arxiv: v2 [cs.ro] 29 Jun 2015
|
|
|
- Blaze Norris
- 6 years ago
- Views:
Transcription
1 7R Darboux Linkages by Factorization of Motion Polynomials Z. Li RICAM Austrian Academy of Sciences Linz, Austria J. Schicho RISC Johannes Kepler University Linz, Austria June 30, 2015 H.-P. Schröcker Unit Geometry and CAD University of Innsbruck Innsbruck, Austria arxiv: v2 [cs.ro] 29 Jun 2015 Abstract In this paper, we construct two types of 7R closed single loop linkages by combining different factorizations of a general (non-vertical) Darboux motion. These factorizations are obtained by extensions of a factorization algorithm for a generic rational motion. The first type of 7R linkages has several one-dimensional configuration components and one of them corresponds to the Darboux motion. The other type is a 7R linkage with two degrees of freedom and without one-dimensional component. The Darboux motion is a curve in an irreducible two dimensional configuration component. Keywords: 7R linkage, Darboux motion, factorization 1 Introduction In 1881, G. Darboux determined all one-parametric spatial motions with only planar curves as point paths [1]. These properties determine a unique motion which is nowadays named after Darboux. It is the composition of a planar elliptic motion with a suitably oscillating translation perpendicular to that plane. If the elliptic motion degenerates to a rotation, the Darboux motion is called vertical, if this is not the case, we call the Darboux motion non-vertical or general. In both cases, the generic point paths are ellipses. The Darboux motion is a special Schoenfließ motion and we call the direction perpendicular to the planar elliptic motion component the axis direction. These and other properties are well known in literature, see for example [2] or [3, Chapter 9, 3]. In this article, we construct 7R linkages with one degree of freedom such that one link during (one component of) the motion performs a general Darboux motion. These results complement recently presented linkages that generate vertical Darboux motions [4]. The beginnings of this research can be found in [5] where we investigated spatial linkages with a straight line trajectory. The linkages we present in this article are novel. Unlike the linkages of [4], we generate a general (non-vertical) Darboux motion and our linkages are free of prismatic or cylindrical joints. One of our linkages has already be found in [5]. Our description here is more general and detailed. Our linkage construction is based on the factorization of rational motions which has been first introduced in [6]. In the dual quaternion model of rigid body displacements, the Darboux motion is parameterized by a cubic motion polynomial. In general, a cubic motion can be generated by 6R linkages [7 9] but specialties of the Darboux motion prevent application of the factorization algorithm for generic motion polynomials. Therefore, we resort to new factorization techniques for non-generic motion polynomials [10 12], i.e., we multiply the motion polynomial with a real polynomial which divides the primal part of the motion polynomial. The new motion polynomial can be factored in different ways which allows us to obtain new closed 7R linkages by combining different factorizations. A unified algorithm for factorization of generic and non-generic motion polynomials is introduced in [11]. Here, we just mention the basic idea of this algorithm: By factoring out linear motion polynomial factors (from the left and from the right) we create a generic motion polynomial that can be factored by the original algorithm of [6]. We continue this text with a quick introduction to the dual quaternion model of SE(3), the group of rigid body displacements, and to motion polynomials and their factorization (Section 2). In Section 3 we describe the Darboux motion in the dual quaternion model, present different factorizations, and combine them to form 7R linkages. 2 Preliminaries The investigations in this article are based on the dual quaternion model of the group SE(3) of rigid body displacements. We assume familiarity with dual quaternions and their relation to kinematics but we provide a quick introduction of concepts that cannot be found in standard textbooks. For 1
2 more information on basics of dual quaternions and kinematics we refer to [13 15]. A short presentation of the topic with close relations to this article can also be found in [16]. 2.2 Motion polynomials Now we study polynomials 2.1 Dual quaternions A dual quaternion is an object of the shape h = h 0 + h 1 i + h 2 j + h 3 k + ε(h 4 + h 5 i + h 6 j + h 7 k) (1) with real numbers h 0,...,h 7. The associative but noncommutative multiplication of dual quaternions is defined via the relations For example i 2 = j 2 = k 2 = ijk = 1, ε 2 = 0, iε = εi, jε = εj, kε = εk. (1 εi)(j + εk) = j + εk εij ε 2 ik = j + εk εk 0 = j. Conjugate dual quaternion and dual quaternion norm are h = h 0 h 1 i h 2 j h 3 k + ε(h 4 h 5 i h 6 j h 7 k), h = hh. The primal part of h is p = h 0 +h 1 i +h 2 j +h 3 k and the dual part is d = h 4 + h 5 i + h 6 j + h 7 k. Primal and dual part are (ordinary) quaternions. The set of quaternions is denoted by H, the set of dual quaternions by DH := D R H. Writing h = p + εd with p,d H, we have h = pp + ε(pq + qp). Note that both pp and pq + qp are real numbers and the norm itself is a dual number. If the dual quaternion h = p + εd has a real norm (pq + qp = 0), its action on a point [x 0,x 1,x 2,x 3 ] of real projective three-space is defined via x y = pxp + pq qp pp where x = x 0 + x 1 i + x 2 j + x 3 k, y = y 0 + y 1 i + y 2 j + y 3 k and the image point has projective coordinates [y 0,y 1,y 2,y 3 ]. The map (2) describes a rigid body displacement and the composition of such displacements corresponds to dual quaternion multiplication. Note that h and λh with λ R \ {0} describe the same map. The dual quaternion h as in (1) describes a rotation or translation, if and only if h 4 = 0. Among these, translations are characterized by h 1 = h 2 = h 3 = 0. We speak accordingly of rotation or translation quaternions. In the former case, the revolute axis has Plücker coordinates [h 1,h 2,h 3, h 5, h 6, h 7 ]. In particular, the axis direction is (h 1,h 2,h 3 ). (2) C = c n t n + + c 1 t + c 0 (3) in the indeterminate t and with dual quaternion coefficients c n,...,c 0 DH. The set of these quaternions is denoted by DH[t]. Multiplication of polynomials in DH[t] is defined by the convention that indeterminate t and coefficients commute. The conjugate polynomial C is the polynomial with conjugate coefficients c n,...,c 0. A polynomial C DH[t] is called a motion polynomial, if its leading coefficient c n is invertible (has non-zero primal part) and the so-called norm polynomial CC has real coefficients. In this case, it parameterizes a rational motion via the map (2). Note that C and QC parameterize the same rational motion if Q is a real polynomial without zeros. This observation will be important in the next section. The linear polynomial C = t h with h as in (1) is a motion polynomial if and only if h 4 = h 1 h 5 + h 2 h 6 + h 3 h 7 = 0. Assuming (h 1,h 2,h 3 ) (0,0,0), the displacements described by C for varying t are rotations about a fixed axis but with different revolute angle. The axis Plücker coordinates are [h 1,h 2,h 3, h 5, h 6, h 7 ] and (h 1,h 2,h 3 ) is a direction vector of the axis. A generic motion polynomial C of degree n admits n! factorizations of the shape C = (t h 1 ) (t h n ) (4) with rotation quaternions h 1,...,h n. The precise statement and a factorization algorithm can be found in [6]. Here is suffices to say that a Darboux motion is not generic and the general theory of [6] gives no information about existence or non-existence of factorizations. Equation (4) admits an important kinematic interpretation: Each factorization corresponds to a one-parametric motion of an open chain of n revolute joints whose end-effector follows the motion parameterized by C. The revolute axes are determined by the rotation quaternions h 1,...,h n. Different factorizations may be combined to form closed loop linkages with this coupler motion. In the remainder of this text we need auxiliary results related to the factorization of motion polynomials. Their proofs can be found in [6]: Lemma 1 (Polynomial division). If C and D are polynomials in DH[t] and the leading coefficient of D is 1, there exist polynomials Q,R DH[t] such that C = QD + R and degr < degd. Note that the computation of quotient Q and remainder R is possible by straightforward polynomial long division in a non-commutative setting. 2
