Sensorless IPMSM Control Based on an Extended Nonlinear Observer with Rotational Inertia Adjustment and Equivalent Flux Error Compensation
|
|
|
- Gilbert Carroll
- 6 years ago
- Views:
Transcription
1 Journal of Power Electronics, to be published 1 Sensorless IPMSM Control Based on an Extended Nonlinear Observer with Rotational Inertia Adjustment and Equivalent Flux Error Compensation Yongle Mao **, Jiaqiang Yang, Dejun Yin *, and Yangsheng Chen ** ** College of Electrical Engineering, Zhejiang University, Hangzhou, China * School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing, China Abstract Mechanical and electrical parameter uncertainties cause dynamic and static estimation errors of the rotor speed and position, resulting in performance deterioration of sensorless control systems. This paper applies an extended nonlinear observer to interior permanent magnet synchronous motors (IPMSM) for the simultaneous estimation of the rotor speed and position. Two compensation methods are proposed to improve the observer performance against parameter uncertainties: an on-line rotational inertia adjustment approach that employs the gradient descent algorithm to suppress dynamic estimation errors, and an equivalent flux error compensation approach to eliminate static estimation errors caused by inaccurate electrical parameters. The effectiveness of the proposed control strategy is demonstrated by experimental tests. Key words: Interior permanent magnet synchronous motors, Nonlinear observer, Parameter uncertainty, Sensorless control I. INTRODUCTION Due to its high torque density, high efficiency, and wide constant-power operating range, the interior permanent magnet synchronous motor (IPMSM) has been extensively used in industrial areas and vehicle propulsions [1] [2]. However, the high-performance field-oriented control (FOC) systems of IPMSMs require the rotor position information that is generally measured by a mechanical position sensor, e.g. a resolver or an encoder, which is vulnerable to strong vibrations, high operating temperatures, and high humidity. Therefore, various sensorless control schemes have been proposed to eliminate the need for the mechanical position sensors to enhance the system robustness and reduce the manufacturing and maintenance costs [3] [4]. In the medium to high speed range, model-based sensorless methods are often used due to their high-efficiency and simplicity, which include back-emf estimation-based and observer-based methods. The former is a two-stage sensorless approach, in which, the back-emf is estimated first, and then the rotor speed and position can be extracted with an arc-tangent or phase-locked-loop (PLL) based on the relationship between the mechanical variables and the back-emf. In [5] [6], the back-emf is directly calculated from voltage equations. Thus, this method is very simple but sensitive to parameter variations and system noise. In [7] [8], a linear state observer is constructed in the estimated synchronous reference frame to estimate the back-emf by assuming it to be constant in a sampling period. In [9] [12], sliding-mode observer (SMO) is employed to estimate the back-emf in the stator-fixed reference frame. The conventional two-order SMO is very attractive due to its simple algorithm and robustness against rotor flux-linkage uncertainty. However, it suffers from chattering and phase delay problems. In addition, modifications are required to mitigate the chattering of the SMO, such as replacing the signum function with the sigmoid/saturation function or constructing a high-order SMO by taking the current and back-emf as state variables [11] [12]. For observer-based sensorless methods, the voltage equation is considered as a reference model, and an adjustable model is formulated by incorporating the estimated unknown mechanical variables. Current estimation errors
2 2 Journal of Power Electronics, to be published between the reference and adjustable models are utilized directly to regulate the estimated position/speed. In [13] [14], a full-order extended Kalman filter (EKF), which is an optimal estimator in the least-square sense, is implemented for speed and position estimation with high reliability. However, the EKF requires complex matrices computations and proper initialization for the covariance matrix. Compared with the EKF, the Model Reference Adaptive System (MRAS) is much simpler. It is employed in [15] [16] for sensorless control, along with motor parameters simultaneously identified based on an EKF or additional MRAS estimators. Since the rotor position is estimated from the integration of the estimated speed without any adjustment scheme, errors might propagate in sequentially connected estimation loops. In [17], considering parameter uncertainties, three interconnected adaptive observers are designed to simultaneously estimate the rotor position, speed and load-torque, and the stator resistance and inductance, respectively. The observability of the interconnected observers relies on the input persistence property of each subsystem, and observer gains should be judiciously selected for correct convergence. An alternative strategy for the simultaneous estimation of the rotor speed and position is utilizing a nonlinear observer incorporating the motor mechanical model [18]. The state-linearization method is applied in determining the structure of the observer gain matrix for asymptotic convergence. To improve the observer performance against load variations, an extended nonlinear observer is proposed in [19] to estimate the stator current, rotor position and speed, as well as the disturbance torque. Although the nonlinear observer has been extended to IPMSMs in [20] by directly calculating the position dependent inductance induced by the rotor saliency, the implementation process is rather complicated. Moreover, estimation errors of the speed and position will arise if inaccurate mechanical or electrical parameters are adopted in the nonlinear observer. In this paper, an extended nonlinear observer is applied to IPMSMs based on the active flux concept. Considering that the extended nonlinear observer is sensitive to parameter uncertainties, a rotational inertia adjustment strategy employing the gradient descent algorithm is proposed. Instead of precisely identifying each of the electrical parameters, an equivalent flux error representing the effects of inaccurate parameters is also compensated, which is very simple and advantageous for industrial applications. The rest of this paper is organized as follows. In Section II, an extended nonlinear observer is designed for IPMSMs. In Section III, explicit estimation errors of the speed and position are derived. In addition, an inertia adjustment strategy is proposed to suppress dynamic estimation errors, and an equivalent flux error is defined and compensated to eliminate static estimation errors. Experimental setup and evaluation of the proposed strategy are given in Section IV. Finally, some conclusions are given in Section V. II. SENSORLESS IPMSM CONTROL BASED ON AN EXTENDED NONLINEAR OBSERVER A. Extended Nonlinear Observer for IPMSMs The conventional IPMSM model is not suitable for the application of model-based sensorless methods. Based on the active flux concept proposed in [21], the voltage equation of IPMSMs in the dq - frame takes the form of: where, vd id i d mlqq i ( Ld Lq) i d Rs Lq v q i q i q mlqi d m v d, (1) v q are stator voltages in the dq - frame; i d, i q are stator currents in the dq - frame; L d, d-axis and q-axis inductances; R s and L q are the f are the stator resistance and permanent magnet (PM) flux-linkage; P n is the pole pairs, m is the rotor mechanical speed; and f ( Ld Lq) id is the active flux. ( Ld Lq) i d represents the transformer voltage induced by the non-constant active flux. By assuming that the transformer voltage is constant between two consecutive sampling periods, it can be calculated and combined with the voltage input v d, and the resultant voltage equation in the - frame can be expressed as: u i i sine Rs Lq m u i (2) i cose where, u v ( Ld Lq) i d cose, u v ( Ld Lq) i d sine ; v, v are stator voltages in the - frame; i, i are stator currents in the - frame; and e is the rotor electrical position. Incorporating voltage equation (2) and the mechanical equation, a full-order dynamic model of IPMSM can be established as: Rs m sine u i Lq Lq L i q i Rs m cos u i e (3) m Lq Lq Lq e ( Te TL) J m where, T e, Te 1.5 iq T L are electromagnetic torque and load torque, ; and J is the system rotational inertia. Note that the reconstructed model of IPMSM, based on the active flux, is equivalent to that of a surface-mounted PMSM in the mathematical sense. Based on (3), an extended nonlinear observer can be directly applied to IPMSM with the state variables to be
3 Journal of Power Electronics, to be published 3 stator currents, rotor speed and position, as well as the load torque [19]. Compared with the system sampling frequency, the load torque can be assumed to be constant for a very short time, i.e., dtl dt 0. Estimation errors of the stator currents are used to regulate the estimated state variables. The state linearization method is utilized to design the observer gain matrix K by transforming the extended nonlinear observer to the polar coordinate frame and ultimately back to the - frame. More details on the observer gain matrix derivation can be found in [18] [19] and the references therein. R s m sine u i i Lq Lq Lq i Rs mcos u i e i m Lq Lq L q K (4) i e ( Te TL) J T m L 0 where, variables with ^ denote the estimated values, parameters with ^ denote the nominal values; Te 1.5 iq, and: u ( ) cos v Ld Lq i d e K I 1 0, K u v ( L ) sin d Lq i, I ; d e Γ 0 1 Kz msin e Kz mcos e L q Γ K zcose Kzsine, K, Kz, KL. m K LJ msine KLJ mcos e B. Observer Gain Selection To investigate the dynamic performance of the extended nonlinear observer, the error dynamics of the current estimator around the equilibrium point can be derived by subtracting (4) from (3) under the assumption that accurate motor parameters are adopted. Rs ( msine msin e) ( K ) i i Lq Lq i R (5) s ( mcose mcos e) ( K ) i Lq L q Then, the transfer function from the back-emf estimation error to the current estimation error can be obtained by: 1 ( msin e msin e) i s K Lq (6) 1 P n ( mcose mcos e) i s K Lq where, K K Rs Lq. The linearized transfer functions of the mechanical model regulator around the equilibrium point take the form of: T i Kz m Kz me KLJ Γ m i sk m( sk ) sk Fig. 1. Block diagram of the linearized speed and position estimators of the extended nonlinear observer. where, m m m, e e e. Based on (4) and (7), the speed and position estimators can be represented by two closed-loop tracking control systems, as shown in Fig. 1. The structure of the extended nonlinear observer belongs to the parallel type, with the speed and position simultaneously regulated by current estimation errors. According to Fig. 1, the estimated rotor speed and position in the s-domain can be expressed as: ( Ks z KL) ss ( K ) m Te J m (8) s K s Ks z KL s K s Ks z KL ( ) m m e n ( ) Kz s K P m e (9) 2 2 s K s( m m) Kz s K s( m m) Kz It can be seen from (8) and (9) that the poles and zeroes of the closed-loop transfer functions are nearly constant under different speed conditions (assuming that m m ). The observer gains can be selected to fulfill the expected tracking bandwidth and damping coefficient using the Root Locus or Bode Diagrams, under the constraint of: K ( KL Kz) KL K Kz (10) For completeness, the observer gains selected in this application are given below: K 4 10, Kz 1 10, KL 2 10 (7) (11) C. Sensorless Control System for IPMSMs Fig. 2 shows the block diagram of the sensorless IPMSM control system based on the extended nonlinear observer, which consists of a speed PI (proportional-integral) regulator and two current PI regulators. The rotor speed and position are obtained through the extended nonlinear observer except for the startup period, where an open-loop sensorless starting method is employed instead. The q-axis current reference is generated from the speed tracking error, and the d-axis current reference i d * is determined by i q *, while employing * i q


