Brief Review of Linear System Theory
|
|
|
- Jasper Jacobs
- 5 years ago
- Views:
Transcription
1 Brief Review of Liear Sytem heory he followig iformatio i typically covered i a coure o liear ytem theory. At ISU, EE 577 i oe uch coure ad i highly recommeded for power ytem egieerig tudet. We have developed a model that appear a x Ax We may write thi more compactly a where the i implied. x aig the LaPlace traform, with iitial coditio x0, we have: X x0 AX X AX x0 Factorig out the vector X reult i: I A X x0 where I i the idetity matrix of ame dimeio a A. Pre-multiplyig both ide by [I-A] -, we get: X L- ad taig the ivere-laplace traform lead to x t L I A x0 L-2a Note that i the above, by expreig [I-A] -, we implicitly aume that it i ivertible ad therefore o-igular thi require that our ytem ha o-zero determiat. Recall that a matrix ivere i the adjoit divided by the determiat, i.e., K - =AdjK/detK. Applyig thi to eq. L-, we have: Ax I A x0
2 2 he determiat of a matrix i a calar quatity, ad i thi cae, it i a calar polyomial i the LaPlace variable o that: 0... det a a a A I Such a polyomial may alway be factored i the form: L-2b where the, =,, are the root of the polyomial. herefore, L-3 Eq. L-3 expree the -dimeioal vector X a a fuctio of. he matrix Adj[I-A], 2. he vector x0 3. he factored polyomial Note that the umerator i the product of a matrix ad a vector ad therefore it i, which i the dimeio of the righthad-ide ad thu the vector X. hi i a it hould be, ice X i the vector of tate, ad there hould be tate. If oe of the root, =,, are repeated, it will be poible to ue partial fractio expaio to expre eq. L-3 i the followig way: L-4 0 det Adj x A I A I X det 2 0 a a a A I... 0 Adj 0 det Adj 2 x A I x A I A I X R... R R 2 2 X
3 where each R i a vector. he ivere LaPlace traform will the appear a: 2 x t R t e t R2 t e t... R t t e he, =,, are, i geeral, complex, uch that = +j. he, =,, are called the ytem eigevalue. We ee that the ytem eigevalue, =,, dictate the ature of the ytem i term of the ytem modal repoe, where each correpod to a ytem mode. hee mode may be ocillatory or o-ocillatory, damped or udamped.. Ocillatory: Ay mode with 0 i ocillatory. If there exit a = +j uch that 0, the there will exit a correpodig = -j. hee two eigevalue correpod to the ame ytem mode. Ay mode with =0 i o-ocillatory. 2. Dampig: Ay mode = j, a. if >0, the mode i egatively damped utable b. if <0, the mode i poitively damped table c. if =0, the mode i margially damped. If repeated root occur i the factorizatio of L-2b, the thee root will have time-domai expreio lie t r- e -λt, ad will therefore have the followig effect: a. if >0, the mode i egatively damped utable b. if <0, the mode i poitively damped table; however, the effect of the t coefficiet might iitially domiate the effect of the expoetial ad caue very large ocillatio that could dirupt the ytem. c. with =0, the effect of the t coefficiet will reult i growig repoe utable I practice, it i very uliely to ee repeated root for power ytem. herefore, we afely aume there are o repeated root. 3
4 Right eigevector: For each eigevalue,, =,,, there exit a -elemet colum vector p, called a right eigevector, uch that Ap p Sice there are eigevalue, there are right eigevector. We may form a matrix of thee right eigevector a follow: P p... p he above matrix, P, i called the modal matrix. Left eigevector: For each eigevalue,, =,,, there exit a -elemet colum vector q, called a left eigevector, uch that Sice there are eigevalue, there are left eigevector. We may form a matrix of thee left eigevector a follow: Q q q Some propertie: For ay two eigevalue, j,, the For j, q j ad p are orthogoal, i.e., their dot product i 0: For j=, q A q q q p j p j j 0 c where c j i a cotat. A imple calig of either the right or the left eigevector will provide that q j p j j 4
5 Now coider, baed o the above propertie, we will get: q p q p q p... q p q p q q p q p q p... q p 0 q p Q P p... p q p q p q p... q p 0 0 q p q q p q p q p... q p q p We ca go a tep further if the calig i performed: Q Pot-multiplyig both ide by P - reult i Q P I P Note that: PP - =I [Q ] - Q =I We ca illutrate calculatio of the right ad left eigevector uig the ample ytem give i the boo fig. 2.9, ad example 3.2, havig tate-pace model of Oberve the eigevalue i able
6 Alo oberve the relative rotor agle plot of fig. 3.3-b, for the cae whe a mall load wa added to bu #8. Here we ee that oe mode ca be clearly oberved havig a period of about 0.7 ec f=.4hz, ω=2πf=8.8 rad/ec. he other mode 2.Hz i ot readily obervable, although it preece i probably repoible for the ditortio ee i the 3 plot. Uig matlab, we ue [P,D]=eigA where A i the matrix give above. 6
7 he the matrix of eigevalue D i give by i i i i Ad the matrix of right eigevector P i give by i i i i i i i i i i i i i i i i Ad the matrix of left eigevector Q i give by P -, which i: i i i i i i i i i i i i i i i i Note that here, the eigevector are alog the row. aig trapoe, we get Q, which i i i i i i i i i i i i i i i i i I the above, the left eigevector are the colum. Note alo that the colum of right or left eigevector correpodig to complex cojugate eigevalue are complex cojugate eigevector. he umerator of eq. L-4 Let retur to eq. L-4, which i retated here for coveiece: R R 2 R X
![What are thee R, =,,? o awer thi, let retur to eq. L-, which i: Let pre-multiple the right-had ide by PP - ad pot-multiply the right-had-ide by [Q ] - Q.](/docs-images/95/125502409/images/8-0.jpg "hi i acceptable, ice both of thee product yield the idetity.")
8 What are thee R, =,,? o awer thi, let retur to eq. L-, which i: Let pre-multiple the right-had ide by PP - ad pot-multiply the right-had-ide by [Q ] - Q. hi i acceptable, ice both of thee product yield the idetity. hi reult i: X PP Bracet the ier product: We ca how that: where he proof i below: X X P P I A x0 I A Q Q x0 Q x0 I A Q I P I A Q diag he, we have that: 8
9 X P I Q x 9 0 *# wo commet are relevat at thi poit:. he matrix beig iverted i a diagoal matrix. herefore, the matrix ivere i obtaied by ivertig each diagoal elemet. 2. Recall the orthogoality property p i q j =0 for i j. Uig thee commet, we ca maipulate *# to obtai: X p q x 0 q x0 p aig the ivere LaPlace traform, we obtai: x t t q x0 e p L-5 hi i a very importat relatiohip. It how how we ca ue the right eigevalue to determie the hape of the th mode. Ipectig eq. L-5, we ee that the right eigevector p determie the relative ditributio of the mode through the tate variable. o ee thi, ote that q, p, ad xt are all vector, with elemet i correpodig to the i th tate variable. q x t i calar ad multiplie every elemet of p ; 0 e therefore it doe ot ditiguih ay tate differetly tha aother tate p i therefore the oly thig that ditiguihe oe tate from aother i term of the mode dyamic. If the tate are limited to oly the geerator iertial tate ad, the each elemet of p give the relative ditributio of the mode i a particular geerator agle or peed. Oe cautio: he right eigevector doe NO tell you how much the tate ifluece the mode.
