March 25, 2010 CHAPTER 2: LIMITS AND CONTINUITY OF FUNCTIONS IN EUCLIDEAN SPACE
|
|
|
- Stella Lawson
- 5 years ago
- Views:
Transcription
1 March 25, 2010 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE 1. calar product in R n Definition 1.1. Given x = (x 1,..., x n ), y = (y 1,..., y n ) R n,we define their scalar product as n x y = x, y = x i y i Example 1.2. (2, 1, 3) ( 1, 0, 2) = = 4 Remark 1.3. x y = y x. Definition 1.4. Given x = (x 1,, x n ) R n we define its norm as x = x x = x x2 n Example 1.5. Example: ( 1, 0, 3) = 10 i=1 Remark 1.6. ome interpretations of the norm are: The norm x is the distance from x to the origin. We may also interpret x as the length of the vector x. The norm x y is the distance between x and y. Remark 1.7. Let θ be the angle between u and v. Then, cos θ = u v u v The Euclidean space R n Definition 2.1. Given p R n and r > 0 we define the open ball of center p and radius r as the set B(p, r) = {y R n : p y < r} and the closed ball of center p and radius r as the set B(p, r) = {y R n : p y r} Remark 2.2. Recall that p y is distance from p to y. For n = 1, we have that B(p, r) = (p r, p + r) and B(p, r) = [p r, p + r]. 1
2 2 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE [ ] ( ) p - r p p + r p - r p p + r B(p,r) B(p,r) For n = 2, 3 the closed balls are n = 2 n = 3 For n = 2, 3 the open balls are n = 2 n = 3 Definition 2.3. Let R n. We say that p R n is interior to if there is some r > 0 such that B(p, r). Notation: is set of interior points of. Remark 2.4. Note that because p B(p, r) for any r > 0. Example 2.5. Consider R 2, = [1, 2] [1, 2]. Then, = (1, 2) (1, 2).
3 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE º Example 2.6. Consider = [ 1, 1] {3} R. Then, = ( 1, 1). [ º ] ( ) Definition 2.7. A subset R n is open if = Example 2.8. In R, the set = ( 1, 1) is open, T = ( 1, 1] is not. ( ) ( T ] º = T º = ( ) Example 2.9. The set = {(x, 0) : 1 < x < 1} is not open in R 2. ( ( )) ( ) n = 1 n = 2
4 4 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE You should compare this with the previous example Example The open ball B(p, r) is an open set. Example The closed ball B(p, r) is not an open set, because B(p, r)= B(p, r). B(p,r) º B(p,r) = B(p,r) Example Consider the set = {(x, y) R 2 : x 2 + y 2 1, x y}. Then, = {(x, y) R 2 : x 2 + y 2 < 1, x y}. o, is not open. º Proposition is the largest open set contained in. (That is is open, and if A is open, then A ). Definition Let R n. A point p R n is in the closure of if for any r > 0 we have that B(p, r). Notation: is the set of points in the closure of. Example Consider the set = [1, 2) R. Then, the points 1, 2. But, 3 /.
5 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE 5 [ ) ( ) Example Consider the set = B ((0, 0), 1) R 2. Then, the point (1, 0). But, the point (1, 1) /. (1,1) (1,0) Example Let = [0, 1], T = (0, 1). Then, = T = [0, 1]. Example Let = {(x, y) R 2 : x 2 + y 2 1, x y}. Then, = B ((0, 0), 1). Example B(p, r) is the closure of the open unit ball B(p, r). Remark Definition A set F R n is closed if F = F. Proposition A set F R n is closed if and only if R n \ F is open. Example The set [1, 2] R is closed. But, the set [1, 2) R is not. Example The set B(p, r)is closed. But, the set B(p, r) is not. Example The set = {(x, y) R 2 : x 2 + y 2 1, x y}is not closed. Proposition The closure of is the smallest closed set that contains. (That is is closed, and if F is another closed set that contains, then F ). Definition Let R n, we say that p R n is a boundary point of if for any positive radius r > 0, we have that, (1) B(p, r). (2) B(p, r) (R n \ ). Notation: The set of boundary points of is denoted by.
6 6 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE Example Let = [1, 2), T = (1, 2). Then, = T = {1, 2}. [ ) 1 2 ( T ) 1 2 = 1 2 T Example Let = [ 1, 1] {3} R. Then, = { 1, 1, 3}. [ ] Example Let R 2, = [1, 2] [1, 2]. Then, is Example = {(x, y) R 2 : x 2 + y 2 1, x y}. Then, = {(x, y) : x 2 + y 2 = 1} {(x, y) R 2 : x 2 + y 2 1, x = y}. The above concepts are related in the following Proposition. Proposition Let R n, then (1) = \ (2) = (3) = R n \. (4) is closed = (5) is open = =. Proposition (1) The finite intersection of open (closed) sets is also open (closed). (2) The finite union of open (closed) sets is also open (closed).
7 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE 7 Definition A set R n is bounded if there is some R > 0 such that B(0, R). Example The straight line V = {(x, y, z) R 3 : x y = 0, z = 0} is not a bounded set. Example The ball B(p, R) of center p and radius R is bounded. Definition A subset R n is compact if is closed and bounded. Example = {(x, y) R 2 : x 2 + y 2 1, x y} is not compact (bounded, but not closed). Example B(p, R) is not compact (bounded, but not closed). Example B(p, R) is compact. Example (0, 1] is not compact. [0, 1] is compact. Example [0, 1] [0, 1] is compact. Definition A subset R n is convex if for any x, y and λ [0, 1] we have that λ x + (1 λ) y. Example Let A a matrix of order n m and let b R m. We define = {x R n : Ax = b} as the set of solutions of the linear system of equations Ax = b. Let x, y, be two solutions of this linear system of equations. Then, we have that Ax = Ay = b. If we now take any 0 t 1 (indeed any t R) then A(tx + (1 t)y) = tax + (1 t)ay = tb + (1 t)b = b that is, tx + (1 t)y so the set of solutions of a linear system of equations is a convex set. Example {(x, y) R 2 : x 2 + y 2 1, x y} is not a convex set. x y
8 8 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE We study now functions f : R n R 3. Function of several variables Example 3.1. f : R 2 R defined by f(x, y) = x + y 1 also f : R 3 R defined by f(x, y) = x sin y also f : R 4 R defined by f(x, y, z) = x 2 + y z 2 f(x, y, z) = z exp x 2 + y 2 f(x, y, z, t) = sin x + y + z exp t. Occasionally, we will consider functions f : R n R m like, for example, f : R 3 R 2 defined by f(x, y, z) = (x exp y + sin z, x 2 + y 2 z 2 ) But, if we write f(x, y, z) = (f 1 (x, y, z), f 2 (x, y, z)) with f 1 (x, y, z) = x exp y + sin z, f 2 (x, y, z) = x 2 + y 2 z 2 Then, f(x, y, z) = (f 1 (x, y, z), f 2 (x, y, z)). o, we may just focus on functions f : R n R. Remark 3.2. When we write x + y + 1 f(x, y, z) = x 1 it is understood that x 1. That is the expression of f defines implicitly the domain of the function. For example, for the above function we need that x + y and x 1. o, we assume implicitely that the domain of f(x, y, z) = x+y+1 x 1 is the set D = {(x, y) R 2 : x + y 1, x 1} Usually we will write f : D R n R to make explicit the domain of f. Definition 3.3. Given f : D R n R we define the graph of f as G(f) = {(x, y) R n+1 : y = f(x), x D} Remark that the graph can be drawn only for n = 1, 2. Example 3.4. The graph of f(x, y) = x 2 + y 2 is


9 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE 9 Example 3.5. The graph of f(x, y) = x 2 y 2 is Example 3.6. The graph of f(x, y) = 2x + 3y is
 = x 2 + y 2 are The arrows point in the direction in which the function f grows.")
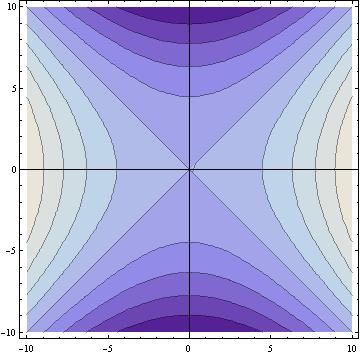
10 10 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE 4. Level curves and level surfaces Definition 4.1. Given f : D R n R and k R we define the level surface of f as the set C k = {x D : f(x) = k}. If n = 2, the level surface is called a level curve. Example 4.2. The level curves of f(x, y) = x 2 + y 2 are The arrows point in the direction in which the function f grows. Example 4.3. The level curves of f(x, y) = x 2 y 2 are The arrows point in the direction in which the function f grows. Example 4.4. The level curves of f(x, y) = 2x + 3y are
 = L x p if given ε > 0 there is some δ > 0 such that f(x) L < ε whenever 0 < x p < δ.")
11 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE 11 The arrows point in the direction in which the function f grows. 5. Limits and continuity Definition 5.1. Let f : D R n R and let L R, p R n. We say that lim f(x) = L x p if given ε > 0 there is some δ > 0 such that f(x) L < ε whenever 0 < x p < δ. This is the natural generalization of the concept of limit for one-variable functions to functions of several variables, once we remark that the distance in R is replaced by the distance in R n ). Note that interpretation is the same, i.e., x y is the distance from x to y in R and x y is the distance from x to y in R n. Proposition 5.2. Let f : R n R and suppose there are two numbers, L 1 and L 2 that satisfy the above definition of limit. That is, L 1 = lim x p f(x) and L 2 = lim x p f(x). Then, L 1 = L 2 Remark 5.3. The calculus of limits with several variables is more complicated than the calculus of limits with one variable. Example 5.4. Consider the function f(x, y) = { (x 2 + y 2 ) cos( 1 x 2 +y 2 ) if (x, y) (0, 0), 0 if (x, y) = (0, 0).
