EECS 442 Computer vision. Multiple view geometry Affine structure from Motion
|
|
|
- Miranda Wiggins
- 6 years ago
- Views:
Transcription

1 EECS 442 Computer visio Multiple view geometry Affie structure from Motio - Affie structure from motio problem - Algebraic methods - Factorizatio methods Readig: [HZ] Chapters: 6,4,8 [FP] Chapter: 2 Some slides of this lectures are courtesy of prof. J. Poce, prof FF Li, prof S. Lazebik & prof. M. Hebert
2 Structure from motio problem X j j M m M mj 2j M 2 Give m images of fied 3D poits ij M i X j, i,, m, j,,
3 Structure from motio problem X j j M m M mj 2j M 2 From the m correspodeces ij, estimate: m projectio matrices M i 3D poits X j motio structure


4 Applicatios Courtesy of Oford Visual Geometry Group
5 Affie structure from motio (simpler problem) Image World Image From the m correspodeces ij, estimate: m projectio matrices M i (affie cameras) 3D poits X j
6 Fiite cameras p q r R Q P O [ ]X T K R T R K M 3 3 M Caoical perspective projectio matri Affie homography (i 3D) Affie Homography (i 2D) y s K o y o α α


7 Trasformatio i 2D Affiities: y H y t A y' ' a -Preserve: - Parallel lies - Ratio of areas - Ratio of legths o colliear lies - others - 6 DOF
8 Weak perspective projectio Whe the relative scee depth is small compared to its distace from the camera P ~ ' m y' my where m f z ' is the magificatio.
9 Weak perspective projectio Whe the relative scee depth is small compared to its distace from the camera ' m y' my Scalig fuctio of the distace (magificatio)
10 Orthographic (affie) projectio Whe the camera is at a (roughly costat) distace from the scee ' y' y Distace from ceter of projectio to image plae is ifiite
11 Orthographic (affie) projectio Whe the camera is at a (roughly costat) distace from the scee
12 Affie cameras [ ]X T K R T R K M y s K o y o α α Projective case Affie case
13 Trasformatio i 2D Projective: y H y b v t A y' ' p Affiities: y H y t A y' ' a
14 Affie cameras [ ]X T K R y α s α o y o K T R K M T R K M y s K o y o α α Projective case Affie case Parallel projectio matri (poits at ifiity are mapped as poits at ifiity) Magificatio (scalig term)

15 Weak perspective projectio Qigmig Festival by the Riverside Zhag Zedua ~9 AD
16 Affie cameras [ ]X T K R y K α α T R K M b A 4affie] [4 3affie] 3 [ b a a a b a a a M X b AX Euc M b b Z Y X a a a a a a y [Homogeeous] [o-homogeeous image coordiates] [ ] b A M M Euc ; P M Euc
17 Affie cameras p P p M camera matri To recap: from ow o we defie M as the camera matri for the affie case p u v AP + b M P ; M [ A b]
18 The Affie Structure-from-Motio Problem Give m images of fied poits P j (X i ) we ca write N of cameras N of poits Problem: estimate the m 2 4 matrices M i ad the positios P j from the m correspodeces p ij. How may equatios ad how may ukow? 2m equatios i 8m+3 ukows Two approaches: - Algebraic approach (affie epipolar geometry; estimate F; cameras; poits) - Factorizatio method
19 Algebraic aalysis (2-view case) - Derive the fudametal matri F A for the affie case - Compute F A - Use F A to estimate projectio matrices - Use projectio matrices to estimate 3D poits
20 . Derivig the fudametal matri F A p P v p u Homogeeous system Dim? 44
21 Derivig the fudametal matri F A where The Affie Fudametal Matri!
22 Affie Epipolar Geometry Note: the epipolar lies are parallel.
23
24 Estimatig F A From at least 4 correspodeces, we obtai a liear system o the ukow alpha, beta, etc Measuremets: u, u, v, v v u v u v u v u f M M M M M Computed by least square ad by eforcig f SVD
25 Estimatig projectio matrices from epipolar costraits p P p
26 Affie ambiguity Affie PX ( PQ - )( Q X) A A
27 Estimatig projectio matrices from epipolar costraits p P p
28 Estimatig projectio matrices from epipolar costraits Choose Q such that A ~ ~ b [ ] T A ~ a ~ b b [ d] T c Caoical affie cameras Fuctio of the parameters of F
29 Estimatig projectio matrices from epipolar costraits Choose Q such that By re-eforcig the epipolar costrait, we ca compute a, b, c, d directly from the measuremets
30 Remider: epipolar costrait p P v p u Homogeeous system
31 Estimatig projectio matrices from epipolar costraits Choose Q such that ~ A ~ b Re-eforce the Epipolar costrait
32 Estimatig projectio matrices from epipolar costraits Choose Q such that A b
33 Estimatig projectio matrices from epipolar costraits Liear relatioship betwee measuremets ad ukow Ukow: a, b, c, d Measuremets: u, u, v, v From at least 4 correspodeces, we ca solve this liear system ad compute a, b, c, d (via least square) The cameras ca be computed How about the structure?
34 4. Estimatig the structure from epipolar costraits A b Ca be solved by least square agai
35 A factorizatio method Tomasi & Kaade algorithm C. Tomasi ad T. Kaade. Shape ad motio from image streams uder orthography: A factorizatio method. IJCV, 9(2):37-54, November 992. Ceterig the data Factorizatio
36 Ceterig: subtract the cetroid of the image poits ( ) j i k k j i k i k i i j i k ik ij ij ˆ ˆ A X X X A b A X b A X + + A factorizatio method - Ceterig the data X k ik i ^
37 Ceterig: subtract the cetroid of the image poits ( ) j i k k j i k i k i i j i k ik ij ij ˆ ˆ A X X X A b A X b A X + + A factorizatio method - Ceterig the data
38 Ceterig: subtract the cetroid of the image poits ( ) + + k k j i k i k i i j i k ik ij ij ˆ X X A b A X b A X j i ij X A ˆ A factorizatio method - Ceterig the data Assume that the origi of the world coordiate system is at the cetroid of the 3D poits After ceterig, each ormalized poit ij is related to the 3D poit X i by
39 A factorizatio method - Ceterig the data X ˆ A ij i X j
40 Let s create a 2m data (measuremet) matri: m m m D ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ L O L L cameras (2m ) poits ( ) A factorizatio method - factorizatio
41 Let s create a 2m data (measuremet) matri: [ ] m m m m X X X A A A D L M L O L L ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ cameras (2m 3) poits (3 ) The measuremet matri D M S has rak 3 (it s a product of a 2m3 matri ad 3 matri) A factorizatio method - factorizatio (2m ) M S

42 Factorizig the measuremet matri Source: M. Hebert

43 Factorizig the measuremet matri Sigular value decompositio of D: Source: M. Hebert
3, there are oly 3 o-zero sigular values Source: M.")
44 Factorizig the measuremet matri Sigular value decompositio of D: Sice rak (D)3, there are oly 3 o-zero sigular values Source: M. Hebert

45 Factorizig the measuremet matri Obtaiig a factorizatio from SVD: Motio (cameras) structure What is the issue here? D has rak>3 because of - measuremet oise - affie approimatio

46 Factorizig the measuremet matri Obtaiig a factorizatio from SVD: structure D D

47 Affie ambiguity The decompositio is ot uique. We get the same D by usig ay 3 3 matri C ad applyig the trasformatios M MC, S C - S We ca eforce some Euclidea costraits to resolve this ambiguity (more o et lecture!)
