Modeling Mutual Context of Object and Human Pose in Human-Object Interaction Activities
|
|
|
- Harvey Sharp
- 5 years ago
- Views:
Transcription




1 Modeling Mutual Context of Object and Human Pose in Human-Object Interaction Activities Bangpeng Yao and Li Fei-Fei Computer Science Department, Stanford University 1


2 Human-Object Interaction Robots interact with objects Automatic sports commentary Kobe is dunking the ball. Medical care 2
 Detailed")



3 Human-Object Interaction Holistic image based classification (Previous talk: Grouplet) Detailed understanding and reasoning Vs. Playing bassoon Playing saxophone Playing saxophone Grouplet is a generic feature for structured objects, or interactions of groups of objects. Caltech101 HOI activity: Tennis Forehand Berg & Malik, 2005 Grauman & Darrell, 2005 Gehler & Nowozin, 2009 OURS 48% 59% 77% 62% 3
4 Human-Object Interaction Holistic image based classification Detailed understanding and reasoning Human pose estimation Head Torso 4

5 Human-Object Interaction Holistic image based classification Detailed understanding and reasoning Human pose estimation Object detection Tennis racket 5
6 Human-Object Interaction Holistic image based classification Detailed understanding and reasoning Human pose estimation Object detection Head Tennis racket Torso HOI activity: Tennis Forehand 6
7 Outline Background and Intuition Mutual Context of Object and Human Pose Model Representation Model Learning Model Inference Experiments Conclusion 7
8 Outline Background and Intuition Mutual Context of Object and Human Pose Model Representation Model Learning Model Inference Experiments Conclusion 8
9 Human pose estimation & Object detection Human pose estimation is challenging. Difficult part appearance Self-occlusion Image region looks like a body part Felzenszwalb & Huttenlocher, 2005 Ren et al, 2005 Ramanan, 2006 Ferrari et al, 2008 Yang & Mori, 2008 Andriluka et al, 2009 Eichner & Ferrari,
10 Human pose estimation & Object detection Human pose estimation is challenging. Felzenszwalb & Huttenlocher, 2005 Ren et al, 2005 Ramanan, 2006 Ferrari et al, 2008 Yang & Mori, 2008 Andriluka et al, 2009 Eichner & Ferrari,
11 Human pose estimation & Object detection Facilitate Given the object is detected. 11
12 Human pose estimation & Object detection Small, low-resolution, partially occluded Object detection is challenging Image region similar to detection target Viola & Jones, 2001 Lampert et al, 2008 Divvala et al, 2009 Vedaldi et al,
13 Human pose estimation & Object detection Object detection is challenging Viola & Jones, 2001 Lampert et al, 2008 Divvala et al, 2009 Vedaldi et al,
14 Human pose estimation & Object detection Facilitate Given the pose is estimated. 14
15 Human pose estimation & Object detection Mutual Context 15




16 Context in Computer Vision Previous work Use context cues to facilitate object detection: Helpful, but only moderately outperform better ~3-4% with context Hoiem et al, 2006 Rabinovich et al, 2007 Oliva & Torralba, 2007 Heitz & Koller, 2008 Desai et al, 2009 Divvala et al, 2009 without context Murphy et al, 2003 Shotton et al, 2006 Harzallah et al, 2009 Li, Socher & Fei-Fei, 2009 Marszalek et al, 2009 Bao & Savarese, 2010 Viola & Jones, 2001 Lampert et al,
17 Context in Computer Vision Previous work Use context cues to facilitate object detection: Our approach Two challenging tasks serve as mutual context of each other: With mutual context: Helpful, but only moderately outperform better ~3-4% with context Hoiem et al, 2006 Rabinovich et al, 2007 Oliva & Torralba, 2007 Heitz & Koller, 2008 Desai et al, 2009 Divvala et al, 2009 without context Murphy et al, 2003 Shotton et al, 2006 Harzallah et al, 2009 Li, Socher & Fei-Fei, 2009 Marszalek et al, 2009 Bao & Savarese, 2010 Without context: 17
18 Outline Background and Intuition Mutual Context of Object and Human Pose Model Representation Model Learning Model Inference Experiments Conclusion 18









19 Mutual Context Model Representation A: Activity A O: H: Tennis forehand Tennis racket Croquet shot Croquet mallet Volleyball smash Volleyball Object O P 1 Human pose H P 2 Body parts P N Intra-class variations More than one H for each A; Unobserved during training. f O f1 f2 fn Image evidence P: l P : location; θ P : orientation; s P : scale. f: Shape context. [Belongie et al, 2002] 19
20 Mutual Context Model Representation ψ e( AO, ), ψ e( AH, ), ψ e( OH, ): Frequency of co-occurrence between A, O, and H. ψ e ( AH, ) ψ e ( AO, ) H ψ e( OH, ) O A Markov Random Field Ψ= wψ e e e E Clique weight Clique potential P 1 P 2 P N f O f 1 f 2 f N 20
21 Mutual Context Model Representation ψ e( AO, ), ψ e( AH, ), ψ e( OH, ): Frequency of co-occurrence between A, O, and H. A Markov Random Field Ψ= wψ e e e E ψ e( OP, n), ψ e( H, Pn), ψ e( Pm, Pn) : Spatial relationship among object and body parts. bin ( lo lp ) bin( θo θp ) Ν( so sp ) n n n location orientation size O ψ ( OP, ) e n P 1 P 2 H ψ ( H, P ) e n ψ ( P, P ) e m n Clique weight P N Clique potential f O f 1 f 2 f N 21
22 Mutual Context Model Representation ψ e( AO, ), ψ e( AH, ), ψ e( OH, ): Frequency of co-occurrence between A, O, and H. A Markov Random Field Ψ= wψ e e e E ψ e( OP, n), ψ e( H, Pn), ψ e( Pm, Pn) : Spatial relationship among object and body parts. bin ( lo lp ) bin( θo θp ) Ν( so sp ) n n n O location orientation size ψ ( OP, ) Learn structural connectivity among the body parts and the object. e n P 1 P 2 H ψ ( H, P ) e n Obtained by structure learning ψ ( P, P ) e m n Clique weight P N Clique potential f O f 1 f 2 f N 22
23 Mutual Context Model Representation ψ e( AO, ), ψ e( AH, ), ψ e( OH, ): Frequency of co-occurrence between A, O, and H. A Markov Random Field Ψ= wψ e e e E ψ e( OP, n), ψ e( H, Pn), ψ e( Pm, Pn) : Spatial relationship among object and body parts. bin ( lo lp ) bin( θo θp ) Ν( so sp ) n n n location orientation size Learn structural connectivity among the body parts and the object. ψ e( O, f ) and ψ O e( Pn, fp n ): Discriminative part detection scores. Shape context + AdaBoost [Andriluka et al, 2009] [Belongie et al, 2002] [Viola & Jones, 2001] O ψ ( O, f ) e O H P 1 P 2 P N ψ ( P, f ) e n P n f O f1 f2 fn Clique weight Clique potential 23
24 Outline Background and Intuition Mutual Context of Object and Human Pose Model Representation Model Learning Model Inference Experiments Conclusion 24

25 Model Learning Ψ= wψ e e e E A H Input: O P 1 P 2 P N cricket shot cricket bowling Goals: f O f1 f2 fn Hidden human poses 25
26 Model Learning Ψ= wψ e e e E A H Input: O P 1 P 2 P N cricket shot cricket bowling Goals: f O f1 f2 fn Hidden human poses Structural connectivity 26
27 Model Learning Ψ= wψ e e e E A H Input: O P 1 P 2 P N cricket shot cricket bowling Goals: f O f1 f2 fn Hidden human poses Structural connectivity Potential parameters Potential weights 27
28 Model Learning Ψ= wψ e e e E A H Input: O P 1 P 2 P N cricket shot cricket bowling Goals: f O f1 f2 fn Hidden human poses Structural connectivity Potential parameters Potential weights Hidden variables Structure learning Parameter estimation 28


