Convergence of a Generalized Midpoint Iteration
|
|
|
- Gwen Sharon Henderson
- 5 years ago
- Views:
Transcription
1 J. Able, D. Bradley, A.S. Moon under the supervision of Dr. Xingping Sun REU Final Presentation July 31st, 2014
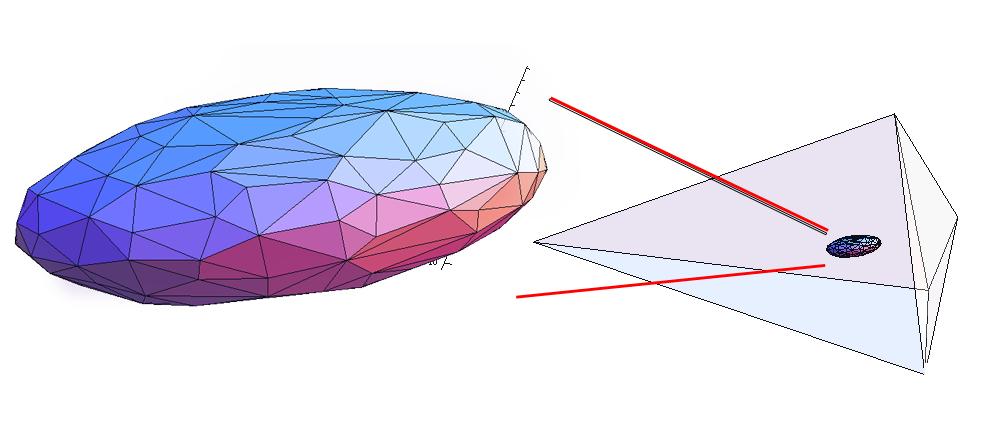
2 Preliminary Words O Rourke s conjecture We begin with a motivating question concerning the convergence of sequences of centroid polyhedra. Conjecture Given any convex polyhedron P (0) in R 3, the iteration process which takes the convex hull c(p (n) ) of the centroids of faces of P (n) converges to an ellipsoid as n.
3 Preliminary Words
4 Preliminary Words O Rourke s conjecture To work towards a solution of O Rourke s conjecture, we examine a simpler iteration of midpoints in R 2 similar to the midpoint iteration of convex polygons.
5 Preliminary Words Notation Let d(, ) denote the Euclidean distance between two points. Let denote the Euclidean norm. Let c( ) denote the convex hull of a set. Let cl( ) denote set closure (closure includes limit points). Let B(x, ε) denote the open ball of radius ε about x. Let diam( ) denote the diameter of a set.
, we")
, sup y Y y Y inf d(y,")
6 Preliminary Words Hausdorff distance For two nonempty compact subsets X, Y of (R 2, d), we denote the Hausdorff distance by d H (X, Y ) = max { sup x X inf d(x, y), sup y Y y Y inf d(y, x) x X }.
7 Propositions About Compact Sets Propositions about compact sets We identify a polygon P with the convex hull of a finite set of vertices in R 2. Recall the Heine-Borel characterization of compact subsets of R 2 (compact iff bounded and closed). Then P is a bounded and closed set of the plane. There are many useful results about nested sequences of compact subsets which can be applied to polygons on the plane.
8 Propositions About Compact Sets Propositions about compact sets Proposition Suppose K n+1 K n for all n N, where all K n are compact, nonempty sets. Then the intersection I = n N K n. is nonempty and compact. Proof. I is closed and bounded, since arbitrary intersections of closed sets are closed and I K 1. Define a sequence {a p } such that a p K p \ K p 1. Then there exists by compactness a subsequence {a nk } with limit in I.
9 Propositions About Compact Sets Propositions about compact sets Proposition Let I = n N K n be the intersection of K n. If lim n diam(k n ) = 0, then I = {x 0 } for some x 0 K 1. Proof. If I is not a singleton, then diam(i ) > 0. But I K n for all n, implying lim diam(k n ) > 0.
10 Propositions About Compact Sets Propositions about compact sets Proposition Let {K n } n N be a sequence of compact subsets such that K n+1 K n for all n N, and I their infinite intersection n N K n. Then lim d H (K n, I ) = 0.
11 Propositions About Compact Sets Proof. By compactness, choose sequences {x n }, {y n } s.t. x n K n \ I and y n I for all n N, such that {x n } α, {y n } β and d(x n, y n ) = sup inf d(x, y). x K n y I By a contradiction, α I, so that And we know: d(x n, y n ) = inf y I d(x n, y) d(x n, α) d(x n, α) 0 as n
12 Propositions About Compact Sets Propositions about compact sets Proposition Suppose {A n } is a sequence of compact sets such that A n A n+1 and A n N K for all n N and some compact K. Let U = n A n. Then lim A n = cl(u). Proof. Similar to previous proof concerning intersections. Identify convergent subsequences of relevant sequences and bound the Hausdorff distance between the sequences so that this distance approaches 0.
13 Midpoint Polygon Sequences Background First solved by the French mathematician J.G. Darboux, the midpoint polygon problem has been examined using diverse techniques, including finite Fourier analysis and matrix products [1] [2] [3] [4]. We present an elementary analysis proof of the midpoint polygon problem.
14 Midpoint Polygon Sequences Proposition The original problem statement from the American Mathematical Monthly reads Proposition Let Π = P 0 P 1 P k 1 be a closed polygon in the plane (k 2). Denote by P 0, P 1,..., P k 1 the midpoints of the sides P 0 P 1, P 1 P 2,..., P k 2 P k 1, respectively, obtaining the fist derived polygon Π = P 0 P 1 P k 1. Repeat the same construction on Π obtaining the second derived polygon Π, and finally, after n constructions, obtain the nth derived polygon Π (n) = P (n) 0 P(n) 1 P (n) k 1. Show that the vertices of Π(n) converge, as n, to the centroid of the original points P 0, P 1,..., P k 1.
15 Midpoint Polygon Sequences Midpoint problem In the language of elementary analysis and Hausdorff convergence, Proposition Given an initial set of vertices { } P (0) = v (0) 1,..., v (0) Q in general linear position, the sequence of convex hulls c(p (n) ) produced by midpoint iteration converge in the Hausdorff metric to the centroid of c(p (0) ). Proof. Without loss of generality, suppose the centroid of P (0) is the origin. The Hausdorff limit lim P (n) is equal to the intersection n N c(p(n) ), which we know is nonempty and compact.
16 Midpoint Polygon Sequences Midpoint problem Generally, the edge lengths are bounded: sup v (n) i v (n) i+1 (1 i 2 )n 1 diam(c(p (0) )) And the perimeter bounds the diameter of a closed convex polygon, so diam(c(p (k) )) Q i=1 v (n) i v (n) i+1 Q(1 2 )n 1 diam(c(p (0) )). Conclude lim diam(c(p (n) )) = 0. Then lim c(p (n) ) = {x 0 } for some x 0. But by calculation, we see that the centroid of P (n+1) is identically the centroid of P (n), the origin. So 0 c(p (n) ) is the limit of { c(p (n) ) }
17 Midpoint Polygon Sequences Regularity in the limit Proposition Let e (n) j denote the jth edge length v (n) j v (n) j+1 of the nth iteration of the initial polygon of Q vertices. Then lim n e (n) i e (n) j = 0 for any i, j indices modulo Q. Proof. e (n) i e (n) j e (n) i + e (n) j 2 diam(p (n) ) since every edge is bounded by the diameter. Now lim diam(c(p (n) )) = 0, so lim n e (n) i e (n) j = 0.
18 Midpoint Polygon Sequences Regularity in the limit By the previous proposition, given ε > 0, there is a large enough N such that n > N implies e (n) i for all i, j indices taken modulo Q. e (n) j < ε
19 Generalized Midpoint Iteration Generalized Midpoint Iteration Instead of restricting to midpoints between adjacent vertices, we now consider midpoints of every pair of vertices. This resembles the O Rourke iteration of centroids of faces of polyhedra because each iteration contains more points than the previous. We will find that this process can be characterized by fixed points.
20 Generalized Midpoint Iteration Generalized Midpoint Iteration Informally, the Generalized Midpoint Iteration (GMI) on P (0) produces vertex sets P (k) containing every possible midpoint combination of the previous vertex set P (k 1), and records how many times p P (k) occurs as a midpoint by the multiplicity function µ k : P (k) N.
21 Generalized Midpoint Iteration
22 Generalized Midpoint Iteration
23 Generalized Midpoint Iteration
24 Generalized Midpoint Iteration
25 Generalized Midpoint Iteration
26 Generalized Midpoint Iteration Subsystems Within the GMI, we can consider individual sets of three points and their direct descendants for all iterations. The centroid of these subsystems will be in the limit by the classical midpoint iteration on a polygon. This tells us that that GMI does not converge to a single point like the classical midpoint iteration.
