Identification of Finite Lattice Dynamical Systems
|
|
|
- Jared Daniel
- 6 years ago
- Views:
Transcription
1 Identification of Finite Lattice Dynamical Systems Junior Barrera BIOINFO-USP University of São Paulo, Brazil
2 Outline Introduction Lattice operator representation Lattice operator design Lattice dynamical systems (LDS) A simulator for chain dynamical systems LDS identification System identification examples Conclusion
3 Introduction
4 Dynamical Systems initial state x 2 = y 2 t t u u Final state Final state x 1 = y 1
5 Sequential Switching Circuits
6 Mathematical Morphology studies operators between complete lattices, what includes switching functions lattice operators are decomposed in terms of simple morphological operators: erosion, dilation, anti-erosion, anti-dilation Any lattice operator can be decomposed in a canonical morphological representation
7 Lattice Dynamical Systems We present the notion of Lattice Dynamical System (LDS) Give a representation for LDSs, based on canonical morphological representations Formalize the problem of statistical identification of LDSs,
8 Operator Representation
9 ψ : Fun[W, L] L
10 Intervals Let a, b Fun[W,L], a b iff a(x) b(x), x W W = 2 a b Interval [a,b] = {u Fun[W,L]: a u b}
11 Binary Sup-generating Sup-generating operator: ( u) = 1 u [ a, ] λ a, b b [a,b] λ a,b
12 Kernel Kernel of ψ at y: K(ψ)(y) = {u Fun[W,L]: y ψ(u)} K(ψ)(-2) K(ψ)(-1) K(ψ)(0) K(ψ)(1) K(ψ)(2)
13 Basis Basis of ψ at y: B(ψ) is the set of maximal intervals contained in K(ψ) K(ψ)(-2) K(ψ)(-1) K(ψ)(0) K(ψ)(1) K(ψ)(2) B(ψ)(-2) B(ψ)(-1) B(ψ)(0) B(ψ)(1) B(ψ)(2)
14 Canonical Representation ( u) = U{ y M : { ( ) :[, ] ( )( )} 1}, u a b B y = ψ U λ a ψ b K(ψ)(-2) K(ψ)(-1) K(ψ)(0) K(ψ)(1) K(ψ)(2) ψ(-1,-1) = 1
15 Operator Design
16 Optimization problem Design goal is to find a function ψ opt : Fun[W, L] L with minimum error. Error (expected loss) of a function : Er(ψ) = E[l(ψ(X),Y)] Loss function X is a random function Y is a random variable l : L L R +
17 Estimation problem The distribution P(X,Y) is unknown P(X,Y), Er(ψ) and ψ opt should be estimated from realizations of X and Y. For m > m( ε, δ ) examples Pr( Er(ψ) - Er(ψ opt ) < ε) > 1 - δ ε, δ (0,1)
18 The constrained estimation problem Error ψ opt Ψ Sample size
19 Stack filter Spatially translation invariant Spatially locally defined Increasing Commutes with threshold

20 Noise elimination training images
21 test image iteration 1
22 test image iteration 5

23 test image iteration 1
24 test image iteration 5
25 Apertures Spatially translation invariant Spatially locally defined Range translation invariant Range locally defined

26 Deblurring training images
27

28 Resolution Enhancement

29 (0,0) (0,1) Ψ 2 Ψ 0 Ψ 1 Ψ 3
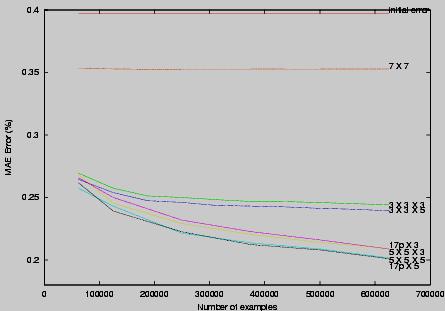
30 Original Aperture: 3x3x21x51 Linear Bilinear

31 Zoom Original Aperture: 3x3x21x51 Linear Bilinear
32 Independent Constraints Constraints Restriction of the operators space K(ψ opt ) Q P(P(W)) Independent Constraint Let be A,B P(W) with A B: h ψ (x)=1 x A & h ψ (x)=0 x B, ψ :K(ψ) Q P(P(W)) K(ψ opt ) {1} B Q A {0,1} Q B P(W) {0} P(P(W)) A
33 Independent Constraints Proposition: if Q is an independent restriction then exist a par of operators (α,β) such that, for any ψ Ψ W K(ψ) Q α ψ β where K(α) = A and K(β) = B All independent constraint is characterized by two operators α and β The pair (α,β) is called Envelope h α {1} h β {1} A {0} A {1} B {0} B {0} P(W) P(W)
34 Noise Edge Detection Ground Image Noise Addition Noisy Image Restoration Filtered Image Edge Detection Edge Detected Direct Edge Detection Edge Detected
35 Restoration a) Machine design of the restoration ψ pac designed by examples b) Human-machine design of the restoration ψ con = (ψ pac β) α α = δ B B ε B B δ B ε B and β = ε B B δ B B ε B δ B α and β are alternating sequential filters with P[ α(s) I β(s) ] 1 B is the 3x3 square Machine design of the restoration Human-Machine design of the restoration 0.28 % 0.13 % 0,3 0,25 0,2 0,15 0,1 0,05 Machine design of the restoration Human design of the restoration 0 Error (%)
36 Noise Edge Detection Edge Detection a) Machine design over noisy images ζ pac designed by examples from noisy images b) Human design after restoration ζ = I d - ε B B is the 3x3 square c) Machine design after restoration ζ pac designed by examples from restored images Machine design over noisy images Human design after restoration Machine design after restoration 0.65 % 0.27 % 0.24 % 0,7 0,6 0,5 0,4 0,3 0,2 0,1 0 Error (%) Machine design over noisy images Human design after restoration Machine design after restoration
37 Noise Edge Detection Machine design over noisy images Error = 0.65% Human design after restoration Error = 0.27% Machine design after restoration Error = 0.24%
38 Multiresolution Constraint x 1 x 2 x 3 x 4 x 5 x 6 x 7 x 8 8 variables z 1 z 2 z 3 z 4 4 variables w 1 w 2 2 variables variables: 2 2 =4 4 variables: 2 4 =16 8 variables: 2 8 =256
39 Multiresolution Constraint D 1 = P(W 1 ) D 0 = P(W 0 ) W 0 z i = p i (x i1,..., x i9 ), z = p(x), p=(p 1,.. p 9 ) Let φ:d 1 {0,1}, it defines the operator Ψ φ on D o by Ψ φ (x) = φ(p(x)) W 1 The operador Ψ φ is constrained by resolution to D 1 Equivalence classes defined by p(x) = p(y) D 0
40 Multiresolution Constraint W 1 p D 2 = P(W 2 ), D 1 = P(W 1 ), D 0 = P(W 0 ) W x D 0, z D 1, v D 2, 0 z i = p i (x i,1,..., x i,9 ), z = p(x), p=(p 1,.. p 81 ) v i = w i (x i,1,..., x i,81 ), v = w(x), w=(w 1,.. w 9 ) W 2 w The equivalence classes defined by p may be different by the ones defined by w.