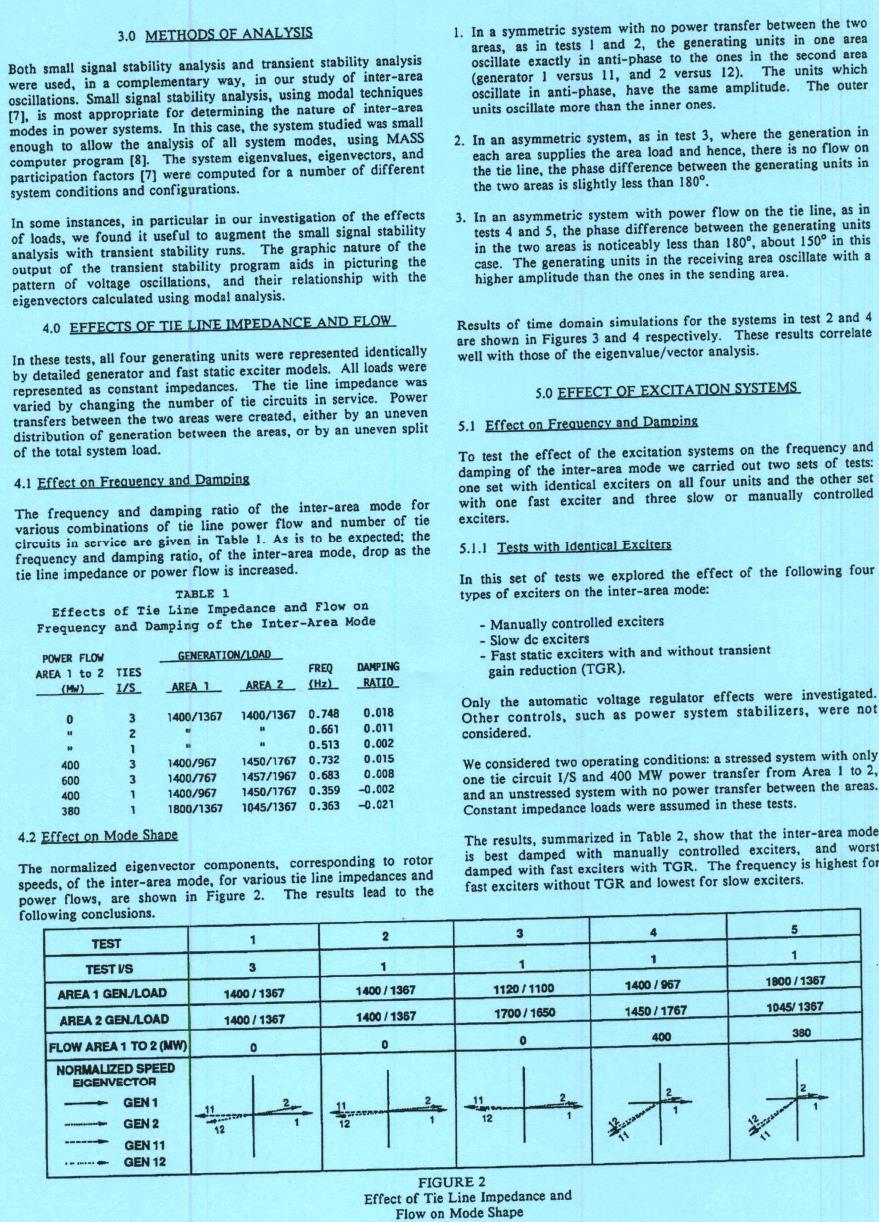
10 he right eigevector doe tell you the relative phae of each tate i that mode. If you plot each elemet a complex umber ad thu iterpretable a a vector correpodig to each tate oe for each geerator i the right eigevector p, you ca ee which geerator are wigig agait oe aother. hi i called mode hape. he relative phae ca be oberved i the time domai imulatio. Some iteretig way of illutratig the relative phae of each a determied by the p are how i the followig. Klei, Roger, ad Kudur, A fudametal tudy of iterarea ocillatio i power ytem. See page 95-96, attached below. Fig. 2 how the mode hape where ge,2 wig agait ge,2, ad i the time domai imulatio, Fig. 3. 0
11

12 Wag, Howell, Kudur, Chug, ad Xu, A tool for mall-igal ecurity aemet of power ytem. See mode hape, Fig. 5. 2

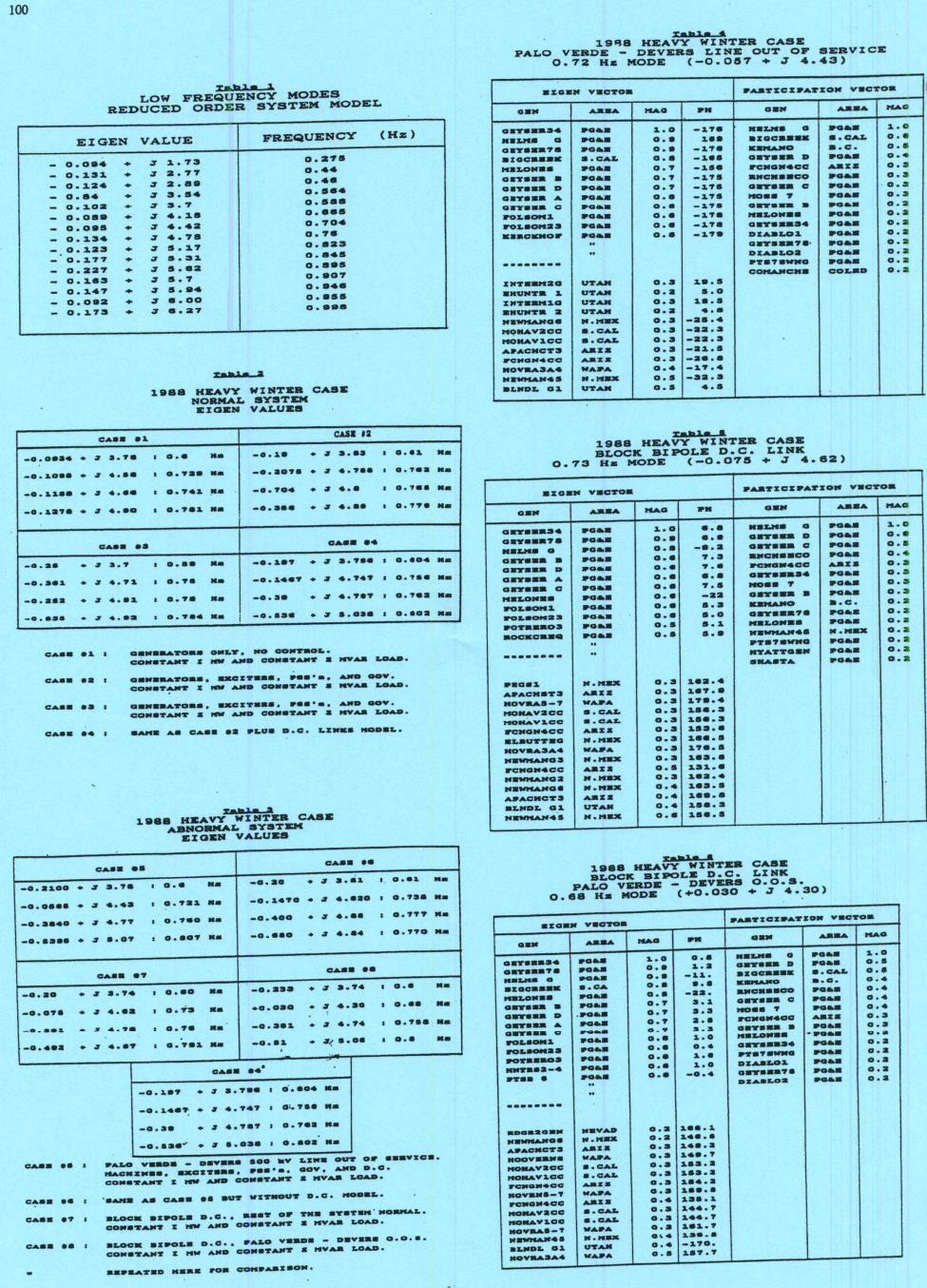
13 Y. Maour, Applicatio of eigeaalyi to the Weter North America Power ytem, able 4, 5, ad 6, each table for a certai coditio, give eigevector elemet for peed deviatio at each of a umber of geerator. Figure, 2, ad 3 how, for three coditio, geographical plot of the mode hape for 4 differet mode. 3
14 4

15 Fially, below i ome wor recetly doe reflectig mode hape i the Southweter WECC ytem for a certai mode. 5

16 6
State space systems analysis
 State pace ytem aalyi Repreetatio of a ytem i tate-pace (tate-pace model of a ytem To itroduce the tate pace formalim let u tart with a eample i which the ytem i dicuio i a imple electrical circuit with
State pace ytem aalyi Repreetatio of a ytem i tate-pace (tate-pace model of a ytem To itroduce the tate pace formalim let u tart with a eample i which the ytem i dicuio i a imple electrical circuit with
ECE 422 Power System Operations & Planning 6 Small Signal Stability. Spring 2015 Instructor: Kai Sun
 ECE 4 Power Sytem Operatio & Plaig 6 Small Sigal Stability Sprig 15 Itructor: Kai Su 1 Referece Saadat Chapter 11.4 EPRI Tutorial Chapter 8 Power Ocillatio Kudur Chapter 1 Power Ocillatio The power ytem
ECE 4 Power Sytem Operatio & Plaig 6 Small Sigal Stability Sprig 15 Itructor: Kai Su 1 Referece Saadat Chapter 11.4 EPRI Tutorial Chapter 8 Power Ocillatio Kudur Chapter 1 Power Ocillatio The power ytem
ELEC 372 LECTURE NOTES, WEEK 4 Dr. Amir G. Aghdam Concordia University
 ELEC 37 LECTURE NOTES, WEE 4 Dr Amir G Aghdam Cocordia Uiverity Part of thee ote are adapted from the material i the followig referece: Moder Cotrol Sytem by Richard C Dorf ad Robert H Bihop, Pretice Hall
ELEC 37 LECTURE NOTES, WEE 4 Dr Amir G Aghdam Cocordia Uiverity Part of thee ote are adapted from the material i the followig referece: Moder Cotrol Sytem by Richard C Dorf ad Robert H Bihop, Pretice Hall
Fig. 1: Streamline coordinates
 1 Equatio of Motio i Streamlie Coordiate Ai A. Soi, MIT 2.25 Advaced Fluid Mechaic Euler equatio expree the relatiohip betwee the velocity ad the preure field i ivicid flow. Writte i term of treamlie coordiate,
1 Equatio of Motio i Streamlie Coordiate Ai A. Soi, MIT 2.25 Advaced Fluid Mechaic Euler equatio expree the relatiohip betwee the velocity ad the preure field i ivicid flow. Writte i term of treamlie coordiate,
Lecture 30: Frequency Response of Second-Order Systems
 Lecture 3: Frequecy Repoe of Secod-Order Sytem UHTXHQF\ 5HVSRQVH RI 6HFRQGUGHU 6\VWHPV A geeral ecod-order ytem ha a trafer fuctio of the form b + b + b H (. (9.4 a + a + a It ca be table, utable, caual
Lecture 3: Frequecy Repoe of Secod-Order Sytem UHTXHQF\ 5HVSRQVH RI 6HFRQGUGHU 6\VWHPV A geeral ecod-order ytem ha a trafer fuctio of the form b + b + b H (. (9.4 a + a + a It ca be table, utable, caual
CONTROL SYSTEMS. Chapter 7 : Bode Plot. 40dB/dec 1.0. db/dec so resultant slope will be 20 db/dec and this is due to the factor s
 CONTROL SYSTEMS Chapter 7 : Bode Plot GATE Objective & Numerical Type Solutio Quetio 6 [Practice Book] [GATE EE 999 IIT-Bombay : 5 Mark] The aymptotic Bode plot of the miimum phae ope-loop trafer fuctio
CONTROL SYSTEMS Chapter 7 : Bode Plot GATE Objective & Numerical Type Solutio Quetio 6 [Practice Book] [GATE EE 999 IIT-Bombay : 5 Mark] The aymptotic Bode plot of the miimum phae ope-loop trafer fuctio
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 30 Sigal & Sytem Prof. Mark Fowler Note Set #8 C-T Sytem: Laplace Traform Solvig Differetial Equatio Readig Aigmet: Sectio 6.4 of Kame ad Heck / Coure Flow Diagram The arrow here how coceptual flow
EECE 30 Sigal & Sytem Prof. Mark Fowler Note Set #8 C-T Sytem: Laplace Traform Solvig Differetial Equatio Readig Aigmet: Sectio 6.4 of Kame ad Heck / Coure Flow Diagram The arrow here how coceptual flow
STRONG DEVIATION THEOREMS FOR THE SEQUENCE OF CONTINUOUS RANDOM VARIABLES AND THE APPROACH OF LAPLACE TRANSFORM
 Joural of Statitic: Advace i Theory ad Applicatio Volume, Number, 9, Page 35-47 STRONG DEVIATION THEORES FOR THE SEQUENCE OF CONTINUOUS RANDO VARIABLES AND THE APPROACH OF LAPLACE TRANSFOR School of athematic
Joural of Statitic: Advace i Theory ad Applicatio Volume, Number, 9, Page 35-47 STRONG DEVIATION THEORES FOR THE SEQUENCE OF CONTINUOUS RANDO VARIABLES AND THE APPROACH OF LAPLACE TRANSFOR School of athematic
Time Response. First Order Systems. Time Constant, T c We call 1/a the time constant of the response. Chapter 4 Time Response
 Time Repoe Chapter 4 Time Repoe Itroductio The output repoe of a ytem i the um of two repoe: the forced repoe ad the atural repoe. Although may techique, uch a olvig a differetial equatio or takig the
Time Repoe Chapter 4 Time Repoe Itroductio The output repoe of a ytem i the um of two repoe: the forced repoe ad the atural repoe. Although may techique, uch a olvig a differetial equatio or takig the
Statistical Inference Procedures
 Statitical Iferece Procedure Cofidece Iterval Hypothei Tet Statitical iferece produce awer to pecific quetio about the populatio of iteret baed o the iformatio i a ample. Iferece procedure mut iclude a
Statitical Iferece Procedure Cofidece Iterval Hypothei Tet Statitical iferece produce awer to pecific quetio about the populatio of iteret baed o the iformatio i a ample. Iferece procedure mut iclude a
Société de Calcul Mathématique, S. A. Algorithmes et Optimisation
 Société de Calcul Mathématique S A Algorithme et Optimiatio Radom amplig of proportio Berard Beauzamy Jue 2008 From time to time we fid a problem i which we do ot deal with value but with proportio For
Société de Calcul Mathématique S A Algorithme et Optimiatio Radom amplig of proportio Berard Beauzamy Jue 2008 From time to time we fid a problem i which we do ot deal with value but with proportio For
STUDENT S t-distribution AND CONFIDENCE INTERVALS OF THE MEAN ( )
") STUDENT S t-distribution AND CONFIDENCE INTERVALS OF THE MEAN Suppoe that we have a ample of meaured value x1, x, x3,, x of a igle uow quatity. Aumig that the meauremet are draw from a ormal ditributio
