PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
|
|
|
- Bridget Sanders
- 5 years ago
- Views:
Transcription

1 Part 3 Chapter 10 LU Factorization PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction or display.
2 Chapter Objectives Understanding that LU factorization involves decomposing the coefficient matrix into two triangular matrices that can then be used to efficiently evaluate different right-hand-side vectors. Knowing how to express Gauss elimination as an LU factorization. Given an LU factorization, knowing how to evaluate multiple right-hand-side vectors. Recognizing that Cholesky s method provides an efficient way to decompose a symmetric matrix and that the resulting triangular matrix and its transpose can be used to evaluate right-hand-side vectors efficiently. Understanding in general terms what happens when MATLAB s backslash operator is used to solve linear systems. 2
3 LU Factorization Recall that the forward-elimination step of Gauss elimination comprises the bulk of the computational effort. LU factorization methods separate the time-consuming elimination of the matrix [A] from the manipulations of the right-hand-side [b]. Once [A] has been factored (or decomposed), multiple righthand-side vectors can be evaluated in an efficient manner. 3
![LU Factorization LU factorization involves two steps: Factorization to decompose the [A] matrix into a product of a lower triangular matrix [L] and an](/docs-images/96/127103009/images/4-0.jpg "upper triangular matrix [U]. [L] has 1 for each entry on the diagonal.")
4 LU Factorization LU factorization involves two steps: Factorization to decompose the [A] matrix into a product of a lower triangular matrix [L] and an upper triangular matrix [U]. [L] has 1 for each entry on the diagonal. Substitution to solve for {x} Gauss elimination can be implemented in LU factorization 4
5 Gauss Elimination as LU Factorization [A]{x}={b} can be rewritten as [L][U]{x}={b} using LU factorization. The LU factorization algorithm requires the same total flops as for Gauss elimination. The main advantage is once [A] is decomposed, the same [L] and [U] can be used for multiple {b} vectors. MATLAB s lu function can be used to generate the [L] and [U] matrices: [L, U] = lu(a) 5
6 a a a a21 an 1 a n nn ( f a a ) ( f n a a ) 1 n1 11 a a a 0 a a a a 32 0 a n2 a n n nn ( f a a ) ( fn2 a n2 a 22) a11 a12 a1 n 0 a 22 a 23 0 a a n3 a nn ( f a a ) ( fn3 a n3 a 33) a a a 0 a a a 0 a a n n 33 3n ( n 1) a nn U f f f43 0 fn 1 fn2 fn3 fnn 1 1 L It can be proved that A LU. 6
7 Gauss Elimination as LU Factorization (cont) To solve [A]{x}={b}, first decompose [A] to get [L][U]{x}={b} Set up and solve [L]{d}={b}, where {d} can be found using forward substitution. Set up and solve [U]{x}={d}, where {x} can be found using backward substitution. In MATLAB: [L, U] = lu(a) d = L\b x = U\d 7
8 Cholesky Factorization Symmetric systems occur commonly in both mathematical and engineering/science problem contexts, and there are special solution techniques available for such systems. The Cholesky factorization is one of the most popular of these techniques, and is based on the fact that a symmetric matrix can be decomposed as [A]= [U] T [U], where T stands for transpose. The rest of the process is similar to LU decomposition and Gauss elimination, except only one matrix, [U], needs to be stored. 8
9 U u u u u 0 u u u 0 0 u u u U T u u11 u12 u13 u14 u12 u u22 u23 u 24 U u13 u23 u u33 u34 u14 u24 u34 u u44 u u u u u u u u12 u22 u12u13 u22u23 u12u14 u22u u13 u23 u33 u13u14 u23u24 u33u u14 u24 u34 u44 a a a a a a a a a a i1 2 ii ii ki k 1 u a u i1 a u u u j i n ij ki kj k 1 and ij for 1,, uii 9
10 MATLAB MATLAB can perform a Cholesky factorization with the builtin chol command: U = chol(a) MATLAB s left division operator \ examines the system to see which method will most efficiently solve the problem. This includes trying banded solvers, back and forward substitutions, Cholesky factorization for symmetric systems. If these do not work and the system is square, Gauss elimination with partial pivoting is used. 10
11 Part 3 Chapter 11 Matrix Inverse and Condition PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction or display.
12 Chapter Objectives Knowing how to determine the matrix inverse in an efficient manner based on LU factorization. Understanding how the matrix inverse can be used to assess stimulus-response characteristics of engineering systems. Understanding the meaning of matrix and vector norms and how they are computed. Knowing how to use norms to compute the matrix condition number. Understanding how the magnitude of the condition number can be used to estimate the precision of solutions of linear algebraic equations. 12
13 Matrix Inverse Recall that if a matrix [A] is square, there is another matrix [A] -1, called the inverse of [A], for which [A][A] -1 =[A] -1 [A]=[I] The inverse can be computed in a column by column fashion by generating solutions with unit vectors as the right-hand-side constants: A x A x 2 A 1 x 1 x 2 x A x 3 13
14 Matrix Inverse (cont) Recall that LU factorization can be used to efficiently evaluate a system for multiple right-hand-side vectors - thus, it is ideal for evaluating the multiple unit vectors needed to compute the inverse. 14
15 Stimulus-Response Computations Many systems can be modeled as a linear combination of equations, and thus written as a matrix equation: Interactions response stimuli The system response can thus be found using the matrix inverse. 15
16 Vector and Matrix Norms A norm is a real-valued function that provides a measure of the size or length of multi-component mathematical entities such as vectors and matrices. Vector norms and matrix norms may be computed differently. 16
17 Vector Norms For a vector {X} of size n, the p-norm is: n p X p x i i1 Important examples of vector p-norms include: 1/ p n p 1:sum of the absolute values X 1 x i i1 n i1 p 2 :Euclidian norm (length) X 2 X e x i 2 p :maximum magnitude X max x i 1in 17
18 Matrix Norms Common matrix norms for a matrix [A] include: column - sum norm A 1 Frobenius norm A f a ij 2 row - sum norm spectral norm (2 norm) A n max a ij 1 jn i1 n n i1 j1 n max a ij 1in j1 1/2 A 2 max Note - max is the largest eigenvalue of [A] T [A]. 18
19 Matrix Condition Number The matrix condition number Cond[A] is obtained by calculating Cond[A]= A A -1 In can be shown that: X X Cond A A A The relative error of the norm of the computed solution can be as large as the relative error of the norm of the coefficients of [A] multiplied by the condition number. If the coefficients of [A] are known to t digit precision, the solution [X] may be valid to only t-log 10 (Cond[A]) digits. 19
20 MATLAB Commands MATLAB has built-in functions to compute both norms and condition numbers: norm(x,p) Compute the p norm of vector X, where p can be any number, inf, or fro (for the Euclidean norm) norm(a,p) Compute a norm of matrix A, where p can be 1, 2, inf, or fro (for the Frobenius norm) cond(x,p) or cond(a,p) Calculate the condition number of vector X or matrix A using the norm specified by p. If p is omitted, it is automatically set to 2. 20
