Some Properties of a Recursive Procedure for High Dimensional Parameter Estimation in Linear Model with Regularization
|
|
|
- Justina Gaines
- 5 years ago
- Views:
Transcription

1 Open Journa of Statstcs, 4, 4, 9-93 Pubshed Onne December 4 n ScRes. Some Propertes of a Recurse Procedure for Hgh Dmensona Parameter Estmaton n Lnear Mode wth Reguarzaton Hong Son Hoang, Remy Barae SHOM/HOM/REC, 4 a Gaspard Coros 357 ououse, France Ema: hhoang@shom.fr Receed 8 September 4; resed 6 October 4; accepted Noember 4 Copyrght 4 by authors and Scentfc Research Pubshng Inc. hs work s censed under the Create Commons Attrbuton Internatona Lcense (CC BY). Abstract heoretca resuts reated to propertes of a reguarzed recurse agorthm for estmaton of a hgh dmensona ector of parameters are presented and proed. he recurse character of the procedure s proposed to oercome the dffcutes wth hgh dmenson of the obseraton ector n computaton of a statstca reguarzed estmator. As to dea wth hgh dmenson of the ector of unknown parameters, the reguarzaton s ntroduced by specfyng a pror non-negate coarance structure for the ector of estmated parameters. Numerca exampe wth Monte-Caro smuaton for a ow-dmensona system as we as the state/parameter estmaton n a ery hgh dmensona oceanc mode s presented to demonstrate the effcency of the proposed approach. Keywords Lnear Mode, Reguarzaton, Recurse Agorthm, Non-Negate Coarance Structure, Egenaue Decomposton. Introducton In [] a statstca reguarzed estmator s proposed for an optma near estmator of unknown ector n a near mode wth arbtrary non-negate coarance structure z = Hx () where z s the p-ector obseraton, H s the ( p n) parameters to be estmated, s the p-ector representng the obseraton error. It s assumed obseraton matrx, x s the n-ector of unknown How to cte ths paper: Hoang, H.S. and Barae, R. (4) Some Propertes of a Recurse Procedure for Hgh Dmensona Parameter Estmaton n Lnear Mode wth Reguarzaton. Open Journa of Statstcs, 4,
2 H. S. Hoang, R. Barae, E = E = V () E x = x, E ee = M, E e = N, e : = x x (3) where E ( ) s the mathematca expectaton operator. hroughout ths paper et p, n be any poste nte- gers, the coarance matrx of the jont ector = ( e, ) may be snguar (and hence the mode ()-(3) s caed a near mode wth arbtrary non-negate coarance structure). No partcuar assumpton s made regardng the probabty densty functon of and p, n are any poste ntegers. In [] the optma near estmator for the unknown ector x n the mode ()-(3) s defned as, xˆ = Gz, G = H I V V, V = V I H H (4) where V s the transpose of V, H denotes the pseudo-nerson of H. As n practce a the matrces H, M, N, R and the obseraton ector z are gen ony approxmatey, D= HM,, NRz,, we are gen ther δ -approxmatons nstead of data set δ hence the resutng estmate xˆ xˆ ( D ) (,,,, ) D δ = H δ M δ N δ R δ z δ (5) δ =. δ As shown n [], there are stuatons when the error e: = xˆ xˆ between the true estmate ˆx and ts perturbed ˆx δ may be ery arge een for sma data error δ. he reguarzaton procedure has been proposed n [] to oercome ths dffcuty. In ths paper we are nterested n obtanng a smpe recurse agorthm for computaton of ˆx subject to the stuaton when n or p or/and n, p may be ery hgh. hs probem s ery mportant for many practca appcatons. As exampe, consder data assmaton probems n meteoroogy and oceanography []. For typca data set n oceanography, at each assmaton nstant we 4 5 p, hae the obseraton ector wth compute the estmate (4) usng standard numerca methods. We w show that there exsts a smpe agorthm to oercome these dffcutes by expotng a recurse character of the agorthm wth an approprate reguarzaton n the form of the pror coarance matrx M for the ector of unknown parameters x. 6 7 n. Under such condtons t s unmagnabe to. Smpe Recurse Method for Estmatng the Vector of Parameters.. Probem Statement: Free-Nose Obseratons Frst consder the mode () and assume that =. We hae then the system of near equatons z = Hx, z R p, n x R (6) p and z R for the nose-free obseratons z. Suppose that the system (6) s compatbe,.e. there exsts x such that Hx z. In what foows et (,, ) = p, H ( h,, ) hp z z z =,.e. z s the th component of z, h s the th row-ector of H. he probem s to obtan a smpe recurse procedure to compute a souton of the system (6) when the dmenson of z s ery hgh... Iterate Procedure o fnd a souton to Equaton (6), et us ntroduce the foowng system of recurse equatons [ ] x = x K z h x, x = x, =,, p (7a) K = M h h M h (7b) M = M K h M, =,,, M s gen (7c) Menton that the system s compatbe f z R[ H] where [ ] R H s a near space spanned by the coumns 9
3 H. S. Hoang, R. Barae of H. hroughout of the paper, for defnteness, et h, =,, p. heorem. Suppose the system (6) s compatbe. hen for any fnte x and symmetrc poste defnte (SPD) matrx M we hae Hxp = z. In order to proe heorem we need Lemma. he foowng equates hod Proof. By nducton. We hae for j =, hm =, =,, j (8) j hm = hm hkhm = snce hk = hm h hm h =. Let the statement be true for some < < p. We show now that t s true aso for. As the statement s true for, t mpes hm =, =,,. We hae to proe hm =, =,, Substtutng M = M K h M nto hm, takng nto account the form of K one sees that as hm =, =,, t mpes hm =, =,, (End of Proof). Lemma. he foowng equates hod hx Proof. By nducton. We hae for = z. hx = z, =,, j (9) j j =, hx = h x K ( z hx ). As hk =, t s edent that Let the statement be true for some < < p. We show now that t s true aso for. As the statement s true for, t mpes hx = z, =,,. We hae to proe hx = z, =,,. From the defnton of x, Howeer from Lemma, as hx = h x K z h x = z hk z h x hm =, [ ] hk = hm h M h M = for a. (End of Proof). Proof of heorem. heorem foows from Lemma snce under the condtons of heorem, from Equaton (9) for j = p t foows hx p = z, =,, p or Hxp = z. (End of Proof). Coroary. Suppose the rows of H : = h,, h are neary ndependent. hen under condtons of heorem, rank [ ] M = n. Proof. By nducton. he fact that for =, hm = mpes at east the nu subspace of M has one nonzero eement hence dm R( M ) n. We show now that t s mpossbe that R( M ) Suppose that dm R( M ) n n, n =,3, For smpcty, et a such that any eement from the subspace neary ndependent ectors,, an on the bass of these n eements. As to the matrx M : = M h hm hm h ts subspace R( M ) has the dmenson hence any eement from R( M ) b. hus any eement from the subspace : dm < n. n =. It means that there exst n R M can be represented can be represented on the bass of some ector R M wth M = M M can be represented as a near combnaton of n eements a,, an, b. On the other hand, as M M = M s non-snguar, any eement of R( M ) must be represented as a near combnaton of n neary ndependent ectors. It contradcts the fact that any eement from R( M ) coud be wrtten as a near combnaton of n neary ndependent eements. We concude that t s mpossbe dm R( M ) < n hence dm R( M ) = n. he same argument s true for n = 3, 4,, n. Suppose now Coroary s true for and we hae to proe that t hods for : =. For 93
4 H. S. Hoang, R. Barae :, M = Mh h M h Mh M = M M hm =, =,, hence (as a the rows of H are neary ndependent). It fo- we hae dm R ( M ) = n, dm[ M ] =. From Lemma t foows the nu subspace N[ M ] has the dmenson ows that the dmenson of the subspace RM [ ] s at east ess or equa to n. By the same way as proed for = one can show that t s mpossbe dm R M = n (End of Proof). dm R M < n hence Comment. By erfyng the rank of M, Coroary aows us to check f the computer code s correct. In partcuar f H s non-snguar, at the end of the terate procedure the matrx M n shoud be zero. he recurse Equatons (7a)-(7c) then yed the unque souton of the equaton z = Hx after n teratons. Usng the resut (8) n Lemma, t s easy to see that: Coroary. Suppose h s neary dependent on h,, h. hen n (7), M = M. Coroary 3. Suppose h,, h are neary ndependent, h s neary dependent on h,, h. hen under the condtons of heorem, rank R( M ) = n. Coroary 3 foows from the fact that when h s neary dependent on h,, h from Coroary, M = M and hence by Coroary, rank R( M ) = n. Comment. Equaton (7c) for M s smar to that gen n (3.4.) n [3] snce from Coroary t foows automatcay M = M f h s neary dependent on h,, h. her dfference s that n (7c) the nta M may be any SPD matrx whereas n (3.4.) of [3] t s assumed M = I. In the next secton we sha show that the fact M may be any SPD matrx s mportant to obtan the optma n mean squared estmator for x. 3. Optma Propertes of the Souton of (7) 3.. Reguarzed Estmate heorem says ony that Equatons (7a)-(7c) ge a souton to (). We are gong now to study the queston on whether a souton of Equatons (7a)-(7c) s optma, and f yes, n what sense? Return to Equatons ()-(3) and assume that V =, N=. he optma estmator (4) s then gen n the form ˆx x MH HMH z Hx = where H s the pseudo-nerson of H. Consder frst the equaton z = hx. In ths case, () yeds the optma estmator (obtaned on the bass of the frst obseraton) = ˆx x Mh h Mh z h x and one can proe aso that the mean square error for ˆx s equa to = M M Mh h Mh h M If we appy Equaton (3.4.) n [3], M = I then nstead of ˆx we hae () (a) (b) xˆ = h hh z = h z, M = I h hh h () For smpcty, et x =. Comparng Equaton () wth Equaton () shows that f ˆx s the orthogona projecton of x onto the subspace spanned by h, the estmate ˆx beongs to the subspace spanned by M. hus the agorthm () takes nto account the fact that we known a pror x beongs to the space RM [ ]. hs fact s ery mportant when the number of obseratons p s much ess than the number of the estmated parameters n as t happens n oceanc data assmaton: today usuay p =, n = In [4] a smar queston has been studed whch concerns the choce of adequate structure for the Error Coarance Matrx (ECM) M. We proe now a more strong resut sayng that a the estmates x, =,, are projected onto the space RM [ ]. heorem. Consder the agorthm (7). Suppose x R M. hen a the estmates x, =,, beong to 94
