Direct Sum. McKelvey, and Madie Wilkin Adviser: Dr. Andrew Christlieb Co-advisers: Eric Wolf and Justin Droba. July 23, Michigan St.
|
|
|
- Theodore Webster
- 5 years ago
- Views:
Transcription
1 and Adviser: Dr. Andrew Christlieb Co-advisers: Eric Wolf and Justin Droba Michigan St. University July 23, 2014
2 The N-Body Problem Solar systems
3 The N-Body Problem Solar systems Interacting charges, gases and plasma
4 The N-Body Problem Solar systems Interacting charges, gases and plasma We want to solve the system of ODE s given by: dx i dt = v i dv i dt = a i = F i(x 1,..., x n ) m i for i = 1,..., n.
5 Traditional Solutions Particle Mesh Particle-Particle Particle-Mesh
6 The net force on particle i is: F i = n q i E j,i j=1 j i
7 The net force on particle i is: F i = n q i E j,i j=1 j i E j,i is the electric field from particle j at the location of particle i and q i is the charge
8 The net force on particle i is: F i = n q i E j,i j=1 j i E j,i is the electric field from particle j at the location of particle i and q i is the charge To calculate the force on all of the particles, we must repeat this summation for each of the n particles
9 The net force on particle i is: F i = n q i E j,i j=1 j i E j,i is the electric field from particle j at the location of particle i and q i is the charge To calculate the force on all of the particles, we must repeat this summation for each of the n particles The problem with direct sum is that it is O(N 2 )
10 Goal Find efficient ways to solve the n-body problem.
11 Goal Find efficient ways to solve the n-body problem. Improve efficiency from O(n 2 ) to O(n) + O(k 2 ) where k << n and k is the number of particles per cell. Table: Theoretical Time Comparison (3600 MHz computer) E j,i = q j ɛ 0 G(x j x i ) F j,i = q i E j,i N O(N 2 ) O(N) sec 10 9 sec sec 10 7 sec min 10 4 sec yrs.28 sec yrs 4.6 min
12 We are working on it. We made a Finite Difference Mesh based method, which is a variation of the Particle-Particle Particle-Mesh method, that improved efficiency from O(n 2 ) to approximately O(n)
13 We are working on it. We made a Finite Difference Mesh based method, which is a variation of the Particle-Particle Particle-Mesh method, that improved efficiency from O(n 2 ) to approximately O(n) We want to compute the field on the particles quickly
14 We are working on it. We made a Finite Difference Mesh based method, which is a variation of the Particle-Particle Particle-Mesh method, that improved efficiency from O(n 2 ) to approximately O(n) We want to compute the field on the particles quickly
15 x (n) i, v (n 1/2) i Interpolate ρ (n) x (n+1) i Leapfrog v (n 1/2) i Poisson Solve Leapfrog φ (n) Finite E (n) Interpolate a (n) Difference i
16 x (n) i, v (n 1/2) i Interpolate ρ (n) x (n+1) i Leapfrog v (n 1/2) i Poisson Solve Leapfrog φ (n) Boundary E (n) Interpolate Integral a (n) i Corrected
17 Using Finite Difference to Solve ( x, ȳ + h) ( x h, ȳ) ( x + h, ȳ) ( x, ȳ h) Five-Point Stencil ( x, ȳ + h) ( x h, ȳ + h) ( x + h, ȳ + h) ( x h, ȳ) ( x + h, ȳ) ( x h, ȳ h) ( x, ȳ h) ( x + h, ȳ h) Nine-Point Stencil
18 Using Finite Difference to Solve ( x, ȳ + h) ( x h, ȳ) ( x + h, ȳ) ( x, ȳ h) Five-Point Stencil 2 φ = xx φ + yy φ ( x, ȳ + h) ( x h, ȳ + h) ( x + h, ȳ + h) ( x h, ȳ) ( x + h, ȳ) ( x h, ȳ h) ( x, ȳ h) ( x + h, ȳ h) Nine-Point Stencil
19 Using Finite Difference to Solve ( x h, ȳ) ( x, ȳ + h) ( x, ȳ h) ( x + h, ȳ) ( x, ȳ + h) ( x h, ȳ + h) ( x + h, ȳ + h) ( x h, ȳ) ( x + h, ȳ) ( x h, ȳ h) ( x, ȳ h) ( x + h, ȳ h) Five-Point Stencil Nine-Point Stencil 2 φ = xx φ + yy φ 2 φ = φ j+1,k 2φ j,k +φ j 1,k + φj,k+1 2φ j,k +φ j,k 1 + O( x 2 + y 2 ) ( x) 2 ( y) 2 where j is the index for x and k is the index for y
20 Using Finite Difference to Solve ( x h, ȳ) ( x, ȳ + h) ( x, ȳ h) ( x + h, ȳ) Five-Point Stencil 2 φ = xx φ + yy φ 2 φ = φ j+1,k 2φ j,k +φ j 1,k ( x) 2 ( x, ȳ + h) ( x h, ȳ + h) ( x + h, ȳ + h) ( x h, ȳ) ( x + h, ȳ) ( x h, ȳ h) ( x, ȳ h) ( x + h, ȳ h) Nine-Point Stencil + φj,k+1 2φ j,k +φ j,k 1 ( y) 2 + O( x 2 + y 2 ) where j is the index for x and k is the index for y A φ = ρ
21 Using Finite Difference to Solve ( x h, ȳ) ( x, ȳ + h) ( x, ȳ h) ( x + h, ȳ) Five-Point Stencil 2 φ = xx φ + yy φ 2 φ = φ j+1,k 2φ j,k +φ j 1,k ( x) 2 ( x, ȳ + h) ( x h, ȳ + h) ( x + h, ȳ + h) ( x h, ȳ) ( x + h, ȳ) ( x h, ȳ h) ( x, ȳ h) ( x + h, ȳ h) Nine-Point Stencil + φj,k+1 2φ j,k +φ j,k 1 ( y) 2 + O( x 2 + y 2 ) where j is the index for x and k is the index for y A φ = ρ E y (x, y) = φ(x,y+h) φ(x,y h) 2h, E x (x, y) = φ(x+h,y) φ(x h,y) 2h
22 Acceleration is used to find the velocity at t = n +.5
23 Acceleration is used to find the velocity at t = n +.5 That velocity is then used to find the position of each particle at t = n + 1
24 Acceleration is used to find the velocity at t = n +.5 That velocity is then used to find the position of each particle at t = n + 1 This is the leapfrog algorithm
25 Acceleration is used to find the velocity at t = n +.5 That velocity is then used to find the position of each particle at t = n + 1 This is the leapfrog algorithm v 1/2 = v 0 + a 0 dt 2 v n+1/2 = v n 1/2 + a n dt x n = x n 1 + v n 1/2 dt
26 Deriving Green s Identity φ(x) = N i=1 G(x i x 0 ) (G(x x 0 ) φ φ G(x x 0 )) nds V
27 Deriving Green s Identity φ(x) = N i=1 G(x i x 0 ) (G(x x 0 ) φ φ G(x x 0 )) nds V V F dv = V F nds
28 Deriving Green s Identity φ(x) = N i=1 G(x i x 0 ) (G(x x 0 ) φ φ G(x x 0 )) nds V V F dv = V F nds Let F = θγ where θ is a scalar function, γ = ψ is a vector function. ( θ 2 ψ + θ ψ ) dv = (θ ψ n) ds V V
29 Deriving Green s Identity φ(x) = N i=1 G(x i x 0 ) (G(x x 0 ) φ φ G(x x 0 )) nds V V F dv = V F nds Let F = θγ where θ is a scalar function, γ = ψ is a vector function. ( θ 2 ψ + θ ψ ) dv = (θ ψ n) ds V V If we let θ = G(x x 0 ) and ψ = φ, then we can solve for the potential φ(x)
30 We can use the fact that ρ = N δ(x x i ) i=1
31 We can use the fact that ρ = N δ(x x i ) i=1 We can solve for φ to obtain: φ(x) = N i=1 G(x i x 0 ) (G φ φ G) nds V
32 We can use the fact that ρ = N δ(x x i ) i=1 We can solve for φ to obtain: φ(x) = N i=1 G(x i x 0 ) (G φ φ G) nds V φ x,j = N i=1 i j 1 2π ln ( x i x j 2 ) + Ω (φ G G φ) n ds
33 We can use the fact that ρ = N δ(x x i ) i=1 We can solve for φ to obtain: φ(x) = N i=1 G(x i x 0 ) (G φ φ G) nds V φ x,j = N i=1 i j 1 2π ln ( x i x j 2 ) + Ω (φ G G φ) n ds New equation because Potential Theory tells us it is the same φ x,j = N i=1 i j 1 2π ln ( x i x j 2 ) + Ω σ s(y)g (x j y) ds(y)
34 We can use the fact that ρ = N δ(x x i ) i=1 We can solve for φ to obtain: φ(x) = N i=1 G(x i x 0 ) (G φ φ G) nds V φ x,j = N i=1 i j 1 2π ln ( x i x j 2 ) + Ω (φ G G φ) n ds New equation because Potential Theory tells us it is the same φ x,j = N i=1 i j 1 2π ln ( x i x j 2 ) + Ω σ s(y)g (x j y) ds(y) σ is like a surface charge
35 We use direct sum to calculate the field due to local particles
36 We use direct sum to calculate the field due to local particles In order to evaluate the boundary integral, we solve using numerical quadrature.