4 4 Journal of Power Electronics, to be published the maximum torque per ampere (MTPA) control in the * constant-torque mode. While in the constant-power mode, i d is determined by the q-axis current control error i q using Fig. 2. Block diagram of the sensorless IPMSM control system. the feed-back flux-weakening control. III. ESTIMATION ERROR AND COMPENSATION STRATEGY A. Estimation Error Analysis The q-axis stator inductance varies with the magnetic saturation level, while the stator resistance and the PM flux-linkage depend on the stator and rotor temperatures, respectively. It should be noted that the effect of the inductances on causing position and speed estimation errors is less important than those of the stator resistance and the PM flux-linkage. The q-axis inductance can be measured offline with different q-axis currents [22], and on-line adjusted against the q-axis current by using a look-up-table (LUT). Therefore, the stator inductances can be assumed to be accurate. Errors between the actual and nominal values of the parameters are defined as: R s R s Rs, f f, J J J (12) Considering parameter inaccuracies, the error dynamics of the sensorless control system can be derived by subtracting the extended nonlinear observer (4) from the dynamic model of the IPMSM (3), as: Li q Ri s Ri s ( u u ) 1 1 Li q Ri s Ri s ( u u) 2 2 Li q J 0 m J m ( Te TL) ( Te TL) K (13) Li q P 0 e n m 0 0 T L where: 1 ( m f m)sin e m cosesin e ; 2 ( m f m)cose m sinesin e 1 m sin e(cos e 1). 2 m cos e(cos e 1) To evaluate the effects of inaccurate parameters, the following approximations are made when the extended nonlinear observer converges to the equilibrium point. a) The rotor position estimation error is small, which yields sin e e, cos e 1. b) The derivative of the estimated position is equal to the actual rotor speed, which indicates d e dt = m. c) The bandwidth of the current controller is fairly high, and when compared with slowly varying mechanical variables, the stator currents in the dq - frame can be assumed to be constant, i.e., i d 0, i q 0. Based on the assumptions above, the estimation errors of the speed and position can be calculated from the error dynamics. ( R s K Lq) R siq m m T dis (14) KJL z q Ri ( K s s) d Lq R m e m KzLq m (15) where the disturbance torque T dis is defined as: Tdis= J m 1.5 iq TL T L. It can be inferred from (14) that the speed estimation error m can be separated into two types: the dynamic estimation error caused by the acceleration difference related to the disturbance torque T dis and the static estimation error caused by the voltage errors related to inaccurate electrical parameters. As shown in (15), the position estimation error e consists of two components: the first is caused by inaccurate electrical parameters, while the second is caused by the speed estimation errors, both dynamic and static. Fig. 3 shows a comparison of the estimation errors obtained from the simulation results and the theoretical calculations based on the error equations of (14) and (15). In Fig. 3(a), the electrical parameters used in the observer are accurate, while Ĵ is deliberately set to 0.33 J under different acceleration conditions. In Fig. 3(b), the PM flux-linkage is accurate while the stator resistance is deliberately set to 0.5 R s, 0.75 R s, R s, 1.25 R s, 1.5 R s respectively under full-load conditions. In Fig. 3(c), the stator resistance is accurate while the PM flux-linkage is deliberately set to 0.9 f, 0.95 f, f, 1.05 f, 1.1 f respectively under light-load conditions. Large dynamic and static estimation errors of the speed and position related to inaccurate parameters can be observed from the simulation results shown in Fig. 3. This is in accordance with the theoretical calculation, and the validity of the derived error equations can be confirmed. m

5 Journal of Power Electronics, to be published 5 B. On-line Rotational Inertial Adjustment As discussed in the previous section, dynamic estimation errors of the speed and position will arise during the acceleration and deceleration periods if the system (c) Fig. 3. Comparison of estimation errors obtained from simulation results and theoretical calculation considering the parameter inaccuracies: (a) the rotational inertia is inaccurate; (b) the stator resistance is inaccurate; (c) the PM flux-linkage is inaccurate. (a) (b) rotational inertia and torque constant are inaccurate. To suppress the dynamic estimation errors, the rotational inertia must be on-line adjusted. The speed estimation error dynamics can be extracted from (13), and rewritten as: J m J m ( Te TL) ( Te T L) JK zd (16) where the symbolic speed error d is defined as: L q d ( i sin e i cos e) (17) d reflects the speed dynamic estimation error caused by the acceleration difference between m and m. To adjust the rotational inertia by employing the gradient descent algorithm, the following objective function is defined. 1 2 F ( J Kzd) (18) 2 As clearly shown, the objective function reaches its minimum only when is zero. The gradient of F with d respect to J takes the form of: F F J JKz d J ( J Kzd ) J (19) According to (16), the partial derivative of ĴKz d with respect to J is calculated as: ( JK zd) m J Substituting (20) into (19) yields: FJ ĴKz d m (20) (21) According to the gradient descent algorithm, the rotational inertia should be adjusted towards the negative gradient of the objective function F, which leads to:

6 6 Journal of Power Electronics, to be published J J FJ KJdt (22) J K JKzJdLPF ( m) dt where J is the rotational inertia after adjustment, and K J is the gain for the system rotational inertia adjustment. In this application, K J is set to 0.2. By considering the positive definite F as a Lyapunov function candidate, its derivative can be derived as: FdJ F J dt (23) d 2 FJ ( FJKJdt) KJ( FJ) 0 dt This implies that the gradient descent based inertia estimator is stable. Given that m is unknown in practical sensorless control systems, m is used instead to adjust the rotational inertia, and a LPF (low pass filter) is supplemented to eliminate the noise in m, with the cut-off frequency set to 100 Hz. Fig. 4 shows the schematic diagram of the speed estimator with online rotational inertia adjustment. Fig. 4. Schematic diagram of the rotor speed estimator. As depicted in Fig. 4, the inputs of the speed estimator are d, T e, T L, and J, with m as its output. Although the inaccuracy of the PM flux-linkage causes the wrong convergence of T L and J, the dynamic estimation error of the speed corresponding to the first component of (14) is still effectively suppressed because J is adjusted to minimize the objective function F. C. Equivalent Flux Error Compensation With the dynamic estimation errors of the speed and position already suppressed by on-line adjusting of the rotational inertia, the static estimation errors caused by inaccurate electrical parameters, still need to be eliminated. In this study, the equivalent flux error is defined to represent the effects of R s and. Ri s q m equ (24) m By substituting the expression of equ into (14), the static speed estimation error can be rewritten as: equ equ m m (25) Considering that R sd i, in the first component of (15), is in inverse proportion to the back-emf, its effect is very small in the medium to high speed range and can be safely neglected. Thus, e mainly comes from the speed estimation error. Applying (25) into (15) and neglecting the first component of the position estimation error yields: ( K Lq Rs) m equ e (26) KL z q As indicated in (25) and (26), the static estimation errors of the speed and position are both proportional to the equivalent flux error. They can be eliminated by compensating equ in the extended nonlinear observer. The position estimation error dynamics can be extracted from (13) and rewritten as: KL z q e m i cos e i sine m (27) By substituting (25) into (27), the relationship between the equivalent flux error and the current estimation error under steady-state conditions can be derived as: KL z q equ 2 2 i cos e i sine (28) m As clearly shown in (28), by considering the rotor speed to be constant for a very short time, the equivalent flux error is proportional to the current estimation error of the d-axis, and can be compensated by forcing ( i cos e i sin e) to be zero. Thus, an adaptive observer for the equivalent flux error estimation can be designed as: where λ z equ K K L q 2 2 i cos e i sine dt m Kλ (29) is the gain for the equivalent flux error estimation. Recalling the definition of the equivalent flux error, the stator resistance error and the PM flux error are the dominant components in the low and high speed regions, respectively. Although a large K λ is beneficial in suppressing the transient estimation errors caused by step-changes of i q, a small K λ is preferred in maintaining stable and low-noise estimations. In this application, K λ is set to 1. To suppress the estimation errors of the speed and position caused by inaccurate electrical parameters, the estimated equivalent flux error is compensated in the proposed extended nonlinear observer. The resultant extended nonlinear observer with rotational inertia adjustment and equivalent flux error compensation is expressed as:
 The performance of the proposed sensorless control system is investigated on a testing platform based on a fixed-point DSP TMS320F28234, as shown in Fig. 5 and Fig. 6.")

 17.0 (mh) Pole Pairs 4 Rated Speed 2000 (rpm) System Rotational Inertia 3.0 (g m 2 ) this is only done for reference purposes.")
7 Journal of Power Electronics, to be published 7 R P s n m( equ)sin e u i i Lq Lq Lq i R P s n m( equ)cos e u i iα m Lq Lq L K q i β e ( Te TL) J T P L n m 0 IV. EXPERIMENTS AND ANALYSIS (30) The performance of the proposed sensorless control system is investigated on a testing platform based on a fixed-point DSP TMS320F28234, as shown in Fig. 5 and Fig. 6. The sampling frequency and the PWM frequency are both set to 10 khz. The DC bus voltage is measured, and the reference voltage u * is fed to the extended nonlinear observer instead of the actual input voltage of the IPMSM. In addition, the dead time and the digital PWM delay are also compensated. A 2500-line incremental encoder is installed to measure the actual rotor position of the IPMSM. However, q-axis Inductance (i q =0) 17.0 (mh) Pole Pairs 4 Rated Speed 2000 (rpm) System Rotational Inertia 3.0 (g m 2 ) this is only done for reference purposes. The load torque imposed on the IPMSM is generated by a permanent magnet synchronous generator (PMSG) with a power resistor as its load. The IPMSM used in the experimental investigation has a skewed stator and an asymmetric air gap to optimize the sinusoidally distributed air-gap flux. Thus, the flux harmonics are negligible and the ideal motor model can be used. The specifications of the IPMSM are given in Table I. Fig. 7 shows the measured q-axis inductance of the prototype IPMSM under different q-axis currents. Fig. 8 shows the speed step response of the sensorless IPMSM control system based on an extended nonlinear observer. The rotor speed steps from 100 rpm to 100 rpm and then back within 50 ms under light-load conditions. The experimental results demonstrate the stable operation of the sensorless control system through zero speed. The estimated speed tracks the actual speed smoothly except for the zero speed points. N S N S U dc i ab Fig. 5. Testing platform setup. Fig. 7. Measured q-axis inductance of the prototype IPMSM. Fig. 6. Photograph of the testing platform. TABLE I SPECIFICATIONS OF IPMSM IN EXPERIMENTAL TESTING Parameter Rated Power Rated Torque Rated Current (peak) PM flux-linkage Stator Resistance d-axis Inductance (i d =0) Value 1.0 (kw) 4.8 (N m) 4.0 (A) 0.2 (Wb) 1.5 (Ω) 13.0 (mh)










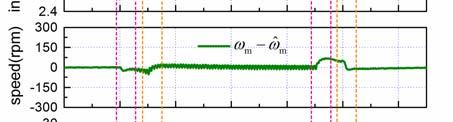
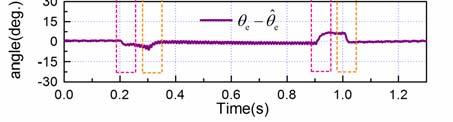
8 8 Journal of Power Electronics, to be published Fig. 8. Experimental results of speed step response under light-load condition in the low speed region. The maximum position estimation error during the transient periods is less than 30, whereas the average position estimation error under the steady-state condition converges to zero despite the ripples. Fig. 9 shows the dynamic performance of the sensorless control system against step load disturbances under low speed operation. The speed reference is fixed to 50 rpm (2.5% rated speed), and a 4 N m (80% rated load) step load is applied and removed at 1.3 s and 4.8 s, respectively. Stable and good dynamic performance can be observed in the experimental results. Note that the load torque imposed on the IPMSM is proportional to the actual speed, and the estimated load torque tracks its actual value well. The speed and position estimation errors are well damped and rapidly converge to zero, with the transient position estimation error below 20. Fig. 10 shows sensorless control results with and without the rotational inertia adjustment in the extended nonlinear observer. The IPMSM steps from 500 rpm to 1000 rpm and back under light-load conditions. The electrical parameters used in the observer are accurate, while Ĵ is Fig. 10. Experimental results with and without rotational inertia adjustment when inaccurate system rotational inertia is adopted. deliberately set to 0.33 J. As shown in Fig. 10, large dynamic estimation errors of the speed and position can be observed during the acceleration and deceleration periods. After the rotational inertia adjustment strategy is activated, the estimated rotational inertia J gradually converges to its actual value, and the dynamic estimation errors are effectively suppressed. Additionally, the experimental results also indicate that a large K J results in a fast convergence rate of J. However, it may cause remarkable estimation overshoots as depicted in the estimation errors of the speed and position. Fig. 11 shows the sensorless control results both with and without the equivalent flux error compensation against electrical parameter uncertainties accounting for the Fig. 9. Experimental results of dynamic performance against step load disturbance at 50 rpm. (a)
 the stator resistance is inaccurate; (b) the PM flux-linkage is inaccurate.")
