Periodic and quasi-periodic motions of a solar sail close to in the Earth Sun system
|
|
|
- Meghan Hood
- 5 years ago
- Views:
Transcription
, pp.")


1 Periodic and quasi-periodic motions of a solar sail close to in the Earth Sun system Ariadna Farrés, Àngel Jorba To cite this version: Ariadna Farrés, Àngel Jorba. Periodic and quasi-periodic motions of a solar sail close to in the Earth Sun system. Celestial Mechanics and Dynamical Astronomy, Springer Verlag, 2, 7 (-2), pp <.7/s >. <hal-5525> HAL Id: hal Submitted on 6 Jan 2 HAL is a multi-disciplinary open access archive for the deposit and dissemination of scientific research documents, whether they are published or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers. L archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
2 Celest Mech Dyn Astr (2) 7: DOI.7/s Periodic and quasi-periodic motions of a solar sail close to SL in the Earth Sun system Ariadna Farrés Àngel Jorba Received: November 29 / Revised: 8 February 2 / Accepted: 2 March 2 / Published online: 27 March 2 Springer Science+Business Media B.V. 2 Abstract Solar sails are a proposed form of spacecraft propulsion using large membrane mirrors to propel a satellite taking advantage of the solar radiation pressure. To model the dynamics of a solar sail we have considered the Earth Sun Restricted Three Body Problem including the Solar radiation pressure (RTBPS). This model has a 2D surface of equilibrium points parametrised by the two angles that define the sail orientation. In this paper we study the non-linear dynamics close to an equilibrium point, with special interest in the bounded motion. We focus on the region of equilibria close to SL, a collinear equilibrium point that lies between the Earth and the Sun when the sail is perpendicular to the Sun sail direction. For different fixed sail orientations we find families of planar, vertical and Halo-type orbits. We have also computed the centre manifold around different equilibria and used it to describe the quasi-periodic motion around them. We also show how the geometry of the phase space varies with the sail orientation. These kind of studies can be very useful for future mission applications. Keywords Centre manifold Graph transform Invariant tori Low thrust Artificially generated equilibrium points Introduction Solar Sails are a proposed form of spacecraft propulsion that takes advantage of the solar radiation pressure to propel a spacecraft by means of a large membrane mirror. The impact of the photons emitted by the Sun on the surface of the sail and its further reflection accelerates the spacecraft. Although the acceleration produced by the solar radiation pressure is A. Farrés (B) À. Jorba Departament de Matemàtica Aplicada i Anàlisi, Universitat de Barcelona, Gran Via 585, 87 Barcelona, Spain ari@maia.ub.es À. Jorba angel@maia.ub.es
3 234 A. Farrés, À. Jorba smaller than the one achieved by the traditional propulsion systems, this one is continuous and unlimited. This makes long term missions more accessible (McInnes 999). It also opens a wide new range of possible mission applications that cannot be achieved by a traditional spacecraft, e.g. Geostorm Warning Mission, Polar Observer and the GeoSail (Macdonald and McInnes 24). The acceleration given by the sail depends on the orientation of the sail and its efficiency. In this paper we consider a flat and perfectly reflecting sail, so the force due to the solar radiation pressure is normal to its surface. The orientation of the sail is parametrised by two angles α and δ and its efficiency is given in terms of the sail lightness number β. To model the dynamics of a solar sail we have taken the Sun Earth Restricted Three Body Problem (RTBP) and added the solar radiation pressure. The Restricted Three Body Problem for a Solar sail (RTBPS) can be seen as a perturbation of the RTBP. If the radiation pressure is discarded (β = or the sail is aligned with the Sun sail direction) the system has five equilibrium points. If we add the solar radiation pressure and the sail is oriented perpendicular to the Sun sail line, the system has the same qualitative behaviour as the RTBP (McInnes 2). For this particular case, we also find 5 equilibrium points, related to the classical Lagrangian points, L,...,5 that we call SL,...,5. When we consider the whole set of possible sail orientations, the system has, for a fixed sail lightness number β =, a 2D families of equilibrium points parametrised by the two angles defining the orientation of the sail (α, δ) (McInnes 999; McInnes et al. 994). These artificially generated equilibrium points offer the possibility of considering very interesting mission applications, two examples would be the Geostorm Warning Mission (Macdonald and McInnes 24; Yen 24) and the Polar Observer Mission (Macdonald and McInnes 24). The Geostorm is a mission concept where a modest sail is placed sunwards of the classical Earth Sun L point. Then with a magnetometer we can detect the solar wind polarity and give enhanced warning of the geomagnetic storms, doubling the time of alert of a conventional L Halo orbiter such as SOHO. The aim of the Polar observer mission is to place a solar sail around an equilibrium point displaced above the ecliptic plane, above one of the Earth s poles. This would provide constant viewing of the polar regions and could be useful to imaging the polar regions or carrying out studies on the climate evolution on the Arctic zone. Both missions require to keep a solar sail close to an unstable equilibrium point. Hence we need to derive a station keeping strategy to maintain a solar sail around it. Several authors have already discussed the controllability of these regions and studied different possibilities for the station keeping of a solar sail around unstable equilibrium points (Rios-Reyes and Scheeres 25; Lisano 25; Bookless and McInnes 25; Farrés and Jorba 28a). In Farrés and Jorba (28a,b) we describe how to use the information of the linear dynamics close to an equilibrium point to derive station keeping strategies. The main idea is to know how the fixed points and their stable and unstable manifolds vary when the sail orientation is changed. A change on sail orientation implies a change on the phase space portrait. If we understand how these changes affect the trajectory of the sail, we can try to change the sail orientation in an appropriate way to make the phase space act in our favour. Using this idea, we can find a sequence of changes for the sail orientation, so that the trajectory of the sail remains close to the equilibrium point. The idea is to maintain the sail orientation fixed for a certain time, and when needed change its orientation. The variations on the sail orientation are small and also is the time needed to change from one orientation to the other, hence as a first approach we can consider these changes to be instantaneous. Other authors, using feedback control find a continuous change on the sail orientation that manages to maintain the sail close to the equilibrium point.
4 Periodic and quasi-periodic motions of a solar sail 235 In this paper we want to study and understand the non-linear dynamics around equilibria. We want to know what other invariant objects exist in the phase space and how they change when we consider different sail orientations. In particular we will describe the families of periodic and quasi-periodic orbits. Some of these invariant objects can offer interesting possibilities for other mission applications. In the near future we want to use this information, to derive strategies in the philosophy of Farrés and Jorba (28a,b), to maintain a solar sail close to some of THESE invariant objects. We will focus on the particular case of α = (i.e. we just allow the sail orientation to vary vertically with respect to the Sun sail line), when the system is time reversible. This will ensure that, under certain constraints on the nature of the equilibrium points, there exists families of periodic and quasi-periodic orbits around equilibria. In Sect. 3 we describe the families of periodic orbits that emanate from different equilibrium points. We find planar and vertical families of periodic orbits, as well as Halo-type orbits. In Sect. 4 we describe the quasi-periodic motion around the equilibrium point, finding new families of periodic orbits and invariant tori around equilibria due to the interaction between the two frequencies defining the centre motions. We will see that if α = δ =, i.e. the sail is perpendicular to the Sun sail line, the qualitative behaviour of the system around the equilibrium point is similar to the behaviour around the collinear point L of the RTBP. There are families of planar, vertical and Halo periodic orbits, as well as families of invariant tori. In McInnes (2) we find a study on the behaviour of this family of Halo orbits for different values of β. We will show how the loss of symmetry of the system when δ = affects this phase space portrait. As the equilibrium points are unstable, we need to be careful with the numerical tools that we use. We have developed our own algorithms to avoid problems during the integration due to the instability of the region. To the computation of the periodic orbits we have used a parallel shooting method. To study the quasi-periodic motion we have performed the reduction to the centre manifold. In Sect. 4. we give some of the main details on how to deal in an efficient way with the computation of this last invariant object. 2 Solar sails in the RTBP To describe the motion of a solar sail in the Earth Sun system, we take the Restricted Three Body Problem for a Solar sail (RTBPS). We assume that the Earth and Sun are point masses moving in a circular orbit around their common centre of mass, and that the sail is a massless particle that is affected by the gravitational attraction of both bodies and the solar radiation pressure. The units of mass, distance and time are normalised so that the total mass of the system is, the Earth Sun distance is and the period of its orbit is 2π. Weusearotation reference system so that Earth and Sun are fixed on the x-axis, z is perpendicular to the ecliptic plane and y defines an orthogonal positive oriented reference system (Fig. left). We consider the solar sail to be flat and perfectly reflecting. This means that the force due to the solar radiation pressure is in the normal direction to the surface of the sail. In such case, the force due to the sail is given by, F sail = β μ rps 2 r s, n 2 n, where β represents the sail lightness number, r s is the Sun line direction and n is the normal direction to the surface of the sail (both vectors have norm ). The sail orientation is parametrised by two angles, say α and δ: α is the angle between the projection of the Sun sail
5 236 A. Farrés, À. Jorba Fig. Left: Schematic representation of the position of the two primaries and the solar sail in the synodical reference system. Right: Graphic description of the two angles defining the sail orientation line and the normal vector to the surface of the sail n on the ecliptic plane; δ is the difference between: a) the angle between the projection of the Sun sail line with the ecliptic plane; and b) the angle of the normal vector n with the ecliptic plane (see Fig. right). There are other possibilities to define these angles, see (McInnes 999; Rios-Reyes and Scheeres 25). The equations of motion are, ( μ) Ẍ = 2Ẏ + X (X μ) μ ( μ) (X μ + ) β r s, n 2 N X, Ÿ = 2Ẋ + Y Z = ( ( μ) r 3 PS r 3 PS ( ( μ) r 3 PS + μ r 3 PE + μ r 3 PE r 3 PE r 3 PS ) ( μ) Y β r s, n 2 N Y, () r 3 PS ) ( μ) Z + β r s, n 2 N Z, r 3 PS where, r PS = (X μ) 2 + Y 2 + Z 2,andr PE = (X μ + ) 2 + Y 2 + Z 2,arethe Sun sail and Earth-sail distances, respectively, r s = (X μ, Y, Z)/r PS is the normalised Sun sail direction and n = (N X, N Y, N Z ) is the normal direction to the surface of the sail. Using the above definition for the sail orientation, N X = X μ Z(X μ) cos α cos δ r PS r PS r 2 Y N Y = cos α cos δ r PS N Z = Z r PS cos δ + r 2 r PS sin δ, cos α sin δ Y sin α cos δ + r PS YZ cos α sin δ + X μ sin α cos δ r PS r 2 r PS YZ sin α sin δ, r PS r 2 Z(X μ) sin α sin δ, r PS r 2 where r 2 = (X μ) 2 + Y 2.Asn cannot point towards the Sun there are some restrictions on the normal direction, namely r s, n. Notice that if β = or r s, n =thesolar radiation pressure is discarded and we have the RTBP. As we know, the RTBP can be expressed as a Hamiltonian system by introducing the momenta: P X = Ẋ Y, P Y = Ẏ + X, P Z = Ż. Unfortunately, when we introduce the solar radiation pressure the Hamiltonian character of the system only holds for a small set of sail orientations: when the sail is aligned with the Sun sail line (i.e. r s, n = so there is no sail effect) and when the sail is perpendicular to the Sun sail line (i.e. r s, n =). For the other cases, the system is not Hamiltonian, but it is still conservative (it is easy to check that, for
6 Periodic and quasi-periodic motions of a solar sail β β 2 β 3 β 4 β β β 2 β 3 β 4 β β 5 β 4 β 3 β 2 β Fig. 2 Families of equilibrium points for β =., β 2 =.5, β 3 =., β 4 =.5 and β 5 =.2. From left to right: thefl, FL 2 and FL 3 families of equilibria β β β β β 2 β 3 β 4 β β β Fig. 3 FL 4 family of equilibrium points for β =., β 2 =.5, β 3 =., β 4 =.5 and β 5 =.2. From left to right: XY projection and XZ projection a fixed sail orientation, the divergence of the vector field is zero, hence the volume in phase space is preserved by the flow). There is another particular case that offers interesting properties: when α = and δ [ π/2 : π/2]. This means that we only allow vertical variations on the sail orientation with respect to the Sun line. Here the system is time reversible by the symmetry R : (X, Y, Z, Ẋ, Ẏ, Ż) (X, Y, Z, Ẋ, Ẏ, Ż). Hence, under certain constraints on the nature of the equilibrium points the system behaves locally as a Hamiltonian (Sevryuk 986). In this paper we will focus on this particular case. It is well known that the RTBP has 5 equilibrium points L,...,5 (Szebehely 967). When the effect of the solar radiation pressure is added these 5 equilibrium points are replaced by a 2D family of equilibrium points parametrised by the two angles α and δ.ifwetakeα = there are five D families of equilibria, that we call FL,...,5, parametrised by the angle δ. Each of families contains one of the classical Lagrangian equilibrium points L,...,5 and the displaced equilibrium point SL,...,5. In Figs. 2 and 3 we can see these families for different values of β. Notice that as β increases these families get larger, having fixed points higher above the ecliptic plane and closer to the Sun. In Fig. 2 we have the families FL (left), FL 2 (centre) and FL 3 (right) for different values of β, all of them are contained on the Y = plane. For small values of β, all of these equilibrium points are unstable and their spectrum is of the form {±λ, ±iω, ±iω 2 }.In Fig. 4 we show the spectrum of the fixed points for β = For large β the spectrum SL,...,5 are the equilibrium points of the system when the sail is oriented perpendicular with respect to the Sun sail line. They are placed near the classical Lagrangian points L,...,5 butclosertothesun(farrés and Jorba 29).
