Predator-swarm interactions
|
|
|
- Bartholomew Watson
- 6 years ago
- Views:
Transcription
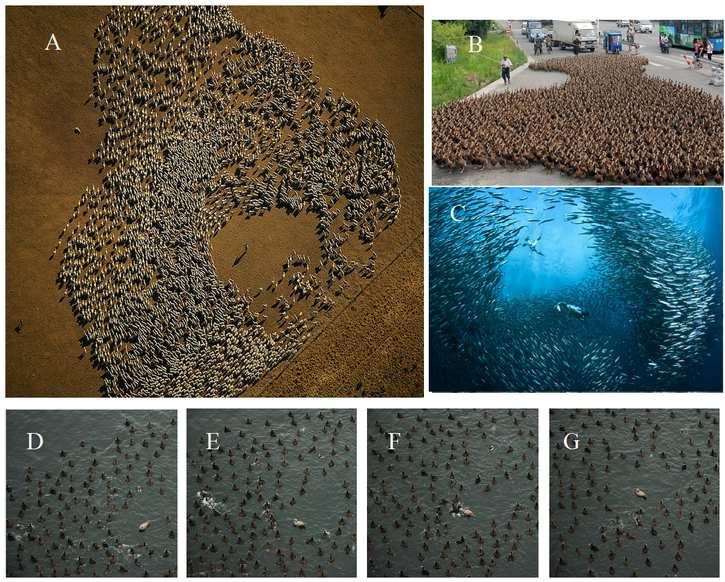
1 Predator-swarm interactions Hypothesis: swarming behaviour is an evolutionary adaptation that confers certain benefits on the individuals or group as a whole [Parrish,Edelstein-Keshet 1999; Sumpter 2010, Krause&Ruxton2002, Penzhorn 1984] Benifits: - efficient food gathering [Traniello1989] - heat preservation in penguins huddles [Waters,Blanchette&Kim 2012] - predator avoidance in fish shoals [Pitcher&Wyche 83] or zebra [Penzhorn84] evasive maneuvers, confusing the predator, safety in numbers increased vigilance Counter-hypothesis: swarming can also be detrimental to prey - Makes it easier for the predator to spot and attack the group as a whole [Parrish,Edelstein-Keshet 1999].
2
3 Minimal model of predator-swarm interaction [Chen, K, J. Royal Soc. Interface 2014]: dx j dt }{{} = 1 N Prey dz dt }{{} = c N Predator N k=1,k j N k=1 ( x j x k x j x k }{{} 2 prey-prey repulsion x k z x k z }{{} p predator-prey attraction a (x j x k ) }{{} prey-prey attraction ) + b x j z x j z }{{} 2 prey-predator repulsion (1). (2) We take prey-prey and prey-redator interactions to be Newtonian - makes the analysis possible! c : predator strength. We will use it as control parameter. p : predator sensitivity.
4
5 Continuum limit Coarse grain: Let N we get ρ (x) = 1 N N δ(x x j ) j=1 ρ t (x, t) + (ρ(x, t)v(x, t)) = 0 (3) ( ) x y v(x, t) = R x y 2 a (x y) ρ(y, t)dy + b x z x z 2 2 (4) dz dt = c y z y z pρ(y, t)dy. (5) R 2
6 The key to the story: x y x y 2 = x ln x y. ( ) ( ) x y x z v(x, t) = a (x y) ρ(y, t)dy + b R x y 2 }{{ 2 x z }}{{ 2 } x ln x y x ln x z x v = [2πδ(x y) 2a]ρ(y)dy + 2πbδ(x z) R 2 = 2πρ(x) 2aM Define characterisitic coordinates: dx dt = v(x, t); X(X 0, 0) = X 0. (6) Along characteristics, Conclusion 1: ρ am/π as t dρ dt = ρ t + ( xρ)v = ( x v) ρ (7) = (2aM 2πρ)ρ (8) - ρ const regardless of the swarm shape! Conclusion 2: Radial steady state is an annulus of constant density!
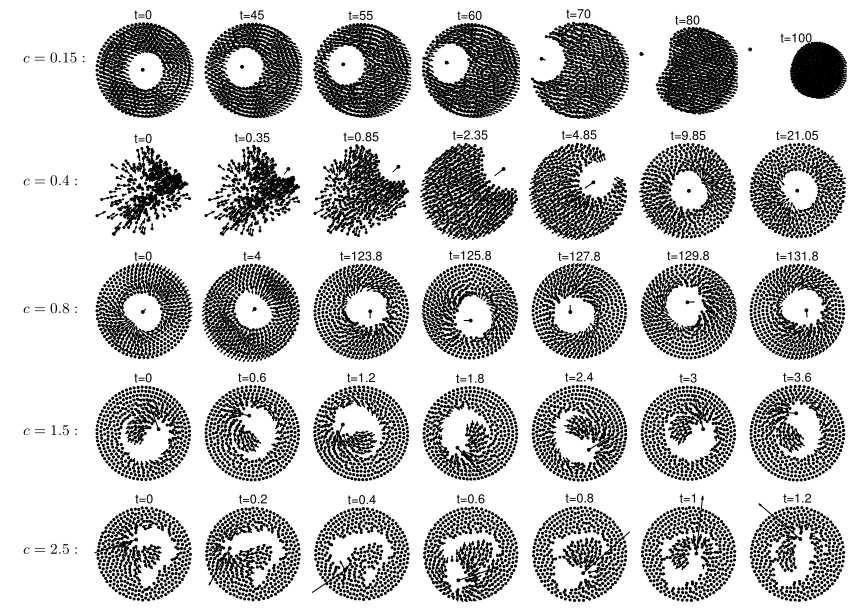
7 Ring state ( confused predator) 1 q=2, a=1.26, b= Define R 1 = b/a; R 2 = (1 + b)/a. (9) The system (3-5) admits a steady state for which z = 0, ρ is a positive constant inside an annulus R 1 < x < R 2, and is otherwise. Main result: The ring is stable whenever 2 < p < 4 and ba 2 p 2 (1 + b) 2 p 2 =: c 0 < c < c hopf := a 2 p 2 b 2 p 2 (1 + b) 2 p 2. (10) Increasing c past c hopf triggers hopf bifurcation!
8 Key calculation 2 The density quickly approaches a constant, so the swarm is fully characterised by the motion of its boundaries. To determine its stability, it s enough perturb the boundary and the predator at the center: Get a 3x3 eigenvalue problem where A = Inner boundary: x = R 1 e iθ + ε 1 e λt (11) Outer boundary: x = R 2 e iθ + ε 2 e λt (12) Predator: z = 0 + ε 3 e λt (13) ( ) R 2 2 R1 2 λ ε 1 ε 2 ε 3 = A ε 1 ε 2 ε 3 b 1 b 1 b b b 1+b b c ( ) 2 p b 2 a c ( ) 2 p [ 1+b 2 ( a c b ) 2 p a 1+b 2 ( 1+b a (14) ) 2 p 2 ].