21 The Hilbert matrix, n n n n1 n2 2n1 21
22 Part 3 Chapter 12 Iterative Methods PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction or display.
23 Chapter Objectives Understanding the difference between the Gauss-Seidel and Jacobi methods. Knowing how to assess diagonal dominance and knowing what it means. Recognizing how relaxation can be used to improve convergence of iterative methods. Understanding how to solve systems of nonlinear equations with successive substitution and Newton-Raphson. 23
24 Gauss-Seidel Method The Gauss-Seidel method is the most commonly used iterative method for solving linear algebraic equations [A]{x}={b}. The method solves each equation in a system for a particular variable, and then uses that value in later equations to solve later variables. For a 3x3 system with nonzero elements along the diagonal, for example, the j th iteration values are found from the j-1 th iteration using: a11x1 a12 x2 a13 x3 b1 a x a x a x b a x a x a x b x x x j 1 j 2 j 3 b a x a x a j1 j j j b a x a x a 22 j j b a x a x a 33 24
 Gauss-Seidel b) Jacobi")
25 Jacobi Iteration The Jacobi iteration is similar to the Gauss-Seidel method, except the j-1th information is used to update all variables in the jth iteration: a) Gauss-Seidel b) Jacobi 25
26 Convergence The convergence of an iterative method can be calculated by determining the relative percent change of each element in {x}. For example, for the i th element in the j th iteration, a,i x i j x i j1 x i j 100% The method is ended when all elements have converged to a set tolerance. 26
27 Diagonal Dominance The Gauss-Seidel method may diverge, but if the system is diagonally dominant, it will definitely converge. Diagonal dominance means: a ii n j1 ji a ij 27

28 MATLAB Program x 1 j b 1 a 12 x 2 j1 a 13 x 3 j1 a 11 x 2 j b 2 a 21 x 1 j a 23 x 3 j1 a 22 x 3 j b 3 a 31 x 1 j a 32 x 2 j a 33 28
29 Relaxation To enhance convergence, an iterative program can introduce relaxation where the value at a particular iteration is made up of a combination of the old value and the newly calculated value: x new i x new old i 1 x i where is a weighting factor that is assigned a value between 0 and 2. 0<<1: underrelaxation =1: no relaxation 1< 2: overrelaxation 29
30 Nonlinear Systems Nonlinear systems can also be solved using the same strategy as the Gauss-Seidel method - solve each system for one of the unknowns and update each unknown using information from the previous iteration. This is called successive substitution. 30


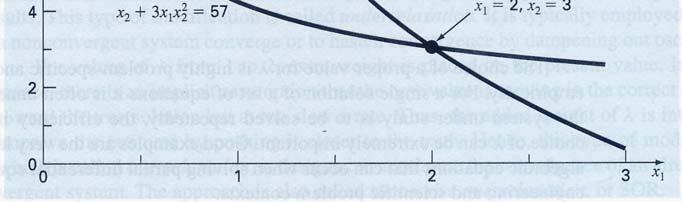




31 31
1.Chapter Objectives
 LU Factorization INDEX 1.Chapter objectives 2.Overview of LU factorization 2.1GAUSS ELIMINATION AS LU FACTORIZATION 2.2LU Factorization with Pivoting 2.3 MATLAB Function: lu 3. CHOLESKY FACTORIZATION 3.1
LU Factorization INDEX 1.Chapter objectives 2.Overview of LU factorization 2.1GAUSS ELIMINATION AS LU FACTORIZATION 2.2LU Factorization with Pivoting 2.3 MATLAB Function: lu 3. CHOLESKY FACTORIZATION 3.1
Today s class. Linear Algebraic Equations LU Decomposition. Numerical Methods, Fall 2011 Lecture 8. Prof. Jinbo Bi CSE, UConn
 Today s class Linear Algebraic Equations LU Decomposition 1 Linear Algebraic Equations Gaussian Elimination works well for solving linear systems of the form: AX = B What if you have to solve the linear
Today s class Linear Algebraic Equations LU Decomposition 1 Linear Algebraic Equations Gaussian Elimination works well for solving linear systems of the form: AX = B What if you have to solve the linear
Math/Phys/Engr 428, Math 529/Phys 528 Numerical Methods - Summer Homework 3 Due: Tuesday, July 3, 2018
 Math/Phys/Engr 428, Math 529/Phys 528 Numerical Methods - Summer 28. (Vector and Matrix Norms) Homework 3 Due: Tuesday, July 3, 28 Show that the l vector norm satisfies the three properties (a) x for x
Math/Phys/Engr 428, Math 529/Phys 528 Numerical Methods - Summer 28. (Vector and Matrix Norms) Homework 3 Due: Tuesday, July 3, 28 Show that the l vector norm satisfies the three properties (a) x for x
Process Model Formulation and Solution, 3E4
 Process Model Formulation and Solution, 3E4 Section B: Linear Algebraic Equations Instructor: Kevin Dunn dunnkg@mcmasterca Department of Chemical Engineering Course notes: Dr Benoît Chachuat 06 October
Process Model Formulation and Solution, 3E4 Section B: Linear Algebraic Equations Instructor: Kevin Dunn dunnkg@mcmasterca Department of Chemical Engineering Course notes: Dr Benoît Chachuat 06 October
DEN: Linear algebra numerical view (GEM: Gauss elimination method for reducing a full rank matrix to upper-triangular
 form) Given: matrix C = (c i,j ) n,m i,j=1 ODE and num math: Linear algebra (N) [lectures] c phabala 2016 DEN: Linear algebra numerical view (GEM: Gauss elimination method for reducing a full rank matrix
form) Given: matrix C = (c i,j ) n,m i,j=1 ODE and num math: Linear algebra (N) [lectures] c phabala 2016 DEN: Linear algebra numerical view (GEM: Gauss elimination method for reducing a full rank matrix
The Solution of Linear Systems AX = B
 Chapter 2 The Solution of Linear Systems AX = B 21 Upper-triangular Linear Systems We will now develop the back-substitution algorithm, which is useful for solving a linear system of equations that has
Chapter 2 The Solution of Linear Systems AX = B 21 Upper-triangular Linear Systems We will now develop the back-substitution algorithm, which is useful for solving a linear system of equations that has
Numerical Linear Algebra
 Numerical Linear Algebra Direct Methods Philippe B. Laval KSU Fall 2017 Philippe B. Laval (KSU) Linear Systems: Direct Solution Methods Fall 2017 1 / 14 Introduction The solution of linear systems is one
Numerical Linear Algebra Direct Methods Philippe B. Laval KSU Fall 2017 Philippe B. Laval (KSU) Linear Systems: Direct Solution Methods Fall 2017 1 / 14 Introduction The solution of linear systems is one
Linear Algebraic Equations
 Linear Algebraic Equations Linear Equations: a + a + a + a +... + a = c 11 1 12 2 13 3 14 4 1n n 1 a + a + a + a +... + a = c 21 2 2 23 3 24 4 2n n 2 a + a + a + a +... + a = c 31 1 32 2 33 3 34 4 3n n
Linear Algebraic Equations Linear Equations: a + a + a + a +... + a = c 11 1 12 2 13 3 14 4 1n n 1 a + a + a + a +... + a = c 21 2 2 23 3 24 4 2n n 2 a + a + a + a +... + a = c 31 1 32 2 33 3 34 4 3n n
Numerical Methods I Solving Square Linear Systems: GEM and LU factorization
 Numerical Methods I Solving Square Linear Systems: GEM and LU factorization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 18th,
Numerical Methods I Solving Square Linear Systems: GEM and LU factorization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 18th,
CE 206: Engineering Computation Sessional. System of Linear Equations
 CE 6: Engineering Computation Sessional System of Linear Equations Gauss Elimination orward elimination Starting with the first row, add or subtract multiples of that row to eliminate the first coefficient
CE 6: Engineering Computation Sessional System of Linear Equations Gauss Elimination orward elimination Starting with the first row, add or subtract multiples of that row to eliminate the first coefficient
Linear Algebraic Equations
 Linear Algebraic Equations 1 Fundamentals Consider the set of linear algebraic equations n a ij x i b i represented by Ax b j with [A b ] [A b] and (1a) r(a) rank of A (1b) Then Axb has a solution iff
Linear Algebraic Equations 1 Fundamentals Consider the set of linear algebraic equations n a ij x i b i represented by Ax b j with [A b ] [A b] and (1a) r(a) rank of A (1b) Then Axb has a solution iff
Linear System of Equations
 Linear System of Equations Linear systems are perhaps the most widely applied numerical procedures when real-world situation are to be simulated. Example: computing the forces in a TRUSS. F F 5. 77F F.
