For Peer Review Only. Performance of Real-time Precise Point Positioning (PPP) Marine Geodesy
|
|
|
- Dwayne Day
- 5 years ago
- Views:
Transcription
 Journal: Marine Geodesy Manuscript ID: UMGD-0-00.")

1 Marine Geodesy Performance of Real-time Precise Point Positioning (PPP) Journal: Marine Geodesy Manuscript ID: UMGD-0-00.R Manuscript Type: Research paper Keywords: Absolute position < General Keywords, GPS < General Keywords, Global Ionosphere Map < Geodetic Theory & Applications
2 Page of Marine Geodesy 0 Performance of Real-time Precise Point Positioning (PPP) Junping Chen, Haojun Li, Bin Wu, Yize Zhang,, Jiexian Wang, Congwei Hu Shanghai Astronomical Observatory, Chinese Academy of Sciences, Shanghai 000, P.R. China Department of Surveying and Geo-informatics Engineering, Tongji University, Shanghai, 000, P.R. China) Corresponding author: Prof. Dr. Junping Chen junping.chen@shao.ac.cn Tel: ++(0)- ext. Fax: ++(0)- ext. Address: 0, Nandan Road, 000, Shanghai, P.R. China of other authors: Dr. Haojun Li: yanlhjch@.com Prof. Bin Wu: bwu@shao.ac.cn Mr. Yize Zhang: zhyize@.com Prof. Jiexian Wang: wangjiexian@tongji.edu.cn Prof. Congwei Hu: cwhu@tongji.edu.cn The IGS Real-time Pilot Project (IGS-RTPP) provides real-time precise orbits and clocks, which support real-time positioning for single stations over large areas using the Precise Point Positioning (PPP) technique. This paper investigates the impact of real-time orbits, network configuration and analysis strategies on real-time PPP implementation and demonstrates the real-time PPP performance. One month of data from the IGS network is analyzed in a real-time simulation mode. Results reveal that: ) In clock estimation, differential approaches are much more efficient than the zero-differenced approach; ) The precision of IGS Ultra rapid (IGU) orbits could meet the IGS-RTPP requirement for precise clock estimation and PPP positioning; ) Considering efficiency and precision, a network with stations is recommended for the IGS-RTPP. It is demonstrated that the real-time satellite clock precision is 0. ns supporting hourly static PPP with a mean precision of - centimeters in the North component and - centimeters in the other components. Kinematic PPP assessed with onboard GPS data collected from a buoy provided mean coordinate precision of.,.,. cm in the North, East and Up directions, compared to the RTK solutions. Key words: Wide-Area Positioning, IGU, IGS-RTPP, PPP
3 Marine Geodesy Page of 0. Introduction GPS has been applied in marine applications, e.g., Watson et al. (0) and Crétaux et al. (0) use GPS buoys for the measurement of in-situ sea surface height to calibrate/validate absolute altimeter biases. In most of these applications, the method of real-time kinematic (RTK) positioning (e.g., Bock et al. 000, Rizos 00, Rocken et al. 00) is normally used. The RTK technique requires the installation of reference stations to provide regional correction information. The major limitation of the state-of-art network RTK systems, including latter developments, e.g., VRS (Virtual Reference System), is its rather short reference station separation. Precise Point Positioning (PPP, Zumberge et al. ) has demonstrated to be a valuable technique for single station positioning over continental and even global scale (Kouba 00; Geng et al. 00). The positioning accuracy in static PPP based on the final products from the International GNSS Service (IGS, Dow et al. 00) can reach a few millimeters with daily observations and a few centimeters with hourly observations (Geng et al. 00). Kinematic PPP using IGS final products normally needs a convergence-period of ~0 minutes after which the precision at cm level can be obtained. Following the availability of real-time precise GPS satellite orbit and clock products from the IGS Real-time Pilot Project (IGS-RTPP, Caissy 00), the interest in the PPP technique for real-time kinematic positioning has increased as a potential next generation RTK methodology (Gao and Chen 00). The PPP technique overcomes the station separation limitation of the RTK technique and therefore has valuable applications for user positioning and navigation over remote areas and ocean waters. Applying the PPP technique, the user needs only a single GPS receiver to obtain precise coordinates in real-time at any location of the globe. The accuracy of user positioning based on the PPP technique relies much on the measurements, where positioning with dual frequency observations is superior to single frequency observations, as ionosphere errors can be eliminated. Furthermore, the precision of satellite orbits and clocks are the remaining issues to deliver the required precision of PPP. Ideally, IGS-RTPP will provide precise products supporting users around the globe with real-time PPP positioning capability, in which orbits are either from real-time estimation or IGS predictions and precise satellite clocks are estimated in real-time based on a reference network. This paper investigates key issues of the IGS-RTPP for the support of real-time PPP. In Section, we briefly introduce the current IGS-RTPP status. Section discusses the impacts of real-time orbits, network configuration and analysis strategies on the real-time satellite clocks estimation and user static PPP positioning. In Section we present Kinematic PPP results using onboard GPS data observed from a buoy. Finally, Section summarizes the main findings and presents the conclusions.. Status of the IGS-RTPP Since 00, the IGS operates the IGS-RTPP. IGS-RTPP aims to acquire and distribute
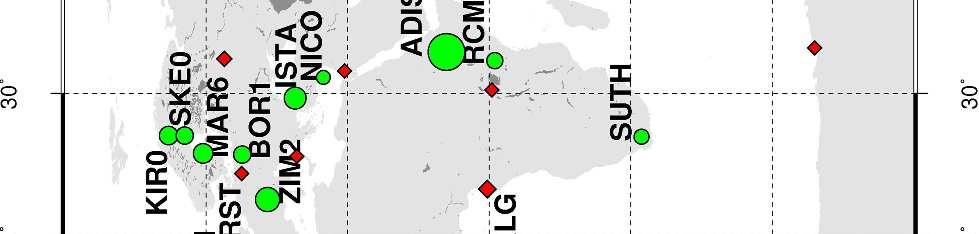
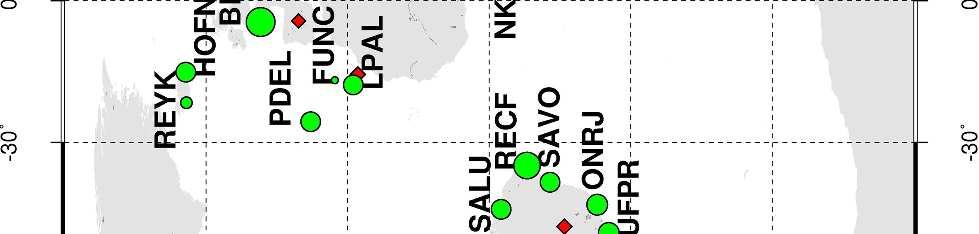
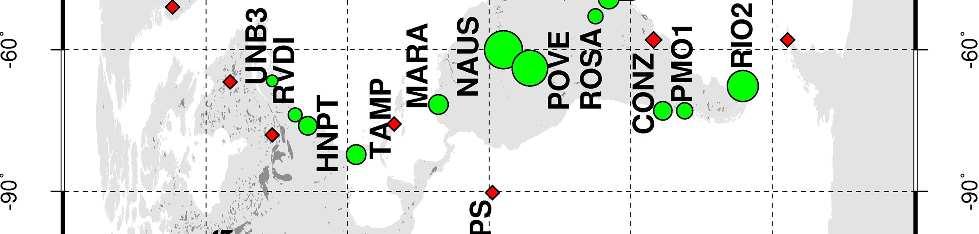
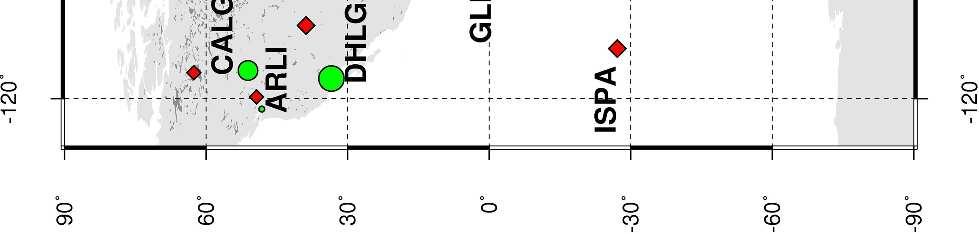
4 Page of Marine Geodesy 0 real-time data and products associated with GNSS satellite constellations. The primary products envisioned for the project are multi-frequency observation data and precise satellite clocks made available in real-time. Under the IGS-RTPP collaboration, there are currently more than 0 stations providing real-time streams. Fig. shows a global network of about 0 stations, of which stations (marked as green circles) provide real-time streams. The data from these stations is used to derive satellite clocks described in the following Sections. Fig. shows also the mean latency of real-time streams recorded using the BNC client (Weber and Mervart 00) in February 0. The overall mean latency is around. seconds. Figure. Station distribution. The green circles denote the real-time network used in this paper for real-time clock determination. The mean observation latency of each station is plotted according to the scale. The red diamonds denote the selected IGS0 reference stations for the hourly PPP tests. Currently, the IGS-RTPP has seven analysis centers (ACs) providing real-time clocks and two centers working on real-time clock combinations. The current precision of real-time satellite clocks is reported to be 0.ns in RMS and 0.ns in standard deviation.. Issues affecting IGS-RTPP products Each IGS-RTPP analysis center differs in their analysis approaches, namely processing strategies, orbits and network configurations. This Section investigates the impacts of these variables on the estimated real-time products using real-time data for the month of February, 0. In the data processing of the following sections, the Hz streams from real-time stations are re-sampled at intervals of seconds and archived in Rinex files (Gurtner, ). Data processing is performed using the LTW_BS software (Wang and Chen, 0) developed at the Shanghai Astronomical Observatory (SHAO) and Tongji University, Shanghai.. Processing strategy The IGS-RTPP intends to support real-time PPP, therefore, efficiency is a main requirement for each analysis center. The IGS-RTPP provides satellite clocks on an epoch-by-epoch basis, thus the processing efficiency depends much on the processing strategy implement in the analysis system. Different strategies are classified as the traditional zero-differenced (ZD), the epoch-differenced (ED, Ge et al. 0; Chen et al. 00, 00) and the satellite- and epoch-differenced (SDED, Li et al. 0) approaches. Based on the real-time network with stations shown in Fig., Table summarizes the mean processing time at each epoch and the clock precision for these three strategies. IGR orbits are used in the processing and real-time clocks are compared to the IGS final clocks; clock precision is represented by standard deviations (STD) with mean offsets removed. For user positioning and navigation, clock STD is more critical as a common offset in the satellite clocks will be absorbed
5 Marine Geodesy Page of 0 by station clocks. Table Average epoch processing time and clock precision using the SDED, ED and ZD approach Strategy SDED ED ZD Time (sec.) STD (ns) From Table we see that the ZD approach takes more than seconds to process one epoch for a network with stations, which means that given the current computing power, users could get the precise products with a minimal delay of seconds. The SDED and ED approaches are tens of times faster than the ZD approach. From the processing efficiency point of view, differential approaches could be more suitable in providing instantaneous precise satellite clocks. We notice that all three strategies achieve comparable precision at 0. ns which is at the same level as current official IGS-RTPP products. PPP positioning results using satellites clocks from the SDED, ED and ZD approaches show also similar positioning accuracy.. Orbits influence Currently, most IGS-RTPP ACs fix the IGU orbits (predicted part) in their real-time analysis instead of estimating orbits. The IGU orbits are updated every hours with a delay of hours, where the predicted IGU orbits have a precision of few cm for the first hours (Dousa, 0). To study the impact of the latency and precision of current IGU orbits on the real-time satellite clock estimation, the same data set as in Section. is used. Data analysis is performed in a simulated epoch-wise real-time mode with real-time data streamed from IGS Rinex files. Satellite clocks are then estimated with the ED strategy by fixing IGU orbits. In the tests, real-time orbits with different latency and update interval are used and the resulting satellite clocks are compared to the IGS final products. Table shows the clock precision using different orbits, where IGU_00_0-0h, for example, is the IGU orbits issued for 00 GPST with a delay of hours and its predictions from 0 hour to 0 hour are used. The mean STDs of the estimated clocks are at 0. ns level when prediction periods are shorter than hours, which is the optimal period over which the official IGU orbits are applicable. With the orbit prediction extents to hour, the precision of real-time clocks degrades to 0. ns. We observe also different biases using different orbits, which is actually the ED clocks offsets at the first epoch (Ge et al. 0) that are be absorbed by user clocks in positioning. From the results of Table, we suggest that the precision of IGU orbits based on current updating strategy is sufficient for the IGS-RTPP. Table Clock precision under different orbits, comparing to the IGS Final clock Orbits IGU_00_00-0hIGU_00_0-0h IGU_00_0-0h IGU_00_00-h IGR Bias(ns)