, the stator resistance is accurate and the PM flux-linkage is deliberately set to 1.1 f with a light-load.")
9 Journal of Power Electronics, to be published 9 Fig. 11. Experimental results with and without the equivalent flux error compensation: (a) the stator resistance is inaccurate; (b) the PM flux-linkage is inaccurate. (b) temperature-rise and magnetic saturation effects. To simulate practical conditions, in Fig. 11(a), the PM flux-linkage is accurate and the stator resistance is deliberately set to 0.5 R s with a full-load. Meanwhile, in Fig. 11(b), the stator resistance is accurate and the PM flux-linkage is deliberately set to 1.1 f with a light-load. Large static estimation errors of the speed and position can be observed from these results, as shown on the left side of the dashed line in Fig. 11(a) and (b). After the equivalent flux error is compensated in the observer, the estimated speed and position gradually converge to their actual values in both cases, and the average static estimation errors tend to be zero. Although a large K λ is beneficial for fast convergence, the ripple content of the

 (d) Fig. 12.")










10 10 Journal of Power Electronics, to be published (a) (b) (c) (d) Fig. 12. Speed tracking performance with and without rotational inertia adjustment and equivalent flux error compensation, when inaccurate system rotational inertia, stator resistance, and PM flux-linkage are adopted in the observer: (a) without rotational inertia adjustment and equivalent flux error compensation; (b) only with rotational inertia adjustment; (c) only with equivalent flux error compensation; (d) with rotational inertia adjustment and equivalent flux error compensation.
, only the equivalent flux error is compensated in the extended nonlinear observer, and the static estimation errors are effectively suppressed.")
 without the equivalent flux error compensation; (b) with the equivalent flux error")


11 Journal of Power Electronics, to be published 11 shown in parts 1 4. However, the static estimation errors still need to be eliminated. In Fig. 12(c), only the equivalent flux error is compensated in the extended nonlinear observer, and the static estimation errors are effectively suppressed. However, dynamic estimation errors still exist during the acceleration and deceleration periods. Moreover, as depicted in parts 2 and 4, the performance of the equivalent flux (a) (b) Fig. 13. Steady-state performance under full-load condition with the q-axis inductance 20% larger than its actual value: (a) without the equivalent flux error compensation; (b) with the equivalent flux error compensation. estimated equivalent flux error is relatively high, especially in the low speed region. In addition, significant oscillations can be found in the estimated speed and position. Fig. 12 shows the speed tracking performance both with and without the rotational inertia adjustment and equivalent flux error compensation when inaccurate values for the system rotational inertia, stator resistance, and PM flux-linkage are adopted in the observer. The IPMSM is controlled to accelerate from 500 rpm to 1500 rpm and back within 0.1 s. The load torque imposed on the IPMSM is approximately proportional to the actual speed. Ĵ is deliberately set to 0.33 J, while R s and f are deliberately set to 0.5 R s and 0.9 f to simulate the worst case. In Fig. 12(a), large dynamic and static estimation errors of the speed and position can be observed in both the transient and steady-state periods owing to inaccurate values of system rotational inertia and electrical parameters. In Fig. 12(b), only the rotational inertia adjustment strategy is activated, and the dynamic estimation errors are effectively suppressed, as error compensation strategy deteriorates because of the speed estimation error during transient periods. In Fig. 12(d), the rotational inertia adjustment and the equivalent flux error compensation strategy are implemented in the extended nonlinear observer, and both the dynamic and static estimation errors are effectively suppressed. Fig. 13 shows the steady-state performance of the sensorless control system under the full-load condition when the q-axis inductance is deliberately set 20% larger than its actual value. Accurate values for the system rotational inertia, stator resistance, and PM flux-linkage are adopted in the extended nonlinear observer. In Fig. 13(a), the equivalent flux error compensation strategy is disabled and considerable estimation errors of the speed and position can be observed. They are caused by the q-axis inductance error. In Fig. 13(b), the equivalent flux error compensation strategy is activated and the speed estimation error is effectively suppressed. However, a small position estimation error still exists. The experimental results indicate that exact inductance parameters are required for accurate position estimation and high efficiency sensorless control. V. CONCLUSIONS This paper proposed a sensorless control scheme for IPMSMs based on a full-order extended nonlinear observer with rotational inertia adjustment and equivalent flux error compensation. By taking parameter inaccuracies into account, explicit estimation errors of the speed and position have been derived, which can be separated into dynamic and static estimation errors. Furthermore, rotational inertia adjustment and equivalent flux error compensation approaches are proposed to improve the observer performance against parameter uncertainties, and the dynamic and static estimation errors of the speed and position have been effectively suppressed. Both experimental and analytical studies demonstrated that the proposed sensorless control strategy for IPMSM, not only has high performance on the estimation of the speed and position in both transient and steady-state periods, but also shows high robustness to parameter uncertainties over wide speed range. ACKNOWLEDGMENT This work was supported by the National Basic Research
. REFERENCES [1] G. Pellegrino, P. Guglielmi, and A.")

12 12 Journal of Power Electronics, to be published Program (973 Program) (2013CB035604), the Technology Application Research Program for Public Welfare of Zhejiang Province (2015C31125), and the Natural Science Foundation of Zhejiang Province (LY14E070004). REFERENCES [1] G. Pellegrino, P. Guglielmi, and A. Vagati, "Design tradeoffs between constant power speed range, uncontrolled generator operation, and rated current of IPM motor drives," IEEE Trans. Ind. Appl., Vol. 47, No. 5, pp , Sep./Oct [2] D. Yin, S. Oh, and Y. Hori. "A Novel Traction Control for EV Based on Maximum Transmissible Torque Estimation," IEEE Trans. Ind. Electron., Vol. 56, No. 6, pp , Jun [3] S. Kim, J. Ha, and S. Sul, "PWM switching frequency signal injection sensorless method in IPMSM," IEEE Trans. Ind. Appl., Vol. 48 No. 5, pp , Sep./Oct [4] KG. Lee, JS. Lee, and KB. Lee, "Wide-range sensorless control for SPMSM using an improved full-order flux observer," Journal of Power Electronics, Vol. 15, No. 3, pp , May [5] Y. Inoue, Y. Kawaguchi, S. Morimoto, and M. Sanada, "Performance improvement of sensorless IPMSM drives in a low-speed region using online parameter identification," IEEE Trans. Ind. Appl., Vol. 47, No. 2, pp , Mar./Apr [6] D. Paulus, J. Stumper, and R. Kennel, "Sensorless control of synchronous machines based on direct speed and position estimation in polar stator-current coordinates," IEEE Trans. Power Electron., Vol. 28 No. 5, pp , May [7] P. Kshirsagar, R. Burgos, J. Jang, A. Lidozzi, F. Wang, D. Boroyevich, and S. Sul, "Implementation and sensorless vector-control design and tuning strategy for SMPM machines in fan-type applications,". IEEE Trans. Ind. Appl., Vol. 48, No. 6, pp , Nov./Dec [8] B. Nahid-Mobarakeh, F. Meibody-Tabar, and F. Sargos, "Back EMF estimation-based sensorless control of PMSM: robustness with respect to measurement errors and inverter irregularities," IEEE Trans. Ind. Appl., Vol. 43, No. 2 pp , Mar./Apr [9] J. Dominguez, A. Navarrete, M. Meza, A. Loukianov, and J. Canedo, "Digital sliding-mode sensorless control for surface-mounted PMSM," IEEE Trans. Ind. Informat., Vol. 10, No. 1, pp , Feb [10] T. Bernardes, V. Montagner, H. Grundling, and H. Pinheiro, "Discrete-time sliding mode observer for sensorless vector control of permanent magnet synchronous machine," IEEE Trans. Ind. Electron., Vol. 61, No. 4, pp , Apr [11] G. Zhang, G. Wang, D. Xu, and N. Zhao, "ADALINE-network-based PLL for position sensorless interior permanent magnet synchronous motor drives." IEEE Trans. Ind. Electron., Vol. 31, No. 2, pp , Feb [12] Y. Fan, L. Zhang, M. Cheng, and K. Chau, "Sensorless SVPWM-FADTC of a new flux-modulated permanent-magnet wheel motor based on a wide-speed sliding mode observer," IEEE Trans. Ind. Electron., Vol. 62, No. 5, pp , May [13] L. Idkhajine, E. Monmasson, and A. Maalouf, "Fully FPGA-based sensorless control for synchronous AC drive using an extended Kalman filter," IEEE Trans. Ind. Electron., Vol. 59, No. 10, pp , Oct [14] S. Bolognani, L. Tubiana, and M. Zigliotto, "EKF-based sensorless IPM synchronous motor drive for flux-weakening applications," IEEE Trans. Ind. Appl., Vol. 39, No. 3 pp , May/Jun [15] Y. Shi, K. Sun, L. Huang, and Y. Li, "Online identification of permanent magnet flux based on extended Kalman filter for IPMSM drive with position sensorless control," IEEE Trans. Ind. Electron., Vol. 59, No.11, pp , Nov [16] M. Rashed, P. F. A. MacConnell, A. F. Stronach, and P. Acarnley, "Sensorless indirect-rotor-field-orientation speed control of a permanent-magnet synchronous motor with stator-resistance estimation," IEEE Trans. Ind. Electron., Vol. 54, No. 3, pp , Jun [17] M. Hamida, J. Leon, A. Glumineau, and R. Boisliveau, "An adaptive interconnected observer for sensorless control of PM synchronous motors with online parameter identification." IEEE Trans. Ind. Electron., Vol. 60, No. 2, pp , Feb [18] G. Zhu, A. Kaddouri, L. A. Dessaint, and O. Akhrif, "A nonlinear state observer for the sensorless control of a permanent-magnet AC machine," IEEE Trans. Ind. Electron., Vol. 48, No. 6, pp , Dec [19] J. A. Solsona, M. I. Valla, and C. Muravchik, "Nonlinear control of a permanent magnet synchronous motor with disturbance torque estimation," IEEE Trans. Energy Convers., Vol. 15, No. 2, pp , Jun [20] G. Bisheimer, M. O. Sonnaillon, C. H. De Angelo, J. A. Solsona, and G. O. Garcia, "Full speed range permanent magnet synchronous motor control without mechanical sensors," IET Electr. Power Appl., Vol. 4, No. 1, pp , [21] I. Boldea, M. C. Paicu, and G. D. Andreescu, "Active flux concept for motion-sensorless unified AC drives," IEEE Trans. Power Electron., Vol. 23, No. 5, pp , Sep [22] S. Morimoto, M. Sanada, and Y. Takeda, "Effects and compensation of magnetic saturation in flux-weakening controlled permanent magnet synchronous motor drives," IEEE Trans. Ind. Appl., Vol. 30, No. 6, pp , Nov./Dec Yongle Mao was born in China, in He received his B.S. and M.S. degrees in Electrical Engineering from the Harbin Institute of Technology (HIT), Harbin, China, in 2009 and 2011, respectively. He is presently working towards his Ph.D. degree in the College of Electrical Engineering, Zhejiang University, Hangzhou, China. His current research interests include sensorless control and parameter identification in AC machines. Jiaqiang Yang was born in China, in He received his Ph.D. degree in Electrical Engineering from Zhejiang University, Hangzhou, China, in He has been an Associate Professor in the College of Electrical Engineering, Zhejiang University, Hangzhou, China, since He was a


13 Journal of Power Electronics, to be published 13 research fellow at the National University of Singapore, Singapore, from March 2011 to April His current research interests include power electronics, electric machine drives, and control strategies. Dejun Yin was born in China, in He received his B.S. and M.S. degrees in Electrical Engineering from the Harbin Institute of Technology (HIT), Harbin, China, in 1999 and 2001, respectively. He received another M.S. degree in Electronics Engineering from the Chiba Institute of Technology, Narashino, Japan, in He received his Ph.D. degree in Electrical Engineering from the University of Tokyo, Tokyo, Japan, in He is presently working as a Professor in the Nanjing University of Science and Technology, Nanjing, China. His current research interests include vehicle control and drive/brake systems for next generation electric vehicles. Yangsheng Chen was born in China, in He received his B.S. and M.S. degrees in Electrical Engineering from Zhejiang University, Hangzhou, China, in 1991 and 1994, respectively; and his Ph.D. degree in Department of Electric and Electrical Engineering from the University of Sheffield, Sheffield, England, UK, in He was a Principal Engineer in CT and TRW, where he lead many significant projects, including high power density motors for industrial robots, aero electrical drive systems for flight control, the development of servo motors for the ABS/EPS/ABC systems in automobiles, and research on ECUs and sensors. He has been a Professor in the College of Electrical Engineering, Zhejiang University, Hangzhou, China, since His current research interests include permanent magnet synchronous control, the application of power electronics, motor designs for automobiles and related control systems, motor electromagnetism theory, and research on motor vibrations and noise.
