Research Article Vibration Analysis and Experimental Research of the Linear-Motor-Driven Water Piston Pump Used in the Naval Ship
|
|
|
- Ashlee Reynolds
- 5 years ago
- Views:
Transcription
1 Research Article Vibratio Aalysis ad Experimetal Research of the Liear-Motor-Drive Water Pisto Pump Used i the Naval Ship Ye-qig Huag, Sog-li Nie, Hui Ji, ad Shuag Nie 2 Beijig Key Laboratory of Advaced Maufacturig Techology, Beijig Uiversity of Techology, Beijig 24, Chia 2 Faculty of Applied Sciece ad Egieerig, Uiversity of Toroto, Toroto, ON, Caada M5S A4 Correspodece should be addressed to Sog-li Nie; iesogli@bjut.edu.c Received 3 March 26; Accepted 22 Jue 26 Academic Editor: Carlo Raiieri Copyright 26 Ye-qig Huag et al. This is a ope access article distributed uder the Creative Commos Attributio Licese, which permits urestricted use, distributio, ad reproductio i ay medium, provided the origial work is properly cited. Aimig at the existig problems of traditioal water pisto pump used i the aval ship, such as low efficiecy, high oise, large vibratio, ad oitelliget cotrol, a ew type of liear-motor-drive water pisto pump is developed ad its vibratio characteristics are aalyzed i this research. Based o the 3D model of the structure, the simulatio aalyses icludig static stress aalysis, modal aalysis, ad harmoic respose aalysis are coducted. The simulatio results reveal that the mode shape uder low frequecy stage is maily associated with the eccetricity swig of the pisto rod. The vibratio experimet results show that the resoace frequecy of liear-motor-drive water pisto pump is cocetrated upo 5 Hz ad 8 Hz i the low frequecy rage. The dampers ca chage the resoace frequecy of the system to a certai extet. The vibratio uder triagular motio curve is much better tha that of S curve, which is cosistet with the simulatio coclusio. This research provides a effective method to detect the vibratio characteristics ad a referece for desig ad optimizatio of the liear-motor-drive water pisto pump.. Itroductio High-pressure water pump is oe of importat piece of equipmet i ship egieerig [, 2]. There are several kids of high-pressure water pumps istalled i cabis, such as bilge pump, draiage pump, seawater coolig pump, highpressure water mist pump, ad desaliatio uit pump. Water axial pisto pump is characterized by higher pressure, higher volumetric efficiecy, ad lower pv values of the frictio pairs i compariso with hydraulic gear ad vae pumps [3 5]. However, the traditioal axial pisto pump drive by rotary motor has some itrisic disadvatages. For example, it would produce the alteratig axial impact forcesactigothecylideradpistowhethehigh ad low pressure are switchig ad spread out through the swash plate ad bearig. Owig to both rotary motio ad reciprocatig motio existig i covetioal axial pisto pump, they lead to a large amplitude ad low frequecy pressure pulsatio. The pulsatig force acts o the fluid ot olyithepipebutalsoithepumpbody,whichwould cause the axial rotatio ad lateral vibratio of the pisto pump. By aalyzig mechaical disturbig force, it shows that the first-order overturig momet, first-order reciprocatig iertia force, secod-order reciprocatig iertia momet, ad cetrifugal force exist i the pump set. The ubalace force produced by the mechaical motio ad the effect of fluid pulsatio would cause the fudametal frequecy oise, secod ad third times harmoic oise. Those harmoic oises have aggregated most of the pisto pump oise eergy ad determied a high total oise level. I order to overcome these shortcomigs, the liear-motor-drive water pisto pump is developed [6, 7]. Compared with the traditioal pisto pump which ca oly regulate the rotor speed of the pump, the liear-motor-drive water pisto pump ca obtai a good flow output ad vibratio performace through chagig its movemet frequecy. Previously, several researchers studied the vibratio characteristics of hydraulic pisto pump/motor. Shi [8] ivestigated the dyamic behavior of the cylider pressure cosiderig a geeral system of a pisto pump, a fluid power lie, ad ed resistace. It was show that the harmoic of maximumpulsatioamplitudewasrelatedtotherotatig
2 2 Shock ad Vibratio frequecy ad discharge pressure of the pump. There have bee efforts o uderstadig the vibratio characteristics of axial pisto pump ad motor. Bahr et al. [9] studied the vibratio characteristics of the pumpig mechaism of costat power regulated swash plate axial pisto pump by developig a mathematical model. Che et al. [ 2] studied the dyamic vibratio characteristics of the water fluid power pisto motor. They also preseted several methods for modelig ad aalyzig the vibratio sigals to diagose the faults of water fluid power pisto motor. Johasso et al. [3] studied oise characteristics which ifluece by the cross-agle i a axial pisto pump. The experimets have verified that with the optimized cross-agle, the soud level is effectively reduced. Achte [4] studied the vibratio characteristics of a variable displacemet axial pisto pump. The vibratig movemet of the swash plate is measured ad the experimets have show the effects betwee swash plate vibratio ad the displacemet of idividual pistos. Actually, the covetioal rotary-motor-drive pisto pump would produce ubalaced loadig force ad momet o the axis ad cylider body ad is proe to causig large mechaical vibratio ad oise. With the rapid developmet of liear motor techology, more ad more researchers have paid attetio to the applicatio of liear motor i the field of fluid trasmissio ad cotrol field. Early, the liear motor was used i artificial heart, sigle pisto pump, pumpig uit, air compressor, ad so o. Yamada et al. [5] developed a artificial heart drive by liear pulse motor. The thrust/iput power ratio of liear pulse motor was reached, 23.3 N/W, ad the refreshed the liear pulse motor world record at that time. Mei ad Goodall [6] preseted a subsea hydraulic pump system that the overall system cosists of two siglestage double-actio reciprocatig pumps, each of which is drive by two parallel coected double sided permaet maget liear sychroous motors. Fully digital cotrol had bee realized ad implemeted i the simulatio ad also a umber of cotrol strategies had bee tested. The results demostrate that the steady state error of the liear motor is small ad has good robustess agaist ucertaity. Zhag ad Yag [7] studied the costat flow output workig priciple of double-actio liear-motor-drive reciprocatig pump ad discuss the ifluece of motio iterval of motors ad lag agle of pump valve o the pulsatio of systemic flow rates. Hou et al. [8] ivestigated the motio characteristics of three sigle-actio ad double-actio liear motors drive reciprocatig pump i theory. A motio law of uiform-acceleratio, uiform velocity, ad uiformdeceleratio with phase differece of 6 or 2 is proposed to achieve theoretical costat flow rates. The developmet ad applicatio of smart materials also greatly promoted the developmet of the liear motor, which itegrated the techiques of liear motor itelliget cotrol ad hydraulic pump desig to achieve high efficiecy ad power desity. Xiaoetal.[9]developedagreatthrustliearmotorpumpig uit to apply i the oil field. With the oe-year ruig test, the results demostrate that the system ca accurately cotrol the output power of the liear motor through itelliget cotrol techology Cylider block : coil of liear motor 2: delivery valve 3: suctio valve 4: ilet of FDLMP 5: filtrator Cylider block 6: tak 7: pisto rod 8: active cell 9: cable : cotrol system Cotrol system : relief valve 2: outlet of FDLMP 3: flow chael 4: pisto chamber Figure : Schematic diagram of liear-motor-drive pisto pump system. Aimig at the existig problems of traditioal pisto pump used i the aval ship, such as low efficiecy, high oise, large vibratio, ad oitelliget cotrol, a ew type of liear-motor-drive water pisto pump is developed ad its vibratio characteristics are aalyzed i this research. Basedothe3Dmodelofthestructure,thesimulatio aalysis icludig static stress aalysis, modal aalysis, ad harmoic respose aalysis will be coducted, ad the the stress diagram, the atural frequecy, ad the harmoic respose spectrum of the pump system ca be obtaied. I order to optimize the liear motor motio, the motio characteristics uder differet motio curves ad modes are explored. The vibratio respose characteristics of liearmotor-drive water pisto pump will be ivestigated so as to avoid the resoace ad reduce the system vibratio. 2. Cofiguratio ad Simulatio Aalysis The developed liear-motor-drive water pisto pump is composed of four-group permaet maget liear sychroous motor, two sets of highly itegrated valve type pistopumpuits,adoesetofservocotrolsystem.the schematic diagram of liear-motor-drive water pisto pump isillustratedasifigure.theliearmotoractivecellcouples with pisto by the self-aligig mechaism ad drives the pisto rod to reciprocate cotiuously with high frequecy adhighspeed.forexample,whethepistorodisdrive by double-actio liear motor reciprocate i certai velocity plaig, oe pisto chamber (the left chamber) is i suctio process, ad the low pressure water goes through the suctio valve to the pisto chamber; meawhile the other pisto chamber (the right chamber) is i discharge process, ad the water is compressed to high pressure ad output from the delivery valve.


3 Shock ad Vibratio 3 Figure 3: Simplified 3D model of hydraulic pisto pump sectio. Figure 2: Liear-motor-drive water pisto pump system. Theoretically, the costat flow output of the liearmotor-drive water pisto pump could effectively relieve the flowpulsatioadpressureimpactadlowerthevibratioof thepump.toachievecostatflowrate,theprecisevelocity property of sigle liear motor ad the sychroizatio of multiliear motors are of sigificace. Therefore, four axes motio cotrol strategy should be specifically ivestigated basedooperatioplaadumericalsimulatiotocoordiate the operatio phases of liear motors. Furthermore,thepistopumpolyhasoefrictiopair, which ca improve the volumetric efficiecy ad is drive directly by liear motor, which ca avoid the itermediate trasmissio mechaism ad icrease the mechaical efficiecy. By meas of the servo cotrol system, the liearmotor-drive water pisto pump ca get good vibratio characteristics ad a soud flow output performace i compariso with the traditioal water pisto pump which ca oly regulate the movemet by meas of rotor speed cotrol. 2.. Static Aalysis. The liear-motor-drive water pisto pump (as show i Figure 2) icludes liear motors, water hydraulic pisto pump sectio, ad servo cotrol system. I order to reduce the mechaical vibratio of the pump system, the static simulatio aalysis is used to evaluate the stresses, strais, displacemets, ad forces i the mechaical compoets of the pump system. The water hydraulic pisto pump sectio is comprised of two large cyliders, eight distributig valves, ad eight pistos. The simplified 3D model of the water hydraulic pisto pump is built by the software SolidWorks. As show i Figure 3, without affectig the static aalysis results of mai structure, the liear motor ad the other uecessary compoets are igored i the simplified 3D model. The material of cylider block is 36L stailess steel, ad the pisto sleeve is made of alumium broze. Obviously, it is easy to obtai the physical properties of these materials such as Youg s modulus, Poisso s ratio, bulk modulus, ad shear modulus. I the case of ormal operatio coditio, the rated pressure of liear-motor-drive water pisto pump is 6 MPa ad the thrust output of each liear motor reaches 5 KN. TheresultsofstaticaalysisareillustratediFigure4.It ca be see from Figure 4 that the maximum deformatio is close to.5 mm which is far less tha the dimesios of the mechaical structure, ad it occurs at the joit betwee liear motor ad pisto. Similarly, the maximum equivalet stress is about MPa, which is also lower tha the yield stregth of the material. It meas that the mechaical structure of the pisto pump ca sustai ormal operatio loadig coditio Modal Aalysis. Modal is the atural characteristics of the mechaical structure. Each modal has its special characteristics icludig atural frequecy, mode shape, ad dampig ratio [2]. Modal aalysis is geerally employed to deal with the vibratio respose of mechaical structure, ad the modal parameters ca be obtaied by calculatio ortestaalysis.bythemodalaalysismethodtofigure out each order modal characteristic of the structure i the susceptible frequecy rage, it is possible to predict the actual vibratio respose uder actio of various exteral or iteral vibratio sources. Geerally, for a relatively simple system, the modal parameters ad system respose could be obtaied by mathematical method; for a complex system studied i this paper, excessive simplificatio will lead to the results of calculatio ot beig cosistet with actual. For the complex vibratio aalysis, may methods such as fiite elemet aalysis, operatioal modal aalysis, ad experimetal modal aalysis could be applied. While i traditioal experimetal modal aalysis, the forces excitig test sample is cotrolled, ad thetestigiscoductedithelaboratory.ioperatioal modal aalysis, the forces are just the oes which are aturally preseted durig the operatio of the structure [2]. However, either the operatioal modal aalysis method or the experimetal modal aalysis method eeds a large amout test equipmet ad experimetal data as a foudatio [22]. Therefore, the fiite elemet aalysis method is adopted i this study to obtai the system atural frequecies ad mode shapes. For a multidegree of freedom forced vibratio system, the motio equatio ca be expressed as M { χ} +C{ χ} +K{χ} = {F (t)}. ()
 Deformatio diagram A: static structural Total deformatio Time:.542e max.34596e.7772e.947e 8.4225e 2 6.7298e 2 5.4735e 2 3.3649e 2.68245e 2.e Figure 4: Stress ad deformatio diagram.")
![With the coordiate trasformatio {χ} = [u]{q}, substitute it ito (), where M{ q} + C p { q} + K{q}=u T {F (t)}, (2) where C p is the modal dampig matrix.](/docs-images/84/89478864/images/4-4.jpg "Ithecaseofproportioaldampig,thereisC=αM+ βk,sothemodaldampigmatrixcabewritteas C p =u T [αm + βk] u = αu T Mu + βu T Ku =αm+βk.")