5 H. S. Hoang, R. Barae the space spanned by the coumns of M,.e. x R M. Proof. For = the statement s edent as shown aboe. Suppose the statement s true for some. We w show that t s true aso for : =. Reay as x R M, t s suffcent to show that K ζ R M, ζ : = z h x. From x R M, x = x Kζ, as x R M t foows that K ζ R M. But coumns of ζ = ζ K Mh hmh hence the M must beong to R M. Agan from the equaton for M n Equaton (7) we hae M R M. It proes K ζ R M snce M R M (End of proof). heorem says that by specfyng M R M the agorthm (7) w produce the estmates beongng to the subspace R M. Specfcaton of the pror matrx M pays the most mportant task f we want the agorthm (7) to produce the estmate wth hgh quaty. Comment 3 ) If x does not beong to R M, by consderng e : = x x n pace of x heorem 3 remans ad for the agorthm (7) wrtten for e. In ths case at the frst teraton, as e: = x x represents the pror error for x, t s natura for the agorthm to seek the correcton (.e., the estmate for the error e: = x x ) beongng to the space R M. In what foows, uness otherwse stated, for smpcty we assume x =. ) heorem says that there s a possbty to reguarze the estmate when the number of obseratons s ess than the number of estmated parameters by choosng M = M. hus the agorthm can be consdered as that whch fnds the souton Hx = z under the constrant x R M. In the procedure n Abert (97) puttng M = I means that there s no constrant on x hence the best way to do s to project x orthogonay onto subspace of R H. 3.. Mnma Varance Estmate Suppose x s a random arabe hang the mean x and coarance matrx M. We hae then the foowng resut. heorem 3. Suppose x s a random arabe hang the mean x and the coarance matrx M. hen x generated by the recurse Equaton (7) s an unbased and mnmum arance estmate for x n the cass of a unbased estmates neary dependent on x and z,, z. Proof. Introduce for the system (6), and the cass of a estmates or he condton for unbasedness of x( AB, ) from whch foows A I BH z : = z,, z, H : = h,, h (3) x neary dependent on x and z,, z s (, ) x A B = Ax Bz (, ) ( ). E x A B = E Ax Bz = x A BH x = x x R, =. Substtutng ths reaton nto x ( A, B) Ax Bz x ( B) = x B z Hx It means that a the estmate n Equaton (4) s unbased. Consder the mnmzaton probem We hae = trace argmn, : = J B E ee e x x B B n = eads to (4) 95
6 H. S. Hoang, R. Barae E ee = E x x B z H x x x B z H x = M MH B BH M BH MH B,, akng the derate of J( B ) wth respect to B mpes the foowng equaton for fndng B, from whch foows one of the soutons BH MH = MH,,,, B = MH H MH If now nstead of Equaton (3) we consder the system, z= Hx, E = α I, E x x = and repeat the same proof, one can show that the unbased mnmum arance estmate for x s gen by = xˆ α x Kα z Hx,, K α = MH HMH αi Usng the propertes of the pseudo-nerse (heorem 3.8 [3]), one can proe that hus for a ery sma x B. α > the estmate ( α ) m K B ˆ (5) (6a) (6b) α = (7) x α s unbased mnmum arance whch can be made as cose as possbe to ( ) On the other hand, appyng Lemma n [5] for the case of uncorreated sequence { } xˆ ( α) = xˆ ( α) k ( α) z h xˆ ( α) Lettng α one comes to x 3.3. Nosy Obseratons, one can show that, (8a) k α = M α h h M α h α, (8b) ˆ ( α) ( α) ( α) ( α) M = M k h M (8c) M α x n (7) (End of proof). α = M (8d) he agorthm (8a)-(8d) thus yeds an unbased mnma arance (UMV) estmates for x n the stuaton when α represents the obseraton nose arance. We want to stress that these agorthms produce the UMV estmates ony f M = M where M s the true coarance of the error e: = x x before arrng z, =,, Very Hgh Dmenson of x : Smpfed Agorthms In the fed of data assmaton n meteoroogy and oceanography usuay the state ector x s of ery hgh 6 7 dmenson, the orders of []. hs happens because x s a coecton of seera arabes defned n the three dmensona grd. If the agorthm (7) aows to oercome the dffcutes wth the hgh dmenson of the obseraton ector z (each teraton noes one component of z ), due to hgh dmenson of x, t s 4 mpossbe to hande Equaton (7c) to eauate the matrces M (wth the number of eements ). hs secton s deoted to the queston on how one can oercome such dffcutes. Let us consder the egen-decomposton for M [6] M In (9) the coumns of U are the egenectors of M and D s dagona wth the eements λ λ λn at the dagona the egen-aues of M. Let U = [ U, U], D = dag [ D, D]. If we put n the agorthms (7) or (8) M = U DU, then the agorthm (7), for exampe, w yed the best estmate for x = UDU (9) 96
7 projected n the subspace RU ( ). Let U U( m) = has the dmenson n m, m n. Let M m = U md mu m Man heoretca Resuts heorem 4 Consder two agorthms of the type (7) subject to two matrces where the coumns of nequates hod M = M m = U m D m U m, =, U m consst of H. S. Hoang, R. Barae m eadng egenectors of M, m m. hen the foowng E e m ˆ E e m, m m, e m = x m x, =, xˆ ( m ) s the estmate produced by the agorthm (7) subject to M M ( m ) : () =, where the strct nequaty takes pace f λ m >. Proof Wrte the representaton of x n the terms of decomposton of M on the bass of ts egenectors (for smpcty, et x = ), x UD y Ly L UD M UDU = =, : =, = () where y s of zero mean and has the coarance matrx I. Let y s a sampe of y. heorem 3 states that for a x : = Ly, the agorthm (7) w yed the estmate wth the mnma arance. In what foows we ntroduce the notaton: M = UDU the true ECM of x ; M m = U mdmu m a truncated coarance comng from M ; M the ntazed ECM n the agorthm (7a)-(7c). he sampes x of x are comng from a arabe hang zero mean and coarance M. x ( m ) sampe comng from a arabe hang zero mean and coarance M ( m ). here are the foowng dfferent cases ) M = M : By heorem 3 the agorthm (7) w produce the estmates of mnma arance for a x m. ) M = M ( m), m< n, λ m > : a) For sampes beongng to R U ( m) : he estmates w be of mnma arance. s true aso f Equaton (7) s apped to n b) For sampes beongng to R R U( m) w not be of mnma arance. hus n the mean sense (.e. beongng to n,, ˆ R but not to R U( m) E e n E e m m n e m = x m x M M m M = M m, m m n, we hae a) M = M ( m ) : ) x R M ( m ) : the estmates are of mnma arance; 3) Consder two ntazatons = and n ) x R R M ( m ) b) M M ( m ) ) of mnma arance for x R M ( m ) : the estmates are not of mnma arance. = : he agorthm (7) w produce the estmates ; ) of mnma arance for x R M ( m ) R M ( m ) ; x ; hs ): he estmates () λ m >. In the same way 97
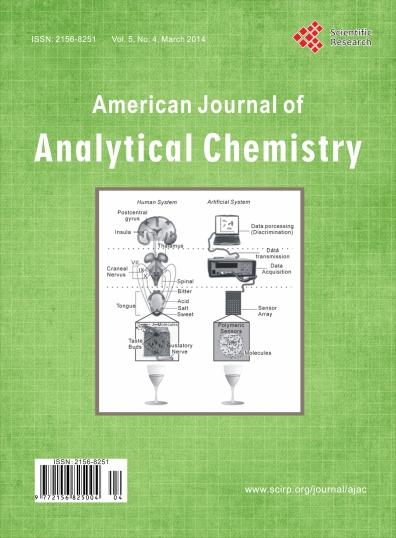
8 H. S. Hoang, R. Barae ) not of mnma arance for x R M ( n) R M ( m ) hus n the mean sense. E e m ˆ E e m, m m, e m = x m x, =, (3) Smpfed Agorthm heorem 5 =, m n. Consder the agorthm (7) subject to M : = M ( m), M( m) U( mdmu ) ( m) hen ths agorthm can be rewrtten n the form m x = U m xe, xe R, (4a) xe = xe Ke z he xe, x = x, =,,, p (4b) = ( ) ( ) ( ) ( ) Ke Me he he Me he, (4c) ( ), h = h U m M = D m (4d) e e m It s seen that n the agorthm (4a)-(4d), the estmate xe R beongs to the near space of dmenson m. In data assmaton, t happens that the dmenson of x may be ery hgh but there s ony some eadng drectons (eadng egenectors of M representng the drectons of most rapd growth of estmaton error) to be captured. hus the agorthm (4a)-(4d) s qute adapted for song such probems: frst the nta coarance M s constructed from physca consderatons or numerca mode, and next to decompose t (numercay) to obtan an approxmated decomposton M m = U mdmu m, m n Menton that the erson (4a)-(4d) s ery cosed to that studed n [7] for ensurng a stabty of the fter. 4. Numerca Exampe Consder the system () subject to the coarance M, M = Here we assume that the st and 3rd components of x s obsered,.e. Numerca computaton of egendecomposton of z = Hx, H = M = UDU yeds E 6.66 U = [ u, u, u3] = E E E 5 (5) (6) (7) D = dag (.5,.64,.6) (8) he agorthm (4a)-(4d) s apped subject to three coarance matrces M M( m) U( mdmu ) ( m) = =, m =,, 3. hey are denoted as ALG(m). In Fgure we show the numerca resuts obtaned from the Monte-Caro smuaton. here are sampes smuatng the true x whch are generated by a random generator dstrbuted accordng to the norma dstrbuton N(./ xm, ). he cures n Fgure represent rms of the estmaton error e= x xˆ obtaned by dfferent agorthms. Here the cures m =, m =, m = 3 correspond to the three agorthms ALG(), ALG(), ALG(3). 98
9 H. S. Hoang, R. Barae Fgure. Performance (rms) of the agorthm (4) subject to dfferent projecton subspaces. he cure Id denotes the 4th agorthm ALG (4) whch s run subject to M = I dentty matrx. hs s equaent to the orthogona projecton (usng the pseudo-nerson of H ) of z nto the subspace R H. As seen from Fgure, the estmaton error s hghest n ALG (). here s practcay no dfference between ALG () and ALG (3) whch are capabe of decreasng consderaby the estmaton error (5%) compared to ALG (). As to the ALG (4), ts performance s stuated between ALG () and ALG (). hs experment confrms the theoretca resuts and demonstrates that f we are gen a good pror nformaton on the estmated parameters, there exsts a smpe way to mproe the quaty of the estmate by appropratey ntroducng the pror nformaton n the form of the reguarzaton matrx M. he resuts produced by ALG () and ALG (4) show aso that when the pror nformaton s nsuffcenty rch, the agorthm naturay produces the estmates of poor quaty. In such stuaton, smpe appyng orthogona projecton can yed a better resut. For the present exampe, the reason s that usng the nd mode u aows to capture the mportant nformaton contaned n the second obseraton. Ignorng t (as does ALG ()) s equaent to gnorng the second obseraton z. As to the thrd mode u 3, t has a weak mpact on the estmaton snce the correspondng egenaue λ3 s sma. hat expans why ALG () and ALG (3) hae produced amost the same resuts. 5. Experment wth Oceanc MICOM Mode 5.. MICOM Mode In ths secton we w show mportance of the reguarzaton factor n the form of the pror coarance M n the desgn of a fter for systems of ery hgh dmenson. he numerca mode used n ths experment s the MICOM (Mam Isopycnc Coordnate Ocean Mode) whch s exacty as that presented n [8]. We reca ony that the mode confguraton s a doman stuated n the North Atantc from 3 N to 6 N and 8 W to 44 W. he grd spacng s about. n ongtude and n attude, requrng the horzonta mesh =,,4 ; j =,,8. he dstance between two ponts x = x x km, y = y y km. he number of ayers n the mode n = 4. We note that the state of the mode x: = ( hu,, ) where h= h (, j, ) s the thckness of the th ayer, u= u(, j, ), = (, j, ) are two eocty components. he true ocean s smuated by runnng the mode from cmatoogy durng two years. Each ten days the sea-surface heght (SSH) are stored at the grd ponts o =,,,4 ; j o =,,,8 whch are consdered as obseratons n the assmaton experment. he sequence of true states w be aaabe and aows us to compute the estmaton errors. hus the obseraton operator H s constant at a assmaton nstants. he assmaton experment conssts of usng the SSH to correct the mode souton, whch s ntazed by some arbtrary chosen state resutng from the contro run. 5.. Dfferent Fters he dfferent fters are mpemented to estmate the oceanc crcuaton. It s we known that determnng the 99
