CS 468 Lecture 16: Isometry Invariance and Spectral Techniques
|
|
|
- Owen Pierce
- 6 years ago
- Views:
Transcription
1 CS 468 Lecture 16: Isometry Invarance and Spectral Technques Justn Solomon Scrbe: Evan Gawlk Introducton. In geometry processng, t s often desrable to characterze the shape of an object n a manner that s nvarant to sometres deformatons of the object that nvolve bendng wthout stretchng, thereby leavng ntrnsc dstances undsturbed. Examples where such characterzatons are useful nclude segmentaton, symmetry detecton, recognton, retreval, feature extracton, and algnment. Ths lecture ntroduces the mathematcal defnton of an sometry and descrbes several shape descrptors that are used to characterze geometres n an sometry-nvarant manner. Isometry. Let (X, d 1 ) and (Y, d 2 ) be metrc spaces. A map f : X Y s a global sometry f d 1 (x, y) = d 2 (f(x), f(y)) for every x X and y Y. A related concept apples to the case n whch X and Y are Remannan manfolds wth metrcs g 1 and g 2, and f s a dffeomorphsm. The map f s sad to be a local sometry f g 1 (v, w) = g 2 (f v, f w) for every par of vector felds v and w on X. Here, f : T X T Y denotes the push-forward. Shape Descrptors. A shape descrptor s an assgnment of a real number of tuple of real numbers h(x) R n to each pont x on a surface S R 3, 1
2 desgned n such a way that the tuple stored at each locaton characterzes the local geometry of the surface and descrbes the pont s role on the surface. We have already seen examples of shape descrptors: the Gaussan curvature K(x) = κ 1 (x)κ 2 (x) and the mean curvature H(x) = κ 1 (x) + κ 2 (x) are two such examples. Several ams should be kept n mnd when desgnng a good shape descrptor. Clearly, h(x) should provde useful nformaton about the pont x. It should be robust aganst nose n the trangulaton and aganst small deformatons, and t should be ntrnsc that s, ndependent of the manner n whch S s embedded n R 3. Fnally, t should be nvarant under rgd motons and other sometres. The Hodge Laplacan = δd + dδ, beng an ntrnsc operator, provdes a useful startng pont for the desgn of many shape descrptors. To ntut ts ntrnsc nature, note, for example, that solutons to the heat equaton u t = u on a surface S are unaltered by sometres. Global Pont Sgnature. An example of a shape descrptor that reles on the Hodge Laplacan s the Global Pont Sgnature (GPS). Ths shape descrptor assgns to each pont x S the sequence of real numbers ( ) GP S(x) = λ 1/2 1 ϕ 1 (x), λ 1/2 2 ϕ 2 (x), λ 1/2 3 ϕ 3 (x),..., where λ are the egenvalues of and ϕ are the correspondng egenfunctons. Beng derved solely from the Laplacan, the GPS s nvarant under sometres of S. Let us also note that the GPS, vewed as a map from S to the space of sequences of real numbers, s njectve, provded the surface S does not selfntersect. Ths follows from the fact the the egenfunctons ϕ 1, ϕ 2,... form a bass for the space of smooth functons on S. Abstractly, one can thnk of the mage of ths map as a surface n nfnte-dmensonal Eucldean space; njectvty mples that ths surface does not self-ntersect whenever S does not self-ntersect. 2
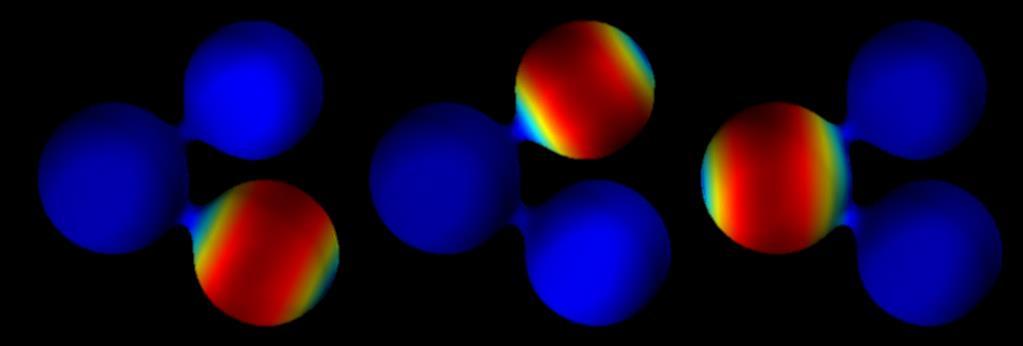
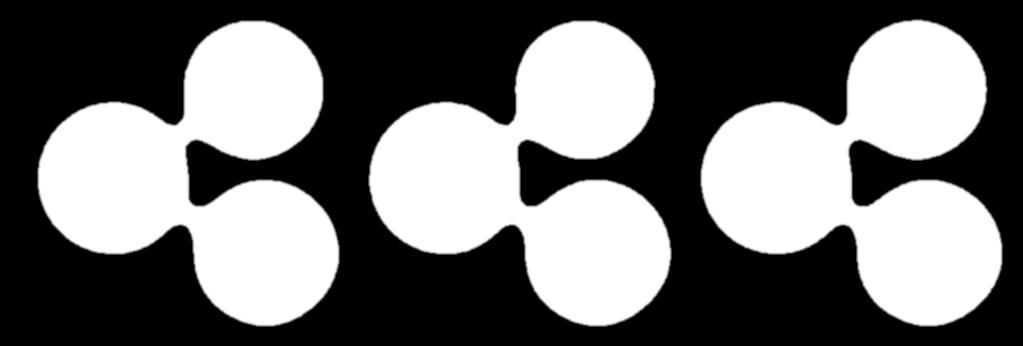
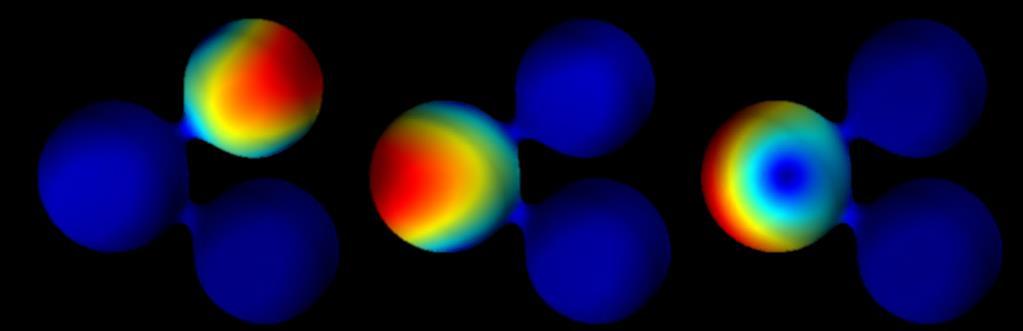
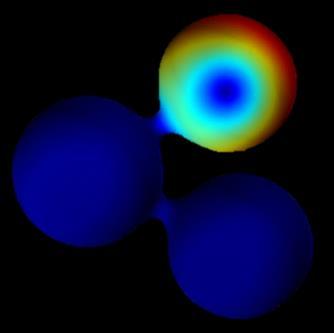
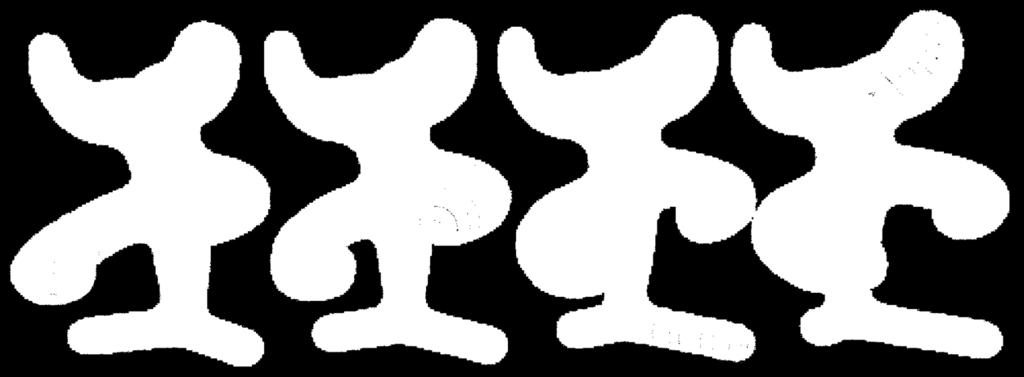
3 The GPS suffers from a few drawbacks. It assumes that the egenvalues of are unque, and can gve rse to abrupt changes n GPS values when a small deformaton of the surface leads to a reorderng of egenvalues. Fnally, t s a nonlocal feature snce the egenfunctons of the Laplacan generally have global support. Heat Kernel Sgnature and Wave Kernel Sgnature. Two other popular shape descrptors that derve from the Laplacan are the Heat Kernel Sgnature (HKS) and Wave Kernel Sgnature (WKS). To defne the HKS, let k t (x, y) denote the fundamental soluton to the heat equaton u t = u on S. That s, k t (x, y) s the value of the soluton to the heat equaton at tme t and poston x S, assumng the ntal condton s gven by a delta functon centered at y S. In terms of the egenfunctons ϕ and egenvalues λ of, k t (x, y) = e λt ϕ (x)ϕ (y). Fxng a tme t, the HKS s then defned as HKS(x) = k t (x, x) = e λ t ϕ (x) 2 In words, the Heat Kernel Sgnature measures the amount of heat left at x after t unts of tme have transpred, assumng the ntal heat dstrbuton was concentrated at x. An example of the HKS at four ponts on a trangulated surface s shown n Fg. 1. For short tmes, the four ponts have nearly dentcal heat kernel sgnatures k t (x, x) snce the local geometry (the tps of the dragon s feet) s roughly the same. At a later tme, the heat kernel sgnatures k t (x, x) capture more global nformaton about the surface s shape and dverge. In ths sense, the HKS s a multscale shape descrptor. The Wave Kernel Sgnature (WKS) s a shape descrptor of a smlar nature, except that t s based upon solutons to the Schrodnger wave equaton u tt = u 3
 = ϕ (x) 2 f 1 (λ ) 2, ϕ (x) 2 f 2 (λ ) 2, ) ϕ (x) 2 f 3 (λ ) 2,.")