48 Algorithm summary. Give: m images ad features ij 2. For each image i, ceter the feature coordiates 3. Costruct a 2m measuremet matri D: Colum j cotais the projectio of poit j i all views Row i cotais oe coordiate of the projectios of all the poits i image i 4. Factorize D: Compute SVD: D U W V T Create U 3 by takig the first 3 colums of U Create V 3 by takig the first 3 colums of V Create W 3 by takig the upper left 3 3 block of W 5. Create the motio ad shape matrices: M M U 3 ad S W 3 V 3 T (or U 3 W 3½ ad S W 3½ V 3T ) 6. Elimiate affie ambiguity


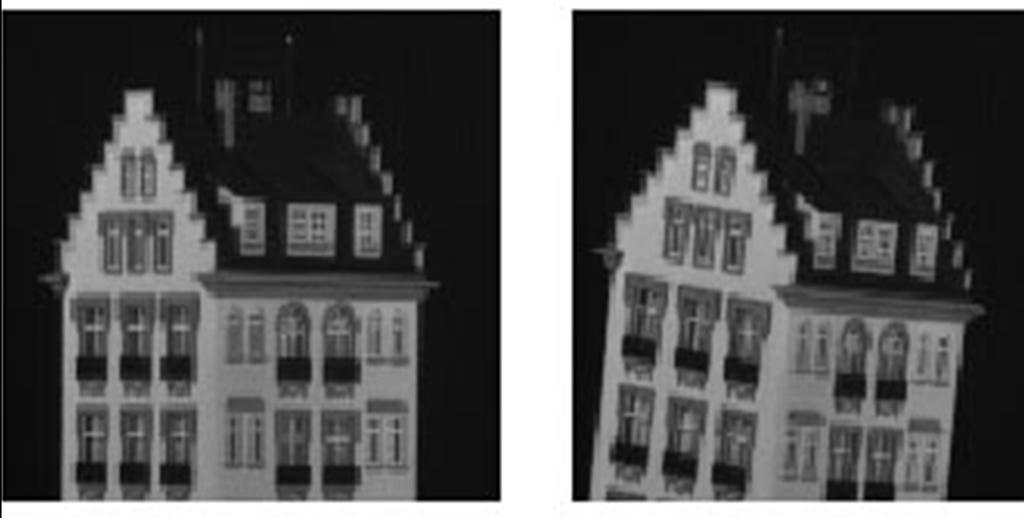
49 Recostructio results C. Tomasi ad T. Kaade. Shape ad motio from image streams uder orthography: A factorizatio method. IJCV, 9(2):37-54, November 992.
50 Net lecture Multiple view geometry Perspective structure from Motio
Affine Structure from Motion
 Affie Structure from Motio EECS 598-8 Fall 24! Foudatios of Computer Visio!! Istructor: Jaso Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f4!! Readigs: FP 8.2! Date: /5/4!! Materials o these slides
Affie Structure from Motio EECS 598-8 Fall 24! Foudatios of Computer Visio!! Istructor: Jaso Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f4!! Readigs: FP 8.2! Date: /5/4!! Materials o these slides
Two or more points can be used to describe a rigid body. This will eliminate the need to define rotational coordinates for the body!
 OINTCOORDINATE FORMULATION Two or more poits ca be used to describe a rigid body. This will elimiate the eed to defie rotatioal coordiates for the body i z r i i, j r j j rimary oits: The coordiates of
OINTCOORDINATE FORMULATION Two or more poits ca be used to describe a rigid body. This will elimiate the eed to defie rotatioal coordiates for the body i z r i i, j r j j rimary oits: The coordiates of
Chimica Inorganica 3
 himica Iorgaica Irreducible Represetatios ad haracter Tables Rather tha usig geometrical operatios, it is ofte much more coveiet to employ a ew set of group elemets which are matrices ad to make the rule
himica Iorgaica Irreducible Represetatios ad haracter Tables Rather tha usig geometrical operatios, it is ofte much more coveiet to employ a ew set of group elemets which are matrices ad to make the rule
STRAIGHT LINES & PLANES
 STRAIGHT LINES & PLANES PARAMETRIC EQUATIONS OF LINES The lie "L" is parallel to the directio vector "v". A fixed poit: "( a, b, c) " o the lie is give. Positio vectors are draw from the origi to the fixed
STRAIGHT LINES & PLANES PARAMETRIC EQUATIONS OF LINES The lie "L" is parallel to the directio vector "v". A fixed poit: "( a, b, c) " o the lie is give. Positio vectors are draw from the origi to the fixed
Machine Learning for Data Science (CS 4786)
") Machie Learig for Data Sciece CS 4786) Lecture & 3: Pricipal Compoet Aalysis The text i black outlies high level ideas. The text i blue provides simple mathematical details to derive or get to the algorithm
Machie Learig for Data Sciece CS 4786) Lecture & 3: Pricipal Compoet Aalysis The text i black outlies high level ideas. The text i blue provides simple mathematical details to derive or get to the algorithm
LECTURE 8: ORTHOGONALITY (CHAPTER 5 IN THE BOOK)
") LECTURE 8: ORTHOGONALITY (CHAPTER 5 IN THE BOOK) Everythig marked by is ot required by the course syllabus I this lecture, all vector spaces is over the real umber R. All vectors i R is viewed as a colum
LECTURE 8: ORTHOGONALITY (CHAPTER 5 IN THE BOOK) Everythig marked by is ot required by the course syllabus I this lecture, all vector spaces is over the real umber R. All vectors i R is viewed as a colum
Notes The Incremental Motion Model:
 The Icremetal Motio Model: The Jacobia Matrix I the forward kiematics model, we saw that it was possible to relate joit agles θ, to the cofiguratio of the robot ed effector T I this sectio, we will see
The Icremetal Motio Model: The Jacobia Matrix I the forward kiematics model, we saw that it was possible to relate joit agles θ, to the cofiguratio of the robot ed effector T I this sectio, we will see
Chapter 1. Complex Numbers. Dr. Pulak Sahoo
 Chapter 1 Complex Numbers BY Dr. Pulak Sahoo Assistat Professor Departmet of Mathematics Uiversity Of Kalyai West Begal, Idia E-mail : sahoopulak1@gmail.com 1 Module-2: Stereographic Projectio 1 Euler
Chapter 1 Complex Numbers BY Dr. Pulak Sahoo Assistat Professor Departmet of Mathematics Uiversity Of Kalyai West Begal, Idia E-mail : sahoopulak1@gmail.com 1 Module-2: Stereographic Projectio 1 Euler
Matrix Algebra from a Statistician s Perspective BIOS 524/ Scalar multiple: ka
 Matrix Algebra from a Statisticia s Perspective BIOS 524/546. Matrices... Basic Termiology a a A = ( aij ) deotes a m matrix of values. Whe =, this is a am a m colum vector. Whe m= this is a row vector..2.
Matrix Algebra from a Statisticia s Perspective BIOS 524/546. Matrices... Basic Termiology a a A = ( aij ) deotes a m matrix of values. Whe =, this is a am a m colum vector. Whe m= this is a row vector..2.
18.01 Calculus Jason Starr Fall 2005
 Lecture 18. October 5, 005 Homework. Problem Set 5 Part I: (c). Practice Problems. Course Reader: 3G 1, 3G, 3G 4, 3G 5. 1. Approximatig Riema itegrals. Ofte, there is o simpler expressio for the atiderivative
Lecture 18. October 5, 005 Homework. Problem Set 5 Part I: (c). Practice Problems. Course Reader: 3G 1, 3G, 3G 4, 3G 5. 1. Approximatig Riema itegrals. Ofte, there is o simpler expressio for the atiderivative
Section 14. Simple linear regression.
 Sectio 14 Simple liear regressio. Let us look at the cigarette dataset from [1] (available to dowload from joural s website) ad []. The cigarette dataset cotais measuremets of tar, icotie, weight ad carbo
Sectio 14 Simple liear regressio. Let us look at the cigarette dataset from [1] (available to dowload from joural s website) ad []. The cigarette dataset cotais measuremets of tar, icotie, weight ad carbo
R is a scalar defined as follows:
 Math 8. Notes o Dot Product, Cross Product, Plaes, Area, ad Volumes This lecture focuses primarily o the dot product ad its may applicatios, especially i the measuremet of agles ad scalar projectio ad
Math 8. Notes o Dot Product, Cross Product, Plaes, Area, ad Volumes This lecture focuses primarily o the dot product ad its may applicatios, especially i the measuremet of agles ad scalar projectio ad
Math 21C Brian Osserman Practice Exam 2
 Math 1C Bria Osserma Practice Exam 1 (15 pts.) Determie the radius ad iterval of covergece of the power series (x ) +1. First we use the root test to determie for which values of x the series coverges
Math 1C Bria Osserma Practice Exam 1 (15 pts.) Determie the radius ad iterval of covergece of the power series (x ) +1. First we use the root test to determie for which values of x the series coverges
Bivariate Sample Statistics Geog 210C Introduction to Spatial Data Analysis. Chris Funk. Lecture 7
 Bivariate Sample Statistics Geog 210C Itroductio to Spatial Data Aalysis Chris Fuk Lecture 7 Overview Real statistical applicatio: Remote moitorig of east Africa log rais Lead up to Lab 5-6 Review of bivariate/multivariate
Bivariate Sample Statistics Geog 210C Itroductio to Spatial Data Aalysis Chris Fuk Lecture 7 Overview Real statistical applicatio: Remote moitorig of east Africa log rais Lead up to Lab 5-6 Review of bivariate/multivariate
Apply change-of-basis formula to rewrite x as a linear combination of eigenvectors v j.