29 Model Learning Ψ= wψ e e e E O A H Approach: croquet shot P 1 P 2 P N Goals: f O f1 f2 fn Hidden human poses Structural connectivity Potential parameters Potential weights 29
30 Model Learning Ψ= wψ e e e E O A H P 1 P 2 P N Approach: Hill-climbing max E= { e} e wψ e e Joint density of the model ( E µ ) 2 2 2σ Gaussian priori of the edge number f O f1 f2 fn Goals: Hidden human poses Structural connectivity Potential parameters Potential weights 30
31 Model Learning Ψ= wψ e e e E O A H P 1 P 2 P N Approach: Maximum likelihood ψ ( AO, ) ψ e ( AH, ) e ψ ( H, P ) e n ψ ( OH e, ) ψ ( OP, ) ψ ( P, P ) e n e m n Goals: f O f1 f2 fn Hidden human poses Structural connectivity Potential parameters Potential weights Standard AdaBoost ψ ( O, f ) ψ ( P, f ) e O e n P n 31
32 Model Learning Ψ= wψ e e e E Goals: O A f O f1 f2 fn H P 1 P 2 P N Hidden human poses Structural connectivity Potential parameters Potential weights Approach: Max-margin learning 1 min wr + β ξi 2 w, ξ r 2 2 ( ) ( ) s.t. ir, where y r y c, w x w x 1 ξ i, ξ 0 i c i r i i i Notations x i : Potential values of the i-th image. w r : Potential weights of the r-th pose. y(r): Activity of the r-th pose. ξ i : A slack variable for the i-th image. i i 32










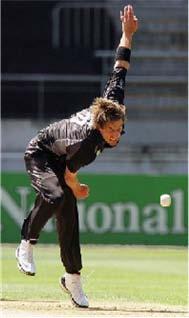



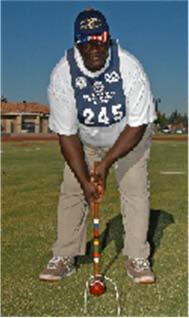

33 Learning Results Cricket defensive shot Cricket bowling Croquet shot 33
















34 Learning Results Tennis forehand Tennis serve Volleyball smash 34
35 Outline Background and Intuition Mutual Context of Object and Human Pose Model Representation Model Learning Model Inference Experiments Conclusion 35

36 Model Inference I The learned models 36


37 Model Inference I The learned models Head detection Compositional Inference Torso detection Ψ { P } ( * * A ) 1 H1 O1 1,,,, n n Layout of the object and body parts. [Chen et al, 2007] Tennis racket detection 37
38 Model Inference I The learned models Output * * Ψ A1 H1 O1 { P1, } Ψ A, H, O *,{ P *, } ( ),,, n n ( ) K K K Kn n 38
39 Outline Background and Intuition Mutual Context of Object and Human Pose Model Representation Model Learning Model Inference Experiments Conclusion 39
40 Dataset and Experiment Setup Sport data set: 6 classes 180 training (supervised with object and part locations) & 120 testing images Tasks: Object detection; Pose estimation; Cricket defensive shot Cricket bowling Croquet shot Activity classification. Tennis forehand Tennis serve Volleyball smash [Gupta et al, 2009] 40
41 Dataset and Experiment Setup Sport data set: 6 classes 180 training (supervised with object and part locations) & 120 testing images Tasks: Object detection; Pose estimation; Cricket defensive shot Cricket bowling Croquet shot Activity classification. Tennis forehand Tennis serve Volleyball smash [Gupta et al, 2009] 41

![2009] Pedestrian context [Dalal & Triggs, 2006] Our](/docs-images/88/115006134/images/42-2.jpg "Method Precision 0.6 0.")

42 Object Detection Results Valid region Cricket bat Cricket ball Sliding window [Andriluka et al, 2009] Pedestrian context [Dalal & Triggs, 2006] Our Method Precision Recall Croquet mallet Tennis racket Volleyball Precision Recall 42



43 Object Detection Results Sliding window Pedestrian context Our method 1 Cricket ball Small object Precision Recall Background clutter Precision Volleyball Recall 43 43
44 Dataset and Experiment Setup Sport data set: 6 classes 180 training & 120 testing images Tasks: Object detection; Pose estimation; Cricket defensive shot Cricket bowling Croquet shot Activity classification. Tennis forehand Tennis serve Volleyball smash [Gupta et al, 2009] 44
45 Human Pose Estimation Results Method Torso Upper Leg Lower Leg Upper Arm Lower Arm Head Ramanan, 2006 Andriluka et al, 2009 Our full model



46 Human Pose Estimation Results Method Torso Upper Leg Lower Leg Upper Arm Lower Arm Head Ramanan, 2006 Andriluka et al, 2009 Our full model Tennis serve model Our estimation result Andriluka et al, 2009 Volleyball smash model Our estimation Andriluka result et al,



47 Human Pose Estimation Results Method Torso Upper Leg Lower Leg Upper Arm Lower Arm Head Ramanan, 2006 Andriluka et al, 2009 Our full model One pose per class Estimation result Estimation result Estimation result Estimation result 47
48 Dataset and Experiment Setup Sport data set: 6 classes 180 training & 120 testing images Tasks: Object detection; Pose estimation; Cricket defensive shot Cricket bowling Croquet shot Activity classification. Tennis forehand Tennis serve Volleyball smash [Gupta et al, 2009] 48










49 Activity Classification Results Classification accuracy No scene information 83.3% 78.9% Scene is critical!! 52.5% Cricket shot Tennis forehand 0.5 model Our model Gupta et al, 2009 Gupta et al, 2009 Bag-of- Words Bag-of-words SIFT+SVM 49



50 Conclusion Human-Object Interaction Grouplet representation Vs. Mutual context model Next Steps Pose estimation & Object detection on PPMI images. Modeling multiple objects and humans. 50



51 Acknowledgment Stanford Vision Lab reviewers: Barry Chai ( ) Juan Carlos Niebles Hao Su Silvio Savarese, U. Michigan Anonymous reviewers 51
52 52