41
42
43
44 Multiresolution Noise image noise image + noise
45 3x3 window Pyramid Restauration Persisting noise
46
47 Dynamical Systems
48 Finite Lattice Dinamical System
49 Representation The component functions have canonical morphological representations
50 System: input-output
51 Filter For example, processing of motion images.
52 Input-free systems
53 Causal systems
54 Time translation invariant systems
55 Causal, time translation invariant
56 A simulator for chain dynamical systems
57 Simulator Architecture
58 Functions Representation
59 System Description
60 Cell cycle simulation Division Steps Ingredients Control External Signal Inhibition p53 Receptors Excitation Excitation or Inhibition
61
62
63
64
65
66 A model for system identification
67 Model vector of functions S( Φ, Ψ) S opt ( Φ, Ψ) each component function has a basis S
68 System Error
69 Stationary Conditions
70 Component Error
71 Additive Loss Function
72 Independence Condition Under additive loss function optimize the system error is equivalent to optimize the system components error The problem of system identification is reduced to a family of problems of lattice operator design.
73 Identification of Dynamical Systems
74 A Boolean System
75 System simulation
76 System identification: system error
77 System identification: transition error

78 Ideal Est.: 100 training examples Est.: 500 training examples Est.: 1500 training examples
79 Motion Segmentation

80 Mask Predictor result


81 Filtering Color Composition

82 Watershed Color Composition

83 Motion Segmentation

84 Motion Segmentation
85 Conclusion
86 Presented the notion of Lattice Dynamical System Proposed a model for LDS identification Under additive condition, system identification reduces to a family of problems of lattice operator design Some examples were presented This perspective unifies theories such as switching theory, discrete automatic control and reinforcement learning.
MORPHOLOGICAL IMAGE ANALYSIS III
 MORPHOLOGICAL IMAGE ANALYSIS III Secondary inary Morphological Operators A set operator Ψ( ) which is: Increasing; i.e., Ψ( ) Ψ( ) Anti-extensive; i.e., Ψ( ) 1 2 1 2 Idempotent; i.e., ΨΨ ( ( )) = Ψ( )
MORPHOLOGICAL IMAGE ANALYSIS III Secondary inary Morphological Operators A set operator Ψ( ) which is: Increasing; i.e., Ψ( ) Ψ( ) Anti-extensive; i.e., Ψ( ) 1 2 1 2 Idempotent; i.e., ΨΨ ( ( )) = Ψ( )
Chapter III: Opening, Closing
 Chapter III: Opening, Closing Opening and Closing by adjunction Algebraic Opening and Closing Top-Hat Transformation Granulometry J. Serra Ecole des Mines de Paris ( 2000 ) Course on Math. Morphology III.
Chapter III: Opening, Closing Opening and Closing by adjunction Algebraic Opening and Closing Top-Hat Transformation Granulometry J. Serra Ecole des Mines de Paris ( 2000 ) Course on Math. Morphology III.
Feature Selection based on the Local Lift Dependence Scale
 Feature Selection based on the Local Lift Dependence Scale Diego Marcondes Adilson Simonis Junior Barrera arxiv:1711.04181v2 [stat.co] 15 Nov 2017 Abstract This paper uses a classical approach to feature
Feature Selection based on the Local Lift Dependence Scale Diego Marcondes Adilson Simonis Junior Barrera arxiv:1711.04181v2 [stat.co] 15 Nov 2017 Abstract This paper uses a classical approach to feature
Multimedia Databases. Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig
 Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
Multimedia Databases. Previous Lecture. 4.1 Multiresolution Analysis. 4 Shape-based Features. 4.1 Multiresolution Analysis
 Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Linear Dynamical Systems (Kalman filter)
") Linear Dynamical Systems (Kalman filter) (a) Overview of HMMs (b) From HMMs to Linear Dynamical Systems (LDS) 1 Markov Chains with Discrete Random Variables x 1 x 2 x 3 x T Let s assume we have discrete
Linear Dynamical Systems (Kalman filter) (a) Overview of HMMs (b) From HMMs to Linear Dynamical Systems (LDS) 1 Markov Chains with Discrete Random Variables x 1 x 2 x 3 x T Let s assume we have discrete
Multimedia Databases. 4 Shape-based Features. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis
 4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
Chapter I : Basic Notions
 Chapter I : Basic Notions - Image Processing - Lattices - Residues - Measurements J. Serra Ecole des Mines de Paris ( 2000 ) Course on Math. Morphology I. 1 Image Processing (I) => Image processing may
Chapter I : Basic Notions - Image Processing - Lattices - Residues - Measurements J. Serra Ecole des Mines de Paris ( 2000 ) Course on Math. Morphology I. 1 Image Processing (I) => Image processing may
Chapter VI. Set Connection and Numerical Functions
 Chapter VI Set Connection and Numerical Functions Concepts : -> Extension to functions -> Connected operators -> Numerical Geodesy -> Leveling and self-duality Applications : -> Extrema analysis -> Contour
Chapter VI Set Connection and Numerical Functions Concepts : -> Extension to functions -> Connected operators -> Numerical Geodesy -> Leveling and self-duality Applications : -> Extrema analysis -> Contour
CHARACTERIZATION OF LINEAR AND MORPHOLOGICAL OPERATORS. Gerald Jean Francis Banon
 OF LINAR AND MORPHOLOGICAL OPRATORS Gerald Jean Francis Banon Instituto Nacional de Pesquisas spaciais INP Divisão de Processamento de Imagens DPI CP 515 12 21 97, São José dos Campos, SP, Brazil São José
OF LINAR AND MORPHOLOGICAL OPRATORS Gerald Jean Francis Banon Instituto Nacional de Pesquisas spaciais INP Divisão de Processamento de Imagens DPI CP 515 12 21 97, São José dos Campos, SP, Brazil São José
Undirected Graphical Models
 Outline Hong Chang Institute of Computing Technology, Chinese Academy of Sciences Machine Learning Methods (Fall 2012) Outline Outline I 1 Introduction 2 Properties Properties 3 Generative vs. Conditional
Outline Hong Chang Institute of Computing Technology, Chinese Academy of Sciences Machine Learning Methods (Fall 2012) Outline Outline I 1 Introduction 2 Properties Properties 3 Generative vs. Conditional
PILCO: A Model-Based and Data-Efficient Approach to Policy Search
 PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
On the Convergence of the Concave-Convex Procedure
 On the Convergence of the Concave-Convex Procedure Bharath K. Sriperumbudur and Gert R. G. Lanckriet UC San Diego OPT 2009 Outline Difference of convex functions (d.c.) program Applications in machine
On the Convergence of the Concave-Convex Procedure Bharath K. Sriperumbudur and Gert R. G. Lanckriet UC San Diego OPT 2009 Outline Difference of convex functions (d.c.) program Applications in machine
Probabilistic Graphical Models Lecture Notes Fall 2009