970 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 48, NO. 3, MAY/JUNE 2012
 970 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 48, NO. 3, MAY/JUNE 2012 Control Method Suitable for Direct-Torque-Control-Based Motor Drive System Satisfying Voltage and Current Limitations Yukinori
970 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 48, NO. 3, MAY/JUNE 2012 Control Method Suitable for Direct-Torque-Control-Based Motor Drive System Satisfying Voltage and Current Limitations Yukinori
Sensorless Torque and Speed Control of Traction Permanent Magnet Synchronous Motor for Railway Applications based on Model Reference Adaptive System
 5 th SASTech 211, Khavaran Higher-education Institute, Mashhad, Iran. May 12-14. 1 Sensorless Torue and Speed Control of Traction Permanent Magnet Synchronous Motor for Railway Applications based on Model
5 th SASTech 211, Khavaran Higher-education Institute, Mashhad, Iran. May 12-14. 1 Sensorless Torue and Speed Control of Traction Permanent Magnet Synchronous Motor for Railway Applications based on Model
Robust Speed Controller Design for Permanent Magnet Synchronous Motor Drives Based on Sliding Mode Control
 Available online at www.sciencedirect.com ScienceDirect Energy Procedia 88 (2016 ) 867 873 CUE2015-Applied Energy Symposium and Summit 2015: ow carbon cities and urban energy systems Robust Speed Controller
Available online at www.sciencedirect.com ScienceDirect Energy Procedia 88 (2016 ) 867 873 CUE2015-Applied Energy Symposium and Summit 2015: ow carbon cities and urban energy systems Robust Speed Controller
On-line Parameter Estimation Method for IPMSM Based on Decoupling Control
 World Electric Vehicle Journal Vol. 4 - ISSN 232-6653 - 21 WEVA Page61 EVS25 Shenzhen, China, Nov 5-9, 21 On-line Parameter Estimation Method for IPMSM Based on Decoupling Control Aimeng Wang,Xingwang
World Electric Vehicle Journal Vol. 4 - ISSN 232-6653 - 21 WEVA Page61 EVS25 Shenzhen, China, Nov 5-9, 21 On-line Parameter Estimation Method for IPMSM Based on Decoupling Control Aimeng Wang,Xingwang
Sliding-Mode Observer based Direct Torque Control of an IPM- Synchronous Motor Drive at Very Low Speed
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 6 Ver. IV (Nov Dec. 2014), PP 08-17 www.iosrjournals.org Sliding-Mode Observer based
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 6 Ver. IV (Nov Dec. 2014), PP 08-17 www.iosrjournals.org Sliding-Mode Observer based
An improved deadbeat predictive current control for permanent magnet linear synchronous motor
 Indian Journal of Engineering & Materials Sciences Vol. 22, June 2015, pp. 273-282 An improved deadbeat predictive current control for permanent magnet linear synchronous motor Mingyi Wang, iyi i, Donghua
Indian Journal of Engineering & Materials Sciences Vol. 22, June 2015, pp. 273-282 An improved deadbeat predictive current control for permanent magnet linear synchronous motor Mingyi Wang, iyi i, Donghua
International Journal of Advance Engineering and Research Development SIMULATION OF FIELD ORIENTED CONTROL OF PERMANENT MAGNET SYNCHRONOUS MOTOR
 Scientific Journal of Impact Factor(SJIF): 3.134 e-issn(o): 2348-4470 p-issn(p): 2348-6406 International Journal of Advance Engineering and Research Development Volume 2,Issue 4, April -2015 SIMULATION
Scientific Journal of Impact Factor(SJIF): 3.134 e-issn(o): 2348-4470 p-issn(p): 2348-6406 International Journal of Advance Engineering and Research Development Volume 2,Issue 4, April -2015 SIMULATION
Wide Speed Direct Torque and Flux Controlled IPM Synchronous Motor Drive Using a Combined Adaptive Sliding Mode Observer and HF Signal Injection
 8 Journal of Power Electronics, Vol. 9, No. 4, July 9 JPE 9-4-8 Wide Speed Direct Torque and Flux Controlled IPM Synchronous Motor Drive Using a Combined Adaptive Sliding Mode Observer and HF Signal Injection
8 Journal of Power Electronics, Vol. 9, No. 4, July 9 JPE 9-4-8 Wide Speed Direct Torque and Flux Controlled IPM Synchronous Motor Drive Using a Combined Adaptive Sliding Mode Observer and HF Signal Injection
Simplified EKF Based Sensorless Direct Torque Control of Permanent Magnet Brushless AC Drives
 International Journal of Automation and Computing (24) 35-4 Simplified EKF Based Sensorless Direct Torque Control of Permanent Magnet Brushless AC Drives Yong Liu, Ziqiang Zhu, David Howe Department of
International Journal of Automation and Computing (24) 35-4 Simplified EKF Based Sensorless Direct Torque Control of Permanent Magnet Brushless AC Drives Yong Liu, Ziqiang Zhu, David Howe Department of
Direct Flux Vector Control Of Induction Motor Drives With Maximum Efficiency Per Torque
 Direct Flux Vector Control Of Induction Motor Drives With Maximum Efficiency Per Torque S. Rajesh Babu 1, S. Sridhar 2 1 PG Scholar, Dept. Of Electrical & Electronics Engineering, JNTUACEA, Anantapuramu,
Direct Flux Vector Control Of Induction Motor Drives With Maximum Efficiency Per Torque S. Rajesh Babu 1, S. Sridhar 2 1 PG Scholar, Dept. Of Electrical & Electronics Engineering, JNTUACEA, Anantapuramu,
Evaluation Method to Estimate Position Control Error in Position Sensorless Control Based on Pattern Matching Method
 IEEJ Journal of Industry Applications Vol.7 No.1 pp.73 79 DOI: 10.1541/ieejjia.7.73 Paper Evaluation Method to Estimate Position Control Error in Position Sensorless Control Based on Pattern Matching Method
IEEJ Journal of Industry Applications Vol.7 No.1 pp.73 79 DOI: 10.1541/ieejjia.7.73 Paper Evaluation Method to Estimate Position Control Error in Position Sensorless Control Based on Pattern Matching Method
Parameter Prediction and Modelling Methods for Traction Motor of Hybrid Electric Vehicle
 Page 359 World Electric Vehicle Journal Vol. 3 - ISSN 232-6653 - 29 AVERE Parameter Prediction and Modelling Methods for Traction Motor of Hybrid Electric Vehicle Tao Sun, Soon-O Kwon, Geun-Ho Lee, Jung-Pyo
Page 359 World Electric Vehicle Journal Vol. 3 - ISSN 232-6653 - 29 AVERE Parameter Prediction and Modelling Methods for Traction Motor of Hybrid Electric Vehicle Tao Sun, Soon-O Kwon, Geun-Ho Lee, Jung-Pyo
Sensorless Field Oriented Control of Permanent Magnet Synchronous Motor
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015 INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Sensorless
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015 INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Sensorless
Improved efficiency of a fan drive system without using an encoder or current sensors
 Improved efficiency of a fan drive system without using an encoder or current sensors Tian-Hua Liu, Jyun-Jie Huang Department of Electrical Engineering, National Taiwan University of Science Technology,
Improved efficiency of a fan drive system without using an encoder or current sensors Tian-Hua Liu, Jyun-Jie Huang Department of Electrical Engineering, National Taiwan University of Science Technology,
Impact of the Motor Magnetic Model on Direct Flux Vector Control of Interior PM Motors
 Impact of the Motor Magnetic Model on Direct Flux Vector Control of Interior PM Motors Gianmario Pellegrino, Radu Bojoi, Paolo Guglielmi Politecnico di Torino, Italy (gianmario.pellegrino,radu.bojoi,paolo.guglielmi)@polito.it
Impact of the Motor Magnetic Model on Direct Flux Vector Control of Interior PM Motors Gianmario Pellegrino, Radu Bojoi, Paolo Guglielmi Politecnico di Torino, Italy (gianmario.pellegrino,radu.bojoi,paolo.guglielmi)@polito.it
Inertia Identification and Auto-Tuning. of Induction Motor Using MRAS
 Inertia Identification and Auto-Tuning of Induction Motor Using MRAS Yujie GUO *, Lipei HUANG *, Yang QIU *, Masaharu MURAMATSU ** * Department of Electrical Engineering, Tsinghua University, Beijing,
Inertia Identification and Auto-Tuning of Induction Motor Using MRAS Yujie GUO *, Lipei HUANG *, Yang QIU *, Masaharu MURAMATSU ** * Department of Electrical Engineering, Tsinghua University, Beijing,
Modeling of Direct Torque Control (DTC) of BLDC Motor Drive
 of BLDC Motor Drive") IJSTE - International Journal of Science Technology & Engineering Volume 3 Issue 09 March 2017 ISSN (online): 2349-784X Modeling of Direct Torque Control (DTC) of BLDC Motor Drive Addagatla Nagaraju Lecturer
IJSTE - International Journal of Science Technology & Engineering Volume 3 Issue 09 March 2017 ISSN (online): 2349-784X Modeling of Direct Torque Control (DTC) of BLDC Motor Drive Addagatla Nagaraju Lecturer
Lecture 7: Synchronous Motor Drives
 1 / 46 Lecture 7: Synchronous Motor Drives ELEC-E8402 Control of Electric Drives and Power Converters (5 ECTS) Marko Hinkkanen Spring 2017 2 / 46 Learning Outcomes After this lecture and exercises you
1 / 46 Lecture 7: Synchronous Motor Drives ELEC-E8402 Control of Electric Drives and Power Converters (5 ECTS) Marko Hinkkanen Spring 2017 2 / 46 Learning Outcomes After this lecture and exercises you
Modelling of Closed Loop Speed Control for Pmsm Drive
 Modelling of Closed Loop Speed Control for Pmsm Drive Vikram S. Sathe, Shankar S. Vanamane M. Tech Student, Department of Electrical Engg, Walchand College of Engineering, Sangli. Associate Prof, Department