53 Human-Object Interaction Holistic image based classification Detailed understanding and reasoning Human pose estimation Object detection How to beat this??? Head Tennis racket Torso 53
54 Mutual Context Model Representation human-object interaction activity A Hierarchical representation of images human pose object body parts image patches O H P 1 P 2 P N f O f1 f2 fn 54
Pictorial Structures Revisited: People Detection and Articulated Pose Estimation. Department of Computer Science TU Darmstadt
 Pictorial Structures Revisited: People Detection and Articulated Pose Estimation Mykhaylo Andriluka Stefan Roth Bernt Schiele Department of Computer Science TU Darmstadt Generic model for human detection
Pictorial Structures Revisited: People Detection and Articulated Pose Estimation Mykhaylo Andriluka Stefan Roth Bernt Schiele Department of Computer Science TU Darmstadt Generic model for human detection
Grouplet: A Structured Image Representation for Recognizing Human and Object Interactions
 Grouplet: A Structured Image Representation for Recognizing Human and Object Interactions Bangpeng Yao Li Fei-Fei Computer Science Department, Stanford University, USA {bangpeng,feifeili}@cs.stanford.edu
Grouplet: A Structured Image Representation for Recognizing Human and Object Interactions Bangpeng Yao Li Fei-Fei Computer Science Department, Stanford University, USA {bangpeng,feifeili}@cs.stanford.edu
Lecture 13 Visual recognition
 Lecture 13 Visual recognition Announcements Silvio Savarese Lecture 13-20-Feb-14 Lecture 13 Visual recognition Object classification bag of words models Discriminative methods Generative methods Object
Lecture 13 Visual recognition Announcements Silvio Savarese Lecture 13-20-Feb-14 Lecture 13 Visual recognition Object classification bag of words models Discriminative methods Generative methods Object
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
Hidden Markov Models
 10-601 Introduction to Machine Learning Machine Learning Department School of Computer Science Carnegie Mellon University Hidden Markov Models Matt Gormley Lecture 22 April 2, 2018 1 Reminders Homework
10-601 Introduction to Machine Learning Machine Learning Department School of Computer Science Carnegie Mellon University Hidden Markov Models Matt Gormley Lecture 22 April 2, 2018 1 Reminders Homework
Distinguish between different types of scenes. Matching human perception Understanding the environment
 Scene Recognition Adriana Kovashka UTCS, PhD student Problem Statement Distinguish between different types of scenes Applications Matching human perception Understanding the environment Indexing of images
Scene Recognition Adriana Kovashka UTCS, PhD student Problem Statement Distinguish between different types of scenes Applications Matching human perception Understanding the environment Indexing of images
Introduction to Discriminative Machine Learning
 Introduction to Discriminative Machine Learning Yang Wang Vision & Media Lab Simon Fraser University CRV Tutorial, Kelowna May 24, 2009 Hand-written Digit Recognition [Belongie et al. PAMI 2002] 2 Hand-written
Introduction to Discriminative Machine Learning Yang Wang Vision & Media Lab Simon Fraser University CRV Tutorial, Kelowna May 24, 2009 Hand-written Digit Recognition [Belongie et al. PAMI 2002] 2 Hand-written
Global Scene Representations. Tilke Judd
 Global Scene Representations Tilke Judd Papers Oliva and Torralba [2001] Fei Fei and Perona [2005] Labzebnik, Schmid and Ponce [2006] Commonalities Goal: Recognize natural scene categories Extract features
Global Scene Representations Tilke Judd Papers Oliva and Torralba [2001] Fei Fei and Perona [2005] Labzebnik, Schmid and Ponce [2006] Commonalities Goal: Recognize natural scene categories Extract features
Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Discriminative part-based models. Many slides based on P. Felzenszwalb
 More sliding window detection: ti Discriminative part-based models Many slides based on P. Felzenszwalb Challenge: Generic object detection Pedestrian detection Features: Histograms of oriented gradients
More sliding window detection: ti Discriminative part-based models Many slides based on P. Felzenszwalb Challenge: Generic object detection Pedestrian detection Features: Histograms of oriented gradients
A Discriminatively Trained, Multiscale, Deformable Part Model
 A Discriminatively Trained, Multiscale, Deformable Part Model P. Felzenszwalb, D. McAllester, and D. Ramanan Edward Hsiao 16-721 Learning Based Methods in Vision February 16, 2009 Images taken from P.
A Discriminatively Trained, Multiscale, Deformable Part Model P. Felzenszwalb, D. McAllester, and D. Ramanan Edward Hsiao 16-721 Learning Based Methods in Vision February 16, 2009 Images taken from P.
Bayesian Networks (Part I)
") 10-601 Introduction to Machine Learning Machine Learning Department School of Computer Science Carnegie Mellon University Bayesian Networks (Part I) Graphical Model Readings: Murphy 10 10.2.1 Bishop 8.1,
10-601 Introduction to Machine Learning Machine Learning Department School of Computer Science Carnegie Mellon University Bayesian Networks (Part I) Graphical Model Readings: Murphy 10 10.2.1 Bishop 8.1,
Lab 12: Structured Prediction
 December 4, 2014 Lecture plan structured perceptron application: confused messages application: dependency parsing structured SVM Class review: from modelization to classification What does learning mean?
December 4, 2014 Lecture plan structured perceptron application: confused messages application: dependency parsing structured SVM Class review: from modelization to classification What does learning mean?
Detecting Humans via Their Pose
 Detecting Humans via Their Pose Alessandro Bissacco Computer Science Department University of California, Los Angeles Los Angeles, CA 90095 bissacco@cs.ucla.edu Ming-Hsuan Yang Honda Research Institute
Detecting Humans via Their Pose Alessandro Bissacco Computer Science Department University of California, Los Angeles Los Angeles, CA 90095 bissacco@cs.ucla.edu Ming-Hsuan Yang Honda Research Institute
Object Detection Grammars
 Object Detection Grammars Pedro F. Felzenszwalb and David McAllester February 11, 2010 1 Introduction We formulate a general grammar model motivated by the problem of object detection in computer vision.
Object Detection Grammars Pedro F. Felzenszwalb and David McAllester February 11, 2010 1 Introduction We formulate a general grammar model motivated by the problem of object detection in computer vision.
Use Bin-Ratio Information for Category and Scene Classification
 Use Bin-Ratio Information for Category and Scene Classification Nianhua Xie 1,2, Haibin Ling 2, Weiming Hu 1, Xiaoqin Zhang 1 1 National Laboratory of Pattern Recognition, Institute of Automation, CAS,
Use Bin-Ratio Information for Category and Scene Classification Nianhua Xie 1,2, Haibin Ling 2, Weiming Hu 1, Xiaoqin Zhang 1 1 National Laboratory of Pattern Recognition, Institute of Automation, CAS,
Introduction To Graphical Models
 Peter Gehler Introduction to Graphical Models Introduction To Graphical Models Peter V. Gehler Max Planck Institute for Intelligent Systems, Tübingen, Germany ENS/INRIA Summer School, Paris, July 2013
Peter Gehler Introduction to Graphical Models Introduction To Graphical Models Peter V. Gehler Max Planck Institute for Intelligent Systems, Tübingen, Germany ENS/INRIA Summer School, Paris, July 2013
Graphical Object Models for Detection and Tracking
 Graphical Object Models for Detection and Tracking (ls@cs.brown.edu) Department of Computer Science Brown University Joined work with: -Ying Zhu, Siemens Corporate Research, Princeton, NJ -DorinComaniciu,