 Eigevalue-Eigevector Istructor: Nam Su Wag eigemcd Ay vector i real Euclidea space of dimesio ca be uiquely epressed as a liear combiatio of liearly idepedet vectors (ie, basis) g j, j,,, α g α g α g α
Eigevalue-Eigevector Istructor: Nam Su Wag eigemcd Ay vector i real Euclidea space of dimesio ca be uiquely epressed as a liear combiatio of liearly idepedet vectors (ie, basis) g j, j,,, α g α g α g α
Frequency Domain Filtering
 Frequecy Domai Filterig Raga Rodrigo October 19, 2010 Outlie Cotets 1 Itroductio 1 2 Fourier Represetatio of Fiite-Duratio Sequeces: The Discrete Fourier Trasform 1 3 The 2-D Discrete Fourier Trasform
Frequecy Domai Filterig Raga Rodrigo October 19, 2010 Outlie Cotets 1 Itroductio 1 2 Fourier Represetatio of Fiite-Duratio Sequeces: The Discrete Fourier Trasform 1 3 The 2-D Discrete Fourier Trasform
Generalized Principal Component Analysis (GPCA)
") Geeralized Pricipal Compoet Aalysis (GPCA) Reé Vidal Yi Ma Shakar Sastry Departmet of EECS, Uiversity of Califoria, Berkeley, CA 94720 ECE Departmet, Uiversity of Illiois, Urbaa, IL 61801 Abstract We propose
Geeralized Pricipal Compoet Aalysis (GPCA) Reé Vidal Yi Ma Shakar Sastry Departmet of EECS, Uiversity of Califoria, Berkeley, CA 94720 ECE Departmet, Uiversity of Illiois, Urbaa, IL 61801 Abstract We propose
AH Checklist (Unit 3) AH Checklist (Unit 3) Matrices
 AH Checklist (Unit 3) Matrices") AH Checklist (Uit 3) AH Checklist (Uit 3) Matrices Skill Achieved? Kow that a matrix is a rectagular array of umbers (aka etries or elemets) i paretheses, each etry beig i a particular row ad colum Kow
AH Checklist (Uit 3) AH Checklist (Uit 3) Matrices Skill Achieved? Kow that a matrix is a rectagular array of umbers (aka etries or elemets) i paretheses, each etry beig i a particular row ad colum Kow
Singular value decomposition. Mathématiques appliquées (MATH0504-1) B. Dewals, Ch. Geuzaine
 B. Dewals, Ch. Geuzaine") Lecture 11 Sigular value decompositio Mathématiques appliquées (MATH0504-1) B. Dewals, Ch. Geuzaie V1.2 07/12/2018 1 Sigular value decompositio (SVD) at a glace Motivatio: the image of the uit sphere S
Lecture 11 Sigular value decompositio Mathématiques appliquées (MATH0504-1) B. Dewals, Ch. Geuzaie V1.2 07/12/2018 1 Sigular value decompositio (SVD) at a glace Motivatio: the image of the uit sphere S
A widely used display of protein shapes is based on the coordinates of the alpha carbons - - C α
 Nice plottig of proteis: I A widely used display of protei shapes is based o the coordiates of the alpha carbos - - C α -s. The coordiates of the C α -s are coected by a cotiuous curve that roughly follows
Nice plottig of proteis: I A widely used display of protei shapes is based o the coordiates of the alpha carbos - - C α -s. The coordiates of the C α -s are coected by a cotiuous curve that roughly follows
8. Applications To Linear Differential Equations
 8. Applicatios To Liear Differetial Equatios 8.. Itroductio 8.. Review Of Results Cocerig Liear Differetial Equatios Of First Ad Secod Orders 8.3. Eercises 8.4. Liear Differetial Equatios Of Order N 8.5.
8. Applicatios To Liear Differetial Equatios 8.. Itroductio 8.. Review Of Results Cocerig Liear Differetial Equatios Of First Ad Secod Orders 8.3. Eercises 8.4. Liear Differetial Equatios Of Order N 8.5.
Lecture 8: October 20, Applications of SVD: least squares approximation
 Mathematical Toolkit Autum 2016 Lecturer: Madhur Tulsiai Lecture 8: October 20, 2016 1 Applicatios of SVD: least squares approximatio We discuss aother applicatio of sigular value decompositio (SVD) of
Mathematical Toolkit Autum 2016 Lecturer: Madhur Tulsiai Lecture 8: October 20, 2016 1 Applicatios of SVD: least squares approximatio We discuss aother applicatio of sigular value decompositio (SVD) of
U8L1: Sec Equations of Lines in R 2
 MCVU U8L: Sec. 8.9. Equatios of Lies i R Review of Equatios of a Straight Lie (-D) Cosider the lie passig through A (-,) with slope, as show i the diagram below. I poit slope form, the equatio of the lie
MCVU U8L: Sec. 8.9. Equatios of Lies i R Review of Equatios of a Straight Lie (-D) Cosider the lie passig through A (-,) with slope, as show i the diagram below. I poit slope form, the equatio of the lie
5.1 Review of Singular Value Decomposition (SVD)
") MGMT 69000: Topics i High-dimesioal Data Aalysis Falll 06 Lecture 5: Spectral Clusterig: Overview (cotd) ad Aalysis Lecturer: Jiamig Xu Scribe: Adarsh Barik, Taotao He, September 3, 06 Outlie Review of
MGMT 69000: Topics i High-dimesioal Data Aalysis Falll 06 Lecture 5: Spectral Clusterig: Overview (cotd) ad Aalysis Lecturer: Jiamig Xu Scribe: Adarsh Barik, Taotao He, September 3, 06 Outlie Review of
Properties and Tests of Zeros of Polynomial Functions
 Properties ad Tests of Zeros of Polyomial Fuctios The Remaider ad Factor Theorems: Sythetic divisio ca be used to fid the values of polyomials i a sometimes easier way tha substitutio. This is show by
Properties ad Tests of Zeros of Polyomial Fuctios The Remaider ad Factor Theorems: Sythetic divisio ca be used to fid the values of polyomials i a sometimes easier way tha substitutio. This is show by
U8L1: Sec Equations of Lines in R 2
 MCVU Thursda Ma, Review of Equatios of a Straight Lie (-D) U8L Sec. 8.9. Equatios of Lies i R Cosider the lie passig through A (-,) with slope, as show i the diagram below. I poit slope form, the equatio
MCVU Thursda Ma, Review of Equatios of a Straight Lie (-D) U8L Sec. 8.9. Equatios of Lies i R Cosider the lie passig through A (-,) with slope, as show i the diagram below. I poit slope form, the equatio
24 MATH 101B: ALGEBRA II, PART D: REPRESENTATIONS OF GROUPS
 24 MATH 101B: ALGEBRA II, PART D: REPRESENTATIONS OF GROUPS Corollary 2.30. Suppose that the semisimple decompositio of the G- module V is V = i S i. The i = χ V,χ i Proof. Sice χ V W = χ V + χ W, we have:
24 MATH 101B: ALGEBRA II, PART D: REPRESENTATIONS OF GROUPS Corollary 2.30. Suppose that the semisimple decompositio of the G- module V is V = i S i. The i = χ V,χ i Proof. Sice χ V W = χ V + χ W, we have:
Ma 530 Introduction to Power Series
 Ma 530 Itroductio to Power Series Please ote that there is material o power series at Visual Calculus. Some of this material was used as part of the presetatio of the topics that follow. What is a Power
Ma 530 Itroductio to Power Series Please ote that there is material o power series at Visual Calculus. Some of this material was used as part of the presetatio of the topics that follow. What is a Power
Cov(aX, cy ) Var(X) Var(Y ) It is completely invariant to affine transformations: for any a, b, c, d R, ρ(ax + b, cy + d) = a.s. X i. as n.
