arxiv: v2 [cs.sy] 17 Sep 2017
|
|
|
- Dina Fields
- 5 years ago
- Views:
Transcription
1 Towards Stabilization of Distributed Systems under Denial-of-Service Shuai Feng, Pietro Tesi, Claudio De Persis arxiv: v2 [cs.sy] 17 Sep 2017 Abstract In this paper, we consider networked distributed systems in the presence of Denial-of-Service (DoS) attacks, namely attacks that prevent transmissions over the communication network. First, we consider a simple and typical scenario where communication sequence is purely Round-robin and we explicitly calculate a bound of attack frequency and duration, under which the interconnected large-scale system is asymptotically stable. Second, trading-off system resilience and communication load, we design a hybrid transmission strategy consisting of Zeno-free distributed event-triggered control and Round-robin. We show that with lower communication loads, the hybrid communication strategy enables the systems to have the same resilience as in pure Round-robin. I. INTRODUCTION Cyber-physical systems (CPSs) are increasingly appealing for industry nowadays thanks to the development of computation and communication infrastructures. The application of CPSs ranges from local control systems to large-scale systems, examples being house temperature control systems and regional grid control systems. Owing to the advances in economic and possibly reliability reasons, systems tend to be large-scale, interconnected and spatially distributed, among which communications are operated via wireless network [1]. This triggers the attention towards networked control of large-scale interconnected systems, which are possibly safety-critical and potentially exposed to malicious attacks [?]. The concept of cyber-physical security mostly concerns security against intelligent attacks. One usually classifies these attacks as either deceptive attacks or Denial-of-Service (DoS). Deceptive attacks affect the trustworthiness of transmitted data [3], [4]. Instead, DoS compromises the timeliness of information exchange, e.g. in the presence of DoS, communications are not possible [5], [6]. This paper investigates DoS attacks. We consider a largescale system composed of interconnected subsystems, which are possibly spatially distributed. The information exchange between distributed systems and controllers takes place over a shared communication channel, which implies that all the communication attempts can be denied in the presence of DoS. The literature on distributed/decentralized networked control [7] [13] and centralized system under DoS attacks [6], [14] [26] is large and diversified. In [12], based on a smallgain approach, the authors propose a parsimonious eventtriggered design, which is able to prevent Zeno behavior and Shuai Feng, Pietro Tesi and Claudio De Persis are with EN- TEG, Faculty of Science and Engineering, University of Groningen, 9747 AG Groningen, The Netherlands s.feng@rug.nl, p.tesi@rug.nl, c.de.persis@rug.nl. stabilize nonlinear distributed systems asymptotically. In [8], [10], event-triggered approaches are discussed within largescale interconnected systems. By introducing a constant in the triggering condition, the authors prove that the system converges to a region around equilibrium without the occurrence of Zeno behavior. In [14], the authors consider a scenario where malicious attacks and genuine packet losses coexist, where the effect of malicious attacks and random packet losses are merged and characterized by an overall packet drop ratio. In [25], the authors formulate a two-player zero-sum stochastic game framework to consider a remote secure estimation problem, where the signals are transmitted over a multi-channel network under DoS attacks. A problem similar to zero-sum games between controllers and strategic jammers is considered in [16]. In [18], the authors investigate DoS from the attacker s viewpoint where the objective is to consume limited energy and maximize the effect induced by DoS attacks. The paper [26] considers a stabilization problem where transmissions are event-based and the network is corrupted by periodic DoS attacks. In [20], [21], a framework is introduced where DoS attacks are characterized by frequency and duration. The contribution is an explicit characterization of DoS frequency and duration under which stability can be preserved through state-feedback control. Extensions have been considered dealing with dynamic controllers [22], [23] and nonlinear system [24]. In this paper, we consider networked distributed systems under DoS attacks, which has not been investigated so far under the class of DoS attacks introduced in [20], [21]. Previously in [20] [24], the authors analyze the behavior of systems in a centralized-system manner, where the major characteristic is that all the states are assumed to be collected and sent in one transmission attempt. In this paper, we analyze the problem from the distributed system point of view, where the interconnected subsystems share one communication channel and transmission attempts of the subsystems take place asynchronously. The contribution of this paper is twofold. First, we consider a simple but typical scenario where the communication sequence is purely Round-robin and we explicitly compute a bound on attack frequency and duration, under which the large-scale system is asymptotically stable. Second, trading-off system resilience and communication load, we design a hybrid transmission strategy. Specifically, in the absence of DoS attacks, we design a distributed event-triggered control using small gain argument, which guarantees practical stability of the closedloop system while preventing the occurrence of Zeno behavior. During DoS-active periods, communication switches to Round-robin, aiming at quick communication restore. This
2 hybrid communication strategy surprisingly ends up with the same bound as pure Round-robin transmission but promotes the possibility to save communication resources. The paper is organized as follows. In Section II, we introduce the framework of interest along with the considered family of DoS attacks. In Section III, we present the main result. We first use small gain approach to study large-scale system under Round-robin. Subsequently, we introduce the main result of this paper: the characterization of frequency and duration of DoS attacks, under which the large-scale system is asymptotically stable. Section IV briefly introduces a hybrid transmission design, which achieves the same result as in Section III with lower communication load. Section V discusses numerical simulations and Section VI ends the paper with conclusions and possible future research directions. A. Notation We denote by R the set of reals. Given α R, we let R >α (R α ) denote the set of reals greater than (greater than or equal to) α. We let N 0 denote the set of nonnegative integers, N 0 := {0,1,...}. The prime denotes transpose. Given a vector v R n, v is its Euclidean norm. Given a matrix M, M is its spectral norm. Given two sets A and B, we denote by B\A the relative complement of A in B, i.e., the set of all elements belonging to B, but not to A. II. FRAMEWORK A. Networked distributed system Consider a large-scale system consisting of N interacting subsystems, whose dynamics satisfy ẋ i (t) = A i x i (t)+b i u i (t)+ H ij x j (t) (1) where A i, B i and H ij are matrices with appropriate dimensions and t R 0. x i (t) and u i (t) are state and control input of subsystem i, respectively. Here we assume that all the subsystems are full state output.n i denotes for the set of neighbors of subsystem i. Subsystem i physically interacts through H ij x j (t) with its neighbor subsystem(s) j N i. Here we consider bidirectional edges, i.e. j N i when i N j. The distributed systems are controlled via a shared networked channel, through which distributed plants broadcast the measurements and controllers send control inputs. The computation of control inputs is based on the transmitted measurements. The received measurements are in sampleand-hold fashion such as x i (t i k ) where ti k represents the sequence of transmission instants of subsystem i. We assume that there exists a feedback matrix K i such that Φ i = A i +B i K i is Hurwitz. Therefore, the control input applied to subsystem i is given by u i (t) = K i x i (t i k )+ L ij x j (t j k ) (2) where L ij is the coupling gain in the controller. Here we assume that the channel is noiseless and there is no quantization. Moreover, we assume that the network transmission delay and the computation time of control inputs are zero. B. DoS attacks frequency and duration We refer to Denial-of-Service as the phenomenon for which transmission attempts may fail. In this paper, we do not distinguish between transmission failures due to channel unavailability and transmission failures because of DoSinduced packet corruption. Since the network is shared, DoS simultaneously affects the communication attempts of all the subsystems. Clearly, the problem in question does not have a solution if the DoS amount is allowed to be arbitrary. Following [21], we consider a general DoS model that constrains the attacker action in time by only posing limitations on the frequency of DoS attacks and their duration. Let {h n } n N0, h 0 0, denote the sequence of DoS off/on transitions, i.e., the time instants at which DoS exhibits a transition from zero (transmissions are possible) to one (transmissions are not possible). Hence, H n := {h n } [h n,h n +τ n [ (3) represents the n-th DoS time-interval, of a length τ n R 0, over which the network is in DoS status. If τ n = 0, then H n takes the form of a single pulse at h n. If τ n 0, [h n,h n + τ n [ represents an interval from the instant h n (include h n ) to (h n + τ n ) (arbitrarily close to but exclude h n + τ n ). Similarly, [τ,t[ represents an interval from τ to t. Given τ,t R 0 with t τ, let n(τ,t) denote the number of DoS off/on transitions over [τ, t[, and let Ξ(τ,t) := [τ,t] (4) n N 0 H n denote the subset of[τ,t] where the network is in DoS status. The subset of time where DoS is absent is denoted by Θ(τ,t) := [τ,t]\ξ(τ,t) (5) We make the following assumptions. Assumption 1: (DoS frequency). There exist constants η R 0 and τ D R >0 such that n(τ,t) η + t τ τ D (6) for all τ,t R 0 with t τ. Assumption 2: (DoS duration). There exist constants κ R 0 and T R >1 such that Ξ(τ,t) κ+ t τ (7) T for all τ,t R 0 with t τ. Remark 1: Assumptions 1 and 2 do only constrain a given DoS signal in terms of its average frequency and duration. Actually, τ D can be defined as the average dwelltime between consecutive DoS off/on transitions, while η is the chattering bound. Assumption 2 expresses a similar requirement with respect to the duration of DoS. It expresses