Linear System of Equations Linear systems are perhaps the most widely applied numerical procedures when real-world situation are to be simulated. Example: computing the forces in a TRUSS. F F 5. 77F F.
Linear Algebra Section 2.6 : LU Decomposition Section 2.7 : Permutations and transposes Wednesday, February 13th Math 301 Week #4
 Linear Algebra Section. : LU Decomposition Section. : Permutations and transposes Wednesday, February 1th Math 01 Week # 1 The LU Decomposition We learned last time that we can factor a invertible matrix
Linear Algebra Section. : LU Decomposition Section. : Permutations and transposes Wednesday, February 1th Math 01 Week # 1 The LU Decomposition We learned last time that we can factor a invertible matrix
Computational Economics and Finance
 Computational Economics and Finance Part II: Linear Equations Spring 2016 Outline Back Substitution, LU and other decomposi- Direct methods: tions Error analysis and condition numbers Iterative methods:
Computational Economics and Finance Part II: Linear Equations Spring 2016 Outline Back Substitution, LU and other decomposi- Direct methods: tions Error analysis and condition numbers Iterative methods:
Numerical Linear Algebra
 Chapter 3 Numerical Linear Algebra We review some techniques used to solve Ax = b where A is an n n matrix, and x and b are n 1 vectors (column vectors). We then review eigenvalues and eigenvectors and
Chapter 3 Numerical Linear Algebra We review some techniques used to solve Ax = b where A is an n n matrix, and x and b are n 1 vectors (column vectors). We then review eigenvalues and eigenvectors and
CS 246 Review of Linear Algebra 01/17/19
 1 Linear algebra In this section we will discuss vectors and matrices. We denote the (i, j)th entry of a matrix A as A ij, and the ith entry of a vector as v i. 1.1 Vectors and vector operations A vector
1 Linear algebra In this section we will discuss vectors and matrices. We denote the (i, j)th entry of a matrix A as A ij, and the ith entry of a vector as v i. 1.1 Vectors and vector operations A vector
Solving Linear Systems of Equations
 1 Solving Linear Systems of Equations Many practical problems could be reduced to solving a linear system of equations formulated as Ax = b This chapter studies the computational issues about directly
1 Solving Linear Systems of Equations Many practical problems could be reduced to solving a linear system of equations formulated as Ax = b This chapter studies the computational issues about directly
MATH 3511 Lecture 1. Solving Linear Systems 1
 MATH 3511 Lecture 1 Solving Linear Systems 1 Dmitriy Leykekhman Spring 2012 Goals Review of basic linear algebra Solution of simple linear systems Gaussian elimination D Leykekhman - MATH 3511 Introduction
MATH 3511 Lecture 1 Solving Linear Systems 1 Dmitriy Leykekhman Spring 2012 Goals Review of basic linear algebra Solution of simple linear systems Gaussian elimination D Leykekhman - MATH 3511 Introduction
Linear System of Equations
 Linear System of Equations Linear systems are perhaps the most widely applied numerical procedures when real-world situation are to be simulated. Example: computing the forces in a TRUSS. F F 5. 77F F.
Linear System of Equations Linear systems are perhaps the most widely applied numerical procedures when real-world situation are to be simulated. Example: computing the forces in a TRUSS. F F 5. 77F F.
6. Iterative Methods for Linear Systems. The stepwise approach to the solution...
 6 Iterative Methods for Linear Systems The stepwise approach to the solution Miriam Mehl: 6 Iterative Methods for Linear Systems The stepwise approach to the solution, January 18, 2013 1 61 Large Sparse
6 Iterative Methods for Linear Systems The stepwise approach to the solution Miriam Mehl: 6 Iterative Methods for Linear Systems The stepwise approach to the solution, January 18, 2013 1 61 Large Sparse
Math 471 (Numerical methods) Chapter 3 (second half). System of equations
 Chapter 3 (second half). System of equations") Math 47 (Numerical methods) Chapter 3 (second half). System of equations Overlap 3.5 3.8 of Bradie 3.5 LU factorization w/o pivoting. Motivation: ( ) A I Gaussian Elimination (U L ) where U is upper triangular
Math 47 (Numerical methods) Chapter 3 (second half). System of equations Overlap 3.5 3.8 of Bradie 3.5 LU factorization w/o pivoting. Motivation: ( ) A I Gaussian Elimination (U L ) where U is upper triangular
LINEAR SYSTEMS (11) Intensive Computation
 Intensive Computation") LINEAR SYSTEMS () Intensive Computation 27-8 prof. Annalisa Massini Viviana Arrigoni EXACT METHODS:. GAUSSIAN ELIMINATION. 2. CHOLESKY DECOMPOSITION. ITERATIVE METHODS:. JACOBI. 2. GAUSS-SEIDEL 2 CHOLESKY
LINEAR SYSTEMS () Intensive Computation 27-8 prof. Annalisa Massini Viviana Arrigoni EXACT METHODS:. GAUSSIAN ELIMINATION. 2. CHOLESKY DECOMPOSITION. ITERATIVE METHODS:. JACOBI. 2. GAUSS-SEIDEL 2 CHOLESKY
Review of matrices. Let m, n IN. A rectangle of numbers written like A =
 Review of matrices Let m, n IN. A rectangle of numbers written like a 11 a 12... a 1n a 21 a 22... a 2n A =...... a m1 a m2... a mn where each a ij IR is called a matrix with m rows and n columns or an
Review of matrices Let m, n IN. A rectangle of numbers written like a 11 a 12... a 1n a 21 a 22... a 2n A =...... a m1 a m2... a mn where each a ij IR is called a matrix with m rows and n columns or an
6 Linear Systems of Equations
 6 Linear Systems of Equations Read sections 2.1 2.3, 2.4.1 2.4.5, 2.4.7, 2.7 Review questions 2.1 2.37, 2.43 2.67 6.1 Introduction When numerically solving two-point boundary value problems, the differential
6 Linear Systems of Equations Read sections 2.1 2.3, 2.4.1 2.4.5, 2.4.7, 2.7 Review questions 2.1 2.37, 2.43 2.67 6.1 Introduction When numerically solving two-point boundary value problems, the differential