7 238 A. Farrés, À. Jorba FL Spectrum FL 2 Spectrum FL 3 Spectrum λ iω iω λ iω iω λ iω iω Fig. 4 Spectrum of the equilibrium points on the FL, FL 2 and FL 3 families for β = FL 4 Spectrum λ iω iω 2.5 FL 5 Spectrum λ iω iω e-8-4e-8-2e-8 2e-8 4e-8 6e e-8-4e-8-2e-8 2e-8 4e-8 6e-8 Fig. 5 Spectrum of the equilibrium points on the FL 4 and FL 5 families for β =.5689 of some of the equilibrium points is of the form {±λ, ±λ 2, ±iω } (Waters and McInnes 27, 28). In Fig. 3 we have the FL 4 family for different values of β, it is no longer on the Y = plane. The FL 5 family is symmetric to FL 4 with respect to Y =. The spectrum for all these points is {γ ± iω,γ 2 ± iω 2,γ 3 ± iω 3 },whereγ i = with γ >,γ 2 < andγ 3 positive on FL 4 and negative on FL 5.InFig.5 we see the spectrum for β =.5689 for FL 4 and FL 5. Notice that although γ i =, it is very small. Hence, the equilibrium points on these two families present a very mild instability. Our aim is to understand the dynamics of the system around different unstable equilibria of these families. We will consider the sail orientation to be fixed along time and study the dynamics for different sail orientations. In Sect. 3 we will describe the families of periodic orbits that appear around different equilibrium points. In Sect. 4 we will perform the reduction to the centre manifold around the equilibrium points and use it to describe the bounded motion around them. In what follows we focus on the FL family for β =.5689 and δ close to zero. The equilibrium points on the FL family for δ small are placed between the Earth and the Sun close to the displaced collinear equilibrium point SL. We consider this region to be relevant for possible mission applications. Taking β =.5689 corresponds to a sail with a characteristic acceleration of.3mm/s 2 or a sail loading of 3 g/m 2. This sail lightness number has been considered for the Geostorm Mission and is thought to be a reasonable value for a near term mission application (McInnes 999; Macdonald and McInnes 24; Waters and McInnes 27). Although we only focus on a neighbourhood of equilibria of the family FL, the same numerical tools that we have used here can be applied to study the motion around the equilibrium points on the FL 2,3 families.
8 Periodic and quasi-periodic motions of a solar sail Periodic motion It is well known that if we have a fixed point p on a Hamiltonian system, with ±iω as an eigenvalue, then under suitable non-resonance conditions with respect to the remaining eigenvalues λ i, the Lyapunov Centre Theorem (Meyer and Hall 99) ensures that there exist a one-parametric family of periodic orbits emanating from p, with limiting period 2π/ω. Unfortunately the Hamiltonian character of the set of equations when α = is only true for 3valuesofδ (δ = that happens when the sail oriented perpendicular to the Sun sail line and δ =±π/2 when the sail is aligned with the Sun sail line and there is no sail effect). As we will see in this section and the next one, the qualitative behaviour in these cases is the same. In any case, we have already mentioned that for α = the RTBPS is time R-reversible by R : (t, X, Y, Z, Ẋ, Ẏ, Ż) ( t, X, Y, Z, Ẋ, Ẏ, Ż). It is known (Sevryuk 986; Lamb and Roberts 998), that under certain constraints a time reversible system behave locally as Hamiltonian systems around an equilibrium point. In particular, around such a point the Lyapunov Centre Theorem (Devaney 976; Moser 958; Sevryuk 986; Lamb and Roberts 998) and KAM Theory (Sevryuk 998; Lamb and Roberts 998) also apply. Theorem (Devaney 976) Let ẋ = f (x), with f C 2 and x R 2n be an autonomous R-reversible dynamical system, where dim(fix(r)) = n. Let p be a fixed point such that R(p ) = p, and with ±iω,±λ 2,...,±λ n as eigenvalues. Then, if λ i we have that iω/λ i / Z, there exists a one-parametric family of periodic orbits emanating from p, where the period of these orbits tends to 2π/ω when approaching p. This Theorem is commonly known as Devaney Lyapunov Centre Theorem, for further details see (Devaney 976; Sevryuk 986). One can check that the only equilibrium points that remain fixed by R are the ones on the FL, FL 2 and FL 3 families. Hence, the local behaviour around these equilibria will be Hamiltonian. Theorem (Devaney 976)assures that under non-resonant conditions between the frequencies ω,ω 2 we have two families of periodic orbits emanating from the fixed point. In this section we want to describe the two families of periodic orbits that appear around an equilibrium point of the FL family. We distinguish the two families by their vertical oscillation, the family related to ω 2 has a wider vertical oscillation than the one emanating from ω. Then, we call the P-Lyapunov Family to the family of periodic orbits emanating from p related to ω and the V-Lyapunov Family to the family emanating from p related to ω 2. Due to the symmetric reversibility properties of the system, all these families of periodic orbits are symmetric with respect to Y =. Furthermore, for δ small, the P-Lyapunov Family cross transversally Y = andthev-lyapunov Family cross transversally Z = Z just two times. From now on, we will only consider δ>, as the systems is also symmetric by S : (X, Y, Z, Ẋ, Ẏ, Ż,δ) (X, Y, Z, Ẋ, Ẏ, Ż, δ). We start taking δ = and studying the behaviour of the two families of periodic orbits, then we see how these families vary when δ =. To compute the families of periodic orbits, we have designed our own routines for the numerical computation and continuation of periodic orbits. For each of the families we have
9 24 A. Farrés, À. Jorba.5. δ =. c x s s x s 6 5 δ =. s s2.5 stab Fig. 6 P-family of periodic orbits for δ =. Left: bifurcations diagram for the continuation of periodic orbits with respect to X, continous line for centre saddle orbits, dashed line for saddle saddle orbits. Right: evolution of the stability parameters s and s 2 along the family of periodic orbits taken into account the transversality properties mentioned before. To deal with the instability of the region and to avoid difficulties in the integration of the periodic orbits we have used a multiple shooting method (Stoer and Bulirsch 22) using two spatial sections. For the P-Family we have taken the sections Ɣ ={Y =, Ẏ > } and Ɣ 2 ={Y =, Ẏ > }, and for the V-Family we have taken the sections ={Z = Z, Ż > } and 2 ={Z = Z, Ż > }. As an initial guess for the continuation we can take the linear approximation of the solutions of the flow. We must also mention that due to the symmetries on the equations, if we take the cross section Ɣ and Ɣ 2 we can save time by just integrating half of the period. We have also computed the stability of the periodic orbits on each family. As we know, if φ t (x) is the flow associated to an ODE, the normal behaviour around a T -periodic orbit through x is given by the monodromy matrix M = Dφ T (x ).Asweareinareversible system, the eigenvalues come in pairs, hence spect(m) ={,,λ,λ,λ 2,λ 2 }. We define the stability parameters of the periodic orbit as s i = λ i + λi for i =, 2. We use them to describe the stability of the periodic orbit. Each s i is related to an invariant plane by M, they can either be hyperbolic (s i R, s i > 2), elliptic (s i R, s i < 2), parabolic (s i R, s i =2) or complex unstable (s i C \ R). The periodic orbit has an hyperbolic direction if one of the s i is hyperbolic and that it has an elliptic direction if one of the s i is elliptic. Notice that if s is complex unstable, then s 2 is also complex unstable, in fact s 2 = s. 3. P-family of periodic orbits In all the computations we have considered the X coordinate of the point where the orbit crosses the section Ɣ as the parameter of continuation. When δ = the periodic orbits that are born at the equilibrium point are totally contained on the Z = plane. In Fig. 6 we can see the continuation scheme, on the x-axis we have the continuation parameter (X) and on the y-axis the Z component of the point of the orbit on the section Ɣ. When X reaches a critical value, a pitchfork bifurcation takes place, and two new periodic orbits are born, commonly known as Halo orbits. On the left-hand side of Fig. 6 we can see this bifurcation, the continous line corresponds to those periodic orbits with one elliptic and hyperbolic direction, and the dashed line to those
10 Periodic and quasi-periodic motions of a solar sail P - Family Halo.5. Halo Fig. 7 XY projection on the Planar Lyapunov periodic orbits on the P-Family (left). Stability parameters of the planar family of periodic orbits (right) Halo Halo 2 Planar Halo Halo 2 Planar Fig. 8 Different projections on the XYZ space of the 3 different branches of periodic orbits for δ =..5. δ =. c x s s x s.5. c x s s x s Fig. 9 Bifurcation diagram for the continuation of periodic orbits with respect to X of the P-Family of periodic orbits for different sail orientations (δ).for δ =. (left). Evolution of the bifurcation diagram for δ =,.,.5,. (right) orbits with two hyperbolic directions. On the right-hand side of Fig. 6 we have the evolution on the stability parameters along the family. On the left hand side of Fig. 7 we see the planar periodic orbits on the P-Family, before and after the bifurcation point, this family is totally contained on the Z = plane. In Fig. 7 (middle and right) we see different projections of one of the two families of Halo orbits. The families of Halo-type orbits for a solar sail in the RTBP when the sail is perpendicular to the Sun sail line were found by McInnes (2). There he studied the behaviour of these families for different values of β around SL and SL 2. The other family of Halo orbits is symmetric to this one with respect to Z =. Finally, in Fig. 8 we have two different 3D projections on the position space of the three branches of the periodic orbits on the family. When δ =, as we can see in Fig. 9 there is no longer a pitchfork bifurcation giving rise to two Halo-type orbits as it happened for δ =. Now two of the branches have split, leaving a family of periodic orbits with no change in the stability and another family with a
11 242 A. Farrés, À. Jorba.2 P Family B.5. P Family B.5. P Family B Fig. For δ =.. Different projections of the periodic orbits on P-Family that emanate form the fixed pint. From left to right: XY projection, XZ projection and YZ projection.3 P Family A.5 P Family A.5 P Family A Fig. For δ =.. Different projection of the periodic orbits on P-Family that appear after a saddle node bifurcation. From left to right: XY projection, XZ projection and YZ projection Fami A Fami B Fami A Fami B Fig. 2 Different projections on the XYZ space of the 2 disconnected branches of periodic orbits for δ =. saddle-node bifurcation (Fig. 9 left). This is due to a symmetry breaking (Gulobitski et al. 985; Crawford 99) in the system. On the right-hand side of Fig. 9, we can see the evolution of the continuation scheme when we vary δ. Notice that the separation between the two branches increases with δ. In Figs. and we can see different projections of these two families for δ =.. In Fig. we have the family that emanates from the equilibrium point. We can see how, as the orbits amplitude increases, they gain Z amplitude ending up looking like Halo type orbits. Here all the periodic orbits have one hyperbolic and one elliptic direction. In Fig. we see the family of periodic orbits that appears after the saddle-node bifurcation. The orbits on the other branch of the family that have less Z oscillation have two hyperbolic directions, while the other ones have one hyperbolic and one elliptic direction. Finally, in Fig. 2 we have different 3D projections, on the position space, of the two disconnected branches of the P-Family of periodic orbits for δ =.. We can see that qualitatively behaviour for δ = is not that different to the one for δ =, in both cases we find planar and Halo-type orbits.