9 Implications c hopf = a 2 p 2 b 2 p 2 (1 + b) 2 p 2, 2 < p < 4 (15) c hopf is an increasing function of b (prey-predator repulsion) - increasing b makes it harder for the predator to catch the prey. c hopf is a decreasing function of a (prey-prey attraction strength) - increasing a makes it easier for the predator to catch the prey. - Swarming behaviour makes it easier for predator to catch prey (i.e. swarming is bad for prey)! - Example: in [Fertl&Wursig95] the authors observed groups of about dolphins surrounding a school of fish and blowing bubbles underneath it in an apparent effort to keep the school from dispersing, while other members of the dolphin group swam through the resulting ball of fish to feed.

10 - Swarming may be result of other factors such as food gathering, ease of mating, energetic benifits, or even constraints of physical environment are responsible for prey aggregation. When c crosses c hopf, chasing dynamics result. But the prey may still escape! - Linear stability is a precursor to capturing the prey, but is insufficient to explain the capturing process itself! - Further (non-linear) analysis is needed to explain prey capture. - Chasing dynamics look similar to shephard chasing sheep:
11 Boundary evolution method Because of choice of nonlinearity, the density approaches a constant for large t So in principle, tracking the boundary is sufficient to track the whole swarm! Since density is constant: v(x, t) = a π D ( ) x y x y 2 a (x y) dy + b x z x z 2 (16) Integrate by parts, using constant density ρ = a/π, v(x) = a ( ) x y π D x y 2 a (x y) dy + b x z x z 2 = a ( ln x y + a π 2 x y 2) ˆndS(y) + b x z x z 2 D dz dt = ca π = ca π R 2 D y z y z pdy y z 2 p ˆndS(y). 2 p

12 Discretize D and evolve both predator and D according to the above. Note: the entire calculation is along the curve (so only 1D integrals!!) Use Forward Euler to update to points on the boundary. - This was found to be unstable, regardless of the choice of time step t. The is because the points along the boundary tend to cluster together as time evolves. This is a result of the points being pushed back along the boundary and aggregating at the tail. - Solution: reparameterize based on arc length at every time step.
13 Predator inside an infinite sea of prey Recall the steady state is an annulus of radii R 1 = predator at the center. b a R 2 = 1+b a with the Take the double-limit a 0 and b = O(1); then note that R 2 while R 1 remains O(1). Discarding the O(a 2 ) terms as well as the exterior boundary, we obtain v(x) = 1 π where D i is the interior boundary. D i a ln x y ˆndS(y) + b x z x z 2 (17) Rescale space to make a = b, rescale time t = aˆt and dropping the hat we get v(x) = 1 ln x y ˆndS(y) + x z π D i x z Couple this with some law of motion for the predator z : - Moving in a straight line - Moving in a circle 2. (18)
14 Predator moving in straight line Predator moving in straight line Assume predator moving east with a constant speed ω along the x-axis: z = ωt (19) Moving frame coordinates: x = x + ωt (20) Dropping tilde, we get v(x) = 1 π D i ln x y ˆndS(y) + x x 2 ω (21) The steady state satisfies v = 0 on D i. To compute the steady state, evolve in time until convegence.
15 Open question: what can we say about steady state analytically?
16 An infinite tail forms when ω > ω c Conjecture: it is a result of a saddle point colliding with the boundary.
17 The predator approaches the boundary as ω increases. (precursor to catching prey?) Open question 2: Do the asymptotics of large ω. Can you show the predator remains inside the boundary for any ω?
18 Predator moving in a circle Predator moving in a circle Assume the predator is moving with angular velocity ω along a circle of radius R : z = Re iωt Go into rotating frame, x = xe iωt, drop tilde: v(x) = 1 ln x y ˆndS(y) + π D i Predator moving in a line corresponds to the limit R. x R x R 2 iωx.
19
20 Increasing ω As ω is increased, the tail starts to wiggle.

21 Topological changes Formation of the tail and its development is indicated by changes in vector field.
22 Conclusions We presented an analytically tractable model of predator-prey interactions. Many open questions remain. The most important one: find shape of inner boundary for a predator moving in a straight line in the infinite sea of prey. Many models of collective animal behaviour found in literature include terms such as zone of alignment, angle of vision, acceleration etc. These terms may result in a more realistic-looking motion, although it can be difficult in practice to actually measure precisely how realistic it is. Moreover the added complexity makes it very difficult to study the model except through numerical simulations. Our minimal model shows that these additional effects are not necessary to reproduce complex predator-prey interactions.
23 Good open problem Take D Orsogna et.al. model with Newtonian repulsion, linear attraction force: x i = v i v i = ( α β v i 2) v i + j i ( ) 1 x i x j 2 γ (x i x j ) Continuum limit: ρ t + (ρu) = 0 u t + u u = ( α β u 2) u + [ ] 1 ρ(y) x y 2 γ (x y) dy
24 Exercise: It has an explicit milling steady state given by u = ρ(x) = { x r α β inside an annulus A : a < x < b?????, outside said annulus { ρ0 inside an annulus a < x < b 0, outside said annulus ; a 2 = α βγ ; b2 = 1 γ + α βγ. Numerical simulations show that this s.s. is stable for thick annulus but unstable for thin annulus: Movie : β = 1, γ = 0.2, α = (1 t/400)(t/400) (i.e. alpha goes from 0.1 to 1 then back to 0.1) Open question: Find the instability thresholds!!!
25 References Papers and movies ( tkolokol/papers) - Yuxin Chen and Theodore Kolokolnikov, A minimal model of predator-swarm dynamics, Journal of the Royal Society Interface 11: (2014) - Hayley. Tompkins and T. Kolokolnikov, Swarm shape and its dynamics in a predator-swarm model, to appear, SIAM Undergraduate Research Online. Thank you!
Swarm shape and its dynamics in a predator-swarm model
 Swarm shape and its dynamics in a predator-swarm model Hayley Tomkins and Theodore Kolokolnikov November 5, 014 Abstract We consider a particle predator-swarm model introduced in [1]. In the continuum
Swarm shape and its dynamics in a predator-swarm model Hayley Tomkins and Theodore Kolokolnikov November 5, 014 Abstract We consider a particle predator-swarm model introduced in [1]. In the continuum
Swarm shape and its dynamics in a predator-swarm model
 Swarm shape and its dynamics in a predator-swarm model Hayley Tomkins Advised by Theodore Kolokolnikov June 5, 015 Abstract We consider a particle predator-swarm model introduced in [1]. In the continuum
Swarm shape and its dynamics in a predator-swarm model Hayley Tomkins Advised by Theodore Kolokolnikov June 5, 015 Abstract We consider a particle predator-swarm model introduced in [1]. In the continuum
Contagion Modeling. 1 Introduction to contagion modeling and crowd survival
 Contagion Modeling Chen, Yuxin Mackey, Alan Royston, Michael Totari, Emad August 10, 01 1 Introduction to contagion modeling and crowd survival Large groups of individuals defending themselves from an
Contagion Modeling Chen, Yuxin Mackey, Alan Royston, Michael Totari, Emad August 10, 01 1 Introduction to contagion modeling and crowd survival Large groups of individuals defending themselves from an
Entrainment Alex Bowie April 7, 2004
 Entrainment Alex Bowie April 7, 2004 Abstract The driven Van der Pol oscillator displays entrainment, quasiperiodicity, and chaos. The characteristics of these different modes are discussed as well as
Entrainment Alex Bowie April 7, 2004 Abstract The driven Van der Pol oscillator displays entrainment, quasiperiodicity, and chaos. The characteristics of these different modes are discussed as well as
Equilibria for a two-dimensional aggregation model with two species
 Equilibria for a two-dimensional aggregation model with two species Joep H.M. Evers Razvan C. Fetecau Theodore Kolokolnikov August 1, 17 Abstract We consider an aggregation model for two interacting species.