Graphical Object Models for Detection and Tracking (ls@cs.brown.edu) Department of Computer Science Brown University Joined work with: -Ying Zhu, Siemens Corporate Research, Princeton, NJ -DorinComaniciu,
Action Attribute Detection from Sports Videos with Contextual Constraints
 YU, ET AL: ACTION ATTRIBUTE DETECTION FROM SPORTS VIDEOS 1 Action Attribute Detection from Sports Videos with Contextual Constraints Xiaodong Yu 1 xiaodong_yu@cable.comcast.com Ching Lik Teo 2 cteo@cs.umd.edu
YU, ET AL: ACTION ATTRIBUTE DETECTION FROM SPORTS VIDEOS 1 Action Attribute Detection from Sports Videos with Contextual Constraints Xiaodong Yu 1 xiaodong_yu@cable.comcast.com Ching Lik Teo 2 cteo@cs.umd.edu
CS4495/6495 Introduction to Computer Vision. 8C-L3 Support Vector Machines
 CS4495/6495 Introduction to Computer Vision 8C-L3 Support Vector Machines Discriminative classifiers Discriminative classifiers find a division (surface) in feature space that separates the classes Several
CS4495/6495 Introduction to Computer Vision 8C-L3 Support Vector Machines Discriminative classifiers Discriminative classifiers find a division (surface) in feature space that separates the classes Several
Recurrent Autoregressive Networks for Online Multi-Object Tracking. Presented By: Ishan Gupta
 Recurrent Autoregressive Networks for Online Multi-Object Tracking Presented By: Ishan Gupta Outline Multi Object Tracking Recurrent Autoregressive Networks (RANs) RANs for Online Tracking Other State
Recurrent Autoregressive Networks for Online Multi-Object Tracking Presented By: Ishan Gupta Outline Multi Object Tracking Recurrent Autoregressive Networks (RANs) RANs for Online Tracking Other State
38 1 Vol. 38, No ACTA AUTOMATICA SINICA January, Bag-of-phrases.. Image Representation Using Bag-of-phrases
 38 1 Vol. 38, No. 1 2012 1 ACTA AUTOMATICA SINICA January, 2012 Bag-of-phrases 1, 2 1 1 1, Bag-of-words,,, Bag-of-words, Bag-of-phrases, Bag-of-words DOI,, Bag-of-words, Bag-of-phrases, SIFT 10.3724/SP.J.1004.2012.00046
38 1 Vol. 38, No. 1 2012 1 ACTA AUTOMATICA SINICA January, 2012 Bag-of-phrases 1, 2 1 1 1, Bag-of-words,,, Bag-of-words, Bag-of-phrases, Bag-of-words DOI,, Bag-of-words, Bag-of-phrases, SIFT 10.3724/SP.J.1004.2012.00046
Loss Functions and Optimization. Lecture 3-1
 Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative Assignment 1 is released: http://cs231n.github.io/assignments2017/assignment1/ Due Thursday April 20, 11:59pm on Canvas (Extending
Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative Assignment 1 is released: http://cs231n.github.io/assignments2017/assignment1/ Due Thursday April 20, 11:59pm on Canvas (Extending
Hidden Markov Models
 10-601 Introduction to Machine Learning Machine Learning Department School of Computer Science Carnegie Mellon University Hidden Markov Models Matt Gormley Lecture 19 Nov. 5, 2018 1 Reminders Homework
10-601 Introduction to Machine Learning Machine Learning Department School of Computer Science Carnegie Mellon University Hidden Markov Models Matt Gormley Lecture 19 Nov. 5, 2018 1 Reminders Homework
Graph Cut based Inference with Co-occurrence Statistics. Ľubor Ladický, Chris Russell, Pushmeet Kohli, Philip Torr
 Graph Cut based Inference with Co-occurrence Statistics Ľubor Ladický, Chris Russell, Pushmeet Kohli, Philip Torr Image labelling Problems Assign a label to each image pixel Geometry Estimation Image Denoising
Graph Cut based Inference with Co-occurrence Statistics Ľubor Ladický, Chris Russell, Pushmeet Kohli, Philip Torr Image labelling Problems Assign a label to each image pixel Geometry Estimation Image Denoising
Dynamic Data Modeling, Recognition, and Synthesis. Rui Zhao Thesis Defense Advisor: Professor Qiang Ji
 Dynamic Data Modeling, Recognition, and Synthesis Rui Zhao Thesis Defense Advisor: Professor Qiang Ji Contents Introduction Related Work Dynamic Data Modeling & Analysis Temporal localization Insufficient
Dynamic Data Modeling, Recognition, and Synthesis Rui Zhao Thesis Defense Advisor: Professor Qiang Ji Contents Introduction Related Work Dynamic Data Modeling & Analysis Temporal localization Insufficient
Mining Motion Atoms and Phrases for Complex Action Recognition
 Mining Motion Atoms and Phrases for Complex Action Recognition LiMin Wang 1,2, Yu Qiao 2, and Xiaoou Tang 1,2 1 Department of Information Engineering, The Chinese University of Hong Kong 2 Shenzhen key
Mining Motion Atoms and Phrases for Complex Action Recognition LiMin Wang 1,2, Yu Qiao 2, and Xiaoou Tang 1,2 1 Department of Information Engineering, The Chinese University of Hong Kong 2 Shenzhen key
INTRODUCTION HIERARCHY OF CLASSIFIERS
 INTRODUCTION DETECTION AND FOLDED HIERARCHIES FOR EFFICIENT DONALD GEMAN JOINT WORK WITH FRANCOIS FLEURET 2 / 35 INTRODUCTION DETECTION (CONT.) HIERARCHY OF CLASSIFIERS...... Advantages - Highly efficient
INTRODUCTION DETECTION AND FOLDED HIERARCHIES FOR EFFICIENT DONALD GEMAN JOINT WORK WITH FRANCOIS FLEURET 2 / 35 INTRODUCTION DETECTION (CONT.) HIERARCHY OF CLASSIFIERS...... Advantages - Highly efficient
Kernel Methods in Computer Vision
 Kernel Methods in Computer Vision Christoph Lampert Max Planck Institute for Biological Cybernetics, Tübingen Matthew Blaschko MPI Tübingen and University of Oxford June 2, 29 Overview... 14: 15: Introduction
Kernel Methods in Computer Vision Christoph Lampert Max Planck Institute for Biological Cybernetics, Tübingen Matthew Blaschko MPI Tübingen and University of Oxford June 2, 29 Overview... 14: 15: Introduction
Estimating Latent Variable Graphical Models with Moments and Likelihoods
 Estimating Latent Variable Graphical Models with Moments and Likelihoods Arun Tejasvi Chaganty Percy Liang Stanford University June 18, 2014 Chaganty, Liang (Stanford University) Moments and Likelihoods
Estimating Latent Variable Graphical Models with Moments and Likelihoods Arun Tejasvi Chaganty Percy Liang Stanford University June 18, 2014 Chaganty, Liang (Stanford University) Moments and Likelihoods
A New Unsupervised Event Detector for Non-Intrusive Load Monitoring
 A New Unsupervised Event Detector for Non-Intrusive Load Monitoring GlobalSIP 2015, 14th Dec. Benjamin Wild, Karim Said Barsim, and Bin Yang Institute of Signal Processing and System Theory of,, Germany
A New Unsupervised Event Detector for Non-Intrusive Load Monitoring GlobalSIP 2015, 14th Dec. Benjamin Wild, Karim Said Barsim, and Bin Yang Institute of Signal Processing and System Theory of,, Germany
Beyond Spatial Pyramids
 Beyond Spatial Pyramids Receptive Field Learning for Pooled Image Features Yangqing Jia 1 Chang Huang 2 Trevor Darrell 1 1 UC Berkeley EECS 2 NEC Labs America Goal coding pooling Bear Analysis of the pooling
Beyond Spatial Pyramids Receptive Field Learning for Pooled Image Features Yangqing Jia 1 Chang Huang 2 Trevor Darrell 1 1 UC Berkeley EECS 2 NEC Labs America Goal coding pooling Bear Analysis of the pooling
Kernel Density Topic Models: Visual Topics Without Visual Words
 Kernel Density Topic Models: Visual Topics Without Visual Words Konstantinos Rematas K.U. Leuven ESAT-iMinds krematas@esat.kuleuven.be Mario Fritz Max Planck Institute for Informatics mfrtiz@mpi-inf.mpg.de
Kernel Density Topic Models: Visual Topics Without Visual Words Konstantinos Rematas K.U. Leuven ESAT-iMinds krematas@esat.kuleuven.be Mario Fritz Max Planck Institute for Informatics mfrtiz@mpi-inf.mpg.de
Feedback Loop between High Level Semantics and Low Level Vision
 Feedback Loop between High Level Semantics and Low Level Vision Varun K. Nagaraja Vlad I. Morariu Larry S. Davis {varun,morariu,lsd}@umiacs.umd.edu University of Maryland, College Park, MD, USA. Abstract.