10 H. S. Hoang, R. Barae fter gan s one of the most mportant tasks n the desgn of a fter. As for the consdered probem t s mpossbe to appy the standard Kaman fter [9] snce n the present experment, n = O( ) and the number of 6 eements n the ECM s of order O( n ). At each assmaton nstant, the estmate for the system state n a fters s computed n the form () wth the correspondng ECM M. As the number of obseratons p = 5 s argey nferor to the dmenson of the system state, the choce of M as a reguarzaton factor has a great mpact on the quaty of the produced estmates. In ths assmaton experment the foowng fters w be empoyed. Frst the Predcton Error Fter (PEF) whose ECM s obtaned on the bass of eadng rea Schur ectors [8]. Paraey two other fters, one s the Cooper-Hanes fter (CHF) [] and another s an EnOI (Ensembe based Optma Interpoaton) fter [] w be used. Menton that the ECM n the CHF s obtaned on the bass of the prncpe of a ertca rearrangement of water parces (see aso [8]). he method conseres the water masses and mantans geostrophy. he man dfference between PEF and EnOI s yng n the way to generate the ensembes of Predcton Error (PE) sampes. In the PEF, the ensembe of PE sampes s generated usng the sampng procedure descrbed n [8] (and t w be denoted as En(PEF)). As for the EnOI, the ensembe of background errors sampes (the term used n [8]) and w be denoted by En(EnOI)) w be used. he eements of En(EnOI) are constructed accordng to the method n []. It conssts of usng -year mean of true states as the background fed and the error sampes are cacuated as dfferences between nddua -day true states durng ths perod and the background. Accordng to Coroary 4. n [4], usng the hypothess on separabe ertca-horzonta structure for the ECM, we represent M = M Mh where M, M h are the ECM of ertca and horzonta arabes respectey. In the case of sea-surface heght obseratons, from the representaton M = M Mh, the gan fter can be represented n the form [ ] K = K K, K = k, k, k, k h 3 4 where denotes the Kronecker product. he gan K aows the correcton aaabe at the surface to propagate nto a ertca subsurface ayers. As to K h, t represents an operator of (horzonta) optma nterpoaton whch nterpoates the obseratons oer a horzonta grd ponts at the surface. Menton that the eements of M and the correaton ength parameter n M h are estmated by mnmzng the mean dstance between the data matrx M d and M usng a smutaneous perturbaton stochastc approxmaton agorthm []. he data matrx M d s obtaned from sampes of the eadng rea Schur ectors as descrbed n [8]. Fgure shows the estmated ertca coeffcents k, =,,3,4 obtaned on the bass of the ECM spanned by the eements of En(PEF). It s seen that the estmates conerge qute qucky. he estmated ertca gan coeffcents K [ ] = k, k, k3, k4 computed on the bass of the ECM from two ensembes En(PEF), En(EnOI) at the teraton t = 7 are pef [ 44.59, 9.53, 34.44, 8.] K = (9a) eno [ 34.4, 7.53, 3.3,.] K = (9b) eno We remark that a the gan coeffcents n two fters are of dentca sgn but the eements of K are of pef much ess magntudes than that of K. It means that the EnOI w make ess correcton (compared to the PEF) to the forecast estmate. wo gans n (9a), (9b) w be used n the two fters PEF and EnOI to assmate the obseratons. he ertca gan coeffcents for the CHF are taken from [8] and are equa to 5.3. Numerca Resuts chf [ 85.97,,, 84.97] K = (3) In Fgure 3 we show the nstantaneous arances of the SSH nnoaton produced by three fters EnOI, CHF and PEF. It s seen that ntazed by the same nta state, f the nnoaton arances n EnOI, CHF hae a tendency to ncrease, ths error remans stabe for the PEF durng a assmaton perod. At the end of assmaton, the PE n the CHF s more than two tmes greater than that produced by the PEF. he EnOI has produced poor estmates, wth error about two tmes greater than the CHF has done. For the eocty estmates, the same tendency s obsered as seen from Fgure 4 for the surface eocty PE 93
11 H. S. Hoang, R. Barae Fgure. Vertca gan coeffcents obtaned durng appcaton of the Sampng Procedure for ayer thckness correcton durng teratons. Fgure 3. Performance comparson of EnOI, CHF and PEF: Varance of SSH nnoaton resutng from the fters EnOI, CHF and PEF. Fgure 4. he predcton error arance of the u eocty component at the surface (cm/s) resutng from the EnOI, CHF and PEF. errors. hese resuts proe that the choce of ECM as a reguarzaton factor on the bass of members of the En(PEF) aows to much better approach the true system state compared to that based on the sampes taken from En(EnOI) or to that constructed on the bass of the physca consderaton as n the CHF. he reason s that the members of En(PEF) by constructon [8] are sampes of the drectons aong whch the predcton error ncreases 93
12 H. S. Hoang, R. Barae most rapdy. In other words, the correcton n the PEF s desgned to capture the prncpa mportant components n the decomposon of the coarance of the predcton error. 6. Concuson We hae presented some propertes of an effcent recurse procedure for computaton of a statstca reguarzed estmator for the optma near estmator n a near mode wth arbtrary non-negate coarance structure. he man objecte of ths paper s to obtan an agorthm whch aows oercomng the dffcutes concerned wth hgh dmensons of the obseraton ector as we as that of the estmated ector of parameters. As t was seen, the recurse nature of the proposed agorthm aows deang wth hgh dmenson of the obseraton ector. By ntazaton of the assocated matrx equaton by a ow rank approxmaton coarance whch accounts for ony frst eadng components of the egenaue decomposton of the pror coarance matrx, the proposed agorthm permts to reduce greaty the number of estmated parameters n the agorthm. he effcency of the proposed recurse procedure has been demonstrated by numerca experments, wth the systems of sma and ery hgh dmenson. References [] Hoang, H.S. and Barae, R. (3) A Reguarzed Estmator for Lnear Regresson Mode wth Possby Snguar Coarance. IEEE ransactons on Automatc Contro, 58, [] Daey, R. (99) Atmospherc Data Anayss. Cambrdge Unersty Press, New York. [3] Abert, A. (97) Regresson and the Moore-Penrose Pseudo-Inerse. Academy Press, New York. [4] Hoang, H.S. and Barae, R. (4) A Low Cost Fter Desgn for State and Parameter Estmaton n Very Hgh Dmensona Systems. Proceedngs of the 9th IFAC Congress, Cape own, 4-9 August 4, [5] Hoang, H.S. and Barae, R. () Approxmate Approach to Lnear Fterng Probem wth Correated Nose. Engneerng and echnoogy, 5, -3. [6] Goub, G.H. and an Loan, C.F. (996) Matrx Computatons. 3rd Edton, Johns Hopkns Unersty Press, Batmore. [7] Hoang, H.S., Barae, R. and aagrand, O. () On the Desgn of a Stabe Adapte Fter for Hgh Dmensona Systems. Automatca, 37, [8] Hoang, H.S. and Barae, R. () Predcton Error Sampng Procedure Based on Domnant Schur Decomposton. Appcaton to State Estmaton n Hgh Dmensona Oceanc Mode. Apped Mathematcs and Computaton, 8, [9] Kaman, R.E. (96) A New Approach to Lnear Fterng and Predcton Probems. Journa of Basc Engneerng, 8, [] Cooper, M. and Hanes, K. (996) Atmetrc Assmaton wth Water Property Conseraton. Journa of Geophysca Research,, [] Greensade, D.J.M. and Young, I.R. (5) he Impact of Atmeter Sampng Patterns on Estmates of Background Errors n a Goba Wae Mode. Journa of Atmospherc and Oceanc echnoogy, [] Spa. J.C. () Adapte Stochastc Approxmaton by the Smutaneous Perturbaton Method. IEEE ransactons on Automatc Contro, 45,














13
Cyclic Codes BCH Codes
 Cycc Codes BCH Codes Gaos Feds GF m A Gaos fed of m eements can be obtaned usng the symbos 0,, á, and the eements beng 0,, á, á, á 3 m,... so that fed F* s cosed under mutpcaton wth m eements. The operator
Cycc Codes BCH Codes Gaos Feds GF m A Gaos fed of m eements can be obtaned usng the symbos 0,, á, and the eements beng 0,, á, á, á 3 m,... so that fed F* s cosed under mutpcaton wth m eements. The operator
Associative Memories
 Assocatve Memores We consder now modes for unsupervsed earnng probems, caed auto-assocaton probems. Assocaton s the task of mappng patterns to patterns. In an assocatve memory the stmuus of an ncompete
Assocatve Memores We consder now modes for unsupervsed earnng probems, caed auto-assocaton probems. Assocaton s the task of mappng patterns to patterns. In an assocatve memory the stmuus of an ncompete
ON AUTOMATIC CONTINUITY OF DERIVATIONS FOR BANACH ALGEBRAS WITH INVOLUTION
 European Journa of Mathematcs and Computer Scence Vo. No. 1, 2017 ON AUTOMATC CONTNUTY OF DERVATONS FOR BANACH ALGEBRAS WTH NVOLUTON Mohamed BELAM & Youssef T DL MATC Laboratory Hassan Unversty MORO CCO
European Journa of Mathematcs and Computer Scence Vo. No. 1, 2017 ON AUTOMATC CONTNUTY OF DERVATONS FOR BANACH ALGEBRAS WTH NVOLUTON Mohamed BELAM & Youssef T DL MATC Laboratory Hassan Unversty MORO CCO
A finite difference method for heat equation in the unbounded domain
 Internatona Conerence on Advanced ectronc Scence and Technoogy (AST 6) A nte derence method or heat equaton n the unbounded doman a Quan Zheng and Xn Zhao Coege o Scence North Chna nversty o Technoogy
Internatona Conerence on Advanced ectronc Scence and Technoogy (AST 6) A nte derence method or heat equaton n the unbounded doman a Quan Zheng and Xn Zhao Coege o Scence North Chna nversty o Technoogy
MARKOV CHAIN AND HIDDEN MARKOV MODEL
 MARKOV CHAIN AND HIDDEN MARKOV MODEL JIAN ZHANG JIANZHAN@STAT.PURDUE.EDU Markov chan and hdden Markov mode are probaby the smpest modes whch can be used to mode sequenta data,.e. data sampes whch are not
MARKOV CHAIN AND HIDDEN MARKOV MODEL JIAN ZHANG JIANZHAN@STAT.PURDUE.EDU Markov chan and hdden Markov mode are probaby the smpest modes whch can be used to mode sequenta data,.e. data sampes whch are not
2.3 Nilpotent endomorphisms
 s a block dagonal matrx, wth A Mat dm U (C) In fact, we can assume that B = B 1 B k, wth B an ordered bass of U, and that A = [f U ] B, where f U : U U s the restrcton of f to U 40 23 Nlpotent endomorphsms
