HW 6 Mathematics 503, Mathematical Modeling, CSUF, June 24, 2007
|
|
|
- Charity Hopkins
- 5 years ago
- Views:
Transcription
1 HW 6 Mathematics 503, Mathematical Modeling, CSUF, June 24, 2007 Nasser M. Abbasi June 15, 2014 Contents 1 Problem 1 (section 3.5,#9, page Problem 1 (section 3.5,#9, page Problem 1 (section 3.5,#9, page 197 problem: Consider a simple plane pendulum with a bob of mass m attached to a string of length l. After the pendulum is set in motion the string is shortened by a constant rate dl dt = α. Formulate Hamilton s principle and determine the equation of motion. Compare the Hamiltonian to the total energy. Is energy conserved? Solution: 1
2 Assume initial string length is l, and assume t (0 = 0, then at time t we have r (t = l αt K.E. First note that ẋ = d (r (tsinθ (t dt = ṙ sinθ + r cosθ θ and ẏ = d (r (tcosθ (t dt = ṙ cosθ r sinθ θ Now T = 1 2 m( ẋ 2 + ẏ 2 = 1 ( (ṙ 2 m sinθ + r cosθ θ 2 (ṙ + cosθ r sinθ θ 2 = 1 2 m( ṙ 2 + r 2 θ 2 = 1 2 m( α 2 + r 2 θ 2 2
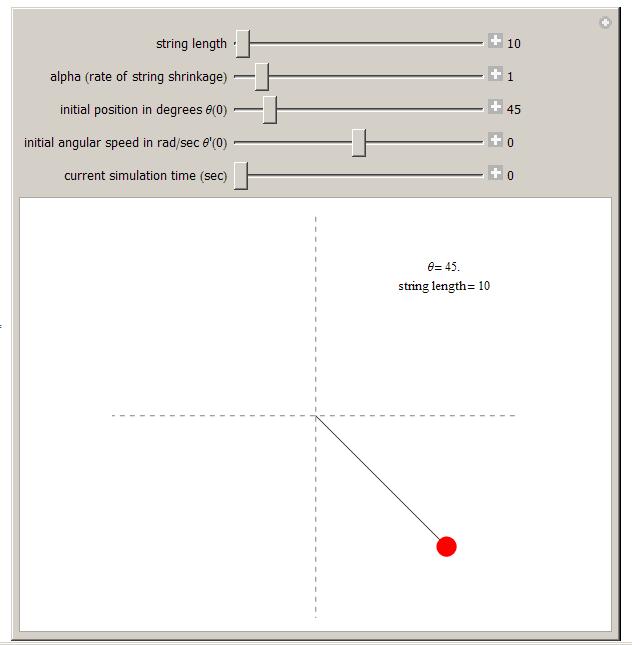
3 P.E. J (θ = = T 0 T 0 V = mgl mg(r cosθ = mg(l r cosθ (T V dt the Euler-Lagrange equations are 1 2 m( α 2 + r 2 θ 2 mg(l r cosθ dt L ( t,θ (t, θ (t = 1 2 m( α 2 + r 2 θ 2 mg(l r cosθ (1 But L θ d dt ( L θ = 0 (2 L θ = mgr sinθ and L θ = mr2 θ and But ṙ = α, the above becomes d ( ( L dt θ = m 2rṙ θ + r 2 θ L θ d dt ( L θ = 0 becomes ( ( d dt L θ = m r 2 θ 2rα θ mgr sinθ m ( r 2 θ 2α θr = 0 r 2 θ 2α θr + gr sinθ = 0 the ODE becomes, after dividing by common factor r r θ 2α θ + gsinθ = 0 This is a second order nonlinear differential equation. Notice that when l = αt it will mean that the string has been pulled all the way back to the pivot and r (t = 0. So when running the solution it needs to run from t = 0 up to t = l α. A small simulation was done for the above solution which can be run for different parameters to see the effect more easily. Here is a screen shot. 3
4 4
5 Now we need to determine the Hamiltonian of the system. H = L(t,θ,φ (t,θ, p + φ (t,θ, p p (3 Where we define a new variable p called the canonical momentum by This implies that Then from (1 and (3, we now calculate H ( p L θ t,θ, θ = mr 2 θ θ = p mr 2 φ (t,θ, p = p mr 2 the Hamiltonian is H = L(t,θ,φ (t,θ, p + φ (t,θ, p p { ( 1 ( = 2 m α 2 + r 2 p } 2 ( p mr 2 mg(l r cosθ + mr 2 p = 1 ( 2 m α 2 + p2 m 2 r 2 + mg(l r cosθ + p2 mr 2 p 2 = 1 2 mα2 1 p2 + mg(l r cosθ + 2 mr2 mr 2 p 2 H = 1 2 mr 2 + mg(l r cosθ 1 2 mα2 (5 Now we are asked to compare H to the total energy. The total instantaneous energy of the system is (T +V, hence we need to determine if H = T +V or not. T +V = 1 2 m( α 2 + r 2 θ 2 + mg(l r cosθ (6 To make comparing (5 and (6 easier, I need to either replace p by mr 2 θ in (5 or replace θ by Lets do the later, hence (6 becomes T +V = 1 ( ( 2 m α 2 + r 2 p 2 mr 2 + mg(l r cosθ = 1 2 m ( α 2 + p2 m 2 r 2 p 2 + mg(l r cosθ p mr 2. = 1 2 mα mg(l r cosθ (7 2 mr2 If H is the total energy, then (7-(6 should come out to be zero, lets find out 5
6 ( 1 p 2 H (T +V = 2 mr 2 + mg(l r cosθ 1 2 mα2 = mα 2 we see that ( 1 2 mα p 2 + mg(l r cosθ mr2 H (T +V 0 H does not represents the total energy, and the energy of the system is not conserved. 1 1 Reading a reference on Noether s theorem, total energy is written as (T +V not (T +V, this would not make a difference in showing that H total energy, just different calculations results as shown below, but the same conclusion ( 1 (T +V = 2 m( α 2 + r 2 θ 2 + mg(l r cosθ (6 To make comparing (5 and (6 easier, I need to either replace p by mr 2 θ in (5 or replace θ by p, let do the later, hence mr (6 becomes 2 ( 1 (T +V = ( ( 2 m α 2 + r 2 p 2 mr 2 ( 1 = (α 2 m 2 + p2 m 2 r 2 + mg(l r cosθ ( 1 = 2 mα2 + 1 p 2 + mg(l r cosθ 2 mr2 + mg(l r cosθ (7 If H is the total energy, then (7-(6 should come out to be zero, lets find out ( 1 p 2 H ( (T +V = 2 mr 2 + mg(l r cosθ 1 ( 1 2 mα2 + 2 mα = p2 + 2mg(l r cosθ mr2 p 2 + mg(l r cosθ mr2 Now we ask, can the above be zero? Since p2 mr 2 is always 0, and since (l r cosθ represents the remaining length of the string, hence it is a positive quantity (until such time the string has been pulled all the way in, Therefore RHS above > 0. H does not represent the total energy of the system. the energy is not conserved. 6
7 2 Problem 1 (section 3.5,#9, page 197 problem: A bead of mass m slides down the rim of a circular hoop of radius R. The hoop stands vertically and rotates about its diameter with angular velocity ω. Determine the equation of motion of the bead. Answer: Kinetic energy T is made up of 2 components, one due to motion of the bead along the hoop itself with speed R θ, and another due to motion with angular speed ω which has speed given by Rsinθω T = 1 2 m ( (R θ 2 + (Rsinθω 2 = 1 2 mr2 ( θ 2 + ω 2 sin 2 θ P.E. V is due to the bead movement up and down the hoop, which is the standard V for a pendulum given by V = mgr(1 cosθ 7
8 L = T V = 1 2 mr2 ( θ 2 + ω 2 sin 2 θ mgr(1 cosθ and L θ = mr 2 ( ω 2 sinθ cosθ mgrsinθ L θ = mr2 θ d dt L θ = mr2 θ L θ d dt L θ = 0 mr 2 ( ω 2 sinθ cosθ mgrsinθ mr 2 θ = 0 ω 2 sinθ cosθ g R sinθ θ = 0 the ODE is θ + sinθ ( g R ω2 cosθ = 0 With initial conditions θ (0 = θ 0, θ (0 = θ 0 8
M2A2 Problem Sheet 3 - Hamiltonian Mechanics
 MA Problem Sheet 3 - Hamiltonian Mechanics. The particle in a cone. A particle slides under gravity, inside a smooth circular cone with a vertical axis, z = k x + y. Write down its Lagrangian in a) Cartesian,
MA Problem Sheet 3 - Hamiltonian Mechanics. The particle in a cone. A particle slides under gravity, inside a smooth circular cone with a vertical axis, z = k x + y. Write down its Lagrangian in a) Cartesian,
Marion and Thornton. Tyler Shendruk October 1, Hamilton s Principle - Lagrangian and Hamiltonian dynamics.
