Backprojection of Some Image Symmetries Based on a Local Orientation Description
|
|
|
- Egbert Hodge
- 5 years ago
- Views:
Transcription
1 Backprojection of Some Image Symmetries Based on a Local Orientation Description Björn Johansson Computer Vision Laboratory Department of Electrical Engineering Linköping University, SE Linköping, Sweden bjorn@isy.liu.se LiTH-ISY-R ISSN
2 Backprojection of Some Image Symmetries Based on a Local Orientation Description Björn Johansson Computer Vision Laboratory Department of Electrical Engineering Linköping University, SE Linköping, Sweden bjorn@isy.liu.se October 30, 2000 Abstract Some image patterns, e.g. circles, hyperbolic curves, star patterns etc., can be described in a compact way using local orientation. The features mentioned above is part of a family of patterns called rotational symmetries. This theory can be used to detect image patterns from the local orientation in double angle representation of an images. Some of the rotational symmetries are described originally from the local orientation without being designed to detect a certain feature. The question is then: given a description in double angle representation, what kind of image features does this description correspond to? This inverse, or backprojection, is not unambiguous - many patterns has the same local orientation description. This report answers this question for the case of rotational symmetries and also for some other descriptions. 1
3 Contents 1 Introduction 3 2 Local orientation in double angle representation, z 3 3 Some symmetries on local orientation z General assumption Rotational symmetries, z = e i2β(ϕ) Theory Experiments Polar symmetries, z = e i(n1 ln r+n2ϕ+α) Theory Experiments Cartesian symmetries, z = e i(a1x+a2y+α) Theory Experiments Acknowledgment 13 2
4 1 Introduction Human vision seems to work in a hierarchical way in that we first extract low level features such as local orientation and color and then higher level features. No one knows for sure what these high level features are but there are some indications that curvature, circles, spiral- and star patters are among them [7], [13]. Perceptual experiments also indicate that corners and curvature are very important features in the process of recognition and one can often recognize an object from its curvature alone [1], [3]. One way to detect the features mentioned above is to use the theory of rotational symmetries. They have been described in the literature a number of times, see e.g. [6], [2], [5], [11], [12], [4], [9], [10]. Hyperbolic-, circular-, star-, and other patterns can be described in a compact way using local orientation in double angle representation. They can therefore be detected using simple correlations on the local orientation image. These descriptions can be generalized to include a larger class of image patterns called rotational symmetries. This larger class is described on the local orientation and therefore we do not know directly what image patterns they describe. The most useful rotational symmetries has been proven to describe the patterns mentioned above, but there are still unexplored symmetries. The question is basically: given a description on local orientation, what class of image patterns does this correspond to? This report answers this question for the case of rotational symmetries and also for some other descriptions. The double angle representation is non-linear and the answer is therefore not trivial. This report contains a lot of tedious mathematical calculations, but the idea is fairly easy: Start with a local orientation description in double angle representation. In each point, decode this representation into an orientation angle and assume that the image gradient has the same angle. When we know the image gradient we can solve a differential equation to get the underlying image pattern (the solution is not unique). 2 Local orientation in double angle representation, z There exists a number of ways to detect local orientation in images. We will not deal with these methods in this report but rather concentrate on orientation representations. The classical representation of local orientation is simply a 2D-vector pointing in the dominant direction with a magnitude that reflects the orientation dominance (e.g. the energy in the dominant direction). An example of this is the image gradient. A better representation is the double angle representation, where we have a vector, or a complex number z, pointing in the double angle direction. This means that if the orientation has the direction θ we represent it with a vector pointing in the 2θ-direction, i.e. z = e i2θ. Figure 1 illustrates the idea. This representation has at least two advantages: We avoid ambiguities in the representation: It does not matter if we choose to say that the orientation has the direction θ or, equivalently, θ + π. In the double 3
5 Im z Re z Figure 1: Double angle representation of local orientation. angle representation both choices get the same descriptor e i2θ. Averaging the double angle orientation description field makes sense. One can argue that two orthogonal orientations should have maximally different representations, e.g. vectors that point in opposite directions. This is for instance useful in color images and vector fields when we want to fuse descriptors from several channels into one description. This descriptor will in this paper be denoted by a complex number z. The argument arg z points out the dominant orientation and the magnitude z usually represent the certainty or energy of the orientation. 3 Some symmetries on local orientation z Lets repeat the question we are trying to answer: given a description on local orientation, what class of image patterns does this correspond to? This section start with the orientation image z and go backwards to the original image, f, from which the orientation image was calculated, i.e. Double angle representation z Grayscale image f This inverse is of course not unambiguous, but we get a hint by making the assumption that the image gradient is parallel to the dominant orientation. There are two assumptions made in this report. The first one, mentioned above, is not very restrictive and says that the image gradient is parallel to the local orientation. The second one assumes that the image pattern can be described as a separable function in some suitably chosen coordinate system which depend on the selected symmetry. 4
6 3.1 General assumption The assumption that the image gradient f is parallel to the local orientation β = β(x, y) can be written mathematically as ( ) ( ) fx cos β f = //, where β = 1 arg z (1) f y sin β 2 i.e. ( ) ( fx cos β = ± f f x 2 + fy 2 y sin β ) (2) We have to divide the phase (arg z) by two to get rid of the double angle representation. The price is the direction unambiguity (±). Equation 2 squared gives fx 2 = ( ) fx 2 + fy 2 cos 2 β fy 2 = ( ) fx 2 + fy 2 sin 2 β f x sin β = ±f y cos β (3) From equation 2 we see that the - -solution is false and we arrive at the final equation: Backprojection equation: f x sin β = f y cos β (4) Every pattern description based on the local orientation is described by a function β(x, y). This function can be put into equation 4 which can be solved to get the corresponding gray-image pattern f(x, y). The remaining subsections solve the backprojection equation for some special cases of β(x, y). The first subsection deals with the rotational symmetry class. The other two subsections deals with polar and Cartesian symmetries, which may not be as useful as the rotational symmetries, but are included more as curiosity and art. 3.2 Rotational symmetries, z = e i2β(ϕ) Theory The name rotational symmetries is not entirely logical but it is an established name and should not be changed. They are actually a special case of polar symmetries described in section 3.3. They can be described using the local orientation description as z = e i2β(ϕ) (5) The orientation β only depends on ϕ and is constant along the r-dimension. The most useful ones are the zeroth, first, and second order rotational symmetries: z = e i(nϕ+α), n =0, 1, 2 (6) 5
