Scenario generation in stochastic programming with application to energy systems
|
|
|
- Deirdre Ferguson
- 6 years ago
- Views:
Transcription
1 Scenario generation in stochastic programming with application to energy systems W. Römisch Humboldt-University Berlin Institute of Mathematics SESO 2017 International Thematic Week Smart Energy and Stochastic Optimization ENSTA and ENPC, Paris, May 30 to June 1, 2017
2 Introduction Many stochastic programming models may be traced back to minimizing an expectation functional on some closed subset of a Euclidean space or, eventually in addition, relative to some expectation constraint. Their general form is { } (SP) min f 0 (x, ξ)p (dξ) : x X, f 1 (x, ξ)p (dξ) 0 Ξ where X is a closed subset of R m, Ξ a closed subset of R s, P is a Borel probability measure on Ξ abbreviated by P P(Ξ). The functions f 0 and f 1 from R m Ξ to the extended reals R = (, ] are normal integrands. For example, typical integrands in linear two-stage stochastic programming models are { g(x) + Φ(q(ξ), h(x, ξ)), q(ξ) D f 0 (x, ξ) = and f +, else 1 (x, ξ) 0, where X and Ξ are convex polyhedral, g( ) is a linear function, q( ) is affine, D = {q R m : {z R r : W z q Y } = } denotes the convex polyhedral dual feasibility set, h(, ξ) is affine for fixed ξ and h(x, ) is affine for fixed x, and Φ denotes the infimal function of the linear (second-stage) optimization problem Φ(q, t) := inf{ q, y : W y = t, y Y } with (r, m) matrix W and convex polyhedral cone Y R m. Ξ
3 Typical integrands f 1 appearing in chance constrained programming are of the form f 1 (x, ξ) = p 1l P(x) (ξ), where 1l P(x) is the characteristic function of the polyhedron P(x) = {ξ Ξ : h(x, ξ) 0} depending on x. For general continuous multivariate probability distributions P such stochastic optimization models (SP) are not solvable in general. Many approaches for solving such optimization models computationally are based on discrete approximations of the probability measure P, i.e., on finding a discrete probability measure P n in P n (Ξ) := { n p i δ ξ i : ξ i Ξ, p i 0, i = 1,..., n, i=1 n i=1 } p i = 1 for some n N, which approximates P in a suitable way. The atoms ξ i, i = 1,..., n, of P n are often called scenarios in this context. Of course, the notion suitable should at least include that the distance of infima becomes resonably small. v(p ) v(p n )
4 Stability-based scenario generation Let v(p ) and S(P ) denote the infimum and solution set of (SP). We are interested in their dependence on the underlying probability distribution P. To state a stability result we introduce the following sets of functions and of probability distributions (both defined on Ξ) F = {f j (x, ) : j = 0, 1, x X}, { P F = Q P(Ξ) : < inf f j(x, ξ)q(dξ), sup x X Ξ x X and the (pseudo-) distance on P F d F (P, Q) = sup f(ξ)(p Q)(dξ) (P, Q P F ). f F Ξ Ξ } f j (x, ξ)q(dξ) < +, j At first sight the set P F seems to have a complicated structure. For typical applications, however, like for linear two-stage and chance constrained models, the sets P F or appropriate subsets allow a simple characterization, for example, as subsets of P(Ξ) satisfying certain moment conditions.
5 Proposition: We consider (SP) for P P F, assume that X is compact and (i) the function x Ξ f 0(x, ξ)p (dξ) is Lipschitz continuous on X, (ii) the set-valued mapping y { x X : Ξ f 1(x, ξ)p (dξ) y } satisfies the Aubin property at (0, x) for each x S(P ). Then there exist constants L > 0 and δ > 0 such that the estimates v(p ) v(q) L d F (P, Q) sup d(x, S(P )) Ψ P (L d F (P, Q)) x S(Q) hold whenever Q P F and d F (P, Q) < δ. The real-valued function Ψ P is given by Ψ P (r) = r + ψp 1 (2r) for all r R +, where ψ P is the growth function { ψ P (τ) = inf f 0 (x, ξ)p (dξ) v(p ) : d(x, S(P )) τ, x X, x X Ξ } f 1 (x, ξ)p (dξ) 0. In case f 1 0 only lower semicontinuity is needed in (i) and the estimates hold with L = 1 and for any δ > 0. Furthermore, Ψ P is lower semicontinuous and increasing on R + with Ψ P (0) = 0. (Rachev-Römisch 02) Ξ
6 The stability result suggests to choose discrete approximations from P n (Ξ) for solving (SP) such that they solve the best approximation problem (OSG) min d F(P, P n ). P n P n (Ξ) at least approximately. Determining the scenarios of some solution to (OSG) may be called optimal scenario generation. This optimal choice of discrete approximations is challenging and not possible in general. For linear two-stage models (OSG) may be reformulated as best approximation problem for the expected recourse function or as generalized semi-infinite program which is convex in some cases (Henrion-Römisch 17). It was suggested in (Rachev-Römisch 02) to eventually enlarge the function class F such that d F becomes a metric distance and has further nice properties. This may lead, however, to nonconvex nondifferentiable minimization problems (OSG) for determining the optimal scenarios and to unfavorable convergence rates of ( ) min d F(P, P n ) P n P n (Ξ). n N Typical examples are to choose F as bounded subset of some Banach space C r,α (Ξ) with r N 0, α (0, 1], and convergence rate O(n r+α s ).
7 Motivated by linear two-stage models one may consider Fortet-Mourier metrics: ζ r (P, Q) := sup f(ξ)(p Q)(dξ) : f F r (Ξ), Ξ where the function class F r for r 1 is given by F r (Ξ) := { f : Ξ R : f(ξ) f( ξ) c r (ξ, ξ), ξ, ξ Ξ }, c r (ξ, ξ) := max{1, ξ r 1, ξ r 1 } ξ ξ (ξ, ξ Ξ). Duality holds with a transshipment problem and cost function c r. Proposition: (Rachev-Rüschendorf 98) If Ξ is bounded, ζ r may be reformulated as dual transportation problem { ζ r (P, Q) = inf ĉ r (ξ, ξ)η(dξ, } d ξ) : π 1 η =P, π 2 η = Q, Ξ Ξ where the reduced cost ĉ r is a metric with ĉ r c r and given by ĉ r (ξ, ξ) := inf { n 1 i=1 c r (ξ li, ξ li+1 ) : n N, ξ li Ξ, ξ l1 = ξ, ξ ln = ξ }.
8 Monte Carlo and Quasi-Monte Carlo methods Monte Carlo: Let ξ i ( ), i N, denote independent and identically distributed random vectors with common distribution P and P n be the empirical measure P n ( ) = 1 n δ n ξ i ( ) (n N) i=1 defined on some probability space (Ω, A, P). The law of large numbers implies that the sequence (P n ( )) n N converges P-almost surely weakly to P. To study the convergence rate one considers the empirical process {β n (P n ( ) P )f} f F (n N) indexed by a function class F with sequence (β n ), where Qf = Ξ f(ξ)q(dξ) for any Borel probability measure Q on Ξ. The empirical process is called bounded in probability with tail function τ F if for all ε > 0 and n N the estimate P({β n d F (P n ( ), P ) ε}) τ F (ε) holds. Whether the empirical process is bounded in probability, depends on the size of the class F measured in terms of covering numbers in L 2 (Ξ, P ). Typically, one has an exponential tail τ F (ε) = C(ε) exp ( ε 2 ) and β n = n.
9 Quasi-Monte Carlo: The basic idea of Quasi-Monte Carlo (QMC) methods is to use deterministic points that are (in some way) uniformly distributed in [0, 1] s and to consider first the approximate computation of I s (f) = f(ξ)dξ by Q n,s (f) = 1 n f(ξ i ) [0,1] s n with (non-random) points ξ i, i = 1,..., n, from [0, 1] s. The uniform distribution property of point sets may be defined in terms of the so-called L p -discrepancy of ξ 1,..., ξ n for 1 p d p,n (ξ 1,..., ξ n ) = ( )1 disc(ξ) p p dξ, disc(ξ) := [0,1] s i=1 d ξ j 1 n j=1 A sequence (ξ i ) i N is called uniformly distributed in [0, 1] s if d p,n (ξ 1,..., ξ n ) 0 for n There exist sequences (ξ i ) in [0, 1] s such that for all δ (0, 1 2 ] n 1l [0,ξ) (ξ i ). d,n (ξ 1,..., ξ n ) = O(n 1 (log n) s ) or d,n (ξ 1,..., ξ n ) C(s, δ)n 1+δ. i=1
10 Using a suitable randomization of such sequences may lead to a root mean square convergence rate E[d 2 2,n (ξ1,..., ξ n )] C(δ)n 1+δ with a constant C(δ) not depending on the dimension s and δ (0, 1 2 ]. Example: Randomly shifted lattice rule (Sloan-Kuo-Joe 02). With a random vector which is uniformly distributed on [0, 1] s, we consider the randomly shifted lattice rule Q n,s (ω)(f) = 1 n ({ (j 1) }) f g + (ω). n n j=1 Theorem: Let n N be prime and f belong to the weighted tensor product Sobolev space W (1,...,1) 2,γ,mix ([0, 1]s ). Then g Z d + can be constructed componentwise such that for each δ (0, 1 2 ] there exists a constant C(δ) > 0 with sup E Q n,s (ω)(f) I s (f) 2 C(δ) n 1+δ, f γ 1 where C(δ) increases if δ decreases, but does not depend on s if the sequence (γ j ) of coordinate weights satisfies 1 j=1 γ 2(1 δ) j < (e.g. γ j = 1 ). j 3 Note that piecewise polynomial functions f do almost belong to W (1,...,1) 2,γ,mix ([0, 1]s ) if its effective dimension is small (Heitsch-Leövey-Römisch 16).