 Marion and Thornton Tyler Shendruk October 1, 2010 1 Marion and Thornton Chapter 7 Hamilton s Principle - Lagrangian and Hamiltonian dynamics. 1.1 Problem 6.4 s r z θ Figure 1: Geodesic on circular cylinder
Marion and Thornton Tyler Shendruk October 1, 2010 1 Marion and Thornton Chapter 7 Hamilton s Principle - Lagrangian and Hamiltonian dynamics. 1.1 Problem 6.4 s r z θ Figure 1: Geodesic on circular cylinder
Physics 235 Chapter 7. Chapter 7 Hamilton's Principle - Lagrangian and Hamiltonian Dynamics
 Chapter 7 Hamilton's Principle - Lagrangian and Hamiltonian Dynamics Many interesting physics systems describe systems of particles on which many forces are acting. Some of these forces are immediately
Chapter 7 Hamilton's Principle - Lagrangian and Hamiltonian Dynamics Many interesting physics systems describe systems of particles on which many forces are acting. Some of these forces are immediately
CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS. Prof. N. Harnew University of Oxford TT 2017
 CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS Prof. N. Harnew University of Oxford TT 2017 1 OUTLINE : CP1 REVISION LECTURE 3 : INTRODUCTION TO CLASSICAL MECHANICS 1. Angular velocity and
CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS Prof. N. Harnew University of Oxford TT 2017 1 OUTLINE : CP1 REVISION LECTURE 3 : INTRODUCTION TO CLASSICAL MECHANICS 1. Angular velocity and
HW3 Physics 311 Mechanics
 HW3 Physics 311 Mechanics FA L L 2 0 1 5 P H Y S I C S D E PA R T M E N T U N I V E R S I T Y O F W I S C O N S I N, M A D I S O N I N S T R U C T O R : P R O F E S S O R S T E F A N W E S T E R H O F
HW3 Physics 311 Mechanics FA L L 2 0 1 5 P H Y S I C S D E PA R T M E N T U N I V E R S I T Y O F W I S C O N S I N, M A D I S O N I N S T R U C T O R : P R O F E S S O R S T E F A N W E S T E R H O F
Physics 351, Spring 2015, Homework #5. Due at start of class, Friday, February 20, 2015 Course info is at positron.hep.upenn.
 Physics 351, Spring 2015, Homework #5. Due at start of class, Friday, February 20, 2015 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page
Physics 351, Spring 2015, Homework #5. Due at start of class, Friday, February 20, 2015 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page
Question 1: A particle starts at rest and moves along a cycloid whose equation is. 2ay y a
 Stephen Martin PHYS 10 Homework #1 Question 1: A particle starts at rest and moves along a cycloid whose equation is [ ( ) a y x = ± a cos 1 + ] ay y a There is a gravitational field of strength g in the
Stephen Martin PHYS 10 Homework #1 Question 1: A particle starts at rest and moves along a cycloid whose equation is [ ( ) a y x = ± a cos 1 + ] ay y a There is a gravitational field of strength g in the
PHY 5246: Theoretical Dynamics, Fall September 28 th, 2015 Midterm Exam # 1
 Name: SOLUTIONS PHY 5246: Theoretical Dynamics, Fall 2015 September 28 th, 2015 Mierm Exam # 1 Always remember to write full work for what you do. This will help your grade in case of incomplete or wrong
Name: SOLUTIONS PHY 5246: Theoretical Dynamics, Fall 2015 September 28 th, 2015 Mierm Exam # 1 Always remember to write full work for what you do. This will help your grade in case of incomplete or wrong
Constrained motion and generalized coordinates
 Constrained motion and generalized coordinates based on FW-13 Often, the motion of particles is restricted by constraints, and we want to: work only with independent degrees of freedom (coordinates) k
Constrained motion and generalized coordinates based on FW-13 Often, the motion of particles is restricted by constraints, and we want to: work only with independent degrees of freedom (coordinates) k
Classical Mechanics Comprehensive Exam Solution
 Classical Mechanics Comprehensive Exam Solution January 31, 011, 1:00 pm 5:pm Solve the following six problems. In the following problems, e x, e y, and e z are unit vectors in the x, y, and z directions,
Classical Mechanics Comprehensive Exam Solution January 31, 011, 1:00 pm 5:pm Solve the following six problems. In the following problems, e x, e y, and e z are unit vectors in the x, y, and z directions,
Assignments VIII and IX, PHYS 301 (Classical Mechanics) Spring 2014 Due 3/21/14 at start of class
 Spring 2014 Due 3/21/14 at start of class") Assignments VIII and IX, PHYS 301 (Classical Mechanics) Spring 2014 Due 3/21/14 at start of class Homeworks VIII and IX both center on Lagrangian mechanics and involve many of the same skills. Therefore,
Assignments VIII and IX, PHYS 301 (Classical Mechanics) Spring 2014 Due 3/21/14 at start of class Homeworks VIII and IX both center on Lagrangian mechanics and involve many of the same skills. Therefore,
Forces of Rolling. 1) Ifobjectisrollingwith a com =0 (i.e.no netforces), then v com =ωr = constant (smooth roll)
 Ifobjectisrollingwith a com =0 (i.e.no netforces), then v com =ωr = constant (smooth roll)") Physics 2101 Section 3 March 12 rd : Ch. 10 Announcements: Mid-grades posted in PAW Quiz today I will be at the March APS meeting the week of 15-19 th. Prof. Rich Kurtz will help me. Class Website: http://www.phys.lsu.edu/classes/spring2010/phys2101-3/
Physics 2101 Section 3 March 12 rd : Ch. 10 Announcements: Mid-grades posted in PAW Quiz today I will be at the March APS meeting the week of 15-19 th. Prof. Rich Kurtz will help me. Class Website: http://www.phys.lsu.edu/classes/spring2010/phys2101-3/
15. Hamiltonian Mechanics
 University of Rhode Island DigitalCommons@URI Classical Dynamics Physics Course Materials 2015 15. Hamiltonian Mechanics Gerhard Müller University of Rhode Island, gmuller@uri.edu Creative Commons License
University of Rhode Island DigitalCommons@URI Classical Dynamics Physics Course Materials 2015 15. Hamiltonian Mechanics Gerhard Müller University of Rhode Island, gmuller@uri.edu Creative Commons License
Classical Mechanics Review (Louisiana State University Qualifier Exam)
") Review Louisiana State University Qualifier Exam Jeff Kissel October 22, 2006 A particle of mass m. at rest initially, slides without friction on a wedge of angle θ and and mass M that can move without
Review Louisiana State University Qualifier Exam Jeff Kissel October 22, 2006 A particle of mass m. at rest initially, slides without friction on a wedge of angle θ and and mass M that can move without
Solution Set Two. 1 Problem #1: Projectile Motion Cartesian Coordinates Polar Coordinates... 3
 : Solution Set Two Northwestern University, Classical Mechanics Classical Mechanics, Third Ed.- Goldstein October 7, 2015 Contents 1 Problem #1: Projectile Motion. 2 1.1 Cartesian Coordinates....................................