s a block dagonal matrx, wth A Mat dm U (C) In fact, we can assume that B = B 1 B k, wth B an ordered bass of U, and that A = [f U ] B, where f U : U U s the restrcton of f to U 40 23 Nlpotent endomorphsms
Research on Complex Networks Control Based on Fuzzy Integral Sliding Theory
 Advanced Scence and Technoogy Letters Vo.83 (ISA 205), pp.60-65 http://dx.do.org/0.4257/ast.205.83.2 Research on Compex etworks Contro Based on Fuzzy Integra Sdng Theory Dongsheng Yang, Bngqng L, 2, He
Advanced Scence and Technoogy Letters Vo.83 (ISA 205), pp.60-65 http://dx.do.org/0.4257/ast.205.83.2 Research on Compex etworks Contro Based on Fuzzy Integra Sdng Theory Dongsheng Yang, Bngqng L, 2, He
Supplementary Material: Learning Structured Weight Uncertainty in Bayesian Neural Networks
 Shengyang Sun, Changyou Chen, Lawrence Carn Suppementary Matera: Learnng Structured Weght Uncertanty n Bayesan Neura Networks Shengyang Sun Changyou Chen Lawrence Carn Tsnghua Unversty Duke Unversty Duke
Shengyang Sun, Changyou Chen, Lawrence Carn Suppementary Matera: Learnng Structured Weght Uncertanty n Bayesan Neura Networks Shengyang Sun Changyou Chen Lawrence Carn Tsnghua Unversty Duke Unversty Duke
Chapter 5. Solution of System of Linear Equations. Module No. 6. Solution of Inconsistent and Ill Conditioned Systems
 Numercal Analyss by Dr. Anta Pal Assstant Professor Department of Mathematcs Natonal Insttute of Technology Durgapur Durgapur-713209 emal: anta.bue@gmal.com 1 . Chapter 5 Soluton of System of Lnear Equatons
Numercal Analyss by Dr. Anta Pal Assstant Professor Department of Mathematcs Natonal Insttute of Technology Durgapur Durgapur-713209 emal: anta.bue@gmal.com 1 . Chapter 5 Soluton of System of Lnear Equatons
Image Classification Using EM And JE algorithms
 Machne earnng project report Fa, 2 Xaojn Sh, jennfer@soe Image Cassfcaton Usng EM And JE agorthms Xaojn Sh Department of Computer Engneerng, Unversty of Caforna, Santa Cruz, CA, 9564 jennfer@soe.ucsc.edu
Machne earnng project report Fa, 2 Xaojn Sh, jennfer@soe Image Cassfcaton Usng EM And JE agorthms Xaojn Sh Department of Computer Engneerng, Unversty of Caforna, Santa Cruz, CA, 9564 jennfer@soe.ucsc.edu
Nested case-control and case-cohort studies
 Outne: Nested case-contro and case-cohort studes Ørnuf Borgan Department of Mathematcs Unversty of Oso NORBIS course Unversty of Oso 4-8 December 217 1 Radaton and breast cancer data Nested case contro
Outne: Nested case-contro and case-cohort studes Ørnuf Borgan Department of Mathematcs Unversty of Oso NORBIS course Unversty of Oso 4-8 December 217 1 Radaton and breast cancer data Nested case contro
A DIMENSION-REDUCTION METHOD FOR STOCHASTIC ANALYSIS SECOND-MOMENT ANALYSIS
 A DIMESIO-REDUCTIO METHOD FOR STOCHASTIC AALYSIS SECOD-MOMET AALYSIS S. Rahman Department of Mechanca Engneerng and Center for Computer-Aded Desgn The Unversty of Iowa Iowa Cty, IA 52245 June 2003 OUTLIE
A DIMESIO-REDUCTIO METHOD FOR STOCHASTIC AALYSIS SECOD-MOMET AALYSIS S. Rahman Department of Mechanca Engneerng and Center for Computer-Aded Desgn The Unversty of Iowa Iowa Cty, IA 52245 June 2003 OUTLIE
3. Stress-strain relationships of a composite layer
 OM PO I O U P U N I V I Y O F W N ompostes ourse 8-9 Unversty of wente ng. &ech... tress-stran reatonshps of a composte ayer - Laurent Warnet & emo Aerman.. tress-stran reatonshps of a composte ayer Introducton
OM PO I O U P U N I V I Y O F W N ompostes ourse 8-9 Unversty of wente ng. &ech... tress-stran reatonshps of a composte ayer - Laurent Warnet & emo Aerman.. tress-stran reatonshps of a composte ayer Introducton
Research Article H Estimates for Discrete-Time Markovian Jump Linear Systems
 Mathematca Probems n Engneerng Voume 213 Artce ID 945342 7 pages http://dxdoorg/11155/213/945342 Research Artce H Estmates for Dscrete-Tme Markovan Jump Lnear Systems Marco H Terra 1 Gdson Jesus 2 and
Mathematca Probems n Engneerng Voume 213 Artce ID 945342 7 pages http://dxdoorg/11155/213/945342 Research Artce H Estmates for Dscrete-Tme Markovan Jump Lnear Systems Marco H Terra 1 Gdson Jesus 2 and
The Order Relation and Trace Inequalities for. Hermitian Operators
 Internatonal Mathematcal Forum, Vol 3, 08, no, 507-57 HIKARI Ltd, wwwm-hkarcom https://doorg/0988/mf088055 The Order Relaton and Trace Inequaltes for Hermtan Operators Y Huang School of Informaton Scence
Internatonal Mathematcal Forum, Vol 3, 08, no, 507-57 HIKARI Ltd, wwwm-hkarcom https://doorg/0988/mf088055 The Order Relaton and Trace Inequaltes for Hermtan Operators Y Huang School of Informaton Scence
Note 2. Ling fong Li. 1 Klein Gordon Equation Probablity interpretation Solutions to Klein-Gordon Equation... 2
 Note 2 Lng fong L Contents Ken Gordon Equaton. Probabty nterpretaton......................................2 Soutons to Ken-Gordon Equaton............................... 2 2 Drac Equaton 3 2. Probabty nterpretaton.....................................
Note 2 Lng fong L Contents Ken Gordon Equaton. Probabty nterpretaton......................................2 Soutons to Ken-Gordon Equaton............................... 2 2 Drac Equaton 3 2. Probabty nterpretaton.....................................
Fall 2012 Analysis of Experimental Measurements B. Eisenstein/rev. S. Errede
 Fall 0 Analyss of Expermental easurements B. Esensten/rev. S. Errede We now reformulate the lnear Least Squares ethod n more general terms, sutable for (eventually extendng to the non-lnear case, and also
Fall 0 Analyss of Expermental easurements B. Esensten/rev. S. Errede We now reformulate the lnear Least Squares ethod n more general terms, sutable for (eventually extendng to the non-lnear case, and also
Lectures - Week 4 Matrix norms, Conditioning, Vector Spaces, Linear Independence, Spanning sets and Basis, Null space and Range of a Matrix
 Lectures - Week 4 Matrx norms, Condtonng, Vector Spaces, Lnear Independence, Spannng sets and Bass, Null space and Range of a Matrx Matrx Norms Now we turn to assocatng a number to each matrx. We could
Lectures - Week 4 Matrx norms, Condtonng, Vector Spaces, Lnear Independence, Spannng sets and Bass, Null space and Range of a Matrx Matrx Norms Now we turn to assocatng a number to each matrx. We could
Estimation: Part 2. Chapter GREG estimation
 Chapter 9 Estmaton: Part 2 9. GREG estmaton In Chapter 8, we have seen that the regresson estmator s an effcent estmator when there s a lnear relatonshp between y and x. In ths chapter, we generalzed the
Chapter 9 Estmaton: Part 2 9. GREG estmaton In Chapter 8, we have seen that the regresson estmator s an effcent estmator when there s a lnear relatonshp between y and x. In ths chapter, we generalzed the
Neural network-based athletics performance prediction optimization model applied research
 Avaabe onne www.jocpr.com Journa of Chemca and Pharmaceutca Research, 04, 6(6):8-5 Research Artce ISSN : 0975-784 CODEN(USA) : JCPRC5 Neura networ-based athetcs performance predcton optmzaton mode apped
Avaabe onne www.jocpr.com Journa of Chemca and Pharmaceutca Research, 04, 6(6):8-5 Research Artce ISSN : 0975-784 CODEN(USA) : JCPRC5 Neura networ-based athetcs performance predcton optmzaton mode apped
G : Statistical Mechanics
 G25.2651: Statstca Mechancs Notes for Lecture 11 I. PRINCIPLES OF QUANTUM STATISTICAL MECHANICS The probem of quantum statstca mechancs s the quantum mechanca treatment of an N-partce system. Suppose the
G25.2651: Statstca Mechancs Notes for Lecture 11 I. PRINCIPLES OF QUANTUM STATISTICAL MECHANICS The probem of quantum statstca mechancs s the quantum mechanca treatment of an N-partce system. Suppose the
Inner Product. Euclidean Space. Orthonormal Basis. Orthogonal
 Inner Product Defnton 1 () A Eucldean space s a fnte-dmensonal vector space over the reals R, wth an nner product,. Defnton 2 (Inner Product) An nner product, on a real vector space X s a symmetrc, blnear,
Inner Product Defnton 1 () A Eucldean space s a fnte-dmensonal vector space over the reals R, wth an nner product,. Defnton 2 (Inner Product) An nner product, on a real vector space X s a symmetrc, blnear,
LINEAR REGRESSION ANALYSIS. MODULE IX Lecture Multicollinearity
 LINEAR REGRESSION ANALYSIS MODULE IX Lecture - 30 Multcollnearty Dr. Shalabh Department of Mathematcs and Statstcs Indan Insttute of Technology Kanpur 2 Remedes for multcollnearty Varous technques have
LINEAR REGRESSION ANALYSIS MODULE IX Lecture - 30 Multcollnearty Dr. Shalabh Department of Mathematcs and Statstcs Indan Insttute of Technology Kanpur 2 Remedes for multcollnearty Varous technques have
Lecture 12: Discrete Laplacian
 Lecture 12: Dscrete Laplacan Scrbe: Tanye Lu Our goal s to come up wth a dscrete verson of Laplacan operator for trangulated surfaces, so that we can use t n practce to solve related problems We are mostly
Lecture 12: Dscrete Laplacan Scrbe: Tanye Lu Our goal s to come up wth a dscrete verson of Laplacan operator for trangulated surfaces, so that we can use t n practce to solve related problems We are mostly
LINEAR REGRESSION ANALYSIS. MODULE IX Lecture Multicollinearity
 LINEAR REGRESSION ANALYSIS MODULE IX Lecture - 31 Multcollnearty Dr. Shalabh Department of Mathematcs and Statstcs Indan Insttute of Technology Kanpur 6. Rdge regresson The OLSE s the best lnear unbased
LINEAR REGRESSION ANALYSIS MODULE IX Lecture - 31 Multcollnearty Dr. Shalabh Department of Mathematcs and Statstcs Indan Insttute of Technology Kanpur 6. Rdge regresson The OLSE s the best lnear unbased
On the Power Function of the Likelihood Ratio Test for MANOVA
 Journa of Mutvarate Anayss 8, 416 41 (00) do:10.1006/jmva.001.036 On the Power Functon of the Lkehood Rato Test for MANOVA Dua Kumar Bhaumk Unversty of South Aabama and Unversty of Inos at Chcago and Sanat
Journa of Mutvarate Anayss 8, 416 41 (00) do:10.1006/jmva.001.036 On the Power Functon of the Lkehood Rato Test for MANOVA Dua Kumar Bhaumk Unversty of South Aabama and Unversty of Inos at Chcago and Sanat
Chapter 6. Rotations and Tensors
 Vector Spaces n Physcs 8/6/5 Chapter 6. Rotatons and ensors here s a speca knd of near transformaton whch s used to transforms coordnates from one set of axes to another set of axes (wth the same orgn).