4 Fgure 1: Heat kernel sgnature. Upon selectng a famly of ntal energy dstrbutons f E (λ), E = 1, 2,..., the WKS s defned as ( W KS(x) = ϕ (x) 2 f 1 (λ ) 2, ϕ (x) 2 f 2 (λ ) 2, ) ϕ (x) 2 f 3 (λ ) 2,... The entres of ths vector correspond to the long-tme averages of the squared soluton to the Schrodnger wave equaton at poston x, gven the ntal energy dstrbutons f E. The HKS and WKS have smlar advantages and dsadvantages. Both are sometry-nvarant, easy to compute, and do not suffer from the danger of egenvalue swtchng under small deformatons that we observed for the GPS. Repeated egenvalues are stll an ssue, however, and the WKS can sometmes flter out large-scale features that mght be worth retanng. Shape descrptors lke those dscussed above have applcatons n a varety of contexts, ncludng feature extracton, correspondence between surfaces, matchng surfaces, and detectng dscrete symmetres. Contnuous symmetres Much of the machnery developed above s useful for detectng dscrete symmetres, such as symmetres under reflecton about an axs. A related noton s that of a contnuous symmetry e.g., rotatons and translatons that leave the geometry nvarant. A Kllng vector feld s a vector feld V along whch the metrc s nvarant. Informally, dstances between nearby ponts do not change when transported along the flow of the vector feld V. 4
5 0 (s) t (s) +s +t Fgure 2: Famly of curves γ t (s). To determne the condtons under whch a vector feld V qualfes as a Kllng vector feld, let γ 0 be curve on S parametrzed by arclength s, and let γ t (s) denote the locaton of γ 0 (s) after beng transported along the flow of V by t unts of tme, as n Fg. 2. If dstances are preserved, then the parameter s represents arclength along the deformed curve γ t ; hence γ 0(s) = γ t(s) = 1 for every t. Dfferentatng wth respect to tme and usng the symmetry of mxed partals gves 0 = t γ t(s) 1 = γ γ t(s), t(s) t γ t(s) = T (s), t γ t(s) = T (s), s t γ t(s) Now snce V (s) = γ t t(s), we obtan 0 = T (s), s V (s) 5
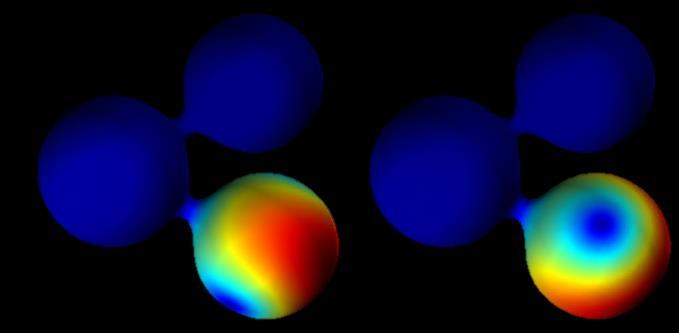
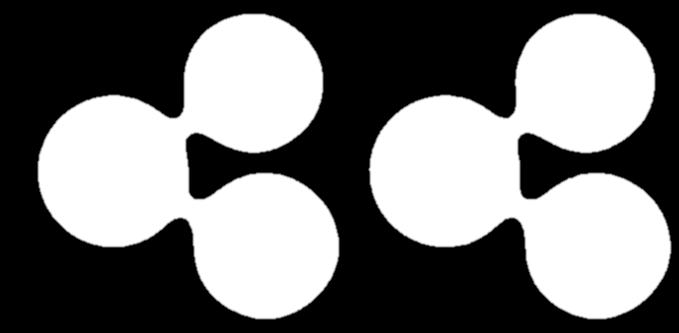
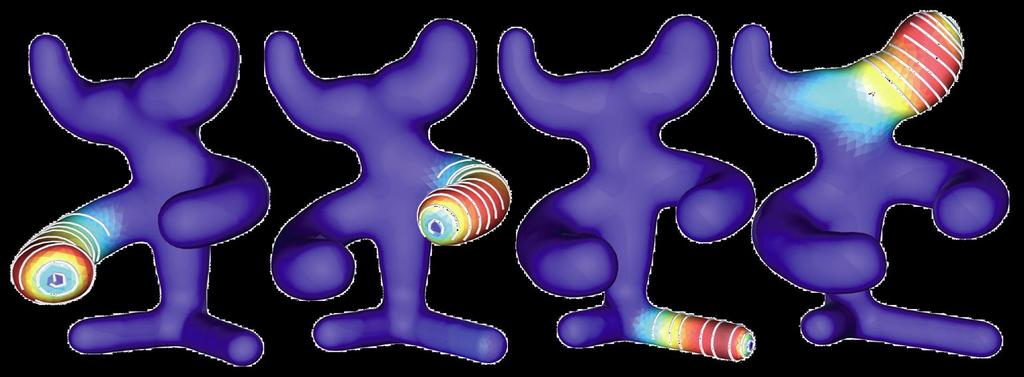
6 Fgure 3: Approxmate Kllng vector felds. Equvalently, 0 = T, DT V. Fnally, snce DT V has the same component n the T drecton as T V (the covarant dervatve of V n the drecton T ) we conclude that 0 = T, T V. (1) For V to be a Kllng vector feld, ths relaton must hold for every vector feld T on S. Except on surfaces wth hgh degrees of symmetry, t s often not possble to fnd a vector feld V for whch (1) holds exactly for every T. Instead, one can fnd approxmate Kllng vector felds va a least squares approach. Denotng P V = T, T V, we seek a V whch mnmzes the Kllng energy P V 2. S Some examples of approxmate Kllng vector felds are shown n Fg. 3. 6
Geometric Registration for Deformable Shapes. 2.1 ICP + Tangent Space optimization for Rigid Motions
 Geometrc Regstraton for Deformable Shapes 2.1 ICP + Tangent Space optmzaton for Rgd Motons Regstraton Problem Gven Two pont cloud data sets P (model) and Q (data) sampled from surfaces Φ P and Φ Q respectvely.
Geometrc Regstraton for Deformable Shapes 2.1 ICP + Tangent Space optmzaton for Rgd Motons Regstraton Problem Gven Two pont cloud data sets P (model) and Q (data) sampled from surfaces Φ P and Φ Q respectvely.