: Solution Set Two Northwestern University, Classical Mechanics Classical Mechanics, Third Ed.- Goldstein October 7, 2015 Contents 1 Problem #1: Projectile Motion. 2 1.1 Cartesian Coordinates....................................
= 2 5 MR2. I sphere = MR 2. I hoop = 1 2 MR2. I disk
 A sphere (green), a disk (blue), and a hoop (red0, each with mass M and radius R, all start from rest at the top of an inclined plane and roll to the bottom. Which object reaches the bottom first? (Use
A sphere (green), a disk (blue), and a hoop (red0, each with mass M and radius R, all start from rest at the top of an inclined plane and roll to the bottom. Which object reaches the bottom first? (Use
7 Pendulum. Part II: More complicated situations
 MATH 35, by T. Lakoba, University of Vermont 60 7 Pendulum. Part II: More complicated situations In this Lecture, we will pursue two main goals. First, we will take a glimpse at a method of Classical Mechanics
MATH 35, by T. Lakoba, University of Vermont 60 7 Pendulum. Part II: More complicated situations In this Lecture, we will pursue two main goals. First, we will take a glimpse at a method of Classical Mechanics
Dynamics II Motion in a Plane. Review Problems
 Dynamics II Motion in a Plane Review Problems Problem 1 A 500 g model rocket is on a cart that is rolling to the right at a speed of 3.0 m/s. The rocket engine, when it is fired, exerts an 8.0 N thrust
Dynamics II Motion in a Plane Review Problems Problem 1 A 500 g model rocket is on a cart that is rolling to the right at a speed of 3.0 m/s. The rocket engine, when it is fired, exerts an 8.0 N thrust
Chapter 10. Rotation
 Chapter 10 Rotation Rotation Rotational Kinematics: Angular velocity and Angular Acceleration Rotational Kinetic Energy Moment of Inertia Newton s nd Law for Rotation Applications MFMcGraw-PHY 45 Chap_10Ha-Rotation-Revised
Chapter 10 Rotation Rotation Rotational Kinematics: Angular velocity and Angular Acceleration Rotational Kinetic Energy Moment of Inertia Newton s nd Law for Rotation Applications MFMcGraw-PHY 45 Chap_10Ha-Rotation-Revised
PHY6426/Fall 07: CLASSICAL MECHANICS HOMEWORK ASSIGNMENT #1 due by 9:35 a.m. Wed 09/05 Instructor: D. L. Maslov Rm.
 PHY646/Fall 07: CLASSICAL MECHANICS HOMEWORK ASSIGNMENT # due by 9:35 a.m. Wed 09/05 Instructor: D. L. Maslov maslov@phys.ufl.edu 39-053 Rm. 4 Please help your instructor by doing your work neatly.. Goldstein,
PHY646/Fall 07: CLASSICAL MECHANICS HOMEWORK ASSIGNMENT # due by 9:35 a.m. Wed 09/05 Instructor: D. L. Maslov maslov@phys.ufl.edu 39-053 Rm. 4 Please help your instructor by doing your work neatly.. Goldstein,
Physics 106a, Caltech 16 October, Lecture 5: Hamilton s Principle with Constraints. Examples
 Physics 106a, Caltech 16 October, 2018 Lecture 5: Hamilton s Principle with Constraints We have been avoiding forces of constraint, because in many cases they are uninteresting, and the constraints can
Physics 106a, Caltech 16 October, 2018 Lecture 5: Hamilton s Principle with Constraints We have been avoiding forces of constraint, because in many cases they are uninteresting, and the constraints can
Mechanics 2 Aide Memoire. Work done = or Fx for a constant force, F over a distance, x. = or Pt for constant power, P over t seconds
 Mechanics 2 Aide Memoire Work done measured in Joules Energy lost due to overcoming a force (no work done if force acts perpendicular to the direction of motion) Work done = or Fx for a constant force,
Mechanics 2 Aide Memoire Work done measured in Joules Energy lost due to overcoming a force (no work done if force acts perpendicular to the direction of motion) Work done = or Fx for a constant force,
Physics 351, Spring 2015, Homework #6. Due at start of class, Friday, February 27, 2015
 Physics 351, Spring 2015, Homework #6. Due at start of class, Friday, February 27, 2015 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page
Physics 351, Spring 2015, Homework #6. Due at start of class, Friday, February 27, 2015 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page
DEPARTMENT OF PHYSICS. University at Albany State University of New York. Comprehensive Field Examination. Classical. Monday, May 21, 2018
 DEPARTMENT OF PHYSICS University at Albany State University of New York Comprehensive Field Examination Classical Monday, May 21, 218 1: AM - 1: PM Instruction: Answer any four out of five questions Please
DEPARTMENT OF PHYSICS University at Albany State University of New York Comprehensive Field Examination Classical Monday, May 21, 218 1: AM - 1: PM Instruction: Answer any four out of five questions Please
ANALYTISK MEKANIK I HT 2014
 Karlstads Universitet Fysik ANALYTISK MEKANIK I HT 2014 Kursens kod: FYGB08 Undervisande lärare: Jürgen Fuchs rum 21F 316 tel. 054-700 1817 el.mail: jfuchs@fuchs.tekn.kau.se FYGB08 HT 2014 Exercises 1
Karlstads Universitet Fysik ANALYTISK MEKANIK I HT 2014 Kursens kod: FYGB08 Undervisande lärare: Jürgen Fuchs rum 21F 316 tel. 054-700 1817 el.mail: jfuchs@fuchs.tekn.kau.se FYGB08 HT 2014 Exercises 1
Assignment 2. Tyler Shendruk October 8, Hamilton s Principle - Lagrangian and Hamiltonian dynamics.
 Assignent Tyler Shendruk October 8, 010 1 Marion and Thornton Chapter 7 Hailton s Principle - Lagrangian and Hailtonian dynaics. 1.1 Proble 7.9 y z x l θ α Figure 1: A disk rolling down an incline plane.
Assignent Tyler Shendruk October 8, 010 1 Marion and Thornton Chapter 7 Hailton s Principle - Lagrangian and Hailtonian dynaics. 1.1 Proble 7.9 y z x l θ α Figure 1: A disk rolling down an incline plane.
EE Homework 3 Due Date: 03 / 30 / Spring 2015
 EE 476 - Homework 3 Due Date: 03 / 30 / 2015 Spring 2015 Exercise 1 (10 points). Consider the problem of two pulleys and a mass discussed in class. We solved a version of the problem where the mass was
EE 476 - Homework 3 Due Date: 03 / 30 / 2015 Spring 2015 Exercise 1 (10 points). Consider the problem of two pulleys and a mass discussed in class. We solved a version of the problem where the mass was
Physics 312, Winter 2007, Practice Final
 Physics 312, Winter 2007, Practice Final Time: Two hours Answer one of Question 1 or Question 2 plus one of Question 3 or Question 4 plus one of Question 5 or Question 6. Each question carries equal weight.
