Directional Field. Xiao-Ming Fu
|
|
|
- Osborne Bell
- 5 years ago
- Views:
Transcription
1 Directional Field Xiao-Ming Fu
2 Outlines Introduction Discretization Representation Objectives and Constraints
3 Outlines Introduction Discretization Representation Objectives and Constraints
4 Definition Spatially-varying directional information, assigned to each point on a given domain. A field on a domain is the assignment of a directional to each point in the domain. Magnitude + direction 1. Direction 2. Length
5 Multi-valued field Multiple directions per point with some notion of symmetry A set of directions or vectors at every point. Rotationally-symmetric direction fields (RoSy fields) N = 1, 2, 4, 6 Four directions with π/2 RoSy Two independent pairs of directions with π RoSy within each pair.
6 Vector fields, direction fields, line fields, cross fields, frame fields, RoSy fields, N-symmetry fields, PolyVector fields, tensor fields
7 Some concrete examples Principal directions of a shape Stress or strain tensors The gradient of a scalar field The advection field of a flow Diffusion data from MRI

8 Synthesis or design User constraints Alignment conditions Fairness objectives Physical realizations

9 Applications Mesh Generation
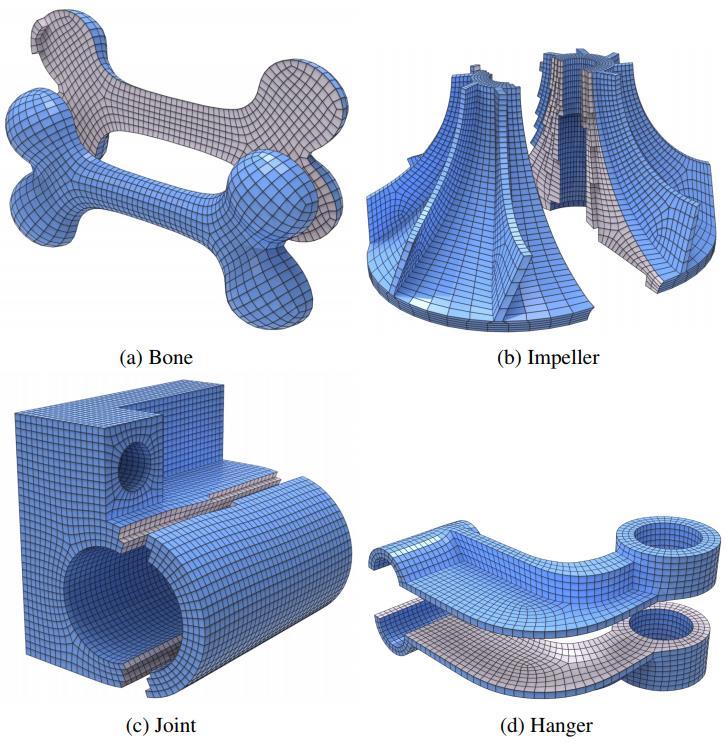
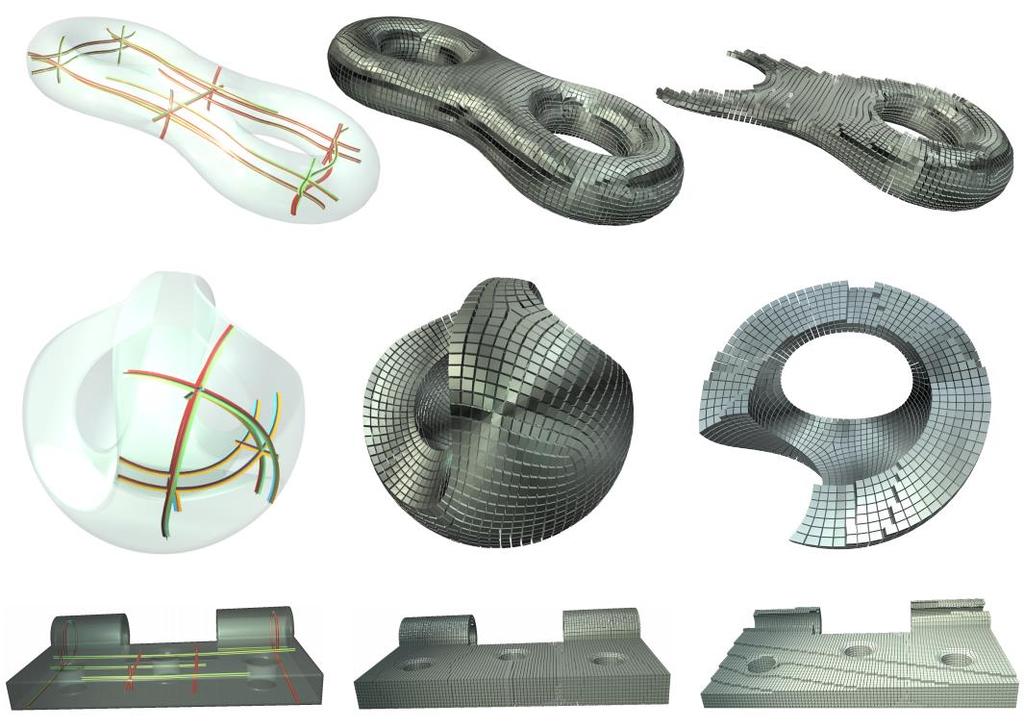
10 Applications All-hex meshing

11 Deformation Deformations which are as isometric as possible can be generated using approximate Killing vector fields.

12 Texture Mapping and Synthesis Seamless texture

13 Architectural Geometry Conjugate directions

14 Architectural Geometry Self-Supporting Structures
15 Outlines Introduction Discretization Representation Objectives and Constraints
16 Tangent Spaces The tangent spaces of the a triangle mesh can be located on the faces, edges, or vertices of a triangle mesh. One way to construct a tangent space at a point is to assign a surface normal vector to the point. Face: normal vector Vertex and edge: local average of the adjacent triangle normal vectors Local coordinate system Two orthogonal tangent vectors
17 Discrete Connections Given two adjacent tangent spaces i and j, we need a notion of connection between them in order to compare two directional objects that are defined on them. A straightforward discretization of the Levi- Civita connection is made by flattening the two adjacent tangent planes. X ij : angle difference between corresponding axes
18 Vector Field Topology continuous A vector field has a singularity at a point p if it vanishes or is not defined at this point. 2D case: Parameterized curve: c: 0,1 R 2 A smooth angle function: α: 0,1 R Vector field: cos(α(t)) v c t = v c t sin(α(t)) Define the index of the singularity at p: index p = 1 (α 1 α(0)) 2π Note: Since α is smooth, the difference α(1) α(0) is unique and it is a multiple of 2π.

19 Singularity index p = 1 2π (α 1 α(0)) The index measures the number of times the vectors along the curve c rotate counterclockwise, while traversing the curve once. It is common to consider only points p with index index p 0 as singular. It vanishes or is not defined at this point. Singularity
20 Singularity The definition does not directly extend to surfaces, because there is no global coordinate system (the tangent bundle is not trivial). Calculate the index at a point p of a vector field v on a surface M by using an arbitrary chart around p. A chart for a topological space M (also called a coordinate chart, coordinate patch, coordinate map, or local frame) is a homeomorphism from an open subset of M to an open subset of a Euclidean space.