 < δ, where f(x, y) < ε (x, y) = x 2 + y 2 o, fix ε > 0 and take δ = ε > 0.")
12 12 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE We will show that lim f(x, y) = 0 (x,y) (0,0) In the above definition of limit we take L = 0, p = (0, 0). We have to show that given ε > 0 there is some δ > 0 such that whenever 0 < (x, y) < δ, where f(x, y) < ε (x, y) = x 2 + y 2 o, fix ε > 0 and take δ = ε > 0. uppose that then, 0 < (x, y) = x 2 + y 2 < δ = ε x 2 + y 2 < ε and (x, y) (0, 0) so, f(x, y) = (x2 + y 2 1 ) cos( x 2 + y 2 ) < ε 1 cos( x 2 + y 2 ) ε where we have used that cos(z) 1 for any z R. It follows that lim (x,y) (0,0) f(x, y) = 0. Remark 5.5. The above definition of limit needs to be modified to take care of the case in which there are no points x D (where D is the domain of f) such that 0 < p x < δ For example, what is lim x 1 ln(x)? To avoid formal complication, we will only study lim x p f(x) for the cases in which the set {x D : 0 < p x < δ}, for every δ > 0 Definition 5.6. : A map σ(t) : (a, b) R n is called a curve in R n. Example 5.7. σ(t) = (2t, t + 1), t R.
13 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE Example 5.8. σ(t) = (cos(t), sin(t)), t R Example 5.9. σ(t) = (cos(t), sin(t), t), σ : R R Proposition Let p D R n and f : D R n R. Consider a curve σ : [ ε, ε] D such that σ(t) p whenever t 0 and lim t 0 σ(t) = p. uppose, lim x p f(x) = L. Then, lim t 0 f(σ(t)) = L Remark The previous proposition is useful to prove that a limit does not exist or to compute that value of the limit if we know in advance that the limit exists. But, it cannot be used to prove that a limit exists since one of the hypotheses of the proposition is that the limit exists. Remark Let f : D R 2 R. Let p = (a, b) consider the following particular curves σ 1 (t) = (a + t, b) Note that so, if then, we must also have σ 2 (t) = (a, b + t) lim σ i(t) = (a, b) i = 1, 2 t 0 lim f(x, y) = L (x,y) (a,b) lim f(x, b) = lim f(a, y) = L x a y b
14 14 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE Remark Iterated limits uppose that lim (x,y) (a,b) f(x, y) = L and that the following one-dimensional limits lim f(x, y) x a f(x, y) lim y b exist for (x, y) in a ball B((a, b), R). Define the functions g 1 (y) = lim x a f(x, y) g 2 (x) = lim y b f(x, y) Then, ( lim x a lim y b ) f(x, y) = lim g 2 (x) = L x a lim y b ( ) lim f(x, y) = lim g 1 (y) = L x a y b Again, this has applications to compute the value of a limit if we know beforehand that it exists. Also, if for some function f(x, y) we can prove that lim lim f(x, y) lim lim f(x, y) x a y b y b x a then lim (x,y) (a,b) f(x, y) does not exist. But, the above relations cannot be used to prove that lim (x,y) (a,b) f(x, y) exists. Example Consider the function, f(x, y) = { x 2 y 2 x 2 +y 2 if (x, y) (0, 0), 0 if (x, y) = (0, 0).
 (0,0) x 2 + y 2 does not exist. Example 5.15. Consider the function, f(x, y) = { xy x 2 +y 2 if (x, y) (0, 0), 0 if (x, y) = (0, 0).")
15 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE 15 Note that lim lim x 2 f(x, y) = lim f(x, 0) = lim x 0 y 0 x 0 x 0 x 2 = 1 but, lim lim y 2 f(x, y) = lim f(0, y) = lim y 0 x 0 y 0 y 0 y 2 = 1 Hence, the limit x 2 y 2 lim (x,y) (0,0) x 2 + y 2 does not exist. Example Consider the function, f(x, y) = { xy x 2 +y 2 if (x, y) (0, 0), 0 if (x, y) = (0, 0).
 = (t, t) and compute lim t 0 f(σ(t)) = lim f(t, t) = lim t 0 t 0 t 2 2t 2 = 1 2 does not coincide with the value of the iterated limits.")
16 16 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE Note that the iterated limits lim lim f(x, y) = lim x 0 y 0 x 0 lim lim f(x, y) = lim y 0 x 0 y 0 0 x 2 = 0 0 y 2 = 0 coincide. But, if we consider the curve, σ(t) = (t, t) and compute lim t 0 f(σ(t)) = lim f(t, t) = lim t 0 t 0 t 2 2t 2 = 1 2 does not coincide with the value of the iterated limits. Hence, the limit lim (x,y) (0,0) xy x 2 + y 2 does not exist. Example Let f(x, y) = { y if x > 0 y if x 0
 = x 2 + y 2 < δ then, f(x, y) 0 = y = y 2 x 2 + y 2 < δ = ε Hence, lim f(x, y) = 0 (x,y) (0,0) But, we remark that lim x 0 f(x, y) does not exist for y 0.")
17 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE 17 We show first that lim (x,y) (0,0) f(x, y) = 0. To do this, consider any ε > 0 and take δ = ε. Now, if 0 < (x, y) = x 2 + y 2 < δ then, f(x, y) 0 = y = y 2 x 2 + y 2 < δ = ε Hence, lim f(x, y) = 0 (x,y) (0,0) But, we remark that lim x 0 f(x, y) does not exist for y 0. This so, because if y 0 then the limits lim f(x, y) = y x 0 + lim f(x, y) = y x 0 do not coincide. o, lim x 0 f(x, y) does not exist for y 0. Example Consider the function, f(x, y) = { x 2 y x 4 +y 2 if (x, y) (0, 0), 0 if (x, y) = (0, 0). whose graph is the following
 = (t, t) and compute t 3 lim f(t, t) = lim f(t, t) = lim t 0 t 0 t 0 t 4 + t 2 = 0 we see that it coincides with the value of the iterated limits.")
18 18 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE but, Note that lim lim 0 f(x, y) = lim f(x, 0) = lim x 0 y 0 x 0 x 0 x 4 = 0 lim lim 0 f(x, y) = lim f(0, y) = lim y 0 x 0 y 0 y 0 y 2 = 0 Moreover, if we consider the curve σ(t) = (t, t) and compute t 3 lim f(t, t) = lim f(t, t) = lim t 0 t 0 t 0 t 4 + t 2 = 0 we see that it coincides with the value of the iterated limits. Hence, one could wrongly conclude that the limit exists and lim (x,y) (0,0) x 2 y x 4 + y 2 = 0 But this is not true...because, if we now consider the curve σ(t) = (t, t 2 ) and compute lim f(t, t 0 t2 ) = lim f(t, t 2 ) = lim x 0 t 4 + t 4 = 1 2 Therefore, the limit x 2 y lim (x,y) (0,0) x 4 + y 2 does not exist. t 0 t 4 Theorem 5.18 (Algebra of limits). Consider two funcions f, g : D R n R and suppose lim f(x) = L 1, lim g(x) = L 2 x p x p Then, (1) lim x p (f(x) + g(x)) = L 1 + L 2. (2) lim x p (f(x) g(x)) = L 1 L 2.
19 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE 19 (3) lim x p f(x)g(x) = L 1 L 2. (4) If a R then lim x p af(x) = al 1. (5) If, in addition, L 2 0, then f(x) lim x p g(x) = L 1 L 2 6. Continuous Functions Definition 6.1. A function f : D R n R m is continuous at a point p D if lim x p f(x) = f(p). We say that f is continuous on D if its continuous at every point p D. Remark 6.2. Note that a function f : D R n R m is continuous at a point p D if and only if given ε > 0 there is some δ > 0 such that if x p verifies that x p δ, then f(x) f(p) ε. Remark 6.3. A function f : D R n R m can be written as f(x) = (f 1 (x),..., f m (x)) Then, the function f is continuous at p D if and only if for each i = 1,..., m the function f i is continuous at p. Hence, from now on we will concentrate on functions f : D R n R. 7. Operations with continuous functions Theorem 7.1. Let D R n and let f, g : D R be continuous at a point p in D. Then, (1) f + g is continuous at p. (2) fg is continuous at p. (3) if f(p) 0, then there is some open set U R n such that f(x) 0 for every x U D and g f : U D R is continuous at p. Theorem 7.2. Let f : D R n E (where E R m ) be continuous at p D and let g : E R k be continuous at f(p). Then, g f : D R k is continuous at p. Remark 7.3. The following are continuous funcions, (1) Polinomials (2) Trigonometric and exponentials functions. (3) Logarithms, in the domain where is defined. (4) Powers of funcions, in the domain where they are defined. 8. Continuity of functions and open/closed sets Theorem 8.1. Let D R n and let f : D R m. Then, the following are equivalent. (1) f is continuous on D. (2) If {x n } n=1 is a sequence in D which converges to a point p D, then the sequence {f(x n )} n=1 converges to f(p).