Physics 312, Winter 2007, Practice Final Time: Two hours Answer one of Question 1 or Question 2 plus one of Question 3 or Question 4 plus one of Question 5 or Question 6. Each question carries equal weight.
Lecture 13: Forces in the Lagrangian Approach
 Lecture 3: Forces in the Lagrangian Approach In regular Cartesian coordinates, the Lagrangian for a single particle is: 3 L = T U = m x ( ) l U xi l= Given this, we can readily interpret the physical significance
Lecture 3: Forces in the Lagrangian Approach In regular Cartesian coordinates, the Lagrangian for a single particle is: 3 L = T U = m x ( ) l U xi l= Given this, we can readily interpret the physical significance
Angular Momentum. Physics 1425 Lecture 21. Michael Fowler, UVa
 Angular Momentum Physics 1425 Lecture 21 Michael Fowler, UVa A New Look for τ = Iα We ve seen how τ = Iα works for a body rotating about a fixed axis. τ = Iα is not true in general if the axis of rotation
Angular Momentum Physics 1425 Lecture 21 Michael Fowler, UVa A New Look for τ = Iα We ve seen how τ = Iα works for a body rotating about a fixed axis. τ = Iα is not true in general if the axis of rotation
Physics 201. Professor P. Q. Hung. 311B, Physics Building. Physics 201 p. 1/1
 Physics 201 p. 1/1 Physics 201 Professor P. Q. Hung 311B, Physics Building Physics 201 p. 2/1 Rotational Kinematics and Energy Rotational Kinetic Energy, Moment of Inertia All elements inside the rigid
Physics 201 p. 1/1 Physics 201 Professor P. Q. Hung 311B, Physics Building Physics 201 p. 2/1 Rotational Kinematics and Energy Rotational Kinetic Energy, Moment of Inertia All elements inside the rigid
Friction is always opposite to the direction of motion.
 6. Forces and Motion-II Friction: The resistance between two surfaces when attempting to slide one object across the other. Friction is due to interactions at molecular level where rough edges bond together:
6. Forces and Motion-II Friction: The resistance between two surfaces when attempting to slide one object across the other. Friction is due to interactions at molecular level where rough edges bond together:
LAGRANGIAN AND HAMILTONIAN
 LAGRANGIAN AND HAMILTONIAN A. Constraints and Degrees of Freedom. A constraint is a restriction on the freedom of motion of a system of particles in the form of a condition. The number of independent ways
LAGRANGIAN AND HAMILTONIAN A. Constraints and Degrees of Freedom. A constraint is a restriction on the freedom of motion of a system of particles in the form of a condition. The number of independent ways
ESM 3124 Intermediate Dynamics 2012, HW6 Solutions. (1 + f (x) 2 ) We can first write the constraint y = f(x) in the form of a constraint
 2 ) We can first write the constraint y = f(x) in the form of a constraint") ESM 314 Intermediate Dynamics 01, HW6 Solutions Roller coaster. A bead of mass m can slide without friction, under the action of gravity, on a smooth rigid wire which has the form y = f(x). (a) Find the
ESM 314 Intermediate Dynamics 01, HW6 Solutions Roller coaster. A bead of mass m can slide without friction, under the action of gravity, on a smooth rigid wire which has the form y = f(x). (a) Find the
Chapter 6. Force and motion II
 Chapter 6. Force and motion II Friction Static friction Sliding (Kinetic) friction Circular motion Physics, Page 1 Summary of last lecture Newton s First Law: The motion of an object does not change unless
Chapter 6. Force and motion II Friction Static friction Sliding (Kinetic) friction Circular motion Physics, Page 1 Summary of last lecture Newton s First Law: The motion of an object does not change unless
The Principle of Least Action
 The Principle of Least Action In their never-ending search for general principles, from which various laws of Physics could be derived, physicists, and most notably theoretical physicists, have often made
The Principle of Least Action In their never-ending search for general principles, from which various laws of Physics could be derived, physicists, and most notably theoretical physicists, have often made
P321(b), Assignement 1
, Assignement 1") P31(b), Assignement 1 1 Exercise 3.1 (Fetter and Walecka) a) The problem is that of a point mass rotating along a circle of radius a, rotating with a constant angular velocity Ω. Generally, 3 coordinates
P31(b), Assignement 1 1 Exercise 3.1 (Fetter and Walecka) a) The problem is that of a point mass rotating along a circle of radius a, rotating with a constant angular velocity Ω. Generally, 3 coordinates
Phys 7221, Fall 2006: Midterm exam
 Phys 7221, Fall 2006: Midterm exam October 20, 2006 Problem 1 (40 pts) Consider a spherical pendulum, a mass m attached to a rod of length l, as a constrained system with r = l, as shown in the figure.
Phys 7221, Fall 2006: Midterm exam October 20, 2006 Problem 1 (40 pts) Consider a spherical pendulum, a mass m attached to a rod of length l, as a constrained system with r = l, as shown in the figure.
21.60 Worksheet 8 - preparation problems - question 1:
 Dynamics 190 1.60 Worksheet 8 - preparation problems - question 1: A particle of mass m moes under the influence of a conseratie central force F (r) =g(r)r where r = xˆx + yŷ + zẑ and r = x + y + z. A.
Dynamics 190 1.60 Worksheet 8 - preparation problems - question 1: A particle of mass m moes under the influence of a conseratie central force F (r) =g(r)r where r = xˆx + yŷ + zẑ and r = x + y + z. A.
Physics Fall Mechanics, Thermodynamics, Waves, Fluids. Lecture 20: Rotational Motion. Slide 20-1
 Physics 1501 Fall 2008 Mechanics, Thermodynamics, Waves, Fluids Lecture 20: Rotational Motion Slide 20-1 Recap: center of mass, linear momentum A composite system behaves as though its mass is concentrated
Physics 1501 Fall 2008 Mechanics, Thermodynamics, Waves, Fluids Lecture 20: Rotational Motion Slide 20-1 Recap: center of mass, linear momentum A composite system behaves as though its mass is concentrated
Physics 351 Wednesday, February 14, 2018
 Physics 351 Wednesday, February 14, 2018 HW4 due Friday. For HW help, Bill is in DRL 3N6 Wed 4 7pm. Grace is in DRL 2C2 Thu 5:30 8:30pm. Respond at pollev.com/phys351 or text PHYS351 to 37607 once to join,
Physics 351 Wednesday, February 14, 2018 HW4 due Friday. For HW help, Bill is in DRL 3N6 Wed 4 7pm. Grace is in DRL 2C2 Thu 5:30 8:30pm. Respond at pollev.com/phys351 or text PHYS351 to 37607 once to join,
PHY 5246: Theoretical Dynamics, Fall November 16 th, 2015 Assignment # 11, Solutions. p θ = L θ = mr2 θ, p φ = L θ = mr2 sin 2 θ φ.
