Wave interactions and the analysis of the perturbed. Burgers equation
|
|
|
- Megan Daniel
- 5 years ago
- Views:
Transcription
1 Wave interactions and the analysis of the perturbed Burgers equation Alex Veksler 1 and Yair Zarmi 1,2 Ben-Gurion University of the Negev, Israel 1 Department of Physics, Beer-Sheva, Department of Energy & Environmental Physics Jacob Blaustein Institute for Desert Research, Sede-Boqer Campus, Abstract In multiple-front solutions of the Burgers equation, all the fronts, except for two, are generated through the inelastic interaction of exponential wave solutions of the Lax pair associated with the equation. The inelastically generated fronts are the source of two difficulties encountered in the standard Normal Form expansion of the approximate solution of the perturbed Burgers equation, when the zero-order term is a multiple-front solution: (i) The higher-order terms in the expansion are not bounded; (ii) The Normal Form (equation obeyed by the zero-order approximation) is not asymptotically integrable; its solutions lose the simple wave structure of the solutions of the unperturbed equation. The freedom inherent in the Normal Form method allows a simple modification of the expansion procedure, making it possible to overcome both problems in more than one way. The loss of asymptotic integrability is shifted from the Normal Form to the higher-order terms (part of which has to be computed numerically) in the expansion of the solution. The frontvelocity update is different from the one obtained in the standard analysis. PACS IK, Mv, a MSC 35Q58, 41A58, 35Q51 Key words: Burgers equation; Wave interactions; Normal Form expansion.
2 1. Introduction The Burgers equation [1] is the lowest order approximation for the one-dimensional propagation of weak shock waves in a fluid [2]. In recent years it has been employed in the description of the variation in vehicle density in highway traffic [3]. The equation is integrable. Its wave solutions are single-and multiple fronts. When a perturbation is added to the equation, its solutions are us u- ally analyzed by the extension of the method of Normal Forms [4-6] to PDE s [7-12]. In the standard Normal Form analysis, the higher-order terms in the expansion are assumed to be differential polynomials of the zero-order solution, that is, they depend on the independent variables, x and t, only through their dependence on the zero-order approximation. When the zero-order approximation is a single-front, the approximate solution generated by the standard Normal Form analysis is an asymptotically integrable series with bounded higher-order terms. However, when the zero-order is not a single front, in the standard analysis, terms appear in the higher orders of the perturbative expansion that may not be accounted for by any differential polynomials in the asymptotic series [9, 10]. The only way to handle these terms in the standard analysis is to include them in the Normal Form (equation obeyed by the zero-order approximation) [7-12]. Unfortunately, this procedure yields a Normal Form that is not asymptotically integrable. Consequently, its solutions lose the simple wave structure of the solutions of the unperturbed equation; hence the name obstacles to asymptotic integrability. Obstacles to integrability have been discussed extensively in the literature, in the cases of the perturbed KdV and NLS equations [7, 8, 11, 12]. It has been observed that obstacles to integrability in the Normal Form analysis are consequences of inelastic wave interactions [12]. In addition to the obstacles to integrability, the standard Normal Form analysis of the perturbed Burgers equation suffers from another serious problem: Some of the contributions to the higherorder terms in the approximate solution that are allowed by the formalism and can be computed in
3 closed form, become unbounded in the multiple-wave case. The two difficulties enumerated above limit the capacity of the standard analysis to generate asymptotically integrable perturbative expansions with bounded higher-order terms to a subset of the possible perturbations. The source of both problems will be shown to be the inelastic interaction of exponential wave solutions of the Lax pair [13-14] associated with the Burgers equation. First, unbounded terms occurring in higher orders in the expansion of the standard analysis emerge just along the inelastically generated fronts. Second, the mere existence of inelastic interactions leads to the emergence of obstacles to integrability. The freedom available in the standard analysis enables one to confine the effect of the obstacles to these fronts, along which, the obstacles asymptote to symmetries of the Burgers equation. As a result, even if a way is found that allows one to handle the obstacles to integrability within the series expansion of the solution rather than in the Normal Form, they ge n- erate secular behavior in the solution. The undesired effects of inelastic wave interactions, encountered in the standard analysis, can be avoided by exploiting the freedom in the expansion. The assumption, usually made in the standard analysis [7-12], that the higher-order corrections to the approximate solution of the perturbed equation depend on the independent variables, x and t only through their dependence on the zeroorder approximation, is not a pre-requisite of the Normal Form expansion procedure. Allowing higher-order corrections to depend explicitly on x and t, additional freedom is gained, which enables one to eliminate the undesired effects in more than one way. Whenever a secular term is generated in the expansion, this is a sign that a hidden symmetry (i.e., a term that asymptotes to a symmetry) has been missed. We identify these hidden symmetries, and assign them to the Normal Form. This takes care of unbounded terms generated either directly in the expansion, or through the effect of obstacles. This procedure yields an update of front-velocities that is different from the one obtained through the standard analysis.
4 The added freedom allows one to shift the terms that spoil integrability (e.g., remnants of obstacles, with the hidden symmetry contribution removed from them) from the Normal Form to the higher-order terms in the expansion of the solution. The loss of asymptotic integrability is inevitable, requiring that parts of the solution have to be computed numerically. However, the Normal Form remains asymptotically integrable. Hence, its solutions retain the simple wave structure of the solutions of the unperturbed equation. In Section 2, we review the properties of the wave-front solutions of the unperturbed Burgers equation. In the multiple-front case, the fronts are constructed from exponential wave solutions of the Lax pair associated with the Burgers equation. Two of the fronts are generated each from one exponential wave solution of the Lax pair, and are unaffected by the existence of other waves. All the remaining fronts are generated through the inelastic interaction of pairs of exponential waves with adjacent wave numbers. In Section 3, the known properties of the symmetries of the Burgers equation are reviewed. In Section 4, we review the Normal Form analysis of the perturbed equation. We show how obstacles to asymptotic integrability and unbounded (secular) terms emerge in the multiple-wave case, just along the inelastically generated fronts. In Section 5, we present a number of aspects of the freedom inherent in the perturbative expansion, including the freedom introduced due to the addition of explicit x and t dependence in the higher-order terms in the perturbation series. The remainder of the paper is dedicated to the exploitation of that freedom for circumventing the difficulties encountered in the standard analysis. We show two ways to achieve this goal through first order in the perturbation. In Section 6, the freedom is exploited to rigorously eliminate both obstacles to integrability as well as secular terms in the perturbation series. The price paid is that some contributions in the first-order correction to the solution have to be computed numerically. We find that these terms are bounded in both the single- and two-wave cases. They are non-
5 negligible and persist asymptotically away from the origin. The approximate solutions of the standard analysis and the alternative suggested in Section 6 are compared in Section 7. Within the error allowed by the perturbation formalism, they are equivalent. In Section 8, we present another alternative for circumventing obstacles to integrability and secular terms in the multiple-wave case. We exploit the fact that, away from the origin, all the fronts in a multiple-wave solution asymptote to well separated single fronts at an exponentially fast rate and that, for single fronts, the expansion generates an integrable series with bounded terms. The freedom in the expansion allows us to construct an asymptotically integrable Normal Form separately for each front. The numerical corrections in the first-order term in the expansion become exponentially small as the distance from the origin grows. 2. Inelastic wave interactions in the Burgers equation The wave solutions of the Burgers equation [1] u t = 2u u x + u xx (2.1) are fronts. The commonly studied solution is that of a front with one vanishing boundary value: u( t,x)= k ( ek x + k t + x 0 ) 1 + e k ( x + k t + x 0 ) (2.2) The general single-front solution, with nonvanishing boundary values at both x = ± 8, will surface in the analysis of multiple-wave solutions. It is obtained from Eq. (2.2) by a Galilean transformation, and has the form u( t, x)= u + u ( m p ek x + vt + x0 ) 1 + e k ( x + vt + x 0 ), v = u p + u m, k = u p u m (2.3)
6 The fronts, Eqs. (2.2) and (2.3), are generated by exponential wave solutions of the linearization of Eq. (2.1) through the Lax pair [13,14] associated with the Burgers equation, given by [15-18]. For the solution of Eq. (2.2), the Lax pair is y x = u y (2.4) y t = y xx (2.5) Linear combinations of wave solutions of this Lax pair generate multiple-wave solutions of the Burgers equation, given by u( t, x)= M i=1 k i e k i( x + k i t + x i,0 ) M 1 + e k i ( x + k i t + x i, 0 ) i=1 (2.6) For later use, we define the characteristic line of each exponential wave solution by x = k i t x i, 0 (2.7) u(t,x) of Eq. (2.6) vanishes asymptotically in a triangular wedge in the x t plane, defined by some pair of two adjacent characteristic lines. The direction in which the solution vanishes depends on the values of the wave numbers, k i. Without loss of generality, we assume that all wave numbers are positive, and arrange them in ascending order: 0 < k < k < < (2.8) 1 2 k M The solution then vanishes between the characteristic lines defined by k 1 and k M. (If some of the wave numbers are negative, then the zero-boundary value is common to the fronts generated by k, the wave number with highest negative value, by k +, the wave number with lowest positive value.)