21 Singularity Poincaré Hopf theorem The sum of all the indices of a vector field equals 2 2g. Some example

22 Discrete Field Topology Piecewise constant face-based 1- direction field Constant on face Discontinuous on edges Extension from continuous setting Define rotation between adjacent triangles to define angle difference It is intuitive to assume that the field undergoes a rotation δ ij = π 4 clockwise. δ ij = π + 2πk would be a valid assumption. 4
23 Rotation Principal rotation δ ij [ π, π) Summarize all rotation angles on edges that are incident to the vertex index p = 1 2π δ ij

24 Period Jumps non-principal rotation: δ ij + 2πk k full period rotations The values of k are denoted as period jumps. k = 0 k = 1
25 Matching - multi-valued field N > 1 directionals per tangent space An additional degree of freedom: The correspondence between the individual directionals in tangent space i to those in the adjacent tangent space j. A matching between two N-sets of directional is a bijective map f between them (or their indices). It preserves order: f u r f u r+1 = v s+1 = v s
26 Effort Based on a matching f, the notions of rotation and principal rotation can be generalized to multi-valued fields. δ r ij : rotation between u r and f u r Effort of the matching f: Y ij = N r=1 Symmetric N-directional field δ ij = δ r ij for every r δ ij r The efforts of different (order-preserving) matchings differ by 2π.
27 Outlines Introduction Discretization Representation Objectives and Constraints

28 Angle-Based Local thonormal frame {e 1, e 2 } on each tangent space 1-direction (unit vector) fields can be concisely described within each tangent space by a signed angle φ that is relative to e 1. Rotation angle: δ ij = φ j (φ i + X ij + 2πk ij ) X ij : the change of bases e between the flattened tangent spaces i and j k ij : period jump δ ij
29 Angle-Based N symmetry directions A single φ representing the set of N symmetry directions. {φ + l 2π/N l {0,, N 1}} Period jump to be an integer multiple of 1 N. Rotation angle: δ ij = φ j (φ i + X ij + 2π N k ij)
30 Pros and cons Advantage Directions, as well as possible period jumps, are represented explicitly. A linear expression of the rotation angle. Disadvantage The use of integer variables, which leads to discrete optimization problems.
31 Cartesian and Complex A vector v in a two-dimensional tangent space can be represented using Cartesian coordinates (from R 2 ) in the local coordinate system {e1, e2}, or equivalently as complex numbers (from C). Connection to angle-based representation cos φ v = sin φ = eiφ The change of bases from one tangent space to another cos X ij sin X ij or e sin X ij cos X ix ij ij
32 N-directional fields By multiplying the argument of the trigonometric functions, or taking the complex exponential to the power of N v N cos Nφ = sin Nφ = einφ e inφ l = e inφ φ l = φ + l 2π, l {0,, N 1} N v N becomes a 1-directional field. X ij becomes NX ij : cos NX ij sin NX ij or e sin NX ij cos NX inx ij ij
33 Complex Polynomials Analogously, every N-vector set {u 1, u N }, in the complex form u i C, can be uniquely identified as the roots of a complex polynomial p(z) = (z u 1 ) (z u N ). Writing p in monomial form, p(z) = i c n z n, the coefficient set {c n } is thus an order-invariant representative of a 1 N vector. N-PolyVector A generation of former representation.
34 Comparison Comparing between PolyVectors on adjacent tangent spaces amounts to comparing polynomial coefficient. Every coefficient c n contains multiplications of N n roots.
35 Tensors Real-valued 2 2 matrices in local coordinates T = T 11 T 12 T 21 T 22 Symmetric Tensors an eigen-decomposition T = UΛU T Λ = diag λ 1, λ 2, two real eigenvalues U = u 1, u 2, two (orthogonal) eigenvectors with u i = 1 Since eigenvectors are only determined up to sign, a rank-2 tensor field can in fact be interpreted as two orthogonal 2-direction fields ± u i.
36 Outlines Introduction Discretization Representation Objectives and Constraints
37

38 Objectives & Constraints Different applications have different requirements. various objectives can be used for vector field optimization
39 Objectives Fairness measuring how variable, or rather, non-similar, the field is between adjacent tangent spaces. Parallelity Orthogonality Minimization of curl
40 Parallelity as-parallel-as-possible Parallel The direction in one tangent space is obtained via parallel transport from the directions in adjacent tangent spaces. As-parallel-as-possible goal: E fair N = N 2 e w e δ e 2

41 An example of cross field E fair 4 = 4 2 e w e φ j (φ i + X ij + 2π N k ij) 2 Variables: φ i and k ij (integers) Greedy solver: 1. Treat k ij as floating number, minimize E fair 4 2. Round the variable which causes the smallest absolute error if we round it to the nearest integer. 3. Repeat above two steps.
42 Constraints Alignment fit certain prescribed directions principal curvature strokes given by an artist on the surface boundary curves feature lines Soft data term Least square Hard constraint

43 Constraints Alignment fit certain prescribed directions principal curvature strokes given by an artist on the surface boundary curves feature lines Soft data term Least square Hard constraint

44 Constraints Symmetry: If the surface has bilateral symmetry, it is advantageous if the designed directional fields adhere to the same symmetry, allowing field-guided applications to preserve the symmetry as well.
45 Constraints Surface mapping: Given multiple shapes with a correspondence between them, we could require that the directional fields commute with the correspondence, effectively designing directional fields jointly on multiple shapes.

46 Constraints Surface mapping: Given multiple shapes with a correspondence between them, we could require that the directional fields commute with the correspondence, effectively designing directional fields jointly on multiple shapes.
47 Integrable field In most of these applications, vector fields are computed to serve as a guiding basis for the construction of global parameterizations. Parameterization coordinates: Defined on vertices Two scalar variables Gradients of parameterization coordinates are two separate vector fields. Integrable Curl-free

48 Integrable field Thinking from a opposite way: If the vector fields are curl-free, it can be integrated to be parameterization coordinates. Minimize the difference between the tangent field and the gradient of the function in the leastsquares sense. Thus, if the curl-free field is foldover-free and with low distortion, the parameterization is also foldover-free and with low distortion.
49 Integrability Scalar function h: M R h f, e = h g, e It trivially follows that h f, e h g, e is zero for any function h. f e g Discrete curl for any vector field α: α f, e α g, e α is curl-free if and only if α f, e = α g, e.

50 Vector field design J = u x v x u y v y, α = u x, u y, β = ( v x, v y ) Objective: Fairness Constraints: Curl-free Foldover-free Low distortion

51 Poisson integration min h f h f α f 2 2
52 Extension Another question: Given a cross field, how to modify it to be curl-free? Paper: Computing inversion-free mappings by simplex assembly E = E C + λe field E field = α f, e α g, e 2 + β f, e β g, e 2 e E C : distortion energy Increase λ to make E field approach zero
53 Properties of resulting field Non-Orthogonal Different lengths β α Frame field

54 Frame Fields Isotropic Anisotropic
55 Frame Fields Cross filed (4-RoSy field) X = u, u, u, u Frame field (2 2 vector field) F = v, w, v, w Canonical decomposition F = WX (polar decomposition) W: symmetric positive definite matrix
56 Paper: Frame Fields: Anisotropic and Non- Orthogonal Cross Fields A frame field is said to be continuous/smooth if both X and W are continuous/smooth. Synthesis of frame field: Separately design X and W X: formerly method, e.g., E fair 4 = 4 2 W: Laplacian smoothing, guarantee that the resulting W are SPD. e w e φ j (φ i + X ij + 2π N k ij) 2

57 An example Constraints Frame field Deformation Isotropic Anisotropic
 can be regarded as cross fields in a specific Riemannian metric. First compute a discrete metric on the input surface.")
58 Paper: Frame Field Generation through Metric Customization Generic frame fields (with arbitrary anisotropy, orientation, and sizing) can be regarded as cross fields in a specific Riemannian metric. First compute a discrete metric on the input surface.

59 2 2 directional field Paper: General Planar Quadrilateral Mesh Design Using Conjugate Direction Field F = v, w, v, w v = w Equivalent classes using permutation v, w, v, w w, v, w, v v, w, v, w w, v, w, v Signed-permutation matrix group G , , ,
60 Smoothness of 2 2 directional field Transformation between adjacent faces v f w f = v g w g P fg Smoothness measure closeness from P fg to G f e g E fg = i H P fg, i + H(P fg i, ) + i P fg, i P fg i, det P fg 1 2 H η = η x 2 η y 2 + η y 2 η z 2 + η z 2 η x 2
61 Example
62 Extension to 3D field Paper: All-Hex Meshing using Singularity-Restricted Field F = {U, V, W} Right-handled: U V W > 0 24 equivalent classes since the permutations form the chiral cubical symmetry group G. First vector has six options Second one has four options Third one only has one options = 24 Smoothness measure: closeness from P fg to G Similar to former method
63 Efficiency Former methods: Large-scale sparse linear system or nonlinear energy Expensive: too many variables Global view Is there any other ways? Reducing the variable number Starting from local view