6 Page of Marine Geodesy 0 STD(ns) Network influence Real-time satellite clocks are the products provided to the users for PPP positioning. Within the IGS-RTPP, the number of IGS stations providing real-time streams is increasing, which could improve the real-time clock estimation. However it increases also the demand for data processing, especially computing time. In the following, we investigated the impact of network size on the precision of estimated satellite clocks and on the resulting PPP positioning. The network described in section and the orbit IGU_00_0-0h are used for each day of the month. Satellite clocks are estimated epoch by epoch using data from selected networks with a different number of globally distributed stations (from to 0 as shown Table, where the network with stations is the same as in Section. and.). Table compares the estimated clocks to the IGS Final clocks. For cases with the number of stations, the mean biases are almost the same as the same orbits are used while the processing the different networks. The mean STDs of the estimated clocks are at the 0. ns level which suggests that using a network with globally distributed stations is sufficient to support current IGS-RTPP requirement. In the case with 0 stations, one satellite could not be tracked for the first few hours, which introduced significant differences as shown in Table. In a real-time environment there are many cases of long delays or stream losses, therefore we recommend that a network with stations is more suitable. Table Clock precision with different network sizes, compared to the IGS Final clock Num. 0 0 Bias(ns) STD(ns) To validate the above recommendation, we performed hourly static PPP for a subset of IGS reference stations as shown in Fig. (red diamond) using the estimated satellite clocks and corresponding IGU orbits. The distance between the PPP station and nearest reference station used in the clock estimation ranged from 00 km to more than 0 km. Data from February, 00 was used to estimate hourly PPP solutions for each station. Two different networks were used in the real-time satellite clocks estimation, namely the NET the network with stations and NET with stations. To assess the hourly PPP precision and remove system biases in the comparison (Geng et al. 00), daily PPP was also performed for these stations using the IGS final orbits and clocks to derive reference coordinates with precision of a few millimeters.
7 Marine Geodesy Page of 0 Figure shows the precision of the hourly PPP results using satellite clocks estimated from a network of stations. We notice that PPP precision is similar for all stations at about cm in the north-south direction and - cm in the other directions. Similar precision is achieved when using the NET. In the data analysis, outliers are identified using a -cm threshold which is the normal D position accuracy. These outlier solutions amount to around % of all hourly solutions. Some stations inside the so-called equatorial scintillation region (covering ± both sides of the earth s magnetic equator, Wanninger ) have more outlier solutions. These stations include REUN (in ocean), GUAM, ISPA, ASPA and THTI, GLPS (in ocean), KUNM, NKLG and KARR. The mean RMS of all PPP solutions is.,.,. cm in the North, East and Up directions and the mean D RMS is. cm. Figure compares the PPP results from the two tests with satellite clocks estimated from different networks NET and NET. We notice similar hourly PPP results with mean differences of 0.,-0.,-0. cm in the North, East and Up directions, which confirms the limited impact of the number of network stations on the satellite clock estimation. Figure. Coordinate precision of static PPP using the satellite clocks estimated using a network with stations and the corresponding IGU orbits. Reference coordinates are from daily static PPP estimations. Figure. Mean coordinates differences of static PPP using different satellite clocks. Satellite clocks are estimated using a network with stations and stations, respectively.. Kinematic PPP using real-time GNSS products PPP positioning has valuable application in precise positioning in remote areas or over the oceans, where ground based RTK cannot reach. To demonstrate the application of real-time products in kinematic PPP positioning, the same data of the IGS stations was analyzed in simulated real-time kinematic PPP mode using the estimated satellite clocks and corresponding orbits IGU_00_0-0h. As the stations are fixed station, we could compare the kinematic PPP results to the daily PPP results to assess the coordinate precision. Figure shows the kinematic coordinate residuals compared to the daily PPP results for station BRAZ (Brasilia). Results show kinematic PPP has a convergence-period of about 0 minutes with the precision after convergence reaching.,.,.0 cm in the North, East and Up directions, respectively. We notice similar results for the other stations in the test. Figure. Kinematic coordinate differences for IGS station BRAZ in the North, East and Up directions, where the reference coordinates are from daily static PPP estimations. Gray bar indicate the first few
8 Page of Marine Geodesy 0 epochs where kinematic PPP achieves convergence. The solution convergence takes 0 minutes, and the precision after convergence is of.,.,.0 cm in each component. To investigate the application in truly kinematic positioning, real kinematic data from a GPS receiver onboard a buoy was analyzed. The experiment was carried out on December, 00 using two dual-frequency Leica GPS receivers. One receiver was mounted on a fixed monument on the ground with known coordinates, the other GPS receiver was installed on a buoy flowing in a lake. The initial baseline length between the reference and buoy station was around meters. In order to reduce the multi-path effects, cut-off elevation was set to degrees during the observation and data sampling was set to minutes. The observation session started around :00 UTC with common observation period of about. hours in duration. Data processing was performed in a simulated real-time mode with data epoch-by-epoch streamed from the Rinex files. In the first step, satellite clocks were estimated using the data from the above mentioned IGS network with stations. Kinematic PPP was then performed at the buoy station applying the estimated satellite clocks and corresponding IGU orbits. For comparison, commercial software was used to derive kinematic coordinates for the buoy using RTK method, where data of the above-mentioned reference station was used and coordinates held fixed to known values. Fig. shows the buoy horizontal displacement and a time series of the height component. We observe that the biggest motion of the buoy is in the north-south direction. Short- and long-term patterns are presented in the buoy s height time-series, reflecting the pattern of the wave in the lake. Figure presents the kinematic PPP coordinates residuals compared to the RTK results. We observe that kinematic PPP requires a convergence-period of around 0 minutes and its precision after convergence reaches.,.,. cm in the North, East and Up directions, respectively. Compared to the RTK method, the precision of the PPP approach is about two times worse but still at cm level. Furthermore, applying the PPP approach, the precision of kinematic PPP coordinates is similar at any point in the globe, thus overcomes the limits of the RTK method. Figure. Horizontal displacement and time series of height component of the buoy flowing on the river. Comparing to the given initial a priori coordinates, we observe the buoy moved at the range of [-.,.] meter in the east-west direction and of [-.,.] meter in the north-south direction and the range of the height changes is of [-.,-.0] meter. Figure. Coordinate differences for the buoy in the North, East and Up directions, where the reference coordinates are from RTK estimations. Gray bar indicate the first few epochs where kinematic PPP achieves convergence. The solution convergence takes 0 minutes, and the precision after convergence is of.,.,. cm in each component.
9 Marine Geodesy Page of 0 Conclusion and discussion Latency, efficiency and precision are the main concerns in real-time PPP applications. We have studied the main factors influencing the real-time products of the IGS-RTPP, including orbits precision, network configuration and analysis strategies. Results show that the precision of real-time satellite clocks is at 0. ns level using the IGU orbits, which in general meet requirements for real-time PPP positioning. Considering the processing efficiency and product precision, we consider a network with ~ stations suitable for the generation of real-time products. Hourly static PPP using real-time products gives coordinates with precision of - centimeters in the North and - centimeters in the East and Up components, for any location around the globe. Kinematic experiment using GPS data from a buoy shows that kinematic PPP convergence can be achieved in 0 minutes. After the solution convergences, the precision of.,.,. cm is obtained in the North, East and Up directions, respectively. With the development of the IGS-RTPP, the availability, reliability and precision of real-time products will be improved and the application of real-time PPP will be increased. As further developments, regional troposphere and ionosphere models (Zhang and Li, 0) could be developed and related corrections can be sent to end-users along with satellite clocks, reducing PPP convergence time while improving position accuracy. Acknowledgments. This research is supported by 0 Talents Programme of The Chinese Academy of Sciences and the National Natural Science Foundation of China (NSFC) (No. ). Acknowledgment goes to BKG for providing the open-source BNC software. Two anonymous reviewers and Associate Editor are thanked for their constructive review of this manuscript. The members of the IGS group at the GFZ are acknowledged as part of this work was carried out when the first author worked there. The figures were produced using the Generic Mapping Tools (Wessel and Smith ). References Bock, Y., R. M. Nikolaidis, P. J. de Jonge, and M. Bevis Instantaneous geodetic positioning at medium distances with the Global Positioning System, J. Geophys. Res., :,-,. Caissy, M. 00. The IGS Real-time Pilot Project Perspective on Data and Product Generation. In: Streaming GNSS Data via Internet Symposium, - Feb., 00 Frankfurt. Chen, J., M. Ge, M. Vennebusch, et al. 00. Progress of the real-time GNSS software development at GFZ, Oral presentation at International GNSS Service Analysis Center Workshop, Miami Beach, Florida, USA. - June, 00. Chen, J., M. Ge, J. Dousa, G. Gendt. 00. Evaluation of EPOS-RT for Real-time Deformation Monitoring. Journal of Global Positioning Systems (): -.