11 Scenario reduction Let P and Q be two discrete distributions, where ξ i are the scenarios with probabilities p i, i = 1,..., N, of P and ξ j the scenarios and q j, j = 1,..., n, the probabilities of Q. Let Ξ denote the union of both scenario sets. Then { ζ r (P, Q) = inf ĉ r (ξ, ξ)η(dξ, } d ξ) : π 1 η = P, π 2 η = Q Ξ Ξ { N = inf i=1 n η ij ĉ r (ξ i, ξ j ) : j=1 { N = sup p i u i i=1 n N η ij = p i, η ij = q j, η ij 0, i=1 } i = 1,..., N, j = 1,..., n j=1 n q j v j : p i q j ĉ r (ξ i, ξ j ), i = 1,..., N, } j = 1,..., n j=1 These two formulas represent primal and dual representations of ζ r (P, Q) and primal and dual linear programs.
12 The optimal scenario reduction problem min ζ r(p, Q) Q P n (Ξ) with P P N (Ξ), N > n, can be decomposed into finding the optimal scenario set J to remain and into determining the optimal new probabilities given J. Let P have scenarios ξ i with probabilities p i, i = 1,..., N, and Q being supported by a given subset of scenarios ξ j, j J {1,..., N}, J = n. The best approximation of P with respect to ζ r by such a distribution Q exists and is denoted by Q. It has the distance D J := ζ r (P, Q ) = min Q P n (Ξ) ζ r(p, Q) = i J p i min j J ĉr(ξ i, ξ j ) and the probabilities qj = p j + p i, j J, where I j := {i J : j = j(i)} i I j and j(i) arg min ĉr(ξ i, ξ j ), i J (optimal redistribution). j J (Dupačová Gröwe-Kuska Römisch 03)
13 Determining the optimal scenario set J with prescribed cardinality n is, however, a combinatorial optimization problem: (n-median problem) min {D J : J {1,..., N}, J = n} Hence, the problem of finding the optimal set J of remaining scenarios is N P- hard and polynomial time algorithms are not available. Reformulation as combinatorial program min N p i x ij ĉ r (ξ i, ξ j ) i,j=1 N x ij = 1 (j = 1,..., N), i=1 subject to N y i n, i=1 x ij y i, x ij {0, 1} (i, j = 1,..., N), y i {0, 1} (i = 1,..., N). The variable y i decides whether scenario ξ i remains and x ij indicates whether scenario ξ j minimizes the ĉ r -distance to ξ i.
14 There is a well developed theory of approximation algorithms for the n-median problem. The current best approximation algorithm provides always an approximation guarantee of ε (Li-Svensson 16). The simplest algorithms are greedy heuristics, namely, backward (or reverse) and forward heuristics: Starting point (n = N 1): min p l min ĉ r (ξ l, ξ j ) l {1,...,N} j l Algorithm 1: (Backward reduction) Step [0]: J [0] :=. Step [i]: Step [N-n+1]: l i arg min l J [i 1] k J [i 1] {l} J [i] := J [i 1] {l i }. Optimal redistribution. p k min ĉ r (ξ k, ξ j ). j J [i 1] {l}
15 Starting point (n = 1): min u {1,...,N} Algorithm 2: (Forward selection) N p k ĉ r (ξ k, ξ u ) k=1 Step [0]: Step [i]: Step [n+1]: J [0] := {1,..., N}. u i arg min u J [i 1] J [i] := J [i 1] \ {u i }. k J [i 1] \{u} Optimal redistribution. p k min ĉ r (ξ k, ξ j ), j J [i 1] \{u} Although the approximation ratio of forward selection is known to be unbounded (Rujeerapaiboon-Schindler-Kuhn-Wiesemann 17), it worked well in many practical instances.
16 Example: (Weekly electrical load scenario tree) Ternary load scenario tree (N=729 scenarios) (Mean shifted) Ternary load scenario tree (N=729 scenarios)
17 Reduced load scenario trees obtained by forward selection with respect to the Fortet-Mourier distances ζ r, r = 1, 2, 4, 7 and n = 20 (starting above left) (Heitsch-Römisch 07)
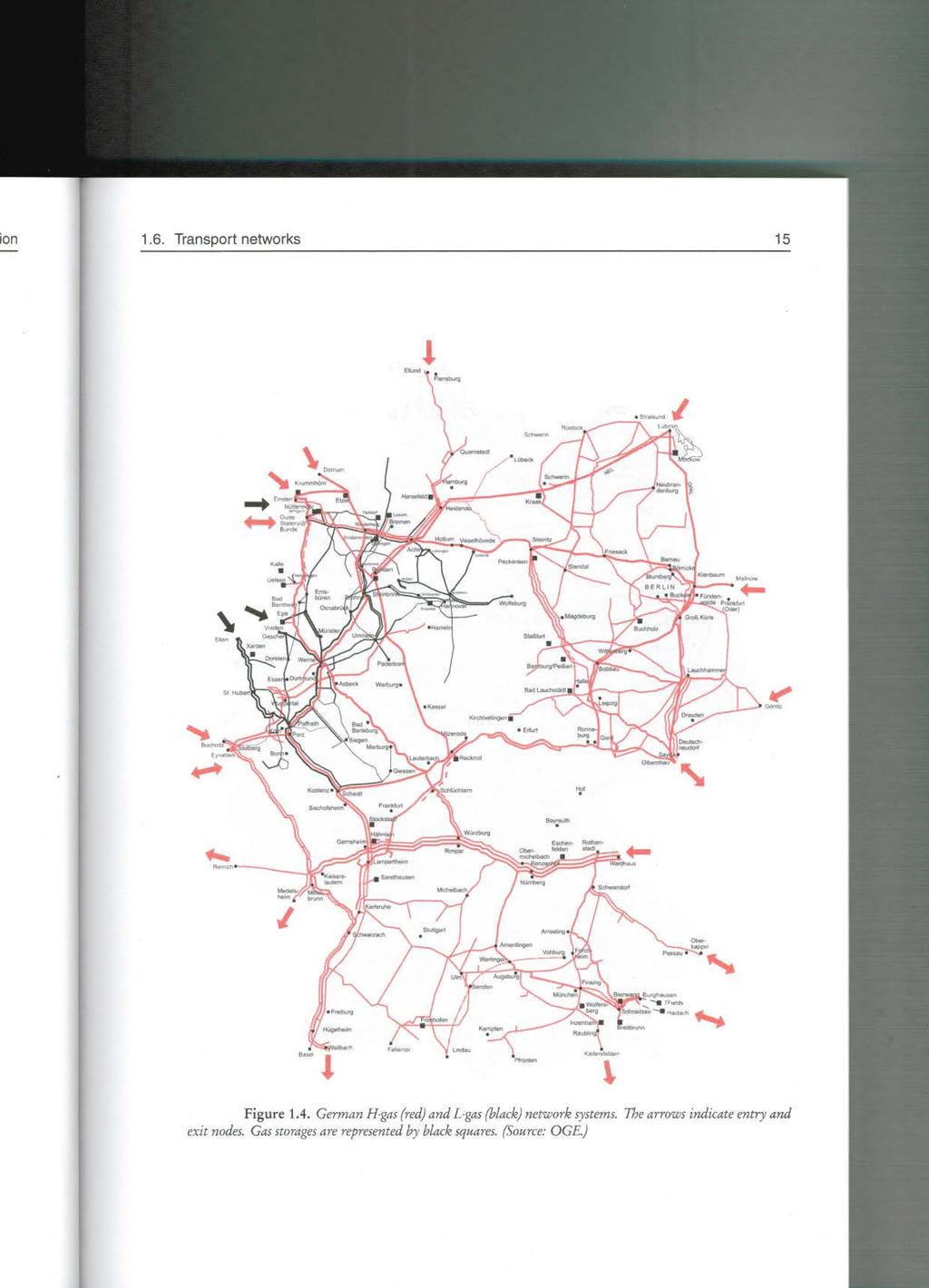
18 Gas network capacities and validation of nominations (H. Heitsch, H. Leövey, R. Mirkov, I. Wegner-Specht) We consider the gas transport network of the company Open Grid Europe GmbH (OGE). It is Germany s largest gas transport company. Such networks consist of intermeshed pipelines which are actuated and safeguarded by active elements (like valves and compressor machines). Here, we consider the stationary state of the network and the isothermal case. Two different gas qualities are considered: H-gas and L-gas (high and low calorific gas). Both are transported by different networks. The gas dynamics in a pipe is modeled by the Euler equations, a nonlinear system of hyperbolic partial differential equations. In the stationary and isothermal situation they boil down to nonlinear relations between pressure and flow. Together with models for the active elements, this leads to large systems of nonlinear mixed-integer equations and inequalities. Aim: Evaluating the capacity of a gas network, validating nominations and verifying booked capacities.