STUDENT S t-distribution AND CONFIDENCE INTERVALS OF THE MEAN Suppoe that we have a ample of meaured value x1, x, x3,, x of a igle uow quatity. Aumig that the meauremet are draw from a ormal ditributio
ECEN620: Network Theory Broadband Circuit Design Fall 2014
 ECE60: etwork Theory Broadbad Circuit Deig Fall 04 Lecture 3: PLL Aalyi Sam Palermo Aalog & Mixed-Sigal Ceter Texa A&M Uiverity Ageda & Readig PLL Overview & Applicatio PLL Liear Model Phae & Frequecy
ECE60: etwork Theory Broadbad Circuit Deig Fall 04 Lecture 3: PLL Aalyi Sam Palermo Aalog & Mixed-Sigal Ceter Texa A&M Uiverity Ageda & Readig PLL Overview & Applicatio PLL Liear Model Phae & Frequecy
u t u 0 ( 7) Intuitively, the maximum principles can be explained by the following observation. Recall
 Intuitively, the maximum principles can be explained by the following observation. Recall") Oct. Heat Equatio M aximum priciple I thi lecture we will dicu the maximum priciple ad uiquee of olutio for the heat equatio.. Maximum priciple. The heat equatio alo ejoy maximum priciple a the Laplace
Oct. Heat Equatio M aximum priciple I thi lecture we will dicu the maximum priciple ad uiquee of olutio for the heat equatio.. Maximum priciple. The heat equatio alo ejoy maximum priciple a the Laplace
x z Increasing the size of the sample increases the power (reduces the probability of a Type II error) when the significance level remains fixed.
 when the significance level remains fixed.") ] z-tet for the mea, μ If the P-value i a mall or maller tha a pecified value, the data are tatitically igificat at igificace level. Sigificace tet for the hypothei H 0: = 0 cocerig the ukow mea of a populatio
] z-tet for the mea, μ If the P-value i a mall or maller tha a pecified value, the data are tatitically igificat at igificace level. Sigificace tet for the hypothei H 0: = 0 cocerig the ukow mea of a populatio
Comments on Discussion Sheet 18 and Worksheet 18 ( ) An Introduction to Hypothesis Testing
 An Introduction to Hypothesis Testing") Commet o Dicuio Sheet 18 ad Workheet 18 ( 9.5-9.7) A Itroductio to Hypothei Tetig Dicuio Sheet 18 A Itroductio to Hypothei Tetig We have tudied cofidece iterval for a while ow. Thee are method that allow
Commet o Dicuio Sheet 18 ad Workheet 18 ( 9.5-9.7) A Itroductio to Hypothei Tetig Dicuio Sheet 18 A Itroductio to Hypothei Tetig We have tudied cofidece iterval for a while ow. Thee are method that allow
Introduction to Control Systems
 Itroductio to Cotrol Sytem CLASSIFICATION OF MATHEMATICAL MODELS Icreaig Eae of Aalyi Static Icreaig Realim Dyamic Determiitic Stochatic Lumped Parameter Ditributed Parameter Liear Noliear Cotat Coefficiet
Itroductio to Cotrol Sytem CLASSIFICATION OF MATHEMATICAL MODELS Icreaig Eae of Aalyi Static Icreaig Realim Dyamic Determiitic Stochatic Lumped Parameter Ditributed Parameter Liear Noliear Cotat Coefficiet
Erick L. Oberstar Fall 2001 Project: Sidelobe Canceller & GSC 1. Advanced Digital Signal Processing Sidelobe Canceller (Beam Former)
") Erick L. Obertar Fall 001 Project: Sidelobe Caceller & GSC 1 Advaced Digital Sigal Proceig Sidelobe Caceller (Beam Former) Erick L. Obertar 001 Erick L. Obertar Fall 001 Project: Sidelobe Caceller & GSC
Erick L. Obertar Fall 001 Project: Sidelobe Caceller & GSC 1 Advaced Digital Sigal Proceig Sidelobe Caceller (Beam Former) Erick L. Obertar 001 Erick L. Obertar Fall 001 Project: Sidelobe Caceller & GSC
1it is said to be overdamped. When 1, the roots of
 Homework 3 AERE573 Fall 8 Due /8(M) SOLUTIO PROBLEM (4pt) Coider a D order uderdamped tem trafer fuctio H( ) ratio The deomiator i the tem characteritic polomial P( ) (a)(5pt) Ue the quadratic formula,
Homework 3 AERE573 Fall 8 Due /8(M) SOLUTIO PROBLEM (4pt) Coider a D order uderdamped tem trafer fuctio H( ) ratio The deomiator i the tem characteritic polomial P( ) (a)(5pt) Ue the quadratic formula,
Applied Mathematical Sciences, Vol. 9, 2015, no. 3, HIKARI Ltd,
 Applied Mathematical Sciece Vol 9 5 o 3 7 - HIKARI Ltd wwwm-hiaricom http://dxdoiorg/988/am54884 O Poitive Defiite Solutio of the Noliear Matrix Equatio * A A I Saa'a A Zarea* Mathematical Sciece Departmet
Applied Mathematical Sciece Vol 9 5 o 3 7 - HIKARI Ltd wwwm-hiaricom http://dxdoiorg/988/am54884 O Poitive Defiite Solutio of the Noliear Matrix Equatio * A A I Saa'a A Zarea* Mathematical Sciece Departmet
The Performance of Feedback Control Systems
 The Performace of Feedbac Cotrol Sytem Objective:. Secify the meaure of erformace time-domai the firt te i the deig roce Percet overhoot / Settlig time T / Time to rie / Steady-tate error e. ut igal uch
The Performace of Feedbac Cotrol Sytem Objective:. Secify the meaure of erformace time-domai the firt te i the deig roce Percet overhoot / Settlig time T / Time to rie / Steady-tate error e. ut igal uch
EE 508 Lecture 6. Dead Networks Scaling, Normalization and Transformations
 EE 508 Lecture 6 Dead Network Scalig, Normalizatio ad Traformatio Filter Cocept ad Termiology 2-d order polyomial characterizatio Biquadratic Factorizatio Op Amp Modelig Stability ad Itability Roll-off
EE 508 Lecture 6 Dead Network Scalig, Normalizatio ad Traformatio Filter Cocept ad Termiology 2-d order polyomial characterizatio Biquadratic Factorizatio Op Amp Modelig Stability ad Itability Roll-off
Assignment 1 - Solutions. ECSE 420 Parallel Computing Fall November 2, 2014
 Aigmet - Solutio ECSE 420 Parallel Computig Fall 204 ovember 2, 204. (%) Decribe briefly the followig term, expoe their caue, ad work-aroud the idutry ha udertake to overcome their coequece: (i) Memory
Aigmet - Solutio ECSE 420 Parallel Computig Fall 204 ovember 2, 204. (%) Decribe briefly the followig term, expoe their caue, ad work-aroud the idutry ha udertake to overcome their coequece: (i) Memory
CALCULATION OF FIBONACCI VECTORS
 CALCULATION OF FIBONACCI VECTORS Stuart D. Aderso Departmet of Physics, Ithaca College 953 Daby Road, Ithaca NY 14850, USA email: saderso@ithaca.edu ad Dai Novak Departmet of Mathematics, Ithaca College
CALCULATION OF FIBONACCI VECTORS Stuart D. Aderso Departmet of Physics, Ithaca College 953 Daby Road, Ithaca NY 14850, USA email: saderso@ithaca.edu ad Dai Novak Departmet of Mathematics, Ithaca College
8.6 Order-Recursive LS s[n]
![8.6 Order-Recursive LS s[n]](/thumbs/72/67606323.jpg "8.6 Order-Recursive LS s[n]") 8.6 Order-Recurive LS [] Motivate ti idea wit Curve Fittig Give data: 0,,,..., - [0], [],..., [-] Wat to fit a polyomial to data.., but wic oe i te rigt model?! Cotat! Quadratic! Liear! Cubic, Etc. ry
8.6 Order-Recurive LS [] Motivate ti idea wit Curve Fittig Give data: 0,,,..., - [0], [],..., [-] Wat to fit a polyomial to data.., but wic oe i te rigt model?! Cotat! Quadratic! Liear! Cubic, Etc. ry
LECTURE 13 SIMULTANEOUS EQUATIONS
 NOVEMBER 5, 26 Demad-upply ytem LETURE 3 SIMULTNEOUS EQUTIONS I thi lecture, we dicu edogeeity problem that arie due to imultaeity, i.e. the left-had ide variable ad ome of the right-had ide variable are