3 the property that, on the average, the total duration over which communication is interrupted does not exceed a certain fraction of time, as specified by1/t. Likeη, the constant κ plays the role of a regularization term. It is needed because during a DoS interval, one has Ξ(h n,h n + τ n ) = τ n > τ n /T. Thus κ serves to make (7) consistent. Conditions τ D > 0 and T > 1 imply that DoS cannot occur at an infinitely fast rate or be always active. III. MAIN RESULT In this section, our objective is to find stability conditions for the networked distributed systems under DoS attacks. We first study the stabilization problem of large-scale systems under a digital communication channel in the absence of DoS. A. A small-gain approach for large-scale systems under networked communication For each subsystemi, we denote bye i (t) the error between the value of the state transmitted to its neighbors and the current state, i.e., e i (t) = x i (t i k) x i (t), i = 1,2,...,N (8) Then combine (1), (2) and (8), the dynamics of subsystem i can be written as ẋ i (t) = Φ i x i (t)+b i K i e i (t)+ (B i L ij +H ij )x j (t) +B i L ij e j (t) (9) from which one sees that the dynamics of subsystem i depend on the interconnected neighbors x j (t) as well as e i (t), e j (t) and the coupling parameters. Intuitively, if the couplings are weak and e remains small, then stability can be achieved. Here, the notion smallness of e can be characterized by the x-dependent bound e i (t) σ i x i (t), in which σ i is a suitable design parameter. Notice that this is not the network update rule. We implement a periodic sampling protocol, e.g. Roundrobin, as our update law. In this respect, we make the following hypothesis. Assumption 3: (Inter-sampling of Round-robin). In the absence of DoS attacks, there exists an inter-sampling interval such that e i (t) σ i x i (t) (10) holds, where σ i is a suitable design parameter. For centralized settings, values of satisfying a bound like (10) can be explicitly determined. On the other hand, in [11], [27], the authors compute and apply a lower bound of time elapsed between two events to prevent Zeno behavior, where the distributed/decentralized systems are asymptotically stable. The problem of obtaining is left for future research. As mentioned in the foregoing argument, σ i should be designed carefully. Otherwise, even if there exists a under which (10) holds, in the event of an inappropriateσ i, stability can be lost as well. Given any symmetric positive definite matrix Q i, let P i be the unique solution of the Lyapunov equation Φ T i P i + P i Φ i +Q i = 0. For each i, consider the Lyapunov function V i = x T i P ix i, which satisfies λ min (P i ) x i (t) 2 V i (x i (t)) λ max (P i ) x i (t) 2 (11) where λ min (P i ) and λ max (P i ) represent the smallest and largest eigenvalue of P i, respectively. The following lemma presents the design of σ i guaranteeing stability. Lemma 1: Consider a distributed system as in (1) along with a control input as in (2). Suppose that the spectral radius r(a 1 B) < 1. The distributed system is asymptotically stable if σ i satisfies σ i < l i j i (12) where l i is the i-th entry of row vector L := µ T (A B) = [l 1, l 2,...,l N ] and j i is the j-th entry of row vector J := µ T Γ = [j 1, j 2,...,j N ].µ R N + is an arbitrary column vector satisfying µ T ( A+B) < 0. The matrices A, B and Γ are given by with A = B = Γ = α i α 1... α N 0 β 12 β 1N β 21 0 β 23 β 2N.. 0. β N1 β N2 0 γ 11 γ 12 γ 1N γ 21 γ 22 γ 23 γ 2N.. γ N1 γ N2 (13).. γ NN = λ min (Q i ) β ij = P i 2 B i L ij +H ij 2 γ ii = P i 2 B i K i 2 γ ij = P i 2 B i L ij 2 (14) (15) 2 (16) (17) (18) (19) where is a positive real such that α i > 0 and λ min (Q i ) is the smallest eigenvalue of Q i for i = 1,2,...,N. Proof. Recalling that V i = x T i P ix i, the derivative of V i
4 along the solution to (9) satisfies V i (x i (t)) λ min (Q i ) x i (t) 2 + 2P i B i K i x i (t) e i (t) + 2P i (B i L ij +H ij ) x i (t) x j (t) + 2P i B i L ij x i (t) e j (t) (20) Observe that for any positive real, the Young s inequalities yield 2P i B i K i x i (t) e i (t) x i (t) 2 + P i 2 B i K i 2 e i (t) 2 (21) 2P i (B i L ij +H ij ) x i (t) x j (t) x i (t) 2 + P i 2 B i L ij +H ij 2 x j (t) 2 (22) 2P i B i L ij x i (t) e j (t) x i (t) 2 + P i 2 B i L ij 2 e j (t) 2 (23) Hence, the derivative of V i along the solution to (9) satisfies V i (x(t)) α i x i (t) 2 + β ij x j (t) 2 +γ ii e i (t) 2 + γ ij e j (t) 2 (24) where α i, β ij, γ ii and γ ij are as in Lemma 1. Notice that one can always find a such that α i > 0 for i = 1,2,...,N. By defining vectors V vec (x i (t)) := [V 1 (x 1 (t)),v 2 (x 2 (t)),...,v N (x N (t))] T x(t) vec e(t) vec := [ x 1 (t) 2, x 2 (t) 2,..., x N (t) 2 ] T := [ e 1 (t) 2, e 2 (t) 2,..., e N (t) 2 ] T the inequality (24) can be compactly written as V vec (x i (t)) ( A+B) x(t) vec +Γ e(t) vec (25) with A, B and Γ being as in Lemma 1. If the spectral radius satisfies r(a 1 B) < 1, there exists a positive vector µ R n + such that µt ( A+B) < 0. We refer readers to [28] for more details. We select the Lyapunov function V(x(t)) := µ T V vec (x i (t)). Then the derivative of V yields V(x(t)) = µ T Vvec (x i (t)) µ T ( A+B) x(t) vec +µ T Γ e(t) vec (26) By noticing that µ T ( A+B) < 0, we have V(x(t)) L x(t) vec +J e(t) vec (27) where L := µ T (A B) and J := µ T Γ are row vectors. Denote l i and j i as the entries of L and J, respectively. Then, (27) yields V(x(t)) l i x i (t) 2 + j i e i (t) 2 = (l i x i (t) 2 j i e i (t) 2 ) (28) which implies asymptotic stability with σ i < li Remark 2: Lemma 1 can only deal with the case where j i > 0. The case j i = 0 is only possible whenever every entry in the column i of Γ is zero. In fact, j i = 0 implies that the error e i (t) never contributes to the system dynamics via (28), which in turn implies that e i (t) does not affect stability at all. Therefore, in the case j i = 0, no constraint on e i (t) is imposed. B. Stabilization of distributed systems under DoS In the previous analysis, we have introduced the design of a suitable σ i and hence error bound, under which the system is asymptotically stable in the absence of DoS. By hypothesis, we also assumed the existence of a Roundrobin transmission that satisfies such error bound. In the presence of DoS, (10) is possibly violated even though the sampling strategy is still Round-robin. Under such circumstances, stability can be lost. Hence, we are interested in the stabilization problem when the Round-robin network is under DoS attacks. Theorem 1: Consider a distributed system as in (1) along with a control input as in (2). The plant-controller information exchange takes place over a shared network, in which the communication protocol is Round-robin with sampling interval as in Assumption 3. The large-scale system is asymptotically stable for any DoS sequence satisfying Assumption 1 and 2 with arbitrary η and κ, and with τ D and T if 1 T + < ω 1 (29) τ D ω 1 +ω 2 in which = N, ω 1 := min{ li σ2 i ji λ max(p i)µ i } and ω 2 := 4max{j i} min{µ iλ min(p i)}. l i, j i, µ i and σ i are as in Lemma 1. Proof. The proof is divided into three steps: Step 1. Lyapunov function in DoS-free periods. In DoSfree periods, by hypothesis of Assumption 3, (10) holds true with σ i as in Lemma 1 and (28) is negative. Therefore, the derivative of the Lyapunov function satisfies V(x(t)) (l i j i σ 2 i ) x i(t) 2 j i. l i σi 2j i µ i V i λ max (P i )µ i = ω 1 V (30) where ω 1 := min{ li σ2 i ji λ max(p i)µ i }. Thus for t [h n +τ n,h n+1 [ (DoS-free time), the Lyapunov function yields V(x(t)) e ω1(t hn τn) V(x(h n +τ n )) (31) Step 2. Lyapunov function in DoS-active periods. Here we let zm i denote the last successful sampling instant before
5 the occurrence of DoS. Recalling the definition of e i (t), we obtain that and e i (t) = x i (z i m) x i (t) = x i (h n ) x i (t) (32) e i (t) 2 x i (h n ) 2 +2 x i (t) x i (h n ) + x i (t) 2 (33) for t H n. By summing up e i (t) 2 for i N, we obtain i (t) e 2 x i (h n ) 2 + x i (t) 2 + ( x i (h n ) 2 + x i (t) 2 ) = 2 x i (h n ) 2 +2 i (t) x 2 (34) If x i(h n ) 2 x i(t) 2, we have that e i(t) 2 4 x i(t) 2. Otherwise, we have e i(t) 2 4 x i(h n ) 2 Recalling (28), it is simple to see that V(x(t)) j i e i (t) 2 (35) Thus, for all t H n (DoS-active time) in the case that x i(h n ) 2 x i(t) 2, the derivative of the Lyapunov function yields V(x(t)) max{j i } e i (t) 2 4max{j i } x i (t) 2 4max{j i } µ i V(x i (t)) min{µ i λ min (P i )} = ω 2 V(x(t)) (36) 4max{j i} min{µ iλ min(p i)} with ω 2 :=. On the other hand, for all t H n such that x i(h n ) 2 > x i(t) 2, one has V(x(t)) ω 2 V(x(h n )) (37) Thus, (36) and (37) imply the Lyapunov function during H n satisfies V(x(t)) e ω2(t hn) V(x(h n )) (38) Step 3. Switching between stable and unstable modes. Consider a DoS attack with period τ n, at the end of which the overall system has to wait an additional period with length N to have a full round of communications. Hence, the period where at least one subsystem transmission is not successful can be upper bounded by τ n + N. For all τ,t R 0 with t τ, the total length where communication is not possible over[τ,t[, say Ξ(τ,t), can be upper bounded by Ξ(τ,t) Ξ(τ,t) +(1+n(τ,t)) κ + t τ T (39) where = N, κ := κ+(1+η) and T := τdt τ D+T. Considering the additional waiting time due to Roundrobin, the Lyapunov function in (31) yields V(x(t)) e ω1(t hn τn N ) V(h n + τ n + N )) for t [h n + τ n + N,h n+1 [ and V(x(t)) e ω2(t hn) V(h n ) for t [h n,h n +τ n +N [. Thus, the overall behavior of the closed-loop system can be regarded as a switching system with two modes. Applying simple iterations to the Lyaponov functions in and out of DoS status, one has V(x(t)) e ω1 Θ(0,t) e ω2 Ξ(0,t) V(x(0)) e κ (ω1+ω2) e β t V(x(0)) (40) where β := ω 1 (ω 1 + ω 2 )( τ D + 1 T ). By constraining β < 0, one obtains the desired result in (29). Hence, stability is implied at once. Remark 3: The resilience of the distributed systems depends on the largeness of ω 1 and the smallness of ω 2. To achieve this, one can try to findk i andl ij such that B i K i and B i L ij are small. On the other hand, the sampling interval of Round-robin also affects stability in the sense that it determines how fast the overall system can restore the communication. One can always apply smaller Round-robin inter-sampling time to reduce the left-hand side of (29) at the expense of higher communication load. IV. APPROXIMATION OF RESILIENCE WITH REDUCED COMMUNICATION: HYBRID TRANSMISSION STRATEGY In the foregoing argument (cf. Remark 3), we have shown that system resilience depends on the sampling rate of Round-robin. The faster the sampling rate of Round-robin, the quicker the overall system restores the communication. On the other hand, in DoS-free periods, we are interested in the possibility of reducing communication load while maintaining the comparable robustness as in Section III. To realize this, we propose a hybrid transmission strategy: in the absence of DoS, the communications of the distributed systems are event-based; if DoS occurs, the communications switch to Round-robin until the moment where every subsystem has one successful update. The advantage of event-triggered control is saving communication resources. However, the effectiveness of prolonging transmission intervals, in turn, appears to be a disadvantage in the presence of DoS. The main shortcoming concerns that event-triggered control could potentially prolong DoS status. For example, consider that the sampling strategy is purely event-based. After a DoS attack, there is a short period where communications are possible, during which the error bounds as in (10) are not violated so that systems do not update. If DoS appears soon, this is equivalent to the scenario that systems face a longer DoS attack. This indicates that a better strategy is to save communications in the absence of DoS and restore communications as soon as possible when DoS is over, which leads indeed to a hybrid communication strategy.