Equilibria for a two-dimensional aggregation model with two species Joep H.M. Evers Razvan C. Fetecau Theodore Kolokolnikov August 1, 17 Abstract We consider an aggregation model for two interacting species.
3.5 Competition Models: Principle of Competitive Exclusion
 94 3. Models for Interacting Populations different dimensional parameter changes. For example, doubling the carrying capacity K is exactly equivalent to halving the predator response parameter D. The dimensionless
94 3. Models for Interacting Populations different dimensional parameter changes. For example, doubling the carrying capacity K is exactly equivalent to halving the predator response parameter D. The dimensionless
Lecture 3 : Bifurcation Analysis
 Lecture 3 : Bifurcation Analysis D. Sumpter & S.C. Nicolis October - December 2008 D. Sumpter & S.C. Nicolis General settings 4 basic bifurcations (as long as there is only one unstable mode!) steady state
Lecture 3 : Bifurcation Analysis D. Sumpter & S.C. Nicolis October - December 2008 D. Sumpter & S.C. Nicolis General settings 4 basic bifurcations (as long as there is only one unstable mode!) steady state
1.Introduction: 2. The Model. Key words: Prey, Predator, Seasonality, Stability, Bifurcations, Chaos.
 Dynamical behavior of a prey predator model with seasonally varying parameters Sunita Gakkhar, BrhamPal Singh, R K Naji Department of Mathematics I I T Roorkee,47667 INDIA Abstract : A dynamic model based
Dynamical behavior of a prey predator model with seasonally varying parameters Sunita Gakkhar, BrhamPal Singh, R K Naji Department of Mathematics I I T Roorkee,47667 INDIA Abstract : A dynamic model based
Basins of Attraction and Perturbed Numerical Solutions using Euler s Method
 Basins of Attraction and Perturbed Numerical Solutions using Euler s Method Hendrik Orem 8 May 2008 1 Introduction 1.1 Motivation Any physical system corresponding to a two-dimensional vector field has
Basins of Attraction and Perturbed Numerical Solutions using Euler s Method Hendrik Orem 8 May 2008 1 Introduction 1.1 Motivation Any physical system corresponding to a two-dimensional vector field has
Math 215/255 Final Exam (Dec 2005)
") Exam (Dec 2005) Last Student #: First name: Signature: Circle your section #: Burggraf=0, Peterson=02, Khadra=03, Burghelea=04, Li=05 I have read and understood the instructions below: Please sign: Instructions:.
Exam (Dec 2005) Last Student #: First name: Signature: Circle your section #: Burggraf=0, Peterson=02, Khadra=03, Burghelea=04, Li=05 I have read and understood the instructions below: Please sign: Instructions:.
Exam in TMA4195 Mathematical Modeling Solutions
 Norwegian University of Science and Technology Department of Mathematical Sciences Page of 9 Exam in TMA495 Mathematical Modeling 6..07 Solutions Problem a Here x, y are two populations varying with time
Norwegian University of Science and Technology Department of Mathematical Sciences Page of 9 Exam in TMA495 Mathematical Modeling 6..07 Solutions Problem a Here x, y are two populations varying with time
Celestial Mechanics of Asteroid Systems
 Celestial Mechanics of Asteroid Systems D.J. Scheeres Department of Aerospace Engineering Sciences The University of Colorado scheeres@colorado.edu 1 Granular Mechanics and Asteroids Asteroid systems are
Celestial Mechanics of Asteroid Systems D.J. Scheeres Department of Aerospace Engineering Sciences The University of Colorado scheeres@colorado.edu 1 Granular Mechanics and Asteroids Asteroid systems are
Wave Phenomena Physics 15c. Lecture 8 LC Transmission Line Wave Reflection
 Wave Phenomena Physics 15c Lecture 8 LC Transmission Line Wave Reflection Midterm Exam #1 Midterm #1 has been graded Class average = 80.4 Standard deviation = 14.6 Your exam will be returned in the section
Wave Phenomena Physics 15c Lecture 8 LC Transmission Line Wave Reflection Midterm Exam #1 Midterm #1 has been graded Class average = 80.4 Standard deviation = 14.6 Your exam will be returned in the section
Gerardo Zavala. Math 388. Predator-Prey Models
 Gerardo Zavala Math 388 Predator-Prey Models Spring 2013 1 History In the 1920s A. J. Lotka developed a mathematical model for the interaction between two species. The mathematician Vito Volterra worked
Gerardo Zavala Math 388 Predator-Prey Models Spring 2013 1 History In the 1920s A. J. Lotka developed a mathematical model for the interaction between two species. The mathematician Vito Volterra worked
154 Chapter 9 Hints, Answers, and Solutions The particular trajectories are highlighted in the phase portraits below.
 54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
An Inverse Mass Expansion for Entanglement Entropy. Free Massive Scalar Field Theory
 in Free Massive Scalar Field Theory NCSR Demokritos National Technical University of Athens based on arxiv:1711.02618 [hep-th] in collaboration with Dimitris Katsinis March 28 2018 Entanglement and Entanglement
in Free Massive Scalar Field Theory NCSR Demokritos National Technical University of Athens based on arxiv:1711.02618 [hep-th] in collaboration with Dimitris Katsinis March 28 2018 Entanglement and Entanglement
Point Vortex Dynamics in Two Dimensions
 Spring School on Fluid Mechanics and Geophysics of Environmental Hazards 9 April to May, 9 Point Vortex Dynamics in Two Dimensions Ruth Musgrave, Mostafa Moghaddami, Victor Avsarkisov, Ruoqian Wang, Wei
Spring School on Fluid Mechanics and Geophysics of Environmental Hazards 9 April to May, 9 Point Vortex Dynamics in Two Dimensions Ruth Musgrave, Mostafa Moghaddami, Victor Avsarkisov, Ruoqian Wang, Wei
Basic Aspects of Discretization
 Basic Aspects of Discretization Solution Methods Singularity Methods Panel method and VLM Simple, very powerful, can be used on PC Nonlinear flow effects were excluded Direct numerical Methods (Field Methods)
Basic Aspects of Discretization Solution Methods Singularity Methods Panel method and VLM Simple, very powerful, can be used on PC Nonlinear flow effects were excluded Direct numerical Methods (Field Methods)
Numerical Methods for Modern Traffic Flow Models. Alexander Kurganov
 Numerical Methods for Modern Traffic Flow Models Alexander Kurganov Tulane University Mathematics Department www.math.tulane.edu/ kurganov joint work with Pierre Degond, Université Paul Sabatier, Toulouse
Numerical Methods for Modern Traffic Flow Models Alexander Kurganov Tulane University Mathematics Department www.math.tulane.edu/ kurganov joint work with Pierre Degond, Université Paul Sabatier, Toulouse
CH.1. DESCRIPTION OF MOTION. Continuum Mechanics Course (MMC)
") CH.1. DESCRIPTION OF MOTION Continuum Mechanics Course (MMC) Overview 1.1. Definition of the Continuous Medium 1.1.1. Concept of Continuum 1.1.. Continuous Medium or Continuum 1.. Equations of Motion 1..1
CH.1. DESCRIPTION OF MOTION Continuum Mechanics Course (MMC) Overview 1.1. Definition of the Continuous Medium 1.1.1. Concept of Continuum 1.1.. Continuous Medium or Continuum 1.. Equations of Motion 1..1
STABILITY ANALYSIS OF DYNAMIC SYSTEMS
 C. Melchiorri (DEI) Automatic Control & System Theory 1 AUTOMATIC CONTROL AND SYSTEM THEORY STABILITY ANALYSIS OF DYNAMIC SYSTEMS Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e
C. Melchiorri (DEI) Automatic Control & System Theory 1 AUTOMATIC CONTROL AND SYSTEM THEORY STABILITY ANALYSIS OF DYNAMIC SYSTEMS Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e
E209A: Analysis and Control of Nonlinear Systems Problem Set 3 Solutions
 E09A: Analysis and Control of Nonlinear Systems Problem Set 3 Solutions Michael Vitus Stanford University Winter 007 Problem : Planar phase portraits. Part a Figure : Problem a This phase portrait is correct.