19

20 Statistical data and data analysis Hourly gas flow data is available at all exit nodes of a given network for a period of eight years. Due to stationary modeling we consider the daily mean gas flow at all exit nodes. Since it depends on the daily mean temperature, we consider a daily reference temperature based on a weighted average temperature taken at different network nodes. Due to stationary and isothermal modeling we introduce the temperature classes (-15,-4], (-4,-2], (-2,0],..., (18,20], (20,30) and perform a corresponding filtering of all daily mean gas flows at all exit nodes according to the daily reference temperatures. We also check that a reasonable amount of daily mean gas flow data is available for all temperature classes except for (-15,-4]. Another filtering is carried out for day classes (working day, weekend, holiday).

.")
, market transition (middle),")
21 Examples of daily main gas flow at exit nodes as function of the temperature Daily mean gas flow data at exit nodes with municipal power stations, with zero flow (right). Daily mean gas flow data at exit nodes with company (left), market transition (middle), storage (right).
 (log)normal distributions Zero gas flow appears with empirical probability p")
 = p F 0 (x) + (1 p) F + (x)")
22 Univariate distribution fitting Classes of univariate probability distributions: (shifted) uniform distributions (shifted) (log)normal distributions Zero gas flow appears with empirical probability p at several exit nodes. Hence, we consider the shifted probability distribution function F (x) = p F 0 (x) + (1 p) F + (x) Probability distribution function of a shifted normal distribution at exit 1603


23 Fitting multivariate normal distributions Multivariate normal distributions are fitted for exit gas flows that satisfy normality tests and have significant correlations with other exit nodes, i.e., in addition to means and variances, correlations are estimated by standard estimators if sufficient data is available. Examples of correlation matrices: Correlation plots for the temperature classes (10, 12] and (18, 20] in certain areas of the H-gas network.
24 Scenario generation Using randomized Quasi-Monte Carlo methods we determine N samples with probability 1 N for the s-dimensional random vector ξ that corresponds to the random gas flows at the s exits of a given network. We proceed as follows: We determine N samples η j of the uniform distribution on [0, 1) s using Sobol points and perform a componentwise random scrambling of their binary digits using the Mersenne Twister. The scenarios η j, j = 1,..., N, combine favorable properties of both Monte Carlo and Quasi-Monte Carlo methods. Determine samples in R s by ζ j i = Φ 1 i (η j i ) (i = 1,..., s; j = 1,..., N) using the univariate distribution function Φ i of the ith component. If a part of the components of ξ has a d-dimensional multivariate normal distribution with mean m R s and s s covariance matrix Σ, we perform a decomposition Σ = A A, where the matrix A preferably corresponds to principal component analysis. Then the s-dimensional vectors ξ j = A ζ j + m (j = 1, 2,..., N) are suitable scenarios for this part of the random vector ξ.
25 Comparison of n = 2 7 Monte Carlo Mersenne Twister points and randomly binary shifted Sobol points in dimension s = 500, projection (8,9)
26 Illustration: N = 2340 samples based on randomized Sobol points are generated for several hundred exits and later reduced by scenario reduction to n = 50 scenarios. The result is shown below for a specific exit where the diameters of the red balls are proportional to the new probabilities Hourly mean daily power in kwh/h Mean daily temperature in C (Chapters 13 and 14 in Koch-Hiller-Pfetsch-Schewe 15)
27 References J. Dick, F. Y. Kuo, I. H. Sloan: High-dimensional integration the Quasi-Monte Carlo way, Acta Numerica 22 (2013), J. Dupačová, N. Gröwe-Kuska, W. Römisch: Scenario reduction in stochastic programming: An approach using probability metrics, Mathematical Programming 95 (2003), H.Heitsch, H. Leövey, W. Römisch: Are Quasi-Monte Carlo algorithms efficient for two-stage stochastic programs?, Computational Optimization and Applications 65 (2016), H. Heitsch, W. Römisch: A note on scenario reduction for two-stage stochastic programs, Operations Research Letters 35 (2007), R. Henrion, W. Römisch: Optimal scenario generation and reduction in stochastic programming, Stochastic Programming E-Print Series 2 (2017) and submitted. T. Koch, B. Hiller, M. E. Pfetsch, L. Schewe (Eds.): Evaluating Gas Network Capacities, SIAM-MOS Series on Optimization, Philadelphia, S. Li, O. Svensson: Approximating k-median via pseudo-approximation, SIAM Journal on Computing 45 (2016), S. T. Rachev, W. Römisch: Quantitative stability in stochastic programming: The method of probability metrics, Mathematics of Operations Research 27 (2002), S. T. Rachev, L. Rüschendorf: Mass Transportation Problems, Vol. I, Springer, Berlin N. Rujeerapaiboon, K. Schindler, D. Kuhn, W. Wiesemann: Scenario reduction revisited: Fundamental limits and guarantees, Stochastic Programming E-Print Series 1 (2017) and submitted.
Jitka Dupačová and scenario reduction
 Jitka Dupačová and scenario reduction W. Römisch Humboldt-University Berlin Institute of Mathematics http://www.math.hu-berlin.de/~romisch Session in honor of Jitka Dupačová ICSP 2016, Buzios (Brazil),
Jitka Dupačová and scenario reduction W. Römisch Humboldt-University Berlin Institute of Mathematics http://www.math.hu-berlin.de/~romisch Session in honor of Jitka Dupačová ICSP 2016, Buzios (Brazil),
Scenario Reduction: Old and New Results
 Scenario Reduction: Old and New Results W. Römisch Humboldt-University Berlin Institute of Mathematics 10099 Berlin, Germany http://www.math.hu-berlin.de/~romisch (H. Heitsch, R. Henrion, C. Küchler) Workshop
Scenario Reduction: Old and New Results W. Römisch Humboldt-University Berlin Institute of Mathematics 10099 Berlin, Germany http://www.math.hu-berlin.de/~romisch (H. Heitsch, R. Henrion, C. Küchler) Workshop
Stability of Stochastic Programming Problems
 Stability of Stochastic Programming Problems W. Römisch Humboldt-University Berlin Institute of Mathematics 10099 Berlin, Germany http://www.math.hu-berlin.de/~romisch Page 1 of 35 Spring School Stochastic
Stability of Stochastic Programming Problems W. Römisch Humboldt-University Berlin Institute of Mathematics 10099 Berlin, Germany http://www.math.hu-berlin.de/~romisch Page 1 of 35 Spring School Stochastic
A note on scenario reduction for two-stage stochastic programs
 A note on scenario reduction for two-stage stochastic programs Holger Heitsch a and Werner Römisch a a Humboldt-University Berlin, Institute of Mathematics, 199 Berlin, Germany We extend earlier work on
A note on scenario reduction for two-stage stochastic programs Holger Heitsch a and Werner Römisch a a Humboldt-University Berlin, Institute of Mathematics, 199 Berlin, Germany We extend earlier work on
Scenario generation in stochastic programming
 Scenario generation in stochastic programming Werner Römisch Humboldt-University Berlin, Institute of Mathematics, 10099 Berlin, Germany, romisch@math.hu-berlin.de Abstract Stability-based methods for
Scenario generation in stochastic programming Werner Römisch Humboldt-University Berlin, Institute of Mathematics, 10099 Berlin, Germany, romisch@math.hu-berlin.de Abstract Stability-based methods for
Scenario generation Contents
 Scenario generation W. Römisch Humboldt-University Berlin Department of Mathematics www.math.hu-berlin.de/~romisch Page 1 of 39 Tutorial, ICSP12, Halifax, August 14, 2010 (1) Aproximation issues (2) Generation
Scenario generation W. Römisch Humboldt-University Berlin Department of Mathematics www.math.hu-berlin.de/~romisch Page 1 of 39 Tutorial, ICSP12, Halifax, August 14, 2010 (1) Aproximation issues (2) Generation
Stochastic optimization, multivariate numerical integration and Quasi-Monte Carlo methods. W. Römisch
 Stochastic optimization, multivariate numerical integration and Quasi-Monte Carlo methods W. Römisch Humboldt-University Berlin Institute of Mathematics www.math.hu-berlin.de/~romisch Chemnitzer Mathematisches
Stochastic optimization, multivariate numerical integration and Quasi-Monte Carlo methods W. Römisch Humboldt-University Berlin Institute of Mathematics www.math.hu-berlin.de/~romisch Chemnitzer Mathematisches
Approximation of stochastic optimization problems and scenario generation
 Approximation of stochastic optimization problems and scenario generation W. Römisch Humboldt-University Berlin Institute of Mathematics 10099 Berlin, Germany http://www.math.hu-berlin.de/~romisch Page
Approximation of stochastic optimization problems and scenario generation W. Römisch Humboldt-University Berlin Institute of Mathematics 10099 Berlin, Germany http://www.math.hu-berlin.de/~romisch Page
Stability of optimization problems with stochastic dominance constraints
 Stability of optimization problems with stochastic dominance constraints D. Dentcheva and W. Römisch Stevens Institute of Technology, Hoboken Humboldt-University Berlin www.math.hu-berlin.de/~romisch SIAM