7 As a solution with non-zero boundary values can always be transformed into one with one vanishing boundary value by a Galilean transformation, we focus on the solution given in Eq. (2.6). The single-wave solution describes a front of infinite extent along its characteristic line. The solution with M > 1 waves (Eq. (2.6)) describes (M + 1) semi-infinite fronts, each extending along one half of some characteristic line. All the fronts collide in the vicinity of the origin. The locations of the collision points depend on the shifts x i,0. The collision region is a finite domain around the origin in the x t plane. Fig. 1 shows examples of single- and three-wave solution. The multiple-wave solution has remarkable properties: (i) Away from the collision region all fronts asymptote exponentially fast to single-front solutions; (ii) Two of the asymptotic fronts have one vanishing boundary condition. They are not affected by the existence of other waves. Each of the two fronts is generated from one of the exponential wave solutions appearing in Eq. (2.6). Their characteristic lines are given by Eq. (2.7). (iii) The remaining (M 1) fronts are generated through the inelastic interaction of exponential waves with adjacent wave numbers. Each front has two nonzero boundary conditions. As an example, we analyze the two-wave solution, given by u( t, x)= k ( x + k1 t + x1,0 ) 1 + ek1 k2 e k 2 ( x + k 2 t + x 2, 0 ) 1 + e k 1( x + k 1 t + x 1, 0) k + e 2 ( x + k 2 t + x 2, 0 ) (2.9) Eq. (2.9) generates three semi-infinite fronts. Two of the fronts evolve along the characteristic lines of the two exponential waves. Away from the origin, they asymptote to single-front solutions, each with one vanishing boundary value, of the form of Eq. (2.2): ( ) t +, x k 2 t x 2,0 u t, x k 2 ek 2 ( x + k 2 t + x 2,0 ) 1 + e k 2 ( x + k 2 t + x 2, 0) (2.10a)
8 ( ) t, x k 1 t x 1, 0 u t, x k 1 ek 1 ( x + k 1 t + x 1, 0) 1 + e k 1 ( x + k 1 t + x 1, 0) (2.10b) The third semi-infinite front is generated by the inelastic interaction of the two exponential waves in Eq. (2.9), with a characteristic line defined by the equality of the two exponents appearing in Eq. (2.9): k 1 ( x + k 1 t + x 1,0 )= k 2 ( x + k 2 t + x 2, 0 ) x = k 1 + k 2 ( )t ξ ξ = k 2 x 2, 0 k 1 x 1, 0 k 2 k 1 (2.11) It asymptotes to a single-front solution, of the type given by Eq. (2.3), ( ) t, x k 1 + k 2 u t, x ( k + k e ( k 2 k 1 )( x + ( k 1 + k 2 )t + ξ) 1 2 )t ξ ( 1 + e k 2 k 1 )( x + ( k 1 + k 2 )t + ξ) (2.12) The boundary values of the asymptotic front described by Eq. (2.12) are both non-zero: k 1 and k 2 for x 8 and + 8, respectively, its wave number is k 2 k 1, and its velocity is k 2 + k 1. The picture in the case of M exponential waves is similar. The waves with wave numbers k 1 and k M generate semi-infinite fronts that asymptote to single fronts with one vanishing boundary value, given by Eq. (2.2). One front has k = k 1, and the other has k = k M. The remaining (M 1) semiinfinite fronts are generated by the inelastic interaction of waves with adjacent wave numbers, k i and k i + 1 (1 < i < M 1). They asymptote to single fronts, with both boundary values nonvanishing, k i and k i + 1, wave numbers (k i + 1 k i ) and velocities (k i k i ). 3. Symmetries of the Burgers equation As we shall use the symmetries of the Burgers equation repeatedly, we summarize their properties [16-18] in brief. The symmetries, S n, are solutions of the linearization of the Burgers equation t S n = 2 x ( u S n )+ 2 x S n (3.1)
9 Here u is a solution of Eq. (2.1). The hierarchy of symmetries obeys the recursion relation S n+ 1 = x { S n + ug n } (3.2) with G n [ u]= 1 x S n [ u], G 0 = 1 (3.3) Eqs. (3.2) and (3.3) yield a relation that will turn out to be useful in the following: S n = G n + 1 G 1 G n (3.4) For the present analysis, we shall need the first three symmetries (3.5) G 1 = u, S 1 = u x G 2 = u 2 + u x, S 2 = 2uu x + u xx G 3 = u 3 + 3uu x + u xx, S 3 = 3u 2 u x + 3uu xx + 3u 2 x + u xxx The Lie brackets of any two symmetries vanish S m [ u],s n [ u] i S m u i i x S n S n u x i i S m = 0 ( u i i x u). (3.6) When u is the single-front solution, Eq. (2.3), the hierarchy degenerates into a single symmetry. Using the recursion relation, Eq. (3.2) one can prove by induction that S n [ u]= c n S 1 u [ ] c n = u p ( ) n u m u p u m ( ) n (3.7) G n [ u]= c n G 1 [ u]+ u n m c n u m (3.8)
10 If one of the boundary values vanishes, then one also has G n [ u]= c n G 1 u [ ], c n = k n 1 (3.9) In the discussion of obstacles to asymptotic integrability, we shall encounter the entity R 21 = S 2 [ u]g 1 [ u] S 1 [ u]g 2 u [ ] (3.10) A trivial consequence of Eqs. (3.7) and (3.9) is that R 21 vanishes identically when u is a singlefront solution with one vanishing boundary value. 4. Difficulties in standard Normal Form expansion of perturbed Burgers equation Through first order, the perturbed Burgers equation is given by w t = 2w w x + w xx ( ) + ε 3α 1 w 2 w x + 3α 2 ww xx + 3α 3 w x 2 + α 4 w xxx (4.1) One now expands the solution in a Near Identity Transformation (NIT) w = u + εu ( 1) + O( ε 2 ) (4.2) One then allows for the possibility of including part of the effect of the perturbation in the evolution of the zero-order approximation, u, by imposing that it obeys a Normal Form (NF), given by u t = 2uu x + u xx + εu 1 + O( ε 2 ) (4.3) Inserting Eqs. (4.2) and (4.3) in Eq. (4.1), 0ne obtains the first-order homological equation: U 1 + t u ( 1) = 2 x ( u u ( 1) )+ 2 x u ( 1) + ( 3α 1 u 2 u x + 3α 2 u u xx + 3α 3 u 2 x + α 4 u xxx ) (4.4)
11 To generate both u (1) and U 1 from Eq. (4.4), one adds the requirement that u (1) must not develop unbounded (secular) behavior. This is obtained by assigning the resonant part in the driving term in Eq. (4.4) to U 1, so that it is moved from Eq. (4.4) to the NF, Eq. (4.3). The resonant term is proportional to the symmetry S 3 : ( ) (4.5) U 1 = µ S 3 [ u]= µ 3u 2 u x + 3uu xx + 3u 2 x + u xxx The value of the coefficient µ depends on the specific case. With this form of U 1, Eq. (4.3) is integrable. Its wave solutions are the single- and multiple-front solutions of the unperturbed equation, Eq. (2.1), with one modification: the velocities are updated due to the effect of the perturbation. In addition, properties of the symmetries, derived for the case when u was the solution of Eq. (2.1), hold also when u is a solution of the Normal Form, provided U 1 is a symmetry. This can be shown to be a consequence of the fact that the symmetries, S n, are differential polynomials in u and its spatial derivatives. In particular, Eqs. (3.7)-(3.9) hold when u is a single-wave solution. With U 1 of Eq. (4.5), Eq. (4.4) becomes t u ( 1) = 2 x ( u u ( 1) )+ 2 x u ( 1) + ( 3( α 1 µ )u 2 u x + 3( α 2 µ )u u xx + 3( α 3 µ )u 2 x + ( α 4 µ )u xxx ) (4.6) In the standard analysis, u (1) is assumed to be a functional of the zero-order term, u. The formalism then allows for u (1) the following structure [9,10]: u ( 1) [ u]= au 2 + bqu x + cu x ( q 1 x u) (4.7)
12 The coefficient c is undetermined, as it multiplies a symmetry, the contribution of which in the homological equation vanishes. The ability to solve Eq. (4.6) for u (1) crucially depends on the structure of the zero-order term, u. Consider, first, the single-front solution of Eq. (2.3). The coefficients a and b can be solved for, and have the values [9,10] a = 1 2α 2( α + α 2α ), b = ( α 1 2α 2 α 3 + 2α 4 ) (4.8) The solution of the normal form remains a single-wave one. The coefficient µ obtains the value ( ) α 1 + α 2 α 3 µ = u m u p ( )+ u 2 2 ( m + u p )α 4 (4.9) u 2 2 m + u m u p + u p As a result, the velocity is updated by the perturbation according to v = u m + u p + ε ( u m u p )α ( 1 + α 2 α 3 )+ u 2 2 { ( m + u p )α 4 } (4.10) If one of the boundary values vanishes, a simpler update is obtained: µ = α 4 (4.11) v = k + α 4 k 2 (4.12) Note that q =? x 1 u, diverges linearly: q[ t,x]= u p k ln 1 + ( ek x + v t + x 0 ) { } u m k ln 1 + e k x + vt + x 0 ( ) { } (4.13) However, the term q u x in Eq. (4.7) is bounded, because u x falls off exponentially fast away from the characteristic line of the front.
13 We now turn to the general case, when the zero-order term, u, is not a single-wave solution. The standard Normal Form analysis then encounters an obstacle to integrability. With U 1 given by Eq. (4.5), we focus on the multiple-wave solutions of Eq. (4.3) a modified version of Eq. (2.6): u( t, x)= M i=1 k i e k i( x + v i t + x i,0 ) M 1 + e k i ( x + v i t + x i, 0 ) i=1 v i = v i, 0 + ε µ k i 2 (4.14) As the solution given in Eq. (4.14) has one vanishing boundary condition, the choice of Eq. (4.11) is adopted. Eq. (4.6) then becomes t u ( 1) = 2 x ( u u ( 1) )+ 2 x u ( 1) + 3( α 1 α 4 )u 2 2 ( u x + 3( α 2 α 4 )u u xx + 3( α 3 α 4 )u x ) (4.15) Inserting Eqs. (4.7) and (4.11) in Eq. (4.15), a and b have to account for three independent contributions in the driving term in Eq. (4.15). As a result, a and b cannot be determined unless [9,10] γ 2α 1 α 2 2α 3 + α 4 = 0 (4.16) As there is no way to determine the coefficients a and b, one has to make a choice. We choose for them the values found in the single-front case, given in Eq. (4.8). With that choice, the terms that remain unaccounted for are the ones that would automatically vanish in the single-wave case. With R 21 defined in Eq. (3.9), Eq. (4.15) is reduced to 0 = γ u 2 2 ( u x + uu xx u x )= γ R 21 [ u] (4.17) If γ? 0, there is no way to account for R 21 by u (1). One is forced to shift it into U 1 : U 1 = α 4 S 3 [ u]+ γ R 21 (4.18)
14 As a result, the Normal Form, Eq. (4.3) becomes u t = S 2 [ u]+ ε α 4 S 3 u ( [ ] + R 21 [ u] ) 1 + O ε 2 ( ) (4.19) As R 21 is not a symmetry, it spoils the integrability of the Normal Form, and the solutions lose the simple structure of those of the unperturbed equation. As a consequence, the properties of the symmetries, S n reviewed at the end of Section 3 may not hold. Concurrently with the loss of asymptotic integrability, when u is a multiple-wave solution, another serious problem is hidden in Eq. (4.7): The term (b q u x ), which is bounded in the single-front case, develops a linearly divergent (secular) behavior along the characteristic lines of the inelastically generated fronts. In the case of a two-wave solution, Eq. (2.9), one has { } (4.20) q( t,x)= ln 1 + e k 1( x + k 1 t + x 1,0 ) k + e 2 ( x + k 2 t + x 2,0 ) Along the characteristic line of the inelastically generated front (see Eq. (2.11)), q u x, diverges linearly, making u (1) unbounded, because leading term in the asymptotic behavior of q(t,x) is: q 0 ( t) q( t,x) x k1 + k 2 k 1 k 2 t (4.21) ( )t ξ k 1 k 2 t + (q 0 vanishes exponentially fast for k 1 k 2 t ). To ensure that the standard analysis generates a bounded first-order approximation, term q u x cannot be included in Eq. (4.7). This leads to the emergence of an additional contribution to the obstacle to integrability: ( α 1 2α 2 α 3 + 2α 4 ) 2R 21 u 2 2 { u x + 2u x } (4.22) Note that the numerical coefficient in Eq. (4.22) is the value of b obtained in the single-front case (Eq. (4.8)). Thus, another option is to require that
15 b = α 1 2α 2 α 3 + 2α 4 = 0 (4.23) If, in addition, one imposes the requirement that no obstacles to integrability emerge (Eq. (4.16)), the class of perturbations for which the standard method generates an asymptotically integrable expansion with bounded higher-order terms is limited even further, to: α 1 = α 3, α 2 = α 4 (4.24) 5. Freedom in the Normal Form Expansion The freedom inherent in the Normal Form expansion is not fully exploited in the standard analysis. In particular, the assumption that the higher-order corrections do not depend explicitly on the independent variables, x and t, but only through their dependence the zero-order solution, u, is not a fundamental requirement of the method. This assumption eventually forces one to include the obstacle to integrability in the Normal Form, (see Eq. (4.19)). Thus, let us allow the first-order correction, u (1), to contain an explicitly t- and x-dependent term: u ( 1) [ u;t,x]= au 2 + bqu x + cu x + w ( 1) ( t,x) (5.1) The terms that are unaccounted for by the differential polynomial part of u (1) can be accounted for by w (1) (t,x), preventing the need to transfer the obstacle to integrability to the Normal Form. 1 With the inclusion of w (1) (t,x) in Eq. (5.1), one has additional freedom in dividing the effect of the perturbation between the Normal Form and the Near Identity Transformation, i.e., between U 1 and u (1). One clearly wishes to identify terms that, if retained in the homological equation, may gener- 1 The problem arises already in the Normal Form analysis of perturbed ODE s, where, customarily, higher-order corrections in the Near Identity Transformation (NIT) are assumed to have no explicit time dependence. This assumption works for systems of autonomous equations with a linear unperturbed part. Inconsistencies may emerge in all other cases, and are resolved by allowing for explicit time dependence in the NIT.