Feedback Loop between High Level Semantics and Low Level Vision Varun K. Nagaraja Vlad I. Morariu Larry S. Davis {varun,morariu,lsd}@umiacs.umd.edu University of Maryland, College Park, MD, USA. Abstract.
Robotics 2 AdaBoost for People and Place Detection
 Robotics 2 AdaBoost for People and Place Detection Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard v.1.0, Kai Arras, Oct 09, including material by Luciano Spinello and Oscar Martinez Mozos
Robotics 2 AdaBoost for People and Place Detection Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard v.1.0, Kai Arras, Oct 09, including material by Luciano Spinello and Oscar Martinez Mozos
ECE 6504: Advanced Topics in Machine Learning Probabilistic Graphical Models and Large-Scale Learning
 ECE 6504: Advanced Topics in Machine Learning Probabilistic Graphical Models and Large-Scale Learning Topics Markov Random Fields: Representation Conditional Random Fields Log-Linear Models Readings: KF
ECE 6504: Advanced Topics in Machine Learning Probabilistic Graphical Models and Large-Scale Learning Topics Markov Random Fields: Representation Conditional Random Fields Log-Linear Models Readings: KF
CS230: Lecture 5 Advanced topics in Object Detection
 CS230: Lecture 5 Advanced topics in Object Detection Stanford University Today s outline We will learn: - the Intuition behind object detection methods - a series of computer vision papers I. Object detection
CS230: Lecture 5 Advanced topics in Object Detection Stanford University Today s outline We will learn: - the Intuition behind object detection methods - a series of computer vision papers I. Object detection
Lecture : Probabilistic Machine Learning
 Lecture : Probabilistic Machine Learning Riashat Islam Reasoning and Learning Lab McGill University September 11, 2018 ML : Many Methods with Many Links Modelling Views of Machine Learning Machine Learning
Lecture : Probabilistic Machine Learning Riashat Islam Reasoning and Learning Lab McGill University September 11, 2018 ML : Many Methods with Many Links Modelling Views of Machine Learning Machine Learning
Deep Learning Srihari. Deep Belief Nets. Sargur N. Srihari
 Deep Belief Nets Sargur N. Srihari srihari@cedar.buffalo.edu Topics 1. Boltzmann machines 2. Restricted Boltzmann machines 3. Deep Belief Networks 4. Deep Boltzmann machines 5. Boltzmann machines for continuous
Deep Belief Nets Sargur N. Srihari srihari@cedar.buffalo.edu Topics 1. Boltzmann machines 2. Restricted Boltzmann machines 3. Deep Belief Networks 4. Deep Boltzmann machines 5. Boltzmann machines for continuous
Beyond Active Noun Tagging: Modeling Contextual Interactions for Multi-Class Active Learning
 Beyond Active Noun Tagging: Modeling Contextual Interactions for Multi-Class Active Learning Behjat Siddiquie Department of Computer Science University of Maryland, College Park behjat@cs.umd.edu Abhinav
Beyond Active Noun Tagging: Modeling Contextual Interactions for Multi-Class Active Learning Behjat Siddiquie Department of Computer Science University of Maryland, College Park behjat@cs.umd.edu Abhinav
End-to-End Learning of Deformable Mixture of Parts and Deep Convolutional Neural Networks for Human Pose Estimation
 End-to-End Learning of Deformable Mixture of Parts and Deep Convolutional Neural Networks for Human Pose Estimation Wei Yang, Wanli Ouyang, Hongsheng Li, and Xiaogang Wang Department of Electronic Engineering,
End-to-End Learning of Deformable Mixture of Parts and Deep Convolutional Neural Networks for Human Pose Estimation Wei Yang, Wanli Ouyang, Hongsheng Li, and Xiaogang Wang Department of Electronic Engineering,
Brief Introduction of Machine Learning Techniques for Content Analysis
 1 Brief Introduction of Machine Learning Techniques for Content Analysis Wei-Ta Chu 2008/11/20 Outline 2 Overview Gaussian Mixture Model (GMM) Hidden Markov Model (HMM) Support Vector Machine (SVM) Overview
1 Brief Introduction of Machine Learning Techniques for Content Analysis Wei-Ta Chu 2008/11/20 Outline 2 Overview Gaussian Mixture Model (GMM) Hidden Markov Model (HMM) Support Vector Machine (SVM) Overview
Sum-Product Networks: A New Deep Architecture
 Sum-Product Networks: A New Deep Architecture Pedro Domingos Dept. Computer Science & Eng. University of Washington Joint work with Hoifung Poon 1 Graphical Models: Challenges Bayesian Network Markov Network
Sum-Product Networks: A New Deep Architecture Pedro Domingos Dept. Computer Science & Eng. University of Washington Joint work with Hoifung Poon 1 Graphical Models: Challenges Bayesian Network Markov Network
Dimension Reduction (PCA, ICA, CCA, FLD,
 Dimension Reduction (PCA, ICA, CCA, FLD, Topic Models) Yi Zhang 10-701, Machine Learning, Spring 2011 April 6 th, 2011 Parts of the PCA slides are from previous 10-701 lectures 1 Outline Dimension reduction
Dimension Reduction (PCA, ICA, CCA, FLD, Topic Models) Yi Zhang 10-701, Machine Learning, Spring 2011 April 6 th, 2011 Parts of the PCA slides are from previous 10-701 lectures 1 Outline Dimension reduction
Energy Based Models. Stefano Ermon, Aditya Grover. Stanford University. Lecture 13
 Energy Based Models Stefano Ermon, Aditya Grover Stanford University Lecture 13 Stefano Ermon, Aditya Grover (AI Lab) Deep Generative Models Lecture 13 1 / 21 Summary Story so far Representation: Latent
Energy Based Models Stefano Ermon, Aditya Grover Stanford University Lecture 13 Stefano Ermon, Aditya Grover (AI Lab) Deep Generative Models Lecture 13 1 / 21 Summary Story so far Representation: Latent
Collective Activity Detection using Hinge-loss Markov Random Fields
 Collective Activity Detection using Hinge-loss Markov Random Fields Ben London, Sameh Khamis, Stephen H. Bach, Bert Huang, Lise Getoor, Larry Davis University of Maryland College Park, MD 20742 {blondon,sameh,bach,bert,getoor,lsdavis}@cs.umd.edu
Collective Activity Detection using Hinge-loss Markov Random Fields Ben London, Sameh Khamis, Stephen H. Bach, Bert Huang, Lise Getoor, Larry Davis University of Maryland College Park, MD 20742 {blondon,sameh,bach,bert,getoor,lsdavis}@cs.umd.edu
CS839: Probabilistic Graphical Models. Lecture 7: Learning Fully Observed BNs. Theo Rekatsinas
 CS839: Probabilistic Graphical Models Lecture 7: Learning Fully Observed BNs Theo Rekatsinas 1 Exponential family: a basic building block For a numeric random variable X p(x ) =h(x)exp T T (x) A( ) = 1
CS839: Probabilistic Graphical Models Lecture 7: Learning Fully Observed BNs Theo Rekatsinas 1 Exponential family: a basic building block For a numeric random variable X p(x ) =h(x)exp T T (x) A( ) = 1
Conditional Random Field
 Introduction Linear-Chain General Specific Implementations Conclusions Corso di Elaborazione del Linguaggio Naturale Pisa, May, 2011 Introduction Linear-Chain General Specific Implementations Conclusions
Introduction Linear-Chain General Specific Implementations Conclusions Corso di Elaborazione del Linguaggio Naturale Pisa, May, 2011 Introduction Linear-Chain General Specific Implementations Conclusions
Outline. Spring It Introduction Representation. Markov Random Field. Conclusion. Conditional Independence Inference: Variable elimination
 Probabilistic Graphical Models COMP 790-90 Seminar Spring 2011 The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Outline It Introduction ti Representation Bayesian network Conditional Independence Inference:
Probabilistic Graphical Models COMP 790-90 Seminar Spring 2011 The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Outline It Introduction ti Representation Bayesian network Conditional Independence Inference:
Boosting: Algorithms and Applications
 Boosting: Algorithms and Applications Lecture 11, ENGN 4522/6520, Statistical Pattern Recognition and Its Applications in Computer Vision ANU 2 nd Semester, 2008 Chunhua Shen, NICTA/RSISE Boosting Definition