 Probabilistic Graphical Models Lecture Notes Fall 2009 October 28, 2009 Byoung-Tak Zhang School of omputer Science and Engineering & ognitive Science, Brain Science, and Bioinformatics Seoul National University
Probabilistic Graphical Models Lecture Notes Fall 2009 October 28, 2009 Byoung-Tak Zhang School of omputer Science and Engineering & ognitive Science, Brain Science, and Bioinformatics Seoul National University
Part I : Bases. Part I : Bases
 Indian Statistical Institute System Science and Informatics Unit Bengalore, India Bengalore, 19-22 October 2010 ESIEE University of Paris-Est France Part I : Bases - ordering and lattices - erosion and
Indian Statistical Institute System Science and Informatics Unit Bengalore, India Bengalore, 19-22 October 2010 ESIEE University of Paris-Est France Part I : Bases - ordering and lattices - erosion and
Undirected Graphical Models: Markov Random Fields
 Undirected Graphical Models: Markov Random Fields 40-956 Advanced Topics in AI: Probabilistic Graphical Models Sharif University of Technology Soleymani Spring 2015 Markov Random Field Structure: undirected
Undirected Graphical Models: Markov Random Fields 40-956 Advanced Topics in AI: Probabilistic Graphical Models Sharif University of Technology Soleymani Spring 2015 Markov Random Field Structure: undirected
Bayesian Networks Inference with Probabilistic Graphical Models
 4190.408 2016-Spring Bayesian Networks Inference with Probabilistic Graphical Models Byoung-Tak Zhang intelligence Lab Seoul National University 4190.408 Artificial (2016-Spring) 1 Machine Learning? Learning
4190.408 2016-Spring Bayesian Networks Inference with Probabilistic Graphical Models Byoung-Tak Zhang intelligence Lab Seoul National University 4190.408 Artificial (2016-Spring) 1 Machine Learning? Learning
Part II : Connection
 Indian Statistical Institute System Science and Informatics Unit Bengalore, India Bengalore, 19-22 October 2010 ESIEE University of Paris-Est France Part II : Connection - Set case - Function case Jean
Indian Statistical Institute System Science and Informatics Unit Bengalore, India Bengalore, 19-22 October 2010 ESIEE University of Paris-Est France Part II : Connection - Set case - Function case Jean
Dynamical Modeling in Biology: a semiotic perspective. Junior Barrera BIOINFO-USP
 Dynamical Modeling in Biology: a semiotic perspective Junior Barrera BIOINFO-USP Layout Introduction Dynamical Systems System Families System Identification Genetic networks design Cell Cycle Modeling
Dynamical Modeling in Biology: a semiotic perspective Junior Barrera BIOINFO-USP Layout Introduction Dynamical Systems System Families System Identification Genetic networks design Cell Cycle Modeling
Logistic Regression: Online, Lazy, Kernelized, Sequential, etc.
 Logistic Regression: Online, Lazy, Kernelized, Sequential, etc. Harsha Veeramachaneni Thomson Reuter Research and Development April 1, 2010 Harsha Veeramachaneni (TR R&D) Logistic Regression April 1, 2010
Logistic Regression: Online, Lazy, Kernelized, Sequential, etc. Harsha Veeramachaneni Thomson Reuter Research and Development April 1, 2010 Harsha Veeramachaneni (TR R&D) Logistic Regression April 1, 2010
TTIC An Introduction to the Theory of Machine Learning. Learning from noisy data, intro to SQ model
 TTIC 325 An Introduction to the Theory of Machine Learning Learning from noisy data, intro to SQ model Avrim Blum 4/25/8 Learning when there is no perfect predictor Hoeffding/Chernoff bounds: minimizing
TTIC 325 An Introduction to the Theory of Machine Learning Learning from noisy data, intro to SQ model Avrim Blum 4/25/8 Learning when there is no perfect predictor Hoeffding/Chernoff bounds: minimizing
Learning with Noisy Labels. Kate Niehaus Reading group 11-Feb-2014
 Learning with Noisy Labels Kate Niehaus Reading group 11-Feb-2014 Outline Motivations Generative model approach: Lawrence, N. & Scho lkopf, B. Estimating a Kernel Fisher Discriminant in the Presence of
Learning with Noisy Labels Kate Niehaus Reading group 11-Feb-2014 Outline Motivations Generative model approach: Lawrence, N. & Scho lkopf, B. Estimating a Kernel Fisher Discriminant in the Presence of
The Origin of Deep Learning. Lili Mou Jan, 2015
 The Origin of Deep Learning Lili Mou Jan, 2015 Acknowledgment Most of the materials come from G. E. Hinton s online course. Outline Introduction Preliminary Boltzmann Machines and RBMs Deep Belief Nets
The Origin of Deep Learning Lili Mou Jan, 2015 Acknowledgment Most of the materials come from G. E. Hinton s online course. Outline Introduction Preliminary Boltzmann Machines and RBMs Deep Belief Nets
Course 495: Advanced Statistical Machine Learning/Pattern Recognition
 Course 495: Advanced Statistical Machine Learning/Pattern Recognition Lecturer: Stefanos Zafeiriou Goal (Lectures): To present discrete and continuous valued probabilistic linear dynamical systems (HMMs
Course 495: Advanced Statistical Machine Learning/Pattern Recognition Lecturer: Stefanos Zafeiriou Goal (Lectures): To present discrete and continuous valued probabilistic linear dynamical systems (HMMs
Auxiliary Particle Methods
 Auxiliary Particle Methods Perspectives & Applications Adam M. Johansen 1 adam.johansen@bristol.ac.uk Oxford University Man Institute 29th May 2008 1 Collaborators include: Arnaud Doucet, Nick Whiteley
Auxiliary Particle Methods Perspectives & Applications Adam M. Johansen 1 adam.johansen@bristol.ac.uk Oxford University Man Institute 29th May 2008 1 Collaborators include: Arnaud Doucet, Nick Whiteley
Linear Dynamical Systems
 Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
PAC-learning, VC Dimension and Margin-based Bounds
 More details: General: http://www.learning-with-kernels.org/ Example of more complex bounds: http://www.research.ibm.com/people/t/tzhang/papers/jmlr02_cover.ps.gz PAC-learning, VC Dimension and Margin-based
More details: General: http://www.learning-with-kernels.org/ Example of more complex bounds: http://www.research.ibm.com/people/t/tzhang/papers/jmlr02_cover.ps.gz PAC-learning, VC Dimension and Margin-based
Pure Patterns and Ordinal Numbers
 Pure Patterns and Ordinal Numbers Gunnar Wilken Okinawa Institute of Science and Technology Graduate University Japan Sets and Computations Institute of the Mathematical Sciences National University of
Pure Patterns and Ordinal Numbers Gunnar Wilken Okinawa Institute of Science and Technology Graduate University Japan Sets and Computations Institute of the Mathematical Sciences National University of
Multiresolution Analysis
 Multiresolution Analysis DS-GA 1013 / MATH-GA 2824 Optimization-based Data Analysis http://www.cims.nyu.edu/~cfgranda/pages/obda_fall17/index.html Carlos Fernandez-Granda Frames Short-time Fourier transform