NUMERICAL DIFFERENTIATION
 NUMERICAL DIFFERENTIATION 1 Introducton Dfferentaton s a method to compute the rate at whch a dependent output y changes wth respect to the change n the ndependent nput x. Ths rate of change s called the
NUMERICAL DIFFERENTIATION 1 Introducton Dfferentaton s a method to compute the rate at whch a dependent output y changes wth respect to the change n the ndependent nput x. Ths rate of change s called the
A Quantum Gauss-Bonnet Theorem
 A Quantum Gauss-Bonnet Theorem Tyler Fresen November 13, 2014 Curvature n the plane Let Γ be a smooth curve wth orentaton n R 2, parametrzed by arc length. The curvature k of Γ s ± Γ, where the sgn s postve
A Quantum Gauss-Bonnet Theorem Tyler Fresen November 13, 2014 Curvature n the plane Let Γ be a smooth curve wth orentaton n R 2, parametrzed by arc length. The curvature k of Γ s ± Γ, where the sgn s postve
Lecture 12: Discrete Laplacian
 Lecture 12: Dscrete Laplacan Scrbe: Tanye Lu Our goal s to come up wth a dscrete verson of Laplacan operator for trangulated surfaces, so that we can use t n practce to solve related problems We are mostly
Lecture 12: Dscrete Laplacan Scrbe: Tanye Lu Our goal s to come up wth a dscrete verson of Laplacan operator for trangulated surfaces, so that we can use t n practce to solve related problems We are mostly
Affine and Riemannian Connections
 Affne and Remannan Connectons Semnar Remannan Geometry Summer Term 2015 Prof Dr Anna Wenhard and Dr Gye-Seon Lee Jakob Ullmann Notaton: X(M) space of smooth vector felds on M D(M) space of smooth functons
Affne and Remannan Connectons Semnar Remannan Geometry Summer Term 2015 Prof Dr Anna Wenhard and Dr Gye-Seon Lee Jakob Ullmann Notaton: X(M) space of smooth vector felds on M D(M) space of smooth functons
Representation theory and quantum mechanics tutorial Representation theory and quantum conservation laws
 Representaton theory and quantum mechancs tutoral Representaton theory and quantum conservaton laws Justn Campbell August 1, 2017 1 Generaltes on representaton theory 1.1 Let G GL m (R) be a real algebrac
Representaton theory and quantum mechancs tutoral Representaton theory and quantum conservaton laws Justn Campbell August 1, 2017 1 Generaltes on representaton theory 1.1 Let G GL m (R) be a real algebrac
Module 3 LOSSY IMAGE COMPRESSION SYSTEMS. Version 2 ECE IIT, Kharagpur
 Module 3 LOSSY IMAGE COMPRESSION SYSTEMS Verson ECE IIT, Kharagpur Lesson 6 Theory of Quantzaton Verson ECE IIT, Kharagpur Instructonal Objectves At the end of ths lesson, the students should be able to:
Module 3 LOSSY IMAGE COMPRESSION SYSTEMS Verson ECE IIT, Kharagpur Lesson 6 Theory of Quantzaton Verson ECE IIT, Kharagpur Instructonal Objectves At the end of ths lesson, the students should be able to:
ELASTIC WAVE PROPAGATION IN A CONTINUOUS MEDIUM
 ELASTIC WAVE PROPAGATION IN A CONTINUOUS MEDIUM An elastc wave s a deformaton of the body that travels throughout the body n all drectons. We can examne the deformaton over a perod of tme by fxng our look
ELASTIC WAVE PROPAGATION IN A CONTINUOUS MEDIUM An elastc wave s a deformaton of the body that travels throughout the body n all drectons. We can examne the deformaton over a perod of tme by fxng our look
Inner Product. Euclidean Space. Orthonormal Basis. Orthogonal
 Inner Product Defnton 1 () A Eucldean space s a fnte-dmensonal vector space over the reals R, wth an nner product,. Defnton 2 (Inner Product) An nner product, on a real vector space X s a symmetrc, blnear,
Inner Product Defnton 1 () A Eucldean space s a fnte-dmensonal vector space over the reals R, wth an nner product,. Defnton 2 (Inner Product) An nner product, on a real vector space X s a symmetrc, blnear,
CSci 6974 and ECSE 6966 Math. Tech. for Vision, Graphics and Robotics Lecture 21, April 17, 2006 Estimating A Plane Homography
 CSc 6974 and ECSE 6966 Math. Tech. for Vson, Graphcs and Robotcs Lecture 21, Aprl 17, 2006 Estmatng A Plane Homography Overvew We contnue wth a dscusson of the major ssues, usng estmaton of plane projectve
CSc 6974 and ECSE 6966 Math. Tech. for Vson, Graphcs and Robotcs Lecture 21, Aprl 17, 2006 Estmatng A Plane Homography Overvew We contnue wth a dscusson of the major ssues, usng estmaton of plane projectve
1 Matrix representations of canonical matrices
 1 Matrx representatons of canoncal matrces 2-d rotaton around the orgn: ( ) cos θ sn θ R 0 = sn θ cos θ 3-d rotaton around the x-axs: R x = 1 0 0 0 cos θ sn θ 0 sn θ cos θ 3-d rotaton around the y-axs:
1 Matrx representatons of canoncal matrces 2-d rotaton around the orgn: ( ) cos θ sn θ R 0 = sn θ cos θ 3-d rotaton around the x-axs: R x = 1 0 0 0 cos θ sn θ 0 sn θ cos θ 3-d rotaton around the y-axs:
Tracking with Kalman Filter
 Trackng wth Kalman Flter Scott T. Acton Vrgna Image and Vdeo Analyss (VIVA), Charles L. Brown Department of Electrcal and Computer Engneerng Department of Bomedcal Engneerng Unversty of Vrgna, Charlottesvlle,
Trackng wth Kalman Flter Scott T. Acton Vrgna Image and Vdeo Analyss (VIVA), Charles L. Brown Department of Electrcal and Computer Engneerng Department of Bomedcal Engneerng Unversty of Vrgna, Charlottesvlle,
Lectures - Week 4 Matrix norms, Conditioning, Vector Spaces, Linear Independence, Spanning sets and Basis, Null space and Range of a Matrix
 Lectures - Week 4 Matrx norms, Condtonng, Vector Spaces, Lnear Independence, Spannng sets and Bass, Null space and Range of a Matrx Matrx Norms Now we turn to assocatng a number to each matrx. We could
Lectures - Week 4 Matrx norms, Condtonng, Vector Spaces, Lnear Independence, Spannng sets and Bass, Null space and Range of a Matrx Matrx Norms Now we turn to assocatng a number to each matrx. We could
STATS 306B: Unsupervised Learning Spring Lecture 10 April 30
 STATS 306B: Unsupervsed Learnng Sprng 2014 Lecture 10 Aprl 30 Lecturer: Lester Mackey Scrbe: Joey Arthur, Rakesh Achanta 10.1 Factor Analyss 10.1.1 Recap Recall the factor analyss (FA) model for lnear
STATS 306B: Unsupervsed Learnng Sprng 2014 Lecture 10 Aprl 30 Lecturer: Lester Mackey Scrbe: Joey Arthur, Rakesh Achanta 10.1 Factor Analyss 10.1.1 Recap Recall the factor analyss (FA) model for lnear
The equation of motion of a dynamical system is given by a set of differential equations. That is (1)
") Dynamcal Systems Many engneerng and natural systems are dynamcal systems. For example a pendulum s a dynamcal system. State l The state of the dynamcal system specfes t condtons. For a pendulum n the absence
Dynamcal Systems Many engneerng and natural systems are dynamcal systems. For example a pendulum s a dynamcal system. State l The state of the dynamcal system specfes t condtons. For a pendulum n the absence
The Feynman path integral
 The Feynman path ntegral Aprl 3, 205 Hesenberg and Schrödnger pctures The Schrödnger wave functon places the tme dependence of a physcal system n the state, ψ, t, where the state s a vector n Hlbert space
The Feynman path ntegral Aprl 3, 205 Hesenberg and Schrödnger pctures The Schrödnger wave functon places the tme dependence of a physcal system n the state, ψ, t, where the state s a vector n Hlbert space
Physics 5153 Classical Mechanics. Principle of Virtual Work-1