E09A: Analysis and Control of Nonlinear Systems Problem Set 3 Solutions Michael Vitus Stanford University Winter 007 Problem : Planar phase portraits. Part a Figure : Problem a This phase portrait is correct.
Dynamical systems tutorial. Gregor Schöner, INI, RUB
 Dynamical systems tutorial Gregor Schöner, INI, RUB Dynamical systems: Tutorial the word dynamics time-varying measures range of a quantity forces causing/accounting for movement => dynamical systems dynamical
Dynamical systems tutorial Gregor Schöner, INI, RUB Dynamical systems: Tutorial the word dynamics time-varying measures range of a quantity forces causing/accounting for movement => dynamical systems dynamical
u n 2 4 u n 36 u n 1, n 1.
 Exercise 1 Let (u n ) be the sequence defined by Set v n = u n 1 x+ u n and f (x) = 4 x. 1. Solve the equations f (x) = 1 and f (x) =. u 0 = 0, n Z +, u n+1 = u n + 4 u n.. Prove that if u n < 1, then
Exercise 1 Let (u n ) be the sequence defined by Set v n = u n 1 x+ u n and f (x) = 4 x. 1. Solve the equations f (x) = 1 and f (x) =. u 0 = 0, n Z +, u n+1 = u n + 4 u n.. Prove that if u n < 1, then
Control of Mobile Robots
 Control of Mobile Robots Regulation and trajectory tracking Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Organization and
Control of Mobile Robots Regulation and trajectory tracking Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Organization and
1 Lyapunov theory of stability
 M.Kawski, APM 581 Diff Equns Intro to Lyapunov theory. November 15, 29 1 1 Lyapunov theory of stability Introduction. Lyapunov s second (or direct) method provides tools for studying (asymptotic) stability
M.Kawski, APM 581 Diff Equns Intro to Lyapunov theory. November 15, 29 1 1 Lyapunov theory of stability Introduction. Lyapunov s second (or direct) method provides tools for studying (asymptotic) stability
Dynamical Systems and Chaos Part II: Biology Applications. Lecture 6: Population dynamics. Ilya Potapov Mathematics Department, TUT Room TD325
 Dynamical Systems and Chaos Part II: Biology Applications Lecture 6: Population dynamics Ilya Potapov Mathematics Department, TUT Room TD325 Living things are dynamical systems Dynamical systems theory
Dynamical Systems and Chaos Part II: Biology Applications Lecture 6: Population dynamics Ilya Potapov Mathematics Department, TUT Room TD325 Living things are dynamical systems Dynamical systems theory
Crime Modeling with Lévy Flights
 Crime Modeling with Lévy Flights Jonah Breslau, 1 Sorathan (Tum) Chaturapruek, 2 Daniel Yazdi 3 Mentors: Professor Theodore Kolokolnikov, 4 Professor Scott McCalla 3 1 Pomona College 2 Harvey Mudd College
Crime Modeling with Lévy Flights Jonah Breslau, 1 Sorathan (Tum) Chaturapruek, 2 Daniel Yazdi 3 Mentors: Professor Theodore Kolokolnikov, 4 Professor Scott McCalla 3 1 Pomona College 2 Harvey Mudd College
Equations of linear stellar oscillations
 Chapter 4 Equations of linear stellar oscillations In the present chapter the equations governing small oscillations around a spherical equilibrium state are derived. The general equations were presented
Chapter 4 Equations of linear stellar oscillations In the present chapter the equations governing small oscillations around a spherical equilibrium state are derived. The general equations were presented
TMA 4195 Mathematical Modelling December 12, 2007 Solution with additional comments
 Problem TMA 495 Mathematical Modelling December, 007 Solution with additional comments The air resistance, F, of a car depends on its length, L, cross sectional area, A, its speed relative to the air,
Problem TMA 495 Mathematical Modelling December, 007 Solution with additional comments The air resistance, F, of a car depends on its length, L, cross sectional area, A, its speed relative to the air,
Math 312 Lecture Notes Linear Two-dimensional Systems of Differential Equations
 Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
Math 232, Final Test, 20 March 2007
 Math 232, Final Test, 20 March 2007 Name: Instructions. Do any five of the first six questions, and any five of the last six questions. Please do your best, and show all appropriate details in your solutions.
Math 232, Final Test, 20 March 2007 Name: Instructions. Do any five of the first six questions, and any five of the last six questions. Please do your best, and show all appropriate details in your solutions.
New Physical Principle for Monte-Carlo simulations
 EJTP 6, No. 21 (2009) 9 20 Electronic Journal of Theoretical Physics New Physical Principle for Monte-Carlo simulations Michail Zak Jet Propulsion Laboratory California Institute of Technology, Advance
EJTP 6, No. 21 (2009) 9 20 Electronic Journal of Theoretical Physics New Physical Principle for Monte-Carlo simulations Michail Zak Jet Propulsion Laboratory California Institute of Technology, Advance
Math 10C - Fall Final Exam
 Math 1C - Fall 217 - Final Exam Problem 1. Consider the function f(x, y) = 1 x 2 (y 1) 2. (i) Draw the level curve through the point P (1, 2). Find the gradient of f at the point P and draw the gradient
Math 1C - Fall 217 - Final Exam Problem 1. Consider the function f(x, y) = 1 x 2 (y 1) 2. (i) Draw the level curve through the point P (1, 2). Find the gradient of f at the point P and draw the gradient
Physics 127b: Statistical Mechanics. Renormalization Group: 1d Ising Model. Perturbation expansion
 Physics 17b: Statistical Mechanics Renormalization Group: 1d Ising Model The ReNormalization Group (RNG) gives an understanding of scaling and universality, and provides various approximation schemes to
Physics 17b: Statistical Mechanics Renormalization Group: 1d Ising Model The ReNormalization Group (RNG) gives an understanding of scaling and universality, and provides various approximation schemes to
1 Assignment 1: Nonlinear dynamics (due September
 Assignment : Nonlinear dynamics (due September 4, 28). Consider the ordinary differential equation du/dt = cos(u). Sketch the equilibria and indicate by arrows the increase or decrease of the solutions.