. =. a i1 x 1 + a i2 x 2 + a in x n = b i. a 11 a 12 a 1n a 21 a 22 a 1n. i1 a i2 a in
 Vectors and Matrices Continued Remember that our goal is to write a system of algebraic equations as a matrix equation. Suppose we have the n linear algebraic equations a x + a 2 x 2 + a n x n = b a 2
Vectors and Matrices Continued Remember that our goal is to write a system of algebraic equations as a matrix equation. Suppose we have the n linear algebraic equations a x + a 2 x 2 + a n x n = b a 2
9.1 Preconditioned Krylov Subspace Methods
 Chapter 9 PRECONDITIONING 9.1 Preconditioned Krylov Subspace Methods 9.2 Preconditioned Conjugate Gradient 9.3 Preconditioned Generalized Minimal Residual 9.4 Relaxation Method Preconditioners 9.5 Incomplete
Chapter 9 PRECONDITIONING 9.1 Preconditioned Krylov Subspace Methods 9.2 Preconditioned Conjugate Gradient 9.3 Preconditioned Generalized Minimal Residual 9.4 Relaxation Method Preconditioners 9.5 Incomplete
Solving Linear Systems
 Solving Linear Systems Iterative Solutions Methods Philippe B. Laval KSU Fall 207 Philippe B. Laval (KSU) Linear Systems Fall 207 / 2 Introduction We continue looking how to solve linear systems of the
Solving Linear Systems Iterative Solutions Methods Philippe B. Laval KSU Fall 207 Philippe B. Laval (KSU) Linear Systems Fall 207 / 2 Introduction We continue looking how to solve linear systems of the
Scientific Computing: Dense Linear Systems
 Scientific Computing: Dense Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 February 9th, 2012 A. Donev (Courant Institute)
Scientific Computing: Dense Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 February 9th, 2012 A. Donev (Courant Institute)
MAC Module 2 Systems of Linear Equations and Matrices II. Learning Objectives. Upon completing this module, you should be able to :
 MAC 0 Module Systems of Linear Equations and Matrices II Learning Objectives Upon completing this module, you should be able to :. Find the inverse of a square matrix.. Determine whether a matrix is invertible..
MAC 0 Module Systems of Linear Equations and Matrices II Learning Objectives Upon completing this module, you should be able to :. Find the inverse of a square matrix.. Determine whether a matrix is invertible..
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 1 Chapter 4 Roundoff and Truncation Errors PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 1 Chapter 4 Roundoff and Truncation Errors PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
COURSE Numerical methods for solving linear systems. Practical solving of many problems eventually leads to solving linear systems.
 COURSE 9 4 Numerical methods for solving linear systems Practical solving of many problems eventually leads to solving linear systems Classification of the methods: - direct methods - with low number of
COURSE 9 4 Numerical methods for solving linear systems Practical solving of many problems eventually leads to solving linear systems Classification of the methods: - direct methods - with low number of
MATLAB Project: LU Factorization
 Name Purpose: To practice Lay's LU Factorization Algorithm and see how it is related to MATLAB's lu function. Prerequisite: Section 2.5 MATLAB functions used: *, lu; and ludat and gauss from Laydata4 Toolbox
Name Purpose: To practice Lay's LU Factorization Algorithm and see how it is related to MATLAB's lu function. Prerequisite: Section 2.5 MATLAB functions used: *, lu; and ludat and gauss from Laydata4 Toolbox
CLASSICAL ITERATIVE METHODS
 CLASSICAL ITERATIVE METHODS LONG CHEN In this notes we discuss classic iterative methods on solving the linear operator equation (1) Au = f, posed on a finite dimensional Hilbert space V = R N equipped
CLASSICAL ITERATIVE METHODS LONG CHEN In this notes we discuss classic iterative methods on solving the linear operator equation (1) Au = f, posed on a finite dimensional Hilbert space V = R N equipped
SOLVING LINEAR SYSTEMS
 SOLVING LINEAR SYSTEMS We want to solve the linear system a, x + + a,n x n = b a n, x + + a n,n x n = b n This will be done by the method used in beginning algebra, by successively eliminating unknowns
SOLVING LINEAR SYSTEMS We want to solve the linear system a, x + + a,n x n = b a n, x + + a n,n x n = b n This will be done by the method used in beginning algebra, by successively eliminating unknowns
Next topics: Solving systems of linear equations
 Next topics: Solving systems of linear equations 1 Gaussian elimination (today) 2 Gaussian elimination with partial pivoting (Week 9) 3 The method of LU-decomposition (Week 10) 4 Iterative techniques:
Next topics: Solving systems of linear equations 1 Gaussian elimination (today) 2 Gaussian elimination with partial pivoting (Week 9) 3 The method of LU-decomposition (Week 10) 4 Iterative techniques:
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 6 Chapter 20 Initial-Value Problems PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 6 Chapter 20 Initial-Value Problems PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Scientific Computing
 Scientific Computing Direct solution methods Martin van Gijzen Delft University of Technology October 3, 2018 1 Program October 3 Matrix norms LU decomposition Basic algorithm Cost Stability Pivoting Pivoting
Scientific Computing Direct solution methods Martin van Gijzen Delft University of Technology October 3, 2018 1 Program October 3 Matrix norms LU decomposition Basic algorithm Cost Stability Pivoting Pivoting
Solution of Linear Equations
 Solution of Linear Equations (Com S 477/577 Notes) Yan-Bin Jia Sep 7, 07 We have discussed general methods for solving arbitrary equations, and looked at the special class of polynomial equations A subclass
Solution of Linear Equations (Com S 477/577 Notes) Yan-Bin Jia Sep 7, 07 We have discussed general methods for solving arbitrary equations, and looked at the special class of polynomial equations A subclass