 Var(X) Var(Y ) It is completely invariant to affine transformations: for any a, b, c, d R, ρ(ax + b, cy + d) = a.s. X i. as n.") CS 189 Itroductio to Machie Learig Sprig 218 Note 11 1 Caoical Correlatio Aalysis The Pearso Correlatio Coefficiet ρ(x, Y ) is a way to measure how liearly related (i other words, how well a liear model
CS 189 Itroductio to Machie Learig Sprig 218 Note 11 1 Caoical Correlatio Aalysis The Pearso Correlatio Coefficiet ρ(x, Y ) is a way to measure how liearly related (i other words, how well a liear model
Complex Analysis Spring 2001 Homework I Solution
 Complex Aalysis Sprig 2001 Homework I Solutio 1. Coway, Chapter 1, sectio 3, problem 3. Describe the set of poits satisfyig the equatio z a z + a = 2c, where c > 0 ad a R. To begi, we see from the triagle
Complex Aalysis Sprig 2001 Homework I Solutio 1. Coway, Chapter 1, sectio 3, problem 3. Describe the set of poits satisfyig the equatio z a z + a = 2c, where c > 0 ad a R. To begi, we see from the triagle
Algebra of Least Squares
 October 19, 2018 Algebra of Least Squares Geometry of Least Squares Recall that out data is like a table [Y X] where Y collects observatios o the depedet variable Y ad X collects observatios o the k-dimesioal
October 19, 2018 Algebra of Least Squares Geometry of Least Squares Recall that out data is like a table [Y X] where Y collects observatios o the depedet variable Y ad X collects observatios o the k-dimesioal
Centers of a Simplex. Contents
 Ceters of a Simplex David Eberly, Geometric Tools, Redmod WA 9852 https://www.geometrictools.com/ This work is licesed uder the Creative Commos Attributio 4. Iteratioal Licese. To view a copy of this licese,
Ceters of a Simplex David Eberly, Geometric Tools, Redmod WA 9852 https://www.geometrictools.com/ This work is licesed uder the Creative Commos Attributio 4. Iteratioal Licese. To view a copy of this licese,
JEE(Advanced) 2018 TEST PAPER WITH SOLUTION (HELD ON SUNDAY 20 th MAY, 2018)
 2018 TEST PAPER WITH SOLUTION (HELD ON SUNDAY 20 th MAY, 2018)") JEE(Advaced) 08 TEST PAPER WITH SOLUTION (HELD ON SUNDAY 0 th MAY, 08) PART- : JEE(Advaced) 08/Paper- SECTION. For ay positive iteger, defie ƒ : (0, ) as ƒ () j ta j j for all (0, ). (Here, the iverse
JEE(Advaced) 08 TEST PAPER WITH SOLUTION (HELD ON SUNDAY 0 th MAY, 08) PART- : JEE(Advaced) 08/Paper- SECTION. For ay positive iteger, defie ƒ : (0, ) as ƒ () j ta j j for all (0, ). (Here, the iverse
The Basic Space Model
 The Basic Space Model Let x i be the ith idividual s (i=,, ) reported positio o the th issue ( =,, m) ad let X 0 be the by m matrix of observed data here the 0 subscript idicates that elemets are missig
The Basic Space Model Let x i be the ith idividual s (i=,, ) reported positio o the th issue ( =,, m) ad let X 0 be the by m matrix of observed data here the 0 subscript idicates that elemets are missig
Ma 530 Infinite Series I
 Ma 50 Ifiite Series I Please ote that i additio to the material below this lecture icorporated material from the Visual Calculus web site. The material o sequeces is at Visual Sequeces. (To use this li
Ma 50 Ifiite Series I Please ote that i additio to the material below this lecture icorporated material from the Visual Calculus web site. The material o sequeces is at Visual Sequeces. (To use this li
Matrix Algebra 2.3 CHARACTERIZATIONS OF INVERTIBLE MATRICES Pearson Education, Inc.
 2 Matrix Algebra 2.3 CHARACTERIZATIONS OF INVERTIBLE MATRICES 2012 Pearso Educatio, Ic. Theorem 8: Let A be a square matrix. The the followig statemets are equivalet. That is, for a give A, the statemets
2 Matrix Algebra 2.3 CHARACTERIZATIONS OF INVERTIBLE MATRICES 2012 Pearso Educatio, Ic. Theorem 8: Let A be a square matrix. The the followig statemets are equivalet. That is, for a give A, the statemets
[412] A TEST FOR HOMOGENEITY OF THE MARGINAL DISTRIBUTIONS IN A TWO-WAY CLASSIFICATION
![[412] A TEST FOR HOMOGENEITY OF THE MARGINAL DISTRIBUTIONS IN A TWO-WAY CLASSIFICATION](/thumbs/90/103300145.jpg "[412] A TEST FOR HOMOGENEITY OF THE MARGINAL DISTRIBUTIONS IN A TWO-WAY CLASSIFICATION") [412] A TEST FOR HOMOGENEITY OF THE MARGINAL DISTRIBUTIONS IN A TWO-WAY CLASSIFICATION BY ALAN STUART Divisio of Research Techiques, Lodo School of Ecoomics 1. INTRODUCTION There are several circumstaces
[412] A TEST FOR HOMOGENEITY OF THE MARGINAL DISTRIBUTIONS IN A TWO-WAY CLASSIFICATION BY ALAN STUART Divisio of Research Techiques, Lodo School of Ecoomics 1. INTRODUCTION There are several circumstaces
CS 112 Transformations II. Slide 1
 CS 112 Trasformatios II Slide 1 Compositio of Trasformatios Example: A poit P is first traslated ad the rotated. Traslatio matrix T, Rotatio Matrix R. After Traslatio: P = TP After Rotatio: P =RP =RTP
CS 112 Trasformatios II Slide 1 Compositio of Trasformatios Example: A poit P is first traslated ad the rotated. Traslatio matrix T, Rotatio Matrix R. After Traslatio: P = TP After Rotatio: P =RP =RTP
The Method of Least Squares. To understand least squares fitting of data.
 The Method of Least Squares KEY WORDS Curve fittig, least square GOAL To uderstad least squares fittig of data To uderstad the least squares solutio of icosistet systems of liear equatios 1 Motivatio Curve
The Method of Least Squares KEY WORDS Curve fittig, least square GOAL To uderstad least squares fittig of data To uderstad the least squares solutio of icosistet systems of liear equatios 1 Motivatio Curve
The Pendulum. Purpose
 The Pedulum Purpose To carry out a example illustratig how physics approaches ad solves problems. The example used here is to explore the differet factors that determie the period of motio of a pedulum.
The Pedulum Purpose To carry out a example illustratig how physics approaches ad solves problems. The example used here is to explore the differet factors that determie the period of motio of a pedulum.