Assignment : Nonlinear dynamics (due September 4, 28). Consider the ordinary differential equation du/dt = cos(u). Sketch the equilibria and indicate by arrows the increase or decrease of the solutions.
BIFURCATION AND OF THE GENERALIZED COMPLEX GINZBURG LANDAU EQUATION
 BIFURCATION AND OF THE GENERALIZED COMPLEX GINZBURG LANDAU EQUATION JUNGHO PARK Abstract. We study in this paper the bifurcation and stability of the solutions of the complex Ginzburg Landau equation(cgle).
BIFURCATION AND OF THE GENERALIZED COMPLEX GINZBURG LANDAU EQUATION JUNGHO PARK Abstract. We study in this paper the bifurcation and stability of the solutions of the complex Ginzburg Landau equation(cgle).
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
Robot Control Basics CS 685
 Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
Lecture 1: Entropy, convexity, and matrix scaling CSE 599S: Entropy optimality, Winter 2016 Instructor: James R. Lee Last updated: January 24, 2016
 Lecture 1: Entropy, convexity, and matrix scaling CSE 599S: Entropy optimality, Winter 2016 Instructor: James R. Lee Last updated: January 24, 2016 1 Entropy Since this course is about entropy maximization,
Lecture 1: Entropy, convexity, and matrix scaling CSE 599S: Entropy optimality, Winter 2016 Instructor: James R. Lee Last updated: January 24, 2016 1 Entropy Since this course is about entropy maximization,
STABILITY. Phase portraits and local stability
 MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation
 MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation 1 Bifurcations in Multiple Dimensions When we were considering one-dimensional systems, we saw that subtle changes in parameter
MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation 1 Bifurcations in Multiple Dimensions When we were considering one-dimensional systems, we saw that subtle changes in parameter
1. A moving kaon decays into two pions, one of which is left at rest. (m K
 Physics Qualifying Examination Part I September 12, 2015 7-Minute Questions 1. A moving kaon decays into two pions, one of which is left at rest. (m K 500 MeV, m π = 140 MeV). a. What is the total energy
Physics Qualifying Examination Part I September 12, 2015 7-Minute Questions 1. A moving kaon decays into two pions, one of which is left at rest. (m K 500 MeV, m π = 140 MeV). a. What is the total energy
Lecture 20/Lab 21: Systems of Nonlinear ODEs
 Lecture 20/Lab 21: Systems of Nonlinear ODEs MAR514 Geoffrey Cowles Department of Fisheries Oceanography School for Marine Science and Technology University of Massachusetts-Dartmouth Coupled ODEs: Species
Lecture 20/Lab 21: Systems of Nonlinear ODEs MAR514 Geoffrey Cowles Department of Fisheries Oceanography School for Marine Science and Technology University of Massachusetts-Dartmouth Coupled ODEs: Species
Scroll Waves in Anisotropic Excitable Media with Application to the Heart. Sima Setayeshgar Department of Physics Indiana University
 Scroll Waves in Anisotropic Excitable Media with Application to the Heart Sima Setayeshgar Department of Physics Indiana University KITP Cardiac Dynamics Mini-Program 1 Stripes, Spots and Scrolls KITP
Scroll Waves in Anisotropic Excitable Media with Application to the Heart Sima Setayeshgar Department of Physics Indiana University KITP Cardiac Dynamics Mini-Program 1 Stripes, Spots and Scrolls KITP
MATH 425, HOMEWORK 3 SOLUTIONS
 MATH 425, HOMEWORK 3 SOLUTIONS Exercise. (The differentiation property of the heat equation In this exercise, we will use the fact that the derivative of a solution to the heat equation again solves the
MATH 425, HOMEWORK 3 SOLUTIONS Exercise. (The differentiation property of the heat equation In this exercise, we will use the fact that the derivative of a solution to the heat equation again solves the
A Simple Predator-Prey Swarming Model. Abstract
 A Simple Predator-Prey Swarming Model Vladimir Zhdankin and J. C. Sprott Department of Physics, University of Wisconsin-Madison (Dated: July 3, 2010) Abstract This paper describes an individual-based model
A Simple Predator-Prey Swarming Model Vladimir Zhdankin and J. C. Sprott Department of Physics, University of Wisconsin-Madison (Dated: July 3, 2010) Abstract This paper describes an individual-based model
Stability Analysis And Maximum Profit Of Logistic Population Model With Time Delay And Constant Effort Of Harvesting
 Jurnal Vol 3, Matematika, No, 9-8, Juli Statistika 006 & Komputasi Vol No Juli 006 9-8, Juli 006 9 Stability Analysis And Maximum Profit Of Logistic Population Model With Time Delay And Constant Effort
Jurnal Vol 3, Matematika, No, 9-8, Juli Statistika 006 & Komputasi Vol No Juli 006 9-8, Juli 006 9 Stability Analysis And Maximum Profit Of Logistic Population Model With Time Delay And Constant Effort
Aim: Understand equilibrium of galaxies
 8. Galactic Dynamics Aim: Understand equilibrium of galaxies 1. What are the dominant forces? 2. Can we define some kind of equilibrium? 3. What are the relevant timescales? 4. Do galaxies evolve along
8. Galactic Dynamics Aim: Understand equilibrium of galaxies 1. What are the dominant forces? 2. Can we define some kind of equilibrium? 3. What are the relevant timescales? 4. Do galaxies evolve along
On Hamiltonian perturbations of hyperbolic PDEs
 Bologna, September 24, 2004 On Hamiltonian perturbations of hyperbolic PDEs Boris DUBROVIN SISSA (Trieste) Class of 1+1 evolutionary systems w i t +Ai j (w)wj x +ε (B i j (w)wj xx + 1 2 Ci jk (w)wj x wk
Bologna, September 24, 2004 On Hamiltonian perturbations of hyperbolic PDEs Boris DUBROVIN SISSA (Trieste) Class of 1+1 evolutionary systems w i t +Ai j (w)wj x +ε (B i j (w)wj xx + 1 2 Ci jk (w)wj x wk
8 Ecosystem stability
 8 Ecosystem stability References: May [47], Strogatz [48]. In these lectures we consider models of populations, with an emphasis on the conditions for stability and instability. 8.1 Dynamics of a single
8 Ecosystem stability References: May [47], Strogatz [48]. In these lectures we consider models of populations, with an emphasis on the conditions for stability and instability. 8.1 Dynamics of a single
Gradient Flows: Qualitative Properties & Numerical Schemes
 Gradient Flows: Qualitative Properties & Numerical Schemes J. A. Carrillo Imperial College London RICAM, December 2014 Outline 1 Gradient Flows Models Gradient flows Evolving diffeomorphisms 2 Numerical
Gradient Flows: Qualitative Properties & Numerical Schemes J. A. Carrillo Imperial College London RICAM, December 2014 Outline 1 Gradient Flows Models Gradient flows Evolving diffeomorphisms 2 Numerical
Maxwell s equations for electrostatics
 Maxwell s equations for electrostatics October 6, 5 The differential form of Gauss s law Starting from the integral form of Gauss s law, we treat the charge as a continuous distribution, ρ x. Then, letting
Maxwell s equations for electrostatics October 6, 5 The differential form of Gauss s law Starting from the integral form of Gauss s law, we treat the charge as a continuous distribution, ρ x. Then, letting
Fundamentals of Atmospheric Modelling
 M.Sc. in Computational Science Fundamentals of Atmospheric Modelling Peter Lynch, Met Éireann Mathematical Computation Laboratory (Opp. Room 30) Dept. of Maths. Physics, UCD, Belfield. January April, 2004.