37 We use direct sum to calculate the field due to local particles In order to evaluate the boundary integral, we solve using numerical quadrature. We end up with a matrix that we have to invert to obtain the surface charge.
38 We use direct sum to calculate the field due to local particles In order to evaluate the boundary integral, we solve using numerical quadrature. We end up with a matrix that we have to invert to obtain the surface charge. Then, instead of doing this everywhere which would be O(n 2 ), we make this a subcell method which gives O(n) + O(k 2 ).
39 Solving for Sigma s2 s 1 σg ds
40 Solving for Sigma s2 s 1 σg ds We take a limit to the boundary with respect to variable x and get the integral equation
41 Solving for Sigma s2 s 1 σg ds We take a limit to the boundary with respect to variable x and get the integral equation We turn the integral into discrete approximations that we can solve
42 Solving for Sigma s2 s 1 σg ds We take a limit to the boundary with respect to variable x and get the integral equation We turn the integral into discrete approximations that we can solve The integral becomes four sums
43 Solving for Sigma s2 s 1 σg ds We take a limit to the boundary with respect to variable x and get the integral equation We turn the integral into discrete approximations that we can solve The integral becomes four sums We use integral mean value theorem and trapezoid rule to end up with the Green s matrix 4k i=1 s2 s 1 σg ds
44 Solving for Sigma s2 s 1 σg ds We take a limit to the boundary with respect to variable x and get the integral equation We turn the integral into discrete approximations that we can solve The integral becomes four sums We use integral mean value theorem and trapezoid rule to end up with the Green s matrix 4k i=1 s2 s 1 σg ds Then we end up with a system of equations in which we need to perform a Green s matrix inversion
45 In order to get the Boundary Integral Corrected Electric Fields we need several things
46 In order to get the Boundary Integral Corrected Electric Fields we need several things List of all particles inside the cell
47 List of all particles in boundary cells
48 Potential at all 12 border points per cell
49 Something to take the above and calculate the electric field
50 For loop over all cells
51 For loop over all cells If we can get this done, then it s a matter of increasing customizability
52

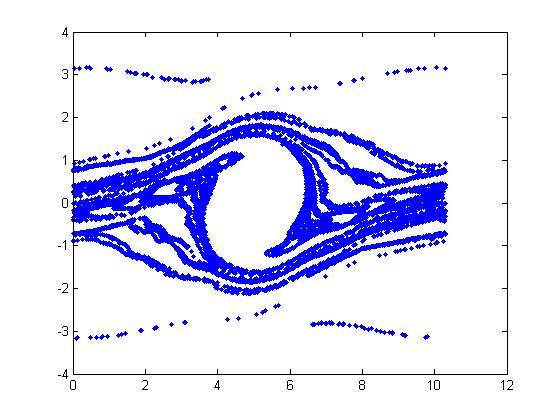
53 Figure: Uncorrected

54 Figure: Point charge at the center
MATH 425, FINAL EXAM SOLUTIONS
 MATH 425, FINAL EXAM SOLUTIONS Each exercise is worth 50 points. Exercise. a The operator L is defined on smooth functions of (x, y by: Is the operator L linear? Prove your answer. L (u := arctan(xy u
MATH 425, FINAL EXAM SOLUTIONS Each exercise is worth 50 points. Exercise. a The operator L is defined on smooth functions of (x, y by: Is the operator L linear? Prove your answer. L (u := arctan(xy u
Coordinate systems and vectors in three spatial dimensions
 PHYS2796 Introduction to Modern Physics (Spring 2015) Notes on Mathematics Prerequisites Jim Napolitano, Department of Physics, Temple University January 7, 2015 This is a brief summary of material on
PHYS2796 Introduction to Modern Physics (Spring 2015) Notes on Mathematics Prerequisites Jim Napolitano, Department of Physics, Temple University January 7, 2015 This is a brief summary of material on
Math 4263 Homework Set 1
 Homework Set 1 1. Solve the following PDE/BVP 2. Solve the following PDE/BVP 2u t + 3u x = 0 u (x, 0) = sin (x) u x + e x u y = 0 u (0, y) = y 2 3. (a) Find the curves γ : t (x (t), y (t)) such that that
Homework Set 1 1. Solve the following PDE/BVP 2. Solve the following PDE/BVP 2u t + 3u x = 0 u (x, 0) = sin (x) u x + e x u y = 0 u (0, y) = y 2 3. (a) Find the curves γ : t (x (t), y (t)) such that that
Block-Structured Adaptive Mesh Refinement
 Block-Structured Adaptive Mesh Refinement Lecture 2 Incompressible Navier-Stokes Equations Fractional Step Scheme 1-D AMR for classical PDE s hyperbolic elliptic parabolic Accuracy considerations Bell
Block-Structured Adaptive Mesh Refinement Lecture 2 Incompressible Navier-Stokes Equations Fractional Step Scheme 1-D AMR for classical PDE s hyperbolic elliptic parabolic Accuracy considerations Bell
n 1 f n 1 c 1 n+1 = c 1 n $ c 1 n 1. After taking logs, this becomes
 Root finding: 1 a The points {x n+1, }, {x n, f n }, {x n 1, f n 1 } should be co-linear Say they lie on the line x + y = This gives the relations x n+1 + = x n +f n = x n 1 +f n 1 = Eliminating α and
Root finding: 1 a The points {x n+1, }, {x n, f n }, {x n 1, f n 1 } should be co-linear Say they lie on the line x + y = This gives the relations x n+1 + = x n +f n = x n 1 +f n 1 = Eliminating α and
Math 265H: Calculus III Practice Midterm II: Fall 2014
 Name: Section #: Math 65H: alculus III Practice Midterm II: Fall 14 Instructions: This exam has 7 problems. The number of points awarded for each question is indicated in the problem. Answer each question
Name: Section #: Math 65H: alculus III Practice Midterm II: Fall 14 Instructions: This exam has 7 problems. The number of points awarded for each question is indicated in the problem. Answer each question
SOLUTIONS TO THE FINAL EXAM. December 14, 2010, 9:00am-12:00 (3 hours)
") SOLUTIONS TO THE 18.02 FINAL EXAM BJORN POONEN December 14, 2010, 9:00am-12:00 (3 hours) 1) For each of (a)-(e) below: If the statement is true, write TRUE. If the statement is false, write FALSE. (Please
SOLUTIONS TO THE 18.02 FINAL EXAM BJORN POONEN December 14, 2010, 9:00am-12:00 (3 hours) 1) For each of (a)-(e) below: If the statement is true, write TRUE. If the statement is false, write FALSE. (Please
Lecture 3: Vectors. Any set of numbers that transform under a rotation the same way that a point in space does is called a vector.