 P. Guterrez 1 Introducton Physcs 5153 Classcal Mechancs Prncple of Vrtual Work The frst varatonal prncple we encounter n mechancs s the prncple of vrtual work. It establshes the equlbrum condton of a mechancal
P. Guterrez 1 Introducton Physcs 5153 Classcal Mechancs Prncple of Vrtual Work The frst varatonal prncple we encounter n mechancs s the prncple of vrtual work. It establshes the equlbrum condton of a mechancal
χ x B E (c) Figure 2.1.1: (a) a material particle in a body, (b) a place in space, (c) a configuration of the body
 Figure 2.1.1: (a) a material particle in a body, (b) a place in space, (c) a configuration of the body") Secton.. Moton.. The Materal Body and Moton hyscal materals n the real world are modeled usng an abstract mathematcal entty called a body. Ths body conssts of an nfnte number of materal partcles. Shown
Secton.. Moton.. The Materal Body and Moton hyscal materals n the real world are modeled usng an abstract mathematcal entty called a body. Ths body conssts of an nfnte number of materal partcles. Shown
Modelli Clamfim Equazione del Calore Lezione ottobre 2014
 CLAMFIM Bologna Modell 1 @ Clamfm Equazone del Calore Lezone 17 15 ottobre 2014 professor Danele Rtell danele.rtell@unbo.t 1/24? Convoluton The convoluton of two functons g(t) and f(t) s the functon (g
CLAMFIM Bologna Modell 1 @ Clamfm Equazone del Calore Lezone 17 15 ottobre 2014 professor Danele Rtell danele.rtell@unbo.t 1/24? Convoluton The convoluton of two functons g(t) and f(t) s the functon (g
1 Derivation of Point-to-Plane Minimization
 1 Dervaton of Pont-to-Plane Mnmzaton Consder the Chen-Medon (pont-to-plane) framework for ICP. Assume we have a collecton of ponts (p, q ) wth normals n. We want to determne the optmal rotaton and translaton
1 Dervaton of Pont-to-Plane Mnmzaton Consder the Chen-Medon (pont-to-plane) framework for ICP. Assume we have a collecton of ponts (p, q ) wth normals n. We want to determne the optmal rotaton and translaton
The Second Anti-Mathima on Game Theory
 The Second Ant-Mathma on Game Theory Ath. Kehagas December 1 2006 1 Introducton In ths note we wll examne the noton of game equlbrum for three types of games 1. 2-player 2-acton zero-sum games 2. 2-player
The Second Ant-Mathma on Game Theory Ath. Kehagas December 1 2006 1 Introducton In ths note we wll examne the noton of game equlbrum for three types of games 1. 2-player 2-acton zero-sum games 2. 2-player
2E Pattern Recognition Solutions to Introduction to Pattern Recognition, Chapter 2: Bayesian pattern classification
 E395 - Pattern Recognton Solutons to Introducton to Pattern Recognton, Chapter : Bayesan pattern classfcaton Preface Ths document s a soluton manual for selected exercses from Introducton to Pattern Recognton
E395 - Pattern Recognton Solutons to Introducton to Pattern Recognton, Chapter : Bayesan pattern classfcaton Preface Ths document s a soluton manual for selected exercses from Introducton to Pattern Recognton
CME 302: NUMERICAL LINEAR ALGEBRA FALL 2005/06 LECTURE 13
 CME 30: NUMERICAL LINEAR ALGEBRA FALL 005/06 LECTURE 13 GENE H GOLUB 1 Iteratve Methods Very large problems (naturally sparse, from applcatons): teratve methods Structured matrces (even sometmes dense,
CME 30: NUMERICAL LINEAR ALGEBRA FALL 005/06 LECTURE 13 GENE H GOLUB 1 Iteratve Methods Very large problems (naturally sparse, from applcatons): teratve methods Structured matrces (even sometmes dense,
n α j x j = 0 j=1 has a nontrivial solution. Here A is the n k matrix whose jth column is the vector for all t j=0
 MODULE 2 Topcs: Lnear ndependence, bass and dmenson We have seen that f n a set of vectors one vector s a lnear combnaton of the remanng vectors n the set then the span of the set s unchanged f that vector
MODULE 2 Topcs: Lnear ndependence, bass and dmenson We have seen that f n a set of vectors one vector s a lnear combnaton of the remanng vectors n the set then the span of the set s unchanged f that vector
Convexity preserving interpolation by splines of arbitrary degree
 Computer Scence Journal of Moldova, vol.18, no.1(52), 2010 Convexty preservng nterpolaton by splnes of arbtrary degree Igor Verlan Abstract In the present paper an algorthm of C 2 nterpolaton of dscrete
Computer Scence Journal of Moldova, vol.18, no.1(52), 2010 Convexty preservng nterpolaton by splnes of arbtrary degree Igor Verlan Abstract In the present paper an algorthm of C 2 nterpolaton of dscrete
Bézier curves. Michael S. Floater. September 10, These notes provide an introduction to Bézier curves. i=0
 Bézer curves Mchael S. Floater September 1, 215 These notes provde an ntroducton to Bézer curves. 1 Bernsten polynomals Recall that a real polynomal of a real varable x R, wth degree n, s a functon of
Bézer curves Mchael S. Floater September 1, 215 These notes provde an ntroducton to Bézer curves. 1 Bernsten polynomals Recall that a real polynomal of a real varable x R, wth degree n, s a functon of
Nice plotting of proteins II
 Nce plottng of protens II Fnal remark regardng effcency: It s possble to wrte the Newton representaton n a way that can be computed effcently, usng smlar bracketng that we made for the frst representaton
Nce plottng of protens II Fnal remark regardng effcency: It s possble to wrte the Newton representaton n a way that can be computed effcently, usng smlar bracketng that we made for the frst representaton
CS4495/6495 Introduction to Computer Vision. 3C-L3 Calibrating cameras
 CS4495/6495 Introducton to Computer Vson 3C-L3 Calbratng cameras Fnally (last tme): Camera parameters Projecton equaton the cumulatve effect of all parameters: M (3x4) f s x ' 1 0 0 0 c R 0 I T 3 3 3 x1
CS4495/6495 Introducton to Computer Vson 3C-L3 Calbratng cameras Fnally (last tme): Camera parameters Projecton equaton the cumulatve effect of all parameters: M (3x4) f s x ' 1 0 0 0 c R 0 I T 3 3 3 x1
Lecture 10 Support Vector Machines II
 Lecture 10 Support Vector Machnes II 22 February 2016 Taylor B. Arnold Yale Statstcs STAT 365/665 1/28 Notes: Problem 3 s posted and due ths upcomng Frday There was an early bug n the fake-test data; fxed
Lecture 10 Support Vector Machnes II 22 February 2016 Taylor B. Arnold Yale Statstcs STAT 365/665 1/28 Notes: Problem 3 s posted and due ths upcomng Frday There was an early bug n the fake-test data; fxed
DUE: WEDS FEB 21ST 2018
 HOMEWORK # 1: FINITE DIFFERENCES IN ONE DIMENSION DUE: WEDS FEB 21ST 2018 1. Theory Beam bendng s a classcal engneerng analyss. The tradtonal soluton technque makes smplfyng assumptons such as a constant
HOMEWORK # 1: FINITE DIFFERENCES IN ONE DIMENSION DUE: WEDS FEB 21ST 2018 1. Theory Beam bendng s a classcal engneerng analyss. The tradtonal soluton technque makes smplfyng assumptons such as a constant
( ) = ( ) + ( 0) ) ( )
 = ( ) + ( 0) ) ( )") EETOMAGNETI OMPATIBIITY HANDBOOK 1 hapter 9: Transent Behavor n the Tme Doman 9.1 Desgn a crcut usng reasonable values for the components that s capable of provdng a tme delay of 100 ms to a dgtal sgnal.
EETOMAGNETI OMPATIBIITY HANDBOOK 1 hapter 9: Transent Behavor n the Tme Doman 9.1 Desgn a crcut usng reasonable values for the components that s capable of provdng a tme delay of 100 ms to a dgtal sgnal.