M.Sc. in Computational Science Fundamentals of Atmospheric Modelling Peter Lynch, Met Éireann Mathematical Computation Laboratory (Opp. Room 30) Dept. of Maths. Physics, UCD, Belfield. January April, 2004.
UNIVERSITY of LIMERICK
 UNIVERSITY of LIMERICK OLLSCOIL LUIMNIGH Faculty of Science and Engineering END OF SEMESTER ASSESSMENT PAPER MODULE CODE: MA4607 SEMESTER: Autumn 2012-13 MODULE TITLE: Introduction to Fluids DURATION OF
UNIVERSITY of LIMERICK OLLSCOIL LUIMNIGH Faculty of Science and Engineering END OF SEMESTER ASSESSMENT PAPER MODULE CODE: MA4607 SEMESTER: Autumn 2012-13 MODULE TITLE: Introduction to Fluids DURATION OF
Dynamical Systems: Ecological Modeling
 Dynamical Systems: Ecological Modeling G Söderbacka Abstract Ecological modeling is becoming increasingly more important for modern engineers. The mathematical language of dynamical systems has been applied
Dynamical Systems: Ecological Modeling G Söderbacka Abstract Ecological modeling is becoming increasingly more important for modern engineers. The mathematical language of dynamical systems has been applied
Taylor and Laurent Series
 Chapter 4 Taylor and Laurent Series 4.. Taylor Series 4... Taylor Series for Holomorphic Functions. In Real Analysis, the Taylor series of a given function f : R R is given by: f (x + f (x (x x + f (x
Chapter 4 Taylor and Laurent Series 4.. Taylor Series 4... Taylor Series for Holomorphic Functions. In Real Analysis, the Taylor series of a given function f : R R is given by: f (x + f (x (x x + f (x
Random Averaging. Eli Ben-Naim Los Alamos National Laboratory. Paul Krapivsky (Boston University) John Machta (University of Massachusetts)
 John Machta (University of Massachusetts)") Random Averaging Eli Ben-Naim Los Alamos National Laboratory Paul Krapivsky (Boston University) John Machta (University of Massachusetts) Talk, papers available from: http://cnls.lanl.gov/~ebn Plan I.
Random Averaging Eli Ben-Naim Los Alamos National Laboratory Paul Krapivsky (Boston University) John Machta (University of Massachusetts) Talk, papers available from: http://cnls.lanl.gov/~ebn Plan I.
Physics 4488/6562: Statistical Mechanics Material for Week 2 Exercises due Monday Feb 5 Last
 Physics 4488/6562: Statistical Mechanics http://www.physics.cornell.edu/sethna/teaching/562/ Material for Week 2 Exercises due Monday Feb 5 Last correction at January 26, 218, 11:5 am c 217, James Sethna,
Physics 4488/6562: Statistical Mechanics http://www.physics.cornell.edu/sethna/teaching/562/ Material for Week 2 Exercises due Monday Feb 5 Last correction at January 26, 218, 11:5 am c 217, James Sethna,
Andronov Hopf and Bautin bifurcation in a tritrophic food chain model with Holling functional response types IV and II
 Electronic Journal of Qualitative Theory of Differential Equations 018 No 78 1 7; https://doiorg/10143/ejqtde018178 wwwmathu-szegedhu/ejqtde/ Andronov Hopf and Bautin bifurcation in a tritrophic food chain
Electronic Journal of Qualitative Theory of Differential Equations 018 No 78 1 7; https://doiorg/10143/ejqtde018178 wwwmathu-szegedhu/ejqtde/ Andronov Hopf and Bautin bifurcation in a tritrophic food chain
Composable Group Behaviors
 Composable Group Behaviors Perpetual Amoah Undergraduate S. Researcher Sam Rodriguez Graduate Student Mentor Jyh-Ming Lien Graduate Student Mentor John Maffei Graduate Student Mentor Nancy M. Amato Faculty
Composable Group Behaviors Perpetual Amoah Undergraduate S. Researcher Sam Rodriguez Graduate Student Mentor Jyh-Ming Lien Graduate Student Mentor John Maffei Graduate Student Mentor Nancy M. Amato Faculty
Mathematics for Economists
 Mathematics for Economists Victor Filipe Sao Paulo School of Economics FGV Metric Spaces: Basic Definitions Victor Filipe (EESP/FGV) Mathematics for Economists Jan.-Feb. 2017 1 / 34 Definitions and Examples
Mathematics for Economists Victor Filipe Sao Paulo School of Economics FGV Metric Spaces: Basic Definitions Victor Filipe (EESP/FGV) Mathematics for Economists Jan.-Feb. 2017 1 / 34 Definitions and Examples
Overview spherical accretion
 Spherical accretion - AGN generates energy by accretion, i.e., capture of ambient matter in gravitational potential of black hole -Potential energy can be released as radiation, and (some of) this can
Spherical accretion - AGN generates energy by accretion, i.e., capture of ambient matter in gravitational potential of black hole -Potential energy can be released as radiation, and (some of) this can
= F ( x; µ) (1) where x is a 2-dimensional vector, µ is a parameter, and F :
 (1) where x is a 2-dimensional vector, µ is a parameter, and F :") 1 Bifurcations Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 A bifurcation is a qualitative change
1 Bifurcations Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 A bifurcation is a qualitative change
Travelling bubbles in a moving boundary problem of Hele-Shaw type
 Travelling bubbles in a moving boundary problem of Hele-Shaw type G. Prokert, TU Eindhoven Center for Analysis, Scientific Computing, and Applications (CASA) g.prokert@tue.nl Joint work with M. Günther,
Travelling bubbles in a moving boundary problem of Hele-Shaw type G. Prokert, TU Eindhoven Center for Analysis, Scientific Computing, and Applications (CASA) g.prokert@tue.nl Joint work with M. Günther,
3 Single species models. Reading: Otto & Day (2007) section 4.2.1
 section 4.2.1") 3 Single species models 3.1 Exponential growth Reading: Otto & Day (2007) section 4.2.1 We can solve equation 17 to find the population at time t given a starting population N(0) = N 0 as follows. N(t)
3 Single species models 3.1 Exponential growth Reading: Otto & Day (2007) section 4.2.1 We can solve equation 17 to find the population at time t given a starting population N(0) = N 0 as follows. N(t)
HW 3 Solution Key. Classical Mechanics I HW # 3 Solution Key
 Classical Mechanics I HW # 3 Solution Key HW 3 Solution Key 1. (10 points) Suppose a system has a potential energy: U = A(x 2 R 2 ) 2 where A is a constant and R is me fixed distance from the origin (on
Classical Mechanics I HW # 3 Solution Key HW 3 Solution Key 1. (10 points) Suppose a system has a potential energy: U = A(x 2 R 2 ) 2 where A is a constant and R is me fixed distance from the origin (on
The Form of Swarms: A Primer of Swarm Equilibria
 The Form of Swarms: A Primer of Swarm Equilibria Andrew J. Bernoff Harvey Mudd College Chad M. Topaz Macalester College Supported by: National Science Foundation DMS-0740484 Andrew J. Bernoff Harvey Mudd
The Form of Swarms: A Primer of Swarm Equilibria Andrew J. Bernoff Harvey Mudd College Chad M. Topaz Macalester College Supported by: National Science Foundation DMS-0740484 Andrew J. Bernoff Harvey Mudd
Hamiltonian partial differential equations and Painlevé transcendents
 Winter School on PDEs St Etienne de Tinée February 2-6, 2015 Hamiltonian partial differential equations and Painlevé transcendents Boris DUBROVIN SISSA, Trieste Cauchy problem for evolutionary PDEs with
Winter School on PDEs St Etienne de Tinée February 2-6, 2015 Hamiltonian partial differential equations and Painlevé transcendents Boris DUBROVIN SISSA, Trieste Cauchy problem for evolutionary PDEs with
Simple Evaluation of the Chiral Jacobian with the Overlap Dirac Operator
 141 Progress of Theoretical Physics, Vol. 102, No. 1, July 1999 Simple Evaluation of the Chiral Jacobian with the Overlap Dirac Operator Hiroshi Suzuki ) Department of Physics, Ibaraki University, Mito
141 Progress of Theoretical Physics, Vol. 102, No. 1, July 1999 Simple Evaluation of the Chiral Jacobian with the Overlap Dirac Operator Hiroshi Suzuki ) Department of Physics, Ibaraki University, Mito