Multiresolution Analysis DS-GA 1013 / MATH-GA 2824 Optimization-based Data Analysis http://www.cims.nyu.edu/~cfgranda/pages/obda_fall17/index.html Carlos Fernandez-Granda Frames Short-time Fourier transform
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
Mathematical Morphology and Distance Transforms
 Mathematical Morphology and Distance Transforms Vladimir Curic Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University About the teacher PhD student at CBA Background in
Mathematical Morphology and Distance Transforms Vladimir Curic Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University About the teacher PhD student at CBA Background in
Sparse linear models
 Sparse linear models Optimization-Based Data Analysis http://www.cims.nyu.edu/~cfgranda/pages/obda_spring16 Carlos Fernandez-Granda 2/22/2016 Introduction Linear transforms Frequency representation Short-time
Sparse linear models Optimization-Based Data Analysis http://www.cims.nyu.edu/~cfgranda/pages/obda_spring16 Carlos Fernandez-Granda 2/22/2016 Introduction Linear transforms Frequency representation Short-time
CS 173 Lecture 2: Propositional Logic
 CS 173 Lecture 2: Propositional Logic José Meseguer University of Illinois at Urbana-Champaign 1 Propositional Formulas A proposition is a statement that is either true, T or false, F. A proposition usually
CS 173 Lecture 2: Propositional Logic José Meseguer University of Illinois at Urbana-Champaign 1 Propositional Formulas A proposition is a statement that is either true, T or false, F. A proposition usually
On Input Design for System Identification
 On Input Design for System Identification Input Design Using Markov Chains CHIARA BRIGHENTI Masters Degree Project Stockholm, Sweden March 2009 XR-EE-RT 2009:002 Abstract When system identification methods
On Input Design for System Identification Input Design Using Markov Chains CHIARA BRIGHENTI Masters Degree Project Stockholm, Sweden March 2009 XR-EE-RT 2009:002 Abstract When system identification methods
Mathematical Morphology
 Mathematical Morphology Isabelle Bloch http://www.tsi.enst.fr/ bloch Ecole Nationale Supérieure des Télécommunications - CNRS UMR 5141 LTCI Paris - France Mathematical Morphology p.1/84 A few references
Mathematical Morphology Isabelle Bloch http://www.tsi.enst.fr/ bloch Ecole Nationale Supérieure des Télécommunications - CNRS UMR 5141 LTCI Paris - France Mathematical Morphology p.1/84 A few references
Probabilistic Graphical Models
 2016 Robert Nowak Probabilistic Graphical Models 1 Introduction We have focused mainly on linear models for signals, in particular the subspace model x = Uθ, where U is a n k matrix and θ R k is a vector
2016 Robert Nowak Probabilistic Graphical Models 1 Introduction We have focused mainly on linear models for signals, in particular the subspace model x = Uθ, where U is a n k matrix and θ R k is a vector
Mathematical Morphology on Hypergraphs: Preliminary Definitions and Results
 Mathematical Morphology on Hypergraphs: Preliminary Definitions and Results Isabelle Bloch, Alain Bretto DGCI 2011 I. Bloch, A. Bretto (Paris, Caen - France) Mathematical Morphology on Hypergraphs DGCI
Mathematical Morphology on Hypergraphs: Preliminary Definitions and Results Isabelle Bloch, Alain Bretto DGCI 2011 I. Bloch, A. Bretto (Paris, Caen - France) Mathematical Morphology on Hypergraphs DGCI
Regional Solution of Constrained LQ Optimal Control
 Regional Solution of Constrained LQ Optimal Control José DeDoná September 2004 Outline 1 Recap on the Solution for N = 2 2 Regional Explicit Solution Comparison with the Maximal Output Admissible Set 3
Regional Solution of Constrained LQ Optimal Control José DeDoná September 2004 Outline 1 Recap on the Solution for N = 2 2 Regional Explicit Solution Comparison with the Maximal Output Admissible Set 3
Towards a Theory of Information Flow in the Finitary Process Soup
 Towards a Theory of in the Finitary Process Department of Computer Science and Complexity Sciences Center University of California at Davis June 1, 2010 Goals Analyze model of evolutionary self-organization
Towards a Theory of in the Finitary Process Department of Computer Science and Complexity Sciences Center University of California at Davis June 1, 2010 Goals Analyze model of evolutionary self-organization
Pattern Recognition and Machine Learning
 Christopher M. Bishop Pattern Recognition and Machine Learning ÖSpri inger Contents Preface Mathematical notation Contents vii xi xiii 1 Introduction 1 1.1 Example: Polynomial Curve Fitting 4 1.2 Probability
Christopher M. Bishop Pattern Recognition and Machine Learning ÖSpri inger Contents Preface Mathematical notation Contents vii xi xiii 1 Introduction 1 1.1 Example: Polynomial Curve Fitting 4 1.2 Probability
ELEC system identification workshop. Subspace methods
 1 / 33 ELEC system identification workshop Subspace methods Ivan Markovsky 2 / 33 Plan 1. Behavioral approach 2. Subspace methods 3. Optimization methods 3 / 33 Outline Exact modeling Algorithms 4 / 33
1 / 33 ELEC system identification workshop Subspace methods Ivan Markovsky 2 / 33 Plan 1. Behavioral approach 2. Subspace methods 3. Optimization methods 3 / 33 Outline Exact modeling Algorithms 4 / 33
The Art of Sequential Optimization via Simulations
 The Art of Sequential Optimization via Simulations Stochastic Systems and Learning Laboratory EE, CS* & ISE* Departments Viterbi School of Engineering University of Southern California (Based on joint
The Art of Sequential Optimization via Simulations Stochastic Systems and Learning Laboratory EE, CS* & ISE* Departments Viterbi School of Engineering University of Southern California (Based on joint
Introduction to Machine Learning (67577) Lecture 3
 Lecture 3") Introduction to Machine Learning (67577) Lecture 3 Shai Shalev-Shwartz School of CS and Engineering, The Hebrew University of Jerusalem General Learning Model and Bias-Complexity tradeoff Shai Shalev-Shwartz
Introduction to Machine Learning (67577) Lecture 3 Shai Shalev-Shwartz School of CS and Engineering, The Hebrew University of Jerusalem General Learning Model and Bias-Complexity tradeoff Shai Shalev-Shwartz
Sparse Approximation and Variable Selection
 Sparse Approximation and Variable Selection Lorenzo Rosasco 9.520 Class 07 February 26, 2007 About this class Goal To introduce the problem of variable selection, discuss its connection to sparse approximation
Sparse Approximation and Variable Selection Lorenzo Rosasco 9.520 Class 07 February 26, 2007 About this class Goal To introduce the problem of variable selection, discuss its connection to sparse approximation
Introduction to Support Vector Machines
 Introduction to Support Vector Machines Hsuan-Tien Lin Learning Systems Group, California Institute of Technology Talk in NTU EE/CS Speech Lab, November 16, 2005 H.-T. Lin (Learning Systems Group) Introduction