16 ate secular behavior in u (1). To this end, it pays to re-write the homological equation, Eq. (4.4), in terms of independent quantities that are identified as having or not having the capacity to generate secular behavior, rather than in terms of the traditional monomials u 2 u x, u u xx, u 2 x and u xxx,. The symmetry, S 3, generates secular behavior. It will be shown in Section 6, that the obstacle R 21, although not a symmetry, has the potential of generating a secular contribution in u (1) along inelastically generated fronts. The two differential polynomials,? x (u u x ) and? x S 2 [u], will be shown to generate bounded behavior in u (1). Inserting Eq. (5.1) in Eq. (4.4), the latter can be recast in the following form: U 1 + t w ( 1) = 2 x ( uw ( 1) )+ 2 x w 1( ) + µs 3 [ u]+ λ R 21 [ u]+ ρ x ( uu x )+ σ x S 2 u [ ] (5.2) with µ = a + α 1 1α + 1α (5.3) λ = a + b + 3α 3α (5.4) ρ = b α 1 + 2α 2 + α 3 2α 4 (5.5) σ = α 4 µ (5.6) 6. Elimination of obstacle to integrability and secular behavior Of the four differential polynomials in Eq. (5.2), the symmetry, S 3, will generate a secular term in w (1), hence it must be accounted for by U 1 U 1 = µ S 3 [ u] (6.1) The remaining terms are not symmetries, hence it pays not to include them in U 1. The obstacle, R 21, does not emerge when zero-order approximation, u, is a single-wave. However, it does emerge in the case of a general solution for u. Consider the case when u is an M-
17 wave solution, which exhibits (M + 1) semi-infinite fronts. Away from the collision region, the semi-infinite fronts asymptote to single-fronts at an exponential rate (see Section 2). Of these fronts, two have one vanishing boundary value. As R 21 vanishes explicitly for a single-wave case with one vanishing boundary value (see Section 3), in the multiple-wave case, along these two fronts, R 21 is expected to decay to zero at the same exponential rate. The remaining (M 1) fronts all have two non-zero boundary values (see Section 2). As a result, R 21 does not vanish, along these fronts. To be specific, let us focus on the case of the two-wave solution of Eq. (2.9), with the inelastically generated front defined by Eq. (2.11). R 21 asymptotes to R 21 0 [ u] + e.s.t k 1 k 2 u x x k i t x i, 0, ( i = 1, 2) x ( k 1 + k 2 )t ξ (6.2) In Eq. (6.2), e.s.t. stands for small terms that vanish at an exponential rate along the characteristic line of the front as the distance from the origin grows. In the M-wave case, k 1 and k 2 are replaced by k i and k i + 1, respectively, for each of the (M 1) inelastically generated fronts. The obstacle is not a symmetry, i.e., it is not a solution of Eq. (3.1). However, it asymptotes to a symmetry along the inelastically generated fronts. Therefore, in Eq. (5.2), it is expected to generate secular terms in w (1) along these characteristic lines. One way to avoid this, is to choose λ = 0 (6.3) Towards the end of Section 4, it was pointed out that, in the multiple-wave case, the term q u x has a secular behavior. Thus, it must be eliminated from u (1). This requires b = 0 (6.4)
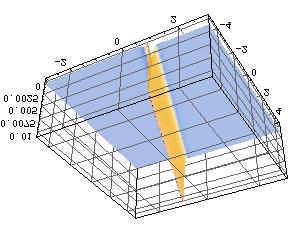
18 Using Eqs. (6.3) and (6.4) in Eqs. (5.3)-(5.6), yields a = 3α 3α (6.5) µ = α 1 + α 2 α 3 (6.6) ρ = α 1 + 2α 2 + α 3 2α 4 (6.7) σ = α 1 α 2 + α 3 + α 4 (6.8) With these values for the coefficients, the Normal Form, Eq. (4.3), becomes u t = S 2 [ u]+ ε( α 1 + α 2 α 3 )S 3 [ u]+ O ε 2 ( ) (6.9) Eq. (6.9) is integrable. Its solutions are the single- and multiple-wave solutions of Eq. (2.1), except that, instead of Eq. (4.12), the velocity of each wave is now updated according to 2 v i = k i + ε ( α 1 + α 2 α 3 )k i (6.10) In addition, Eq. (5.2) is reduced to t w ( 1) = 2 x ( u w ( 1) )+ 2 x w ( 1) + ( α 1 + 2α 2 + α 3 2α 4 ) x ( uu x )+ ( α 1 α 2 + α 3 + α 4 ) x S 2 u [ ] (6.11) A proof that? x (u u x ) and? x S 2 [u] do not generate secular behavior in w (1) in Eq. (6.11) is still missing. Numerically, we have found that they do not generate such behavior. We have checked this for single- and two-wave solutions for various boundary conditions and integration domains. Examples of the numerical solutions of Eq. (6.11) with either driving term are shown in Figs. 2 & 3 7. Comparing results
19 In the case of multiple-wave solutions, in general, the standard method generates an unbounded term in the first-order correction, hence, it makes sense to compare results of Section 6 with those of the standard analysis only in the strict O(ε 0 ) sense, namely, without a perturbation, where they trivially coincide. The exception, is when both Eqs. (4.16) and (4.24) are obeyed, so that Eq. (4.24) holds. Inspection of Eqs. (4.8), (4.11), (6.5)-(6,9), reveals that the two alternatives coincide, because a, b and µ obtain the same values in both, and Eq. (4.24) implies ρ = σ = 0. That is, the coefficients of the terms that need to be computed numerically in the alternative of Section 6 vanish. The only case, in which a meaningful comparison can be made, is that of a single-wave zero-order approximation. Both the standard analysis and our alternative generate a valid firstorder term, u (1), for Eq. (4.2). Consider, therefore, the single-wave case with one vanishing boundary value. The zero-order approximation is given by the M = 1 version of Eq. (4.6). The velocity update in the standard analysis is also given by Eq. (4.6), while the alternative of Section 6 is updated according to Eq. (6.10). The standard analysis first-order term, u (1), is given by Eqs. (4.7) and (4.8). In our alternative, it is given by Eqs. (5.1), (6.5)-(6.8) and (6.11). (The latter is solved numerically). To compare the two solutions, we have to impose boundary values on the solution of Eq. (4.1): w( t, x) 0, x K > 0, x + (7.1) The limits of the approximate solution for large x are: u + ε u ( 1) 0 x k + ε ak 2 x + (7.2) from Eqs. (7.1) and (7.2), one obtains k = K ε a K 2 + O( ε 2 ) (7.3)
20 As a result, in terms of the boundary value, the updated velocity is given by v = k + ε µ k 2 + O( ε 2 )= K + ε ( µ a)k 2 + O( ε 2 ) (7.4) Here µ is the coefficient of S 3 in the Normal Form, Eq. (4.3): µ = α 4 Standard analysis α 1 + α 2 α 3 Section 6 (7.5) The coefficient, a, is given by ( ) Standard analysis a = 1 2α 2 1 α 2 + α 3 2α 4 3 α 2 2 3α 2 3 Section 6 (7.6) With Eqs. (7.5) and (7.6), the velocity updates coincide: v = K + ε ( α 1 1 α + 1 α )K 2 + O( ε 2 ) (7.7) It is easy to show that, the result of Eq. (7.7) for the velocity update is invariant to the (mutually dependent) choices of a and µ. Having imposed the boundary conditions, we compare the zero-order approximations of the two alternatives. Fig. 4 shows that, as expected, they differ by an O(ε a k 2 ) term. Thus, both alternatives generate equally valid zero-order approximates. Fig 5 shows a comparison between the approximate solutions computed through O(ε). We see that where the solutions vary slowly, the difference if of O(ε 2 a 2 k 4 ), whereas along the characteristic line of the front the error is still O(ε k 2 ). This is not surprising, as, to guarantee a uniformly valid O(ε 2 a 2 k 4 ) error, one must solve the Normal Form, Eq. (4.3), through second order, which we have not done.
21 8. Asymptotic behavior along semi-infinite fronts in multiple-wave case The choice that converted Eq. (5.2) into Eq. (6.11) has the advantage of rigorously eliminating the obstacle to integrability and the unbounded term in u (1) of Eq. (4.2). However, it requires that a non-negligible contribution to u (1) is computed numerically. In this Section, we offer another alternative, in which the numerically computed corrections become exponentially small as the distance from the collision region of the fronts grows. This new analysis is confined to the behavior of the solution away from the collision region. The property of the zero-order solution that comes to our aid is the observation made in Section 2, that, away from that region, the zero-order solution asymptotes into well-separated single fronts. Returning to Eqs. (5.1), we note again that, in the multiple-wave case, the term q u x is unbounded along the characteristic lines of each of the (M 1) inelastically generated fronts. To be specific, consider the two-wave case. To avoid the unbounded nature of q u x, we re-write Eq. (5.1) as u ( 1) [ u;t,x]= au 2 + b( q q 0 )u x + cu x + w( t,x) (8.1) In Eq. (8.1), q 0 is the value of q(t,x) along the characteristic line of the inelastically generated front (see Eq. (4.21)). The term (q q 0 ) u x is bounded, because the leading linear component in q has been eliminated. By re-writing Eq. (5.1) in the form of Eq. (8.1), one more term is added to Eq. (4.4), which in the notation used in Eq. (5.2) now becomes U 1 + t w = 2 x ( u w)+ 2 x w + µs 3 [ u]+ ν R 21 [ u]+ b dq 0 dt u + ρ x x ( u u x )+ σ x S 2 u [ ] (8.2) The last two terms in Eq. (8.2) generate in u (1) finite contributions that persist asymptotically along the inelastically generated fronts (see Section 7) and can be only computed numerically. To eliminate such contributions, we now require ρ = σ = 0. Using Eqs. (5.3)-(5.6), the coefficients µ
22 and ν recover their values in the standard analysis, (µ = α 4, ν = γ = 2α 1 α 2 2α 3 + α 4 ) and a and b obtain their values in the single-wave case, given in Eq. (4.8). Eq. (8.2) is reduced to U 1 + t w = 2 x ( u w)+ 2 x w + µs 3 [ u]+ ν R 21 [ u]+ b dq 0 dt u (8.3) x Provided the Normal Form is constructed from symmetries only, away from the collision region, the solution of the zero-order term asymptotes into the three well-separated single fronts. Two of them are single fronts with one vanishing boundary value, the parameters of which are not affected by the presence of the other wave. Each evolves along the characteristic line of one of the waves (x k t t x i,0 ). The last two terms in Eq. (8.3) vanish exponentially fast along these two fronts. First, as noted in Section 3, R 21 vanishes explicitly in the case of a pure single-front solution with one vanishing boundary condition. Hence, it is expected to vanish exponentially along a branch that asymptotes to such a front. As for q 0, by its definition, it vanishes exponentially fast along these two fronts. As a result, along these two fronts, the Normal Form, Eq. (4.3), becomes u t = S 2 [ u]+ εα 4 S 3 [ u]+ O ε 2 ( ) (8.4) and Eq. (8.3) is reduced to t w = 2 x ( u w)+ 2 x w + e.s.t (8.5) Thus, away from the collision region, in triangular wedges in the x-t plane, these two fronts are analyzed just as in the single-front case, with exponentially small numerical corrections. The inelastically generated semi-infinite front asymptotes to a single-wave front with both boundary values non-vanishing, the structure of which is given in Eq. (2.3), with u m = k 1 and u p = k 2. The effect of the perturbation on such a front is given by Eq. (4.10). The only change in the zeroorder solution is that its velocity is updated from the unperturbed value into
23 v = k 1 + k 2 + ε k 1 k 2 ( )( α 1 + α 2 α 3 )+ k 2 2 { ( 1 + k 2 )α 4 } (8.6) In the following, we show that Eq. (8.6) is, indeed, obtained. Both last terms in Eq. (8.3) become proportional to the symmetry S 1 = u x along the characteristic line of the inelastically generated front of Eq. (2.12). For R 21, this is shown in Eq. (6.2). In the last term, dq 0 /dt asymptotes to a constant, -k 1 k 2, hence, dq 0 dt u x k 1 k 2 u x + e.s.t. (8.7) k 1 k 2 t As a result, Eq. (8.3) becomes U 1 + t w = 2 x ( u w)+ 2 x w + α 4 S 3 + k 1 k 2 ( α 1 + α 2 α 3 α 4 )u x + e.s.t. (8.8) To avoid secular terms, one shifts the symmetry part to the Normal Form, which, becomes u t = S 2 [ u]+ ε( α 4 S 3 + k 1 k 2 ( α 1 + α 2 α 3 α 4 )u x )+ O ε 2 ( ) (8.9) leading to the solution of Eq. (2.3) with u m = k 1 and u p = k 2, and a velocity updated as in Eq. (8.6). Eq. (8.8) is reduced to one that generates an exponentially small numerical correction to u (1) : t w = 2 x ( u w)+ 2 x w + e.s.t. (8.10) The extension to solutions with M = 2 waves is straightforward. The two elastically generated fronts are analyzed in the same manner as they are analyzed in the two-wave case. The (M 1) inelastically generated fronts are analyzed in the same manner as in the example discussed above, with k 1 and k 2 replaced by k i and k i + 1, 1 < i < M 1 for each front. 9. Concluding comments
24 In this paper, we have shown how the freedom in the perturbative expansion can be exploited in the case of the perturbed Burgers equation to shift the loss of asymptotic integrability from the Normal Form to the higher order terms in the Near Identity Transformation, and to avoid the occurrence of unbounded terms in higher-orders in the expansion. The price paid is that part of the contribution to the expansion of the solution has to be computed numerically. The gain is that the Normal Form remains asymptotically integrable, so that the zero-order solution retains the simple nature of the solution of the unperturbed equation. Identifying the role played by inelastically generated fronts in the emergence of both unbounded terms and of obstacles to integrability was the key to overcoming both deficiencies of the standard analysis. Obstacles to integrability are also encountered in the standard analysis of other perturbed evolution equations, see, e.g., [7,8,11,12], where the perturbed KdV and NLS have been studied. The unperturbed equation of these systems has soliton solutions. The latter are localized, unlike the fronts of the Burgers equation. As a result, although the formalism allows terms of the type of qu x, they are bounded. Moreover, the solutions of the KdV and NLS satisfy conservation laws that do not have counterparts in the case of the Burgers equation. As a result, the solitons in multisoliton solutions of the unperturbed equations, and of the Normal Form interact inelastically only in a small domain around the origin in the x-t plane (the interaction region), where the solitons lose their individual identity. Away from that region, the solitons regain their original structure (except for a possible phase shift). As inelastic effects do not extend beyond the bounded interaction region, the freedom in the Normal Form expansion can be exploited so as to confine the effect of the obstacles to integrability to the interaction region, guaranteeing that no superfluous unbounded terms emerge. WE have studied the case of the perturbed KdV equation. Some of the results are published in [19, 20].