Chapter 2. Periodic points of toral. automorphisms. 2.1 General introduction
 Chapter 2 Periodic poits of toral automorphisms 2.1 Geeral itroductio The automorphisms of the two-dimesioal torus are rich mathematical objects possessig iterestig geometric, algebraic, topological ad
Chapter 2 Periodic poits of toral automorphisms 2.1 Geeral itroductio The automorphisms of the two-dimesioal torus are rich mathematical objects possessig iterestig geometric, algebraic, topological ad
CALCULUS BASIC SUMMER REVIEW
 CALCULUS BASIC SUMMER REVIEW NAME rise y y y Slope of a o vertical lie: m ru Poit Slope Equatio: y y m( ) The slope is m ad a poit o your lie is, ). ( y Slope-Itercept Equatio: y m b slope= m y-itercept=
CALCULUS BASIC SUMMER REVIEW NAME rise y y y Slope of a o vertical lie: m ru Poit Slope Equatio: y y m( ) The slope is m ad a poit o your lie is, ). ( y Slope-Itercept Equatio: y m b slope= m y-itercept=
Linear regression. Daniel Hsu (COMS 4771) (y i x T i β)2 2πσ. 2 2σ 2. 1 n. (x T i β y i ) 2. 1 ˆβ arg min. β R n d
 (y i x T i β)2 2πσ. 2 2σ 2. 1 n. (x T i β y i ) 2. 1 ˆβ arg min. β R n d") Liear regressio Daiel Hsu (COMS 477) Maximum likelihood estimatio Oe of the simplest liear regressio models is the followig: (X, Y ),..., (X, Y ), (X, Y ) are iid radom pairs takig values i R d R, ad Y
Liear regressio Daiel Hsu (COMS 477) Maximum likelihood estimatio Oe of the simplest liear regressio models is the followig: (X, Y ),..., (X, Y ), (X, Y ) are iid radom pairs takig values i R d R, ad Y
Geometry of LS. LECTURE 3 GEOMETRY OF LS, PROPERTIES OF σ 2, PARTITIONED REGRESSION, GOODNESS OF FIT
 OCTOBER 7, 2016 LECTURE 3 GEOMETRY OF LS, PROPERTIES OF σ 2, PARTITIONED REGRESSION, GOODNESS OF FIT Geometry of LS We ca thik of y ad the colums of X as members of the -dimesioal Euclidea space R Oe ca
OCTOBER 7, 2016 LECTURE 3 GEOMETRY OF LS, PROPERTIES OF σ 2, PARTITIONED REGRESSION, GOODNESS OF FIT Geometry of LS We ca thik of y ad the colums of X as members of the -dimesioal Euclidea space R Oe ca
Machine Learning for Data Science (CS4786) Lecture 4
 Lecture 4") Machie Learig for Data Sciece (CS4786) Lecture 4 Caoical Correlatio Aalysis (CCA) Course Webpage : http://www.cs.corell.edu/courses/cs4786/2016fa/ Aoucemet We are gradig HW0 ad you will be added to cms
Machie Learig for Data Sciece (CS4786) Lecture 4 Caoical Correlatio Aalysis (CCA) Course Webpage : http://www.cs.corell.edu/courses/cs4786/2016fa/ Aoucemet We are gradig HW0 ad you will be added to cms
α x = α x for all scalars α
 SECION. VECOR ND RIX NORS VECOR NOR: a fuctio from R oegatie real umbers that measures the "size" of a ector. Properties that defie a ector orm: (i) If 0, the > 0 (ii) (iii) α α for all scalars α Note:
SECION. VECOR ND RIX NORS VECOR NOR: a fuctio from R oegatie real umbers that measures the "size" of a ector. Properties that defie a ector orm: (i) If 0, the > 0 (ii) (iii) α α for all scalars α Note:
Mathematical Foundations -1- Sets and Sequences. Sets and Sequences
 Mathematical Foudatios -1- Sets ad Sequeces Sets ad Sequeces Methods of proof 2 Sets ad vectors 13 Plaes ad hyperplaes 18 Liearly idepedet vectors, vector spaces 2 Covex combiatios of vectors 21 eighborhoods,
Mathematical Foudatios -1- Sets ad Sequeces Sets ad Sequeces Methods of proof 2 Sets ad vectors 13 Plaes ad hyperplaes 18 Liearly idepedet vectors, vector spaces 2 Covex combiatios of vectors 21 eighborhoods,
SAFE HANDS & IIT-ian's PACE EDT-10 (JEE) SOLUTIONS
 SOLUTIONS") . If their mea positios coicide with each other, maimum separatio will be A. Now from phasor diagram, we ca clearly see the phase differece. SAFE HANDS & IIT-ia's PACE ad Aswer : Optio (4) 5. Aswer : Optio
. If their mea positios coicide with each other, maimum separatio will be A. Now from phasor diagram, we ca clearly see the phase differece. SAFE HANDS & IIT-ia's PACE ad Aswer : Optio (4) 5. Aswer : Optio
Ellipsoid Method for Linear Programming made simple
 Ellipsoid Method for Liear Programmig made simple Sajeev Saxea Dept. of Computer Sciece ad Egieerig, Idia Istitute of Techology, Kapur, INDIA-08 06 December 3, 07 Abstract I this paper, ellipsoid method
Ellipsoid Method for Liear Programmig made simple Sajeev Saxea Dept. of Computer Sciece ad Egieerig, Idia Istitute of Techology, Kapur, INDIA-08 06 December 3, 07 Abstract I this paper, ellipsoid method
Inverse Matrix. A meaning that matrix B is an inverse of matrix A.
 Iverse Matrix Two square matrices A ad B of dimesios are called iverses to oe aother if the followig holds, AB BA I (11) The otio is dual but we ofte write 1 B A meaig that matrix B is a iverse of matrix
Iverse Matrix Two square matrices A ad B of dimesios are called iverses to oe aother if the followig holds, AB BA I (11) The otio is dual but we ofte write 1 B A meaig that matrix B is a iverse of matrix
Homework 1 Solutions. The exercises are from Foundations of Mathematical Analysis by Richard Johnsonbaugh and W.E. Pfaffenberger.
 Homewor 1 Solutios Math 171, Sprig 2010 Hery Adams The exercises are from Foudatios of Mathematical Aalysis by Richard Johsobaugh ad W.E. Pfaffeberger. 2.2. Let h : X Y, g : Y Z, ad f : Z W. Prove that
Homewor 1 Solutios Math 171, Sprig 2010 Hery Adams The exercises are from Foudatios of Mathematical Aalysis by Richard Johsobaugh ad W.E. Pfaffeberger. 2.2. Let h : X Y, g : Y Z, ad f : Z W. Prove that
15.083J/6.859J Integer Optimization. Lecture 3: Methods to enhance formulations
 15.083J/6.859J Iteger Optimizatio Lecture 3: Methods to ehace formulatios 1 Outlie Polyhedral review Slide 1 Methods to geerate valid iequalities Methods to geerate facet defiig iequalities Polyhedral
15.083J/6.859J Iteger Optimizatio Lecture 3: Methods to ehace formulatios 1 Outlie Polyhedral review Slide 1 Methods to geerate valid iequalities Methods to geerate facet defiig iequalities Polyhedral
Lecture #20. n ( x p i )1/p = max
1/p = max") COMPSCI 632: Approximatio Algorithms November 8, 2017 Lecturer: Debmalya Paigrahi Lecture #20 Scribe: Yua Deg 1 Overview Today, we cotiue to discuss about metric embeddigs techique. Specifically, we apply
COMPSCI 632: Approximatio Algorithms November 8, 2017 Lecturer: Debmalya Paigrahi Lecture #20 Scribe: Yua Deg 1 Overview Today, we cotiue to discuss about metric embeddigs techique. Specifically, we apply
Regn. No. North Delhi : 33-35, Mall Road, G.T.B. Nagar (Opp. Metro Gate No. 3), Delhi-09, Ph: ,
, Delhi-09, Ph: ,") . Sectio-A cotais 30 Multiple Choice Questios (MCQ). Each questio has 4 choices (a), (b), (c) ad (d), for its aswer, out of which ONLY ONE is correct. From Q. to Q.0 carries Marks ad Q. to Q.30 carries
. Sectio-A cotais 30 Multiple Choice Questios (MCQ). Each questio has 4 choices (a), (b), (c) ad (d), for its aswer, out of which ONLY ONE is correct. From Q. to Q.0 carries Marks ad Q. to Q.30 carries
IIT JAM Mathematical Statistics (MS) 2006 SECTION A
 2006 SECTION A") IIT JAM Mathematical Statistics (MS) 6 SECTION A. If a > for ad lim a / L >, the which of the followig series is ot coverget? (a) (b) (c) (d) (d) = = a = a = a a + / a lim a a / + = lim a / a / + = lim