CHAPTER-5 INFORMATION MEASURE OF FUZZY MATRIX AND FUZZY BINARY RELATION
 CAPTER- INFORMATION MEASURE OF FUZZY MATRI AN FUZZY BINARY RELATION Introducton The basc concept of the fuzz matr theor s ver smple and can be appled to socal and natural stuatons A branch of fuzz matr
CAPTER- INFORMATION MEASURE OF FUZZY MATRI AN FUZZY BINARY RELATION Introducton The basc concept of the fuzz matr theor s ver smple and can be appled to socal and natural stuatons A branch of fuzz matr
EEE 241: Linear Systems
 EEE : Lnear Systems Summary #: Backpropagaton BACKPROPAGATION The perceptron rule as well as the Wdrow Hoff learnng were desgned to tran sngle layer networks. They suffer from the same dsadvantage: they
EEE : Lnear Systems Summary #: Backpropagaton BACKPROPAGATION The perceptron rule as well as the Wdrow Hoff learnng were desgned to tran sngle layer networks. They suffer from the same dsadvantage: they
Differentiating Gaussian Processes
 Dfferentatng Gaussan Processes Andrew McHutchon Aprl 17, 013 1 Frst Order Dervatve of the Posteror Mean The posteror mean of a GP s gven by, f = x, X KX, X 1 y x, X α 1 Only the x, X term depends on the
Dfferentatng Gaussan Processes Andrew McHutchon Aprl 17, 013 1 Frst Order Dervatve of the Posteror Mean The posteror mean of a GP s gven by, f = x, X KX, X 1 y x, X α 1 Only the x, X term depends on the
Hidden Markov Models & The Multivariate Gaussian (10/26/04)
") CS281A/Stat241A: Statstcal Learnng Theory Hdden Markov Models & The Multvarate Gaussan (10/26/04) Lecturer: Mchael I. Jordan Scrbes: Jonathan W. Hu 1 Hdden Markov Models As a bref revew, hdden Markov models
CS281A/Stat241A: Statstcal Learnng Theory Hdden Markov Models & The Multvarate Gaussan (10/26/04) Lecturer: Mchael I. Jordan Scrbes: Jonathan W. Hu 1 Hdden Markov Models As a bref revew, hdden Markov models
COMPOSITE BEAM WITH WEAK SHEAR CONNECTION SUBJECTED TO THERMAL LOAD
 COMPOSITE BEAM WITH WEAK SHEAR CONNECTION SUBJECTED TO THERMAL LOAD Ákos Jósef Lengyel, István Ecsed Assstant Lecturer, Professor of Mechancs, Insttute of Appled Mechancs, Unversty of Mskolc, Mskolc-Egyetemváros,
COMPOSITE BEAM WITH WEAK SHEAR CONNECTION SUBJECTED TO THERMAL LOAD Ákos Jósef Lengyel, István Ecsed Assstant Lecturer, Professor of Mechancs, Insttute of Appled Mechancs, Unversty of Mskolc, Mskolc-Egyetemváros,
Efficient, General Point Cloud Registration with Kernel Feature Maps
 Effcent, General Pont Cloud Regstraton wth Kernel Feature Maps Hanchen Xong, Sandor Szedmak, Justus Pater Insttute of Computer Scence Unversty of Innsbruck 30 May 2013 Hanchen Xong (Un.Innsbruck) 3D Regstraton
Effcent, General Pont Cloud Regstraton wth Kernel Feature Maps Hanchen Xong, Sandor Szedmak, Justus Pater Insttute of Computer Scence Unversty of Innsbruck 30 May 2013 Hanchen Xong (Un.Innsbruck) 3D Regstraton
Gravitational Acceleration: A case of constant acceleration (approx. 2 hr.) (6/7/11)
 (6/7/11)") Gravtatonal Acceleraton: A case of constant acceleraton (approx. hr.) (6/7/11) Introducton The gravtatonal force s one of the fundamental forces of nature. Under the nfluence of ths force all objects havng
Gravtatonal Acceleraton: A case of constant acceleraton (approx. hr.) (6/7/11) Introducton The gravtatonal force s one of the fundamental forces of nature. Under the nfluence of ths force all objects havng
Numerical Heat and Mass Transfer
 Master degree n Mechancal Engneerng Numercal Heat and Mass Transfer 06-Fnte-Dfference Method (One-dmensonal, steady state heat conducton) Fausto Arpno f.arpno@uncas.t Introducton Why we use models and
Master degree n Mechancal Engneerng Numercal Heat and Mass Transfer 06-Fnte-Dfference Method (One-dmensonal, steady state heat conducton) Fausto Arpno f.arpno@uncas.t Introducton Why we use models and
Lecture 4: Universal Hash Functions/Streaming Cont d
 CSE 5: Desgn and Analyss of Algorthms I Sprng 06 Lecture 4: Unversal Hash Functons/Streamng Cont d Lecturer: Shayan Oves Gharan Aprl 6th Scrbe: Jacob Schreber Dsclamer: These notes have not been subjected
CSE 5: Desgn and Analyss of Algorthms I Sprng 06 Lecture 4: Unversal Hash Functons/Streamng Cont d Lecturer: Shayan Oves Gharan Aprl 6th Scrbe: Jacob Schreber Dsclamer: These notes have not been subjected
PHYS 705: Classical Mechanics. Newtonian Mechanics
 1 PHYS 705: Classcal Mechancs Newtonan Mechancs Quck Revew of Newtonan Mechancs Basc Descrpton: -An dealzed pont partcle or a system of pont partcles n an nertal reference frame [Rgd bodes (ch. 5 later)]
1 PHYS 705: Classcal Mechancs Newtonan Mechancs Quck Revew of Newtonan Mechancs Basc Descrpton: -An dealzed pont partcle or a system of pont partcles n an nertal reference frame [Rgd bodes (ch. 5 later)]
APPENDIX A Some Linear Algebra
 APPENDIX A Some Lnear Algebra The collecton of m, n matrces A.1 Matrces a 1,1,..., a 1,n A = a m,1,..., a m,n wth real elements a,j s denoted by R m,n. If n = 1 then A s called a column vector. Smlarly,
APPENDIX A Some Lnear Algebra The collecton of m, n matrces A.1 Matrces a 1,1,..., a 1,n A = a m,1,..., a m,n wth real elements a,j s denoted by R m,n. If n = 1 then A s called a column vector. Smlarly,
DO NOT DO HOMEWORK UNTIL IT IS ASSIGNED. THE ASSIGNMENTS MAY CHANGE UNTIL ANNOUNCED.
 EE 539 Homeworks Sprng 08 Updated: Tuesday, Aprl 7, 08 DO NOT DO HOMEWORK UNTIL IT IS ASSIGNED. THE ASSIGNMENTS MAY CHANGE UNTIL ANNOUNCED. For full credt, show all work. Some problems requre hand calculatons.
EE 539 Homeworks Sprng 08 Updated: Tuesday, Aprl 7, 08 DO NOT DO HOMEWORK UNTIL IT IS ASSIGNED. THE ASSIGNMENTS MAY CHANGE UNTIL ANNOUNCED. For full credt, show all work. Some problems requre hand calculatons.
More metrics on cartesian products
 More metrcs on cartesan products If (X, d ) are metrc spaces for 1 n, then n Secton II4 of the lecture notes we defned three metrcs on X whose underlyng topologes are the product topology The purpose of
More metrcs on cartesan products If (X, d ) are metrc spaces for 1 n, then n Secton II4 of the lecture notes we defned three metrcs on X whose underlyng topologes are the product topology The purpose of
CHAPTER 5: Lie Differentiation and Angular Momentum
 CHAPTER 5: Le Dfferentaton and Angular Momentum Jose G. Vargas 1 Le dfferentaton Kähler s theory of angular momentum s a specalzaton of hs approach to Le dfferentaton. We could deal wth the former drectly,
CHAPTER 5: Le Dfferentaton and Angular Momentum Jose G. Vargas 1 Le dfferentaton Kähler s theory of angular momentum s a specalzaton of hs approach to Le dfferentaton. We could deal wth the former drectly,
A particle in a state of uniform motion remain in that state of motion unless acted upon by external force.
 The fundamental prncples of classcal mechancs were lad down by Galleo and Newton n the 16th and 17th centures. In 1686, Newton wrote the Prncpa where he gave us three laws of moton, one law of gravty,
The fundamental prncples of classcal mechancs were lad down by Galleo and Newton n the 16th and 17th centures. In 1686, Newton wrote the Prncpa where he gave us three laws of moton, one law of gravty,
Week 9 Chapter 10 Section 1-5
 Week 9 Chapter 10 Secton 1-5 Rotaton Rgd Object A rgd object s one that s nondeformable The relatve locatons of all partcles makng up the object reman constant All real objects are deformable to some extent,
Week 9 Chapter 10 Secton 1-5 Rotaton Rgd Object A rgd object s one that s nondeformable The relatve locatons of all partcles makng up the object reman constant All real objects are deformable to some extent,
Using T.O.M to Estimate Parameter of distributions that have not Single Exponential Family
 IOSR Journal of Mathematcs IOSR-JM) ISSN: 2278-5728. Volume 3, Issue 3 Sep-Oct. 202), PP 44-48 www.osrjournals.org Usng T.O.M to Estmate Parameter of dstrbutons that have not Sngle Exponental Famly Jubran
IOSR Journal of Mathematcs IOSR-JM) ISSN: 2278-5728. Volume 3, Issue 3 Sep-Oct. 202), PP 44-48 www.osrjournals.org Usng T.O.M to Estmate Parameter of dstrbutons that have not Sngle Exponental Famly Jubran
VQ widely used in coding speech, image, and video
 at Scalar quantzers are specal cases of vector quantzers (VQ): they are constraned to look at one sample at a tme (memoryless) VQ does not have such constrant better RD perfomance expected Source codng
at Scalar quantzers are specal cases of vector quantzers (VQ): they are constraned to look at one sample at a tme (memoryless) VQ does not have such constrant better RD perfomance expected Source codng