25 REFERENCES 1. Burgers, J. M., The nonlinear Diffusion equation (Reiedl, Dordtrecht, 1974). 2. Karpman, V. I, Non-Linear Waves in Dispersive Media (Pergamon, Oxford, 1975). 3. Kerner, B. S. Klenov, S. L. and Konhäuser, P., Phys. Rev. E.,56, 4200 (1997). 4. Poincaré, H., New Methods of Celestial Mechanics (Am. Inst. of Physics, 1993). 5. Birkhoff, G.D., Dynamical Systems (Am. Math. Society, Providence, 1996). 6. Arnold, V.I., Geometrical Methods in the Theory of Ordinary Differential Equations (Springer-Verlag, New York, 1988). 7. Kodama, Y., Normal Form and Solitons, pp in Topics in Soliton Theory and Exactly Solvable Nonlinear Equation, ed. by M.J. Ablowitz et al. (World Scientific, Singapore, 1987). 8. Hiraoka, Y. & Kodama, Y., Normal Form and Solitons, Lecture notes, Euro Summer School 2001, The Isaac Newton Institute, Cambridge, August (2002). 9. Fokas, T. & Luo, L., Contemp. Math, 200, 85 (1996). 10. Kraenkel, R. A., Pereira, J. G. & de Rey Neto, E. C., Phys. Rev. E58, 2526 (1998). 11. Calogero, F., Why Are Certain Nonlinear PDE s both widely applicable and integrable? pp. 1-62, in What Is Integrability?, ed. by Zakharov V.E. (Springer, Heidelberg, 1990). 12. Kodama, Y. & Mikhailov, A.V., Obstacles to Asymptotic Integrability, pp in Algebraic Aspects of Integrable Systems, ed. by A.S. Fokas & I.M. Gelfand (Birkhäuser, Boston, 1997). 13. Lax, P. D., Comm. Pure & Appl. Math., 21, 467 (1968). 14. Lax, P. D., Comm. Pure & Appl. Math., (1975).
26 15. Olver, P. J., Applications of Lie Groups to Differential Equations (Springer-Verlag, New York, 1986). 16. Tao Sun, J. Phys. A: Math. Gen., 22, 3737 (1989). 17. Tasso, H., J. Phys. A 29, 7779 (1996). 18. Samokhin, A. V., Acta Appl. Math. 56, 253 (1999). 19. Veksler, A. and Zarmi, Y, WSEAS Trans. Math., 3, 560 (2004). 20. Veksler, A. and Zarmi, Y., Th. & Math. Phys., in press
27 FIGURE CAPTIONS Fig.1 Solutions of Eq. (2.1) a) u(t,x) single wave k =0 5, x 1,0 = 0; b)? x u - single-wave; b) u(t,x) three waves; k 1 = 5, k 2 = 5, k 3 = 2, x 1,0 = 1, x 2,0 = 2, x 3,0 = 3; d)? x u three waves. Note that because x i,0? 0, the fronts collide at diferent points. Fig.2 Solution of Eq. (6.11), single-wave case, k = 5, with driving term: a)? x (u u x ); b)? x S 2 [u]. Fig. 3 Solution of Eq. (6.11), two-wave case, k = 5, with driving term: a)? x (u u x ); b)? x S 2 [u]. Fig. 4 Difference between zero-order approximation of standard analysis (Section4) and alternative of Section 6 for single-front case. ε = 0.001, K = 5 (see Eq. (7.1)), α 1 = 1, α 2 = α 3 = 2, α 4 = 3. Fig. 5 Difference between first-order approximation of standard analysis (Section4) and alternative of Section 6 for single-front case. Paraameters as in Fig. 4.
 t")



28 u(t,x)? x u(t,x) t x t x Fig. 1a Fig. 1b u(t,x)? x u(t,x) t x t x Fig. 1c Fig. 1d


29 Fig. 2a t x t Fig. 2b x Fig. 2a Fig. 2b t x t x Fig. 3a Fig. 3b

30 t x t x Fig. 4 Fig. 5
Freedom in the Expansion and Obstacles to Integrability in Multiple-Soliton Solutions of the Perturbed KdV Equation
 Freedom in the Expansion and Obstacles to Integrability in Multiple-Soliton Solutions of the Perturbed KdV Equation Alex Veksler 1 and Yair Zarmi 1, Ben-Gurion University of the Negev, Israel 1 Department
Freedom in the Expansion and Obstacles to Integrability in Multiple-Soliton Solutions of the Perturbed KdV Equation Alex Veksler 1 and Yair Zarmi 1, Ben-Gurion University of the Negev, Israel 1 Department
The Perturbed NLS Equation and Asymptotic Integrability
 The Perturbed NLS Equation and Asymptotic Integrability Yair Zarmi 1,2 Ben-Gurion University of the Negev, Israel 1 Department of Energy & Environmental Physics Jacob Blaustein Institutes for Desert Research,
The Perturbed NLS Equation and Asymptotic Integrability Yair Zarmi 1,2 Ben-Gurion University of the Negev, Israel 1 Department of Energy & Environmental Physics Jacob Blaustein Institutes for Desert Research,
Yair Zarmi Physics Department & Jacob Blaustein Institutes for Desert Research Ben-Gurion University of the Negev Midreshet Ben-Gurion, Israel
 PERTURBED NONLINEAR EVOLUTION EQUATIONS AND ASYMPTOTIC INTEGRABILITY Yair Zarmi Physics Department & Jacob Blaustein Institutes for Desert Research Ben-Gurion University of the Negev Midreshet Ben-Gurion,
PERTURBED NONLINEAR EVOLUTION EQUATIONS AND ASYMPTOTIC INTEGRABILITY Yair Zarmi Physics Department & Jacob Blaustein Institutes for Desert Research Ben-Gurion University of the Negev Midreshet Ben-Gurion,
LIMITATIONS OF THE METHOD OF MULTIPLE-TIME-SCALES
 LIMITATIONS OF THE METHOD OF MULTIPLE-TIME-SCALES Peter B. Kahn Department of Physics and Astronomy State University of New York Stony Brook, NY 794 and Yair Zarmi Department for Energy & Environmental
LIMITATIONS OF THE METHOD OF MULTIPLE-TIME-SCALES Peter B. Kahn Department of Physics and Astronomy State University of New York Stony Brook, NY 794 and Yair Zarmi Department for Energy & Environmental
MACSYMA PROGRAM FOR THE PAINLEVÉ TEST FOR NONLINEAR ORDINARY AND PARTIAL DIFFERENTIAL EQUATIONS
 . MACSYMA PROGRAM FOR THE PAINLEVÉ TEST FOR NONLINEAR ORDINARY AND PARTIAL DIFFERENTIAL EQUATIONS Willy Hereman Mathematics Department and Center for the Mathematical Sciences University of Wisconsin at
. MACSYMA PROGRAM FOR THE PAINLEVÉ TEST FOR NONLINEAR ORDINARY AND PARTIAL DIFFERENTIAL EQUATIONS Willy Hereman Mathematics Department and Center for the Mathematical Sciences University of Wisconsin at
Application of the perturbation iteration method to boundary layer type problems
 DOI 10.1186/s40064-016-1859-4 RESEARCH Open Access Application of the perturbation iteration method to boundary layer type problems Mehmet Pakdemirli * *Correspondence: mpak@cbu.edu.tr Applied Mathematics
DOI 10.1186/s40064-016-1859-4 RESEARCH Open Access Application of the perturbation iteration method to boundary layer type problems Mehmet Pakdemirli * *Correspondence: mpak@cbu.edu.tr Applied Mathematics
arxiv:patt-sol/ v1 25 Sep 1995
 Reductive Perturbation Method, Multiple Time Solutions and the KdV Hierarchy R. A. Kraenkel 1, M. A. Manna 2, J. C. Montero 1, J. G. Pereira 1 1 Instituto de Física Teórica Universidade Estadual Paulista
Reductive Perturbation Method, Multiple Time Solutions and the KdV Hierarchy R. A. Kraenkel 1, M. A. Manna 2, J. C. Montero 1, J. G. Pereira 1 1 Instituto de Física Teórica Universidade Estadual Paulista
A new integrable system: The interacting soliton of the BO
 Phys. Lett., A 204, p.336-342, 1995 A new integrable system: The interacting soliton of the BO Benno Fuchssteiner and Thorsten Schulze Automath Institute University of Paderborn Paderborn & Germany Abstract
Phys. Lett., A 204, p.336-342, 1995 A new integrable system: The interacting soliton of the BO Benno Fuchssteiner and Thorsten Schulze Automath Institute University of Paderborn Paderborn & Germany Abstract
arxiv:nlin/ v1 [nlin.si] 25 Sep 2006
![arxiv:nlin/ v1 [nlin.si] 25 Sep 2006](/thumbs/95/124323360.jpg "arxiv:nlin/ v1 [nlin.si] 25 Sep 2006") Remarks on the conserved densities of the Camassa-Holm equation Amitava Choudhuri 1, B. Talukdar 1a and S. Ghosh 1 Department of Physics, Visva-Bharati University, Santiniketan 73135, India Patha Bhavana,
Remarks on the conserved densities of the Camassa-Holm equation Amitava Choudhuri 1, B. Talukdar 1a and S. Ghosh 1 Department of Physics, Visva-Bharati University, Santiniketan 73135, India Patha Bhavana,
Symmetry Reductions of (2+1) dimensional Equal Width. Wave Equation
 dimensional Equal Width. Wave Equation") Authors: Symmetry Reductions of (2+1) dimensional Equal Width 1. Dr. S. Padmasekaran Wave Equation Asst. Professor, Department of Mathematics Periyar University, Salem 2. M.G. RANI Periyar University,
Authors: Symmetry Reductions of (2+1) dimensional Equal Width 1. Dr. S. Padmasekaran Wave Equation Asst. Professor, Department of Mathematics Periyar University, Salem 2. M.G. RANI Periyar University,
NUMERICAL SOLITARY WAVE INTERACTION: THE ORDER OF THE INELASTIC EFFECT
 ANZIAM J. 44(2002), 95 102 NUMERICAL SOLITARY WAVE INTERACTION: THE ORDER OF THE INELASTIC EFFECT T. R. MARCHANT 1 (Received 4 April, 2000) Abstract Solitary wave interaction is examined using an extended
ANZIAM J. 44(2002), 95 102 NUMERICAL SOLITARY WAVE INTERACTION: THE ORDER OF THE INELASTIC EFFECT T. R. MARCHANT 1 (Received 4 April, 2000) Abstract Solitary wave interaction is examined using an extended
Some Collision solutions of the rectilinear periodically forced Kepler problem
 Advanced Nonlinear Studies 1 (2001), xxx xxx Some Collision solutions of the rectilinear periodically forced Kepler problem Lei Zhao Johann Bernoulli Institute for Mathematics and Computer Science University
Advanced Nonlinear Studies 1 (2001), xxx xxx Some Collision solutions of the rectilinear periodically forced Kepler problem Lei Zhao Johann Bernoulli Institute for Mathematics and Computer Science University
Computers and Mathematics with Applications
 Computers and Mathematics with Applications 60 (00) 3088 3097 Contents lists available at ScienceDirect Computers and Mathematics with Applications journal homepage: www.elsevier.com/locate/camwa Symmetry
Computers and Mathematics with Applications 60 (00) 3088 3097 Contents lists available at ScienceDirect Computers and Mathematics with Applications journal homepage: www.elsevier.com/locate/camwa Symmetry
Notes for Expansions/Series and Differential Equations
 Notes for Expansions/Series and Differential Equations In the last discussion, we considered perturbation methods for constructing solutions/roots of algebraic equations. Three types of problems were illustrated
Notes for Expansions/Series and Differential Equations In the last discussion, we considered perturbation methods for constructing solutions/roots of algebraic equations. Three types of problems were illustrated
A Note On Solitary Wave Solutions of the Compound Burgers-Korteweg-de Vries Equation
 A Note On Solitary Wave Solutions of the Compound Burgers-Korteweg-de Vries Equation arxiv:math/6768v1 [math.ap] 6 Jul 6 Claire David, Rasika Fernando, and Zhaosheng Feng Université Pierre et Marie Curie-Paris
A Note On Solitary Wave Solutions of the Compound Burgers-Korteweg-de Vries Equation arxiv:math/6768v1 [math.ap] 6 Jul 6 Claire David, Rasika Fernando, and Zhaosheng Feng Université Pierre et Marie Curie-Paris