7.5 Operations with Matrices. Copyright Cengage Learning. All rights reserved.
 7.5 Operations with Matrices Copyright Cengage Learning. All rights reserved. What You Should Learn Decide whether two matrices are equal. Add and subtract matrices and multiply matrices by scalars. Multiply
7.5 Operations with Matrices Copyright Cengage Learning. All rights reserved. What You Should Learn Decide whether two matrices are equal. Add and subtract matrices and multiply matrices by scalars. Multiply
Numerical Methods I: Numerical linear algebra
 1/3 Numerical Methods I: Numerical linear algebra Georg Stadler Courant Institute, NYU stadler@cimsnyuedu September 1, 017 /3 We study the solution of linear systems of the form Ax = b with A R n n, x,
1/3 Numerical Methods I: Numerical linear algebra Georg Stadler Courant Institute, NYU stadler@cimsnyuedu September 1, 017 /3 We study the solution of linear systems of the form Ax = b with A R n n, x,
A LINEAR SYSTEMS OF EQUATIONS. By : Dewi Rachmatin
 A LINEAR SYSTEMS OF EQUATIONS By : Dewi Rachmatin Back Substitution We will now develop the backsubstitution algorithm, which is useful for solving a linear system of equations that has an upper-triangular
A LINEAR SYSTEMS OF EQUATIONS By : Dewi Rachmatin Back Substitution We will now develop the backsubstitution algorithm, which is useful for solving a linear system of equations that has an upper-triangular
Solving Dense Linear Systems I
 Solving Dense Linear Systems I Solving Ax = b is an important numerical method Triangular system: [ l11 l 21 if l 11, l 22 0, ] [ ] [ ] x1 b1 = l 22 x 2 b 2 x 1 = b 1 /l 11 x 2 = (b 2 l 21 x 1 )/l 22 Chih-Jen
Solving Dense Linear Systems I Solving Ax = b is an important numerical method Triangular system: [ l11 l 21 if l 11, l 22 0, ] [ ] [ ] x1 b1 = l 22 x 2 b 2 x 1 = b 1 /l 11 x 2 = (b 2 l 21 x 1 )/l 22 Chih-Jen
Numerical Analysis: Solving Systems of Linear Equations
 Numerical Analysis: Solving Systems of Linear Equations Mirko Navara http://cmpfelkcvutcz/ navara/ Center for Machine Perception, Department of Cybernetics, FEE, CTU Karlovo náměstí, building G, office
Numerical Analysis: Solving Systems of Linear Equations Mirko Navara http://cmpfelkcvutcz/ navara/ Center for Machine Perception, Department of Cybernetics, FEE, CTU Karlovo náměstí, building G, office
CS 323: Numerical Analysis and Computing
 CS 323: Numerical Analysis and Computing MIDTERM #1 Instructions: This is an open notes exam, i.e., you are allowed to consult any textbook, your class notes, homeworks, or any of the handouts from us.
CS 323: Numerical Analysis and Computing MIDTERM #1 Instructions: This is an open notes exam, i.e., you are allowed to consult any textbook, your class notes, homeworks, or any of the handouts from us.
Chapter 2. Solving Systems of Equations. 2.1 Gaussian elimination
 Chapter 2 Solving Systems of Equations A large number of real life applications which are resolved through mathematical modeling will end up taking the form of the following very simple looking matrix
Chapter 2 Solving Systems of Equations A large number of real life applications which are resolved through mathematical modeling will end up taking the form of the following very simple looking matrix
Computational Methods. Systems of Linear Equations
 Computational Methods Systems of Linear Equations Manfred Huber 2010 1 Systems of Equations Often a system model contains multiple variables (parameters) and contains multiple equations Multiple equations
Computational Methods Systems of Linear Equations Manfred Huber 2010 1 Systems of Equations Often a system model contains multiple variables (parameters) and contains multiple equations Multiple equations
Gaussian Elimination without/with Pivoting and Cholesky Decomposition
 Gaussian Elimination without/with Pivoting and Cholesky Decomposition Gaussian Elimination WITHOUT pivoting Notation: For a matrix A R n n we define for k {,,n} the leading principal submatrix a a k A
Gaussian Elimination without/with Pivoting and Cholesky Decomposition Gaussian Elimination WITHOUT pivoting Notation: For a matrix A R n n we define for k {,,n} the leading principal submatrix a a k A
Iterative Methods. Splitting Methods
 Iterative Methods Splitting Methods 1 Direct Methods Solving Ax = b using direct methods. Gaussian elimination (using LU decomposition) Variants of LU, including Crout and Doolittle Other decomposition
Iterative Methods Splitting Methods 1 Direct Methods Solving Ax = b using direct methods. Gaussian elimination (using LU decomposition) Variants of LU, including Crout and Doolittle Other decomposition
Math 5630: Iterative Methods for Systems of Equations Hung Phan, UMass Lowell March 22, 2018
 1 Linear Systems Math 5630: Iterative Methods for Systems of Equations Hung Phan, UMass Lowell March, 018 Consider the system 4x y + z = 7 4x 8y + z = 1 x + y + 5z = 15. We then obtain x = 1 4 (7 + y z)
1 Linear Systems Math 5630: Iterative Methods for Systems of Equations Hung Phan, UMass Lowell March, 018 Consider the system 4x y + z = 7 4x 8y + z = 1 x + y + 5z = 15. We then obtain x = 1 4 (7 + y z)
Computational Linear Algebra
 Computational Linear Algebra PD Dr. rer. nat. habil. Ralf Peter Mundani Computation in Engineering / BGU Scientific Computing in Computer Science / INF Winter Term 2017/18 Part 2: Direct Methods PD Dr.
Computational Linear Algebra PD Dr. rer. nat. habil. Ralf Peter Mundani Computation in Engineering / BGU Scientific Computing in Computer Science / INF Winter Term 2017/18 Part 2: Direct Methods PD Dr.
Linear algebra. Unit I. Linear Algebra. Tasks of computational linear algebra. Linear systems: mathematical facts. Linear system: numerical issue
 Unit I Linear Algebra Linear algebra direct solution methods Gaussian and Gauss-Jordan elimination with pivoting matrix factorizations (LU, Cholesky & QR) quantifying inaccuracy conditioning iterative
Unit I Linear Algebra Linear algebra direct solution methods Gaussian and Gauss-Jordan elimination with pivoting matrix factorizations (LU, Cholesky & QR) quantifying inaccuracy conditioning iterative
Direct Methods for Solving Linear Systems. Simon Fraser University Surrey Campus MACM 316 Spring 2005 Instructor: Ha Le
 Direct Methods for Solving Linear Systems Simon Fraser University Surrey Campus MACM 316 Spring 2005 Instructor: Ha Le 1 Overview General Linear Systems Gaussian Elimination Triangular Systems The LU Factorization
Direct Methods for Solving Linear Systems Simon Fraser University Surrey Campus MACM 316 Spring 2005 Instructor: Ha Le 1 Overview General Linear Systems Gaussian Elimination Triangular Systems The LU Factorization
TMA4125 Matematikk 4N Spring 2017
 Norwegian University of Science and Technology Institutt for matematiske fag TMA15 Matematikk N Spring 17 Solutions to exercise set 1 1 We begin by writing the system as the augmented matrix.139.38.3 6.
Norwegian University of Science and Technology Institutt for matematiske fag TMA15 Matematikk N Spring 17 Solutions to exercise set 1 1 We begin by writing the system as the augmented matrix.139.38.3 6.
The following steps will help you to record your work and save and submit it successfully.
 MATH 22AL Lab # 4 1 Objectives In this LAB you will explore the following topics using MATLAB. Properties of invertible matrices. Inverse of a Matrix Explore LU Factorization 2 Recording and submitting
MATH 22AL Lab # 4 1 Objectives In this LAB you will explore the following topics using MATLAB. Properties of invertible matrices. Inverse of a Matrix Explore LU Factorization 2 Recording and submitting
Preliminary/Qualifying Exam in Numerical Analysis (Math 502a) Spring 2012
 Spring 2012") Instructions Preliminary/Qualifying Exam in Numerical Analysis (Math 502a) Spring 2012 The exam consists of four problems, each having multiple parts. You should attempt to solve all four problems. 1.