 Lecture 3: Vectors Any set of numbers that transform under a rotation the same way that a point in space does is called a vector i.e., A = λ A i ij j j In earlier courses, you may have learned that a vector
Lecture 3: Vectors Any set of numbers that transform under a rotation the same way that a point in space does is called a vector i.e., A = λ A i ij j j In earlier courses, you may have learned that a vector
DIFFERENTIATION RULES
 3 DIFFERENTIATION RULES DIFFERENTIATION RULES We have: Seen how to interpret derivatives as slopes and rates of change Seen how to estimate derivatives of functions given by tables of values Learned how
3 DIFFERENTIATION RULES DIFFERENTIATION RULES We have: Seen how to interpret derivatives as slopes and rates of change Seen how to estimate derivatives of functions given by tables of values Learned how
2.20 Fall 2018 Math Review
 2.20 Fall 2018 Math Review September 10, 2018 These notes are to help you through the math used in this class. This is just a refresher, so if you never learned one of these topics you should look more
2.20 Fall 2018 Math Review September 10, 2018 These notes are to help you through the math used in this class. This is just a refresher, so if you never learned one of these topics you should look more
Electrodynamics PHY712. Lecture 4 Electrostatic potentials and fields. Reference: Chap. 1 & 2 in J. D. Jackson s textbook.
 Electrodynamics PHY712 Lecture 4 Electrostatic potentials and fields Reference: Chap. 1 & 2 in J. D. Jackson s textbook. 1. Complete proof of Green s Theorem 2. Proof of mean value theorem for electrostatic
Electrodynamics PHY712 Lecture 4 Electrostatic potentials and fields Reference: Chap. 1 & 2 in J. D. Jackson s textbook. 1. Complete proof of Green s Theorem 2. Proof of mean value theorem for electrostatic
MA 441 Advanced Engineering Mathematics I Assignments - Spring 2014
 MA 441 Advanced Engineering Mathematics I Assignments - Spring 2014 Dr. E. Jacobs The main texts for this course are Calculus by James Stewart and Fundamentals of Differential Equations by Nagle, Saff
MA 441 Advanced Engineering Mathematics I Assignments - Spring 2014 Dr. E. Jacobs The main texts for this course are Calculus by James Stewart and Fundamentals of Differential Equations by Nagle, Saff
Diffusion of a density in a static fluid
 Diffusion of a density in a static fluid u(x, y, z, t), density (M/L 3 ) of a substance (dye). Diffusion: motion of particles from places where the density is higher to places where it is lower, due to
Diffusion of a density in a static fluid u(x, y, z, t), density (M/L 3 ) of a substance (dye). Diffusion: motion of particles from places where the density is higher to places where it is lower, due to
Chapter 1. Introduction to Electrostatics
 Chapter. Introduction to Electrostatics. Electric charge, Coulomb s Law, and Electric field Electric charge Fundamental and characteristic property of the elementary particles There are two and only two
Chapter. Introduction to Electrostatics. Electric charge, Coulomb s Law, and Electric field Electric charge Fundamental and characteristic property of the elementary particles There are two and only two
Name Class. (a) (b) (c) 4 t4 3 C
 (b) (c) 4 t4 3 C") Chapter 4 Test Bank 77 Test Form A Chapter 4 Name Class Date Section. Evaluate the integral: t dt. t C (a) (b) 4 t4 C t C C t. Evaluate the integral: 5 sec x tan x dx. (a) 5 sec x tan x C (b) 5 sec x C
Chapter 4 Test Bank 77 Test Form A Chapter 4 Name Class Date Section. Evaluate the integral: t dt. t C (a) (b) 4 t4 C t C C t. Evaluate the integral: 5 sec x tan x dx. (a) 5 sec x tan x C (b) 5 sec x C
and in each case give the range of values of x for which the expansion is valid.
 α β γ δ ε ζ η θ ι κ λ µ ν ξ ο π ρ σ τ υ ϕ χ ψ ω Mathematics is indeed dangerous in that it absorbs students to such a degree that it dulls their senses to everything else P Kraft Further Maths A (MFPD)
α β γ δ ε ζ η θ ι κ λ µ ν ξ ο π ρ σ τ υ ϕ χ ψ ω Mathematics is indeed dangerous in that it absorbs students to such a degree that it dulls their senses to everything else P Kraft Further Maths A (MFPD)
Solving the Generalized Poisson Equation Using the Finite-Difference Method (FDM)
") Solving the Generalized Poisson Equation Using the Finite-Difference Method (FDM) James R. Nagel September 30, 2009 1 Introduction Numerical simulation is an extremely valuable tool for those who wish
Solving the Generalized Poisson Equation Using the Finite-Difference Method (FDM) James R. Nagel September 30, 2009 1 Introduction Numerical simulation is an extremely valuable tool for those who wish
Multiple Integrals and Vector Calculus: Synopsis
 Multiple Integrals and Vector Calculus: Synopsis Hilary Term 28: 14 lectures. Steve Rawlings. 1. Vectors - recap of basic principles. Things which are (and are not) vectors. Differentiation and integration
Multiple Integrals and Vector Calculus: Synopsis Hilary Term 28: 14 lectures. Steve Rawlings. 1. Vectors - recap of basic principles. Things which are (and are not) vectors. Differentiation and integration
1. The accumulated net change function or area-so-far function
 Name: Section: Names of collaborators: Main Points: 1. The accumulated net change function ( area-so-far function) 2. Connection to antiderivative functions: the Fundamental Theorem of Calculus 3. Evaluating
Name: Section: Names of collaborators: Main Points: 1. The accumulated net change function ( area-so-far function) 2. Connection to antiderivative functions: the Fundamental Theorem of Calculus 3. Evaluating
Numerical Green s Function Techniques
 Numerical Green s Function Techniques Andrew J. Christlieb University Department of This work supported by AFOSR and AFRL. Co-Workers Senior Collaborators Iain Boyd (U Mich) Jean-Luc Cambier (AFRL: Edward
Numerical Green s Function Techniques Andrew J. Christlieb University Department of This work supported by AFOSR and AFRL. Co-Workers Senior Collaborators Iain Boyd (U Mich) Jean-Luc Cambier (AFRL: Edward
Essential Mathematics 2 Introduction to the calculus
 Essential Mathematics Introduction to the calculus As you will alrea know, the calculus may be broadly separated into two major parts. The first part the Differential Calculus is concerned with finding
Essential Mathematics Introduction to the calculus As you will alrea know, the calculus may be broadly separated into two major parts. The first part the Differential Calculus is concerned with finding
Starting from Heat Equation
 Department of Applied Mathematics National Chiao Tung University Hsin-Chu 30010, TAIWAN 20th August 2009 Analytical Theory of Heat The differential equations of the propagation of heat express the most
Department of Applied Mathematics National Chiao Tung University Hsin-Chu 30010, TAIWAN 20th August 2009 Analytical Theory of Heat The differential equations of the propagation of heat express the most
Lecture No 1 Introduction to Diffusion equations The heat equat
 Lecture No 1 Introduction to Diffusion equations The heat equation Columbia University IAS summer program June, 2009 Outline of the lectures We will discuss some basic models of diffusion equations and
Lecture No 1 Introduction to Diffusion equations The heat equation Columbia University IAS summer program June, 2009 Outline of the lectures We will discuss some basic models of diffusion equations and
Partial Differential Equations
 Partial Differential Equations Xu Chen Assistant Professor United Technologies Engineering Build, Rm. 382 Department of Mechanical Engineering University of Connecticut xchen@engr.uconn.edu Contents 1
Partial Differential Equations Xu Chen Assistant Professor United Technologies Engineering Build, Rm. 382 Department of Mechanical Engineering University of Connecticut xchen@engr.uconn.edu Contents 1
u xx + u yy = 0. (5.1)
") Chapter 5 Laplace Equation The following equation is called Laplace equation in two independent variables x, y: The non-homogeneous problem u xx + u yy =. (5.1) u xx + u yy = F, (5.) where F is a function
Chapter 5 Laplace Equation The following equation is called Laplace equation in two independent variables x, y: The non-homogeneous problem u xx + u yy =. (5.1) u xx + u yy = F, (5.) where F is a function
1MA6 Partial Differentiation and Multiple Integrals: I
 1MA6/1 1MA6 Partial Differentiation and Multiple Integrals: I Dr D W Murray Michaelmas Term 1994 1. Total differential. (a) State the conditions for the expression P (x, y)dx+q(x, y)dy to be the perfect
1MA6/1 1MA6 Partial Differentiation and Multiple Integrals: I Dr D W Murray Michaelmas Term 1994 1. Total differential. (a) State the conditions for the expression P (x, y)dx+q(x, y)dy to be the perfect
ENGI Multiple Integration Page 8-01
 ENGI 345 8. Multiple Integration Page 8-01 8. Multiple Integration This chapter provides only a very brief introduction to the major topic of multiple integration. Uses of multiple integration include
ENGI 345 8. Multiple Integration Page 8-01 8. Multiple Integration This chapter provides only a very brief introduction to the major topic of multiple integration. Uses of multiple integration include
Exact Solutions of the Einstein Equations
 Notes from phz 6607, Special and General Relativity University of Florida, Fall 2004, Detweiler Exact Solutions of the Einstein Equations These notes are not a substitute in any manner for class lectures.