Generation of undular bores and solitary wave trains in fully nonlinear shallow water theory
 Generation of undular bores and solitary wave trains in fully nonlinear shallow water theory Gennady El 1, Roger Grimshaw 1 and Noel Smyth 2 1 Loughborough University, UK, 2 University of Edinburgh, UK
Generation of undular bores and solitary wave trains in fully nonlinear shallow water theory Gennady El 1, Roger Grimshaw 1 and Noel Smyth 2 1 Loughborough University, UK, 2 University of Edinburgh, UK
Math 575-Lecture 26. KdV equation. Derivation of KdV
 Math 575-Lecture 26 KdV equation We look at the KdV equations and the so-called integrable systems. The KdV equation can be written as u t + 3 2 uu x + 1 6 u xxx = 0. The constants 3/2 and 1/6 are not
Math 575-Lecture 26 KdV equation We look at the KdV equations and the so-called integrable systems. The KdV equation can be written as u t + 3 2 uu x + 1 6 u xxx = 0. The constants 3/2 and 1/6 are not
INTEGRABLE DISCRETIZATION OF COUPLED ABLOWITZ-LADIK EQUATIONS WITH BRANCHED DISPERSION
 v..1r0180507 *018.11.15#5f9cb4 INTEGRABLE DISCRETIZATION OF COUPLED ABLOWITZ-LADIK EQUATIONS WITH BRANCHED DISPERSION CORINA N. BABALIC University of Craiova 13 A.I. Cuza, 00585, Craiova, Romania E-mail:
v..1r0180507 *018.11.15#5f9cb4 INTEGRABLE DISCRETIZATION OF COUPLED ABLOWITZ-LADIK EQUATIONS WITH BRANCHED DISPERSION CORINA N. BABALIC University of Craiova 13 A.I. Cuza, 00585, Craiova, Romania E-mail:
The first three (of infinitely many) conservation laws for (1) are (3) (4) D t (u) =D x (3u 2 + u 2x ); D t (u 2 )=D x (4u 3 u 2 x +2uu 2x ); D t (u 3
 conservation laws for (1) are (3) (4) D t (u) =D x (3u 2 + u 2x ); D t (u 2 )=D x (4u 3 u 2 x +2uu 2x ); D t (u 3") Invariants and Symmetries for Partial Differential Equations and Lattices Λ Ünal Göktaοs y Willy Hereman y Abstract Methods for the computation of invariants and symmetries of nonlinear evolution, wave,
Invariants and Symmetries for Partial Differential Equations and Lattices Λ Ünal Göktaοs y Willy Hereman y Abstract Methods for the computation of invariants and symmetries of nonlinear evolution, wave,
Multisoliton Interaction of Perturbed Manakov System: Effects of External Potentials
 Multisoliton Interaction of Perturbed Manakov System: Effects of External Potentials Michail D. Todorov Faculty of Applied Mathematics and Computer Science Technical University of Sofia, Bulgaria (Work
Multisoliton Interaction of Perturbed Manakov System: Effects of External Potentials Michail D. Todorov Faculty of Applied Mathematics and Computer Science Technical University of Sofia, Bulgaria (Work
Vertex dynamics in multi-soliton solutions of Kadomtsev-Petviashvili II equation
 Vertex dynamics in multi-soliton solutions of Kadomtsev-Petviashvili II equation Yair Zarmi Jacob Blaustein Institutes for Desert Research Ben-Gurion University of the Negev Midreshet Ben-Gurion, 84990
Vertex dynamics in multi-soliton solutions of Kadomtsev-Petviashvili II equation Yair Zarmi Jacob Blaustein Institutes for Desert Research Ben-Gurion University of the Negev Midreshet Ben-Gurion, 84990
Modified Simple Equation Method and its Applications for some Nonlinear Evolution Equations in Mathematical Physics
 Modified Simple Equation Method and its Applications for some Nonlinear Evolution Equations in Mathematical Physics Elsayed M. E. Zayed Mathematics department, Faculty of Science Zagazig University, Zagazig,
Modified Simple Equation Method and its Applications for some Nonlinear Evolution Equations in Mathematical Physics Elsayed M. E. Zayed Mathematics department, Faculty of Science Zagazig University, Zagazig,
Linearization of Mirror Systems
 Journal of Nonlinear Mathematical Physics 00, Volume 9, Supplement 1, 34 4 Proceedings: Hong Kong Linearization of Mirror Systems Tat Leung YEE Department of Mathematics, The Hong Kong University of Science
Journal of Nonlinear Mathematical Physics 00, Volume 9, Supplement 1, 34 4 Proceedings: Hong Kong Linearization of Mirror Systems Tat Leung YEE Department of Mathematics, The Hong Kong University of Science
CONTROL SYSTEMS, ROBOTICS AND AUTOMATION Vol. XI Stochastic Stability - H.J. Kushner
 STOCHASTIC STABILITY H.J. Kushner Applied Mathematics, Brown University, Providence, RI, USA. Keywords: stability, stochastic stability, random perturbations, Markov systems, robustness, perturbed systems,
STOCHASTIC STABILITY H.J. Kushner Applied Mathematics, Brown University, Providence, RI, USA. Keywords: stability, stochastic stability, random perturbations, Markov systems, robustness, perturbed systems,
Symmetry reductions and travelling wave solutions for a new integrable equation
 Symmetry reductions and travelling wave solutions for a new integrable equation MARIA LUZ GANDARIAS University of Cádiz Department of Mathematics PO.BOX 0, 50 Puerto Real, Cádiz SPAIN marialuz.gandarias@uca.es
Symmetry reductions and travelling wave solutions for a new integrable equation MARIA LUZ GANDARIAS University of Cádiz Department of Mathematics PO.BOX 0, 50 Puerto Real, Cádiz SPAIN marialuz.gandarias@uca.es
Ray equations of a weak shock in a hyperbolic system of conservation laws in multi-dimensions
 Proc. Indian Acad. Sci. (Math. Sci.) Vol. 126, No. 2, May 2016, pp. 199 206. c Indian Academy of Sciences Ray equations of a weak in a hyperbolic system of conservation laws in multi-dimensions PHOOLAN
Proc. Indian Acad. Sci. (Math. Sci.) Vol. 126, No. 2, May 2016, pp. 199 206. c Indian Academy of Sciences Ray equations of a weak in a hyperbolic system of conservation laws in multi-dimensions PHOOLAN
arxiv: v1 [nlin.si] 25 Mar 2009
![arxiv: v1 [nlin.si] 25 Mar 2009](/thumbs/80/82303948.jpg "arxiv: v1 [nlin.si] 25 Mar 2009") Linear quadrilateral lattice equations and multidimensional consistency arxiv:0903.4428v1 [nlin.si] 25 Mar 2009 1. Introduction James Atkinson Department of Mathematics and Statistics, La Trobe University,
Linear quadrilateral lattice equations and multidimensional consistency arxiv:0903.4428v1 [nlin.si] 25 Mar 2009 1. Introduction James Atkinson Department of Mathematics and Statistics, La Trobe University,
On universality of critical behaviour in Hamiltonian PDEs
 Riemann - Hilbert Problems, Integrability and Asymptotics Trieste, September 23, 2005 On universality of critical behaviour in Hamiltonian PDEs Boris DUBROVIN SISSA (Trieste) 1 Main subject: Hamiltonian
Riemann - Hilbert Problems, Integrability and Asymptotics Trieste, September 23, 2005 On universality of critical behaviour in Hamiltonian PDEs Boris DUBROVIN SISSA (Trieste) 1 Main subject: Hamiltonian
HIGH FRICTION LIMIT OF THE KRAMERS EQUATION : THE MULTIPLE TIME SCALE APPROACH. Lydéric Bocquet
 HIGH FRICTION LIMIT OF THE KRAMERS EQUATION : THE MULTIPLE TIME SCALE APPROACH Lydéric Bocquet arxiv:cond-mat/9605186v1 30 May 1996 Laboratoire de Physique, Ecole Normale Supérieure de Lyon (URA CNRS 1325),
HIGH FRICTION LIMIT OF THE KRAMERS EQUATION : THE MULTIPLE TIME SCALE APPROACH Lydéric Bocquet arxiv:cond-mat/9605186v1 30 May 1996 Laboratoire de Physique, Ecole Normale Supérieure de Lyon (URA CNRS 1325),
Breaking soliton equations and negative-order breaking soliton equations of typical and higher orders
 Pramana J. Phys. (2016) 87: 68 DOI 10.1007/s12043-016-1273-z c Indian Academy of Sciences Breaking soliton equations and negative-order breaking soliton equations of typical and higher orders ABDUL-MAJID
Pramana J. Phys. (2016) 87: 68 DOI 10.1007/s12043-016-1273-z c Indian Academy of Sciences Breaking soliton equations and negative-order breaking soliton equations of typical and higher orders ABDUL-MAJID
A MULTI-COMPONENT LAX INTEGRABLE HIERARCHY WITH HAMILTONIAN STRUCTURE
 Pacific Journal of Applied Mathematics Volume 1, Number 2, pp. 69 75 ISSN PJAM c 2008 Nova Science Publishers, Inc. A MULTI-COMPONENT LAX INTEGRABLE HIERARCHY WITH HAMILTONIAN STRUCTURE Wen-Xiu Ma Department
Pacific Journal of Applied Mathematics Volume 1, Number 2, pp. 69 75 ISSN PJAM c 2008 Nova Science Publishers, Inc. A MULTI-COMPONENT LAX INTEGRABLE HIERARCHY WITH HAMILTONIAN STRUCTURE Wen-Xiu Ma Department
A Search for the Simplest Chaotic Partial Differential Equation
 A Search for the Simplest Chaotic Partial Differential Equation C. Brummitt University of Wisconsin-Madison, Department of Physics cbrummitt@wisc.edu J. C. Sprott University of Wisconsin-Madison, Department
A Search for the Simplest Chaotic Partial Differential Equation C. Brummitt University of Wisconsin-Madison, Department of Physics cbrummitt@wisc.edu J. C. Sprott University of Wisconsin-Madison, Department
Degenerate Perturbation Theory. 1 General framework and strategy
 Physics G6037 Professor Christ 12/22/2015 Degenerate Perturbation Theory The treatment of degenerate perturbation theory presented in class is written out here in detail. The appendix presents the underlying
Physics G6037 Professor Christ 12/22/2015 Degenerate Perturbation Theory The treatment of degenerate perturbation theory presented in class is written out here in detail. The appendix presents the underlying
New approach for tanh and extended-tanh methods with applications on Hirota-Satsuma equations
 Volume 28, N. 1, pp. 1 14, 2009 Copyright 2009 SBMAC ISSN 0101-8205 www.scielo.br/cam New approach for tanh and extended-tanh methods with applications on Hirota-Satsuma equations HASSAN A. ZEDAN Mathematics
Volume 28, N. 1, pp. 1 14, 2009 Copyright 2009 SBMAC ISSN 0101-8205 www.scielo.br/cam New approach for tanh and extended-tanh methods with applications on Hirota-Satsuma equations HASSAN A. ZEDAN Mathematics
A solitary-wave solution to a perturbed KdV equation
 University of Warwick institutional repository: http://go.warwick.ac.uk/wrap This paper is made available online in accordance with publisher policies. Please scroll down to view the document itself. Please
University of Warwick institutional repository: http://go.warwick.ac.uk/wrap This paper is made available online in accordance with publisher policies. Please scroll down to view the document itself. Please
Exact Solutions of The Regularized Long-Wave Equation: The Hirota Direct Method Approach to Partially Integrable Equations