NOVEMBER 5, 26 Demad-upply ytem LETURE 3 SIMULTNEOUS EQUTIONS I thi lecture, we dicu edogeeity problem that arie due to imultaeity, i.e. the left-had ide variable ad ome of the right-had ide variable are
a 1 = 1 a a a a n n s f() s = Σ log a 1 + a a n log n sup log a n+1 + a n+2 + a n+3 log n sup () s = an /n s s = + t i
 s = Σ log a 1 + a a n log n sup log a n+1 + a n+2 + a n+3 log n sup () s = an /n s s = + t i") 0 Dirichlet Serie & Logarithmic Power Serie. Defiitio & Theorem Defiitio.. (Ordiary Dirichlet Serie) Whe,a,,3, are complex umber, we call the followig Ordiary Dirichlet Serie. f() a a a a 3 3 a 4 4 Note
0 Dirichlet Serie & Logarithmic Power Serie. Defiitio & Theorem Defiitio.. (Ordiary Dirichlet Serie) Whe,a,,3, are complex umber, we call the followig Ordiary Dirichlet Serie. f() a a a a 3 3 a 4 4 Note
SOLUTION: The 95% confidence interval for the population mean µ is x ± t 0.025; 49
 C22.0103 Sprig 2011 Homework 7 olutio 1. Baed o a ample of 50 x-value havig mea 35.36 ad tadard deviatio 4.26, fid a 95% cofidece iterval for the populatio mea. SOLUTION: The 95% cofidece iterval for the
C22.0103 Sprig 2011 Homework 7 olutio 1. Baed o a ample of 50 x-value havig mea 35.36 ad tadard deviatio 4.26, fid a 95% cofidece iterval for the populatio mea. SOLUTION: The 95% cofidece iterval for the
1. (a) If u (I : R J), there exists c 0 in R such that for all q 0, cu q (I : R J) [q] I [q] : R J [q]. Hence, if j J, for all q 0, j q (cu q ) =
![1. (a) If u (I : R J), there exists c 0 in R such that for all q 0, cu q (I : R J) [q] I [q] : R J [q]. Hence, if j J, for all q 0, j q (cu q ) =](/thumbs/82/85612182.jpg "1. (a) If u (I : R J), there exists c 0 in R such that for all q 0, cu q (I : R J) [q] I [q] : R J [q]. Hence, if j J, for all q 0, j q (cu q ) =") Math 615, Witer 2016 Problem Set #5 Solutio 1. (a) If u (I : R J), there exit c 0 i R uch that for all q 0, cu q (I : R J) [q] I [q] : R J [q]. Hece, if j J, for all q 0, j q (cu q ) = c(ju) q I [q], o
Math 615, Witer 2016 Problem Set #5 Solutio 1. (a) If u (I : R J), there exit c 0 i R uch that for all q 0, cu q (I : R J) [q] I [q] : R J [q]. Hece, if j J, for all q 0, j q (cu q ) = c(ju) q I [q], o
Dorf, R.C., Wan, Z., Johnson, D.E. Laplace Transform The Electrical Engineering Handbook Ed. Richard C. Dorf Boca Raton: CRC Press LLC, 2000
 Dorf, R.C., Wa, Z., Joho, D.E. Laplace Traform The Electrical Egieerig Hadbook Ed. Richard C. Dorf Boca Rato: CRC Pre LLC, 6 Laplace Traform Richard C. Dorf Uiverity of Califoria, Davi Zhe Wa Uiverity
Dorf, R.C., Wa, Z., Joho, D.E. Laplace Traform The Electrical Egieerig Hadbook Ed. Richard C. Dorf Boca Rato: CRC Pre LLC, 6 Laplace Traform Richard C. Dorf Uiverity of Califoria, Davi Zhe Wa Uiverity
ECE 522 Power Systems Analysis II 3.2 Small Signal Stability
 ECE 5 Power Sytem Aalyi II 3. Small Sigal Stability Sprig 18 Itructor: Kai Su 1 Cotet 3..1 Small igal tability overview ad aalyi method 3.. Small igal tability ehacemet Referece: EPRI Dyamic Tutorial Chapter
ECE 5 Power Sytem Aalyi II 3. Small Sigal Stability Sprig 18 Itructor: Kai Su 1 Cotet 3..1 Small igal tability overview ad aalyi method 3.. Small igal tability ehacemet Referece: EPRI Dyamic Tutorial Chapter
Chapter 1 Econometrics
 Chapter Ecoometric There are o exercie or applicatio i Chapter. 0 Pearo Educatio, Ic. Publihig a Pretice Hall Chapter The Liear Regreio Model There are o exercie or applicatio i Chapter. 0 Pearo Educatio,
Chapter Ecoometric There are o exercie or applicatio i Chapter. 0 Pearo Educatio, Ic. Publihig a Pretice Hall Chapter The Liear Regreio Model There are o exercie or applicatio i Chapter. 0 Pearo Educatio,
System Control. Lesson #19a. BME 333 Biomedical Signals and Systems - J.Schesser
 Sytem Cotrol Leo #9a 76 Sytem Cotrol Baic roblem Say you have a ytem which you ca ot alter but it repoe i ot optimal Example Motor cotrol for exokeleto Robotic cotrol roblem that ca occur Utable Traiet
Sytem Cotrol Leo #9a 76 Sytem Cotrol Baic roblem Say you have a ytem which you ca ot alter but it repoe i ot optimal Example Motor cotrol for exokeleto Robotic cotrol roblem that ca occur Utable Traiet
MATH10212 Linear Algebra B Proof Problems
 MATH22 Liear Algebra Proof Problems 5 Jue 26 Each problem requests a proof of a simple statemet Problems placed lower i the list may use the results of previous oes Matrices ermiats If a b R the matrix
MATH22 Liear Algebra Proof Problems 5 Jue 26 Each problem requests a proof of a simple statemet Problems placed lower i the list may use the results of previous oes Matrices ermiats If a b R the matrix
10-716: Advanced Machine Learning Spring Lecture 13: March 5
 10-716: Advaced Machie Learig Sprig 019 Lecture 13: March 5 Lecturer: Pradeep Ravikumar Scribe: Charvi Ratogi, Hele Zhou, Nicholay opi Note: Lae template courtey of UC Berkeley EECS dept. Diclaimer: hee
10-716: Advaced Machie Learig Sprig 019 Lecture 13: March 5 Lecturer: Pradeep Ravikumar Scribe: Charvi Ratogi, Hele Zhou, Nicholay opi Note: Lae template courtey of UC Berkeley EECS dept. Diclaimer: hee
Explicit scheme. Fully implicit scheme Notes. Fully implicit scheme Notes. Fully implicit scheme Notes. Notes
 Explicit cheme So far coidered a fully explicit cheme to umerically olve the diffuio equatio: T + = ( )T + (T+ + T ) () with = κ ( x) Oly table for < / Thi cheme i ometime referred to a FTCS (forward time
Explicit cheme So far coidered a fully explicit cheme to umerically olve the diffuio equatio: T + = ( )T + (T+ + T ) () with = κ ( x) Oly table for < / Thi cheme i ometime referred to a FTCS (forward time
Properties and Tests of Zeros of Polynomial Functions
 Properties ad Tests of Zeros of Polyomial Fuctios The Remaider ad Factor Theorems: Sythetic divisio ca be used to fid the values of polyomials i a sometimes easier way tha substitutio. This is show by
Properties ad Tests of Zeros of Polyomial Fuctios The Remaider ad Factor Theorems: Sythetic divisio ca be used to fid the values of polyomials i a sometimes easier way tha substitutio. This is show by
CONTROL ENGINEERING LABORATORY
 Uiverity of Techology Departmet of Electrical Egieerig Cotrol Egieerig Lab. CONTROL ENGINEERING LABORATORY By Dr. Abdul. Rh. Humed M.Sc. Quay Salim Tawfeeq M.Sc. Nihad Mohammed Amee M.Sc. Waleed H. Habeeb
Uiverity of Techology Departmet of Electrical Egieerig Cotrol Egieerig Lab. CONTROL ENGINEERING LABORATORY By Dr. Abdul. Rh. Humed M.Sc. Quay Salim Tawfeeq M.Sc. Nihad Mohammed Amee M.Sc. Waleed H. Habeeb
Heat Equation: Maximum Principles
 Heat Equatio: Maximum Priciple Nov. 9, 0 I thi lecture we will dicu the maximum priciple ad uiquee of olutio for the heat equatio.. Maximum priciple. The heat equatio alo ejoy maximum priciple a the Laplace
Heat Equatio: Maximum Priciple Nov. 9, 0 I thi lecture we will dicu the maximum priciple ad uiquee of olutio for the heat equatio.. Maximum priciple. The heat equatio alo ejoy maximum priciple a the Laplace
Apply change-of-basis formula to rewrite x as a linear combination of eigenvectors v j.