4 4 Shock ad Vibratio (a) Stress diagram A: static structural Equivalet stress Type: equivalet (vo-mises) stress Uit: MPa Time: max mi (b) Deformatio diagram A: static structural Total deformatio Time:.542e max.34596e.7772e.947e e e e e e 2.e Figure 4: Stress ad deformatio diagram. With the coordiate trasformatio {χ} = [u]{q}, substitute it ito (), where M{ q} + C p { q} + K{q}=u T {F (t)}, (2) where C p is the modal dampig matrix. Ithecaseofproportioaldampig,thereisC=αM+ βk,sothemodaldampigmatrixcabewritteas C p =u T [αm + βk] u = αu T Mu + βu T Ku =αm+βk. Substitutio of (3) ito (2): M r q r +(αm r +βk r ) q r +K r q r =N r (t) (r=,2,...,), where N r (t) = u T {F(t)}. Make the rth-order modal dampig C r = αm r +βk r, substitutig ito (4): q r +2ζ r ω r q r +ω 2 r q r = N r (t) M r (r=,2,...,), (5) where ζ is dampig ratio ad defied as dimesioless quatity C ζ r = r = αm r +βk r = α+βω r. (6) 2M r ω r 2M r ω r 2ω r I the case of oproportioal dampig, the key problem of (2) is the diagoalizatio of C p ; otherwise, the coordiate trasformatio equatio is still very difficult to solve. Geeral egieerig problems ofte difficultly meet the requiremets. Uder the coditio of satisfyig the egieerig precisio, it is assumed that the modal dampig matrix ca be tured ito a diagoal matrix. The exteral force actig o the system is expressed as (3) (4) {F (t)} = {F} si ωt. (7) The exteral force ca be represeted i the plural form as F (t) =Fsi ωt = Fe jωt, u T F (t) =Ne jωt. (8) Substitutio of (8) ito (2): M q +c q +c 2 q 2 + +c q +K q =N e jωt. M q +c q +c 2 q 2 + +c q +K q =N e jωt. Assumig that the atural frequecies are ot very close ad the dampig is small, the () if ay exteral force frequecy is ot close to atural frequecy, the mai role is the iertia force ad the exteral force; the dampig force ca be eglected; (2) if the frequecy of exteral force is close to the rth-order atural frequecy, the rth equatio is writte as M r q r +c r q +c r2 q 2 + +c rr q r +c r q +K r q r () =N r e jωt. Because the geeralized velocity q r at this time is much larger tha that of other geeralized velocities, the other dampig forcescabeeglected.c rr q r is the oly oe dampig term which eeds to be cosidered (c rr is a diagoal term). The viscous dampig model is a approximate treatmet method, igorig the ifluece of the odiagoal etries which are equal to icrease the respose. Thus, this kid of treatmet method should be safe. Back to (2), assumig that the dampig matrix is diagoal matrix, it could be writte as (9) M i q i +C i q i +K i q i =u T i Fejωt (i=,2,...,). () The coordiates of geeralized coordiate system q i are expressed as q i =Q i e jωt. (2) Substitutio of (2) ito (): ( ω 2 M i +jωc i +K i )Q i e jωt =u T i Fejωt. (3) Ad it could be obtaied that Q i = u T i F u T i K i ω 2 = F +jω i C i K i [( ri 2)+2jζ ir i ], (4) where r i =ω/ω i is frequecy ratio ad ζ i =C i /2 K i M i is dampig ratio.
5 Shock ad Vibratio 5 Therefore, the respose expressio of the system ca be obtaied: { χ=uq=[{u},{u 2 },...,{u} ] u T i = Fu ie jωt K i [( ri 2)+j2ζ ir i ]. i= { { q q 2. q } = } } i= q i {u} i Whe the system is oly excited at the jth coordiate, (5) u ji F j u i e jωt χ= K i [( ri 2)+j2ζ ir i ], (6) i= where u ji represets the value of jth coordiates correspodig to the ith-order mode shape. Similarly,theresposeofaycoordiatesχ k is expressed as u ji u ki F j e jωt χ k = K i [( ri 2)+j2ζ ir i ]. (7) i= Equatio (7) uses modal parameters to describe the vibratio respose, ad the real respose ca be obtaied by solvig the imagiary part. Because of that, ( r 2 i )+j2ζ ir i = where φ i =tg (2ζ i r i /( r 2 i )). Substitutio ito (7): 2 ( ri ) j2ζ ir i ( r 2 i )2 +4ζ 2 i r2 i = e jφ i, ( ri 2)2 +4ζi 2r2 i (8) u ji u ki F j e j(ωt φ i) χ k =, (9) i= K i ( ri 2)2 +4ζi 2r2 i where φ i =tg (2ζ i r i /( r 2 i )), ad the imagiary part could be writte as u ji u ki F j si (ωt φ i ) i= K i ( ri 2)2 +4ζi 2r2 i =χ k si (ωt φ i ). (2) Cosiderig that the ifluece of high-order modal is smaller tha low-order oe, the fore te-order modal is the focus of this research ad the modal aalysis will be coducted by fiite elemet calculatio based o the theory aalysis metioed above. As the water pisto pump sectio bears certai loadig uder ormal operatig coditio, the prestress modal aalysis could be more precisely compared Table : The fore te modes of vibratio. Modes Frequecy (Hz) Modal deformatio (mm) with the free modal aalysis. By modal extractio method of Block Laczos (as show i Figure 5), the first to teth atural frequecies ad mode shapes of hydraulic pisto pump sectio are gaied. Table shows the fore te-order modal frequecies ad correspodig deformatio values of each order atural frequecy. From the modal aalysis results, it is demostrated that the first-order atural frequecy is close to 66.9 Hz, which is larger tha the system motio frequecy (3 Hz), ad the modal deformatio is about 8.3 mm. Due to the large body mass ad low atural frequecy of the cylider block, the resoace of low frequecy stage easily occurs at the joit betwee the liear motor ad pisto. From Figure 5, it ca be see that the mode shape uder low frequecy stage is maily associated with the eccetricity swig of the pisto rod ad the maximum modal deformatio is withi the acceptable rage. The eccetricity swig of pisto rod would cause the ubalaced force ad vibratio as well as the wear failure of the pisto. Thus, to avoid the eccetricity swig of pisto rod, the joit desig should be optimized Harmoic Aalysis. Harmoic respose aalysis (icludig frequecy respose aalysis ad frequecy sweep aalysis) is maily used to aalyze the steady state respose of liear structure accordig to the harmoic loadig. The vibratio harmoic respose aalysis method could reveal the relatioships betwee the frequecy, displacemet, velocity, ad acceleratio uder differet frequecy [23]. I order to evade the resoace ad fatigue, avoidig the excitatio frequecy is oe of effective ways. The iput load of the harmoic respose aalysis is a siusoidal load which is chagig by the time. The primary characteristic values of the load are frequecy ad amplitude, while the load form ca be defied as force, pressure, ad the displacemet. Geerally, the simulatio results are usually the displacemet, stress, ad strai. By aalyzig the output curve, the peak respose frequecy ad amplitude ca be obtaied, which ca be used as the basis of the vibratio mechaism aalysis ad vibratio reductio desig. I a typical multiple degree of freedom system, the dyamicequatioisgiveby M { x} +C{ x} +K{x} =F(t), (2)


 The st-order vibratio mode diagram (b)")


 The 3rd-order vibratio mode diagram")

 The 5th-order vibratio mode diagram")


 The 7th-order vibratio mode diagram")

 The 8th-order vibratio mode diagram")


6 6 Shock ad Vibratio Total deformatio 2 Frequecy: Hz 4.8 max Total deformatio Frequecy: 66.9 Hz max (a) The st-order vibratio mode diagram (b) The 2d-order vibratio mode diagram Total deformatio 4 Frequecy: Hz max Total deformatio 3 Frequecy: 66.5 Hz 7.3 max (c) The 3rd-order vibratio mode diagram (d) The 4th-order vibratio mode diagram Total deformatio 5 Frequecy: Hz max (e) The 5th-order vibratio mode diagram Total deformatio 6 Frequecy: Hz 8.57 max (f) The 6th-order vibratio mode diagram Total deformatio 7 Frequecy: Hz max (g) The 7th-order vibratio mode diagram Total deformatio 8 Frequecy: Hz max (h) The 8th-order vibratio mode diagram Total deformatio Frequecy: Hz 44.8 max Total deformatio 9 Frequecy: Hz max (i) The 9th-order vibratio mode diagram (j) The th-order vibratio mode diagram Figure 5: The fore te-order mode shapes ad atural frequecies.
7 Shock ad Vibratio Deformatio (mm).2. Deformatio (mm) Frequecy (Hz) Frequecy (Hz) Axial directio (a) Deformatio of cylider wall i axial directio Radial directio (b) Deformatio of cylider wall i radial directio..8 Deformatio (mm) Frequecy (Hz) Vertical directio (c) Deformatio of cylider wall i vertical directio Figure 6: Deformatio-frequecy diagrams. where M is the mass matrix, C is the dampig matrix, K is the stiffess matrix, { x} is the acceleratio vector, { x} is the velocity vector, {x} is the displacemet vector, ad F is the load vector. For differet research purposes, it ca be used to solve the differet problem based o formula (2). For istace, whe assumig that the load vector ad dampig matrix is zero, the eigevalue of formula (2) is obtaied ad accordig to the eigevalue the vibratio mode ad atural frequecy ca be aalyzed, while the harmoic aalysis is solvig the structure respose at the assumptio that the iput load is harmoic circulatio which meas F(t) = F si(ωt). I this research, mode superpositio method is applied for harmoic aalysis of the liear-motor-drive water pisto pump based o ANSYS Workbech. The amplitude of excitig force is close to the liear motor thrust output force, amely, 5 KN, while the frequecy rage is from to 25 Hz. The cylider wall is selected as the study surface which is coveiet for the followig experimetal verificatio. The simulatio results are show i Figure 6. The three figures preset the modal deformatio of axial directio (the motio directio of liear motor), radial directio (perpedicular to the liear motor motio directio i the horizotal plae), ad vertical directio, respectively. From Figure 6, it ca be see that the maximum modal deformatio occurs i the radial directio ad catastrophic failure is ot obverse i the structure. The bottom of cylider is set as fixed support i simulatio; the vibratio amplitude is smaller i the vertical directio. I the case that the siusoidal excitatio force is 5 KN, the maximum modal deformatio is.33mm, ad the phase agle is 63. degrees. The maximum stress is about 33.3 MPa occurrig i the vertical
8 8 Shock ad Vibratio directio, ad it does ot exceed the yield stregth of the material. O the other had, the simulatio results demostrate that the resoace frequecies of the liear-motor-drive water pisto pump maily cocetrated uder 5 8 Hz. Because the motio frequecy of the pump is about 3 Hz ad the mass is large, the resoace does ot easily occur uder the low frequecy stage. Thus, whe debuggig the parameters of liear motor, the resoace frequecy should also be avoided. The harmoic aalysis provides a method to predict the dyamic characteristic of structure, which ca help to overcome the harmful effects caused by fatigue, resoace, ad other forced vibratio. Before the system vibratio testig, the PID parameter adjustmet of liear motor should be carried out. I the ext sectio, the experimet will be coducted to verify the harmoic respose aalysis. 3. Vibratio Test ad Results Aalysis 3.. Parameters Debuggig of the System. The vibratio characteristics of the liear-motor-drive water pisto pump are affected by several factors, such as mechaical structure ad servo cotrol system. Compared with the sigle cotrol mode oftraditioalpistopump,theservocotrolsystemofthe liear-motor-drive water pisto pump is able to perform a variety of servo cotrol modes. The splie (i.e., splie iterpolatio algorithm) ad PVT (i.e., locatio-time iterpolatio algorithm) motio mode are the most widely used motio modes of the liear motor. I the splie motio mode, the movemet distace is divided ito equal segmets by the time ad oly eeds to defie the positio of the coordiate poits at the time of operatio. The advatage of this method is that itcareducetheworkloadadfacilitatethecalculatig.the PVTmotiomodeeedstodefiethedistace,velocity,ad move time at the ed of each step. Therefore, it has higher request for computig performace of the servo cotrol system i compariso with the splie motio mode. Sice the pisto is directly coected with the liear motor, the istataeous flow rate of the system is proportioal to the pisto istataeous effective velocity. Thus, the property parameters of liear motor, such as the followig errors, will evetually affect the performace of liear-motordrive water pisto pump. I order to make the pump get steady flow output ad achieve the goal of low vibratio ad oise, it should set the servo cotrol characteristic parameters of liear motor appropriately. The ifluecig factors of servo cotrol characteristics iclude ot oly the motio mode but also the movemet curve. Usually the motio curves are triagular wave ad S wave curve. The velocity mathematic model of triagle wave plaig i the time domai of [, T] is described as follows: 4A T t t T 4 g (t) = { 4A T t+2a T 4 <t 3T 4 { 4A { T t 4A 3T 4 <t T, where A is the speed amplitude of liear motor. (22) Table 2: The followig errors uder differet modes ad curves. Maximum followig errors (cts) Average followig errors (cts) PVT/triagle curve PVT/S curve Splie/triagle curve Splie/S curve Note: cts =.5 μm. The velocity mathematic model of S wave plaig i the time domai of [, T/2] is give by g (t) 2 Jt2 t T V +a(t T ) T t T 2 { V 2 +a(t T 2 ) = 2 J(t T 2) 2 T 2 t T 3 V 3 2 J(t T 3) 2 T 3 t T 4 V 4 a(t T 4 ) T 4 t T 5 { V { 5 a(t T 5 )+ 2 J(t T 5) 2 T 5 t T 6, (23) where a ad J are the costats ad V, V 2, V 3, V 4,adV 5 are the speeds of each iterval, respectively. Oce the acceleratio time, uiform motio time, oe-way movemet distace, ad motio period are determied, the whole motio process ca be derived. For the workig coditio of the liear-motordrive water pisto pump, whe the four-group liear motor move at the phase differece of 9 degrees, respectively, it couldreachthecostatflowoutputtheoretically. For the sake of obtaiig the best ruig state, the dyamic respose characteristics of the liear motor uder differet motio modes ad motio curves have bee coducted i the simulatio system. The debuggig results of the liear motor i simulatio mode uder differet motio modesadcurvesareshowifigure7. I the coordiate system, the horizotal axis represets timeadtheuitisthesecod,whilethelogitudialaxes represet the velocity ad followig error, ad the measurig uitsarects/sadcts(ctsisthecoutiguitofgratig, ad it depeds o the resolutio of gratig; here oe cts is equal to.5μm), respectively. From the debuggig results (as show i Table 2), it ca be see that the simulatio results are similar ad ca meet the ormal operatio uder differet coditios. The better workig coditio is the triagle curve uder PVT motio mode. The average followig error is close to 5. cts ad the maximum followig error is 48. cts. The followig error of liear motor uder triagle curve is lesser tha that of S curve. Obviously, appropriate motio mode ad curve could effectively reduce the followig error to cotrol the actual motio track precisely ad the to lower the vibratio of the pump.