27 Generalized Midpoint Iteration Fixed points A point is fixed if it remains in all succeeding iterations. Under the GMI, a point becomes fixed if it has multiplicity greater than 2 (since there are three ways of pairing a multiplicity 3 point with itself). Interestingly, we can guarantee, under the GMI on polygons with more than 3 vertices, the existence of explicit fixed points past the second iteration. Also, since the midpoint of a fixed point with any other point is fixed (has multiplicity greater than 2), we can eventually fill up the object of convergence through one initial fixed point.
28 Generalized Midpoint Iteration Fixed points Given any four points, we can find a fixed point of multiplicity 3 after just two iterations using these combinations: 1 ( ) 3p (0) 1 + 2p (0) 2 + 2p (0) 3 + p (0) 4 4 = 1 ( (p(0) 1 + p (0) 2 ) (p(0) 1 + p (0) 3 )) (1 2 (p(0) 1 + p (0) 2 ) + 1 ) 2 (p(0) 3 + p (0) 4 ) = 1 ( (p(0) 1 + p (0) 2 ) (p(0) 1 + p (0) 4 )) (1 2 (p(0) 1 + p (0) 3 ) + 1 ) 2 (p(0) 2 + p (0) 3 ) = 1 ( (p(0) 1 + p (0) 2 ) (p(0) 2 + p (0) 3 )) (1 2 (p(0) 1 + p (0) 3 ) + 1 ) 2 (p(0) 1 + p (0) 4 )
29 Generalized Midpoint Iteration GMI Examples
30 Hausdorff Convergence Results for the GMI Goal We now prove several convergence results involving the sets of fixed points F (n), iteration midpoints P (n), and their convex hulls c(f (n) ) and c(p (n) ) respectively. lim d H (F (n), c(f (n) )) = 0 lim d H (P (n), F (n) ) = 0 lim d H (P (n), c(f (n) )) = 0
31 Hausdorff Convergence Results for the GMI Intuitition
32 Hausdorff Convergence Results for the GMI Existence of limits We observe that the sequence of convex hulls { c(p (n) ) } n N form a nested sequence of compact sets. Proposition lim c(p (n) ) = c(p (n) ) Proof. This is a direct consequence of the earlier proposition about the intersection of nested compact sets, satisfied because the c(p (n) ) are certainly nested and compact.
33 Hausdorff Convergence Results for the GMI Existence of limits Proposition lim c(f (n) ) exists, with respect to the Hausdorff metric. Proof. By the definition of fixed points, F (n) F (n+1). This implies the convex hulls c(f (n) ) c(f (n+1) ) form a reverse-nested sequence of subsets. Lastly, c(f (n) ) c(p (0) ) for all n. So { c(f (n) ) } satisfies the conditions of Proposition 3.9. As a remark, this implies { c(f (n) ) } are a Cauchy sequence.
34 Hausdorff Convergence Results for the GMI Hausdorff distance Recall the Hausdorff distance between two sets is given by d H (X, Y ) = max { sup x X inf d(x, y), sup y Y y Y inf d(y, x) x X }.
35 Hausdorff Convergence Results for the GMI Midpoint Triangle Property
36 Hausdorff Convergence Results for the GMI Propositions Proposition lim d H (F (n), c(f (n) )) = 0 Proof. Note F (n) c(f (n) ), so we consider the distance from c(f (n) ) to F (n). Let x c(f (n) ). There are three noncollinear points in F (n) such that x is in their convex hull. Taking n iterations, we have 4 n congruent triangles, since these points are all fixed, and x is in one of these 4 n triangles.
37 Hausdorff Convergence Results for the GMI Propositions
38 Hausdorff Convergence Results for the GMI Propositions Let T n represent a triangle of the nth subdivision containing x. By the Schoenberg midpoint iteration, for arbitrary ε > 0, there exists an N such that for n > N, the vertices {v 1, v 2, v 3 } of T n are within ε distance of the centroid c of T n. Then This implies inf i d H (F (n), c(f (n) )) = d(x, v i ) sup d(c, v j ) < ε j sup x c(f (n) ) inf d(x, y) < ε. y F (n)
39 Hausdorff Convergence Results for the GMI Propositions Proposition lim d H (P (n), F (n) ) = 0 Proof. Note F (n) P (n), so the Hausdorff distance is equal to d H (P (n), F (n) ) = sup x P (n) inf d(x, y). y F (n)
40 Hausdorff Convergence Results for the GMI Propositions Let p P (n+1) arbitrarily. By definition of the GMI, there exists at least one pair p, q P (n) such that p+q 2 = p. Then by the Midpoint Triangle Property, d(p, F (n+1) ) 1 2 d(p, F (n) ) 1 2 sup x P (n) inf d(x, y). y F (n)
41 Hausdorff Convergence Results for the GMI Propositions Since p was arbitrary and P (n) and F (n) are finite sets, we may choose p such that sup d(z, F (n+1) ) = d(p, F (n+1) ). z P (n+1) This is precisely the inequality d H (P (n+1), F (n+1) ) 1 2 d H(P (n), F (n) ).
42 Hausdorff Convergence Results for the GMI Propositions Proposition lim d H (P (n), c(f (n) )) = 0 Proof. Triangle inequality: d H (P (n), c(f (n) )) d H (P (n), F (n) ) + d H (F (n), c(f (n) )) < 1 2 ε ε = ε for appropriate N.
43 Hausdorff Convergence Results for the GMI Main result Theorem The sequence of convex hulls of fixed points F (n) and the sequence of convex hulls of P (n) have the same limit. That is, lim c(f (n) ) = lim c(p (n) ) = c(p (n) ) And consequently lim d H (P (n), c(p (n) )) = 0.
44 Hausdorff Convergence Results for the GMI Main result Proof. For notation, let F = lim c(f (n) ) and P = lim c(p (n) ). Seeking contradiction, suppose F P. Then d H (F, P) 0. By proposition 5.2, the convergent sequence { c(f (n) ) } is also n N a Cauchy sequence. Therefore, for all ε there exists N such that for n, m > N, d H (c(f (n) ), c(f (m) )) < ε.
45 Hausdorff Convergence Results for the GMI Main result By compactness, choose p c(p (N) ) and f c(f (N) ) such that d(p, f ) = d H (c(p (N) ), c(f (N) )). Since F P, d(p, f ) is necessarily positive. Now, the midpoint of f and p is in F (N+1) by proposition 4.3. Denote g = p+f 2. Then d H (c(f (N) ), c(f (N+1) )) Passing to the limit, inf d(g, y) 1 d(p, f ) > 0. y c(f (N) ) 2 lim N d H (c(f (N) ), c(f (N+1) )) > 0. contradicting the fact that { c(f (k) ) } is a Cauchy sequence. Conclude F = P necessarily.
46 Hausdorff Convergence Results for the GMI Main result
47 Hausdorff Convergence Results for the GMI Main result Consequently, d H (P (n), c(p (n) )) d H (P (n), c(f (n) )) + d H (c(f (n) ), c(p (n) )) lim d H (P (n), c(p (n) )) = 0.
48 Hausdorff Convergence Results for the GMI Main result The takeaway from this result is that the P (n) become dense in their convex hulls c(p (n) ), and, since the convex hulls c(p (n) ) converge to their intersection n N c(p(n) ), the P (n) become dense in the limit. The c(f (n) ) are approaching the limit from the inside, the c(p (n) ) are approaching the limit from the outside, and the P (n) are dense in the limit where they meet.
49 Unit Square Example Unit square example We still don t know anything about the shape of the limit, whether it becomes smooth or elliptical. So we considered the simplest case of the GMI on a unit square.
50 Unit Square Example Unit square example It turns out that the unit square limits on the boundary to a 44-gon! (The inside will be filled up because of our major theorem on density.) This is unexpected behavior because we expected a circle, or at least an ellipse, or at the very least something smooth. While this behavior makes the GMI unlikely to directly generalize to O Rourke s conjecture, it is still very interesting.
51 Unit Square Example Unit square example Surely if we ignore multiplicity and fixed points, the unit square would limit to a circle, right? It looks like it!
52 Unit Square Example Unit square example But actually our calculations in Mathematica suggest that this limit is not a circle. After five iterations, the area of the limit is less than the area of the smallest circle containing all the known limit points. This suggests that O Rourke s conjecture may be false. However, there are many differences between the GMI and the O Rourke iteration, including using centroids instead of midpoints, using R 3 instead of R 2, and taking only centroids on the boundary instead of all centroids. In general, however, this sort of iteration probably does not produce strictly elliptical bodies.