Modelling of Closed Loop Speed Control for Pmsm Drive Vikram S. Sathe, Shankar S. Vanamane M. Tech Student, Department of Electrical Engg, Walchand College of Engineering, Sangli. Associate Prof, Department
Lecture 8: Sensorless Synchronous Motor Drives
 1 / 22 Lecture 8: Sensorless Synchronous Motor Drives ELEC-E8402 Control of Electric Drives and Power Converters (5 ECTS) Marko Hinkkanen Spring 2017 2 / 22 Learning Outcomes After this lecture and exercises
1 / 22 Lecture 8: Sensorless Synchronous Motor Drives ELEC-E8402 Control of Electric Drives and Power Converters (5 ECTS) Marko Hinkkanen Spring 2017 2 / 22 Learning Outcomes After this lecture and exercises
A NOVEL FLUX-SPACE-VECTOR-BASED DIRECT TORQUE CONTROL SCHEME FOR PMSG USED IN VARIABLE-SPEED DIRECT-DRIVE WECS
 A NOVEL FLUX-SPACE-VECTOR-BASED DIRECT TORQUE CONTROL SCHEME FOR PMSG USED IN VARIABLE-SPEED DIRECT-DRIVE WECS B.VENKATESWARARAJU 1, B. YELLA REDDY 2 1 Mtech Scholar, 2 Assistant Professor Department of
A NOVEL FLUX-SPACE-VECTOR-BASED DIRECT TORQUE CONTROL SCHEME FOR PMSG USED IN VARIABLE-SPEED DIRECT-DRIVE WECS B.VENKATESWARARAJU 1, B. YELLA REDDY 2 1 Mtech Scholar, 2 Assistant Professor Department of
Mathematical Modeling and Dynamic Simulation of a Class of Drive Systems with Permanent Magnet Synchronous Motors
 Applied and Computational Mechanics 3 (2009) 331 338 Mathematical Modeling and Dynamic Simulation of a Class of Drive Systems with Permanent Magnet Synchronous Motors M. Mikhov a, a Faculty of Automatics,
Applied and Computational Mechanics 3 (2009) 331 338 Mathematical Modeling and Dynamic Simulation of a Class of Drive Systems with Permanent Magnet Synchronous Motors M. Mikhov a, a Faculty of Automatics,
Magnetic Saturation and Iron Loss Influence on Max Torque per Ampere Current Vector Variation of Synchronous Reluctance Machine
 EVS28 KINTEX, Korea, May 3-6, 215 Magnetic Saturation and Iron Loss Influence on Max Torque per Ampere Current Vector Variation of Synchronous Reluctance Machine Huai-Cong Liu 1, In-Gun Kim 1, Ju lee 1
EVS28 KINTEX, Korea, May 3-6, 215 Magnetic Saturation and Iron Loss Influence on Max Torque per Ampere Current Vector Variation of Synchronous Reluctance Machine Huai-Cong Liu 1, In-Gun Kim 1, Ju lee 1
Research on Permanent Magnet Linear Synchronous Motor Control System Simulation *
 Available online at www.sciencedirect.com AASRI Procedia 3 (2012 ) 262 269 2012 AASRI Conference on Modeling, Identification and Control Research on Permanent Magnet Linear Synchronous Motor Control System
Available online at www.sciencedirect.com AASRI Procedia 3 (2012 ) 262 269 2012 AASRI Conference on Modeling, Identification and Control Research on Permanent Magnet Linear Synchronous Motor Control System
Third harmonic current injection into highly saturated multi-phase machines
 ARCHIVES OF ELECTRICAL ENGINEERING VOL. 66(1), pp. 179-187 (017) DOI 10.1515/aee-017-001 Third harmonic current injection into highly saturated multi-phase machines FELIX KLUTE, TORBEN JONSKY Ostermeyerstraße
ARCHIVES OF ELECTRICAL ENGINEERING VOL. 66(1), pp. 179-187 (017) DOI 10.1515/aee-017-001 Third harmonic current injection into highly saturated multi-phase machines FELIX KLUTE, TORBEN JONSKY Ostermeyerstraße
Sensorless Control for High-Speed BLDC Motors With Low Inductance and Nonideal Back EMF
 Sensorless Control for High-Speed BLDC Motors With Low Inductance and Nonideal Back EMF P.Suganya Assistant Professor, Department of EEE, Bharathiyar Institute of Engineering for Women Salem (DT). Abstract
Sensorless Control for High-Speed BLDC Motors With Low Inductance and Nonideal Back EMF P.Suganya Assistant Professor, Department of EEE, Bharathiyar Institute of Engineering for Women Salem (DT). Abstract
A Direct Torque Controlled Induction Motor with Variable Hysteresis Band
 UKSim 2009: th International Conference on Computer Modelling and Simulation A Direct Torque Controlled Induction Motor with Variable Hysteresis Band Kanungo Barada Mohanty Electrical Engineering Department,
UKSim 2009: th International Conference on Computer Modelling and Simulation A Direct Torque Controlled Induction Motor with Variable Hysteresis Band Kanungo Barada Mohanty Electrical Engineering Department,
Open Access Permanent Magnet Synchronous Motor Vector Control Based on Weighted Integral Gain of Sliding Mode Variable Structure
 Send Orders for Reprints to reprints@benthamscienceae The Open Automation and Control Systems Journal, 5, 7, 33-33 33 Open Access Permanent Magnet Synchronous Motor Vector Control Based on Weighted Integral
Send Orders for Reprints to reprints@benthamscienceae The Open Automation and Control Systems Journal, 5, 7, 33-33 33 Open Access Permanent Magnet Synchronous Motor Vector Control Based on Weighted Integral
Three phase induction motor using direct torque control by Matlab Simulink
 Three phase induction motor using direct torque control by Matlab Simulink Arun Kumar Yadav 1, Dr. Vinod Kumar Singh 2 1 Reaserch Scholor SVU Gajraula Amroha, U.P. 2 Assistant professor ABSTRACT Induction
Three phase induction motor using direct torque control by Matlab Simulink Arun Kumar Yadav 1, Dr. Vinod Kumar Singh 2 1 Reaserch Scholor SVU Gajraula Amroha, U.P. 2 Assistant professor ABSTRACT Induction
1863. Active-disturbance rejection control based on a novel sliding mode observer for PMSM speed and rotor position
 1863. Active-disturbance rejection control based on a novel sliding mode observer for PMSM speed and rotor position Zhongcai Qiu 1, Jian Xiao 2, Song Wang 3 School of Electrical Engineering, Southwest
1863. Active-disturbance rejection control based on a novel sliding mode observer for PMSM speed and rotor position Zhongcai Qiu 1, Jian Xiao 2, Song Wang 3 School of Electrical Engineering, Southwest
Robust Non-Linear Direct Torque and Flux Control of Adjustable Speed Sensorless PMSM Drive Based on SVM Using a PI Predictive Controller
 Journal of Engineering Science and Technology Review 3 (1) (2010) 168-175 Research Article JOURNAL OF Engineering Science and Technology Review www.jestr.org Robust Non-Linear Direct Torque and Flux Control
Journal of Engineering Science and Technology Review 3 (1) (2010) 168-175 Research Article JOURNAL OF Engineering Science and Technology Review www.jestr.org Robust Non-Linear Direct Torque and Flux Control
Independent Control of Speed and Torque in a Vector Controlled Induction Motor Drive using Predictive Current Controller and SVPWM
 Independent Control of Speed and Torque in a Vector Controlled Induction Motor Drive using Predictive Current Controller and SVPWM Vandana Peethambaran 1, Dr.R.Sankaran 2 Assistant Professor, Dept. of
Independent Control of Speed and Torque in a Vector Controlled Induction Motor Drive using Predictive Current Controller and SVPWM Vandana Peethambaran 1, Dr.R.Sankaran 2 Assistant Professor, Dept. of
Sensorless Speed Control for PMSM Based On the DTC Method with Adaptive System R. Balachandar 1, S. Vinoth kumar 2, C. Vignesh 3
 Sensorless Speed Control for PMSM Based On the DTC Method with Adaptive System R. Balachandar 1, S. Vinoth kumar 2, C. Vignesh 3 P.G Scholar, Sri Subramanya College of Engg & Tech, Palani, Tamilnadu, India
Sensorless Speed Control for PMSM Based On the DTC Method with Adaptive System R. Balachandar 1, S. Vinoth kumar 2, C. Vignesh 3 P.G Scholar, Sri Subramanya College of Engg & Tech, Palani, Tamilnadu, India
Sensorless Sliding Mode Control of Induction Motor Drives
 Sensorless Sliding Mode Control of Induction Motor Drives Kanungo Barada Mohanty Electrical Engineering Department, National Institute of Technology, Rourkela-7698, India E-mail: kbmohanty@nitrkl.ac.in
Sensorless Sliding Mode Control of Induction Motor Drives Kanungo Barada Mohanty Electrical Engineering Department, National Institute of Technology, Rourkela-7698, India E-mail: kbmohanty@nitrkl.ac.in
1439. Numerical simulation of the magnetic field and electromagnetic vibration analysis of the AC permanent-magnet synchronous motor
 1439. Numerical simulation of the magnetic field and electromagnetic vibration analysis of the AC permanent-magnet synchronous motor Bai-zhou Li 1, Yu Wang 2, Qi-chang Zhang 3 1, 2, 3 School of Mechanical
1439. Numerical simulation of the magnetic field and electromagnetic vibration analysis of the AC permanent-magnet synchronous motor Bai-zhou Li 1, Yu Wang 2, Qi-chang Zhang 3 1, 2, 3 School of Mechanical
Reduced-Order Square-Root EKF for Sensorless Control of PMSM Drives
 Reduced-Order Square-Root EKF for Sensorless Control of PMSM Drives Václav Šmídl Institute of Information Theory and Automation Prague, Czech Republic email: smidl@utia.cas.cz Zdeněk Peroutka Regional
Reduced-Order Square-Root EKF for Sensorless Control of PMSM Drives Václav Šmídl Institute of Information Theory and Automation Prague, Czech Republic email: smidl@utia.cas.cz Zdeněk Peroutka Regional
This is a repository copy of Influence of skew and cross-coupling on flux-weakening performance of permanent-magnet brushless AC machines.