Vector Spaces n Physcs 8/6/5 Chapter 6. Rotatons and ensors here s a speca knd of near transformaton whch s used to transforms coordnates from one set of axes to another set of axes (wth the same orgn).
Estimating the Fundamental Matrix by Transforming Image Points in Projective Space 1
 Estmatng the Fundamental Matrx by Transformng Image Ponts n Projectve Space 1 Zhengyou Zhang and Charles Loop Mcrosoft Research, One Mcrosoft Way, Redmond, WA 98052, USA E-mal: fzhang,cloopg@mcrosoft.com
Estmatng the Fundamental Matrx by Transformng Image Ponts n Projectve Space 1 Zhengyou Zhang and Charles Loop Mcrosoft Research, One Mcrosoft Way, Redmond, WA 98052, USA E-mal: fzhang,cloopg@mcrosoft.com
Asymptotics of the Solution of a Boundary Value. Problem for One-Characteristic Differential. Equation Degenerating into a Parabolic Equation
 Nonl. Analyss and Dfferental Equatons, ol., 4, no., 5 - HIKARI Ltd, www.m-har.com http://dx.do.org/.988/nade.4.456 Asymptotcs of the Soluton of a Boundary alue Problem for One-Characterstc Dfferental Equaton
Nonl. Analyss and Dfferental Equatons, ol., 4, no., 5 - HIKARI Ltd, www.m-har.com http://dx.do.org/.988/nade.4.456 Asymptotcs of the Soluton of a Boundary alue Problem for One-Characterstc Dfferental Equaton
CSci 6974 and ECSE 6966 Math. Tech. for Vision, Graphics and Robotics Lecture 21, April 17, 2006 Estimating A Plane Homography
 CSc 6974 and ECSE 6966 Math. Tech. for Vson, Graphcs and Robotcs Lecture 21, Aprl 17, 2006 Estmatng A Plane Homography Overvew We contnue wth a dscusson of the major ssues, usng estmaton of plane projectve
CSc 6974 and ECSE 6966 Math. Tech. for Vson, Graphcs and Robotcs Lecture 21, Aprl 17, 2006 Estmatng A Plane Homography Overvew We contnue wth a dscusson of the major ssues, usng estmaton of plane projectve
Generalized Linear Methods
 Generalzed Lnear Methods 1 Introducton In the Ensemble Methods the general dea s that usng a combnaton of several weak learner one could make a better learner. More formally, assume that we have a set
Generalzed Lnear Methods 1 Introducton In the Ensemble Methods the general dea s that usng a combnaton of several weak learner one could make a better learner. More formally, assume that we have a set
= = = (a) Use the MATLAB command rref to solve the system. (b) Let A be the coefficient matrix and B be the right-hand side of the system.
 Use the MATLAB command rref to solve the system. (b) Let A be the coefficient matrix and B be the right-hand side of the system.") Chapter Matlab Exercses Chapter Matlab Exercses. Consder the lnear system of Example n Secton.. x x x y z y y z (a) Use the MATLAB command rref to solve the system. (b) Let A be the coeffcent matrx and
Chapter Matlab Exercses Chapter Matlab Exercses. Consder the lnear system of Example n Secton.. x x x y z y y z (a) Use the MATLAB command rref to solve the system. (b) Let A be the coeffcent matrx and
CIS526: Machine Learning Lecture 3 (Sept 16, 2003) Linear Regression. Preparation help: Xiaoying Huang. x 1 θ 1 output... θ M x M
 Linear Regression. Preparation help: Xiaoying Huang. x 1 θ 1 output... θ M x M") CIS56: achne Learnng Lecture 3 (Sept 6, 003) Preparaton help: Xaoyng Huang Lnear Regresson Lnear regresson can be represented by a functonal form: f(; θ) = θ 0 0 +θ + + θ = θ = 0 ote: 0 s a dummy attrbute
CIS56: achne Learnng Lecture 3 (Sept 6, 003) Preparaton help: Xaoyng Huang Lnear Regresson Lnear regresson can be represented by a functonal form: f(; θ) = θ 0 0 +θ + + θ = θ = 0 ote: 0 s a dummy attrbute
3.1 Expectation of Functions of Several Random Variables. )' be a k-dimensional discrete or continuous random vector, with joint PMF p (, E X E X1 E X
' be a k-dimensional discrete or continuous random vector, with joint PMF p (, E X E X1 E X") Statstcs 1: Probablty Theory II 37 3 EPECTATION OF SEVERAL RANDOM VARIABLES As n Probablty Theory I, the nterest n most stuatons les not on the actual dstrbuton of a random vector, but rather on a number
Statstcs 1: Probablty Theory II 37 3 EPECTATION OF SEVERAL RANDOM VARIABLES As n Probablty Theory I, the nterest n most stuatons les not on the actual dstrbuton of a random vector, but rather on a number
Deriving the Dual. Prof. Bennett Math of Data Science 1/13/06
 Dervng the Dua Prof. Bennett Math of Data Scence /3/06 Outne Ntty Grtty for SVM Revew Rdge Regresson LS-SVM=KRR Dua Dervaton Bas Issue Summary Ntty Grtty Need Dua of w, b, z w 2 2 mn st. ( x w ) = C z
Dervng the Dua Prof. Bennett Math of Data Scence /3/06 Outne Ntty Grtty for SVM Revew Rdge Regresson LS-SVM=KRR Dua Dervaton Bas Issue Summary Ntty Grtty Need Dua of w, b, z w 2 2 mn st. ( x w ) = C z
Composite Hypotheses testing
 Composte ypotheses testng In many hypothess testng problems there are many possble dstrbutons that can occur under each of the hypotheses. The output of the source s a set of parameters (ponts n a parameter
Composte ypotheses testng In many hypothess testng problems there are many possble dstrbutons that can occur under each of the hypotheses. The output of the source s a set of parameters (ponts n a parameter
APPENDIX A Some Linear Algebra
 APPENDIX A Some Lnear Algebra The collecton of m, n matrces A.1 Matrces a 1,1,..., a 1,n A = a m,1,..., a m,n wth real elements a,j s denoted by R m,n. If n = 1 then A s called a column vector. Smlarly,
APPENDIX A Some Lnear Algebra The collecton of m, n matrces A.1 Matrces a 1,1,..., a 1,n A = a m,1,..., a m,n wth real elements a,j s denoted by R m,n. If n = 1 then A s called a column vector. Smlarly,
ANSWERS. Problem 1. and the moment generating function (mgf) by. defined for any real t. Use this to show that E( U) var( U)
 by. defined for any real t. Use this to show that E( U) var( U)") Econ 413 Exam 13 H ANSWERS Settet er nndelt 9 deloppgaver, A,B,C, som alle anbefales å telle lkt for å gøre det ltt lettere å stå. Svar er gtt . Unfortunately, there s a prntng error n the hnt of
Econ 413 Exam 13 H ANSWERS Settet er nndelt 9 deloppgaver, A,B,C, som alle anbefales å telle lkt for å gøre det ltt lettere å stå. Svar er gtt . Unfortunately, there s a prntng error n the hnt of
However, since P is a symmetric idempotent matrix, of P are either 0 or 1 [Eigen-values
 Fall 007 Soluton to Mdterm Examnaton STAT 7 Dr. Goel. [0 ponts] For the general lnear model = X + ε, wth uncorrelated errors havng mean zero and varance σ, suppose that the desgn matrx X s not necessarly
Fall 007 Soluton to Mdterm Examnaton STAT 7 Dr. Goel. [0 ponts] For the general lnear model = X + ε, wth uncorrelated errors havng mean zero and varance σ, suppose that the desgn matrx X s not necessarly
Salmon: Lectures on partial differential equations. Consider the general linear, second-order PDE in the form. ,x 2
 Salmon: Lectures on partal dfferental equatons 5. Classfcaton of second-order equatons There are general methods for classfyng hgher-order partal dfferental equatons. One s very general (applyng even to
Salmon: Lectures on partal dfferental equatons 5. Classfcaton of second-order equatons There are general methods for classfyng hgher-order partal dfferental equatons. One s very general (applyng even to
Lecture 10: Dimensionality reduction
 Lecture : Dmensonalt reducton g The curse of dmensonalt g Feature etracton s. feature selecton g Prncpal Components Analss g Lnear Dscrmnant Analss Intellgent Sensor Sstems Rcardo Guterrez-Osuna Wrght
Lecture : Dmensonalt reducton g The curse of dmensonalt g Feature etracton s. feature selecton g Prncpal Components Analss g Lnear Dscrmnant Analss Intellgent Sensor Sstems Rcardo Guterrez-Osuna Wrght
Example: Suppose we want to build a classifier that recognizes WebPages of graduate students.
 Exampe: Suppose we want to bud a cassfer that recognzes WebPages of graduate students. How can we fnd tranng data? We can browse the web and coect a sampe of WebPages of graduate students of varous unverstes.
