebel Center Office hours: Tue/Thu 2pm-3pm
CS546: Machine Learning in NLP (Spring 2018) http://courses.engr.illinois.edu/cs546/ Lecture 5 Neural models for NLP Julia Hockenmaier juliahmr@illinois.edu 3324 Siebel Center Office hours: Tue/Thu 2pm-3pm
Ch.6 Deep Feedforward Networks (2/3)
") Ch.6 Deep Feedforward Networks (2/3) 16. 10. 17. (Mon.) System Software Lab., Dept. of Mechanical & Information Eng. Woonggy Kim 1 Contents 6.3. Hidden Units 6.3.1. Rectified Linear Units and Their Generalizations
Ch.6 Deep Feedforward Networks (2/3) 16. 10. 17. (Mon.) System Software Lab., Dept. of Mechanical & Information Eng. Woonggy Kim 1 Contents 6.3. Hidden Units 6.3.1. Rectified Linear Units and Their Generalizations
Machine Learning Basics
 Security and Fairness of Deep Learning Machine Learning Basics Anupam Datta CMU Spring 2019 Image Classification Image Classification Image classification pipeline Input: A training set of N images, each
Security and Fairness of Deep Learning Machine Learning Basics Anupam Datta CMU Spring 2019 Image Classification Image Classification Image classification pipeline Input: A training set of N images, each
How to do backpropagation in a brain
 How to do backpropagation in a brain Geoffrey Hinton Canadian Institute for Advanced Research & University of Toronto & Google Inc. Prelude I will start with three slides explaining a popular type of deep
How to do backpropagation in a brain Geoffrey Hinton Canadian Institute for Advanced Research & University of Toronto & Google Inc. Prelude I will start with three slides explaining a popular type of deep
An overview of deep learning methods for genomics
 An overview of deep learning methods for genomics Matthew Ploenzke STAT115/215/BIO/BIST282 Harvard University April 19, 218 1 Snapshot 1. Brief introduction to convolutional neural networks What is deep
An overview of deep learning methods for genomics Matthew Ploenzke STAT115/215/BIO/BIST282 Harvard University April 19, 218 1 Snapshot 1. Brief introduction to convolutional neural networks What is deep
Learning Recurrent Neural Networks with Hessian-Free Optimization: Supplementary Materials
 Learning Recurrent Neural Networks with Hessian-Free Optimization: Supplementary Materials Contents 1 Pseudo-code for the damped Gauss-Newton vector product 2 2 Details of the pathological synthetic problems
Learning Recurrent Neural Networks with Hessian-Free Optimization: Supplementary Materials Contents 1 Pseudo-code for the damped Gauss-Newton vector product 2 2 Details of the pathological synthetic problems
Learning Deep Architectures for AI. Part II - Vijay Chakilam
 Learning Deep Architectures for AI - Yoshua Bengio Part II - Vijay Chakilam Limitations of Perceptron x1 W, b 0,1 1,1 y x2 weight plane output =1 output =0 There is no value for W and b such that the model
Learning Deep Architectures for AI - Yoshua Bengio Part II - Vijay Chakilam Limitations of Perceptron x1 W, b 0,1 1,1 y x2 weight plane output =1 output =0 There is no value for W and b such that the model
TTIC 31230, Fundamentals of Deep Learning David McAllester, Winter Generalization and Regularization
 TTIC 31230, Fundamentals of Deep Learning David McAllester, Winter 2019 Generalization and Regularization 1 Chomsky vs. Kolmogorov and Hinton Noam Chomsky: Natural language grammar cannot be learned by
TTIC 31230, Fundamentals of Deep Learning David McAllester, Winter 2019 Generalization and Regularization 1 Chomsky vs. Kolmogorov and Hinton Noam Chomsky: Natural language grammar cannot be learned by
Topics in AI (CPSC 532L): Multimodal Learning with Vision, Language and Sound. Lecture 3: Introduction to Deep Learning (continued)
: Multimodal Learning with Vision, Language and Sound. Lecture 3: Introduction to Deep Learning (continued)") Topics in AI (CPSC 532L): Multimodal Learning with Vision, Language and Sound Lecture 3: Introduction to Deep Learning (continued) Course Logistics - Update on course registrations - 6 seats left now -
Topics in AI (CPSC 532L): Multimodal Learning with Vision, Language and Sound Lecture 3: Introduction to Deep Learning (continued) Course Logistics - Update on course registrations - 6 seats left now -
Variational Autoencoders
 Variational Autoencoders Recap: Story so far A classification MLP actually comprises two components A feature extraction network that converts the inputs into linearly separable features Or nearly linearly
Variational Autoencoders Recap: Story so far A classification MLP actually comprises two components A feature extraction network that converts the inputs into linearly separable features Or nearly linearly
WHY ARE DEEP NETS REVERSIBLE: A SIMPLE THEORY,