Instructions Preliminary/Qualifying Exam in Numerical Analysis (Math 502a) Spring 2012 The exam consists of four problems, each having multiple parts. You should attempt to solve all four problems. 1.
JACOBI S ITERATION METHOD
 ITERATION METHODS These are methods which compute a sequence of progressively accurate iterates to approximate the solution of Ax = b. We need such methods for solving many large linear systems. Sometimes
ITERATION METHODS These are methods which compute a sequence of progressively accurate iterates to approximate the solution of Ax = b. We need such methods for solving many large linear systems. Sometimes
Solving Linear Systems of Equations
 November 6, 2013 Introduction The type of problems that we have to solve are: Solve the system: A x = B, where a 11 a 1N a 12 a 2N A =.. a 1N a NN x = x 1 x 2. x N B = b 1 b 2. b N To find A 1 (inverse
November 6, 2013 Introduction The type of problems that we have to solve are: Solve the system: A x = B, where a 11 a 1N a 12 a 2N A =.. a 1N a NN x = x 1 x 2. x N B = b 1 b 2. b N To find A 1 (inverse
Direct Methods for Solving Linear Systems. Matrix Factorization
 Direct Methods for Solving Linear Systems Matrix Factorization Numerical Analysis (9th Edition) R L Burden & J D Faires Beamer Presentation Slides prepared by John Carroll Dublin City University c 2011
Direct Methods for Solving Linear Systems Matrix Factorization Numerical Analysis (9th Edition) R L Burden & J D Faires Beamer Presentation Slides prepared by John Carroll Dublin City University c 2011
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 6 Chapter 20 Initial-Value Problems PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 6 Chapter 20 Initial-Value Problems PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
10.2 ITERATIVE METHODS FOR SOLVING LINEAR SYSTEMS. The Jacobi Method
 54 CHAPTER 10 NUMERICAL METHODS 10. ITERATIVE METHODS FOR SOLVING LINEAR SYSTEMS As a numerical technique, Gaussian elimination is rather unusual because it is direct. That is, a solution is obtained after
54 CHAPTER 10 NUMERICAL METHODS 10. ITERATIVE METHODS FOR SOLVING LINEAR SYSTEMS As a numerical technique, Gaussian elimination is rather unusual because it is direct. That is, a solution is obtained after
Direct Methods for solving Linear Equation Systems
 REVIEW Lecture 5: Systems of Linear Equations Spring 2015 Lecture 6 Direct Methods for solving Linear Equation Systems Determinants and Cramer s Rule Gauss Elimination Algorithm Forward Elimination/Reduction
REVIEW Lecture 5: Systems of Linear Equations Spring 2015 Lecture 6 Direct Methods for solving Linear Equation Systems Determinants and Cramer s Rule Gauss Elimination Algorithm Forward Elimination/Reduction
9. Iterative Methods for Large Linear Systems
 EE507 - Computational Techniques for EE Jitkomut Songsiri 9. Iterative Methods for Large Linear Systems introduction splitting method Jacobi method Gauss-Seidel method successive overrelaxation (SOR) 9-1
EE507 - Computational Techniques for EE Jitkomut Songsiri 9. Iterative Methods for Large Linear Systems introduction splitting method Jacobi method Gauss-Seidel method successive overrelaxation (SOR) 9-1
AMS 147 Computational Methods and Applications Lecture 17 Copyright by Hongyun Wang, UCSC
 Lecture 17 Copyright by Hongyun Wang, UCSC Recap: Solving linear system A x = b Suppose we are given the decomposition, A = L U. We solve (LU) x = b in 2 steps: *) Solve L y = b using the forward substitution
Lecture 17 Copyright by Hongyun Wang, UCSC Recap: Solving linear system A x = b Suppose we are given the decomposition, A = L U. We solve (LU) x = b in 2 steps: *) Solve L y = b using the forward substitution
LECTURE NOTES ELEMENTARY NUMERICAL METHODS. Eusebius Doedel
 LECTURE NOTES on ELEMENTARY NUMERICAL METHODS Eusebius Doedel TABLE OF CONTENTS Vector and Matrix Norms 1 Banach Lemma 20 The Numerical Solution of Linear Systems 25 Gauss Elimination 25 Operation Count
LECTURE NOTES on ELEMENTARY NUMERICAL METHODS Eusebius Doedel TABLE OF CONTENTS Vector and Matrix Norms 1 Banach Lemma 20 The Numerical Solution of Linear Systems 25 Gauss Elimination 25 Operation Count
Numerical Analysis: Solutions of System of. Linear Equation. Natasha S. Sharma, PhD
 Mathematical Question we are interested in answering numerically How to solve the following linear system for x Ax = b? where A is an n n invertible matrix and b is vector of length n. Notation: x denote
Mathematical Question we are interested in answering numerically How to solve the following linear system for x Ax = b? where A is an n n invertible matrix and b is vector of length n. Notation: x denote
Jordan Journal of Mathematics and Statistics (JJMS) 5(3), 2012, pp A NEW ITERATIVE METHOD FOR SOLVING LINEAR SYSTEMS OF EQUATIONS
 5(3), 2012, pp A NEW ITERATIVE METHOD FOR SOLVING LINEAR SYSTEMS OF EQUATIONS") Jordan Journal of Mathematics and Statistics JJMS) 53), 2012, pp.169-184 A NEW ITERATIVE METHOD FOR SOLVING LINEAR SYSTEMS OF EQUATIONS ADEL H. AL-RABTAH Abstract. The Jacobi and Gauss-Seidel iterative
Jordan Journal of Mathematics and Statistics JJMS) 53), 2012, pp.169-184 A NEW ITERATIVE METHOD FOR SOLVING LINEAR SYSTEMS OF EQUATIONS ADEL H. AL-RABTAH Abstract. The Jacobi and Gauss-Seidel iterative
ACM106a - Homework 2 Solutions
 ACM06a - Homework 2 Solutions prepared by Svitlana Vyetrenko October 7, 2006. Chapter 2, problem 2.2 (solution adapted from Golub, Van Loan, pp.52-54): For the proof we will use the fact that if A C m
ACM06a - Homework 2 Solutions prepared by Svitlana Vyetrenko October 7, 2006. Chapter 2, problem 2.2 (solution adapted from Golub, Van Loan, pp.52-54): For the proof we will use the fact that if A C m
MATRICES. a m,1 a m,n A =
 MATRICES Matrices are rectangular arrays of real or complex numbers With them, we define arithmetic operations that are generalizations of those for real and complex numbers The general form a matrix of
MATRICES Matrices are rectangular arrays of real or complex numbers With them, we define arithmetic operations that are generalizations of those for real and complex numbers The general form a matrix of
Solving a System of Equations
 Solving a System of Eqations Objectives Understand how to solve a system of eqations with: - Gass Elimination Method - LU Decomposition Method - Gass-Seidel Method - Jacobi Method A system of linear algebraic
Solving a System of Eqations Objectives Understand how to solve a system of eqations with: - Gass Elimination Method - LU Decomposition Method - Gass-Seidel Method - Jacobi Method A system of linear algebraic
Review Questions REVIEW QUESTIONS 71
 REVIEW QUESTIONS 71 MATLAB, is [42]. For a comprehensive treatment of error analysis and perturbation theory for linear systems and many other problems in linear algebra, see [126, 241]. An overview of
REVIEW QUESTIONS 71 MATLAB, is [42]. For a comprehensive treatment of error analysis and perturbation theory for linear systems and many other problems in linear algebra, see [126, 241]. An overview of
Introduction to PDEs and Numerical Methods Lecture 7. Solving linear systems
 Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen Introduction to PDEs and Numerical Methods Lecture 7. Solving linear systems Dr. Noemi Friedman, 09.2.205. Reminder: Instationary heat
Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen Introduction to PDEs and Numerical Methods Lecture 7. Solving linear systems Dr. Noemi Friedman, 09.2.205. Reminder: Instationary heat
Numerical Linear Algebra
 Numerical Linear Algebra The two principal problems in linear algebra are: Linear system Given an n n matrix A and an n-vector b, determine x IR n such that A x = b Eigenvalue problem Given an n n matrix