Introduction to Support Vector Machines Hsuan-Tien Lin Learning Systems Group, California Institute of Technology Talk in NTU EE/CS Speech Lab, November 16, 2005 H.-T. Lin (Learning Systems Group) Introduction
Gentle Introduction to Infinite Gaussian Mixture Modeling
 Gentle Introduction to Infinite Gaussian Mixture Modeling with an application in neuroscience By Frank Wood Rasmussen, NIPS 1999 Neuroscience Application: Spike Sorting Important in neuroscience and for
Gentle Introduction to Infinite Gaussian Mixture Modeling with an application in neuroscience By Frank Wood Rasmussen, NIPS 1999 Neuroscience Application: Spike Sorting Important in neuroscience and for
Machine Learning 4771
 Machine Learning 4771 Instructor: ony Jebara Kalman Filtering Linear Dynamical Systems and Kalman Filtering Structure from Motion Linear Dynamical Systems Audio: x=pitch y=acoustic waveform Vision: x=object
Machine Learning 4771 Instructor: ony Jebara Kalman Filtering Linear Dynamical Systems and Kalman Filtering Structure from Motion Linear Dynamical Systems Audio: x=pitch y=acoustic waveform Vision: x=object
The sample complexity of agnostic learning with deterministic labels
 The sample complexity of agnostic learning with deterministic labels Shai Ben-David Cheriton School of Computer Science University of Waterloo Waterloo, ON, N2L 3G CANADA shai@uwaterloo.ca Ruth Urner College
The sample complexity of agnostic learning with deterministic labels Shai Ben-David Cheriton School of Computer Science University of Waterloo Waterloo, ON, N2L 3G CANADA shai@uwaterloo.ca Ruth Urner College
Chapter VIII : Thinnings
 Chapter VIII : Thinnings Hit-or-Miss Thinning thickening Homotopy Homotopy and Connectivity Homotopic Thinnings and Thickenings J. Serra Ecole des Mines de Paris ( 2000 ) Course on Math. Morphology VIII.
Chapter VIII : Thinnings Hit-or-Miss Thinning thickening Homotopy Homotopy and Connectivity Homotopic Thinnings and Thickenings J. Serra Ecole des Mines de Paris ( 2000 ) Course on Math. Morphology VIII.
CS4495/6495 Introduction to Computer Vision. 8C-L3 Support Vector Machines
 CS4495/6495 Introduction to Computer Vision 8C-L3 Support Vector Machines Discriminative classifiers Discriminative classifiers find a division (surface) in feature space that separates the classes Several
CS4495/6495 Introduction to Computer Vision 8C-L3 Support Vector Machines Discriminative classifiers Discriminative classifiers find a division (surface) in feature space that separates the classes Several
Graphical models for part of speech tagging
 Indian Institute of Technology, Bombay and Research Division, India Research Lab Graphical models for part of speech tagging Different Models for POS tagging HMM Maximum Entropy Markov Models Conditional
Indian Institute of Technology, Bombay and Research Division, India Research Lab Graphical models for part of speech tagging Different Models for POS tagging HMM Maximum Entropy Markov Models Conditional
Adversarial Surrogate Losses for Ordinal Regression
 Adversarial Surrogate Losses for Ordinal Regression Rizal Fathony, Mohammad Bashiri, Brian D. Ziebart (Illinois at Chicago) August 22, 2018 Presented by: Gregory P. Spell Outline 1 Introduction Ordinal
Adversarial Surrogate Losses for Ordinal Regression Rizal Fathony, Mohammad Bashiri, Brian D. Ziebart (Illinois at Chicago) August 22, 2018 Presented by: Gregory P. Spell Outline 1 Introduction Ordinal
A Generative Perspective on MRFs in Low-Level Vision Supplemental Material
 A Generative Perspective on MRFs in Low-Level Vision Supplemental Material Uwe Schmidt Qi Gao Stefan Roth Department of Computer Science, TU Darmstadt 1. Derivations 1.1. Sampling the Prior We first rewrite
A Generative Perspective on MRFs in Low-Level Vision Supplemental Material Uwe Schmidt Qi Gao Stefan Roth Department of Computer Science, TU Darmstadt 1. Derivations 1.1. Sampling the Prior We first rewrite
Introduction to Machine Learning
 Introduction to Machine Learning Thomas G. Dietterich tgd@eecs.oregonstate.edu 1 Outline What is Machine Learning? Introduction to Supervised Learning: Linear Methods Overfitting, Regularization, and the
Introduction to Machine Learning Thomas G. Dietterich tgd@eecs.oregonstate.edu 1 Outline What is Machine Learning? Introduction to Supervised Learning: Linear Methods Overfitting, Regularization, and the
Conditional Independence and Factorization
 Conditional Independence and Factorization Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr
Conditional Independence and Factorization Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr
Topological dynamics: basic notions and examples
 CHAPTER 9 Topological dynamics: basic notions and examples We introduce the notion of a dynamical system, over a given semigroup S. This is a (compact Hausdorff) topological space on which the semigroup
CHAPTER 9 Topological dynamics: basic notions and examples We introduce the notion of a dynamical system, over a given semigroup S. This is a (compact Hausdorff) topological space on which the semigroup
Kernel Methods and Support Vector Machines
 Kernel Methods and Support Vector Machines Oliver Schulte - CMPT 726 Bishop PRML Ch. 6 Support Vector Machines Defining Characteristics Like logistic regression, good for continuous input features, discrete
Kernel Methods and Support Vector Machines Oliver Schulte - CMPT 726 Bishop PRML Ch. 6 Support Vector Machines Defining Characteristics Like logistic regression, good for continuous input features, discrete
Learning from Corrupted Binary Labels via Class-Probability Estimation
 Learning from Corrupted Binary Labels via Class-Probability Estimation Aditya Krishna Menon Brendan van Rooyen Cheng Soon Ong Robert C. Williamson xxx National ICT Australia and The Australian National
Learning from Corrupted Binary Labels via Class-Probability Estimation Aditya Krishna Menon Brendan van Rooyen Cheng Soon Ong Robert C. Williamson xxx National ICT Australia and The Australian National
MACHINE LEARNING 2 UGM,HMMS Lecture 7
 LOREM I P S U M Royal Institute of Technology MACHINE LEARNING 2 UGM,HMMS Lecture 7 THIS LECTURE DGM semantics UGM De-noising HMMs Applications (interesting probabilities) DP for generation probability
LOREM I P S U M Royal Institute of Technology MACHINE LEARNING 2 UGM,HMMS Lecture 7 THIS LECTURE DGM semantics UGM De-noising HMMs Applications (interesting probabilities) DP for generation probability
Map automatic scale reduction by means of mathematical morphology
 Map automatic scale reduction by means of mathematical morphology Luiz Alberto Vieira Dias 1 Júlio Cesar Lima d Alge 2 Fernando Augusto Mitsuo Ii 2 Sílvia Shizue Ii 2 National Institute for Space Research