64 Paper: Instant Field-Aligned Meshes

65 Key techniques Gauss-Seidel method 1 v i j Ω(i) w w ij v j ij j Ω(i) Multiresolution hierarchy improve convergence allow the algorithm to move out of local minima
Spectral Processing. Misha Kazhdan
 Spectral Processing Misha Kazhdan [Taubin, 1995] A Signal Processing Approach to Fair Surface Design [Desbrun, et al., 1999] Implicit Fairing of Arbitrary Meshes [Vallet and Levy, 2008] Spectral Geometry
Spectral Processing Misha Kazhdan [Taubin, 1995] A Signal Processing Approach to Fair Surface Design [Desbrun, et al., 1999] Implicit Fairing of Arbitrary Meshes [Vallet and Levy, 2008] Spectral Geometry
Classical differential geometry of two-dimensional surfaces
 Classical differential geometry of two-dimensional surfaces 1 Basic definitions This section gives an overview of the basic notions of differential geometry for twodimensional surfaces. It follows mainly
Classical differential geometry of two-dimensional surfaces 1 Basic definitions This section gives an overview of the basic notions of differential geometry for twodimensional surfaces. It follows mainly
LECTURE 9: MOVING FRAMES IN THE NONHOMOGENOUS CASE: FRAME BUNDLES. 1. Introduction
 LECTURE 9: MOVING FRAMES IN THE NONHOMOGENOUS CASE: FRAME BUNDLES 1. Introduction Until now we have been considering homogenous spaces G/H where G is a Lie group and H is a closed subgroup. The natural
LECTURE 9: MOVING FRAMES IN THE NONHOMOGENOUS CASE: FRAME BUNDLES 1. Introduction Until now we have been considering homogenous spaces G/H where G is a Lie group and H is a closed subgroup. The natural
Morphing. Xiao-Ming Fu
 Morphing Xiao-Ming Fu Outlines Definition Angle, length, area, volume, and curvature Example-Driven Deformations Based on Discrete Shells Affine transformation As-Rigid-As-Possible Shape Interpolation
Morphing Xiao-Ming Fu Outlines Definition Angle, length, area, volume, and curvature Example-Driven Deformations Based on Discrete Shells Affine transformation As-Rigid-As-Possible Shape Interpolation
MATH DIFFERENTIAL GEOMETRY. Contents
 MATH 3968 - DIFFERENTIAL GEOMETRY ANDREW TULLOCH Contents 1. Curves in R N 2 2. General Analysis 2 3. Surfaces in R 3 3 3.1. The Gauss Bonnet Theorem 8 4. Abstract Manifolds 9 1 MATH 3968 - DIFFERENTIAL
MATH 3968 - DIFFERENTIAL GEOMETRY ANDREW TULLOCH Contents 1. Curves in R N 2 2. General Analysis 2 3. Surfaces in R 3 3 3.1. The Gauss Bonnet Theorem 8 4. Abstract Manifolds 9 1 MATH 3968 - DIFFERENTIAL
Stratification of 3 3 Matrices
 Stratification of 3 3 Matrices Meesue Yoo & Clay Shonkwiler March 2, 2006 1 Warmup with 2 2 Matrices { Best matrices of rank 2} = O(2) S 3 ( 2) { Best matrices of rank 1} S 3 (1) 1.1 Viewing O(2) S 3 (
Stratification of 3 3 Matrices Meesue Yoo & Clay Shonkwiler March 2, 2006 1 Warmup with 2 2 Matrices { Best matrices of rank 2} = O(2) S 3 ( 2) { Best matrices of rank 1} S 3 (1) 1.1 Viewing O(2) S 3 (
Lectures in Discrete Differential Geometry 2 Surfaces
 Lectures in Discrete Differential Geometry 2 Surfaces Etienne Vouga February 4, 24 Smooth Surfaces in R 3 In this section we will review some properties of smooth surfaces R 3. We will assume that is parameterized
Lectures in Discrete Differential Geometry 2 Surfaces Etienne Vouga February 4, 24 Smooth Surfaces in R 3 In this section we will review some properties of smooth surfaces R 3. We will assume that is parameterized
Background Mathematics (2/2) 1. David Barber
 1. David Barber") Background Mathematics (2/2) 1 David Barber University College London Modified by Samson Cheung (sccheung@ieee.org) 1 These slides accompany the book Bayesian Reasoning and Machine Learning. The book and
Background Mathematics (2/2) 1 David Barber University College London Modified by Samson Cheung (sccheung@ieee.org) 1 These slides accompany the book Bayesian Reasoning and Machine Learning. The book and
EE Technion, Spring then. can be isometrically embedded into can be realized as a Gram matrix of rank, Properties:
 5/25/200 2 A mathematical exercise Assume points with the metric are isometrically embeddable into Then, there exists a canonical form such that for all Spectral methods We can also write Alexander & Michael
5/25/200 2 A mathematical exercise Assume points with the metric are isometrically embeddable into Then, there exists a canonical form such that for all Spectral methods We can also write Alexander & Michael
Linear Algebra Massoud Malek
 CSUEB Linear Algebra Massoud Malek Inner Product and Normed Space In all that follows, the n n identity matrix is denoted by I n, the n n zero matrix by Z n, and the zero vector by θ n An inner product
CSUEB Linear Algebra Massoud Malek Inner Product and Normed Space In all that follows, the n n identity matrix is denoted by I n, the n n zero matrix by Z n, and the zero vector by θ n An inner product
Introduction to Group Theory
 Chapter 10 Introduction to Group Theory Since symmetries described by groups play such an important role in modern physics, we will take a little time to introduce the basic structure (as seen by a physicist)
Chapter 10 Introduction to Group Theory Since symmetries described by groups play such an important role in modern physics, we will take a little time to introduce the basic structure (as seen by a physicist)
Statistical Geometry Processing Winter Semester 2011/2012
 Statistical Geometry Processing Winter Semester 2011/2012 Linear Algebra, Function Spaces & Inverse Problems Vector and Function Spaces 3 Vectors vectors are arrows in space classically: 2 or 3 dim. Euclidian
Statistical Geometry Processing Winter Semester 2011/2012 Linear Algebra, Function Spaces & Inverse Problems Vector and Function Spaces 3 Vectors vectors are arrows in space classically: 2 or 3 dim. Euclidian
Tensor fields. Tensor fields: Outline. Chantal Oberson Ausoni
 Tensor fields Chantal Oberson Ausoni 7.8.2014 ICS Summer school Roscoff - Visualization at the interfaces 28.7-8.8, 2014 1 Tensor fields: Outline 1. TENSOR FIELDS: DEFINITION 2. PROPERTIES OF SECOND-ORDER
Tensor fields Chantal Oberson Ausoni 7.8.2014 ICS Summer school Roscoff - Visualization at the interfaces 28.7-8.8, 2014 1 Tensor fields: Outline 1. TENSOR FIELDS: DEFINITION 2. PROPERTIES OF SECOND-ORDER
Mobile Robotics 1. A Compact Course on Linear Algebra. Giorgio Grisetti
 Mobile Robotics 1 A Compact Course on Linear Algebra Giorgio Grisetti SA-1 Vectors Arrays of numbers They represent a point in a n dimensional space 2 Vectors: Scalar Product Scalar-Vector Product Changes
Mobile Robotics 1 A Compact Course on Linear Algebra Giorgio Grisetti SA-1 Vectors Arrays of numbers They represent a point in a n dimensional space 2 Vectors: Scalar Product Scalar-Vector Product Changes
CALCULUS ON MANIFOLDS. 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M =
 CALCULUS ON MANIFOLDS 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M = a M T am, called the tangent bundle, is itself a smooth manifold, dim T M = 2n. Example 1.
CALCULUS ON MANIFOLDS 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M = a M T am, called the tangent bundle, is itself a smooth manifold, dim T M = 2n. Example 1.
Lecture 10: A (Brief) Introduction to Group Theory (See Chapter 3.13 in Boas, 3rd Edition)
 Introduction to Group Theory (See Chapter 3.13 in Boas, 3rd Edition)") Lecture 0: A (Brief) Introduction to Group heory (See Chapter 3.3 in Boas, 3rd Edition) Having gained some new experience with matrices, which provide us with representations of groups, and because symmetries
Lecture 0: A (Brief) Introduction to Group heory (See Chapter 3.3 in Boas, 3rd Edition) Having gained some new experience with matrices, which provide us with representations of groups, and because symmetries
CE-570 Advanced Structural Mechanics - Arun Prakash
 Ch1-Intro Page 1 CE-570 Advanced Structural Mechanics - Arun Prakash The BIG Picture What is Mechanics? Mechanics is study of how things work: how anything works, how the world works! People ask: "Do you