7 They are proven to describe patterns like corners, curvature, circles, and stars (see e.g. [8]). The other rotational symmetries has not been thoroughly examined before. We shall now solve the backprojection equation 4 assuming β = β(ϕ). In this case it is easier to switch to polar coordinates: x = r cos ϕ (7) y = r sin ϕ The derivatives f x and f y can be written in polar coordinates using the chain-rule: fx = f x = f r r f y = f y = f r x + f ϕ ϕ r y + f ϕ sin ϕ x = f r cos ϕ f ϕ r ϕ cos ϕ y = f r sin ϕ + f ϕ r (8) If this is inserted in equation 4 we get ( sin ϕ f r cos ϕ f ϕ r ) ( sin β = f r sin ϕ + f ϕ cos ϕ r After some re-shuffling we get the polar version of equation 4: ) cos β (9) Polar backprojection equation: f r r sin(β ϕ) =f ϕ cos(β ϕ) (10) This equation is still quite difficult to solve, but if we make the assumption that f is polar separable, i.e. f(r, ϕ) =R(r)Φ(ϕ), we get R (r)φ(ϕ)r sin(β ϕ) =R(r)Φ (ϕ)cos(β ϕ) R (r) R(r) r = Φ (ϕ) coth(β ϕ) (11) Φ(ϕ) Since β only depends on ϕ we know that the left side only depends on r and the right side only depends on ϕ. Therefore both sides have to be constant: Andweget R (r) R(r) r = K Φ (ϕ) Φ(ϕ) coth(β ϕ) =K Rotational symmetries: R(r) =C 1 r K Φ(ϕ) =C 2 e K tan(β ϕ)dϕ (12) f(r, ϕ) =C(re tan(β(ϕ) ϕ)dϕ ) K (13) 6
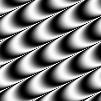
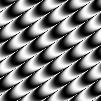
8 Provided a function β(ϕ), this function can be solved numerically to get the final solution. There are some cases where we can solve equation 13 analytically. Suppose z is the n:th order rotational symmetry e i(nϕ+α), i.e β(ϕ) = 1 2 nϕ + 1 2α. Then we get Φ(ϕ) = C 2 e K tan(( n 2 1)ϕ+ α 2 )dϕ = / / = = C 2 e K n 1 1 ln cos(( n 2 1)ϕ+ α 2 ) 2 = (14) = C 2 cos(( n 2 1)ϕ + α K 2 ) n 1 2 / / There is one exception to the solution above: If n =2we get Φ(ϕ) = C 2 e K tan( α 2 )dϕ = = C 2 e K tan( α 2 )ϕ (15) If we choose choose K =1 n 2 and skip the. in the case n 2and K =1in the case n =2we get the final solution: n:th order rotational symmetry: f(r, ϕ) =Cr (1 n 2 ) cos(( n 2 1)ϕ + α 2 ) n 2 (16) f(r, ϕ) =Cre tan( α 2 )ϕ n =2 What does the patterns in equation 16 look like? One way to visualize them is to plot trajectories or isobars (inspired by [5]). To get the trajectories we can for instance plot 1+cos(ωf(r, ϕ)) g(r, ϕ) = (17) 2 in the case n 2. ω determines the frequency of the repetitive pattern. For the case n =2is turns out that g(r, ϕ) = 1 2 (1 + cos(ω cos( α 2 )lnf(r, ϕ))) = (18) = 1 2 (1 + cos(ω(cos( α 2 )lnr +sin(α 2 )ϕ))) is a better, well behaved, choice. It is easy to show that if f(r, ϕ) is a solution to the backprojection equation 4 then every function g(r, ϕ) =h(f(r, ϕ)) is also a solution. We can thus generate a bigger class of functions than polar separable functions that solves the symmetry equation. Figure 2 shows some examples of functions from equation 16. Another choice of g could be a log-norm function: g(r, ϕ) =e ω ln2 (100 f(r,ϕ)/ω) (19) This will give a non-repetitive pattern (a trajectory of f). Different ω gives different patterns, e.g different ω when plotting the first order symmetry (n = 1) will give various degree of curvature, see figure 3. 7

















































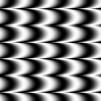
9 3.2.2 Experiments Figure 2 and 3 contains some examples of the functions described in equation 16. n = 4 n = 3 n = 2 n = 1 n = 0 n = 1 n = 2 n = 3 n = 4 n = 5 α = 3π/2 α = π α = π/2 α = 0 Figure 2: Some examples of rotational symmetries z = e i(nϕ+α). The backprojection is found in equation 16 and they are plotted using trajectory functions 17 and 18. ω =5 ω =10 ω =20 ω =40 ω =80 Figure 3: Some examples from equation 16 using function 19. There are a lot of other patterns that can be described as a rotational symmetry. The figure shows some examples. In these cases we have to use equation 13 and approximate the integral. z = e 2iϕ + e 2iϕ z = e 1iϕ + e 2iϕ z = e 4iϕ +1.5e 2iϕ z = 1+e 2iϕ +0.5e 4iϕ z = e iϕ + e iϕ Figure 4: Some examples from equation 13 using trajectory function 17. 8
10 3.3 Polar symmetries, z = e i(n 1 ln r+n 2 ϕ+α) Just out of curiosity it could be interesting to see what happens if we also let the symmetry description depend on the radius. Therefore we try to examine the description z = e i(n1 ln r+n2ϕ+α) (20) (We select ln r instead of just r because that gives easier equations below.) Theory As before we start from the polar backprojection equation 10: In this case we have f r r sin(β ϕ) =f ϕ cos(β ϕ) β = m 1 ln r + m 2 ϕ + v where m 1 = n 1 2,m 2 = n 2 2,v= α (21) 2 Instead of switching to polar coordinates as we did in the previous case we make the following substitution: s = m 1 ln r +(m 2 1)ϕ (22) t = (1 m 2 )lnr + m 1 ϕ This gives m f r = f 1 s r + f t 1 m2 r (23) f ϕ = f s (m 2 1) + f t m 1 If this is inserted in the polar backprojection equation we get (m 1 f s +(1 m 2 )f t )sin(s + v) =((m 2 1)f s + m 1 f t )cos(s + v) f s (m 1 sin(s + v)+(1 m 2 )cos(s + v)) = f t (m 1 cos(s + v) (1 m 2 )sin(s + v)) f s cos(s + v arctan m1 1 m 2 )= f t sin(s + v arctan m1 1 m 2 ) This finally gives where ϑ = s + v arctan m1 1 m 2 f s cos ϑ = f t sin ϑ (24) Now assume the function f is separable in the s, t variables, that is f(s, t) =S(s)T (t) (25) 9





 T")



 = C")

 = C")
 f(r,")
 e")

ϕ+v")



























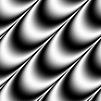
11 If this is inserted in equation 24 we get S T cos ϑ = ST sin ϑ S cos ϑ S sin ϑ = T = const = K (26) T The solution becomes: Which give the final formula: S(s) = C 1 e K ln cos ϑ = C 1 cos ϑ K T (t) = C 2 e Kt (27) f(r, ϕ) =Cr K(1 m2) e Km1ϕ cos(m 1 lnr+(1 m 2 )ϕ+v arctan Experiments Some functions from equation 28 is plotted in figure 5. m1 1 m 2 ) K (28) n1 = 3 n2 = 3 n2 = 2 n2 = 1 n2 = 0 n2 = 1 n2 = 2 n2 = 3 n1 = 3 n1 = 2 n1 = 1 n1 = 0 n1 = 1 n1 = 2 Figure 5: Some examples of polar symmetries z = e i(n1 ln r+n2ϕ). The backprojection is found in equation 28 and they are plotted using trajectory functions g =(1+cos(ω log f))/2. 10
12 3.4 Cartesian symmetries, z = e i(a 1x+a 2 y+α) Theory Start from the backprojection equation 4: f x sin β = f y cos β Make the substitution u = e γ cos β v = e γ sin β which gives where γ is defined by γ x = β y γ y = β x (29) f x = f x = f u u x + f v v x = = f u e γ (γ x cos β β x sin β)+f v e γ (γ x sin β + β x cos β) = = f u ( β y u β x v)+f v ( β y v + β x u) f y = f y = f u u y + f v v y = = f u e γ (γ y cos β β y sin β)+f v e γ (γ y sin β + β y cos β) = = f u (β x u β y v)+f v (β x v + β y u) (30) If this is inserted in the backprojection equation we get ( fu (β x u β y v)+f v (β x v + β y u) ) u = ( f u ( β y u β x v)f v ( β y v + β x u) ) v f u (β x u 2 β y uv + β y uv + β x v 2 )=f v ( β y v 2 + β x uv β x uv β y u 2 ) This finally gives In this case we have Equation 31 then becomes f u β x = f v β y (31) β = 1 2 (a 1x + a 2 y + α) γ = 1 2 ( a 2x + a 1 y) (32) a 1 f u = a 2 f v (a 1 u + a 2 )f =0 (33) v If we make the substitution u = a 1 U + a 2 V (34) v = a 2 U a 1 V 11




























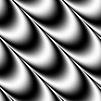