1 What Are Adaptations?
 1 What re? can be broadly classified into behavioural adaptations and structural adaptations. Study the pictures and descriptions of the animals below carefully and match them with the type(s) of adaptation
1 What re? can be broadly classified into behavioural adaptations and structural adaptations. Study the pictures and descriptions of the animals below carefully and match them with the type(s) of adaptation
Exercise 1 (Formula for connection 1-forms) Using the first structure equation, show that
 Using the first structure equation, show that") 1 Stokes s Theorem Let D R 2 be a connected compact smooth domain, so that D is a smooth embedded circle. Given a smooth function f : D R, define fdx dy fdxdy, D where the left-hand side is the integral
1 Stokes s Theorem Let D R 2 be a connected compact smooth domain, so that D is a smooth embedded circle. Given a smooth function f : D R, define fdx dy fdxdy, D where the left-hand side is the integral
Columbia University Department of Physics QUALIFYING EXAMINATION
 Columbia University Department of Physics QUALIFYING EXAMINATION Monday, January 14, 2013 3:10PM to 5:10PM Classical Physics Section 2. Electricity, Magnetism & Electrodynamics Two hours are permitted
Columbia University Department of Physics QUALIFYING EXAMINATION Monday, January 14, 2013 3:10PM to 5:10PM Classical Physics Section 2. Electricity, Magnetism & Electrodynamics Two hours are permitted
Differential equations, comprehensive exam topics and sample questions
 Differential equations, comprehensive exam topics and sample questions Topics covered ODE s: Chapters -5, 7, from Elementary Differential Equations by Edwards and Penney, 6th edition.. Exact solutions
Differential equations, comprehensive exam topics and sample questions Topics covered ODE s: Chapters -5, 7, from Elementary Differential Equations by Edwards and Penney, 6th edition.. Exact solutions
McGill University April 20, Advanced Calculus for Engineers
 McGill University April 0, 016 Faculty of Science Final examination Advanced Calculus for Engineers Math 64 April 0, 016 Time: PM-5PM Examiner: Prof. R. Choksi Associate Examiner: Prof. A. Hundemer Student
McGill University April 0, 016 Faculty of Science Final examination Advanced Calculus for Engineers Math 64 April 0, 016 Time: PM-5PM Examiner: Prof. R. Choksi Associate Examiner: Prof. A. Hundemer Student
Antiderivatives. Definition A function, F, is said to be an antiderivative of a function, f, on an interval, I, if. F x f x for all x I.
 Antiderivatives Definition A function, F, is said to be an antiderivative of a function, f, on an interval, I, if F x f x for all x I. Theorem If F is an antiderivative of f on I, then every function of
Antiderivatives Definition A function, F, is said to be an antiderivative of a function, f, on an interval, I, if F x f x for all x I. Theorem If F is an antiderivative of f on I, then every function of
Figure 1: Ca2+ wave in a Xenopus oocyte following fertilization. Time goes from top left to bottom right. From Fall et al., 2002.
 1 Traveling Fronts Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 2 When mature Xenopus oocytes (frog
1 Traveling Fronts Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 2 When mature Xenopus oocytes (frog
University of Illinois at Chicago Department of Physics. Electricity & Magnetism Qualifying Examination
 University of Illinois at Chicago Department of Physics Electricity & Magnetism Qualifying Examination January 7, 28 9. am 12: pm Full credit can be achieved from completely correct answers to 4 questions.
University of Illinois at Chicago Department of Physics Electricity & Magnetism Qualifying Examination January 7, 28 9. am 12: pm Full credit can be achieved from completely correct answers to 4 questions.
Short Note on Unification of Field Equations and Probability
 Physics and Mathematics The Haunted Fields 6 November 28 (v.2.) Short Note on Unification of Field Equations and Probability Mesut KAVAK Is math in harmony with existence? Is it possible to calculate any
Physics and Mathematics The Haunted Fields 6 November 28 (v.2.) Short Note on Unification of Field Equations and Probability Mesut KAVAK Is math in harmony with existence? Is it possible to calculate any
Threshold of singularity formation in the semilinear wave equation
 PHYSICAL REVIEW D 71, 044019 (2005) Threshold of singularity formation in the semilinear wave equation Steven L. Liebling Department of Physics, Long Island University-C.W. Post Campus, Brookville, New
PHYSICAL REVIEW D 71, 044019 (2005) Threshold of singularity formation in the semilinear wave equation Steven L. Liebling Department of Physics, Long Island University-C.W. Post Campus, Brookville, New
Introduction to Dynamical Systems
 Introduction to Dynamical Systems France-Kosovo Undergraduate Research School of Mathematics March 2017 This introduction to dynamical systems was a course given at the march 2017 edition of the France
Introduction to Dynamical Systems France-Kosovo Undergraduate Research School of Mathematics March 2017 This introduction to dynamical systems was a course given at the march 2017 edition of the France
Game Physics. Game and Media Technology Master Program - Utrecht University. Dr. Nicolas Pronost
 Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Rigid body physics Particle system Most simple instance of a physics system Each object (body) is a particle Each particle
Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Rigid body physics Particle system Most simple instance of a physics system Each object (body) is a particle Each particle
Problem set 7 Math 207A, Fall 2011 Solutions
 Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Hamiltonian partial differential equations and Painlevé transcendents
 The 6th TIMS-OCAMI-WASEDA Joint International Workshop on Integrable Systems and Mathematical Physics March 22-26, 2014 Hamiltonian partial differential equations and Painlevé transcendents Boris DUBROVIN
The 6th TIMS-OCAMI-WASEDA Joint International Workshop on Integrable Systems and Mathematical Physics March 22-26, 2014 Hamiltonian partial differential equations and Painlevé transcendents Boris DUBROVIN
Shilnikov bifurcations in the Hopf-zero singularity
 Shilnikov bifurcations in the Hopf-zero singularity Geometry and Dynamics in interaction Inma Baldomá, Oriol Castejón, Santiago Ibáñez, Tere M-Seara Observatoire de Paris, 15-17 December 2017, Paris Tere
Shilnikov bifurcations in the Hopf-zero singularity Geometry and Dynamics in interaction Inma Baldomá, Oriol Castejón, Santiago Ibáñez, Tere M-Seara Observatoire de Paris, 15-17 December 2017, Paris Tere
Physics 505 Homework No. 12 Solutions S12-1