Ch1-Intro Page 1 CE-570 Advanced Structural Mechanics - Arun Prakash The BIG Picture What is Mechanics? Mechanics is study of how things work: how anything works, how the world works! People ask: "Do you
MILNOR SEMINAR: DIFFERENTIAL FORMS AND CHERN CLASSES
 MILNOR SEMINAR: DIFFERENTIAL FORMS AND CHERN CLASSES NILAY KUMAR In these lectures I want to introduce the Chern-Weil approach to characteristic classes on manifolds, and in particular, the Chern classes.
MILNOR SEMINAR: DIFFERENTIAL FORMS AND CHERN CLASSES NILAY KUMAR In these lectures I want to introduce the Chern-Weil approach to characteristic classes on manifolds, and in particular, the Chern classes.
Modern Geometric Structures and Fields
 Modern Geometric Structures and Fields S. P. Novikov I.A.TaJmanov Translated by Dmitry Chibisov Graduate Studies in Mathematics Volume 71 American Mathematical Society Providence, Rhode Island Preface
Modern Geometric Structures and Fields S. P. Novikov I.A.TaJmanov Translated by Dmitry Chibisov Graduate Studies in Mathematics Volume 71 American Mathematical Society Providence, Rhode Island Preface
Upon successful completion of MATH 220, the student will be able to:
 MATH 220 Matrices Upon successful completion of MATH 220, the student will be able to: 1. Identify a system of linear equations (or linear system) and describe its solution set 2. Write down the coefficient
MATH 220 Matrices Upon successful completion of MATH 220, the student will be able to: 1. Identify a system of linear equations (or linear system) and describe its solution set 2. Write down the coefficient
CHAPTER 3. Gauss map. In this chapter we will study the Gauss map of surfaces in R 3.
 CHAPTER 3 Gauss map In this chapter we will study the Gauss map of surfaces in R 3. 3.1. Surfaces in R 3 Let S R 3 be a submanifold of dimension 2. Let {U i, ϕ i } be a DS on S. For any p U i we have a
CHAPTER 3 Gauss map In this chapter we will study the Gauss map of surfaces in R 3. 3.1. Surfaces in R 3 Let S R 3 be a submanifold of dimension 2. Let {U i, ϕ i } be a DS on S. For any p U i we have a
CHAPTER 1 PRELIMINARIES
 CHAPTER 1 PRELIMINARIES 1.1 Introduction The aim of this chapter is to give basic concepts, preliminary notions and some results which we shall use in the subsequent chapters of the thesis. 1.2 Differentiable
CHAPTER 1 PRELIMINARIES 1.1 Introduction The aim of this chapter is to give basic concepts, preliminary notions and some results which we shall use in the subsequent chapters of the thesis. 1.2 Differentiable
5 Constructions of connections
 [under construction] 5 Constructions of connections 5.1 Connections on manifolds and the Levi-Civita theorem We start with a bit of terminology. A connection on the tangent bundle T M M of a manifold M
[under construction] 5 Constructions of connections 5.1 Connections on manifolds and the Levi-Civita theorem We start with a bit of terminology. A connection on the tangent bundle T M M of a manifold M
Tangent spaces, normals and extrema
 Chapter 3 Tangent spaces, normals and extrema If S is a surface in 3-space, with a point a S where S looks smooth, i.e., without any fold or cusp or self-crossing, we can intuitively define the tangent
Chapter 3 Tangent spaces, normals and extrema If S is a surface in 3-space, with a point a S where S looks smooth, i.e., without any fold or cusp or self-crossing, we can intuitively define the tangent
Curvilinear coordinates
 C Curvilinear coordinates The distance between two points Euclidean space takes the simplest form (2-4) in Cartesian coordinates. The geometry of concrete physical problems may make non-cartesian coordinates
C Curvilinear coordinates The distance between two points Euclidean space takes the simplest form (2-4) in Cartesian coordinates. The geometry of concrete physical problems may make non-cartesian coordinates
2. TRIGONOMETRY 3. COORDINATEGEOMETRY: TWO DIMENSIONS
 1 TEACHERS RECRUITMENT BOARD, TRIPURA (TRBT) EDUCATION (SCHOOL) DEPARTMENT, GOVT. OF TRIPURA SYLLABUS: MATHEMATICS (MCQs OF 150 MARKS) SELECTION TEST FOR POST GRADUATE TEACHER(STPGT): 2016 1. ALGEBRA Sets:
1 TEACHERS RECRUITMENT BOARD, TRIPURA (TRBT) EDUCATION (SCHOOL) DEPARTMENT, GOVT. OF TRIPURA SYLLABUS: MATHEMATICS (MCQs OF 150 MARKS) SELECTION TEST FOR POST GRADUATE TEACHER(STPGT): 2016 1. ALGEBRA Sets:
CSE 554 Lecture 7: Alignment
 CSE 554 Lecture 7: Alignment Fall 2012 CSE554 Alignment Slide 1 Review Fairing (smoothing) Relocating vertices to achieve a smoother appearance Method: centroid averaging Simplification Reducing vertex
CSE 554 Lecture 7: Alignment Fall 2012 CSE554 Alignment Slide 1 Review Fairing (smoothing) Relocating vertices to achieve a smoother appearance Method: centroid averaging Simplification Reducing vertex
Tensor Visualization. CSC 7443: Scientific Information Visualization
 Tensor Visualization Tensor data A tensor is a multivariate quantity Scalar is a tensor of rank zero s = s(x,y,z) Vector is a tensor of rank one v = (v x,v y,v z ) For a symmetric tensor of rank 2, its
Tensor Visualization Tensor data A tensor is a multivariate quantity Scalar is a tensor of rank zero s = s(x,y,z) Vector is a tensor of rank one v = (v x,v y,v z ) For a symmetric tensor of rank 2, its
Distances, volumes, and integration
 Distances, volumes, and integration Scribe: Aric Bartle 1 Local Shape of a Surface A question that we may ask ourselves is what significance does the second fundamental form play in the geometric characteristics
Distances, volumes, and integration Scribe: Aric Bartle 1 Local Shape of a Surface A question that we may ask ourselves is what significance does the second fundamental form play in the geometric characteristics
Spectral Algorithms I. Slides based on Spectral Mesh Processing Siggraph 2010 course
 Spectral Algorithms I Slides based on Spectral Mesh Processing Siggraph 2010 course Why Spectral? A different way to look at functions on a domain Why Spectral? Better representations lead to simpler solutions
Spectral Algorithms I Slides based on Spectral Mesh Processing Siggraph 2010 course Why Spectral? A different way to look at functions on a domain Why Spectral? Better representations lead to simpler solutions
II. DIFFERENTIABLE MANIFOLDS. Washington Mio CENTER FOR APPLIED VISION AND IMAGING SCIENCES
 II. DIFFERENTIABLE MANIFOLDS Washington Mio Anuj Srivastava and Xiuwen Liu (Illustrations by D. Badlyans) CENTER FOR APPLIED VISION AND IMAGING SCIENCES Florida State University WHY MANIFOLDS? Non-linearity
II. DIFFERENTIABLE MANIFOLDS Washington Mio Anuj Srivastava and Xiuwen Liu (Illustrations by D. Badlyans) CENTER FOR APPLIED VISION AND IMAGING SCIENCES Florida State University WHY MANIFOLDS? Non-linearity
Medical Visualization - Tensor Visualization. J.-Prof. Dr. Kai Lawonn
 Medical Visualization - Tensor Visualization J.-Prof. Dr. Kai Lawonn Lecture is partially based on the lecture by Prof. Thomas Schultz 2 What is a Tensor? A tensor is a multilinear transformation that
Medical Visualization - Tensor Visualization J.-Prof. Dr. Kai Lawonn Lecture is partially based on the lecture by Prof. Thomas Schultz 2 What is a Tensor? A tensor is a multilinear transformation that
Part IB GEOMETRY (Lent 2016): Example Sheet 1
: Example Sheet 1") Part IB GEOMETRY (Lent 2016): Example Sheet 1 (a.g.kovalev@dpmms.cam.ac.uk) 1. Suppose that H is a hyperplane in Euclidean n-space R n defined by u x = c for some unit vector u and constant c. The reflection
Part IB GEOMETRY (Lent 2016): Example Sheet 1 (a.g.kovalev@dpmms.cam.ac.uk) 1. Suppose that H is a hyperplane in Euclidean n-space R n defined by u x = c for some unit vector u and constant c. The reflection
MATH 583A REVIEW SESSION #1
 MATH 583A REVIEW SESSION #1 BOJAN DURICKOVIC 1. Vector Spaces Very quick review of the basic linear algebra concepts (see any linear algebra textbook): (finite dimensional) vector space (or linear space),