 PHY 5246: Theoretical Dynamics, Fall 215 November 16 th, 215 Assignment # 11, Solutions 1 Graded problems Problem 1 1.a) The Lagrangian is L = 1 2 m(ṙ2 +r 2 θ2 +r 2 sin 2 θ φ 2 ) V(r), (1) and the conjugate
PHY 5246: Theoretical Dynamics, Fall 215 November 16 th, 215 Assignment # 11, Solutions 1 Graded problems Problem 1 1.a) The Lagrangian is L = 1 2 m(ṙ2 +r 2 θ2 +r 2 sin 2 θ φ 2 ) V(r), (1) and the conjugate
Physics 5153 Classical Mechanics. Canonical Transformations-1
 1 Introduction Physics 5153 Classical Mechanics Canonical Transformations The choice of generalized coordinates used to describe a physical system is completely arbitrary, but the Lagrangian is invariant
1 Introduction Physics 5153 Classical Mechanics Canonical Transformations The choice of generalized coordinates used to describe a physical system is completely arbitrary, but the Lagrangian is invariant
Second quantization: where quantization and particles come from?
 110 Phys460.nb 7 Second quantization: where quantization and particles come from? 7.1. Lagrangian mechanics and canonical quantization Q: How do we quantize a general system? 7.1.1.Lagrangian Lagrangian
110 Phys460.nb 7 Second quantization: where quantization and particles come from? 7.1. Lagrangian mechanics and canonical quantization Q: How do we quantize a general system? 7.1.1.Lagrangian Lagrangian
I ml. g l. sin. l 0,,2,...,n A. ( t vs. ), and ( vs. ). d dt. sin l
, and ( vs. ). d dt. sin l") Advanced Control Theory Homework #3 Student No.597 Name : Jinseong Kim. The simple pendulum dynamics is given by g sin L A. Derive above dynamic equation from the free body diagram. B. Find the equilibrium
Advanced Control Theory Homework #3 Student No.597 Name : Jinseong Kim. The simple pendulum dynamics is given by g sin L A. Derive above dynamic equation from the free body diagram. B. Find the equilibrium
If rigid body = few particles I = m i. If rigid body = too-many-to-count particles I = I COM. KE rot. = 1 2 Iω 2
 2 If rigid body = few particles I = m i r i If rigid body = too-many-to-count particles Sum Integral Parallel Axis Theorem I = I COM + Mh 2 Energy of rota,onal mo,on KE rot = 1 2 Iω 2 [ KE trans = 1 2
2 If rigid body = few particles I = m i r i If rigid body = too-many-to-count particles Sum Integral Parallel Axis Theorem I = I COM + Mh 2 Energy of rota,onal mo,on KE rot = 1 2 Iω 2 [ KE trans = 1 2
Physics 351, Spring 2015, Final Exam.
 Physics 351, Spring 2015, Final Exam. This closed-book exam has (only) 25% weight in your course grade. You can use one sheet of your own hand-written notes. Please show your work on these pages. The back
Physics 351, Spring 2015, Final Exam. This closed-book exam has (only) 25% weight in your course grade. You can use one sheet of your own hand-written notes. Please show your work on these pages. The back
ω = ω 0 θ = θ + ω 0 t αt ( ) Rota%onal Kinema%cs: ( ONLY IF α = constant) v = ω r ω ω r s = θ r v = d θ dt r = ω r + a r = a a tot + a t = a r
 Rota%onal Kinema%cs: ( ONLY IF α = constant) v = ω r ω ω r s = θ r v = d θ dt r = ω r + a r = a a tot + a t = a r") θ (t) ( θ 1 ) Δ θ = θ 2 s = θ r ω (t) = d θ (t) dt v = d θ dt r = ω r v = ω r α (t) = d ω (t) dt = d 2 θ (t) dt 2 a tot 2 = a r 2 + a t 2 = ω 2 r 2 + αr 2 a tot = a t + a r = a r ω ω r a t = α r ( ) Rota%onal
θ (t) ( θ 1 ) Δ θ = θ 2 s = θ r ω (t) = d θ (t) dt v = d θ dt r = ω r v = ω r α (t) = d ω (t) dt = d 2 θ (t) dt 2 a tot 2 = a r 2 + a t 2 = ω 2 r 2 + αr 2 a tot = a t + a r = a r ω ω r a t = α r ( ) Rota%onal
Central force motion/kepler problem. 1 Reducing 2-body motion to effective 1-body, that too with 2 d.o.f and 1st order differential equations
 Central force motion/kepler problem This short note summarizes our discussion in the lectures of various aspects of the motion under central force, in particular, the Kepler problem of inverse square-law
Central force motion/kepler problem This short note summarizes our discussion in the lectures of various aspects of the motion under central force, in particular, the Kepler problem of inverse square-law
Solution Derivations for Capa #12
 Solution Derivations for Capa #12 1) A hoop of radius 0.200 m and mass 0.460 kg, is suspended by a point on it s perimeter as shown in the figure. If the hoop is allowed to oscillate side to side as a
Solution Derivations for Capa #12 1) A hoop of radius 0.200 m and mass 0.460 kg, is suspended by a point on it s perimeter as shown in the figure. If the hoop is allowed to oscillate side to side as a
Lecture 4. Alexey Boyarsky. October 6, 2015
 Lecture 4 Alexey Boyarsky October 6, 2015 1 Conservation laws and symmetries 1.1 Ignorable Coordinates During the motion of a mechanical system, the 2s quantities q i and q i, (i = 1, 2,..., s) which specify
Lecture 4 Alexey Boyarsky October 6, 2015 1 Conservation laws and symmetries 1.1 Ignorable Coordinates During the motion of a mechanical system, the 2s quantities q i and q i, (i = 1, 2,..., s) which specify
Part II. Classical Dynamics. Year
 Part II Year 28 27 26 25 24 23 22 21 20 2009 2008 2007 2006 2005 28 Paper 1, Section I 8B Derive Hamilton s equations from an action principle. 22 Consider a two-dimensional phase space with the Hamiltonian
Part II Year 28 27 26 25 24 23 22 21 20 2009 2008 2007 2006 2005 28 Paper 1, Section I 8B Derive Hamilton s equations from an action principle. 22 Consider a two-dimensional phase space with the Hamiltonian
In the presence of viscous damping, a more generalized form of the Lagrange s equation of motion can be written as
 2 MODELING Once the control target is identified, which includes the state variable to be controlled (ex. speed, position, temperature, flow rate, etc), and once the system drives are identified (ex. force,
2 MODELING Once the control target is identified, which includes the state variable to be controlled (ex. speed, position, temperature, flow rate, etc), and once the system drives are identified (ex. force,
Exam 2 Solutions. PHY2048 Spring 2017
 Exam Solutions. The figure shows an overhead view of three horizontal forces acting on a cargo canister that was initially stationary but that now moves across a frictionless floor. The force magnitudes
Exam Solutions. The figure shows an overhead view of three horizontal forces acting on a cargo canister that was initially stationary but that now moves across a frictionless floor. The force magnitudes
Department of Physics
 Department of Physics PHYS101-051 FINAL EXAM Test Code: 100 Tuesday, 4 January 006 in Building 54 Exam Duration: 3 hrs (from 1:30pm to 3:30pm) Name: Student Number: Section Number: Page 1 1. A car starts
Department of Physics PHYS101-051 FINAL EXAM Test Code: 100 Tuesday, 4 January 006 in Building 54 Exam Duration: 3 hrs (from 1:30pm to 3:30pm) Name: Student Number: Section Number: Page 1 1. A car starts
Physics 101 Lecture 12 Equilibrium and Angular Momentum
 Physics 101 Lecture 1 Equilibrium and Angular Momentum Ali ÖVGÜN EMU Physics Department www.aovgun.com Static Equilibrium q Equilibrium and static equilibrium q Static equilibrium conditions n Net external