6 A. Zeno-free event-triggered control of distributed systems in the absence of DoS Abusing the notation, in this section we denote {t i k } as the triggering time sequence of subsystem i under eventtriggered control scheme. For a given initial condition x i (0), if t i k converges to a finite ti, we say that the eventtriggered control induces Zeno behavior [11], [12]. Hence, Zeno-freeness implies an event-triggered control scheme preventing the occurrence of Zeno behavior. The following lemma addresses the Zeno-free event-triggered control. Lemma 2: Consider a distributed system as in (1) along with a control input as in (2). Suppose that the spectral radius r(a 1 B) < 1. In the absence of DoS, the distributed system is practically stable and Zeno-free if the event-triggered law satisfies e i (t) max{σ i x i (t), c i } (41) in which c i is a positive finite real and l i σ i < min{,1} (42) j i where l i and j i are the same as in Lemma 1. Proof. By Lemma 1 if spectral radius r(a 1 B) < 1, (28) holds true. Then one can observe that the event-triggered control law (41) would lead (28) to V(x(t)) (l i x i (t) 2 j i max{σ 2 i x i(t) 2, c 2 i }) max{ (l i j i σ 2 i ) x i(t) 2, l i x i (t) 2 + j i c 2 i } (l i j i σi 2 ) x i(t) 2 + j i c 2 i (43) which implies practical stability with σ i < min{ li j i,1} and finite c i. Then we introduce the analysis about Zeno-freeness of this distributed event-triggered control law. Sinceė i (t) = ẋ i (t), then the dynamics of e i satisfy ė i (t) = A i e i (t) Φ i x i (t i k ) (B i L ij +H ij )x j (t j k ) + H ij e j (t) (44) From the triggering law (41), one can obtain x i (t i k ) x i (t) max{σ i x i (t),c i } and further calculations yield x i (t) x i (t i k ) σ i x i (t) + c i. Thus, it is simple to verify that e i (t) σ i x i (t i k ) + σ ic i, where σ i := σi 1 σ i. For each i, at the instant t i k+1, e i(t) satisfies e i (t i k+1 ) f i Φ i x i (t i k ) +f i B i L ij +H ij m +f i H ij σ j (m+c j ) (45) where f i := t i k+1 t i k e A(ti k+1 τ) dτ, m = max{ x j (t j p ) } for t i k tj p < ti k+1 and j N i. Meanwhile, the triggering law in (41) implies that e i (t i k+1 ) c i. Then, one immediately sees that t i k+1 ti k z i, if µ Ai 0, t i k+1 ti k 1 µ Ai log(z i µ Ai +1), if µ Ai > 0, in which z i := Φ i x i (t i k ) +m ζ ij + H ij σ j c j c i (46) where ζ ij := B i L ij + H ij + H ij σ j and µ Ai is the logarithmic norm of A i. Notice that the system is practically stable, so that x i (t i k ) and m are bounded. This implies that z i > 0 and hence t i k+1 ti k > 0. B. Stabilization of distributed systems with hybrid transmission strategy under DoS As a counterpart of Assumption 3, here we assume that there exists a Round-bobin sampling interval satisfying (41). Now we are ready to present the following result. Theorem 2: Consider a distributed system as in (1) along with a control input as in (2). The plant-controller information exchange takes place over a shared network implementing the event-triggered control law (41) in the absence of DoS. Suppose that there exists a Round-robin sampling interval such that (41) holds. The network is subject to DoS attacks regulated by Assumption 1 and 2, during which the communication switches to Round-robin until every subsystem updates successfully. Then the distributed system is practically stable if (29) holds true. Proof. Similar to the proof of Theorem 1, considering the additional waiting time N due to Round-robin for the restoring of communications, in DoS-free periods the Lyapunov function satisfies V(x(t)) e ω1(t hn τn N ) V(x(h n +τ n +N )) + c ω 1 (47) for t [h n +τ n +N,h n+1 [, where ω 1 is as in Theorem 1 and c := N i=1 j ic 2 i. On the other hand, (38) still holds for t [h n,h n +τ n +N [. Applying the very similar calculation as in Step 3 in the proof of Theorem 1, we obtain V(x(t)) e ω1 Θ(0,t) e ω2 Ξ(0,t) V(x(0)) q + e ω1 Θ(h n,t) e ω2 Ξ(h n,t) c + c ω 1 ω 1 n=0 e κ (ω1+ω2) e β t V(x(0)) q +e κ (ω1+ω2) e β (t hn) c + c (48) ω 1 ω 1 n=0 where n N 0, q := sup{q N 0 h q t} and β is as in the proof of Theorem 1. Notice that t h n τ D n(h n,t) τ D η
) e κ (ω1+ω2) e β t V(x(0)) q +e κ (ω1+ω2)+β τdη e β τdn(hn,t) c ω n=0 1")
 1 for t h n+1.")
) + eκ (ω1+ω2)+β τdη cpsfrag + c replacements (51) 1 e β τd ω 1 ω 1 x 1 If (29) holds, it is simple to")

 = 4.5x 1 (t 1 k) 1.")
 yields P 1 = 0.1429 and P 2 = 0.1. The matrices are A = [0.7 0;0 0.9], B = [0 0.0327;0.")
![1 0] and Γ = [4.1327 0.4; 0.1 3.6] according to Lemma 1.](/docs-images/94/118490412/images/7-8.jpg "From these parameters, we obtain that the spectral radius r(a 1 B) = 0.072, σ 1 < 0.3765 and σ 2 < 0.4657.")



, we obtain τ D + 1 T = 0.")

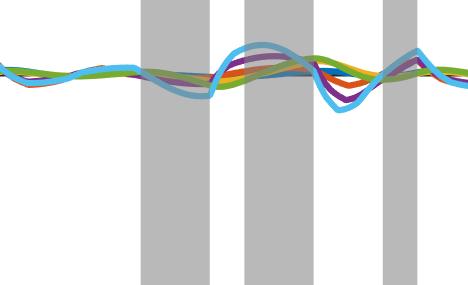
 DoS u(t k ) Fig. 1.")

7 by exploiting Assumption 1. Then, the Lyapunov function yields V(x(t)) e κ (ω1+ω2) e β t V(x(0)) q +e κ (ω1+ω2)+β τdη e β τdn(hn,t) c ω n=0 1 + c PSfrag replacements (49) x ω 1 1 x 2 Recalling the definition of Assumption 1, one has that DoS n(h n,t) n(h n+1,t) 1 for t h n+1. This implies that q e β τdn(hn,t) n=0 Finally, (49) can be written as 1 1 e β τd (50) V(x(t)) e κ (ω1+ω2) e β t V(x(0)) + eκ (ω1+ω2)+β τdη cpsfrag + c replacements (51) 1 e β τd ω 1 ω 1 x 1 If (29) holds, it is simple to verify that β < 0, which x 2 implies practical stability. A. Example 1 V. SIMULATION The numerical example is taken from [29]. The systems are open-loop unstable such as ẋ 1 (t) = x 1 (t)+u 1 (t)+x 2 (t) ẋ 2 (t) = x 2 (t)+u 2 (t) under distributed control inputs such that u 1 (t) = 4.5x 1 (t 1 k) 1.4x 2 (t 2 k) u 2 (t) = 6x 2 (t 2 k ) x 1(t 1 k ) Solutions of the Lyapunov equationφ T i P i+p i Φ i +Q i = 0 with Q i = 1 (i = 1,2) yields P 1 = and P 2 = 0.1. The matrices are A = [0.7 0;0 0.9], B = [ ;0.1 0] and Γ = [ ; ] according to Lemma 1. From these parameters, we obtain that the spectral radius r(a 1 B) = 0.072, σ 1 < and σ 2 < We let σ 1 = σ 2 = 0.2. Based on Assumption 3, we choose Roundrobin sampling interval = 0.01s. ω 1 ω 1+ω 2 With those parameters, we obtain the bound with ω and ω This implies that a maximum duty cycle of 1.75% of a sustained DoS would not destabilize our systems in the example. Actually, this bound is conservative. The systems in inspection can endure more DoS without losing stability. As shown in Figure 1, lines represent states and gray stripes represent the presence of DoS. Over a simulation horizon of 20s, the DoS corresponds to parameters of τ D and T 2.5, and 40% of transmission failures. According to (29), we obtain τ D + 1 T = 0.411, which violates the theoretical bound, but the system is still stable. Meanwhile, the hybrid transmission strategy is able to reduce communications effectively. As shown in Figure 1. the transmissions with the hybrid transmission strategy is only 10% of the transmissions with the pure Round-robin strategy. u(t k ) DoS u(t k ) Fig. 1. Example 1: Top picture States under pure Round-robin communication where there are 1200 transmissions in total; Bottom picture States under hybrid communication strategy where there are 112 transmissions. B. Example 2 In this example, we consider a physical system in [30]. The system is composed of N inverted pendulums interconnected as a line by springs, whose states are x i = [ x i, x i ] T for i = 1,2,...,N. Here, we consider a simple case where N = 3. The parameters of the pendulums are [ A 1 = A 3 = ], A 2 = [ B 1 = B 2 = B 3 = [ [ H 12 = H 21 = H 23 = H 32 = ] The parameter of designed controllers are given by K 1 = K 3 = [ 23 12], K 2 = [ 18 12] L 12 = L 32 = [ ], L 21 = L 23 = [ ] With the solutions of Lyapunov functionφ T i P i+p i Φ i +Q i = 0 where Q i = I and i = 1,2,3, we obtain A = , B = Γ = ] ]



.")
 replacements DoS u(t k ) Fig. 2.")






![can be an interesting direction from a practical viewpoint. REFERENCES [1] N. Sandell, P. Varaiya, M.](/docs-images/94/118490412/images/8-15.jpg "Athans, and M.")






![Control, pp. 31 45, 2009. [7] X. Wang and M. D.](/docs-images/94/118490412/images/8-23.jpg "Lemmon, Event-triggering in distributed networked control systems, IEEE Transactions on Automatic Control, vol.")