12 Periodic and quasi-periodic motions of a solar sail V - Family.3 V - Family.3 V - Family Fig. 3 For δ =. Different projections of the periodic orbits on the V-family. From left to right: XY projection, XZ projection and YZ projection.8 V - Family.3.2 V - Family.3.2 V - Family Fig. 4 For δ =.. Different projections of the periodic orbits on the V-family. From left to right: XY projection, XZ projection and YZ projection 3.2 V-family of periodic orbits Now for all the computations we have considered the Ż coordinate of the point where the orbit crosses the section as the parameter of continuation. When δ = the periodic orbits are symmetric with respect to the planes Z = and Y =. In Fig. 3 we have different projections of this family of periodic orbits. We can see that these orbits have a bow tie shape. All of them have one hyperbolic and one elliptic direction. For δ = the family of periodic orbits is only symmetric with respect to the Y = plane. Periodic orbits that are born at the equilibrium point are seen as circles on the XZ projection. As we move along the family, their shape changes and they also look like a bow tie, although it is no longer symmetric. For small δ, the shape of most of the orbits in the family is still like abowtie.wecanseethatasδ increases there is more difference between the two loops on the bow tie. In Fig. 4 we have different projections of this family for δ =.. As before, all of these periodic orbits have one hyperbolic and one elliptic direction. Finally, in Fig. 5 we have 3D projections on the position space of these families for different values of δ. We can see clearly how these families get more asymmetric as δ increases. In the picture we have δ =,.5,. and.3. 4 Quasi: periodic motion In the previous section we have described the families of periodic orbits that appear around the fixed points and studied their stability. Now we want to give a more detailed description of the non-linear dynamics around the equilibrium point. As we know, the linear dynamics of the fixed points on the FL family is the cross product of a saddle and two complex directions with zero real part and we want to
13 244 A. Farrés, À. Jorba δ = δ = δ =. δ = Fig. 5 Projections on the XYZ space of the V-Family of periodic orbits for different values of δ.fromleft to right, top to bottom: δ =,δ =.5,δ =. and δ =.3 study the bounded motion around them. Due to the instability produced by the saddle, taking arbitrary initial conditions and integrating them numerically to produce plots of the orbits is not a good option as the trajectories will escape quickly. To get rid of the instability produced by the saddle, we have performed the so-called reduction to the centre manifold. We call centre manifold to an invariant manifold that is tangent to linear subspace generated by the different pairs of complex eigenvectors that correspond to the complex eigenvalues with zero real part. We know that this invariant manifold might not be unique, although the Taylor expansion of the graph of this invariant manifold at the equilibrium point is (Carr 98; Sijbrand 985; Vanderbauwhede 989). The reduction to the centre manifold process consists in finding a high order approximation of this invariant manifold and to restrict the flow to it. The main idea to compute the manifold is to uncouple the saddle direction from the other directions up to high order. Then, neglecting the reminder we obtain a high order approximation of the flow on an invariant manifold that does not contain the saddle. In this way we can do numerical integrations and study the motion around the equilibrium point on the centre manifold. If the system is Hamiltonian we can compute this manifold using a partial normal form scheme on the Hamiltonian (Jorba 999), but this is not the case, as the system is Hamiltonian only for a small set of parameters. To deal with this situation we have used the graph transform method (Carr 98; Simó 99; Farrés and Jorba 29). The idea is to compute, formally, the power expansion of the graph of the centre manifold at the equilibrium point. In Sect. 4. we give the main ideas of the algorithm that we have used to compute the graph of the centre manifold y = v(x) in an efficient way, for further details on the algorithm see (Farrés and Jorba 29). Finally, we have computed the centre manifold around several equilibrium points on the FL family. For each one we have computed the Taylor series of the graph of the centre manifold up to degree 6. In Sect. 4.2 we will use this manifold to study the local dynamics around the different equilibrium point.
14 Periodic and quasi-periodic motions of a solar sail Reduction to the centre manifold Let ż = F(z) be an ordinary differential equation where z R 6 and has a fixed point of the type centre centre saddle. Without loss of generality we can assume that the fixed point is at the origin. It is well known that with an appropriate linear transformation, the equations of motion can be written as: ẋ = Ax + f (x, y), (2) ẏ = By + g(x, y), where x R 4, y R 2, all the eigenvalues of the matrix A have zero real part and all the eigenvalues of the matrix B are real. The functions f and g are sufficiently smooth and satisfy, f (, ) =, D x,y f (, ) =, g(, ) =, D x,y g(, ) =, where D x,y denotes the first derivative with respect to (x, y). Note that y = is the linear approximation to the centre manifold. We are interested in finding y = v(x) with v() = and D x v() =, the local expression of the centre manifold. If we substitute this on Eqs. 2, we have that v(x) must satisfy: Bv(x) + g(x,v(x)) = D x v(x)[ax + f (x,v(x))], (3) and the flow restricted to the manifold is given by, ẋ = Ax + f (x,v(x)). (4) To fix notation, if x = (x,..., ) is a vector of complex numbers and k = (k,...,k 4 ) a vector of integer numbers, we define k =k + +k 4 and denote x k = x k...xk 4 4 (here = ). Let us assume that ±λ, ±iω and ±iω 2 are the eigenvalues of D z F, and that we have performed a linear transformation such that A and B are in diagonal form. We want to find y = v(x) that satisfies Eq. 3. Wetakev(x) = k 2 v kx k, with v k R 2, the power expansion of v(x) around the origin and we want to find the values v k = (vk,v2 k ) up to high order. This way we have a good approximation of the centre manifold, for instance, if we have v(x) = N k =2 v k x k that satisfies Eq. 3 up to order N, then v(x) approximates the graph of the centre manifold up to the same order, i.e. v(x) v(x) = O( x N ).And ẋ = Ax + f (x, v(x)) is a high order approximation of the flow on the centre manifold. Notice that Eq. 3 can be rewritten as, D x v(x)ax Bv(x) = g(x,v(x)) D x v(x) f (x,v(x)), (5) where the left-hand side of this equation is a linear operator with respect to v(x) and the right-hand side a non-linear one. As A and B are in diagonal form, then the left-hand side of Eq. 5 takes the diagonal form, (iω k iω k 2 + iω 2 k 3 iω 2 k 4 λ) v k xk k 2 D x v(x)ax Bv(x) = (iω k iω k 2 + iω 2 k 3 iω 2 k 4 + λ) vk 2 xk. (6) k 2 Let h(x) = g(x,v(x)) D x v(x) f (x,v(x)) be the right hand side of Eq. 5. We take its expansion h(x) = k 2 h kx k around the origin (h k = (h k, h2 k )), where the coefficients
15 246 A. Farrés, À. Jorba h k depend on the coefficient of v k in a known way. It can be seen that the coefficients h k for k =n depend on v k with k < n (see Farrés and Jorba 29). Hence, we can find the coefficients v k up to degree N in an iterative way. We already know that v k = for k =,, as v() = andd x v() =. Then we can compute v k for k =2,...,N by solving at each step the diagonal linear system in Eq. 5. This process is carried out up to a sufficiently high order N. Finally, we have the expansion up to degree N of the local central manifold, v(x) = N v k x k. k 2 Once this is done, we are ready to explore the phase space. We will use ẋ = Ax + f (x, v(x)) to integrate the flow and have a good description of the motion on the centre manifold. Remark To have an efficient algorithm, we need to find an efficient way to compute the coefficients h k. As we know they come from the expansion around the origin of h(x) = g(x,v(x)) D x v(x) f (x,v(x)). Expanding g(x, y) and f (x, y) and then composing with v(x) is NOT a good option, as it is very hard in terms of computational time. To obtain a more efficient algorithm we propose to find a recurrent expressions for the expansion of the non-linear terms and use these expressions to compute the composition of these functions with v(x). For more details on how to use these recurrent expression see (Farrés and Jorba 29). Remark 2 It is not necessary to have A and B in their diagonal form, but then the linear part of Eq. 5 will not take a diagonal form. Then, as we increase the degree, the dimension of the linear system we have to solve increases and so does the computational cost and error propagation while solving it. The linear system can be solved if and only if iω (k k 2 ) + iω 2 (k 3 k 4 ) λ =. This is always true as λ R \{} and iω, iω 2 are pure imaginary numbers. 4.2 Dynamics on the centre manifold Using the algorithm explained before we have computed the centre manifold around several equilibrium points of the FL family (i.e. different sail orientations). For each one we have computed the Taylor series up to degree 6 of the graph of the centre manifold, y = v(x). Using an Intel Xeon CPU at 3.4 GHz this takes around 22 s of CPU time. Once we have reduced to the centre manifold, we are on a 4D phase space. Let (x,,, ) be the local coordinates on the centre manifold. A 4D phase space is difficult to visualise, so we need to perform suitable Poincaré sections to reduce the phase space dimension When the sail is perpendicular As we have already said, when δ =, the system is still Hamiltonian. We take advantage of this to help us visualise the phase space. As we know, the Jacobi constant J C = (Ẋ 2 + Ẏ 2 + Ż 2 ) 2 (X, Y, Z),

.")


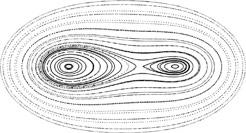
16 Periodic and quasi-periodic motions of a solar sail J c = J c = x x J c = J c = x x Fig. 6 For δ = ; Poincaré section x3 = for different energy levels. From left to right, top to bottom J C = , , , with the modified potential (X, Y, Z) = 2 (X 2 + Y 2 ( μ)( β) ) + r PS + μ r PE,isafirst integral of the system. Hence it remains constant along time for a given trajectory. We group the trajectories on the phase space by the value of the Jacobi constant (J C ). To visualise the dynamics on the centre manifold, we first take the Poincaré section = and fix J C to determine. One can check that taking = is the same as to take z = and that is related to ż. Hence, x, are a linear transformation of the {x, y}-plane. For each J C we take several initial conditions and compute 5 iterates on the Poincaré sections. Figure 6 shows the results for J C = , , and We can see that for a fixed J C, the motion on the section is bounded by the Planar Lyapunov orbit, which is fully contained on this section. The Vertical Lyapunov orbit is the central fixed point, as it crosses transversally this section close to the origin. For small values of J C, the coupling of the two frequencies, ω and ω 2,givesrisetoa family of invariant tori. As J C varies, the Planar Lyapunov orbit changes its stability and the well know Halo orbits appear (see Sect. 3.). These orbits correspond to the two new fixed points on the section, as the Halo orbits also cross transversally this section. We still see families of invariant tori around the fixed points and around the two Halo orbits. Notice that = is not the only Poincaré section that we can do. We chose this one for classical reasons, and because we know that Z = is a cross section and the motion is symmetric with respect to this plane. But we could chose another one, for instance Y = is also a cross section and a symmetry plane. Now taking = is similar to taking Y =. Then we determine x from the J C,that is similar to taking Ẏ. Now we repeat the same process as before, take a value for J C and several initial conditions, and compute 5 Poincaré sections for each one. Figure 7 shows the results for the same energy levels as before.