 Eigevalue-Eigevector Istructor: Nam Su Wag eigemcd Ay vector i real Euclidea space of dimesio ca be uiquely epressed as a liear combiatio of liearly idepedet vectors (ie, basis) g j, j,,, α g α g α g α
Eigevalue-Eigevector Istructor: Nam Su Wag eigemcd Ay vector i real Euclidea space of dimesio ca be uiquely epressed as a liear combiatio of liearly idepedet vectors (ie, basis) g j, j,,, α g α g α g α
Hidden Markov Model Parameters
 .PPT 5/04/00 Lecture 6 HMM Traiig Traiig Hidde Markov Model Iitial model etimate Viterbi traiig Baum-Welch traiig 8.7.PPT 5/04/00 8.8 Hidde Markov Model Parameter c c c 3 a a a 3 t t t 3 c a t A Hidde
.PPT 5/04/00 Lecture 6 HMM Traiig Traiig Hidde Markov Model Iitial model etimate Viterbi traiig Baum-Welch traiig 8.7.PPT 5/04/00 8.8 Hidde Markov Model Parameter c c c 3 a a a 3 t t t 3 c a t A Hidde
} = 0 [ III-2b ] [ ] a exp [ i k r. [ ] a t. { } n, a r. ( ) = i ˆ. ( ) = i. ( ) exp i r. a exp i k r. a, etc...
![} = 0 [ III-2b ] [ ] a exp [ i k r. [ ] a t. { } n, a r. ( ) = i ˆ. ( ) = i. ( ) exp i r. a exp i k r. a, etc...](/thumbs/96/127082534.jpg "} = 0 [ III-2b ] [ ] a exp [ i k r. [ ] a t. { } n, a r. ( ) = i ˆ. ( ) = i. ( ) exp i r. a exp i k r. a, etc...") THE INTERACTION OF RADIATION AND MATTER: QUANTUM THEORY PAGE 19 III. REPRESENTATIONS OF PHOTON STATES 1. Fock or Number State:. 11 A we have ee, the Fock or umber tate { } r k σ r k σ [ III-1 ] are complete
THE INTERACTION OF RADIATION AND MATTER: QUANTUM THEORY PAGE 19 III. REPRESENTATIONS OF PHOTON STATES 1. Fock or Number State:. 11 A we have ee, the Fock or umber tate { } r k σ r k σ [ III-1 ] are complete
Last time: Completed solution to the optimum linear filter in real-time operation
 6.3 tochatic Etimatio ad Cotrol, Fall 4 ecture at time: Completed olutio to the oimum liear filter i real-time operatio emi-free cofiguratio: t D( p) F( p) i( p) dte dp e π F( ) F( ) ( ) F( p) ( p) 4444443
6.3 tochatic Etimatio ad Cotrol, Fall 4 ecture at time: Completed olutio to the oimum liear filter i real-time operatio emi-free cofiguratio: t D( p) F( p) i( p) dte dp e π F( ) F( ) ( ) F( p) ( p) 4444443
Isolated Word Recogniser
 Lecture 5 Iolated Word Recogitio Hidde Markov Model of peech State traitio ad aligmet probabilitie Searchig all poible aligmet Dyamic Programmig Viterbi Aligmet Iolated Word Recogitio 8. Iolated Word Recogier
Lecture 5 Iolated Word Recogitio Hidde Markov Model of peech State traitio ad aligmet probabilitie Searchig all poible aligmet Dyamic Programmig Viterbi Aligmet Iolated Word Recogitio 8. Iolated Word Recogier
MASSACHUSETTS INSTITUTE OF TECHNOLOGY 6.265/15.070J Fall 2013 Lecture 16 11/04/2013. Ito integral. Properties
 MASSACHUSES INSIUE OF ECHNOLOGY 6.65/15.7J Fall 13 Lecture 16 11/4/13 Ito itegral. Propertie Cotet. 1. Defiitio of Ito itegral. Propertie of Ito itegral 1 Ito itegral. Exitece We cotiue with the cotructio
MASSACHUSES INSIUE OF ECHNOLOGY 6.65/15.7J Fall 13 Lecture 16 11/4/13 Ito itegral. Propertie Cotet. 1. Defiitio of Ito itegral. Propertie of Ito itegral 1 Ito itegral. Exitece We cotiue with the cotructio
MAT 271 Project: Partial Fractions for certain rational functions
 MAT 7 Project: Partial Fractios for certai ratioal fuctios Prerequisite kowledge: partial fractios from MAT 7, a very good commad of factorig ad complex umbers from Precalculus. To complete this project,
MAT 7 Project: Partial Fractios for certai ratioal fuctios Prerequisite kowledge: partial fractios from MAT 7, a very good commad of factorig ad complex umbers from Precalculus. To complete this project,
Notes The Incremental Motion Model:
 The Icremetal Motio Model: The Jacobia Matrix I the forward kiematics model, we saw that it was possible to relate joit agles θ, to the cofiguratio of the robot ed effector T I this sectio, we will see
The Icremetal Motio Model: The Jacobia Matrix I the forward kiematics model, we saw that it was possible to relate joit agles θ, to the cofiguratio of the robot ed effector T I this sectio, we will see
Math 155 (Lecture 3)
") Math 55 (Lecture 3) September 8, I this lecture, we ll cosider the aswer to oe of the most basic coutig problems i combiatorics Questio How may ways are there to choose a -elemet subset of the set {,,,
Math 55 (Lecture 3) September 8, I this lecture, we ll cosider the aswer to oe of the most basic coutig problems i combiatorics Questio How may ways are there to choose a -elemet subset of the set {,,,
20. CONFIDENCE INTERVALS FOR THE MEAN, UNKNOWN VARIANCE
 20. CONFIDENCE INTERVALS FOR THE MEAN, UNKNOWN VARIANCE If the populatio tadard deviatio σ i ukow, a it uually will be i practice, we will have to etimate it by the ample tadard deviatio. Sice σ i ukow,
20. CONFIDENCE INTERVALS FOR THE MEAN, UNKNOWN VARIANCE If the populatio tadard deviatio σ i ukow, a it uually will be i practice, we will have to etimate it by the ample tadard deviatio. Sice σ i ukow,
EULER-MACLAURIN SUM FORMULA AND ITS GENERALIZATIONS AND APPLICATIONS
 EULER-MACLAURI SUM FORMULA AD ITS GEERALIZATIOS AD APPLICATIOS Joe Javier Garcia Moreta Graduate tudet of Phyic at the UPV/EHU (Uiverity of Baque coutry) I Solid State Phyic Addre: Practicate Ada y Grijalba
EULER-MACLAURI SUM FORMULA AD ITS GEERALIZATIOS AD APPLICATIOS Joe Javier Garcia Moreta Graduate tudet of Phyic at the UPV/EHU (Uiverity of Baque coutry) I Solid State Phyic Addre: Practicate Ada y Grijalba
Automatic Control Systems
 Automatic Cotrol Sytem Lecture-5 Time Domai Aalyi of Orer Sytem Emam Fathy Departmet of Electrical a Cotrol Egieerig email: emfmz@yahoo.com Itrouctio Compare to the implicity of a firt-orer ytem, a eco-orer
Automatic Cotrol Sytem Lecture-5 Time Domai Aalyi of Orer Sytem Emam Fathy Departmet of Electrical a Cotrol Egieerig email: emfmz@yahoo.com Itrouctio Compare to the implicity of a firt-orer ytem, a eco-orer
CALCULATING FIBONACCI VECTORS
 THE GENERALIZED BINET FORMULA FOR CALCULATING FIBONACCI VECTORS Stuart D Aderso Departmet of Physics, Ithaca College 953 Daby Road, Ithaca NY 14850, USA email: saderso@ithacaedu ad Dai Novak Departmet
THE GENERALIZED BINET FORMULA FOR CALCULATING FIBONACCI VECTORS Stuart D Aderso Departmet of Physics, Ithaca College 953 Daby Road, Ithaca NY 14850, USA email: saderso@ithacaedu ad Dai Novak Departmet
Course : Algebraic Combinatorics
 Course 18.312: Algebraic Combiatorics Lecture Notes # 18-19 Addedum by Gregg Musier March 18th - 20th, 2009 The followig material ca be foud i a umber of sources, icludig Sectios 7.3 7.5, 7.7, 7.10 7.11,