3 Lemma 2 (Zeros and right factors). The dual quaternion h is a zero of the polynomial C DH[t] if and only if there exists a polynomial Q DH[t] such that C = Q(t h). The statement of Lemma 2 is less trivial than the corresponding statement for real polynomials. In particular, with C as in (3), the value of C(h) (and hence also the term zero of C ) is defined as c n h n + +c 1 h+c 0. It is not admissible to simply plug h in a factorized representation of the shape (4). With C = (t k)(t h) and h,k DH[t] we have, for example, C = t 2 (h + k)t + kh and thus C(h) = kh + kh = 0 but C(k) = hk + kh 0. Lemma 2 asserts that the usual relation between zeros linear factors holds at least for right factors. 3 Factorizations of the Darboux motion Following [3, Equation (3.4)], the general Darboux motion is given by the parametric equations X = xcosϕ ysinϕ Y = xsinϕ + ycosϕ + asinϕ Z = z + bsinϕ + c(1 cosϕ). In [5], the authors gave two types of factorizations for the motion C in Equation (6). The first type is with three linear motion polynomials (FI), the second type (FII) is with five linear motion polynomials whose product does not equal C but C times a real quadratic polynomial P. This makes an algebraic difference but does not change the kinematics: Both C and PC parameterize the same motion. Moreover, two successive linear factors in FII are identical. Hence, it gives rise to an open 4R chain which can generate the Darboux motion. In combination with the 3R chain obtained from FI we obtain a 7R linkage. In this section, we recall the construction of [5] and we give two further factorizations (FIII and FIV) of (6). Similar to FII, these factorizations also use five linear motion polynomials but give only four axes because two successive linear motion polynomials are same. Combining it with the already known 3R chain, we obtain further 7R Darboux linkages. 3.1 First factorization FI We want to find linear motion polynomials Q 1, Q 2, Q 3 such that C = Q 1 Q 2 Q 3. By Lemma 2, a necessary and sufficient condition for Q 3 = t q 3, q 3 DH, to be a right factor of C is C(q 3 ) = 0. A straightforward calculation shows that q 3 is necessarily of the shape Here, ϕ [ π, π) is the motion parameter, a, b, c are real constants and x, y, z resp. X, Y, Z are coordinates in the moving and the fixed frame. For a = 0, the motion is a vertical Darboux motion. In this paper we exclude this case and assume a 0. Using the conversion formulas between matrix and dual quaternion representation of rigid body displacements (see for example [15]), we find the polynomial parameterization C 0 = (k + cε)t 3 + (1 ε(ai ck + b))t 2 + (k ε(aj + bk))t + 1 (5) for the Darboux motion. Left-dividing this motion polynomial by the leading coefficient k + cε (this amounts to a coordinate change in the fixed frame), we arrive at C = t 3 (k ε(aj bk))t 2 +(1 ε(b+ai ck))t k+cε. (6) Our further investigations will be based on this parametric representation of the Darboux motion. Note that the primal part of C is (t 2 + 1)(t k). The presence of a real factor violates the assumptions of [6, Theorem 1] (existence of factorizations) and prevents application of Algorithm 1 (computation of factorizations) of that paper. Nonetheless, we will see below that C admits infinitely many factorizations with three linear motion polynomials. Moreover, suitable polynomial multiples of C admit factorizations as well and parameterize the same Darboux motion. This we will use for our construction of 7R Darboux linkages. q 3 = k + ε(vi + wj), v,w R. Next, we consider the quotient polynomial Q = P + εd, defined by C = QQ 3. Its primal part is P = t Thus, the motion parameterized by Q is a curvilinear translation. Since Q is quadratic and P has no real zero, the trajectories are congruent ellipses. This motion admits a factorization Q = Q 1 Q 2 of the required shape only if it is a circular translation (see [16] for a detailed proof of this statement). This puts a condition on q 3, namely v = a 1 bc, w = (2a) 1 (a 2 + b 2 c 2 ). (7) If (7) is satisfied, the remainder Q is a circular translation and can be factored in infinitely many ways as Q = Q 1 Q 2 with linear rotation polynomials Q 1, Q 2. Each pair of these factorizations correspond to a parallelogram linkage that generates the circular translation. One example of a factorization of C is where E = Q 1 = t + E bc a iε + a2 + c 2 b 2 jε bkε, 2a Q 2 = t E, Q 3 = t k + bc a iε + a2 + b 2 c 2 jε 2a 2ac a 2 + b 2 + c 2 i + In particular, we have shown (8) 2ab a 2 + b 2 + c 2 j + a2 b 2 c 2 a 2 + b 2 k. (9) + c2 3
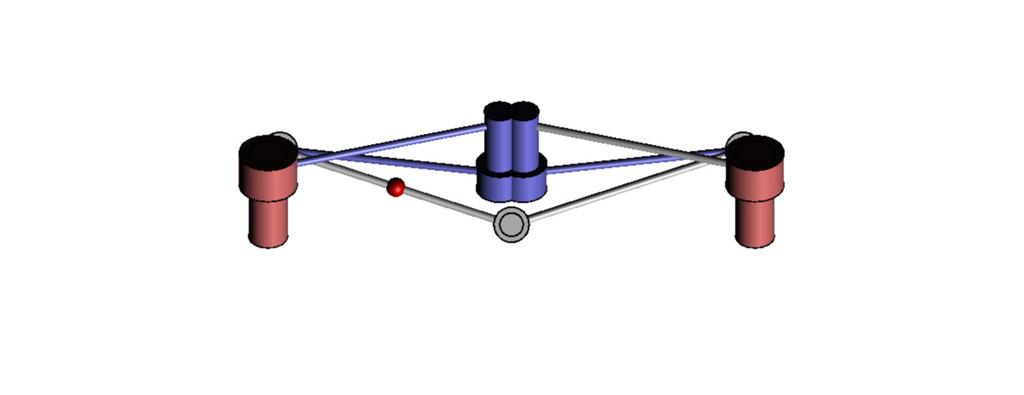
4 Proposition 3. The general Darboux motion parameterized by (6) can be decomposed into a rotation about an axis parallel to the Darboux motion s axis direction and a circular translation in a plane orthogonal to the vector quaternion D of (9). Combining two of the infinitely many factorizations with three linear factors gives a parallelogram linkage to whose coupler a dangling link (corresponding to the right factor Q 3 which is the same for all factorizations) is attached. This 6R linkage has two trivial degrees of freedom and is not particularly interesting. 3.2 Second factorization FII Now we construct a further factorization FII of the general Darboux motion. We do, however, alter the parameterization (6) and multiply it with the quadratic polynomial P := t This changes the motion polynomial but not the parameterized motion and gives additional freedom to find factorizations. In contrast to FI, we have more than three linear factors. We begin by setting the right factor to Q 4 := t k and then use polynomial division (Lemma 1) to compute C 1 = t 2 + ε(aj bk)t cεk. such that C = C 1 Q 4. The polynomial PC 1 can be written as the product of four linear motion polynomials. Again, there exist infinitely many factorizations. In order to keep the number of joints small, we choose one with identical middle factors, i.e., PC 1 = Q 7 Q 2 6 Q 5, where Q 7 = t + i + a + c 2 εj b 2 εk, Q 6 = t i, Q 5 = t + i + a c 2 εj b 2 εk. The multiplicity of the middle factor Q 6 allows us to make a 3R chain for the motion parameterized by PC 1. Together with C = Q 1 Q 2 Q 3 and Q 4, we can get a 7R linkage. It can be seen that the axes of Q 1, Q 2 are parallel, as are the axes of Q 3, Q 4 and Q 5, Q 6, Q 7. For a concrete example, a Gröbner basis computation reveals that the configuration set of this 7R linkage is one dimensional [17]. Note that its configuration curve consists of different components and only one corresponds to the Darboux motion parameterized by C. We also want to mention that the construction of the second factorization FII leaves many degrees of freedom. We just presented one factorization of this type. 3.3 Third factorization FIII In order to find a third factorization FIII that is suitable for linkage construction, we proceed in a similar fashion to case FII, multiplying the motion polynomial C of Equation (6) with P = t But we do so prior to splitting off a right factor. The polynomial PC has infinitely many factorizations into products of five linear motion polynomials, one of them being of the shape CP = Q 7 Q 6 Q 5 Q 2 4. We start by finding a suitable factor Q 4. Because Q 4 Q 4 is a factor of (CP)(CP) = P 5, we have the necessary constraint Q 4 Q 4 = P but still have infinitely many choices. We take Q 4 = t k xiε yjε with x,y R. After division of PC by (Q 4 )2 (Lemma 1), we are left with the cubic motion polynomial C 2 defined by CP = C 2 Q 2 4, i.e., C 2 = t 3 + (k + ε(aj bk + 2xi + 2yj))t 2 + (1 + ε(ai + ck + 2yi 2xj + b))t + k cε. This new cubic motion polynomial C 2 parameterizes again a Darboux motion but the parameterization is not in the standard form (6). Nonetheless, there exist again infinitely many factorizations similar to (8). For example, we have C 2 = Q 7 Q 6 Q 5 where ( b Q 2 5 = t + k + x abc 2bcy c 2 x ) T 2 + 4x 2 + x iε ( ab 2 ac 2 + 2b 2 y + 4bcx 2c 2 y + 2(T 2 + 4x 2 + a )jε, ) 2 + y Q 2(ac 2bx + 2cy) 2(ab + 2by + 2cx) 6 = t b 2 + c 2 + T 2 i + + 4x2 b 2 + c 2 + T 2 + 4x 2 j + T 2 b 2 c 2 + 4x 2 b 2 + c 2 + T 2 + 4x 2 k, Q 7 = Q 6 Sx + bct + 4x(ay + x 2 + y 2 ) T 2 + 4x 2 iε + (S + 4x2 )at + 4(ay(a(3y + a) + 2y 2 ) abcx) 2a(T 2 + 4x 2 jε ) bkε, and we abbreviated S = a 2 b 2 + c 2 and T = a + 2y. Because C = Q 1 Q 2 Q 3 and PC = C 2 Q 2 4 = Q 7 Q 6 Q 5 Q 2 4 parameterize the same motion, we can combine these two factorizations to form a 7R linkage where each rotation is defined by Q 7, Q 6, Q 5, Q 4, Q 3, Q 2, Q 1. It can be seen that the axes of Q 1, Q 2 are parallel, as are the axes of Q 3, Q 4, Q 5 and Q 7, Q 6. As revealed by a Gröbner basis computation, the configuration space of a concrete numeric example of this 7R linkage is really a curve [17]. Thus, we have indeed constructed another 7R linkage whose coupler motion is a non-vertical Darboux motion. Note that the configuration curve contains several components, not all of them rational. One component corresponds to the rational curve parameterized by C. In Figure 1, we present nine configurations (the first one and the last one are from same configuration) of this linkage in an orthographic projection parallel to k. 4
5 Q 7 Q 3 Q 2 Q 1 Q 6 Q 5 Q 4 Figure 1: The first 7R linkage generates a non-vertical Darboux motion. 5