 This is a repository copy of Influence of skew and cross-coupling on flux-weakening performance of permanent-magnet brushless AC machines. White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/8610/
This is a repository copy of Influence of skew and cross-coupling on flux-weakening performance of permanent-magnet brushless AC machines. White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/8610/
CHAPTER 2 MODELLING OF INTERIOR PERMANENT MAGNET SYNCHRONOUS MOTOR
 21 CHAPTER 2 MODELLING OF INTERIOR PERMANENT MAGNET SYNCHRONOUS MOTOR 2.1 INTRODUCTION The need for adjustable speed drives in industrial applications has been increasing progressively. The variable speed
21 CHAPTER 2 MODELLING OF INTERIOR PERMANENT MAGNET SYNCHRONOUS MOTOR 2.1 INTRODUCTION The need for adjustable speed drives in industrial applications has been increasing progressively. The variable speed
A Novel Adaptive Estimation of Stator and Rotor Resistance for Induction Motor Drives
 A Novel Adaptive Estimation of Stator and Rotor Resistance for Induction Motor Drives Nagaraja Yadav Ponagani Asst.Professsor, Department of Electrical & Electronics Engineering Dhurva Institute of Engineering
A Novel Adaptive Estimation of Stator and Rotor Resistance for Induction Motor Drives Nagaraja Yadav Ponagani Asst.Professsor, Department of Electrical & Electronics Engineering Dhurva Institute of Engineering
Hybrid Excited Vernier Machines with All Excitation Sources on the Stator for Electric Vehicles
 Progress In Electromagnetics Research M, Vol. 6, 113 123, 16 Hybrid Excited Vernier Machines with All Excitation Sources on the Stator for Electric Vehicles Liang Xu, Guohai Liu, Wenxiang Zhao *, and Jinghua
Progress In Electromagnetics Research M, Vol. 6, 113 123, 16 Hybrid Excited Vernier Machines with All Excitation Sources on the Stator for Electric Vehicles Liang Xu, Guohai Liu, Wenxiang Zhao *, and Jinghua
Speed Sensor less Control and Estimation Based on Mars for Pmsm under Sudden Load Change
 International Journal of Engineering Inventions e-issn: 2278-7461, p-isbn: 2319-6491 Volume 2, Issue 3 (February 2013) PP: 77-86 Speed Sensor less Control and Estimation Based on Mars for Pmsm under Sudden
International Journal of Engineering Inventions e-issn: 2278-7461, p-isbn: 2319-6491 Volume 2, Issue 3 (February 2013) PP: 77-86 Speed Sensor less Control and Estimation Based on Mars for Pmsm under Sudden
THE approach of sensorless speed control of induction motors
 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 41, NO. 4, JULY/AUGUST 2005 1039 An Adaptive Sliding-Mode Observer for Induction Motor Sensorless Speed Control Jingchuan Li, Longya Xu, Fellow, IEEE, and
IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 41, NO. 4, JULY/AUGUST 2005 1039 An Adaptive Sliding-Mode Observer for Induction Motor Sensorless Speed Control Jingchuan Li, Longya Xu, Fellow, IEEE, and
DESIGN AND IMPLEMENTATION OF SENSORLESS SPEED CONTROL FOR INDUCTION MOTOR DRIVE USING AN OPTIMIZED EXTENDED KALMAN FILTER
 INTERNATIONAL JOURNAL OF ELECTRONICS AND COMMUNICATION ENGINEERING & TECHNOLOGY (IJECET) International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 ISSN 0976 6464(Print)
INTERNATIONAL JOURNAL OF ELECTRONICS AND COMMUNICATION ENGINEERING & TECHNOLOGY (IJECET) International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 ISSN 0976 6464(Print)
A New Predictive Control Strategy Dedicated to Salient Pole Synchronous Machines
 A New Predictive Control Strategy Dedicated to Salient Pole Synchronous Machines Nicolas Patin Member IEEE University of Technology of Compiègne Laboratoire d Electromécanique de Compiègne Rue Personne
A New Predictive Control Strategy Dedicated to Salient Pole Synchronous Machines Nicolas Patin Member IEEE University of Technology of Compiègne Laboratoire d Electromécanique de Compiègne Rue Personne
Backstepping Control of Speed Sensorless Permanent Magnet Synchronous Motor Based on Slide Model Observer
 International Journal of Automation and Computing 1(), April 015, 149-155 DOI: 10.1007/s11633-015-0881- Backstepping Control of Speed Sensorless Permanent Magnet Synchronous Motor Based on Slide Model
International Journal of Automation and Computing 1(), April 015, 149-155 DOI: 10.1007/s11633-015-0881- Backstepping Control of Speed Sensorless Permanent Magnet Synchronous Motor Based on Slide Model
Speed Control of Induction Motor Drives using Nonlinear Adaptive Controller
 Speed Control of Induction Motor Drives using Nonlinear Adaptive Controller 1 Sarojini.P, 2 Mr. R Issan Raj M.E Control and Instrumentation Engineering Valliammai Engineering College Kancheepuram District
Speed Control of Induction Motor Drives using Nonlinear Adaptive Controller 1 Sarojini.P, 2 Mr. R Issan Raj M.E Control and Instrumentation Engineering Valliammai Engineering College Kancheepuram District
A Novel Three-phase Matrix Converter Based Induction Motor Drive Using Power Factor Control
 Australian Journal of Basic and Applied Sciences, 8(4) Special 214, Pages: 49-417 AENSI Journals Australian Journal of Basic and Applied Sciences ISSN:1991-8178 Journal home page: www.ajbasweb.com A Novel
Australian Journal of Basic and Applied Sciences, 8(4) Special 214, Pages: 49-417 AENSI Journals Australian Journal of Basic and Applied Sciences ISSN:1991-8178 Journal home page: www.ajbasweb.com A Novel
POLITECNICO DI TORINO Repository ISTITUZIONALE
 POLITECNICO DI TORINO Repository ISTITUZIONALE Position-sensorless control of permanent-magnet-assisted synchronous reluctance motor Original Position-sensorless control of permanent-magnet-assisted synchronous
POLITECNICO DI TORINO Repository ISTITUZIONALE Position-sensorless control of permanent-magnet-assisted synchronous reluctance motor Original Position-sensorless control of permanent-magnet-assisted synchronous
Implementation of Twelve-Sector based Direct Torque Control for Induction motor
 International Journal of Engineering Science Invention ISSN (Online): 2319 6734, ISSN (Print): 2319 6726 Volume 2 Issue 4 ǁ April. 2013 ǁ PP.32-37 Implementation of Twelve-Sector based Direct Torque Control
International Journal of Engineering Science Invention ISSN (Online): 2319 6734, ISSN (Print): 2319 6726 Volume 2 Issue 4 ǁ April. 2013 ǁ PP.32-37 Implementation of Twelve-Sector based Direct Torque Control
Novel DTC-SVM for an Adjustable Speed Sensorless Induction Motor Drive
 Novel DTC-SVM for an Adjustable Speed Sensorless Induction Motor Drive Nazeer Ahammad S1, Sadik Ahamad Khan2, Ravi Kumar Reddy P3, Prasanthi M4 1*Pursuing M.Tech in the field of Power Electronics 2*Working
Novel DTC-SVM for an Adjustable Speed Sensorless Induction Motor Drive Nazeer Ahammad S1, Sadik Ahamad Khan2, Ravi Kumar Reddy P3, Prasanthi M4 1*Pursuing M.Tech in the field of Power Electronics 2*Working
Backstepping Control with Integral Action of PMSM Integrated According to the MRAS Observer
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 232-3331, Volume 9, Issue 4 Ver. I (Jul Aug. 214), PP 59-68 Backstepping Control with Integral Action of PMSM
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 232-3331, Volume 9, Issue 4 Ver. I (Jul Aug. 214), PP 59-68 Backstepping Control with Integral Action of PMSM
IN the above paper [1] the local observability of the induction machine (IM) and the permanent
![IN the above paper [1] the local observability of the induction machine (IM) and the permanent](/thumbs/93/112641715.jpg "IN the above paper [1] the local observability of the induction machine (IM) and the permanent") IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS 1 Discussion on AC Drive Observability Analysis Mohamad Koteich, Student Member, IEEE, Abdelmalek Maloum, Gilles Duc and Guillaume Sandou arxiv:1512.01462v1
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS 1 Discussion on AC Drive Observability Analysis Mohamad Koteich, Student Member, IEEE, Abdelmalek Maloum, Gilles Duc and Guillaume Sandou arxiv:1512.01462v1
II. Mathematical Modeling of
 SICE Annual Conference in Fukui, August 4-62003 Fukui University, Japan MRAS Based Sensorless Control of Permanent Magnet Synchronous Motor Young Sam Kim, Sang Kyoon Kim and Young Ahn Kwon Department of
SICE Annual Conference in Fukui, August 4-62003 Fukui University, Japan MRAS Based Sensorless Control of Permanent Magnet Synchronous Motor Young Sam Kim, Sang Kyoon Kim and Young Ahn Kwon Department of
Anakapalli Andhra Pradesh, India I. INTRODUCTION
 Robust MRAS Based Sensorless Rotor Speed Measurement of Induction Motor against Variations in Stator Resistance Using Combination of Back Emf and Reactive Power Methods Srikanth Mandarapu Pydah College
Robust MRAS Based Sensorless Rotor Speed Measurement of Induction Motor against Variations in Stator Resistance Using Combination of Back Emf and Reactive Power Methods Srikanth Mandarapu Pydah College
Mathematical Modelling of Permanent Magnet Synchronous Motor with Rotor Frame of Reference
 Mathematical Modelling of Permanent Magnet Synchronous Motor with Rotor Frame of Reference Mukesh C Chauhan 1, Hitesh R Khunt 2 1 P.G Student (Electrical),2 Electrical Department, AITS, rajkot 1 mcchauhan1@aits.edu.in
Mathematical Modelling of Permanent Magnet Synchronous Motor with Rotor Frame of Reference Mukesh C Chauhan 1, Hitesh R Khunt 2 1 P.G Student (Electrical),2 Electrical Department, AITS, rajkot 1 mcchauhan1@aits.edu.in
Improved Sliding Mode Observer for Position Sensorless Open-Winding Permanent Magnet Brushless Motor Drives
 Progress In Electromagnetics Research M, Vol. 77, 147 156, 219 Improved Sliding Mode Observer for Position Sensorless Open-Winding Permanent Magnet Brushless Motor Drives Qing Lu 1, 2,LiQuan 1, *, Xiaoyong
Progress In Electromagnetics Research M, Vol. 77, 147 156, 219 Improved Sliding Mode Observer for Position Sensorless Open-Winding Permanent Magnet Brushless Motor Drives Qing Lu 1, 2,LiQuan 1, *, Xiaoyong
Dynamic Modeling of Surface Mounted Permanent Synchronous Motor for Servo motor application
 797 Dynamic Modeling of Surface Mounted Permanent Synchronous Motor for Servo motor application Ritu Tak 1, Sudhir Y Kumar 2, B.S.Rajpurohit 3 1,2 Electrical Engineering, Mody University of Science & Technology,
797 Dynamic Modeling of Surface Mounted Permanent Synchronous Motor for Servo motor application Ritu Tak 1, Sudhir Y Kumar 2, B.S.Rajpurohit 3 1,2 Electrical Engineering, Mody University of Science & Technology,
Towards an Improved Energy Efficiency of the Interior Permanent Magnet Synchronous Motor Drives
 SERBIAN JOURNAL OF ELECTRICAL ENGINEERING Vol. 11, No., June 014, 57-68 UDC: 61.311-5:61.313.33]:60.9 DOI: 10.98/SJEE131701G Towards an Improved Energy Efficiency of the Interior Permanent Magnet Synchronous
SERBIAN JOURNAL OF ELECTRICAL ENGINEERING Vol. 11, No., June 014, 57-68 UDC: 61.311-5:61.313.33]:60.9 DOI: 10.98/SJEE131701G Towards an Improved Energy Efficiency of the Interior Permanent Magnet Synchronous
Sensorless DTC-SVM of Induction Motor by Applying Two Neural Controllers
 Sensorless DTC-SVM of Induction Motor by Applying Two Neural Controllers Abdallah Farahat Mahmoud Dept. of Electrical Engineering, Al-Azhar University, Qena, Egypt engabdallah2012@azhar.edu.eg Adel S.