Course 18.312: Algebraic Combiatorics Lecture Notes # 18-19 Addedum by Gregg Musier March 18th - 20th, 2009 The followig material ca be foud i a umber of sources, icludig Sectios 7.3 7.5, 7.7, 7.10 7.11,
Math 475, Problem Set #12: Answers
 Math 475, Problem Set #12: Aswers A. Chapter 8, problem 12, parts (b) ad (d). (b) S # (, 2) = 2 2, sice, from amog the 2 ways of puttig elemets ito 2 distiguishable boxes, exactly 2 of them result i oe
Math 475, Problem Set #12: Aswers A. Chapter 8, problem 12, parts (b) ad (d). (b) S # (, 2) = 2 2, sice, from amog the 2 ways of puttig elemets ito 2 distiguishable boxes, exactly 2 of them result i oe
We will look for series solutions to (1) around (at most) regular singular points, which without
 around (at most) regular singular points, which without") ENM 511 J. L. Baai April, 1 Frobeiu Solutio to a d order ODE ear a regular igular poit Coider the ODE y 16 + P16 y 16 + Q1616 y (1) We will look for erie olutio to (1) aroud (at mot) regular igular poit,
ENM 511 J. L. Baai April, 1 Frobeiu Solutio to a d order ODE ear a regular igular poit Coider the ODE y 16 + P16 y 16 + Q1616 y (1) We will look for erie olutio to (1) aroud (at mot) regular igular poit,
Addition: Property Name Property Description Examples. a+b = b+a. a+(b+c) = (a+b)+c
 = (a+b)+c") Notes for March 31 Fields: A field is a set of umbers with two (biary) operatios (usually called additio [+] ad multiplicatio [ ]) such that the followig properties hold: Additio: Name Descriptio Commutativity
Notes for March 31 Fields: A field is a set of umbers with two (biary) operatios (usually called additio [+] ad multiplicatio [ ]) such that the followig properties hold: Additio: Name Descriptio Commutativity
Confidence Intervals. Confidence Intervals
 A overview Mot probability ditributio are idexed by oe me parameter. F example, N(µ,σ 2 ) B(, p). I igificace tet, we have ued poit etimat f parameter. F example, f iid Y 1,Y 2,...,Y N(µ,σ 2 ), Ȳ i a poit
A overview Mot probability ditributio are idexed by oe me parameter. F example, N(µ,σ 2 ) B(, p). I igificace tet, we have ued poit etimat f parameter. F example, f iid Y 1,Y 2,...,Y N(µ,σ 2 ), Ȳ i a poit
A Tail Bound For Sums Of Independent Random Variables And Application To The Pareto Distribution
 Applied Mathematic E-Note, 9009, 300-306 c ISSN 1607-510 Available free at mirror ite of http://wwwmaththuedutw/ ame/ A Tail Boud For Sum Of Idepedet Radom Variable Ad Applicatio To The Pareto Ditributio
Applied Mathematic E-Note, 9009, 300-306 c ISSN 1607-510 Available free at mirror ite of http://wwwmaththuedutw/ ame/ A Tail Boud For Sum Of Idepedet Radom Variable Ad Applicatio To The Pareto Ditributio
Chapter 9. Key Ideas Hypothesis Test (Two Populations)
") Chapter 9 Key Idea Hypothei Tet (Two Populatio) Sectio 9-: Overview I Chapter 8, dicuio cetered aroud hypothei tet for the proportio, mea, ad tadard deviatio/variace of a igle populatio. However, ofte
Chapter 9 Key Idea Hypothei Tet (Two Populatio) Sectio 9-: Overview I Chapter 8, dicuio cetered aroud hypothei tet for the proportio, mea, ad tadard deviatio/variace of a igle populatio. However, ofte
1 Last time: similar and diagonalizable matrices
 Last time: similar ad diagoalizable matrices Let be a positive iteger Suppose A is a matrix, v R, ad λ R Recall that v a eigevector for A with eigevalue λ if v ad Av λv, or equivaletly if v is a ozero
Last time: similar ad diagoalizable matrices Let be a positive iteger Suppose A is a matrix, v R, ad λ R Recall that v a eigevector for A with eigevalue λ if v ad Av λv, or equivaletly if v is a ozero
TESTS OF SIGNIFICANCE
 TESTS OF SIGNIFICANCE Seema Jaggi I.A.S.R.I., Library Aveue, New Delhi eema@iari.re.i I applied ivetigatio, oe i ofte itereted i comparig ome characteritic (uch a the mea, the variace or a meaure of aociatio
TESTS OF SIGNIFICANCE Seema Jaggi I.A.S.R.I., Library Aveue, New Delhi eema@iari.re.i I applied ivetigatio, oe i ofte itereted i comparig ome characteritic (uch a the mea, the variace or a meaure of aociatio
Last time: Ground rules for filtering and control system design
 6.3 Stochatic Etimatio ad Cotrol, Fall 004 Lecture 7 Lat time: Groud rule for filterig ad cotrol ytem deig Gral ytem Sytem parameter are cotaied i w( t ad w ( t. Deired output i grated by takig the igal
6.3 Stochatic Etimatio ad Cotrol, Fall 004 Lecture 7 Lat time: Groud rule for filterig ad cotrol ytem deig Gral ytem Sytem parameter are cotaied i w( t ad w ( t. Deired output i grated by takig the igal
A Note On The Exponential Of A Matrix Whose Elements Are All 1
 Applied Mathematics E-Notes, 8(208), 92-99 c ISSN 607-250 Available free at mirror sites of http://wwwmaththuedutw/ ame/ A Note O The Expoetial Of A Matrix Whose Elemets Are All Reza Farhadia Received
Applied Mathematics E-Notes, 8(208), 92-99 c ISSN 607-250 Available free at mirror sites of http://wwwmaththuedutw/ ame/ A Note O The Expoetial Of A Matrix Whose Elemets Are All Reza Farhadia Received
Performance-Based Plastic Design (PBPD) Procedure
 Procedure") Performace-Baed Platic Deig (PBPD) Procedure 3. Geeral A outlie of the tep-by-tep, Performace-Baed Platic Deig (PBPD) procedure follow, with detail to be dicued i ubequet ectio i thi chapter ad theoretical
Performace-Baed Platic Deig (PBPD) Procedure 3. Geeral A outlie of the tep-by-tep, Performace-Baed Platic Deig (PBPD) procedure follow, with detail to be dicued i ubequet ectio i thi chapter ad theoretical
(3) If you replace row i of A by its sum with a multiple of another row, then the determinant is unchanged! Expand across the i th row:
 If you replace row i of A by its sum with a multiple of another row, then the determinant is unchanged! Expand across the i th row:") Math 50-004 Tue Feb 4 Cotiue with sectio 36 Determiats The effective way to compute determiats for larger-sized matrices without lots of zeroes is to ot use the defiitio, but rather to use the followig
Math 50-004 Tue Feb 4 Cotiue with sectio 36 Determiats The effective way to compute determiats for larger-sized matrices without lots of zeroes is to ot use the defiitio, but rather to use the followig
REVIEW OF SIMPLE LINEAR REGRESSION SIMPLE LINEAR REGRESSION
 REVIEW OF SIMPLE LINEAR REGRESSION SIMPLE LINEAR REGRESSION I liear regreio, we coider the frequecy ditributio of oe variable (Y) at each of everal level of a ecod variable (X). Y i kow a the depedet variable.
REVIEW OF SIMPLE LINEAR REGRESSION SIMPLE LINEAR REGRESSION I liear regreio, we coider the frequecy ditributio of oe variable (Y) at each of everal level of a ecod variable (X). Y i kow a the depedet variable.