6 3.4 Fourth factorization FIV Finally, we present an exceptional case of the 7R linkage obtained from the third factorization FIII. Among the infinitely many choices for a, b, c, x, y we choose the special case a = 1, b = 2, c = 0, x = 0, y = 0. We then have 4 Conclusions 1 = t j 3 5 k 3 jε 2kε, 2 2 = t 4 5 j k, 3 = t k jε, 4 = t k, 5 = t + k jε, 6 = t j 3 5 k, 7 = t 4 5 j k 3 jε 2kε. 2 Using factorization of motion polynomials in non-generic cases, we constructed several examples of new 7R Darboux linkages. The main idea is to find an irreducible real polynomial P and factor PC instead of C. The obtained 7R linkages generate the general (non-vertical) Darboux motion and exhibit some interesting specialities like parallel axes or circular translations as relative motions between certain links. One can replace two R-joints by other R-joints which generate same circular translations. Verifying the validity of the presented factorizations and corresponding linkages is trivial but, admittedly, we did not explain in detail how to actually find the factorizations. The factorization theory for non-generic motion polynomials, including theoretical results, algorithms and upper bounds for the number of factors, is currently being worked out. Its presentation is left to future publications. Acknowledgements We can combine this factorization to form a 7R linkage where each rotation is defined by 7, Q 6, Q 5, Q 4, Q 3, Q 2, 1. It can be seen that the axes of Q 1, Q 2, Q 7, Q 6 are References parallel, as are the axes of 3, Q 4, Q 5. Since four neighboring axes are parallel, this linkages contains a planar 4-bar linkage. Furthermore, there are two pairs of parallel 3R sub chains which give us two Sarrus linkages if we fix the remaining joint. Hence, this 7R linkage has at least two degrees of freedom. A Gröbner basis computation confirms that the configuration space is indeed two-dimensional [17]. Moreover, a decomposition of the configuration variety shows that the linkage is not kinematotropic, which means that there are components of different dimension [18]: It consists of three irreducible 2-dimensional components. Two components are rational. We do not know whether the other two-dimensional component which contains the rational curve parameterized by C is rational or not. In Figure 2, we present eleven configurations (the first one and the last one are the same) of this linkage in an orthographic projection parallel to the direction of k. Because the axes of 1, Q 2, Q 7, and Q 6 are parallel, the remaining axes are depicted as points throughout the motion. We can observe the parallelity of axes and possible singularities (intersections). The two configurations where the axes of 3 and 5 coincide give us two rational configuration sets of dimension two: A planar 4R loop (the coupler motion is a circular translation) and a single rotation rational component. None of these two contains the Darboux motion. This research was supported by the Austrian Science Fund (FWF): P (Algebraic Methods in Kinematics: Motion Factorisation and Bond Theory). [1] Darboux G. Sur le déplacement d une figure invariable. Comptes rendus de l Académie des sciences, pp , [2] Blaschke W. Zur Kinematik. Abh. Math. Sem. Univ. Hamburg, 22(1): , [3] Bottema O. and Roth B. Theoretical Kinematics. Dover Publications, [4] Lee C.C. and Hervé J.M. On the vertical Darboux motion. In J. Lenarcic and M.L. Husty, eds., Latest Advances in Robot Kinematics, pp Springer, [5] Li Z., Schicho J., and Schröcker H.P. Spatial straight line linkages by factorization of motion polynomials. Submitted for publication, [6] Hegedüs G., Schicho J., and Schröcker H.P. Factorization of rational curves in the Study quadric and revolute linkages. Mech. Mach. Theory, 69(1): , [7] Hegedüs G., Schicho J., and Schröcker H.P. Four-pose synthesis of angle-symmetric 6R linkages. ASME J. Mechanisms Robotics, 7(4), [8] Li Z. and Schicho J. Classification of angle-symmetric 6R linkages. Mechanism and Machine Theory, 70: , [9] Li Z. and Schicho J. Three types of parallel 6R linkages. In F. Thomas and A. Perez Gracia, eds., Computational Kinematics, volume 15 of Mechanisms and 6



7 3 = Q 5 3 = Q 5 Figure 2: The second 7R linkage generates a non-vertical Darboux motion. 7
8 Machine Science, pp Springer Netherlands, ISBN [10] Gallet M., Koutschan C., Li Z., Regensburger G., Schicho J., and Villamizar N. Planar linkages following a prescribed motion. Submitted for publication, arxiv.org/abs/ [11] Li Z., Schicho J., and Schröcker H.P. Factorization of motion polynomials, feb arxiv.org/abs/ [12] Li Z., Schicho J., and Schröcker H.P. Rational motions of minimal dual quaternion degree to a given trajectory. In preparation, [13] McCarthy J.M. An Introduction to Theoretical Kinematics. MIT Press, Cambridge, Massachusetts, London, England, [14] Selig J. Geometric Fundamentals of Robotics. Monographs in Computer Science. Springer, 2 edition, [15] Husty M. and Schröcker H.P. Kinematics and algebraic geometry. In J.M. McCarthy, ed., 21st Century Kinematics. The 2012 NSF Workshop, pp Springer, [16] Li Z., Rad T.D., Schicho J., and Schröcker H.P. Factorisation of rational motions: A survey with examples and applications. In: Proceedings of the 14th World Congress in Mechanism and Machine Science, Taipei, [17] softwares/7rdlinkages.html [18] Galletti C. and Fanghella P. Singleloop kinematotropic mechanisms. Mechanism and Machine Theory, 36: ,
arxiv: v2 [cs.ro] 29 Jun 2015
![arxiv: v2 [cs.ro] 29 Jun 2015](/thumbs/74/69907365.jpg "arxiv: v2 [cs.ro] 29 Jun 2015") Factorisation of Rational Motions: A Survey with Examples and Applications Z. Li RICAM Austrian Academy of Sciences Linz, Austria T.-D. Rad Unit Geometry and CAD University of Innsbruck Innsbruck, Austria
Factorisation of Rational Motions: A Survey with Examples and Applications Z. Li RICAM Austrian Academy of Sciences Linz, Austria T.-D. Rad Unit Geometry and CAD University of Innsbruck Innsbruck, Austria
Spatial straight line linkages by factorization of motion polynomials
 Spatial straight line linkages by factorization of motion polynomials Zijia Li Josef Schicho Hans-Peter Schröcker October 14, 2014 arxiv:1410.2752v2 [math.mg] 13 Oct 2014 Abstract We use the recently introduced
Spatial straight line linkages by factorization of motion polynomials Zijia Li Josef Schicho Hans-Peter Schröcker October 14, 2014 arxiv:1410.2752v2 [math.mg] 13 Oct 2014 Abstract We use the recently introduced
Three Types of Parallel 6R Linkages
 PDFaid.Com #1 Pdf Solutions Three Types of Parallel 6R Linkages Zijia Li and Josef Schicho Abstract In this paper, we consider a special kind of overconstrained 6R closed linkages which we call parallel
PDFaid.Com #1 Pdf Solutions Three Types of Parallel 6R Linkages Zijia Li and Josef Schicho Abstract In this paper, we consider a special kind of overconstrained 6R closed linkages which we call parallel
Factorization of Rational Curves in the Study Quadric and Revolute Linkages
 Factorization of Rational Curves in the Study Quadric and Revolute Linkages Gabor Hegedüs, Josef Schicho, and Hans-Peter Schröcker May 10, 2012 arxiv:1202.0139v4 [math.ra] 9 May 2012 Given a generic rational
Factorization of Rational Curves in the Study Quadric and Revolute Linkages Gabor Hegedüs, Josef Schicho, and Hans-Peter Schröcker May 10, 2012 arxiv:1202.0139v4 [math.ra] 9 May 2012 Given a generic rational
arxiv: v1 [cs.sc] 26 Feb 2015
![arxiv: v1 [cs.sc] 26 Feb 2015](/thumbs/90/103024530.jpg "arxiv: v1 [cs.sc] 26 Feb 2015") Factorization of Motion Polynomials Zijia Li a,, Josef Schicho b, Hans-Peter Schröcker c arxiv:1502.07600v1 [cs.sc] 26 Feb 2015 a Johann Radon Institute for Computational and Applied Mathematics (RICAM),
Factorization of Motion Polynomials Zijia Li a,, Josef Schicho b, Hans-Peter Schröcker c arxiv:1502.07600v1 [cs.sc] 26 Feb 2015 a Johann Radon Institute for Computational and Applied Mathematics (RICAM),
arxiv: v1 [cs.ro] 19 Sep 2013
![arxiv: v1 [cs.ro] 19 Sep 2013](/thumbs/92/110972236.jpg "arxiv: v1 [cs.ro] 19 Sep 2013") Four-Pose Synthesis of Angle-Symmetric 6R Linkages Gábor Hegedüs Applied Mathematical Institute, Antal Bejczy Center for Intelligent Robotics, Obuda University hegedus.gabor@nik.uni-obuda.hu Josef Schicho
Four-Pose Synthesis of Angle-Symmetric 6R Linkages Gábor Hegedüs Applied Mathematical Institute, Antal Bejczy Center for Intelligent Robotics, Obuda University hegedus.gabor@nik.uni-obuda.hu Josef Schicho
arxiv: v1 [math.mg] 14 Jun 2017
![arxiv: v1 [math.mg] 14 Jun 2017](/thumbs/75/71767664.jpg "arxiv: v1 [math.mg] 14 Jun 2017") FROM TO B: NEW METHODS TO INTERPOLTE TWO POSES HNS-PETER SCHRÖCKER arxiv:1706.04539v1 [math.mg] 14 Jun 2017 BSTRCT. We present two methods to interpolate between two given rigid body displacements. Both
FROM TO B: NEW METHODS TO INTERPOLTE TWO POSES HNS-PETER SCHRÖCKER arxiv:1706.04539v1 [math.mg] 14 Jun 2017 BSTRCT. We present two methods to interpolate between two given rigid body displacements. Both
Planar Stewart Gough platforms with quadratic singularity surface
 Planar Stewart Gough platforms with quadratic singularity surface B. Aigner 1 and G. Nawratil 2 Institute of Discrete Mathematics and Geometry, Vienna University of Technology, Austria, 1 e-mail: bernd.aigner@gmx.at,
Planar Stewart Gough platforms with quadratic singularity surface B. Aigner 1 and G. Nawratil 2 Institute of Discrete Mathematics and Geometry, Vienna University of Technology, Austria, 1 e-mail: bernd.aigner@gmx.at,
Basic result on type II DM self-motions of planar Stewart Gough platforms
 Basic result on type II DM self-motions of planar Stewart Gough platforms Georg Nawratil Institute of Discrete Mathematics and Geometry Research was supported by FWF (I 408-N13) 1st Workshop on Mechanisms,
Basic result on type II DM self-motions of planar Stewart Gough platforms Georg Nawratil Institute of Discrete Mathematics and Geometry Research was supported by FWF (I 408-N13) 1st Workshop on Mechanisms,
Constructing Linkages for Drawing Plane Curves
 Constructing Linkages for Drawing Plane Curves Christoph Koutschan (joint work with Matteo Gallet, Zijia Li, Georg Regensburger, Josef Schicho, Nelly Villamizar) Johann Radon Institute for Computational