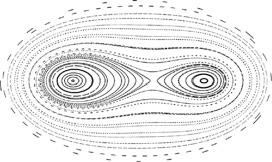
17 248 A. Farrés, À. Jorba.8 J c = J c = J c = J c = Fig. 7 For δ = ; Poincaré section for = for different energy levels. From left to right, top to bottom J C = , , , Now the Planar Lyapunov orbit is the central fixed point. As before, we can see that for small values of the energies, we have a family of invariant tori due to the coupling of the two frequencies. As the energy level increases the Planar Lyapunov orbit changes its stability and the two Halo orbits appear. Here we can clearly appreciate the pitchfork bifurcation of the Planar Lyapunov orbit that gives rise to the Halo orbits that was mentioned in Sect. 3. We note that the behaviour here is qualitatively the same as for the RTBP close to the collinear points. Now we want to see how this varies when the sail is no longer perpendicular to the Sun line (i.e. when δ = ) When the sail is not perpendicular Now we take different values for the sail orientation δ =.5 and δ 2 =. and do the same analysis. The main difference is that now the system is not Hamiltonian, hence we do not have a first integral to help us reduce the phase space dimension. Nevertheless, we use the quantity: J C = (Ẋ 2 + Ẏ 2 + Ż 2 ) 2 (X, Y, Z) + 2β( μ) Zr 2 rps 3 cos 2 δ sin 2 δ. Notice that for δ =, J C is the Jacobi constant that we have used before. This value varies little along the trajectories, we will use it as an approximated energy level and will help us to compare the Hamiltonian behaviour with this non-hamiltonian one. When the system is Hamiltonian and we take several initial conditions with the same energy level, their trajectories are in the same surface of fixed energy. Hence, we are reducing in one the phase space dimension. When the system is not Hamiltonian and we take several initial conditions with the same J C, the approximated energy level, the value J C




18 Periodic and quasi-periodic motions of a solar sail J c = J c = x x J c = J c = x x Fig. 8 For δ =.5; Poincaré section for = for different Ĵ C.Fromleft to right, top to bottom J C = , , , does not remain fixed for all of the points on the trajectories. But it can be seen that close to the equilibrium point, J C varies slightly. We can say that the orbits are on a thin neighbourhood of the surface J C = constant. Then, the projection of the trajectories on a fixed surface of fixed J C should be good enough. As before we first perform the Poincaré section =. Now this is like taking the cross section Z = Z.Weusethe J C to determine, that is related to Ż. We now take different initial conditions (x, ) and perform 5 iterates on the Poincaré section for different J C. Figures8and 9show, forδ =.5 andδ =., respectively, these Poincaré sections for J C = , , and As before, we see that for small energy levels the coupling between the two frequencies gives rise to families of invariant tori around the equilibrium point. Now the central fixed point corresponds to the Vertical Lyapunov periodic orbit, that crosses transversally this section, and the Planar Lyapunov orbit bounds the motion on the section. As J C varies, one Halo orbit appears, seen as the fixed point that appears on the right hand side of the Poincaré sections. If we remember the behaviour of the P-Family of periodic orbits for δ = in Sect. 3., this family starts with a small Ż amplitude. There is a point close to the saddle node bifurcation where the Ż amplitude starts to grow significantly, having Halo-type type orbit. When the orbit gains Z amplitude, it is transversal to this Poincaré section, and we see it appear as a new fixed point. When the saddle-node bifurcation takes place, another Halo-type orbit appear, as can be seen in Figs. 8 and 9. We can see that the two Halo orbits are no longer symmetric to each other, as well as the behaviour around them. Now we take the Poincaré section =, which is at first order equivalent to Y =, and we fix J C to determine x. As before we take several initial conditions (, ) and perform 5 iterates on the Poincaré section for different J C. Figures. 2 and 2 show, for δ =.5 and δ =., respectively, the Poincaré section = for different values for J C.






19 25 A. Farrés, À. Jorba.5 J c = J c = x x J c = J c = x x Fig. 9 For δ =.; Poincaré sections for = for different Ĵ C.Fromleft to right, top to bottom J C = , , , J c = J c = J c = J c = Fig. 2 For δ =.5; Poincaré sections for = for different Ĵ C.Fromleft to right, top to bottom J C = , , ,




20 Periodic and quasi-periodic motions of a solar sail 25.8 J c = J c = J c = J c = Fig. 2 For δ =.; Poincaré sections for = for different Ĵ C.Fromleft to right, top to bottom J C = , , , Now the fixed point in the centre corresponds to an orbit of the P-Family. For small values of J C we just see the families of invariant tori around the fixed point. As this energy increases, we can see how the fixed point, i.e. Planar Lyapunov Orbit, shifts to the left, and two new periodic orbits appear, one stable and one unstable, giving rise to the new Halo-type orbit. Here we can clearly appreciate the saddle-node bifurcation on the family of periodic orbits that was seen in Sect. 3.. If we remember Fig. 7, we saw that the planar family of periodic orbits experiences a pitchfork bifurcation as the energy level increases, which gives rise to the Halo orbits. Now in Figs. 2 and 2 we can see how for δ =, due to the symmetry breaking on the equations motion, this bifurcation is replaced by a saddle-node bifurcation. The main different between the behaviour for δ =.5 or δ =. is that the phase space is less symmetric as δ increases. 5Conclusion In this paper we have focused on the understanding of the non-linear dynamics for different equilibrium points close to the displaced collinear point SL. We have restricted to the particular case α = to take advantage of the reversible character of the system, as it ensures the existence of families of periodic orbits and invariant tori. For this study we have computed the families of periodic orbits by means of a continuation method. Furthermore, we have performed the reduction to the centre manifold using the graph transform method around the different equilibrium points to have a better understanding of the bounded motion.
21 252 A. Farrés, À. Jorba We find that when the sail is perpendicular to the Sun line the system behaves qualitatively as the RTBP. The two frequencies defining the centre motion give rise to two families of periodic orbits, a planar and a vertical family, and we find families of invariant tori due to the coupling of the two frequencies. As we move along the planar family of periodic orbits a pitchfork bifurcation takes place, and two families of Halo-type orbits appear. When the sail is no longer perpendicular to the Sun line (δ = ) this behaviour varies slightly. We still have two families of periodic orbits emanating from the two fixed points, each one related to one of the two frequencies defining the centre motion. We no longer have a pitchfork bifurcation that gives rise to the Halo-type orbits, this one has been replaced by a saddle-node bifurcation due to the symmetry breaking of the system. Finally, we also find families of invariant tori due to the interaction between the two frequencies. The applicability of these new families of periodic orbits is yet to be discussed. But for instance, a mission in the philosophy of Geostorm could be considered, where the sail would orbit around a Halo orbit for a solar sail perpendicular to the Sun sail line. These orbits are closer to the Sun than a Halo orbit of the RTBP and would also allow early enhanced warning of the Sun s geomagnetic storms. A study on the controllability of these orbits and a comparison on the advantages of maintaining a sail around these orbits should be done to make further conclusions. Another interesting application, would be to consider a periodic orbit high above the ecliptic plane, with the same period as the Earth s rotation axis. With such an orbit it would be able to track a certain region of the Earth s pole (Waters and McInnes 27). Finally, let us mention that in a real application one should also consider other effects (planets, variations in the solar radiation pressure, etc), including errors in the position and orientation of the sail (for instance, α cannot be exactly zero as needed for the orbits in this paper). This, jointly with the natural instability of these orbits, implies the use of a station keeping strategy. Acknowledgments 29 SGR 67. This work has been supported by the MEC grant MTM and the CIRIT grant References Bookless, J., McInnes, C.R.: Control of Lagrange point orbits using solar sail propulsion. In: Proceedings of the 56th International Astronautical Congress (25) Carr, J.: Applications of Centre Manifold Theory. Springer, New York (98) Crawford, J.D.: Introduction to bifurcation theory. Rev. Modern Phys. 64, (99) Devaney, R.L.: Reversible diffeomorphisms and flows. Trans. Am. Math. Soc. 28, 89 3 (976) Farrés, A., Jorba, À.: Dynamical system approach for the station keeping of a solar sail. J. Astronaut. Sci. 58, (28a) Farrés, A., Jorba, À.: Solar sail surfing along families of equilibrium points. Acta Atronaut. 63, (28b) Farrés, A., Jorba, À.: On the high order approximation of the centre manifold for ODEs. preprint (29) Gulobitski, M., Schaeffer, D.G., Stewart, I.N.: Singularities and Groups in Bifurcation Theory. Springer, New York (985) Jorba, À.: A methodology for the numerical computation of normal forms, centre manifolds and first integrals of Hamiltonian systems. Exp. Math. 8, (999) Lamb, J.S.W., Roberts, J.A.G.: Time-reversal symmetry in dynamical systems: a survey. Phys. D Nonlinear Phenom. 2, 39 (998) Lisano, M.: Solar sail transfer trajectory design and station keeping control for missions to Sub-L equilibrium region. In: Proceedings of the 5th AAS/AIAA Space Flight Mechanics Conference. Colorado (25) Macdonald, M., McInnes, C.R.: A near-term road map for solar sailing. In: Proceedings of the 55th International Astronautical Congress, Vancouver (24)
DYNAMICS OF A SOLAR SAIL NEAR A HALO ORBIT
 DNAMICS OF A SOLAR SAIL NEAR A HALO ORBIT A. Farrés a,, À. Jorba a a Departament de Matemàtica Aplicada i Anàlisi, Univeritat de Barcelona Gran Via de les Corts Catalanes 585, 87 Barcelona, Spain Abstract
DNAMICS OF A SOLAR SAIL NEAR A HALO ORBIT A. Farrés a,, À. Jorba a a Departament de Matemàtica Aplicada i Anàlisi, Univeritat de Barcelona Gran Via de les Corts Catalanes 585, 87 Barcelona, Spain Abstract
IAC-07-C SOLAR SAIL SURFING ALONG FAMILIES OF EQUILIBRIUM POINTS
 58th International Astronautical Congress, Hyderabad, India, 24-28 September 2007. Copyright IAF/IAA. All rights reserved. IAC-07-C1.4.04 SOLAR SAIL SURFING ALONG FAMILIES OF EQUILIBRIUM POINTS Ariadna
58th International Astronautical Congress, Hyderabad, India, 24-28 September 2007. Copyright IAF/IAA. All rights reserved. IAC-07-C1.4.04 SOLAR SAIL SURFING ALONG FAMILIES OF EQUILIBRIUM POINTS Ariadna
STATION KEEPING OF A SOLAR SAIL AROUND A HALO ORBIT
 IAA-AAS-DyCoSS1-11-3 STATION KEEPING OF A SOLAR SAIL AROUND A HALO ORBIT Ariadna Farrés and Àngel Jorba INTRODUCTION Solar sails are a concept of spacecraft propulsion that takes advantage of solar radiation
IAA-AAS-DyCoSS1-11-3 STATION KEEPING OF A SOLAR SAIL AROUND A HALO ORBIT Ariadna Farrés and Àngel Jorba INTRODUCTION Solar sails are a concept of spacecraft propulsion that takes advantage of solar radiation
Solar Sailing near a collinear point
 Solar Sailing near a collinear point 6th AIMS International Conference on Dynamical Systems and Differential Equations 26 Ariadna Farrès & Àngel Jorba Departament de Matemàtica Aplicada i Anàlisi Universitat
Solar Sailing near a collinear point 6th AIMS International Conference on Dynamical Systems and Differential Equations 26 Ariadna Farrès & Àngel Jorba Departament de Matemàtica Aplicada i Anàlisi Universitat
Periodic Motion for an Imperfect Solar Sail near an Asteroid
 Periodic Motion for an Imperfect Solar Sail near an Asteroid Ariadna Farrés 1 Institute de Mathématiques de Bourgogne, Dijon 2178, France Àngel Jorba 2 Universitat de Barcelona, Barcelona 87, Spain Josep-Maria
Periodic Motion for an Imperfect Solar Sail near an Asteroid Ariadna Farrés 1 Institute de Mathématiques de Bourgogne, Dijon 2178, France Àngel Jorba 2 Universitat de Barcelona, Barcelona 87, Spain Josep-Maria
Barcelona, Spain. RTBP, collinear points, periodic orbits, homoclinic orbits. Resumen
 XX Congreso de Ecuaciones Diferenciales y Aplicaciones X Congreso de Matemática Aplicada Sevilla, 24-28 septiembre 27 (pp. 1 8) The dynamics around the collinear point L 3 of the RTBP E. Barrabés 1, J.M.
XX Congreso de Ecuaciones Diferenciales y Aplicaciones X Congreso de Matemática Aplicada Sevilla, 24-28 septiembre 27 (pp. 1 8) The dynamics around the collinear point L 3 of the RTBP E. Barrabés 1, J.M.
SOLAR SURFING THE EARTH SUN SYSTEM. Departament de Matema tica Aplicada i Ana lisi Universitat de Barcelona
 SOLAR SURFING THE EARTH SUN SYSTEM A. Farre s A. Jorba Departament de Matema tica Aplicada i Ana lisi Universitat de Barcelona IKAROS: in June 21, JAXA managed to deploy the first solar sail in space.