Sensorless DTC-SVM of Induction Motor by Applying Two Neural Controllers Abdallah Farahat Mahmoud Dept. of Electrical Engineering, Al-Azhar University, Qena, Egypt engabdallah2012@azhar.edu.eg Adel S.
A new FOC technique based on predictive current control for PMSM drive
 ISSN 1 746-7, England, UK World Journal of Modelling and Simulation Vol. 5 (009) No. 4, pp. 87-94 A new FOC technique based on predictive current control for PMSM drive F. Heydari, A. Sheikholeslami, K.
ISSN 1 746-7, England, UK World Journal of Modelling and Simulation Vol. 5 (009) No. 4, pp. 87-94 A new FOC technique based on predictive current control for PMSM drive F. Heydari, A. Sheikholeslami, K.
MODELLING ANALYSIS & DESIGN OF DSP BASED NOVEL SPEED SENSORLESS VECTOR CONTROLLER FOR INDUCTION MOTOR DRIVE
 International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 6, Issue 3, March, 2015, pp. 70-81, Article ID: IJARET_06_03_008 Available online at http://www.iaeme.com/ijaret/issues.asp?jtypeijaret&vtype=6&itype=3
International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 6, Issue 3, March, 2015, pp. 70-81, Article ID: IJARET_06_03_008 Available online at http://www.iaeme.com/ijaret/issues.asp?jtypeijaret&vtype=6&itype=3
the machine makes analytic calculation of rotor position impossible for a given flux linkage and current value.
 COMPARISON OF FLUX LINKAGE ESTIMATORS IN POSITION SENSORLESS SWITCHED RELUCTANCE MOTOR DRIVES Erkan Mese Kocaeli University / Technical Education Faculty zmit/kocaeli-turkey email: emese@kou.edu.tr ABSTRACT
COMPARISON OF FLUX LINKAGE ESTIMATORS IN POSITION SENSORLESS SWITCHED RELUCTANCE MOTOR DRIVES Erkan Mese Kocaeli University / Technical Education Faculty zmit/kocaeli-turkey email: emese@kou.edu.tr ABSTRACT
Zero speed sensorless drive capability of fractional slot inset PM machine
 Zero speed sensorless drive capability of fractional slot inset PM Adriano Faggion Nicola Bianchi Silverio Bolognani Emanuele Fornasiero Electric Drives Laboratory Department of Industrial Engineering
Zero speed sensorless drive capability of fractional slot inset PM Adriano Faggion Nicola Bianchi Silverio Bolognani Emanuele Fornasiero Electric Drives Laboratory Department of Industrial Engineering
POSITION/SPEED SENSORLESS CONTROL FOR PERMANENT-MAGNET SYNCHRONOUS MACHINES
 University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Theses, Dissertations, and Student Research from Electrical & Computer Engineering Electrical & Computer Engineering, Department
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Theses, Dissertations, and Student Research from Electrical & Computer Engineering Electrical & Computer Engineering, Department
Estimation of speed in linear induction motor drive by MRAS using neural network and sliding mode control
 Estimation of speed in linear induction motor drive by MRAS using neural network and sliding mode control M. Anka Rao 1, M. Vijaya kumar 2, O. Yugeswar Reddy 3 1 Asst. Professor, Dept. of Electrical Engg.,
Estimation of speed in linear induction motor drive by MRAS using neural network and sliding mode control M. Anka Rao 1, M. Vijaya kumar 2, O. Yugeswar Reddy 3 1 Asst. Professor, Dept. of Electrical Engg.,
PERFORMANCE ANALYSIS OF DIRECT TORQUE CONTROL OF 3-PHASE INDUCTION MOTOR
 PERFORMANCE ANALYSIS OF DIRECT TORQUE CONTROL OF 3-PHASE INDUCTION MOTOR 1 A.PANDIAN, 2 Dr.R.DHANASEKARAN 1 Associate Professor., Department of Electrical and Electronics Engineering, Angel College of
PERFORMANCE ANALYSIS OF DIRECT TORQUE CONTROL OF 3-PHASE INDUCTION MOTOR 1 A.PANDIAN, 2 Dr.R.DHANASEKARAN 1 Associate Professor., Department of Electrical and Electronics Engineering, Angel College of
The Application of Anti-windup PI Controller, SIPIC on FOC of PMSM
 Electrical and Electronic Engineering 2016, 6(3): 39-48 DOI: 10.5923/j.eee.20160603.01 The Application of Anti-windup PI Controller, SIPIC on FOC of PMSM Hoo Choon Lih School of Engineering, Taylor s University,
Electrical and Electronic Engineering 2016, 6(3): 39-48 DOI: 10.5923/j.eee.20160603.01 The Application of Anti-windup PI Controller, SIPIC on FOC of PMSM Hoo Choon Lih School of Engineering, Taylor s University,
High Performance and Reliable Torque Control of Permanent Magnet Synchronous Motors in Electric Vehicle Applications
 http://dx.doi.org/10.5755/j01.eee.19.7.159 ELEKTRONIKA IR ELEKTROTECHNIKA, ISSN 139-115, VOL. 19, NO. 7, 013 High Performance and Reliable Torque Control of Permanent Magnet Synchronous Motors in Electric
http://dx.doi.org/10.5755/j01.eee.19.7.159 ELEKTRONIKA IR ELEKTROTECHNIKA, ISSN 139-115, VOL. 19, NO. 7, 013 High Performance and Reliable Torque Control of Permanent Magnet Synchronous Motors in Electric
Design and implementation of a sliding-mode observer of the rotor flux and rotor speed in induction machines
 1 Design and implementation of a sliding-mode observer of the rotor flux and rotor speed in induction machines João Ferraz, Paulo Branco Phd. Abstract A sliding-mode observer for the rotor flux and speed
1 Design and implementation of a sliding-mode observer of the rotor flux and rotor speed in induction machines João Ferraz, Paulo Branco Phd. Abstract A sliding-mode observer for the rotor flux and speed
ISSN: (Online) Volume 2, Issue 2, February 2014 International Journal of Advance Research in Computer Science and Management Studies
 Volume 2, Issue 2, February 2014 International Journal of Advance Research in Computer Science and Management Studies") ISSN: 2321-7782 (Online) Volume 2, Issue 2, February 2014 International Journal of Advance Research in Computer Science and Management Studies Research Article / Paper / Case Study Available online at:
ISSN: 2321-7782 (Online) Volume 2, Issue 2, February 2014 International Journal of Advance Research in Computer Science and Management Studies Research Article / Paper / Case Study Available online at:
Wide-Speed Operation of Direct Torque-Controlled Interior Permanent-Magnet Synchronous Motors
 Wide-Speed Operation of Direct Torque-Controlled Interior Permanent-Magnet Synchronous Motors Adina Muntean, M.M. Radulescu Small Electric Motors and Electric Traction (SEMET) Group, Technical University
Wide-Speed Operation of Direct Torque-Controlled Interior Permanent-Magnet Synchronous Motors Adina Muntean, M.M. Radulescu Small Electric Motors and Electric Traction (SEMET) Group, Technical University
Sensorless Output Tracking Control for Permanent Magnet Synchronous Machine based on T-S Fuzzy Approach
 International Journal of Electrical Engineering. ISSN 974-2158 Volume 4, Number 8 (211), pp. 899-911 International Research Publication House http://www.irphouse.com Sensorless Output Tracking Control
International Journal of Electrical Engineering. ISSN 974-2158 Volume 4, Number 8 (211), pp. 899-911 International Research Publication House http://www.irphouse.com Sensorless Output Tracking Control
Maximum power per VA control of vector controlled interior permanent magnet motor
 Sådhanå (018) 43:50 Ó Indian Academy of Sciences https://doi.org/10.1007/s1046-018-0817-ysadhana(013456789().,-volv)ft3 ](013456789().,-volV) Maximum power per VA control of vector controlled interior
Sådhanå (018) 43:50 Ó Indian Academy of Sciences https://doi.org/10.1007/s1046-018-0817-ysadhana(013456789().,-volv)ft3 ](013456789().,-volV) Maximum power per VA control of vector controlled interior
Speed Control of PMSM Drives by Using Neural Network Controller
 Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 4, Number 4 (2014), pp. 353-360 Research India Publications http://www.ripublication.com/aeee.htm Speed Control of PMSM Drives by
Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 4, Number 4 (2014), pp. 353-360 Research India Publications http://www.ripublication.com/aeee.htm Speed Control of PMSM Drives by
SPEED CONTROL OF PMSM BY USING DSVM -DTC TECHNIQUE
 SPEED CONTROL OF PMSM BY USING DSVM -DTC TECHNIQUE J Sinivas Rao #1, S Chandra Sekhar *2, T Raghu #3 1 Asst Prof, Dept Of EEE, Anurag Engineering College, AP, INDIA 3 Asst Prof, Dept Of EEE, Anurag Engineering
SPEED CONTROL OF PMSM BY USING DSVM -DTC TECHNIQUE J Sinivas Rao #1, S Chandra Sekhar *2, T Raghu #3 1 Asst Prof, Dept Of EEE, Anurag Engineering College, AP, INDIA 3 Asst Prof, Dept Of EEE, Anurag Engineering
Digital Object Identifier: /ICELMACH URL:
 J. Beerten, J. Vervecen, and J. Driesen, Prediction-based ripple reduction in direct torque control of an induction machine, Proc. IEEE International Conference on Electrical Machines ICEM 8, Villamoura,
J. Beerten, J. Vervecen, and J. Driesen, Prediction-based ripple reduction in direct torque control of an induction machine, Proc. IEEE International Conference on Electrical Machines ICEM 8, Villamoura,
Analysis, Design, Implementation of Sensorless V/f control in a Surface Mounted PMSM without damper winding
 Analysis, Design, Implementation of Sensorless V/f control in a Surface Mounted PMSM without damper winding Sourabh Paitandi 1, Mainak Sengupta 2 Dept. of Electrical Engineering, Indian Institute of Engineering
Analysis, Design, Implementation of Sensorless V/f control in a Surface Mounted PMSM without damper winding Sourabh Paitandi 1, Mainak Sengupta 2 Dept. of Electrical Engineering, Indian Institute of Engineering
Speed Sensorless Control of a Long-Stator Linear Synchronous-Motor arranged by Multiple Sections
 Speed Sensorless Control of a Long-Stator Linear Synchronous-Motor arranged by Multiple Sections Roberto Leidhold Peter Mutschler Department of Power Electronics and Control of Drives Darmsta University
Speed Sensorless Control of a Long-Stator Linear Synchronous-Motor arranged by Multiple Sections Roberto Leidhold Peter Mutschler Department of Power Electronics and Control of Drives Darmsta University
Maximum Torque per Ampere and Maximum Efficiency Control Methods based on V/f Control for IPM Synchronous Motors
 IEEJ Journal of Industry Applications Vol.3 No.2 pp.112 120 DOI: 10.1541/ieejjia.3.112 Maximum Torque per Ampere and Maximum Efficiency Control Methods based on V/f Control for IPM Synchronous Motors Jun-ichi
IEEJ Journal of Industry Applications Vol.3 No.2 pp.112 120 DOI: 10.1541/ieejjia.3.112 Maximum Torque per Ampere and Maximum Efficiency Control Methods based on V/f Control for IPM Synchronous Motors Jun-ichi