Constructing Linkages for Drawing Plane Curves Christoph Koutschan (joint work with Matteo Gallet, Zijia Li, Georg Regensburger, Josef Schicho, Nelly Villamizar) Johann Radon Institute for Computational
The Theory of Bonds: A New Method for the Analysis of Linkages
 The Theory of Bonds: A New Method for the Analysis of Linkages Gábor Hegedüs, Josef Schicho, and Hans-Peter Schröcker October 29, 2018 arxiv:1206.4020v5 [math.ag] 19 Jul 2013 In this paper we introduce
The Theory of Bonds: A New Method for the Analysis of Linkages Gábor Hegedüs, Josef Schicho, and Hans-Peter Schröcker October 29, 2018 arxiv:1206.4020v5 [math.ag] 19 Jul 2013 In this paper we introduce
Congruent Stewart Gough platforms with non-translational self-motions
 Congruent Stewart Gough platforms with non-translational self-motions Georg Nawratil Institute of Discrete Mathematics and Geometry Funded by FWF (I 408-N13 and P 24927-N25) ICGG, August 4 8 2014, Innsbruck,
Congruent Stewart Gough platforms with non-translational self-motions Georg Nawratil Institute of Discrete Mathematics and Geometry Funded by FWF (I 408-N13 and P 24927-N25) ICGG, August 4 8 2014, Innsbruck,
arxiv: v3 [math.ra] 24 Jul 2018
![arxiv: v3 [math.ra] 24 Jul 2018](/thumbs/84/89570178.jpg "arxiv: v3 [math.ra] 24 Jul 2018") FACTORIZATION OF LEFT POLYNOMIALS IN ASSOCIATIVE REAL ALGEBRAS: STATE OF THE ART, APPLICATIONS, AND OPEN QUESTIONS arxiv:1803.06194v3 [math.ra] 24 Jul 2018 ZIJIA LI, DANIEL F. SCHARLER, AND HANS-PETER
FACTORIZATION OF LEFT POLYNOMIALS IN ASSOCIATIVE REAL ALGEBRAS: STATE OF THE ART, APPLICATIONS, AND OPEN QUESTIONS arxiv:1803.06194v3 [math.ra] 24 Jul 2018 ZIJIA LI, DANIEL F. SCHARLER, AND HANS-PETER
Symbolic-Algebraic Methods for Linear Partial Differential Operators (LPDOs) RISC Research Institute for Symbolic Computation
 RISC Research Institute for Symbolic Computation") Symbolic-Algebraic Methods for Linear Partial Differential Operators (LPDOs) Franz Winkler joint with Ekaterina Shemyakova RISC Research Institute for Symbolic Computation Johannes Kepler Universität.
Symbolic-Algebraic Methods for Linear Partial Differential Operators (LPDOs) Franz Winkler joint with Ekaterina Shemyakova RISC Research Institute for Symbolic Computation Johannes Kepler Universität.
Kinematic Analysis of a Pentapod Robot
 Journal for Geometry and Graphics Volume 10 (2006), No. 2, 173 182. Kinematic Analysis of a Pentapod Robot Gert F. Bär and Gunter Weiß Dresden University of Technology Institute for Geometry, D-01062 Dresden,
Journal for Geometry and Graphics Volume 10 (2006), No. 2, 173 182. Kinematic Analysis of a Pentapod Robot Gert F. Bär and Gunter Weiß Dresden University of Technology Institute for Geometry, D-01062 Dresden,
Results on Planar Parallel Manipulators with Cylindrical Singularity Surface
 Results on Planar Parallel Manipulators with Cylindrical Singularity Surface Georg Nawratil Institute of Discrete Mathematics and Geometry Differential Geometry and Geometric Structures 11th International
Results on Planar Parallel Manipulators with Cylindrical Singularity Surface Georg Nawratil Institute of Discrete Mathematics and Geometry Differential Geometry and Geometric Structures 11th International
Exponential and Cayley maps for Dual Quaternions
 Exponential and Cayley maps for Dual Quaternions J.M. Selig Abstract. In this work various maps between the space of twists and the space of finite screws are studied. Dual quaternions can be used to represent
Exponential and Cayley maps for Dual Quaternions J.M. Selig Abstract. In this work various maps between the space of twists and the space of finite screws are studied. Dual quaternions can be used to represent
2. Preliminaries. x 2 + y 2 + z 2 = a 2 ( 1 )
") x 2 + y 2 + z 2 = a 2 ( 1 ) V. Kumar 2. Preliminaries 2.1 Homogeneous coordinates When writing algebraic equations for such geometric objects as planes and circles, we are used to writing equations that
x 2 + y 2 + z 2 = a 2 ( 1 ) V. Kumar 2. Preliminaries 2.1 Homogeneous coordinates When writing algebraic equations for such geometric objects as planes and circles, we are used to writing equations that
Fundamentals of Quaternionic Kinematics in Euclidean 4-Space
 Fundamentals of Quaternionic Kinematics in Euclidean 4-Space Georg Nawratil Institute of Discrete Mathematics and Geometry Funded by FWF Project Grant No. P24927-N25 CGTA, June 8 12 2015, Kefermarkt, Austria
Fundamentals of Quaternionic Kinematics in Euclidean 4-Space Georg Nawratil Institute of Discrete Mathematics and Geometry Funded by FWF Project Grant No. P24927-N25 CGTA, June 8 12 2015, Kefermarkt, Austria
Screw Theory and its Applications in Robotics
 Screw Theory and its Applications in Robotics Marco Carricato Group of Robotics, Automation and Biomechanics University of Bologna Italy IFAC 2017 World Congress, Toulouse, France Table of Contents 1.
Screw Theory and its Applications in Robotics Marco Carricato Group of Robotics, Automation and Biomechanics University of Bologna Italy IFAC 2017 World Congress, Toulouse, France Table of Contents 1.
Planar Linkages Following a Prescribed Motion
 www.oeaw.ac.at Planar Linkages Following a Prescribed Motion M. Gallet, C. Koutschan, Z. Li, G. Regensburger, J. Schicho, N. Villamizar RICAM-Report 2015-03 www.ricam.oeaw.ac.at PLANAR LINKAGES FOLLOWING
www.oeaw.ac.at Planar Linkages Following a Prescribed Motion M. Gallet, C. Koutschan, Z. Li, G. Regensburger, J. Schicho, N. Villamizar RICAM-Report 2015-03 www.ricam.oeaw.ac.at PLANAR LINKAGES FOLLOWING
MA 323 Geometric Modelling Course Notes: Day 07 Parabolic Arcs
 MA 323 Geometric Modelling Course Notes: Day 07 Parabolic Arcs David L. Finn December 9th, 2004 We now start considering the basic curve elements to be used throughout this course; polynomial curves and
MA 323 Geometric Modelling Course Notes: Day 07 Parabolic Arcs David L. Finn December 9th, 2004 We now start considering the basic curve elements to be used throughout this course; polynomial curves and
Dimensional Synthesis of Bennett Linkages
 Dimensional Synthesis of Bennett Linkages DETC 00 000 ASME Design Engineering Technical Conferences 10-13 September 000 Baltimore, Maryland, USA Alba Perez (maperez@uci.edu), J. M. McCarthy (jmmccart@uci.edu)
Dimensional Synthesis of Bennett Linkages DETC 00 000 ASME Design Engineering Technical Conferences 10-13 September 000 Baltimore, Maryland, USA Alba Perez (maperez@uci.edu), J. M. McCarthy (jmmccart@uci.edu)
DYNAMICS OF PARALLEL MANIPULATOR
 DYNAMICS OF PARALLEL MANIPULATOR PARALLEL MANIPULATORS 6-degree of Freedom Flight Simulator BACKGROUND Platform-type parallel mechanisms 6-DOF MANIPULATORS INTRODUCTION Under alternative robotic mechanical
DYNAMICS OF PARALLEL MANIPULATOR PARALLEL MANIPULATORS 6-degree of Freedom Flight Simulator BACKGROUND Platform-type parallel mechanisms 6-DOF MANIPULATORS INTRODUCTION Under alternative robotic mechanical
MECH 576 Geometry in Mechanics November 30, 2009 Kinematics of Clavel s Delta Robot
 MECH 576 Geometry in Mechanics November 3, 29 Kinematics of Clavel s Delta Robot The DELTA Robot DELTA, a three dimensional translational manipulator, appears below in Fig.. Figure : Symmetrical (Conventional)
MECH 576 Geometry in Mechanics November 3, 29 Kinematics of Clavel s Delta Robot The DELTA Robot DELTA, a three dimensional translational manipulator, appears below in Fig.. Figure : Symmetrical (Conventional)
Differential Kinematics
 Differential Kinematics Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space (e.g., Cartesian space) Instantaneous velocity mappings can be obtained through
Differential Kinematics Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space (e.g., Cartesian space) Instantaneous velocity mappings can be obtained through
Polynomial functions on subsets of non-commutative rings a link between ringsets and null-ideal sets
 Polynomial functions on subsets of non-commutative rings a lin between ringsets and null-ideal sets Sophie Frisch 1, 1 Institut für Analysis und Zahlentheorie, Technische Universität Graz, Koperniusgasse
Polynomial functions on subsets of non-commutative rings a lin between ringsets and null-ideal sets Sophie Frisch 1, 1 Institut für Analysis und Zahlentheorie, Technische Universität Graz, Koperniusgasse
Roots and Coefficients Polynomials Preliminary Maths Extension 1
 Preliminary Maths Extension Question If, and are the roots of x 5x x 0, find the following. (d) (e) Question If p, q and r are the roots of x x x 4 0, evaluate the following. pq r pq qr rp p q q r r p
Preliminary Maths Extension Question If, and are the roots of x 5x x 0, find the following. (d) (e) Question If p, q and r are the roots of x x x 4 0, evaluate the following. pq r pq qr rp p q q r r p
CHAPTER 0 PRELIMINARY MATERIAL. Paul Vojta. University of California, Berkeley. 18 February 1998
 CHAPTER 0 PRELIMINARY MATERIAL Paul Vojta University of California, Berkeley 18 February 1998 This chapter gives some preliminary material on number theory and algebraic geometry. Section 1 gives basic
CHAPTER 0 PRELIMINARY MATERIAL Paul Vojta University of California, Berkeley 18 February 1998 This chapter gives some preliminary material on number theory and algebraic geometry. Section 1 gives basic
Partial Fractions. Prerequisites: Solving simple equations; comparing coefficients; factorising simple quadratics and cubics; polynomial division.