 Thai Journal of Mathematics Volume 5(2007) Number 2 : 273 279 www.math.science.cmu.ac.th/thaijournal Exact Solutions of The Regularized Long-Wave Equation: The Hirota Direct Method Approach to Partially
Thai Journal of Mathematics Volume 5(2007) Number 2 : 273 279 www.math.science.cmu.ac.th/thaijournal Exact Solutions of The Regularized Long-Wave Equation: The Hirota Direct Method Approach to Partially
A Two-dimensional Mapping with a Strange Attractor
 Commun. math. Phys. 50, 69 77 (1976) Communications in Mathematical Physics by Springer-Verlag 1976 A Two-dimensional Mapping with a Strange Attractor M. Henon Observatoire de Nice, F-06300 Nice, France
Commun. math. Phys. 50, 69 77 (1976) Communications in Mathematical Physics by Springer-Verlag 1976 A Two-dimensional Mapping with a Strange Attractor M. Henon Observatoire de Nice, F-06300 Nice, France
B.7 Lie Groups and Differential Equations
 96 B.7. LIE GROUPS AND DIFFERENTIAL EQUATIONS B.7 Lie Groups and Differential Equations Peter J. Olver in Minneapolis, MN (U.S.A.) mailto:olver@ima.umn.edu The applications of Lie groups to solve differential
96 B.7. LIE GROUPS AND DIFFERENTIAL EQUATIONS B.7 Lie Groups and Differential Equations Peter J. Olver in Minneapolis, MN (U.S.A.) mailto:olver@ima.umn.edu The applications of Lie groups to solve differential
arxiv:nlin/ v2 [nlin.si] 9 Oct 2002
![arxiv:nlin/ v2 [nlin.si] 9 Oct 2002](/thumbs/74/71439972.jpg "arxiv:nlin/ v2 [nlin.si] 9 Oct 2002") Journal of Nonlinear Mathematical Physics Volume 9, Number 1 2002), 21 25 Letter On Integrability of Differential Constraints Arising from the Singularity Analysis S Yu SAKOVICH Institute of Physics, National
Journal of Nonlinear Mathematical Physics Volume 9, Number 1 2002), 21 25 Letter On Integrability of Differential Constraints Arising from the Singularity Analysis S Yu SAKOVICH Institute of Physics, National
LIE TRANSFORM CONSTRUCTION OF EXPONENTIAL NORMAL FORM OBSERVERS. Suba Thomas Harry G. Kwatny Bor-Chin Chang
 LIE TRANSFORM CONSTRUCTION OF EXPONENTIAL NORMAL FORM OBSERVERS Suba Thomas Harry G Kwatny Bor-Chin Chang Department of Mechanical Engineering and Mechanics, Drexel University, Philadelphia, PA 1914, USA
LIE TRANSFORM CONSTRUCTION OF EXPONENTIAL NORMAL FORM OBSERVERS Suba Thomas Harry G Kwatny Bor-Chin Chang Department of Mechanical Engineering and Mechanics, Drexel University, Philadelphia, PA 1914, USA
Travelling wave solutions for a CBS equation in dimensions
 AMERICAN CONFERENCE ON APPLIED MATHEMATICS (MATH '8), Harvard, Massachusetts, USA, March -6, 8 Travelling wave solutions for a CBS equation in + dimensions MARIA LUZ GANDARIAS University of Cádiz Department
AMERICAN CONFERENCE ON APPLIED MATHEMATICS (MATH '8), Harvard, Massachusetts, USA, March -6, 8 Travelling wave solutions for a CBS equation in + dimensions MARIA LUZ GANDARIAS University of Cádiz Department
Dispersion relations, stability and linearization
 Dispersion relations, stability and linearization 1 Dispersion relations Suppose that u(x, t) is a function with domain { < x 0}, and it satisfies a linear, constant coefficient partial differential
Dispersion relations, stability and linearization 1 Dispersion relations Suppose that u(x, t) is a function with domain { < x 0}, and it satisfies a linear, constant coefficient partial differential
Travelling waves. Chapter 8. 1 Introduction
 Chapter 8 Travelling waves 1 Introduction One of the cornerstones in the study of both linear and nonlinear PDEs is the wave propagation. A wave is a recognizable signal which is transferred from one part
Chapter 8 Travelling waves 1 Introduction One of the cornerstones in the study of both linear and nonlinear PDEs is the wave propagation. A wave is a recognizable signal which is transferred from one part
In Arnold s Mathematical Methods of Classical Mechanics (1), it
, it") Near strongly resonant periodic orbits in a Hamiltonian system Vassili Gelfreich* Mathematics Institute, University of Warwick, Coventry CV4 7AL, United Kingdom Communicated by John N. Mather, Princeton
Near strongly resonant periodic orbits in a Hamiltonian system Vassili Gelfreich* Mathematics Institute, University of Warwick, Coventry CV4 7AL, United Kingdom Communicated by John N. Mather, Princeton
QUANTUM BOUND STATES WITH ZERO BINDING ENERGY
 ψ hepth@xxx/940554 LA-UR-94-374 QUANTUM BOUND STATES WITH ZERO BINDING ENERGY Jamil Daboul Physics Department, Ben Gurion University of the Negev Beer Sheva, Israel and Michael Martin Nieto 2 Theoretical
ψ hepth@xxx/940554 LA-UR-94-374 QUANTUM BOUND STATES WITH ZERO BINDING ENERGY Jamil Daboul Physics Department, Ben Gurion University of the Negev Beer Sheva, Israel and Michael Martin Nieto 2 Theoretical
Lecture 6: Introduction to Partial Differential Equations
 Introductory lecture notes on Partial Differential Equations - c Anthony Peirce. Not to be copied, used, or revised without explicit written permission from the copyright owner. 1 Lecture 6: Introduction
Introductory lecture notes on Partial Differential Equations - c Anthony Peirce. Not to be copied, used, or revised without explicit written permission from the copyright owner. 1 Lecture 6: Introduction
2 Matched asymptotic expansions.
 2 Matched asymptotic expansions. In this section we develop a technique used in solving problems which exhibit boundarylayer phenomena. The technique is known as method of matched asymptotic expansions
2 Matched asymptotic expansions. In this section we develop a technique used in solving problems which exhibit boundarylayer phenomena. The technique is known as method of matched asymptotic expansions
ANALYSIS OF A NONLINEAR SURFACE WIND WAVES MODEL VIA LIE GROUP METHOD
 Electronic Journal of Differential Equations, Vol. 206 (206), No. 228, pp. 8. ISSN: 072-669. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu ANALYSIS OF A NONLINEAR SURFACE WIND WAVES MODEL
Electronic Journal of Differential Equations, Vol. 206 (206), No. 228, pp. 8. ISSN: 072-669. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu ANALYSIS OF A NONLINEAR SURFACE WIND WAVES MODEL
Computational Solutions for the Korteweg devries Equation in Warm Plasma
 COMPUTATIONAL METHODS IN SCIENCE AND TECHNOLOGY 16(1, 13-18 (1 Computational Solutions for the Korteweg devries Equation in Warm Plasma E.K. El-Shewy*, H.G. Abdelwahed, H.M. Abd-El-Hamid. Theoretical Physics
COMPUTATIONAL METHODS IN SCIENCE AND TECHNOLOGY 16(1, 13-18 (1 Computational Solutions for the Korteweg devries Equation in Warm Plasma E.K. El-Shewy*, H.G. Abdelwahed, H.M. Abd-El-Hamid. Theoretical Physics
MA22S3 Summary Sheet: Ordinary Differential Equations
 MA22S3 Summary Sheet: Ordinary Differential Equations December 14, 2017 Kreyszig s textbook is a suitable guide for this part of the module. Contents 1 Terminology 1 2 First order separable 2 2.1 Separable
MA22S3 Summary Sheet: Ordinary Differential Equations December 14, 2017 Kreyszig s textbook is a suitable guide for this part of the module. Contents 1 Terminology 1 2 First order separable 2 2.1 Separable
A Very Brief Introduction to Conservation Laws
 A Very Brief Introduction to Wen Shen Department of Mathematics, Penn State University Summer REU Tutorial, May 2013 Summer REU Tutorial, May 2013 1 / The derivation of conservation laws A conservation
A Very Brief Introduction to Wen Shen Department of Mathematics, Penn State University Summer REU Tutorial, May 2013 Summer REU Tutorial, May 2013 1 / The derivation of conservation laws A conservation
A matching pursuit technique for computing the simplest normal forms of vector fields
 Journal of Symbolic Computation 35 (2003) 59 65 www.elsevier.com/locate/jsc A matching pursuit technique for computing the simplest normal forms of vector fields Pei Yu, Yuan Yuan Department of Applied
Journal of Symbolic Computation 35 (2003) 59 65 www.elsevier.com/locate/jsc A matching pursuit technique for computing the simplest normal forms of vector fields Pei Yu, Yuan Yuan Department of Applied
Exact Solutions for a Fifth-Order Two-Mode KdV Equation with Variable Coefficients
 Contemporary Engineering Sciences, Vol. 11, 2018, no. 16, 779-784 HIKARI Ltd, www.m-hikari.com https://doi.org/10.12988/ces.2018.8262 Exact Solutions for a Fifth-Order Two-Mode KdV Equation with Variable
Contemporary Engineering Sciences, Vol. 11, 2018, no. 16, 779-784 HIKARI Ltd, www.m-hikari.com https://doi.org/10.12988/ces.2018.8262 Exact Solutions for a Fifth-Order Two-Mode KdV Equation with Variable
Lecture 12: Transcritical flow over an obstacle
 Lecture 12: Transcritical flow over an obstacle Lecturer: Roger Grimshaw. Write-up: Erinna Chen June 22, 2009 1 Introduction The flow of a fluid over an obstacle is a classical and fundamental problem
Lecture 12: Transcritical flow over an obstacle Lecturer: Roger Grimshaw. Write-up: Erinna Chen June 22, 2009 1 Introduction The flow of a fluid over an obstacle is a classical and fundamental problem
Chapter 1 Computer Arithmetic
 Numerical Analysis (Math 9372) 2017-2016 Chapter 1 Computer Arithmetic 1.1 Introduction Numerical analysis is a way to solve mathematical problems by special procedures which use arithmetic operations
Numerical Analysis (Math 9372) 2017-2016 Chapter 1 Computer Arithmetic 1.1 Introduction Numerical analysis is a way to solve mathematical problems by special procedures which use arithmetic operations
The elliptic sinh-gordon equation in the half plane
 Available online at www.tjnsa.com J. Nonlinear Sci. Appl. 8 25), 63 73 Research Article The elliptic sinh-gordon equation in the half plane Guenbo Hwang Department of Mathematics, Daegu University, Gyeongsan
Available online at www.tjnsa.com J. Nonlinear Sci. Appl. 8 25), 63 73 Research Article The elliptic sinh-gordon equation in the half plane Guenbo Hwang Department of Mathematics, Daegu University, Gyeongsan
Soliton and Numerical Solutions of the Burgers Equation and Comparing them
 Int. Journal of Math. Analysis, Vol. 4, 2010, no. 52, 2547-2564 Soliton and Numerical Solutions of the Burgers Equation and Comparing them Esmaeel Hesameddini and Razieh Gholampour Shiraz University of
Int. Journal of Math. Analysis, Vol. 4, 2010, no. 52, 2547-2564 Soliton and Numerical Solutions of the Burgers Equation and Comparing them Esmaeel Hesameddini and Razieh Gholampour Shiraz University of