Exampe: Suppose we want to bud a cassfer that recognzes WebPages of graduate students. How can we fnd tranng data? We can browse the web and coect a sampe of WebPages of graduate students of varous unverstes.
LOW BIAS INTEGRATED PATH ESTIMATORS. James M. Calvin
 Proceedngs of the 007 Wnter Smulaton Conference S G Henderson, B Bller, M-H Hseh, J Shortle, J D Tew, and R R Barton, eds LOW BIAS INTEGRATED PATH ESTIMATORS James M Calvn Department of Computer Scence
Proceedngs of the 007 Wnter Smulaton Conference S G Henderson, B Bller, M-H Hseh, J Shortle, J D Tew, and R R Barton, eds LOW BIAS INTEGRATED PATH ESTIMATORS James M Calvn Department of Computer Scence
Optimal Guaranteed Cost Control of Linear Uncertain Systems with Input Constraints
 Internatona Journa Optma of Contro, Guaranteed Automaton, Cost Contro and Systems, of Lnear vo Uncertan 3, no Systems 3, pp 397-4, wth Input September Constrants 5 397 Optma Guaranteed Cost Contro of Lnear
Internatona Journa Optma of Contro, Guaranteed Automaton, Cost Contro and Systems, of Lnear vo Uncertan 3, no Systems 3, pp 397-4, wth Input September Constrants 5 397 Optma Guaranteed Cost Contro of Lnear
Chapter 7 Generalized and Weighted Least Squares Estimation. In this method, the deviation between the observed and expected values of
 Chapter 7 Generalzed and Weghted Least Squares Estmaton The usual lnear regresson model assumes that all the random error components are dentcally and ndependently dstrbuted wth constant varance. When
Chapter 7 Generalzed and Weghted Least Squares Estmaton The usual lnear regresson model assumes that all the random error components are dentcally and ndependently dstrbuted wth constant varance. When
Linear Approximation with Regularization and Moving Least Squares
 Lnear Approxmaton wth Regularzaton and Movng Least Squares Igor Grešovn May 007 Revson 4.6 (Revson : March 004). 5 4 3 0.5 3 3.5 4 Contents: Lnear Fttng...4. Weghted Least Squares n Functon Approxmaton...
Lnear Approxmaton wth Regularzaton and Movng Least Squares Igor Grešovn May 007 Revson 4.6 (Revson : March 004). 5 4 3 0.5 3 3.5 4 Contents: Lnear Fttng...4. Weghted Least Squares n Functon Approxmaton...
Lecture 3: Probability Distributions
 Lecture 3: Probablty Dstrbutons Random Varables Let us begn by defnng a sample space as a set of outcomes from an experment. We denote ths by S. A random varable s a functon whch maps outcomes nto the
Lecture 3: Probablty Dstrbutons Random Varables Let us begn by defnng a sample space as a set of outcomes from an experment. We denote ths by S. A random varable s a functon whch maps outcomes nto the
Some Comments on Accelerating Convergence of Iterative Sequences Using Direct Inversion of the Iterative Subspace (DIIS)
") Some Comments on Acceleratng Convergence of Iteratve Sequences Usng Drect Inverson of the Iteratve Subspace (DIIS) C. Davd Sherrll School of Chemstry and Bochemstry Georga Insttute of Technology May 1998
Some Comments on Acceleratng Convergence of Iteratve Sequences Usng Drect Inverson of the Iteratve Subspace (DIIS) C. Davd Sherrll School of Chemstry and Bochemstry Georga Insttute of Technology May 1998
ECONOMICS 351*-A Mid-Term Exam -- Fall Term 2000 Page 1 of 13 pages. QUEEN'S UNIVERSITY AT KINGSTON Department of Economics
 ECOOMICS 35*-A Md-Term Exam -- Fall Term 000 Page of 3 pages QUEE'S UIVERSITY AT KIGSTO Department of Economcs ECOOMICS 35* - Secton A Introductory Econometrcs Fall Term 000 MID-TERM EAM ASWERS MG Abbott
ECOOMICS 35*-A Md-Term Exam -- Fall Term 000 Page of 3 pages QUEE'S UIVERSITY AT KIGSTO Department of Economcs ECOOMICS 35* - Secton A Introductory Econometrcs Fall Term 000 MID-TERM EAM ASWERS MG Abbott
STAT 309: MATHEMATICAL COMPUTATIONS I FALL 2018 LECTURE 16
 STAT 39: MATHEMATICAL COMPUTATIONS I FALL 218 LECTURE 16 1 why teratve methods f we have a lnear system Ax = b where A s very, very large but s ether sparse or structured (eg, banded, Toepltz, banded plus
STAT 39: MATHEMATICAL COMPUTATIONS I FALL 218 LECTURE 16 1 why teratve methods f we have a lnear system Ax = b where A s very, very large but s ether sparse or structured (eg, banded, Toepltz, banded plus
Explaining the Stein Paradox
 Explanng the Sten Paradox Kwong Hu Yung 1999/06/10 Abstract Ths report offers several ratonale for the Sten paradox. Sectons 1 and defnes the multvarate normal mean estmaton problem and ntroduces Sten
Explanng the Sten Paradox Kwong Hu Yung 1999/06/10 Abstract Ths report offers several ratonale for the Sten paradox. Sectons 1 and defnes the multvarate normal mean estmaton problem and ntroduces Sten
Comparison of Regression Lines
 STATGRAPHICS Rev. 9/13/2013 Comparson of Regresson Lnes Summary... 1 Data Input... 3 Analyss Summary... 4 Plot of Ftted Model... 6 Condtonal Sums of Squares... 6 Analyss Optons... 7 Forecasts... 8 Confdence
STATGRAPHICS Rev. 9/13/2013 Comparson of Regresson Lnes Summary... 1 Data Input... 3 Analyss Summary... 4 Plot of Ftted Model... 6 Condtonal Sums of Squares... 6 Analyss Optons... 7 Forecasts... 8 Confdence
Econ107 Applied Econometrics Topic 3: Classical Model (Studenmund, Chapter 4)
") I. Classcal Assumptons Econ7 Appled Econometrcs Topc 3: Classcal Model (Studenmund, Chapter 4) We have defned OLS and studed some algebrac propertes of OLS. In ths topc we wll study statstcal propertes
I. Classcal Assumptons Econ7 Appled Econometrcs Topc 3: Classcal Model (Studenmund, Chapter 4) We have defned OLS and studed some algebrac propertes of OLS. In ths topc we wll study statstcal propertes
Lecture 6: Introduction to Linear Regression
 Lecture 6: Introducton to Lnear Regresson An Manchakul amancha@jhsph.edu 24 Aprl 27 Lnear regresson: man dea Lnear regresson can be used to study an outcome as a lnear functon of a predctor Example: 6
Lecture 6: Introducton to Lnear Regresson An Manchakul amancha@jhsph.edu 24 Aprl 27 Lnear regresson: man dea Lnear regresson can be used to study an outcome as a lnear functon of a predctor Example: 6
Number of cases Number of factors Number of covariates Number of levels of factor i. Value of the dependent variable for case k
 ANOVA Model and Matrx Computatons Notaton The followng notaton s used throughout ths chapter unless otherwse stated: N F CN Y Z j w W Number of cases Number of factors Number of covarates Number of levels
ANOVA Model and Matrx Computatons Notaton The followng notaton s used throughout ths chapter unless otherwse stated: N F CN Y Z j w W Number of cases Number of factors Number of covarates Number of levels
Singular Value Decomposition: Theory and Applications
 Sngular Value Decomposton: Theory and Applcatons Danel Khashab Sprng 2015 Last Update: March 2, 2015 1 Introducton A = UDV where columns of U and V are orthonormal and matrx D s dagonal wth postve real
Sngular Value Decomposton: Theory and Applcatons Danel Khashab Sprng 2015 Last Update: March 2, 2015 1 Introducton A = UDV where columns of U and V are orthonormal and matrx D s dagonal wth postve real
Time-Varying Systems and Computations Lecture 6
 Tme-Varyng Systems and Computatons Lecture 6 Klaus Depold 14. Januar 2014 The Kalman Flter The Kalman estmaton flter attempts to estmate the actual state of an unknown dscrete dynamcal system, gven nosy
Tme-Varyng Systems and Computatons Lecture 6 Klaus Depold 14. Januar 2014 The Kalman Flter The Kalman estmaton flter attempts to estmate the actual state of an unknown dscrete dynamcal system, gven nosy
Uncertainty as the Overlap of Alternate Conditional Distributions
 Uncertanty as the Overlap of Alternate Condtonal Dstrbutons Olena Babak and Clayton V. Deutsch Centre for Computatonal Geostatstcs Department of Cvl & Envronmental Engneerng Unversty of Alberta An mportant
Uncertanty as the Overlap of Alternate Condtonal Dstrbutons Olena Babak and Clayton V. Deutsch Centre for Computatonal Geostatstcs Department of Cvl & Envronmental Engneerng Unversty of Alberta An mportant
n α j x j = 0 j=1 has a nontrivial solution. Here A is the n k matrix whose jth column is the vector for all t j=0
 MODULE 2 Topcs: Lnear ndependence, bass and dmenson We have seen that f n a set of vectors one vector s a lnear combnaton of the remanng vectors n the set then the span of the set s unchanged f that vector
MODULE 2 Topcs: Lnear ndependence, bass and dmenson We have seen that f n a set of vectors one vector s a lnear combnaton of the remanng vectors n the set then the span of the set s unchanged f that vector
Lecture Notes on Linear Regression
 Lecture Notes on Lnear Regresson Feng L fl@sdueducn Shandong Unversty, Chna Lnear Regresson Problem In regresson problem, we am at predct a contnuous target value gven an nput feature vector We assume
Lecture Notes on Lnear Regresson Feng L fl@sdueducn Shandong Unversty, Chna Lnear Regresson Problem In regresson problem, we am at predct a contnuous target value gven an nput feature vector We assume
Radar Trackers. Study Guide. All chapters, problems, examples and page numbers refer to Applied Optimal Estimation, A. Gelb, Ed.