Numerical Linear Algebra The two principal problems in linear algebra are: Linear system Given an n n matrix A and an n-vector b, determine x IR n such that A x = b Eigenvalue problem Given an n n matrix
COURSE Iterative methods for solving linear systems
 COURSE 0 4.3. Iterative methods for solving linear systems Because of round-off errors, direct methods become less efficient than iterative methods for large systems (>00 000 variables). An iterative scheme
COURSE 0 4.3. Iterative methods for solving linear systems Because of round-off errors, direct methods become less efficient than iterative methods for large systems (>00 000 variables). An iterative scheme
Solving Linear Systems
 Solving Linear Systems Iterative Solutions Methods Philippe B. Laval KSU Fall 2015 Philippe B. Laval (KSU) Linear Systems Fall 2015 1 / 12 Introduction We continue looking how to solve linear systems of
Solving Linear Systems Iterative Solutions Methods Philippe B. Laval KSU Fall 2015 Philippe B. Laval (KSU) Linear Systems Fall 2015 1 / 12 Introduction We continue looking how to solve linear systems of
Lecture Note 7: Iterative methods for solving linear systems. Xiaoqun Zhang Shanghai Jiao Tong University
 Lecture Note 7: Iterative methods for solving linear systems Xiaoqun Zhang Shanghai Jiao Tong University Last updated: December 24, 2014 1.1 Review on linear algebra Norms of vectors and matrices vector
Lecture Note 7: Iterative methods for solving linear systems Xiaoqun Zhang Shanghai Jiao Tong University Last updated: December 24, 2014 1.1 Review on linear algebra Norms of vectors and matrices vector
Hence a root lies between 1 and 2. Since f a is negative and f(x 0 ) is positive The root lies between a and x 0 i.e. 1 and 1.
 is positive The root lies between a and x 0 i.e. 1 and 1.") The Bisection method or BOLZANO s method or Interval halving method: Find the positive root of x 3 x = 1 correct to four decimal places by bisection method Let f x = x 3 x 1 Here f 0 = 1 = ve, f 1 = ve,
The Bisection method or BOLZANO s method or Interval halving method: Find the positive root of x 3 x = 1 correct to four decimal places by bisection method Let f x = x 3 x 1 Here f 0 = 1 = ve, f 1 = ve,
Chapter 2 - Linear Equations
 Chapter 2 - Linear Equations 2. Solving Linear Equations One of the most common problems in scientific computing is the solution of linear equations. It is a problem in its own right, but it also occurs
Chapter 2 - Linear Equations 2. Solving Linear Equations One of the most common problems in scientific computing is the solution of linear equations. It is a problem in its own right, but it also occurs
Solving Linear Systems of Equations
 Solving Linear Systems of Equations Gerald Recktenwald Portland State University Mechanical Engineering Department gerry@me.pdx.edu These slides are a supplement to the book Numerical Methods with Matlab:
Solving Linear Systems of Equations Gerald Recktenwald Portland State University Mechanical Engineering Department gerry@me.pdx.edu These slides are a supplement to the book Numerical Methods with Matlab:
Solving Linear Systems Using Gaussian Elimination. How can we solve
 Solving Linear Systems Using Gaussian Elimination How can we solve? 1 Gaussian elimination Consider the general augmented system: Gaussian elimination Step 1: Eliminate first column below the main diagonal.
Solving Linear Systems Using Gaussian Elimination How can we solve? 1 Gaussian elimination Consider the general augmented system: Gaussian elimination Step 1: Eliminate first column below the main diagonal.
April 26, Applied mathematics PhD candidate, physics MA UC Berkeley. Lecture 4/26/2013. Jed Duersch. Spd matrices. Cholesky decomposition
 Applied mathematics PhD candidate, physics MA UC Berkeley April 26, 2013 UCB 1/19 Symmetric positive-definite I Definition A symmetric matrix A R n n is positive definite iff x T Ax > 0 holds x 0 R n.
Applied mathematics PhD candidate, physics MA UC Berkeley April 26, 2013 UCB 1/19 Symmetric positive-definite I Definition A symmetric matrix A R n n is positive definite iff x T Ax > 0 holds x 0 R n.
LU Factorization. Marco Chiarandini. DM559 Linear and Integer Programming. Department of Mathematics & Computer Science University of Southern Denmark
 DM559 Linear and Integer Programming LU Factorization Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark [Based on slides by Lieven Vandenberghe, UCLA] Outline
DM559 Linear and Integer Programming LU Factorization Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark [Based on slides by Lieven Vandenberghe, UCLA] Outline
Linear Algebra and Matrix Inversion
 Jim Lambers MAT 46/56 Spring Semester 29- Lecture 2 Notes These notes correspond to Section 63 in the text Linear Algebra and Matrix Inversion Vector Spaces and Linear Transformations Matrices are much
Jim Lambers MAT 46/56 Spring Semester 29- Lecture 2 Notes These notes correspond to Section 63 in the text Linear Algebra and Matrix Inversion Vector Spaces and Linear Transformations Matrices are much
Computational Linear Algebra
 Computational Linear Algebra PD Dr. rer. nat. habil. Ralf Peter Mundani Computation in Engineering / BGU Scientific Computing in Computer Science / INF Winter Term 2017/18 Part 3: Iterative Methods PD
Computational Linear Algebra PD Dr. rer. nat. habil. Ralf Peter Mundani Computation in Engineering / BGU Scientific Computing in Computer Science / INF Winter Term 2017/18 Part 3: Iterative Methods PD
Gaussian Elimination and Back Substitution
 Jim Lambers MAT 610 Summer Session 2009-10 Lecture 4 Notes These notes correspond to Sections 31 and 32 in the text Gaussian Elimination and Back Substitution The basic idea behind methods for solving
Jim Lambers MAT 610 Summer Session 2009-10 Lecture 4 Notes These notes correspond to Sections 31 and 32 in the text Gaussian Elimination and Back Substitution The basic idea behind methods for solving
LU Factorization. LU Decomposition. LU Decomposition. LU Decomposition: Motivation A = LU
 LU Factorization To further improve the efficiency of solving linear systems Factorizations of matrix A : LU and QR LU Factorization Methods: Using basic Gaussian Elimination (GE) Factorization of Tridiagonal
LU Factorization To further improve the efficiency of solving linear systems Factorizations of matrix A : LU and QR LU Factorization Methods: Using basic Gaussian Elimination (GE) Factorization of Tridiagonal
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 5 Chapter 21 Numerical Differentiation PowerPoints organized by Dr. Michael R. Gustafson II, Duke University 1 All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 5 Chapter 21 Numerical Differentiation PowerPoints organized by Dr. Michael R. Gustafson II, Duke University 1 All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
5.7 Cramer's Rule 1. Using Determinants to Solve Systems Assumes the system of two equations in two unknowns
 5.7 Cramer's Rule 1. Using Determinants to Solve Systems Assumes the system of two equations in two unknowns (1) possesses the solution and provided that.. The numerators and denominators are recognized
5.7 Cramer's Rule 1. Using Determinants to Solve Systems Assumes the system of two equations in two unknowns (1) possesses the solution and provided that.. The numerators and denominators are recognized
1 Number Systems and Errors 1
 Contents 1 Number Systems and Errors 1 1.1 Introduction................................ 1 1.2 Number Representation and Base of Numbers............. 1 1.2.1 Normalized Floating-point Representation...........