On The Computation Of Weighted Shapley Values For Cooperative TU Games
 O he Computatio Of Weighted hapley Value For Cooperative U Game Iriel Draga echical Report 009-0 http://www.uta.edu/math/preprit/ Computatio of Weighted hapley Value O HE COMPUAIO OF WEIGHED HAPLEY VALUE
O he Computatio Of Weighted hapley Value For Cooperative U Game Iriel Draga echical Report 009-0 http://www.uta.edu/math/preprit/ Computatio of Weighted hapley Value O HE COMPUAIO OF WEIGHED HAPLEY VALUE
Review Problems 1. ICME and MS&E Refresher Course September 19, 2011 B = C = AB = A = A 2 = A 3... C 2 = C 3 = =
 Review Problems ICME ad MS&E Refresher Course September 9, 0 Warm-up problems. For the followig matrices A = 0 B = C = AB = 0 fid all powers A,A 3,(which is A times A),... ad B,B 3,... ad C,C 3,... Solutio:
Review Problems ICME ad MS&E Refresher Course September 9, 0 Warm-up problems. For the followig matrices A = 0 B = C = AB = 0 fid all powers A,A 3,(which is A times A),... ad B,B 3,... ad C,C 3,... Solutio:
Generalized Fibonacci Like Sequence Associated with Fibonacci and Lucas Sequences
 Turkih Joural of Aalyi ad Number Theory, 4, Vol., No. 6, 33-38 Available olie at http://pub.ciepub.com/tjat//6/9 Sciece ad Educatio Publihig DOI:.69/tjat--6-9 Geeralized Fiboacci Like Sequece Aociated
Turkih Joural of Aalyi ad Number Theory, 4, Vol., No. 6, 33-38 Available olie at http://pub.ciepub.com/tjat//6/9 Sciece ad Educatio Publihig DOI:.69/tjat--6-9 Geeralized Fiboacci Like Sequece Aociated
Statistics and Chemical Measurements: Quantifying Uncertainty. Normal or Gaussian Distribution The Bell Curve
 Statitic ad Chemical Meauremet: Quatifyig Ucertaity The bottom lie: Do we trut our reult? Should we (or ayoe ele)? Why? What i Quality Aurace? What i Quality Cotrol? Normal or Gauia Ditributio The Bell
Statitic ad Chemical Meauremet: Quatifyig Ucertaity The bottom lie: Do we trut our reult? Should we (or ayoe ele)? Why? What i Quality Aurace? What i Quality Cotrol? Normal or Gauia Ditributio The Bell
18.05 Problem Set 9, Spring 2014 Solutions
 18.05 Problem Set 9, Sprig 2014 Solutio Problem 1. (10 pt.) (a) We have x biomial(, θ), o E(X) =θ ad Var(X) = θ(1 θ). The rule-of-thumb variace i jut 4. So the ditributio beig plotted are biomial(250,
18.05 Problem Set 9, Sprig 2014 Solutio Problem 1. (10 pt.) (a) We have x biomial(, θ), o E(X) =θ ad Var(X) = θ(1 θ). The rule-of-thumb variace i jut 4. So the ditributio beig plotted are biomial(250,
13.4 Scalar Kalman Filter
 13.4 Scalar Kalma Filter Data Model o derive the Kalma filter we eed the data model: a 1 + u < State quatio > + w < Obervatio quatio > Aumptio 1. u i zero mea Gauia, White, u } σ. w i zero mea Gauia, White,
13.4 Scalar Kalma Filter Data Model o derive the Kalma filter we eed the data model: a 1 + u < State quatio > + w < Obervatio quatio > Aumptio 1. u i zero mea Gauia, White, u } σ. w i zero mea Gauia, White,
ME 410 MECHANICAL ENGINEERING SYSTEMS LABORATORY REGRESSION ANALYSIS
 ME 40 MECHANICAL ENGINEERING REGRESSION ANALYSIS Regreio problem deal with the relatiohip betwee the frequec ditributio of oe (depedet) variable ad aother (idepedet) variable() which i (are) held fied
ME 40 MECHANICAL ENGINEERING REGRESSION ANALYSIS Regreio problem deal with the relatiohip betwee the frequec ditributio of oe (depedet) variable ad aother (idepedet) variable() which i (are) held fied
First, note that the LS residuals are orthogonal to the regressors. X Xb X y = 0 ( normal equations ; (k 1) ) So,
 ) So,") 0 2. OLS Part II The OLS residuals are orthogoal to the regressors. If the model icludes a itercept, the orthogoality of the residuals ad regressors gives rise to three results, which have limited practical
0 2. OLS Part II The OLS residuals are orthogoal to the regressors. If the model icludes a itercept, the orthogoality of the residuals ad regressors gives rise to three results, which have limited practical
a for a 1 1 matrix. a b a b 2 2 matrix: We define det ad bc 3 3 matrix: We define a a a a a a a a a a a a a a a a a a
 Math E-2b Lecture #8 Notes This week is all about determiats. We ll discuss how to defie them, how to calculate them, lear the allimportat property kow as multiliearity, ad show that a square matrix A
Math E-2b Lecture #8 Notes This week is all about determiats. We ll discuss how to defie them, how to calculate them, lear the allimportat property kow as multiliearity, ad show that a square matrix A
Eigenvalues and Eigenvectors
 5 Eigevalues ad Eigevectors 5.3 DIAGONALIZATION DIAGONALIZATION Example 1: Let. Fid a formula for A k, give that P 1 1 = 1 2 ad, where Solutio: The stadard formula for the iverse of a 2 2 matrix yields
5 Eigevalues ad Eigevectors 5.3 DIAGONALIZATION DIAGONALIZATION Example 1: Let. Fid a formula for A k, give that P 1 1 = 1 2 ad, where Solutio: The stadard formula for the iverse of a 2 2 matrix yields
ELEC 372 LECTURE NOTES, WEEK 1 Dr. Amir G. Aghdam Concordia University
 EEC 37 ECTURE NOTES, WEEK Dr Amir G Aghdam Cocordia Uiverity Part of thee ote are adapted from the material i the followig referece: Moder Cotrol Sytem by Richard C Dorf ad Robert H Bihop, Pretice Hall
EEC 37 ECTURE NOTES, WEEK Dr Amir G Aghdam Cocordia Uiverity Part of thee ote are adapted from the material i the followig referece: Moder Cotrol Sytem by Richard C Dorf ad Robert H Bihop, Pretice Hall
a for a 1 1 matrix. a b a b 2 2 matrix: We define det ad bc 3 3 matrix: We define a a a a a a a a a a a a a a a a a a
 Math S-b Lecture # Notes This wee is all about determiats We ll discuss how to defie them, how to calculate them, lear the allimportat property ow as multiliearity, ad show that a square matrix A is ivertible
Math S-b Lecture # Notes This wee is all about determiats We ll discuss how to defie them, how to calculate them, lear the allimportat property ow as multiliearity, ad show that a square matrix A is ivertible
Digital Signal Processing, Fall 2010
 Digital Sigal Proeig, Fall 2 Leture 3: Samplig ad reotrutio, traform aalyi of LTI ytem tem Zheg-ua Ta Departmet of Eletroi Sytem Aalborg Uiverity, Demar t@e.aau.d Coure at a glae MM Direte-time igal ad
Digital Sigal Proeig, Fall 2 Leture 3: Samplig ad reotrutio, traform aalyi of LTI ytem tem Zheg-ua Ta Departmet of Eletroi Sytem Aalborg Uiverity, Demar t@e.aau.d Coure at a glae MM Direte-time igal ad
What lies between Δx E, which represents the steam valve, and ΔP M, which is the mechanical power into the synchronous machine?