20 20 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE (3) For each open subset U of R m, the set f 1 (U) is open relative to D, that is, f 1 (U) = G D, for some open set G. (4) For each closed subset V of R m, the set f 1 (V ) is closed relative to D, that is, f 1 (V ) = F D, for some closed set F. Theorem 8.2. Let f : R n R m. Then, the following are equivalent. (1) f is continuous on R n. (2) For each open subset U de R m, the set f 1 (U) is open in R n. (3) For each closed subset V de R m, the set f 1 (V ) is closed in R n. Theorem 8.3. uppose that the functions f 1,..., f k : R n R are continuous. Let a i b i +, i = 1,..., k. Then, (1) The set {x R n : a i < f i (x) < b i, i = 1,..., k} is open. (2) The set {x R n : a i f i (x) b i, i = 1,..., k} is closed. 9. Extreme points and fixed points Definition 9.1. Let f : D R n R. We say that a point p D is a (1) global maximum of f on D if f(x) f(p), for any other x D. (2) global minimum of f on D if f(x) f(p), for any other x D. (3) local maximum of f on D if there is some δ > 0 such that f(x) f(p), for every x D B(p, δ). (4) local minimum of f on D if there is some δ > 0 such that f(x) f(p), for every x D B(p, δ). Example 9.2. In the following picture, the point A is a local maximum but not a global one. The point B is a (local and) global maximum A B Theorem 9.3 (Weiestrass Theorem). Let D R n be a compact subset of R n and let f : D R be continuous. Then, there are x 0, x 1 D such that for any x D f(x 0 ) f(x) f(x 1 ) That is, x 0 is a global minimum of f on D and x 1 is a global maximum of f on D. Theorem 9.4 (Brouwer s Theorem). Let D R n be a non-empty, compact and convex subset or R n. Let f : D D continuous then there is p D such that f(p) = p. Remark 9.5. If f(p) = p, then p is called a fixed point of f. Remark 9.6. Recall that
 A subset of R is closed and convex if and only if it is a closed interval. (3) A subset X of R is closed, convex and bounded if and only if X = [a, b]. Example 9.7.")
21 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE 21 (1) A subset of R is convex if and only if it is an interval. (2) A subset of R is closed and convex if and only if it is a closed interval. (3) A subset X of R is closed, convex and bounded if and only if X = [a, b]. Example 9.7. Any continuous function f : [a, b] [a, b] has a fixed point. Graphically, b a a b 10. Applications Example Consider the set A = {(x, y) R 2 : x 2 + y 2 2}. ince the function f(x, y) = x 2 + y 2 is continuous, the set A is closed. It is also bounded and hence the set A is compact. Considerer now the function f(x, y) = 1 x + y Its graphic is The function f is continuous except in the set X = {(x, y) R 2 : x + y = 0}. This set intersects A,
22 22 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE A X Taking y = 0, we see that lim f(x, 0) = + x 0 x>0 lim f(x, 0) = x 0 x<0 and we conclude that f attains neither a maximum nor a minimum on the set A. Example Consider the set B 0 = {(x, y) R 2 : xy 1}. ince the function f(x, y) = xy is continuous, the set B 0 is closed. ince the set B 0 is not bounded, it is not compact. Example How is the set B 1 = {(x, y) R 2 : xy 1, may not use directly the results above. But, we note that x, y > 0}? Now we B 1 = {(x, y) R 2 : xy 1, x, y > 0} = {(x, y) R 2 : xy 1, x, y 0} B 1 and since the functions f 1 (x, y) = xy, f 2 (x, y) = x y f 3 (x, y) = y are continuous, we conclude that the set B 1 is closed. Consider again the function f(x, y) = 1 x + y Does it attain a maximum or a minimum on the set B 1? Note that the function is continuous in the set B 1, we may not apply Weierstrass Theorem because B 1 is not compact.
23 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE 23 On the one hand, we see that f(x, y) > 0 in the set B 1. In addition, the points (n, n) for n = 1, 2,... belong to the set B 1 and lim f(n, n) = 0 n + Hence, given a point p B 1, we may find a natural number n large enough such that f(p) > f(n, n) > 0 And we conclude that f does not attain a minimum in the set B 1. The level curves {(x, y) R 2 : f(x, y) = c} of the function f(x, y) = 1 x + y are the straight lines x + y = 1 c Graphically, c = 1/2 c = - 1/2 c = - 2 c = - 1 c = 2 c = 1 The arrows point in the direction of growth of f. Graphically we see that f attains a maximum at the point of tangency with the set B 1. This is the point (1, 1).
24 24 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE B 1 Exercise imilarly, B 2 = {(x, y) R 2 : xy 1, x, y < 0} = {(x, y) R 2 : xy 1, x, y 0} is closed, but it is not compact. Argue that the function f(x, y) = 1 x + y is continuous on that set but it does not attain a maximum. On the other hand, it attains a minimum at the point ( 1, 1). Exercise The sets B 3 = {(x, y) R 2 : xy > 1, x, y > 0} and B 4 = {(x, y) R 2 : xy > 1, x, y < 0} are open sets. Why?
8 Further theory of function limits and continuity
 8 Further theory of function limits and continuity 8.1 Algebra of limits and sandwich theorem for real-valued function limits The following results give versions of the algebra of limits and sandwich theorem
8 Further theory of function limits and continuity 8.1 Algebra of limits and sandwich theorem for real-valued function limits The following results give versions of the algebra of limits and sandwich theorem
Convergence of sequences, limit of functions, continuity
 Convergence of sequences, limit of functions, continuity With the definition of norm, or more precisely the distance between any two vectors in R N : dist(x, y) 7 x y 7 [(x 1 y 1 ) 2 + + (x N y N ) 2 ]
Convergence of sequences, limit of functions, continuity With the definition of norm, or more precisely the distance between any two vectors in R N : dist(x, y) 7 x y 7 [(x 1 y 1 ) 2 + + (x N y N ) 2 ]
UNIVERSIDAD CARLOS III DE MADRID MATHEMATICS II EXERCISES (SOLUTIONS )
") UNIVERSIDAD CARLOS III DE MADRID MATHEMATICS II EXERCISES (SOLUTIONS ) CHAPTER : Limits and continuit of functions in R n. -. Sketch the following subsets of R. Sketch their boundar and the interior. Stud
UNIVERSIDAD CARLOS III DE MADRID MATHEMATICS II EXERCISES (SOLUTIONS ) CHAPTER : Limits and continuit of functions in R n. -. Sketch the following subsets of R. Sketch their boundar and the interior. Stud
Course 212: Academic Year Section 1: Metric Spaces
 Course 212: Academic Year 1991-2 Section 1: Metric Spaces D. R. Wilkins Contents 1 Metric Spaces 3 1.1 Distance Functions and Metric Spaces............. 3 1.2 Convergence and Continuity in Metric Spaces.........
Course 212: Academic Year 1991-2 Section 1: Metric Spaces D. R. Wilkins Contents 1 Metric Spaces 3 1.1 Distance Functions and Metric Spaces............. 3 1.2 Convergence and Continuity in Metric Spaces.........