 Time (s) Mtr Act Vel (left")
 Mtr Act Vel (left Err")

 3")


.28.57.85.3.4.7.98 2.")
 (c) Triagle velocity curves")
 Velocity (CTS/s) Followig")


 (d) S")










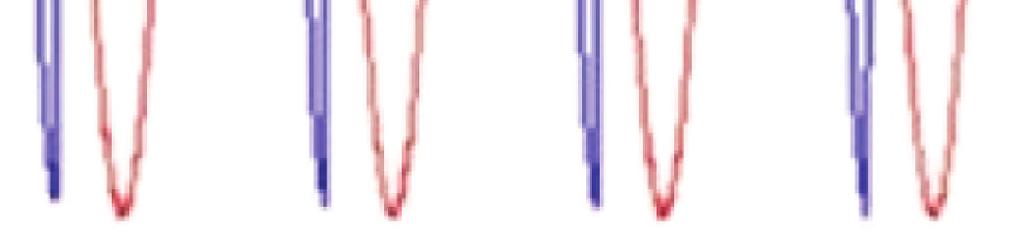

9 Shock ad Vibratio Time (s) Time (s) Mtr Act Vel (left axis) Mtr Act Pos (left axis) Mtr Fol Err (right axis) Mtr Act Vel (left axis) Mtr Act Pos (left axis) Mtr Fol Err (right axis) (a) Triagle velocity curves of liear motor at PVT mode Velocity (CTS/s) Velocity (CTS/s) 3 Followig errors (CTS) (b) S velocity curves of liear motor at PVT mode Time (s) Time (s) Mtr Act Vel (left axis) Mtr Act Pos (left axis) Mtr Fol Err (right axis) (c) Triagle velocity curves of liear motor at splie mode Followig errors (CTS) Velocity (CTS/s) Followig errors (CTS) 3 25 Velocity (CTS/s) Followig errors (CTS) 275 Mtr Act Vel (left axis) Mtr Act Pos (left axis) Mtr Fol Err (right axis) (d) S velocity curves of liear motor at splie mode Figure 7: Debuggig diagram uder differet motio modes ad curves Vibratio Experimet. The vibratio source of the liearmotor-drive water pisto pump maily comes from the motio of mechaism ad the flow pulsatio oise. The mai effect factors of the vibratio respose characteristics i this pump are the respose lag of distributig valve ad sychroous phase error of liear motor. Therefore, uder the certai system structure parameters, the cotrol strategy of liear motor has become the key factor for ifluecig the system vibratio characteristics. O the basis of the above simulatio aalysis, the vibratio experimet is coducted to obtai the vibratio ad oise iformatio. As show i Figure 8, the cylider wall is chose as the test object. The three chaels gather the vibratio sigal of x-axis (the motio directio of liear motor), y-axis (perpedicular to the liear motor motio directio i the horizotal plae), ad z-axis (vertical directio), respectively.

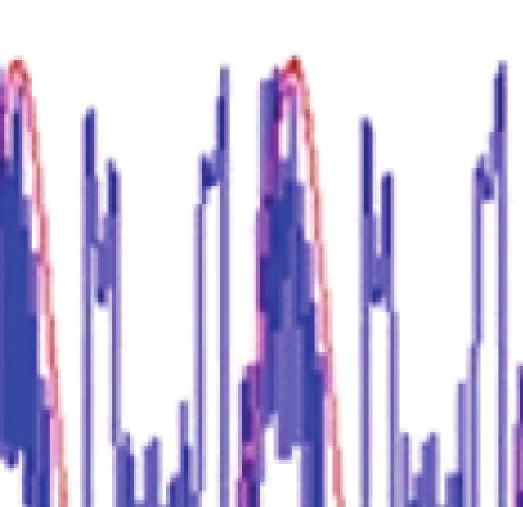
10 Shock ad Vibratio Table 3: Vibratio amplitude of each chael uder the triagle wave motio curve. Sigal chael Maximum amplitude Miimum amplitude Table 4: Vibratio amplitude of each chael uder the S wave motio curve. Sigal chael Maximum amplitude Miimum amplitude the liear motor movemet directio. The dampers mouted at the platform bottom ad cylider wall have a good effect to reduce the vibratio. From aother aspect, the base with a certai degree of flexibility will aggravate the vibratio of system. Therefore, the vibratio amplitude of umber 3 sigal chael is greater tha that of umber. From the previous parameters debuggig of simulatio system, it ca be kow that the followig errors of liear motor uder triagle curve are lesser tha that of S curve. The followig error was ultimately reflected i the vibratio amplitude of test results. Comparig the vibratio amplitudes (as show i Tables 3 ad 4), the vibratio of the triagular wave is sigificatly better tha that of S wave, ad this is cosistet with the simulatio results. By adoptig triagular motio curve uder PVT mode, the cylider vibratio amplitudewasreduced35%,6%,ad8%ix-, y-, adzaxis directio, respectively Power Spectrum Aalysis. Radom vibratio is the most commo type of vibratio, ad it should be studied whe carryig out a vibratio-proof desig. Power spectrum desity (PSD) is a effective method to describe radom vibratio. Geerally, the radom vibratio is characterized by the power spectral desity fuctio, for a time series χ(t) is defied as the Fourier trasform of the correlatio fuctio R χ (τ) [24]: G χy (ω) = 2π R χy (τ) e iωτ dτ. (24) Figure 8: Vibratio test poit. Though Coiv DASP software, the acceleratio, velocity, ad displacemet of the vibratio sigal are collected i real time. Accordig to previous dyamic characteristic simulatio aalysis of the liear motor, the vibratio respose test of triagle curve ad S curve uder PVT motio mode have bee coducted. The motio period is set as.6 secods, ad the stroke is 25 mm. Four groups of liear motor are movig at the phase differece of 9 degrees. After the calculus processig of the collected vibratio data, the amplitude distributio i the time domai of the x-, y-, adz-axis is show i Figure 9. It ca be see from Figure 9 that the periodic vibratio exists i the system ad the vibratio impact cycle is roughly idetical to the system movemet cycle. It demostrates that the mai vibratio source of the liear-motor-drive water pisto pump is cotiuous high-speed reciprocatig motio of the liear motor uit. The vibratio impact is derived from the ubalaced torque caused by the thrust of the liear motor. The vibratio amplitudes of each chael uder the S ad triagle curve are show i Tables 3 ad 4, respectively. Compared to the results of three sigal chaels, the vibratio peak appears i umber 2 sigal chael adthemaximumamplitudeoftriagleadscurveare μm ad 676.8μm, respectively. It meas that severe vibratio occurs i the directio which is perpedicular to The correlatio fuctio is used to describe the relatioship betwee the two values of the same sigal i the iterval τ ad ca be writte as T R (τ) = lim T T x (t) x (t+τ) dt, (25) where x(t) is the vibratio respose of ay trasiet t. The PSD is widely used because the modes could be idicated clearly by spectral peaks. Power spectrum is the cocept of statistical average radom process that is expressed by the sigal power with the chage of frequecy. The horizotal axis uit of power spectrum desity plot is Hz, ad the vertical axis is g 2 /Hz, where g 2 represets the mea square value of the acceleratio. With the DASP software to aalyze the collected data, the power spectrum of the liear-motordrive water pisto pump uder differet motio coditio isshowifigureadthepowerspectrumsofeachsigal chael are displayed i differet graph. Compared to the graphs of sigal chael i the differet motio mode, it ca be observed that the tred of power spectrum is basically idetical. Like the previous aalysis, the power spectrum oly reserves the amplitude iformatio adlostthephaseiformatio.so,thediffereceliesithe amplitude at the resoace frequecy. The amplitudes of each chael uder triagular curve are.25,.82, ad.78 g 2, while the amplitude of each chael uder S curve are.6,.3, ad.36 g 2.Obviously,thevibratioamplitudeoftheS wave is 4 6 times that of triagular wave. The experimetal data show that the vibratio uder triagular motio curve
11 Shock ad Vibratio (D) (2D) (s) 2 2 (s) (3D) (s) (a) Triagle curve, PVT motio mode (D) (s) (2D) (s) (3D) (s) (b) S curve, PVT motio mode Figure 9: Vibratio amplitude distributio i the time domai of the x-, y-,ad z-axis..5 ().5 ().4.4 (g 2 ).3.2 (g 2 ) (g 2 ) (g 2 ). 5 k 5 2k 25 (Hz) (2) k 5 2k 25 (Hz) (3) k 5 2k 25 (Hz) (a) Triagle curve, PVT motio mode (g 2 ) (g 2 ). 5 k 5 2k 25 (Hz).5 (2) k 5 2k 25 (Hz).5 (3) k 5 2k 25 (Hz) (b) S curve, PVT motio mode Figure : Power spectrum of liear-motor-drive water pisto pump system uder triagle ad S motio curve.