Stability of optimization problems with stochastic dominance constraints D. Dentcheva and W. Römisch Stevens Institute of Technology, Hoboken Humboldt-University Berlin www.math.hu-berlin.de/~romisch SIAM
Optimal scenario generation and reduction in stochastic programming
 Noname manuscript No. (will be inserted by the editor) Optimal scenario generation and reduction in stochastic programming R. Henrion W. Römisch the date of receipt and acceptance should be inserted later
Noname manuscript No. (will be inserted by the editor) Optimal scenario generation and reduction in stochastic programming R. Henrion W. Römisch the date of receipt and acceptance should be inserted later
Stability-based generation of scenario trees for multistage stochastic programs
 Stability-based generation of scenario trees for multistage stochastic programs H. Heitsch and W. Römisch Humboldt-University Berlin Institute of Mathematics 10099 Berlin, Germany http://www.math.hu-berlin.de/~romisch
Stability-based generation of scenario trees for multistage stochastic programs H. Heitsch and W. Römisch Humboldt-University Berlin Institute of Mathematics 10099 Berlin, Germany http://www.math.hu-berlin.de/~romisch
Scenario Generation in Stochastic Programming with Application to Optimizing Electricity Portfolios under Uncertainty
 Scenario Generation in Stochastic Programming with Application to Optimizing Electricity Portfolios under Uncertainty W. Römisch Humboldt-University Berlin Department of Mathematics www.math.hu-berlin.de/~romisch
Scenario Generation in Stochastic Programming with Application to Optimizing Electricity Portfolios under Uncertainty W. Römisch Humboldt-University Berlin Department of Mathematics www.math.hu-berlin.de/~romisch
Stochastic Programming: From statistical data to optimal decisions
 Stochastic Programming: From statistical data to optimal decisions W. Römisch Humboldt-University Berlin Department of Mathematics (K. Emich, H. Heitsch, A. Möller) Page 1 of 24 6th International Conference
Stochastic Programming: From statistical data to optimal decisions W. Römisch Humboldt-University Berlin Department of Mathematics (K. Emich, H. Heitsch, A. Möller) Page 1 of 24 6th International Conference
Stochastic Programming: Tutorial Part II
 Stochastic Programming: Tutorial Part II W. Römisch Humboldt-University Berlin Institute of Mathematics 10099 Berlin, Germany http://www.math.hu-berlin.de/~romisch Page 1 of 77 Optimization: Computation,
Stochastic Programming: Tutorial Part II W. Römisch Humboldt-University Berlin Institute of Mathematics 10099 Berlin, Germany http://www.math.hu-berlin.de/~romisch Page 1 of 77 Optimization: Computation,
ANOVA decomposition of convex piecewise linear functions
 ANOVA decomposition of convex piecewise linear functions W. Römisch Abstract Piecewise linear convex functions arise as integrands in stochastic programs. They are Lipschitz continuous on their domain,
ANOVA decomposition of convex piecewise linear functions W. Römisch Abstract Piecewise linear convex functions arise as integrands in stochastic programs. They are Lipschitz continuous on their domain,
Progress in high-dimensional numerical integration and its application to stochastic optimization
 Progress in high-dimensional numerical integration and its application to stochastic optimization W. Römisch Humboldt-University Berlin Department of Mathematics www.math.hu-berlin.de/~romisch Short course,
Progress in high-dimensional numerical integration and its application to stochastic optimization W. Römisch Humboldt-University Berlin Department of Mathematics www.math.hu-berlin.de/~romisch Short course,
Probability metrics and the stability of stochastic programs with recourse
 Probability metrics and the stability of stochastic programs with recourse Michal Houda Charles University, Faculty of Mathematics and Physics, Prague, Czech Republic. Abstract In stochastic optimization
Probability metrics and the stability of stochastic programs with recourse Michal Houda Charles University, Faculty of Mathematics and Physics, Prague, Czech Republic. Abstract In stochastic optimization
Weierstraß-Institut. für Angewandte Analysis und Stochastik. Leibniz-Institut im Forschungsverbund Berlin e. V. Preprint ISSN
 Weierstraß-Institut für Angewandte Analysis und Stochastik Leibniz-Institut im Forschungsverbund Berlin e. V. Preprint ISSN 2198-5855 Are Quasi-Monte Carlo algorithms efficient for two-stage stochastic
Weierstraß-Institut für Angewandte Analysis und Stochastik Leibniz-Institut im Forschungsverbund Berlin e. V. Preprint ISSN 2198-5855 Are Quasi-Monte Carlo algorithms efficient for two-stage stochastic
Quantitative Stability of Two Stage Linear Second-order Conic Stochastic Programs with Full Random Recourse
 Quantitative Stability of Two Stage Linear Second-order Conic Stochastic Programs with Full Random Recourse Qingsong Duan, Mengwei Xu, Shaoyan Guo, and Liwei Zhang October 7, 2017 Abstract In this paper,
Quantitative Stability of Two Stage Linear Second-order Conic Stochastic Programs with Full Random Recourse Qingsong Duan, Mengwei Xu, Shaoyan Guo, and Liwei Zhang October 7, 2017 Abstract In this paper,
Conditioning of linear-quadratic two-stage stochastic programming problems
 Conditioning of linear-quadratic two-stage stochastic programming problems W. Römisch Humboldt-University Berlin Institute of Mathematics http://www.math.hu-berlin.de/~romisch (K. Emich, R. Henrion) (WIAS
Conditioning of linear-quadratic two-stage stochastic programming problems W. Römisch Humboldt-University Berlin Institute of Mathematics http://www.math.hu-berlin.de/~romisch (K. Emich, R. Henrion) (WIAS
DISCREPANCY DISTANCES AND SCENARIO REDUCTION IN TWO-STAGE STOCHASTIC MIXED-INTEGER PROGRAMMING. René Henrion. Christian Küchler.
 JOURNAL OF INDUSTRIAL AND Website: http://aimsciences.org MANAGEMENT OPTIMIZATION Volume 4, Number 2, May 2008 pp. 363 384 DISCREPANCY DISTANCES AND SCENARIO REDUCTION IN TWO-STAGE STOCHASTIC MIXED-INTEGER
JOURNAL OF INDUSTRIAL AND Website: http://aimsciences.org MANAGEMENT OPTIMIZATION Volume 4, Number 2, May 2008 pp. 363 384 DISCREPANCY DISTANCES AND SCENARIO REDUCTION IN TWO-STAGE STOCHASTIC MIXED-INTEGER
Tutorial on quasi-monte Carlo methods
 Tutorial on quasi-monte Carlo methods Josef Dick School of Mathematics and Statistics, UNSW, Sydney, Australia josef.dick@unsw.edu.au Comparison: MCMC, MC, QMC Roughly speaking: Markov chain Monte Carlo
Tutorial on quasi-monte Carlo methods Josef Dick School of Mathematics and Statistics, UNSW, Sydney, Australia josef.dick@unsw.edu.au Comparison: MCMC, MC, QMC Roughly speaking: Markov chain Monte Carlo
Scenario estimation and generation
 October 10, 2004 The one-period case Distances of Probability Measures Tensor products of trees Tree reduction A decision problem is subject to uncertainty Uncertainty is represented by probability To
October 10, 2004 The one-period case Distances of Probability Measures Tensor products of trees Tree reduction A decision problem is subject to uncertainty Uncertainty is represented by probability To
CONVERGENCE ANALYSIS OF SAMPLING-BASED DECOMPOSITION METHODS FOR RISK-AVERSE MULTISTAGE STOCHASTIC CONVEX PROGRAMS
 CONVERGENCE ANALYSIS OF SAMPLING-BASED DECOMPOSITION METHODS FOR RISK-AVERSE MULTISTAGE STOCHASTIC CONVEX PROGRAMS VINCENT GUIGUES Abstract. We consider a class of sampling-based decomposition methods
CONVERGENCE ANALYSIS OF SAMPLING-BASED DECOMPOSITION METHODS FOR RISK-AVERSE MULTISTAGE STOCHASTIC CONVEX PROGRAMS VINCENT GUIGUES Abstract. We consider a class of sampling-based decomposition methods
Airline Network Revenue Management by Multistage Stochastic Programming
 Airline Network Revenue Management by Multistage Stochastic Programming K. Emich, H. Heitsch, A. Möller, W. Römisch Humboldt-University Berlin, Department of Mathematics Page 1 of 18 GOR-Arbeitsgruppe
Airline Network Revenue Management by Multistage Stochastic Programming K. Emich, H. Heitsch, A. Möller, W. Römisch Humboldt-University Berlin, Department of Mathematics Page 1 of 18 GOR-Arbeitsgruppe
Quasi-Monte Carlo integration over the Euclidean space and applications
 Quasi-Monte Carlo integration over the Euclidean space and applications f.kuo@unsw.edu.au University of New South Wales, Sydney, Australia joint work with James Nichols (UNSW) Journal of Complexity 30
Quasi-Monte Carlo integration over the Euclidean space and applications f.kuo@unsw.edu.au University of New South Wales, Sydney, Australia joint work with James Nichols (UNSW) Journal of Complexity 30
2 Chance constrained programming
 2 Chance constrained programming In this Chapter we give a brief introduction to chance constrained programming. The goals are to motivate the subject and to give the reader an idea of the related difficulties.
2 Chance constrained programming In this Chapter we give a brief introduction to chance constrained programming. The goals are to motivate the subject and to give the reader an idea of the related difficulties.