IIT JAM Mathematical Statistics (MS) 6 SECTION A. If a > for ad lim a / L >, the which of the followig series is ot coverget? (a) (b) (c) (d) (d) = = a = a = a a + / a lim a a / + = lim a / a / + = lim
Chapter 6 Principles of Data Reduction
 Chapter 6 for BST 695: Special Topics i Statistical Theory. Kui Zhag, 0 Chapter 6 Priciples of Data Reductio Sectio 6. Itroductio Goal: To summarize or reduce the data X, X,, X to get iformatio about a
Chapter 6 for BST 695: Special Topics i Statistical Theory. Kui Zhag, 0 Chapter 6 Priciples of Data Reductio Sectio 6. Itroductio Goal: To summarize or reduce the data X, X,, X to get iformatio about a
Signal Processing in Mechatronics
 Sigal Processig i Mechatroics Zhu K.P. AIS, UM. Lecture, Brief itroductio to Sigals ad Systems, Review of Liear Algebra ad Sigal Processig Related Mathematics . Brief Itroductio to Sigals What is sigal
Sigal Processig i Mechatroics Zhu K.P. AIS, UM. Lecture, Brief itroductio to Sigals ad Systems, Review of Liear Algebra ad Sigal Processig Related Mathematics . Brief Itroductio to Sigals What is sigal
(VII.A) Review of Orthogonality
 Review of Orthogonality") VII.A Review of Orthogoality At the begiig of our study of liear trasformatios i we briefly discussed projectios, rotatios ad projectios. I III.A, projectios were treated i the abstract ad without regard
VII.A Review of Orthogoality At the begiig of our study of liear trasformatios i we briefly discussed projectios, rotatios ad projectios. I III.A, projectios were treated i the abstract ad without regard
2) 3 π. EAMCET Maths Practice Questions Examples with hints and short cuts from few important chapters
 3 π. EAMCET Maths Practice Questions Examples with hints and short cuts from few important chapters") EAMCET Maths Practice Questios Examples with hits ad short cuts from few importat chapters. If the vectors pi j + 5k, i qj + 5k are colliear the (p,q) ) 0 ) 3) 4) Hit : p 5 p, q q 5.If the vectors i j
EAMCET Maths Practice Questios Examples with hits ad short cuts from few importat chapters. If the vectors pi j + 5k, i qj + 5k are colliear the (p,q) ) 0 ) 3) 4) Hit : p 5 p, q q 5.If the vectors i j
Machine Learning for Data Science (CS 4786)
") Machie Learig for Data Sciece CS 4786) Lecture 9: Pricipal Compoet Aalysis The text i black outlies mai ideas to retai from the lecture. The text i blue give a deeper uderstadig of how we derive or get
Machie Learig for Data Sciece CS 4786) Lecture 9: Pricipal Compoet Aalysis The text i black outlies mai ideas to retai from the lecture. The text i blue give a deeper uderstadig of how we derive or get
Zeros of Polynomials
 Math 160 www.timetodare.com 4.5 4.6 Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered with fidig the solutios of polyomial equatios of ay degree
Math 160 www.timetodare.com 4.5 4.6 Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered with fidig the solutios of polyomial equatios of ay degree
Math 451: Euclidean and Non-Euclidean Geometry MWF 3pm, Gasson 204 Homework 3 Solutions
 Math 451: Euclidea ad No-Euclidea Geometry MWF 3pm, Gasso 204 Homework 3 Solutios Exercises from 1.4 ad 1.5 of the otes: 4.3, 4.10, 4.12, 4.14, 4.15, 5.3, 5.4, 5.5 Exercise 4.3. Explai why Hp, q) = {x
Math 451: Euclidea ad No-Euclidea Geometry MWF 3pm, Gasso 204 Homework 3 Solutios Exercises from 1.4 ad 1.5 of the otes: 4.3, 4.10, 4.12, 4.14, 4.15, 5.3, 5.4, 5.5 Exercise 4.3. Explai why Hp, q) = {x
NBHM QUESTION 2007 Section 1 : Algebra Q1. Let G be a group of order n. Which of the following conditions imply that G is abelian?
 NBHM QUESTION 7 NBHM QUESTION 7 NBHM QUESTION 7 Sectio : Algebra Q Let G be a group of order Which of the followig coditios imply that G is abelia? 5 36 Q Which of the followig subgroups are ecesarily
NBHM QUESTION 7 NBHM QUESTION 7 NBHM QUESTION 7 Sectio : Algebra Q Let G be a group of order Which of the followig coditios imply that G is abelia? 5 36 Q Which of the followig subgroups are ecesarily
f(w) w z =R z a 0 a n a nz n Liouville s theorem, we see that Q is constant, which implies that P is constant, which is a contradiction.
 w z =R z a 0 a n a nz n Liouville s theorem, we see that Q is constant, which implies that P is constant, which is a contradiction.") Theorem 3.6.4. [Liouville s Theorem] Every bouded etire fuctio is costat. Proof. Let f be a etire fuctio. Suppose that there is M R such that M for ay z C. The for ay z C ad R > 0 f (z) f(w) 2πi (w z)
Theorem 3.6.4. [Liouville s Theorem] Every bouded etire fuctio is costat. Proof. Let f be a etire fuctio. Suppose that there is M R such that M for ay z C. The for ay z C ad R > 0 f (z) f(w) 2πi (w z)
3.2 Properties of Division 3.3 Zeros of Polynomials 3.4 Complex and Rational Zeros of Polynomials
 Math 60 www.timetodare.com 3. Properties of Divisio 3.3 Zeros of Polyomials 3.4 Complex ad Ratioal Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered
Math 60 www.timetodare.com 3. Properties of Divisio 3.3 Zeros of Polyomials 3.4 Complex ad Ratioal Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered
 + {JEE Advace 03} Sept 0 Name: Batch (Day) Phoe No. IT IS NOT ENOUGH TO HAVE A GOOD MIND, THE MAIN THING IS TO USE IT WELL Marks: 00. If A (α, β) = (a) A( α, β) = A( α, β) (c) Adj (A ( α, β)) = Sol : We
+ {JEE Advace 03} Sept 0 Name: Batch (Day) Phoe No. IT IS NOT ENOUGH TO HAVE A GOOD MIND, THE MAIN THING IS TO USE IT WELL Marks: 00. If A (α, β) = (a) A( α, β) = A( α, β) (c) Adj (A ( α, β)) = Sol : We
MATH 205 HOMEWORK #2 OFFICIAL SOLUTION. (f + g)(x) = f(x) + g(x) = f( x) g( x) = (f + g)( x)
(x) = f(x) + g(x) = f( x) g( x) = (f + g)( x)") MATH 205 HOMEWORK #2 OFFICIAL SOLUTION Problem 2: Do problems 7-9 o page 40 of Hoffma & Kuze. (7) We will prove this by cotradictio. Suppose that W 1 is ot cotaied i W 2 ad W 2 is ot cotaied i W 1. The
MATH 205 HOMEWORK #2 OFFICIAL SOLUTION Problem 2: Do problems 7-9 o page 40 of Hoffma & Kuze. (7) We will prove this by cotradictio. Suppose that W 1 is ot cotaied i W 2 ad W 2 is ot cotaied i W 1. The
How to Maximize a Function without Really Trying
 How to Maximize a Fuctio without Really Tryig MARK FLANAGAN School of Electrical, Electroic ad Commuicatios Egieerig Uiversity College Dubli We will prove a famous elemetary iequality called The Rearragemet
How to Maximize a Fuctio without Really Tryig MARK FLANAGAN School of Electrical, Electroic ad Commuicatios Egieerig Uiversity College Dubli We will prove a famous elemetary iequality called The Rearragemet
Chapter 4. Fourier Series
 Chapter 4. Fourier Series At this poit we are ready to ow cosider the caoical equatios. Cosider, for eample the heat equatio u t = u, < (4.) subject to u(, ) = si, u(, t) = u(, t) =. (4.) Here,
Chapter 4. Fourier Series At this poit we are ready to ow cosider the caoical equatios. Cosider, for eample the heat equatio u t = u, < (4.) subject to u(, ) = si, u(, t) = u(, t) =. (4.) Here,
Definitions and Theorems. where x are the decision variables. c, b, and a are constant coefficients.