Physics 101 Lecture 1 Equilibrium and Angular Momentum Ali ÖVGÜN EMU Physics Department www.aovgun.com Static Equilibrium q Equilibrium and static equilibrium q Static equilibrium conditions n Net external
A. B. C. D. E. v x. ΣF x
 Q4.3 The graph to the right shows the velocity of an object as a function of time. Which of the graphs below best shows the net force versus time for this object? 0 v x t ΣF x ΣF x ΣF x ΣF x ΣF x 0 t 0
Q4.3 The graph to the right shows the velocity of an object as a function of time. Which of the graphs below best shows the net force versus time for this object? 0 v x t ΣF x ΣF x ΣF x ΣF x ΣF x 0 t 0
Physics 351, Spring 2017, Homework #12. Due at start of class, Friday, April 14, 2017
 Physics 351, Spring 2017, Homework #12. Due at start of class, Friday, April 14, 2017 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page at
Physics 351, Spring 2017, Homework #12. Due at start of class, Friday, April 14, 2017 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page at
Exam II Difficult Problems
 Exam II Difficult Problems Exam II Difficult Problems 90 80 70 60 50 40 30 20 10 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Two boxes are connected to each other as shown. The system is released
Exam II Difficult Problems Exam II Difficult Problems 90 80 70 60 50 40 30 20 10 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Two boxes are connected to each other as shown. The system is released
PHYS2330 Intermediate Mechanics Fall Final Exam Tuesday, 21 Dec 2010
 Name: PHYS2330 Intermediate Mechanics Fall 2010 Final Exam Tuesday, 21 Dec 2010 This exam has two parts. Part I has 20 multiple choice questions, worth two points each. Part II consists of six relatively
Name: PHYS2330 Intermediate Mechanics Fall 2010 Final Exam Tuesday, 21 Dec 2010 This exam has two parts. Part I has 20 multiple choice questions, worth two points each. Part II consists of six relatively
The Inverted Pendulum
 Lab 1 The Inverted Pendulum Lab Objective: We will set up the LQR optimal control problem for the inverted pendulum and compute the solution numerically. Think back to your childhood days when, for entertainment
Lab 1 The Inverted Pendulum Lab Objective: We will set up the LQR optimal control problem for the inverted pendulum and compute the solution numerically. Think back to your childhood days when, for entertainment
EXAMPLE: Accelerometer
 EXAMPLE: Accelerometer A car has a constant acceleration of.0 m/s. A small ball of mass m = 0.50 kg attached to a string hangs from the ceiling. Find the angle θ between the string and the vertical direction.
EXAMPLE: Accelerometer A car has a constant acceleration of.0 m/s. A small ball of mass m = 0.50 kg attached to a string hangs from the ceiling. Find the angle θ between the string and the vertical direction.
is conserved, calculating E both at θ = 0 and θ = π/2 we find that this happens for a value ω = ω given by: 2g
 UNIVERSITETET I STAVANGER Institutt for matematikk og naturvitenskap Suggested solutions, FYS 500 Classical Mechanics Theory 2016 fall Set 5 for 23. September 2016 Problem 27: A string can only support
UNIVERSITETET I STAVANGER Institutt for matematikk og naturvitenskap Suggested solutions, FYS 500 Classical Mechanics Theory 2016 fall Set 5 for 23. September 2016 Problem 27: A string can only support
PHY321 Homework Set 10
 PHY321 Homework Set 10 1. [5 pts] A small block of mass m slides without friction down a wedge-shaped block of mass M and of opening angle α. Thetriangular block itself slides along a horizontal floor,
PHY321 Homework Set 10 1. [5 pts] A small block of mass m slides without friction down a wedge-shaped block of mass M and of opening angle α. Thetriangular block itself slides along a horizontal floor,
Classical Dynamics: Question Sheet
 Pt 1B Advanced Physics Lent 5 Classical Dynamics: Question Sheet J. Ellis Questions are graded A to C in increasing order of difficulty. Energy Method 1(B) A ladder of length l rests against a wall at
Pt 1B Advanced Physics Lent 5 Classical Dynamics: Question Sheet J. Ellis Questions are graded A to C in increasing order of difficulty. Energy Method 1(B) A ladder of length l rests against a wall at
Two-Dimensional Rotational Kinematics
 Two-Dimensional Rotational Kinematics Rigid Bodies A rigid body is an extended object in which the distance between any two points in the object is constant in time. Springs or human bodies are non-rigid
Two-Dimensional Rotational Kinematics Rigid Bodies A rigid body is an extended object in which the distance between any two points in the object is constant in time. Springs or human bodies are non-rigid
First Year Physics: Prelims CP1. Classical Mechanics: Prof. Neville Harnew. Problem Set III : Projectiles, rocket motion and motion in E & B fields
 HT017 First Year Physics: Prelims CP1 Classical Mechanics: Prof Neville Harnew Problem Set III : Projectiles, rocket motion and motion in E & B fields Questions 1-10 are standard examples Questions 11-1
HT017 First Year Physics: Prelims CP1 Classical Mechanics: Prof Neville Harnew Problem Set III : Projectiles, rocket motion and motion in E & B fields Questions 1-10 are standard examples Questions 11-1
Momentum. The way to catch a knuckleball is to wait until it stops rolling and then pick it up. -Bob Uecker
 Chapter 11 -, Chapter 11 -, Angular The way to catch a knuckleball is to wait until it stops rolling and then pick it up. -Bob Uecker David J. Starling Penn State Hazleton PHYS 211 Chapter 11 -, motion
Chapter 11 -, Chapter 11 -, Angular The way to catch a knuckleball is to wait until it stops rolling and then pick it up. -Bob Uecker David J. Starling Penn State Hazleton PHYS 211 Chapter 11 -, motion
Chapter 4. Oscillatory Motion. 4.1 The Important Stuff Simple Harmonic Motion
 Chapter 4 Oscillatory Motion 4.1 The Important Stuff 4.1.1 Simple Harmonic Motion In this chapter we consider systems which have a motion which repeats itself in time, that is, it is periodic. In particular
Chapter 4 Oscillatory Motion 4.1 The Important Stuff 4.1.1 Simple Harmonic Motion In this chapter we consider systems which have a motion which repeats itself in time, that is, it is periodic. In particular
Chapter 10 Notes: Lagrangian Mechanics
 Chapter 10 Notes: Lagrangian Mechanics Thus far we have solved problems by using Newton s Laws (a vector approach) or energy conservation (a scalar approach.) In this chapter we approach the subject in
Chapter 10 Notes: Lagrangian Mechanics Thus far we have solved problems by using Newton s Laws (a vector approach) or energy conservation (a scalar approach.) In this chapter we approach the subject in
F1.9AB2 1. r 2 θ2 + sin 2 α. and. p θ = mr 2 θ. p2 θ. (d) In light of the information in part (c) above, we can express the Hamiltonian in the form
 In light of the information in part (c) above, we can express the Hamiltonian in the form") F1.9AB2 1 Question 1 (20 Marks) A cone of semi-angle α has its axis vertical and vertex downwards, as in Figure 1 (overleaf). A point mass m slides without friction on the inside of the cone under the