 Radar rackers Study Gude All chapters, problems, examples and page numbers refer to Appled Optmal Estmaton, A. Gelb, Ed. Chapter Example.0- Problem Statement wo sensors Each has a sngle nose measurement
Radar rackers Study Gude All chapters, problems, examples and page numbers refer to Appled Optmal Estmaton, A. Gelb, Ed. Chapter Example.0- Problem Statement wo sensors Each has a sngle nose measurement
Robert Eisberg Second edition CH 09 Multielectron atoms ground states and x-ray excitations
 Quantum Physcs 量 理 Robert Esberg Second edton CH 09 Multelectron atoms ground states and x-ray exctatons 9-01 By gong through the procedure ndcated n the text, develop the tme-ndependent Schroednger equaton
Quantum Physcs 量 理 Robert Esberg Second edton CH 09 Multelectron atoms ground states and x-ray exctatons 9-01 By gong through the procedure ndcated n the text, develop the tme-ndependent Schroednger equaton
Feb 14: Spatial analysis of data fields
 Feb 4: Spatal analyss of data felds Mappng rregularly sampled data onto a regular grd Many analyss technques for geophyscal data requre the data be located at regular ntervals n space and/or tme. hs s
Feb 4: Spatal analyss of data felds Mappng rregularly sampled data onto a regular grd Many analyss technques for geophyscal data requre the data be located at regular ntervals n space and/or tme. hs s
C/CS/Phy191 Problem Set 3 Solutions Out: Oct 1, 2008., where ( 00. ), so the overall state of the system is ) ( ( ( ( 00 ± 11 ), Φ ± = 1
, so the overall state of the system is ) ( ( ( ( 00 ± 11 ), Φ ± = 1") C/CS/Phy9 Problem Set 3 Solutons Out: Oct, 8 Suppose you have two qubts n some arbtrary entangled state ψ You apply the teleportaton protocol to each of the qubts separately What s the resultng state obtaned
C/CS/Phy9 Problem Set 3 Solutons Out: Oct, 8 Suppose you have two qubts n some arbtrary entangled state ψ You apply the teleportaton protocol to each of the qubts separately What s the resultng state obtaned
Lecture 4: Universal Hash Functions/Streaming Cont d
 CSE 5: Desgn and Analyss of Algorthms I Sprng 06 Lecture 4: Unversal Hash Functons/Streamng Cont d Lecturer: Shayan Oves Gharan Aprl 6th Scrbe: Jacob Schreber Dsclamer: These notes have not been subjected
CSE 5: Desgn and Analyss of Algorthms I Sprng 06 Lecture 4: Unversal Hash Functons/Streamng Cont d Lecturer: Shayan Oves Gharan Aprl 6th Scrbe: Jacob Schreber Dsclamer: These notes have not been subjected
A New Refinement of Jacobi Method for Solution of Linear System Equations AX=b
 Int J Contemp Math Scences, Vol 3, 28, no 17, 819-827 A New Refnement of Jacob Method for Soluton of Lnear System Equatons AX=b F Naem Dafchah Department of Mathematcs, Faculty of Scences Unversty of Gulan,
Int J Contemp Math Scences, Vol 3, 28, no 17, 819-827 A New Refnement of Jacob Method for Soluton of Lnear System Equatons AX=b F Naem Dafchah Department of Mathematcs, Faculty of Scences Unversty of Gulan,
APPROXIMATE PRICES OF BASKET AND ASIAN OPTIONS DUPONT OLIVIER. Premia 14
 APPROXIMAE PRICES OF BASKE AND ASIAN OPIONS DUPON OLIVIER Prema 14 Contents Introducton 1 1. Framewor 1 1.1. Baset optons 1.. Asan optons. Computng the prce 3. Lower bound 3.1. Closed formula for the prce
APPROXIMAE PRICES OF BASKE AND ASIAN OPIONS DUPON OLIVIER Prema 14 Contents Introducton 1 1. Framewor 1 1.1. Baset optons 1.. Asan optons. Computng the prce 3. Lower bound 3.1. Closed formula for the prce
1. Inference on Regression Parameters a. Finding Mean, s.d and covariance amongst estimates. 2. Confidence Intervals and Working Hotelling Bands
 Content. Inference on Regresson Parameters a. Fndng Mean, s.d and covarance amongst estmates.. Confdence Intervals and Workng Hotellng Bands 3. Cochran s Theorem 4. General Lnear Testng 5. Measures of
Content. Inference on Regresson Parameters a. Fndng Mean, s.d and covarance amongst estmates.. Confdence Intervals and Workng Hotellng Bands 3. Cochran s Theorem 4. General Lnear Testng 5. Measures of
MMA and GCMMA two methods for nonlinear optimization
 MMA and GCMMA two methods for nonlnear optmzaton Krster Svanberg Optmzaton and Systems Theory, KTH, Stockholm, Sweden. krlle@math.kth.se Ths note descrbes the algorthms used n the author s 2007 mplementatons
MMA and GCMMA two methods for nonlnear optmzaton Krster Svanberg Optmzaton and Systems Theory, KTH, Stockholm, Sweden. krlle@math.kth.se Ths note descrbes the algorthms used n the author s 2007 mplementatons
Asynchronous Data Fusion With Parallel Filtering Frame
 I.J. Informaton echnoogy and Computer cence -9 ubshed Onne June n C http://.mecs-press.org/ Asynchronous Data Fuson Wth arae Fterng Frame a Department of Informaton ngneerng Zhenghou Coege of Anma usbandry
I.J. Informaton echnoogy and Computer cence -9 ubshed Onne June n C http://.mecs-press.org/ Asynchronous Data Fuson Wth arae Fterng Frame a Department of Informaton ngneerng Zhenghou Coege of Anma usbandry
Numerical Heat and Mass Transfer
 Master degree n Mechancal Engneerng Numercal Heat and Mass Transfer 06-Fnte-Dfference Method (One-dmensonal, steady state heat conducton) Fausto Arpno f.arpno@uncas.t Introducton Why we use models and
Master degree n Mechancal Engneerng Numercal Heat and Mass Transfer 06-Fnte-Dfference Method (One-dmensonal, steady state heat conducton) Fausto Arpno f.arpno@uncas.t Introducton Why we use models and
Random Walks on Digraphs
 Random Walks on Dgraphs J. J. P. Veerman October 23, 27 Introducton Let V = {, n} be a vertex set and S a non-negatve row-stochastc matrx (.e. rows sum to ). V and S defne a dgraph G = G(V, S) and a drected
Random Walks on Dgraphs J. J. P. Veerman October 23, 27 Introducton Let V = {, n} be a vertex set and S a non-negatve row-stochastc matrx (.e. rows sum to ). V and S defne a dgraph G = G(V, S) and a drected
The Multiple Classical Linear Regression Model (CLRM): Specification and Assumptions. 1. Introduction
: Specification and Assumptions. 1. Introduction") ECONOMICS 5* -- NOTE (Summary) ECON 5* -- NOTE The Multple Classcal Lnear Regresson Model (CLRM): Specfcaton and Assumptons. Introducton CLRM stands for the Classcal Lnear Regresson Model. The CLRM s also
ECONOMICS 5* -- NOTE (Summary) ECON 5* -- NOTE The Multple Classcal Lnear Regresson Model (CLRM): Specfcaton and Assumptons. Introducton CLRM stands for the Classcal Lnear Regresson Model. The CLRM s also
Systems of Equations (SUR, GMM, and 3SLS)
") Lecture otes on Advanced Econometrcs Takash Yamano Fall Semester 4 Lecture 4: Sstems of Equatons (SUR, MM, and 3SLS) Seemngl Unrelated Regresson (SUR) Model Consder a set of lnear equatons: $ + ɛ $ + ɛ
Lecture otes on Advanced Econometrcs Takash Yamano Fall Semester 4 Lecture 4: Sstems of Equatons (SUR, MM, and 3SLS) Seemngl Unrelated Regresson (SUR) Model Consder a set of lnear equatons: $ + ɛ $ + ɛ
Week3, Chapter 4. Position and Displacement. Motion in Two Dimensions. Instantaneous Velocity. Average Velocity
 Week3, Chapter 4 Moton n Two Dmensons Lecture Quz A partcle confned to moton along the x axs moves wth constant acceleraton from x =.0 m to x = 8.0 m durng a 1-s tme nterval. The velocty of the partcle
Week3, Chapter 4 Moton n Two Dmensons Lecture Quz A partcle confned to moton along the x axs moves wth constant acceleraton from x =.0 m to x = 8.0 m durng a 1-s tme nterval. The velocty of the partcle
Lecture 3. Ax x i a i. i i
 18.409 The Behavor of Algorthms n Practce 2/14/2 Lecturer: Dan Spelman Lecture 3 Scrbe: Arvnd Sankar 1 Largest sngular value In order to bound the condton number, we need an upper bound on the largest
18.409 The Behavor of Algorthms n Practce 2/14/2 Lecturer: Dan Spelman Lecture 3 Scrbe: Arvnd Sankar 1 Largest sngular value In order to bound the condton number, we need an upper bound on the largest
Negative Binomial Regression
 STATGRAPHICS Rev. 9/16/2013 Negatve Bnomal Regresson Summary... 1 Data Input... 3 Statstcal Model... 3 Analyss Summary... 4 Analyss Optons... 7 Plot of Ftted Model... 8 Observed Versus Predcted... 10 Predctons...
STATGRAPHICS Rev. 9/16/2013 Negatve Bnomal Regresson Summary... 1 Data Input... 3 Statstcal Model... 3 Analyss Summary... 4 Analyss Optons... 7 Plot of Ftted Model... 8 Observed Versus Predcted... 10 Predctons...
Appendix for An Efficient Ascending-Bid Auction for Multiple Objects: Comment For Online Publication
 Appendx for An Effcent Ascendng-Bd Aucton for Mutpe Objects: Comment For Onne Pubcaton Norak Okamoto The foowng counterexampe shows that sncere bddng by a bdders s not aways an ex post perfect equbrum
Appendx for An Effcent Ascendng-Bd Aucton for Mutpe Objects: Comment For Onne Pubcaton Norak Okamoto The foowng counterexampe shows that sncere bddng by a bdders s not aways an ex post perfect equbrum
Comparison of the Population Variance Estimators. of 2-Parameter Exponential Distribution Based on. Multiple Criteria Decision Making Method
 Appled Mathematcal Scences, Vol. 7, 0, no. 47, 07-0 HIARI Ltd, www.m-hkar.com Comparson of the Populaton Varance Estmators of -Parameter Exponental Dstrbuton Based on Multple Crtera Decson Makng Method
Appled Mathematcal Scences, Vol. 7, 0, no. 47, 07-0 HIARI Ltd, www.m-hkar.com Comparson of the Populaton Varance Estmators of -Parameter Exponental Dstrbuton Based on Multple Crtera Decson Makng Method
The line method combined with spectral chebyshev for space-time fractional diffusion equation
 Apped and Computatona Mathematcs 014; 3(6): 330-336 Pubshed onne December 31, 014 (http://www.scencepubshnggroup.com/j/acm) do: 10.1164/j.acm.0140306.17 ISS: 3-5605 (Prnt); ISS: 3-5613 (Onne) The ne method
Apped and Computatona Mathematcs 014; 3(6): 330-336 Pubshed onne December 31, 014 (http://www.scencepubshnggroup.com/j/acm) do: 10.1164/j.acm.0140306.17 ISS: 3-5605 (Prnt); ISS: 3-5613 (Onne) The ne method
Interference Alignment and Degrees of Freedom Region of Cellular Sigma Channel
 2011 IEEE Internatona Symposum on Informaton Theory Proceedngs Interference Agnment and Degrees of Freedom Regon of Ceuar Sgma Channe Huaru Yn 1 Le Ke 2 Zhengdao Wang 2 1 WINLAB Dept of EEIS Unv. of Sc.