10 Page of Marine Geodesy 0 Crétaux, J.-F., S. Calmant, V. Romanovski, F. Perosanz, S. Tashbaeva, P. Bonnefond, D. Moreira, C. K. Shum, F. Nino, M. Bergé-Nguyen, S. Fleury, P. Gegout, R. Abarca Del Rio, P. Maisongrande. 0. Absolute Calibration of Jason Radar Altimeters from GPS Kinematic Campaigns Over Lake Issykkul, Marine Geodesy, (-): -. Watson, C., N. White, J. Church, R. Burgette, P. Tregoning, R. Coleman. 0. Absolute Calibration in Bass Strait, Australia: TOPEX, Jason- and OSTM/Jason-, Marine Geodesy, (-): -. Dousa, J. 0. The impact of errors in predicted GPS orbits on zenith troposphere delay estimation, GPS Solut., (): -, DOI:.0/s-00-0-z. Dow, J., R. Neilan, G. Gendt. 00. The International GPS Service: celebrating the th anniversary and looking to the next decade. Adv Space Res (): 0. doi:./j.asr Gao, Y. and K. Chen Performance Analysis of Precise Point Positioning Using Rea-Time Orbit and Clock Products, Journal of Global Positioning Systems, (-): -0. Ge, M., J. Chen, J. Dousa, G. Gendt, J. Wickert. 0. A computationally efficient approach for estimating high-rate satellite clock corrections in realtime. GPS Solut. doi:.0/s-0-00-z. Geng, J., F.N. Teferle, C. Shi, X. Meng, A.H. Dodson, J. Li. 00. Ambiguity resolution in precise point positioning with hourly data. GPS Solut (): 0. Gurtner, W.. RINEX: The receiver-independent exchange format. GPS World,. Kouba, J. 00. A possible detection of the December 00 Great Sumatra Andaman Islands earthquake with solution products of the international GNSS service. Studia Geophysica et Geodaetica ():, doi:.0/s Li, H., J. Chen, J. Wang, C. Hu, Z. Liu. 0. Network based Real-time Precise Point Positioning. Adv Space Res (): -.doi:./j.asr Rizos, C. 00. Network RTK Research and Implementation: A Geodetic Perspective, Journal of GPS, ():. Rocken, C., L. Mervart, Z. Lukes, J. Johnson, M. Kanzaki. 00. Testing a New Network RTK Software System, In: Proceedings of GNSS 00. Institute of Navigation, Fairfax, 00, -. Wang, J., J. Chen. 0. Development and Application of GPS Precise Positioning Software, JOURNAL OF TONGJI UNIVERSITY (NATURAL SCIENCE),PP -, (),0. (in Chinese). Wanninger, L.. Ionospheric Monitoring using IGS data, in Proceedings of the IGS Workshop, -Mar., Bern, Switzerland, pp. -0. Weber, G., L. Mervart. 00. The BKG Ntrip Client (BNC). In International GNSS Service, Analysis Center Workshop 00. Miami, Florida, - June. Available at: Wessel, P., W.H.F. Smith.. New, improved version of generic mapping tools released. EOS
11 Marine Geodesy Page of 0 Trans Am Geophys U ():. doi:./eo00. Zhang, X., X. Li. 0. Instantaneous re-initialization in real-time kinematic PPP with cycle slip fixing, GPS Solutions (Online First), doi:.0/s Zumberge, J.F., M.B. Heflin, D.C. Jefferson, M.M. Watkins, F.H. Webb.. Precise point positioning for the efficient and robust analysis of GPS data from large networks, Journal of Geophysical Research, (B): 0-.
12 Page of Marine Geodesy R captions Figure. Station distribution. The green circles denote the real-time network used in this paper for real-time clock determination. The mean observation latency of each station is plotted according to the scale. The red diamonds denote the selected IGS0 reference stations for the hourly PPP tests. Figure. Coordinate precision of static PPP using the satellite clocks estimated using a network with stations and the corresponding IGU orbits. Reference coordinates are from daily static PPP estimations. Figure. Mean coordinates differences of static PPP using different satellite clocks. Satellite clocks are estimated using a network with stations and stations, respectively. Figure. Kinematic coordinate differences for IGS station BRAZ in the North, East and Up directions, where the reference coordinates are from daily static PPP estimations. Gray bar indicate the first few epochs where kinematic PPP achieves convergence. The solution convergence takes 0 minutes, and the precision after convergence is of.,.,.0 cm in each component. Figure. Horizontal displacement and time series of height component of the buoy flowing on the river. Comparing to the given initial a priori coordinates, we observe the buoy moved at the range of [-.,.] meter in the east-west direction and of [-.,.] meter in the north-south direction and the range of the height changes is of [-.,-.0] meter. Figure. Coordinate differences for the buoy in the North, East and Up directions, where the reference coordinates are from RTK estimations. Gray bar indicate the first few epochs where kinematic PPP achieves convergence. The solution convergence takes 0 minutes, and the precision after convergence is of.,.,. cm in each component.


")
13 Marine Geodesy Page of 0 Figure xmm (0 x 0 DPI)
14 Page of Marine Geodesy 0 xmm (0 x 0 DPI)
15 Marine Geodesy Page of 0 xmm (0 x 0 DPI)
16 Page of Marine Geodesy 0 xmm (0 x 0 DPI)
17 Marine Geodesy Page of 0 Figure xmm (0 x 0 DPI)
18 Page of Marine Geodesy 0 xmm (0 x 0 DPI)
EPOS-RT: Software for Real-time GNSS Data Processing
 EGU 2009,Session G4,21 April,2009 1 EPOS-RT: Software for Real-time GNSS Data Processing Maorong Ge, Junping Chen, Gerd Gendt Department of Geodesy and Remote Sensing, Deutsches GeoForschungsZentrum Contact:
EGU 2009,Session G4,21 April,2009 1 EPOS-RT: Software for Real-time GNSS Data Processing Maorong Ge, Junping Chen, Gerd Gendt Department of Geodesy and Remote Sensing, Deutsches GeoForschungsZentrum Contact:
Developments towards GNSS real-time service in GFZ
 1 Developments towards GNSS real-time service in GFZ Dousa, J., Ge, M., Chen J., Gendt, G. Helmholtz-Zentrum Potsdam, Deutsches GeoForschungsZentrum Geng, J. University Institute of Engineering Surveying
1 Developments towards GNSS real-time service in GFZ Dousa, J., Ge, M., Chen J., Gendt, G. Helmholtz-Zentrum Potsdam, Deutsches GeoForschungsZentrum Geng, J. University Institute of Engineering Surveying
Real-Time Estimation of GPS Satellite Clocks Based on Global NTRIP-Streams. André Hauschild
 Real-Time Estimation of GPS Satellite Clocks Based on Global NTRIP-Streams André Hauschild Agenda Motivation Overview of the real-time clock estimation system Assessment of clock product quality a) SISRE
Real-Time Estimation of GPS Satellite Clocks Based on Global NTRIP-Streams André Hauschild Agenda Motivation Overview of the real-time clock estimation system Assessment of clock product quality a) SISRE
The Status of GNSS Data Processing Systems to Estimate Integrated Water Vapour for Use in Numerical Weather Prediction Models
 Manuscript Click here to download Manuscript: IAG_Furqan.tex Click here to view linked References myjournal manuscript No. (will be inserted by the editor) The Status of GNSS Data Processing Systems to
Manuscript Click here to download Manuscript: IAG_Furqan.tex Click here to view linked References myjournal manuscript No. (will be inserted by the editor) The Status of GNSS Data Processing Systems to
2. GNSS Measurements
 Abstract: With the development of the International GNSS Service, whose primary object is to provide highest products for research, education and multidisciplinary application, the concept of Precise Point
Abstract: With the development of the International GNSS Service, whose primary object is to provide highest products for research, education and multidisciplinary application, the concept of Precise Point
IGS-related multi-gnss activities at CODE
 IGS-related multi-gnss activities at CODE Lars Prange (1), Rolf Dach (1) Simon Lutz (1), Stefan Schaer (2), Adrian Jäggi (1) (1) Astronomical Institute, University of Bern, Switzerland source: http://boris.unibe.ch/57698/
IGS-related multi-gnss activities at CODE Lars Prange (1), Rolf Dach (1) Simon Lutz (1), Stefan Schaer (2), Adrian Jäggi (1) (1) Astronomical Institute, University of Bern, Switzerland source: http://boris.unibe.ch/57698/
A. Barbu, J. Laurent-Varin, F. Perosanz, F. Mercier and J. Marty. AVENUE project. June, 20
 Efficient QR Sequential Least Square algorithm for high frequency GNSS Precise Point Positioning A. Barbu, J. Laurent-Varin, F. Perosanz, F. Mercier and J. Marty AVENUE project June, 20 A. Barbu, J. Laurent-Varin,
Efficient QR Sequential Least Square algorithm for high frequency GNSS Precise Point Positioning A. Barbu, J. Laurent-Varin, F. Perosanz, F. Mercier and J. Marty AVENUE project June, 20 A. Barbu, J. Laurent-Varin,
Atmospheric Water Vapor and Geoid Measurements in the Open Ocean with GPS
 Atmospheric Water Vapor and Geoid Measurements in the Open Ocean with GPS Christian Rocken, James Johnson, Teresa Van Hove, Tetsuya Iwabuchi COSMIC Program Office, University Corporation for Atmospheric
Atmospheric Water Vapor and Geoid Measurements in the Open Ocean with GPS Christian Rocken, James Johnson, Teresa Van Hove, Tetsuya Iwabuchi COSMIC Program Office, University Corporation for Atmospheric
PRECISE ORBIT DETERMINATION OF GPS SATELLITES FOR REAL TIME APPLICATIONS
 J. Astron. Space Sci. 18(2), 129 136 (2001) GPS,,,, PRECISE ORBIT DETERMINATION OF GPS SATELLITES FOR REAL TIME APPLICATIONS Hyung-Chul Lim, Pil-Ho Park, Jong-Uk Park, Jung-Ho Cho, Yong-Won Ahn GPS Research