Fast evaluation of mixed derivatives and calculation of optimal weights for integration. Hernan Leovey
 Fast evaluation of mixed derivatives and calculation of optimal weights for integration Humboldt Universität zu Berlin 02.14.2012 MCQMC2012 Tenth International Conference on Monte Carlo and Quasi Monte
Fast evaluation of mixed derivatives and calculation of optimal weights for integration Humboldt Universität zu Berlin 02.14.2012 MCQMC2012 Tenth International Conference on Monte Carlo and Quasi Monte
Lecture 1. Stochastic Optimization: Introduction. January 8, 2018
 Lecture 1 Stochastic Optimization: Introduction January 8, 2018 Optimization Concerned with mininmization/maximization of mathematical functions Often subject to constraints Euler (1707-1783): Nothing
Lecture 1 Stochastic Optimization: Introduction January 8, 2018 Optimization Concerned with mininmization/maximization of mathematical functions Often subject to constraints Euler (1707-1783): Nothing
APPLIED MATHEMATICS REPORT AMR04/16 FINITE-ORDER WEIGHTS IMPLY TRACTABILITY OF MULTIVARIATE INTEGRATION. I.H. Sloan, X. Wang and H.
 APPLIED MATHEMATICS REPORT AMR04/16 FINITE-ORDER WEIGHTS IMPLY TRACTABILITY OF MULTIVARIATE INTEGRATION I.H. Sloan, X. Wang and H. Wozniakowski Published in Journal of Complexity, Volume 20, Number 1,
APPLIED MATHEMATICS REPORT AMR04/16 FINITE-ORDER WEIGHTS IMPLY TRACTABILITY OF MULTIVARIATE INTEGRATION I.H. Sloan, X. Wang and H. Wozniakowski Published in Journal of Complexity, Volume 20, Number 1,
Robust and Stochastic Optimization Notes. Kevin Kircher, Cornell MAE
 Robust and Stochastic Optimization Notes Kevin Kircher, Cornell MAE These are partial notes from ECE 6990, Robust and Stochastic Optimization, as taught by Prof. Eilyan Bitar at Cornell University in the
Robust and Stochastic Optimization Notes Kevin Kircher, Cornell MAE These are partial notes from ECE 6990, Robust and Stochastic Optimization, as taught by Prof. Eilyan Bitar at Cornell University in the
Distributionally Robust Discrete Optimization with Entropic Value-at-Risk
 Distributionally Robust Discrete Optimization with Entropic Value-at-Risk Daniel Zhuoyu Long Department of SEEM, The Chinese University of Hong Kong, zylong@se.cuhk.edu.hk Jin Qi NUS Business School, National
Distributionally Robust Discrete Optimization with Entropic Value-at-Risk Daniel Zhuoyu Long Department of SEEM, The Chinese University of Hong Kong, zylong@se.cuhk.edu.hk Jin Qi NUS Business School, National
Part III. Quasi Monte Carlo methods 146/349
 Part III Quasi Monte Carlo methods 46/349 Outline Quasi Monte Carlo methods 47/349 Quasi Monte Carlo methods Let y = (y,...,y N ) be a vector of independent uniform random variables in Γ = [0,] N, u(y)
Part III Quasi Monte Carlo methods 46/349 Outline Quasi Monte Carlo methods 47/349 Quasi Monte Carlo methods Let y = (y,...,y N ) be a vector of independent uniform random variables in Γ = [0,] N, u(y)
Some Background Material
 Chapter 1 Some Background Material In the first chapter, we present a quick review of elementary - but important - material as a way of dipping our toes in the water. This chapter also introduces important
Chapter 1 Some Background Material In the first chapter, we present a quick review of elementary - but important - material as a way of dipping our toes in the water. This chapter also introduces important
Reformulation of chance constrained problems using penalty functions
 Reformulation of chance constrained problems using penalty functions Martin Branda Charles University in Prague Faculty of Mathematics and Physics EURO XXIV July 11-14, 2010, Lisbon Martin Branda (MFF
Reformulation of chance constrained problems using penalty functions Martin Branda Charles University in Prague Faculty of Mathematics and Physics EURO XXIV July 11-14, 2010, Lisbon Martin Branda (MFF
Splitting Techniques in the Face of Huge Problem Sizes: Block-Coordinate and Block-Iterative Approaches
 Splitting Techniques in the Face of Huge Problem Sizes: Block-Coordinate and Block-Iterative Approaches Patrick L. Combettes joint work with J.-C. Pesquet) Laboratoire Jacques-Louis Lions Faculté de Mathématiques
Splitting Techniques in the Face of Huge Problem Sizes: Block-Coordinate and Block-Iterative Approaches Patrick L. Combettes joint work with J.-C. Pesquet) Laboratoire Jacques-Louis Lions Faculté de Mathématiques
Class 2 & 3 Overfitting & Regularization
 Class 2 & 3 Overfitting & Regularization Carlo Ciliberto Department of Computer Science, UCL October 18, 2017 Last Class The goal of Statistical Learning Theory is to find a good estimator f n : X Y, approximating
Class 2 & 3 Overfitting & Regularization Carlo Ciliberto Department of Computer Science, UCL October 18, 2017 Last Class The goal of Statistical Learning Theory is to find a good estimator f n : X Y, approximating
Optimization Problems in Gas Transportation. Lars Schewe Friedrich-Alexander-Universität Erlangen-Nürnberg CWM 3 EO 2014, Budapest
 Optimization Problems in Gas Transportation Lars Schewe Friedrich-Alexander-Universität Erlangen-Nürnberg CWM 3 EO 2014, Budapest Why do we care? Lars Schewe FAU Optimization Problems in Gas Transportation
Optimization Problems in Gas Transportation Lars Schewe Friedrich-Alexander-Universität Erlangen-Nürnberg CWM 3 EO 2014, Budapest Why do we care? Lars Schewe FAU Optimization Problems in Gas Transportation
Selected Examples of CONIC DUALITY AT WORK Robust Linear Optimization Synthesis of Linear Controllers Matrix Cube Theorem A.
 . Selected Examples of CONIC DUALITY AT WORK Robust Linear Optimization Synthesis of Linear Controllers Matrix Cube Theorem A. Nemirovski Arkadi.Nemirovski@isye.gatech.edu Linear Optimization Problem,
. Selected Examples of CONIC DUALITY AT WORK Robust Linear Optimization Synthesis of Linear Controllers Matrix Cube Theorem A. Nemirovski Arkadi.Nemirovski@isye.gatech.edu Linear Optimization Problem,
Learning Theory. Ingo Steinwart University of Stuttgart. September 4, 2013
 Learning Theory Ingo Steinwart University of Stuttgart September 4, 2013 Ingo Steinwart University of Stuttgart () Learning Theory September 4, 2013 1 / 62 Basics Informal Introduction Informal Description
Learning Theory Ingo Steinwart University of Stuttgart September 4, 2013 Ingo Steinwart University of Stuttgart () Learning Theory September 4, 2013 1 / 62 Basics Informal Introduction Informal Description
Application of QMC methods to PDEs with random coefficients
 Application of QMC methods to PDEs with random coefficients a survey of analysis and implementation Frances Kuo f.kuo@unsw.edu.au University of New South Wales, Sydney, Australia joint work with Ivan Graham
Application of QMC methods to PDEs with random coefficients a survey of analysis and implementation Frances Kuo f.kuo@unsw.edu.au University of New South Wales, Sydney, Australia joint work with Ivan Graham
Gas network extension planning for multiple demand scenarios
 Konrad-Zuse-Zentrum für Informationstechnik Berlin Takustraße 7 D-14195 Berlin-Dahlem Germany JONAS SCHWEIGER Gas network extension planning for multiple demand scenarios ZIB Report 14-29 (July 2014) Herausgegeben
Konrad-Zuse-Zentrum für Informationstechnik Berlin Takustraße 7 D-14195 Berlin-Dahlem Germany JONAS SCHWEIGER Gas network extension planning for multiple demand scenarios ZIB Report 14-29 (July 2014) Herausgegeben
Lagrange Relaxation: Introduction and Applications
 1 / 23 Lagrange Relaxation: Introduction and Applications Operations Research Anthony Papavasiliou 2 / 23 Contents 1 Context 2 Applications Application in Stochastic Programming Unit Commitment 3 / 23
1 / 23 Lagrange Relaxation: Introduction and Applications Operations Research Anthony Papavasiliou 2 / 23 Contents 1 Context 2 Applications Application in Stochastic Programming Unit Commitment 3 / 23
Quasi-Monte Carlo Methods for Applications in Statistics
 Quasi-Monte Carlo Methods for Applications in Statistics Weights for QMC in Statistics Vasile Sinescu (UNSW) Weights for QMC in Statistics MCQMC February 2012 1 / 24 Quasi-Monte Carlo Methods for Applications
Quasi-Monte Carlo Methods for Applications in Statistics Weights for QMC in Statistics Vasile Sinescu (UNSW) Weights for QMC in Statistics MCQMC February 2012 1 / 24 Quasi-Monte Carlo Methods for Applications
MIT Algebraic techniques and semidefinite optimization February 14, Lecture 3
 MI 6.97 Algebraic techniques and semidefinite optimization February 4, 6 Lecture 3 Lecturer: Pablo A. Parrilo Scribe: Pablo A. Parrilo In this lecture, we will discuss one of the most important applications
MI 6.97 Algebraic techniques and semidefinite optimization February 4, 6 Lecture 3 Lecturer: Pablo A. Parrilo Scribe: Pablo A. Parrilo In this lecture, we will discuss one of the most important applications
On Approximations and Stability in Stochastic Programming
 On Approximations and Stability in Stochastic Programming Peter Kall Abstract It has become an accepted approach to attack stochastic programming problems by approximating the given probability distribution
On Approximations and Stability in Stochastic Programming Peter Kall Abstract It has become an accepted approach to attack stochastic programming problems by approximating the given probability distribution
Scenario Reduction for Risk-Averse Stochastic Programs
 Scenario Reduction for Risk-Averse Stochastic Programs Sebastián Arpón 1, Tito Homem-de-Mello 1, Bernardo Pagnoncelli 1 1 School of Business, Universidad Adolfo Ibañez, Santiago, Chile Abstract In this