FORMAL ASYMPTOTIC EXPANSIONS FOR SYMMETRIC ANCIENT OVALS IN MEAN CURVATURE FLOW. Sigurd Angenent
 Manuscript submitted to AIMS Journals Volume X, Number 0X, XX 00X Website: http://aimsciences.org pp. X XX FORMAL ASYMPTOTIC EXPANSIONS FOR SYMMETRIC ANCIENT OVALS IN MEAN CURVATURE FLOW Sigurd Angenent
Manuscript submitted to AIMS Journals Volume X, Number 0X, XX 00X Website: http://aimsciences.org pp. X XX FORMAL ASYMPTOTIC EXPANSIONS FOR SYMMETRIC ANCIENT OVALS IN MEAN CURVATURE FLOW Sigurd Angenent
1 Running and matching of the QED coupling constant
 Quantum Field Theory-II UZH and ETH, FS-6 Assistants: A. Greljo, D. Marzocca, J. Shapiro http://www.physik.uzh.ch/lectures/qft/ Problem Set n. 8 Prof. G. Isidori Due: -5-6 Running and matching of the QED
Quantum Field Theory-II UZH and ETH, FS-6 Assistants: A. Greljo, D. Marzocca, J. Shapiro http://www.physik.uzh.ch/lectures/qft/ Problem Set n. 8 Prof. G. Isidori Due: -5-6 Running and matching of the QED
Hamiltonian partial differential equations and Painlevé transcendents
 The 6th TIMS-OCAMI-WASEDA Joint International Workshop on Integrable Systems and Mathematical Physics March 22-26, 2014 Hamiltonian partial differential equations and Painlevé transcendents Boris DUBROVIN
The 6th TIMS-OCAMI-WASEDA Joint International Workshop on Integrable Systems and Mathematical Physics March 22-26, 2014 Hamiltonian partial differential equations and Painlevé transcendents Boris DUBROVIN
Canonical Forms for BiHamiltonian Systems
 Canonical Forms for BiHamiltonian Systems Peter J. Olver Dedicated to the Memory of Jean-Louis Verdier BiHamiltonian systems were first defined in the fundamental paper of Magri, [5], which deduced the
Canonical Forms for BiHamiltonian Systems Peter J. Olver Dedicated to the Memory of Jean-Louis Verdier BiHamiltonian systems were first defined in the fundamental paper of Magri, [5], which deduced the
2. Examples of Integrable Equations
 Integrable equations A.V.Mikhailov and V.V.Sokolov 1. Introduction 2. Examples of Integrable Equations 3. Examples of Lax pairs 4. Structure of Lax pairs 5. Local Symmetries, conservation laws and the
Integrable equations A.V.Mikhailov and V.V.Sokolov 1. Introduction 2. Examples of Integrable Equations 3. Examples of Lax pairs 4. Structure of Lax pairs 5. Local Symmetries, conservation laws and the
PURE Math Residents Program Gröbner Bases and Applications Week 3 Lectures
 PURE Math Residents Program Gröbner Bases and Applications Week 3 Lectures John B. Little Department of Mathematics and Computer Science College of the Holy Cross June 2012 Overview of this week The research
PURE Math Residents Program Gröbner Bases and Applications Week 3 Lectures John B. Little Department of Mathematics and Computer Science College of the Holy Cross June 2012 Overview of this week The research
= 0. = q i., q i = E
 Summary of the Above Newton s second law: d 2 r dt 2 = Φ( r) Complicated vector arithmetic & coordinate system dependence Lagrangian Formalism: L q i d dt ( L q i ) = 0 n second-order differential equations
Summary of the Above Newton s second law: d 2 r dt 2 = Φ( r) Complicated vector arithmetic & coordinate system dependence Lagrangian Formalism: L q i d dt ( L q i ) = 0 n second-order differential equations
OPTIMAL PERTURBATION OF UNCERTAIN SYSTEMS
 Stochastics and Dynamics, Vol. 2, No. 3 (22 395 42 c World Scientific Publishing Company OPTIMAL PERTURBATION OF UNCERTAIN SYSTEMS Stoch. Dyn. 22.2:395-42. Downloaded from www.worldscientific.com by HARVARD
Stochastics and Dynamics, Vol. 2, No. 3 (22 395 42 c World Scientific Publishing Company OPTIMAL PERTURBATION OF UNCERTAIN SYSTEMS Stoch. Dyn. 22.2:395-42. Downloaded from www.worldscientific.com by HARVARD
Group-invariant solutions of nonlinear elastodynamic problems of plates and shells *
 Group-invariant solutions of nonlinear elastodynamic problems of plates and shells * V. A. Dzhupanov, V. M. Vassilev, P. A. Dzhondzhorov Institute of mechanics, Bulgarian Academy of Sciences, Acad. G.
Group-invariant solutions of nonlinear elastodynamic problems of plates and shells * V. A. Dzhupanov, V. M. Vassilev, P. A. Dzhondzhorov Institute of mechanics, Bulgarian Academy of Sciences, Acad. G.
The Complete Set of Generalized Symmetries for the Calogero Degasperis Ibragimov Shabat Equation
 Proceedings of Institute of Mathematics of NAS of Ukraine 2002, Vol. 43, Part 1, 209 214 The Complete Set of Generalized Symmetries for the Calogero Degasperis Ibragimov Shabat Equation Artur SERGYEYEV
Proceedings of Institute of Mathematics of NAS of Ukraine 2002, Vol. 43, Part 1, 209 214 The Complete Set of Generalized Symmetries for the Calogero Degasperis Ibragimov Shabat Equation Artur SERGYEYEV
Traveling waves and localized structures: An alternative view of nonlinear evolution equations
 Traveling waves and localized structures: An alternative view of nonlinear evolution equations Yair Zarmi Jacob Blaustein Institutes for Desert Research Ben-Gurion University of the Negev Midreshet Ben-Gurion,
Traveling waves and localized structures: An alternative view of nonlinear evolution equations Yair Zarmi Jacob Blaustein Institutes for Desert Research Ben-Gurion University of the Negev Midreshet Ben-Gurion,
Physics 342 Lecture 23. Radial Separation. Lecture 23. Physics 342 Quantum Mechanics I
 Physics 342 Lecture 23 Radial Separation Lecture 23 Physics 342 Quantum Mechanics I Friday, March 26th, 2010 We begin our spherical solutions with the simplest possible case zero potential. Aside from
Physics 342 Lecture 23 Radial Separation Lecture 23 Physics 342 Quantum Mechanics I Friday, March 26th, 2010 We begin our spherical solutions with the simplest possible case zero potential. Aside from
CS 450 Numerical Analysis. Chapter 8: Numerical Integration and Differentiation
 Lecture slides based on the textbook Scientific Computing: An Introductory Survey by Michael T. Heath, copyright c 2018 by the Society for Industrial and Applied Mathematics. http://www.siam.org/books/cl80
Lecture slides based on the textbook Scientific Computing: An Introductory Survey by Michael T. Heath, copyright c 2018 by the Society for Industrial and Applied Mathematics. http://www.siam.org/books/cl80
Scaling Limits of Waves in Convex Scalar Conservation Laws Under Random Initial Perturbations
 Journal of Statistical Physics, Vol. 122, No. 2, January 2006 ( C 2006 ) DOI: 10.1007/s10955-005-8006-x Scaling Limits of Waves in Convex Scalar Conservation Laws Under Random Initial Perturbations Jan
Journal of Statistical Physics, Vol. 122, No. 2, January 2006 ( C 2006 ) DOI: 10.1007/s10955-005-8006-x Scaling Limits of Waves in Convex Scalar Conservation Laws Under Random Initial Perturbations Jan
Exact Travelling Wave Solutions of the Coupled Klein-Gordon Equation by the Infinite Series Method
 Available at http://pvamu.edu/aam Appl. Appl. Math. ISSN: 93-9466 Vol. 6, Issue (June 0) pp. 3 3 (Previously, Vol. 6, Issue, pp. 964 97) Applications and Applied Mathematics: An International Journal (AAM)
Available at http://pvamu.edu/aam Appl. Appl. Math. ISSN: 93-9466 Vol. 6, Issue (June 0) pp. 3 3 (Previously, Vol. 6, Issue, pp. 964 97) Applications and Applied Mathematics: An International Journal (AAM)
Distributions of statistical mechanics
 CHAPTER II Distributions of statistical mechanics The purpose of Statistical Mechanics is to explain the thermodynamic properties of macroscopic systems starting from underlying microscopic models possibly
CHAPTER II Distributions of statistical mechanics The purpose of Statistical Mechanics is to explain the thermodynamic properties of macroscopic systems starting from underlying microscopic models possibly
8.1 Bifurcations of Equilibria
 1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
Group analysis, nonlinear self-adjointness, conservation laws, and soliton solutions for the mkdv systems
 ISSN 139-5113 Nonlinear Analysis: Modelling Control, 017, Vol., No. 3, 334 346 https://doi.org/10.15388/na.017.3.4 Group analysis, nonlinear self-adjointness, conservation laws, soliton solutions for the
ISSN 139-5113 Nonlinear Analysis: Modelling Control, 017, Vol., No. 3, 334 346 https://doi.org/10.15388/na.017.3.4 Group analysis, nonlinear self-adjointness, conservation laws, soliton solutions for the
Various lecture notes for
 Various lecture notes for 18311. R. R. Rosales (MIT, Math. Dept., 2-337) April 12, 2013 Abstract Notes, both complete and/or incomplete, for MIT s 18.311 (Principles of Applied Mathematics). These notes
Various lecture notes for 18311. R. R. Rosales (MIT, Math. Dept., 2-337) April 12, 2013 Abstract Notes, both complete and/or incomplete, for MIT s 18.311 (Principles of Applied Mathematics). These notes
Modeling Interactions of Soliton Trains. Effects of External Potentials. Part II
 Modeling Interactions of Soliton Trains. Effects of External Potentials. Part II Michail Todorov Department of Applied Mathematics and Computer Science Technical University of Sofia, Bulgaria Work done
Modeling Interactions of Soliton Trains. Effects of External Potentials. Part II Michail Todorov Department of Applied Mathematics and Computer Science Technical University of Sofia, Bulgaria Work done
On quasiperiodic boundary condition problem
 JOURNAL OF MATHEMATICAL PHYSICS 46, 03503 (005) On quasiperiodic boundary condition problem Y. Charles Li a) Department of Mathematics, University of Missouri, Columbia, Missouri 65 (Received 8 April 004;
JOURNAL OF MATHEMATICAL PHYSICS 46, 03503 (005) On quasiperiodic boundary condition problem Y. Charles Li a) Department of Mathematics, University of Missouri, Columbia, Missouri 65 (Received 8 April 004;
On Local Time-Dependent Symmetries of Integrable Evolution Equations
 Proceedings of Institute of Mathematics of NAS of Ukraine 2000, Vol. 30, Part 1, 196 203. On Local Time-Dependent Symmetries of Integrable Evolution Equations A. SERGYEYEV Institute of Mathematics of the
Proceedings of Institute of Mathematics of NAS of Ukraine 2000, Vol. 30, Part 1, 196 203. On Local Time-Dependent Symmetries of Integrable Evolution Equations A. SERGYEYEV Institute of Mathematics of the
Singularities, Algebraic entropy and Integrability of discrete Systems