 Prerequisites: olving simple equations; comparing coefficients; factorising simple quadratics and cubics; polynomial division. Maths Applications: Integration; graph sketching. Real-World Applications:
Prerequisites: olving simple equations; comparing coefficients; factorising simple quadratics and cubics; polynomial division. Maths Applications: Integration; graph sketching. Real-World Applications:
MAKSYM FEDORCHUK. n ) = z1 d 1 zn d 1.
 = z1 d 1 zn d 1.") DIRECT SUM DECOMPOSABILITY OF SMOOTH POLYNOMIALS AND FACTORIZATION OF ASSOCIATED FORMS MAKSYM FEDORCHUK Abstract. We prove an if-and-only-if criterion for direct sum decomposability of a smooth homogeneous
DIRECT SUM DECOMPOSABILITY OF SMOOTH POLYNOMIALS AND FACTORIZATION OF ASSOCIATED FORMS MAKSYM FEDORCHUK Abstract. We prove an if-and-only-if criterion for direct sum decomposability of a smooth homogeneous
Plane quartics and. Dedicated to Professor S. Koizumi for his 70th birthday. by Tetsuji Shioda
 Plane quartics and Mordell-Weil lattices of type E 7 Dedicated to Professor S. Koizumi for his 70th birthday by Tetsuji Shioda Department of Mathematics, Rikkyo University Nishi-Ikebukuro,Tokyo 171, Japan
Plane quartics and Mordell-Weil lattices of type E 7 Dedicated to Professor S. Koizumi for his 70th birthday by Tetsuji Shioda Department of Mathematics, Rikkyo University Nishi-Ikebukuro,Tokyo 171, Japan
COMPUTER ARITHMETIC. 13/05/2010 cryptography - math background pp. 1 / 162
 COMPUTER ARITHMETIC 13/05/2010 cryptography - math background pp. 1 / 162 RECALL OF COMPUTER ARITHMETIC computers implement some types of arithmetic for instance, addition, subtratction, multiplication
COMPUTER ARITHMETIC 13/05/2010 cryptography - math background pp. 1 / 162 RECALL OF COMPUTER ARITHMETIC computers implement some types of arithmetic for instance, addition, subtratction, multiplication
ADVANCED TOPICS IN ALGEBRAIC GEOMETRY
 ADVANCED TOPICS IN ALGEBRAIC GEOMETRY DAVID WHITE Outline of talk: My goal is to introduce a few more advanced topics in algebraic geometry but not to go into too much detail. This will be a survey of
ADVANCED TOPICS IN ALGEBRAIC GEOMETRY DAVID WHITE Outline of talk: My goal is to introduce a few more advanced topics in algebraic geometry but not to go into too much detail. This will be a survey of
Linear Algebra- Final Exam Review
 Linear Algebra- Final Exam Review. Let A be invertible. Show that, if v, v, v 3 are linearly independent vectors, so are Av, Av, Av 3. NOTE: It should be clear from your answer that you know the definition.
Linear Algebra- Final Exam Review. Let A be invertible. Show that, if v, v, v 3 are linearly independent vectors, so are Av, Av, Av 3. NOTE: It should be clear from your answer that you know the definition.
Introduction to Arithmetic Geometry Fall 2013 Lecture #23 11/26/2013
 18.782 Introduction to Arithmetic Geometry Fall 2013 Lecture #23 11/26/2013 As usual, a curve is a smooth projective (geometrically irreducible) variety of dimension one and k is a perfect field. 23.1
18.782 Introduction to Arithmetic Geometry Fall 2013 Lecture #23 11/26/2013 As usual, a curve is a smooth projective (geometrically irreducible) variety of dimension one and k is a perfect field. 23.1
MECH 576 Geometry in Mechanics September 16, 2009 Using Line Geometry
 MECH 576 Geometry in Mechanics September 16, 2009 Using Line Geometry 1 Deriving Equations in Line Coordinates Four exercises in deriving fundamental geometric equations with line coordinates will be conducted.
MECH 576 Geometry in Mechanics September 16, 2009 Using Line Geometry 1 Deriving Equations in Line Coordinates Four exercises in deriving fundamental geometric equations with line coordinates will be conducted.
8 Velocity Kinematics
 8 Velocity Kinematics Velocity analysis of a robot is divided into forward and inverse velocity kinematics. Having the time rate of joint variables and determination of the Cartesian velocity of end-effector
8 Velocity Kinematics Velocity analysis of a robot is divided into forward and inverse velocity kinematics. Having the time rate of joint variables and determination of the Cartesian velocity of end-effector
Complex numbers, the exponential function, and factorization over C
 Complex numbers, the exponential function, and factorization over C 1 Complex Numbers Recall that for every non-zero real number x, its square x 2 = x x is always positive. Consequently, R does not contain
Complex numbers, the exponential function, and factorization over C 1 Complex Numbers Recall that for every non-zero real number x, its square x 2 = x x is always positive. Consequently, R does not contain
ELLIPTIC CURVES BJORN POONEN
 ELLIPTIC CURVES BJORN POONEN 1. Introduction The theme of this lecture is to show how geometry can be used to understand the rational number solutions to a polynomial equation. We will illustrate this
ELLIPTIC CURVES BJORN POONEN 1. Introduction The theme of this lecture is to show how geometry can be used to understand the rational number solutions to a polynomial equation. We will illustrate this
Section III.6. Factorization in Polynomial Rings
 III.6. Factorization in Polynomial Rings 1 Section III.6. Factorization in Polynomial Rings Note. We push several of the results in Section III.3 (such as divisibility, irreducibility, and unique factorization)
III.6. Factorization in Polynomial Rings 1 Section III.6. Factorization in Polynomial Rings Note. We push several of the results in Section III.3 (such as divisibility, irreducibility, and unique factorization)
HASSE-MINKOWSKI THEOREM
 HASSE-MINKOWSKI THEOREM KIM, SUNGJIN 1. Introduction In rough terms, a local-global principle is a statement that asserts that a certain property is true globally if and only if it is true everywhere locally.
HASSE-MINKOWSKI THEOREM KIM, SUNGJIN 1. Introduction In rough terms, a local-global principle is a statement that asserts that a certain property is true globally if and only if it is true everywhere locally.