Scenario Reduction for Risk-Averse Stochastic Programs Sebastián Arpón 1, Tito Homem-de-Mello 1, Bernardo Pagnoncelli 1 1 School of Business, Universidad Adolfo Ibañez, Santiago, Chile Abstract In this
1. Introduction. In this paper we consider stochastic optimization problems of the form
 O RATES OF COVERGECE FOR STOCHASTIC OPTIMIZATIO PROBLEMS UDER O-I.I.D. SAMPLIG TITO HOMEM-DE-MELLO Abstract. In this paper we discuss the issue of solving stochastic optimization problems by means of sample
O RATES OF COVERGECE FOR STOCHASTIC OPTIMIZATIO PROBLEMS UDER O-I.I.D. SAMPLIG TITO HOMEM-DE-MELLO Abstract. In this paper we discuss the issue of solving stochastic optimization problems by means of sample
Monte Carlo Method for Numerical Integration based on Sobol s Sequences
 Monte Carlo Method for Numerical Integration based on Sobol s Sequences Ivan Dimov and Rayna Georgieva Institute of Information and Communication Technologies, Bulgarian Academy of Sciences, 1113 Sofia,
Monte Carlo Method for Numerical Integration based on Sobol s Sequences Ivan Dimov and Rayna Georgieva Institute of Information and Communication Technologies, Bulgarian Academy of Sciences, 1113 Sofia,
Applicability of Quasi-Monte Carlo for lattice systems
 Applicability of Quasi-Monte Carlo for lattice systems Andreas Ammon 1,2, Tobias Hartung 1,2,Karl Jansen 2, Hernan Leovey 3, Andreas Griewank 3, Michael Müller-Preussker 1 1 Humboldt-University Berlin,
Applicability of Quasi-Monte Carlo for lattice systems Andreas Ammon 1,2, Tobias Hartung 1,2,Karl Jansen 2, Hernan Leovey 3, Andreas Griewank 3, Michael Müller-Preussker 1 1 Humboldt-University Berlin,
Solving joint chance constrained problems using regularization and Benders decomposition
 Solving joint chance constrained problems using regularization and Benders decomposition This paper is dedicated to Marida Bertocchi Lukáš Adam 1,2, Martin Branda 2,3, Holger Heitsch 4 and René Henrion
Solving joint chance constrained problems using regularization and Benders decomposition This paper is dedicated to Marida Bertocchi Lukáš Adam 1,2, Martin Branda 2,3, Holger Heitsch 4 and René Henrion
Mathematical Methods for Neurosciences. ENS - Master MVA Paris 6 - Master Maths-Bio ( )
") Mathematical Methods for Neurosciences. ENS - Master MVA Paris 6 - Master Maths-Bio (2014-2015) Etienne Tanré - Olivier Faugeras INRIA - Team Tosca October 22nd, 2014 E. Tanré (INRIA - Team Tosca) Mathematical
Mathematical Methods for Neurosciences. ENS - Master MVA Paris 6 - Master Maths-Bio (2014-2015) Etienne Tanré - Olivier Faugeras INRIA - Team Tosca October 22nd, 2014 E. Tanré (INRIA - Team Tosca) Mathematical
Lipschitz and differentiability properties of quasi-concave and singular normal distribution functions
 Ann Oper Res (2010) 177: 115 125 DOI 10.1007/s10479-009-0598-0 Lipschitz and differentiability properties of quasi-concave and singular normal distribution functions René Henrion Werner Römisch Published
Ann Oper Res (2010) 177: 115 125 DOI 10.1007/s10479-009-0598-0 Lipschitz and differentiability properties of quasi-concave and singular normal distribution functions René Henrion Werner Römisch Published
Asymptotics of minimax stochastic programs
 Asymptotics of minimax stochastic programs Alexander Shapiro Abstract. We discuss in this paper asymptotics of the sample average approximation (SAA) of the optimal value of a minimax stochastic programming
Asymptotics of minimax stochastic programs Alexander Shapiro Abstract. We discuss in this paper asymptotics of the sample average approximation (SAA) of the optimal value of a minimax stochastic programming
Chance Constrained Programming
 IE 495 Lecture 22 Chance Constrained Programming Prof. Jeff Linderoth April 21, 2003 April 21, 2002 Stochastic Programming Lecture 22 Slide 1 Outline HW Fixes Chance Constrained Programming Is Hard Main
IE 495 Lecture 22 Chance Constrained Programming Prof. Jeff Linderoth April 21, 2003 April 21, 2002 Stochastic Programming Lecture 22 Slide 1 Outline HW Fixes Chance Constrained Programming Is Hard Main
Constrained Optimization and Lagrangian Duality
 CIS 520: Machine Learning Oct 02, 2017 Constrained Optimization and Lagrangian Duality Lecturer: Shivani Agarwal Disclaimer: These notes are designed to be a supplement to the lecture. They may or may
CIS 520: Machine Learning Oct 02, 2017 Constrained Optimization and Lagrangian Duality Lecturer: Shivani Agarwal Disclaimer: These notes are designed to be a supplement to the lecture. They may or may
Lecture 8 Plus properties, merit functions and gap functions. September 28, 2008
 Lecture 8 Plus properties, merit functions and gap functions September 28, 2008 Outline Plus-properties and F-uniqueness Equation reformulations of VI/CPs Merit functions Gap merit functions FP-I book:
Lecture 8 Plus properties, merit functions and gap functions September 28, 2008 Outline Plus-properties and F-uniqueness Equation reformulations of VI/CPs Merit functions Gap merit functions FP-I book:
Scenario tree generation for multi-stage stochastic programs
 Scenario tree generation for multi-stage stochastic programs Holger Heitsch 1 and Werner Römisch 2 1 Humboldt University Berlin, Institute of Mathematics, 10099 Berlin, Germany, heitsch@math.hu-berlin.de
Scenario tree generation for multi-stage stochastic programs Holger Heitsch 1 and Werner Römisch 2 1 Humboldt University Berlin, Institute of Mathematics, 10099 Berlin, Germany, heitsch@math.hu-berlin.de
On deterministic reformulations of distributionally robust joint chance constrained optimization problems
 On deterministic reformulations of distributionally robust joint chance constrained optimization problems Weijun Xie and Shabbir Ahmed School of Industrial & Systems Engineering Georgia Institute of Technology,
On deterministic reformulations of distributionally robust joint chance constrained optimization problems Weijun Xie and Shabbir Ahmed School of Industrial & Systems Engineering Georgia Institute of Technology,
Valid Inequalities and Restrictions for Stochastic Programming Problems with First Order Stochastic Dominance Constraints
 Valid Inequalities and Restrictions for Stochastic Programming Problems with First Order Stochastic Dominance Constraints Nilay Noyan Andrzej Ruszczyński March 21, 2006 Abstract Stochastic dominance relations
Valid Inequalities and Restrictions for Stochastic Programming Problems with First Order Stochastic Dominance Constraints Nilay Noyan Andrzej Ruszczyński March 21, 2006 Abstract Stochastic dominance relations
Optimization Tools in an Uncertain Environment
 Optimization Tools in an Uncertain Environment Michael C. Ferris University of Wisconsin, Madison Uncertainty Workshop, Chicago: July 21, 2008 Michael Ferris (University of Wisconsin) Stochastic optimization
Optimization Tools in an Uncertain Environment Michael C. Ferris University of Wisconsin, Madison Uncertainty Workshop, Chicago: July 21, 2008 Michael Ferris (University of Wisconsin) Stochastic optimization
MIDAS: A Mixed Integer Dynamic Approximation Scheme
 MIDAS: A Mixed Integer Dynamic Approximation Scheme Andy Philpott, Faisal Wahid, Frédéric Bonnans May 7, 2016 Abstract Mixed Integer Dynamic Approximation Scheme (MIDAS) is a new sampling-based algorithm
MIDAS: A Mixed Integer Dynamic Approximation Scheme Andy Philpott, Faisal Wahid, Frédéric Bonnans May 7, 2016 Abstract Mixed Integer Dynamic Approximation Scheme (MIDAS) is a new sampling-based algorithm
Advanced Monte Carlo Methods - Computational Challenges
 Advanced Monte Carlo Methods - Computational Challenges Ivan Dimov IICT, Bulgarian Academy of Sciences Sofia, February, 2012 Aims To cover important topics from probability theory and statistics. To present
Advanced Monte Carlo Methods - Computational Challenges Ivan Dimov IICT, Bulgarian Academy of Sciences Sofia, February, 2012 Aims To cover important topics from probability theory and statistics. To present
arxiv: v2 [math.oc] 10 May 2017
![arxiv: v2 [math.oc] 10 May 2017](/thumbs/86/93348560.jpg "arxiv: v2 [math.oc] 10 May 2017") Conic Programming Reformulations of Two-Stage Distributionally Robust Linear Programs over Wasserstein Balls arxiv:1609.07505v2 [math.oc] 10 May 2017 Grani A. Hanasusanto 1 and Daniel Kuhn 2 1 Graduate
Conic Programming Reformulations of Two-Stage Distributionally Robust Linear Programs over Wasserstein Balls arxiv:1609.07505v2 [math.oc] 10 May 2017 Grani A. Hanasusanto 1 and Daniel Kuhn 2 1 Graduate
On the Scenario-Tree Optimal-Value Error for Stochastic Programming Problems
 On the Scenario-Tree Optimal-Value Error for Stochastic Programming Problems Julien Keutchayan David Munger Michel Gendreau January 2017 CIRRELT-2017-05 On the Scenario-Tree Optimal-Value Error for Stochastic
On the Scenario-Tree Optimal-Value Error for Stochastic Programming Problems Julien Keutchayan David Munger Michel Gendreau January 2017 CIRRELT-2017-05 On the Scenario-Tree Optimal-Value Error for Stochastic
Splines which are piecewise solutions of polyharmonic equation
 Splines which are piecewise solutions of polyharmonic equation Ognyan Kounchev March 25, 2006 Abstract This paper appeared in Proceedings of the Conference Curves and Surfaces, Chamonix, 1993 1 Introduction
Splines which are piecewise solutions of polyharmonic equation Ognyan Kounchev March 25, 2006 Abstract This paper appeared in Proceedings of the Conference Curves and Surfaces, Chamonix, 1993 1 Introduction
An homotopy method for exact tracking of nonlinear nonminimum phase systems: the example of the spherical inverted pendulum