2011 IEEE Internatona Symposum on Informaton Theory Proceedngs Interference Agnment and Degrees of Freedom Regon of Ceuar Sgma Channe Huaru Yn 1 Le Ke 2 Zhengdao Wang 2 1 WINLAB Dept of EEIS Unv. of Sc.
4DVAR, according to the name, is a four-dimensional variational method.
 4D-Varatonal Data Assmlaton (4D-Var) 4DVAR, accordng to the name, s a four-dmensonal varatonal method. 4D-Var s actually a drect generalzaton of 3D-Var to handle observatons that are dstrbuted n tme. The
4D-Varatonal Data Assmlaton (4D-Var) 4DVAR, accordng to the name, s a four-dmensonal varatonal method. 4D-Var s actually a drect generalzaton of 3D-Var to handle observatons that are dstrbuted n tme. The
Global Sensitivity. Tuesday 20 th February, 2018
 Global Senstvty Tuesday 2 th February, 28 ) Local Senstvty Most senstvty analyses [] are based on local estmates of senstvty, typcally by expandng the response n a Taylor seres about some specfc values
Global Senstvty Tuesday 2 th February, 28 ) Local Senstvty Most senstvty analyses [] are based on local estmates of senstvty, typcally by expandng the response n a Taylor seres about some specfc values
More metrics on cartesian products
 More metrcs on cartesan products If (X, d ) are metrc spaces for 1 n, then n Secton II4 of the lecture notes we defned three metrcs on X whose underlyng topologes are the product topology The purpose of
More metrcs on cartesan products If (X, d ) are metrc spaces for 1 n, then n Secton II4 of the lecture notes we defned three metrcs on X whose underlyng topologes are the product topology The purpose of
Transfer Functions. Convenient representation of a linear, dynamic model. A transfer function (TF) relates one input and one output: ( ) system
 relates one input and one output: ( ) system") Transfer Functons Convenent representaton of a lnear, dynamc model. A transfer functon (TF) relates one nput and one output: x t X s y t system Y s The followng termnology s used: x y nput output forcng
Transfer Functons Convenent representaton of a lnear, dynamc model. A transfer functon (TF) relates one nput and one output: x t X s y t system Y s The followng termnology s used: x y nput output forcng
Networked Cooperative Distributed Model Predictive Control Based on State Observer
 Apped Mathematcs, 6, 7, 48-64 ubshed Onne June 6 n ScRes. http://www.scrp.org/journa/am http://dx.do.org/.436/am.6.73 Networed Cooperatve Dstrbuted Mode redctve Contro Based on State Observer Ba Su, Yanan
Apped Mathematcs, 6, 7, 48-64 ubshed Onne June 6 n ScRes. http://www.scrp.org/journa/am http://dx.do.org/.436/am.6.73 Networed Cooperatve Dstrbuted Mode redctve Contro Based on State Observer Ba Su, Yanan
Globally Optimal Multisensor Distributed Random Parameter Matrices Kalman Filtering Fusion with Applications
 Sensors 2008, 8, 8086-8103; DOI: 10.3390/s8128086 OPEN ACCESS sensors ISSN 1424-8220 www.mdp.com/journa/sensors Artce Gobay Optma Mutsensor Dstrbuted Random Parameter Matrces Kaman Fterng Fuson wth Appcatons
Sensors 2008, 8, 8086-8103; DOI: 10.3390/s8128086 OPEN ACCESS sensors ISSN 1424-8220 www.mdp.com/journa/sensors Artce Gobay Optma Mutsensor Dstrbuted Random Parameter Matrces Kaman Fterng Fuson wth Appcatons
Andre Schneider P622
 Andre Schneder P6 Probem Set #0 March, 00 Srednc 7. Suppose that we have a theory wth Negectng the hgher order terms, show that Souton Knowng β(α and γ m (α we can wrte β(α =b α O(α 3 (. γ m (α =c α O(α
Andre Schneder P6 Probem Set #0 March, 00 Srednc 7. Suppose that we have a theory wth Negectng the hgher order terms, show that Souton Knowng β(α and γ m (α we can wrte β(α =b α O(α 3 (. γ m (α =c α O(α
NON-CENTRAL 7-POINT FORMULA IN THE METHOD OF LINES FOR PARABOLIC AND BURGERS' EQUATIONS
 IJRRAS 8 (3 September 011 www.arpapress.com/volumes/vol8issue3/ijrras_8_3_08.pdf NON-CENTRAL 7-POINT FORMULA IN THE METHOD OF LINES FOR PARABOLIC AND BURGERS' EQUATIONS H.O. Bakodah Dept. of Mathematc
IJRRAS 8 (3 September 011 www.arpapress.com/volumes/vol8issue3/ijrras_8_3_08.pdf NON-CENTRAL 7-POINT FORMULA IN THE METHOD OF LINES FOR PARABOLIC AND BURGERS' EQUATIONS H.O. Bakodah Dept. of Mathematc
Monica Purcaru and Nicoleta Aldea. Abstract
 FILOMAT (Nš) 16 (22), 7 17 GENERAL CONFORMAL ALMOST SYMPLECTIC N-LINEAR CONNECTIONS IN THE BUNDLE OF ACCELERATIONS Monca Purcaru and Ncoeta Adea Abstract The am of ths paper 1 s to fnd the transformaton
FILOMAT (Nš) 16 (22), 7 17 GENERAL CONFORMAL ALMOST SYMPLECTIC N-LINEAR CONNECTIONS IN THE BUNDLE OF ACCELERATIONS Monca Purcaru and Ncoeta Adea Abstract The am of ths paper 1 s to fnd the transformaton
Notes on Frequency Estimation in Data Streams
 Notes on Frequency Estmaton n Data Streams In (one of) the data streamng model(s), the data s a sequence of arrvals a 1, a 2,..., a m of the form a j = (, v) where s the dentty of the tem and belongs to
Notes on Frequency Estmaton n Data Streams In (one of) the data streamng model(s), the data s a sequence of arrvals a 1, a 2,..., a m of the form a j = (, v) where s the dentty of the tem and belongs to
LOW-DENSITY Parity-Check (LDPC) codes have received
 codes have received") IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 59, NO. 7, JULY 2011 1807 Successve Maxmzaton for Systematc Desgn of Unversay Capacty Approachng Rate-Compatbe Sequences of LDPC Code Ensembes over Bnary-Input
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 59, NO. 7, JULY 2011 1807 Successve Maxmzaton for Systematc Desgn of Unversay Capacty Approachng Rate-Compatbe Sequences of LDPC Code Ensembes over Bnary-Input
Convexity preserving interpolation by splines of arbitrary degree
 Computer Scence Journal of Moldova, vol.18, no.1(52), 2010 Convexty preservng nterpolaton by splnes of arbtrary degree Igor Verlan Abstract In the present paper an algorthm of C 2 nterpolaton of dscrete
Computer Scence Journal of Moldova, vol.18, no.1(52), 2010 Convexty preservng nterpolaton by splnes of arbtrary degree Igor Verlan Abstract In the present paper an algorthm of C 2 nterpolaton of dscrete
The Impact of the Earth s Movement through the Space on Measuring the Velocity of Light
 Journal of Appled Matheatcs and Physcs, 6, 4, 68-78 Publshed Onlne June 6 n ScRes http://wwwscrporg/journal/jap http://dxdoorg/436/jap646 The Ipact of the Earth s Moeent through the Space on Measurng the
Journal of Appled Matheatcs and Physcs, 6, 4, 68-78 Publshed Onlne June 6 n ScRes http://wwwscrporg/journal/jap http://dxdoorg/436/jap646 The Ipact of the Earth s Moeent through the Space on Measurng the
Lower bounds for the Crossing Number of the Cartesian Product of a Vertex-transitive Graph with a Cycle
 Lower bounds for the Crossng Number of the Cartesan Product of a Vertex-transtve Graph wth a Cyce Junho Won MIT-PRIMES December 4, 013 Abstract. The mnmum number of crossngs for a drawngs of a gven graph
Lower bounds for the Crossng Number of the Cartesan Product of a Vertex-transtve Graph wth a Cyce Junho Won MIT-PRIMES December 4, 013 Abstract. The mnmum number of crossngs for a drawngs of a gven graph
2E Pattern Recognition Solutions to Introduction to Pattern Recognition, Chapter 2: Bayesian pattern classification
 E395 - Pattern Recognton Solutons to Introducton to Pattern Recognton, Chapter : Bayesan pattern classfcaton Preface Ths document s a soluton manual for selected exercses from Introducton to Pattern Recognton
E395 - Pattern Recognton Solutons to Introducton to Pattern Recognton, Chapter : Bayesan pattern classfcaton Preface Ths document s a soluton manual for selected exercses from Introducton to Pattern Recognton
EXPERIMENT AND THEORISATION: AN APPLICATION OF THE HYDROSTATIC EQUATION AND ARCHIMEDES THEOREM
 EXPERIMENT AND THEORISATION: AN APPLICATION OF THE HYDROSTATIC EQUATION AND ARCHIMEDES THEOREM Santos Lucía, Taaa Máro, Departamento de Físca, Unversdade de Avero, Avero, Portuga 1. Introducton Today s
EXPERIMENT AND THEORISATION: AN APPLICATION OF THE HYDROSTATIC EQUATION AND ARCHIMEDES THEOREM Santos Lucía, Taaa Máro, Departamento de Físca, Unversdade de Avero, Avero, Portuga 1. Introducton Today s
Analysis of Block OMP using Block RIP
 Anayss of ock OMP usng ock RIP Jun Wang, Gang L, Hao Zhang, Xqn Wang Department of Eectronc Engneerng, snghua Unversty, eng 00084, Chna Emas: un-wang05@mas.tsnghua.eu.cn, {gang, haozhang, wangq_ee}@tsnghua.eu.cn
Anayss of ock OMP usng ock RIP Jun Wang, Gang L, Hao Zhang, Xqn Wang Department of Eectronc Engneerng, snghua Unversty, eng 00084, Chna Emas: un-wang05@mas.tsnghua.eu.cn, {gang, haozhang, wangq_ee}@tsnghua.eu.cn
Multispectral Remote Sensing Image Classification Algorithm Based on Rough Set Theory
 Proceedngs of the 2009 IEEE Internatona Conference on Systems Man and Cybernetcs San Antono TX USA - October 2009 Mutspectra Remote Sensng Image Cassfcaton Agorthm Based on Rough Set Theory Yng Wang Xaoyun
Proceedngs of the 2009 IEEE Internatona Conference on Systems Man and Cybernetcs San Antono TX USA - October 2009 Mutspectra Remote Sensng Image Cassfcaton Agorthm Based on Rough Set Theory Yng Wang Xaoyun
8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS
 SECTION 8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS 493 8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS All the vector spaces you have studed thus far n the text are real vector spaces because the scalars
SECTION 8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS 493 8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS All the vector spaces you have studed thus far n the text are real vector spaces because the scalars