J. Astron. Space Sci. 18(2), 129 136 (2001) GPS,,,, PRECISE ORBIT DETERMINATION OF GPS SATELLITES FOR REAL TIME APPLICATIONS Hyung-Chul Lim, Pil-Ho Park, Jong-Uk Park, Jung-Ho Cho, Yong-Won Ahn GPS Research
National Report of Greece to EUREF 2016
 National Report of Greece to EUREF 2016 M.Gianniou, E. Mitropoulou, D. Mastoris National Cadastre and Mapping Agency S.A. Mesogion Ave. 288, 15562 Athens, Greece 1. Introduction During the last months
National Report of Greece to EUREF 2016 M.Gianniou, E. Mitropoulou, D. Mastoris National Cadastre and Mapping Agency S.A. Mesogion Ave. 288, 15562 Athens, Greece 1. Introduction During the last months
The GOP analysis center: a global near real-time solution
 391 The GOP analysis center: a global near real-time solution J. DOUSA 1 1. Motivation The activities of the Geodetic Observatory Pecny (GOP) analysis center in the field of the NRT processing has started
391 The GOP analysis center: a global near real-time solution J. DOUSA 1 1. Motivation The activities of the Geodetic Observatory Pecny (GOP) analysis center in the field of the NRT processing has started
Operational Support by ESOC s GRAS Ground Support Network - Status and Outlook
 ESA UNCLASSIFIED Releasable to the public Operational Support by ESOC s GRAS Ground Support Network - Status and Outlook R. Zandbergen, F.Wollenweber, C.Marquardt, W. Enderle and the ESOC and EUMETSAT
ESA UNCLASSIFIED Releasable to the public Operational Support by ESOC s GRAS Ground Support Network - Status and Outlook R. Zandbergen, F.Wollenweber, C.Marquardt, W. Enderle and the ESOC and EUMETSAT
GPS 10, GPS , GPS. (J PL ) Zumbeger. mm, cm ; ( Global RT K) [3 ]
![GPS 10, GPS , GPS. (J PL ) Zumbeger. mm, cm ; ( Global RT K) [3 ]](/thumbs/92/110253734.jpg "GPS 10, GPS , GPS. (J PL ) Zumbeger. mm, cm ; ( Global RT K) [3 ]") 27 3 Vol. 27 No. 3 2002 6 Geomatics and Information Science of Wuhan University J une 2002 :1000-050X(2002) 03-0234-07 :A GPS 1 2 (1,,430072) (2 GPS,129,430079) : ; IGS IGS,,, 15min, X Y Z 20cm : GPS ;;
27 3 Vol. 27 No. 3 2002 6 Geomatics and Information Science of Wuhan University J une 2002 :1000-050X(2002) 03-0234-07 :A GPS 1 2 (1,,430072) (2 GPS,129,430079) : ; IGS IGS,,, 15min, X Y Z 20cm : GPS ;;
LONG-TERM TRENDS IN THE AMOUNT OF ATMOSPHERIC WATER VAPOUR DERIVED FROM SPACE GEODETIC AND REMOTE SENSING TECHNIQUES
 LONG-TERM TRENDS IN THE AMOUNT OF ATMOSPHERIC WATER VAPOUR DERIVED FROM SPACE GEODETIC AND REMOTE SENSING TECHNIQUES Rüdiger Haas, Tong Ning, and Gunnar Elgered Chalmers University of Technology, Onsala
LONG-TERM TRENDS IN THE AMOUNT OF ATMOSPHERIC WATER VAPOUR DERIVED FROM SPACE GEODETIC AND REMOTE SENSING TECHNIQUES Rüdiger Haas, Tong Ning, and Gunnar Elgered Chalmers University of Technology, Onsala
Gözde AKAY and Haluk OZENER, Turkey
 Investigation of the Displacements from 1941 to 2007 using Terrestrial and Gps Measurements along the Western Part of North Anatolian Fault in Marmara Region Gözde AKAY and Haluk OZENER, Turkey Key words:
Investigation of the Displacements from 1941 to 2007 using Terrestrial and Gps Measurements along the Western Part of North Anatolian Fault in Marmara Region Gözde AKAY and Haluk OZENER, Turkey Key words:
2 Sofia University, Sofia, Bulgaria. C Hackman 1, Guergana Guerova 2, S Byram 1, J Dousa 3 and U Hugentobler 4
 International GNSS Service (IGS) Troposphere Products and Working Group Activities C Hackman 1, Guergana Guerova 2, S Byram 1, J Dousa 3 and U Hugentobler 4 1 United States Naval Observatory, Washington,
International GNSS Service (IGS) Troposphere Products and Working Group Activities C Hackman 1, Guergana Guerova 2, S Byram 1, J Dousa 3 and U Hugentobler 4 1 United States Naval Observatory, Washington,
Satellite baseline determination with phase cycle slip fixing over long data gaps
 Satellite baseline determination with phase cycle slip fixing over long data gaps Grzegorz Michalak and Rolf König Overview The cycle slip fixing methode 3 solutions Float ambiguities Ambiguities fixed
Satellite baseline determination with phase cycle slip fixing over long data gaps Grzegorz Michalak and Rolf König Overview The cycle slip fixing methode 3 solutions Float ambiguities Ambiguities fixed
INTERNATIONAL SLR SERVICE
 ARTIFICIAL SATELLITES, Vol. 46, No. 4 2011 DOI: 10.2478/v10018-012-0004-z INTERNATIONAL SLR SERVICE Stanisław Schillak Space Research Centre, Polish Academy of Sciences Astrogeodynamic Observatory, Borowiec
ARTIFICIAL SATELLITES, Vol. 46, No. 4 2011 DOI: 10.2478/v10018-012-0004-z INTERNATIONAL SLR SERVICE Stanisław Schillak Space Research Centre, Polish Academy of Sciences Astrogeodynamic Observatory, Borowiec
Accuracy of GPS Positioning in the Presence of Large Height Differences
 Accuracy of GPS Positioning in the Presence of Large Height Differences by D. Ugur Sanli & F. Kurumahmut Background Large height difference between baseline points First mentioned by Gurtner et al. 1989
Accuracy of GPS Positioning in the Presence of Large Height Differences by D. Ugur Sanli & F. Kurumahmut Background Large height difference between baseline points First mentioned by Gurtner et al. 1989
An Assessment of the Accuracy of PPP in Remote Areas in Oman
 An Assessment of the Accuracy of PPP in Remote Areas in Oman Rashid AL ALAWI, Sultanate of Oman and Audrey MARTIN, Ireland Keywords: GNSS, PPP, Oman Survey Infrastructure SUMMARY Traditionally, high accuracy
An Assessment of the Accuracy of PPP in Remote Areas in Oman Rashid AL ALAWI, Sultanate of Oman and Audrey MARTIN, Ireland Keywords: GNSS, PPP, Oman Survey Infrastructure SUMMARY Traditionally, high accuracy
Hourly Updated Precise Orbit Products of Quad-constellation
 Hourly Updated Precise Orbit Products of Quad-constellation Satellites in IGS Analysis Center at Wuhan University Qile Zhao; Hongyang Ma; Xiaolong Xu; Jing Guo; Min Li Wuhan University Jul.05 2017 Paris
Hourly Updated Precise Orbit Products of Quad-constellation Satellites in IGS Analysis Center at Wuhan University Qile Zhao; Hongyang Ma; Xiaolong Xu; Jing Guo; Min Li Wuhan University Jul.05 2017 Paris
Christina Selle, Shailen Desai IGS Workshop 2016, Sydney
 Optimization of tropospheric delay estimation parameters by comparison of GPS-based precipitable water vapor estimates with microwave radiometer measurements Christina Selle, Shailen Desai IGS Workshop
Optimization of tropospheric delay estimation parameters by comparison of GPS-based precipitable water vapor estimates with microwave radiometer measurements Christina Selle, Shailen Desai IGS Workshop
The Victorian Seismic Zone 2011 GNSS Campaign Data Analysis
 G E O S C I E N C E A U S T R A L I A The Victorian Seismic Zone 2011 GNSS Campaign Data Analysis G. Hu Record 2012/38 GeoCat # 74005 APPLYING GEOSCIENCE TO AUSTRALIA S MOST IMPORTANT CHALLENGES The Victorian
G E O S C I E N C E A U S T R A L I A The Victorian Seismic Zone 2011 GNSS Campaign Data Analysis G. Hu Record 2012/38 GeoCat # 74005 APPLYING GEOSCIENCE TO AUSTRALIA S MOST IMPORTANT CHALLENGES The Victorian
Analysis of the Accuracy of GMF, NMF, and VMF1 Mapping Functions with GPT 50 a Priori Zenith Constraint in Tropospheric Delay Modelling
 Analysis of the Accuracy of GMF, NMF, and VMF1 Mapping Functions with GPT 50 a Priori Zenith Constraint in Tropospheric Delay Modelling Brian Makabayi 1 Addisu Hunegnaw 2 1 Assistant Lecturer, Department
Analysis of the Accuracy of GMF, NMF, and VMF1 Mapping Functions with GPT 50 a Priori Zenith Constraint in Tropospheric Delay Modelling Brian Makabayi 1 Addisu Hunegnaw 2 1 Assistant Lecturer, Department
ESTIMATES OF HORIZONTAL DISPLACEMENTS ASSOCIATED WITH THE 1999 TAIWAN EARTHQUAKE
 ESTIMATES OF HORIZONTAL DISPLACEMENTS ASSOCIATED WITH THE 1999 TAIWAN EARTHQUAKE C. C. Chang Department of Surveying and Mapping Engineering Chung Cheng Institute of Technology, Taiwan, ROC ABSTRACT A
ESTIMATES OF HORIZONTAL DISPLACEMENTS ASSOCIATED WITH THE 1999 TAIWAN EARTHQUAKE C. C. Chang Department of Surveying and Mapping Engineering Chung Cheng Institute of Technology, Taiwan, ROC ABSTRACT A
Evaluation on the Multi-GNSS Precise Orbit and Clock Products
 Evaluation on the Multi-GNSS Precise Orbit and Clock Products Fei Guo 1, 2, Xingxing Li 3, Xiaohong Zhang 1, Jinling Wang 2 1 School of Geodesy and Geomatics, Wuhan University, China 2 School of Civil
Evaluation on the Multi-GNSS Precise Orbit and Clock Products Fei Guo 1, 2, Xingxing Li 3, Xiaohong Zhang 1, Jinling Wang 2 1 School of Geodesy and Geomatics, Wuhan University, China 2 School of Civil
We have processed RO data for climate research and for validation of weather data since 1995 as illustrated in Figure 1.
 Real-time Analysis of COSMIC Data Christian Rocken, Doug Hunt, Bill Schreiner University Corporation for Atmospheric Research (UCAR) COSMIC Project Office Boulder, CO Abstract UCAR has analyzed GPS radio
Real-time Analysis of COSMIC Data Christian Rocken, Doug Hunt, Bill Schreiner University Corporation for Atmospheric Research (UCAR) COSMIC Project Office Boulder, CO Abstract UCAR has analyzed GPS radio
GPS cycle slips detection and repair through various signal combinations
 International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) GPS cycle slips detection and repair through various signal combinations M. E. El-Tokhey 1, T. F. Sorour 2, A. E. Ragheb 3, M. O.