53 Unit Square Example
54 Conclusion What we showed In the GMI, the points become dense in the limit, which is equivalently the union of the convex hulls of fixed points or the intersection of the convex hulls of all points. This process turns a discrete set into a subset of R 2.
55 Conclusion What we didn t show We weren t able to prove O Rourke s conjecture about the centroid-of-faces iteration converging to an ellipsoid. In fact, our results do not include a characterization of the shape of the limit set. But the theory we developed still may lead in some way to a solution of O Rourke s conjecture.
56 Conclusion Multiplicity and fixed points We developed the concept of multiplicity in order to find some structure in this ever-increasing set of points under the GMI. However, we saw that fixed points from multiplicity lead to a strange convergence result on the unit square, which does not become smooth but converges to a 44-gon. Since fixed points do not lead to the convergence results we expected, they may not be the right tool to work towards a proof of O Rourke s conjecture (although they are interesting in their own right!). However, the proof techniques may still apply.
57 Conclusion Future work Prove a similar density result (lim d H (P (n), c(p (n) ) = 0) without counting multiplicity and without the fixed points that come from multiplicity. Prove results on the shape of the limit does the GMI converge to an ellipse, some sort of generalized ellipse, or a union of ellipses? (Or just to some blob) Consider a generalized centroid iteration, taking centroids of three points instead of midpoints. More generally, we could iterate by any convex combination of points and hope for some sort of result. Extend to three dimensions or to general R n. Some of our proofs rely on the structure of the plane. (Or to general normed linear spaces eg consider functions instead of points.)
58 Conclusion Darboux, G., Sur un probleme de geometrie elementaire, Bulletin des sciences mathematiques et astronomiques 2e serie, 2 (1878), Ouyang, Charles, A Problem Concerning the Dynamic Geometry of Polygons (2013). Schoenberg, I. J., The finite Fourier series and elementary geometry, Amer. Math. Monthly, 57 (1950), Sun, Xingping and Eric Hintikka, Convergence of Sequences of Polygons, (2014).
Course 212: Academic Year Section 1: Metric Spaces
 Course 212: Academic Year 1991-2 Section 1: Metric Spaces D. R. Wilkins Contents 1 Metric Spaces 3 1.1 Distance Functions and Metric Spaces............. 3 1.2 Convergence and Continuity in Metric Spaces.........
Course 212: Academic Year 1991-2 Section 1: Metric Spaces D. R. Wilkins Contents 1 Metric Spaces 3 1.1 Distance Functions and Metric Spaces............. 3 1.2 Convergence and Continuity in Metric Spaces.........
M17 MAT25-21 HOMEWORK 6
 M17 MAT25-21 HOMEWORK 6 DUE 10:00AM WEDNESDAY SEPTEMBER 13TH 1. To Hand In Double Series. The exercises in this section will guide you to complete the proof of the following theorem: Theorem 1: Absolute
M17 MAT25-21 HOMEWORK 6 DUE 10:00AM WEDNESDAY SEPTEMBER 13TH 1. To Hand In Double Series. The exercises in this section will guide you to complete the proof of the following theorem: Theorem 1: Absolute
7 Complete metric spaces and function spaces
 7 Complete metric spaces and function spaces 7.1 Completeness Let (X, d) be a metric space. Definition 7.1. A sequence (x n ) n N in X is a Cauchy sequence if for any ɛ > 0, there is N N such that n, m
7 Complete metric spaces and function spaces 7.1 Completeness Let (X, d) be a metric space. Definition 7.1. A sequence (x n ) n N in X is a Cauchy sequence if for any ɛ > 0, there is N N such that n, m
1 Topology Definition of a topology Basis (Base) of a topology The subspace topology & the product topology on X Y 3
 of a topology The subspace topology & the product topology on X Y 3") Index Page 1 Topology 2 1.1 Definition of a topology 2 1.2 Basis (Base) of a topology 2 1.3 The subspace topology & the product topology on X Y 3 1.4 Basic topology concepts: limit points, closed sets,
Index Page 1 Topology 2 1.1 Definition of a topology 2 1.2 Basis (Base) of a topology 2 1.3 The subspace topology & the product topology on X Y 3 1.4 Basic topology concepts: limit points, closed sets,
METRIC SPACES KEITH CONRAD
 METRIC SPACES KEITH CONRAD 1. Introduction As calculus developed, eventually turning into analysis, concepts first explored on the real line (e.g., a limit of a sequence of real numbers) eventually extended
METRIC SPACES KEITH CONRAD 1. Introduction As calculus developed, eventually turning into analysis, concepts first explored on the real line (e.g., a limit of a sequence of real numbers) eventually extended
Problem Set 2: Solutions Math 201A: Fall 2016
 Problem Set 2: s Math 201A: Fall 2016 Problem 1. (a) Prove that a closed subset of a complete metric space is complete. (b) Prove that a closed subset of a compact metric space is compact. (c) Prove that
Problem Set 2: s Math 201A: Fall 2016 Problem 1. (a) Prove that a closed subset of a complete metric space is complete. (b) Prove that a closed subset of a compact metric space is compact. (c) Prove that
U e = E (U\E) e E e + U\E e. (1.6)
 e E e + U\E e. (1.6)") 12 1 Lebesgue Measure 1.2 Lebesgue Measure In Section 1.1 we defined the exterior Lebesgue measure of every subset of R d. Unfortunately, a major disadvantage of exterior measure is that it does not satisfy
12 1 Lebesgue Measure 1.2 Lebesgue Measure In Section 1.1 we defined the exterior Lebesgue measure of every subset of R d. Unfortunately, a major disadvantage of exterior measure is that it does not satisfy
Some Background Material
 Chapter 1 Some Background Material In the first chapter, we present a quick review of elementary - but important - material as a way of dipping our toes in the water. This chapter also introduces important
Chapter 1 Some Background Material In the first chapter, we present a quick review of elementary - but important - material as a way of dipping our toes in the water. This chapter also introduces important
MATH 51H Section 4. October 16, Recall what it means for a function between metric spaces to be continuous:
 MATH 51H Section 4 October 16, 2015 1 Continuity Recall what it means for a function between metric spaces to be continuous: Definition. Let (X, d X ), (Y, d Y ) be metric spaces. A function f : X Y is
MATH 51H Section 4 October 16, 2015 1 Continuity Recall what it means for a function between metric spaces to be continuous: Definition. Let (X, d X ), (Y, d Y ) be metric spaces. A function f : X Y is
Mathematics for Economists
 Mathematics for Economists Victor Filipe Sao Paulo School of Economics FGV Metric Spaces: Basic Definitions Victor Filipe (EESP/FGV) Mathematics for Economists Jan.-Feb. 2017 1 / 34 Definitions and Examples
Mathematics for Economists Victor Filipe Sao Paulo School of Economics FGV Metric Spaces: Basic Definitions Victor Filipe (EESP/FGV) Mathematics for Economists Jan.-Feb. 2017 1 / 34 Definitions and Examples
Lecture Notes in Advanced Calculus 1 (80315) Raz Kupferman Institute of Mathematics The Hebrew University
 Raz Kupferman Institute of Mathematics The Hebrew University") Lecture Notes in Advanced Calculus 1 (80315) Raz Kupferman Institute of Mathematics The Hebrew University February 7, 2007 2 Contents 1 Metric Spaces 1 1.1 Basic definitions...........................
Lecture Notes in Advanced Calculus 1 (80315) Raz Kupferman Institute of Mathematics The Hebrew University February 7, 2007 2 Contents 1 Metric Spaces 1 1.1 Basic definitions...........................