13 we have U = a 1 u + a 2 v and the differential equation becomes f =0 (35) U which has the solution f(u, V ) = h 1 (V )=h 1 ( a2u a1v )=h a 2 2 (a 2 u a 1 v)= 1 +a2 2 = h 2 (a 2 e γ cos β a 1 e γ sin β) = = h 2 (e γ a a2 a1 2 cos(β + arctan a 2 )) And the final formula becomes (36) f(x, y) =e 1 2 ( a2x+a1y) cos( a1 2 x + a2 2 y + α a1 2 + arctan a 2 ) (37) Experiments Some functions from equation 37 is plotted in figure 6. a1 = 3 a2 = 3 a2 = 2 a2 = 1 a2 = 0 a2 = 1 a2 = 2 a2 = 3 a1 = 3 a1 = 2 a1 = 1 a1 = 0 a1 = 1 a1 = 2 Figure 6: Some examples of polar symmetries z = e i(a1x+a2y). The backprojection is found in equation 37 and they are plotted using trajectory functions g = (1 + cos(ω log f))/2. 12
14 4 Acknowledgment This work was supported by the Swedish Foundation for Strategic Research, project VISIT - VIsual Information Technology. References [1] F. Attneave. Some informational aspects of visual perception. Psychological Review, 61, [2] H. Bårman and G. H. Granlund. Corner detection using local symmetry. In Proceedings from SSAB Symposium on Picture Processing, Lund University, Sweden, March SSAB. Report LiTH ISY I 0935, Computer Vision Laboratory, Linköping University, Sweden, [3] Irving Biederman. Recognition-by-components: A theory of human image understanding. Psychological Review, 94(2): , [4] J. Bigün. Optimal orientation detection of circular symmetry. Report LiTH ISY I 0871, Computer Vision Laboratory, Linköping University, Sweden, [5] J. Bigün. Local Symmetry Features in Image Processing. PhD thesis, Linköping University, Sweden, Dissertation No 179, ISBN [6] Josef Bigün. Pattern recognition in images by symmetries and coordinate transformations. Computer Vision and Image Understanding, 68(3): , [7] Jack L. Gallant, Jochen Braun, and David C. Van Essen. Selectivity for polar, hyperbolic, and cartesian gratings in macaque visual cortex. Science, 259: , January [8] G. H. Granlund and H. Knutsson. Signal Processing for Computer Vision. Kluwer Academic Publishers, ISBN [9] Björn Johansson and Gösta Granlund. Fast Selective Detection of Rotational Symmetries using Normalized Inhibition. In Proceedings of the 6th European Conference on Computer Vision, volume I, pages , Dublin, Ireland, June [10] Björn Johansson, Hans Knutsson, and Gösta Granlund. Detecting Rotational Symmetries using Normalized Convolution. In Proceedings of the 15th International Conference on Pattern Recognition, volume 3, pages , Barcelona, Spain, September IAPR. [11] H. Knutsson and G. H. Granlund. Apparatus for determining the degree of variation of a feature in a region of an image that is divided into discrete picture elements. US-Patent , 1988, (Swedish patent 1986). 13
15 [12] H. Knutsson, M. Hedlund, and G. H. Granlund. Apparatus for determining the degree of consistency of a feature in a region of an image that is divided into discrete picture elements. US-Patent , 1988), (Swedish patent 1986). [13] Gerald Oster. Phosphenes. Scientific American, 222(2):82 87,
The GET Operator. LiTH-ISY-R-2633
 The GET Operator Michael Felsberg Linköping University, Computer Vision Laboratory, SE-58183 Linköping, Sweden, mfe@isy.liu.se, http://www.isy.liu.se/cvl/ October 4, 004 LiTH-ISY-R-633 Abstract In this
The GET Operator Michael Felsberg Linköping University, Computer Vision Laboratory, SE-58183 Linköping, Sweden, mfe@isy.liu.se, http://www.isy.liu.se/cvl/ October 4, 004 LiTH-ISY-R-633 Abstract In this
On the Equivariance of the Orientation and the Tensor Field Representation Klas Nordberg Hans Knutsson Gosta Granlund Computer Vision Laboratory, Depa
 On the Invariance of the Orientation and the Tensor Field Representation Klas Nordberg Hans Knutsson Gosta Granlund LiTH-ISY-R-530 993-09-08 On the Equivariance of the Orientation and the Tensor Field
On the Invariance of the Orientation and the Tensor Field Representation Klas Nordberg Hans Knutsson Gosta Granlund LiTH-ISY-R-530 993-09-08 On the Equivariance of the Orientation and the Tensor Field
The structure tensor in projective spaces
 The structure tensor in projective spaces Klas Nordberg Computer Vision Laboratory Department of Electrical Engineering Linköping University Sweden Abstract The structure tensor has been used mainly for
The structure tensor in projective spaces Klas Nordberg Computer Vision Laboratory Department of Electrical Engineering Linköping University Sweden Abstract The structure tensor has been used mainly for
Channel Representation of Colour Images
 Channel Representation of Colour Images Report LiTH-ISY-R-2418 Per-Erik Forssén, Gösta Granlund and Johan Wiklund Computer Vision Laboratory, Department of Electrical Engineering Linköping University,
Channel Representation of Colour Images Report LiTH-ISY-R-2418 Per-Erik Forssén, Gösta Granlund and Johan Wiklund Computer Vision Laboratory, Department of Electrical Engineering Linköping University,
 Orientation Estimation in Ambiguous Neighbourhoods Mats T. Andersson & Hans Knutsson Computer Vision Laboratory Linköping University 581 83 Linköping, Sweden Abstract This paper describes a new algorithm
Orientation Estimation in Ambiguous Neighbourhoods Mats T. Andersson & Hans Knutsson Computer Vision Laboratory Linköping University 581 83 Linköping, Sweden Abstract This paper describes a new algorithm
CENTRAL SYMMETRY MODELLING
 1986-04-18 CENTRAL SYMMETRY MODELLING Josef BigUn Gosta Granlund INTERNRAPPORT L ith-isy-i-0789 Department of Electrical Engineering Linkoping University S-581 83 Linkoping, Sweden Linkopings tekniska
1986-04-18 CENTRAL SYMMETRY MODELLING Josef BigUn Gosta Granlund INTERNRAPPORT L ith-isy-i-0789 Department of Electrical Engineering Linkoping University S-581 83 Linkoping, Sweden Linkopings tekniska
On Sparse Associative Networks: A Least Squares Formulation
 On Sparse Associative Networks: A Least Squares Formulation Björn Johansson August 7, 200 Technical report LiTH-ISY-R-2368 ISSN 400-3902 Computer Vision Laboratory Department of Electrical Engineering
On Sparse Associative Networks: A Least Squares Formulation Björn Johansson August 7, 200 Technical report LiTH-ISY-R-2368 ISSN 400-3902 Computer Vision Laboratory Department of Electrical Engineering
Designing Information Devices and Systems I Fall 2018 Lecture Notes Note 21
 EECS 16A Designing Information Devices and Systems I Fall 2018 Lecture Notes Note 21 21.1 Module Goals In this module, we introduce a family of ideas that are connected to optimization and machine learning,
EECS 16A Designing Information Devices and Systems I Fall 2018 Lecture Notes Note 21 21.1 Module Goals In this module, we introduce a family of ideas that are connected to optimization and machine learning,
Definition 1.1 Let a and b be numbers, a smaller than b. Then the set of all numbers between a and b :
 1 Week 1 Definition 1.1 Let a and b be numbers, a smaller than b. Then the set of all numbers between a and b : a and b included is denoted [a, b] a included, b excluded is denoted [a, b) a excluded, b
1 Week 1 Definition 1.1 Let a and b be numbers, a smaller than b. Then the set of all numbers between a and b : a and b included is denoted [a, b] a included, b excluded is denoted [a, b) a excluded, b
Exact Solutions of the Einstein Equations
 Notes from phz 6607, Special and General Relativity University of Florida, Fall 2004, Detweiler Exact Solutions of the Einstein Equations These notes are not a substitute in any manner for class lectures.
Notes from phz 6607, Special and General Relativity University of Florida, Fall 2004, Detweiler Exact Solutions of the Einstein Equations These notes are not a substitute in any manner for class lectures.