MATH 583A REVIEW SESSION #1 BOJAN DURICKOVIC 1. Vector Spaces Very quick review of the basic linear algebra concepts (see any linear algebra textbook): (finite dimensional) vector space (or linear space),
How curvature shapes space
 How curvature shapes space Richard Schoen University of California, Irvine - Hopf Lecture, ETH, Zürich - October 30, 2017 The lecture will have three parts: Part 1: Heinz Hopf and Riemannian geometry Part
How curvature shapes space Richard Schoen University of California, Irvine - Hopf Lecture, ETH, Zürich - October 30, 2017 The lecture will have three parts: Part 1: Heinz Hopf and Riemannian geometry Part
Geometry for Physicists
 Hung Nguyen-Schafer Jan-Philip Schmidt Tensor Analysis and Elementary Differential Geometry for Physicists and Engineers 4 i Springer Contents 1 General Basis and Bra-Ket Notation 1 1.1 Introduction to
Hung Nguyen-Schafer Jan-Philip Schmidt Tensor Analysis and Elementary Differential Geometry for Physicists and Engineers 4 i Springer Contents 1 General Basis and Bra-Ket Notation 1 1.1 Introduction to
Econ Slides from Lecture 7
 Econ 205 Sobel Econ 205 - Slides from Lecture 7 Joel Sobel August 31, 2010 Linear Algebra: Main Theory A linear combination of a collection of vectors {x 1,..., x k } is a vector of the form k λ ix i for
Econ 205 Sobel Econ 205 - Slides from Lecture 7 Joel Sobel August 31, 2010 Linear Algebra: Main Theory A linear combination of a collection of vectors {x 1,..., x k } is a vector of the form k λ ix i for
22.3. Repeated Eigenvalues and Symmetric Matrices. Introduction. Prerequisites. Learning Outcomes
 Repeated Eigenvalues and Symmetric Matrices. Introduction In this Section we further develop the theory of eigenvalues and eigenvectors in two distinct directions. Firstly we look at matrices where one
Repeated Eigenvalues and Symmetric Matrices. Introduction In this Section we further develop the theory of eigenvalues and eigenvectors in two distinct directions. Firstly we look at matrices where one
1 Structures 2. 2 Framework of Riemann surfaces Basic configuration Holomorphic functions... 3
 Compact course notes Riemann surfaces Fall 2011 Professor: S. Lvovski transcribed by: J. Lazovskis Independent University of Moscow December 23, 2011 Contents 1 Structures 2 2 Framework of Riemann surfaces
Compact course notes Riemann surfaces Fall 2011 Professor: S. Lvovski transcribed by: J. Lazovskis Independent University of Moscow December 23, 2011 Contents 1 Structures 2 2 Framework of Riemann surfaces
Handout to Wu Characteristic Harvard math table talk Oliver Knill, 3/8/2016
 Handout to Wu Characteristic Harvard math table talk Oliver Knill, 3/8/2016 Definitions Let G = (V, E) be a finite simple graph with vertex set V and edge set E. The f-vector v(g) = (v 0 (G), v 1 (G),...,
Handout to Wu Characteristic Harvard math table talk Oliver Knill, 3/8/2016 Definitions Let G = (V, E) be a finite simple graph with vertex set V and edge set E. The f-vector v(g) = (v 0 (G), v 1 (G),...,
Vectors. January 13, 2013
 Vectors January 13, 2013 The simplest tensors are scalars, which are the measurable quantities of a theory, left invariant by symmetry transformations. By far the most common non-scalars are the vectors,
Vectors January 13, 2013 The simplest tensors are scalars, which are the measurable quantities of a theory, left invariant by symmetry transformations. By far the most common non-scalars are the vectors,
Duke University, Department of Electrical and Computer Engineering Optimization for Scientists and Engineers c Alex Bronstein, 2014
 Duke University, Department of Electrical and Computer Engineering Optimization for Scientists and Engineers c Alex Bronstein, 2014 Linear Algebra A Brief Reminder Purpose. The purpose of this document
Duke University, Department of Electrical and Computer Engineering Optimization for Scientists and Engineers c Alex Bronstein, 2014 Linear Algebra A Brief Reminder Purpose. The purpose of this document
Math 302 Outcome Statements Winter 2013
 Math 302 Outcome Statements Winter 2013 1 Rectangular Space Coordinates; Vectors in the Three-Dimensional Space (a) Cartesian coordinates of a point (b) sphere (c) symmetry about a point, a line, and a
Math 302 Outcome Statements Winter 2013 1 Rectangular Space Coordinates; Vectors in the Three-Dimensional Space (a) Cartesian coordinates of a point (b) sphere (c) symmetry about a point, a line, and a
Physics 6303 Lecture 3 August 27, 2018
 Physics 6303 Lecture 3 August 27, 208 LAST TIME: Vector operators, divergence, curl, examples of line integrals and surface integrals, divergence theorem, Stokes theorem, index notation, Kronecker delta,
Physics 6303 Lecture 3 August 27, 208 LAST TIME: Vector operators, divergence, curl, examples of line integrals and surface integrals, divergence theorem, Stokes theorem, index notation, Kronecker delta,
William P. Thurston. The Geometry and Topology of Three-Manifolds
 William P. Thurston The Geometry and Topology of Three-Manifolds Electronic version 1.1 - March 00 http://www.msri.org/publications/books/gt3m/ This is an electronic edition of the 1980 notes distributed
William P. Thurston The Geometry and Topology of Three-Manifolds Electronic version 1.1 - March 00 http://www.msri.org/publications/books/gt3m/ This is an electronic edition of the 1980 notes distributed
Curvatures, Invariants and How to Get Them Without (M)Any Derivatives
Any Derivatives") Curvatures, Invariants and How to Get Them Without (M)Any Derivatives Mathieu Desbrun & Peter Schröder 1 Classical Notions Curves arclength parameterization center of osculating ( kissing ) circle (also
Curvatures, Invariants and How to Get Them Without (M)Any Derivatives Mathieu Desbrun & Peter Schröder 1 Classical Notions Curves arclength parameterization center of osculating ( kissing ) circle (also
Scaling the Topology of Symmetric, Second-Order Planar Tensor Fields
 Scaling the Topology of Symmetric, Second-Order Planar Tensor Fields Xavier Tricoche, Gerik Scheuermann, and Hans Hagen University of Kaiserslautern, P.O. Box 3049, 67653 Kaiserslautern, Germany E-mail:
Scaling the Topology of Symmetric, Second-Order Planar Tensor Fields Xavier Tricoche, Gerik Scheuermann, and Hans Hagen University of Kaiserslautern, P.O. Box 3049, 67653 Kaiserslautern, Germany E-mail:
Rigid Geometric Transformations
 Rigid Geometric Transformations Carlo Tomasi This note is a quick refresher of the geometry of rigid transformations in three-dimensional space, expressed in Cartesian coordinates. 1 Cartesian Coordinates
Rigid Geometric Transformations Carlo Tomasi This note is a quick refresher of the geometry of rigid transformations in three-dimensional space, expressed in Cartesian coordinates. 1 Cartesian Coordinates
Discrete Differential Geometry. Discrete Laplace-Beltrami operator and discrete conformal mappings.
 Discrete differential geometry. Discrete Laplace-Beltrami operator and discrete conformal mappings. Technische Universität Berlin Geometric Methods in Classical and Quantum Lattice Systems, Caputh, September
Discrete differential geometry. Discrete Laplace-Beltrami operator and discrete conformal mappings. Technische Universität Berlin Geometric Methods in Classical and Quantum Lattice Systems, Caputh, September
The Laplacian ( ) Matthias Vestner Dr. Emanuele Rodolà Room , Informatik IX
 Matthias Vestner Dr. Emanuele Rodolà Room , Informatik IX") The Laplacian (26.05.2014) Matthias Vestner Dr. Emanuele Rodolà {vestner,rodola}@in.tum.de Room 02.09.058, Informatik IX Seminar «The metric approach to shape matching» Alfonso Ros Wednesday, May 28th
The Laplacian (26.05.2014) Matthias Vestner Dr. Emanuele Rodolà {vestner,rodola}@in.tum.de Room 02.09.058, Informatik IX Seminar «The metric approach to shape matching» Alfonso Ros Wednesday, May 28th