SOLAR SURFING THE EARTH SUN SYSTEM A. Farre s A. Jorba Departament de Matema tica Aplicada i Ana lisi Universitat de Barcelona IKAROS: in June 21, JAXA managed to deploy the first solar sail in space.
NUMERICAL STUDY OF THE GEOMETRY OF THE PHASE SPACE OF THE AUGMENTED HILL THREE-BODY PROBLEM
 This is a preprint of: Numerical study of the geometry of the phase space of the augmented ill three-body problem, Ariadna Farrés, Àngel Jorba, Josep Maria Mondelo, Celestial Mech. Dynam. Astronom., 17.
This is a preprint of: Numerical study of the geometry of the phase space of the augmented ill three-body problem, Ariadna Farrés, Àngel Jorba, Josep Maria Mondelo, Celestial Mech. Dynam. Astronom., 17.
A numerical analysis of chaos in the double pendulum
 A numerical analysis of chaos in the double pendulum Tomasz Stachowiak, Toshio Okada To cite this version: Tomasz Stachowiak, Toshio Okada. A numerical analysis of chaos in the double pendulum. Chaos,
A numerical analysis of chaos in the double pendulum Tomasz Stachowiak, Toshio Okada To cite this version: Tomasz Stachowiak, Toshio Okada. A numerical analysis of chaos in the double pendulum. Chaos,
ORBITAL DYNAMICS FOR A NON-PERFECTLY REFLECTING SOLAR SAIL CLOSE TO AN ASTEROID
 IAA-AAS-DyCoSS1-11-9 ORBITAL DYNAMICS FOR A NON-PERFECTLY REFLECTING SOLAR SAIL CLOSE TO AN ASTEROID Ariadna Farrés, Àngel Jorba, and Josep-Maria Mondelo INTRODUCTION In this paper we focus on a mission
IAA-AAS-DyCoSS1-11-9 ORBITAL DYNAMICS FOR A NON-PERFECTLY REFLECTING SOLAR SAIL CLOSE TO AN ASTEROID Ariadna Farrés, Àngel Jorba, and Josep-Maria Mondelo INTRODUCTION In this paper we focus on a mission
Quasi-periodic solutions of the 2D Euler equation
 Quasi-periodic solutions of the 2D Euler equation Nicolas Crouseilles, Erwan Faou To cite this version: Nicolas Crouseilles, Erwan Faou. Quasi-periodic solutions of the 2D Euler equation. Asymptotic Analysis,
Quasi-periodic solutions of the 2D Euler equation Nicolas Crouseilles, Erwan Faou To cite this version: Nicolas Crouseilles, Erwan Faou. Quasi-periodic solutions of the 2D Euler equation. Asymptotic Analysis,
TRANSFER TO THE COLLINEAR LIBRATION POINT L 3 IN THE SUN-EARTH+MOON SYSTEM
 TRANSFER TO THE COLLINEAR LIBRATION POINT L 3 IN THE SUN-EARTH+MOON SYSTEM HOU Xi-yun,2 TANG Jing-shi,2 LIU Lin,2. Astronomy Department, Nanjing University, Nanjing 20093, China 2. Institute of Space Environment
TRANSFER TO THE COLLINEAR LIBRATION POINT L 3 IN THE SUN-EARTH+MOON SYSTEM HOU Xi-yun,2 TANG Jing-shi,2 LIU Lin,2. Astronomy Department, Nanjing University, Nanjing 20093, China 2. Institute of Space Environment
Evolution of the L 1 halo family in the radial solar sail CRTBP
 Celestial Mechanics and Dynamical Astronomy manuscript No. (will be inserted by the editor) Evolution of the L 1 halo family in the radial solar sail CRTBP Patricia Verrier Thomas Waters Jan Sieber Received:
Celestial Mechanics and Dynamical Astronomy manuscript No. (will be inserted by the editor) Evolution of the L 1 halo family in the radial solar sail CRTBP Patricia Verrier Thomas Waters Jan Sieber Received:
A non-linear simulator written in C for orbital spacecraft rendezvous applications.
 A non-linear simulator written in C for orbital spacecraft rendezvous applications. Paulo Ricardo Arantes Gilz To cite this version: Paulo Ricardo Arantes Gilz. A non-linear simulator written in C for
A non-linear simulator written in C for orbital spacecraft rendezvous applications. Paulo Ricardo Arantes Gilz To cite this version: Paulo Ricardo Arantes Gilz. A non-linear simulator written in C for
Basins of Attraction Plasticity of a Strange Attractor with a Swirling Scroll
 Basins of Attraction Plasticity of a Strange Attractor with a Swirling Scroll Safieddine Bouali To cite this version: Safieddine Bouali. Basins of Attraction Plasticity of a Strange Attractor with a Swirling
Basins of Attraction Plasticity of a Strange Attractor with a Swirling Scroll Safieddine Bouali To cite this version: Safieddine Bouali. Basins of Attraction Plasticity of a Strange Attractor with a Swirling
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
On the longest path in a recursively partitionable graph
 On the longest path in a recursively partitionable graph Julien Bensmail To cite this version: Julien Bensmail. On the longest path in a recursively partitionable graph. 2012. HAL Id:
On the longest path in a recursively partitionable graph Julien Bensmail To cite this version: Julien Bensmail. On the longest path in a recursively partitionable graph. 2012. HAL Id:
Invariant Manifolds of Dynamical Systems and an application to Space Exploration
 Invariant Manifolds of Dynamical Systems and an application to Space Exploration Mateo Wirth January 13, 2014 1 Abstract In this paper we go over the basics of stable and unstable manifolds associated
Invariant Manifolds of Dynamical Systems and an application to Space Exploration Mateo Wirth January 13, 2014 1 Abstract In this paper we go over the basics of stable and unstable manifolds associated
Particle-in-cell simulations of high energy electron production by intense laser pulses in underdense plasmas
 Particle-in-cell simulations of high energy electron production by intense laser pulses in underdense plasmas Susumu Kato, Eisuke Miura, Mitsumori Tanimoto, Masahiro Adachi, Kazuyoshi Koyama To cite this
Particle-in-cell simulations of high energy electron production by intense laser pulses in underdense plasmas Susumu Kato, Eisuke Miura, Mitsumori Tanimoto, Masahiro Adachi, Kazuyoshi Koyama To cite this
Smart Bolometer: Toward Monolithic Bolometer with Smart Functions
 Smart Bolometer: Toward Monolithic Bolometer with Smart Functions Matthieu Denoual, Gilles Allègre, Patrick Attia, Olivier De Sagazan To cite this version: Matthieu Denoual, Gilles Allègre, Patrick Attia,
Smart Bolometer: Toward Monolithic Bolometer with Smart Functions Matthieu Denoual, Gilles Allègre, Patrick Attia, Olivier De Sagazan To cite this version: Matthieu Denoual, Gilles Allègre, Patrick Attia,
Hook lengths and shifted parts of partitions
 Hook lengths and shifted parts of partitions Guo-Niu Han To cite this version: Guo-Niu Han Hook lengths and shifted parts of partitions The Ramanujan Journal, 009, 9 p HAL Id: hal-00395690
Hook lengths and shifted parts of partitions Guo-Niu Han To cite this version: Guo-Niu Han Hook lengths and shifted parts of partitions The Ramanujan Journal, 009, 9 p HAL Id: hal-00395690
On Symmetric Norm Inequalities And Hermitian Block-Matrices
 On Symmetric Norm Inequalities And Hermitian lock-matrices Antoine Mhanna To cite this version: Antoine Mhanna On Symmetric Norm Inequalities And Hermitian lock-matrices 015 HAL Id: hal-0131860
On Symmetric Norm Inequalities And Hermitian lock-matrices Antoine Mhanna To cite this version: Antoine Mhanna On Symmetric Norm Inequalities And Hermitian lock-matrices 015 HAL Id: hal-0131860
A new simple recursive algorithm for finding prime numbers using Rosser s theorem
 A new simple recursive algorithm for finding prime numbers using Rosser s theorem Rédoane Daoudi To cite this version: Rédoane Daoudi. A new simple recursive algorithm for finding prime numbers using Rosser
A new simple recursive algorithm for finding prime numbers using Rosser s theorem Rédoane Daoudi To cite this version: Rédoane Daoudi. A new simple recursive algorithm for finding prime numbers using Rosser
We are interested in the motion of a small particle in some regions of the Earth-Moon
 NONLINEAR DYNAMICS IN AN ETENDED NEIGHBOURHOOD OF THE TRANSLUNAR EQUILIBRIUM POINT ANGEL JORBA AND JOSEP MASDEMONT Departament de Matematica Aplicada I (ETSEIB) Universitat Politecnica de Catalunya Diagonal
NONLINEAR DYNAMICS IN AN ETENDED NEIGHBOURHOOD OF THE TRANSLUNAR EQUILIBRIUM POINT ANGEL JORBA AND JOSEP MASDEMONT Departament de Matematica Aplicada I (ETSEIB) Universitat Politecnica de Catalunya Diagonal
On The Exact Solution of Newell-Whitehead-Segel Equation Using the Homotopy Perturbation Method
 On The Exact Solution of Newell-Whitehead-Segel Equation Using the Homotopy Perturbation Method S. Salman Nourazar, Mohsen Soori, Akbar Nazari-Golshan To cite this version: S. Salman Nourazar, Mohsen Soori,
On The Exact Solution of Newell-Whitehead-Segel Equation Using the Homotopy Perturbation Method S. Salman Nourazar, Mohsen Soori, Akbar Nazari-Golshan To cite this version: S. Salman Nourazar, Mohsen Soori,
Computation and Experimental Measurements of the Magnetic Fields between Filamentary Circular Coils
 Computation and Experimental Measurements of the Magnetic Fields between Filamentary Circular Coils Ao Anele, Y Hamam, L Chassagne, J Linares, Y Alayli, Karim Djouani To cite this version: Ao Anele, Y
Computation and Experimental Measurements of the Magnetic Fields between Filamentary Circular Coils Ao Anele, Y Hamam, L Chassagne, J Linares, Y Alayli, Karim Djouani To cite this version: Ao Anele, Y
A qualitative analysis of bifurcations to halo orbits
 1/28 spazio A qualitative analysis of bifurcations to halo orbits Dr. Ceccaroni Marta ceccaron@mat.uniroma2.it University of Roma Tor Vergata Work in collaboration with S. Bucciarelli, A. Celletti, G.
1/28 spazio A qualitative analysis of bifurcations to halo orbits Dr. Ceccaroni Marta ceccaron@mat.uniroma2.it University of Roma Tor Vergata Work in collaboration with S. Bucciarelli, A. Celletti, G.
FORMAL TREATMENT OF RADIATION FIELD FLUCTUATIONS IN VACUUM
 FORMAL TREATMENT OF RADIATION FIELD FLUCTUATIONS IN VACUUM Frederic Schuller, Renaud Savalle, Michael Neumann-Spallart To cite this version: Frederic Schuller, Renaud Savalle, Michael Neumann-Spallart.
FORMAL TREATMENT OF RADIATION FIELD FLUCTUATIONS IN VACUUM Frederic Schuller, Renaud Savalle, Michael Neumann-Spallart To cite this version: Frederic Schuller, Renaud Savalle, Michael Neumann-Spallart.