Boosting: Algorithms and Applications Lecture 11, ENGN 4522/6520, Statistical Pattern Recognition and Its Applications in Computer Vision ANU 2 nd Semester, 2008 Chunhua Shen, NICTA/RSISE Boosting Definition
Optical Flow, Motion Segmentation, Feature Tracking
 BIL 719 - Computer Vision May 21, 2014 Optical Flow, Motion Segmentation, Feature Tracking Aykut Erdem Dept. of Computer Engineering Hacettepe University Motion Optical Flow Motion Segmentation Feature
BIL 719 - Computer Vision May 21, 2014 Optical Flow, Motion Segmentation, Feature Tracking Aykut Erdem Dept. of Computer Engineering Hacettepe University Motion Optical Flow Motion Segmentation Feature
Image Analysis. PCA and Eigenfaces
 Image Analysis PCA and Eigenfaces Christophoros Nikou cnikou@cs.uoi.gr Images taken from: D. Forsyth and J. Ponce. Computer Vision: A Modern Approach, Prentice Hall, 2003. Computer Vision course by Svetlana
Image Analysis PCA and Eigenfaces Christophoros Nikou cnikou@cs.uoi.gr Images taken from: D. Forsyth and J. Ponce. Computer Vision: A Modern Approach, Prentice Hall, 2003. Computer Vision course by Svetlana
Robotics 2. AdaBoost for People and Place Detection. Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard
 Robotics 2 AdaBoost for People and Place Detection Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard v.1.1, Kai Arras, Jan 12, including material by Luciano Spinello and Oscar Martinez Mozos
Robotics 2 AdaBoost for People and Place Detection Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard v.1.1, Kai Arras, Jan 12, including material by Luciano Spinello and Oscar Martinez Mozos
The state of the art and beyond
 Feature Detectors and Descriptors The state of the art and beyond Local covariant detectors and descriptors have been successful in many applications Registration Stereo vision Motion estimation Matching
Feature Detectors and Descriptors The state of the art and beyond Local covariant detectors and descriptors have been successful in many applications Registration Stereo vision Motion estimation Matching
Hidden Markov Models Hamid R. Rabiee
 Hidden Markov Models Hamid R. Rabiee 1 Hidden Markov Models (HMMs) In the previous slides, we have seen that in many cases the underlying behavior of nature could be modeled as a Markov process. However
Hidden Markov Models Hamid R. Rabiee 1 Hidden Markov Models (HMMs) In the previous slides, we have seen that in many cases the underlying behavior of nature could be modeled as a Markov process. However
A Tutorial on Learning with Bayesian Networks
 A utorial on Learning with Bayesian Networks David Heckerman Presented by: Krishna V Chengavalli April 21 2003 Outline Introduction Different Approaches Bayesian Networks Learning Probabilities and Structure
A utorial on Learning with Bayesian Networks David Heckerman Presented by: Krishna V Chengavalli April 21 2003 Outline Introduction Different Approaches Bayesian Networks Learning Probabilities and Structure
COURSE INTRODUCTION. J. Elder CSE 6390/PSYC 6225 Computational Modeling of Visual Perception
 COURSE INTRODUCTION COMPUTATIONAL MODELING OF VISUAL PERCEPTION 2 The goal of this course is to provide a framework and computational tools for modeling visual inference, motivated by interesting examples
COURSE INTRODUCTION COMPUTATIONAL MODELING OF VISUAL PERCEPTION 2 The goal of this course is to provide a framework and computational tools for modeling visual inference, motivated by interesting examples
Recap: edge detection. Source: D. Lowe, L. Fei-Fei
 Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
10 : HMM and CRF. 1 Case Study: Supervised Part-of-Speech Tagging
 10-708: Probabilistic Graphical Models 10-708, Spring 2018 10 : HMM and CRF Lecturer: Kayhan Batmanghelich Scribes: Ben Lengerich, Michael Kleyman 1 Case Study: Supervised Part-of-Speech Tagging We will
10-708: Probabilistic Graphical Models 10-708, Spring 2018 10 : HMM and CRF Lecturer: Kayhan Batmanghelich Scribes: Ben Lengerich, Michael Kleyman 1 Case Study: Supervised Part-of-Speech Tagging We will
Shared Segmentation of Natural Scenes. Dependent Pitman-Yor Processes
 Shared Segmentation of Natural Scenes using Dependent Pitman-Yor Processes Erik Sudderth & Michael Jordan University of California, Berkeley Parsing Visual Scenes sky skyscraper sky dome buildings trees
Shared Segmentation of Natural Scenes using Dependent Pitman-Yor Processes Erik Sudderth & Michael Jordan University of California, Berkeley Parsing Visual Scenes sky skyscraper sky dome buildings trees
CITS 4402 Computer Vision
 CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh Lecture 06 Object Recognition Objectives To understand the concept of image based object recognition To learn how to match images
CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh Lecture 06 Object Recognition Objectives To understand the concept of image based object recognition To learn how to match images
ECE521 week 3: 23/26 January 2017
 ECE521 week 3: 23/26 January 2017 Outline Probabilistic interpretation of linear regression - Maximum likelihood estimation (MLE) - Maximum a posteriori (MAP) estimation Bias-variance trade-off Linear
ECE521 week 3: 23/26 January 2017 Outline Probabilistic interpretation of linear regression - Maximum likelihood estimation (MLE) - Maximum a posteriori (MAP) estimation Bias-variance trade-off Linear
Mathematical Formulation of Our Example
 Mathematical Formulation of Our Example We define two binary random variables: open and, where is light on or light off. Our question is: What is? Computer Vision 1 Combining Evidence Suppose our robot
Mathematical Formulation of Our Example We define two binary random variables: open and, where is light on or light off. Our question is: What is? Computer Vision 1 Combining Evidence Suppose our robot
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Oct 2009 PCA and applications Probability and classification Admin Assignment 1 grades back shortly. Assignment 2, parts 1 and 2 due October 22 at 11:00am
Introduction to Computer Vision Michael J. Black Oct 2009 PCA and applications Probability and classification Admin Assignment 1 grades back shortly. Assignment 2, parts 1 and 2 due October 22 at 11:00am
Hidden CRFs for Human Activity Classification from RGBD Data
 H Hidden s for Human from RGBD Data Avi Singh & Ankit Goyal IIT-Kanpur CS679: Machine Learning for Computer Vision April 13, 215 Overview H 1 2 3 H 4 5 6 7 Statement H Input An RGBD video with a human
H Hidden s for Human from RGBD Data Avi Singh & Ankit Goyal IIT-Kanpur CS679: Machine Learning for Computer Vision April 13, 215 Overview H 1 2 3 H 4 5 6 7 Statement H Input An RGBD video with a human
Probabilistic Graphical Models: MRFs and CRFs. CSE628: Natural Language Processing Guest Lecturer: Veselin Stoyanov
 Probabilistic Graphical Models: MRFs and CRFs CSE628: Natural Language Processing Guest Lecturer: Veselin Stoyanov Why PGMs? PGMs can model joint probabilities of many events. many techniques commonly
Probabilistic Graphical Models: MRFs and CRFs CSE628: Natural Language Processing Guest Lecturer: Veselin Stoyanov Why PGMs? PGMs can model joint probabilities of many events. many techniques commonly
Part 4: Conditional Random Fields
 Part 4: Conditional Random Fields Sebastian Nowozin and Christoph H. Lampert Colorado Springs, 25th June 2011 1 / 39 Problem (Probabilistic Learning) Let d(y x) be the (unknown) true conditional distribution.
Part 4: Conditional Random Fields Sebastian Nowozin and Christoph H. Lampert Colorado Springs, 25th June 2011 1 / 39 Problem (Probabilistic Learning) Let d(y x) be the (unknown) true conditional distribution.