The small ball property in Banach spaces (quantitative results)
") The small ball property in Banach spaces (quantitative results) Ehrhard Behrends Abstract A metric space (M, d) is said to have the small ball property (sbp) if for every ε 0 > 0 there exists a sequence
The small ball property in Banach spaces (quantitative results) Ehrhard Behrends Abstract A metric space (M, d) is said to have the small ball property (sbp) if for every ε 0 > 0 there exists a sequence
Introduction to Real Analysis Alternative Chapter 1
 Christopher Heil Introduction to Real Analysis Alternative Chapter 1 A Primer on Norms and Banach Spaces Last Updated: March 10, 2018 c 2018 by Christopher Heil Chapter 1 A Primer on Norms and Banach Spaces
Christopher Heil Introduction to Real Analysis Alternative Chapter 1 A Primer on Norms and Banach Spaces Last Updated: March 10, 2018 c 2018 by Christopher Heil Chapter 1 A Primer on Norms and Banach Spaces
Chapter 2 Metric Spaces
 Chapter 2 Metric Spaces The purpose of this chapter is to present a summary of some basic properties of metric and topological spaces that play an important role in the main body of the book. 2.1 Metrics
Chapter 2 Metric Spaces The purpose of this chapter is to present a summary of some basic properties of metric and topological spaces that play an important role in the main body of the book. 2.1 Metrics
Set, functions and Euclidean space. Seungjin Han
 Set, functions and Euclidean space Seungjin Han September, 2018 1 Some Basics LOGIC A is necessary for B : If B holds, then A holds. B A A B is the contraposition of B A. A is sufficient for B: If A holds,
Set, functions and Euclidean space Seungjin Han September, 2018 1 Some Basics LOGIC A is necessary for B : If B holds, then A holds. B A A B is the contraposition of B A. A is sufficient for B: If A holds,
R N Completeness and Compactness 1
 John Nachbar Washington University in St. Louis October 3, 2017 R N Completeness and Compactness 1 1 Completeness in R. As a preliminary step, I first record the following compactness-like theorem about
John Nachbar Washington University in St. Louis October 3, 2017 R N Completeness and Compactness 1 1 Completeness in R. As a preliminary step, I first record the following compactness-like theorem about
Maths 212: Homework Solutions
 Maths 212: Homework Solutions 1. The definition of A ensures that x π for all x A, so π is an upper bound of A. To show it is the least upper bound, suppose x < π and consider two cases. If x < 1, then
Maths 212: Homework Solutions 1. The definition of A ensures that x π for all x A, so π is an upper bound of A. To show it is the least upper bound, suppose x < π and consider two cases. If x < 1, then
Definition 2.1. A metric (or distance function) defined on a non-empty set X is a function d: X X R that satisfies: For all x, y, and z in X :
 defined on a non-empty set X is a function d: X X R that satisfies: For all x, y, and z in X :") MATH 337 Metric Spaces Dr. Neal, WKU Let X be a non-empty set. The elements of X shall be called points. We shall define the general means of determining the distance between two points. Throughout we
MATH 337 Metric Spaces Dr. Neal, WKU Let X be a non-empty set. The elements of X shall be called points. We shall define the general means of determining the distance between two points. Throughout we
CLASS NOTES FOR APRIL 14, 2000
 CLASS NOTES FOR APRIL 14, 2000 Announcement: Section 1.2, Questions 3,5 have been deferred from Assignment 1 to Assignment 2. Section 1.4, Question 5 has been dropped entirely. 1. Review of Wednesday class
CLASS NOTES FOR APRIL 14, 2000 Announcement: Section 1.2, Questions 3,5 have been deferred from Assignment 1 to Assignment 2. Section 1.4, Question 5 has been dropped entirely. 1. Review of Wednesday class
Real Analysis Math 131AH Rudin, Chapter #1. Dominique Abdi
 Real Analysis Math 3AH Rudin, Chapter # Dominique Abdi.. If r is rational (r 0) and x is irrational, prove that r + x and rx are irrational. Solution. Assume the contrary, that r+x and rx are rational.
Real Analysis Math 3AH Rudin, Chapter # Dominique Abdi.. If r is rational (r 0) and x is irrational, prove that r + x and rx are irrational. Solution. Assume the contrary, that r+x and rx are rational.
Metric Spaces and Topology
 Chapter 2 Metric Spaces and Topology From an engineering perspective, the most important way to construct a topology on a set is to define the topology in terms of a metric on the set. This approach underlies
Chapter 2 Metric Spaces and Topology From an engineering perspective, the most important way to construct a topology on a set is to define the topology in terms of a metric on the set. This approach underlies
Mid Term-1 : Practice problems
 Mid Term-1 : Practice problems These problems are meant only to provide practice; they do not necessarily reflect the difficulty level of the problems in the exam. The actual exam problems are likely to
Mid Term-1 : Practice problems These problems are meant only to provide practice; they do not necessarily reflect the difficulty level of the problems in the exam. The actual exam problems are likely to
LECTURE 15: COMPLETENESS AND CONVEXITY
 LECTURE 15: COMPLETENESS AND CONVEXITY 1. The Hopf-Rinow Theorem Recall that a Riemannian manifold (M, g) is called geodesically complete if the maximal defining interval of any geodesic is R. On the other
LECTURE 15: COMPLETENESS AND CONVEXITY 1. The Hopf-Rinow Theorem Recall that a Riemannian manifold (M, g) is called geodesically complete if the maximal defining interval of any geodesic is R. On the other
MATH 4200 HW: PROBLEM SET FOUR: METRIC SPACES
 MATH 4200 HW: PROBLEM SET FOUR: METRIC SPACES PETE L. CLARK 4. Metric Spaces (no more lulz) Directions: This week, please solve any seven problems. Next week, please solve seven more. Starred parts of
MATH 4200 HW: PROBLEM SET FOUR: METRIC SPACES PETE L. CLARK 4. Metric Spaces (no more lulz) Directions: This week, please solve any seven problems. Next week, please solve seven more. Starred parts of
Math LM (24543) Lectures 01
 Lectures 01") Math 32300 LM (24543) Lectures 01 Ethan Akin Office: NAC 6/287 Phone: 650-5136 Email: ethanakin@earthlink.net Spring, 2018 Contents Introduction, Ross Chapter 1 and Appendix The Natural Numbers N and The
Math 32300 LM (24543) Lectures 01 Ethan Akin Office: NAC 6/287 Phone: 650-5136 Email: ethanakin@earthlink.net Spring, 2018 Contents Introduction, Ross Chapter 1 and Appendix The Natural Numbers N and The
A VERY BRIEF REVIEW OF MEASURE THEORY
 A VERY BRIEF REVIEW OF MEASURE THEORY A brief philosophical discussion. Measure theory, as much as any branch of mathematics, is an area where it is important to be acquainted with the basic notions and
A VERY BRIEF REVIEW OF MEASURE THEORY A brief philosophical discussion. Measure theory, as much as any branch of mathematics, is an area where it is important to be acquainted with the basic notions and
MATH 202B - Problem Set 5
 MATH 202B - Problem Set 5 Walid Krichene (23265217) March 6, 2013 (5.1) Show that there exists a continuous function F : [0, 1] R which is monotonic on no interval of positive length. proof We know there
MATH 202B - Problem Set 5 Walid Krichene (23265217) March 6, 2013 (5.1) Show that there exists a continuous function F : [0, 1] R which is monotonic on no interval of positive length. proof We know there
Chapter II. Metric Spaces and the Topology of C
 II.1. Definitions and Examples of Metric Spaces 1 Chapter II. Metric Spaces and the Topology of C Note. In this chapter we study, in a general setting, a space (really, just a set) in which we can measure
II.1. Definitions and Examples of Metric Spaces 1 Chapter II. Metric Spaces and the Topology of C Note. In this chapter we study, in a general setting, a space (really, just a set) in which we can measure
Continuity. Matt Rosenzweig
 Continuity Matt Rosenzweig Contents 1 Continuity 1 1.1 Rudin Chapter 4 Exercises........................................ 1 1.1.1 Exercise 1............................................. 1 1.1.2 Exercise
Continuity Matt Rosenzweig Contents 1 Continuity 1 1.1 Rudin Chapter 4 Exercises........................................ 1 1.1.1 Exercise 1............................................. 1 1.1.2 Exercise
Part III. 10 Topological Space Basics. Topological Spaces
 Part III 10 Topological Space Basics Topological Spaces Using the metric space results above as motivation we will axiomatize the notion of being an open set to more general settings. Definition 10.1.
Part III 10 Topological Space Basics Topological Spaces Using the metric space results above as motivation we will axiomatize the notion of being an open set to more general settings. Definition 10.1.
REVIEW OF ESSENTIAL MATH 346 TOPICS
 REVIEW OF ESSENTIAL MATH 346 TOPICS 1. AXIOMATIC STRUCTURE OF R Doğan Çömez The real number system is a complete ordered field, i.e., it is a set R which is endowed with addition and multiplication operations
REVIEW OF ESSENTIAL MATH 346 TOPICS 1. AXIOMATIC STRUCTURE OF R Doğan Çömez The real number system is a complete ordered field, i.e., it is a set R which is endowed with addition and multiplication operations
The Heine-Borel and Arzela-Ascoli Theorems
 The Heine-Borel and Arzela-Ascoli Theorems David Jekel October 29, 2016 This paper explains two important results about compactness, the Heine- Borel theorem and the Arzela-Ascoli theorem. We prove them
The Heine-Borel and Arzela-Ascoli Theorems David Jekel October 29, 2016 This paper explains two important results about compactness, the Heine- Borel theorem and the Arzela-Ascoli theorem. We prove them
Econ Lecture 3. Outline. 1. Metric Spaces and Normed Spaces 2. Convergence of Sequences in Metric Spaces 3. Sequences in R and R n
 Econ 204 2011 Lecture 3 Outline 1. Metric Spaces and Normed Spaces 2. Convergence of Sequences in Metric Spaces 3. Sequences in R and R n 1 Metric Spaces and Metrics Generalize distance and length notions
Econ 204 2011 Lecture 3 Outline 1. Metric Spaces and Normed Spaces 2. Convergence of Sequences in Metric Spaces 3. Sequences in R and R n 1 Metric Spaces and Metrics Generalize distance and length notions
Real Analysis. Joe Patten August 12, 2018
 Real Analysis Joe Patten August 12, 2018 1 Relations and Functions 1.1 Relations A (binary) relation, R, from set A to set B is a subset of A B. Since R is a subset of A B, it is a set of ordered pairs.