![56, no. 3, pp. 586 601, 2011. [8] M. Guinaldo, D. V. Dimarogonas, D. Lehmann, and K. H.](/docs-images/94/118490412/images/8-24.jpg "Johansson, Distributed event-based control for interconnected linear systems, in Asynchronous Control for")

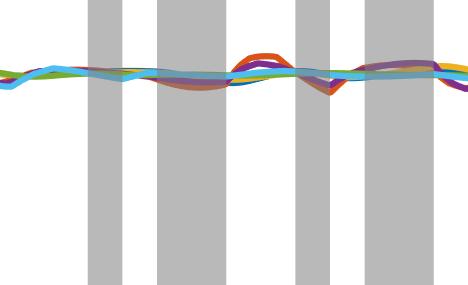



8 replacements With A, B and Γ we obtain that r(a 1 B) = , σ 1 < , σ 2 < and σ 3 < We select σ 1 = σ 2 = σ 3 = The Round-robin sampling interval is chosen as = 0.001s according to Assumption 3. Follow ω 1 ω 1+ω 2 the same procedures as in Example 1, we obtain , which is considerably conservative. In fact, if the systems are under the same DoS attacks as in Example 1, they are still stable, which can be seen from Figure 2. The conservativeness is due to the unstable dynamics of the inverted pendulums, the feedback gain K i and the coupling parameter L ij in the controllers. It is worth investigating how to design suitable K i and L ij to mitigate this effect (cf. Remark 3). x 1 x 2 DoS u(t k ) replacements x 1 x 2 DoS u(t k ) Fig. 2. Example 2: Top picture States under Pure Round-robin communication during which there are transmissions; Bottom picture States under hybrid communication strategy where there are 254 transmissions. VI. CONCLUSIONS In this work, we investigated the problem of stabilizing distributed systems under Denial-of-Service, characterizing DoS frequency and duration under which stability can be preserved. In order to save communication resources, we also consider a hybrid communication strategy. It turns out that the hybrid transmission strategy can reduce communication load effectively and prevent Zeno behavior while preserving the same robustness as pure Round-robin protocol. An interesting research direction is the stabilization problem of networked distributed systems, where only a fraction of subsystems, possibly time-varying are under DoS. It is also interesting to investigate the problem where DoS attacks imposing on systems are asynchronous with different frequencies and durations. Finally, in the hybrid transmission strategy, the effect of event-triggered control with communication collision can be an interesting direction from a practical viewpoint. REFERENCES [1] N. Sandell, P. Varaiya, M. Athans, and M. Safonov, Survey of decentralized control methods for large scale systems, IEEE Transactions on Automatic Control, vol. 23, no. 2, pp , [2] P. Cheng, A. Datta, L. Shi, and Sinopoli, B. (eds.), Special issue on secure control of cyber physical systems, IEEE Transactions on Control of Network Systems, [3] H. Fawzi, P. Tabuada, and S. Diggavi, Secure state-estimation for dynamical systems under active adversaries, Annual Allerton Conference on Communication, Control, and Computing, [4] A. Teixeira, I. Shames, H. Sandberg, and K. Johansson, A secure control framework for resource-limited adversaries, Automatica, vol. 51, pp , [5] W. Xu, W. Trappe, Y. Zhang, and T. Wood, The feasibility of launching and detecting jamming attacks in wireless networks, in Proceedings of the 6th ACM international symposium on Mobile ad hoc networking and computing. ACM, 2005, pp [6] S. Amin, A. Càrdenas, and S. Sastry, Safe and secure networked control systems under denial-of-service attacks, Hybrid systems: Computation and Control, pp , [7] X. Wang and M. D. Lemmon, Event-triggering in distributed networked control systems, IEEE Transactions on Automatic Control, vol. 56, no. 3, pp , [8] M. Guinaldo, D. V. Dimarogonas, D. Lehmann, and K. H. Johansson, Distributed event-based control for interconnected linear systems, in Asynchronous Control for Networked Systems. Springer, 2015, pp [9] C. De Persis, R. Sailer, and F. Wirth, On a small-gain approach to distributed event-triggered control, IFAC Proceedings Volumes, vol. 44, no. 1, pp , [10], Event-triggering of large-scale systems without zeno behaviour, in Proceedings of the 20th international symposium on mathematical theory of networks and systems MTNS2012, [11], On inter-sampling times for event-triggered large-scale linear systems, in Decision and Control (CDC), 2013 IEEE 52nd Annual Conference on. IEEE, 2013, pp [12], Parsimonious event-triggered distributed control: A zeno free approach, Automatica, vol. 49, no. 7, pp , [13] T. Liu, Z.-P. Jiang, and D. J. Hill, Decentralized output-feedback control of large-scale nonlinear systems with sensor noise, Automatica, vol. 48, no. 10, pp , [14] A. Cetinkaya, H. Ishii, and T. Hayakawa, Networked control under random and malicious packet losses, IEEE Transactions on Automatic Control, vol. PP, no. 99, pp. 1 16, [15] A. Gupta, C. Langbort, and T. Başar, Optimal control in the presence of an intelligent jammer with limited actions, in Proc. of the 49th IEEE Conference on Decision and Control, Atlanta, GA, USA, 2010, pp [16] V. Ugrinovskii and C. Langbort, Control over adversarial packetdropping communication networks revisited, arxiv: , [17] H. Zhang, P. Cheng, L. Shi, and J. Chen, Optimal denial-of-service attack scheduling with energy constraint, IEEE Transactions on Automatic Control, vol. 60, no. 11, pp , [18], Optimal dos attack scheduling in wireless networked control system, IEEE Transactions on Control Systems Technology, vol. 24, no. 3, pp , [19] H. Shisheh Foroush and S. Martínez, On multi-input controllable linear systems under unknown periodic dos jamming attacks, in 2013 SIAM Conference on Control and its Applications, San Diego, CA, [20] C. De Persis and P. Tesi, Resilient control under denial-of-service, in Proc. of the 19th IFAC World Conference, Cape Town, South Africa, 2014, pp [21] C. De Persis and P. Tesi, Input-to-state stabilizing control under denial-of-service, IEEE Transactions on Automatic Control, vol. 60, no. 11, pp , [22] V. Dolk, P. Tesi, C. De Persis, and W. Heemels, Event-triggered control systems under denial-of-service attacks, in Proc. of the 54th IEEE Conference on Decision and Control, Osaka, Japan, 2015.
9 [23] S. Feng and P. Tesi, Resilient control under denial-of-service: Robust design, Automatica, vol. 79, pp , [24] C. De Persis and P. Tesi, On resilient control of nonlinear systems under denial-of-service, in Proc. of the IEEE Conference on Decision and Control, Los Angeles, CA, USA, [25] K. Ding, Y. Li, D. E. Quevedo, S. Dey, and L. Shi, A multi-channel transmission schedule for remote state estimation under dos attacks, Automatica, vol. 78, pp , [26] H. S. Foroush and S. Martinez, On event-triggered control of linear systems under periodic denial-of-service jamming attacks, in Decision and Control (CDC), 2012 IEEE 51st Annual Conference on. IEEE, 2012, pp [27] M. Mazo and P. Tabuada, Decentralized event-triggered control over wireless sensor/actuator networks, IEEE Transactions on Automatic Control, vol. 56, no. 10, pp , [28] S. Dashkovskiy, H. Ito, and F. Wirth, On a small gain theorem for iss networks in dissipative lyapunov form, European Journal of Control, vol. 17, no. 4, pp , [29] F. Forni, S. Galeani, D. Nešić, and L. Zaccarian, Lazy sensors for the scheduling of measurement samples transmission in linear closed loops over networks, in IEEE Conference on Decision and Control and European Control Conference, Atlanta, USA, [30] X. Wang and M. D. Lemmon, Event-triggered broadcasting across distributed networked control systems, in American Control Conference, IEEE, 2008, pp
On a small-gain approach to distributed event-triggered control
 On a small-gain approach to distributed event-triggered control Claudio De Persis, Rudolf Sailer Fabian Wirth Fac Mathematics & Natural Sciences, University of Groningen, 9747 AG Groningen, The Netherlands
On a small-gain approach to distributed event-triggered control Claudio De Persis, Rudolf Sailer Fabian Wirth Fac Mathematics & Natural Sciences, University of Groningen, 9747 AG Groningen, The Netherlands
Networked Control Systems, Event-Triggering, Small-Gain Theorem, Nonlinear
 EVENT-TRIGGERING OF LARGE-SCALE SYSTEMS WITHOUT ZENO BEHAVIOR C. DE PERSIS, R. SAILER, AND F. WIRTH Abstract. We present a Lyapunov based approach to event-triggering for large-scale systems using a small
EVENT-TRIGGERING OF LARGE-SCALE SYSTEMS WITHOUT ZENO BEHAVIOR C. DE PERSIS, R. SAILER, AND F. WIRTH Abstract. We present a Lyapunov based approach to event-triggering for large-scale systems using a small
A Novel Integral-Based Event Triggering Control for Linear Time-Invariant Systems
 53rd IEEE Conference on Decision and Control December 15-17, 2014. Los Angeles, California, USA A Novel Integral-Based Event Triggering Control for Linear Time-Invariant Systems Seyed Hossein Mousavi 1,
53rd IEEE Conference on Decision and Control December 15-17, 2014. Los Angeles, California, USA A Novel Integral-Based Event Triggering Control for Linear Time-Invariant Systems Seyed Hossein Mousavi 1,
Distributed Event-Based Control for Interconnected Linear Systems
 211 5th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC Orlando, FL, USA, December 12-15, 211 Distributed Event-Based Control for Interconnected Linear Systems M Guinaldo,
211 5th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC Orlando, FL, USA, December 12-15, 211 Distributed Event-Based Control for Interconnected Linear Systems M Guinaldo,
Event-Triggered Decentralized Dynamic Output Feedback Control for LTI Systems
 Event-Triggered Decentralized Dynamic Output Feedback Control for LTI Systems Pavankumar Tallapragada Nikhil Chopra Department of Mechanical Engineering, University of Maryland, College Park, 2742 MD,