Intelligent Systems (AI-2)
") Intelligent Systems (AI-2) Computer Science cpsc422, Lecture 19 Oct, 23, 2015 Slide Sources Raymond J. Mooney University of Texas at Austin D. Koller, Stanford CS - Probabilistic Graphical Models D. Page,
Intelligent Systems (AI-2) Computer Science cpsc422, Lecture 19 Oct, 23, 2015 Slide Sources Raymond J. Mooney University of Texas at Austin D. Koller, Stanford CS - Probabilistic Graphical Models D. Page,
Recognition and Classification in Images and Video
 Recognition and Classification in Images and Video 203.4780 http://www.cs.haifa.ac.il/~rita/visual_recog_course/visual%20recognition%20spring%202014.htm Introduction The course is based on UT-Austin course:
Recognition and Classification in Images and Video 203.4780 http://www.cs.haifa.ac.il/~rita/visual_recog_course/visual%20recognition%20spring%202014.htm Introduction The course is based on UT-Austin course:
Markov Random Fields for Computer Vision (Part 1)
") Markov Random Fields for Computer Vision (Part 1) Machine Learning Summer School (MLSS 2011) Stephen Gould stephen.gould@anu.edu.au Australian National University 13 17 June, 2011 Stephen Gould 1/23 Pixel
Markov Random Fields for Computer Vision (Part 1) Machine Learning Summer School (MLSS 2011) Stephen Gould stephen.gould@anu.edu.au Australian National University 13 17 June, 2011 Stephen Gould 1/23 Pixel
CLASSIFICATION NAIVE BAYES. NIKOLA MILIKIĆ UROŠ KRČADINAC
 CLASSIFICATION NAIVE BAYES NIKOLA MILIKIĆ nikola.milikic@fon.bg.ac.rs UROŠ KRČADINAC uros@krcadinac.com WHAT IS CLASSIFICATION? A supervised learning task of determining the class of an instance; it is
CLASSIFICATION NAIVE BAYES NIKOLA MILIKIĆ nikola.milikic@fon.bg.ac.rs UROŠ KRČADINAC uros@krcadinac.com WHAT IS CLASSIFICATION? A supervised learning task of determining the class of an instance; it is
The Bayes classifier
 The Bayes classifier Consider where is a random vector in is a random variable (depending on ) Let be a classifier with probability of error/risk given by The Bayes classifier (denoted ) is the optimal
The Bayes classifier Consider where is a random vector in is a random variable (depending on ) Let be a classifier with probability of error/risk given by The Bayes classifier (denoted ) is the optimal
Using Both Latent and Supervised Shared Topics for Multitask Learning
 Using Both Latent and Supervised Shared Topics for Multitask Learning Ayan Acharya, Aditya Rawal, Raymond J. Mooney, Eduardo R. Hruschka UT Austin, Dept. of ECE September 21, 2013 Problem Definition An
Using Both Latent and Supervised Shared Topics for Multitask Learning Ayan Acharya, Aditya Rawal, Raymond J. Mooney, Eduardo R. Hruschka UT Austin, Dept. of ECE September 21, 2013 Problem Definition An
Intelligent Systems (AI-2)
") Intelligent Systems (AI-2) Computer Science cpsc422, Lecture 19 Oct, 24, 2016 Slide Sources Raymond J. Mooney University of Texas at Austin D. Koller, Stanford CS - Probabilistic Graphical Models D. Page,
Intelligent Systems (AI-2) Computer Science cpsc422, Lecture 19 Oct, 24, 2016 Slide Sources Raymond J. Mooney University of Texas at Austin D. Koller, Stanford CS - Probabilistic Graphical Models D. Page,
Urban land use information retrieval based on scene classification of Google Street View images
 Urban land use information retrieval based on scene classification of Google Street View images Xiaojiang Li 1, Chuanrong Zhang 1 1 Department of Geography, University of Connecticut, Storrs Email: {xiaojiang.li;chuanrong.zhang}@uconn.edu
Urban land use information retrieval based on scene classification of Google Street View images Xiaojiang Li 1, Chuanrong Zhang 1 1 Department of Geography, University of Connecticut, Storrs Email: {xiaojiang.li;chuanrong.zhang}@uconn.edu
HeadNet: Pedestrian Head Detection Utilizing Body in Context
 HeadNet: Pedestrian Head Detection Utilizing Body in Context Gang Chen 1,2, Xufen Cai 1, Hu Han,1, Shiguang Shan 1,2,3 and Xilin Chen 1,2 1 Key Laboratory of Intelligent Information Processing of Chinese
HeadNet: Pedestrian Head Detection Utilizing Body in Context Gang Chen 1,2, Xufen Cai 1, Hu Han,1, Shiguang Shan 1,2,3 and Xilin Chen 1,2 1 Key Laboratory of Intelligent Information Processing of Chinese
CS 1674: Intro to Computer Vision. Final Review. Prof. Adriana Kovashka University of Pittsburgh December 7, 2016
 CS 1674: Intro to Computer Vision Final Review Prof. Adriana Kovashka University of Pittsburgh December 7, 2016 Final info Format: multiple-choice, true/false, fill in the blank, short answers, apply an
CS 1674: Intro to Computer Vision Final Review Prof. Adriana Kovashka University of Pittsburgh December 7, 2016 Final info Format: multiple-choice, true/false, fill in the blank, short answers, apply an
Anticipating Visual Representations from Unlabeled Data. Carl Vondrick, Hamed Pirsiavash, Antonio Torralba
 Anticipating Visual Representations from Unlabeled Data Carl Vondrick, Hamed Pirsiavash, Antonio Torralba Overview Problem Key Insight Methods Experiments Problem: Predict future actions and objects Image
Anticipating Visual Representations from Unlabeled Data Carl Vondrick, Hamed Pirsiavash, Antonio Torralba Overview Problem Key Insight Methods Experiments Problem: Predict future actions and objects Image
SUPERVISED LEARNING: INTRODUCTION TO CLASSIFICATION
 SUPERVISED LEARNING: INTRODUCTION TO CLASSIFICATION 1 Outline Basic terminology Features Training and validation Model selection Error and loss measures Statistical comparison Evaluation measures 2 Terminology
SUPERVISED LEARNING: INTRODUCTION TO CLASSIFICATION 1 Outline Basic terminology Features Training and validation Model selection Error and loss measures Statistical comparison Evaluation measures 2 Terminology
Fine-grained Classification
 Fine-grained Classification Marcel Simon Department of Mathematics and Computer Science, Germany marcel.simon@uni-jena.de http://www.inf-cv.uni-jena.de/ Seminar Talk 23.06.2015 Outline 1 Motivation 2 3
Fine-grained Classification Marcel Simon Department of Mathematics and Computer Science, Germany marcel.simon@uni-jena.de http://www.inf-cv.uni-jena.de/ Seminar Talk 23.06.2015 Outline 1 Motivation 2 3
A Hidden Markov Model for Alphabet-Soup Word Recognition
 A Hidden Markov Model for Alphabet-Soup Word Recognition Shaolei Feng Nicholas R. Howe R. Manmatha Dept. of Computer Science University of Massachusetts Amherst, MA-01003 slfeng@cs.umass.edu Dept. of Computer
A Hidden Markov Model for Alphabet-Soup Word Recognition Shaolei Feng Nicholas R. Howe R. Manmatha Dept. of Computer Science University of Massachusetts Amherst, MA-01003 slfeng@cs.umass.edu Dept. of Computer
Partially Observable Markov Decision Processes (POMDPs)
") Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Introduction to Bayesian Learning
 Course Information Introduction Introduction to Bayesian Learning Davide Bacciu Dipartimento di Informatica Università di Pisa bacciu@di.unipi.it Apprendimento Automatico: Fondamenti - A.A. 2016/2017 Outline
Course Information Introduction Introduction to Bayesian Learning Davide Bacciu Dipartimento di Informatica Università di Pisa bacciu@di.unipi.it Apprendimento Automatico: Fondamenti - A.A. 2016/2017 Outline
Probabilistic Graphical Models Homework 2: Due February 24, 2014 at 4 pm
 Probabilistic Graphical Models 10-708 Homework 2: Due February 24, 2014 at 4 pm Directions. This homework assignment covers the material presented in Lectures 4-8. You must complete all four problems to
Probabilistic Graphical Models 10-708 Homework 2: Due February 24, 2014 at 4 pm Directions. This homework assignment covers the material presented in Lectures 4-8. You must complete all four problems to