,, rectilinear,, spherical,, cylindrical. (6.1)
") Lecture 6 Review of Vectors Physics in more than one dimension (See Chapter 3 in Boas, but we try to take a more general approach and in a slightly different order) Recall that in the previous two lectures
Lecture 6 Review of Vectors Physics in more than one dimension (See Chapter 3 in Boas, but we try to take a more general approach and in a slightly different order) Recall that in the previous two lectures
Tangent bundles, vector fields
 Location Department of Mathematical Sciences,, G5-109. Main Reference: [Lee]: J.M. Lee, Introduction to Smooth Manifolds, Graduate Texts in Mathematics 218, Springer-Verlag, 2002. Homepage for the book,
Location Department of Mathematical Sciences,, G5-109. Main Reference: [Lee]: J.M. Lee, Introduction to Smooth Manifolds, Graduate Texts in Mathematics 218, Springer-Verlag, 2002. Homepage for the book,
arxiv: v2 [math-ph] 24 Feb 2016
![arxiv: v2 [math-ph] 24 Feb 2016](/thumbs/92/109109824.jpg "arxiv: v2 [math-ph] 24 Feb 2016") ON THE CLASSIFICATION OF MULTIDIMENSIONALLY CONSISTENT 3D MAPS MATTEO PETRERA AND YURI B. SURIS Institut für Mathemat MA 7-2 Technische Universität Berlin Str. des 17. Juni 136 10623 Berlin Germany arxiv:1509.03129v2
ON THE CLASSIFICATION OF MULTIDIMENSIONALLY CONSISTENT 3D MAPS MATTEO PETRERA AND YURI B. SURIS Institut für Mathemat MA 7-2 Technische Universität Berlin Str. des 17. Juni 136 10623 Berlin Germany arxiv:1509.03129v2
APPENDIX A. Background Mathematics. A.1 Linear Algebra. Vector algebra. Let x denote the n-dimensional column vector with components x 1 x 2.
 APPENDIX A Background Mathematics A. Linear Algebra A.. Vector algebra Let x denote the n-dimensional column vector with components 0 x x 2 B C @. A x n Definition 6 (scalar product). The scalar product
APPENDIX A Background Mathematics A. Linear Algebra A.. Vector algebra Let x denote the n-dimensional column vector with components 0 x x 2 B C @. A x n Definition 6 (scalar product). The scalar product
Rigid Geometric Transformations
 Rigid Geometric Transformations Carlo Tomasi This note is a quick refresher of the geometry of rigid transformations in three-dimensional space, expressed in Cartesian coordinates. 1 Cartesian Coordinates
Rigid Geometric Transformations Carlo Tomasi This note is a quick refresher of the geometry of rigid transformations in three-dimensional space, expressed in Cartesian coordinates. 1 Cartesian Coordinates
Representation theory and quantum mechanics tutorial Spin and the hydrogen atom
 Representation theory and quantum mechanics tutorial Spin and the hydrogen atom Justin Campbell August 3, 2017 1 Representations of SU 2 and SO 3 (R) 1.1 The following observation is long overdue. Proposition
Representation theory and quantum mechanics tutorial Spin and the hydrogen atom Justin Campbell August 3, 2017 1 Representations of SU 2 and SO 3 (R) 1.1 The following observation is long overdue. Proposition
Gravitation: Tensor Calculus
 An Introduction to General Relativity Center for Relativistic Astrophysics School of Physics Georgia Institute of Technology Notes based on textbook: Spacetime and Geometry by S.M. Carroll Spring 2013
An Introduction to General Relativity Center for Relativistic Astrophysics School of Physics Georgia Institute of Technology Notes based on textbook: Spacetime and Geometry by S.M. Carroll Spring 2013
Introduction to Mobile Robotics Compact Course on Linear Algebra. Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz
 Introduction to Mobile Robotics Compact Course on Linear Algebra Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Vectors Arrays of numbers Vectors represent a point in a n dimensional space
Introduction to Mobile Robotics Compact Course on Linear Algebra Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Vectors Arrays of numbers Vectors represent a point in a n dimensional space
. D CR Nomenclature D 1
 . D CR Nomenclature D 1 Appendix D: CR NOMENCLATURE D 2 The notation used by different investigators working in CR formulations has not coalesced, since the topic is in flux. This Appendix identifies the
. D CR Nomenclature D 1 Appendix D: CR NOMENCLATURE D 2 The notation used by different investigators working in CR formulations has not coalesced, since the topic is in flux. This Appendix identifies the
Homework 2. Solutions T =
 Homework. s Let {e x, e y, e z } be an orthonormal basis in E. Consider the following ordered triples: a) {e x, e x + e y, 5e z }, b) {e y, e x, 5e z }, c) {e y, e x, e z }, d) {e y, e x, 5e z }, e) {
Homework. s Let {e x, e y, e z } be an orthonormal basis in E. Consider the following ordered triples: a) {e x, e x + e y, 5e z }, b) {e y, e x, 5e z }, c) {e y, e x, e z }, d) {e y, e x, 5e z }, e) {
Algebra C Numerical Linear Algebra Sample Exam Problems
 Algebra C Numerical Linear Algebra Sample Exam Problems Notation. Denote by V a finite-dimensional Hilbert space with inner product (, ) and corresponding norm. The abbreviation SPD is used for symmetric
Algebra C Numerical Linear Algebra Sample Exam Problems Notation. Denote by V a finite-dimensional Hilbert space with inner product (, ) and corresponding norm. The abbreviation SPD is used for symmetric
Review of some mathematical tools
 MATHEMATICAL FOUNDATIONS OF SIGNAL PROCESSING Fall 2016 Benjamín Béjar Haro, Mihailo Kolundžija, Reza Parhizkar, Adam Scholefield Teaching assistants: Golnoosh Elhami, Hanjie Pan Review of some mathematical
MATHEMATICAL FOUNDATIONS OF SIGNAL PROCESSING Fall 2016 Benjamín Béjar Haro, Mihailo Kolundžija, Reza Parhizkar, Adam Scholefield Teaching assistants: Golnoosh Elhami, Hanjie Pan Review of some mathematical
Physics 411 Lecture 7. Tensors. Lecture 7. Physics 411 Classical Mechanics II
 Physics 411 Lecture 7 Tensors Lecture 7 Physics 411 Classical Mechanics II September 12th 2007 In Electrodynamics, the implicit law governing the motion of particles is F α = m ẍ α. This is also true,
Physics 411 Lecture 7 Tensors Lecture 7 Physics 411 Classical Mechanics II September 12th 2007 In Electrodynamics, the implicit law governing the motion of particles is F α = m ẍ α. This is also true,
DS-GA 1002 Lecture notes 0 Fall Linear Algebra. These notes provide a review of basic concepts in linear algebra.
 DS-GA 1002 Lecture notes 0 Fall 2016 Linear Algebra These notes provide a review of basic concepts in linear algebra. 1 Vector spaces You are no doubt familiar with vectors in R 2 or R 3, i.e. [ ] 1.1
DS-GA 1002 Lecture notes 0 Fall 2016 Linear Algebra These notes provide a review of basic concepts in linear algebra. 1 Vector spaces You are no doubt familiar with vectors in R 2 or R 3, i.e. [ ] 1.1
Definition 1. A set V is a vector space over the scalar field F {R, C} iff. there are two operations defined on V, called vector addition
 6 Vector Spaces with Inned Product Basis and Dimension Section Objective(s): Vector Spaces and Subspaces Linear (In)dependence Basis and Dimension Inner Product 6 Vector Spaces and Subspaces Definition
6 Vector Spaces with Inned Product Basis and Dimension Section Objective(s): Vector Spaces and Subspaces Linear (In)dependence Basis and Dimension Inner Product 6 Vector Spaces and Subspaces Definition
Symmetries, Groups, and Conservation Laws
 Chapter Symmetries, Groups, and Conservation Laws The dynamical properties and interactions of a system of particles and fields are derived from the principle of least action, where the action is a 4-dimensional
Chapter Symmetries, Groups, and Conservation Laws The dynamical properties and interactions of a system of particles and fields are derived from the principle of least action, where the action is a 4-dimensional
LECTURE NOTE #11 PROF. ALAN YUILLE
 LECTURE NOTE #11 PROF. ALAN YUILLE 1. NonLinear Dimension Reduction Spectral Methods. The basic idea is to assume that the data lies on a manifold/surface in D-dimensional space, see figure (1) Perform