12 2 Shock ad Vibratio is much better tha that of S curve, which is cosistet with the previous simulatio coclusio. Differet motio curves will affect the followig errors of the liear motor, which is reflected i the vibratio of the system fially. It ca be see from Figure (a) that, uder the triagular wave motio curve, the peak of umber sigal chael is olyoe-thirdthepeaksofumber2adumber3.thepeak frequecy of umber sigal chael (the motio directio of liear motor) oly appears ear 5 Hz ad has a little differecewiththevalueprovidedbythefemaalysis.withthe dampers equipped o the cylider body i the motio directio of liear motor, it will ievitably lead to the differece betwee the simulatio results ad the experimetal data. Accordig to the data collected by umber 2 sigal chael, the resoace frequecy is maily cocetrated i the viciity of 5 Hz ad 8 Hz. Similarly, the aalysis result of umber 3 sigal chael is essetially cosistet with the harmoic aalysis result. Therefore, the resoace frequecy of liear-motor-drive water pisto pump is cocetrated upo 5Hz ad 8Hz i the low frequecy rage. The dampers ca chage the resoace frequecy of the system to a certai extet. Durig the operatio of the liear-motordrive water pisto pump, the resoace frequecy rage detected by simulatio aalysis ad experimet test should beavoidedtoeffectivelyreducethevibratio. 4. Coclusio Based o the prototype ad three-dimesioal model of the liear-motor-drive water pisto pump, this paper has carried out the vibratio characteristic aalysis. The fiite elemet aalysis software has bee employed to perform a static stress, modal, ad harmoic aalysis. The maximum deformatio ad equivalet stress of the mechaical structure were measured at the rated workig coditio. From the results preseted i this paper, the importat coclusios obtaiedcabedrawasfollows: () The simulatio results reveal that the maximum deformatio ad equivalet stress of the mechaical structure i this pump are.5 mm ad MPa, respectively, which is lower tha the yield stregth of the material ad the allowed deformatio. The first-order atural frequecy is close to 66.9 Hz, which is much larger tha the system motio frequecy (3 Hz), ad the modal deformatio is about 8.3 mm. Ad the mode shape uder low frequecy stage is associated with the eccetricity swig of the pisto rod ad the maximum deformatio is withi the acceptable rage. (2) The harmoic aalysis ad vibratio experimet results show that the resoace frequecy of liear-motordrive water pisto pump is cocetrated upo 5 Hz ad 8 Hz i the low frequecy rage. The dampers ca chage the resoace frequecy of the system to a certai extet. (3) The vibratio uder triagular motio curve is much better tha that of S curve, which is cosistet with the previous simulatio coclusio. The research provides a effective method to detect the vibratio characteristics of the liear-motor-drive water pisto pump ad also a referece for desig ad optimizatio ofthepistopump. Competig Iterests The authors declare that they have o competig iterests. Ackowledgmets The authors would like to thak the Natioal Natural Sciece Foudatios of Chia (os ad 5722), Natioal High-Tech R&D (863) Program (o. 22AA93), Beijig Natural Sciece Foudatio (o ), ad Chia Postdoctoral Sciece Foudatio (o. 25M58946) for their fudig for this research. Refereces []C.Louis,F.Michael,adG.K.Thomas, Waterhydraulic eergy savigs vehicle, i Proceedigs of the 8th Scadiavia Iteratioal Coferece o Fluid Power (SICFP 3), pp.7 28, Tampere, Filad, May 23. [2]H.Y.Yag,J.Yag,adH.Zhou, Researchomaterials of pisto ad cylider of water hydraulic pump, Idustrial Lubricatio ad Tribology, vol. 55, o., pp , 23 (Chiese). [3] G. H. Lim, P. S. K. Chua, ad Y. B. He, Moder water hydraulics the ew eergy-trasmissio techology i fluid power, Applied Eergy, vol. 76, o. 3, pp , 23. [4]L.Yag,S.Nie,adA.Zhag, No-probabilisticwearreliability aalysis of swash-plate/slipper of water hydraulic pisto motor based o covex model, Joural of Mechaical Egieerig Sciece,vol.227,o.3,pp.69 69,23. [5] F. Yi, S. Nie, Z. Zhag, ad X. Zhag, Research o the slidig bearig pair of water hydraulic axial pisto pump, Proceedigs of the Istitutio of Mechaical Egieers, Part C: Joural of Mechaical Egieerig Sciece, vol.227,o.9,pp , 23. [6] W. Dog ad S. Nie, Research o motio plaig of liear motor drive pisto pump, Joural of Chiese Mechaical Egieerig,vol.25,o.8,pp.8 84,24(Chiese). [7] Y.-Q. Huag, S.-L. Nie, F. Liu, L. Li, ad K. Ma, Research of the cotrol strategy ad vibratio test of liear motor drive pisto pump for marie applicatio, Joural of Beijig Uiversity of Techology,vol.4,o.,pp ,25(Chiese). [8] J.-H. Shi, Computatioal study o dyamic pressure i a swash-plate axial pisto pump coected to a hydraulic lie with a ed resistace, JouralofMechaicalSciecead Techology,vol.29,o.6,pp ,25. [9]M.K.Bahr,J.Svoboda,adR.B.Bhat, Vibratioaalysis of costat power regulated swash plate axial pisto pumps, Joural of Soud ad Vibratio, vol.259,o.5,pp , 23. []H.X.Che,P.S.K.Chua,adG.H.Lim, Adaptivewavelet trasform for vibratio sigal modellig ad applicatio i fault diagosis of water hydraulic motor, Mechaical Systems ad Sigal Processig, vol. 2, o. 8, pp , 26. [] H. X. Che, P. S. K. Chua, ad G. H. Lim, Dyamic vibratio aalysis of a swash-plate type water hydraulic motor, Mechaism ad Machie Theory,vol.4,o.5,pp ,26. [2] H.X.Che,P.S.K.Chua,adG.H.Lim, Vibratioaalysis with liftig scheme ad geeralized cross validatio i fault diagosis of water hydraulic system, Joural of Soud ad Vibratio,vol.3,o.3 5,pp ,27.
13 Shock ad Vibratio 3 [3] A. Johasso, J. Ölvader, ad J.-O. Palmberg, Experimetal verificatio of cross-agle for oise reductio i hydraulic pisto pumps, Proceedigs of the Istitutio of Mechaical Egieers. Part I: Joural of Systems ad Cotrol Egieerig, vol.22,o.3,pp.32 33,27. [4] P. Achte, Dyamic high-frequecy behaviour of the swash plate i a variable displacemet axial pisto pump, Proceedigs of the Istitutio of Mechaical Egieers. Part I: Joural of Systems ad Cotrol Egieerig, vol.227,o.6,pp , 23. [5] H.Yamada,T.Yao,H.Wakiwakaetal., Developmetofhigh power liear pulse motor for artificial heart, i Proceedigs of the IEE Coferece Publicatio, vol. 34, pp. 4, Lodo, UK, 99. [6] T. X. Mei ad R. M. Goodall, Positio cotrol for a subsea pump system drive by a liear motor, Cotrol Egieerig Practice,vol.3,o.3,pp.3 3,995. [7] J. Z. Zhag ad T. N. Yag, Experimetal research o flow ad pressure variatio of liear motor drive reciprocatig pump, Oil Field Equipmet,vol.38,o.4,pp.56 6,29(Chiese). [8] Y. J. Hou, K. T. Cai, P. Z. Zhag et al., Research o motio characteristics of double-actio tri-liear motor reciprocatig pump, Oil Field Equipmet, vol. 8, pp.2 6, 29(Chiese). [9] W. Xiao, X. Zhou, Y. Gu, ad S. Zhag, Performace of liearmotor pumpig uit, Acta Petrolei Siica, vol. 27, o. 5, pp. 2 4, 26 (Chiese). [2] V. H. Vu ad M. Thomas, Ucertaities o modal parameters by operatioal modal aalysis, Mechaics ad Idustry,vol.5, o. 2, pp , 24. [2] D. Rad, B. C. Ellis, ad P. R. Prucal, Modal aalysis of semicoductor cylider fibers, IEEE Photoics Techology Letters,vol.8,o.,pp.3 33,26. [22] A. Miardo, A. Coscetta, S. Pirozzi, R. Berii, ad L. Zei, Experimetal modal aalysis of a alumium rectagular plate by use of the slope-assisted BOTDA method, Smart Materials ad Structures, vol. 22, o. 2, Article ID 2535, 23. [23] P. Aedre, Noise reductio of a axial pisto pump by meas of structural modificatio, The Hydraulikud Peumatik, vol. 48, o. 4, pp., 24. [24] R. Bricker, Some elemets of operatioal modal aalysis, Shock ad Vibratio,vol.24,ArticleID325839,pages,24.
Damped Vibration of a Non-prismatic Beam with a Rotational Spring
 Vibratios i Physical Systems Vol.6 (0) Damped Vibratio of a No-prismatic Beam with a Rotatioal Sprig Wojciech SOCHACK stitute of Mechaics ad Fudametals of Machiery Desig Uiversity of Techology, Czestochowa,
Vibratios i Physical Systems Vol.6 (0) Damped Vibratio of a No-prismatic Beam with a Rotatioal Sprig Wojciech SOCHACK stitute of Mechaics ad Fudametals of Machiery Desig Uiversity of Techology, Czestochowa,
Analysis of the No-Load Characteristic of the Moving Coil Linear Compressor
 Purdue Uiversity Purdue e-pubs Iteratioal Compressor Egieerig Coferece School of Mechaical Egieerig 008 Aalysis of the No-Load Characteristic of the Movig Coil Liear Compressor Yigbai Xie North Chia Electric
Purdue Uiversity Purdue e-pubs Iteratioal Compressor Egieerig Coferece School of Mechaical Egieerig 008 Aalysis of the No-Load Characteristic of the Movig Coil Liear Compressor Yigbai Xie North Chia Electric
Principle Of Superposition
 ecture 5: PREIMINRY CONCEP O RUCUR NYI Priciple Of uperpositio Mathematically, the priciple of superpositio is stated as ( a ) G( a ) G( ) G a a or for a liear structural system, the respose at a give
ecture 5: PREIMINRY CONCEP O RUCUR NYI Priciple Of uperpositio Mathematically, the priciple of superpositio is stated as ( a ) G( a ) G( ) G a a or for a liear structural system, the respose at a give
EXPERIMENT OF SIMPLE VIBRATION
 EXPERIMENT OF SIMPLE VIBRATION. PURPOSE The purpose of the experimet is to show free vibratio ad damped vibratio o a system havig oe degree of freedom ad to ivestigate the relatioship betwee the basic
EXPERIMENT OF SIMPLE VIBRATION. PURPOSE The purpose of the experimet is to show free vibratio ad damped vibratio o a system havig oe degree of freedom ad to ivestigate the relatioship betwee the basic
PILOT STUDY ON THE HORIZONTAL SHEAR BEHAVIOUR OF FRP RUBBER ISOLATORS
 Asia-Pacific Coferece o FRP i Structures (APFIS 2007) S.T. Smith (ed) 2007 Iteratioal Istitute for FRP i Costructio PILOT STUDY ON THE HORIZONTAL SHEAR BEHAVIOUR OF FRP RUBBER ISOLATORS T.B. Peg *, J.Z.
Asia-Pacific Coferece o FRP i Structures (APFIS 2007) S.T. Smith (ed) 2007 Iteratioal Istitute for FRP i Costructio PILOT STUDY ON THE HORIZONTAL SHEAR BEHAVIOUR OF FRP RUBBER ISOLATORS T.B. Peg *, J.Z.
Research Article Health Monitoring for a Structure Using Its Nonstationary Vibration
 Hidawi Publishig Corporatio Advaces i Acoustics ad Vibratio Volume 2, Article ID 69652, 5 pages doi:.55/2/69652 Research Article Health Moitorig for a Structure Usig Its Nostatioary Vibratio Yoshimutsu
Hidawi Publishig Corporatio Advaces i Acoustics ad Vibratio Volume 2, Article ID 69652, 5 pages doi:.55/2/69652 Research Article Health Moitorig for a Structure Usig Its Nostatioary Vibratio Yoshimutsu
Direction of Arrival Estimation Method in Underdetermined Condition Zhang Youzhi a, Li Weibo b, Wang Hanli c
 4th Iteratioal Coferece o Advaced Materials ad Iformatio Techology Processig (AMITP 06) Directio of Arrival Estimatio Method i Uderdetermied Coditio Zhag Youzhi a, Li eibo b, ag Hali c Naval Aeroautical
4th Iteratioal Coferece o Advaced Materials ad Iformatio Techology Processig (AMITP 06) Directio of Arrival Estimatio Method i Uderdetermied Coditio Zhag Youzhi a, Li eibo b, ag Hali c Naval Aeroautical
The Mathematical Model and the Simulation Modelling Algoritm of the Multitiered Mechanical System
 The Mathematical Model ad the Simulatio Modellig Algoritm of the Multitiered Mechaical System Demi Aatoliy, Kovalev Iva Dept. of Optical Digital Systems ad Techologies, The St. Petersburg Natioal Research
The Mathematical Model ad the Simulatio Modellig Algoritm of the Multitiered Mechaical System Demi Aatoliy, Kovalev Iva Dept. of Optical Digital Systems ad Techologies, The St. Petersburg Natioal Research
Orthogonal Gaussian Filters for Signal Processing
 Orthogoal Gaussia Filters for Sigal Processig Mark Mackezie ad Kiet Tieu Mechaical Egieerig Uiversity of Wollogog.S.W. Australia Abstract A Gaussia filter usig the Hermite orthoormal series of fuctios
Orthogoal Gaussia Filters for Sigal Processig Mark Mackezie ad Kiet Tieu Mechaical Egieerig Uiversity of Wollogog.S.W. Australia Abstract A Gaussia filter usig the Hermite orthoormal series of fuctios