Math 361: Homework 1 Solutions
 January 3, 4 Math 36: Homework Solutions. We say that two norms and on a vector space V are equivalent or comparable if the topology they define on V are the same, i.e., for any sequence of vectors {x
January 3, 4 Math 36: Homework Solutions. We say that two norms and on a vector space V are equivalent or comparable if the topology they define on V are the same, i.e., for any sequence of vectors {x
Taylor and Laurent Series
 Chapter 4 Taylor and Laurent Series 4.. Taylor Series 4... Taylor Series for Holomorphic Functions. In Real Analysis, the Taylor series of a given function f : R R is given by: f (x + f (x (x x + f (x
Chapter 4 Taylor and Laurent Series 4.. Taylor Series 4... Taylor Series for Holomorphic Functions. In Real Analysis, the Taylor series of a given function f : R R is given by: f (x + f (x (x x + f (x
Math 163: Lecture notes
 Math 63: Lecture notes Professor Monika Nitsche March 2, 2 Special functions that are inverses of known functions. Inverse functions (Day ) Go over: early exam, hw, quizzes, grading scheme, attendance
Math 63: Lecture notes Professor Monika Nitsche March 2, 2 Special functions that are inverses of known functions. Inverse functions (Day ) Go over: early exam, hw, quizzes, grading scheme, attendance
13.3 Arc Length and Curvature
 13 Vector Functions 13.3 Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. We have defined the length of a plane curve with parametric equations x = f(t),
13 Vector Functions 13.3 Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. We have defined the length of a plane curve with parametric equations x = f(t),
the Cartesian coordinate system (which we normally use), in which we characterize points by two coordinates (x, y) and
, in which we characterize points by two coordinates (x, y) and") 2.5.2 Standard coordinate systems in R 2 and R Similarly as for functions of one variable, integrals of functions of two or three variables may become simpler when changing coordinates in an appropriate
2.5.2 Standard coordinate systems in R 2 and R Similarly as for functions of one variable, integrals of functions of two or three variables may become simpler when changing coordinates in an appropriate
Department of Mathematics
 INDIAN INSTITUTE OF TECHNOLOGY, BOMBAY Department of Mathematics MA 04 - Complex Analysis & PDE s Solutions to Tutorial No.13 Q. 1 (T) Assuming that term-wise differentiation is permissible, show that
INDIAN INSTITUTE OF TECHNOLOGY, BOMBAY Department of Mathematics MA 04 - Complex Analysis & PDE s Solutions to Tutorial No.13 Q. 1 (T) Assuming that term-wise differentiation is permissible, show that
Example 2.1. Draw the points with polar coordinates: (i) (3, π) (ii) (2, π/4) (iii) (6, 2π/4) We illustrate all on the following graph:
 (3, π) (ii) (2, π/4) (iii) (6, 2π/4) We illustrate all on the following graph:") Section 10.3: Polar Coordinates The polar coordinate system is another way to coordinatize the Cartesian plane. It is particularly useful when examining regions which are circular. 1. Cartesian Coordinates
Section 10.3: Polar Coordinates The polar coordinate system is another way to coordinatize the Cartesian plane. It is particularly useful when examining regions which are circular. 1. Cartesian Coordinates
Complex Numbers. The set of complex numbers can be defined as the set of pairs of real numbers, {(x, y)}, with two operations: (i) addition,
}, with two operations: (i) addition,") Complex Numbers Complex Algebra The set of complex numbers can be defined as the set of pairs of real numbers, {(x, y)}, with two operations: (i) addition, and (ii) complex multiplication, (x 1, y 1 )
Complex Numbers Complex Algebra The set of complex numbers can be defined as the set of pairs of real numbers, {(x, y)}, with two operations: (i) addition, and (ii) complex multiplication, (x 1, y 1 )
Confidence and curvature estimation of curvilinear structures in 3-D
 Confidence and curvature estimation of curvilinear structures in 3-D P. Bakker, L.J. van Vliet, P.W. Verbeek Pattern Recognition Group, Department of Applied Physics, Delft University of Technology, Lorentzweg
Confidence and curvature estimation of curvilinear structures in 3-D P. Bakker, L.J. van Vliet, P.W. Verbeek Pattern Recognition Group, Department of Applied Physics, Delft University of Technology, Lorentzweg
MATH H53 : Final exam
 MATH H53 : Final exam 11 May, 18 Name: You have 18 minutes to answer the questions. Use of calculators or any electronic items is not permitted. Answer the questions in the space provided. If you run out
MATH H53 : Final exam 11 May, 18 Name: You have 18 minutes to answer the questions. Use of calculators or any electronic items is not permitted. Answer the questions in the space provided. If you run out
Representation and Learning of. Klas Nordberg Gosta Granlund Hans Knutsson
 Representation and Learning of Invariance Klas Nordberg Gosta Granlund Hans Knutsson LiTH-ISY-R-55 994-0- Representation and Learning of Invariance Klas Nordberg Gosta Granlund Hans Knutsson Computer Vision
Representation and Learning of Invariance Klas Nordberg Gosta Granlund Hans Knutsson LiTH-ISY-R-55 994-0- Representation and Learning of Invariance Klas Nordberg Gosta Granlund Hans Knutsson Computer Vision
Math 223 Final. July 24, 2014
 Math 223 Final July 24, 2014 Name Directions: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 Total 1. No books, notes, or evil looks. You may use a calculator to do routine arithmetic computations. You may not use your
Math 223 Final July 24, 2014 Name Directions: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 Total 1. No books, notes, or evil looks. You may use a calculator to do routine arithmetic computations. You may not use your
Have a Safe Winter Break
 SI: Math 122 Final December 8, 2015 EF: Name 1-2 /20 3-4 /20 5-6 /20 7-8 /20 9-10 /20 11-12 /20 13-14 /20 15-16 /20 17-18 /20 19-20 /20 Directions: Total / 200 1. No books, notes or Keshara in any word
SI: Math 122 Final December 8, 2015 EF: Name 1-2 /20 3-4 /20 5-6 /20 7-8 /20 9-10 /20 11-12 /20 13-14 /20 15-16 /20 17-18 /20 19-20 /20 Directions: Total / 200 1. No books, notes or Keshara in any word
Math 122 Test 3. April 17, 2018
 SI: Math Test 3 April 7, 08 EF: 3 4 5 6 7 8 9 0 Total Name Directions:. No books, notes or April showers. You may use a calculator to do routine arithmetic computations. You may not use your calculator
SI: Math Test 3 April 7, 08 EF: 3 4 5 6 7 8 9 0 Total Name Directions:. No books, notes or April showers. You may use a calculator to do routine arithmetic computations. You may not use your calculator
Math 121 (Lesieutre); 9.1: Polar coordinates; November 22, 2017
; 9.1: Polar coordinates; November 22, 2017") Math 2 Lesieutre; 9: Polar coordinates; November 22, 207 Plot the point 2, 2 in the plane If you were trying to describe this point to a friend, how could you do it? One option would be coordinates, but
Math 2 Lesieutre; 9: Polar coordinates; November 22, 207 Plot the point 2, 2 in the plane If you were trying to describe this point to a friend, how could you do it? One option would be coordinates, but
Math 104 Midterm 3 review November 12, 2018
 Math 04 Midterm review November, 08 If you want to review in the textbook, here are the relevant sections: 4., 4., 4., 4.4, 4..,.,. 6., 6., 6., 6.4 7., 7., 7., 7.4. Consider a right triangle with base
Math 04 Midterm review November, 08 If you want to review in the textbook, here are the relevant sections: 4., 4., 4., 4.4, 4..,.,. 6., 6., 6., 6.4 7., 7., 7., 7.4. Consider a right triangle with base
Curvilinear coordinates
 C Curvilinear coordinates The distance between two points Euclidean space takes the simplest form (2-4) in Cartesian coordinates. The geometry of concrete physical problems may make non-cartesian coordinates
C Curvilinear coordinates The distance between two points Euclidean space takes the simplest form (2-4) in Cartesian coordinates. The geometry of concrete physical problems may make non-cartesian coordinates
Practice Differentiation Math 120 Calculus I Fall 2015
 . x. Hint.. (4x 9) 4x + 9. Hint. Practice Differentiation Math 0 Calculus I Fall 0 The rules of differentiation are straightforward, but knowing when to use them and in what order takes practice. Although
. x. Hint.. (4x 9) 4x + 9. Hint. Practice Differentiation Math 0 Calculus I Fall 0 The rules of differentiation are straightforward, but knowing when to use them and in what order takes practice. Although
36. Double Integration over Non-Rectangular Regions of Type II
 36. Double Integration over Non-Rectangular Regions of Type II When establishing the bounds of a double integral, visualize an arrow initially in the positive x direction or the positive y direction. A
36. Double Integration over Non-Rectangular Regions of Type II When establishing the bounds of a double integral, visualize an arrow initially in the positive x direction or the positive y direction. A
A sequence { a n } converges if a n = finite number. Otherwise, { a n }