Linear Quadratic Zero-Sum Two-Person Differential Games
 Linear Quadratic Zero-Sum Two-Person Differential Games Pierre Bernhard To cite this version: Pierre Bernhard. Linear Quadratic Zero-Sum Two-Person Differential Games. Encyclopaedia of Systems and Control,
Linear Quadratic Zero-Sum Two-Person Differential Games Pierre Bernhard To cite this version: Pierre Bernhard. Linear Quadratic Zero-Sum Two-Person Differential Games. Encyclopaedia of Systems and Control,
I. Dynamics and phase space around the Libration Points
 Libration Point Orbits and Applications G. Gómez, M. W. Lo and J. J. Masdemont (eds.) c 23 World Scientific Publishing Company LIBRATION POINT ORBITS: A SURVEY FROM THE DYNAMICAL POINT OF VIEW G. GÓMEZ
Libration Point Orbits and Applications G. Gómez, M. W. Lo and J. J. Masdemont (eds.) c 23 World Scientific Publishing Company LIBRATION POINT ORBITS: A SURVEY FROM THE DYNAMICAL POINT OF VIEW G. GÓMEZ
Nonlocal computational methods applied to composites structures
 Nonlocal computational methods applied to composites structures Norbert Germain, Frédéric Feyel, Jacques Besson To cite this version: Norbert Germain, Frédéric Feyel, Jacques Besson. Nonlocal computational
Nonlocal computational methods applied to composites structures Norbert Germain, Frédéric Feyel, Jacques Besson To cite this version: Norbert Germain, Frédéric Feyel, Jacques Besson. Nonlocal computational
Trajectory Optimization for Differential Flat Systems
 Trajectory Optimization for Differential Flat Systems Kahina Louadj, Benjamas Panomruttanarug, Alexre Carlos Brao-Ramos, Felix Antonio Claudio Mora-Camino To cite this version: Kahina Louadj, Benjamas
Trajectory Optimization for Differential Flat Systems Kahina Louadj, Benjamas Panomruttanarug, Alexre Carlos Brao-Ramos, Felix Antonio Claudio Mora-Camino To cite this version: Kahina Louadj, Benjamas
Periodic Orbits in Rotating Second Degree and Order Gravity Fields
 Chin. J. Astron. Astrophys. Vol. 8 (28), No. 1, 18 118 (http://www.chjaa.org) Chinese Journal of Astronomy and Astrophysics Periodic Orbits in Rotating Second Degree and Order Gravity Fields Wei-Duo Hu
Chin. J. Astron. Astrophys. Vol. 8 (28), No. 1, 18 118 (http://www.chjaa.org) Chinese Journal of Astronomy and Astrophysics Periodic Orbits in Rotating Second Degree and Order Gravity Fields Wei-Duo Hu
Quasi-Periodic Orbits of the Restricted Three-Body Problem Made Easy
 Quasi-Periodic Orbits of the Restricted Three-Body Problem Made Easy Egemen Kolemen, N. Jeremy Kasdin and Pini Gurfil Mechanical and Aerospace Engineering, Princeton, NJ 08544, ekolemen@princeton.edu Mechanical
Quasi-Periodic Orbits of the Restricted Three-Body Problem Made Easy Egemen Kolemen, N. Jeremy Kasdin and Pini Gurfil Mechanical and Aerospace Engineering, Princeton, NJ 08544, ekolemen@princeton.edu Mechanical
RHEOLOGICAL INTERPRETATION OF RAYLEIGH DAMPING
 RHEOLOGICAL INTERPRETATION OF RAYLEIGH DAMPING Jean-François Semblat To cite this version: Jean-François Semblat. RHEOLOGICAL INTERPRETATION OF RAYLEIGH DAMPING. Journal of Sound and Vibration, Elsevier,
RHEOLOGICAL INTERPRETATION OF RAYLEIGH DAMPING Jean-François Semblat To cite this version: Jean-François Semblat. RHEOLOGICAL INTERPRETATION OF RAYLEIGH DAMPING. Journal of Sound and Vibration, Elsevier,
ON THE STABILITY OF APPROXIMATE DISPLACED LUNAR ORBITS
 AAS 1-181 ON THE STABILITY OF APPROXIMATE DISPLACED LUNAR ORBITS Jules Simo and Colin R. McInnes INTRODUCTION In a prior study, a methodology was developed for computing approximate large displaced orbits
AAS 1-181 ON THE STABILITY OF APPROXIMATE DISPLACED LUNAR ORBITS Jules Simo and Colin R. McInnes INTRODUCTION In a prior study, a methodology was developed for computing approximate large displaced orbits
Voltage Stability of Multiple Distributed Generators in Distribution Networks
 oltage Stability of Multiple Distributed Generators in Distribution Networks Andi Wang, Chongxin Liu, Hervé Guéguen, Zhenquan Sun To cite this version: Andi Wang, Chongxin Liu, Hervé Guéguen, Zhenquan
oltage Stability of Multiple Distributed Generators in Distribution Networks Andi Wang, Chongxin Liu, Hervé Guéguen, Zhenquan Sun To cite this version: Andi Wang, Chongxin Liu, Hervé Guéguen, Zhenquan
The sound power output of a monopole source in a cylindrical pipe containing area discontinuities
 The sound power output of a monopole source in a cylindrical pipe containing area discontinuities Wenbo Duan, Ray Kirby To cite this version: Wenbo Duan, Ray Kirby. The sound power output of a monopole
The sound power output of a monopole source in a cylindrical pipe containing area discontinuities Wenbo Duan, Ray Kirby To cite this version: Wenbo Duan, Ray Kirby. The sound power output of a monopole
Some tight polynomial-exponential lower bounds for an exponential function
 Some tight polynomial-exponential lower bounds for an exponential function Christophe Chesneau To cite this version: Christophe Chesneau. Some tight polynomial-exponential lower bounds for an exponential
Some tight polynomial-exponential lower bounds for an exponential function Christophe Chesneau To cite this version: Christophe Chesneau. Some tight polynomial-exponential lower bounds for an exponential
Im + α α. β + I 1 I 1< 0 I 1= 0 I 1 > 0
 ON THE HAMILTONIAN ANDRONOV-HOPF BIFURCATION M. Olle, J. Villanueva 2 and J. R. Pacha 3 2 3 Departament de Matematica Aplicada I (UPC), Barcelona, Spain In this contribution, we consider an specic type
ON THE HAMILTONIAN ANDRONOV-HOPF BIFURCATION M. Olle, J. Villanueva 2 and J. R. Pacha 3 2 3 Departament de Matematica Aplicada I (UPC), Barcelona, Spain In this contribution, we consider an specic type
Dispersion relation results for VCS at JLab
 Dispersion relation results for VCS at JLab G. Laveissiere To cite this version: G. Laveissiere. Dispersion relation results for VCS at JLab. Compton Scattering from Low to High Momentum Transfer, Mar
Dispersion relation results for VCS at JLab G. Laveissiere To cite this version: G. Laveissiere. Dispersion relation results for VCS at JLab. Compton Scattering from Low to High Momentum Transfer, Mar
On size, radius and minimum degree
 On size, radius and minimum degree Simon Mukwembi To cite this version: Simon Mukwembi. On size, radius and minimum degree. Discrete Mathematics and Theoretical Computer Science, DMTCS, 2014, Vol. 16 no.
On size, radius and minimum degree Simon Mukwembi To cite this version: Simon Mukwembi. On size, radius and minimum degree. Discrete Mathematics and Theoretical Computer Science, DMTCS, 2014, Vol. 16 no.
Completeness of the Tree System for Propositional Classical Logic
 Completeness of the Tree System for Propositional Classical Logic Shahid Rahman To cite this version: Shahid Rahman. Completeness of the Tree System for Propositional Classical Logic. Licence. France.
Completeness of the Tree System for Propositional Classical Logic Shahid Rahman To cite this version: Shahid Rahman. Completeness of the Tree System for Propositional Classical Logic. Licence. France.
MOTION CLOSE TO THE HOPF BIFURCATION OF THE VERTICAL FAMILY OF PERIODIC ORBITS OF L 4
 MOTION CLOSE TO THE HOPF BIFURCATION OF THE VERTICAL FAMILY OF PERIODIC ORBITS OF L 4 Mercè Ollé (1) Joan R. Pacha (2) Jordi Villanueva (3) 31st October 23 Departament de Matemàtica Aplicada I, Universitat
MOTION CLOSE TO THE HOPF BIFURCATION OF THE VERTICAL FAMILY OF PERIODIC ORBITS OF L 4 Mercè Ollé (1) Joan R. Pacha (2) Jordi Villanueva (3) 31st October 23 Departament de Matemàtica Aplicada I, Universitat
Solution to Sylvester equation associated to linear descriptor systems
 Solution to Sylvester equation associated to linear descriptor systems Mohamed Darouach To cite this version: Mohamed Darouach. Solution to Sylvester equation associated to linear descriptor systems. Systems
Solution to Sylvester equation associated to linear descriptor systems Mohamed Darouach To cite this version: Mohamed Darouach. Solution to Sylvester equation associated to linear descriptor systems. Systems
On sl3 KZ equations and W3 null-vector equations
 On sl3 KZ equations and W3 null-vector equations Sylvain Ribault To cite this version: Sylvain Ribault. On sl3 KZ equations and W3 null-vector equations. Conformal Field Theory, Integrable Models, and
On sl3 KZ equations and W3 null-vector equations Sylvain Ribault To cite this version: Sylvain Ribault. On sl3 KZ equations and W3 null-vector equations. Conformal Field Theory, Integrable Models, and
Finite volume method for nonlinear transmission problems
 Finite volume method for nonlinear transmission problems Franck Boyer, Florence Hubert To cite this version: Franck Boyer, Florence Hubert. Finite volume method for nonlinear transmission problems. Proceedings
Finite volume method for nonlinear transmission problems Franck Boyer, Florence Hubert To cite this version: Franck Boyer, Florence Hubert. Finite volume method for nonlinear transmission problems. Proceedings
A note on weak stability boundaries
 Celestial Mech Dyn Astr DOI 10.1007/s10569-006-9053-6 ORIGINAL ARTICLE A note on weak stability boundaries F. García G. Gómez Received: 13 March 2006 / Revised: 4 September 2006 / Accepted: 9 October 2006
Celestial Mech Dyn Astr DOI 10.1007/s10569-006-9053-6 ORIGINAL ARTICLE A note on weak stability boundaries F. García G. Gómez Received: 13 March 2006 / Revised: 4 September 2006 / Accepted: 9 October 2006
Exact Comparison of Quadratic Irrationals
 Exact Comparison of Quadratic Irrationals Phuc Ngo To cite this version: Phuc Ngo. Exact Comparison of Quadratic Irrationals. [Research Report] LIGM. 20. HAL Id: hal-0069762 https://hal.archives-ouvertes.fr/hal-0069762
Exact Comparison of Quadratic Irrationals Phuc Ngo To cite this version: Phuc Ngo. Exact Comparison of Quadratic Irrationals. [Research Report] LIGM. 20. HAL Id: hal-0069762 https://hal.archives-ouvertes.fr/hal-0069762
Finite element computation of leaky modes in straight and helical elastic waveguides
 Finite element computation of leaky modes in straight and helical elastic waveguides Khac-Long Nguyen, Fabien Treyssede, Christophe Hazard, Anne-Sophie Bonnet-Ben Dhia To cite this version: Khac-Long Nguyen,
Finite element computation of leaky modes in straight and helical elastic waveguides Khac-Long Nguyen, Fabien Treyssede, Christophe Hazard, Anne-Sophie Bonnet-Ben Dhia To cite this version: Khac-Long Nguyen,
A Context free language associated with interval maps
 A Context free language associated with interval maps M Archana, V Kannan To cite this version: M Archana, V Kannan. A Context free language associated with interval maps. Discrete Mathematics and Theoretical
A Context free language associated with interval maps M Archana, V Kannan To cite this version: M Archana, V Kannan. A Context free language associated with interval maps. Discrete Mathematics and Theoretical
Near-Earth Asteroids Orbit Propagation with Gaia Observations
 Near-Earth Asteroids Orbit Propagation with Gaia Observations David Bancelin, Daniel Hestroffer, William Thuillot To cite this version: David Bancelin, Daniel Hestroffer, William Thuillot. Near-Earth Asteroids
Near-Earth Asteroids Orbit Propagation with Gaia Observations David Bancelin, Daniel Hestroffer, William Thuillot To cite this version: David Bancelin, Daniel Hestroffer, William Thuillot. Near-Earth Asteroids
Methylation-associated PHOX2B gene silencing is a rare event in human neuroblastoma.