Leaving Some Stones Unturned: Dynamic Feature Prioritization for Activity Detection in Streaming Video
 In Proceedings of the European Conference on Computer Vision (ECCV), 26 Leaving Some Stones Unturned: Dynamic Feature Prioritization for Activity Detection in Streaming Video Yu-Chuan Su and Kristen Grauman
In Proceedings of the European Conference on Computer Vision (ECCV), 26 Leaving Some Stones Unturned: Dynamic Feature Prioritization for Activity Detection in Streaming Video Yu-Chuan Su and Kristen Grauman
Tennis player segmentation for semantic behavior analysis
 Proposta di Tennis player segmentation for semantic behavior analysis Architettura Software per Robot Mobili Vito Renò, Nicola Mosca, Massimiliano Nitti, Tiziana D Orazio, Donato Campagnoli, Andrea Prati,
Proposta di Tennis player segmentation for semantic behavior analysis Architettura Software per Robot Mobili Vito Renò, Nicola Mosca, Massimiliano Nitti, Tiziana D Orazio, Donato Campagnoli, Andrea Prati,
Overview of Statistical Tools. Statistical Inference. Bayesian Framework. Modeling. Very simple case. Things are usually more complicated
 Fall 3 Computer Vision Overview of Statistical Tools Statistical Inference Haibin Ling Observation inference Decision Prior knowledge http://www.dabi.temple.edu/~hbling/teaching/3f_5543/index.html Bayesian
Fall 3 Computer Vision Overview of Statistical Tools Statistical Inference Haibin Ling Observation inference Decision Prior knowledge http://www.dabi.temple.edu/~hbling/teaching/3f_5543/index.html Bayesian
Loss Functions and Optimization. Lecture 3-1
 Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative: Live Questions We ll use Zoom to take questions from remote students live-streaming the lecture Check Piazza for instructions and
Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative: Live Questions We ll use Zoom to take questions from remote students live-streaming the lecture Check Piazza for instructions and
Detector Ensemble. Abstract. 1. Introduction
 Detector Ensemble Shengyang Dai Ming Yang Ying Wu Aggelos Katsaggelos EECS Department, Northwestern University, Evanston, IL 60208, U.S.A. {sda690,mya671,yingwu,aggk}@ece.northwestern.edu Abstract Component-based
Detector Ensemble Shengyang Dai Ming Yang Ying Wu Aggelos Katsaggelos EECS Department, Northwestern University, Evanston, IL 60208, U.S.A. {sda690,mya671,yingwu,aggk}@ece.northwestern.edu Abstract Component-based
Probabilistic Time Series Classification
 Probabilistic Time Series Classification Y. Cem Sübakan Boğaziçi University 25.06.2013 Y. Cem Sübakan (Boğaziçi University) M.Sc. Thesis Defense 25.06.2013 1 / 54 Problem Statement The goal is to assign
Probabilistic Time Series Classification Y. Cem Sübakan Boğaziçi University 25.06.2013 Y. Cem Sübakan (Boğaziçi University) M.Sc. Thesis Defense 25.06.2013 1 / 54 Problem Statement The goal is to assign
Based on slides by Richard Zemel
 CSC 412/2506 Winter 2018 Probabilistic Learning and Reasoning Lecture 3: Directed Graphical Models and Latent Variables Based on slides by Richard Zemel Learning outcomes What aspects of a model can we
CSC 412/2506 Winter 2018 Probabilistic Learning and Reasoning Lecture 3: Directed Graphical Models and Latent Variables Based on slides by Richard Zemel Learning outcomes What aspects of a model can we
PCA FACE RECOGNITION
 PCA FACE RECOGNITION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Shree Nayar (Columbia) including their own slides. Goal
PCA FACE RECOGNITION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Shree Nayar (Columbia) including their own slides. Goal
Graph Cut based Inference with Co-occurrence Statistics
 Graph Cut based Inference with Co-occurrence Statistics Lubor Ladicky 1,3, Chris Russell 1,3, Pushmeet Kohli 2, and Philip H.S. Torr 1 1 Oxford Brookes 2 Microsoft Research Abstract. Markov and Conditional
Graph Cut based Inference with Co-occurrence Statistics Lubor Ladicky 1,3, Chris Russell 1,3, Pushmeet Kohli 2, and Philip H.S. Torr 1 1 Oxford Brookes 2 Microsoft Research Abstract. Markov and Conditional
Bayesian Methods: Naïve Bayes
 Bayesian Methods: aïve Bayes icholas Ruozzi University of Texas at Dallas based on the slides of Vibhav Gogate Last Time Parameter learning Learning the parameter of a simple coin flipping model Prior
Bayesian Methods: aïve Bayes icholas Ruozzi University of Texas at Dallas based on the slides of Vibhav Gogate Last Time Parameter learning Learning the parameter of a simple coin flipping model Prior
Assignment 1 (Sol.) Introduction to Machine Learning Prof. B. Ravindran. 1. Which of the following tasks can be best solved using Clustering.
 Introduction to Machine Learning Prof. B. Ravindran. 1. Which of the following tasks can be best solved using Clustering.") Assignment 1 (Sol.) Introduction to Machine Learning Prof. B. Ravindran 1. Which of the following tasks can be best solved using Clustering. (a) Predicting the amount of rainfall based on various cues
Assignment 1 (Sol.) Introduction to Machine Learning Prof. B. Ravindran 1. Which of the following tasks can be best solved using Clustering. (a) Predicting the amount of rainfall based on various cues
CSCI-567: Machine Learning (Spring 2019)
") CSCI-567: Machine Learning (Spring 2019) Prof. Victor Adamchik U of Southern California Mar. 19, 2019 March 19, 2019 1 / 43 Administration March 19, 2019 2 / 43 Administration TA3 is due this week March
CSCI-567: Machine Learning (Spring 2019) Prof. Victor Adamchik U of Southern California Mar. 19, 2019 March 19, 2019 1 / 43 Administration March 19, 2019 2 / 43 Administration TA3 is due this week March
Markov Networks. l Like Bayes Nets. l Graph model that describes joint probability distribution using tables (AKA potentials)
") Markov Networks l Like Bayes Nets l Graph model that describes joint probability distribution using tables (AKA potentials) l Nodes are random variables l Labels are outcomes over the variables Markov
Markov Networks l Like Bayes Nets l Graph model that describes joint probability distribution using tables (AKA potentials) l Nodes are random variables l Labels are outcomes over the variables Markov
CSC487/2503: Foundations of Computer Vision. Visual Tracking. David Fleet
 CSC487/2503: Foundations of Computer Vision Visual Tracking David Fleet Introduction What is tracking? Major players: Dynamics (model of temporal variation of target parameters) Measurements (relation
CSC487/2503: Foundations of Computer Vision Visual Tracking David Fleet Introduction What is tracking? Major players: Dynamics (model of temporal variation of target parameters) Measurements (relation
Statistical Problems in Computer Vision
 V and ML Statistical Problems in omputer Vision Machine Learning and Perception Group Microsoft Research ambridge SI Meeting, ambridge, 26th September 2011 Statistical Problems in omputer Vision Microsoft
V and ML Statistical Problems in omputer Vision Machine Learning and Perception Group Microsoft Research ambridge SI Meeting, ambridge, 26th September 2011 Statistical Problems in omputer Vision Microsoft
Much Ado About Time: Exhaustive Annotation of Temporal Data. Gunnar A. Sigurdsson, Olga Russakovsky, Ali Farhadi, Ivan Laptev, Abhinav Gupta
 Much Ado About Time: Exhaustive Annotation of Temporal Data Gunnar A. Sigurdsson, Olga Russakovsky, Ali Farhadi, Ivan Laptev, Abhinav Gupta Datasets drive computer vision progress Computer vision capabilities
Much Ado About Time: Exhaustive Annotation of Temporal Data Gunnar A. Sigurdsson, Olga Russakovsky, Ali Farhadi, Ivan Laptev, Abhinav Gupta Datasets drive computer vision progress Computer vision capabilities