F1.9AB2 1 Question 1 (20 Marks) A cone of semi-angle α has its axis vertical and vertex downwards, as in Figure 1 (overleaf). A point mass m slides without friction on the inside of the cone under the
2 We alsohave a second constant of the motion, the energy, H = 2 (M + m) _X 2 +mr cos # _X _ #+ 2 mr2 _ # 2 mgr cos # = constant : For small displacem
 _X 2 +mr cos # _X _ #+ 2 mr2 _ # 2 mgr cos # = constant : For small displacem") PHYS 32 Homework Assignment #7: Solutions. The system shown below consists of a block of mass M that can slide without friction, in the x-direction along a horizontal air track. A pendulum hangs from a
PHYS 32 Homework Assignment #7: Solutions. The system shown below consists of a block of mass M that can slide without friction, in the x-direction along a horizontal air track. A pendulum hangs from a
SOLUTIONS, PROBLEM SET 11
 SOLUTIONS, PROBLEM SET 11 1 In this problem we investigate the Lagrangian formulation of dynamics in a rotating frame. Consider a frame of reference which we will consider to be inertial. Suppose that
SOLUTIONS, PROBLEM SET 11 1 In this problem we investigate the Lagrangian formulation of dynamics in a rotating frame. Consider a frame of reference which we will consider to be inertial. Suppose that
EQUIVALENT SINGLE-DEGREE-OF-FREEDOM SYSTEM AND FREE VIBRATION
 1 EQUIVALENT SINGLE-DEGREE-OF-FREEDOM SYSTEM AND FREE VIBRATION The course on Mechanical Vibration is an important part of the Mechanical Engineering undergraduate curriculum. It is necessary for the development
1 EQUIVALENT SINGLE-DEGREE-OF-FREEDOM SYSTEM AND FREE VIBRATION The course on Mechanical Vibration is an important part of the Mechanical Engineering undergraduate curriculum. It is necessary for the development
Elastic strings and springs Mixed exercise 3
 Elastic strings and springs Mixed exercise ( )T cosθ mg By Hooke s law 5mgx T 6a a sinθ a + x () () () a 4 5mg Ifcos θ, T from () 5 8 5mg 5mgx so, from () 8 6a a x 4 If cos θ, then sinθ 5 5 a sinθ from
Elastic strings and springs Mixed exercise ( )T cosθ mg By Hooke s law 5mgx T 6a a sinθ a + x () () () a 4 5mg Ifcos θ, T from () 5 8 5mg 5mgx so, from () 8 6a a x 4 If cos θ, then sinθ 5 5 a sinθ from
Rotational Dynamics. Slide 2 / 34. Slide 1 / 34. Slide 4 / 34. Slide 3 / 34. Slide 6 / 34. Slide 5 / 34. Moment of Inertia. Parallel Axis Theorem
 Slide 1 / 34 Rotational ynamics l Slide 2 / 34 Moment of Inertia To determine the moment of inertia we divide the object into tiny masses of m i a distance r i from the center. is the sum of all the tiny
Slide 1 / 34 Rotational ynamics l Slide 2 / 34 Moment of Inertia To determine the moment of inertia we divide the object into tiny masses of m i a distance r i from the center. is the sum of all the tiny
2.003 Engineering Dynamics Problem Set 4 (Solutions)
") .003 Engineering Dynamics Problem Set 4 (Solutions) Problem 1: 1. Determine the velocity of point A on the outer rim of the spool at the instant shown when the cable is pulled to the right with a velocity
.003 Engineering Dynamics Problem Set 4 (Solutions) Problem 1: 1. Determine the velocity of point A on the outer rim of the spool at the instant shown when the cable is pulled to the right with a velocity
Massachusetts Institute of Technology Department of Physics. Final Examination December 17, 2004
 Massachusetts Institute of Technology Department of Physics Course: 8.09 Classical Mechanics Term: Fall 004 Final Examination December 17, 004 Instructions Do not start until you are told to do so. Solve
Massachusetts Institute of Technology Department of Physics Course: 8.09 Classical Mechanics Term: Fall 004 Final Examination December 17, 004 Instructions Do not start until you are told to do so. Solve
Question 1: Spherical Pendulum
 Question 1: Spherical Pendulum Consider a two-dimensional pendulum of length l with mass M at its end. It is easiest to use spherical coordinates centered at the pivot since the magnitude of the position
Question 1: Spherical Pendulum Consider a two-dimensional pendulum of length l with mass M at its end. It is easiest to use spherical coordinates centered at the pivot since the magnitude of the position
PHYSICS 220. Lecture 15. Textbook Sections Lecture 15 Purdue University, Physics 220 1
 PHYSICS 220 Lecture 15 Angular Momentum Textbook Sections 9.3 9.6 Lecture 15 Purdue University, Physics 220 1 Last Lecture Overview Torque = Force that causes rotation τ = F r sin θ Work done by torque
PHYSICS 220 Lecture 15 Angular Momentum Textbook Sections 9.3 9.6 Lecture 15 Purdue University, Physics 220 1 Last Lecture Overview Torque = Force that causes rotation τ = F r sin θ Work done by torque
Topic 1: Newtonian Mechanics Energy & Momentum
 Work (W) the amount of energy transferred by a force acting through a distance. Scalar but can be positive or negative ΔE = W = F! d = Fdcosθ Units N m or Joules (J) Work, Energy & Power Power (P) the
Work (W) the amount of energy transferred by a force acting through a distance. Scalar but can be positive or negative ΔE = W = F! d = Fdcosθ Units N m or Joules (J) Work, Energy & Power Power (P) the
Chapter 10: Dynamics of Rotational Motion
 Chapter 10: Dynamics of Rotational Motion What causes an angular acceleration? The effectiveness of a force at causing a rotation is called torque. QuickCheck 12.5 The four forces shown have the same strength.
Chapter 10: Dynamics of Rotational Motion What causes an angular acceleration? The effectiveness of a force at causing a rotation is called torque. QuickCheck 12.5 The four forces shown have the same strength.
28. Pendulum phase portrait Draw the phase portrait for the pendulum (supported by an inextensible rod)
") 28. Pendulum phase portrait Draw the phase portrait for the pendulum (supported by an inextensible rod) θ + ω 2 sin θ = 0. Indicate the stable equilibrium points as well as the unstable equilibrium points.
28. Pendulum phase portrait Draw the phase portrait for the pendulum (supported by an inextensible rod) θ + ω 2 sin θ = 0. Indicate the stable equilibrium points as well as the unstable equilibrium points.
Rotational Dynamics continued
 Chapter 9 Rotational Dynamics continued 9.4 Newton s Second Law for Rotational Motion About a Fixed Axis ROTATIONAL ANALOG OF NEWTON S SECOND LAW FOR A RIGID BODY ROTATING ABOUT A FIXED AXIS I = ( mr 2
Chapter 9 Rotational Dynamics continued 9.4 Newton s Second Law for Rotational Motion About a Fixed Axis ROTATIONAL ANALOG OF NEWTON S SECOND LAW FOR A RIGID BODY ROTATING ABOUT A FIXED AXIS I = ( mr 2
Rigid Body Kinetics :: Force/Mass/Acc
 Rigid Body Kinetics :: Force/Mass/Acc General Equations of Motion G is the mass center of the body Action Dynamic Response 1 Rigid Body Kinetics :: Force/Mass/Acc Fixed Axis Rotation All points in body
Rigid Body Kinetics :: Force/Mass/Acc General Equations of Motion G is the mass center of the body Action Dynamic Response 1 Rigid Body Kinetics :: Force/Mass/Acc Fixed Axis Rotation All points in body
COMPLETE ALL ROUGH WORKINGS IN THE ANSWER BOOK AND CROSS THROUGH ANY WORK WHICH IS NOT TO BE ASSESSED.