LECTURE NOTE #11 PROF. ALAN YUILLE 1. NonLinear Dimension Reduction Spectral Methods. The basic idea is to assume that the data lies on a manifold/surface in D-dimensional space, see figure (1) Perform
Lines and points. Lines and points
 omogeneous coordinates in the plane Homogeneous coordinates in the plane A line in the plane a + by + c is represented as (a, b, c). A line is a subset of points in the plane. All vectors (ka, kb, kc)
omogeneous coordinates in the plane Homogeneous coordinates in the plane A line in the plane a + by + c is represented as (a, b, c). A line is a subset of points in the plane. All vectors (ka, kb, kc)
Beyond Scalar Affinities for Network Analysis or Vector Diffusion Maps and the Connection Laplacian
 Beyond Scalar Affinities for Network Analysis or Vector Diffusion Maps and the Connection Laplacian Amit Singer Princeton University Department of Mathematics and Program in Applied and Computational Mathematics
Beyond Scalar Affinities for Network Analysis or Vector Diffusion Maps and the Connection Laplacian Amit Singer Princeton University Department of Mathematics and Program in Applied and Computational Mathematics
BERGMAN KERNEL ON COMPACT KÄHLER MANIFOLDS
 BERGMAN KERNEL ON COMPACT KÄHLER MANIFOLDS SHOO SETO Abstract. These are the notes to an expository talk I plan to give at MGSC on Kähler Geometry aimed for beginning graduate students in hopes to motivate
BERGMAN KERNEL ON COMPACT KÄHLER MANIFOLDS SHOO SETO Abstract. These are the notes to an expository talk I plan to give at MGSC on Kähler Geometry aimed for beginning graduate students in hopes to motivate
Mathematical Methods wk 2: Linear Operators
 John Magorrian, magog@thphysoxacuk These are work-in-progress notes for the second-year course on mathematical methods The most up-to-date version is available from http://www-thphysphysicsoxacuk/people/johnmagorrian/mm
John Magorrian, magog@thphysoxacuk These are work-in-progress notes for the second-year course on mathematical methods The most up-to-date version is available from http://www-thphysphysicsoxacuk/people/johnmagorrian/mm
Preliminary/Qualifying Exam in Numerical Analysis (Math 502a) Spring 2012
 Spring 2012") Instructions Preliminary/Qualifying Exam in Numerical Analysis (Math 502a) Spring 2012 The exam consists of four problems, each having multiple parts. You should attempt to solve all four problems. 1.
Instructions Preliminary/Qualifying Exam in Numerical Analysis (Math 502a) Spring 2012 The exam consists of four problems, each having multiple parts. You should attempt to solve all four problems. 1.
Computational Methods CMSC/AMSC/MAPL 460. Eigenvalues and Eigenvectors. Ramani Duraiswami, Dept. of Computer Science
 Computational Methods CMSC/AMSC/MAPL 460 Eigenvalues and Eigenvectors Ramani Duraiswami, Dept. of Computer Science Eigen Values of a Matrix Recap: A N N matrix A has an eigenvector x (non-zero) with corresponding
Computational Methods CMSC/AMSC/MAPL 460 Eigenvalues and Eigenvectors Ramani Duraiswami, Dept. of Computer Science Eigen Values of a Matrix Recap: A N N matrix A has an eigenvector x (non-zero) with corresponding
Dimension Reduction Techniques. Presented by Jie (Jerry) Yu
 Yu") Dimension Reduction Techniques Presented by Jie (Jerry) Yu Outline Problem Modeling Review of PCA and MDS Isomap Local Linear Embedding (LLE) Charting Background Advances in data collection and storage
Dimension Reduction Techniques Presented by Jie (Jerry) Yu Outline Problem Modeling Review of PCA and MDS Isomap Local Linear Embedding (LLE) Charting Background Advances in data collection and storage
INDEX 363. Cartesian coordinates 19,20,42, 67, 83 Cartesian tensors 84, 87, 226
 INDEX 363 A Absolute differentiation 120 Absolute scalar field 43 Absolute tensor 45,46,47,48 Acceleration 121, 190, 192 Action integral 198 Addition of systems 6, 51 Addition of tensors 6, 51 Adherence
INDEX 363 A Absolute differentiation 120 Absolute scalar field 43 Absolute tensor 45,46,47,48 Acceleration 121, 190, 192 Action integral 198 Addition of systems 6, 51 Addition of tensors 6, 51 Adherence
Exercises * on Linear Algebra
 Exercises * on Linear Algebra Laurenz Wiskott Institut für Neuroinformatik Ruhr-Universität Bochum, Germany, EU 4 February 7 Contents Vector spaces 4. Definition...............................................
Exercises * on Linear Algebra Laurenz Wiskott Institut für Neuroinformatik Ruhr-Universität Bochum, Germany, EU 4 February 7 Contents Vector spaces 4. Definition...............................................
GATE Engineering Mathematics SAMPLE STUDY MATERIAL. Postal Correspondence Course GATE. Engineering. Mathematics GATE ENGINEERING MATHEMATICS
 SAMPLE STUDY MATERIAL Postal Correspondence Course GATE Engineering Mathematics GATE ENGINEERING MATHEMATICS ENGINEERING MATHEMATICS GATE Syllabus CIVIL ENGINEERING CE CHEMICAL ENGINEERING CH MECHANICAL
SAMPLE STUDY MATERIAL Postal Correspondence Course GATE Engineering Mathematics GATE ENGINEERING MATHEMATICS ENGINEERING MATHEMATICS GATE Syllabus CIVIL ENGINEERING CE CHEMICAL ENGINEERING CH MECHANICAL
Jordan normal form notes (version date: 11/21/07)
") Jordan normal form notes (version date: /2/7) If A has an eigenbasis {u,, u n }, ie a basis made up of eigenvectors, so that Au j = λ j u j, then A is diagonal with respect to that basis To see this, let
Jordan normal form notes (version date: /2/7) If A has an eigenbasis {u,, u n }, ie a basis made up of eigenvectors, so that Au j = λ j u j, then A is diagonal with respect to that basis To see this, let
Mathematical Tripos Part IA Lent Term Example Sheet 1. Calculate its tangent vector dr/du at each point and hence find its total length.
 Mathematical Tripos Part IA Lent Term 205 ector Calculus Prof B C Allanach Example Sheet Sketch the curve in the plane given parametrically by r(u) = ( x(u), y(u) ) = ( a cos 3 u, a sin 3 u ) with 0 u
Mathematical Tripos Part IA Lent Term 205 ector Calculus Prof B C Allanach Example Sheet Sketch the curve in the plane given parametrically by r(u) = ( x(u), y(u) ) = ( a cos 3 u, a sin 3 u ) with 0 u
Lecture 1 Complex Numbers. 1 The field of complex numbers. 1.1 Arithmetic operations. 1.2 Field structure of C. MATH-GA Complex Variables
 Lecture Complex Numbers MATH-GA 245.00 Complex Variables The field of complex numbers. Arithmetic operations The field C of complex numbers is obtained by adjoining the imaginary unit i to the field R
Lecture Complex Numbers MATH-GA 245.00 Complex Variables The field of complex numbers. Arithmetic operations The field C of complex numbers is obtained by adjoining the imaginary unit i to the field R
A Framework for Analyzing and Constructing Hierarchical-Type A Posteriori Error Estimators
 A Framework for Analyzing and Constructing Hierarchical-Type A Posteriori Error Estimators Jeff Ovall University of Kentucky Mathematics www.math.uky.edu/ jovall jovall@ms.uky.edu Kentucky Applied and
A Framework for Analyzing and Constructing Hierarchical-Type A Posteriori Error Estimators Jeff Ovall University of Kentucky Mathematics www.math.uky.edu/ jovall jovall@ms.uky.edu Kentucky Applied and
Going with the flow: A study of Lagrangian derivatives
 1 Going with the flow: A study of Lagrangian derivatives Jean-Luc Thiffeault Department of Applied Physics and Applied Mathematics Columbia University http://plasma.ap.columbia.edu/~jeanluc/ 12 February
1 Going with the flow: A study of Lagrangian derivatives Jean-Luc Thiffeault Department of Applied Physics and Applied Mathematics Columbia University http://plasma.ap.columbia.edu/~jeanluc/ 12 February
NOTES ON LINEAR ALGEBRA CLASS HANDOUT
 NOTES ON LINEAR ALGEBRA CLASS HANDOUT ANTHONY S. MAIDA CONTENTS 1. Introduction 2 2. Basis Vectors 2 3. Linear Transformations 2 3.1. Example: Rotation Transformation 3 4. Matrix Multiplication and Function