Event-Triggered Decentralized Dynamic Output Feedback Control for LTI Systems Pavankumar Tallapragada Nikhil Chopra Department of Mechanical Engineering, University of Maryland, College Park, 2742 MD,
Event-Triggered Output Feedback Control for Networked Control Systems using Passivity: Time-varying Network Induced Delays
 5th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC) Orlando, FL, USA, December -5, Event-Triggered Output Feedback Control for Networked Control Systems using Passivity:
5th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC) Orlando, FL, USA, December -5, Event-Triggered Output Feedback Control for Networked Control Systems using Passivity:
Event-Triggered Broadcasting across Distributed Networked Control Systems
 Event-Triggered Broadcasting across Distributed Networked Control Systems Xiaofeng Wang and Michael D. Lemmon Abstract This paper examines event-triggered broadcasting of state information in distributed
Event-Triggered Broadcasting across Distributed Networked Control Systems Xiaofeng Wang and Michael D. Lemmon Abstract This paper examines event-triggered broadcasting of state information in distributed
Decentralized Event-triggered Broadcasts over Networked Control Systems
 Decentralized Event-triggered Broadcasts over Networked Control Systems Xiaofeng Wang and Michael D. Lemmon University of Notre Dame, Department of Electrical Engineering, Notre Dame, IN, 46556, USA, xwang13,lemmon@nd.edu
Decentralized Event-triggered Broadcasts over Networked Control Systems Xiaofeng Wang and Michael D. Lemmon University of Notre Dame, Department of Electrical Engineering, Notre Dame, IN, 46556, USA, xwang13,lemmon@nd.edu
Coding Sensor Outputs for Injection Attacks Detection
 53rd IEEE Conference on Decision and Control December 15-17, 2014 Los Angeles, California, USA Coding Sensor Outputs for Injection Attacks Detection Fei Miao Quanyan Zhu Miroslav Pajic George J Pappas
53rd IEEE Conference on Decision and Control December 15-17, 2014 Los Angeles, California, USA Coding Sensor Outputs for Injection Attacks Detection Fei Miao Quanyan Zhu Miroslav Pajic George J Pappas
Average-Consensus of Multi-Agent Systems with Direct Topology Based on Event-Triggered Control
 Outline Background Preliminaries Consensus Numerical simulations Conclusions Average-Consensus of Multi-Agent Systems with Direct Topology Based on Event-Triggered Control Email: lzhx@nankai.edu.cn, chenzq@nankai.edu.cn
Outline Background Preliminaries Consensus Numerical simulations Conclusions Average-Consensus of Multi-Agent Systems with Direct Topology Based on Event-Triggered Control Email: lzhx@nankai.edu.cn, chenzq@nankai.edu.cn
Zeno-free, distributed event-triggered communication and control for multi-agent average consensus
 Zeno-free, distributed event-triggered communication and control for multi-agent average consensus Cameron Nowzari Jorge Cortés Abstract This paper studies a distributed event-triggered communication and
Zeno-free, distributed event-triggered communication and control for multi-agent average consensus Cameron Nowzari Jorge Cortés Abstract This paper studies a distributed event-triggered communication and
An Event-Triggered Consensus Control with Sampled-Data Mechanism for Multi-agent Systems
 Preprints of the 19th World Congress The International Federation of Automatic Control An Event-Triggered Consensus Control with Sampled-Data Mechanism for Multi-agent Systems Feng Zhou, Zhiwu Huang, Weirong
Preprints of the 19th World Congress The International Federation of Automatic Control An Event-Triggered Consensus Control with Sampled-Data Mechanism for Multi-agent Systems Feng Zhou, Zhiwu Huang, Weirong
On Equilibria of Distributed Message-Passing Games
 On Equilibria of Distributed Message-Passing Games Concetta Pilotto and K. Mani Chandy California Institute of Technology, Computer Science Department 1200 E. California Blvd. MC 256-80 Pasadena, US {pilotto,mani}@cs.caltech.edu
On Equilibria of Distributed Message-Passing Games Concetta Pilotto and K. Mani Chandy California Institute of Technology, Computer Science Department 1200 E. California Blvd. MC 256-80 Pasadena, US {pilotto,mani}@cs.caltech.edu
OUTPUT CONSENSUS OF HETEROGENEOUS LINEAR MULTI-AGENT SYSTEMS BY EVENT-TRIGGERED CONTROL
 OUTPUT CONSENSUS OF HETEROGENEOUS LINEAR MULTI-AGENT SYSTEMS BY EVENT-TRIGGERED CONTROL Gang FENG Department of Mechanical and Biomedical Engineering City University of Hong Kong July 25, 2014 Department
OUTPUT CONSENSUS OF HETEROGENEOUS LINEAR MULTI-AGENT SYSTEMS BY EVENT-TRIGGERED CONTROL Gang FENG Department of Mechanical and Biomedical Engineering City University of Hong Kong July 25, 2014 Department
Event-Based Control of Nonlinear Systems with Partial State and Output Feedback
 Event-Based Control of Nonlinear Systems with Partial State and Output Feedback Tengfei Liu a, Zhong-Ping Jiang b a State Key Laboratory of Synthetical Automation for Process Industries, Northeastern University,
Event-Based Control of Nonlinear Systems with Partial State and Output Feedback Tengfei Liu a, Zhong-Ping Jiang b a State Key Laboratory of Synthetical Automation for Process Industries, Northeastern University,
Self-Triggering in Nonlinear Systems: A Small-Gain Theorem Approach
 Self-Triggering in Nonlinear Systems: A Small-Gain Theorem Approach Domagoj Tolić, Ricardo G. Sanfelice and Rafael Fierro Abstract This paper investigates stability of nonlinear control systems under intermittent
Self-Triggering in Nonlinear Systems: A Small-Gain Theorem Approach Domagoj Tolić, Ricardo G. Sanfelice and Rafael Fierro Abstract This paper investigates stability of nonlinear control systems under intermittent
On a small gain theorem for ISS networks in dissipative Lyapunov form
 On a small gain theorem for ISS networks in dissipative Lyapunov form Sergey Dashkovskiy, Hiroshi Ito and Fabian Wirth Abstract In this paper we consider several interconnected ISS systems supplied with
On a small gain theorem for ISS networks in dissipative Lyapunov form Sergey Dashkovskiy, Hiroshi Ito and Fabian Wirth Abstract In this paper we consider several interconnected ISS systems supplied with
Australian National University WORKSHOP ON SYSTEMS AND CONTROL
 Australian National University WORKSHOP ON SYSTEMS AND CONTROL Canberra, AU December 7, 2017 Australian National University WORKSHOP ON SYSTEMS AND CONTROL A Distributed Algorithm for Finding a Common
Australian National University WORKSHOP ON SYSTEMS AND CONTROL Canberra, AU December 7, 2017 Australian National University WORKSHOP ON SYSTEMS AND CONTROL A Distributed Algorithm for Finding a Common
Distributed Event-Based Control Strategies for Interconnected Linear Systems
 Distributed Event-Based Control Strategies for Interconnected Linear Systems M. Guinaldo, D. V. Dimarogonas, K. H. Johansson, J. Sánchez, S. Dormido January 9, 213 Abstract This paper presents a distributed
Distributed Event-Based Control Strategies for Interconnected Linear Systems M. Guinaldo, D. V. Dimarogonas, K. H. Johansson, J. Sánchez, S. Dormido January 9, 213 Abstract This paper presents a distributed
Dynamic State Estimation in the Presence of Compromised Sensory Data
 2015 IEEE 54th Annual Conference on Decision and Control (CDC) December 15-18, 2015. Osaka, Japan Dynamic State Estimation in the Presence of Compromised Sensory Data Yorie Nakahira, Yilin Mo Abstract
2015 IEEE 54th Annual Conference on Decision and Control (CDC) December 15-18, 2015. Osaka, Japan Dynamic State Estimation in the Presence of Compromised Sensory Data Yorie Nakahira, Yilin Mo Abstract
MOST control systems are designed under the assumption
 2076 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 53, NO. 9, OCTOBER 2008 Lyapunov-Based Model Predictive Control of Nonlinear Systems Subject to Data Losses David Muñoz de la Peña and Panagiotis D. Christofides
2076 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 53, NO. 9, OCTOBER 2008 Lyapunov-Based Model Predictive Control of Nonlinear Systems Subject to Data Losses David Muñoz de la Peña and Panagiotis D. Christofides
A State-Space Approach to Control of Interconnected Systems
 A State-Space Approach to Control of Interconnected Systems Part II: General Interconnections Cédric Langbort Center for the Mathematics of Information CALIFORNIA INSTITUTE OF TECHNOLOGY clangbort@ist.caltech.edu
A State-Space Approach to Control of Interconnected Systems Part II: General Interconnections Cédric Langbort Center for the Mathematics of Information CALIFORNIA INSTITUTE OF TECHNOLOGY clangbort@ist.caltech.edu
ON SEPARATION PRINCIPLE FOR THE DISTRIBUTED ESTIMATION AND CONTROL OF FORMATION FLYING SPACECRAFT
 ON SEPARATION PRINCIPLE FOR THE DISTRIBUTED ESTIMATION AND CONTROL OF FORMATION FLYING SPACECRAFT Amir Rahmani (), Olivia Ching (2), and Luis A Rodriguez (3) ()(2)(3) University of Miami, Coral Gables,
ON SEPARATION PRINCIPLE FOR THE DISTRIBUTED ESTIMATION AND CONTROL OF FORMATION FLYING SPACECRAFT Amir Rahmani (), Olivia Ching (2), and Luis A Rodriguez (3) ()(2)(3) University of Miami, Coral Gables,
Stabilization of Large-scale Distributed Control Systems using I/O Event-driven Control and Passivity
 11 5th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC) Orlando, FL, USA, December 1-15, 11 Stabilization of Large-scale Distributed Control Systems using I/O Event-driven
11 5th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC) Orlando, FL, USA, December 1-15, 11 Stabilization of Large-scale Distributed Control Systems using I/O Event-driven
FAULT-TOLERANT CONTROL OF CHEMICAL PROCESS SYSTEMS USING COMMUNICATION NETWORKS. Nael H. El-Farra, Adiwinata Gani & Panagiotis D.