1 Sets of real numbers
 1 Sets of real numbers Outline Sets of numbers, operations, functions Sets of natural, integer, rational and real numbers Operations with real numbers and their properties Representations of real numbers
1 Sets of real numbers Outline Sets of numbers, operations, functions Sets of natural, integer, rational and real numbers Operations with real numbers and their properties Representations of real numbers
Introduction to Topology
 Introduction to Topology Randall R. Holmes Auburn University Typeset by AMS-TEX Chapter 1. Metric Spaces 1. Definition and Examples. As the course progresses we will need to review some basic notions about
Introduction to Topology Randall R. Holmes Auburn University Typeset by AMS-TEX Chapter 1. Metric Spaces 1. Definition and Examples. As the course progresses we will need to review some basic notions about
Mathematics for Economists
 Mathematics for Economists Victor Filipe Sao Paulo School of Economics FGV Metric Spaces: Basic Definitions Victor Filipe (EESP/FGV) Mathematics for Economists Jan.-Feb. 2017 1 / 34 Definitions and Examples
Mathematics for Economists Victor Filipe Sao Paulo School of Economics FGV Metric Spaces: Basic Definitions Victor Filipe (EESP/FGV) Mathematics for Economists Jan.-Feb. 2017 1 / 34 Definitions and Examples
2 Sequences, Continuity, and Limits
 2 Sequences, Continuity, and Limits In this chapter, we introduce the fundamental notions of continuity and limit of a real-valued function of two variables. As in ACICARA, the definitions as well as proofs
2 Sequences, Continuity, and Limits In this chapter, we introduce the fundamental notions of continuity and limit of a real-valued function of two variables. As in ACICARA, the definitions as well as proofs
MTH4100 Calculus I. Lecture notes for Week 2. Thomas Calculus, Sections 1.3 to 1.5. Rainer Klages
 MTH4100 Calculus I Lecture notes for Week 2 Thomas Calculus, Sections 1.3 to 1.5 Rainer Klages School of Mathematical Sciences Queen Mary University of London Autumn 2009 Reading Assignment: read Thomas
MTH4100 Calculus I Lecture notes for Week 2 Thomas Calculus, Sections 1.3 to 1.5 Rainer Klages School of Mathematical Sciences Queen Mary University of London Autumn 2009 Reading Assignment: read Thomas
Introduction to Real Analysis Alternative Chapter 1
 Christopher Heil Introduction to Real Analysis Alternative Chapter 1 A Primer on Norms and Banach Spaces Last Updated: March 10, 2018 c 2018 by Christopher Heil Chapter 1 A Primer on Norms and Banach Spaces
Christopher Heil Introduction to Real Analysis Alternative Chapter 1 A Primer on Norms and Banach Spaces Last Updated: March 10, 2018 c 2018 by Christopher Heil Chapter 1 A Primer on Norms and Banach Spaces
B ɛ (P ) B. n N } R. Q P
 B. n N } R. Q P") 8. Limits Definition 8.1. Let P R n be a point. The open ball of radius ɛ > 0 about P is the set B ɛ (P ) = { Q R n P Q < ɛ }. The closed ball of radius ɛ > 0 about P is the set { Q R n P Q ɛ }. Definition
8. Limits Definition 8.1. Let P R n be a point. The open ball of radius ɛ > 0 about P is the set B ɛ (P ) = { Q R n P Q < ɛ }. The closed ball of radius ɛ > 0 about P is the set { Q R n P Q ɛ }. Definition
Topology Homework Assignment 1 Solutions
 Topology Homework Assignment 1 Solutions 1. Prove that R n with the usual topology satisfies the axioms for a topological space. Let U denote the usual topology on R n. 1(a) R n U because if x R n, then
Topology Homework Assignment 1 Solutions 1. Prove that R n with the usual topology satisfies the axioms for a topological space. Let U denote the usual topology on R n. 1(a) R n U because if x R n, then
ECARES Université Libre de Bruxelles MATH CAMP Basic Topology
 ECARES Université Libre de Bruxelles MATH CAMP 03 Basic Topology Marjorie Gassner Contents: - Subsets, Cartesian products, de Morgan laws - Ordered sets, bounds, supremum, infimum - Functions, image, preimage,
ECARES Université Libre de Bruxelles MATH CAMP 03 Basic Topology Marjorie Gassner Contents: - Subsets, Cartesian products, de Morgan laws - Ordered sets, bounds, supremum, infimum - Functions, image, preimage,
1 Directional Derivatives and Differentiability
 Wednesday, January 18, 2012 1 Directional Derivatives and Differentiability Let E R N, let f : E R and let x 0 E. Given a direction v R N, let L be the line through x 0 in the direction v, that is, L :=
Wednesday, January 18, 2012 1 Directional Derivatives and Differentiability Let E R N, let f : E R and let x 0 E. Given a direction v R N, let L be the line through x 0 in the direction v, that is, L :=
MATH 1902: Mathematics for the Physical Sciences I
 MATH 1902: Mathematics for the Physical Sciences I Dr Dana Mackey School of Mathematical Sciences Room A305 A Email: Dana.Mackey@dit.ie Dana Mackey (DIT) MATH 1902 1 / 46 Module content/assessment Functions
MATH 1902: Mathematics for the Physical Sciences I Dr Dana Mackey School of Mathematical Sciences Room A305 A Email: Dana.Mackey@dit.ie Dana Mackey (DIT) MATH 1902 1 / 46 Module content/assessment Functions
MAS331: Metric Spaces Problems on Chapter 1
 MAS331: Metric Spaces Problems on Chapter 1 1. In R 3, find d 1 ((3, 1, 4), (2, 7, 1)), d 2 ((3, 1, 4), (2, 7, 1)) and d ((3, 1, 4), (2, 7, 1)). 2. In R 4, show that d 1 ((4, 4, 4, 6), (0, 0, 0, 0)) =
MAS331: Metric Spaces Problems on Chapter 1 1. In R 3, find d 1 ((3, 1, 4), (2, 7, 1)), d 2 ((3, 1, 4), (2, 7, 1)) and d ((3, 1, 4), (2, 7, 1)). 2. In R 4, show that d 1 ((4, 4, 4, 6), (0, 0, 0, 0)) =
Functions. Remark 1.2 The objective of our course Calculus is to study functions.
 Functions 1.1 Functions and their Graphs Definition 1.1 A function f is a rule assigning a number to each of the numbers. The number assigned to the number x via the rule f is usually denoted by f(x).
Functions 1.1 Functions and their Graphs Definition 1.1 A function f is a rule assigning a number to each of the numbers. The number assigned to the number x via the rule f is usually denoted by f(x).
MATH Max-min Theory Fall 2016
 MATH 20550 Max-min Theory Fall 2016 1. Definitions and main theorems Max-min theory starts with a function f of a vector variable x and a subset D of the domain of f. So far when we have worked with functions
MATH 20550 Max-min Theory Fall 2016 1. Definitions and main theorems Max-min theory starts with a function f of a vector variable x and a subset D of the domain of f. So far when we have worked with functions
Notes on uniform convergence
 Notes on uniform convergence Erik Wahlén erik.wahlen@math.lu.se January 17, 2012 1 Numerical sequences We begin by recalling some properties of numerical sequences. By a numerical sequence we simply mean
Notes on uniform convergence Erik Wahlén erik.wahlen@math.lu.se January 17, 2012 1 Numerical sequences We begin by recalling some properties of numerical sequences. By a numerical sequence we simply mean
REVIEW OF ESSENTIAL MATH 346 TOPICS
 REVIEW OF ESSENTIAL MATH 346 TOPICS 1. AXIOMATIC STRUCTURE OF R Doğan Çömez The real number system is a complete ordered field, i.e., it is a set R which is endowed with addition and multiplication operations
REVIEW OF ESSENTIAL MATH 346 TOPICS 1. AXIOMATIC STRUCTURE OF R Doğan Çömez The real number system is a complete ordered field, i.e., it is a set R which is endowed with addition and multiplication operations
MATH 23b, SPRING 2005 THEORETICAL LINEAR ALGEBRA AND MULTIVARIABLE CALCULUS Midterm (part 1) Solutions March 21, 2005
 Solutions March 21, 2005") MATH 23b, SPRING 2005 THEORETICAL LINEAR ALGEBRA AND MULTIVARIABLE CALCULUS Midterm (part 1) Solutions March 21, 2005 1. True or False (22 points, 2 each) T or F Every set in R n is either open or closed
MATH 23b, SPRING 2005 THEORETICAL LINEAR ALGEBRA AND MULTIVARIABLE CALCULUS Midterm (part 1) Solutions March 21, 2005 1. True or False (22 points, 2 each) T or F Every set in R n is either open or closed
Chapter 8. P-adic numbers. 8.1 Absolute values
 Chapter 8 P-adic numbers Literature: N. Koblitz, p-adic Numbers, p-adic Analysis, and Zeta-Functions, 2nd edition, Graduate Texts in Mathematics 58, Springer Verlag 1984, corrected 2nd printing 1996, Chap.
Chapter 8 P-adic numbers Literature: N. Koblitz, p-adic Numbers, p-adic Analysis, and Zeta-Functions, 2nd edition, Graduate Texts in Mathematics 58, Springer Verlag 1984, corrected 2nd printing 1996, Chap.
CHAPTER 7. Connectedness
 CHAPTER 7 Connectedness 7.1. Connected topological spaces Definition 7.1. A topological space (X, T X ) is said to be connected if there is no continuous surjection f : X {0, 1} where the two point set
CHAPTER 7 Connectedness 7.1. Connected topological spaces Definition 7.1. A topological space (X, T X ) is said to be connected if there is no continuous surjection f : X {0, 1} where the two point set
QF101: Quantitative Finance August 22, Week 1: Functions. Facilitator: Christopher Ting AY 2017/2018
 QF101: Quantitative Finance August 22, 2017 Week 1: Functions Facilitator: Christopher Ting AY 2017/2018 The chief function of the body is to carry the brain around. Thomas A. Edison 1.1 What is a function?
QF101: Quantitative Finance August 22, 2017 Week 1: Functions Facilitator: Christopher Ting AY 2017/2018 The chief function of the body is to carry the brain around. Thomas A. Edison 1.1 What is a function?
Metric Spaces and Topology
 Chapter 2 Metric Spaces and Topology From an engineering perspective, the most important way to construct a topology on a set is to define the topology in terms of a metric on the set. This approach underlies
Chapter 2 Metric Spaces and Topology From an engineering perspective, the most important way to construct a topology on a set is to define the topology in terms of a metric on the set. This approach underlies
Chapter 2: Unconstrained Extrema
 Chapter 2: Unconstrained Extrema Math 368 c Copyright 2012, 2013 R Clark Robinson May 22, 2013 Chapter 2: Unconstrained Extrema 1 Types of Sets Definition For p R n and r > 0, the open ball about p of
Chapter 2: Unconstrained Extrema Math 368 c Copyright 2012, 2013 R Clark Robinson May 22, 2013 Chapter 2: Unconstrained Extrema 1 Types of Sets Definition For p R n and r > 0, the open ball about p of
Vector Functions & Space Curves MATH 2110Q
 Vector Functions & Space Curves Vector Functions & Space Curves Vector Functions Definition A vector function or vector-valued function is a function that takes real numbers as inputs and gives vectors
Vector Functions & Space Curves Vector Functions & Space Curves Vector Functions Definition A vector function or vector-valued function is a function that takes real numbers as inputs and gives vectors
Math 5210, Definitions and Theorems on Metric Spaces
 Math 5210, Definitions and Theorems on Metric Spaces Let (X, d) be a metric space. We will use the following definitions (see Rudin, chap 2, particularly 2.18) 1. Let p X and r R, r > 0, The ball of radius
Math 5210, Definitions and Theorems on Metric Spaces Let (X, d) be a metric space. We will use the following definitions (see Rudin, chap 2, particularly 2.18) 1. Let p X and r R, r > 0, The ball of radius
Real Analysis Math 131AH Rudin, Chapter #1. Dominique Abdi
 Real Analysis Math 3AH Rudin, Chapter # Dominique Abdi.. If r is rational (r 0) and x is irrational, prove that r + x and rx are irrational. Solution. Assume the contrary, that r+x and rx are rational.