6.3.4 Modified Euler s method of integration
 6.3.4 Modfed Euler s method of ntegraton Before dscussng the applcaton of Euler s method for solvng the swng equatons, let us frst revew the basc Euler s method of numercal ntegraton. Let the general from
6.3.4 Modfed Euler s method of ntegraton Before dscussng the applcaton of Euler s method for solvng the swng equatons, let us frst revew the basc Euler s method of numercal ntegraton. Let the general from
3.1 Expectation of Functions of Several Random Variables. )' be a k-dimensional discrete or continuous random vector, with joint PMF p (, E X E X1 E X
' be a k-dimensional discrete or continuous random vector, with joint PMF p (, E X E X1 E X") Statstcs 1: Probablty Theory II 37 3 EPECTATION OF SEVERAL RANDOM VARIABLES As n Probablty Theory I, the nterest n most stuatons les not on the actual dstrbuton of a random vector, but rather on a number
Statstcs 1: Probablty Theory II 37 3 EPECTATION OF SEVERAL RANDOM VARIABLES As n Probablty Theory I, the nterest n most stuatons les not on the actual dstrbuton of a random vector, but rather on a number
Bezier curves. Michael S. Floater. August 25, These notes provide an introduction to Bezier curves. i=0
 Bezer curves Mchael S. Floater August 25, 211 These notes provde an ntroducton to Bezer curves. 1 Bernsten polynomals Recall that a real polynomal of a real varable x R, wth degree n, s a functon of the
Bezer curves Mchael S. Floater August 25, 211 These notes provde an ntroducton to Bezer curves. 1 Bernsten polynomals Recall that a real polynomal of a real varable x R, wth degree n, s a functon of the
Kinematics of Fluids. Lecture 16. (Refer the text book CONTINUUM MECHANICS by GEORGE E. MASE, Schaum s Outlines) 17/02/2017
 17/02/2017") 17/0/017 Lecture 16 (Refer the text boo CONTINUUM MECHANICS by GEORGE E. MASE, Schaum s Outlnes) Knematcs of Fluds Last class, we started dscussng about the nematcs of fluds. Recall the Lagrangan and Euleran
17/0/017 Lecture 16 (Refer the text boo CONTINUUM MECHANICS by GEORGE E. MASE, Schaum s Outlnes) Knematcs of Fluds Last class, we started dscussng about the nematcs of fluds. Recall the Lagrangan and Euleran
Projective change between two Special (α, β)- Finsler Metrics
- Finsler Metrics") Internatonal Journal of Trend n Research and Development, Volume 2(6), ISSN 2394-9333 www.jtrd.com Projectve change between two Specal (, β)- Fnsler Metrcs Gayathr.K 1 and Narasmhamurthy.S.K 2 1 Assstant
Internatonal Journal of Trend n Research and Development, Volume 2(6), ISSN 2394-9333 www.jtrd.com Projectve change between two Specal (, β)- Fnsler Metrcs Gayathr.K 1 and Narasmhamurthy.S.K 2 1 Assstant
8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS
 SECTION 8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS 493 8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS All the vector spaces you have studed thus far n the text are real vector spaces because the scalars
SECTION 8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS 493 8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS All the vector spaces you have studed thus far n the text are real vector spaces because the scalars
Solutions to exam in SF1811 Optimization, Jan 14, 2015
 Solutons to exam n SF8 Optmzaton, Jan 4, 25 3 3 O------O -4 \ / \ / The network: \/ where all lnks go from left to rght. /\ / \ / \ 6 O------O -5 2 4.(a) Let x = ( x 3, x 4, x 23, x 24 ) T, where the varable
Solutons to exam n SF8 Optmzaton, Jan 4, 25 3 3 O------O -4 \ / \ / The network: \/ where all lnks go from left to rght. /\ / \ / \ 6 O------O -5 2 4.(a) Let x = ( x 3, x 4, x 23, x 24 ) T, where the varable
Physics 207: Lecture 20. Today s Agenda Homework for Monday
 Physcs 207: Lecture 20 Today s Agenda Homework for Monday Recap: Systems of Partcles Center of mass Velocty and acceleraton of the center of mass Dynamcs of the center of mass Lnear Momentum Example problems
Physcs 207: Lecture 20 Today s Agenda Homework for Monday Recap: Systems of Partcles Center of mass Velocty and acceleraton of the center of mass Dynamcs of the center of mass Lnear Momentum Example problems
ENGN 40 Dynamics and Vibrations Homework # 7 Due: Friday, April 15
 NGN 40 ynamcs and Vbratons Homework # 7 ue: Frday, Aprl 15 1. Consder a concal hostng drum used n the mnng ndustry to host a mass up/down. A cable of dameter d has the mass connected at one end and s wound/unwound
NGN 40 ynamcs and Vbratons Homework # 7 ue: Frday, Aprl 15 1. Consder a concal hostng drum used n the mnng ndustry to host a mass up/down. A cable of dameter d has the mass connected at one end and s wound/unwound
Lecture 3: Probability Distributions
 Lecture 3: Probablty Dstrbutons Random Varables Let us begn by defnng a sample space as a set of outcomes from an experment. We denote ths by S. A random varable s a functon whch maps outcomes nto the
Lecture 3: Probablty Dstrbutons Random Varables Let us begn by defnng a sample space as a set of outcomes from an experment. We denote ths by S. A random varable s a functon whch maps outcomes nto the
Three views of mechanics
 Three vews of mechancs John Hubbard, n L. Gross s course February 1, 211 1 Introducton A mechancal system s manfold wth a Remannan metrc K : T M R called knetc energy and a functon V : M R called potental
Three vews of mechancs John Hubbard, n L. Gross s course February 1, 211 1 Introducton A mechancal system s manfold wth a Remannan metrc K : T M R called knetc energy and a functon V : M R called potental
Chapter Eight. Review and Summary. Two methods in solid mechanics ---- vectorial methods and energy methods or variational methods
 Chapter Eght Energy Method 8. Introducton 8. Stran energy expressons 8.3 Prncpal of statonary potental energy; several degrees of freedom ------ Castglano s frst theorem ---- Examples 8.4 Prncpal of statonary
Chapter Eght Energy Method 8. Introducton 8. Stran energy expressons 8.3 Prncpal of statonary potental energy; several degrees of freedom ------ Castglano s frst theorem ---- Examples 8.4 Prncpal of statonary
Snce h( q^; q) = hq ~ and h( p^ ; p) = hp, one can wrte ~ h hq hp = hq ~hp ~ (7) the uncertanty relaton for an arbtrary state. The states that mnmze t
 = hq ~ and h( p^ ; p) = hp, one can wrte ~ h hq hp = hq ~hp ~ (7) the uncertanty relaton for an arbtrary state. The states that mnmze t") 8.5: Many-body phenomena n condensed matter and atomc physcs Last moded: September, 003 Lecture. Squeezed States In ths lecture we shall contnue the dscusson of coherent states, focusng on ther propertes
8.5: Many-body phenomena n condensed matter and atomc physcs Last moded: September, 003 Lecture. Squeezed States In ths lecture we shall contnue the dscusson of coherent states, focusng on ther propertes
COMPARISON OF SOME RELIABILITY CHARACTERISTICS BETWEEN REDUNDANT SYSTEMS REQUIRING SUPPORTING UNITS FOR THEIR OPERATIONS
 Avalable onlne at http://sck.org J. Math. Comput. Sc. 3 (3), No., 6-3 ISSN: 97-537 COMPARISON OF SOME RELIABILITY CHARACTERISTICS BETWEEN REDUNDANT SYSTEMS REQUIRING SUPPORTING UNITS FOR THEIR OPERATIONS
Avalable onlne at http://sck.org J. Math. Comput. Sc. 3 (3), No., 6-3 ISSN: 97-537 COMPARISON OF SOME RELIABILITY CHARACTERISTICS BETWEEN REDUNDANT SYSTEMS REQUIRING SUPPORTING UNITS FOR THEIR OPERATIONS
The Order Relation and Trace Inequalities for. Hermitian Operators
 Internatonal Mathematcal Forum, Vol 3, 08, no, 507-57 HIKARI Ltd, wwwm-hkarcom https://doorg/0988/mf088055 The Order Relaton and Trace Inequaltes for Hermtan Operators Y Huang School of Informaton Scence
Internatonal Mathematcal Forum, Vol 3, 08, no, 507-57 HIKARI Ltd, wwwm-hkarcom https://doorg/0988/mf088055 The Order Relaton and Trace Inequaltes for Hermtan Operators Y Huang School of Informaton Scence
Lecture 3: Shannon s Theorem
 CSE 533: Error-Correctng Codes (Autumn 006 Lecture 3: Shannon s Theorem October 9, 006 Lecturer: Venkatesan Guruswam Scrbe: Wdad Machmouch 1 Communcaton Model The communcaton model we are usng conssts
CSE 533: Error-Correctng Codes (Autumn 006 Lecture 3: Shannon s Theorem October 9, 006 Lecturer: Venkatesan Guruswam Scrbe: Wdad Machmouch 1 Communcaton Model The communcaton model we are usng conssts
5.04, Principles of Inorganic Chemistry II MIT Department of Chemistry Lecture 32: Vibrational Spectroscopy and the IR