 A 2.0 Introduction In the lat et of note, we developed a model of the peed governing mechanim, which i given below: xˆ K ( Pˆ ˆ) E () In thee note, we want to extend thi model o that it relate the actual
A 2.0 Introduction In the lat et of note, we developed a model of the peed governing mechanim, which i given below: xˆ K ( Pˆ ˆ) E () In thee note, we want to extend thi model o that it relate the actual
ECM Control Engineering Dr Mustafa M Aziz (2013) SYSTEM RESPONSE
 SYSTEM RESPONSE") ECM5 - Cotrol Egieerig Dr Mutafa M Aziz (3) SYSTEM RESPONSE. Itroductio. Repoe Aalyi of Firt-Order Sytem 3. Secod-Order Sytem 4. Siuoidal Repoe of the Sytem 5. Bode Diagram 6. Baic Fact About Egieerig
ECM5 - Cotrol Egieerig Dr Mutafa M Aziz (3) SYSTEM RESPONSE. Itroductio. Repoe Aalyi of Firt-Order Sytem 3. Secod-Order Sytem 4. Siuoidal Repoe of the Sytem 5. Bode Diagram 6. Baic Fact About Egieerig
COMPARISONS INVOLVING TWO SAMPLE MEANS. Two-tail tests have these types of hypotheses: H A : 1 2
 Tetig Hypothee COMPARISONS INVOLVING TWO SAMPLE MEANS Two type of hypothee:. H o : Null Hypothei - hypothei of o differece. or 0. H A : Alterate Hypothei hypothei of differece. or 0 Two-tail v. Oe-tail
Tetig Hypothee COMPARISONS INVOLVING TWO SAMPLE MEANS Two type of hypothee:. H o : Null Hypothei - hypothei of o differece. or 0. H A : Alterate Hypothei hypothei of differece. or 0 Two-tail v. Oe-tail
Applications in Linear Algebra and Uses of Technology
 1 TI-89: Let A 1 4 5 6 7 8 10 Applicatios i Liear Algebra ad Uses of Techology,adB 4 1 1 4 type i: [1,,;4,5,6;7,8,10] press: STO type i: A type i: [4,-1;-1,4] press: STO (1) Row Echelo Form: MATH/matrix
1 TI-89: Let A 1 4 5 6 7 8 10 Applicatios i Liear Algebra ad Uses of Techology,adB 4 1 1 4 type i: [1,,;4,5,6;7,8,10] press: STO type i: A type i: [4,-1;-1,4] press: STO (1) Row Echelo Form: MATH/matrix
On the 2-Domination Number of Complete Grid Graphs
 Ope Joural of Dicrete Mathematic, 0,, -0 http://wwwcirporg/oural/odm ISSN Olie: - ISSN Prit: - O the -Domiatio Number of Complete Grid Graph Ramy Shahee, Suhail Mahfud, Khame Almaea Departmet of Mathematic,
Ope Joural of Dicrete Mathematic, 0,, -0 http://wwwcirporg/oural/odm ISSN Olie: - ISSN Prit: - O the -Domiatio Number of Complete Grid Graph Ramy Shahee, Suhail Mahfud, Khame Almaea Departmet of Mathematic,
Stochastic Matrices in a Finite Field
 Stochastic Matrices i a Fiite Field Abstract: I this project we will explore the properties of stochastic matrices i both the real ad the fiite fields. We first explore what properties 2 2 stochastic matrices
Stochastic Matrices i a Fiite Field Abstract: I this project we will explore the properties of stochastic matrices i both the real ad the fiite fields. We first explore what properties 2 2 stochastic matrices
Unit 4: Polynomial and Rational Functions
 48 Uit 4: Polyomial ad Ratioal Fuctios Polyomial Fuctios A polyomial fuctio y px ( ) is a fuctio of the form p( x) ax + a x + a x +... + ax + ax+ a 1 1 1 0 where a, a 1,..., a, a1, a0are real costats ad
48 Uit 4: Polyomial ad Ratioal Fuctios Polyomial Fuctios A polyomial fuctio y px ( ) is a fuctio of the form p( x) ax + a x + a x +... + ax + ax+ a 1 1 1 0 where a, a 1,..., a, a1, a0are real costats ad
Infinite Sequences and Series
 Chapter 6 Ifiite Sequeces ad Series 6.1 Ifiite Sequeces 6.1.1 Elemetary Cocepts Simply speakig, a sequece is a ordered list of umbers writte: {a 1, a 2, a 3,...a, a +1,...} where the elemets a i represet
Chapter 6 Ifiite Sequeces ad Series 6.1 Ifiite Sequeces 6.1.1 Elemetary Cocepts Simply speakig, a sequece is a ordered list of umbers writte: {a 1, a 2, a 3,...a, a +1,...} where the elemets a i represet
Mon Feb matrix inverses. Announcements: Warm-up Exercise:
 Math 225-4 Week 6 otes We will ot ecessarily fiish the material from a give day's otes o that day We may also add or subtract some material as the week progresses, but these otes represet a i-depth outlie
Math 225-4 Week 6 otes We will ot ecessarily fiish the material from a give day's otes o that day We may also add or subtract some material as the week progresses, but these otes represet a i-depth outlie
Reliable Decentralized PID Stabilization of MIMO Systems
 Proceedig of the 6 America Cotrol Coferece Mieapoli, Mieota, USA, Jue 4-6, 6 FrB.5 Reliable Decetralized PID Stabilizatio of MIMO Sytem A. N. Mete, A. N. Güdeş, ad A. N. Palazoğlu Abtract Sytematic method
Proceedig of the 6 America Cotrol Coferece Mieapoli, Mieota, USA, Jue 4-6, 6 FrB.5 Reliable Decetralized PID Stabilizatio of MIMO Sytem A. N. Mete, A. N. Güdeş, ad A. N. Palazoğlu Abtract Sytematic method
3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,
![3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,](/thumbs/82/85448051.jpg "3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,") 3. Z Trasform Referece: Etire Chapter 3 of text. Recall that the Fourier trasform (FT) of a DT sigal x [ ] is ω ( ) [ ] X e = j jω k = xe I order for the FT to exist i the fiite magitude sese, S = x [
3. Z Trasform Referece: Etire Chapter 3 of text. Recall that the Fourier trasform (FT) of a DT sigal x [ ] is ω ( ) [ ] X e = j jω k = xe I order for the FT to exist i the fiite magitude sese, S = x [
IntroEcono. Discrete RV. Continuous RV s
 ItroEcoo Aoc. Prof. Poga Porchaiwiekul, Ph.D... ก ก e-mail: Poga.P@chula.ac.th Homepage: http://pioeer.chula.ac.th/~ppoga (c) Poga Porchaiwiekul, Chulalogkor Uiverity Quatitative, e.g., icome, raifall
ItroEcoo Aoc. Prof. Poga Porchaiwiekul, Ph.D... ก ก e-mail: Poga.P@chula.ac.th Homepage: http://pioeer.chula.ac.th/~ppoga (c) Poga Porchaiwiekul, Chulalogkor Uiverity Quatitative, e.g., icome, raifall
Theorem: Let A n n. In this case that A does reduce to I, we search for A 1 as the solution matrix X to the matrix equation A X = I i.e.
 Theorem: Let A be a square matrix The A has a iverse matrix if ad oly if its reduced row echelo form is the idetity I this case the algorithm illustrated o the previous page will always yield the iverse
Theorem: Let A be a square matrix The A has a iverse matrix if ad oly if its reduced row echelo form is the idetity I this case the algorithm illustrated o the previous page will always yield the iverse
Iterative Techniques for Solving Ax b -(3.8). Assume that the system has a unique solution. Let x be the solution. Then x A 1 b.
. Assume that the system has a unique solution. Let x be the solution. Then x A 1 b.") Iterative Techiques for Solvig Ax b -(8) Cosider solvig liear systems of them form: Ax b where A a ij, x x i, b b i Assume that the system has a uique solutio Let x be the solutio The x A b Jacobi ad Gauss-Seidel
Iterative Techiques for Solvig Ax b -(8) Cosider solvig liear systems of them form: Ax b where A a ij, x x i, b b i Assume that the system has a uique solutio Let x be the solutio The x A b Jacobi ad Gauss-Seidel
, then cv V. Differential Equations Elements of Lineaer Algebra Name: Consider the differential equation. and y2 cos( kx)
") Cosider the differetial equatio y '' k y 0 has particular solutios y1 si( kx) ad y cos( kx) I geeral, ay liear combiatio of y1 ad y, cy 1 1 cy where c1, c is also a solutio to the equatio above The reaso
Cosider the differetial equatio y '' k y 0 has particular solutios y1 si( kx) ad y cos( kx) I geeral, ay liear combiatio of y1 ad y, cy 1 1 cy where c1, c is also a solutio to the equatio above The reaso
Chimica Inorganica 3
 himica Iorgaica Irreducible Represetatios ad haracter Tables Rather tha usig geometrical operatios, it is ofte much more coveiet to employ a ew set of group elemets which are matrices ad to make the rule
himica Iorgaica Irreducible Represetatios ad haracter Tables Rather tha usig geometrical operatios, it is ofte much more coveiet to employ a ew set of group elemets which are matrices ad to make the rule
LINEAR REGRESSION ANALYSIS. MODULE IX Lecture Multicollinearity
 LINEAR REGRESSION ANALYSIS MODULE IX Lecture - 9 Multicolliearity Dr Shalabh Departmet of Mathematics ad Statistics Idia Istitute of Techology Kapur Multicolliearity diagostics A importat questio that
LINEAR REGRESSION ANALYSIS MODULE IX Lecture - 9 Multicolliearity Dr Shalabh Departmet of Mathematics ad Statistics Idia Istitute of Techology Kapur Multicolliearity diagostics A importat questio that
A TYPE OF PRIMITIVE ALGEBRA*
 A TYPE OF PRIMITIVE ALGEBRA* BT J. H. M. WEDDERBURN I a recet paper,t L. E. Dickso has discussed the liear associative algebra, A, defied by the relatios xy = yo(x), y = g, where 8 ( x ) is a polyomial
A TYPE OF PRIMITIVE ALGEBRA* BT J. H. M. WEDDERBURN I a recet paper,t L. E. Dickso has discussed the liear associative algebra, A, defied by the relatios xy = yo(x), y = g, where 8 ( x ) is a polyomial
M227 Chapter 9 Section 1 Testing Two Parameters: Means, Variances, Proportions
 M7 Chapter 9 Sectio 1 OBJECTIVES Tet two mea with idepedet ample whe populatio variace are kow. Tet two variace with idepedet ample. Tet two mea with idepedet ample whe populatio variace are equal Tet
M7 Chapter 9 Sectio 1 OBJECTIVES Tet two mea with idepedet ample whe populatio variace are kow. Tet two variace with idepedet ample. Tet two mea with idepedet ample whe populatio variace are equal Tet
Zeros of Polynomials
 Math 160 www.timetodare.com 4.5 4.6 Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered with fidig the solutios of polyomial equatios of ay degree
Math 160 www.timetodare.com 4.5 4.6 Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered with fidig the solutios of polyomial equatios of ay degree
100(1 α)% confidence interval: ( x z ( sample size needed to construct a 100(1 α)% confidence interval with a margin of error of w:
% confidence interval: ( x z ( sample size needed to construct a 100(1 α)% confidence interval with a margin of error of w:") Stat 400, ectio 7. Large Sample Cofidece Iterval ote by Tim Pilachowki a Large-Sample Two-ided Cofidece Iterval for a Populatio Mea ectio 7.1 redux The poit etimate for a populatio mea µ will be a ample
Stat 400, ectio 7. Large Sample Cofidece Iterval ote by Tim Pilachowki a Large-Sample Two-ided Cofidece Iterval for a Populatio Mea ectio 7.1 redux The poit etimate for a populatio mea µ will be a ample