Real Analysis Joe Patten August 12, 2018 1 Relations and Functions 1.1 Relations A (binary) relation, R, from set A to set B is a subset of A B. Since R is a subset of A B, it is a set of ordered pairs.
01. Review of metric spaces and point-set topology. 1. Euclidean spaces
 (October 3, 017) 01. Review of metric spaces and point-set topology Paul Garrett garrett@math.umn.edu http://www.math.umn.edu/ garrett/ [This document is http://www.math.umn.edu/ garrett/m/real/notes 017-18/01
(October 3, 017) 01. Review of metric spaces and point-set topology Paul Garrett garrett@math.umn.edu http://www.math.umn.edu/ garrett/ [This document is http://www.math.umn.edu/ garrett/m/real/notes 017-18/01
Economics 204 Fall 2012 Problem Set 3 Suggested Solutions
 Economics 204 Fall 2012 Problem Set 3 Suggested Solutions 1. Give an example of each of the following (and prove that your example indeed works): (a) A complete metric space that is bounded but not compact.
Economics 204 Fall 2012 Problem Set 3 Suggested Solutions 1. Give an example of each of the following (and prove that your example indeed works): (a) A complete metric space that is bounded but not compact.
Analysis Comprehensive Exam Questions Fall F(x) = 1 x. f(t)dt. t 1 2. tf 2 (t)dt. and g(t, x) = 2 t. 2 t
 = 1 x. f(t)dt. t 1 2. tf 2 (t)dt. and g(t, x) = 2 t. 2 t") Analysis Comprehensive Exam Questions Fall 2. Let f L 2 (, ) be given. (a) Prove that ( x 2 f(t) dt) 2 x x t f(t) 2 dt. (b) Given part (a), prove that F L 2 (, ) 2 f L 2 (, ), where F(x) = x (a) Using
Analysis Comprehensive Exam Questions Fall 2. Let f L 2 (, ) be given. (a) Prove that ( x 2 f(t) dt) 2 x x t f(t) 2 dt. (b) Given part (a), prove that F L 2 (, ) 2 f L 2 (, ), where F(x) = x (a) Using
Analysis Finite and Infinite Sets The Real Numbers The Cantor Set
 Analysis Finite and Infinite Sets Definition. An initial segment is {n N n n 0 }. Definition. A finite set can be put into one-to-one correspondence with an initial segment. The empty set is also considered
Analysis Finite and Infinite Sets Definition. An initial segment is {n N n n 0 }. Definition. A finite set can be put into one-to-one correspondence with an initial segment. The empty set is also considered
Math 320-2: Final Exam Practice Solutions Northwestern University, Winter 2015
 Math 30-: Final Exam Practice Solutions Northwestern University, Winter 015 1. Give an example of each of the following. No justification is needed. (a) A closed and bounded subset of C[0, 1] which is
Math 30-: Final Exam Practice Solutions Northwestern University, Winter 015 1. Give an example of each of the following. No justification is needed. (a) A closed and bounded subset of C[0, 1] which is
EC 521 MATHEMATICAL METHODS FOR ECONOMICS. Lecture 1: Preliminaries
 EC 521 MATHEMATICAL METHODS FOR ECONOMICS Lecture 1: Preliminaries Murat YILMAZ Boğaziçi University In this lecture we provide some basic facts from both Linear Algebra and Real Analysis, which are going
EC 521 MATHEMATICAL METHODS FOR ECONOMICS Lecture 1: Preliminaries Murat YILMAZ Boğaziçi University In this lecture we provide some basic facts from both Linear Algebra and Real Analysis, which are going
What to remember about metric spaces
 Division of the Humanities and Social Sciences What to remember about metric spaces KC Border These notes are (I hope) a gentle introduction to the topological concepts used in economic theory. If the
Division of the Humanities and Social Sciences What to remember about metric spaces KC Border These notes are (I hope) a gentle introduction to the topological concepts used in economic theory. If the
Math 320-2: Midterm 2 Practice Solutions Northwestern University, Winter 2015
 Math 30-: Midterm Practice Solutions Northwestern University, Winter 015 1. Give an example of each of the following. No justification is needed. (a) A metric on R with respect to which R is bounded. (b)
Math 30-: Midterm Practice Solutions Northwestern University, Winter 015 1. Give an example of each of the following. No justification is needed. (a) A metric on R with respect to which R is bounded. (b)
Math 421, Homework #7 Solutions. We can then us the triangle inequality to find for k N that (x k + y k ) (L + M) = (x k L) + (y k M) x k L + y k M
 (L + M) = (x k L) + (y k M) x k L + y k M") Math 421, Homework #7 Solutions (1) Let {x k } and {y k } be convergent sequences in R n, and assume that lim k x k = L and that lim k y k = M. Prove directly from definition 9.1 (i.e. don t use Theorem
Math 421, Homework #7 Solutions (1) Let {x k } and {y k } be convergent sequences in R n, and assume that lim k x k = L and that lim k y k = M. Prove directly from definition 9.1 (i.e. don t use Theorem
Characterisation of Accumulation Points. Convergence in Metric Spaces. Characterisation of Closed Sets. Characterisation of Closed Sets
 Convergence in Metric Spaces Functional Analysis Lecture 3: Convergence and Continuity in Metric Spaces Bengt Ove Turesson September 4, 2016 Suppose that (X, d) is a metric space. A sequence (x n ) X is
Convergence in Metric Spaces Functional Analysis Lecture 3: Convergence and Continuity in Metric Spaces Bengt Ove Turesson September 4, 2016 Suppose that (X, d) is a metric space. A sequence (x n ) X is
THEOREMS, ETC., FOR MATH 515
 THEOREMS, ETC., FOR MATH 515 Proposition 1 (=comment on page 17). If A is an algebra, then any finite union or finite intersection of sets in A is also in A. Proposition 2 (=Proposition 1.1). For every
THEOREMS, ETC., FOR MATH 515 Proposition 1 (=comment on page 17). If A is an algebra, then any finite union or finite intersection of sets in A is also in A. Proposition 2 (=Proposition 1.1). For every
SOLUTIONS TO SOME PROBLEMS
 23 FUNCTIONAL ANALYSIS Spring 23 SOLUTIONS TO SOME PROBLEMS Warning:These solutions may contain errors!! PREPARED BY SULEYMAN ULUSOY PROBLEM 1. Prove that a necessary and sufficient condition that the
23 FUNCTIONAL ANALYSIS Spring 23 SOLUTIONS TO SOME PROBLEMS Warning:These solutions may contain errors!! PREPARED BY SULEYMAN ULUSOY PROBLEM 1. Prove that a necessary and sufficient condition that the
MAS331: Metric Spaces Problems on Chapter 1
 MAS331: Metric Spaces Problems on Chapter 1 1. In R 3, find d 1 ((3, 1, 4), (2, 7, 1)), d 2 ((3, 1, 4), (2, 7, 1)) and d ((3, 1, 4), (2, 7, 1)). 2. In R 4, show that d 1 ((4, 4, 4, 6), (0, 0, 0, 0)) =
MAS331: Metric Spaces Problems on Chapter 1 1. In R 3, find d 1 ((3, 1, 4), (2, 7, 1)), d 2 ((3, 1, 4), (2, 7, 1)) and d ((3, 1, 4), (2, 7, 1)). 2. In R 4, show that d 1 ((4, 4, 4, 6), (0, 0, 0, 0)) =