Notes from phz 6607, Special and General Relativity University of Florida, Fall 2004, Detweiler Exact Solutions of the Einstein Equations These notes are not a substitute in any manner for class lectures.
= π + sin π = π + 0 = π, so the object is moving at a speed of π feet per second after π seconds. (c) How far does it go in π seconds?
 How far does it go in π seconds?") Mathematics 115 Professor Alan H. Stein April 18, 005 SOLUTIONS 1. Define what is meant by an antiderivative or indefinite integral of a function f(x). Solution: An antiderivative or indefinite integral
Mathematics 115 Professor Alan H. Stein April 18, 005 SOLUTIONS 1. Define what is meant by an antiderivative or indefinite integral of a function f(x). Solution: An antiderivative or indefinite integral
Integration Techniques
 Review for the Final Exam - Part - Solution Math Name Quiz Section The following problems should help you review for the final exam. Don t hesitate to ask for hints if you get stuck. Integration Techniques.
Review for the Final Exam - Part - Solution Math Name Quiz Section The following problems should help you review for the final exam. Don t hesitate to ask for hints if you get stuck. Integration Techniques.
Mathematical Tripos Part IA Lent Term Example Sheet 1. Calculate its tangent vector dr/du at each point and hence find its total length.
 Mathematical Tripos Part IA Lent Term 205 ector Calculus Prof B C Allanach Example Sheet Sketch the curve in the plane given parametrically by r(u) = ( x(u), y(u) ) = ( a cos 3 u, a sin 3 u ) with 0 u
Mathematical Tripos Part IA Lent Term 205 ector Calculus Prof B C Allanach Example Sheet Sketch the curve in the plane given parametrically by r(u) = ( x(u), y(u) ) = ( a cos 3 u, a sin 3 u ) with 0 u
Introduction to Electrostatics
 Chapter 1 Introduction to Electrostatics Problem Set #1: 1.5, 1.7, 1.12 (Due Monday Feb. 11th) 1.1 Electric field Coulomb showed experimentally that for two point charges the force is -proportionaltoeachofthecharges,
Chapter 1 Introduction to Electrostatics Problem Set #1: 1.5, 1.7, 1.12 (Due Monday Feb. 11th) 1.1 Electric field Coulomb showed experimentally that for two point charges the force is -proportionaltoeachofthecharges,
High Order Semi-Lagrangian WENO scheme for Vlasov Equations
 High Order WENO scheme for Equations Department of Mathematical and Computer Science Colorado School of Mines joint work w/ Andrew Christlieb Supported by AFOSR. Computational Mathematics Seminar, UC Boulder
High Order WENO scheme for Equations Department of Mathematical and Computer Science Colorado School of Mines joint work w/ Andrew Christlieb Supported by AFOSR. Computational Mathematics Seminar, UC Boulder
Scientific Computing I
 Scientific Computing I Module 8: An Introduction to Finite Element Methods Tobias Neckel Winter 2013/2014 Module 8: An Introduction to Finite Element Methods, Winter 2013/2014 1 Part I: Introduction to
Scientific Computing I Module 8: An Introduction to Finite Element Methods Tobias Neckel Winter 2013/2014 Module 8: An Introduction to Finite Element Methods, Winter 2013/2014 1 Part I: Introduction to
Chapter Two: Numerical Methods for Elliptic PDEs. 1 Finite Difference Methods for Elliptic PDEs
 Chapter Two: Numerical Methods for Elliptic PDEs Finite Difference Methods for Elliptic PDEs.. Finite difference scheme. We consider a simple example u := subject to Dirichlet boundary conditions ( ) u
Chapter Two: Numerical Methods for Elliptic PDEs Finite Difference Methods for Elliptic PDEs.. Finite difference scheme. We consider a simple example u := subject to Dirichlet boundary conditions ( ) u
MATH MIDTERM 4 - SOME REVIEW PROBLEMS WITH SOLUTIONS Calculus, Fall 2017 Professor: Jared Speck. Problem 1. Approximate the integral
 MATH 8. - MIDTERM 4 - SOME REVIEW PROBLEMS WITH SOLUTIONS 8. Calculus, Fall 7 Professor: Jared Speck Problem. Approimate the integral 4 d using first Simpson s rule with two equal intervals and then the
MATH 8. - MIDTERM 4 - SOME REVIEW PROBLEMS WITH SOLUTIONS 8. Calculus, Fall 7 Professor: Jared Speck Problem. Approimate the integral 4 d using first Simpson s rule with two equal intervals and then the
Scientific Computing WS 2017/2018. Lecture 18. Jürgen Fuhrmann Lecture 18 Slide 1
 Scientific Computing WS 2017/2018 Lecture 18 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 18 Slide 1 Lecture 18 Slide 2 Weak formulation of homogeneous Dirichlet problem Search u H0 1 (Ω) (here,
Scientific Computing WS 2017/2018 Lecture 18 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 18 Slide 1 Lecture 18 Slide 2 Weak formulation of homogeneous Dirichlet problem Search u H0 1 (Ω) (here,
1 Distributions (due January 22, 2009)
") Distributions (due January 22, 29). The distribution derivative of the locally integrable function ln( x ) is the principal value distribution /x. We know that, φ = lim φ(x) dx. x ɛ x Show that x, φ =
Distributions (due January 22, 29). The distribution derivative of the locally integrable function ln( x ) is the principal value distribution /x. We know that, φ = lim φ(x) dx. x ɛ x Show that x, φ =
Computational Methods in Plasma Physics
 Computational Methods in Plasma Physics Richard Fitzpatrick Institute for Fusion Studies University of Texas at Austin Purpose of Talk Describe use of numerical methods to solve simple problem in plasma
Computational Methods in Plasma Physics Richard Fitzpatrick Institute for Fusion Studies University of Texas at Austin Purpose of Talk Describe use of numerical methods to solve simple problem in plasma
Part I. Discrete Models. Part I: Discrete Models. Scientific Computing I. Motivation: Heat Transfer. A Wiremesh Model (2) A Wiremesh Model
 A Wiremesh Model") Part I: iscrete Models Scientific Computing I Module 5: Heat Transfer iscrete and Continuous Models Tobias Neckel Winter 04/05 Motivation: Heat Transfer Wiremesh Model A Finite Volume Model Time ependent
Part I: iscrete Models Scientific Computing I Module 5: Heat Transfer iscrete and Continuous Models Tobias Neckel Winter 04/05 Motivation: Heat Transfer Wiremesh Model A Finite Volume Model Time ependent
Goal: Approximate the area under a curve using the Rectangular Approximation Method (RAM) RECTANGULAR APPROXIMATION METHODS
 RECTANGULAR APPROXIMATION METHODS") AP Calculus 5. Areas and Distances Goal: Approximate the area under a curve using the Rectangular Approximation Method (RAM) Exercise : Calculate the area between the x-axis and the graph of y = 3 2x.