 5.0, Prncples of Inorganc Chemstry II MIT Department of Chemstry Lecture 3: Vbratonal Spectroscopy and the IR Vbratonal spectroscopy s confned to the 00-5000 cm - spectral regon. The absorpton of a photon
5.0, Prncples of Inorganc Chemstry II MIT Department of Chemstry Lecture 3: Vbratonal Spectroscopy and the IR Vbratonal spectroscopy s confned to the 00-5000 cm - spectral regon. The absorpton of a photon
Support Vector Machines. Vibhav Gogate The University of Texas at dallas
 Support Vector Machnes Vbhav Gogate he Unversty of exas at dallas What We have Learned So Far? 1. Decson rees. Naïve Bayes 3. Lnear Regresson 4. Logstc Regresson 5. Perceptron 6. Neural networks 7. K-Nearest
Support Vector Machnes Vbhav Gogate he Unversty of exas at dallas What We have Learned So Far? 1. Decson rees. Naïve Bayes 3. Lnear Regresson 4. Logstc Regresson 5. Perceptron 6. Neural networks 7. K-Nearest
princeton univ. F 17 cos 521: Advanced Algorithm Design Lecture 7: LP Duality Lecturer: Matt Weinberg
 prnceton unv. F 17 cos 521: Advanced Algorthm Desgn Lecture 7: LP Dualty Lecturer: Matt Wenberg Scrbe: LP Dualty s an extremely useful tool for analyzng structural propertes of lnear programs. Whle there
prnceton unv. F 17 cos 521: Advanced Algorthm Desgn Lecture 7: LP Dualty Lecturer: Matt Wenberg Scrbe: LP Dualty s an extremely useful tool for analyzng structural propertes of lnear programs. Whle there
Dr. Shalabh Department of Mathematics and Statistics Indian Institute of Technology Kanpur
 Analyss of Varance and Desgn of Exerments-I MODULE III LECTURE - 2 EXPERIMENTAL DESIGN MODELS Dr. Shalabh Deartment of Mathematcs and Statstcs Indan Insttute of Technology Kanur 2 We consder the models
Analyss of Varance and Desgn of Exerments-I MODULE III LECTURE - 2 EXPERIMENTAL DESIGN MODELS Dr. Shalabh Deartment of Mathematcs and Statstcs Indan Insttute of Technology Kanur 2 We consder the models
6. Stochastic processes (2)
") Contents Markov processes Brth-death processes Lect6.ppt S-38.45 - Introducton to Teletraffc Theory Sprng 5 Markov process Consder a contnuous-tme and dscrete-state stochastc process X(t) wth state space
Contents Markov processes Brth-death processes Lect6.ppt S-38.45 - Introducton to Teletraffc Theory Sprng 5 Markov process Consder a contnuous-tme and dscrete-state stochastc process X(t) wth state space
MAE140 - Linear Circuits - Winter 16 Final, March 16, 2016
 ME140 - Lnear rcuts - Wnter 16 Fnal, March 16, 2016 Instructons () The exam s open book. You may use your class notes and textbook. You may use a hand calculator wth no communcaton capabltes. () You have
ME140 - Lnear rcuts - Wnter 16 Fnal, March 16, 2016 Instructons () The exam s open book. You may use your class notes and textbook. You may use a hand calculator wth no communcaton capabltes. () You have
U.C. Berkeley CS294: Beyond Worst-Case Analysis Luca Trevisan September 5, 2017
 U.C. Berkeley CS94: Beyond Worst-Case Analyss Handout 4s Luca Trevsan September 5, 07 Summary of Lecture 4 In whch we ntroduce semdefnte programmng and apply t to Max Cut. Semdefnte Programmng Recall that
U.C. Berkeley CS94: Beyond Worst-Case Analyss Handout 4s Luca Trevsan September 5, 07 Summary of Lecture 4 In whch we ntroduce semdefnte programmng and apply t to Max Cut. Semdefnte Programmng Recall that
Mathematical Preparations
 1 Introducton Mathematcal Preparatons The theory of relatvty was developed to explan experments whch studed the propagaton of electromagnetc radaton n movng coordnate systems. Wthn expermental error the
1 Introducton Mathematcal Preparatons The theory of relatvty was developed to explan experments whch studed the propagaton of electromagnetc radaton n movng coordnate systems. Wthn expermental error the
6. Stochastic processes (2)
") 6. Stochastc processes () Lect6.ppt S-38.45 - Introducton to Teletraffc Theory Sprng 5 6. Stochastc processes () Contents Markov processes Brth-death processes 6. Stochastc processes () Markov process
6. Stochastc processes () Lect6.ppt S-38.45 - Introducton to Teletraffc Theory Sprng 5 6. Stochastc processes () Contents Markov processes Brth-death processes 6. Stochastc processes () Markov process
Lecture 10: May 6, 2013
 TTIC/CMSC 31150 Mathematcal Toolkt Sprng 013 Madhur Tulsan Lecture 10: May 6, 013 Scrbe: Wenje Luo In today s lecture, we manly talked about random walk on graphs and ntroduce the concept of graph expander,
TTIC/CMSC 31150 Mathematcal Toolkt Sprng 013 Madhur Tulsan Lecture 10: May 6, 013 Scrbe: Wenje Luo In today s lecture, we manly talked about random walk on graphs and ntroduce the concept of graph expander,
Eigenvalues of Random Graphs
 Spectral Graph Theory Lecture 2 Egenvalues of Random Graphs Danel A. Spelman November 4, 202 2. Introducton In ths lecture, we consder a random graph on n vertces n whch each edge s chosen to be n the
Spectral Graph Theory Lecture 2 Egenvalues of Random Graphs Danel A. Spelman November 4, 202 2. Introducton In ths lecture, we consder a random graph on n vertces n whch each edge s chosen to be n the
Feb 14: Spatial analysis of data fields
 Feb 4: Spatal analyss of data felds Mappng rregularly sampled data onto a regular grd Many analyss technques for geophyscal data requre the data be located at regular ntervals n space and/or tme. hs s
Feb 4: Spatal analyss of data felds Mappng rregularly sampled data onto a regular grd Many analyss technques for geophyscal data requre the data be located at regular ntervals n space and/or tme. hs s
COMPLEX NUMBERS AND QUADRATIC EQUATIONS
 COMPLEX NUMBERS AND QUADRATIC EQUATIONS INTRODUCTION We know that x 0 for all x R e the square of a real number (whether postve, negatve or ero) s non-negatve Hence the equatons x, x, x + 7 0 etc are not
COMPLEX NUMBERS AND QUADRATIC EQUATIONS INTRODUCTION We know that x 0 for all x R e the square of a real number (whether postve, negatve or ero) s non-negatve Hence the equatons x, x, x + 7 0 etc are not
Physics 53. Rotational Motion 3. Sir, I have found you an argument, but I am not obliged to find you an understanding.
 Physcs 53 Rotatonal Moton 3 Sr, I have found you an argument, but I am not oblged to fnd you an understandng. Samuel Johnson Angular momentum Wth respect to rotatonal moton of a body, moment of nerta plays
Physcs 53 Rotatonal Moton 3 Sr, I have found you an argument, but I am not oblged to fnd you an understandng. Samuel Johnson Angular momentum Wth respect to rotatonal moton of a body, moment of nerta plays
Open Systems: Chemical Potential and Partial Molar Quantities Chemical Potential
 Open Systems: Chemcal Potental and Partal Molar Quanttes Chemcal Potental For closed systems, we have derved the followng relatonshps: du = TdS pdv dh = TdS + Vdp da = SdT pdv dg = VdP SdT For open systems,
Open Systems: Chemcal Potental and Partal Molar Quanttes Chemcal Potental For closed systems, we have derved the followng relatonshps: du = TdS pdv dh = TdS + Vdp da = SdT pdv dg = VdP SdT For open systems,
k t+1 + c t A t k t, t=0
 Macro II (UC3M, MA/PhD Econ) Professor: Matthas Kredler Fnal Exam 6 May 208 You have 50 mnutes to complete the exam There are 80 ponts n total The exam has 4 pages If somethng n the queston s unclear,
Macro II (UC3M, MA/PhD Econ) Professor: Matthas Kredler Fnal Exam 6 May 208 You have 50 mnutes to complete the exam There are 80 ponts n total The exam has 4 pages If somethng n the queston s unclear,
IV. Performance Optimization
 IV. Performance Optmzaton A. Steepest descent algorthm defnton how to set up bounds on learnng rate mnmzaton n a lne (varyng learnng rate) momentum learnng examples B. Newton s method defnton Gauss-Newton
IV. Performance Optmzaton A. Steepest descent algorthm defnton how to set up bounds on learnng rate mnmzaton n a lne (varyng learnng rate) momentum learnng examples B. Newton s method defnton Gauss-Newton
Linear Approximation with Regularization and Moving Least Squares
 Lnear Approxmaton wth Regularzaton and Movng Least Squares Igor Grešovn May 007 Revson 4.6 (Revson : March 004). 5 4 3 0.5 3 3.5 4 Contents: Lnear Fttng...4. Weghted Least Squares n Functon Approxmaton...
Lnear Approxmaton wth Regularzaton and Movng Least Squares Igor Grešovn May 007 Revson 4.6 (Revson : March 004). 5 4 3 0.5 3 3.5 4 Contents: Lnear Fttng...4. Weghted Least Squares n Functon Approxmaton...