 FAULT-TOLERANT CONTROL OF CHEMICAL PROCESS SYSTEMS USING COMMUNICATION NETWORKS Nael H. El-Farra, Adiwinata Gani & Panagiotis D. Christofides Department of Chemical Engineering University of California,
FAULT-TOLERANT CONTROL OF CHEMICAL PROCESS SYSTEMS USING COMMUNICATION NETWORKS Nael H. El-Farra, Adiwinata Gani & Panagiotis D. Christofides Department of Chemical Engineering University of California,
Decentralized Event-Triggering for Control of Nonlinear Systems
 Decentralized Event-Triggering for Control of Nonlinear Systems Pavankumar Tallapragada and Nikhil Chopra arxiv:32.49v3 [cs.sy] 3 Jun 24 Abstract This paper considers nonlinear systems with full state
Decentralized Event-Triggering for Control of Nonlinear Systems Pavankumar Tallapragada and Nikhil Chopra arxiv:32.49v3 [cs.sy] 3 Jun 24 Abstract This paper considers nonlinear systems with full state
Resilient Distributed Optimization Algorithm against Adversary Attacks
 207 3th IEEE International Conference on Control & Automation (ICCA) July 3-6, 207. Ohrid, Macedonia Resilient Distributed Optimization Algorithm against Adversary Attacks Chengcheng Zhao, Jianping He
207 3th IEEE International Conference on Control & Automation (ICCA) July 3-6, 207. Ohrid, Macedonia Resilient Distributed Optimization Algorithm against Adversary Attacks Chengcheng Zhao, Jianping He
On robustness of suboptimal min-max model predictive control *
 Manuscript received June 5, 007; revised Sep., 007 On robustness of suboptimal min-max model predictive control * DE-FENG HE, HAI-BO JI, TAO ZHENG Department of Automation University of Science and Technology
Manuscript received June 5, 007; revised Sep., 007 On robustness of suboptimal min-max model predictive control * DE-FENG HE, HAI-BO JI, TAO ZHENG Department of Automation University of Science and Technology
Decentralized Stabilization of Heterogeneous Linear Multi-Agent Systems
 1 Decentralized Stabilization of Heterogeneous Linear Multi-Agent Systems Mauro Franceschelli, Andrea Gasparri, Alessandro Giua, and Giovanni Ulivi Abstract In this paper the formation stabilization problem
1 Decentralized Stabilization of Heterogeneous Linear Multi-Agent Systems Mauro Franceschelli, Andrea Gasparri, Alessandro Giua, and Giovanni Ulivi Abstract In this paper the formation stabilization problem
NEW SUPERVISORY CONTROL USING CONTROL-RELEVANT SWITCHING
 NEW SUPERVISORY CONTROL USING CONTROL-RELEVANT SWITCHING Tae-Woong Yoon, Jung-Su Kim Dept. of Electrical Engineering. Korea University, Anam-dong 5-ga Seongbuk-gu 36-73, Seoul, Korea, twy@korea.ac.kr,
NEW SUPERVISORY CONTROL USING CONTROL-RELEVANT SWITCHING Tae-Woong Yoon, Jung-Su Kim Dept. of Electrical Engineering. Korea University, Anam-dong 5-ga Seongbuk-gu 36-73, Seoul, Korea, twy@korea.ac.kr,
QUANTIZED SYSTEMS AND CONTROL. Daniel Liberzon. DISC HS, June Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign
 QUANTIZED SYSTEMS AND CONTROL Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign DISC HS, June 2003 HYBRID CONTROL Plant: u y
QUANTIZED SYSTEMS AND CONTROL Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign DISC HS, June 2003 HYBRID CONTROL Plant: u y
The Rationale for Second Level Adaptation
 The Rationale for Second Level Adaptation Kumpati S. Narendra, Yu Wang and Wei Chen Center for Systems Science, Yale University arxiv:1510.04989v1 [cs.sy] 16 Oct 2015 Abstract Recently, a new approach
The Rationale for Second Level Adaptation Kumpati S. Narendra, Yu Wang and Wei Chen Center for Systems Science, Yale University arxiv:1510.04989v1 [cs.sy] 16 Oct 2015 Abstract Recently, a new approach
Pass Balancing Switching Control of a Four-passes Furnace System
 Pass Balancing Switching Control of a Four-passes Furnace System Xingxuan Wang Department of Electronic Engineering, Fudan University, Shanghai 004, P. R. China (el: 86 656496; e-mail: wxx07@fudan.edu.cn)
Pass Balancing Switching Control of a Four-passes Furnace System Xingxuan Wang Department of Electronic Engineering, Fudan University, Shanghai 004, P. R. China (el: 86 656496; e-mail: wxx07@fudan.edu.cn)
Delay-independent stability via a reset loop
 Delay-independent stability via a reset loop S. Tarbouriech & L. Zaccarian (LAAS-CNRS) Joint work with F. Perez Rubio & A. Banos (Universidad de Murcia) L2S Paris, 20-22 November 2012 L2S Paris, 20-22
Delay-independent stability via a reset loop S. Tarbouriech & L. Zaccarian (LAAS-CNRS) Joint work with F. Perez Rubio & A. Banos (Universidad de Murcia) L2S Paris, 20-22 November 2012 L2S Paris, 20-22
Global Stability and Asymptotic Gain Imply Input-to-State Stability for State-Dependent Switched Systems
 2018 IEEE Conference on Decision and Control (CDC) Miami Beach, FL, USA, Dec. 17-19, 2018 Global Stability and Asymptotic Gain Imply Input-to-State Stability for State-Dependent Switched Systems Shenyu
2018 IEEE Conference on Decision and Control (CDC) Miami Beach, FL, USA, Dec. 17-19, 2018 Global Stability and Asymptotic Gain Imply Input-to-State Stability for State-Dependent Switched Systems Shenyu
An event-triggered distributed primal-dual algorithm for Network Utility Maximization
 An event-triggered distributed primal-dual algorithm for Network Utility Maximization Pu Wan and Michael D. Lemmon Abstract Many problems associated with networked systems can be formulated as network
An event-triggered distributed primal-dual algorithm for Network Utility Maximization Pu Wan and Michael D. Lemmon Abstract Many problems associated with networked systems can be formulated as network
Packet-loss Dependent Controller Design for Networked Control Systems via Switched System Approach
 Proceedings of the 47th IEEE Conference on Decision and Control Cancun, Mexico, Dec. 9-11, 8 WeC6.3 Packet-loss Dependent Controller Design for Networked Control Systems via Switched System Approach Junyan
Proceedings of the 47th IEEE Conference on Decision and Control Cancun, Mexico, Dec. 9-11, 8 WeC6.3 Packet-loss Dependent Controller Design for Networked Control Systems via Switched System Approach Junyan
NOWADAYS, many control applications have some control
 1650 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL 49, NO 10, OCTOBER 2004 Input Output Stability Properties of Networked Control Systems D Nešić, Senior Member, IEEE, A R Teel, Fellow, IEEE Abstract Results
1650 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL 49, NO 10, OCTOBER 2004 Input Output Stability Properties of Networked Control Systems D Nešić, Senior Member, IEEE, A R Teel, Fellow, IEEE Abstract Results
Stabilization of Networked Control Systems: Communication and Controller co-design
 Stabilization of Networked Control Systems: Communication and Controller co-design Dimitrios Hristu-Varsakelis Mechanical Engineering and Institute for Systems Research University of Maryland, College
Stabilization of Networked Control Systems: Communication and Controller co-design Dimitrios Hristu-Varsakelis Mechanical Engineering and Institute for Systems Research University of Maryland, College
Consensus-Based Distributed Optimization with Malicious Nodes
 Consensus-Based Distributed Optimization with Malicious Nodes Shreyas Sundaram Bahman Gharesifard Abstract We investigate the vulnerabilities of consensusbased distributed optimization protocols to nodes
Consensus-Based Distributed Optimization with Malicious Nodes Shreyas Sundaram Bahman Gharesifard Abstract We investigate the vulnerabilities of consensusbased distributed optimization protocols to nodes
Learning Model Predictive Control for Iterative Tasks: A Computationally Efficient Approach for Linear System
 Learning Model Predictive Control for Iterative Tasks: A Computationally Efficient Approach for Linear System Ugo Rosolia Francesco Borrelli University of California at Berkeley, Berkeley, CA 94701, USA
Learning Model Predictive Control for Iterative Tasks: A Computationally Efficient Approach for Linear System Ugo Rosolia Francesco Borrelli University of California at Berkeley, Berkeley, CA 94701, USA
University of Groningen. Resilient Control under Denial-of-Service Attacks Feng, Shuai
 University of Groningen Resilient Control under Denial-of-Service Attacks Feng, Shuai IMPORTANT NOTE: You are advised to consult the publisher's version (publisher's PDF) if you wish to cite from it. Please
University of Groningen Resilient Control under Denial-of-Service Attacks Feng, Shuai IMPORTANT NOTE: You are advised to consult the publisher's version (publisher's PDF) if you wish to cite from it. Please
arxiv: v3 [math.ds] 22 Feb 2012
![arxiv: v3 [math.ds] 22 Feb 2012](/thumbs/94/118245451.jpg "arxiv: v3 [math.ds] 22 Feb 2012") Stability of interconnected impulsive systems with and without time-delays using Lyapunov methods arxiv:1011.2865v3 [math.ds] 22 Feb 2012 Sergey Dashkovskiy a, Michael Kosmykov b, Andrii Mironchenko b,
Stability of interconnected impulsive systems with and without time-delays using Lyapunov methods arxiv:1011.2865v3 [math.ds] 22 Feb 2012 Sergey Dashkovskiy a, Michael Kosmykov b, Andrii Mironchenko b,
Bisimilar Finite Abstractions of Interconnected Systems
 Bisimilar Finite Abstractions of Interconnected Systems Yuichi Tazaki and Jun-ichi Imura Tokyo Institute of Technology, Ōokayama 2-12-1, Meguro, Tokyo, Japan {tazaki,imura}@cyb.mei.titech.ac.jp http://www.cyb.mei.titech.ac.jp
Bisimilar Finite Abstractions of Interconnected Systems Yuichi Tazaki and Jun-ichi Imura Tokyo Institute of Technology, Ōokayama 2-12-1, Meguro, Tokyo, Japan {tazaki,imura}@cyb.mei.titech.ac.jp http://www.cyb.mei.titech.ac.jp
A Globally Stabilizing Receding Horizon Controller for Neutrally Stable Linear Systems with Input Constraints 1
 A Globally Stabilizing Receding Horizon Controller for Neutrally Stable Linear Systems with Input Constraints 1 Ali Jadbabaie, Claudio De Persis, and Tae-Woong Yoon 2 Department of Electrical Engineering
A Globally Stabilizing Receding Horizon Controller for Neutrally Stable Linear Systems with Input Constraints 1 Ali Jadbabaie, Claudio De Persis, and Tae-Woong Yoon 2 Department of Electrical Engineering
Control of Multi-Agent Systems via Event-based Communication
 Proceedings of the 8th World Congress The International Federation of Automatic Control Milano (Italy) August 8 - September, Control of Multi-Agent Systems via Event-based Communication Georg S. Seyboth
Proceedings of the 8th World Congress The International Federation of Automatic Control Milano (Italy) August 8 - September, Control of Multi-Agent Systems via Event-based Communication Georg S. Seyboth