AP Calculus 5. Areas and Distances Goal: Approximate the area under a curve using the Rectangular Approximation Method (RAM) Exercise : Calculate the area between the x-axis and the graph of y = 3 2x.
Computational Neuroscience. Session 1-2
 Computational Neuroscience. Session 1-2 Dr. Marco A Roque Sol 05/29/2018 Definitions Differential Equations A differential equation is any equation which contains derivatives, either ordinary or partial
Computational Neuroscience. Session 1-2 Dr. Marco A Roque Sol 05/29/2018 Definitions Differential Equations A differential equation is any equation which contains derivatives, either ordinary or partial
Earth System Modeling Domain decomposition
 Earth System Modeling Domain decomposition Graziano Giuliani International Centre for Theorethical Physics Earth System Physics Section Advanced School on Regional Climate Modeling over South America February
Earth System Modeling Domain decomposition Graziano Giuliani International Centre for Theorethical Physics Earth System Physics Section Advanced School on Regional Climate Modeling over South America February
arxiv: v2 [physics.comp-ph] 4 Feb 2014
![arxiv: v2 [physics.comp-ph] 4 Feb 2014](/thumbs/87/95073421.jpg "arxiv: v2 [physics.comp-ph] 4 Feb 2014") Fast and accurate solution of the Poisson equation in an immersed setting arxiv:1401.8084v2 [physics.comp-ph] 4 Feb 2014 Alexandre Noll Marques a, Jean-Christophe Nave b, Rodolfo Ruben Rosales c Abstract
Fast and accurate solution of the Poisson equation in an immersed setting arxiv:1401.8084v2 [physics.comp-ph] 4 Feb 2014 Alexandre Noll Marques a, Jean-Christophe Nave b, Rodolfo Ruben Rosales c Abstract
Name. FINAL- Math 13
 Name FINAL- Math 13 The student is reminded that no ancillary aids [e.g. books, notes or guidance from other students] is allowed on this exam. Also, no calculators are allowed on this exam. 1) 25 2) 7
Name FINAL- Math 13 The student is reminded that no ancillary aids [e.g. books, notes or guidance from other students] is allowed on this exam. Also, no calculators are allowed on this exam. 1) 25 2) 7
Calculus I Review Solutions
 Calculus I Review Solutions. Compare and contrast the three Value Theorems of the course. When you would typically use each. The three value theorems are the Intermediate, Mean and Extreme value theorems.
Calculus I Review Solutions. Compare and contrast the three Value Theorems of the course. When you would typically use each. The three value theorems are the Intermediate, Mean and Extreme value theorems.
Physics 202 Laboratory 3. Root-Finding 1. Laboratory 3. Physics 202 Laboratory
 Physics 202 Laboratory 3 Root-Finding 1 Laboratory 3 Physics 202 Laboratory The fundamental question answered by this week s lab work will be: Given a function F (x), find some/all of the values {x i }
Physics 202 Laboratory 3 Root-Finding 1 Laboratory 3 Physics 202 Laboratory The fundamental question answered by this week s lab work will be: Given a function F (x), find some/all of the values {x i }
Multivariable Calculus Notes. Faraad Armwood. Fall: Chapter 1: Vectors, Dot Product, Cross Product, Planes, Cylindrical & Spherical Coordinates
 Multivariable Calculus Notes Faraad Armwood Fall: 2017 Chapter 1: Vectors, Dot Product, Cross Product, Planes, Cylindrical & Spherical Coordinates Chapter 2: Vector-Valued Functions, Tangent Vectors, Arc
Multivariable Calculus Notes Faraad Armwood Fall: 2017 Chapter 1: Vectors, Dot Product, Cross Product, Planes, Cylindrical & Spherical Coordinates Chapter 2: Vector-Valued Functions, Tangent Vectors, Arc
x + ye z2 + ze y2, y + xe z2 + ze x2, z and where T is the
 1.(8pts) Find F ds where F = x + ye z + ze y, y + xe z + ze x, z and where T is the T surface in the pictures. (The two pictures are two views of the same surface.) The boundary of T is the unit circle
1.(8pts) Find F ds where F = x + ye z + ze y, y + xe z + ze x, z and where T is the T surface in the pictures. (The two pictures are two views of the same surface.) The boundary of T is the unit circle
Stochastic Calculus. Kevin Sinclair. August 2, 2016
 Stochastic Calculus Kevin Sinclair August, 16 1 Background Suppose we have a Brownian motion W. This is a process, and the value of W at a particular time T (which we write W T ) is a normally distributed
Stochastic Calculus Kevin Sinclair August, 16 1 Background Suppose we have a Brownian motion W. This is a process, and the value of W at a particular time T (which we write W T ) is a normally distributed
Multiple Integrals and Vector Calculus (Oxford Physics) Synopsis and Problem Sets; Hilary 2015
 Synopsis and Problem Sets; Hilary 2015") Multiple Integrals and Vector Calculus (Oxford Physics) Ramin Golestanian Synopsis and Problem Sets; Hilary 215 The outline of the material, which will be covered in 14 lectures, is as follows: 1. Introduction
Multiple Integrals and Vector Calculus (Oxford Physics) Ramin Golestanian Synopsis and Problem Sets; Hilary 215 The outline of the material, which will be covered in 14 lectures, is as follows: 1. Introduction
Instructions: No books. No notes. Non-graphing calculators only. You are encouraged, although not required, to show your work.