 Defiitios ad Theorems Remember the scalar form of the liear programmig problem, Miimize, Subject to, f(x) = c i x i a 1i x i = b 1 a mi x i = b m x i 0 i = 1,2,, where x are the decisio variables. c, b,
Defiitios ad Theorems Remember the scalar form of the liear programmig problem, Miimize, Subject to, f(x) = c i x i a 1i x i = b 1 a mi x i = b m x i 0 i = 1,2,, where x are the decisio variables. c, b,
Optimization Methods MIT 2.098/6.255/ Final exam
 Optimizatio Methods MIT 2.098/6.255/15.093 Fial exam Date Give: December 19th, 2006 P1. [30 pts] Classify the followig statemets as true or false. All aswers must be well-justified, either through a short
Optimizatio Methods MIT 2.098/6.255/15.093 Fial exam Date Give: December 19th, 2006 P1. [30 pts] Classify the followig statemets as true or false. All aswers must be well-justified, either through a short
Image Spaces. What might an image space be
 Image Spaces What might a image space be Map each image to a poit i a space Defie a distace betwee two poits i that space Mabe also a shortest path (morph) We have alread see a simple versio of this, i
Image Spaces What might a image space be Map each image to a poit i a space Defie a distace betwee two poits i that space Mabe also a shortest path (morph) We have alread see a simple versio of this, i
ANALYSIS OF EXPERIMENTAL ERRORS
 ANALYSIS OF EXPERIMENTAL ERRORS All physical measuremets ecoutered i the verificatio of physics theories ad cocepts are subject to ucertaities that deped o the measurig istrumets used ad the coditios uder
ANALYSIS OF EXPERIMENTAL ERRORS All physical measuremets ecoutered i the verificatio of physics theories ad cocepts are subject to ucertaities that deped o the measurig istrumets used ad the coditios uder
M 340L CS Homew ork Set 6 Solutions
 1. Suppose P is ivertible ad M 34L CS Homew ork Set 6 Solutios A PBP 1. Solve for B i terms of P ad A. Sice A PBP 1, w e have 1 1 1 B P PBP P P AP ( ).. Suppose ( B C) D, w here B ad C are m matrices ad
1. Suppose P is ivertible ad M 34L CS Homew ork Set 6 Solutios A PBP 1. Solve for B i terms of P ad A. Sice A PBP 1, w e have 1 1 1 B P PBP P P AP ( ).. Suppose ( B C) D, w here B ad C are m matrices ad
M 340L CS Homew ork Set 6 Solutions
 . Suppose P is ivertible ad M 4L CS Homew ork Set 6 Solutios A PBP. Solve for B i terms of P ad A. Sice A PBP, w e have B P PBP P P AP ( ).. Suppose ( B C) D, w here B ad C are m matrices ad D is ivertible.
. Suppose P is ivertible ad M 4L CS Homew ork Set 6 Solutios A PBP. Solve for B i terms of P ad A. Sice A PBP, w e have B P PBP P P AP ( ).. Suppose ( B C) D, w here B ad C are m matrices ad D is ivertible.
CHAPTER 5. Theory and Solution Using Matrix Techniques
 A SERIES OF CLASS NOTES FOR 2005-2006 TO INTRODUCE LINEAR AND NONLINEAR PROBLEMS TO ENGINEERS, SCIENTISTS, AND APPLIED MATHEMATICIANS DE CLASS NOTES 3 A COLLECTION OF HANDOUTS ON SYSTEMS OF ORDINARY DIFFERENTIAL
A SERIES OF CLASS NOTES FOR 2005-2006 TO INTRODUCE LINEAR AND NONLINEAR PROBLEMS TO ENGINEERS, SCIENTISTS, AND APPLIED MATHEMATICIANS DE CLASS NOTES 3 A COLLECTION OF HANDOUTS ON SYSTEMS OF ORDINARY DIFFERENTIAL
Matrix Algebra 2.2 THE INVERSE OF A MATRIX Pearson Education, Inc.
 2 Matrix Algebra 2.2 THE INVERSE OF A MATRIX MATRIX OPERATIONS A matrix A is said to be ivertible if there is a matrix C such that CA = I ad AC = I where, the idetity matrix. I = I I this case, C is a
2 Matrix Algebra 2.2 THE INVERSE OF A MATRIX MATRIX OPERATIONS A matrix A is said to be ivertible if there is a matrix C such that CA = I ad AC = I where, the idetity matrix. I = I I this case, C is a
Ω ). Then the following inequality takes place:
. Then the following inequality takes place:") Lecture 8 Lemma 5. Let f : R R be a cotiuously differetiable covex fuctio. Choose a costat δ > ad cosider the subset Ωδ = { R f δ } R. Let Ωδ ad assume that f < δ, i.e., is ot o the boudary of f = δ, i.e.,
Lecture 8 Lemma 5. Let f : R R be a cotiuously differetiable covex fuctio. Choose a costat δ > ad cosider the subset Ωδ = { R f δ } R. Let Ωδ ad assume that f < δ, i.e., is ot o the boudary of f = δ, i.e.,
Notes 8 Singularities
 ECE 6382 Fall 27 David R. Jackso Notes 8 Sigularities Notes are from D. R. Wilto, Dept. of ECE Sigularity A poit s is a sigularity of the fuctio f () if the fuctio is ot aalytic at s. (The fuctio does
ECE 6382 Fall 27 David R. Jackso Notes 8 Sigularities Notes are from D. R. Wilto, Dept. of ECE Sigularity A poit s is a sigularity of the fuctio f () if the fuctio is ot aalytic at s. (The fuctio does
A) is empty. B) is a finite set. C) can be a countably infinite set. D) can be an uncountable set.
 is empty. B) is a finite set. C) can be a countably infinite set. D) can be an uncountable set.") M.A./M.Sc. (Mathematics) Etrace Examiatio 016-17 Max Time: hours Max Marks: 150 Istructios: There are 50 questios. Every questio has four choices of which exactly oe is correct. For correct aswer, 3 marks
M.A./M.Sc. (Mathematics) Etrace Examiatio 016-17 Max Time: hours Max Marks: 150 Istructios: There are 50 questios. Every questio has four choices of which exactly oe is correct. For correct aswer, 3 marks
9.3 Power Series: Taylor & Maclaurin Series
 9.3 Power Series: Taylor & Maclauri Series If is a variable, the a ifiite series of the form 0 is called a power series (cetered at 0 ). a a a a a 0 1 0 is a power series cetered at a c a a c a c a c 0
9.3 Power Series: Taylor & Maclauri Series If is a variable, the a ifiite series of the form 0 is called a power series (cetered at 0 ). a a a a a 0 1 0 is a power series cetered at a c a a c a c a c 0
ALGEBRAIC GEOMETRY COURSE NOTES, LECTURE 5: SINGULARITIES.
 ALGEBRAIC GEOMETRY COURSE NOTES, LECTURE 5: SINGULARITIES. ANDREW SALCH 1. The Jacobia criterio for osigularity. You have probably oticed by ow that some poits o varieties are smooth i a sese somethig
ALGEBRAIC GEOMETRY COURSE NOTES, LECTURE 5: SINGULARITIES. ANDREW SALCH 1. The Jacobia criterio for osigularity. You have probably oticed by ow that some poits o varieties are smooth i a sese somethig
Orthogonal transformations
 Orthogoal trasformatios October 12, 2014 1 Defiig property The squared legth of a vector is give by takig the dot product of a vector with itself, v 2 v v g ij v i v j A orthogoal trasformatio is a liear
Orthogoal trasformatios October 12, 2014 1 Defiig property The squared legth of a vector is give by takig the dot product of a vector with itself, v 2 v v g ij v i v j A orthogoal trasformatio is a liear
The Jordan Normal Form: A General Approach to Solving Homogeneous Linear Systems. Mike Raugh. March 20, 2005
 The Jorda Normal Form: A Geeral Approach to Solvig Homogeeous Liear Sstems Mike Raugh March 2, 25 What are we doig here? I this ote, we describe the Jorda ormal form of a matrix ad show how it ma be used
The Jorda Normal Form: A Geeral Approach to Solvig Homogeeous Liear Sstems Mike Raugh March 2, 25 What are we doig here? I this ote, we describe the Jorda ormal form of a matrix ad show how it ma be used
( ) ( ) ( ) notation: [ ]
![( ) ( ) ( ) notation: [ ]](/thumbs/78/77913392.jpg "( ) ( ) ( ) notation: [ ]") Liear Algebra Vectors ad Matrices Fudametal Operatios with Vectors Vector: a directed lie segmets that has both magitude ad directio =,,,..., =,,,..., = where 1, 2,, are the otatio: [ ] 1 2 3 1 2 3 compoets
Liear Algebra Vectors ad Matrices Fudametal Operatios with Vectors Vector: a directed lie segmets that has both magitude ad directio =,,,..., =,,,..., = where 1, 2,, are the otatio: [ ] 1 2 3 1 2 3 compoets
The Boolean Ring of Intervals
 MATH 532 Lebesgue Measure Dr. Neal, WKU We ow shall apply the results obtaied about outer measure to the legth measure o the real lie. Throughout, our space X will be the set of real umbers R. Whe ecessary,
MATH 532 Lebesgue Measure Dr. Neal, WKU We ow shall apply the results obtaied about outer measure to the legth measure o the real lie. Throughout, our space X will be the set of real umbers R. Whe ecessary,
Math 203A, Solution Set 8.