 9.1 Infinite Sequences Ex 1: Write the first four terms and determine if the sequence { a n } converges or diverges given a n =(2n) 1 /2n A sequence { a n } converges if a n = finite number. Otherwise,
9.1 Infinite Sequences Ex 1: Write the first four terms and determine if the sequence { a n } converges or diverges given a n =(2n) 1 /2n A sequence { a n } converges if a n = finite number. Otherwise,
4.10 Dirichlet problem in the circle and the Poisson kernel
 220 CHAPTER 4. FOURIER SERIES AND PDES 4.10 Dirichlet problem in the circle and the Poisson kernel Note: 2 lectures,, 9.7 in [EP], 10.8 in [BD] 4.10.1 Laplace in polar coordinates Perhaps a more natural
220 CHAPTER 4. FOURIER SERIES AND PDES 4.10 Dirichlet problem in the circle and the Poisson kernel Note: 2 lectures,, 9.7 in [EP], 10.8 in [BD] 4.10.1 Laplace in polar coordinates Perhaps a more natural
MATH 332: Vector Analysis Summer 2005 Homework
 MATH 332, (Vector Analysis), Summer 2005: Homework 1 Instructor: Ivan Avramidi MATH 332: Vector Analysis Summer 2005 Homework Set 1. (Scalar Product, Equation of a Plane, Vector Product) Sections: 1.9,
MATH 332, (Vector Analysis), Summer 2005: Homework 1 Instructor: Ivan Avramidi MATH 332: Vector Analysis Summer 2005 Homework Set 1. (Scalar Product, Equation of a Plane, Vector Product) Sections: 1.9,
Lecture 2 : Curvilinear Coordinates
 Lecture 2 : Curvilinear Coordinates Fu-Jiun Jiang October, 200 I. INTRODUCTION A. Definition and Notations In 3-dimension Euclidean space, a vector V can be written as V = e x V x + e y V y + e z V z with
Lecture 2 : Curvilinear Coordinates Fu-Jiun Jiang October, 200 I. INTRODUCTION A. Definition and Notations In 3-dimension Euclidean space, a vector V can be written as V = e x V x + e y V y + e z V z with
MATH 135: COMPLEX NUMBERS
 MATH 135: COMPLEX NUMBERS (WINTER, 010) The complex numbers C are important in just about every branch of mathematics. These notes 1 present some basic facts about them. 1. The Complex Plane A complex
MATH 135: COMPLEX NUMBERS (WINTER, 010) The complex numbers C are important in just about every branch of mathematics. These notes 1 present some basic facts about them. 1. The Complex Plane A complex
A Probabilistic Definition of Intrinsic Dimensionality for Images
 A Probabilistic Definition of Intrinsic Dimensionality for Images Michael Felsberg 1 and Norbert Krüger 2 1 Computer Vision Laboratory, Dept. of Electrical Engineering, Linköping University SE-58183 Linköping,
A Probabilistic Definition of Intrinsic Dimensionality for Images Michael Felsberg 1 and Norbert Krüger 2 1 Computer Vision Laboratory, Dept. of Electrical Engineering, Linköping University SE-58183 Linköping,
3 + 4i 2 + 3i. 3 4i Fig 1b
 The introduction of complex numbers in the 16th century was a natural step in a sequence of extensions of the positive integers, starting with the introduction of negative numbers (to solve equations of
The introduction of complex numbers in the 16th century was a natural step in a sequence of extensions of the positive integers, starting with the introduction of negative numbers (to solve equations of
IB Mathematics HL Year 1 Unit 4: Trigonometry (Core Topic 3) Homework for Unit 4. (A) Using the diagram to the right show that
 Homework for Unit 4. (A) Using the diagram to the right show that") IB Mathematics HL Year Unit 4: Trigonometry (Core Topic 3) Homework for Unit 4 Lesson 4 Review I: radian measure, definitions of trig ratios, and areas of triangles D.2: 5; E.: 5; E.2: 4, 6; F: 3, 5, 7,
IB Mathematics HL Year Unit 4: Trigonometry (Core Topic 3) Homework for Unit 4 Lesson 4 Review I: radian measure, definitions of trig ratios, and areas of triangles D.2: 5; E.: 5; E.2: 4, 6; F: 3, 5, 7,
Boundary Value Problems in Cylindrical Coordinates
 Boundary Value Problems in Cylindrical Coordinates 29 Outline Differential Operators in Various Coordinate Systems Laplace Equation in Cylindrical Coordinates Systems Bessel Functions Wave Equation the
Boundary Value Problems in Cylindrical Coordinates 29 Outline Differential Operators in Various Coordinate Systems Laplace Equation in Cylindrical Coordinates Systems Bessel Functions Wave Equation the
f(f 1 (x)) = x HOMEWORK DAY 2 Due Thursday, August 23rd Online: 6.2a: 1,2,5,7,9,13,15,16,17,20, , # 8,10,12 (graph exponentials) 2.
) = x HOMEWORK DAY 2 Due Thursday, August 23rd Online: 6.2a: 1,2,5,7,9,13,15,16,17,20, , # 8,10,12 (graph exponentials) 2.") Math 63: FALL 202 HOMEWORK Below is a list of online problems (go through webassign), and a second set that you need to write up and turn in on the given due date, in class. Each day, you need to work
Math 63: FALL 202 HOMEWORK Below is a list of online problems (go through webassign), and a second set that you need to write up and turn in on the given due date, in class. Each day, you need to work
Wed. Sept 28th: 1.3 New Functions from Old Functions: o vertical and horizontal shifts o vertical and horizontal stretching and reflecting o
 Homework: Appendix A: 1, 2, 3, 5, 6, 7, 8, 11, 13-33(odd), 34, 37, 38, 44, 45, 49, 51, 56. Appendix B: 3, 6, 7, 9, 11, 14, 16-21, 24, 29, 33, 36, 37, 42. Appendix D: 1, 2, 4, 9, 11-20, 23, 26, 28, 29,
Homework: Appendix A: 1, 2, 3, 5, 6, 7, 8, 11, 13-33(odd), 34, 37, 38, 44, 45, 49, 51, 56. Appendix B: 3, 6, 7, 9, 11, 14, 16-21, 24, 29, 33, 36, 37, 42. Appendix D: 1, 2, 4, 9, 11-20, 23, 26, 28, 29,
M361 Theory of functions of a complex variable
 M361 Theory of functions of a complex variable T. Perutz U.T. Austin, Fall 2012 Lecture 4: Exponentials and logarithms We have already been making free use of the sine and cosine functions, cos: R R, sin:
M361 Theory of functions of a complex variable T. Perutz U.T. Austin, Fall 2012 Lecture 4: Exponentials and logarithms We have already been making free use of the sine and cosine functions, cos: R R, sin:
m(x) = f(x) + g(x) m (x) = f (x) + g (x) (The Sum Rule) n(x) = f(x) g(x) n (x) = f (x) g (x) (The Difference Rule)
 = f(x) + g(x) m (x) = f (x) + g (x) (The Sum Rule) n(x) = f(x) g(x) n (x) = f (x) g (x) (The Difference Rule)") Chapter 3 Differentiation Rules 3.1 Derivatives of Polynomials and Exponential Functions Aka The Short Cuts! Yay! f(x) = c f (x) = 0 g(x) = x g (x) = 1 h(x) = x n h (x) = n x n-1 (The Power Rule) k(x)
Chapter 3 Differentiation Rules 3.1 Derivatives of Polynomials and Exponential Functions Aka The Short Cuts! Yay! f(x) = c f (x) = 0 g(x) = x g (x) = 1 h(x) = x n h (x) = n x n-1 (The Power Rule) k(x)
(15) since D U ( (17)
 since D U ( (17)") 7 his is the support document for the proofs of emmas and heorems in Paper Optimal Design Of inear Space Codes For Indoor MIMO Visible ight Communications With M Detection submitted to IEEE Photonics Journal
7 his is the support document for the proofs of emmas and heorems in Paper Optimal Design Of inear Space Codes For Indoor MIMO Visible ight Communications With M Detection submitted to IEEE Photonics Journal
2018 Best Student Exam Solutions Texas A&M High School Students Contest October 20, 2018
 08 Best Student Exam Solutions Texas A&M High School Students Contest October 0, 08. You purchase a stock and later sell it for $44 per share. When you do, you notice that the percent increase was the
08 Best Student Exam Solutions Texas A&M High School Students Contest October 0, 08. You purchase a stock and later sell it for $44 per share. When you do, you notice that the percent increase was the
Math 232: Final Exam Version A Spring 2015 Instructor: Linda Green
 Math 232: Final Exam Version A Spring 2015 Instructor: Linda Green Name: 1. Calculators are allowed. 2. You must show work for full and partial credit unless otherwise noted. In particular, you must evaluate
Math 232: Final Exam Version A Spring 2015 Instructor: Linda Green Name: 1. Calculators are allowed. 2. You must show work for full and partial credit unless otherwise noted. In particular, you must evaluate
MATHEMATICS 200 April 2010 Final Exam Solutions
 MATHEMATICS April Final Eam Solutions. (a) A surface z(, y) is defined by zy y + ln(yz). (i) Compute z, z y (ii) Evaluate z and z y in terms of, y, z. at (, y, z) (,, /). (b) A surface z f(, y) has derivatives
MATHEMATICS April Final Eam Solutions. (a) A surface z(, y) is defined by zy y + ln(yz). (i) Compute z, z y (ii) Evaluate z and z y in terms of, y, z. at (, y, z) (,, /). (b) A surface z f(, y) has derivatives
REFLECTION AND REFRACTION OF PLANE EM WAVES
 REFLECTION AND REFRACTION OF PLANE EM WAVES When an electromagnetic wave hits a boundary between different materials, some of the wave s energy is reflected back while the rest continues on through the
REFLECTION AND REFRACTION OF PLANE EM WAVES When an electromagnetic wave hits a boundary between different materials, some of the wave s energy is reflected back while the rest continues on through the
1 Functions and Inverses
 October, 08 MAT86 Week Justin Ko Functions and Inverses Definition. A function f : D R is a rule that assigns each element in a set D to eactly one element f() in R. The set D is called the domain of f.