 Exam 3 Math 850-007 Fall 04 Odenthal Name: Instructions: No books. No notes. Non-graphing calculators only. You are encouraged, although not required, to show your work.. Evaluate the iterated integral
Exam 3 Math 850-007 Fall 04 Odenthal Name: Instructions: No books. No notes. Non-graphing calculators only. You are encouraged, although not required, to show your work.. Evaluate the iterated integral
Review for the First Midterm Exam
 Review for the First Midterm Exam Thomas Morrell 5 pm, Sunday, 4 April 9 B9 Van Vleck Hall For the purpose of creating questions for this review session, I did not make an effort to make any of the numbers
Review for the First Midterm Exam Thomas Morrell 5 pm, Sunday, 4 April 9 B9 Van Vleck Hall For the purpose of creating questions for this review session, I did not make an effort to make any of the numbers
(b) Find the range of h(x, y) (5) Use the definition of continuity to explain whether or not the function f(x, y) is continuous at (0, 0)
 Find the range of h(x, y) (5) Use the definition of continuity to explain whether or not the function f(x, y) is continuous at (0, 0)") eview Exam Math 43 Name Id ead each question carefully. Avoid simple mistakes. Put a box around the final answer to a question (use the back of the page if necessary). For full credit you must show your
eview Exam Math 43 Name Id ead each question carefully. Avoid simple mistakes. Put a box around the final answer to a question (use the back of the page if necessary). For full credit you must show your
TUTORIAL 4. Proof. Computing the potential at the center and pole respectively,
 TUTORIAL 4 Problem 1 An inverted hemispherical bowl of radius R carries a uniform surface charge density σ. Find the potential difference between the north pole and the center. Proof. Computing the potential
TUTORIAL 4 Problem 1 An inverted hemispherical bowl of radius R carries a uniform surface charge density σ. Find the potential difference between the north pole and the center. Proof. Computing the potential
Theoretical Foundation of 3D Alfvén Resonances: Time Dependent Solutions
 Theoretical Foundation of 3D Alfvén Resonances: Time Dependent Solutions Tom Elsden 1 Andrew Wright 1 1 Dept Maths & Stats, University of St Andrews DAMTP Seminar - 8th May 2017 Outline Introduction Coordinates
Theoretical Foundation of 3D Alfvén Resonances: Time Dependent Solutions Tom Elsden 1 Andrew Wright 1 1 Dept Maths & Stats, University of St Andrews DAMTP Seminar - 8th May 2017 Outline Introduction Coordinates
NONLINEAR CONTINUUM FORMULATIONS CONTENTS
 NONLINEAR CONTINUUM FORMULATIONS CONTENTS Introduction to nonlinear continuum mechanics Descriptions of motion Measures of stresses and strains Updated and Total Lagrangian formulations Continuum shell
NONLINEAR CONTINUUM FORMULATIONS CONTENTS Introduction to nonlinear continuum mechanics Descriptions of motion Measures of stresses and strains Updated and Total Lagrangian formulations Continuum shell
Partial Fractions. June 27, In this section, we will learn to integrate another class of functions: the rational functions.
 Partial Fractions June 7, 04 In this section, we will learn to integrate another class of functions: the rational functions. Definition. A rational function is a fraction of two polynomials. For example,
Partial Fractions June 7, 04 In this section, we will learn to integrate another class of functions: the rational functions. Definition. A rational function is a fraction of two polynomials. For example,
Applied Math Qualifying Exam 11 October Instructions: Work 2 out of 3 problems in each of the 3 parts for a total of 6 problems.
 Printed Name: Signature: Applied Math Qualifying Exam 11 October 2014 Instructions: Work 2 out of 3 problems in each of the 3 parts for a total of 6 problems. 2 Part 1 (1) Let Ω be an open subset of R
Printed Name: Signature: Applied Math Qualifying Exam 11 October 2014 Instructions: Work 2 out of 3 problems in each of the 3 parts for a total of 6 problems. 2 Part 1 (1) Let Ω be an open subset of R
Formulas for probability theory and linear models SF2941
 Formulas for probability theory and linear models SF2941 These pages + Appendix 2 of Gut) are permitted as assistance at the exam. 11 maj 2008 Selected formulae of probability Bivariate probability Transforms
Formulas for probability theory and linear models SF2941 These pages + Appendix 2 of Gut) are permitted as assistance at the exam. 11 maj 2008 Selected formulae of probability Bivariate probability Transforms
Electrodynamics PHY712. Lecture 3 Electrostatic potentials and fields. Reference: Chap. 1 in J. D. Jackson s textbook.
 Electrodynamics PHY712 Lecture 3 Electrostatic potentials and fields Reference: Chap. 1 in J. D. Jackson s textbook. 1. Poisson and Laplace Equations 2. Green s Theorem 3. One-dimensional examples 1 Poisson
Electrodynamics PHY712 Lecture 3 Electrostatic potentials and fields Reference: Chap. 1 in J. D. Jackson s textbook. 1. Poisson and Laplace Equations 2. Green s Theorem 3. One-dimensional examples 1 Poisson
Continuum Mechanics Lecture 5 Ideal fluids
 Continuum Mechanics Lecture 5 Ideal fluids Prof. http://www.itp.uzh.ch/~teyssier Outline - Helmholtz decomposition - Divergence and curl theorem - Kelvin s circulation theorem - The vorticity equation
Continuum Mechanics Lecture 5 Ideal fluids Prof. http://www.itp.uzh.ch/~teyssier Outline - Helmholtz decomposition - Divergence and curl theorem - Kelvin s circulation theorem - The vorticity equation
Molecular Weight & Energy Transport
 Molecular Weight & Energy Transport 7 September 20 Goals Review mean molecular weight Practice working with diffusion Mean Molecular Weight. We will frequently use µ,, and (the mean molecular weight per
Molecular Weight & Energy Transport 7 September 20 Goals Review mean molecular weight Practice working with diffusion Mean Molecular Weight. We will frequently use µ,, and (the mean molecular weight per
The Liapunov Method for Determining Stability (DRAFT)
") 44 The Liapunov Method for Determining Stability (DRAFT) 44.1 The Liapunov Method, Naively Developed In the last chapter, we discussed describing trajectories of a 2 2 autonomous system x = F(x) as level
44 The Liapunov Method for Determining Stability (DRAFT) 44.1 The Liapunov Method, Naively Developed In the last chapter, we discussed describing trajectories of a 2 2 autonomous system x = F(x) as level
Lehrstuhl Informatik V. Lehrstuhl Informatik V. 1. solve weak form of PDE to reduce regularity properties. Lehrstuhl Informatik V
 Part I: Introduction to Finite Element Methods Scientific Computing I Module 8: An Introduction to Finite Element Methods Tobias Necel Winter 4/5 The Model Problem FEM Main Ingredients Wea Forms and Wea
Part I: Introduction to Finite Element Methods Scientific Computing I Module 8: An Introduction to Finite Element Methods Tobias Necel Winter 4/5 The Model Problem FEM Main Ingredients Wea Forms and Wea
Series Solution of Linear Ordinary Differential Equations
 Series Solution of Linear Ordinary Differential Equations Department of Mathematics IIT Guwahati Aim: To study methods for determining series expansions for solutions to linear ODE with variable coefficients.
Series Solution of Linear Ordinary Differential Equations Department of Mathematics IIT Guwahati Aim: To study methods for determining series expansions for solutions to linear ODE with variable coefficients.