Contents 1 Number Systems and Errors 1 1.1 Introduction................................ 1 1.2 Number Representation and Base of Numbers............. 1 1.2.1 Normalized Floating-point Representation...........
Matrix decompositions
 Matrix decompositions How can we solve Ax = b? 1 Linear algebra Typical linear system of equations : x 1 x +x = x 1 +x +9x = 0 x 1 +x x = The variables x 1, x, and x only appear as linear terms (no powers
Matrix decompositions How can we solve Ax = b? 1 Linear algebra Typical linear system of equations : x 1 x +x = x 1 +x +9x = 0 x 1 +x x = The variables x 1, x, and x only appear as linear terms (no powers
Linear Systems of n equations for n unknowns
 Linear Systems of n equations for n unknowns In many application problems we want to find n unknowns, and we have n linear equations Example: Find x,x,x such that the following three equations hold: x
Linear Systems of n equations for n unknowns In many application problems we want to find n unknowns, and we have n linear equations Example: Find x,x,x such that the following three equations hold: x
Numerical Methods I Non-Square and Sparse Linear Systems
 Numerical Methods I Non-Square and Sparse Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 25th, 2014 A. Donev (Courant
Numerical Methods I Non-Square and Sparse Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 25th, 2014 A. Donev (Courant
Numerical Linear Algebra
 Numerical Linear Algebra Decompositions, numerical aspects Gerard Sleijpen and Martin van Gijzen September 27, 2017 1 Delft University of Technology Program Lecture 2 LU-decomposition Basic algorithm Cost
Numerical Linear Algebra Decompositions, numerical aspects Gerard Sleijpen and Martin van Gijzen September 27, 2017 1 Delft University of Technology Program Lecture 2 LU-decomposition Basic algorithm Cost
Program Lecture 2. Numerical Linear Algebra. Gaussian elimination (2) Gaussian elimination. Decompositions, numerical aspects
 Gaussian elimination. Decompositions, numerical aspects") Numerical Linear Algebra Decompositions, numerical aspects Program Lecture 2 LU-decomposition Basic algorithm Cost Stability Pivoting Cholesky decomposition Sparse matrices and reorderings Gerard Sleijpen
Numerical Linear Algebra Decompositions, numerical aspects Program Lecture 2 LU-decomposition Basic algorithm Cost Stability Pivoting Cholesky decomposition Sparse matrices and reorderings Gerard Sleijpen
Introduction to Mathematical Programming
 Introduction to Mathematical Programming Ming Zhong Lecture 6 September 12, 2018 Ming Zhong (JHU) AMS Fall 2018 1 / 20 Table of Contents 1 Ming Zhong (JHU) AMS Fall 2018 2 / 20 Solving Linear Systems A
Introduction to Mathematical Programming Ming Zhong Lecture 6 September 12, 2018 Ming Zhong (JHU) AMS Fall 2018 1 / 20 Table of Contents 1 Ming Zhong (JHU) AMS Fall 2018 2 / 20 Solving Linear Systems A
14.2 QR Factorization with Column Pivoting
 page 531 Chapter 14 Special Topics Background Material Needed Vector and Matrix Norms (Section 25) Rounding Errors in Basic Floating Point Operations (Section 33 37) Forward Elimination and Back Substitution
page 531 Chapter 14 Special Topics Background Material Needed Vector and Matrix Norms (Section 25) Rounding Errors in Basic Floating Point Operations (Section 33 37) Forward Elimination and Back Substitution
Section 3.5 LU Decomposition (Factorization) Key terms. Matrix factorization Forward and back substitution LU-decomposition Storage economization
 Key terms. Matrix factorization Forward and back substitution LU-decomposition Storage economization") Section 3.5 LU Decomposition (Factorization) Key terms Matrix factorization Forward and back substitution LU-decomposition Storage economization In matrix analysis as implemented in modern software the
Section 3.5 LU Decomposition (Factorization) Key terms Matrix factorization Forward and back substitution LU-decomposition Storage economization In matrix analysis as implemented in modern software the
Pivoting. Reading: GV96 Section 3.4, Stew98 Chapter 3: 1.3
 Pivoting Reading: GV96 Section 3.4, Stew98 Chapter 3: 1.3 In the previous discussions we have assumed that the LU factorization of A existed and the various versions could compute it in a stable manner.
Pivoting Reading: GV96 Section 3.4, Stew98 Chapter 3: 1.3 In the previous discussions we have assumed that the LU factorization of A existed and the various versions could compute it in a stable manner.
Scientific Computing: Solving Linear Systems
 Scientific Computing: Solving Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 September 17th and 24th, 2015 A. Donev (Courant
Scientific Computing: Solving Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 September 17th and 24th, 2015 A. Donev (Courant
Department of Mathematics California State University, Los Angeles Master s Degree Comprehensive Examination in. NUMERICAL ANALYSIS Spring 2015
 Department of Mathematics California State University, Los Angeles Master s Degree Comprehensive Examination in NUMERICAL ANALYSIS Spring 2015 Instructions: Do exactly two problems from Part A AND two
Department of Mathematics California State University, Los Angeles Master s Degree Comprehensive Examination in NUMERICAL ANALYSIS Spring 2015 Instructions: Do exactly two problems from Part A AND two
Matrix decompositions
 Matrix decompositions How can we solve Ax = b? 1 Linear algebra Typical linear system of equations : x 1 x +x = x 1 +x +9x = 0 x 1 +x x = The variables x 1, x, and x only appear as linear terms (no powers
Matrix decompositions How can we solve Ax = b? 1 Linear algebra Typical linear system of equations : x 1 x +x = x 1 +x +9x = 0 x 1 +x x = The variables x 1, x, and x only appear as linear terms (no powers