Four-Switch Inverter-Fed Direct Torque control of Three Phase Induction Motor
 Four-Switch Inverter-Fed Direct Torque control of Three Phase Induction Motor R.Dharmaprakash 1, Joseph Henry 2, P.Gowtham 3 Research Scholar, Department of EEE, JNT University, Hyderabad, India 1 Professor,
Four-Switch Inverter-Fed Direct Torque control of Three Phase Induction Motor R.Dharmaprakash 1, Joseph Henry 2, P.Gowtham 3 Research Scholar, Department of EEE, JNT University, Hyderabad, India 1 Professor,
A Robust Nonlinear Luenberger Observer for the Sensorless Control of SM-PMSM: Rotor Position and Magnets Flux Estimation
 A Robust Nonlinear Luenberger Observer for the Sensorless Control of SM-PMSM: Rotor Position and Magnets Flux Estimation Nicolas Henwood 1, 2, Jeremy Malaize 1, and Laurent Praly 2 1 Control, Signal and
A Robust Nonlinear Luenberger Observer for the Sensorless Control of SM-PMSM: Rotor Position and Magnets Flux Estimation Nicolas Henwood 1, 2, Jeremy Malaize 1, and Laurent Praly 2 1 Control, Signal and
AC Induction Motor Stator Resistance Estimation Algorithm
 7th WSEAS International Conference on Electric Power Systems, High Voltages, Electric Machines, Venice, Italy, November 21-23, 27 86 AC Induction Motor Stator Resistance Estimation Algorithm PETR BLAHA
7th WSEAS International Conference on Electric Power Systems, High Voltages, Electric Machines, Venice, Italy, November 21-23, 27 86 AC Induction Motor Stator Resistance Estimation Algorithm PETR BLAHA
A Novel Method on Disturbance Analysis and Feed-forward Compensation in Permanent Magnet Linear Motor System
 A Novel Method on Disturbance Analysis and Feed-forward Compensation in Permanent Magnet Linear Motor System Jonghwa Kim, Kwanghyun Cho, Hojin Jung, and Seibum Choi Department of Mechanical Engineering
A Novel Method on Disturbance Analysis and Feed-forward Compensation in Permanent Magnet Linear Motor System Jonghwa Kim, Kwanghyun Cho, Hojin Jung, and Seibum Choi Department of Mechanical Engineering
ECE 585 Power System Stability
 Homework 1, Due on January 29 ECE 585 Power System Stability Consider the power system below. The network frequency is 60 Hz. At the pre-fault steady state (a) the power generated by the machine is 400
Homework 1, Due on January 29 ECE 585 Power System Stability Consider the power system below. The network frequency is 60 Hz. At the pre-fault steady state (a) the power generated by the machine is 400
Accurate Joule Loss Estimation for Rotating Machines: An Engineering Approach
 Accurate Joule Loss Estimation for Rotating Machines: An Engineering Approach Adeeb Ahmed Department of Electrical and Computer Engineering North Carolina State University Raleigh, NC, USA aahmed4@ncsu.edu
Accurate Joule Loss Estimation for Rotating Machines: An Engineering Approach Adeeb Ahmed Department of Electrical and Computer Engineering North Carolina State University Raleigh, NC, USA aahmed4@ncsu.edu
Torque Performance and Permanent Magnet Arrangement for Interior Permanent Magnet Synchronous Motor
 Extended Summary pp.954 960 Torque Performance and Permanent Magnet Arrangement for Interior Permanent Magnet Synchronous Motor Naohisa Matsumoto Student Member (Osaka Prefecture University, matumoto@eis.osakafu-u.ac.jp)
Extended Summary pp.954 960 Torque Performance and Permanent Magnet Arrangement for Interior Permanent Magnet Synchronous Motor Naohisa Matsumoto Student Member (Osaka Prefecture University, matumoto@eis.osakafu-u.ac.jp)
Unity Power Factor Control of Permanent Magnet Motor Drive System
 Unity Power Factor Control of Permanent Magnet Motor Drive System M. F. Moussa* A. Helal Y. Gaber H. A. Youssef (Arab Academy for science and technology) Alexandria University *mona.moussa@yahoo.com Abstract-The
Unity Power Factor Control of Permanent Magnet Motor Drive System M. F. Moussa* A. Helal Y. Gaber H. A. Youssef (Arab Academy for science and technology) Alexandria University *mona.moussa@yahoo.com Abstract-The
Direct Torque Control of Brushless DC Motor with Non-sinusoidal Back-EMF
 International Journal of Electrical Electronics Computers & Mechanical Engineering (IJEECM) ISSN: 2278-288 Volume 7 Issue 2 ǁ Feb. 217 IJEECM journal of Electrical Engineering (ijeecm-jee) Direct Torque
International Journal of Electrical Electronics Computers & Mechanical Engineering (IJEECM) ISSN: 2278-288 Volume 7 Issue 2 ǁ Feb. 217 IJEECM journal of Electrical Engineering (ijeecm-jee) Direct Torque
DIRECT TORQUE CONTROL OF PERMANENT MAGNET SYNCHRONOUS MOTOR USING TWO LEVEL INVERTER- SURVEY PAPER
 DIRECT TORQUE CONTROL OF PERMANENT MAGNET SYNCHRONOUS MOTOR USING TWO LEVEL INVERTER- SURVEY PAPER 1 PREETI SINGH, BHUPAL SINGH 1 M.Tech (scholar) Electrical Power & Energy System, lecturer Ajay Kumar
DIRECT TORQUE CONTROL OF PERMANENT MAGNET SYNCHRONOUS MOTOR USING TWO LEVEL INVERTER- SURVEY PAPER 1 PREETI SINGH, BHUPAL SINGH 1 M.Tech (scholar) Electrical Power & Energy System, lecturer Ajay Kumar
Study on Nonlinear Perpendicular Flux Observer for Direct-torque-controlled Induction Motor
 ISSN 1749-3889 (print), 1749-3897 (online) International Journal of Nonlinear Science Vol.6(2008) No.1,pp.73-78 Study on Nonlinear Perpendicular Flux Observer for Direct-torque-controlled Induction Motor
ISSN 1749-3889 (print), 1749-3897 (online) International Journal of Nonlinear Science Vol.6(2008) No.1,pp.73-78 Study on Nonlinear Perpendicular Flux Observer for Direct-torque-controlled Induction Motor
A New Model Reference Adaptive Formulation to Estimate Stator Resistance in Field Oriented Induction Motor Drive
 A New Model Reference Adaptive Formulation to Estimate Stator Resistance in Field Oriented Induction Motor Drive Saptarshi Basak 1, Chandan Chakraborty 1, Senior Member IEEE and Yoichi Hori 2, Fellow IEEE
A New Model Reference Adaptive Formulation to Estimate Stator Resistance in Field Oriented Induction Motor Drive Saptarshi Basak 1, Chandan Chakraborty 1, Senior Member IEEE and Yoichi Hori 2, Fellow IEEE
Kalman Filters Unifying Model-based and HF Injection-based Sensorless Control of PMSM Drives
 Kalman Filters Unifying Model-based and HF Injection-based Sensorless Control of PMSM Drives Václav Šmídl Institute of Information Theory and Automation Prague, Czech Republic email: smidl@utia.cas.cz
Kalman Filters Unifying Model-based and HF Injection-based Sensorless Control of PMSM Drives Václav Šmídl Institute of Information Theory and Automation Prague, Czech Republic email: smidl@utia.cas.cz
White Rose Research Online URL for this paper: Version: Accepted Version
 This is a repository copy of An Inverter Nonlinearity Independent Flux Observer for Direct Torque Controlled High Performance Interior Permanent Magnet Brushless AC Drives. White Rose Research Online URL
This is a repository copy of An Inverter Nonlinearity Independent Flux Observer for Direct Torque Controlled High Performance Interior Permanent Magnet Brushless AC Drives. White Rose Research Online URL
Influence of Permanent Magnet Properties and Arrangement on Performance of IPMSMs for Automotive Applications
 IEEJ Journal of Industry Applications Vol.6 No.6 pp.401 408 DOI: 10.1541/ieejjia.6.401 Influence of Permanent Magnet Properties and Arrangement on Performance of IPMSMs for Automotive Applications Yuki
IEEJ Journal of Industry Applications Vol.6 No.6 pp.401 408 DOI: 10.1541/ieejjia.6.401 Influence of Permanent Magnet Properties and Arrangement on Performance of IPMSMs for Automotive Applications Yuki
An adaptive sliding mode control scheme for induction motor drives
 An adaptive sliding mode control scheme for induction motor drives Oscar Barambones, Patxi Alkorta, Aitor J. Garrido, I. Garrido and F.J. Maseda ABSTRACT An adaptive sliding-mode control system, which
An adaptive sliding mode control scheme for induction motor drives Oscar Barambones, Patxi Alkorta, Aitor J. Garrido, I. Garrido and F.J. Maseda ABSTRACT An adaptive sliding-mode control system, which
International Journal of Advance Engineering and Research Development
 Scientific Journal of Impact Factor (SJIF): 4.7 International Journal of Advance Engineering and Research Development Volume 4, Issue 5, May-07 e-issn (O): 348-4470 p-issn (P): 348-6406 Mathematical modeling
Scientific Journal of Impact Factor (SJIF): 4.7 International Journal of Advance Engineering and Research Development Volume 4, Issue 5, May-07 e-issn (O): 348-4470 p-issn (P): 348-6406 Mathematical modeling
DEVELOPMENT OF DIRECT TORQUE CONTROL MODELWITH USING SVI FOR THREE PHASE INDUCTION MOTOR
 DEVELOPMENT OF DIRECT TORQUE CONTROL MODELWITH USING SVI FOR THREE PHASE INDUCTION MOTOR MUKESH KUMAR ARYA * Electrical Engg. Department, Madhav Institute of Technology & Science, Gwalior, Gwalior, 474005,
DEVELOPMENT OF DIRECT TORQUE CONTROL MODELWITH USING SVI FOR THREE PHASE INDUCTION MOTOR MUKESH KUMAR ARYA * Electrical Engg. Department, Madhav Institute of Technology & Science, Gwalior, Gwalior, 474005,
A sliding mode control for a wound rotor synchronous generator with an isolated RL load
 21 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 3-July 2, 21 ThA5.6 A sliding mode control for a wound rotor synchronous generator with an isolated RL load R.S. Muñoz-Aguilar,
21 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 3-July 2, 21 ThA5.6 A sliding mode control for a wound rotor synchronous generator with an isolated RL load R.S. Muñoz-Aguilar,
Robust sliding mode speed controller for hybrid SVPWM based direct torque control of induction motor
 ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 3 (2007) No. 3, pp. 180-188 Robust sliding mode speed controller for hybrid SVPWM based direct torque control of induction motor
ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 3 (2007) No. 3, pp. 180-188 Robust sliding mode speed controller for hybrid SVPWM based direct torque control of induction motor
Power density improvement of three phase flux reversal machine with distributed winding
 Published in IET Electric Power Applications Received on 4th January 2009 Revised on 2nd April 2009 ISSN 1751-8660 Power density improvement of three phase flux reversal machine with distributed winding
Published in IET Electric Power Applications Received on 4th January 2009 Revised on 2nd April 2009 ISSN 1751-8660 Power density improvement of three phase flux reversal machine with distributed winding