Map automatic scale reduction by means of mathematical morphology Luiz Alberto Vieira Dias 1 Júlio Cesar Lima d Alge 2 Fernando Augusto Mitsuo Ii 2 Sílvia Shizue Ii 2 National Institute for Space Research
Markov Random Fields
 Markov Random Fields Umamahesh Srinivas ipal Group Meeting February 25, 2011 Outline 1 Basic graph-theoretic concepts 2 Markov chain 3 Markov random field (MRF) 4 Gauss-Markov random field (GMRF), and
Markov Random Fields Umamahesh Srinivas ipal Group Meeting February 25, 2011 Outline 1 Basic graph-theoretic concepts 2 Markov chain 3 Markov random field (MRF) 4 Gauss-Markov random field (GMRF), and
Introduction to Machine Learning
 Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Machine Learning. Support Vector Machines. Manfred Huber
 Machine Learning Support Vector Machines Manfred Huber 2015 1 Support Vector Machines Both logistic regression and linear discriminant analysis learn a linear discriminant function to separate the data
Machine Learning Support Vector Machines Manfred Huber 2015 1 Support Vector Machines Both logistic regression and linear discriminant analysis learn a linear discriminant function to separate the data
Multiple Kernel Learning
 CS 678A Course Project Vivek Gupta, 1 Anurendra Kumar 2 Sup: Prof. Harish Karnick 1 1 Department of Computer Science and Engineering 2 Department of Electrical Engineering Indian Institute of Technology,
CS 678A Course Project Vivek Gupta, 1 Anurendra Kumar 2 Sup: Prof. Harish Karnick 1 1 Department of Computer Science and Engineering 2 Department of Electrical Engineering Indian Institute of Technology,
arxiv: v1 [math.lo] 30 Aug 2018
![arxiv: v1 [math.lo] 30 Aug 2018](/thumbs/84/90989441.jpg "arxiv: v1 [math.lo] 30 Aug 2018") arxiv:1808.10324v1 [math.lo] 30 Aug 2018 Real coextensions as a tool for constructing triangular norms Thomas Vetterlein Department of Knowledge-Based Mathematical Systems Johannes Kepler University Linz
arxiv:1808.10324v1 [math.lo] 30 Aug 2018 Real coextensions as a tool for constructing triangular norms Thomas Vetterlein Department of Knowledge-Based Mathematical Systems Johannes Kepler University Linz
CSC 412 (Lecture 4): Undirected Graphical Models
: Undirected Graphical Models") CSC 412 (Lecture 4): Undirected Graphical Models Raquel Urtasun University of Toronto Feb 2, 2016 R Urtasun (UofT) CSC 412 Feb 2, 2016 1 / 37 Today Undirected Graphical Models: Semantics of the graph:
CSC 412 (Lecture 4): Undirected Graphical Models Raquel Urtasun University of Toronto Feb 2, 2016 R Urtasun (UofT) CSC 412 Feb 2, 2016 1 / 37 Today Undirected Graphical Models: Semantics of the graph:
NONLINEAR CLASSIFICATION AND REGRESSION. J. Elder CSE 4404/5327 Introduction to Machine Learning and Pattern Recognition
 NONLINEAR CLASSIFICATION AND REGRESSION Nonlinear Classification and Regression: Outline 2 Multi-Layer Perceptrons The Back-Propagation Learning Algorithm Generalized Linear Models Radial Basis Function
NONLINEAR CLASSIFICATION AND REGRESSION Nonlinear Classification and Regression: Outline 2 Multi-Layer Perceptrons The Back-Propagation Learning Algorithm Generalized Linear Models Radial Basis Function
Directed and Undirected Graphical Models
 Directed and Undirected Davide Bacciu Dipartimento di Informatica Università di Pisa bacciu@di.unipi.it Machine Learning: Neural Networks and Advanced Models (AA2) Last Lecture Refresher Lecture Plan Directed
Directed and Undirected Davide Bacciu Dipartimento di Informatica Università di Pisa bacciu@di.unipi.it Machine Learning: Neural Networks and Advanced Models (AA2) Last Lecture Refresher Lecture Plan Directed
BOOLEAN ALGEBRA INTRODUCTION SUBSETS
 BOOLEAN ALGEBRA M. Ragheb 1/294/2018 INTRODUCTION Modern algebra is centered around the concept of an algebraic system: A, consisting of a set of elements: ai, i=1, 2,, which are combined by a set of operations
BOOLEAN ALGEBRA M. Ragheb 1/294/2018 INTRODUCTION Modern algebra is centered around the concept of an algebraic system: A, consisting of a set of elements: ai, i=1, 2,, which are combined by a set of operations
Morphology Gonzalez and Woods, Chapter 9 Except sections 9.5.7, 9.5.8, and Repetition of binary dilatation, erosion, opening, closing
 09.11.2011 Anne Solberg Morphology Gonzalez and Woods, Chapter 9 Except sections 9.5.7, 9.5.8, 9.5.9 and 9.6.4 Repetition of binary dilatation, erosion, opening, closing Binary region processing: connected
09.11.2011 Anne Solberg Morphology Gonzalez and Woods, Chapter 9 Except sections 9.5.7, 9.5.8, 9.5.9 and 9.6.4 Repetition of binary dilatation, erosion, opening, closing Binary region processing: connected
Machine Learning 2nd Edition
 INTRODUCTION TO Lecture Slides for Machine Learning 2nd Edition ETHEM ALPAYDIN, modified by Leonardo Bobadilla and some parts from http://www.cs.tau.ac.il/~apartzin/machinelearning/ The MIT Press, 2010
INTRODUCTION TO Lecture Slides for Machine Learning 2nd Edition ETHEM ALPAYDIN, modified by Leonardo Bobadilla and some parts from http://www.cs.tau.ac.il/~apartzin/machinelearning/ The MIT Press, 2010
Algebraic Geometry: Limits and Colimits
 Algebraic Geometry: Limits and Coits Limits Definition.. Let I be a small category, C be any category, and F : I C be a functor. If for each object i I and morphism m ij Mor I (i, j) there is an associated
Algebraic Geometry: Limits and Coits Limits Definition.. Let I be a small category, C be any category, and F : I C be a functor. If for each object i I and morphism m ij Mor I (i, j) there is an associated
Poisson line processes. C. Lantuéjoul MinesParisTech
 Poisson line processes C. Lantuéjoul MinesParisTech christian.lantuejoul@mines-paristech.fr Bertrand paradox A problem of geometrical probability A line is thrown at random on a circle. What is the probability
Poisson line processes C. Lantuéjoul MinesParisTech christian.lantuejoul@mines-paristech.fr Bertrand paradox A problem of geometrical probability A line is thrown at random on a circle. What is the probability
The Poisson storm process Extremal coefficients and simulation
 The Poisson storm process Extremal coefficients and simulation C. Lantuéjoul 1, J.N. Bacro 2 and L. Bel 3 1 MinesParisTech 2 Université de Montpellier II 3 AgroParisTech 1 Storm process Introduced by Smith
The Poisson storm process Extremal coefficients and simulation C. Lantuéjoul 1, J.N. Bacro 2 and L. Bel 3 1 MinesParisTech 2 Université de Montpellier II 3 AgroParisTech 1 Storm process Introduced by Smith
Chapter IV : Morphological Filtering
 Chapter IV : Morphological Filtering Serial composition -> Products θψ, θψθ -> Alternating sequential filters Parallel composition -> Morphological centers -> Contrast enhancement J. Serra Ecole des Mines