 Methylation-associated PHOX2B gene silencing is a rare event in human neuroblastoma. Loïc De Pontual, Delphine Trochet, Franck Bourdeaut, Sophie Thomas, Heather Etchevers, Agnes Chompret, Véronique Minard,
Methylation-associated PHOX2B gene silencing is a rare event in human neuroblastoma. Loïc De Pontual, Delphine Trochet, Franck Bourdeaut, Sophie Thomas, Heather Etchevers, Agnes Chompret, Véronique Minard,
Low frequency resolvent estimates for long range perturbations of the Euclidean Laplacian
 Low frequency resolvent estimates for long range perturbations of the Euclidean Laplacian Jean-Francois Bony, Dietrich Häfner To cite this version: Jean-Francois Bony, Dietrich Häfner. Low frequency resolvent
Low frequency resolvent estimates for long range perturbations of the Euclidean Laplacian Jean-Francois Bony, Dietrich Häfner To cite this version: Jean-Francois Bony, Dietrich Häfner. Low frequency resolvent
Case report on the article Water nanoelectrolysis: A simple model, Journal of Applied Physics (2017) 122,
 122,") Case report on the article Water nanoelectrolysis: A simple model, Journal of Applied Physics (2017) 122, 244902 Juan Olives, Zoubida Hammadi, Roger Morin, Laurent Lapena To cite this version: Juan Olives,
Case report on the article Water nanoelectrolysis: A simple model, Journal of Applied Physics (2017) 122, 244902 Juan Olives, Zoubida Hammadi, Roger Morin, Laurent Lapena To cite this version: Juan Olives,
On Newton-Raphson iteration for multiplicative inverses modulo prime powers
 On Newton-Raphson iteration for multiplicative inverses modulo prime powers Jean-Guillaume Dumas To cite this version: Jean-Guillaume Dumas. On Newton-Raphson iteration for multiplicative inverses modulo
On Newton-Raphson iteration for multiplicative inverses modulo prime powers Jean-Guillaume Dumas To cite this version: Jean-Guillaume Dumas. On Newton-Raphson iteration for multiplicative inverses modulo
Stable and unstable orbits around Mercury
 Stable and unstable orbits around Mercury Zoltán Makó, Ferenc Szenkovits, Júlia Salamon, Robert Oláh-Gál To cite this version: Zoltán Makó, Ferenc Szenkovits, Júlia Salamon, Robert Oláh-Gál. Stable and
Stable and unstable orbits around Mercury Zoltán Makó, Ferenc Szenkovits, Júlia Salamon, Robert Oláh-Gál To cite this version: Zoltán Makó, Ferenc Szenkovits, Júlia Salamon, Robert Oláh-Gál. Stable and
On the Earth s magnetic field and the Hall effect
 On the Earth s magnetic field and the Hall effect J. E. Allen To cite this version: J. E. Allen. On the Earth s magnetic field and the Hall effect. Nonlinear rocesses in Geophysics, European Geosciences
On the Earth s magnetic field and the Hall effect J. E. Allen To cite this version: J. E. Allen. On the Earth s magnetic field and the Hall effect. Nonlinear rocesses in Geophysics, European Geosciences
ON THE UNIQUENESS IN THE 3D NAVIER-STOKES EQUATIONS
 ON THE UNIQUENESS IN THE 3D NAVIER-STOKES EQUATIONS Abdelhafid Younsi To cite this version: Abdelhafid Younsi. ON THE UNIQUENESS IN THE 3D NAVIER-STOKES EQUATIONS. 4 pages. 212. HAL Id:
ON THE UNIQUENESS IN THE 3D NAVIER-STOKES EQUATIONS Abdelhafid Younsi To cite this version: Abdelhafid Younsi. ON THE UNIQUENESS IN THE 3D NAVIER-STOKES EQUATIONS. 4 pages. 212. HAL Id:
The 3D restricted three-body problem under angular velocity variation. K. E. Papadakis
 A&A 425, 11 1142 (2004) DOI: 10.1051/0004-661:20041216 c ESO 2004 Astronomy & Astrophysics The D restricted three-body problem under angular velocity variation K. E. Papadakis Department of Engineering
A&A 425, 11 1142 (2004) DOI: 10.1051/0004-661:20041216 c ESO 2004 Astronomy & Astrophysics The D restricted three-body problem under angular velocity variation K. E. Papadakis Department of Engineering
Comments on the method of harmonic balance
 Comments on the method of harmonic balance Ronald Mickens To cite this version: Ronald Mickens. Comments on the method of harmonic balance. Journal of Sound and Vibration, Elsevier, 1984, 94 (3), pp.456-460.
Comments on the method of harmonic balance Ronald Mickens To cite this version: Ronald Mickens. Comments on the method of harmonic balance. Journal of Sound and Vibration, Elsevier, 1984, 94 (3), pp.456-460.
Easter bracelets for years
 Easter bracelets for 5700000 years Denis Roegel To cite this version: Denis Roegel. Easter bracelets for 5700000 years. [Research Report] 2014. HAL Id: hal-01009457 https://hal.inria.fr/hal-01009457
Easter bracelets for 5700000 years Denis Roegel To cite this version: Denis Roegel. Easter bracelets for 5700000 years. [Research Report] 2014. HAL Id: hal-01009457 https://hal.inria.fr/hal-01009457
NUMERICAL METHODS TO GENERATE SOLAR SAIL TRAJECTORIES
 NUMERICAL METHODS TO GENERATE SOLAR SAIL TRAJECTORIES Geoffrey G. Wawrzyniak and Kathleen C. Howell Purdue University, West Lafayette, Indiana gwawrzyn@purdue.edu ABSTRACT Solar sail trajectory design
NUMERICAL METHODS TO GENERATE SOLAR SAIL TRAJECTORIES Geoffrey G. Wawrzyniak and Kathleen C. Howell Purdue University, West Lafayette, Indiana gwawrzyn@purdue.edu ABSTRACT Solar sail trajectory design
Beat phenomenon at the arrival of a guided mode in a semi-infinite acoustic duct
 Beat phenomenon at the arrival of a guided mode in a semi-infinite acoustic duct Philippe GATIGNOL, Michel Bruneau, Patrick LANCELEUR, Catherine Potel To cite this version: Philippe GATIGNOL, Michel Bruneau,
Beat phenomenon at the arrival of a guided mode in a semi-infinite acoustic duct Philippe GATIGNOL, Michel Bruneau, Patrick LANCELEUR, Catherine Potel To cite this version: Philippe GATIGNOL, Michel Bruneau,
AVERAGING AND RECONSTRUCTION IN HAMILTONIAN SYSTEMS
 AVERAGING AND RECONSTRUCTION IN HAMILTONIAN SYSTEMS Kenneth R. Meyer 1 Jesús F. Palacián 2 Patricia Yanguas 2 1 Department of Mathematical Sciences University of Cincinnati, Cincinnati, Ohio (USA) 2 Departamento
AVERAGING AND RECONSTRUCTION IN HAMILTONIAN SYSTEMS Kenneth R. Meyer 1 Jesús F. Palacián 2 Patricia Yanguas 2 1 Department of Mathematical Sciences University of Cincinnati, Cincinnati, Ohio (USA) 2 Departamento
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
SOLAR RADIATION ESTIMATION AND PREDICTION USING MEASURED AND PREDICTED AEROSOL OPTICAL DEPTH
 SOLAR RADIATION ESTIMATION AND PREDICTION USING MEASURED AND PREDICTED AEROSOL OPTICAL DEPTH Carlos M. Fernández-Peruchena, Martín Gastón, Maria V Guisado, Ana Bernardos, Íñigo Pagola, Lourdes Ramírez
SOLAR RADIATION ESTIMATION AND PREDICTION USING MEASURED AND PREDICTED AEROSOL OPTICAL DEPTH Carlos M. Fernández-Peruchena, Martín Gastón, Maria V Guisado, Ana Bernardos, Íñigo Pagola, Lourdes Ramírez
Thermodynamic form of the equation of motion for perfect fluids of grade n
 Thermodynamic form of the equation of motion for perfect fluids of grade n Henri Gouin To cite this version: Henri Gouin. Thermodynamic form of the equation of motion for perfect fluids of grade n. Comptes
Thermodynamic form of the equation of motion for perfect fluids of grade n Henri Gouin To cite this version: Henri Gouin. Thermodynamic form of the equation of motion for perfect fluids of grade n. Comptes
Entropies and fractal dimensions
 Entropies and fractal dimensions Amelia Carolina Sparavigna To cite this version: Amelia Carolina Sparavigna. Entropies and fractal dimensions. Philica, Philica, 2016. HAL Id: hal-01377975
Entropies and fractal dimensions Amelia Carolina Sparavigna To cite this version: Amelia Carolina Sparavigna. Entropies and fractal dimensions. Philica, Philica, 2016. HAL Id: hal-01377975
INTERPLANETARY AND LUNAR TRANSFERS USING LIBRATION POINTS
 INTERPLANETARY AND LUNAR TRANSFERS USING LIBRATION POINTS Francesco Topputo (), Massimiliano Vasile () and Franco Bernelli-Zazzera () () Dipartimento di Ingegneria Aerospaziale, Politecnico di Milano,
INTERPLANETARY AND LUNAR TRANSFERS USING LIBRATION POINTS Francesco Topputo (), Massimiliano Vasile () and Franco Bernelli-Zazzera () () Dipartimento di Ingegneria Aerospaziale, Politecnico di Milano,
Diurnal variation of tropospheric temperature at a tropical station
 Diurnal variation of tropospheric temperature at a tropical station K. Revathy, S. R. Prabhakaran Nayar, B. V. Krishna Murthy To cite this version: K. Revathy, S. R. Prabhakaran Nayar, B. V. Krishna Murthy.
Diurnal variation of tropospheric temperature at a tropical station K. Revathy, S. R. Prabhakaran Nayar, B. V. Krishna Murthy To cite this version: K. Revathy, S. R. Prabhakaran Nayar, B. V. Krishna Murthy.
Nel s category theory based differential and integral Calculus, or Did Newton know category theory?
 Nel s category theory based differential and integral Calculus, or Did Newton know category theory? Elemer Elad Rosinger To cite this version: Elemer Elad Rosinger. Nel s category theory based differential
Nel s category theory based differential and integral Calculus, or Did Newton know category theory? Elemer Elad Rosinger To cite this version: Elemer Elad Rosinger. Nel s category theory based differential
Nodal and divergence-conforming boundary-element methods applied to electromagnetic scattering problems
 Nodal and divergence-conforming boundary-element methods applied to electromagnetic scattering problems M. Afonso, Joao Vasconcelos, Renato Mesquita, Christian Vollaire, Laurent Nicolas To cite this version:
Nodal and divergence-conforming boundary-element methods applied to electromagnetic scattering problems M. Afonso, Joao Vasconcelos, Renato Mesquita, Christian Vollaire, Laurent Nicolas To cite this version:
Antipodal radiation pattern of a patch antenna combined with superstrate using transformation electromagnetics
 Antipodal radiation pattern of a patch antenna combined with superstrate using transformation electromagnetics Mark Clemente Arenas, Anne-Claire Lepage, Xavier Begaud To cite this version: Mark Clemente
Antipodal radiation pattern of a patch antenna combined with superstrate using transformation electromagnetics Mark Clemente Arenas, Anne-Claire Lepage, Xavier Begaud To cite this version: Mark Clemente
On Symmetric Norm Inequalities And Hermitian Block-Matrices
 On Symmetric Norm Inequalities And Hermitian lock-matrices Antoine Mhanna To cite this version: Antoine Mhanna On Symmetric Norm Inequalities And Hermitian lock-matrices 016 HAL Id: hal-0131860
On Symmetric Norm Inequalities And Hermitian lock-matrices Antoine Mhanna To cite this version: Antoine Mhanna On Symmetric Norm Inequalities And Hermitian lock-matrices 016 HAL Id: hal-0131860
Bifurcations thresholds of halo orbits
 10 th AstroNet-II Final Meeting, 15 th -19 th June 2015, Tossa Del Mar 1/23 spazio Bifurcations thresholds of halo orbits Dr. Ceccaroni Marta ceccaron@mat.uniroma2.it University of Roma Tor Vergata Work
10 th AstroNet-II Final Meeting, 15 th -19 th June 2015, Tossa Del Mar 1/23 spazio Bifurcations thresholds of halo orbits Dr. Ceccaroni Marta ceccaron@mat.uniroma2.it University of Roma Tor Vergata Work
Analysis of frozen orbits for solar sails
 Trabalho apresentado no XXXV CNMAC, Natal-RN, 2014. Analysis of frozen orbits for solar sails J. P. S. Carvalho, R. Vilhena de Moraes, Instituto de Ciência e Tecnologia, UNIFESP, São José dos Campos -
Trabalho apresentado no XXXV CNMAC, Natal-RN, 2014. Analysis of frozen orbits for solar sails J. P. S. Carvalho, R. Vilhena de Moraes, Instituto de Ciência e Tecnologia, UNIFESP, São José dos Campos -
Analysis of Boyer and Moore s MJRTY algorithm
 Analysis of Boyer and Moore s MJRTY algorithm Laurent Alonso, Edward M. Reingold To cite this version: Laurent Alonso, Edward M. Reingold. Analysis of Boyer and Moore s MJRTY algorithm. Information Processing
Analysis of Boyer and Moore s MJRTY algorithm Laurent Alonso, Edward M. Reingold To cite this version: Laurent Alonso, Edward M. Reingold. Analysis of Boyer and Moore s MJRTY algorithm. Information Processing
HIGH RESOLUTION ION KINETIC ENERGY ANALYSIS OF FIELD EMITTED IONS
 HIGH RESOLUTION ION KINETIC ENERGY ANALYSIS OF FIELD EMITTED IONS J. Liu, T. Tsong To cite this version: J. Liu, T. Tsong. HIGH RESOLUTION ION KINETIC ENERGY ANALYSIS OF FIELD EMITTED IONS. Journal de
HIGH RESOLUTION ION KINETIC ENERGY ANALYSIS OF FIELD EMITTED IONS J. Liu, T. Tsong To cite this version: J. Liu, T. Tsong. HIGH RESOLUTION ION KINETIC ENERGY ANALYSIS OF FIELD EMITTED IONS. Journal de
A note on the acyclic 3-choosability of some planar graphs
 A note on the acyclic 3-choosability of some planar graphs Hervé Hocquard, Mickael Montassier, André Raspaud To cite this version: Hervé Hocquard, Mickael Montassier, André Raspaud. A note on the acyclic
A note on the acyclic 3-choosability of some planar graphs Hervé Hocquard, Mickael Montassier, André Raspaud To cite this version: Hervé Hocquard, Mickael Montassier, André Raspaud. A note on the acyclic
The influence of the global atmospheric properties on the detection of UHECR by EUSO on board of the ISS
 The influence of the global atmospheric properties on the detection of UHECR by EUSO on board of the ISS C. Berat, D. Lebrun, A. Stutz, E. Plagnol To cite this version: C. Berat, D. Lebrun, A. Stutz, E.