 BSc/MSci EXAMINATION PHY-304 Time Allowed: Physical Dynamics 2 hours 30 minutes Date: 28 th May 2009 Time: 10:00 Instructions: Answer ALL questions in section A. Answer ONLY TWO questions from section
BSc/MSci EXAMINATION PHY-304 Time Allowed: Physical Dynamics 2 hours 30 minutes Date: 28 th May 2009 Time: 10:00 Instructions: Answer ALL questions in section A. Answer ONLY TWO questions from section
Tutorial Exercises: Incorporating constraints
 Tutorial Exercises: Incorporating constraints 1. A siple pendulu of length l ass is suspended fro a pivot of ass M that is free to slide on a frictionless wire frae in the shape of a parabola y = ax. The
Tutorial Exercises: Incorporating constraints 1. A siple pendulu of length l ass is suspended fro a pivot of ass M that is free to slide on a frictionless wire frae in the shape of a parabola y = ax. The
Classical Mechanics III (8.09) Fall 2014 Assignment 3
 Fall 2014 Assignment 3") Classical Mechanics III (8.09) Fall 2014 Assignment 3 Massachusetts Institute of Technology Physics Department Due September 29, 2014 September 22, 2014 6:00pm Announcements This week we continue our discussion
Classical Mechanics III (8.09) Fall 2014 Assignment 3 Massachusetts Institute of Technology Physics Department Due September 29, 2014 September 22, 2014 6:00pm Announcements This week we continue our discussion
Lecture D10 - Angular Impulse and Momentum
 J. Peraire 6.07 Dynamics Fall 2004 Version.2 Lecture D0 - Angular Impulse and Momentum In addition to the equations of linear impulse and momentum considered in the previous lecture, there is a parallel
J. Peraire 6.07 Dynamics Fall 2004 Version.2 Lecture D0 - Angular Impulse and Momentum In addition to the equations of linear impulse and momentum considered in the previous lecture, there is a parallel
Translational vs Rotational. m x. Connection Δ = = = = = = Δ = = = = = = Δ =Δ = = = = = 2 / 1/2. Work
 Translational vs Rotational / / 1/ Δ m x v dx dt a dv dt F ma p mv KE mv Work Fd / / 1/ θ ω θ α ω τ α ω ω τθ Δ I d dt d dt I L I KE I Work / θ ω α τ Δ Δ c t s r v r a v r a r Fr L pr Connection Translational
Translational vs Rotational / / 1/ Δ m x v dx dt a dv dt F ma p mv KE mv Work Fd / / 1/ θ ω θ α ω τ α ω ω τθ Δ I d dt d dt I L I KE I Work / θ ω α τ Δ Δ c t s r v r a v r a r Fr L pr Connection Translational
Physical Dynamics (PHY-304)
") Physical Dynamics (PHY-304) Gabriele Travaglini March 31, 2012 1 Review of Newtonian Mechanics 1.1 One particle Lectures 1-2. Frame, velocity, acceleration, number of degrees of freedom, generalised coordinates.
Physical Dynamics (PHY-304) Gabriele Travaglini March 31, 2012 1 Review of Newtonian Mechanics 1.1 One particle Lectures 1-2. Frame, velocity, acceleration, number of degrees of freedom, generalised coordinates.
Distance travelled time taken and if the particle is a distance s(t) along the x-axis, then its instantaneous speed is:
 along the x-axis, then its instantaneous speed is:") Chapter 1 Kinematics 1.1 Basic ideas r(t) is the position of a particle; r = r is the distance to the origin. If r = x i + y j + z k = (x, y, z), then r = r = x 2 + y 2 + z 2. v(t) is the velocity; v =
Chapter 1 Kinematics 1.1 Basic ideas r(t) is the position of a particle; r = r is the distance to the origin. If r = x i + y j + z k = (x, y, z), then r = r = x 2 + y 2 + z 2. v(t) is the velocity; v =
Particles and Cylindrical Polar Coordinates
 Chapter 2 Particles and Cylindrical Polar Coordinates TOPICS Here, we discuss the cylindrical polar coordinate system and how it is used in particle mechanics. This coordinate system and its associated
Chapter 2 Particles and Cylindrical Polar Coordinates TOPICS Here, we discuss the cylindrical polar coordinate system and how it is used in particle mechanics. This coordinate system and its associated
Solution Set Five. 2 Problem #2: The Pendulum of Doom Equation of Motion Simple Pendulum Limit Visualization...
 : Solution Set Five Northwestern University, Classical Mechanics Classical Mechanics, Third Ed.- Goldstein November 4, 2015 Contents 1 Problem #1: Coupled Mass Oscillator System. 2 1.1 Normal Modes.......................................
: Solution Set Five Northwestern University, Classical Mechanics Classical Mechanics, Third Ed.- Goldstein November 4, 2015 Contents 1 Problem #1: Coupled Mass Oscillator System. 2 1.1 Normal Modes.......................................
I 2 comω 2 + Rolling translational+rotational. a com. L sinθ = h. 1 tot. smooth rolling a com =αr & v com =ωr
 Rolling translational+rotational smooth rolling a com =αr & v com =ωr Equations of motion from: - Force/torque -> a and α - Energy -> v and ω 1 I 2 comω 2 + 1 Mv 2 = KE 2 com tot a com KE tot = KE trans
Rolling translational+rotational smooth rolling a com =αr & v com =ωr Equations of motion from: - Force/torque -> a and α - Energy -> v and ω 1 I 2 comω 2 + 1 Mv 2 = KE 2 com tot a com KE tot = KE trans
Classical Mechanics Lecture 15
 Classical Mechanics Lecture 5 Today s Concepts: a) Parallel Axis Theorem b) Torque & Angular Acceleration Mechanics Lecture 5, Slide Unit 4 Main Points Mechanics Lecture 4, Slide Unit 4 Main Points Mechanics
Classical Mechanics Lecture 5 Today s Concepts: a) Parallel Axis Theorem b) Torque & Angular Acceleration Mechanics Lecture 5, Slide Unit 4 Main Points Mechanics Lecture 4, Slide Unit 4 Main Points Mechanics
PHYS-2010: General Physics I Course Lecture Notes Section VIII
 PHYS-2010: General Physics I Course Lecture Notes Section VIII Dr. Donald G. Luttermoser East Tennessee State University Edition 2.4 Abstract These class notes are designed for use of the instructor and
PHYS-2010: General Physics I Course Lecture Notes Section VIII Dr. Donald G. Luttermoser East Tennessee State University Edition 2.4 Abstract These class notes are designed for use of the instructor and
Lecture 5 Review. 1. Rotation axis: axis in which rigid body rotates about. It is perpendicular to the plane of rotation.
 PHYSICAL SCIENCES 1 Concepts Lecture 5 Review Fall 017 1. Rotation axis: axis in which rigid body rotates about. It is perpendicular to the plane of rotation.. Angle θ: The angle at which the rigid body
PHYSICAL SCIENCES 1 Concepts Lecture 5 Review Fall 017 1. Rotation axis: axis in which rigid body rotates about. It is perpendicular to the plane of rotation.. Angle θ: The angle at which the rigid body
Physics 141. Lecture 18. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1
 Physics 141. Lecture 18. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1 Physics 141. Lecture 18. Course Information. Topics to be discussed today: A
Physics 141. Lecture 18. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1 Physics 141. Lecture 18. Course Information. Topics to be discussed today: A
Lagrange s Equations of Motion and the Generalized Inertia
 Lagrange s Equations of Motion and the Generalized Inertia The Generalized Inertia Consider the kinetic energy for a n degree of freedom mechanical system with coordinates q, q 2,... q n. If the system
Lagrange s Equations of Motion and the Generalized Inertia The Generalized Inertia Consider the kinetic energy for a n degree of freedom mechanical system with coordinates q, q 2,... q n. If the system