2. Metric Spaces. 2.1 Definitions etc.
 2. Metric Spaces 2.1 Definitions etc. The procedure in Section for regarding R as a topological space may be generalized to many other sets in which there is some kind of distance (formally, sets with
2. Metric Spaces 2.1 Definitions etc. The procedure in Section for regarding R as a topological space may be generalized to many other sets in which there is some kind of distance (formally, sets with
CHAPTER 1. Metric Spaces. 1. Definition and examples
 CHAPTER Metric Spaces. Definition and examples Metric spaces generalize and clarify the notion of distance in the real line. The definitions will provide us with a useful tool for more general applications
CHAPTER Metric Spaces. Definition and examples Metric spaces generalize and clarify the notion of distance in the real line. The definitions will provide us with a useful tool for more general applications
2 Topology of a Metric Space
 2 Topology of a Metric Space The real number system has two types of properties. The first type are algebraic properties, dealing with addition, multiplication and so on. The other type, called topological
2 Topology of a Metric Space The real number system has two types of properties. The first type are algebraic properties, dealing with addition, multiplication and so on. The other type, called topological
MAT 570 REAL ANALYSIS LECTURE NOTES. Contents. 1. Sets Functions Countability Axiom of choice Equivalence relations 9
 MAT 570 REAL ANALYSIS LECTURE NOTES PROFESSOR: JOHN QUIGG SEMESTER: FALL 204 Contents. Sets 2 2. Functions 5 3. Countability 7 4. Axiom of choice 8 5. Equivalence relations 9 6. Real numbers 9 7. Extended
MAT 570 REAL ANALYSIS LECTURE NOTES PROFESSOR: JOHN QUIGG SEMESTER: FALL 204 Contents. Sets 2 2. Functions 5 3. Countability 7 4. Axiom of choice 8 5. Equivalence relations 9 6. Real numbers 9 7. Extended
Existence and Uniqueness
 Chapter 3 Existence and Uniqueness An intellect which at a certain moment would know all forces that set nature in motion, and all positions of all items of which nature is composed, if this intellect
Chapter 3 Existence and Uniqueness An intellect which at a certain moment would know all forces that set nature in motion, and all positions of all items of which nature is composed, if this intellect
Contents Ordered Fields... 2 Ordered sets and fields... 2 Construction of the Reals 1: Dedekind Cuts... 2 Metric Spaces... 3
 Analysis Math Notes Study Guide Real Analysis Contents Ordered Fields 2 Ordered sets and fields 2 Construction of the Reals 1: Dedekind Cuts 2 Metric Spaces 3 Metric Spaces 3 Definitions 4 Separability
Analysis Math Notes Study Guide Real Analysis Contents Ordered Fields 2 Ordered sets and fields 2 Construction of the Reals 1: Dedekind Cuts 2 Metric Spaces 3 Metric Spaces 3 Definitions 4 Separability
Math 201 Topology I. Lecture notes of Prof. Hicham Gebran
 Math 201 Topology I Lecture notes of Prof. Hicham Gebran hicham.gebran@yahoo.com Lebanese University, Fanar, Fall 2015-2016 http://fs2.ul.edu.lb/math http://hichamgebran.wordpress.com 2 Introduction and
Math 201 Topology I Lecture notes of Prof. Hicham Gebran hicham.gebran@yahoo.com Lebanese University, Fanar, Fall 2015-2016 http://fs2.ul.edu.lb/math http://hichamgebran.wordpress.com 2 Introduction and
THE CONTRACTION MAPPING THEOREM, II
 THE CONTRACTION MAPPING THEOREM, II KEITH CONRAD 1. Introduction In part I, we met the contraction mapping theorem and an application of it to solving nonlinear differential equations. Here we will discuss
THE CONTRACTION MAPPING THEOREM, II KEITH CONRAD 1. Introduction In part I, we met the contraction mapping theorem and an application of it to solving nonlinear differential equations. Here we will discuss
4 Countability axioms
 4 COUNTABILITY AXIOMS 4 Countability axioms Definition 4.1. Let X be a topological space X is said to be first countable if for any x X, there is a countable basis for the neighborhoods of x. X is said
4 COUNTABILITY AXIOMS 4 Countability axioms Definition 4.1. Let X be a topological space X is said to be first countable if for any x X, there is a countable basis for the neighborhoods of x. X is said
Math 4317 : Real Analysis I Mid-Term Exam 1 25 September 2012
 Instructions: Answer all of the problems. Math 4317 : Real Analysis I Mid-Term Exam 1 25 September 2012 Definitions (2 points each) 1. State the definition of a metric space. A metric space (X, d) is set
Instructions: Answer all of the problems. Math 4317 : Real Analysis I Mid-Term Exam 1 25 September 2012 Definitions (2 points each) 1. State the definition of a metric space. A metric space (X, d) is set
Chapter 2. Metric Spaces. 2.1 Metric Spaces
 Chapter 2 Metric Spaces ddddddddddddddddddddddddd ddddddd dd ddd A metric space is a mathematical object in which the distance between two points is meaningful. Metric spaces constitute an important class
Chapter 2 Metric Spaces ddddddddddddddddddddddddd ddddddd dd ddd A metric space is a mathematical object in which the distance between two points is meaningful. Metric spaces constitute an important class
II - REAL ANALYSIS. This property gives us a way to extend the notion of content to finite unions of rectangles: we define
 1 Measures 1.1 Jordan content in R N II - REAL ANALYSIS Let I be an interval in R. Then its 1-content is defined as c 1 (I) := b a if I is bounded with endpoints a, b. If I is unbounded, we define c 1
1 Measures 1.1 Jordan content in R N II - REAL ANALYSIS Let I be an interval in R. Then its 1-content is defined as c 1 (I) := b a if I is bounded with endpoints a, b. If I is unbounded, we define c 1
Overview of normed linear spaces
 20 Chapter 2 Overview of normed linear spaces Starting from this chapter, we begin examining linear spaces with at least one extra structure (topology or geometry). We assume linearity; this is a natural
20 Chapter 2 Overview of normed linear spaces Starting from this chapter, we begin examining linear spaces with at least one extra structure (topology or geometry). We assume linearity; this is a natural
Math 341: Convex Geometry. Xi Chen
 Math 341: Convex Geometry Xi Chen 479 Central Academic Building, University of Alberta, Edmonton, Alberta T6G 2G1, CANADA E-mail address: xichen@math.ualberta.ca CHAPTER 1 Basics 1. Euclidean Geometry
Math 341: Convex Geometry Xi Chen 479 Central Academic Building, University of Alberta, Edmonton, Alberta T6G 2G1, CANADA E-mail address: xichen@math.ualberta.ca CHAPTER 1 Basics 1. Euclidean Geometry
Introduction to Dynamical Systems
 Introduction to Dynamical Systems France-Kosovo Undergraduate Research School of Mathematics March 2017 This introduction to dynamical systems was a course given at the march 2017 edition of the France
Introduction to Dynamical Systems France-Kosovo Undergraduate Research School of Mathematics March 2017 This introduction to dynamical systems was a course given at the march 2017 edition of the France
Convex Analysis and Economic Theory Winter 2018
 Division of the Humanities and Social Sciences Ec 181 KC Border Convex Analysis and Economic Theory Winter 2018 Supplement A: Mathematical background A.1 Extended real numbers The extended real number
Division of the Humanities and Social Sciences Ec 181 KC Border Convex Analysis and Economic Theory Winter 2018 Supplement A: Mathematical background A.1 Extended real numbers The extended real number
Simple Abelian Topological Groups. Luke Dominic Bush Hipwood. Mathematics Institute
 M A E NS G I T A T MOLEM UNIVERSITAS WARWICENSIS Simple Abelian Topological Groups by Luke Dominic Bush Hipwood supervised by Dr Dmitriy Rumynin 4th Year Project Submitted to The University of Warwick
M A E NS G I T A T MOLEM UNIVERSITAS WARWICENSIS Simple Abelian Topological Groups by Luke Dominic Bush Hipwood supervised by Dr Dmitriy Rumynin 4th Year Project Submitted to The University of Warwick
Topological properties of Z p and Q p and Euclidean models
 Topological properties of Z p and Q p and Euclidean models Samuel Trautwein, Esther Röder, Giorgio Barozzi November 3, 20 Topology of Q p vs Topology of R Both R and Q p are normed fields and complete
Topological properties of Z p and Q p and Euclidean models Samuel Trautwein, Esther Röder, Giorgio Barozzi November 3, 20 Topology of Q p vs Topology of R Both R and Q p are normed fields and complete
Real Analysis Notes. Thomas Goller
 Real Analysis Notes Thomas Goller September 4, 2011 Contents 1 Abstract Measure Spaces 2 1.1 Basic Definitions........................... 2 1.2 Measurable Functions........................ 2 1.3 Integration..............................
Real Analysis Notes Thomas Goller September 4, 2011 Contents 1 Abstract Measure Spaces 2 1.1 Basic Definitions........................... 2 1.2 Measurable Functions........................ 2 1.3 Integration..............................