MATH 23 Exam 2 Review Solutions
 MATH 23 Exam 2 Review Solutions Problem 1. Use the method of reduction of order to find a second solution of the given differential equation x 2 y (x 0.1875)y = 0, x > 0, y 1 (x) = x 1/4 e 2 x Solution
MATH 23 Exam 2 Review Solutions Problem 1. Use the method of reduction of order to find a second solution of the given differential equation x 2 y (x 0.1875)y = 0, x > 0, y 1 (x) = x 1/4 e 2 x Solution
An efficient and accurate MEMS accelerometer model with sense finger dynamics for applications in mixed-technology control loops
 BMAS 2007, San Jose, 20-21 September 2007 An efficient and accurate MEMS accelerometer model with sense finger dynamics for applications in mixed-technology control loops Chenxu Zhao, Leran Wang and Tom
BMAS 2007, San Jose, 20-21 September 2007 An efficient and accurate MEMS accelerometer model with sense finger dynamics for applications in mixed-technology control loops Chenxu Zhao, Leran Wang and Tom
Cartesian Tensors. e 2. e 1. General vector (formal definition to follow) denoted by components
 denoted by components") Cartesian Tensors Reference: Jeffreys Cartesian Tensors 1 Coordinates and Vectors z x 3 e 3 y x 2 e 2 e 1 x x 1 Coordinates x i, i 123,, Unit vectors: e i, i 123,, General vector (formal definition to
Cartesian Tensors Reference: Jeffreys Cartesian Tensors 1 Coordinates and Vectors z x 3 e 3 y x 2 e 2 e 1 x x 1 Coordinates x i, i 123,, Unit vectors: e i, i 123,, General vector (formal definition to
1. (a) (5 points) Find the unit tangent and unit normal vectors T and N to the curve. r (t) = 3 cos t, 0, 3 sin t, r ( 3π
 (5 points) Find the unit tangent and unit normal vectors T and N to the curve. r (t) = 3 cos t, 0, 3 sin t, r ( 3π") 1. a) 5 points) Find the unit tangent and unit normal vectors T and N to the curve at the point P 3, 3π, r t) 3 cos t, 4t, 3 sin t 3 ). b) 5 points) Find curvature of the curve at the point P. olution:
1. a) 5 points) Find the unit tangent and unit normal vectors T and N to the curve at the point P 3, 3π, r t) 3 cos t, 4t, 3 sin t 3 ). b) 5 points) Find curvature of the curve at the point P. olution:
0.2. CONSERVATION LAW FOR FLUID 9
 0.2. CONSERVATION LAW FOR FLUID 9 Consider x-component of Eq. (26), we have D(ρu) + ρu( v) dv t = ρg x dv t S pi ds, (27) where ρg x is the x-component of the bodily force, and the surface integral is
0.2. CONSERVATION LAW FOR FLUID 9 Consider x-component of Eq. (26), we have D(ρu) + ρu( v) dv t = ρg x dv t S pi ds, (27) where ρg x is the x-component of the bodily force, and the surface integral is
MTH739U/P: Topics in Scientific Computing Autumn 2016 Week 6
 MTH739U/P: Topics in Scientific Computing Autumn 16 Week 6 4.5 Generic algorithms for non-uniform variates We have seen that sampling from a uniform distribution in [, 1] is a relatively straightforward
MTH739U/P: Topics in Scientific Computing Autumn 16 Week 6 4.5 Generic algorithms for non-uniform variates We have seen that sampling from a uniform distribution in [, 1] is a relatively straightforward
Numerical Solutions to Partial Differential Equations
 Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University The Residual and Error of Finite Element Solutions Mixed BVP of Poisson Equation
Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University The Residual and Error of Finite Element Solutions Mixed BVP of Poisson Equation
Module-3: Kinematics
 Module-3: Kinematics Lecture-20: Material and Spatial Time Derivatives The velocity acceleration and velocity gradient are important quantities of kinematics. Here we discuss the description of these kinematic
Module-3: Kinematics Lecture-20: Material and Spatial Time Derivatives The velocity acceleration and velocity gradient are important quantities of kinematics. Here we discuss the description of these kinematic
Spring 2011 solutions. We solve this via integration by parts with u = x 2 du = 2xdx. This is another integration by parts with u = x du = dx and
 Math - 8 Rahman Final Eam Practice Problems () We use disks to solve this, Spring solutions V π (e ) d π e d. We solve this via integration by parts with u du d and dv e d v e /, V π e π e d. This is another
Math - 8 Rahman Final Eam Practice Problems () We use disks to solve this, Spring solutions V π (e ) d π e d. We solve this via integration by parts with u du d and dv e d v e /, V π e π e d. This is another
A Primer on Three Vectors
 Michael Dine Department of Physics University of California, Santa Cruz September 2010 What makes E&M hard, more than anything else, is the problem that the electric and magnetic fields are vectors, and
Michael Dine Department of Physics University of California, Santa Cruz September 2010 What makes E&M hard, more than anything else, is the problem that the electric and magnetic fields are vectors, and
Finite Elements. Colin Cotter. January 15, Colin Cotter FEM
 Finite Elements January 15, 2018 Why Can solve PDEs on complicated domains. Have flexibility to increase order of accuracy and match the numerics to the physics. has an elegant mathematical formulation
Finite Elements January 15, 2018 Why Can solve PDEs on complicated domains. Have flexibility to increase order of accuracy and match the numerics to the physics. has an elegant mathematical formulation
MATH 280 Multivariate Calculus Fall Integrating a vector field over a surface
 MATH 280 Multivariate Calculus Fall 2011 Definition Integrating a vector field over a surface We are given a vector field F in space and an oriented surface in the domain of F as shown in the figure below
MATH 280 Multivariate Calculus Fall 2011 Definition Integrating a vector field over a surface We are given a vector field F in space and an oriented surface in the domain of F as shown in the figure below
You may hold onto this portion of the test and work on it some more after you have completed the no calculator portion of the test.
 MTH 5 Winter Term 010 Test 1- Calculator Portion Name You may hold onto this portion of the test and work on it some more after you have completed the no calculator portion of the test. 1. Consider the
MTH 5 Winter Term 010 Test 1- Calculator Portion Name You may hold onto this portion of the test and work on it some more after you have completed the no calculator portion of the test. 1. Consider the
Worked Examples Set 2
 Worked Examples Set 2 Q.1. Application of Maxwell s eqns. [Griffiths Problem 7.42] In a perfect conductor the conductivity σ is infinite, so from Ohm s law J = σe, E = 0. Any net charge must be on the
Worked Examples Set 2 Q.1. Application of Maxwell s eqns. [Griffiths Problem 7.42] In a perfect conductor the conductivity σ is infinite, so from Ohm s law J = σe, E = 0. Any net charge must be on the
V (r,t) = i ˆ u( x, y,z,t) + ˆ j v( x, y,z,t) + k ˆ w( x, y, z,t)
 = i ˆ u( x, y,z,t) + ˆ j v( x, y,z,t) + k ˆ w( x, y, z,t)") IV. DIFFERENTIAL RELATIONS FOR A FLUID PARTICLE This chapter presents the development and application of the basic differential equations of fluid motion. Simplifications in the general equations and common
IV. DIFFERENTIAL RELATIONS FOR A FLUID PARTICLE This chapter presents the development and application of the basic differential equations of fluid motion. Simplifications in the general equations and common
Antiderivatives. Definition A function, F, is said to be an antiderivative of a function, f, on an interval, I, if. F x f x for all x I.