 9 American Control Conference Hyatt Regency Riverfront, St. Louis, MO, USA June -, 9 FrA.5 An homotopy method for exact tracking of nonlinear nonminimum phase systems: the example of the spherical inverted
9 American Control Conference Hyatt Regency Riverfront, St. Louis, MO, USA June -, 9 FrA.5 An homotopy method for exact tracking of nonlinear nonminimum phase systems: the example of the spherical inverted
- Well-characterized problems, min-max relations, approximate certificates. - LP problems in the standard form, primal and dual linear programs
 LP-Duality ( Approximation Algorithms by V. Vazirani, Chapter 12) - Well-characterized problems, min-max relations, approximate certificates - LP problems in the standard form, primal and dual linear programs
LP-Duality ( Approximation Algorithms by V. Vazirani, Chapter 12) - Well-characterized problems, min-max relations, approximate certificates - LP problems in the standard form, primal and dual linear programs
Chance constrained optimization - applications, properties and numerical issues
 Chance constrained optimization - applications, properties and numerical issues Dr. Abebe Geletu Ilmenau University of Technology Department of Simulation and Optimal Processes (SOP) May 31, 2012 This
Chance constrained optimization - applications, properties and numerical issues Dr. Abebe Geletu Ilmenau University of Technology Department of Simulation and Optimal Processes (SOP) May 31, 2012 This
Introduction to Empirical Processes and Semiparametric Inference Lecture 08: Stochastic Convergence
 Introduction to Empirical Processes and Semiparametric Inference Lecture 08: Stochastic Convergence Michael R. Kosorok, Ph.D. Professor and Chair of Biostatistics Professor of Statistics and Operations
Introduction to Empirical Processes and Semiparametric Inference Lecture 08: Stochastic Convergence Michael R. Kosorok, Ph.D. Professor and Chair of Biostatistics Professor of Statistics and Operations
Analysis Finite and Infinite Sets The Real Numbers The Cantor Set
 Analysis Finite and Infinite Sets Definition. An initial segment is {n N n n 0 }. Definition. A finite set can be put into one-to-one correspondence with an initial segment. The empty set is also considered
Analysis Finite and Infinite Sets Definition. An initial segment is {n N n n 0 }. Definition. A finite set can be put into one-to-one correspondence with an initial segment. The empty set is also considered
Convergence of generalized entropy minimizers in sequences of convex problems
 Proceedings IEEE ISIT 206, Barcelona, Spain, 2609 263 Convergence of generalized entropy minimizers in sequences of convex problems Imre Csiszár A Rényi Institute of Mathematics Hungarian Academy of Sciences
Proceedings IEEE ISIT 206, Barcelona, Spain, 2609 263 Convergence of generalized entropy minimizers in sequences of convex problems Imre Csiszár A Rényi Institute of Mathematics Hungarian Academy of Sciences
The small ball property in Banach spaces (quantitative results)
") The small ball property in Banach spaces (quantitative results) Ehrhard Behrends Abstract A metric space (M, d) is said to have the small ball property (sbp) if for every ε 0 > 0 there exists a sequence
The small ball property in Banach spaces (quantitative results) Ehrhard Behrends Abstract A metric space (M, d) is said to have the small ball property (sbp) if for every ε 0 > 0 there exists a sequence
Linear conic optimization for nonlinear optimal control
 Linear conic optimization for nonlinear optimal control Didier Henrion 1,2,3, Edouard Pauwels 1,2 Draft of July 15, 2014 Abstract Infinite-dimensional linear conic formulations are described for nonlinear
Linear conic optimization for nonlinear optimal control Didier Henrion 1,2,3, Edouard Pauwels 1,2 Draft of July 15, 2014 Abstract Infinite-dimensional linear conic formulations are described for nonlinear
Convex Optimization & Parsimony of L p-balls representation
 Convex Optimization & Parsimony of L p -balls representation LAAS-CNRS and Institute of Mathematics, Toulouse, France IMA, January 2016 Motivation Unit balls associated with nonnegative homogeneous polynomials
Convex Optimization & Parsimony of L p -balls representation LAAS-CNRS and Institute of Mathematics, Toulouse, France IMA, January 2016 Motivation Unit balls associated with nonnegative homogeneous polynomials
ASYMPTOTIC BEHAVIOUR OF NONLINEAR ELLIPTIC SYSTEMS ON VARYING DOMAINS
 ASYMPTOTIC BEHAVIOUR OF NONLINEAR ELLIPTIC SYSTEMS ON VARYING DOMAINS Juan CASADO DIAZ ( 1 ) Adriana GARRONI ( 2 ) Abstract We consider a monotone operator of the form Au = div(a(x, Du)), with R N and
ASYMPTOTIC BEHAVIOUR OF NONLINEAR ELLIPTIC SYSTEMS ON VARYING DOMAINS Juan CASADO DIAZ ( 1 ) Adriana GARRONI ( 2 ) Abstract We consider a monotone operator of the form Au = div(a(x, Du)), with R N and
Finite-dimensional spaces. C n is the space of n-tuples x = (x 1,..., x n ) of complex numbers. It is a Hilbert space with the inner product
 of complex numbers. It is a Hilbert space with the inner product") Chapter 4 Hilbert Spaces 4.1 Inner Product Spaces Inner Product Space. A complex vector space E is called an inner product space (or a pre-hilbert space, or a unitary space) if there is a mapping (, )
Chapter 4 Hilbert Spaces 4.1 Inner Product Spaces Inner Product Space. A complex vector space E is called an inner product space (or a pre-hilbert space, or a unitary space) if there is a mapping (, )
Advanced Algorithms for Multidimensional Sensitivity Studies of Large-scale Air Pollution Models Based on Sobol Sequences
 Advanced Algorithms for Multidimensional Sensitivity Studies of Large-scale Air Pollution Models Based on Sobol Sequences I. Dimov a,, R. Georgieva a, Tz. Ostromsky a, Z. Zlatev b a Department of Parallel
Advanced Algorithms for Multidimensional Sensitivity Studies of Large-scale Air Pollution Models Based on Sobol Sequences I. Dimov a,, R. Georgieva a, Tz. Ostromsky a, Z. Zlatev b a Department of Parallel
BOUNDARY VALUE PROBLEMS ON A HALF SIERPINSKI GASKET
 BOUNDARY VALUE PROBLEMS ON A HALF SIERPINSKI GASKET WEILIN LI AND ROBERT S. STRICHARTZ Abstract. We study boundary value problems for the Laplacian on a domain Ω consisting of the left half of the Sierpinski
BOUNDARY VALUE PROBLEMS ON A HALF SIERPINSKI GASKET WEILIN LI AND ROBERT S. STRICHARTZ Abstract. We study boundary value problems for the Laplacian on a domain Ω consisting of the left half of the Sierpinski
Optimality Functions and Lopsided Convergence
 Optimality Functions and Lopsided Convergence Johannes O. Royset Operations Research Department Naval Postgraduate School joroyset@nps.edu Roger J-B Wets Department of Mathematics University of California,
Optimality Functions and Lopsided Convergence Johannes O. Royset Operations Research Department Naval Postgraduate School joroyset@nps.edu Roger J-B Wets Department of Mathematics University of California,
STAT 7032 Probability Spring Wlodek Bryc
 STAT 7032 Probability Spring 2018 Wlodek Bryc Created: Friday, Jan 2, 2014 Revised for Spring 2018 Printed: January 9, 2018 File: Grad-Prob-2018.TEX Department of Mathematical Sciences, University of Cincinnati,
STAT 7032 Probability Spring 2018 Wlodek Bryc Created: Friday, Jan 2, 2014 Revised for Spring 2018 Printed: January 9, 2018 File: Grad-Prob-2018.TEX Department of Mathematical Sciences, University of Cincinnati,
Scenario generation for stochastic optimization problems via the sparse grid method
 Scenario generation for stochastic optimization problems via the sparse grid method Michael Chen Sanjay Mehrotra Dávid Papp March 7, 0 Abstract We study the use of sparse grids methods for the scenario
Scenario generation for stochastic optimization problems via the sparse grid method Michael Chen Sanjay Mehrotra Dávid Papp March 7, 0 Abstract We study the use of sparse grids methods for the scenario
The Value of Randomized Solutions in Mixed-Integer Distributionally Robust Optimization Problems
 The Value of Randomized Solutions in Mixed-Integer Distributionally Robust Optimization Problems Erick Delage 1 and Ahmed Saif 2 1 Department of Decision Sciences, HEC Montréal 2 Department of Industrial
The Value of Randomized Solutions in Mixed-Integer Distributionally Robust Optimization Problems Erick Delage 1 and Ahmed Saif 2 1 Department of Decision Sciences, HEC Montréal 2 Department of Industrial
Robust Optimal Discrete Arc Sizing for Tree-Shaped Potential Networks
 Robust Optimal Discrete Arc Sizing for Tree-Shaped Potential Networks Martin Robinius, Lars Schewe, Martin Schmidt, Detlef Stolten, Johannes Thürauf, Lara Welder Abstract. We consider the problem of discrete
Robust Optimal Discrete Arc Sizing for Tree-Shaped Potential Networks Martin Robinius, Lars Schewe, Martin Schmidt, Detlef Stolten, Johannes Thürauf, Lara Welder Abstract. We consider the problem of discrete
Importance Sampling to Accelerate the Convergence of Quasi-Monte Carlo
 Importance Sampling to Accelerate the Convergence of Quasi-Monte Carlo Wolfgang Hörmann, Josef Leydold Department of Statistics and Mathematics Wirtschaftsuniversität Wien Research Report Series Report
Importance Sampling to Accelerate the Convergence of Quasi-Monte Carlo Wolfgang Hörmann, Josef Leydold Department of Statistics and Mathematics Wirtschaftsuniversität Wien Research Report Series Report
is a Borel subset of S Θ for each c R (Bertsekas and Shreve, 1978, Proposition 7.36) This always holds in practical applications.