Research Article Health Monitoring for a Structure Using Its Nonstationary Vibration
 Advaces i Acoustics ad Vibratio Volume 2, Article ID 69652, 5 pages doi:.55/2/69652 Research Article Health Moitorig for a Structure Usig Its Nostatioary Vibratio Yoshimutsu Hirata, Mikio Tohyama, Mitsuo
Advaces i Acoustics ad Vibratio Volume 2, Article ID 69652, 5 pages doi:.55/2/69652 Research Article Health Moitorig for a Structure Usig Its Nostatioary Vibratio Yoshimutsu Hirata, Mikio Tohyama, Mitsuo
Analysis of composites with multiple rigid-line reinforcements by the BEM
 Aalysis of composites with multiple rigid-lie reiforcemets by the BEM Piotr Fedeliski* Departmet of Stregth of Materials ad Computatioal Mechaics, Silesia Uiversity of Techology ul. Koarskiego 18A, 44-100
Aalysis of composites with multiple rigid-lie reiforcemets by the BEM Piotr Fedeliski* Departmet of Stregth of Materials ad Computatioal Mechaics, Silesia Uiversity of Techology ul. Koarskiego 18A, 44-100
A STUDY OF VIBRATION MEASURING AND FATIGUE ANALYSIS FOR CANTILEVER BEAMS
 Joural of Techology, Vol. 3, No., pp. 47-56 (07) 47, * LabView ANSYS A STUDY OF VIBRATION MEASURING AND FATIGUE ANALYSIS FOR CANTILEVER BEAMS Yuo-Ter Tsai, * Hsie-Yag Li Departmet of Mechaical Egieerig
Joural of Techology, Vol. 3, No., pp. 47-56 (07) 47, * LabView ANSYS A STUDY OF VIBRATION MEASURING AND FATIGUE ANALYSIS FOR CANTILEVER BEAMS Yuo-Ter Tsai, * Hsie-Yag Li Departmet of Mechaical Egieerig
Research on real time compensation of thermal errors of CNC lathe based on linear regression theory Qiu Yongliang
 d Iteratioal Coferece o Machiery, Materials Egieerig, Chemical Egieerig ad Biotechology (MMECEB 015) Research o real time compesatio of thermal errors of CNC lathe based o liear regressio theory Qiu Yogliag
d Iteratioal Coferece o Machiery, Materials Egieerig, Chemical Egieerig ad Biotechology (MMECEB 015) Research o real time compesatio of thermal errors of CNC lathe based o liear regressio theory Qiu Yogliag
Mechatronics. Time Response & Frequency Response 2 nd -Order Dynamic System 2-Pole, Low-Pass, Active Filter
 Time Respose & Frequecy Respose d -Order Dyamic System -Pole, Low-Pass, Active Filter R 4 R 7 C 5 e i R 1 C R 3 - + R 6 - + e out Assigmet: Perform a Complete Dyamic System Ivestigatio of the Two-Pole,
Time Respose & Frequecy Respose d -Order Dyamic System -Pole, Low-Pass, Active Filter R 4 R 7 C 5 e i R 1 C R 3 - + R 6 - + e out Assigmet: Perform a Complete Dyamic System Ivestigatio of the Two-Pole,
577. Estimation of surface roughness using high frequency vibrations
 577. Estimatio of surface roughess usig high frequecy vibratios V. Augutis, M. Sauoris, Kauas Uiversity of Techology Electroics ad Measuremets Systems Departmet Studetu str. 5-443, LT-5368 Kauas, Lithuaia
577. Estimatio of surface roughess usig high frequecy vibratios V. Augutis, M. Sauoris, Kauas Uiversity of Techology Electroics ad Measuremets Systems Departmet Studetu str. 5-443, LT-5368 Kauas, Lithuaia
2C09 Design for seismic and climate changes
 2C09 Desig for seismic ad climate chages Lecture 02: Dyamic respose of sigle-degree-of-freedom systems I Daiel Grecea, Politehica Uiversity of Timisoara 10/03/2014 Europea Erasmus Mudus Master Course Sustaiable
2C09 Desig for seismic ad climate chages Lecture 02: Dyamic respose of sigle-degree-of-freedom systems I Daiel Grecea, Politehica Uiversity of Timisoara 10/03/2014 Europea Erasmus Mudus Master Course Sustaiable
Study on Coal Consumption Curve Fitting of the Thermal Power Based on Genetic Algorithm
 Joural of ad Eergy Egieerig, 05, 3, 43-437 Published Olie April 05 i SciRes. http://www.scirp.org/joural/jpee http://dx.doi.org/0.436/jpee.05.34058 Study o Coal Cosumptio Curve Fittig of the Thermal Based
Joural of ad Eergy Egieerig, 05, 3, 43-437 Published Olie April 05 i SciRes. http://www.scirp.org/joural/jpee http://dx.doi.org/0.436/jpee.05.34058 Study o Coal Cosumptio Curve Fittig of the Thermal Based
SOLID MECHANICS TUTORIAL BALANCING OF RECIPROCATING MACHINERY
 SOLID MECHANICS TUTORIAL BALANCING OF RECIPROCATING MACHINERY This work covers elemets of the syllabus for the Egieerig Coucil Exam D5 Dyamics of Mechaical Systems. O completio of this tutorial you should
SOLID MECHANICS TUTORIAL BALANCING OF RECIPROCATING MACHINERY This work covers elemets of the syllabus for the Egieerig Coucil Exam D5 Dyamics of Mechaical Systems. O completio of this tutorial you should
CEE 522 Autumn Uncertainty Concepts for Geotechnical Engineering
 CEE 5 Autum 005 Ucertaity Cocepts for Geotechical Egieerig Basic Termiology Set A set is a collectio of (mutually exclusive) objects or evets. The sample space is the (collectively exhaustive) collectio
CEE 5 Autum 005 Ucertaity Cocepts for Geotechical Egieerig Basic Termiology Set A set is a collectio of (mutually exclusive) objects or evets. The sample space is the (collectively exhaustive) collectio
Dynamic Instability of Taut Mooring Lines Subjected to Bi-frequency Parametric Excitation
 Proceedigs of the 1 th Iteratioal Coferece o the Stability of Ships ad Ocea Vehicles, 14-19 Jue 15, Glasgow, UK. Dyamic Istability of Taut Moorig Lies Subjected to Bi-frequecy Parametric Excitatio Aiju
Proceedigs of the 1 th Iteratioal Coferece o the Stability of Ships ad Ocea Vehicles, 14-19 Jue 15, Glasgow, UK. Dyamic Istability of Taut Moorig Lies Subjected to Bi-frequecy Parametric Excitatio Aiju
OBJECTIVES. Chapter 1 INTRODUCTION TO INSTRUMENTATION FUNCTION AND ADVANTAGES INTRODUCTION. At the end of this chapter, students should be able to:
 OBJECTIVES Chapter 1 INTRODUCTION TO INSTRUMENTATION At the ed of this chapter, studets should be able to: 1. Explai the static ad dyamic characteristics of a istrumet. 2. Calculate ad aalyze the measuremet
OBJECTIVES Chapter 1 INTRODUCTION TO INSTRUMENTATION At the ed of this chapter, studets should be able to: 1. Explai the static ad dyamic characteristics of a istrumet. 2. Calculate ad aalyze the measuremet
2.004 Dynamics and Control II Spring 2008
 MIT OpeCourseWare http://ocw.mit.edu 2.004 Dyamics ad Cotrol II Sprig 2008 For iformatio about citig these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts Istitute of Techology
MIT OpeCourseWare http://ocw.mit.edu 2.004 Dyamics ad Cotrol II Sprig 2008 For iformatio about citig these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts Istitute of Techology
Using Spreadsheets as a Computational Tool in Teaching Mechanical. Engineering
 Proceedigs of the th WSEAS Iteratioal Coferece o COMPUTERS, Vouliagmei, Athes, Greece, July 3-5, 6 (pp35-3) Usig Spreadsheets as a Computatioal Tool i Teachig Mechaical Egieerig AHMADI-BROOGHANI, ZAHRA
Proceedigs of the th WSEAS Iteratioal Coferece o COMPUTERS, Vouliagmei, Athes, Greece, July 3-5, 6 (pp35-3) Usig Spreadsheets as a Computatioal Tool i Teachig Mechaical Egieerig AHMADI-BROOGHANI, ZAHRA
MONITORING THE STABILITY OF SLOPES BY GPS
 MONITORING THE STABILITY OF SLOPES BY GPS Prof. S. Sakurai Costructio Egieerig Research Istitute Foudatio, Japa Prof. N. Shimizu Dept. of Civil Egieerig, Yamaguchi Uiversity, Japa ABSTRACT The stability
MONITORING THE STABILITY OF SLOPES BY GPS Prof. S. Sakurai Costructio Egieerig Research Istitute Foudatio, Japa Prof. N. Shimizu Dept. of Civil Egieerig, Yamaguchi Uiversity, Japa ABSTRACT The stability
567. Research of Dynamics of a Vibration Isolation Platform
 567. Research of Dyamics of a Vibratio Isolatio Platform A. Kilikevičius, M. Jurevičius 2, M. Berba 3 Vilius Gedimias Techical Uiversity, Departmet of Machie buildig, J. Basaavičiaus str. 28, LT-03224
567. Research of Dyamics of a Vibratio Isolatio Platform A. Kilikevičius, M. Jurevičius 2, M. Berba 3 Vilius Gedimias Techical Uiversity, Departmet of Machie buildig, J. Basaavičiaus str. 28, LT-03224
MATHEMATICAL MODELLING OF ARCH FORMATION IN GRANULAR MATERIALS
 6 th INTERNATIONAL MULTIDISCIPLINARY CONFERENCE MATHEMATICAL MODELLING OF ARCH FORMATION IN GRANULAR MATERIALS Istva eppler SZIE Faculty of Mechaics, H-2103 Gödöllő Páter. 1., Hugary Abstract: The mathematical
6 th INTERNATIONAL MULTIDISCIPLINARY CONFERENCE MATHEMATICAL MODELLING OF ARCH FORMATION IN GRANULAR MATERIALS Istva eppler SZIE Faculty of Mechaics, H-2103 Gödöllő Páter. 1., Hugary Abstract: The mathematical
AN OPEN-PLUS-CLOSED-LOOP APPROACH TO SYNCHRONIZATION OF CHAOTIC AND HYPERCHAOTIC MAPS
 http://www.paper.edu.c Iteratioal Joural of Bifurcatio ad Chaos, Vol. 1, No. 5 () 119 15 c World Scietific Publishig Compay AN OPEN-PLUS-CLOSED-LOOP APPROACH TO SYNCHRONIZATION OF CHAOTIC AND HYPERCHAOTIC
http://www.paper.edu.c Iteratioal Joural of Bifurcatio ad Chaos, Vol. 1, No. 5 () 119 15 c World Scietific Publishig Compay AN OPEN-PLUS-CLOSED-LOOP APPROACH TO SYNCHRONIZATION OF CHAOTIC AND HYPERCHAOTIC
TESTING OF THE FORCES IN CABLE OF SUSPENSION STRUCTURE AND BRIDGES
 TSTING OF TH FORCS IN CABL OF SUSPNSION STRUCTUR AND BRIDGS Zhou, M. 1, Liu, Z. ad Liu, J. 1 College of the Muicipal Techology, Guagzhou Uiversity, Guagzhou. Guagzhou Muicipal ad Ladscape gieerig Quality
TSTING OF TH FORCS IN CABL OF SUSPNSION STRUCTUR AND BRIDGS Zhou, M. 1, Liu, Z. ad Liu, J. 1 College of the Muicipal Techology, Guagzhou Uiversity, Guagzhou. Guagzhou Muicipal ad Ladscape gieerig Quality
CENTRIFUGAL PUMP SPECIFIC SPEED PRIMER AND THE AFFINITY LAWS Jacques Chaurette p. eng., Fluide Design Inc. November 2004
 CENTRIFUGAL PUMP SPECIFIC SPEE PRIMER AN THE AFFINITY LAWS Jacques Chaurette p. eg., Fluide esig Ic. November 004 www.fluidedesig.com There is a umber called the specific speed of a pump whose value tells
CENTRIFUGAL PUMP SPECIFIC SPEE PRIMER AN THE AFFINITY LAWS Jacques Chaurette p. eg., Fluide esig Ic. November 004 www.fluidedesig.com There is a umber called the specific speed of a pump whose value tells
Added mass estimation of open flat membranes vibrating in still air
 Added mass estimatio of ope flat membraes vibratig i still air *Yua-qi Li 1),Yi Zhou ), Akihito YOHIDA 3) ad Yukio TAMURA 4) 1), ) Departmet of Buildig Egieerig, Togji Uiversity, haghai, 9, Chia 1) liyq@togji.edu.c
Added mass estimatio of ope flat membraes vibratig i still air *Yua-qi Li 1),Yi Zhou ), Akihito YOHIDA 3) ad Yukio TAMURA 4) 1), ) Departmet of Buildig Egieerig, Togji Uiversity, haghai, 9, Chia 1) liyq@togji.edu.c
Olli Simula T / Chapter 1 3. Olli Simula T / Chapter 1 5
 Sigals ad Systems Sigals ad Systems Sigals are variables that carry iformatio Systemstake sigals as iputs ad produce sigals as outputs The course deals with the passage of sigals through systems T-6.4
Sigals ad Systems Sigals ad Systems Sigals are variables that carry iformatio Systemstake sigals as iputs ad produce sigals as outputs The course deals with the passage of sigals through systems T-6.4
CUMULATIVE DAMAGE ESTIMATION USING WAVELET TRANSFORM OF STRUCTURAL RESPONSE
 CUMULATIVE DAMAGE ESTIMATION USING WAVELET TRANSFORM OF STRUCTURAL RESPONSE Ryutaro SEGAWA 1, Shizuo YAMAMOTO, Akira SONE 3 Ad Arata MASUDA 4 SUMMARY Durig a strog earthquake, the respose of a structure
CUMULATIVE DAMAGE ESTIMATION USING WAVELET TRANSFORM OF STRUCTURAL RESPONSE Ryutaro SEGAWA 1, Shizuo YAMAMOTO, Akira SONE 3 Ad Arata MASUDA 4 SUMMARY Durig a strog earthquake, the respose of a structure
EE / EEE SAMPLE STUDY MATERIAL. GATE, IES & PSUs Signal System. Electrical Engineering. Postal Correspondence Course
 Sigal-EE Postal Correspodece Course 1 SAMPLE STUDY MATERIAL Electrical Egieerig EE / EEE Postal Correspodece Course GATE, IES & PSUs Sigal System Sigal-EE Postal Correspodece Course CONTENTS 1. SIGNAL
Sigal-EE Postal Correspodece Course 1 SAMPLE STUDY MATERIAL Electrical Egieerig EE / EEE Postal Correspodece Course GATE, IES & PSUs Sigal System Sigal-EE Postal Correspodece Course CONTENTS 1. SIGNAL
Problem 1. Problem Engineering Dynamics Problem Set 9--Solution. Find the equation of motion for the system shown with respect to:
 2.003 Egieerig Dyamics Problem Set 9--Solutio Problem 1 Fid the equatio of motio for the system show with respect to: a) Zero sprig force positio. Draw the appropriate free body diagram. b) Static equilibrium
2.003 Egieerig Dyamics Problem Set 9--Solutio Problem 1 Fid the equatio of motio for the system show with respect to: a) Zero sprig force positio. Draw the appropriate free body diagram. b) Static equilibrium
Microscopic traffic flow modeling
 Chapter 34 Microscopic traffic flow modelig 34.1 Overview Macroscopic modelig looks at traffic flow from a global perspective, whereas microscopic modelig, as the term suggests, gives attetio to the details
Chapter 34 Microscopic traffic flow modelig 34.1 Overview Macroscopic modelig looks at traffic flow from a global perspective, whereas microscopic modelig, as the term suggests, gives attetio to the details
Probability, Expectation Value and Uncertainty
 Chapter 1 Probability, Expectatio Value ad Ucertaity We have see that the physically observable properties of a quatum system are represeted by Hermitea operators (also referred to as observables ) such
Chapter 1 Probability, Expectatio Value ad Ucertaity We have see that the physically observable properties of a quatum system are represeted by Hermitea operators (also referred to as observables ) such
NEW IDENTIFICATION AND CONTROL METHODS OF SINE-FUNCTION JULIA SETS
 Joural of Applied Aalysis ad Computatio Volume 5, Number 2, May 25, 22 23 Website:http://jaac-olie.com/ doi:.948/252 NEW IDENTIFICATION AND CONTROL METHODS OF SINE-FUNCTION JULIA SETS Jie Su,2, Wei Qiao
Joural of Applied Aalysis ad Computatio Volume 5, Number 2, May 25, 22 23 Website:http://jaac-olie.com/ doi:.948/252 NEW IDENTIFICATION AND CONTROL METHODS OF SINE-FUNCTION JULIA SETS Jie Su,2, Wei Qiao
Comparison Study of Series Approximation. and Convergence between Chebyshev. and Legendre Series
 Applied Mathematical Scieces, Vol. 7, 03, o. 6, 3-337 HIKARI Ltd, www.m-hikari.com http://d.doi.org/0.988/ams.03.3430 Compariso Study of Series Approimatio ad Covergece betwee Chebyshev ad Legedre Series
Applied Mathematical Scieces, Vol. 7, 03, o. 6, 3-337 HIKARI Ltd, www.m-hikari.com http://d.doi.org/0.988/ams.03.3430 Compariso Study of Series Approimatio ad Covergece betwee Chebyshev ad Legedre Series
Appendix: The Laplace Transform
 Appedix: The Laplace Trasform The Laplace trasform is a powerful method that ca be used to solve differetial equatio, ad other mathematical problems. Its stregth lies i the fact that it allows the trasformatio
Appedix: The Laplace Trasform The Laplace trasform is a powerful method that ca be used to solve differetial equatio, ad other mathematical problems. Its stregth lies i the fact that it allows the trasformatio
Numerical Simulation of Thermomechanical Problems in Applied Mechanics: Application to Solidification Problem
 Leoardo Joural of Scieces ISSN 1583-0233 Issue 9, July-December 2006 p. 25-32 Numerical Simulatio of Thermomechaical Problems i Applied Mechaics: Applicatio to Solidificatio Problem Vicet Obiajulu OGWUAGWU
Leoardo Joural of Scieces ISSN 1583-0233 Issue 9, July-December 2006 p. 25-32 Numerical Simulatio of Thermomechaical Problems i Applied Mechaics: Applicatio to Solidificatio Problem Vicet Obiajulu OGWUAGWU
Vibratory Motion. Prof. Zheng-yi Feng NCHU SWC. National CHung Hsing University, Department of Soil and Water Conservation
 Vibratory Motio Prof. Zheg-yi Feg NCHU SWC 1 Types of vibratory motio Periodic motio Noperiodic motio See Fig. A1, p.58 Harmoic motio Periodic motio Trasiet motio impact Trasiet motio earthquake A powerful
Vibratory Motio Prof. Zheg-yi Feg NCHU SWC 1 Types of vibratory motio Periodic motio Noperiodic motio See Fig. A1, p.58 Harmoic motio Periodic motio Trasiet motio impact Trasiet motio earthquake A powerful
Design of distribution transformer loss meter considering the harmonic loss based on one side measurement method
 3rd Iteratioal Coferece o Machiery, Materials ad Iformatio Techology Applicatios (ICMMITA 05) Desig of distributio trasformer loss meter cosiderig the harmoic loss based o oe side measuremet method HU
3rd Iteratioal Coferece o Machiery, Materials ad Iformatio Techology Applicatios (ICMMITA 05) Desig of distributio trasformer loss meter cosiderig the harmoic loss based o oe side measuremet method HU
Dynamic Balancing Simulation Based on Virtual Prototyping Technology
 Dyamic Balacig Simulatio Based o Virtual Prototypig Techology Tia Ha, Jie Bai ad Zhog-ju Yi School of Mechaical Egieerig, Uiersity of Sciece ad Techology Beijig Beijig, Chia hatia@meustbeduc, yizhogju@meustbeduc
Dyamic Balacig Simulatio Based o Virtual Prototypig Techology Tia Ha, Jie Bai ad Zhog-ju Yi School of Mechaical Egieerig, Uiersity of Sciece ad Techology Beijig Beijig, Chia hatia@meustbeduc, yizhogju@meustbeduc
Mathematical Modeling of Optimum 3 Step Stress Accelerated Life Testing for Generalized Pareto Distribution
 America Joural of Theoretical ad Applied Statistics 05; 4(: 6-69 Published olie May 8, 05 (http://www.sciecepublishiggroup.com/j/ajtas doi: 0.648/j.ajtas.05040. ISSN: 6-8999 (Prit; ISSN: 6-9006 (Olie Mathematical
America Joural of Theoretical ad Applied Statistics 05; 4(: 6-69 Published olie May 8, 05 (http://www.sciecepublishiggroup.com/j/ajtas doi: 0.648/j.ajtas.05040. ISSN: 6-8999 (Prit; ISSN: 6-9006 (Olie Mathematical
Live Line Measuring the Parameters of 220 kv Transmission Lines with Mutual Inductance in Hainan Power Grid
 Egieerig, 213, 5, 146-151 doi:1.4236/eg.213.51b27 Published Olie Jauary 213 (http://www.scirp.org/joural/eg) Live Lie Measurig the Parameters of 22 kv Trasmissio Lies with Mutual Iductace i Haia Power
Egieerig, 213, 5, 146-151 doi:1.4236/eg.213.51b27 Published Olie Jauary 213 (http://www.scirp.org/joural/eg) Live Lie Measurig the Parameters of 22 kv Trasmissio Lies with Mutual Iductace i Haia Power
UNDERWATER OBJECT CLASSIFICATION BY MEANS OF AN ACOUSTIC METHOD EUGENIUSZ KOZACZKA
 UNDERWATER OBJECT CLASSIFICATION BY MEANS OF AN ACOUSTIC METHOD EUGENIUSZ KOZACZKA Naval Uiversity of Gdyia 81-13 Gdyia, Śmidowicza 69, Polad Gdańsk Uiversity of Techology 8-95 Gdańsk, Narutowicza 11/1,
UNDERWATER OBJECT CLASSIFICATION BY MEANS OF AN ACOUSTIC METHOD EUGENIUSZ KOZACZKA Naval Uiversity of Gdyia 81-13 Gdyia, Śmidowicza 69, Polad Gdańsk Uiversity of Techology 8-95 Gdańsk, Narutowicza 11/1,
2C09 Design for seismic and climate changes
 C9 Desig for seismic ad climate chages Lecture 3: Dyamic respose of sigle-degree-of-freedom systems II Daiel Grecea, Politehica Uiversity of Timisoara 11/3/14 Europea Erasmus Mudus Master Course Sustaiable
C9 Desig for seismic ad climate chages Lecture 3: Dyamic respose of sigle-degree-of-freedom systems II Daiel Grecea, Politehica Uiversity of Timisoara 11/3/14 Europea Erasmus Mudus Master Course Sustaiable
Research On the Application of Optimal Control Theory On Parameters Optimization of Vehicle Suspension
 JOURNAL OF LOW FREQUENCY NOISE, VIBRAION AND ACIVE CONROL Pages 53 63 Research O the Applicatio of Optimal Cotrol heory O Parameters Optimizatio of Vehicle Suspesio She Yogju Liu Xiadog Yag Shaopu 3 (
JOURNAL OF LOW FREQUENCY NOISE, VIBRAION AND ACIVE CONROL Pages 53 63 Research O the Applicatio of Optimal Cotrol heory O Parameters Optimizatio of Vehicle Suspesio She Yogju Liu Xiadog Yag Shaopu 3 (
CALCULATION IN THE FIELD OF SEGMENTAL ROTOR MACHINES TAKING INTO ACCOUNT WINDING HARMONICS AND ROTOR AIRGAP IRREGULARITIES
 CLCULTION IN THE FIELD OF SEGENTL OTO CHINES TKING INTO CCOUNT WINDING HONICS ND OTO IGP IEGULITIES Y STCT The stator mmf over a segmet of the segmetal rotor reluctace machie is treated as a ifiite array
CLCULTION IN THE FIELD OF SEGENTL OTO CHINES TKING INTO CCOUNT WINDING HONICS ND OTO IGP IEGULITIES Y STCT The stator mmf over a segmet of the segmetal rotor reluctace machie is treated as a ifiite array
[ ] sin ( ) ( ) = 2 2 ( ) ( ) ( ) ˆ Mechanical Spectroscopy II
![[ ] sin ( ) ( ) = 2 2 ( ) ( ) ( ) ˆ Mechanical Spectroscopy II](/thumbs/72/66401300.jpg "[ ] sin ( ) ( ) = 2 2 ( ) ( ) ( ) ˆ Mechanical Spectroscopy II") Solid State Pheomea Vol. 89 (003) pp 343-348 (003) Tras Tech Publicatios, Switzerlad doi:0.408/www.scietific.et/ssp.89.343 A New Impulse Mechaical Spectrometer to Study the Dyamic Mechaical Properties
Solid State Pheomea Vol. 89 (003) pp 343-348 (003) Tras Tech Publicatios, Switzerlad doi:0.408/www.scietific.et/ssp.89.343 A New Impulse Mechaical Spectrometer to Study the Dyamic Mechaical Properties
Research Article A Unified Weight Formula for Calculating the Sample Variance from Weighted Successive Differences
 Discrete Dyamics i Nature ad Society Article ID 210761 4 pages http://dxdoiorg/101155/2014/210761 Research Article A Uified Weight Formula for Calculatig the Sample Variace from Weighted Successive Differeces
Discrete Dyamics i Nature ad Society Article ID 210761 4 pages http://dxdoiorg/101155/2014/210761 Research Article A Uified Weight Formula for Calculatig the Sample Variace from Weighted Successive Differeces
DYNAMIC ANALYSIS OF BEAM-LIKE STRUCTURES SUBJECT TO MOVING LOADS
 DYNAMIC ANALYSIS OF BEAM-LIKE STRUCTURES SUBJECT TO MOVING LOADS Ivaa Štimac 1, Ivica Kožar 1 M.Sc,Assistat, Ph.D. Professor 1, Faculty of Civil Egieerig, Uiverity of Rieka, Croatia INTRODUCTION The vehicle-iduced
DYNAMIC ANALYSIS OF BEAM-LIKE STRUCTURES SUBJECT TO MOVING LOADS Ivaa Štimac 1, Ivica Kožar 1 M.Sc,Assistat, Ph.D. Professor 1, Faculty of Civil Egieerig, Uiverity of Rieka, Croatia INTRODUCTION The vehicle-iduced
POD-Based Analysis of Dynamic Wind Load Effects on a Large Span Roof
 POD-Based Aalysis of Dyamic Wid Load Effects o a Large Spa Roof Xi-yag Ji, Yi Tag ad Hai Ji 3 Professor, Wid Egieerig Research Ceter, Chia Academy of Buildig Research, Beiig 3, Chia, ixiyag@cabrtech.com
POD-Based Aalysis of Dyamic Wid Load Effects o a Large Spa Roof Xi-yag Ji, Yi Tag ad Hai Ji 3 Professor, Wid Egieerig Research Ceter, Chia Academy of Buildig Research, Beiig 3, Chia, ixiyag@cabrtech.com
Chapter 2 Feedback Control Theory Continued
 Chapter Feedback Cotrol Theor Cotiued. Itroductio I the previous chapter, the respose characteristic of simple first ad secod order trasfer fuctios were studied. It was show that first order trasfer fuctio,
Chapter Feedback Cotrol Theor Cotiued. Itroductio I the previous chapter, the respose characteristic of simple first ad secod order trasfer fuctios were studied. It was show that first order trasfer fuctio,
PROPOSING INPUT-DEPENDENT MODE CONTRIBUTION FACTORS FOR SIMPLIFIED SEISMIC RESPONSE ANALYSIS OF BUILDING SYSTEMS
 he 4 th World Coferece o Earthquake Egieerig October -7, 008, Beiig, Chia PROPOSING INPU-DEPENDEN ODE CONRIBUION FACORS FOR SIPLIFIED SEISIC RESPONSE ANALYSIS OF BUILDING SYSES ahmood Hosseii ad Laya Abbasi
he 4 th World Coferece o Earthquake Egieerig October -7, 008, Beiig, Chia PROPOSING INPU-DEPENDEN ODE CONRIBUION FACORS FOR SIPLIFIED SEISIC RESPONSE ANALYSIS OF BUILDING SYSES ahmood Hosseii ad Laya Abbasi
Stopping oscillations of a simple harmonic oscillator using an impulse force
 It. J. Adv. Appl. Math. ad Mech. 5() (207) 6 (ISSN: 2347-2529) IJAAMM Joural homepage: www.ijaamm.com Iteratioal Joural of Advaces i Applied Mathematics ad Mechaics Stoppig oscillatios of a simple harmoic
It. J. Adv. Appl. Math. ad Mech. 5() (207) 6 (ISSN: 2347-2529) IJAAMM Joural homepage: www.ijaamm.com Iteratioal Joural of Advaces i Applied Mathematics ad Mechaics Stoppig oscillatios of a simple harmoic
Senvion SE Franz-Lenz-Str. 1, Osnabrück, Germany
 Iteratioal Wid Egieerig Coferece IWEC 014 WAVE INDUCED FATIGUE LOADS ON MONOPILES - NEW APPROACHES FOR LUMPING OF SCATTER TABLES AND SITE SPECIFIC INTERPOLATION OF FATIGUE LOADS M. SEIDEL Sevio SE Fraz-Lez-Str.