Real Analysis Math 3AH Rudin, Chapter # Dominique Abdi.. If r is rational (r 0) and x is irrational, prove that r + x and rx are irrational. Solution. Assume the contrary, that r+x and rx are rational.
Set, functions and Euclidean space. Seungjin Han
 Set, functions and Euclidean space Seungjin Han September, 2018 1 Some Basics LOGIC A is necessary for B : If B holds, then A holds. B A A B is the contraposition of B A. A is sufficient for B: If A holds,
Set, functions and Euclidean space Seungjin Han September, 2018 1 Some Basics LOGIC A is necessary for B : If B holds, then A holds. B A A B is the contraposition of B A. A is sufficient for B: If A holds,
Real Analysis. Joe Patten August 12, 2018
 Real Analysis Joe Patten August 12, 2018 1 Relations and Functions 1.1 Relations A (binary) relation, R, from set A to set B is a subset of A B. Since R is a subset of A B, it is a set of ordered pairs.
Real Analysis Joe Patten August 12, 2018 1 Relations and Functions 1.1 Relations A (binary) relation, R, from set A to set B is a subset of A B. Since R is a subset of A B, it is a set of ordered pairs.
2 (Bonus). Let A X consist of points (x, y) such that either x or y is a rational number. Is A measurable? What is its Lebesgue measure?
. Let A X consist of points (x, y) such that either x or y is a rational number. Is A measurable? What is its Lebesgue measure?") MA 645-4A (Real Analysis), Dr. Chernov Homework assignment 1 (Due 9/5). Prove that every countable set A is measurable and µ(a) = 0. 2 (Bonus). Let A consist of points (x, y) such that either x or y is
MA 645-4A (Real Analysis), Dr. Chernov Homework assignment 1 (Due 9/5). Prove that every countable set A is measurable and µ(a) = 0. 2 (Bonus). Let A consist of points (x, y) such that either x or y is
Sample Problems for the Second Midterm Exam
 Math 3220 1. Treibergs σιι Sample Problems for the Second Midterm Exam Name: Problems With Solutions September 28. 2007 Questions 1 10 appeared in my Fall 2000 and Fall 2001 Math 3220 exams. (1) Let E
Math 3220 1. Treibergs σιι Sample Problems for the Second Midterm Exam Name: Problems With Solutions September 28. 2007 Questions 1 10 appeared in my Fall 2000 and Fall 2001 Math 3220 exams. (1) Let E
MATH2111 Higher Several Variable Calculus Week 2
 MATH2111 Higher Several Variable Calculus Week 2 Dr Denis Potapov School of Mathematics and Statistics University of New South Wales Semester 1, 2016 [updated: March 8, 2016] D Potapov (UNSW Maths & Stats)
MATH2111 Higher Several Variable Calculus Week 2 Dr Denis Potapov School of Mathematics and Statistics University of New South Wales Semester 1, 2016 [updated: March 8, 2016] D Potapov (UNSW Maths & Stats)
Analysis Finite and Infinite Sets The Real Numbers The Cantor Set
 Analysis Finite and Infinite Sets Definition. An initial segment is {n N n n 0 }. Definition. A finite set can be put into one-to-one correspondence with an initial segment. The empty set is also considered
Analysis Finite and Infinite Sets Definition. An initial segment is {n N n n 0 }. Definition. A finite set can be put into one-to-one correspondence with an initial segment. The empty set is also considered
2. Metric Spaces. 2.1 Definitions etc.
 2. Metric Spaces 2.1 Definitions etc. The procedure in Section for regarding R as a topological space may be generalized to many other sets in which there is some kind of distance (formally, sets with
2. Metric Spaces 2.1 Definitions etc. The procedure in Section for regarding R as a topological space may be generalized to many other sets in which there is some kind of distance (formally, sets with
3 FUNCTIONS. 3.1 Definition and Basic Properties. c Dr Oksana Shatalov, Fall
 c Dr Oksana Shatalov, Fall 2016 1 3 FUNCTIONS 3.1 Definition and Basic Properties DEFINITION 1. Let A and B be nonempty sets. A function f from the set A to the set B is a correspondence that assigns to
c Dr Oksana Shatalov, Fall 2016 1 3 FUNCTIONS 3.1 Definition and Basic Properties DEFINITION 1. Let A and B be nonempty sets. A function f from the set A to the set B is a correspondence that assigns to
MAT 570 REAL ANALYSIS LECTURE NOTES. Contents. 1. Sets Functions Countability Axiom of choice Equivalence relations 9
 MAT 570 REAL ANALYSIS LECTURE NOTES PROFESSOR: JOHN QUIGG SEMESTER: FALL 204 Contents. Sets 2 2. Functions 5 3. Countability 7 4. Axiom of choice 8 5. Equivalence relations 9 6. Real numbers 9 7. Extended
MAT 570 REAL ANALYSIS LECTURE NOTES PROFESSOR: JOHN QUIGG SEMESTER: FALL 204 Contents. Sets 2 2. Functions 5 3. Countability 7 4. Axiom of choice 8 5. Equivalence relations 9 6. Real numbers 9 7. Extended
Topological properties
 CHAPTER 4 Topological properties 1. Connectedness Definitions and examples Basic properties Connected components Connected versus path connected, again 2. Compactness Definition and first examples Topological
CHAPTER 4 Topological properties 1. Connectedness Definitions and examples Basic properties Connected components Connected versus path connected, again 2. Compactness Definition and first examples Topological
3 FUNCTIONS. 3.1 Definition and Basic Properties. c Dr Oksana Shatalov, Fall
 c Dr Oksana Shatalov, Fall 2014 1 3 FUNCTIONS 3.1 Definition and Basic Properties DEFINITION 1. Let A and B be nonempty sets. A function f from A to B is a rule that assigns to each element in the set
c Dr Oksana Shatalov, Fall 2014 1 3 FUNCTIONS 3.1 Definition and Basic Properties DEFINITION 1. Let A and B be nonempty sets. A function f from A to B is a rule that assigns to each element in the set
Introduction to Functional Analysis
 Introduction to Functional Analysis Carnegie Mellon University, 21-640, Spring 2014 Acknowledgements These notes are based on the lecture course given by Irene Fonseca but may differ from the exact lecture
Introduction to Functional Analysis Carnegie Mellon University, 21-640, Spring 2014 Acknowledgements These notes are based on the lecture course given by Irene Fonseca but may differ from the exact lecture
M311 Functions of Several Variables. CHAPTER 1. Continuity CHAPTER 2. The Bolzano Weierstrass Theorem and Compact Sets CHAPTER 3.