POLYNOMIALS. x + 1 x x 4 + x 3. x x 3 x 2. x x 2 + x. x + 1 x 1
 POLYNOMIALS A polynomial in x is an expression of the form p(x) = a 0 + a 1 x + a x +. + a n x n Where a 0, a 1, a. a n are real numbers and n is a non-negative integer and a n 0. A polynomial having only
POLYNOMIALS A polynomial in x is an expression of the form p(x) = a 0 + a 1 x + a x +. + a n x n Where a 0, a 1, a. a n are real numbers and n is a non-negative integer and a n 0. A polynomial having only
arxiv: v1 [math.dg] 16 Oct 2010
![arxiv: v1 [math.dg] 16 Oct 2010](/thumbs/88/117567102.jpg "arxiv: v1 [math.dg] 16 Oct 2010") THE BÄCKLUND TRANSFORM OF PRINCIPAL CONTACT ELEMENT NETS HANS-PETER SCHRÖCKER arxiv:1010.3339v1 [math.dg] 16 Oct 2010 Abstract. We investigate geometric aspects of the the Bäcklund transform of principal
THE BÄCKLUND TRANSFORM OF PRINCIPAL CONTACT ELEMENT NETS HANS-PETER SCHRÖCKER arxiv:1010.3339v1 [math.dg] 16 Oct 2010 Abstract. We investigate geometric aspects of the the Bäcklund transform of principal
How might we evaluate this? Suppose that, by some good luck, we knew that. x 2 5. x 2 dx 5
 8.4 1 8.4 Partial Fractions Consider the following integral. 13 2x (1) x 2 x 2 dx How might we evaluate this? Suppose that, by some good luck, we knew that 13 2x (2) x 2 x 2 = 3 x 2 5 x + 1 We could then
8.4 1 8.4 Partial Fractions Consider the following integral. 13 2x (1) x 2 x 2 dx How might we evaluate this? Suppose that, by some good luck, we knew that 13 2x (2) x 2 x 2 = 3 x 2 5 x + 1 We could then
PURE MATHEMATICS AM 27
 AM SYLLABUS (2020) PURE MATHEMATICS AM 27 SYLLABUS 1 Pure Mathematics AM 27 (Available in September ) Syllabus Paper I(3hrs)+Paper II(3hrs) 1. AIMS To prepare students for further studies in Mathematics
AM SYLLABUS (2020) PURE MATHEMATICS AM 27 SYLLABUS 1 Pure Mathematics AM 27 (Available in September ) Syllabus Paper I(3hrs)+Paper II(3hrs) 1. AIMS To prepare students for further studies in Mathematics
Partial Fractions. Combining fractions over a common denominator is a familiar operation from algebra: 2 x 3 + 3
 Partial Fractions Combining fractions over a common denominator is a familiar operation from algebra: x 3 + 3 x + x + 3x 7 () x 3 3x + x 3 From the standpoint of integration, the left side of Equation
Partial Fractions Combining fractions over a common denominator is a familiar operation from algebra: x 3 + 3 x + x + 3x 7 () x 3 3x + x 3 From the standpoint of integration, the left side of Equation
Lie Algebra of Unit Tangent Bundle in Minkowski 3-Space
 INTERNATIONAL ELECTRONIC JOURNAL OF GEOMETRY VOLUME 12 NO. 1 PAGE 1 (2019) Lie Algebra of Unit Tangent Bundle in Minkowski 3-Space Murat Bekar (Communicated by Levent Kula ) ABSTRACT In this paper, a one-to-one
INTERNATIONAL ELECTRONIC JOURNAL OF GEOMETRY VOLUME 12 NO. 1 PAGE 1 (2019) Lie Algebra of Unit Tangent Bundle in Minkowski 3-Space Murat Bekar (Communicated by Levent Kula ) ABSTRACT In this paper, a one-to-one
MATH PROBLEM SET 6
 MATH 431-2018 PROBLEM SET 6 DECEMBER 2, 2018 DUE TUESDAY 11 DECEMBER 2018 1. Rotations and quaternions Consider the line l through p 0 := (1, 0, 0) and parallel to the vector v := 1 1, 1 that is, defined
MATH 431-2018 PROBLEM SET 6 DECEMBER 2, 2018 DUE TUESDAY 11 DECEMBER 2018 1. Rotations and quaternions Consider the line l through p 0 := (1, 0, 0) and parallel to the vector v := 1 1, 1 that is, defined
From Wikipedia, the free encyclopedia
 1 of 8 27/03/2013 12:41 Quadratic form From Wikipedia, the free encyclopedia In mathematics, a quadratic form is a homogeneous polynomial of degree two in a number of variables. For example, is a quadratic
1 of 8 27/03/2013 12:41 Quadratic form From Wikipedia, the free encyclopedia In mathematics, a quadratic form is a homogeneous polynomial of degree two in a number of variables. For example, is a quadratic
Position and orientation of rigid bodies
 Robotics 1 Position and orientation of rigid bodies Prof. Alessandro De Luca Robotics 1 1 Position and orientation right-handed orthogonal Reference Frames RF A A p AB B RF B rigid body position: A p AB
Robotics 1 Position and orientation of rigid bodies Prof. Alessandro De Luca Robotics 1 1 Position and orientation right-handed orthogonal Reference Frames RF A A p AB B RF B rigid body position: A p AB
Integration of Rational Functions by Partial Fractions
 Integration of Rational Functions by Partial Fractions Part 2: Integrating Rational Functions Rational Functions Recall that a rational function is the quotient of two polynomials. x + 3 x + 2 x + 2 x
Integration of Rational Functions by Partial Fractions Part 2: Integrating Rational Functions Rational Functions Recall that a rational function is the quotient of two polynomials. x + 3 x + 2 x + 2 x
Geometric Lagrange Interpolation by Planar Cubic Pythagorean-hodograph Curves
 Geometric Lagrange Interpolation by Planar Cubic Pythagorean-hodograph Curves Gašper Jaklič a,c, Jernej Kozak a,b, Marjeta Krajnc b, Vito Vitrih c, Emil Žagar a,b, a FMF, University of Ljubljana, Jadranska
Geometric Lagrange Interpolation by Planar Cubic Pythagorean-hodograph Curves Gašper Jaklič a,c, Jernej Kozak a,b, Marjeta Krajnc b, Vito Vitrih c, Emil Žagar a,b, a FMF, University of Ljubljana, Jadranska
Canonical systems of basic invariants for unitary reflection groups
 Canonical systems of basic invariants for unitary reflection groups Norihiro Nakashima, Hiroaki Terao and Shuhei Tsujie Abstract It has been known that there exists a canonical system for every finite
Canonical systems of basic invariants for unitary reflection groups Norihiro Nakashima, Hiroaki Terao and Shuhei Tsujie Abstract It has been known that there exists a canonical system for every finite
Necessary conditions for type II DM self-motions of planar Stewart Gough platforms
 Journal for Geometry and Graphics Volume VOL (YEAR), No. NO, 1 12. Necessary conditions for type II DM self-motions of planar Stewart Gough platforms Georg Nawratil Institute of Discrete Mathematics and
Journal for Geometry and Graphics Volume VOL (YEAR), No. NO, 1 12. Necessary conditions for type II DM self-motions of planar Stewart Gough platforms Georg Nawratil Institute of Discrete Mathematics and
12. Hilbert Polynomials and Bézout s Theorem
 12. Hilbert Polynomials and Bézout s Theorem 95 12. Hilbert Polynomials and Bézout s Theorem After our study of smooth cubic surfaces in the last chapter, let us now come back to the general theory of
12. Hilbert Polynomials and Bézout s Theorem 95 12. Hilbert Polynomials and Bézout s Theorem After our study of smooth cubic surfaces in the last chapter, let us now come back to the general theory of
Applications of dual quaternions to kinematics
 Anwendung dualer Quaternionen auf Kinematik, Annales Academiae Scientiarum Fennicae (1958), 1-13; Gesammelte Werke, v. 2. Applications of dual quaternions to kinematics By: W. Blaschke Translated by: D.
Anwendung dualer Quaternionen auf Kinematik, Annales Academiae Scientiarum Fennicae (1958), 1-13; Gesammelte Werke, v. 2. Applications of dual quaternions to kinematics By: W. Blaschke Translated by: D.
Core Mathematics 2 Algebra
 Core Mathematics 2 Algebra Edited by: K V Kumaran Email: kvkumaran@gmail.com Core Mathematics 2 Algebra 1 Algebra and functions Simple algebraic division; use of the Factor Theorem and the Remainder Theorem.
Core Mathematics 2 Algebra Edited by: K V Kumaran Email: kvkumaran@gmail.com Core Mathematics 2 Algebra 1 Algebra and functions Simple algebraic division; use of the Factor Theorem and the Remainder Theorem.