 Physics 55 Homework No. 1 s S1-1 1. 1D ionization. This problem is from the January, 7, prelims. Consider a nonrelativistic mass m particle with coordinate x in one dimension that is subject to an attractive
Physics 55 Homework No. 1 s S1-1 1. 1D ionization. This problem is from the January, 7, prelims. Consider a nonrelativistic mass m particle with coordinate x in one dimension that is subject to an attractive
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Kinematics
 Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Kinematics Module 10 - Lecture 24 Kinematics of a particle moving on a curve Today,
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Kinematics Module 10 - Lecture 24 Kinematics of a particle moving on a curve Today,
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Transient Response of a Chemical Reactor Concentration of a substance in a chemical reactor
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Transient Response of a Chemical Reactor Concentration of a substance in a chemical reactor
2 The model with Kaldor-Pasinetti saving
 Applied Mathematical Sciences, Vol 6, 2012, no 72, 3569-3573 The Solow-Swan Model with Kaldor-Pasinetti Saving and Time Delay Luca Guerrini Department of Mathematics for Economic and Social Sciences University
Applied Mathematical Sciences, Vol 6, 2012, no 72, 3569-3573 The Solow-Swan Model with Kaldor-Pasinetti Saving and Time Delay Luca Guerrini Department of Mathematics for Economic and Social Sciences University
Section 4.3 Vector Fields
 Section 4.3 Vector Fields DEFINITION: A vector field in R n is a map F : A R n R n that assigns to each point x in its domain A a vector F(x). If n = 2, F is called a vector field in the plane, and if
Section 4.3 Vector Fields DEFINITION: A vector field in R n is a map F : A R n R n that assigns to each point x in its domain A a vector F(x). If n = 2, F is called a vector field in the plane, and if
2D-Volterra-Lotka Modeling For 2 Species
 Majalat Al-Ulum Al-Insaniya wat - Tatbiqiya 2D-Volterra-Lotka Modeling For 2 Species Alhashmi Darah 1 University of Almergeb Department of Mathematics Faculty of Science Zliten Libya. Abstract The purpose
Majalat Al-Ulum Al-Insaniya wat - Tatbiqiya 2D-Volterra-Lotka Modeling For 2 Species Alhashmi Darah 1 University of Almergeb Department of Mathematics Faculty of Science Zliten Libya. Abstract The purpose
Complex Systems Methods 9. Critical Phenomena: The Renormalization Group
 Complex Systems Methods 9. Critical Phenomena: The Renormalization Group Eckehard Olbrich e.olbrich@gmx.de http://personal-homepages.mis.mpg.de/olbrich/complex systems.html Potsdam WS 2007/08 Olbrich (Leipzig)
Complex Systems Methods 9. Critical Phenomena: The Renormalization Group Eckehard Olbrich e.olbrich@gmx.de http://personal-homepages.mis.mpg.de/olbrich/complex systems.html Potsdam WS 2007/08 Olbrich (Leipzig)
Lecture 17 - Gyroscopes
 Lecture 17 - Gyroscopes A Puzzle... We have seen throughout class that the center of mass is a very powerful tool for evaluating systems. However, don t let yourself get carried away with how useful it
Lecture 17 - Gyroscopes A Puzzle... We have seen throughout class that the center of mass is a very powerful tool for evaluating systems. However, don t let yourself get carried away with how useful it
THE WAVE EQUATION. d = 1: D Alembert s formula We begin with the initial value problem in 1 space dimension { u = utt u xx = 0, in (0, ) R, (2)
 R, (2)") THE WAVE EQUATION () The free wave equation takes the form u := ( t x )u = 0, u : R t R d x R In the literature, the operator := t x is called the D Alembertian on R +d. Later we shall also consider the
THE WAVE EQUATION () The free wave equation takes the form u := ( t x )u = 0, u : R t R d x R In the literature, the operator := t x is called the D Alembertian on R +d. Later we shall also consider the
dt = A x, x(0) = C. (1) where A is an n n matrix of constants, with n distinct eigenvalues. The solution formula is
 = C. (1) where A is an n n matrix of constants, with n distinct eigenvalues. The solution formula is") 5.4. Stability of first-order linear system Motivation: A solution needs to be stable in order to be useful in practice. The U.S. missile defense system is not yet stable. Consider d x = A x, x(0) = C.
5.4. Stability of first-order linear system Motivation: A solution needs to be stable in order to be useful in practice. The U.S. missile defense system is not yet stable. Consider d x = A x, x(0) = C.
Stability of an abstract wave equation with delay and a Kelvin Voigt damping
 Stability of an abstract wave equation with delay and a Kelvin Voigt damping University of Monastir/UPSAY/LMV-UVSQ Joint work with Serge Nicaise and Cristina Pignotti Outline 1 Problem The idea Stability
Stability of an abstract wave equation with delay and a Kelvin Voigt damping University of Monastir/UPSAY/LMV-UVSQ Joint work with Serge Nicaise and Cristina Pignotti Outline 1 Problem The idea Stability
Department of Mathematics IIT Guwahati
 Stability of Linear Systems in R 2 Department of Mathematics IIT Guwahati A system of first order differential equations is called autonomous if the system can be written in the form dx 1 dt = g 1(x 1,
Stability of Linear Systems in R 2 Department of Mathematics IIT Guwahati A system of first order differential equations is called autonomous if the system can be written in the form dx 1 dt = g 1(x 1,
On Prey-Predator with Group Defense
 ISSN 1749-3889 (print) 1749-3897 (online) International Journal of Nonlinear Science Vol.15(013) No.4pp.91-95 On Prey-Predator with Group Defense Ali A Hashem 1 I. Siddique 1 Department of Mathematics
ISSN 1749-3889 (print) 1749-3897 (online) International Journal of Nonlinear Science Vol.15(013) No.4pp.91-95 On Prey-Predator with Group Defense Ali A Hashem 1 I. Siddique 1 Department of Mathematics
A Continuous Counterpart to Schwarzschild s Liquid Sphere Model
 A Continuous Counterpart to Schwarzschild s Liquid Sphere Model N.S. Baaklini nsbqft@aol.com Abstract We present a continuous counterpart to Schwarzschild s metrical model of a constant-density sphere.
A Continuous Counterpart to Schwarzschild s Liquid Sphere Model N.S. Baaklini nsbqft@aol.com Abstract We present a continuous counterpart to Schwarzschild s metrical model of a constant-density sphere.
Lecture XIX: Particle motion exterior to a spherical star
 Lecture XIX: Particle motion exterior to a spherical star Christopher M. Hirata Caltech M/C 350-7, Pasadena CA 95, USA Dated: January 8, 0 I. OVERVIEW Our next objective is to consider the motion of test
Lecture XIX: Particle motion exterior to a spherical star Christopher M. Hirata Caltech M/C 350-7, Pasadena CA 95, USA Dated: January 8, 0 I. OVERVIEW Our next objective is to consider the motion of test