International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) GPS cycle slips detection and repair through various signal combinations M. E. El-Tokhey 1, T. F. Sorour 2, A. E. Ragheb 3, M. O.
Post-Processed Precise Point Positioning: A Viable Alternative?
 Post-Processed Precise Point Positioning: A Viable Alternative? Thomas Grinter Survey Infrastructure and Geodesy, Land and Property Information NSW Department of Finance & Services Thomas.Grinter@lpi.nsw.gov.au
Post-Processed Precise Point Positioning: A Viable Alternative? Thomas Grinter Survey Infrastructure and Geodesy, Land and Property Information NSW Department of Finance & Services Thomas.Grinter@lpi.nsw.gov.au
ESTIMATING THE RESIDUAL TROPOSPHERIC DELAY FOR AIRBORNE DIFFERENTIAL GPS POSITIONING (A SUMMARY)
") ESTIMATING THE RESIDUAL TROPOSPHERIC DELAY FOR AIRBORNE DIFFERENTIAL GPS POSITIONING (A SUMMARY) J. Paul Collins and Richard B. Langley Geodetic Research Laboratory Department of Geodesy and Geomatics
ESTIMATING THE RESIDUAL TROPOSPHERIC DELAY FOR AIRBORNE DIFFERENTIAL GPS POSITIONING (A SUMMARY) J. Paul Collins and Richard B. Langley Geodetic Research Laboratory Department of Geodesy and Geomatics
CONTENTS 1. INTRODUCTION (STUDY AREA) 3. PROCESSING (CONVENTIAL& GPS) 4. ANALYSIS OF OUTCOMES 5. CONCLUSIONS 2. THE GCM-ITU NETWORK SURVEYING
 3. PROCESSING (CONVENTIAL& GPS) 4. ANALYSIS OF OUTCOMES 5. CONCLUSIONS 2. THE GCM-ITU NETWORK SURVEYING") INVESTIGATION OF THE DISPLACEMENTS FROM 1941 TO 2007 USING TERRESTRIAL AND GPS MEASUREMENTS ALONG THE WESTERN PART OF NORTH ANATOLIAN FAULT IN MARMARA REGION G. Akay 1 and H. Ozener 2,1 [1]{Bogazici University,
INVESTIGATION OF THE DISPLACEMENTS FROM 1941 TO 2007 USING TERRESTRIAL AND GPS MEASUREMENTS ALONG THE WESTERN PART OF NORTH ANATOLIAN FAULT IN MARMARA REGION G. Akay 1 and H. Ozener 2,1 [1]{Bogazici University,
IGS POLAR MOTION MEASUREMENTS
 STATUS & PROSPECTS FOR IGS POLAR MOTION MEASUREMENTS Why does the IGS care about EOPs? observations, predictions, & IGS product table Recent pole & pole rate accuracies & error sources Rapid & Final products
STATUS & PROSPECTS FOR IGS POLAR MOTION MEASUREMENTS Why does the IGS care about EOPs? observations, predictions, & IGS product table Recent pole & pole rate accuracies & error sources Rapid & Final products
Relationships between mass redistribution, station position, geocenter, and Earth rotation: Results from IGS GNAAC analysis
 Relationships between mass redistribution, station position, geocenter, and Earth rotation: Results from IGS GNAAC analysis Geoff Blewitt Mackay School of Earth Sciences and Engineering University of Nevada,
Relationships between mass redistribution, station position, geocenter, and Earth rotation: Results from IGS GNAAC analysis Geoff Blewitt Mackay School of Earth Sciences and Engineering University of Nevada,
Impact of the SRP model on CODE's 5- system orbit and clock solution for the MGEX
 Impact of the SRP model on CODE's 5- system orbit and clock solution for the MGEX L. Prange, E. Orliac, R. Dach, D. Arnold, G. Beutler, S. Schaer, A. Jäggi Astronomical Institute, University of Bern, Switzerland
Impact of the SRP model on CODE's 5- system orbit and clock solution for the MGEX L. Prange, E. Orliac, R. Dach, D. Arnold, G. Beutler, S. Schaer, A. Jäggi Astronomical Institute, University of Bern, Switzerland
GNSS-specific local effects at the Geodetic Observatory Wettzell
 GNSS-specific local effects at the Geodetic Observatory Wettzell Peter Steigenberger, Urs Hugentobler, Ralf Schmid Technische Universität München (TUM) Uwe Hessels, Thomas Klügel Bundesamt für Kartographie
GNSS-specific local effects at the Geodetic Observatory Wettzell Peter Steigenberger, Urs Hugentobler, Ralf Schmid Technische Universität München (TUM) Uwe Hessels, Thomas Klügel Bundesamt für Kartographie
IMPACT OF GROUND-BASED GPS PRECIPITABLE WATER VAPOR AND COSMIC GPS REFRACTIVITY PROFILE ON HURRICANE DEAN FORECAST. (a) (b) (c)
 (b) (c)") 9B.3 IMPACT OF GROUND-BASED GPS PRECIPITABLE WATER VAPOR AND COSMIC GPS REFRACTIVITY PROFILE ON HURRICANE DEAN FORECAST Tetsuya Iwabuchi *, J. J. Braun, and T. Van Hove UCAR, Boulder, Colorado 1. INTRODUCTION
9B.3 IMPACT OF GROUND-BASED GPS PRECIPITABLE WATER VAPOR AND COSMIC GPS REFRACTIVITY PROFILE ON HURRICANE DEAN FORECAST Tetsuya Iwabuchi *, J. J. Braun, and T. Van Hove UCAR, Boulder, Colorado 1. INTRODUCTION
Updated Results from the In Situ Calibration Site in Bass Strait, Australia
 Updated Results from the In Situ Calibration Site in Bass Strait, Australia Christopher Watson 1, Neil White 2,, John Church 2 Reed Burgette 1, Paul Tregoning 3, Richard Coleman 4 1 University of Tasmania
Updated Results from the In Situ Calibration Site in Bass Strait, Australia Christopher Watson 1, Neil White 2,, John Church 2 Reed Burgette 1, Paul Tregoning 3, Richard Coleman 4 1 University of Tasmania
Using UNAVCO Real-Time CORS Data, a No-Cost Positioning Resource
 Using UNAVCO Real-Time CORS Data, a No-Cost Positioning Resource By: Mark Silver, ms@igage.com, +1-801-412-0011 Date: 19 August 2014 UNAVCO is a non-profit consortium of Universities that coordinates the
Using UNAVCO Real-Time CORS Data, a No-Cost Positioning Resource By: Mark Silver, ms@igage.com, +1-801-412-0011 Date: 19 August 2014 UNAVCO is a non-profit consortium of Universities that coordinates the
Treatment of horizontal and vertical tidal signals in GPS data: A case study on a floating ice shelf
 LETTER Earth Planets Space, 52, 1043 1047, 2000 Treatment of horizontal and vertical tidal signals in GPS data: A case study on a floating ice shelf Matt King 1, Richard Coleman 1,2, and Peter Morgan 3
LETTER Earth Planets Space, 52, 1043 1047, 2000 Treatment of horizontal and vertical tidal signals in GPS data: A case study on a floating ice shelf Matt King 1, Richard Coleman 1,2, and Peter Morgan 3
IGS Reprocessing. and First Quality Assessment
 IGS Reprocessing Summary of Orbit/Clock Combination and First Quality Assessment Gerd Gendt, GeoForschungsZentrum Potsdam Jake Griffiths, NOAA/National Geodetic Survey Thomas Nischan, GeoForschungsZentrum
IGS Reprocessing Summary of Orbit/Clock Combination and First Quality Assessment Gerd Gendt, GeoForschungsZentrum Potsdam Jake Griffiths, NOAA/National Geodetic Survey Thomas Nischan, GeoForschungsZentrum
MATRAG Measurement of Alpine Tropospheric Delay by Radiometer and GPS
 MATRAG Measurement of Alpine Tropospheric Delay by Radiometer and GPS Petra Häfele 1, Matthias Becker, Elmar Brockmann, Lorenz Martin, Michael Kirchner 1 University of the Bundeswehr Munich, 85577 Neubiberg,
MATRAG Measurement of Alpine Tropospheric Delay by Radiometer and GPS Petra Häfele 1, Matthias Becker, Elmar Brockmann, Lorenz Martin, Michael Kirchner 1 University of the Bundeswehr Munich, 85577 Neubiberg,
Development of Laser Measurement to Space Debris at Shanghai SLR Station
 Abstract Development of Laser Measurement to Space Debris at Shanghai SLR Station Zhang Zhongping, Deng Huarong, Tang Kai, Wu Zhibo, Zhang Haifeng (Shanghai Astronomical Observatory of Chinese Academy
Abstract Development of Laser Measurement to Space Debris at Shanghai SLR Station Zhang Zhongping, Deng Huarong, Tang Kai, Wu Zhibo, Zhang Haifeng (Shanghai Astronomical Observatory of Chinese Academy
Prepared by Dongchen E Chinese Antarctic Center of Surveying and Mapping Chinese representative to SCAR WG-GGI
 SCAR XXVI Tokyo,Japan July, 2000 Report of Current Activities of China for 1998-2000 Prepared by Dongchen E Chinese Antarctic Center of Surveying and Mapping Chinese representative to SCAR WG-GGI Chinese
SCAR XXVI Tokyo,Japan July, 2000 Report of Current Activities of China for 1998-2000 Prepared by Dongchen E Chinese Antarctic Center of Surveying and Mapping Chinese representative to SCAR WG-GGI Chinese
Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data
: A new empirical mapping function based on numerical weather model data") Johannes Böhm, Arthur Niell, Paul Tregoning, and Harald Schuh Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data Geophysical Research Letters Vol. 33,
Johannes Böhm, Arthur Niell, Paul Tregoning, and Harald Schuh Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data Geophysical Research Letters Vol. 33,
Augment BeiDou real time precise point positioning using ECMWF data
 https://doi.org/0.86/s40623-08-0870-0 FULL PAPER Augment BeiDou real time precise point positioning using ECMWF data Kemin Zhu, Lei Zhao, Wei Wang, Shoujian Zhang *, Renli Liu 2* and Jinling Wang 3 Open
https://doi.org/0.86/s40623-08-0870-0 FULL PAPER Augment BeiDou real time precise point positioning using ECMWF data Kemin Zhu, Lei Zhao, Wei Wang, Shoujian Zhang *, Renli Liu 2* and Jinling Wang 3 Open
Multi-GNSS Opportunities and Challenges
 Multi-GNSS Opportunities and Challenges School of Surveying & Spatial Information Systems Ali Al-Shaery 1,2 Shaocheng Zhang 3 Samsung Lim 1 Chris Rizos 1 1 School of Surveying and Spatial Information System,
Multi-GNSS Opportunities and Challenges School of Surveying & Spatial Information Systems Ali Al-Shaery 1,2 Shaocheng Zhang 3 Samsung Lim 1 Chris Rizos 1 1 School of Surveying and Spatial Information System,
The Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data
: A new empirical mapping function based on numerical weather model data") The Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data J. Boehm, A. Niell, P. Tregoning, H. Schuh Troposphere mapping functions are used in the analyses
The Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data J. Boehm, A. Niell, P. Tregoning, H. Schuh Troposphere mapping functions are used in the analyses
Large surface wave of the 2004 Sumatra-Andaman earthquake captured by the very long baseline kinematic analysis of 1-Hz GPS data
 Earth Planets Space, 58, 153 157, 2006 Large surface wave of the 2004 Sumatra-Andaman earthquake captured by the very long baseline kinematic analysis of 1-Hz GPS data Yusaku Ohta, Irwan Meilano, Takeshi
Earth Planets Space, 58, 153 157, 2006 Large surface wave of the 2004 Sumatra-Andaman earthquake captured by the very long baseline kinematic analysis of 1-Hz GPS data Yusaku Ohta, Irwan Meilano, Takeshi