 Math 20A, Solutio Set 8 Problem 1 Give four geeral lies i P, show that there are exactly 2 lies which itersect all four of them Aswer: Recall that the space of lies i P is parametrized by the Grassmaia
Math 20A, Solutio Set 8 Problem 1 Give four geeral lies i P, show that there are exactly 2 lies which itersect all four of them Aswer: Recall that the space of lies i P is parametrized by the Grassmaia
Improvement of Generic Attacks on the Rank Syndrome Decoding Problem
 Improvemet of Geeric Attacks o the Rak Sydrome Decodig Problem Nicolas Arago, Philippe Gaborit, Adrie Hauteville, Jea-Pierre Tillich To cite this versio: Nicolas Arago, Philippe Gaborit, Adrie Hauteville,
Improvemet of Geeric Attacks o the Rak Sydrome Decodig Problem Nicolas Arago, Philippe Gaborit, Adrie Hauteville, Jea-Pierre Tillich To cite this versio: Nicolas Arago, Philippe Gaborit, Adrie Hauteville,
Feedback in Iterative Algorithms
 Feedback i Iterative Algorithms Charles Byre (Charles Byre@uml.edu), Departmet of Mathematical Scieces, Uiversity of Massachusetts Lowell, Lowell, MA 01854 October 17, 2005 Abstract Whe the oegative system
Feedback i Iterative Algorithms Charles Byre (Charles Byre@uml.edu), Departmet of Mathematical Scieces, Uiversity of Massachusetts Lowell, Lowell, MA 01854 October 17, 2005 Abstract Whe the oegative system
Chapter 2 The Solution of Numerical Algebraic and Transcendental Equations
 Chapter The Solutio of Numerical Algebraic ad Trascedetal Equatios Itroductio I this chapter we shall discuss some umerical methods for solvig algebraic ad trascedetal equatios. The equatio f( is said
Chapter The Solutio of Numerical Algebraic ad Trascedetal Equatios Itroductio I this chapter we shall discuss some umerical methods for solvig algebraic ad trascedetal equatios. The equatio f( is said
1 Duality revisited. AM 221: Advanced Optimization Spring 2016
 AM 22: Advaced Optimizatio Sprig 206 Prof. Yaro Siger Sectio 7 Wedesday, Mar. 9th Duality revisited I this sectio, we will give a slightly differet perspective o duality. optimizatio program: f(x) x R
AM 22: Advaced Optimizatio Sprig 206 Prof. Yaro Siger Sectio 7 Wedesday, Mar. 9th Duality revisited I this sectio, we will give a slightly differet perspective o duality. optimizatio program: f(x) x R
Solutions to Homework 1
 Solutios to Homework MATH 36. Describe geometrically the sets of poits z i the complex plae defied by the followig relatios /z = z () Re(az + b) >, where a, b (2) Im(z) = c, with c (3) () = = z z = z 2.
Solutios to Homework MATH 36. Describe geometrically the sets of poits z i the complex plae defied by the followig relatios /z = z () Re(az + b) >, where a, b (2) Im(z) = c, with c (3) () = = z z = z 2.
Symmetric Matrices and Quadratic Forms
 7 Symmetric Matrices ad Quadratic Forms 7.1 DIAGONALIZAION OF SYMMERIC MARICES SYMMERIC MARIX A symmetric matrix is a matrix A such that. A = A Such a matrix is ecessarily square. Its mai diagoal etries
7 Symmetric Matrices ad Quadratic Forms 7.1 DIAGONALIZAION OF SYMMERIC MARICES SYMMERIC MARIX A symmetric matrix is a matrix A such that. A = A Such a matrix is ecessarily square. Its mai diagoal etries
Math Solutions to homework 6
 Math 175 - Solutios to homework 6 Cédric De Groote November 16, 2017 Problem 1 (8.11 i the book): Let K be a compact Hermitia operator o a Hilbert space H ad let the kerel of K be {0}. Show that there
Math 175 - Solutios to homework 6 Cédric De Groote November 16, 2017 Problem 1 (8.11 i the book): Let K be a compact Hermitia operator o a Hilbert space H ad let the kerel of K be {0}. Show that there
Early Work by D Arcy Thompson
 Potetial Projects Recogitio ad classificatio Face recogitio: uder age variatio Image-based disease diagosis Shoe image classificatio Scee uderstadig CIS 5543 Computer Visio Shape Aalysis Matchig & registratio
Potetial Projects Recogitio ad classificatio Face recogitio: uder age variatio Image-based disease diagosis Shoe image classificatio Scee uderstadig CIS 5543 Computer Visio Shape Aalysis Matchig & registratio
Distributional Similarity Models (cont.)
") Sematic Similarity Vector Space Model Similarity Measures cosie Euclidea distace... Clusterig k-meas hierarchical Last Time EM Clusterig Soft versio of K-meas clusterig Iput: m dimesioal objects X = {
Sematic Similarity Vector Space Model Similarity Measures cosie Euclidea distace... Clusterig k-meas hierarchical Last Time EM Clusterig Soft versio of K-meas clusterig Iput: m dimesioal objects X = {
APPLICATION OF YOUNG S INEQUALITY TO VOLUMES OF CONVEX SETS
 APPLICATION OF YOUNG S INEQUALITY TO VOLUMES OF CONVEX SETS 1. Itroductio Let C be a bouded, covex subset of. Thus, by defiitio, with every two poits i the set, the lie segmet coectig these two poits is
APPLICATION OF YOUNG S INEQUALITY TO VOLUMES OF CONVEX SETS 1. Itroductio Let C be a bouded, covex subset of. Thus, by defiitio, with every two poits i the set, the lie segmet coectig these two poits is
The inverse eigenvalue problem for symmetric doubly stochastic matrices
 Liear Algebra ad its Applicatios 379 (004) 77 83 www.elsevier.com/locate/laa The iverse eigevalue problem for symmetric doubly stochastic matrices Suk-Geu Hwag a,,, Sug-Soo Pyo b, a Departmet of Mathematics
Liear Algebra ad its Applicatios 379 (004) 77 83 www.elsevier.com/locate/laa The iverse eigevalue problem for symmetric doubly stochastic matrices Suk-Geu Hwag a,,, Sug-Soo Pyo b, a Departmet of Mathematics
MASSACHUSETTS INSTITUTE OF TECHNOLOGY 6.265/15.070J Fall 2013 Lecture 21 11/27/2013
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY 6.265/15.070J Fall 2013 Lecture 21 11/27/2013 Fuctioal Law of Large Numbers. Costructio of the Wieer Measure Cotet. 1. Additioal techical results o weak covergece
MASSACHUSETTS INSTITUTE OF TECHNOLOGY 6.265/15.070J Fall 2013 Lecture 21 11/27/2013 Fuctioal Law of Large Numbers. Costructio of the Wieer Measure Cotet. 1. Additioal techical results o weak covergece
If a subset E of R contains no open interval, is it of zero measure? For instance, is the set of irrationals in [0, 1] is of measure zero?
![If a subset E of R contains no open interval, is it of zero measure? For instance, is the set of irrationals in [0, 1] is of measure zero?](/thumbs/89/99848926.jpg "If a subset E of R contains no open interval, is it of zero measure? For instance, is the set of irrationals in [0, 1] is of measure zero?") 2 Lebesgue Measure I Chapter 1 we defied the cocept of a set of measure zero, ad we have observed that every coutable set is of measure zero. Here are some atural questios: If a subset E of R cotais a
2 Lebesgue Measure I Chapter 1 we defied the cocept of a set of measure zero, ad we have observed that every coutable set is of measure zero. Here are some atural questios: If a subset E of R cotais a