 WHY ARE DEEP NETS REVERSIBLE: A SIMPLE THEORY, WITH IMPLICATIONS FOR TRAINING Sanjeev Arora, Yingyu Liang & Tengyu Ma Department of Computer Science Princeton University Princeton, NJ 08540, USA {arora,yingyul,tengyu}@cs.princeton.edu
WHY ARE DEEP NETS REVERSIBLE: A SIMPLE THEORY, WITH IMPLICATIONS FOR TRAINING Sanjeev Arora, Yingyu Liang & Tengyu Ma Department of Computer Science Princeton University Princeton, NJ 08540, USA {arora,yingyul,tengyu}@cs.princeton.edu
EE-559 Deep learning LSTM and GRU
 EE-559 Deep learning 11.2. LSTM and GRU François Fleuret https://fleuret.org/ee559/ Mon Feb 18 13:33:24 UTC 2019 ÉCOLE POLYTECHNIQUE FÉDÉRALE DE LAUSANNE The Long-Short Term Memory unit (LSTM) by Hochreiter
EE-559 Deep learning 11.2. LSTM and GRU François Fleuret https://fleuret.org/ee559/ Mon Feb 18 13:33:24 UTC 2019 ÉCOLE POLYTECHNIQUE FÉDÉRALE DE LAUSANNE The Long-Short Term Memory unit (LSTM) by Hochreiter
1 Machine Learning Concepts (16 points)
") CSCI 567 Fall 2018 Midterm Exam DO NOT OPEN EXAM UNTIL INSTRUCTED TO DO SO PLEASE TURN OFF ALL CELL PHONES Problem 1 2 3 4 5 6 Total Max 16 10 16 42 24 12 120 Points Please read the following instructions
CSCI 567 Fall 2018 Midterm Exam DO NOT OPEN EXAM UNTIL INSTRUCTED TO DO SO PLEASE TURN OFF ALL CELL PHONES Problem 1 2 3 4 5 6 Total Max 16 10 16 42 24 12 120 Points Please read the following instructions
Probabilistic Graphical Models
 10-708 Probabilistic Graphical Models Homework 3 (v1.1.0) Due Apr 14, 7:00 PM Rules: 1. Homework is due on the due date at 7:00 PM. The homework should be submitted via Gradescope. Solution to each problem
10-708 Probabilistic Graphical Models Homework 3 (v1.1.0) Due Apr 14, 7:00 PM Rules: 1. Homework is due on the due date at 7:00 PM. The homework should be submitted via Gradescope. Solution to each problem
Lecture 16 Deep Neural Generative Models
 Lecture 16 Deep Neural Generative Models CMSC 35246: Deep Learning Shubhendu Trivedi & Risi Kondor University of Chicago May 22, 2017 Approach so far: We have considered simple models and then constructed
Lecture 16 Deep Neural Generative Models CMSC 35246: Deep Learning Shubhendu Trivedi & Risi Kondor University of Chicago May 22, 2017 Approach so far: We have considered simple models and then constructed
EXAM IN STATISTICAL MACHINE LEARNING STATISTISK MASKININLÄRNING
 EXAM IN STATISTICAL MACHINE LEARNING STATISTISK MASKININLÄRNING DATE AND TIME: August 30, 2018, 14.00 19.00 RESPONSIBLE TEACHER: Niklas Wahlström NUMBER OF PROBLEMS: 5 AIDING MATERIAL: Calculator, mathematical
EXAM IN STATISTICAL MACHINE LEARNING STATISTISK MASKININLÄRNING DATE AND TIME: August 30, 2018, 14.00 19.00 RESPONSIBLE TEACHER: Niklas Wahlström NUMBER OF PROBLEMS: 5 AIDING MATERIAL: Calculator, mathematical
A Unified View of Deep Generative Models
 SAILING LAB Laboratory for Statistical Artificial InteLigence & INtegreative Genomics A Unified View of Deep Generative Models Zhiting Hu and Eric Xing Petuum Inc. Carnegie Mellon University 1 Deep generative
SAILING LAB Laboratory for Statistical Artificial InteLigence & INtegreative Genomics A Unified View of Deep Generative Models Zhiting Hu and Eric Xing Petuum Inc. Carnegie Mellon University 1 Deep generative
Deep Feedforward Networks. Seung-Hoon Na Chonbuk National University
 Deep Feedforward Networks Seung-Hoon Na Chonbuk National University Neural Network: Types Feedforward neural networks (FNN) = Deep feedforward networks = multilayer perceptrons (MLP) No feedback connections
Deep Feedforward Networks Seung-Hoon Na Chonbuk National University Neural Network: Types Feedforward neural networks (FNN) = Deep feedforward networks = multilayer perceptrons (MLP) No feedback connections
Variational Autoencoders (VAEs)
") September 26 & October 3, 2017 Section 1 Preliminaries Kullback-Leibler divergence KL divergence (continuous case) p(x) andq(x) are two density distributions. Then the KL-divergence is defined as Z KL(p
September 26 & October 3, 2017 Section 1 Preliminaries Kullback-Leibler divergence KL divergence (continuous case) p(x) andq(x) are two density distributions. Then the KL-divergence is defined as Z KL(p
Machine Learning for Computer Vision 8. Neural Networks and Deep Learning. Vladimir Golkov Technical University of Munich Computer Vision Group
 Machine Learning for Computer Vision 8. Neural Networks and Deep Learning Vladimir Golkov Technical University of Munich Computer Vision Group INTRODUCTION Nonlinear Coordinate Transformation http://cs.stanford.edu/people/karpathy/convnetjs/
Machine Learning for Computer Vision 8. Neural Networks and Deep Learning Vladimir Golkov Technical University of Munich Computer Vision Group INTRODUCTION Nonlinear Coordinate Transformation http://cs.stanford.edu/people/karpathy/convnetjs/