*Room 3.13 in Herschel Building
 MAS3706: Topology Dr. Zinaida Lykova School of Mathematics, Statistics and Physics Newcastle University *Room 3.13 in Herschel Building These lectures concern metric and topological spaces and continuous
MAS3706: Topology Dr. Zinaida Lykova School of Mathematics, Statistics and Physics Newcastle University *Room 3.13 in Herschel Building These lectures concern metric and topological spaces and continuous
Part V. 17 Introduction: What are measures and why measurable sets. Lebesgue Integration Theory
 Part V 7 Introduction: What are measures and why measurable sets Lebesgue Integration Theory Definition 7. (Preliminary). A measure on a set is a function :2 [ ] such that. () = 2. If { } = is a finite
Part V 7 Introduction: What are measures and why measurable sets Lebesgue Integration Theory Definition 7. (Preliminary). A measure on a set is a function :2 [ ] such that. () = 2. If { } = is a finite
Introduction to Topology
 Introduction to Topology Randall R. Holmes Auburn University Typeset by AMS-TEX Chapter 1. Metric Spaces 1. Definition and Examples. As the course progresses we will need to review some basic notions about
Introduction to Topology Randall R. Holmes Auburn University Typeset by AMS-TEX Chapter 1. Metric Spaces 1. Definition and Examples. As the course progresses we will need to review some basic notions about
Functional Analysis. Franck Sueur Metric spaces Definitions Completeness Compactness Separability...
 Functional Analysis Franck Sueur 2018-2019 Contents 1 Metric spaces 1 1.1 Definitions........................................ 1 1.2 Completeness...................................... 3 1.3 Compactness......................................
Functional Analysis Franck Sueur 2018-2019 Contents 1 Metric spaces 1 1.1 Definitions........................................ 1 1.2 Completeness...................................... 3 1.3 Compactness......................................
Topology. Xiaolong Han. Department of Mathematics, California State University, Northridge, CA 91330, USA address:
 Topology Xiaolong Han Department of Mathematics, California State University, Northridge, CA 91330, USA E-mail address: Xiaolong.Han@csun.edu Remark. You are entitled to a reward of 1 point toward a homework
Topology Xiaolong Han Department of Mathematics, California State University, Northridge, CA 91330, USA E-mail address: Xiaolong.Han@csun.edu Remark. You are entitled to a reward of 1 point toward a homework
Lecture 3. Econ August 12
 Lecture 3 Econ 2001 2015 August 12 Lecture 3 Outline 1 Metric and Metric Spaces 2 Norm and Normed Spaces 3 Sequences and Subsequences 4 Convergence 5 Monotone and Bounded Sequences Announcements: - Friday
Lecture 3 Econ 2001 2015 August 12 Lecture 3 Outline 1 Metric and Metric Spaces 2 Norm and Normed Spaces 3 Sequences and Subsequences 4 Convergence 5 Monotone and Bounded Sequences Announcements: - Friday
Fourth Week: Lectures 10-12
 Fourth Week: Lectures 10-12 Lecture 10 The fact that a power series p of positive radius of convergence defines a function inside its disc of convergence via substitution is something that we cannot ignore
Fourth Week: Lectures 10-12 Lecture 10 The fact that a power series p of positive radius of convergence defines a function inside its disc of convergence via substitution is something that we cannot ignore
Appendix B Convex analysis
 This version: 28/02/2014 Appendix B Convex analysis In this appendix we review a few basic notions of convexity and related notions that will be important for us at various times. B.1 The Hausdorff distance
This version: 28/02/2014 Appendix B Convex analysis In this appendix we review a few basic notions of convexity and related notions that will be important for us at various times. B.1 The Hausdorff distance
Sequence of maximal distance codes in graphs or other metric spaces
 Electronic Journal of Graph Theory and Applications 1 (2) (2013), 118 124 Sequence of maximal distance codes in graphs or other metric spaces C. Delorme University Paris Sud 91405 Orsay CEDEX - France.
Electronic Journal of Graph Theory and Applications 1 (2) (2013), 118 124 Sequence of maximal distance codes in graphs or other metric spaces C. Delorme University Paris Sud 91405 Orsay CEDEX - France.
The Arzelà-Ascoli Theorem
 John Nachbar Washington University March 27, 2016 The Arzelà-Ascoli Theorem The Arzelà-Ascoli Theorem gives sufficient conditions for compactness in certain function spaces. Among other things, it helps
John Nachbar Washington University March 27, 2016 The Arzelà-Ascoli Theorem The Arzelà-Ascoli Theorem gives sufficient conditions for compactness in certain function spaces. Among other things, it helps
15 Real Analysis II Sequences and Limits , Math for Economists Fall 2004 Lecture Notes, 10/21/2004
 14.102, Math for Economists Fall 2004 Lecture Notes, 10/21/2004 These notes are primarily based on those written by Andrei Bremzen for 14.102 in 2002/3, and by Marek Pycia for the MIT Math Camp in 2003/4.
14.102, Math for Economists Fall 2004 Lecture Notes, 10/21/2004 These notes are primarily based on those written by Andrei Bremzen for 14.102 in 2002/3, and by Marek Pycia for the MIT Math Camp in 2003/4.
Topology, Math 581, Fall 2017 last updated: November 24, Topology 1, Math 581, Fall 2017: Notes and homework Krzysztof Chris Ciesielski
 Topology, Math 581, Fall 2017 last updated: November 24, 2017 1 Topology 1, Math 581, Fall 2017: Notes and homework Krzysztof Chris Ciesielski Class of August 17: Course and syllabus overview. Topology
Topology, Math 581, Fall 2017 last updated: November 24, 2017 1 Topology 1, Math 581, Fall 2017: Notes and homework Krzysztof Chris Ciesielski Class of August 17: Course and syllabus overview. Topology
Metric Spaces Math 413 Honors Project
 Metric Spaces Math 413 Honors Project 1 Metric Spaces Definition 1.1 Let X be a set. A metric on X is a function d : X X R such that for all x, y, z X: i) d(x, y) = d(y, x); ii) d(x, y) = 0 if and only
Metric Spaces Math 413 Honors Project 1 Metric Spaces Definition 1.1 Let X be a set. A metric on X is a function d : X X R such that for all x, y, z X: i) d(x, y) = d(y, x); ii) d(x, y) = 0 if and only
1 Lecture 4: Set topology on metric spaces, 8/17/2012
 Summer Jump-Start Program for Analysis, 01 Song-Ying Li 1 Lecture : Set topology on metric spaces, 8/17/01 Definition 1.1. Let (X, d) be a metric space; E is a subset of X. Then: (i) x E is an interior
Summer Jump-Start Program for Analysis, 01 Song-Ying Li 1 Lecture : Set topology on metric spaces, 8/17/01 Definition 1.1. Let (X, d) be a metric space; E is a subset of X. Then: (i) x E is an interior
Metric Spaces Math 413 Honors Project
 Metric Spaces Math 413 Honors Project 1 Metric Spaces Definition 1.1 Let X be a set. A metric on X is a function d : X X R such that for all x, y, z X: i) d(x, y) = d(y, x); ii) d(x, y) = 0 if and only
Metric Spaces Math 413 Honors Project 1 Metric Spaces Definition 1.1 Let X be a set. A metric on X is a function d : X X R such that for all x, y, z X: i) d(x, y) = d(y, x); ii) d(x, y) = 0 if and only
MA677 Assignment #3 Morgan Schreffler Due 09/19/12 Exercise 1 Using Hölder s inequality, prove Minkowski s inequality for f, g L p (R d ), p 1:
, p 1:") Exercise 1 Using Hölder s inequality, prove Minkowski s inequality for f, g L p (R d ), p 1: f + g p f p + g p. Proof. If f, g L p (R d ), then since f(x) + g(x) max {f(x), g(x)}, we have f(x) + g(x) p
Exercise 1 Using Hölder s inequality, prove Minkowski s inequality for f, g L p (R d ), p 1: f + g p f p + g p. Proof. If f, g L p (R d ), then since f(x) + g(x) max {f(x), g(x)}, we have f(x) + g(x) p
Completeness and quasi-completeness. 1. Products, limits, coproducts, colimits
 (April 24, 2014) Completeness and quasi-completeness Paul Garrett garrett@math.umn.edu http://www.math.umn.edu/ garrett/ [This document is http://www.math.umn.edu/ garrett/m/fun/notes 2012-13/07d quasi-completeness.pdf]
(April 24, 2014) Completeness and quasi-completeness Paul Garrett garrett@math.umn.edu http://www.math.umn.edu/ garrett/ [This document is http://www.math.umn.edu/ garrett/m/fun/notes 2012-13/07d quasi-completeness.pdf]
Discrete Geometry. Problem 1. Austin Mohr. April 26, 2012