 This always holds in practical applications.") Stat 811 Lecture Notes The Wald Consistency Theorem Charles J. Geyer April 9, 01 1 Analyticity Assumptions Let { f θ : θ Θ } be a family of subprobability densities 1 with respect to a measure µ on a measurable
Stat 811 Lecture Notes The Wald Consistency Theorem Charles J. Geyer April 9, 01 1 Analyticity Assumptions Let { f θ : θ Θ } be a family of subprobability densities 1 with respect to a measure µ on a measurable
Convex relaxations of chance constrained optimization problems
 Convex relaxations of chance constrained optimization problems Shabbir Ahmed School of Industrial & Systems Engineering, Georgia Institute of Technology, 765 Ferst Drive, Atlanta, GA 30332. May 12, 2011
Convex relaxations of chance constrained optimization problems Shabbir Ahmed School of Industrial & Systems Engineering, Georgia Institute of Technology, 765 Ferst Drive, Atlanta, GA 30332. May 12, 2011
THEOREMS, ETC., FOR MATH 516
 THEOREMS, ETC., FOR MATH 516 Results labeled Theorem Ea.b.c (or Proposition Ea.b.c, etc.) refer to Theorem c from section a.b of Evans book (Partial Differential Equations). Proposition 1 (=Proposition
THEOREMS, ETC., FOR MATH 516 Results labeled Theorem Ea.b.c (or Proposition Ea.b.c, etc.) refer to Theorem c from section a.b of Evans book (Partial Differential Equations). Proposition 1 (=Proposition
HW1 solutions. 1. α Ef(x) β, where Ef(x) is the expected value of f(x), i.e., Ef(x) = n. i=1 p if(a i ). (The function f : R R is given.
 β, where Ef(x) is the expected value of f(x), i.e., Ef(x) = n. i=1 p if(a i ). (The function f : R R is given.") HW1 solutions Exercise 1 (Some sets of probability distributions.) Let x be a real-valued random variable with Prob(x = a i ) = p i, i = 1,..., n, where a 1 < a 2 < < a n. Of course p R n lies in the standard
HW1 solutions Exercise 1 (Some sets of probability distributions.) Let x be a real-valued random variable with Prob(x = a i ) = p i, i = 1,..., n, where a 1 < a 2 < < a n. Of course p R n lies in the standard
Individual confidence intervals for true solutions to stochastic variational inequalities
 . manuscript o. 2will be inserted by the editor Michael Lamm et al. Individual confidence intervals for true solutions to stochastic variational inequalities Michael Lamm Shu Lu Amarjit Budhiraja. Received:
. manuscript o. 2will be inserted by the editor Michael Lamm et al. Individual confidence intervals for true solutions to stochastic variational inequalities Michael Lamm Shu Lu Amarjit Budhiraja. Received:
Lecture 21: Counting and Sampling Problems
 princeton univ. F 14 cos 521: Advanced Algorithm Design Lecture 21: Counting and Sampling Problems Lecturer: Sanjeev Arora Scribe: Today s topic of counting and sampling problems is motivated by computational
princeton univ. F 14 cos 521: Advanced Algorithm Design Lecture 21: Counting and Sampling Problems Lecturer: Sanjeev Arora Scribe: Today s topic of counting and sampling problems is motivated by computational
A note on the σ-algebra of cylinder sets and all that
 A note on the σ-algebra of cylinder sets and all that José Luis Silva CCM, Univ. da Madeira, P-9000 Funchal Madeira BiBoS, Univ. of Bielefeld, Germany (luis@dragoeiro.uma.pt) September 1999 Abstract In
A note on the σ-algebra of cylinder sets and all that José Luis Silva CCM, Univ. da Madeira, P-9000 Funchal Madeira BiBoS, Univ. of Bielefeld, Germany (luis@dragoeiro.uma.pt) September 1999 Abstract In
A notion of Total Dual Integrality for Convex, Semidefinite and Extended Formulations
 A notion of for Convex, Semidefinite and Extended Formulations Marcel de Carli Silva Levent Tunçel April 26, 2018 A vector in R n is integral if each of its components is an integer, A vector in R n is
A notion of for Convex, Semidefinite and Extended Formulations Marcel de Carli Silva Levent Tunçel April 26, 2018 A vector in R n is integral if each of its components is an integer, A vector in R n is
Empirical Processes: General Weak Convergence Theory
 Empirical Processes: General Weak Convergence Theory Moulinath Banerjee May 18, 2010 1 Extended Weak Convergence The lack of measurability of the empirical process with respect to the sigma-field generated
Empirical Processes: General Weak Convergence Theory Moulinath Banerjee May 18, 2010 1 Extended Weak Convergence The lack of measurability of the empirical process with respect to the sigma-field generated
Probability and Measure
 Part II Year 2018 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2018 84 Paper 4, Section II 26J Let (X, A) be a measurable space. Let T : X X be a measurable map, and µ a probability
Part II Year 2018 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2018 84 Paper 4, Section II 26J Let (X, A) be a measurable space. Let T : X X be a measurable map, and µ a probability
Applied Analysis (APPM 5440): Final exam 1:30pm 4:00pm, Dec. 14, Closed books.
: Final exam 1:30pm 4:00pm, Dec. 14, Closed books.") Applied Analysis APPM 44: Final exam 1:3pm 4:pm, Dec. 14, 29. Closed books. Problem 1: 2p Set I = [, 1]. Prove that there is a continuous function u on I such that 1 ux 1 x sin ut 2 dt = cosx, x I. Define
Applied Analysis APPM 44: Final exam 1:3pm 4:pm, Dec. 14, 29. Closed books. Problem 1: 2p Set I = [, 1]. Prove that there is a continuous function u on I such that 1 ux 1 x sin ut 2 dt = cosx, x I. Define
Scenario Grouping and Decomposition Algorithms for Chance-constrained Programs
 Scenario Grouping and Decomposition Algorithms for Chance-constrained Programs Siqian Shen Dept. of Industrial and Operations Engineering University of Michigan Joint work with Yan Deng (UMich, Google)
Scenario Grouping and Decomposition Algorithms for Chance-constrained Programs Siqian Shen Dept. of Industrial and Operations Engineering University of Michigan Joint work with Yan Deng (UMich, Google)
Mixed-Integer Nonlinear Programming
 Mixed-Integer Nonlinear Programming Claudia D Ambrosio CNRS researcher LIX, École Polytechnique, France pictures taken from slides by Leo Liberti MPRO PMA 2016-2017 Motivating Applications Nonlinear Knapsack
Mixed-Integer Nonlinear Programming Claudia D Ambrosio CNRS researcher LIX, École Polytechnique, France pictures taken from slides by Leo Liberti MPRO PMA 2016-2017 Motivating Applications Nonlinear Knapsack
Convergence rates of moment-sum-of-squares hierarchies for volume approximation of semialgebraic sets
 Convergence rates of moment-sum-of-squares hierarchies for volume approximation of semialgebraic sets Milan Korda 1, Didier Henrion,3,4 Draft of December 1, 016 Abstract Moment-sum-of-squares hierarchies
Convergence rates of moment-sum-of-squares hierarchies for volume approximation of semialgebraic sets Milan Korda 1, Didier Henrion,3,4 Draft of December 1, 016 Abstract Moment-sum-of-squares hierarchies
If we want to analyze experimental or simulated data we might encounter the following tasks:
 Chapter 1 Introduction If we want to analyze experimental or simulated data we might encounter the following tasks: Characterization of the source of the signal and diagnosis Studying dependencies Prediction
Chapter 1 Introduction If we want to analyze experimental or simulated data we might encounter the following tasks: Characterization of the source of the signal and diagnosis Studying dependencies Prediction