October, 08 MAT86 Week Justin Ko Functions and Inverses Definition. A function f : D R is a rule that assigns each element in a set D to eactly one element f() in R. The set D is called the domain of f.
In this chapter we study elliptical PDEs. That is, PDEs of the form. 2 u = lots,
 Chapter 8 Elliptic PDEs In this chapter we study elliptical PDEs. That is, PDEs of the form 2 u = lots, where lots means lower-order terms (u x, u y,..., u, f). Here are some ways to think about the physical
Chapter 8 Elliptic PDEs In this chapter we study elliptical PDEs. That is, PDEs of the form 2 u = lots, where lots means lower-order terms (u x, u y,..., u, f). Here are some ways to think about the physical
Types of Real Integrals
 Math B: Complex Variables Types of Real Integrals p(x) I. Integrals of the form P.V. dx where p(x) and q(x) are polynomials and q(x) q(x) has no eros (for < x < ) and evaluate its integral along the fol-
Math B: Complex Variables Types of Real Integrals p(x) I. Integrals of the form P.V. dx where p(x) and q(x) are polynomials and q(x) q(x) has no eros (for < x < ) and evaluate its integral along the fol-
MTH 362: Advanced Engineering Mathematics
 MTH 362: Advanced Engineering Mathematics Lecture 1 Jonathan A. Chávez Casillas 1 1 University of Rhode Island Department of Mathematics September 7, 2017 Course Name and number: MTH 362: Advanced Engineering
MTH 362: Advanced Engineering Mathematics Lecture 1 Jonathan A. Chávez Casillas 1 1 University of Rhode Island Department of Mathematics September 7, 2017 Course Name and number: MTH 362: Advanced Engineering
Math 122 Test 3. April 15, 2014
 SI: Math 1 Test 3 April 15, 014 EF: 1 3 4 5 6 7 8 Total Name Directions: 1. No books, notes or 6 year olds with ear infections. You may use a calculator to do routine arithmetic computations. You may not
SI: Math 1 Test 3 April 15, 014 EF: 1 3 4 5 6 7 8 Total Name Directions: 1. No books, notes or 6 year olds with ear infections. You may use a calculator to do routine arithmetic computations. You may not
lim when the limit on the right exists, the improper integral is said to converge to that limit.
 hapter 7 Applications of esidues - evaluation of definite and improper integrals occurring in real analysis and applied math - finding inverse Laplace transform by the methods of summing residues. 6. Evaluation
hapter 7 Applications of esidues - evaluation of definite and improper integrals occurring in real analysis and applied math - finding inverse Laplace transform by the methods of summing residues. 6. Evaluation
Main topics for the First Midterm Exam
 Main topics for the First Midterm Exam The final will cover Sections.-.0, 2.-2.5, and 4.. This is roughly the material from first three homeworks and three quizzes, in addition to the lecture on Monday,
Main topics for the First Midterm Exam The final will cover Sections.-.0, 2.-2.5, and 4.. This is roughly the material from first three homeworks and three quizzes, in addition to the lecture on Monday,
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Contents. MATH 32B-2 (18W) (L) G. Liu / (TA) A. Zhou Calculus of Several Variables. 1 Multiple Integrals 3. 2 Vector Fields 9
 (L) G. Liu / (TA) A. Zhou Calculus of Several Variables. 1 Multiple Integrals 3. 2 Vector Fields 9") MATH 32B-2 (8W) (L) G. Liu / (TA) A. Zhou Calculus of Several Variables Contents Multiple Integrals 3 2 Vector Fields 9 3 Line and Surface Integrals 5 4 The Classical Integral Theorems 9 MATH 32B-2 (8W)
MATH 32B-2 (8W) (L) G. Liu / (TA) A. Zhou Calculus of Several Variables Contents Multiple Integrals 3 2 Vector Fields 9 3 Line and Surface Integrals 5 4 The Classical Integral Theorems 9 MATH 32B-2 (8W)
Review for the First Midterm Exam
 Review for the First Midterm Exam Thomas Morrell 5 pm, Sunday, 4 April 9 B9 Van Vleck Hall For the purpose of creating questions for this review session, I did not make an effort to make any of the numbers
Review for the First Midterm Exam Thomas Morrell 5 pm, Sunday, 4 April 9 B9 Van Vleck Hall For the purpose of creating questions for this review session, I did not make an effort to make any of the numbers
Web Solutions for How to Read and Do Proofs
 Web Solutions for How to Read and Do Proofs An Introduction to Mathematical Thought Processes Sixth Edition Daniel Solow Department of Operations Weatherhead School of Management Case Western Reserve University
Web Solutions for How to Read and Do Proofs An Introduction to Mathematical Thought Processes Sixth Edition Daniel Solow Department of Operations Weatherhead School of Management Case Western Reserve University
4.4: Optimization. Problem 2 Find the radius of a cylindrical container with a volume of 2π m 3 that minimizes the surface area.
 4.4: Optimization Problem 1 Suppose you want to maximize a continuous function on a closed interval, but you find that it only has one local extremum on the interval which happens to be a local minimum.
4.4: Optimization Problem 1 Suppose you want to maximize a continuous function on a closed interval, but you find that it only has one local extremum on the interval which happens to be a local minimum.
SWINGING UP A PENDULUM BY ENERGY CONTROL
 Paper presented at IFAC 13th World Congress, San Francisco, California, 1996 SWINGING UP A PENDULUM BY ENERGY CONTROL K. J. Åström and K. Furuta Department of Automatic Control Lund Institute of Technology,
Paper presented at IFAC 13th World Congress, San Francisco, California, 1996 SWINGING UP A PENDULUM BY ENERGY CONTROL K. J. Åström and K. Furuta Department of Automatic Control Lund Institute of Technology,
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Precalculus Honors Problem Set: Elementary Trigonometry
 Precalculus Honors Problem Set: Elementary Trigonometry Mr. Warkentin 03 Sprague Hall 017-018 Academic Year Directions: These questions are not presented in order of difficulty. Some of these questions
Precalculus Honors Problem Set: Elementary Trigonometry Mr. Warkentin 03 Sprague Hall 017-018 Academic Year Directions: These questions are not presented in order of difficulty. Some of these questions
Separation of Variables in Polar and Spherical Coordinates
 Separation of Variables in Polar and Spherical Coordinates Polar Coordinates Suppose we are given the potential on the inside surface of an infinitely long cylindrical cavity, and we want to find the potential
Separation of Variables in Polar and Spherical Coordinates Polar Coordinates Suppose we are given the potential on the inside surface of an infinitely long cylindrical cavity, and we want to find the potential
Figure 21:The polar and Cartesian coordinate systems.