 Discrete Geometry Austin Mohr April 26, 2012 Problem 1 Theorem 1 (Linear Programming Duality). Suppose x, y, b, c R n and A R n n, Ax b, x 0, A T y c, and y 0. If x maximizes c T x and y minimizes b T
Discrete Geometry Austin Mohr April 26, 2012 Problem 1 Theorem 1 (Linear Programming Duality). Suppose x, y, b, c R n and A R n n, Ax b, x 0, A T y c, and y 0. If x maximizes c T x and y minimizes b T
Near convexity, metric convexity, and convexity
 Near convexity, metric convexity, and convexity Fred Richman Florida Atlantic University Boca Raton, FL 33431 28 February 2005 Abstract It is shown that a subset of a uniformly convex normed space is nearly
Near convexity, metric convexity, and convexity Fred Richman Florida Atlantic University Boca Raton, FL 33431 28 February 2005 Abstract It is shown that a subset of a uniformly convex normed space is nearly
MATH 54 - TOPOLOGY SUMMER 2015 FINAL EXAMINATION. Problem 1
 MATH 54 - TOPOLOGY SUMMER 2015 FINAL EXAMINATION ELEMENTS OF SOLUTION Problem 1 1. Let X be a Hausdorff space and K 1, K 2 disjoint compact subsets of X. Prove that there exist disjoint open sets U 1 and
MATH 54 - TOPOLOGY SUMMER 2015 FINAL EXAMINATION ELEMENTS OF SOLUTION Problem 1 1. Let X be a Hausdorff space and K 1, K 2 disjoint compact subsets of X. Prove that there exist disjoint open sets U 1 and
BALL-POLYHEDRA. 1. Introduction
 BALL-POLYHEDRA BY KÁROLY BEZDEK, ZSOLT LÁNGI, MÁRTON NASZÓDI AND PETER PAPEZ Abstract. We study two notions. One is that of spindle convexity. A set of circumradius not greater than one is spindle convex
BALL-POLYHEDRA BY KÁROLY BEZDEK, ZSOLT LÁNGI, MÁRTON NASZÓDI AND PETER PAPEZ Abstract. We study two notions. One is that of spindle convexity. A set of circumradius not greater than one is spindle convex
Math 118B Solutions. Charles Martin. March 6, d i (x i, y i ) + d i (y i, z i ) = d(x, y) + d(y, z). i=1
 + d i (y i, z i ) = d(x, y) + d(y, z). i=1") Math 8B Solutions Charles Martin March 6, Homework Problems. Let (X i, d i ), i n, be finitely many metric spaces. Construct a metric on the product space X = X X n. Proof. Denote points in X as x = (x,
Math 8B Solutions Charles Martin March 6, Homework Problems. Let (X i, d i ), i n, be finitely many metric spaces. Construct a metric on the product space X = X X n. Proof. Denote points in X as x = (x,
Chapter 3: Baire category and open mapping theorems
 MA3421 2016 17 Chapter 3: Baire category and open mapping theorems A number of the major results rely on completeness via the Baire category theorem. 3.1 The Baire category theorem 3.1.1 Definition. A
MA3421 2016 17 Chapter 3: Baire category and open mapping theorems A number of the major results rely on completeness via the Baire category theorem. 3.1 The Baire category theorem 3.1.1 Definition. A
Locally convex spaces, the hyperplane separation theorem, and the Krein-Milman theorem
 56 Chapter 7 Locally convex spaces, the hyperplane separation theorem, and the Krein-Milman theorem Recall that C(X) is not a normed linear space when X is not compact. On the other hand we could use semi
56 Chapter 7 Locally convex spaces, the hyperplane separation theorem, and the Krein-Milman theorem Recall that C(X) is not a normed linear space when X is not compact. On the other hand we could use semi
Functional Analysis Exercise Class
 Functional Analysis Exercise Class Week 2 November 6 November Deadline to hand in the homeworks: your exercise class on week 9 November 13 November Exercises (1) Let X be the following space of piecewise
Functional Analysis Exercise Class Week 2 November 6 November Deadline to hand in the homeworks: your exercise class on week 9 November 13 November Exercises (1) Let X be the following space of piecewise
Indeed, if we want m to be compatible with taking limits, it should be countably additive, meaning that ( )
") Lebesgue Measure The idea of the Lebesgue integral is to first define a measure on subsets of R. That is, we wish to assign a number m(s to each subset S of R, representing the total length that S takes
Lebesgue Measure The idea of the Lebesgue integral is to first define a measure on subsets of R. That is, we wish to assign a number m(s to each subset S of R, representing the total length that S takes
Optimization and Optimal Control in Banach Spaces
 Optimization and Optimal Control in Banach Spaces Bernhard Schmitzer October 19, 2017 1 Convex non-smooth optimization with proximal operators Remark 1.1 (Motivation). Convex optimization: easier to solve,
Optimization and Optimal Control in Banach Spaces Bernhard Schmitzer October 19, 2017 1 Convex non-smooth optimization with proximal operators Remark 1.1 (Motivation). Convex optimization: easier to solve,
A FIXED POINT THEOREM FOR GENERALIZED NONEXPANSIVE MULTIVALUED MAPPINGS
 Fixed Point Theory, (0), No., 4-46 http://www.math.ubbcluj.ro/ nodeacj/sfptcj.html A FIXED POINT THEOREM FOR GENERALIZED NONEXPANSIVE MULTIVALUED MAPPINGS A. ABKAR AND M. ESLAMIAN Department of Mathematics,
Fixed Point Theory, (0), No., 4-46 http://www.math.ubbcluj.ro/ nodeacj/sfptcj.html A FIXED POINT THEOREM FOR GENERALIZED NONEXPANSIVE MULTIVALUED MAPPINGS A. ABKAR AND M. ESLAMIAN Department of Mathematics,
converges as well if x < 1. 1 x n x n 1 1 = 2 a nx n
 Solve the following 6 problems. 1. Prove that if series n=1 a nx n converges for all x such that x < 1, then the series n=1 a n xn 1 x converges as well if x < 1. n For x < 1, x n 0 as n, so there exists
Solve the following 6 problems. 1. Prove that if series n=1 a nx n converges for all x such that x < 1, then the series n=1 a n xn 1 x converges as well if x < 1. n For x < 1, x n 0 as n, so there exists
2 Metric Spaces Definitions Exotic Examples... 3
 Contents 1 Vector Spaces and Norms 1 2 Metric Spaces 2 2.1 Definitions.......................................... 2 2.2 Exotic Examples...................................... 3 3 Topologies 4 3.1 Open Sets..........................................
Contents 1 Vector Spaces and Norms 1 2 Metric Spaces 2 2.1 Definitions.......................................... 2 2.2 Exotic Examples...................................... 3 3 Topologies 4 3.1 Open Sets..........................................
Euclidean Models of the p-adic Integers
 Euclidean Models of the p-adic Integers Scott Zinzer December 12, 2012 1 Introduction Much of our visual perception is based in what seems to be standard Euclidean space; we can easily imagine perfectly
Euclidean Models of the p-adic Integers Scott Zinzer December 12, 2012 1 Introduction Much of our visual perception is based in what seems to be standard Euclidean space; we can easily imagine perfectly
Math Tune-Up Louisiana State University August, Lectures on Partial Differential Equations and Hilbert Space
 Math Tune-Up Louisiana State University August, 2008 Lectures on Partial Differential Equations and Hilbert Space 1. A linear partial differential equation of physics We begin by considering the simplest
Math Tune-Up Louisiana State University August, 2008 Lectures on Partial Differential Equations and Hilbert Space 1. A linear partial differential equation of physics We begin by considering the simplest
Measure Theory on Topological Spaces. Course: Prof. Tony Dorlas 2010 Typset: Cathal Ormond
 Measure Theory on Topological Spaces Course: Prof. Tony Dorlas 2010 Typset: Cathal Ormond May 22, 2011 Contents 1 Introduction 2 1.1 The Riemann Integral........................................ 2 1.2 Measurable..............................................
Measure Theory on Topological Spaces Course: Prof. Tony Dorlas 2010 Typset: Cathal Ormond May 22, 2011 Contents 1 Introduction 2 1.1 The Riemann Integral........................................ 2 1.2 Measurable..............................................
MATH 31BH Homework 1 Solutions
 MATH 3BH Homework Solutions January 0, 04 Problem.5. (a) (x, y)-plane in R 3 is closed and not open. To see that this plane is not open, notice that any ball around the origin (0, 0, 0) will contain points
MATH 3BH Homework Solutions January 0, 04 Problem.5. (a) (x, y)-plane in R 3 is closed and not open. To see that this plane is not open, notice that any ball around the origin (0, 0, 0) will contain points