NONCOMMUTATIVE POLYNOMIAL EQUATIONS. Edward S. Letzter. Introduction
 NONCOMMUTATIVE POLYNOMIAL EQUATIONS Edward S Letzter Introduction My aim in these notes is twofold: First, to briefly review some linear algebra Second, to provide you with some new tools and techniques
NONCOMMUTATIVE POLYNOMIAL EQUATIONS Edward S Letzter Introduction My aim in these notes is twofold: First, to briefly review some linear algebra Second, to provide you with some new tools and techniques
CONTINUED FRACTIONS AND THE SECOND KEPLER LAW
 CONTINUED FRACTIONS AND THE SECOND KEPLER LAW OLEG KARPENKOV Abstract. In this paper we introduce a link between geometry of ordinary continued fractions and trajectories of points that moves according
CONTINUED FRACTIONS AND THE SECOND KEPLER LAW OLEG KARPENKOV Abstract. In this paper we introduce a link between geometry of ordinary continued fractions and trajectories of points that moves according
Characterizing planar polynomial vector fields with an elementary first integral
 Characterizing planar polynomial vector fields with an elementary first integral Sebastian Walcher (Joint work with Jaume Llibre and Chara Pantazi) Lleida, September 2016 The topic Ultimate goal: Understand
Characterizing planar polynomial vector fields with an elementary first integral Sebastian Walcher (Joint work with Jaume Llibre and Chara Pantazi) Lleida, September 2016 The topic Ultimate goal: Understand
Reconfiguration analysis of a 4-RUU parallel manipulator
 Reconfiguration analysis of a 4-RUU parallel manipulator Latifah Nurahmi, Stéphane Caro, Philippe Wenger, Josef Schadlbauer, Manfred Husty To cite this version: Latifah Nurahmi, Stéphane Caro, Philippe
Reconfiguration analysis of a 4-RUU parallel manipulator Latifah Nurahmi, Stéphane Caro, Philippe Wenger, Josef Schadlbauer, Manfred Husty To cite this version: Latifah Nurahmi, Stéphane Caro, Philippe
Lecture D16-2D Rigid Body Kinematics
 J. Peraire 16.07 Dynamics Fall 2004 Version 1.2 Lecture D16-2D Rigid Body Kinematics In this lecture, we will start from the general relative motion concepts introduced in lectures D11 and D12, and then
J. Peraire 16.07 Dynamics Fall 2004 Version 1.2 Lecture D16-2D Rigid Body Kinematics In this lecture, we will start from the general relative motion concepts introduced in lectures D11 and D12, and then
Kinematics. Chapter Multi-Body Systems
 Chapter 2 Kinematics This chapter first introduces multi-body systems in conceptual terms. It then describes the concept of a Euclidean frame in the material world, following the concept of a Euclidean
Chapter 2 Kinematics This chapter first introduces multi-body systems in conceptual terms. It then describes the concept of a Euclidean frame in the material world, following the concept of a Euclidean
ON THE APPROXIMATION TO ALGEBRAIC NUMBERS BY ALGEBRAIC NUMBERS. Yann Bugeaud Université de Strasbourg, France
 GLASNIK MATEMATIČKI Vol. 44(64)(2009), 323 331 ON THE APPROXIMATION TO ALGEBRAIC NUMBERS BY ALGEBRAIC NUMBERS Yann Bugeaud Université de Strasbourg, France Abstract. Let n be a positive integer. Let ξ
GLASNIK MATEMATIČKI Vol. 44(64)(2009), 323 331 ON THE APPROXIMATION TO ALGEBRAIC NUMBERS BY ALGEBRAIC NUMBERS Yann Bugeaud Université de Strasbourg, France Abstract. Let n be a positive integer. Let ξ
Stat 159/259: Linear Algebra Notes
 Stat 159/259: Linear Algebra Notes Jarrod Millman November 16, 2015 Abstract These notes assume you ve taken a semester of undergraduate linear algebra. In particular, I assume you are familiar with the
Stat 159/259: Linear Algebra Notes Jarrod Millman November 16, 2015 Abstract These notes assume you ve taken a semester of undergraduate linear algebra. In particular, I assume you are familiar with the
PURE MATHEMATICS AM 27
 AM Syllabus (014): Pure Mathematics AM SYLLABUS (014) PURE MATHEMATICS AM 7 SYLLABUS 1 AM Syllabus (014): Pure Mathematics Pure Mathematics AM 7 Syllabus (Available in September) Paper I(3hrs)+Paper II(3hrs)
AM Syllabus (014): Pure Mathematics AM SYLLABUS (014) PURE MATHEMATICS AM 7 SYLLABUS 1 AM Syllabus (014): Pure Mathematics Pure Mathematics AM 7 Syllabus (Available in September) Paper I(3hrs)+Paper II(3hrs)
Polynomials, Ideals, and Gröbner Bases
 Polynomials, Ideals, and Gröbner Bases Notes by Bernd Sturmfels for the lecture on April 10, 2018, in the IMPRS Ringvorlesung Introduction to Nonlinear Algebra We fix a field K. Some examples of fields
Polynomials, Ideals, and Gröbner Bases Notes by Bernd Sturmfels for the lecture on April 10, 2018, in the IMPRS Ringvorlesung Introduction to Nonlinear Algebra We fix a field K. Some examples of fields
TRIANGLE CENTERS DEFINED BY QUADRATIC POLYNOMIALS
 Math. J. Okayama Univ. 53 (2011), 185 216 TRIANGLE CENTERS DEFINED BY QUADRATIC POLYNOMIALS Yoshio Agaoka Abstract. We consider a family of triangle centers whose barycentric coordinates are given by quadratic
Math. J. Okayama Univ. 53 (2011), 185 216 TRIANGLE CENTERS DEFINED BY QUADRATIC POLYNOMIALS Yoshio Agaoka Abstract. We consider a family of triangle centers whose barycentric coordinates are given by quadratic
Linear Algebra. Preliminary Lecture Notes
 Linear Algebra Preliminary Lecture Notes Adolfo J. Rumbos c Draft date April 29, 23 2 Contents Motivation for the course 5 2 Euclidean n dimensional Space 7 2. Definition of n Dimensional Euclidean Space...........
Linear Algebra Preliminary Lecture Notes Adolfo J. Rumbos c Draft date April 29, 23 2 Contents Motivation for the course 5 2 Euclidean n dimensional Space 7 2. Definition of n Dimensional Euclidean Space...........
Course Notes Math 275 Boise State University. Shari Ultman
 Course Notes Math 275 Boise State University Shari Ultman Fall 2017 Contents 1 Vectors 1 1.1 Introduction to 3-Space & Vectors.............. 3 1.2 Working With Vectors.................... 7 1.3 Introduction
Course Notes Math 275 Boise State University Shari Ultman Fall 2017 Contents 1 Vectors 1 1.1 Introduction to 3-Space & Vectors.............. 3 1.2 Working With Vectors.................... 7 1.3 Introduction
College Algebra To learn more about all our offerings Visit Knewton.com
 College Algebra 978-1-63545-097-2 To learn more about all our offerings Visit Knewton.com Source Author(s) (Text or Video) Title(s) Link (where applicable) OpenStax Text Jay Abramson, Arizona State University
College Algebra 978-1-63545-097-2 To learn more about all our offerings Visit Knewton.com Source Author(s) (Text or Video) Title(s) Link (where applicable) OpenStax Text Jay Abramson, Arizona State University
LEGENDRE S THEOREM, LEGRANGE S DESCENT
 LEGENDRE S THEOREM, LEGRANGE S DESCENT SUPPLEMENT FOR MATH 370: NUMBER THEORY Abstract. Legendre gave simple necessary and sufficient conditions for the solvablility of the diophantine equation ax 2 +
LEGENDRE S THEOREM, LEGRANGE S DESCENT SUPPLEMENT FOR MATH 370: NUMBER THEORY Abstract. Legendre gave simple necessary and sufficient conditions for the solvablility of the diophantine equation ax 2 +
Finite Fields: An introduction through exercises Jonathan Buss Spring 2014
 Finite Fields: An introduction through exercises Jonathan Buss Spring 2014 A typical course in abstract algebra starts with groups, and then moves on to rings, vector spaces, fields, etc. This sequence
Finite Fields: An introduction through exercises Jonathan Buss Spring 2014 A typical course in abstract algebra starts with groups, and then moves on to rings, vector spaces, fields, etc. This sequence
Multidimensional Geometry and its Applications
 PARALLEL COORDINATES : VISUAL Multidimensional Geometry and its Applications Alfred Inselberg( c 99, ) Senior Fellow San Diego SuperComputing Center, CA, USA Computer Science and Applied Mathematics Departments
PARALLEL COORDINATES : VISUAL Multidimensional Geometry and its Applications Alfred Inselberg( c 99, ) Senior Fellow San Diego SuperComputing Center, CA, USA Computer Science and Applied Mathematics Departments
THE ENVELOPE OF LINES MEETING A FIXED LINE AND TANGENT TO TWO SPHERES
 6 September 2004 THE ENVELOPE OF LINES MEETING A FIXED LINE AND TANGENT TO TWO SPHERES Abstract. We study the set of lines that meet a fixed line and are tangent to two spheres and classify the configurations
6 September 2004 THE ENVELOPE OF LINES MEETING A FIXED LINE AND TANGENT TO TWO SPHERES Abstract. We study the set of lines that meet a fixed line and are tangent to two spheres and classify the configurations
Precalculus. Precalculus Higher Mathematics Courses 85
 Precalculus Precalculus combines the trigonometric, geometric, and algebraic techniques needed to prepare students for the study of calculus, and strengthens students conceptual understanding of problems
Precalculus Precalculus combines the trigonometric, geometric, and algebraic techniques needed to prepare students for the study of calculus, and strengthens students conceptual understanding of problems
Points of Ninth Order on Cubic Curves
 Rose-Hulman Undergraduate Mathematics Journal Volume 15 Issue 1 Article 1 Points of Ninth Order on Cubic Curves Leah Balay-Wilson Smith College Taylor Brysiewicz Northern Illinois University, tbrysiewicz@yahoo.com
Rose-Hulman Undergraduate Mathematics Journal Volume 15 Issue 1 Article 1 Points of Ninth Order on Cubic Curves Leah Balay-Wilson Smith College Taylor Brysiewicz Northern Illinois University, tbrysiewicz@yahoo.com
Mathematics AQA Advanced Subsidiary GCE Core 1 (MPC1) January 2010
 January 2010") Link to past paper on AQA website: http://store.aqa.org.uk/qual/gce/pdf/aqa-mpc1-w-qp-jan10.pdf These solutions are for your personal use only. DO NOT photocopy or pass on to third parties. If you are
Link to past paper on AQA website: http://store.aqa.org.uk/qual/gce/pdf/aqa-mpc1-w-qp-jan10.pdf These solutions are for your personal use only. DO NOT photocopy or pass on to third parties. If you are
Kepler s Quartic Curve as a Model of Planetary Orbits
 International Mathematical Forum, 3, 2008, no. 38, 1871-1877 Kepler s Quartic Curve as a Model of Planetary Orbits Takuma Kimura Grduate School of Science and Technology Hirosaki University, Hirosaki 036-8561,
International Mathematical Forum, 3, 2008, no. 38, 1871-1877 Kepler s Quartic Curve as a Model of Planetary Orbits Takuma Kimura Grduate School of Science and Technology Hirosaki University, Hirosaki 036-8561,
review To find the coefficient of all the terms in 15ab + 60bc 17ca: Coefficient of ab = 15 Coefficient of bc = 60 Coefficient of ca = -17
 1. Revision Recall basic terms of algebraic expressions like Variable, Constant, Term, Coefficient, Polynomial etc. The coefficients of the terms in 4x 2 5xy + 6y 2 are Coefficient of 4x 2 is 4 Coefficient
1. Revision Recall basic terms of algebraic expressions like Variable, Constant, Term, Coefficient, Polynomial etc. The coefficients of the terms in 4x 2 5xy + 6y 2 are Coefficient of 4x 2 is 4 Coefficient
Homogeneous Transformations
 Purpose: Homogeneous Transformations The purpose of this chapter is to introduce you to the Homogeneous Transformation. This simple 4 x 4 transformation is used in the geometry engines of CAD systems and
Purpose: Homogeneous Transformations The purpose of this chapter is to introduce you to the Homogeneous Transformation. This simple 4 x 4 transformation is used in the geometry engines of CAD systems and
MAC Module 5 Vectors in 2-Space and 3-Space II
 MAC 2103 Module 5 Vectors in 2-Space and 3-Space II 1 Learning Objectives Upon completing this module, you should be able to: 1. Determine the cross product of a vector in R 3. 2. Determine a scalar triple
MAC 2103 Module 5 Vectors in 2-Space and 3-Space II 1 Learning Objectives Upon completing this module, you should be able to: 1. Determine the cross product of a vector in R 3. 2. Determine a scalar triple
Main theorem on Schönflies-singular planar Stewart Gough platforms
 Main theorem on Schönflies-singular planar Stewart Gough platforms Georg Nawratil Institute of Discrete Mathematics and Geometry Differential Geometry and Geometric Structures 12th International Symposium
Main theorem on Schönflies-singular planar Stewart Gough platforms Georg Nawratil Institute of Discrete Mathematics and Geometry Differential Geometry and Geometric Structures 12th International Symposium
Minimum-Parameter Representations of N-Dimensional Principal Rotations
 Minimum-Parameter Representations of N-Dimensional Principal Rotations Andrew J. Sinclair and John E. Hurtado Department of Aerospace Engineering, Texas A&M University, College Station, Texas, USA Abstract
Minimum-Parameter Representations of N-Dimensional Principal Rotations Andrew J. Sinclair and John E. Hurtado Department of Aerospace Engineering, Texas A&M University, College Station, Texas, USA Abstract
Definition: A vector is a directed line segment which represents a displacement from one point P to another point Q.