Towards control over fading channels
 Towards control over fading channels Paolo Minero, Massimo Franceschetti Advanced Network Science University of California San Diego, CA, USA mail: {minero,massimo}@ucsd.edu Invited Paper) Subhrakanti
Towards control over fading channels Paolo Minero, Massimo Franceschetti Advanced Network Science University of California San Diego, CA, USA mail: {minero,massimo}@ucsd.edu Invited Paper) Subhrakanti
Event-triggered PI control: Saturating actuators and anti-windup compensation
 Event-triggered PI control: Saturating actuators and anti-windup compensation Daniel Lehmann, Georg Aleander Kiener and Karl Henrik Johansson Abstract Event-triggered control aims at reducing the communication
Event-triggered PI control: Saturating actuators and anti-windup compensation Daniel Lehmann, Georg Aleander Kiener and Karl Henrik Johansson Abstract Event-triggered control aims at reducing the communication
Quantifying Cyber Security for Networked Control Systems
 Quantifying Cyber Security for Networked Control Systems Henrik Sandberg ACCESS Linnaeus Centre, KTH Royal Institute of Technology Joint work with: André Teixeira, György Dán, Karl H. Johansson (KTH) Kin
Quantifying Cyber Security for Networked Control Systems Henrik Sandberg ACCESS Linnaeus Centre, KTH Royal Institute of Technology Joint work with: André Teixeira, György Dán, Karl H. Johansson (KTH) Kin
Observer-based quantized output feedback control of nonlinear systems
 Proceedings of the 17th World Congress The International Federation of Automatic Control Observer-based quantized output feedback control of nonlinear systems Daniel Liberzon Coordinated Science Laboratory,
Proceedings of the 17th World Congress The International Federation of Automatic Control Observer-based quantized output feedback control of nonlinear systems Daniel Liberzon Coordinated Science Laboratory,
On Linear Copositive Lyapunov Functions and the Stability of Switched Positive Linear Systems
 1 On Linear Copositive Lyapunov Functions and the Stability of Switched Positive Linear Systems O. Mason and R. Shorten Abstract We consider the problem of common linear copositive function existence for
1 On Linear Copositive Lyapunov Functions and the Stability of Switched Positive Linear Systems O. Mason and R. Shorten Abstract We consider the problem of common linear copositive function existence for
Distributed Randomized Algorithms for the PageRank Computation Hideaki Ishii, Member, IEEE, and Roberto Tempo, Fellow, IEEE
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 55, NO. 9, SEPTEMBER 2010 1987 Distributed Randomized Algorithms for the PageRank Computation Hideaki Ishii, Member, IEEE, and Roberto Tempo, Fellow, IEEE Abstract
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 55, NO. 9, SEPTEMBER 2010 1987 Distributed Randomized Algorithms for the PageRank Computation Hideaki Ishii, Member, IEEE, and Roberto Tempo, Fellow, IEEE Abstract
Input-to-state stability of self-triggered control systems
 Input-to-state stability of self-triggered control systems Manuel Mazo Jr. and Paulo Tabuada Abstract Event-triggered and self-triggered control have recently been proposed as an alternative to periodic
Input-to-state stability of self-triggered control systems Manuel Mazo Jr. and Paulo Tabuada Abstract Event-triggered and self-triggered control have recently been proposed as an alternative to periodic
arxiv: v2 [math.oc] 3 Feb 2011
![arxiv: v2 [math.oc] 3 Feb 2011](/thumbs/73/68992391.jpg "arxiv: v2 [math.oc] 3 Feb 2011") DECENTRALIZED EVENT-TRIGGERED CONTROL OVER WIRELESS SENSOR/ACTUATOR NETWORKS MANUEL MAZO JR AND PAULO TABUADA arxiv:14.477v2 [math.oc] 3 Feb 211 Abstract. In recent years we have witnessed a move of the
DECENTRALIZED EVENT-TRIGGERED CONTROL OVER WIRELESS SENSOR/ACTUATOR NETWORKS MANUEL MAZO JR AND PAULO TABUADA arxiv:14.477v2 [math.oc] 3 Feb 211 Abstract. In recent years we have witnessed a move of the
Networked Control Systems:
 Networked Control Systems: an emulation approach to controller design Dragan Nesic The University of Melbourne Electrical and Electronic Engineering Acknowledgements: My collaborators: A.R. Teel, M. Tabbara,
Networked Control Systems: an emulation approach to controller design Dragan Nesic The University of Melbourne Electrical and Electronic Engineering Acknowledgements: My collaborators: A.R. Teel, M. Tabbara,
Decentralized Channel Access for Wireless Control Systems
 Decentralized Channel Access for Wireless Control Systems Konstantinos Gatsis, Alejandro Ribeiro, George J. Pappas Department of Electrical and Systems Engineering, University of Pennsylvania, 2 South
Decentralized Channel Access for Wireless Control Systems Konstantinos Gatsis, Alejandro Ribeiro, George J. Pappas Department of Electrical and Systems Engineering, University of Pennsylvania, 2 South
AN EVENT-TRIGGERED TRANSMISSION POLICY FOR NETWORKED L 2 -GAIN CONTROL
 4 Journal of Marine Science and echnology, Vol. 3, No., pp. 4-9 () DOI:.69/JMS-3-3-3 AN EVEN-RIGGERED RANSMISSION POLICY FOR NEWORKED L -GAIN CONROL Jenq-Lang Wu, Yuan-Chang Chang, Xin-Hong Chen, and su-ian
4 Journal of Marine Science and echnology, Vol. 3, No., pp. 4-9 () DOI:.69/JMS-3-3-3 AN EVEN-RIGGERED RANSMISSION POLICY FOR NEWORKED L -GAIN CONROL Jenq-Lang Wu, Yuan-Chang Chang, Xin-Hong Chen, and su-ian
On Design of Reduced-Order H Filters for Discrete-Time Systems from Incomplete Measurements
 Proceedings of the 47th IEEE Conference on Decision and Control Cancun, Mexico, Dec. 9-11, 2008 On Design of Reduced-Order H Filters for Discrete-Time Systems from Incomplete Measurements Shaosheng Zhou
Proceedings of the 47th IEEE Conference on Decision and Control Cancun, Mexico, Dec. 9-11, 2008 On Design of Reduced-Order H Filters for Discrete-Time Systems from Incomplete Measurements Shaosheng Zhou
Information in Aloha Networks
 Achieving Proportional Fairness using Local Information in Aloha Networks Koushik Kar, Saswati Sarkar, Leandros Tassiulas Abstract We address the problem of attaining proportionally fair rates using Aloha
Achieving Proportional Fairness using Local Information in Aloha Networks Koushik Kar, Saswati Sarkar, Leandros Tassiulas Abstract We address the problem of attaining proportionally fair rates using Aloha
Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL VOL. 56 NO. 3 MARCH 2011 655 Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays Nikolaos Bekiaris-Liberis Miroslav Krstic In this case system
IEEE TRANSACTIONS ON AUTOMATIC CONTROL VOL. 56 NO. 3 MARCH 2011 655 Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays Nikolaos Bekiaris-Liberis Miroslav Krstic In this case system
Target Localization and Circumnavigation Using Bearing Measurements in 2D
 Target Localization and Circumnavigation Using Bearing Measurements in D Mohammad Deghat, Iman Shames, Brian D. O. Anderson and Changbin Yu Abstract This paper considers the problem of localization and
Target Localization and Circumnavigation Using Bearing Measurements in D Mohammad Deghat, Iman Shames, Brian D. O. Anderson and Changbin Yu Abstract This paper considers the problem of localization and
Event-based control of input-output linearizable systems
 Milano (Italy) August 28 - September 2, 2 Event-based control of input-output linearizable systems Christian Stöcker Jan Lunze Institute of Automation and Computer Control, Ruhr-Universität Bochum, Universitätsstr.
Milano (Italy) August 28 - September 2, 2 Event-based control of input-output linearizable systems Christian Stöcker Jan Lunze Institute of Automation and Computer Control, Ruhr-Universität Bochum, Universitätsstr.
Stability of Hybrid Control Systems Based on Time-State Control Forms
 Stability of Hybrid Control Systems Based on Time-State Control Forms Yoshikatsu HOSHI, Mitsuji SAMPEI, Shigeki NAKAURA Department of Mechanical and Control Engineering Tokyo Institute of Technology 2
Stability of Hybrid Control Systems Based on Time-State Control Forms Yoshikatsu HOSHI, Mitsuji SAMPEI, Shigeki NAKAURA Department of Mechanical and Control Engineering Tokyo Institute of Technology 2
Feedback Control CONTROL THEORY FUNDAMENTALS. Feedback Control: A History. Feedback Control: A History (contd.) Anuradha Annaswamy
 Anuradha Annaswamy") Feedback Control CONTROL THEORY FUNDAMENTALS Actuator Sensor + Anuradha Annaswamy Active adaptive Control Laboratory Massachusetts Institute of Technology must follow with» Speed» Accuracy Feeback: Measure
Feedback Control CONTROL THEORY FUNDAMENTALS Actuator Sensor + Anuradha Annaswamy Active adaptive Control Laboratory Massachusetts Institute of Technology must follow with» Speed» Accuracy Feeback: Measure
Robust Connectivity Analysis for Multi-Agent Systems
 Robust Connectivity Analysis for Multi-Agent Systems Dimitris Boskos and Dimos V. Dimarogonas Abstract In this paper we provide a decentralized robust control approach, which guarantees that connectivity
Robust Connectivity Analysis for Multi-Agent Systems Dimitris Boskos and Dimos V. Dimarogonas Abstract In this paper we provide a decentralized robust control approach, which guarantees that connectivity
IMPULSIVE CONTROL OF DISCRETE-TIME NETWORKED SYSTEMS WITH COMMUNICATION DELAYS. Shumei Mu, Tianguang Chu, and Long Wang
 IMPULSIVE CONTROL OF DISCRETE-TIME NETWORKED SYSTEMS WITH COMMUNICATION DELAYS Shumei Mu Tianguang Chu and Long Wang Intelligent Control Laboratory Center for Systems and Control Department of Mechanics
IMPULSIVE CONTROL OF DISCRETE-TIME NETWORKED SYSTEMS WITH COMMUNICATION DELAYS Shumei Mu Tianguang Chu and Long Wang Intelligent Control Laboratory Center for Systems and Control Department of Mechanics
LMI-Based Synthesis for Distributed Event-Based State Estimation
 LMI-Based Synthesis for Distributed Event-Based State Estimation Michael Muehlebach 1 and Sebastian Trimpe Abstract This paper presents an LMI-based synthesis procedure for distributed event-based state
LMI-Based Synthesis for Distributed Event-Based State Estimation Michael Muehlebach 1 and Sebastian Trimpe Abstract This paper presents an LMI-based synthesis procedure for distributed event-based state
Convergence Rate for Consensus with Delays
 Convergence Rate for Consensus with Delays Angelia Nedić and Asuman Ozdaglar October 8, 2007 Abstract We study the problem of reaching a consensus in the values of a distributed system of agents with time-varying