 Figure 21:The polar and Cartesian coordinate systems. Coordinate systems in R There are three standard coordinate systems which are used to describe points in -dimensional space. These coordinate systems
Figure 21:The polar and Cartesian coordinate systems. Coordinate systems in R There are three standard coordinate systems which are used to describe points in -dimensional space. These coordinate systems
MATH 434 Fall 2016 Homework 1, due on Wednesday August 31
 Homework 1, due on Wednesday August 31 Problem 1. Let z = 2 i and z = 3 + 4i. Write the product zz and the quotient z z in the form a + ib, with a, b R. Problem 2. Let z C be a complex number, and let
Homework 1, due on Wednesday August 31 Problem 1. Let z = 2 i and z = 3 + 4i. Write the product zz and the quotient z z in the form a + ib, with a, b R. Problem 2. Let z C be a complex number, and let
The definite integral gives the area under the curve. Simplest use of FTC1: derivative of integral is original function.
 5.3: The Fundamental Theorem of Calculus EX. Given the graph of f, sketch the graph of x 0 f(t) dt. The definite integral gives the area under the curve. EX 2. Find the derivative of g(x) = x 0 + t 2 dt.
5.3: The Fundamental Theorem of Calculus EX. Given the graph of f, sketch the graph of x 0 f(t) dt. The definite integral gives the area under the curve. EX 2. Find the derivative of g(x) = x 0 + t 2 dt.
1 Assignment 1: Nonlinear dynamics (due September
 Assignment : Nonlinear dynamics (due September 4, 28). Consider the ordinary differential equation du/dt = cos(u). Sketch the equilibria and indicate by arrows the increase or decrease of the solutions.
Assignment : Nonlinear dynamics (due September 4, 28). Consider the ordinary differential equation du/dt = cos(u). Sketch the equilibria and indicate by arrows the increase or decrease of the solutions.
PRACTICE PROBLEMS FOR MIDTERM I
 Problem. Find the limits or explain why they do not exist (i) lim x,y 0 x +y 6 x 6 +y ; (ii) lim x,y,z 0 x 6 +y 6 +z 6 x +y +z. (iii) lim x,y 0 sin(x +y ) x +y Problem. PRACTICE PROBLEMS FOR MIDTERM I
Problem. Find the limits or explain why they do not exist (i) lim x,y 0 x +y 6 x 6 +y ; (ii) lim x,y,z 0 x 6 +y 6 +z 6 x +y +z. (iii) lim x,y 0 sin(x +y ) x +y Problem. PRACTICE PROBLEMS FOR MIDTERM I
Metric spaces and metrizability
 1 Motivation Metric spaces and metrizability By this point in the course, this section should not need much in the way of motivation. From the very beginning, we have talked about R n usual and how relatively
1 Motivation Metric spaces and metrizability By this point in the course, this section should not need much in the way of motivation. From the very beginning, we have talked about R n usual and how relatively
CHAPTER ONE FUNCTIONS AND GRAPHS. In everyday life, many quantities depend on one or more changing variables eg:
 CHAPTER ONE FUNCTIONS AND GRAPHS 1.0 Introduction to Functions In everyday life, many quantities depend on one or more changing variables eg: (a) plant growth depends on sunlight and rainfall (b) speed
CHAPTER ONE FUNCTIONS AND GRAPHS 1.0 Introduction to Functions In everyday life, many quantities depend on one or more changing variables eg: (a) plant growth depends on sunlight and rainfall (b) speed
Riesz-Transforms vs. Derivatives: On the Relationship Between the Boundary Tensor and the Energy Tensor
 Riesz-Transforms vs. Derivatives: On the Relationship Between the Boundary Tensor and the Energy Tensor Ullrich Köthe 1 and Michael Felsberg 1 Cognitive Systems Group, University of Hamburg koethe@informatik.uni-hamburg.de
Riesz-Transforms vs. Derivatives: On the Relationship Between the Boundary Tensor and the Energy Tensor Ullrich Köthe 1 and Michael Felsberg 1 Cognitive Systems Group, University of Hamburg koethe@informatik.uni-hamburg.de
(x 1, y 1 ) = (x 2, y 2 ) if and only if x 1 = x 2 and y 1 = y 2.
 = (x 2, y 2 ) if and only if x 1 = x 2 and y 1 = y 2.") 1. Complex numbers A complex number z is defined as an ordered pair z = (x, y), where x and y are a pair of real numbers. In usual notation, we write z = x + iy, where i is a symbol. The operations of
1. Complex numbers A complex number z is defined as an ordered pair z = (x, y), where x and y are a pair of real numbers. In usual notation, we write z = x + iy, where i is a symbol. The operations of
MATH Max-min Theory Fall 2016
 MATH 20550 Max-min Theory Fall 2016 1. Definitions and main theorems Max-min theory starts with a function f of a vector variable x and a subset D of the domain of f. So far when we have worked with functions
MATH 20550 Max-min Theory Fall 2016 1. Definitions and main theorems Max-min theory starts with a function f of a vector variable x and a subset D of the domain of f. So far when we have worked with functions
Written test, 25 problems / 90 minutes
 Sponsored by: UGA Math Department and UGA Math Club Written test, 5 problems / 90 minutes October, 06 WITH SOLUTIONS Problem. Let a represent a digit from to 9. Which a gives a! aa + a = 06? Here aa indicates
Sponsored by: UGA Math Department and UGA Math Club Written test, 5 problems / 90 minutes October, 06 WITH SOLUTIONS Problem. Let a represent a digit from to 9. Which a gives a! aa + a = 06? Here aa indicates
Lecture 10. Example: Friction and Motion
 Lecture 10 Goals: Exploit Newton s 3 rd Law in problems with friction Employ Newton s Laws in 2D problems with circular motion Assignment: HW5, (Chapter 7, due 2/24, Wednesday) For Tuesday: Finish reading
Lecture 10 Goals: Exploit Newton s 3 rd Law in problems with friction Employ Newton s Laws in 2D problems with circular motion Assignment: HW5, (Chapter 7, due 2/24, Wednesday) For Tuesday: Finish reading
Major Ideas in Calc 3 / Exam Review Topics
 Major Ideas in Calc 3 / Exam Review Topics Here are some highlights of the things you should know to succeed in this class. I can not guarantee that this list is exhaustive!!!! Please be sure you are able
Major Ideas in Calc 3 / Exam Review Topics Here are some highlights of the things you should know to succeed in this class. I can not guarantee that this list is exhaustive!!!! Please be sure you are able
ENGI Partial Differentiation Page y f x
 ENGI 3424 4 Partial Differentiation Page 4-01 4. Partial Differentiation For functions of one variable, be found unambiguously by differentiation: y f x, the rate of change of the dependent variable can
ENGI 3424 4 Partial Differentiation Page 4-01 4. Partial Differentiation For functions of one variable, be found unambiguously by differentiation: y f x, the rate of change of the dependent variable can
Boundary value problems for partial differential equations
 Boundary value problems for partial differential equations Henrik Schlichtkrull March 11, 213 1 Boundary value problem 2 1 Introduction This note contains a brief introduction to linear partial differential
Boundary value problems for partial differential equations Henrik Schlichtkrull March 11, 213 1 Boundary value problem 2 1 Introduction This note contains a brief introduction to linear partial differential
ENGI 2422 First Order ODEs - Separable Page 3-01
 ENGI 4 First Order ODEs - Separable Page 3-0 3. Ordinary Differential Equations Equations involving only one independent variable and one or more dependent variables, together with their derivatives with
ENGI 4 First Order ODEs - Separable Page 3-0 3. Ordinary Differential Equations Equations involving only one independent variable and one or more dependent variables, together with their derivatives with