Chapter IV : Morphological Filtering Serial composition -> Products θψ, θψθ -> Alternating sequential filters Parallel composition -> Morphological centers -> Contrast enhancement J. Serra Ecole des Mines
Part I. C. M. Bishop PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 8: GRAPHICAL MODELS
 Part I C. M. Bishop PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 8: GRAPHICAL MODELS Probabilistic Graphical Models Graphical representation of a probabilistic model Each variable corresponds to a
Part I C. M. Bishop PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 8: GRAPHICAL MODELS Probabilistic Graphical Models Graphical representation of a probabilistic model Each variable corresponds to a
A Nonlocal p-laplacian Equation With Variable Exponent For Image Restoration
 A Nonlocal p-laplacian Equation With Variable Exponent For Image Restoration EST Essaouira-Cadi Ayyad University SADIK Khadija Work with : Lamia ZIAD Supervised by : Fahd KARAMI Driss MESKINE Premier congrès
A Nonlocal p-laplacian Equation With Variable Exponent For Image Restoration EST Essaouira-Cadi Ayyad University SADIK Khadija Work with : Lamia ZIAD Supervised by : Fahd KARAMI Driss MESKINE Premier congrès
( nonlinear constraints)
") Wavelet Design & Applications Basic requirements: Admissibility (single constraint) Orthogonality ( nonlinear constraints) Sparse Representation Smooth functions well approx. by Fourier High-frequency
Wavelet Design & Applications Basic requirements: Admissibility (single constraint) Orthogonality ( nonlinear constraints) Sparse Representation Smooth functions well approx. by Fourier High-frequency
4 Matrix product states
 Physics 3b Lecture 5 Caltech, 05//7 4 Matrix product states Matrix product state (MPS) is a highly useful tool in the study of interacting quantum systems in one dimension, both analytically and numerically.
Physics 3b Lecture 5 Caltech, 05//7 4 Matrix product states Matrix product state (MPS) is a highly useful tool in the study of interacting quantum systems in one dimension, both analytically and numerically.
HST.582J/6.555J/16.456J
 Blind Source Separation: PCA & ICA HST.582J/6.555J/16.456J Gari D. Clifford gari [at] mit. edu http://www.mit.edu/~gari G. D. Clifford 2005-2009 What is BSS? Assume an observation (signal) is a linear
Blind Source Separation: PCA & ICA HST.582J/6.555J/16.456J Gari D. Clifford gari [at] mit. edu http://www.mit.edu/~gari G. D. Clifford 2005-2009 What is BSS? Assume an observation (signal) is a linear
The geometry of Gaussian processes and Bayesian optimization. Contal CMLA, ENS Cachan
 The geometry of Gaussian processes and Bayesian optimization. Contal CMLA, ENS Cachan Background: Global Optimization and Gaussian Processes The Geometry of Gaussian Processes and the Chaining Trick Algorithm
The geometry of Gaussian processes and Bayesian optimization. Contal CMLA, ENS Cachan Background: Global Optimization and Gaussian Processes The Geometry of Gaussian Processes and the Chaining Trick Algorithm
Learning Theory. Ingo Steinwart University of Stuttgart. September 4, 2013
 Learning Theory Ingo Steinwart University of Stuttgart September 4, 2013 Ingo Steinwart University of Stuttgart () Learning Theory September 4, 2013 1 / 62 Basics Informal Introduction Informal Description
Learning Theory Ingo Steinwart University of Stuttgart September 4, 2013 Ingo Steinwart University of Stuttgart () Learning Theory September 4, 2013 1 / 62 Basics Informal Introduction Informal Description
CS 179: LECTURE 16 MODEL COMPLEXITY, REGULARIZATION, AND CONVOLUTIONAL NETS
 CS 179: LECTURE 16 MODEL COMPLEXITY, REGULARIZATION, AND CONVOLUTIONAL NETS LAST TIME Intro to cudnn Deep neural nets using cublas and cudnn TODAY Building a better model for image classification Overfitting
CS 179: LECTURE 16 MODEL COMPLEXITY, REGULARIZATION, AND CONVOLUTIONAL NETS LAST TIME Intro to cudnn Deep neural nets using cublas and cudnn TODAY Building a better model for image classification Overfitting
Time Series Classification
 Distance Measures Classifiers DTW vs. ED Further Work Questions August 31, 2017 Distance Measures Classifiers DTW vs. ED Further Work Questions Outline 1 2 Distance Measures 3 Classifiers 4 DTW vs. ED
Distance Measures Classifiers DTW vs. ED Further Work Questions August 31, 2017 Distance Measures Classifiers DTW vs. ED Further Work Questions Outline 1 2 Distance Measures 3 Classifiers 4 DTW vs. ED
Optimal input design for nonlinear dynamical systems: a graph-theory approach
 Optimal input design for nonlinear dynamical systems: a graph-theory approach Patricio E. Valenzuela Department of Automatic Control and ACCESS Linnaeus Centre KTH Royal Institute of Technology, Stockholm,
Optimal input design for nonlinear dynamical systems: a graph-theory approach Patricio E. Valenzuela Department of Automatic Control and ACCESS Linnaeus Centre KTH Royal Institute of Technology, Stockholm,
Computational and Statistical Learning Theory
 Computational and Statistical Learning Theory TTIC 31120 Prof. Nati Srebro Lecture 6: Computational Complexity of Learning Proper vs Improper Learning Learning Using FIND-CONS For any family of hypothesis
Computational and Statistical Learning Theory TTIC 31120 Prof. Nati Srebro Lecture 6: Computational Complexity of Learning Proper vs Improper Learning Learning Using FIND-CONS For any family of hypothesis
ECE661: Homework 6. Ahmed Mohamed October 28, 2014
 ECE661: Homework 6 Ahmed Mohamed (akaseb@purdue.edu) October 28, 2014 1 Otsu Segmentation Algorithm Given a grayscale image, my implementation of the Otsu algorithm follows these steps: 1. Construct a
ECE661: Homework 6 Ahmed Mohamed (akaseb@purdue.edu) October 28, 2014 1 Otsu Segmentation Algorithm Given a grayscale image, my implementation of the Otsu algorithm follows these steps: 1. Construct a
Bisimulation for Neighbourhood Structures
 Bisimulation for Neighbourhood Structures Helle Hvid Hansen 1,2 Clemens Kupke 2 Eric Pacuit 3 1 Vrije Universiteit Amsterdam (VUA) 2 Centrum voor Wiskunde en Informatica (CWI) 3 Universiteit van Amsterdam
Bisimulation for Neighbourhood Structures Helle Hvid Hansen 1,2 Clemens Kupke 2 Eric Pacuit 3 1 Vrije Universiteit Amsterdam (VUA) 2 Centrum voor Wiskunde en Informatica (CWI) 3 Universiteit van Amsterdam
Chapter 7 Wavelets and Multiresolution Processing
 Chapter 7 Wavelets and Multiresolution Processing Background Multiresolution Expansions Wavelet Transforms in One Dimension Wavelet Transforms in Two Dimensions Image Pyramids Subband Coding The Haar
Chapter 7 Wavelets and Multiresolution Processing Background Multiresolution Expansions Wavelet Transforms in One Dimension Wavelet Transforms in Two Dimensions Image Pyramids Subband Coding The Haar
Symmetry insights for design of supercomputer network topologies: roots and weights lattices.