Iteratioal Wid Egieerig Coferece IWEC 014 WAVE INDUCED FATIGUE LOADS ON MONOPILES - NEW APPROACHES FOR LUMPING OF SCATTER TABLES AND SITE SPECIFIC INTERPOLATION OF FATIGUE LOADS M. SEIDEL Sevio SE Fraz-Lez-Str.
LOSS-MINIMIZATION CONTROL OF SCALAR- CONTROLLED INDUCTION MOTOR DRIVES
 LOSS-MINIMIZATION CONTROL OF SCALAR- CONTROLLED INDUCTION MOTOR DRIVES Hussei Sarha, Rateb Al-Issa, ad Qazem Jaber Departmet of Mechatroics Egieerig, Faculty of Egieerig Techology Al-Balqa Applied Uiversity,
LOSS-MINIMIZATION CONTROL OF SCALAR- CONTROLLED INDUCTION MOTOR DRIVES Hussei Sarha, Rateb Al-Issa, ad Qazem Jaber Departmet of Mechatroics Egieerig, Faculty of Egieerig Techology Al-Balqa Applied Uiversity,
THE SYSTEMATIC AND THE RANDOM. ERRORS - DUE TO ELEMENT TOLERANCES OF ELECTRICAL NETWORKS
 R775 Philips Res. Repts 26,414-423, 1971' THE SYSTEMATIC AND THE RANDOM. ERRORS - DUE TO ELEMENT TOLERANCES OF ELECTRICAL NETWORKS by H. W. HANNEMAN Abstract Usig the law of propagatio of errors, approximated
R775 Philips Res. Repts 26,414-423, 1971' THE SYSTEMATIC AND THE RANDOM. ERRORS - DUE TO ELEMENT TOLERANCES OF ELECTRICAL NETWORKS by H. W. HANNEMAN Abstract Usig the law of propagatio of errors, approximated
Research Article A New Second-Order Iteration Method for Solving Nonlinear Equations
 Abstract ad Applied Aalysis Volume 2013, Article ID 487062, 4 pages http://dx.doi.org/10.1155/2013/487062 Research Article A New Secod-Order Iteratio Method for Solvig Noliear Equatios Shi Mi Kag, 1 Arif
Abstract ad Applied Aalysis Volume 2013, Article ID 487062, 4 pages http://dx.doi.org/10.1155/2013/487062 Research Article A New Secod-Order Iteratio Method for Solvig Noliear Equatios Shi Mi Kag, 1 Arif
THE SEISMIC RESPONSE CHARACTERISTICS OF A NEW STRUCTURAL CONFIGURATION
 THE SEISMIC RESPONSE CHARACTERISTICS OF A NEW STRUCTURAL CONFIGURATION u a Zhag 1 iagu Qi ad Shel Cherry 3 1 Professor, Departmet of Civil Egieerig, Northwester Polytechical Uiversity, i a, Chia. PhD Studet,
THE SEISMIC RESPONSE CHARACTERISTICS OF A NEW STRUCTURAL CONFIGURATION u a Zhag 1 iagu Qi ad Shel Cherry 3 1 Professor, Departmet of Civil Egieerig, Northwester Polytechical Uiversity, i a, Chia. PhD Studet,
Temperature Distribution in a Cylindrical Core and Coil Assembly with Heat Generation
 Temperature Distributio i a Cylidrical Core ad Coil Assembly with Heat Geeratio P. S. Yeh, Ph.D. Abstract A residetial distributio trasformer cosists of a cylidrical steel tak ad a core-ad-coil assembly
Temperature Distributio i a Cylidrical Core ad Coil Assembly with Heat Geeratio P. S. Yeh, Ph.D. Abstract A residetial distributio trasformer cosists of a cylidrical steel tak ad a core-ad-coil assembly
MATHEMATICS. The assessment objectives of the Compulsory Part are to test the candidates :
 MATHEMATICS INTRODUCTION The public assessmet of this subject is based o the Curriculum ad Assessmet Guide (Secodary 4 6) Mathematics joitly prepared by the Curriculum Developmet Coucil ad the Hog Kog
MATHEMATICS INTRODUCTION The public assessmet of this subject is based o the Curriculum ad Assessmet Guide (Secodary 4 6) Mathematics joitly prepared by the Curriculum Developmet Coucil ad the Hog Kog
A Study on the Linear Piezoelectric Motor of Mode Shape
 Ope Joural of Acoustics, 015, 5, 153-171 Published Olie December 015 i SciRes. http://www.scirp.org/joural/oja http://dx.doi.org/10.436/oja.015.54013 A Study o the Liear Piezoelectric Motor of Mode Shape
Ope Joural of Acoustics, 015, 5, 153-171 Published Olie December 015 i SciRes. http://www.scirp.org/joural/oja http://dx.doi.org/10.436/oja.015.54013 A Study o the Liear Piezoelectric Motor of Mode Shape
CHAPTER NINE. Frequency Response Methods
 CHAPTER NINE 9. Itroductio It as poited earlier that i practice the performace of a feedback cotrol system is more preferably measured by its time - domai respose characteristics. This is i cotrast to
CHAPTER NINE 9. Itroductio It as poited earlier that i practice the performace of a feedback cotrol system is more preferably measured by its time - domai respose characteristics. This is i cotrast to
Signal Processing in Mechatronics
 Sigal Processig i Mechatroics Zhu K.P. AIS, UM. Lecture, Brief itroductio to Sigals ad Systems, Review of Liear Algebra ad Sigal Processig Related Mathematics . Brief Itroductio to Sigals What is sigal
Sigal Processig i Mechatroics Zhu K.P. AIS, UM. Lecture, Brief itroductio to Sigals ad Systems, Review of Liear Algebra ad Sigal Processig Related Mathematics . Brief Itroductio to Sigals What is sigal
Motor Acoustics Overview
 Motor Acoustics Overview Ceter for Acoustics & Vibratio May 5, 9 Dr. Marti L. Pollack APS Backgroud Research, Developmet, & Egieerig Small Busiess Approximately 57 Egieers & Scietists ~ ½ hold PhDs i Egieerig,
Motor Acoustics Overview Ceter for Acoustics & Vibratio May 5, 9 Dr. Marti L. Pollack APS Backgroud Research, Developmet, & Egieerig Small Busiess Approximately 57 Egieers & Scietists ~ ½ hold PhDs i Egieerig,
Dynamic Response of Second Order Mechanical Systems with Viscous Dissipation forces
 Hadout #b (pp. 4-55) Dyamic Respose o Secod Order Mechaical Systems with Viscous Dissipatio orces M X + DX + K X = F t () Periodic Forced Respose to F (t) = F o si( t) ad F (t) = M u si(t) Frequecy Respose
Hadout #b (pp. 4-55) Dyamic Respose o Secod Order Mechaical Systems with Viscous Dissipatio orces M X + DX + K X = F t () Periodic Forced Respose to F (t) = F o si( t) ad F (t) = M u si(t) Frequecy Respose
Finite Element Modeling of Seismic Response of Field Fabricated Liquefied Natural Gas (LNG) Spherical Storage Vessels
 Spherical Storage Vessels") Egieerig, 013, 5, 543-550 doi:10.436/eg.013.56065 Published Olie Jue 013 (http://www.scirp.org/joural/eg) Fiite Elemet Modelig of Seismic Respose of Field Fabricated Liquefied Natural Gas (LNG) Spherical
Egieerig, 013, 5, 543-550 doi:10.436/eg.013.56065 Published Olie Jue 013 (http://www.scirp.org/joural/eg) Fiite Elemet Modelig of Seismic Respose of Field Fabricated Liquefied Natural Gas (LNG) Spherical
Natural frequencies, mode shapes and modal damping values are the most important parameters to
 Abstract Natural frequecies, mode shapes ad modal dampig values are the most importat parameters to describe the oise ad vibratio behaviour of a mechaical system. For rotatig machiery, however, the directivity
Abstract Natural frequecies, mode shapes ad modal dampig values are the most importat parameters to describe the oise ad vibratio behaviour of a mechaical system. For rotatig machiery, however, the directivity
WHAT IS THE PROBABILITY FUNCTION FOR LARGE TSUNAMI WAVES? ABSTRACT
 WHAT IS THE PROBABILITY FUNCTION FOR LARGE TSUNAMI WAVES? Harold G. Loomis Hoolulu, HI ABSTRACT Most coastal locatios have few if ay records of tsuami wave heights obtaied over various time periods. Still
WHAT IS THE PROBABILITY FUNCTION FOR LARGE TSUNAMI WAVES? Harold G. Loomis Hoolulu, HI ABSTRACT Most coastal locatios have few if ay records of tsuami wave heights obtaied over various time periods. Still
ECE 422/522 Power System Operations & Planning/Power Systems Analysis II : 6 - Small Signal Stability
 ECE 4/5 Power System Operatios & Plaig/Power Systems Aalysis II : 6 - Small Sigal Stability Sprig 014 Istructor: Kai Su 1 Refereces Kudur s Chapter 1 Saadat s Chapter 11.4 EPRI Tutorial s Chapter 8 Power
ECE 4/5 Power System Operatios & Plaig/Power Systems Aalysis II : 6 - Small Sigal Stability Sprig 014 Istructor: Kai Su 1 Refereces Kudur s Chapter 1 Saadat s Chapter 11.4 EPRI Tutorial s Chapter 8 Power
Formation of A Supergain Array and Its Application in Radar
 Formatio of A Supergai Array ad ts Applicatio i Radar Tra Cao Quye, Do Trug Kie ad Bach Gia Duog. Research Ceter for Electroic ad Telecommuicatios, College of Techology (Coltech, Vietam atioal Uiversity,
Formatio of A Supergai Array ad ts Applicatio i Radar Tra Cao Quye, Do Trug Kie ad Bach Gia Duog. Research Ceter for Electroic ad Telecommuicatios, College of Techology (Coltech, Vietam atioal Uiversity,
Session 5. (1) Principal component analysis and Karhunen-Loève transformation
 Principal component analysis and Karhunen-Loève transformation") 200 Autum semester Patter Iformatio Processig Topic 2 Image compressio by orthogoal trasformatio Sessio 5 () Pricipal compoet aalysis ad Karhue-Loève trasformatio Topic 2 of this course explais the image
200 Autum semester Patter Iformatio Processig Topic 2 Image compressio by orthogoal trasformatio Sessio 5 () Pricipal compoet aalysis ad Karhue-Loève trasformatio Topic 2 of this course explais the image
mx bx kx F t. dt IR I LI V t, Q LQ RQ V t,
 Lecture 5 omplex Variables II (Applicatios i Physics) (See hapter i Boas) To see why complex variables are so useful cosider first the (liear) mechaics of a sigle particle described by Newto s equatio
Lecture 5 omplex Variables II (Applicatios i Physics) (See hapter i Boas) To see why complex variables are so useful cosider first the (liear) mechaics of a sigle particle described by Newto s equatio
Free Space Optical Wireless Communications under Turbulence Channel Effect
 IOSR Joural of Electroics ad Commuicatio Egieerig (IOSR-JECE) e-issn: 78-834,p- ISSN: 78-8735.Volume 9, Issue 3, Ver. III (May - Ju. 014), PP 01-08 Free Space Optical Wireless Commuicatios uder Turbulece
IOSR Joural of Electroics ad Commuicatio Egieerig (IOSR-JECE) e-issn: 78-834,p- ISSN: 78-8735.Volume 9, Issue 3, Ver. III (May - Ju. 014), PP 01-08 Free Space Optical Wireless Commuicatios uder Turbulece
Deterministic Model of Multipath Fading for Circular and Parabolic Reflector Patterns
 To appear i the Proceedigs of the 5 IEEE outheastco, (Ft. Lauderdale, FL), April 5 Determiistic Model of Multipath Fadig for Circular ad Parabolic Reflector Patters Dwight K. Hutcheso dhutche@clemso.edu
To appear i the Proceedigs of the 5 IEEE outheastco, (Ft. Lauderdale, FL), April 5 Determiistic Model of Multipath Fadig for Circular ad Parabolic Reflector Patters Dwight K. Hutcheso dhutche@clemso.edu
CALCULATION OF STIFFNESS AND MASS ORTHOGONAL VECTORS
 14. CALCULATION OF STIFFNESS AND MASS ORTHOGONAL VECTORS LDR Vectors are Always More Accurate tha Usig the Exact Eigevectors i a Mode Superpositio Aalysis 14.1 INTRODUCTION The major reaso to calculate
14. CALCULATION OF STIFFNESS AND MASS ORTHOGONAL VECTORS LDR Vectors are Always More Accurate tha Usig the Exact Eigevectors i a Mode Superpositio Aalysis 14.1 INTRODUCTION The major reaso to calculate
Signal Processing in Mechatronics. Lecture 3, Convolution, Fourier Series and Fourier Transform
 Sigal Processig i Mechatroics Summer semester, 1 Lecture 3, Covolutio, Fourier Series ad Fourier rasform Dr. Zhu K.P. AIS, UM 1 1. Covolutio Covolutio Descriptio of LI Systems he mai premise is that the
Sigal Processig i Mechatroics Summer semester, 1 Lecture 3, Covolutio, Fourier Series ad Fourier rasform Dr. Zhu K.P. AIS, UM 1 1. Covolutio Covolutio Descriptio of LI Systems he mai premise is that the
Open Access Research of Strip Flatness Control Based on Legendre Polynomial Decomposition
 Sed Orders for Reprits to reprits@bethamsciece.ae The Ope Automatio ad Cotrol Systems Joural, 215, 7, 23-211 23 Ope Access Research of Strip Flatess Cotrol Based o Legedre Polyomial Decompositio Ya Liu,
Sed Orders for Reprits to reprits@bethamsciece.ae The Ope Automatio ad Cotrol Systems Joural, 215, 7, 23-211 23 Ope Access Research of Strip Flatess Cotrol Based o Legedre Polyomial Decompositio Ya Liu,
Sensitivity Analysis of Daubechies 4 Wavelet Coefficients for Reduction of Reconstructed Image Error
 Proceedigs of the 6th WSEAS Iteratioal Coferece o SIGNAL PROCESSING, Dallas, Texas, USA, March -4, 7 67 Sesitivity Aalysis of Daubechies 4 Wavelet Coefficiets for Reductio of Recostructed Image Error DEVINDER
Proceedigs of the 6th WSEAS Iteratioal Coferece o SIGNAL PROCESSING, Dallas, Texas, USA, March -4, 7 67 Sesitivity Aalysis of Daubechies 4 Wavelet Coefficiets for Reductio of Recostructed Image Error DEVINDER
CHAPTER 8 SYSTEMS OF PARTICLES
 CHAPTER 8 SYSTES OF PARTICLES CHAPTER 8 COLLISIONS 45 8. CENTER OF ASS The ceter of mass of a system of particles or a rigid body is the poit at which all of the mass are cosidered to be cocetrated there
CHAPTER 8 SYSTES OF PARTICLES CHAPTER 8 COLLISIONS 45 8. CENTER OF ASS The ceter of mass of a system of particles or a rigid body is the poit at which all of the mass are cosidered to be cocetrated there
A statistical method to determine sample size to estimate characteristic value of soil parameters
 A statistical method to determie sample size to estimate characteristic value of soil parameters Y. Hojo, B. Setiawa 2 ad M. Suzuki 3 Abstract Sample size is a importat factor to be cosidered i determiig
A statistical method to determie sample size to estimate characteristic value of soil parameters Y. Hojo, B. Setiawa 2 ad M. Suzuki 3 Abstract Sample size is a importat factor to be cosidered i determiig
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science. BACKGROUND EXAM September 30, 2004.