NOTES ON LINEAR ALGEBRA CLASS HANDOUT ANTHONY S. MAIDA CONTENTS 1. Introduction 2 2. Basis Vectors 2 3. Linear Transformations 2 3.1. Example: Rotation Transformation 3 4. Matrix Multiplication and Function
Geometric Modeling Summer Semester 2010 Mathematical Tools (1)
") Geometric Modeling Summer Semester 2010 Mathematical Tools (1) Recap: Linear Algebra Today... Topics: Mathematical Background Linear algebra Analysis & differential geometry Numerical techniques Geometric
Geometric Modeling Summer Semester 2010 Mathematical Tools (1) Recap: Linear Algebra Today... Topics: Mathematical Background Linear algebra Analysis & differential geometry Numerical techniques Geometric
ROTATIONS, ROTATION PATHS, AND QUANTUM SPIN
 ROTATIONS, ROTATION PATHS, AND QUANTUM SPIN MICHAEL THVEDT 1. ABSTRACT This paper describes the construction of the universal covering group Spin(n), n > 2, as a group of homotopy classes of paths starting
ROTATIONS, ROTATION PATHS, AND QUANTUM SPIN MICHAEL THVEDT 1. ABSTRACT This paper describes the construction of the universal covering group Spin(n), n > 2, as a group of homotopy classes of paths starting
Lorentz-covariant spectrum of single-particle states and their field theory Physics 230A, Spring 2007, Hitoshi Murayama
 Lorentz-covariant spectrum of single-particle states and their field theory Physics 30A, Spring 007, Hitoshi Murayama 1 Poincaré Symmetry In order to understand the number of degrees of freedom we need
Lorentz-covariant spectrum of single-particle states and their field theory Physics 30A, Spring 007, Hitoshi Murayama 1 Poincaré Symmetry In order to understand the number of degrees of freedom we need
Math 433 Outline for Final Examination
 Math 433 Outline for Final Examination Richard Koch May 3, 5 Curves From the chapter on curves, you should know. the formula for arc length of a curve;. the definition of T (s), N(s), B(s), and κ(s) for
Math 433 Outline for Final Examination Richard Koch May 3, 5 Curves From the chapter on curves, you should know. the formula for arc length of a curve;. the definition of T (s), N(s), B(s), and κ(s) for
Transparent connections
 The abelian case A definition (M, g) is a closed Riemannian manifold, d = dim M. E M is a rank n complex vector bundle with a Hermitian metric (i.e. a U(n)-bundle). is a Hermitian (i.e. metric) connection
The abelian case A definition (M, g) is a closed Riemannian manifold, d = dim M. E M is a rank n complex vector bundle with a Hermitian metric (i.e. a U(n)-bundle). is a Hermitian (i.e. metric) connection
A Riemannian Framework for Denoising Diffusion Tensor Images
 A Riemannian Framework for Denoising Diffusion Tensor Images Manasi Datar No Institute Given Abstract. Diffusion Tensor Imaging (DTI) is a relatively new imaging modality that has been extensively used
A Riemannian Framework for Denoising Diffusion Tensor Images Manasi Datar No Institute Given Abstract. Diffusion Tensor Imaging (DTI) is a relatively new imaging modality that has been extensively used
Introduction to Mobile Robotics Compact Course on Linear Algebra. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics Compact Course on Linear Algebra Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Vectors Arrays of numbers Vectors represent a point
Introduction to Mobile Robotics Compact Course on Linear Algebra Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Vectors Arrays of numbers Vectors represent a point
Lecture: Some Practical Considerations (3 of 4)
") Stat260/CS294: Spectral Graph Methods Lecture 14-03/10/2015 Lecture: Some Practical Considerations (3 of 4) Lecturer: Michael Mahoney Scribe: Michael Mahoney Warning: these notes are still very rough.
Stat260/CS294: Spectral Graph Methods Lecture 14-03/10/2015 Lecture: Some Practical Considerations (3 of 4) Lecturer: Michael Mahoney Scribe: Michael Mahoney Warning: these notes are still very rough.
Qualifying Exams I, 2014 Spring
 Qualifying Exams I, 2014 Spring 1. (Algebra) Let k = F q be a finite field with q elements. Count the number of monic irreducible polynomials of degree 12 over k. 2. (Algebraic Geometry) (a) Show that
Qualifying Exams I, 2014 Spring 1. (Algebra) Let k = F q be a finite field with q elements. Count the number of monic irreducible polynomials of degree 12 over k. 2. (Algebraic Geometry) (a) Show that
Linear Algebra: Matrix Eigenvalue Problems
 CHAPTER8 Linear Algebra: Matrix Eigenvalue Problems Chapter 8 p1 A matrix eigenvalue problem considers the vector equation (1) Ax = λx. 8.0 Linear Algebra: Matrix Eigenvalue Problems Here A is a given
CHAPTER8 Linear Algebra: Matrix Eigenvalue Problems Chapter 8 p1 A matrix eigenvalue problem considers the vector equation (1) Ax = λx. 8.0 Linear Algebra: Matrix Eigenvalue Problems Here A is a given
Repeated Eigenvalues and Symmetric Matrices
 Repeated Eigenvalues and Symmetric Matrices. Introduction In this Section we further develop the theory of eigenvalues and eigenvectors in two distinct directions. Firstly we look at matrices where one
Repeated Eigenvalues and Symmetric Matrices. Introduction In this Section we further develop the theory of eigenvalues and eigenvectors in two distinct directions. Firstly we look at matrices where one
SOME EXERCISES IN CHARACTERISTIC CLASSES
 SOME EXERCISES IN CHARACTERISTIC CLASSES 1. GAUSSIAN CURVATURE AND GAUSS-BONNET THEOREM Let S R 3 be a smooth surface with Riemannian metric g induced from R 3. Its Levi-Civita connection can be defined
SOME EXERCISES IN CHARACTERISTIC CLASSES 1. GAUSSIAN CURVATURE AND GAUSS-BONNET THEOREM Let S R 3 be a smooth surface with Riemannian metric g induced from R 3. Its Levi-Civita connection can be defined
Clifford Algebras and Spin Groups
 Clifford Algebras and Spin Groups Math G4344, Spring 2012 We ll now turn from the general theory to examine a specific class class of groups: the orthogonal groups. Recall that O(n, R) is the group of
Clifford Algebras and Spin Groups Math G4344, Spring 2012 We ll now turn from the general theory to examine a specific class class of groups: the orthogonal groups. Recall that O(n, R) is the group of
Euler Characteristic of Two-Dimensional Manifolds
 Euler Characteristic of Two-Dimensional Manifolds M. Hafiz Khusyairi August 2008 In this work we will discuss an important notion from topology, namely Euler Characteristic and we will discuss several
Euler Characteristic of Two-Dimensional Manifolds M. Hafiz Khusyairi August 2008 In this work we will discuss an important notion from topology, namely Euler Characteristic and we will discuss several
NUMERICAL COMPUTATION IN SCIENCE AND ENGINEERING
 NUMERICAL COMPUTATION IN SCIENCE AND ENGINEERING C. Pozrikidis University of California, San Diego New York Oxford OXFORD UNIVERSITY PRESS 1998 CONTENTS Preface ix Pseudocode Language Commands xi 1 Numerical
NUMERICAL COMPUTATION IN SCIENCE AND ENGINEERING C. Pozrikidis University of California, San Diego New York Oxford OXFORD UNIVERSITY PRESS 1998 CONTENTS Preface ix Pseudocode Language Commands xi 1 Numerical
The Einstein field equations
 The Einstein field equations Part II: The Friedmann model of the Universe Atle Hahn GFM, Universidade de Lisboa Lisbon, 4th February 2010 Contents: 1 Geometric background 2 The Einstein field equations
The Einstein field equations Part II: The Friedmann model of the Universe Atle Hahn GFM, Universidade de Lisboa Lisbon, 4th February 2010 Contents: 1 Geometric background 2 The Einstein field equations
The Hodge Star Operator
 The Hodge Star Operator Rich Schwartz April 22, 2015 1 Basic Definitions We ll start out by defining the Hodge star operator as a map from k (R n ) to n k (R n ). Here k (R n ) denotes the vector space
The Hodge Star Operator Rich Schwartz April 22, 2015 1 Basic Definitions We ll start out by defining the Hodge star operator as a map from k (R n ) to n k (R n ). Here k (R n ) denotes the vector space