 Symmetry insights for design of supercomputer network topologies: roots and weights lattices. School of Arts, Sciences and Humanities - University of São Paulo May 26, 2014 Applications require further
Symmetry insights for design of supercomputer network topologies: roots and weights lattices. School of Arts, Sciences and Humanities - University of São Paulo May 26, 2014 Applications require further
Prof. Dr. Lars Schmidt-Thieme, L. B. Marinho, K. Buza Information Systems and Machine Learning Lab (ISMLL), University of Hildesheim, Germany, Course
, University of Hildesheim, Germany, Course") Course on Bayesian Networks, winter term 2007 0/31 Bayesian Networks Bayesian Networks I. Bayesian Networks / 1. Probabilistic Independence and Separation in Graphs Prof. Dr. Lars Schmidt-Thieme, L. B.
Course on Bayesian Networks, winter term 2007 0/31 Bayesian Networks Bayesian Networks I. Bayesian Networks / 1. Probabilistic Independence and Separation in Graphs Prof. Dr. Lars Schmidt-Thieme, L. B.
Generative Models for Sentences
 Generative Models for Sentences Amjad Almahairi PhD student August 16 th 2014 Outline 1. Motivation Language modelling Full Sentence Embeddings 2. Approach Bayesian Networks Variational Autoencoders (VAE)
Generative Models for Sentences Amjad Almahairi PhD student August 16 th 2014 Outline 1. Motivation Language modelling Full Sentence Embeddings 2. Approach Bayesian Networks Variational Autoencoders (VAE)
ECE598: Information-theoretic methods in high-dimensional statistics Spring 2016
 ECE598: Information-theoretic methods in high-dimensional statistics Spring 06 Lecture : Mutual Information Method Lecturer: Yihong Wu Scribe: Jaeho Lee, Mar, 06 Ed. Mar 9 Quick review: Assouad s lemma
ECE598: Information-theoretic methods in high-dimensional statistics Spring 06 Lecture : Mutual Information Method Lecturer: Yihong Wu Scribe: Jaeho Lee, Mar, 06 Ed. Mar 9 Quick review: Assouad s lemma
Data Retrieval and Noise Reduction by Fuzzy Associative Memories
 Data Retrieval and Noise Reduction by Fuzzy Associative Memories Irina Perfilieva, Marek Vajgl University of Ostrava, Institute for Research and Applications of Fuzzy Modeling, Centre of Excellence IT4Innovations,
Data Retrieval and Noise Reduction by Fuzzy Associative Memories Irina Perfilieva, Marek Vajgl University of Ostrava, Institute for Research and Applications of Fuzzy Modeling, Centre of Excellence IT4Innovations,
Boolean Algebras, Boolean Rings and Stone s Representation Theorem
 Boolean Algebras, Boolean Rings and Stone s Representation Theorem Hongtaek Jung December 27, 2017 Abstract This is a part of a supplementary note for a Logic and Set Theory course. The main goal is to
Boolean Algebras, Boolean Rings and Stone s Representation Theorem Hongtaek Jung December 27, 2017 Abstract This is a part of a supplementary note for a Logic and Set Theory course. The main goal is to
Large subsets of semigroups
 CHAPTER 8 Large subsets of semigroups In the van der Waerden theorem 7.5, we are given a finite colouring ω = A 1 A r of the commutative semigroup (ω, +); the remark 7.7(b) states that (at least) one of
CHAPTER 8 Large subsets of semigroups In the van der Waerden theorem 7.5, we are given a finite colouring ω = A 1 A r of the commutative semigroup (ω, +); the remark 7.7(b) states that (at least) one of
Gaussian discriminant analysis Naive Bayes
 DM825 Introduction to Machine Learning Lecture 7 Gaussian discriminant analysis Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark Outline 1. is 2. Multi-variate
DM825 Introduction to Machine Learning Lecture 7 Gaussian discriminant analysis Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark Outline 1. is 2. Multi-variate
Gaussian with mean ( µ ) and standard deviation ( σ)
 and standard deviation ( σ)") Slide from Pieter Abbeel Gaussian with mean ( µ ) and standard deviation ( σ) 10/6/16 CSE-571: Robotics X ~ N( µ, σ ) Y ~ N( aµ + b, a σ ) Y = ax + b + + + + 1 1 1 1 1 1 1 1 1 1, ~ ) ( ) ( ), ( ~ ), (
Slide from Pieter Abbeel Gaussian with mean ( µ ) and standard deviation ( σ) 10/6/16 CSE-571: Robotics X ~ N( µ, σ ) Y ~ N( aµ + b, a σ ) Y = ax + b + + + + 1 1 1 1 1 1 1 1 1 1, ~ ) ( ) ( ), ( ~ ), (
Mask Connectivity by Viscous Closings: Linking Merging Galaxies without Merging Double Stars
 Mask Connectivity by Viscous Closings: Linking Merging Galaxies without Merging Double Stars Ugo Moschini 1, Scott C. Trager 2 and Michael H. F. Wilkinson 1 1 Johann Bernoulli Institute, University of
Mask Connectivity by Viscous Closings: Linking Merging Galaxies without Merging Double Stars Ugo Moschini 1, Scott C. Trager 2 and Michael H. F. Wilkinson 1 1 Johann Bernoulli Institute, University of
From perceptrons to word embeddings. Simon Šuster University of Groningen
 From perceptrons to word embeddings Simon Šuster University of Groningen Outline A basic computational unit Weighting some input to produce an output: classification Perceptron Classify tweets Written
From perceptrons to word embeddings Simon Šuster University of Groningen Outline A basic computational unit Weighting some input to produce an output: classification Perceptron Classify tweets Written