 M311 Functions of Several Variables 2006 CHAPTER 1. Continuity CHAPTER 2. The Bolzano Weierstrass Theorem and Compact Sets CHAPTER 3. Differentiability 1 2 CHAPTER 1. Continuity If (a, b) R 2 then we write
M311 Functions of Several Variables 2006 CHAPTER 1. Continuity CHAPTER 2. The Bolzano Weierstrass Theorem and Compact Sets CHAPTER 3. Differentiability 1 2 CHAPTER 1. Continuity If (a, b) R 2 then we write
Economics 204 Summer/Fall 2017 Lecture 7 Tuesday July 25, 2017
 Economics 204 Summer/Fall 2017 Lecture 7 Tuesday July 25, 2017 Section 2.9. Connected Sets Definition 1 Two sets A, B in a metric space are separated if Ā B = A B = A set in a metric space is connected
Economics 204 Summer/Fall 2017 Lecture 7 Tuesday July 25, 2017 Section 2.9. Connected Sets Definition 1 Two sets A, B in a metric space are separated if Ā B = A B = A set in a metric space is connected
NOTES ON MULTIVARIABLE CALCULUS: DIFFERENTIAL CALCULUS
 NOTES ON MULTIVARIABLE CALCULUS: DIFFERENTIAL CALCULUS SAMEER CHAVAN Abstract. This is the first part of Notes on Multivariable Calculus based on the classical texts [6] and [5]. We present here the geometric
NOTES ON MULTIVARIABLE CALCULUS: DIFFERENTIAL CALCULUS SAMEER CHAVAN Abstract. This is the first part of Notes on Multivariable Calculus based on the classical texts [6] and [5]. We present here the geometric
AP Calculus Chapter 3 Testbank (Mr. Surowski)
") AP Calculus Chapter 3 Testbank (Mr. Surowski) Part I. Multiple-Choice Questions (5 points each; please circle the correct answer.). If f(x) = 0x 4 3 + x, then f (8) = (A) (B) 4 3 (C) 83 3 (D) 2 3 (E) 2
AP Calculus Chapter 3 Testbank (Mr. Surowski) Part I. Multiple-Choice Questions (5 points each; please circle the correct answer.). If f(x) = 0x 4 3 + x, then f (8) = (A) (B) 4 3 (C) 83 3 (D) 2 3 (E) 2
MATH1013 Calculus I. Revision 1
 MATH1013 Calculus I Revision 1 Edmund Y. M. Chiang Department of Mathematics Hong Kong University of Science & Technology November 27, 2014 2013 1 Based on Briggs, Cochran and Gillett: Calculus for Scientists
MATH1013 Calculus I Revision 1 Edmund Y. M. Chiang Department of Mathematics Hong Kong University of Science & Technology November 27, 2014 2013 1 Based on Briggs, Cochran and Gillett: Calculus for Scientists
Examples of Dual Spaces from Measure Theory
 Chapter 9 Examples of Dual Spaces from Measure Theory We have seen that L (, A, µ) is a Banach space for any measure space (, A, µ). We will extend that concept in the following section to identify an
Chapter 9 Examples of Dual Spaces from Measure Theory We have seen that L (, A, µ) is a Banach space for any measure space (, A, µ). We will extend that concept in the following section to identify an
Solutions to Tutorial 7 (Week 8)
") The University of Sydney School of Mathematics and Statistics Solutions to Tutorial 7 (Week 8) MATH2962: Real and Complex Analysis (Advanced) Semester 1, 2017 Web Page: http://www.maths.usyd.edu.au/u/ug/im/math2962/
The University of Sydney School of Mathematics and Statistics Solutions to Tutorial 7 (Week 8) MATH2962: Real and Complex Analysis (Advanced) Semester 1, 2017 Web Page: http://www.maths.usyd.edu.au/u/ug/im/math2962/
Prague, II.2. Integrability (existence of the Riemann integral) sufficient conditions... 37
 sufficient conditions... 37") Mathematics II Prague, 1998 ontents Introduction.................................................................... 3 I. Functions of Several Real Variables (Stanislav Kračmar) II. I.1. Euclidean space
Mathematics II Prague, 1998 ontents Introduction.................................................................... 3 I. Functions of Several Real Variables (Stanislav Kračmar) II. I.1. Euclidean space
Exercises from other sources REAL NUMBERS 2,...,
 Exercises from other sources REAL NUMBERS 1. Find the supremum and infimum of the following sets: a) {1, b) c) 12, 13, 14, }, { 1 3, 4 9, 13 27, 40 } 81,, { 2, 2 + 2, 2 + 2 + } 2,..., d) {n N : n 2 < 10},
Exercises from other sources REAL NUMBERS 1. Find the supremum and infimum of the following sets: a) {1, b) c) 12, 13, 14, }, { 1 3, 4 9, 13 27, 40 } 81,, { 2, 2 + 2, 2 + 2 + } 2,..., d) {n N : n 2 < 10},
Math 421, Homework #9 Solutions
 Math 41, Homework #9 Solutions (1) (a) A set E R n is said to be path connected if for any pair of points x E and y E there exists a continuous function γ : [0, 1] R n satisfying γ(0) = x, γ(1) = y, and
Math 41, Homework #9 Solutions (1) (a) A set E R n is said to be path connected if for any pair of points x E and y E there exists a continuous function γ : [0, 1] R n satisfying γ(0) = x, γ(1) = y, and
Vector Calculus. Lecture Notes
 Vector Calculus Lecture Notes Adolfo J. Rumbos c Draft date November 23, 211 2 Contents 1 Motivation for the course 5 2 Euclidean Space 7 2.1 Definition of n Dimensional Euclidean Space........... 7 2.2
Vector Calculus Lecture Notes Adolfo J. Rumbos c Draft date November 23, 211 2 Contents 1 Motivation for the course 5 2 Euclidean Space 7 2.1 Definition of n Dimensional Euclidean Space........... 7 2.2
Homework for Math , Spring 2013
 Homework for Math 3220 2, Spring 2013 A. Treibergs, Instructor April 10, 2013 Our text is by Joseph L. Taylor, Foundations of Analysis, American Mathematical Society, Pure and Applied Undergraduate Texts
Homework for Math 3220 2, Spring 2013 A. Treibergs, Instructor April 10, 2013 Our text is by Joseph L. Taylor, Foundations of Analysis, American Mathematical Society, Pure and Applied Undergraduate Texts
B553 Lecture 3: Multivariate Calculus and Linear Algebra Review
 B553 Lecture 3: Multivariate Calculus and Linear Algebra Review Kris Hauser December 30, 2011 We now move from the univariate setting to the multivariate setting, where we will spend the rest of the class.
B553 Lecture 3: Multivariate Calculus and Linear Algebra Review Kris Hauser December 30, 2011 We now move from the univariate setting to the multivariate setting, where we will spend the rest of the class.
Exercises for Multivariable Differential Calculus XM521
 This document lists all the exercises for XM521. The Type I (True/False) exercises will be given, and should be answered, online immediately following each lecture. The Type III exercises are to be done
This document lists all the exercises for XM521. The Type I (True/False) exercises will be given, and should be answered, online immediately following each lecture. The Type III exercises are to be done
Tangent spaces, normals and extrema
 Chapter 3 Tangent spaces, normals and extrema If S is a surface in 3-space, with a point a S where S looks smooth, i.e., without any fold or cusp or self-crossing, we can intuitively define the tangent
Chapter 3 Tangent spaces, normals and extrema If S is a surface in 3-space, with a point a S where S looks smooth, i.e., without any fold or cusp or self-crossing, we can intuitively define the tangent
2. Theory of the Derivative
 2. Theory of the Derivative 2.1 Tangent Lines 2.2 Definition of Derivative 2.3 Rates of Change 2.4 Derivative Rules 2.5 Higher Order Derivatives 2.6 Implicit Differentiation 2.7 L Hôpital s Rule 2.8 Some
2. Theory of the Derivative 2.1 Tangent Lines 2.2 Definition of Derivative 2.3 Rates of Change 2.4 Derivative Rules 2.5 Higher Order Derivatives 2.6 Implicit Differentiation 2.7 L Hôpital s Rule 2.8 Some
Chapter 2. Metric Spaces. 2.1 Metric Spaces
 Chapter 2 Metric Spaces ddddddddddddddddddddddddd ddddddd dd ddd A metric space is a mathematical object in which the distance between two points is meaningful. Metric spaces constitute an important class
Chapter 2 Metric Spaces ddddddddddddddddddddddddd ddddddd dd ddd A metric space is a mathematical object in which the distance between two points is meaningful. Metric spaces constitute an important class
Advanced Calculus Notes. Michael P. Windham
 Advanced Calculus Notes Michael P. Windham February 25, 2008 Contents 1 Basics 5 1.1 Euclidean Space R n............................ 5 1.2 Functions................................. 7 1.2.1 Sets and functions........................
Advanced Calculus Notes Michael P. Windham February 25, 2008 Contents 1 Basics 5 1.1 Euclidean Space R n............................ 5 1.2 Functions................................. 7 1.2.1 Sets and functions........................
Most Continuous Functions are Nowhere Differentiable
 Most Continuous Functions are Nowhere Differentiable Spring 2004 The Space of Continuous Functions Let K = [0, 1] and let C(K) be the set of all continuous functions f : K R. Definition 1 For f C(K) we
Most Continuous Functions are Nowhere Differentiable Spring 2004 The Space of Continuous Functions Let K = [0, 1] and let C(K) be the set of all continuous functions f : K R. Definition 1 For f C(K) we
From now on, we will represent a metric space with (X, d). Here are some examples: i=1 (x i y i ) p ) 1 p, p 1.
. Here are some examples: i=1 (x i y i ) p ) 1 p, p 1.") Chapter 1 Metric spaces 1.1 Metric and convergence We will begin with some basic concepts. Definition 1.1. (Metric space) Metric space is a set X, with a metric satisfying: 1. d(x, y) 0, d(x, y) = 0 x
Chapter 1 Metric spaces 1.1 Metric and convergence We will begin with some basic concepts. Definition 1.1. (Metric space) Metric space is a set X, with a metric satisfying: 1. d(x, y) 0, d(x, y) = 0 x
Chapter 2: Functions, Limits and Continuity
 Chapter 2: Functions, Limits and Continuity Functions Limits Continuity Chapter 2: Functions, Limits and Continuity 1 Functions Functions are the major tools for describing the real world in mathematical
Chapter 2: Functions, Limits and Continuity Functions Limits Continuity Chapter 2: Functions, Limits and Continuity 1 Functions Functions are the major tools for describing the real world in mathematical
1.2 Functions What is a Function? 1.2. FUNCTIONS 11
 1.2. FUNCTIONS 11 1.2 Functions 1.2.1 What is a Function? In this section, we only consider functions of one variable. Loosely speaking, a function is a special relation which exists between two variables.
1.2. FUNCTIONS 11 1.2 Functions 1.2.1 What is a Function? In this section, we only consider functions of one variable. Loosely speaking, a function is a special relation which exists between two variables.