 Antiderivatives Definition A function, F, is said to be an antiderivative of a function, f, on an interval, I, if F x f x for all x I. Theorem If F is an antiderivative of f on I, then every function of
Antiderivatives Definition A function, F, is said to be an antiderivative of a function, f, on an interval, I, if F x f x for all x I. Theorem If F is an antiderivative of f on I, then every function of
Electromagnetism Physics 15b
 Electromagnetism Physics 15b Lecture #5 Curl Conductors Purcell 2.13 3.3 What We Did Last Time Defined divergence: Defined the Laplacian: From Gauss s Law: Laplace s equation: F da divf = lim S V 0 V Guass
Electromagnetism Physics 15b Lecture #5 Curl Conductors Purcell 2.13 3.3 What We Did Last Time Defined divergence: Defined the Laplacian: From Gauss s Law: Laplace s equation: F da divf = lim S V 0 V Guass
MECH 5312 Solid Mechanics II. Dr. Calvin M. Stewart Department of Mechanical Engineering The University of Texas at El Paso
 MECH 5312 Solid Mechanics II Dr. Calvin M. Stewart Department of Mechanical Engineering The University of Texas at El Paso Table of Contents Preliminary Math Concept of Stress Stress Components Equilibrium
MECH 5312 Solid Mechanics II Dr. Calvin M. Stewart Department of Mechanical Engineering The University of Texas at El Paso Table of Contents Preliminary Math Concept of Stress Stress Components Equilibrium
Continuous Functions on Metric Spaces
 Continuous Functions on Metric Spaces Math 201A, Fall 2016 1 Continuous functions Definition 1. Let (X, d X ) and (Y, d Y ) be metric spaces. A function f : X Y is continuous at a X if for every ɛ > 0
Continuous Functions on Metric Spaces Math 201A, Fall 2016 1 Continuous functions Definition 1. Let (X, d X ) and (Y, d Y ) be metric spaces. A function f : X Y is continuous at a X if for every ɛ > 0
Math review. Math review
 Math review 1 Math review 3 1 series approximations 3 Taylor s Theorem 3 Binomial approximation 3 sin(x), for x in radians and x close to zero 4 cos(x), for x in radians and x close to zero 5 2 some geometry
Math review 1 Math review 3 1 series approximations 3 Taylor s Theorem 3 Binomial approximation 3 sin(x), for x in radians and x close to zero 4 cos(x), for x in radians and x close to zero 5 2 some geometry
Tensor Analysis in Euclidean Space
 Tensor Analysis in Euclidean Space James Emery Edited: 8/5/2016 Contents 1 Classical Tensor Notation 2 2 Multilinear Functionals 4 3 Operations With Tensors 5 4 The Directional Derivative 5 5 Curvilinear
Tensor Analysis in Euclidean Space James Emery Edited: 8/5/2016 Contents 1 Classical Tensor Notation 2 2 Multilinear Functionals 4 3 Operations With Tensors 5 4 The Directional Derivative 5 5 Curvilinear
Principles of Optimal Control Spring 2008
 MIT OpenCourseWare http://ocw.mit.edu 16.323 Principles of Optimal Control Spring 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 16.323 Lecture
MIT OpenCourseWare http://ocw.mit.edu 16.323 Principles of Optimal Control Spring 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 16.323 Lecture
FORMULA SHEET FOR QUIZ 2 Exam Date: November 8, 2017
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Physics Department Physics 8.07: Electromagnetism II November 5, 207 Prof. Alan Guth FORMULA SHEET FOR QUIZ 2 Exam Date: November 8, 207 A few items below are marked
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Physics Department Physics 8.07: Electromagnetism II November 5, 207 Prof. Alan Guth FORMULA SHEET FOR QUIZ 2 Exam Date: November 8, 207 A few items below are marked
Vectors. Three dimensions. (a) Cartesian coordinates ds is the distance from x to x + dx. ds 2 = dx 2 + dy 2 + dz 2 = g ij dx i dx j (1)
 Cartesian coordinates ds is the distance from x to x + dx. ds 2 = dx 2 + dy 2 + dz 2 = g ij dx i dx j (1)") Vectors (Dated: September017 I. TENSORS Three dimensions (a Cartesian coordinates ds is the distance from x to x + dx ds dx + dy + dz g ij dx i dx j (1 Here dx 1 dx, dx dy, dx 3 dz, and tensor g ij is
Vectors (Dated: September017 I. TENSORS Three dimensions (a Cartesian coordinates ds is the distance from x to x + dx ds dx + dy + dz g ij dx i dx j (1 Here dx 1 dx, dx dy, dx 3 dz, and tensor g ij is
UNIVERSITY of LIMERICK OLLSCOIL LUIMNIGH
 UNIVERSITY of LIMERICK OLLSCOIL LUIMNIGH Faculty of Science and Engineering Department of Mathematics and Statistics END OF SEMESTER ASSESSMENT PAPER MODULE CODE: MA4006 SEMESTER: Spring 2011 MODULE TITLE:
UNIVERSITY of LIMERICK OLLSCOIL LUIMNIGH Faculty of Science and Engineering Department of Mathematics and Statistics END OF SEMESTER ASSESSMENT PAPER MODULE CODE: MA4006 SEMESTER: Spring 2011 MODULE TITLE:
conditional cdf, conditional pdf, total probability theorem?
 6 Multiple Random Variables 6.0 INTRODUCTION scalar vs. random variable cdf, pdf transformation of a random variable conditional cdf, conditional pdf, total probability theorem expectation of a random
6 Multiple Random Variables 6.0 INTRODUCTION scalar vs. random variable cdf, pdf transformation of a random variable conditional cdf, conditional pdf, total probability theorem expectation of a random
Sec. 1.1: Basics of Vectors
 Sec. 1.1: Basics of Vectors Notation for Euclidean space R n : all points (x 1, x 2,..., x n ) in n-dimensional space. Examples: 1. R 1 : all points on the real number line. 2. R 2 : all points (x 1, x
Sec. 1.1: Basics of Vectors Notation for Euclidean space R n : all points (x 1, x 2,..., x n ) in n-dimensional space. Examples: 1. R 1 : all points on the real number line. 2. R 2 : all points (x 1, x
MATH1013 Calculus I. Introduction to Functions 1
 MATH1013 Calculus I Introduction to Functions 1 Edmund Y. M. Chiang Department of Mathematics Hong Kong University of Science & Technology May 9, 2013 Integration I (Chapter 4) 2013 1 Based on Briggs,
MATH1013 Calculus I Introduction to Functions 1 Edmund Y. M. Chiang Department of Mathematics Hong Kong University of Science & Technology May 9, 2013 Integration I (Chapter 4) 2013 1 Based on Briggs,
Diffusion equation in one spatial variable Cauchy problem. u(x, 0) = φ(x)
 = φ(x)") Diffusion equation in one spatial variable Cauchy problem. u t (x, t) k u xx (x, t) = f(x, t), x R, t > u(x, ) = φ(x) 1 Some more mathematics { if x < Θ(x) = 1 if x > is the Heaviside step function. It
Diffusion equation in one spatial variable Cauchy problem. u t (x, t) k u xx (x, t) = f(x, t), x R, t > u(x, ) = φ(x) 1 Some more mathematics { if x < Θ(x) = 1 if x > is the Heaviside step function. It
Multiple Integrals. Chapter 4. Section 7. Department of Mathematics, Kookmin Univerisity. Numerical Methods.
 4.7.1 Multiple Integrals Chapter 4 Section 7 4.7.2 Double Integral R f ( x, y) da 4.7.3 Double Integral Apply Simpson s rule twice R [ a, b] [ c, d] a x, x,..., x b, c y, y,..., y d 0 1 n 0 1 h ( b a)
4.7.1 Multiple Integrals Chapter 4 Section 7 4.7.2 Double Integral R f ( x, y) da 4.7.3 Double Integral Apply Simpson s rule twice R [ a, b] [ c, d] a x, x,..., x b, c y, y,..., y d 0 1 n 0 1 h ( b a)
Numerical Solutions to Partial Differential Equations
 Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University Discretization of Boundary Conditions Discretization of Boundary Conditions On
Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University Discretization of Boundary Conditions Discretization of Boundary Conditions On
Continuous Random Variables
 1 / 24 Continuous Random Variables Saravanan Vijayakumaran sarva@ee.iitb.ac.in Department of Electrical Engineering Indian Institute of Technology Bombay February 27, 2013 2 / 24 Continuous Random Variables
1 / 24 Continuous Random Variables Saravanan Vijayakumaran sarva@ee.iitb.ac.in Department of Electrical Engineering Indian Institute of Technology Bombay February 27, 2013 2 / 24 Continuous Random Variables
Lecture 12: Detailed balance and Eigenfunction methods
 Lecture 12: Detailed balance and Eigenfunction methods Readings Recommended: Pavliotis [2014] 4.5-4.7 (eigenfunction methods and reversibility), 4.2-4.4 (explicit examples of eigenfunction methods) Gardiner
Lecture 12: Detailed balance and Eigenfunction methods Readings Recommended: Pavliotis [2014] 4.5-4.7 (eigenfunction methods and reversibility), 4.2-4.4 (explicit examples of eigenfunction methods) Gardiner
MAT 211 Final Exam. Spring Jennings. Show your work!
 MAT 211 Final Exam. pring 215. Jennings. how your work! Hessian D = f xx f yy (f xy ) 2 (for optimization). Polar coordinates x = r cos(θ), y = r sin(θ), da = r dr dθ. ylindrical coordinates x = r cos(θ),
MAT 211 Final Exam. pring 215. Jennings. how your work! Hessian D = f xx f yy (f xy ) 2 (for optimization). Polar coordinates x = r cos(θ), y = r sin(θ), da = r dr dθ. ylindrical coordinates x = r cos(θ),