Salmon: Lectures on partial differential equations. Consider the general linear, second-order PDE in the form. ,x 2
 Salmon: Lectures on partal dfferental equatons 5. Classfcaton of second-order equatons There are general methods for classfyng hgher-order partal dfferental equatons. One s very general (applyng even to
Salmon: Lectures on partal dfferental equatons 5. Classfcaton of second-order equatons There are general methods for classfyng hgher-order partal dfferental equatons. One s very general (applyng even to
Section 8.3 Polar Form of Complex Numbers
 80 Chapter 8 Secton 8 Polar Form of Complex Numbers From prevous classes, you may have encountered magnary numbers the square roots of negatve numbers and, more generally, complex numbers whch are the
80 Chapter 8 Secton 8 Polar Form of Complex Numbers From prevous classes, you may have encountered magnary numbers the square roots of negatve numbers and, more generally, complex numbers whch are the
12. The Hamilton-Jacobi Equation Michael Fowler
 1. The Hamlton-Jacob Equaton Mchael Fowler Back to Confguraton Space We ve establshed that the acton, regarded as a functon of ts coordnate endponts and tme, satsfes ( ) ( ) S q, t / t+ H qpt,, = 0, and
1. The Hamlton-Jacob Equaton Mchael Fowler Back to Confguraton Space We ve establshed that the acton, regarded as a functon of ts coordnate endponts and tme, satsfes ( ) ( ) S q, t / t+ H qpt,, = 0, and
Thermodynamics and statistical mechanics in materials modelling II
 Course MP3 Lecture 8/11/006 (JAE) Course MP3 Lecture 8/11/006 Thermodynamcs and statstcal mechancs n materals modellng II A bref résumé of the physcal concepts used n materals modellng Dr James Ellott.1
Course MP3 Lecture 8/11/006 (JAE) Course MP3 Lecture 8/11/006 Thermodynamcs and statstcal mechancs n materals modellng II A bref résumé of the physcal concepts used n materals modellng Dr James Ellott.1
5 The Rational Canonical Form
 5 The Ratonal Canoncal Form Here p s a monc rreducble factor of the mnmum polynomal m T and s not necessarly of degree one Let F p denote the feld constructed earler n the course, consstng of all matrces
5 The Ratonal Canoncal Form Here p s a monc rreducble factor of the mnmum polynomal m T and s not necessarly of degree one Let F p denote the feld constructed earler n the course, consstng of all matrces
NP-Completeness : Proofs
 NP-Completeness : Proofs Proof Methods A method to show a decson problem Π NP-complete s as follows. (1) Show Π NP. (2) Choose an NP-complete problem Π. (3) Show Π Π. A method to show an optmzaton problem
NP-Completeness : Proofs Proof Methods A method to show a decson problem Π NP-complete s as follows. (1) Show Π NP. (2) Choose an NP-complete problem Π. (3) Show Π Π. A method to show an optmzaton problem
), it produces a response (output function g (x)
, it produces a response (output function g (x)") Lnear Systems Revew Notes adapted from notes by Mchael Braun Typcally n electrcal engneerng, one s concerned wth functons of tme, such as a voltage waveform System descrpton s therefore defned n the domans
Lnear Systems Revew Notes adapted from notes by Mchael Braun Typcally n electrcal engneerng, one s concerned wth functons of tme, such as a voltage waveform System descrpton s therefore defned n the domans
Tensor Analysis. For orthogonal curvilinear coordinates, ˆ ˆ (98) Expanding the derivative, we have, ˆ. h q. . h q h q
 Expanding the derivative, we have, ˆ. h q. . h q h q") For orthogonal curvlnear coordnates, eˆ grad a a= ( aˆ ˆ e). h q (98) Expandng the dervatve, we have, eˆ aˆ ˆ e a= ˆ ˆ a h e + q q 1 aˆ ˆ ˆ a e = ee ˆˆ ˆ + e. h q h q Now expandng eˆ / q (some of the detals
For orthogonal curvlnear coordnates, eˆ grad a a= ( aˆ ˆ e). h q (98) Expandng the dervatve, we have, eˆ aˆ ˆ e a= ˆ ˆ a h e + q q 1 aˆ ˆ ˆ a e = ee ˆˆ ˆ + e. h q h q Now expandng eˆ / q (some of the detals
CHAPTER 5 NUMERICAL EVALUATION OF DYNAMIC RESPONSE
 CHAPTER 5 NUMERICAL EVALUATION OF DYNAMIC RESPONSE Analytcal soluton s usually not possble when exctaton vares arbtrarly wth tme or f the system s nonlnear. Such problems can be solved by numercal tmesteppng
CHAPTER 5 NUMERICAL EVALUATION OF DYNAMIC RESPONSE Analytcal soluton s usually not possble when exctaton vares arbtrarly wth tme or f the system s nonlnear. Such problems can be solved by numercal tmesteppng
Lagrangian Field Theory
 Lagrangan Feld Theory Adam Lott PHY 391 Aprl 6, 017 1 Introducton Ths paper s a summary of Chapter of Mandl and Shaw s Quantum Feld Theory [1]. The frst thng to do s to fx the notaton. For the most part,
Lagrangan Feld Theory Adam Lott PHY 391 Aprl 6, 017 1 Introducton Ths paper s a summary of Chapter of Mandl and Shaw s Quantum Feld Theory [1]. The frst thng to do s to fx the notaton. For the most part,
Zeros and Zero Dynamics for Linear, Time-delay System
 UNIVERSITA POLITECNICA DELLE MARCHE - FACOLTA DI INGEGNERIA Dpartmento d Ingegnerua Informatca, Gestonale e dell Automazone LabMACS Laboratory of Modelng, Analyss and Control of Dynamcal System Zeros and
UNIVERSITA POLITECNICA DELLE MARCHE - FACOLTA DI INGEGNERIA Dpartmento d Ingegnerua Informatca, Gestonale e dell Automazone LabMACS Laboratory of Modelng, Analyss and Control of Dynamcal System Zeros and
Modelli Clamfim Equazioni differenziali 7 ottobre 2013
 CLAMFIM Bologna Modell 1 @ Clamfm Equazon dfferenzal 7 ottobre 2013 professor Danele Rtell danele.rtell@unbo.t 1/18? Ordnary Dfferental Equatons A dfferental equaton s an equaton that defnes a relatonshp
CLAMFIM Bologna Modell 1 @ Clamfm Equazon dfferenzal 7 ottobre 2013 professor Danele Rtell danele.rtell@unbo.t 1/18? Ordnary Dfferental Equatons A dfferental equaton s an equaton that defnes a relatonshp
PES 1120 Spring 2014, Spendier Lecture 6/Page 1
 PES 110 Sprng 014, Spender Lecture 6/Page 1 Lecture today: Chapter 1) Electrc feld due to charge dstrbutons -> charged rod -> charged rng We ntroduced the electrc feld, E. I defned t as an nvsble aura
PES 110 Sprng 014, Spender Lecture 6/Page 1 Lecture today: Chapter 1) Electrc feld due to charge dstrbutons -> charged rod -> charged rng We ntroduced the electrc feld, E. I defned t as an nvsble aura
Rotation Invariant Shape Contexts based on Feature-space Fourier Transformation
 Fourth Internatonal Conference on Image and Graphcs Rotaton Invarant Shape Contexts based on Feature-space Fourer Transformaton Su Yang 1, Yuanyuan Wang Dept of Computer Scence and Engneerng, Fudan Unversty,
Fourth Internatonal Conference on Image and Graphcs Rotaton Invarant Shape Contexts based on Feature-space Fourer Transformaton Su Yang 1, Yuanyuan Wang Dept of Computer Scence and Engneerng, Fudan Unversty,
where a is any ideal of R. Lemma Let R be a ring. Then X = Spec R is a topological space. Moreover the open sets
 11. Schemes To defne schemes, just as wth algebrac varetes, the dea s to frst defne what an affne scheme s, and then realse an arbtrary scheme, as somethng whch s locally an affne scheme. The defnton of
11. Schemes To defne schemes, just as wth algebrac varetes, the dea s to frst defne what an affne scheme s, and then realse an arbtrary scheme, as somethng whch s locally an affne scheme. The defnton of
Psychology 282 Lecture #24 Outline Regression Diagnostics: Outliers
 Psychology 282 Lecture #24 Outlne Regresson Dagnostcs: Outlers In an earler lecture we studed the statstcal assumptons underlyng the regresson model, ncludng the followng ponts: Formal statement of assumptons.
Psychology 282 Lecture #24 Outlne Regresson Dagnostcs: Outlers In an earler lecture we studed the statstcal assumptons underlyng the regresson model, ncludng the followng ponts: Formal statement of assumptons.
On Tiling for Some Types of Manifolds. and their Folding
 Appled Mathematcal Scences, Vol. 3, 009, no. 6, 75-84 On Tlng for Some Types of Manfolds and ther Foldng H. Rafat Mathematcs Department, Faculty of Scence Tanta Unversty, Tanta Egypt hshamrafat005@yahoo.com
Appled Mathematcal Scences, Vol. 3, 009, no. 6, 75-84 On Tlng for Some Types of Manfolds and ther Foldng H. Rafat Mathematcs Department, Faculty of Scence Tanta Unversty, Tanta Egypt hshamrafat005@yahoo.com