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Departmet of Electrical Egieerig ad Computer Sciece 6.34 Discrete Time Sigal Processig Fall 24 BACKGROUND EXAM September 3, 24. Full Name: Note: This exam is closed
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Departmet of Electrical Egieerig ad Computer Sciece 6.34 Discrete Time Sigal Processig Fall 24 BACKGROUND EXAM September 3, 24. Full Name: Note: This exam is closed
Exponential Moving Average Pieter P
 Expoetial Movig Average Pieter P Differece equatio The Differece equatio of a expoetial movig average lter is very simple: y[] x[] + (1 )y[ 1] I this equatio, y[] is the curret output, y[ 1] is the previous
Expoetial Movig Average Pieter P Differece equatio The Differece equatio of a expoetial movig average lter is very simple: y[] x[] + (1 )y[ 1] I this equatio, y[] is the curret output, y[ 1] is the previous
METHOD OF FUNDAMENTAL SOLUTIONS FOR HELMHOLTZ EIGENVALUE PROBLEMS IN ELLIPTICAL DOMAINS
 Please cite this article as: Staisław Kula, Method of fudametal solutios for Helmholtz eigevalue problems i elliptical domais, Scietific Research of the Istitute of Mathematics ad Computer Sciece, 009,
Please cite this article as: Staisław Kula, Method of fudametal solutios for Helmholtz eigevalue problems i elliptical domais, Scietific Research of the Istitute of Mathematics ad Computer Sciece, 009,
As metioed earlier, directly forecastig o idividual product demads usually result i a far-off forecast that ot oly impairs the quality of subsequet ma
 Semicoductor Product-mix Estimate with Dyamic Weightig Scheme Argo Che, Ziv Hsia ad Kyle Yag Graduate Istitute of Idustrial Egieerig, Natioal Taiwa Uiversity Roosevelt Rd. Sec. 4, Taipei, Taiwa, 6 ache@tu.edu.tw
Semicoductor Product-mix Estimate with Dyamic Weightig Scheme Argo Che, Ziv Hsia ad Kyle Yag Graduate Istitute of Idustrial Egieerig, Natioal Taiwa Uiversity Roosevelt Rd. Sec. 4, Taipei, Taiwa, 6 ache@tu.edu.tw
ANALYSIS OF DAMPING EFFECT ON BEAM VIBRATION
 Molecular ad Quatum Acoustics vol. 7, (6) 79 ANALYSIS OF DAMPING EFFECT ON BEAM VIBRATION Jerzy FILIPIAK 1, Lech SOLARZ, Korad ZUBKO 1 Istitute of Electroic ad Cotrol Systems, Techical Uiversity of Czestochowa,
Molecular ad Quatum Acoustics vol. 7, (6) 79 ANALYSIS OF DAMPING EFFECT ON BEAM VIBRATION Jerzy FILIPIAK 1, Lech SOLARZ, Korad ZUBKO 1 Istitute of Electroic ad Cotrol Systems, Techical Uiversity of Czestochowa,
Information-based Feature Selection
 Iformatio-based Feature Selectio Farza Faria, Abbas Kazeroui, Afshi Babveyh Email: {faria,abbask,afshib}@staford.edu 1 Itroductio Feature selectio is a topic of great iterest i applicatios dealig with
Iformatio-based Feature Selectio Farza Faria, Abbas Kazeroui, Afshi Babveyh Email: {faria,abbask,afshib}@staford.edu 1 Itroductio Feature selectio is a topic of great iterest i applicatios dealig with
Signal Processing. Lecture 02: Discrete Time Signals and Systems. Ahmet Taha Koru, Ph. D. Yildiz Technical University.
 Sigal Processig Lecture 02: Discrete Time Sigals ad Systems Ahmet Taha Koru, Ph. D. Yildiz Techical Uiversity 2017-2018 Fall ATK (YTU) Sigal Processig 2017-2018 Fall 1 / 51 Discrete Time Sigals Discrete
Sigal Processig Lecture 02: Discrete Time Sigals ad Systems Ahmet Taha Koru, Ph. D. Yildiz Techical Uiversity 2017-2018 Fall ATK (YTU) Sigal Processig 2017-2018 Fall 1 / 51 Discrete Time Sigals Discrete
PAijpam.eu ON TENSOR PRODUCT DECOMPOSITION
 Iteratioal Joural of Pure ad Applied Mathematics Volume 103 No 3 2015, 537-545 ISSN: 1311-8080 (prited versio); ISSN: 1314-3395 (o-lie versio) url: http://wwwijpameu doi: http://dxdoiorg/1012732/ijpamv103i314
Iteratioal Joural of Pure ad Applied Mathematics Volume 103 No 3 2015, 537-545 ISSN: 1311-8080 (prited versio); ISSN: 1314-3395 (o-lie versio) url: http://wwwijpameu doi: http://dxdoiorg/1012732/ijpamv103i314
Discrete Orthogonal Moment Features Using Chebyshev Polynomials
 Discrete Orthogoal Momet Features Usig Chebyshev Polyomials R. Mukuda, 1 S.H.Og ad P.A. Lee 3 1 Faculty of Iformatio Sciece ad Techology, Multimedia Uiversity 75450 Malacca, Malaysia. Istitute of Mathematical
Discrete Orthogoal Momet Features Usig Chebyshev Polyomials R. Mukuda, 1 S.H.Og ad P.A. Lee 3 1 Faculty of Iformatio Sciece ad Techology, Multimedia Uiversity 75450 Malacca, Malaysia. Istitute of Mathematical
The improvement of the volume ratio measurement method in static expansion vacuum system
 Available olie at www.sciecedirect.com Physics Procedia 32 (22 ) 492 497 8 th Iteratioal Vacuum Cogress The improvemet of the volume ratio measuremet method i static expasio vacuum system Yu Hogya*, Wag
Available olie at www.sciecedirect.com Physics Procedia 32 (22 ) 492 497 8 th Iteratioal Vacuum Cogress The improvemet of the volume ratio measuremet method i static expasio vacuum system Yu Hogya*, Wag
Chapter 9 - CD companion 1. A Generic Implementation; The Common-Merge Amplifier. 1 τ is. ω ch. τ io
 Chapter 9 - CD compaio CHAPTER NINE CD-9.2 CD-9.2. Stages With Voltage ad Curret Gai A Geeric Implemetatio; The Commo-Merge Amplifier The advaced method preseted i the text for approximatig cutoff frequecies
Chapter 9 - CD compaio CHAPTER NINE CD-9.2 CD-9.2. Stages With Voltage ad Curret Gai A Geeric Implemetatio; The Commo-Merge Amplifier The advaced method preseted i the text for approximatig cutoff frequecies
Excellent Performances of The Third-level Disturbed Chaos in The Cryptography Algorithm and The Spread Spectrum Communication
 Joural of Iformatio Hidig ad Multimedia Sigal Processig c 26 ISSN 273-422 Ubiquitous Iteratioal Volume 7, Number 4, July 26 Excellet Performaces of The Third-level Disturbed Chaos i The Cryptography Algorithm
Joural of Iformatio Hidig ad Multimedia Sigal Processig c 26 ISSN 273-422 Ubiquitous Iteratioal Volume 7, Number 4, July 26 Excellet Performaces of The Third-level Disturbed Chaos i The Cryptography Algorithm
EVALUATION OF GLASS FIBER/EPOXY INTERFACIAL STRENGTH BY THE CRUCIFORM SPECIMEN METHOD
 EVALUATION OF GLASS FIBER/EPOX INTERFACIAL STRENGTH B THE CRUCIFORM SPECIMEN METHOD Ju KOANAGI, Hajime KATO, Akihiro KASHIMA, uichi IGARASHI, Keichi WATANABE 3, Ichiro UENO 4 ad Shiji OGIHARA 4 Istitute
EVALUATION OF GLASS FIBER/EPOX INTERFACIAL STRENGTH B THE CRUCIFORM SPECIMEN METHOD Ju KOANAGI, Hajime KATO, Akihiro KASHIMA, uichi IGARASHI, Keichi WATANABE 3, Ichiro UENO 4 ad Shiji OGIHARA 4 Istitute
Paper-II Chapter- Damped vibration
 Paper-II Chapter- Damped vibratio Free vibratios: Whe a body cotiues to oscillate with its ow characteristics frequecy. Such oscillatios are kow as free or atural vibratios of the body. Ideally, the body
Paper-II Chapter- Damped vibratio Free vibratios: Whe a body cotiues to oscillate with its ow characteristics frequecy. Such oscillatios are kow as free or atural vibratios of the body. Ideally, the body
Measurement uncertainty of the sound absorption
 Measuremet ucertaity of the soud absorptio coefficiet Aa Izewska Buildig Research Istitute, Filtrowa Str., 00-6 Warsaw, Polad a.izewska@itb.pl 6887 The stadard ISO/IEC 705:005 o the competece of testig
Measuremet ucertaity of the soud absorptio coefficiet Aa Izewska Buildig Research Istitute, Filtrowa Str., 00-6 Warsaw, Polad a.izewska@itb.pl 6887 The stadard ISO/IEC 705:005 o the competece of testig
Double Stage Shrinkage Estimator of Two Parameters. Generalized Exponential Distribution
 Iteratioal Mathematical Forum, Vol., 3, o. 3, 3-53 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/.9/imf.3.335 Double Stage Shrikage Estimator of Two Parameters Geeralized Expoetial Distributio Alaa M.
Iteratioal Mathematical Forum, Vol., 3, o. 3, 3-53 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/.9/imf.3.335 Double Stage Shrikage Estimator of Two Parameters Geeralized Expoetial Distributio Alaa M.