Section 21. The Metric Topology (Continued)
") 21. The Metric Topology (cont.) 1 Section 21. The Metric Topology (Continued) Note. In this section we give a number of results for metric spaces which are familar from calculus and real analysis. We also
21. The Metric Topology (cont.) 1 Section 21. The Metric Topology (Continued) Note. In this section we give a number of results for metric spaces which are familar from calculus and real analysis. We also
Structural and Multidisciplinary Optimization. P. Duysinx and P. Tossings
 Structural and Multidisciplinary Optimization P. Duysinx and P. Tossings 2018-2019 CONTACTS Pierre Duysinx Institut de Mécanique et du Génie Civil (B52/3) Phone number: 04/366.91.94 Email: P.Duysinx@uliege.be
Structural and Multidisciplinary Optimization P. Duysinx and P. Tossings 2018-2019 CONTACTS Pierre Duysinx Institut de Mécanique et du Génie Civil (B52/3) Phone number: 04/366.91.94 Email: P.Duysinx@uliege.be
AP Calculus Summer Prep
 AP Calculus Summer Prep Topics from Algebra and Pre-Calculus (Solutions are on the Answer Key on the Last Pages) The purpose of this packet is to give you a review of basic skills. You are asked to have
AP Calculus Summer Prep Topics from Algebra and Pre-Calculus (Solutions are on the Answer Key on the Last Pages) The purpose of this packet is to give you a review of basic skills. You are asked to have
MATH 51H Section 4. October 16, Recall what it means for a function between metric spaces to be continuous:
 MATH 51H Section 4 October 16, 2015 1 Continuity Recall what it means for a function between metric spaces to be continuous: Definition. Let (X, d X ), (Y, d Y ) be metric spaces. A function f : X Y is
MATH 51H Section 4 October 16, 2015 1 Continuity Recall what it means for a function between metric spaces to be continuous: Definition. Let (X, d X ), (Y, d Y ) be metric spaces. A function f : X Y is
3 (Due ). Let A X consist of points (x, y) such that either x or y is a rational number. Is A measurable? What is its Lebesgue measure?
. Let A X consist of points (x, y) such that either x or y is a rational number. Is A measurable? What is its Lebesgue measure?") MA 645-4A (Real Analysis), Dr. Chernov Homework assignment 1 (Due ). Show that the open disk x 2 + y 2 < 1 is a countable union of planar elementary sets. Show that the closed disk x 2 + y 2 1 is a countable
MA 645-4A (Real Analysis), Dr. Chernov Homework assignment 1 (Due ). Show that the open disk x 2 + y 2 < 1 is a countable union of planar elementary sets. Show that the closed disk x 2 + y 2 1 is a countable
3 FUNCTIONS. 3.1 Definition and Basic Properties. c Dr Oksana Shatalov, Spring
 c Dr Oksana Shatalov, Spring 2016 1 3 FUNCTIONS 3.1 Definition and Basic Properties DEFINITION 1. Let A and B be nonempty sets. A function f from A to B is a rule that assigns to each element in the set
c Dr Oksana Shatalov, Spring 2016 1 3 FUNCTIONS 3.1 Definition and Basic Properties DEFINITION 1. Let A and B be nonempty sets. A function f from A to B is a rule that assigns to each element in the set
FRACTAL GEOMETRY, DYNAMICAL SYSTEMS AND CHAOS
 FRACTAL GEOMETRY, DYNAMICAL SYSTEMS AND CHAOS MIDTERM SOLUTIONS. Let f : R R be the map on the line generated by the function f(x) = x 3. Find all the fixed points of f and determine the type of their
FRACTAL GEOMETRY, DYNAMICAL SYSTEMS AND CHAOS MIDTERM SOLUTIONS. Let f : R R be the map on the line generated by the function f(x) = x 3. Find all the fixed points of f and determine the type of their
APPLICATIONS OF DIFFERENTIABILITY IN R n.
 APPLICATIONS OF DIFFERENTIABILITY IN R n. MATANIA BEN-ARTZI April 2015 Functions here are defined on a subset T R n and take values in R m, where m can be smaller, equal or greater than n. The (open) ball
APPLICATIONS OF DIFFERENTIABILITY IN R n. MATANIA BEN-ARTZI April 2015 Functions here are defined on a subset T R n and take values in R m, where m can be smaller, equal or greater than n. The (open) ball
(x x 0 ) 2 + (y y 0 ) 2 = ε 2, (2.11)
 2 + (y y 0 ) 2 = ε 2, (2.11)") 2.2 Limits and continuity In order to introduce the concepts of limit and continuity for functions of more than one variable we need first to generalise the concept of neighbourhood of a point from R to
2.2 Limits and continuity In order to introduce the concepts of limit and continuity for functions of more than one variable we need first to generalise the concept of neighbourhood of a point from R to
P-adic Functions - Part 1
 P-adic Functions - Part 1 Nicolae Ciocan 22.11.2011 1 Locally constant functions Motivation: Another big difference between p-adic analysis and real analysis is the existence of nontrivial locally constant
P-adic Functions - Part 1 Nicolae Ciocan 22.11.2011 1 Locally constant functions Motivation: Another big difference between p-adic analysis and real analysis is the existence of nontrivial locally constant
NOTES ON DIOPHANTINE APPROXIMATION
 NOTES ON DIOPHANTINE APPROXIMATION Jan-Hendrik Evertse January 29, 200 9 p-adic Numbers Literature: N. Koblitz, p-adic Numbers, p-adic Analysis, and Zeta-Functions, 2nd edition, Graduate Texts in Mathematics
NOTES ON DIOPHANTINE APPROXIMATION Jan-Hendrik Evertse January 29, 200 9 p-adic Numbers Literature: N. Koblitz, p-adic Numbers, p-adic Analysis, and Zeta-Functions, 2nd edition, Graduate Texts in Mathematics
Math 541 Fall 2008 Connectivity Transition from Math 453/503 to Math 541 Ross E. Staffeldt-August 2008
 Math 541 Fall 2008 Connectivity Transition from Math 453/503 to Math 541 Ross E. Staffeldt-August 2008 Closed sets We have been operating at a fundamental level at which a topological space is a set together
Math 541 Fall 2008 Connectivity Transition from Math 453/503 to Math 541 Ross E. Staffeldt-August 2008 Closed sets We have been operating at a fundamental level at which a topological space is a set together
HOMEWORK ASSIGNMENT 6
 HOMEWORK ASSIGNMENT 6 DUE 15 MARCH, 2016 1) Suppose f, g : A R are uniformly continuous on A. Show that f + g is uniformly continuous on A. Solution First we note: In order to show that f + g is uniformly
HOMEWORK ASSIGNMENT 6 DUE 15 MARCH, 2016 1) Suppose f, g : A R are uniformly continuous on A. Show that f + g is uniformly continuous on A. Solution First we note: In order to show that f + g is uniformly
1 Holomorphic functions
 Robert Oeckl CA NOTES 1 15/09/2009 1 1 Holomorphic functions 11 The complex derivative The basic objects of complex analysis are the holomorphic functions These are functions that posses a complex derivative
Robert Oeckl CA NOTES 1 15/09/2009 1 1 Holomorphic functions 11 The complex derivative The basic objects of complex analysis are the holomorphic functions These are functions that posses a complex derivative
Defining a function: f[x,y ]:= x 2 +y 2. Take care with the elements in red since they are different from the standard mathematical notation.
![Defining a function: f[x,y ]:= x 2 +y 2. Take care with the elements in red since they are different from the standard mathematical notation.](/thumbs/94/121860687.jpg "Defining a function: f[x,y ]:= x 2 +y 2. Take care with the elements in red since they are different from the standard mathematical notation.") Chapter 1 Functions Exercises 1,, 3, 4, 5, 6 Mathematica useful commands Defining a function: f[x,y ]:= x +y Take care with the elements in red since they are different from the standard mathematical notation
Chapter 1 Functions Exercises 1,, 3, 4, 5, 6 Mathematica useful commands Defining a function: f[x,y ]:= x +y Take care with the elements in red since they are different from the standard mathematical notation
x x 1 x 2 + x 2 1 > 0. HW5. Text defines:
 Lecture 15: Last time: MVT. Special case: Rolle s Theorem (when f(a) = f(b)). Recall: Defn: Let f be defined on an interval I. f is increasing (or strictly increasing) if whenever x 1, x 2 I and x 2 >
Lecture 15: Last time: MVT. Special case: Rolle s Theorem (when f(a) = f(b)). Recall: Defn: Let f be defined on an interval I. f is increasing (or strictly increasing) if whenever x 1, x 2 I and x 2 >
Foundations of Mathematics MATH 220 FALL 2017 Lecture Notes
 Foundations of Mathematics MATH 220 FALL 2017 Lecture Notes These notes form a brief summary of what has been covered during the lectures. All the definitions must be memorized and understood. Statements
Foundations of Mathematics MATH 220 FALL 2017 Lecture Notes These notes form a brief summary of what has been covered during the lectures. All the definitions must be memorized and understood. Statements
Some Background Material
 Chapter 1 Some Background Material In the first chapter, we present a quick review of elementary - but important - material as a way of dipping our toes in the water. This chapter also introduces important
Chapter 1 Some Background Material In the first chapter, we present a quick review of elementary - but important - material as a way of dipping our toes in the water. This chapter also introduces important
Calculus & Analytic Geometry I
 TQS 124 Autumn 2008 Quinn Calculus & Analytic Geometry I The Derivative: Analytic Viewpoint Derivative of a Constant Function. For c a constant, the derivative of f(x) = c equals f (x) = Derivative of
TQS 124 Autumn 2008 Quinn Calculus & Analytic Geometry I The Derivative: Analytic Viewpoint Derivative of a Constant Function. For c a constant, the derivative of f(x) = c equals f (x) = Derivative of
Math 115 Section 018 Course Note
 Course Note 1 General Functions Definition 1.1. A function is a rule that takes certain numbers as inputs an assigns to each a efinite output number. The set of all input numbers is calle the omain of
Course Note 1 General Functions Definition 1.1. A function is a rule that takes certain numbers as inputs an assigns to each a efinite output number. The set of all input numbers is calle the omain of
PLC Papers Created For:
 PLC Papers Created For: Josh Angles and linear graphs Graphs of Linear Functions 1 Grade 4 Objective: Recognise, sketch and interpret graphs of linear functions. Question 1 Sketch the graph of each function,
PLC Papers Created For: Josh Angles and linear graphs Graphs of Linear Functions 1 Grade 4 Objective: Recognise, sketch and interpret graphs of linear functions. Question 1 Sketch the graph of each function,
Chapter 3a Topics in differentiation. Problems in differentiation. Problems in differentiation. LC Abueg: mathematical economics
 Chapter 3a Topics in differentiation Lectures in Mathematical Economics L Cagandahan Abueg De La Salle University School of Economics Problems in differentiation Problems in differentiation Problem 1.