The influence of the global atmospheric properties on the detection of UHECR by EUSO on board of the ISS C. Berat, D. Lebrun, A. Stutz, E. Plagnol To cite this version: C. Berat, D. Lebrun, A. Stutz, E.
SPACECRAFT DYNAMICS NEAR A BINARY ASTEROID. F. Gabern, W.S. Koon and J.E. Marsden
 PROCEEDINGS OF THE FIFTH INTERNATIONAL CONFERENCE ON DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS June 16 19, 2004, Pomona, CA, USA pp. 1 10 SPACECRAFT DYNAMICS NEAR A BINARY ASTEROID F. Gabern, W.S. Koon
PROCEEDINGS OF THE FIFTH INTERNATIONAL CONFERENCE ON DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS June 16 19, 2004, Pomona, CA, USA pp. 1 10 SPACECRAFT DYNAMICS NEAR A BINARY ASTEROID F. Gabern, W.S. Koon
b-chromatic number of cacti
 b-chromatic number of cacti Victor Campos, Claudia Linhares Sales, Frédéric Maffray, Ana Silva To cite this version: Victor Campos, Claudia Linhares Sales, Frédéric Maffray, Ana Silva. b-chromatic number
b-chromatic number of cacti Victor Campos, Claudia Linhares Sales, Frédéric Maffray, Ana Silva To cite this version: Victor Campos, Claudia Linhares Sales, Frédéric Maffray, Ana Silva. b-chromatic number
New estimates for the div-curl-grad operators and elliptic problems with L1-data in the half-space
 New estimates for the div-curl-grad operators and elliptic problems with L1-data in the half-space Chérif Amrouche, Huy Hoang Nguyen To cite this version: Chérif Amrouche, Huy Hoang Nguyen. New estimates
New estimates for the div-curl-grad operators and elliptic problems with L1-data in the half-space Chérif Amrouche, Huy Hoang Nguyen To cite this version: Chérif Amrouche, Huy Hoang Nguyen. New estimates
On Solving Aircraft Conflict Avoidance Using Deterministic Global Optimization (sbb) Codes
 Codes") On Solving Aircraft Conflict Avoidance Using Deterministic Global Optimization (sbb) Codes Sonia Cafieri, Frédéric Messine, Ahmed Touhami To cite this version: Sonia Cafieri, Frédéric Messine, Ahmed Touhami.
On Solving Aircraft Conflict Avoidance Using Deterministic Global Optimization (sbb) Codes Sonia Cafieri, Frédéric Messine, Ahmed Touhami To cite this version: Sonia Cafieri, Frédéric Messine, Ahmed Touhami.
On measurement of mechanical properties of sound absorbing materials
 On measurement of mechanical properties of sound absorbing materials Nicolas Dauchez, Manuel Etchessahar, Sohbi Sahraoui To cite this version: Nicolas Dauchez, Manuel Etchessahar, Sohbi Sahraoui. On measurement
On measurement of mechanical properties of sound absorbing materials Nicolas Dauchez, Manuel Etchessahar, Sohbi Sahraoui To cite this version: Nicolas Dauchez, Manuel Etchessahar, Sohbi Sahraoui. On measurement
All Associated Stirling Numbers are Arithmetical Triangles
 All Associated Stirling Numbers are Arithmetical Triangles Khaled Ben Letaïef To cite this version: Khaled Ben Letaïef. All Associated Stirling Numbers are Arithmetical Triangles. 2017.
All Associated Stirling Numbers are Arithmetical Triangles Khaled Ben Letaïef To cite this version: Khaled Ben Letaïef. All Associated Stirling Numbers are Arithmetical Triangles. 2017.
Quantum efficiency and metastable lifetime measurements in ruby ( Cr 3+ : Al2O3) via lock-in rate-window photothermal radiometry
 via lock-in rate-window photothermal radiometry") Quantum efficiency and metastable lifetime measurements in ruby ( Cr 3+ : Al2O3) via lock-in rate-window photothermal radiometry A. Mandelis, Z. Chen, R. Bleiss To cite this version: A. Mandelis, Z. Chen,
Quantum efficiency and metastable lifetime measurements in ruby ( Cr 3+ : Al2O3) via lock-in rate-window photothermal radiometry A. Mandelis, Z. Chen, R. Bleiss To cite this version: A. Mandelis, Z. Chen,
1. (i) Determine how many periodic orbits and equilibria can be born at the bifurcations of the zero equilibrium of the following system:
 Determine how many periodic orbits and equilibria can be born at the bifurcations of the zero equilibrium of the following system:") 1. (i) Determine how many periodic orbits and equilibria can be born at the bifurcations of the zero equilibrium of the following system: ẋ = y x 2, ẏ = z + xy, ż = y z + x 2 xy + y 2 + z 2 x 4. (ii) Determine
1. (i) Determine how many periodic orbits and equilibria can be born at the bifurcations of the zero equilibrium of the following system: ẋ = y x 2, ẏ = z + xy, ż = y z + x 2 xy + y 2 + z 2 x 4. (ii) Determine
Gaia astrometric accuracy in the past
 Gaia astrometric accuracy in the past François Mignard To cite this version: François Mignard. Gaia astrometric accuracy in the past. IMCCE. International Workshop NAROO-GAIA A new reduction of old observations
Gaia astrometric accuracy in the past François Mignard To cite this version: François Mignard. Gaia astrometric accuracy in the past. IMCCE. International Workshop NAROO-GAIA A new reduction of old observations
Influence of a Rough Thin Layer on the Potential
 Influence of a Rough Thin Layer on the Potential Ionel Ciuperca, Ronan Perrussel, Clair Poignard To cite this version: Ionel Ciuperca, Ronan Perrussel, Clair Poignard. Influence of a Rough Thin Layer on
Influence of a Rough Thin Layer on the Potential Ionel Ciuperca, Ronan Perrussel, Clair Poignard To cite this version: Ionel Ciuperca, Ronan Perrussel, Clair Poignard. Influence of a Rough Thin Layer on
Cutwidth and degeneracy of graphs
 Cutwidth and degeneracy of graphs Benoit Kloeckner To cite this version: Benoit Kloeckner. Cutwidth and degeneracy of graphs. IF_PREPUB. 2009. HAL Id: hal-00408210 https://hal.archives-ouvertes.fr/hal-00408210v1
Cutwidth and degeneracy of graphs Benoit Kloeckner To cite this version: Benoit Kloeckner. Cutwidth and degeneracy of graphs. IF_PREPUB. 2009. HAL Id: hal-00408210 https://hal.archives-ouvertes.fr/hal-00408210v1
Palindromic Discontinuous Galerkin Method
 Palindromic Discontinuous Galerkin Method David Coulette, Emmanuel Franck, Philippe Helluy, Michel Mehrenberger, Laurent Navoret To cite this version: David Coulette, Emmanuel Franck, Philippe Helluy,
Palindromic Discontinuous Galerkin Method David Coulette, Emmanuel Franck, Philippe Helluy, Michel Mehrenberger, Laurent Navoret To cite this version: David Coulette, Emmanuel Franck, Philippe Helluy,
Impedance Transmission Conditions for the Electric Potential across a Highly Conductive Casing
 Impedance Transmission Conditions for the Electric Potential across a Highly Conductive Casing Hélène Barucq, Aralar Erdozain, David Pardo, Victor Péron To cite this version: Hélène Barucq, Aralar Erdozain,
Impedance Transmission Conditions for the Electric Potential across a Highly Conductive Casing Hélène Barucq, Aralar Erdozain, David Pardo, Victor Péron To cite this version: Hélène Barucq, Aralar Erdozain,
Some explanations about the IWLS algorithm to fit generalized linear models
 Some explanations about the IWLS algorithm to fit generalized linear models Christophe Dutang To cite this version: Christophe Dutang. Some explanations about the IWLS algorithm to fit generalized linear
Some explanations about the IWLS algorithm to fit generalized linear models Christophe Dutang To cite this version: Christophe Dutang. Some explanations about the IWLS algorithm to fit generalized linear
New Basis Points of Geodetic Stations for Landslide Monitoring
 New Basis Points of Geodetic Stations for Landslide Monitoring V Riabchii, M Tregub, Yankin To cite this version: V Riabchii, M Tregub, Yankin. New Basis Points of Geodetic Stations for Landslide Monitoring.
New Basis Points of Geodetic Stations for Landslide Monitoring V Riabchii, M Tregub, Yankin To cite this version: V Riabchii, M Tregub, Yankin. New Basis Points of Geodetic Stations for Landslide Monitoring.
The Riemann Hypothesis Proof And The Quadrivium Theory
 The Riemann Hypothesis Proof And The Quadrivium Theory Thierno M. Sow To cite this version: Thierno M. Sow. The Riemann Hypothesis Proof And The Quadrivium Theory. 2017. HAL Id: hal-01513658 https://hal.archives-ouvertes.fr/hal-01513658
The Riemann Hypothesis Proof And The Quadrivium Theory Thierno M. Sow To cite this version: Thierno M. Sow. The Riemann Hypothesis Proof And The Quadrivium Theory. 2017. HAL Id: hal-01513658 https://hal.archives-ouvertes.fr/hal-01513658
GENERALIZED OPTICAL BISTABILITY AND CHAOS IN A LASER WITH A SATURABLE ABSORBER
 GENERALIZED OPTICAL BISTABILITY AND CHAOS IN A LASER WITH A SATURABLE ABSORBER E. Arimondo, F. De Tomasi, B. Zambon, F. Papoff, D. Hennequin To cite this version: E. Arimondo, F. De Tomasi, B. Zambon,
GENERALIZED OPTICAL BISTABILITY AND CHAOS IN A LASER WITH A SATURABLE ABSORBER E. Arimondo, F. De Tomasi, B. Zambon, F. Papoff, D. Hennequin To cite this version: E. Arimondo, F. De Tomasi, B. Zambon,
Visible laser emission of Pr3+ in various hosts
 Visible laser emission of Pr3+ in various hosts M. Malinowski, M. Joubert, R. Mahiou, B. Jacquier To cite this version: M. Malinowski, M. Joubert, R. Mahiou, B. Jacquier. Visible laser emission of Pr3+
Visible laser emission of Pr3+ in various hosts M. Malinowski, M. Joubert, R. Mahiou, B. Jacquier To cite this version: M. Malinowski, M. Joubert, R. Mahiou, B. Jacquier. Visible laser emission of Pr3+