154 Chapter 9 Hints, Answers, and Solutions The particular trajectories are highlighted in the phase portraits below.
 54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
Solving the 3D Laplace Equation by Meshless Collocation via Harmonic Kernels
 Solving the 3D Laplace Equation by Meshless Collocation via Harmonic Kernels Y.C. Hon and R. Schaback April 9, Abstract This paper solves the Laplace equation u = on domains Ω R 3 by meshless collocation
Solving the 3D Laplace Equation by Meshless Collocation via Harmonic Kernels Y.C. Hon and R. Schaback April 9, Abstract This paper solves the Laplace equation u = on domains Ω R 3 by meshless collocation
Non-Linear Dynamics Homework Solutions Week 6
 Non-Linear Dynamics Homework Solutions Week 6 Chris Small March 6, 2007 Please email me at smachr09@evergreen.edu with any questions or concerns reguarding these solutions. 6.8.3 Locate annd find the index
Non-Linear Dynamics Homework Solutions Week 6 Chris Small March 6, 2007 Please email me at smachr09@evergreen.edu with any questions or concerns reguarding these solutions. 6.8.3 Locate annd find the index
CS2800 Fall 2013 October 23, 2013
 Discrete Structures Stirling Numbers CS2800 Fall 203 October 23, 203 The text mentions Stirling numbers briefly but does not go into them in any depth. However, they are fascinating numbers with a lot
Discrete Structures Stirling Numbers CS2800 Fall 203 October 23, 203 The text mentions Stirling numbers briefly but does not go into them in any depth. However, they are fascinating numbers with a lot
The Deep Ritz method: A deep learning-based numerical algorithm for solving variational problems
 The Deep Ritz method: A deep learning-based numerical algorithm for solving variational problems Weinan E 1 and Bing Yu 2 arxiv:1710.00211v1 [cs.lg] 30 Sep 2017 1 The Beijing Institute of Big Data Research,
The Deep Ritz method: A deep learning-based numerical algorithm for solving variational problems Weinan E 1 and Bing Yu 2 arxiv:1710.00211v1 [cs.lg] 30 Sep 2017 1 The Beijing Institute of Big Data Research,
GEOMETRY AND COMPLEX NUMBERS (January 23, 2004) 5
 5") GEOMETRY AND COMPLEX NUMBERS (January 23, 2004) 5 4. Stereographic Projection There are two special projections: one onto the x-axis, the other onto the y-axis. Both are well-known. Using those projections
GEOMETRY AND COMPLEX NUMBERS (January 23, 2004) 5 4. Stereographic Projection There are two special projections: one onto the x-axis, the other onto the y-axis. Both are well-known. Using those projections
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Topic 4 Notes Jeremy Orloff
 Topic 4 Notes Jeremy Orloff 4 Complex numbers and exponentials 4.1 Goals 1. Do arithmetic with complex numbers.. Define and compute: magnitude, argument and complex conjugate of a complex number. 3. Euler
Topic 4 Notes Jeremy Orloff 4 Complex numbers and exponentials 4.1 Goals 1. Do arithmetic with complex numbers.. Define and compute: magnitude, argument and complex conjugate of a complex number. 3. Euler
Complex Numbers and the Complex Exponential
 Complex Numbers and the Complex Exponential φ (2+i) i 2 θ φ 2+i θ 1 2 1. Complex numbers The equation x 2 + 1 0 has no solutions, because for any real number x the square x 2 is nonnegative, and so x 2
Complex Numbers and the Complex Exponential φ (2+i) i 2 θ φ 2+i θ 1 2 1. Complex numbers The equation x 2 + 1 0 has no solutions, because for any real number x the square x 2 is nonnegative, and so x 2
PH1104/PH114S - MECHANICS
 PH04/PH4S - MECHANICS FAISAN DAY FALL 06 MULTIPLE CHOICE ANSWES. (E) the first four options are clearly wrong since v x needs to change its sign at a moment during the motion and there s no way v x could
PH04/PH4S - MECHANICS FAISAN DAY FALL 06 MULTIPLE CHOICE ANSWES. (E) the first four options are clearly wrong since v x needs to change its sign at a moment during the motion and there s no way v x could
Ordinary Differential Equations (ODEs)
") c01.tex 8/10/2010 22: 55 Page 1 PART A Ordinary Differential Equations (ODEs) Chap. 1 First-Order ODEs Sec. 1.1 Basic Concepts. Modeling To get a good start into this chapter and this section, quickly
c01.tex 8/10/2010 22: 55 Page 1 PART A Ordinary Differential Equations (ODEs) Chap. 1 First-Order ODEs Sec. 1.1 Basic Concepts. Modeling To get a good start into this chapter and this section, quickly
Solutions to Homework 5
 Solutions to Homework 5 1. Let z = f(x, y) be a twice continuously differentiable function of x and y. Let x = r cos θ and y = r sin θ be the equations which transform polar coordinates into rectangular
Solutions to Homework 5 1. Let z = f(x, y) be a twice continuously differentiable function of x and y. Let x = r cos θ and y = r sin θ be the equations which transform polar coordinates into rectangular
Core A-level mathematics reproduced from the QCA s Subject criteria for Mathematics document
 Core A-level mathematics reproduced from the QCA s Subject criteria for Mathematics document Background knowledge: (a) The arithmetic of integers (including HCFs and LCMs), of fractions, and of real numbers.
Core A-level mathematics reproduced from the QCA s Subject criteria for Mathematics document Background knowledge: (a) The arithmetic of integers (including HCFs and LCMs), of fractions, and of real numbers.
Two special equations: Bessel s and Legendre s equations. p Fourier-Bessel and Fourier-Legendre series. p
 LECTURE 1 Table of Contents Two special equations: Bessel s and Legendre s equations. p. 259-268. Fourier-Bessel and Fourier-Legendre series. p. 453-460. Boundary value problems in other coordinate system.
LECTURE 1 Table of Contents Two special equations: Bessel s and Legendre s equations. p. 259-268. Fourier-Bessel and Fourier-Legendre series. p. 453-460. Boundary value problems in other coordinate system.
Analysis-3 lecture schemes
 Analysis-3 lecture schemes (with Homeworks) 1 Csörgő István November, 2015 1 A jegyzet az ELTE Informatikai Kar 2015. évi Jegyzetpályázatának támogatásával készült Contents 1. Lesson 1 4 1.1. The Space
Analysis-3 lecture schemes (with Homeworks) 1 Csörgő István November, 2015 1 A jegyzet az ELTE Informatikai Kar 2015. évi Jegyzetpályázatának támogatásával készült Contents 1. Lesson 1 4 1.1. The Space
Practical in Numerical Astronomy, SS 2012 LECTURE 9
 Practical in Numerical Astronomy, SS 01 Elliptic partial differential equations. Poisson solvers. LECTURE 9 1. Gravity force and the equations of hydrodynamics. Poisson equation versus Poisson integral.
Practical in Numerical Astronomy, SS 01 Elliptic partial differential equations. Poisson solvers. LECTURE 9 1. Gravity force and the equations of hydrodynamics. Poisson equation versus Poisson integral.
Quantum Mechanics in 3-Dimensions
 Quantum Mechanics in 3-Dimensions Pavithran S Iyer, 2nd yr BSc Physics, Chennai Mathematical Institute Email: pavithra@cmi.ac.in August 28 th, 2009 1 Schrodinger equation in Spherical Coordinates 1.1 Transforming
Quantum Mechanics in 3-Dimensions Pavithran S Iyer, 2nd yr BSc Physics, Chennai Mathematical Institute Email: pavithra@cmi.ac.in August 28 th, 2009 1 Schrodinger equation in Spherical Coordinates 1.1 Transforming
1 Geometry of R Conic Sections Parametric Equations More Parametric Equations Polar Coordinates...
 Contents 1 Geometry of R 1.1 Conic Sections............................................ 1. Parametric Equations........................................ 3 1.3 More Parametric Equations.....................................
Contents 1 Geometry of R 1.1 Conic Sections............................................ 1. Parametric Equations........................................ 3 1.3 More Parametric Equations.....................................
Rigid Geometric Transformations
 Rigid Geometric Transformations Carlo Tomasi This note is a quick refresher of the geometry of rigid transformations in three-dimensional space, expressed in Cartesian coordinates. 1 Cartesian Coordinates
Rigid Geometric Transformations Carlo Tomasi This note is a quick refresher of the geometry of rigid transformations in three-dimensional space, expressed in Cartesian coordinates. 1 Cartesian Coordinates
Signals and Systems. Problem Set: The z-transform and DT Fourier Transform
 Signals and Systems Problem Set: The z-transform and DT Fourier Transform Updated: October 9, 7 Problem Set Problem - Transfer functions in MATLAB A discrete-time, causal LTI system is described by the
Signals and Systems Problem Set: The z-transform and DT Fourier Transform Updated: October 9, 7 Problem Set Problem - Transfer functions in MATLAB A discrete-time, causal LTI system is described by the
Calculus III: Practice Final
 Calculus III: Practice Final Name: Circle one: Section 6 Section 7. Read the problems carefully. Show your work unless asked otherwise. Partial credit will be given for incomplete work. The exam contains
Calculus III: Practice Final Name: Circle one: Section 6 Section 7. Read the problems carefully. Show your work unless asked otherwise. Partial credit will be given for incomplete work. The exam contains