GNSS space clocks assessment based on different IGS and MGEX data. Tung Thanh Thai, Giovanna Signorile, Ilaria Sesia
 GNSS space clocks assessment based on different IGS and MGEX data Tung Thanh Thai, Giovanna Signorile, Ilaria Sesia 1 INRIM and GNSS Time Metrology INRIM is involved in characterization of atomic clocks
GNSS space clocks assessment based on different IGS and MGEX data Tung Thanh Thai, Giovanna Signorile, Ilaria Sesia 1 INRIM and GNSS Time Metrology INRIM is involved in characterization of atomic clocks
INSAR ATMOSPHERIC DELAY MIGITIGATION BY GPS; CASE STUDY IZMIT EARTQUAKE INTERFEROGRAMS
 INSAR ATMOSPHERIC DELAY MIGITIGATION BY GPS; CASE STUDY IZMIT EARTQUAKE INTERFEROGRAMS M.U. Altın a, *, E. Tari a, L. Ge b a ITU, Civil Engineering Faculty, 80626 Maslak Istanbul, Turkey (altinm, tari)@itu.edu.tr
INSAR ATMOSPHERIC DELAY MIGITIGATION BY GPS; CASE STUDY IZMIT EARTQUAKE INTERFEROGRAMS M.U. Altın a, *, E. Tari a, L. Ge b a ITU, Civil Engineering Faculty, 80626 Maslak Istanbul, Turkey (altinm, tari)@itu.edu.tr
Solid Earth Deformations Induced by the Sumatra Earthquakes of : GPS Detection of Co-Seismic Displacements
 Solid Earth Deformations Induced by the Sumatra Earthquakes of 2-25: GPS Detection of Co-Seismic Displacements and Tsunami-Induced Loading H.-P. Plag, G. Blewitt, C. Kreemer, W.C. Haond Nevada Bureau of
Solid Earth Deformations Induced by the Sumatra Earthquakes of 2-25: GPS Detection of Co-Seismic Displacements and Tsunami-Induced Loading H.-P. Plag, G. Blewitt, C. Kreemer, W.C. Haond Nevada Bureau of
How GNSS CORS in Japan works for geodetic control and disaster mitigations
 ICG Working Group D Reference Frames, Timing and Applications How GNSS CORS in Japan works for geodetic control and disaster mitigations ICG11, Nov. 7-11, 2016, Sochi, Russia Hiromichi TSUJI Geodetic Observation
ICG Working Group D Reference Frames, Timing and Applications How GNSS CORS in Japan works for geodetic control and disaster mitigations ICG11, Nov. 7-11, 2016, Sochi, Russia Hiromichi TSUJI Geodetic Observation
Rapid Determination of Earthquake Magnitude using GPS for Tsunami Warning Systems: An Opportunity for IGS to Make a Difference
 Rapid Determination of Earthquake Magnitude using GPS for Tsunami Warning Systems: An Opportunity for IGS to Make a Difference Geoffrey Blewitt, 1 Corné Kreemer, 1 William C. Hammond, 1 Hans-Peter Plag,
Rapid Determination of Earthquake Magnitude using GPS for Tsunami Warning Systems: An Opportunity for IGS to Make a Difference Geoffrey Blewitt, 1 Corné Kreemer, 1 William C. Hammond, 1 Hans-Peter Plag,
Application of Accelerometer Data in Precise Orbit Determination of GRACE -A and -B
 Chin. J. Astron. Astrophys. Vol. 8 (28), No., 63 61 (http://www.chjaa.org) Chinese Journal of Astronomy and Astrophysics Application of Accelerometer Data in Precise Orbit Determination of GRACE -A and
Chin. J. Astron. Astrophys. Vol. 8 (28), No., 63 61 (http://www.chjaa.org) Chinese Journal of Astronomy and Astrophysics Application of Accelerometer Data in Precise Orbit Determination of GRACE -A and
GG S. Internal Vision of GGOS. Markus Rothacher. GFZ Potsdam
 Internal Vision of GGOS Markus Rothacher GFZ Potsdam GGOS Retreat DGFI in Munich February 15-16, 2006 Contents Motivation Four Levels of Products of the IAG Services: First Level: Raw Data Collection Second
Internal Vision of GGOS Markus Rothacher GFZ Potsdam GGOS Retreat DGFI in Munich February 15-16, 2006 Contents Motivation Four Levels of Products of the IAG Services: First Level: Raw Data Collection Second
Impact of Tropospheric Delay Gradients on Total Tropospheric Delay and Precise Point Positioning
 International Journal of Geosciences, 016, 7, 645-654 Published Online May 016 in SciRes. http://www.scirp.org/journal/ijg http://dx.doi.org/10.436/ijg.016.75050 Impact of Tropospheric Delay Gradients
International Journal of Geosciences, 016, 7, 645-654 Published Online May 016 in SciRes. http://www.scirp.org/journal/ijg http://dx.doi.org/10.436/ijg.016.75050 Impact of Tropospheric Delay Gradients
Impact of GPS and TMI Precipitable Water Data on Mesoscale Numerical Weather Prediction Model Forecasts
 Journal of the Meteorological Society of Japan, Vol. 82, No. 1B, pp. 453--457, 2004 453 Impact of GPS and TMI Precipitable Water Data on Mesoscale Numerical Weather Prediction Model Forecasts Ko KOIZUMI
Journal of the Meteorological Society of Japan, Vol. 82, No. 1B, pp. 453--457, 2004 453 Impact of GPS and TMI Precipitable Water Data on Mesoscale Numerical Weather Prediction Model Forecasts Ko KOIZUMI
FEASIBILITY OF DIRECTLY MEASURING SINGLE LINE-OF-SIGHT GPS SIGNAL DELAYS
 FEASIBILITY OF DIRECTLY MEASURING SINGLE LINE-OF-SIGHT GPS SIGNAL DELAYS Pedro Elosegui and James L. Davis Smithsonian Astrophysical Observatory Cambridge, MA 13, USA January, 3 1 1. Executive Summary
FEASIBILITY OF DIRECTLY MEASURING SINGLE LINE-OF-SIGHT GPS SIGNAL DELAYS Pedro Elosegui and James L. Davis Smithsonian Astrophysical Observatory Cambridge, MA 13, USA January, 3 1 1. Executive Summary
GGSP: Realisation of the Galileo Terrestrial Reference Frame
 Galileo Geodetic Service Provider Prototype GGSP: Realisation of the Galileo Terrestrial Reference Frame Wolfgang Söhne, Johannes Ihde Federal Agency for Cartography and Geodesy Gerd Gendt, Markus Rothacher
Galileo Geodetic Service Provider Prototype GGSP: Realisation of the Galileo Terrestrial Reference Frame Wolfgang Söhne, Johannes Ihde Federal Agency for Cartography and Geodesy Gerd Gendt, Markus Rothacher
Towards an improved ILRS TRF contribution
 Towards an improved ILRS TRF contribution Erricos C. Pavlis ILRS Analysis Coordinator JCET/ & NASA Goddard IERS Workshop on Conventions 2007 20-21 Sept. 2007, Sèvres, France Overview The ILRS Network Geometry
Towards an improved ILRS TRF contribution Erricos C. Pavlis ILRS Analysis Coordinator JCET/ & NASA Goddard IERS Workshop on Conventions 2007 20-21 Sept. 2007, Sèvres, France Overview The ILRS Network Geometry
Real-time zenith tropospheric delays in support of numerical weather prediction applications
 Real-time zenith tropospheric delays in support of numerical weather prediction applications Jan Dousa a,, Pavel Vaclavovic a a NTIS New Technologies for Information Society Research Institute of Geodesy,
Real-time zenith tropospheric delays in support of numerical weather prediction applications Jan Dousa a,, Pavel Vaclavovic a a NTIS New Technologies for Information Society Research Institute of Geodesy,
Approximation of ambiguity covariance matrix for integer de-correlation procedure in single-epoch GNSS positioning
 he 9 th International Conference ENVIRONMENAL ENGINEERING 22 23 May 24, Vilnius, Lithuania SELECED PAPERS eissn 229-792 / eisbn 978-69-457-64-9 Available online at http://enviro.vgtu.lt Section: echnologies
he 9 th International Conference ENVIRONMENAL ENGINEERING 22 23 May 24, Vilnius, Lithuania SELECED PAPERS eissn 229-792 / eisbn 978-69-457-64-9 Available online at http://enviro.vgtu.lt Section: echnologies
The Usefulness of WADGPS Satellite Orbit and Clock Corrections for Dual-Frequency Precise Point Positioning
 The Usefulness of WADGPS Satellite Orbit and Clock Corrections for Dual-Frequency Precise Point Positioning Hyunho Rho and Richard B. Langley Department of Geodesy and Geomatics Engineering, University
The Usefulness of WADGPS Satellite Orbit and Clock Corrections for Dual-Frequency Precise Point Positioning Hyunho Rho and Richard B. Langley Department of Geodesy and Geomatics Engineering, University
Recent GNSS Developments and Reference Frame Issues in Turkey. Onur LENK and Bahadir AKTUĞ
 Recent GNSS Developments and Reference Frame Issues in Turkey Onur LENK and Bahadir AKTUĞ General Command of Mapping onur.lenk lenk@hgk.mil.tr 1/31 GPS STUDIES İN TURKEY date back to early 1990s geodynamics-oriented
Recent GNSS Developments and Reference Frame Issues in Turkey Onur LENK and Bahadir AKTUĞ General Command of Mapping onur.lenk lenk@hgk.mil.tr 1/31 GPS STUDIES İN TURKEY date back to early 1990s geodynamics-oriented
The e-vlbi Progress in Chinese VLBI Network
 The e-vlbi Progress in Chinese VLBI Network Zhang Xiuzhong, CAS 1 Nov 2005 CANS 2005 Outline: 1. About VLBI 2. e-vlbi progress 3. The e-vlbi test in CVN 4. The near future plan of e-vlbi for CVN Traditional
The e-vlbi Progress in Chinese VLBI Network Zhang Xiuzhong, CAS 1 Nov 2005 CANS 2005 Outline: 1. About VLBI 2. e-vlbi progress 3. The e-vlbi test in CVN 4. The near future plan of e-vlbi for CVN Traditional
Estimation of tectonic velocities using GPS Precise Point Positioning: The case of Hellenic RTK network HEPOS
 Estimation of tectonic velocities using GPS Precise Point Positioning: The case of Hellenic RTK network HEPOS M. Gianniou, I. Stavropoulou National Cadastre and Mapping Agency S.A. Mesogion Ave. 288, 15562
Estimation of tectonic velocities using GPS Precise Point Positioning: The case of Hellenic RTK network HEPOS M. Gianniou, I. Stavropoulou National Cadastre and Mapping Agency S.A. Mesogion Ave. 288, 15562
Performance Evaluation of Integrated GPS/GIOVE Precise Point Positioning
 Performance Evaluation of Integrated /GIOVE Precise Point Positioning Wei Cao 1, André Hauschild 2, Peter Steigenberger 3, Richard B. Langley 1, Landon Urquhart 1, Marcelo Santos 1, and Oliver Montenbruck
Performance Evaluation of Integrated /GIOVE Precise Point Positioning Wei Cao 1, André Hauschild 2, Peter Steigenberger 3, Richard B. Langley 1, Landon Urquhart 1, Marcelo Santos 1, and Oliver Montenbruck
Lecture 2 Measurement Systems. GEOS 655 Tectonic Geodesy
 Lecture 2 Measurement Systems GEOS 655 Tectonic Geodesy VLBI and SLR VLBI Very Long Baseline Interferometry SLR Satellite Laser Ranging Very Long Baseline Interferometry VLBI Geometric Delay δg S Baseline
Lecture 2 Measurement Systems GEOS 655 Tectonic Geodesy VLBI and SLR VLBI Very Long Baseline Interferometry SLR Satellite Laser Ranging Very Long Baseline Interferometry VLBI Geometric Delay δg S Baseline
Operational Aspects of GNSS CORS What is a GNSS CORS system used for?