 Singularities, Algebraic entropy and Integrability of discrete Systems K.M. Tamizhmani Pondicherry University, India. Indo-French Program for Mathematics The Institute of Mathematical Sciences, Chennai-2016
Singularities, Algebraic entropy and Integrability of discrete Systems K.M. Tamizhmani Pondicherry University, India. Indo-French Program for Mathematics The Institute of Mathematical Sciences, Chennai-2016
arxiv: v1 [math-ph] 25 Jul Preliminaries
![arxiv: v1 [math-ph] 25 Jul Preliminaries](/thumbs/91/105268389.jpg "arxiv: v1 [math-ph] 25 Jul Preliminaries") arxiv:1107.4877v1 [math-ph] 25 Jul 2011 Nonlinear self-adjointness and conservation laws Nail H. Ibragimov Department of Mathematics and Science, Blekinge Institute of Technology, 371 79 Karlskrona, Sweden
arxiv:1107.4877v1 [math-ph] 25 Jul 2011 Nonlinear self-adjointness and conservation laws Nail H. Ibragimov Department of Mathematics and Science, Blekinge Institute of Technology, 371 79 Karlskrona, Sweden
CHAPTER III HAAR WAVELET METHOD FOR SOLVING FISHER S EQUATION
 CHAPTER III HAAR WAVELET METHOD FOR SOLVING FISHER S EQUATION A version of this chapter has been published as Haar Wavelet Method for solving Fisher s equation, Appl. Math.Comput.,(ELSEVIER) 211 (2009)
CHAPTER III HAAR WAVELET METHOD FOR SOLVING FISHER S EQUATION A version of this chapter has been published as Haar Wavelet Method for solving Fisher s equation, Appl. Math.Comput.,(ELSEVIER) 211 (2009)
Multisolitonic solutions from a Bäcklund transformation for a parametric coupled Korteweg-de Vries system
 arxiv:407.7743v3 [math-ph] 3 Jan 205 Multisolitonic solutions from a Bäcklund transformation for a parametric coupled Korteweg-de Vries system L. Cortés Vega*, A. Restuccia**, A. Sotomayor* January 5,
arxiv:407.7743v3 [math-ph] 3 Jan 205 Multisolitonic solutions from a Bäcklund transformation for a parametric coupled Korteweg-de Vries system L. Cortés Vega*, A. Restuccia**, A. Sotomayor* January 5,
Exact solutions through symmetry reductions for a new integrable equation
 Exact solutions through symmetry reductions for a new integrable equation MARIA LUZ GANDARIAS University of Cádiz Department of Mathematics PO.BOX, 1151 Puerto Real, Cádiz SPAIN marialuz.gandarias@uca.es
Exact solutions through symmetry reductions for a new integrable equation MARIA LUZ GANDARIAS University of Cádiz Department of Mathematics PO.BOX, 1151 Puerto Real, Cádiz SPAIN marialuz.gandarias@uca.es
Perturbation theory for the defocusing nonlinear Schrödinger equation
 Perturbation theory for the defocusing nonlinear Schrödinger equation Theodoros P. Horikis University of Ioannina In collaboration with: M. J. Ablowitz, S. D. Nixon and D. J. Frantzeskakis Outline What
Perturbation theory for the defocusing nonlinear Schrödinger equation Theodoros P. Horikis University of Ioannina In collaboration with: M. J. Ablowitz, S. D. Nixon and D. J. Frantzeskakis Outline What
Page 404. Lecture 22: Simple Harmonic Oscillator: Energy Basis Date Given: 2008/11/19 Date Revised: 2008/11/19
 Page 404 Lecture : Simple Harmonic Oscillator: Energy Basis Date Given: 008/11/19 Date Revised: 008/11/19 Coordinate Basis Section 6. The One-Dimensional Simple Harmonic Oscillator: Coordinate Basis Page
Page 404 Lecture : Simple Harmonic Oscillator: Energy Basis Date Given: 008/11/19 Date Revised: 008/11/19 Coordinate Basis Section 6. The One-Dimensional Simple Harmonic Oscillator: Coordinate Basis Page
Waves in a Shock Tube
 Waves in a Shock Tube Ivan Christov c February 5, 005 Abstract. This paper discusses linear-wave solutions and simple-wave solutions to the Navier Stokes equations for an inviscid and compressible fluid
Waves in a Shock Tube Ivan Christov c February 5, 005 Abstract. This paper discusses linear-wave solutions and simple-wave solutions to the Navier Stokes equations for an inviscid and compressible fluid
Numerical computation of the finite-genus solutions of the Korteweg-de Vries equation via Riemann Hilbert problems
 Numerical computation of the finite-genus solutions of the Korteweg-de Vries equation via Riemann Hilbert problems Thomas Trogdon 1 and Bernard Deconinck Department of Applied Mathematics University of
Numerical computation of the finite-genus solutions of the Korteweg-de Vries equation via Riemann Hilbert problems Thomas Trogdon 1 and Bernard Deconinck Department of Applied Mathematics University of
On the group velocity property for waveactivity
 On the group velocity property for waveactivity conservation laws Article Published Version Vanneste, J. and Shepherd, T. G. (1998) On the group velocity property for wave activity conservation laws. Journal
On the group velocity property for waveactivity conservation laws Article Published Version Vanneste, J. and Shepherd, T. G. (1998) On the group velocity property for wave activity conservation laws. Journal
ORDINARY DIFFERENTIAL EQUATIONS
 ORDINARY DIFFERENTIAL EQUATIONS GABRIEL NAGY Mathematics Department, Michigan State University, East Lansing, MI, 48824. JANUARY 3, 25 Summary. This is an introduction to ordinary differential equations.
ORDINARY DIFFERENTIAL EQUATIONS GABRIEL NAGY Mathematics Department, Michigan State University, East Lansing, MI, 48824. JANUARY 3, 25 Summary. This is an introduction to ordinary differential equations.
Invariants and Symmetry
 November 007 Terminology Page 1 of 8 Invariants and Symmetry An invariant is some property of an object that does not change even when the object is changed or its description is changed. A semi-invariant
November 007 Terminology Page 1 of 8 Invariants and Symmetry An invariant is some property of an object that does not change even when the object is changed or its description is changed. A semi-invariant
Effects of self-steepening and self-frequency shifting on short-pulse splitting in dispersive nonlinear media
 PHYSICAL REVIEW A VOLUME 57, NUMBER 6 JUNE 1998 Effects of self-steepening and self-frequency shifting on short-pulse splitting in dispersive nonlinear media Marek Trippenbach and Y. B. Band Departments
PHYSICAL REVIEW A VOLUME 57, NUMBER 6 JUNE 1998 Effects of self-steepening and self-frequency shifting on short-pulse splitting in dispersive nonlinear media Marek Trippenbach and Y. B. Band Departments
THE JACOBIAN AND FORMAL GROUP OF A CURVE OF GENUS 2 OVER AN ARBITRARY GROUND FIELD E. V. Flynn, Mathematical Institute, University of Oxford
 THE JACOBIAN AND FORMAL GROUP OF A CURVE OF GENUS 2 OVER AN ARBITRARY GROUND FIELD E. V. Flynn, Mathematical Institute, University of Oxford 0. Introduction The ability to perform practical computations
THE JACOBIAN AND FORMAL GROUP OF A CURVE OF GENUS 2 OVER AN ARBITRARY GROUND FIELD E. V. Flynn, Mathematical Institute, University of Oxford 0. Introduction The ability to perform practical computations
The (G'/G) - Expansion Method for Finding Traveling Wave Solutions of Some Nonlinear Pdes in Mathematical Physics
 - Expansion Method for Finding Traveling Wave Solutions of Some Nonlinear Pdes in Mathematical Physics") Vol.3, Issue., Jan-Feb. 3 pp-369-376 ISSN: 49-6645 The ('/) - Expansion Method for Finding Traveling Wave Solutions of Some Nonlinear Pdes in Mathematical Physics J.F.Alzaidy Mathematics Department, Faculty
Vol.3, Issue., Jan-Feb. 3 pp-369-376 ISSN: 49-6645 The ('/) - Expansion Method for Finding Traveling Wave Solutions of Some Nonlinear Pdes in Mathematical Physics J.F.Alzaidy Mathematics Department, Faculty
Separatrix Map Analysis for Fractal Scatterings in Weak Interactions of Solitary Waves
 Separatrix Map Analysis for Fractal Scatterings in Weak Interactions of Solitary Waves By Yi Zhu, Richard Haberman, and Jianke Yang Previous studies have shown that fractal scatterings in weak interactions
Separatrix Map Analysis for Fractal Scatterings in Weak Interactions of Solitary Waves By Yi Zhu, Richard Haberman, and Jianke Yang Previous studies have shown that fractal scatterings in weak interactions
Galerkin method for the numerical solution of the RLW equation using quintic B-splines
 Journal of Computational and Applied Mathematics 19 (26) 532 547 www.elsevier.com/locate/cam Galerkin method for the numerical solution of the RLW equation using quintic B-splines İdris Dağ a,, Bülent
Journal of Computational and Applied Mathematics 19 (26) 532 547 www.elsevier.com/locate/cam Galerkin method for the numerical solution of the RLW equation using quintic B-splines İdris Dağ a,, Bülent
Algebra I Remediation Guide
 Algebra I Remediation Guide Focused remediation helps target the skills students need to more quickly access and practice on-grade level content. This chart is a reference guide for teachers to help them
Algebra I Remediation Guide Focused remediation helps target the skills students need to more quickly access and practice on-grade level content. This chart is a reference guide for teachers to help them
Non-degeneracy of perturbed solutions of semilinear partial differential equations
 Non-degeneracy of perturbed solutions of semilinear partial differential equations Robert Magnus, Olivier Moschetta Abstract The equation u + F(V (εx, u = 0 is considered in R n. For small ε > 0 it is
Non-degeneracy of perturbed solutions of semilinear partial differential equations Robert Magnus, Olivier Moschetta Abstract The equation u + F(V (εx, u = 0 is considered in R n. For small ε > 0 it is
Derivation of Generalized Camassa-Holm Equations from Boussinesq-type Equations
 Derivation of Generalized Camassa-Holm Equations from Boussinesq-type Equations H. A. Erbay Department of Natural and Mathematical Sciences, Faculty of Engineering, Ozyegin University, Cekmekoy 34794,
Derivation of Generalized Camassa-Holm Equations from Boussinesq-type Equations H. A. Erbay Department of Natural and Mathematical Sciences, Faculty of Engineering, Ozyegin University, Cekmekoy 34794,
Introduction LECTURE 1
 LECTURE 1 Introduction The source of all great mathematics is the special case, the concrete example. It is frequent in mathematics that every instance of a concept of seemingly great generality is in
LECTURE 1 Introduction The source of all great mathematics is the special case, the concrete example. It is frequent in mathematics that every instance of a concept of seemingly great generality is in