Chapter 3a Topics in differentiation Lectures in Mathematical Economics L Cagandahan Abueg De La Salle University School of Economics Problems in differentiation Problems in differentiation Problem 1.
THEOREMS, ETC., FOR MATH 515
 THEOREMS, ETC., FOR MATH 515 Proposition 1 (=comment on page 17). If A is an algebra, then any finite union or finite intersection of sets in A is also in A. Proposition 2 (=Proposition 1.1). For every
THEOREMS, ETC., FOR MATH 515 Proposition 1 (=comment on page 17). If A is an algebra, then any finite union or finite intersection of sets in A is also in A. Proposition 2 (=Proposition 1.1). For every
Calculus - II Multivariable Calculus. M.Thamban Nair. Department of Mathematics Indian Institute of Technology Madras
 Calculus - II Multivariable Calculus M.Thamban Nair epartment of Mathematics Indian Institute of Technology Madras February 27 Revised: January 29 Contents Preface v 1 Functions of everal Variables 1 1.1
Calculus - II Multivariable Calculus M.Thamban Nair epartment of Mathematics Indian Institute of Technology Madras February 27 Revised: January 29 Contents Preface v 1 Functions of everal Variables 1 1.1
ECM Calculus and Geometry. Revision Notes
 ECM1702 - Calculus and Geometry Revision Notes Joshua Byrne Autumn 2011 Contents 1 The Real Numbers 1 1.1 Notation.................................................. 1 1.2 Set Notation...............................................
ECM1702 - Calculus and Geometry Revision Notes Joshua Byrne Autumn 2011 Contents 1 The Real Numbers 1 1.1 Notation.................................................. 1 1.2 Set Notation...............................................
CHAPTER 2: CONVEX SETS AND CONCAVE FUNCTIONS. W. Erwin Diewert January 31, 2008.
 1 ECONOMICS 594: LECTURE NOTES CHAPTER 2: CONVEX SETS AND CONCAVE FUNCTIONS W. Erwin Diewert January 31, 2008. 1. Introduction Many economic problems have the following structure: (i) a linear function
1 ECONOMICS 594: LECTURE NOTES CHAPTER 2: CONVEX SETS AND CONCAVE FUNCTIONS W. Erwin Diewert January 31, 2008. 1. Introduction Many economic problems have the following structure: (i) a linear function
Introduction to Real Analysis
 Introduction to Real Analysis Joshua Wilde, revised by Isabel Tecu, Takeshi Suzuki and María José Boccardi August 13, 2013 1 Sets Sets are the basic objects of mathematics. In fact, they are so basic that
Introduction to Real Analysis Joshua Wilde, revised by Isabel Tecu, Takeshi Suzuki and María José Boccardi August 13, 2013 1 Sets Sets are the basic objects of mathematics. In fact, they are so basic that
MATH 131A: REAL ANALYSIS (BIG IDEAS)
") MATH 131A: REAL ANALYSIS (BIG IDEAS) Theorem 1 (The Triangle Inequality). For all x, y R we have x + y x + y. Proposition 2 (The Archimedean property). For each x R there exists an n N such that n > x.
MATH 131A: REAL ANALYSIS (BIG IDEAS) Theorem 1 (The Triangle Inequality). For all x, y R we have x + y x + y. Proposition 2 (The Archimedean property). For each x R there exists an n N such that n > x.
Chapter 13. Convex and Concave. Josef Leydold Mathematical Methods WS 2018/19 13 Convex and Concave 1 / 44
 Chapter 13 Convex and Concave Josef Leydold Mathematical Methods WS 2018/19 13 Convex and Concave 1 / 44 Monotone Function Function f is called monotonically increasing, if x 1 x 2 f (x 1 ) f (x 2 ) It
Chapter 13 Convex and Concave Josef Leydold Mathematical Methods WS 2018/19 13 Convex and Concave 1 / 44 Monotone Function Function f is called monotonically increasing, if x 1 x 2 f (x 1 ) f (x 2 ) It
THE INVERSE FUNCTION THEOREM
 THE INVERSE FUNCTION THEOREM W. PATRICK HOOPER The implicit function theorem is the following result: Theorem 1. Let f be a C 1 function from a neighborhood of a point a R n into R n. Suppose A = Df(a)
THE INVERSE FUNCTION THEOREM W. PATRICK HOOPER The implicit function theorem is the following result: Theorem 1. Let f be a C 1 function from a neighborhood of a point a R n into R n. Suppose A = Df(a)
1. If 1, ω, ω 2, -----, ω 9 are the 10 th roots of unity, then (1 + ω) (1 + ω 2 ) (1 + ω 9 ) is A) 1 B) 1 C) 10 D) 0
 (1 + ω 2 ) (1 + ω 9 ) is A) 1 B) 1 C) 10 D) 0") 4 INUTES. If, ω, ω, -----, ω 9 are the th roots of unity, then ( + ω) ( + ω ) ----- ( + ω 9 ) is B) D) 5. i If - i = a + ib, then a =, b = B) a =, b = a =, b = D) a =, b= 3. Find the integral values for
4 INUTES. If, ω, ω, -----, ω 9 are the th roots of unity, then ( + ω) ( + ω ) ----- ( + ω 9 ) is B) D) 5. i If - i = a + ib, then a =, b = B) a =, b = a =, b = D) a =, b= 3. Find the integral values for
VANDERBILT UNIVERSITY. MATH 2300 MULTIVARIABLE CALCULUS Practice Test 1 Solutions
 VANDERBILT UNIVERSITY MATH 2300 MULTIVARIABLE CALCULUS Practice Test 1 Solutions Directions. This practice test should be used as a study guide, illustrating the concepts that will be emphasized in the
VANDERBILT UNIVERSITY MATH 2300 MULTIVARIABLE CALCULUS Practice Test 1 Solutions Directions. This practice test should be used as a study guide, illustrating the concepts that will be emphasized in the
Review of Multi-Calculus (Study Guide for Spivak s CHAPTER ONE TO THREE)
") Review of Multi-Calculus (Study Guide for Spivak s CHPTER ONE TO THREE) This material is for June 9 to 16 (Monday to Monday) Chapter I: Functions on R n Dot product and norm for vectors in R n : Let X
Review of Multi-Calculus (Study Guide for Spivak s CHPTER ONE TO THREE) This material is for June 9 to 16 (Monday to Monday) Chapter I: Functions on R n Dot product and norm for vectors in R n : Let X
Chapter 2 Differentiation. 2.1 Tangent Lines and Their Slopes. Calculus: A Complete Course, 8e Chapter 2: Differentiation
 Chapter 2 Differentiation 2.1 Tangent Lines and Their Slopes 1) Find the slope of the tangent line to the curve y = 4x x 2 at the point (-1, 0). A) -1 2 C) 6 D) 2 1 E) -2 2) Find the equation of the tangent
Chapter 2 Differentiation 2.1 Tangent Lines and Their Slopes 1) Find the slope of the tangent line to the curve y = 4x x 2 at the point (-1, 0). A) -1 2 C) 6 D) 2 1 E) -2 2) Find the equation of the tangent
DRAFT - Math 101 Lecture Note - Dr. Said Algarni
 3 Differentiation Rules 3.1 The Derivative of Polynomial and Exponential Functions In this section we learn how to differentiate constant functions, power functions, polynomials, and exponential functions.
3 Differentiation Rules 3.1 The Derivative of Polynomial and Exponential Functions In this section we learn how to differentiate constant functions, power functions, polynomials, and exponential functions.
M17 MAT25-21 HOMEWORK 6
 M17 MAT25-21 HOMEWORK 6 DUE 10:00AM WEDNESDAY SEPTEMBER 13TH 1. To Hand In Double Series. The exercises in this section will guide you to complete the proof of the following theorem: Theorem 1: Absolute
M17 MAT25-21 HOMEWORK 6 DUE 10:00AM WEDNESDAY SEPTEMBER 13TH 1. To Hand In Double Series. The exercises in this section will guide you to complete the proof of the following theorem: Theorem 1: Absolute
Notes on Complex Analysis
 Michael Papadimitrakis Notes on Complex Analysis Department of Mathematics University of Crete Contents The complex plane.. The complex plane...................................2 Argument and polar representation.........................
Michael Papadimitrakis Notes on Complex Analysis Department of Mathematics University of Crete Contents The complex plane.. The complex plane...................................2 Argument and polar representation.........................