 Please insert a picture (Insert, Picture, from file). Size according to grey field (10 cm x 25.4 cm). Scale picture: highlight, pull corner point Cut picture: highlight, choose the cutting icon from the
Please insert a picture (Insert, Picture, from file). Size according to grey field (10 cm x 25.4 cm). Scale picture: highlight, pull corner point Cut picture: highlight, choose the cutting icon from the
Trimble RTX TM Orbit Determination and User Positioning Performance with BeiDou Satellites
 Nick Talbot, Xiaoming Chen, Nico Reussner, Markus Brandl, Markus Nitschke, Carlos Rodriguez-Solano, Feipeng Zhang Trimble Terrasat GmbH IGNSS 2016, SYDNEY, AUSTRALIA Trimble RTX TM Orbit Determination
Nick Talbot, Xiaoming Chen, Nico Reussner, Markus Brandl, Markus Nitschke, Carlos Rodriguez-Solano, Feipeng Zhang Trimble Terrasat GmbH IGNSS 2016, SYDNEY, AUSTRALIA Trimble RTX TM Orbit Determination
Impact of a priori zenith hydrostatic delay errors on GPS estimates of station heights and zenith total delays
 Click Here for Full Article GEOPHYSICAL RESEARCH LETTERS, VOL. 33, L23303, doi:10.1029/2006gl027706, 2006 Impact of a priori zenith hydrostatic delay errors on GPS estimates of station heights and zenith
Click Here for Full Article GEOPHYSICAL RESEARCH LETTERS, VOL. 33, L23303, doi:10.1029/2006gl027706, 2006 Impact of a priori zenith hydrostatic delay errors on GPS estimates of station heights and zenith
Evaluation of the impact of atmospheric pressure loading modeling on GNSS data analysis
 Evaluation of the impact of atmospheric pressure loading modeling on GNSS data analysis R. Dach a, J. Böhm b, S. Lutz a, and P. Steigenberger c a Astronomical Institute, University of Bern, Bern, Switzerland
Evaluation of the impact of atmospheric pressure loading modeling on GNSS data analysis R. Dach a, J. Böhm b, S. Lutz a, and P. Steigenberger c a Astronomical Institute, University of Bern, Bern, Switzerland
Principles of the Global Positioning System Lecture 14
 12.540 Principles of the Global Positioning System Lecture 14 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 Propagation Medium Propagation: Signal propagation from satellite to receiver Light-time
12.540 Principles of the Global Positioning System Lecture 14 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 Propagation Medium Propagation: Signal propagation from satellite to receiver Light-time
Introduction to geodetic VLBI
 Introduction to geodetic VLBI David Mayer Andreas Hellerschmied Johannes Böhm Harald Schuh and Johannes Böhm, Very Long Baseline Interferometry for Geodesy and Astrometry, in Guochang Xu (editor): Sciences
Introduction to geodetic VLBI David Mayer Andreas Hellerschmied Johannes Böhm Harald Schuh and Johannes Böhm, Very Long Baseline Interferometry for Geodesy and Astrometry, in Guochang Xu (editor): Sciences
Solid Earth Deformations Induced by the Sumatra Earthquakes of : GPS Detection of Co-Seismic Displacements
 Solid Earth Deformations Induced by the Sumatra Earthquakes of 2-25: GPS Detection of Co-Seismic Displacements and Tsunami-Induced Loading H.-P. Plag, G. Blewitt, C. Kreemer, W.C. Haond Nevada Bureau of
Solid Earth Deformations Induced by the Sumatra Earthquakes of 2-25: GPS Detection of Co-Seismic Displacements and Tsunami-Induced Loading H.-P. Plag, G. Blewitt, C. Kreemer, W.C. Haond Nevada Bureau of
Dealing with significant differential tectonic plate velocities within an RTK-network: The case of HEPOS
 Dealing with significant differential tectonic plate velocities within an RTK-network: The case of HEPOS M. Gianniou, E. Mitropoulou, I. Stavropoulou National Cadastre and Mapping Agency S.A. Mesogion
Dealing with significant differential tectonic plate velocities within an RTK-network: The case of HEPOS M. Gianniou, E. Mitropoulou, I. Stavropoulou National Cadastre and Mapping Agency S.A. Mesogion
SCIENTIFIC REPORT NERC GEF
 SCIENTIFIC REPORT NERC GEF Loan 927 Measuring changes in the dynamics of Pine Island Glacier, Antarctica A.M. Smith & E.C. King, British Antarctic Survey (BAS) pp J.B.T. Scott ABSTRACT A brief period of
SCIENTIFIC REPORT NERC GEF Loan 927 Measuring changes in the dynamics of Pine Island Glacier, Antarctica A.M. Smith & E.C. King, British Antarctic Survey (BAS) pp J.B.T. Scott ABSTRACT A brief period of
CODE's multi-gnss orbit and clock solution
 source: https://doi.org/10.7892/boris.68193 downloaded: 13.3.2017 CODE's multi-gnss orbit and clock solution L. Prange, E. Orliac, R. Dach, D. Arnold, G. Beutler, S. Schaer, A. Jäggi Astronomical Institute,
source: https://doi.org/10.7892/boris.68193 downloaded: 13.3.2017 CODE's multi-gnss orbit and clock solution L. Prange, E. Orliac, R. Dach, D. Arnold, G. Beutler, S. Schaer, A. Jäggi Astronomical Institute,
TIDAL EFFECTS IN GPS/GLONASS DATA PROCESSING
 TIDAL EFFECTS IN GPS/GLONASS DATA PROCESSING R. Weber (1), Carine Bruyninx, H.G. Scherneck, M. Rothacher,P.H. Andersen, T.F. Baker, T. van Dam (1)Institute of Geodesy and Geophysics, TU-Vienna, Gusshausstr.27-29,A-1040
TIDAL EFFECTS IN GPS/GLONASS DATA PROCESSING R. Weber (1), Carine Bruyninx, H.G. Scherneck, M. Rothacher,P.H. Andersen, T.F. Baker, T. van Dam (1)Institute of Geodesy and Geophysics, TU-Vienna, Gusshausstr.27-29,A-1040
Noise Characteristics in High Precision GPS Positioning
 Noise Characteristics in High Precision GPS Positioning A.R. Amiri-Simkooei, C.C.J.M. Tiberius, P.J.G. Teunissen, Delft Institute of Earth Observation and Space systems (DEOS), Delft University of Technology,
Noise Characteristics in High Precision GPS Positioning A.R. Amiri-Simkooei, C.C.J.M. Tiberius, P.J.G. Teunissen, Delft Institute of Earth Observation and Space systems (DEOS), Delft University of Technology,
A new Solar Radiation Pressure Model for the GPS Satellites
 A new Solar Radiation Pressure Model for the GPS Satellites T.A. Springer, G. Beutler, M. Rothacher Astronomical Institute, University of Bern Sidlerstrasse 5, CH-3012 Bern, Switzerland Abstract The largest
A new Solar Radiation Pressure Model for the GPS Satellites T.A. Springer, G. Beutler, M. Rothacher Astronomical Institute, University of Bern Sidlerstrasse 5, CH-3012 Bern, Switzerland Abstract The largest
S E S S I O N 2 : R E A L - T I M E A P P L I C A T I O N S A N D P R O D U C T S
 I G S S E S S I O N 2 : R E A L - T I M E A P P L I C A T I O N S A N D P R O D U C T S 40 Position Paper for the Real Time Applications and Products Session Yoaz Bar-Sever, JPL, and John Dow, ESOC Guided
I G S S E S S I O N 2 : R E A L - T I M E A P P L I C A T I O N S A N D P R O D U C T S 40 Position Paper for the Real Time Applications and Products Session Yoaz Bar-Sever, JPL, and John Dow, ESOC Guided
Satellite Geodesy and Navigation Present and Future
 Satellite Geodesy and Navigation Present and Future Drazen Svehla Institute of Astronomical and Physical Geodesy Technical University of Munich, Germany Content Clocks for navigation Relativistic geodesy
Satellite Geodesy and Navigation Present and Future Drazen Svehla Institute of Astronomical and Physical Geodesy Technical University of Munich, Germany Content Clocks for navigation Relativistic geodesy
Experimental verification of Internet-based Global Differential GPS
 Experimental verification of Internet-based Global Differential GPS M.O. Kechine, C.C.J.M. Tiberius and H. van der Marel Section of Mathematical Geodesy and Positioning (MGP) Delft University of Technology
Experimental verification of Internet-based Global Differential GPS M.O. Kechine, C.C.J.M. Tiberius and H. van der Marel Section of Mathematical Geodesy and Positioning (MGP) Delft University of Technology
Week 02. Assist. Prof. Dr. Himmet KARAMAN
 Week 02 Assist. Prof. Dr. Himmet KARAMAN Contents Satellite Orbits Ephemerides GPS Review Accuracy & Usage Limitation Reference Systems GPS Services GPS Segments Satellite Positioning 2 Satellite Orbits