 THE UNIVERSITY OF NEW SOUTH WALES SCHOOL OF MATHEMATICS AND STATISTICS MATH Algebra Section : - Introduction to Vectors. You may have already met the notion of a vector in physics. There you will have
THE UNIVERSITY OF NEW SOUTH WALES SCHOOL OF MATHEMATICS AND STATISTICS MATH Algebra Section : - Introduction to Vectors. You may have already met the notion of a vector in physics. There you will have
Identifying supersingular elliptic curves
 Identifying supersingular elliptic curves Andrew V. Sutherland Massachusetts Institute of Technology January 6, 2012 http://arxiv.org/abs/1107.1140 Andrew V. Sutherland (MIT) Identifying supersingular
Identifying supersingular elliptic curves Andrew V. Sutherland Massachusetts Institute of Technology January 6, 2012 http://arxiv.org/abs/1107.1140 Andrew V. Sutherland (MIT) Identifying supersingular
arxiv: v1 [math.dg] 28 Jul 2016
![arxiv: v1 [math.dg] 28 Jul 2016](/thumbs/94/121868942.jpg "arxiv: v1 [math.dg] 28 Jul 2016") Nilpotent approximation of a trident snake robot controlling distribution Jaroslav Hrdina Aleš Návrat and Petr Vašík arxiv:67.85v [math.dg] 8 Jul 6 Brno University of Technology Faculty of Mechanical Engineering
Nilpotent approximation of a trident snake robot controlling distribution Jaroslav Hrdina Aleš Návrat and Petr Vašík arxiv:67.85v [math.dg] 8 Jul 6 Brno University of Technology Faculty of Mechanical Engineering
FORMAL GROUPS OF CERTAIN Q-CURVES OVER QUADRATIC FIELDS
 Sairaiji, F. Osaka J. Math. 39 (00), 3 43 FORMAL GROUPS OF CERTAIN Q-CURVES OVER QUADRATIC FIELDS FUMIO SAIRAIJI (Received March 4, 000) 1. Introduction Let be an elliptic curve over Q. We denote by ˆ
Sairaiji, F. Osaka J. Math. 39 (00), 3 43 FORMAL GROUPS OF CERTAIN Q-CURVES OVER QUADRATIC FIELDS FUMIO SAIRAIJI (Received March 4, 000) 1. Introduction Let be an elliptic curve over Q. We denote by ˆ
Quaternions, semi-vectors, and spinors
 Quaternionen, Semivectoren, und Spinoren, Zeit. Phys. 95 (935), 337-354. Quaternions, semi-vectors, and spinors By J. Blaton in Wilno (Received on 3 April 935) Translated by D. H. Delphenich The representation
Quaternionen, Semivectoren, und Spinoren, Zeit. Phys. 95 (935), 337-354. Quaternions, semi-vectors, and spinors By J. Blaton in Wilno (Received on 3 April 935) Translated by D. H. Delphenich The representation
From discrete differential geometry to the classification of discrete integrable systems
 From discrete differential geometry to the classification of discrete integrable systems Vsevolod Adler,, Yuri Suris Technische Universität Berlin Quantum Integrable Discrete Systems, Newton Institute,
From discrete differential geometry to the classification of discrete integrable systems Vsevolod Adler,, Yuri Suris Technische Universität Berlin Quantum Integrable Discrete Systems, Newton Institute,
Example: This theorem is the easiest way to test an ideal (or an element) is prime. Z[x] (x)
![Example: This theorem is the easiest way to test an ideal (or an element) is prime. Z[x] (x)](/thumbs/96/126601816.jpg "Example: This theorem is the easiest way to test an ideal (or an element) is prime. Z[x] (x)") Math 4010/5530 Factorization Theory January 2016 Let R be an integral domain. Recall that s, t R are called associates if they differ by a unit (i.e. there is some c R such that s = ct). Let R be a commutative
Math 4010/5530 Factorization Theory January 2016 Let R be an integral domain. Recall that s, t R are called associates if they differ by a unit (i.e. there is some c R such that s = ct). Let R be a commutative
Largest Area Ellipse Inscribing an Arbitrary Convex Quadrangle
 Largest Area Ellipse Inscribing an Arbitrary Convex Quadrangle M. John D, Hayes 1, Zachary A. Copeland 1, Paul J. Zsombor-Murray 2, and Anton Gfrerrer 3 1 Carleton University, Department of Mechanical
Largest Area Ellipse Inscribing an Arbitrary Convex Quadrangle M. John D, Hayes 1, Zachary A. Copeland 1, Paul J. Zsombor-Murray 2, and Anton Gfrerrer 3 1 Carleton University, Department of Mechanical
P -adic root separation for quadratic and cubic polynomials
 P -adic root separation for quadratic and cubic polynomials Tomislav Pejković Abstract We study p-adic root separation for quadratic and cubic polynomials with integer coefficients. The quadratic and reducible
P -adic root separation for quadratic and cubic polynomials Tomislav Pejković Abstract We study p-adic root separation for quadratic and cubic polynomials with integer coefficients. The quadratic and reducible
Fast arithmetic and pairing evaluation on genus 2 curves
 Fast arithmetic and pairing evaluation on genus 2 curves David Freeman University of California, Berkeley dfreeman@math.berkeley.edu November 6, 2005 Abstract We present two algorithms for fast arithmetic
Fast arithmetic and pairing evaluation on genus 2 curves David Freeman University of California, Berkeley dfreeman@math.berkeley.edu November 6, 2005 Abstract We present two algorithms for fast arithmetic
Linear Algebra. Min Yan
 Linear Algebra Min Yan January 2, 2018 2 Contents 1 Vector Space 7 1.1 Definition................................. 7 1.1.1 Axioms of Vector Space..................... 7 1.1.2 Consequence of Axiom......................
Linear Algebra Min Yan January 2, 2018 2 Contents 1 Vector Space 7 1.1 Definition................................. 7 1.1.1 Axioms of Vector Space..................... 7 1.1.2 Consequence of Axiom......................
On components of vectorial permutations of F n q
 On components of vectorial permutations of F n q Nurdagül Anbar 1, Canan Kaşıkcı 2, Alev Topuzoğlu 2 1 Johannes Kepler University, Altenbergerstrasse 69, 4040-Linz, Austria Email: nurdagulanbar2@gmail.com
On components of vectorial permutations of F n q Nurdagül Anbar 1, Canan Kaşıkcı 2, Alev Topuzoğlu 2 1 Johannes Kepler University, Altenbergerstrasse 69, 4040-Linz, Austria Email: nurdagulanbar2@gmail.com
Theorem 5.3. Let E/F, E = F (u), be a simple field extension. Then u is algebraic if and only if E/F is finite. In this case, [E : F ] = deg f u.
![Theorem 5.3. Let E/F, E = F (u), be a simple field extension. Then u is algebraic if and only if E/F is finite. In this case, [E : F ] = deg f u.](/thumbs/81/83685479.jpg "Theorem 5.3. Let E/F, E = F (u), be a simple field extension. Then u is algebraic if and only if E/F is finite. In this case, [E : F ] = deg f u.") 5. Fields 5.1. Field extensions. Let F E be a subfield of the field E. We also describe this situation by saying that E is an extension field of F, and we write E/F to express this fact. If E/F is a field
5. Fields 5.1. Field extensions. Let F E be a subfield of the field E. We also describe this situation by saying that E is an extension field of F, and we write E/F to express this fact. If E/F is a field
Modern Algebra Lecture Notes: Rings and fields set 6, revision 2
 Modern Algebra Lecture Notes: Rings and fields set 6, revision 2 Kevin Broughan University of Waikato, Hamilton, New Zealand May 20, 2010 Solving quadratic equations: traditional The procedure Work in
Modern Algebra Lecture Notes: Rings and fields set 6, revision 2 Kevin Broughan University of Waikato, Hamilton, New Zealand May 20, 2010 Solving quadratic equations: traditional The procedure Work in
2. Intersection Multiplicities
 2. Intersection Multiplicities 11 2. Intersection Multiplicities Let us start our study of curves by introducing the concept of intersection multiplicity, which will be central throughout these notes.
2. Intersection Multiplicities 11 2. Intersection Multiplicities Let us start our study of curves by introducing the concept of intersection multiplicity, which will be central throughout these notes.