Week 02 Assist. Prof. Dr. Himmet KARAMAN Contents Satellite Orbits Ephemerides GPS Review Accuracy & Usage Limitation Reference Systems GPS Services GPS Segments Satellite Positioning 2 Satellite Orbits
Monthly Magnetic Bulletin
 BRITISH GEOLOGICAL SURVEY Fort McMurray Observatory Monthly Magnetic Bulletin February 2016 16/02/FM Fort McMurray FORT McMURRAY OBSERVATORY MAGNETIC DATA 1. Introduction The British Geological Survey
BRITISH GEOLOGICAL SURVEY Fort McMurray Observatory Monthly Magnetic Bulletin February 2016 16/02/FM Fort McMurray FORT McMURRAY OBSERVATORY MAGNETIC DATA 1. Introduction The British Geological Survey
ORBIT DETERMINATION THROUGH GLOBAL POSITIONING SYSTEMS: A LITERATURE SURVEY
 ORBIT DETERMINATION THROUGH GLOBAL POSITIONING SYSTEMS: A LITERATURE SURVEY ABDUL MANARVI, MASTER S STUDENT DEPARTMENT OF AEROSPACE ENGINEERING EMBRY-RIDDLE AERONAUTICAL UNIVERSITY DAYTONA BEACH, FL, U.S.A
ORBIT DETERMINATION THROUGH GLOBAL POSITIONING SYSTEMS: A LITERATURE SURVEY ABDUL MANARVI, MASTER S STUDENT DEPARTMENT OF AEROSPACE ENGINEERING EMBRY-RIDDLE AERONAUTICAL UNIVERSITY DAYTONA BEACH, FL, U.S.A
Monthly Magnetic Bulletin
 BRITISH GEOLOGICAL SURVEY Ascension Island Observatory Monthly Magnetic Bulletin March 2017 17/03/AS Crown copyright; Ordnance Survey ASCENSION ISLAND OBSERVATORY MAGNETIC DATA 1. Introduction Ascension
BRITISH GEOLOGICAL SURVEY Ascension Island Observatory Monthly Magnetic Bulletin March 2017 17/03/AS Crown copyright; Ordnance Survey ASCENSION ISLAND OBSERVATORY MAGNETIC DATA 1. Introduction Ascension
Monthly Magnetic Bulletin
 BRITISH GEOLOGICAL SURVEY Fort McMurray Observatory Monthly Magnetic Bulletin March 2017 17/03/FM Fort McMurray FORT McMURRAY OBSERVATORY MAGNETIC DATA 1. Introduction The British Geological Survey (BGS)
BRITISH GEOLOGICAL SURVEY Fort McMurray Observatory Monthly Magnetic Bulletin March 2017 17/03/FM Fort McMurray FORT McMURRAY OBSERVATORY MAGNETIC DATA 1. Introduction The British Geological Survey (BGS)
COMPARISON OF COSEISMIC DISPLACEMENTS OBTAINED FROM STRONG MOTION ACCELEROGRAMS AND GPS DATA IN JAPAN
 COMPARISON OF COSEISMIC DISPLACEMENTS OBTAINED FROM STRONG MOTION ACCELEROGRAMS AND GPS DATA IN JAPAN Fumio YAMAZAKI 1, Luis MOYA 2, Kiminobu ANEKOJI 3 and Wen LIU 4 ABSTRACT Strong motion seismometers
COMPARISON OF COSEISMIC DISPLACEMENTS OBTAINED FROM STRONG MOTION ACCELEROGRAMS AND GPS DATA IN JAPAN Fumio YAMAZAKI 1, Luis MOYA 2, Kiminobu ANEKOJI 3 and Wen LIU 4 ABSTRACT Strong motion seismometers
Evaluation of height network in Latvia
 Evaluation of height network in Latvia Kaminskis J. (,), Balodis J. (), Janpaule I. (,), Normand M. (,), Rubans A. (), Silabriedis G. (,), Zvirgzds J. (,) AFFILIATION: () Riga Technical University; ()
Evaluation of height network in Latvia Kaminskis J. (,), Balodis J. (), Janpaule I. (,), Normand M. (,), Rubans A. (), Silabriedis G. (,), Zvirgzds J. (,) AFFILIATION: () Riga Technical University; ()
Characteristics of GPS ZTD products. Jan Douša EUREF Analysis Centre Workshop
 Characteristics of GPS ZTD products Jan Douša EUREF Analysis Centre Workshop March 15-16, 2006 Outline ZTD and PWV products Stragegy changes GPS constellation effect solution characteristics ZTD differences
Characteristics of GPS ZTD products Jan Douša EUREF Analysis Centre Workshop March 15-16, 2006 Outline ZTD and PWV products Stragegy changes GPS constellation effect solution characteristics ZTD differences
ON THE ACCURACY OF CURRENT MEAN SEA SURFACE MODELS FOR THE USE WITH GOCE DATA
 ON THE ACCURACY OF CURRENT MEAN SEA SURFACE MODELS FOR THE USE WITH GOCE DATA Ole B. Andersen 1, M-.H., Rio 2 (1) DTU Space, Juliane Maries Vej 30, Copenhagen, Denmark (2) CLS, Ramon St Agne, France ABSTRACT
ON THE ACCURACY OF CURRENT MEAN SEA SURFACE MODELS FOR THE USE WITH GOCE DATA Ole B. Andersen 1, M-.H., Rio 2 (1) DTU Space, Juliane Maries Vej 30, Copenhagen, Denmark (2) CLS, Ramon St Agne, France ABSTRACT
Earthquake distribution is not random: very narrow deforming zones (= plate boundaries) versus large areas with no earthquakes (= rigid plate
 versus large areas with no earthquakes (= rigid plate") Earthquake distribution is not random: very narrow deforming zones (= plate boundaries) versus large areas with no earthquakes (= rigid plate interiors) Tectonic plates and their boundaries today -- continents
Earthquake distribution is not random: very narrow deforming zones (= plate boundaries) versus large areas with no earthquakes (= rigid plate interiors) Tectonic plates and their boundaries today -- continents
Utilization RT-PPP in Order to Speed Up Land Parcel Registration in Indonesia Case Study Applied Trimble CenterPoint RTX in Sumatera and Java
 Utilization RT-PPP in Order to Speed Up Land Parcel Registration in Indonesia Case Study Applied Trimble CenterPoint RTX in Sumatera and Java Heri Andreas Irwan Gumilar Redy Kwee GEODESY RESEARCH GROUP
Utilization RT-PPP in Order to Speed Up Land Parcel Registration in Indonesia Case Study Applied Trimble CenterPoint RTX in Sumatera and Java Heri Andreas Irwan Gumilar Redy Kwee GEODESY RESEARCH GROUP
TOWARDS ROBUST LOCALIZATION OF RTK-GPS TOPOGRAPHIC SURVEYS 23
 TOWARDS ROBUST LOCALIZATION OF RTK-GPS TOPOGRAPHIC SURVEYS Jerry W. Nave, North Carolina A&T University; Tarig A. Ali, American University of Sharjah Abstract Localization is performed to fit the observed
TOWARDS ROBUST LOCALIZATION OF RTK-GPS TOPOGRAPHIC SURVEYS Jerry W. Nave, North Carolina A&T University; Tarig A. Ali, American University of Sharjah Abstract Localization is performed to fit the observed
A new Solar Radiation Pressure Model for the GPS Satellites
 A new Solar Radiation Pressure Model for the GPS Satellites T.A. Springer, G. Beutler, M. Rothacher Astronomical Institute, University of Bern Sidlerstrasse 5, CH-32 Bern, Switzerland Abstract The largest
A new Solar Radiation Pressure Model for the GPS Satellites T.A. Springer, G. Beutler, M. Rothacher Astronomical Institute, University of Bern Sidlerstrasse 5, CH-32 Bern, Switzerland Abstract The largest
Publ. Astron. Obs. Belgrade No. 91 (2012), REALIZATION OF ETRF2000 AS A NEW TERRESTRIAL REFERENCE FRAME IN REPUBLIC OF SERBIA
, REALIZATION OF ETRF2000 AS A NEW TERRESTRIAL REFERENCE FRAME IN REPUBLIC OF SERBIA") Publ. Astron. Obs. Belgrade No. 91 (2012), 199-206 Contributed paper REALIZATION OF ETRF2000 AS A NEW TERRESTRIAL REFERENCE FRAME IN REPUBLIC OF SERBIA D. BLAGOJEVIĆ and V. VASILIĆ Faculty of Civil Engineering,
Publ. Astron. Obs. Belgrade No. 91 (2012), 199-206 Contributed paper REALIZATION OF ETRF2000 AS A NEW TERRESTRIAL REFERENCE FRAME IN REPUBLIC OF SERBIA D. BLAGOJEVIĆ and V. VASILIĆ Faculty of Civil Engineering,
Exploitation of ground based GPS for Climate and Numerical Weather Prediction applications COST action 716
 Exploitation of ground based GPS for Climate and Numerical Weather Prediction applications COST action 716 COST Objectives and status of COST 716 Overview of work packages / projects Near real-time demonstration
Exploitation of ground based GPS for Climate and Numerical Weather Prediction applications COST action 716 COST Objectives and status of COST 716 Overview of work packages / projects Near real-time demonstration
Modeling and Observation of Loading Contribution to Time-Variable GPS Site Positions
 EGU2009-3768 Session G4 EGU General Assembly 2009 Vienna, Austria, 19 24 April 2009 Modeling and Observation of Loading Contribution to Time-Variable GPS Site Positions Are we able to Detect and Identify
EGU2009-3768 Session G4 EGU General Assembly 2009 Vienna, Austria, 19 24 April 2009 Modeling and Observation of Loading Contribution to Time-Variable GPS Site Positions Are we able to Detect and Identify