Convergence Rate for Consensus with Delays Angelia Nedić and Asuman Ozdaglar October 8, 2007 Abstract We study the problem of reaching a consensus in the values of a distributed system of agents with time-varying
Chapter 7 Distributed Event-Based Control for Interconnected Linear Systems
 Chapter 7 Distributed Event-Based Control for Interconnected Linear Systems María Guinaldo, Dimos V. Dimarogonas, Daniel Lehmann and Karl H. Johansson 7.1 Introduction One way to study the control properties
Chapter 7 Distributed Event-Based Control for Interconnected Linear Systems María Guinaldo, Dimos V. Dimarogonas, Daniel Lehmann and Karl H. Johansson 7.1 Introduction One way to study the control properties
NETWORKED control systems (NCS), that are comprised
, that are comprised") 1 Event-Triggered H Control: a Switching Approach Anton Selivanov and Emilia Fridman, Senior Member, IEEE Abstract Event-triggered approach to networked control systems is used to reduce the workload of
1 Event-Triggered H Control: a Switching Approach Anton Selivanov and Emilia Fridman, Senior Member, IEEE Abstract Event-triggered approach to networked control systems is used to reduce the workload of
arxiv: v1 [cs.sy] 30 Sep 2015
![arxiv: v1 [cs.sy] 30 Sep 2015](/thumbs/85/91698511.jpg "arxiv: v1 [cs.sy] 30 Sep 2015") Optimal Sensor Scheduling and Remote Estimation over an Additive Noise Channel Xiaobin Gao, Emrah Akyol, and Tamer Başar arxiv:1510.00064v1 cs.sy 30 Sep 015 Abstract We consider a sensor scheduling and
Optimal Sensor Scheduling and Remote Estimation over an Additive Noise Channel Xiaobin Gao, Emrah Akyol, and Tamer Başar arxiv:1510.00064v1 cs.sy 30 Sep 015 Abstract We consider a sensor scheduling and
NONLINEAR CONTROL with LIMITED INFORMATION. Daniel Liberzon
 NONLINEAR CONTROL with LIMITED INFORMATION Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign Plenary talk, 2 nd Indian Control
NONLINEAR CONTROL with LIMITED INFORMATION Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign Plenary talk, 2 nd Indian Control
Distributed Receding Horizon Control of Cost Coupled Systems
 Distributed Receding Horizon Control of Cost Coupled Systems William B. Dunbar Abstract This paper considers the problem of distributed control of dynamically decoupled systems that are subject to decoupled
Distributed Receding Horizon Control of Cost Coupled Systems William B. Dunbar Abstract This paper considers the problem of distributed control of dynamically decoupled systems that are subject to decoupled
Hybrid Systems Course Lyapunov stability
 Hybrid Systems Course Lyapunov stability OUTLINE Focus: stability of an equilibrium point continuous systems decribed by ordinary differential equations (brief review) hybrid automata OUTLINE Focus: stability
Hybrid Systems Course Lyapunov stability OUTLINE Focus: stability of an equilibrium point continuous systems decribed by ordinary differential equations (brief review) hybrid automata OUTLINE Focus: stability
A Simple Self-triggered Sampler for Nonlinear Systems
 Proceedings of the 4th IFAC Conference on Analysis and Design of Hybrid Systems ADHS 12 June 6-8, 212. A Simple Self-triggered Sampler for Nonlinear Systems U. Tiberi, K.H. Johansson, ACCESS Linnaeus Center,
Proceedings of the 4th IFAC Conference on Analysis and Design of Hybrid Systems ADHS 12 June 6-8, 212. A Simple Self-triggered Sampler for Nonlinear Systems U. Tiberi, K.H. Johansson, ACCESS Linnaeus Center,
Hybrid Systems Techniques for Convergence of Solutions to Switching Systems
 Hybrid Systems Techniques for Convergence of Solutions to Switching Systems Rafal Goebel, Ricardo G. Sanfelice, and Andrew R. Teel Abstract Invariance principles for hybrid systems are used to derive invariance
Hybrid Systems Techniques for Convergence of Solutions to Switching Systems Rafal Goebel, Ricardo G. Sanfelice, and Andrew R. Teel Abstract Invariance principles for hybrid systems are used to derive invariance
Small Gain Theorems on Input-to-Output Stability
 Small Gain Theorems on Input-to-Output Stability Zhong-Ping Jiang Yuan Wang. Dept. of Electrical & Computer Engineering Polytechnic University Brooklyn, NY 11201, U.S.A. zjiang@control.poly.edu Dept. of
Small Gain Theorems on Input-to-Output Stability Zhong-Ping Jiang Yuan Wang. Dept. of Electrical & Computer Engineering Polytechnic University Brooklyn, NY 11201, U.S.A. zjiang@control.poly.edu Dept. of
Gramians based model reduction for hybrid switched systems
 Gramians based model reduction for hybrid switched systems Y. Chahlaoui Younes.Chahlaoui@manchester.ac.uk Centre for Interdisciplinary Computational and Dynamical Analysis (CICADA) School of Mathematics
Gramians based model reduction for hybrid switched systems Y. Chahlaoui Younes.Chahlaoui@manchester.ac.uk Centre for Interdisciplinary Computational and Dynamical Analysis (CICADA) School of Mathematics
FINITE HORIZON ROBUST MODEL PREDICTIVE CONTROL USING LINEAR MATRIX INEQUALITIES. Danlei Chu, Tongwen Chen, Horacio J. Marquez
 FINITE HORIZON ROBUST MODEL PREDICTIVE CONTROL USING LINEAR MATRIX INEQUALITIES Danlei Chu Tongwen Chen Horacio J Marquez Department of Electrical and Computer Engineering University of Alberta Edmonton
FINITE HORIZON ROBUST MODEL PREDICTIVE CONTROL USING LINEAR MATRIX INEQUALITIES Danlei Chu Tongwen Chen Horacio J Marquez Department of Electrical and Computer Engineering University of Alberta Edmonton
Performance of Round Robin Policies for Dynamic Multichannel Access
 Performance of Round Robin Policies for Dynamic Multichannel Access Changmian Wang, Bhaskar Krishnamachari, Qing Zhao and Geir E. Øien Norwegian University of Science and Technology, Norway, {changmia,
Performance of Round Robin Policies for Dynamic Multichannel Access Changmian Wang, Bhaskar Krishnamachari, Qing Zhao and Geir E. Øien Norwegian University of Science and Technology, Norway, {changmia,
A small-gain type stability criterion for large scale networks of ISS systems
 A small-gain type stability criterion for large scale networks of ISS systems Sergey Dashkovskiy Björn Sebastian Rüffer Fabian R. Wirth Abstract We provide a generalized version of the nonlinear small-gain
A small-gain type stability criterion for large scale networks of ISS systems Sergey Dashkovskiy Björn Sebastian Rüffer Fabian R. Wirth Abstract We provide a generalized version of the nonlinear small-gain
Networked Control System Protocols Modeling & Analysis using Stochastic Impulsive Systems
 Networked Control System Protocols Modeling & Analysis using Stochastic Impulsive Systems João P. Hespanha Center for Control Dynamical Systems and Computation Talk outline Examples feedback over shared
Networked Control System Protocols Modeling & Analysis using Stochastic Impulsive Systems João P. Hespanha Center for Control Dynamical Systems and Computation Talk outline Examples feedback over shared
QSR-Dissipativity and Passivity Analysis of Event-Triggered Networked Control Cyber-Physical Systems
 QSR-Dissipativity and Passivity Analysis of Event-Triggered Networked Control Cyber-Physical Systems arxiv:1607.00553v1 [math.oc] 2 Jul 2016 Technical Report of the ISIS Group at the University of Notre
QSR-Dissipativity and Passivity Analysis of Event-Triggered Networked Control Cyber-Physical Systems arxiv:1607.00553v1 [math.oc] 2 Jul 2016 Technical Report of the ISIS Group at the University of Notre
On queueing in coded networks queue size follows degrees of freedom
 On queueing in coded networks queue size follows degrees of freedom Jay Kumar Sundararajan, Devavrat Shah, Muriel Médard Laboratory for Information and Decision Systems, Massachusetts Institute of Technology,
On queueing in coded networks queue size follows degrees of freedom Jay Kumar Sundararajan, Devavrat Shah, Muriel Médard Laboratory for Information and Decision Systems, Massachusetts Institute of Technology,
Optimal Decentralized Control of Coupled Subsystems With Control Sharing
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 58, NO. 9, SEPTEMBER 2013 2377 Optimal Decentralized Control of Coupled Subsystems With Control Sharing Aditya Mahajan, Member, IEEE Abstract Subsystems that
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 58, NO. 9, SEPTEMBER 2013 2377 Optimal Decentralized Control of Coupled Subsystems With Control Sharing Aditya Mahajan, Member, IEEE Abstract Subsystems that
Decentralized Channel Access for Wireless Control Systems
 Decentralized Channel Access for Wireless Control Systems Konstantinos Gatsis, Alejandro Ribeiro, George J. Pappas Department of Electrical and Systems Engineering, University of Pennsylvania, 2 South
Decentralized Channel Access for Wireless Control Systems Konstantinos Gatsis, Alejandro Ribeiro, George J. Pappas Department of Electrical and Systems Engineering, University of Pennsylvania, 2 South
LMI Methods in Optimal and Robust Control
 LMI Methods in Optimal and Robust Control Matthew M. Peet Arizona State University Lecture 20: LMI/SOS Tools for the Study of Hybrid Systems Stability Concepts There are several classes of problems for
LMI Methods in Optimal and Robust Control Matthew M. Peet Arizona State University Lecture 20: LMI/SOS Tools for the Study of Hybrid Systems Stability Concepts There are several classes of problems for
Robust Event-Triggered Control Subject to External Disturbance
 Robust Event-Triggered Control Subject to External Disturbance Pengpeng Zhang Tengfei Liu Zhong-Ping Jiang State Key Laboratory of Synthetical Automation for Process Industries, Northeastern University,
Robust Event-Triggered Control Subject to External Disturbance Pengpeng Zhang Tengfei Liu Zhong-Ping Jiang State Key Laboratory of Synthetical Automation for Process Industries, Northeastern University,
Distributed Optimization over Networks Gossip-Based Algorithms
 Distributed Optimization over Networks Gossip-Based Algorithms Angelia Nedić angelia@illinois.edu ISE Department and Coordinated Science Laboratory University of Illinois at Urbana-Champaign Outline Random
Distributed Optimization over Networks Gossip-Based Algorithms Angelia Nedić angelia@illinois.edu ISE Department and Coordinated Science Laboratory University of Illinois at Urbana-Champaign Outline Random
Adaptive Self-triggered Control of a Remotely Operated Robot
 Adaptive Self-triggered Control of a Remotely Operated Robot Carlos Santos 1, Manuel Mazo Jr. 23, and Felipe Espinosa 1 1 Electronics Department, University of Alcala (Spain). 2 INCAS3, Assen (The Netherlands),
Adaptive Self-triggered Control of a Remotely Operated Robot Carlos Santos 1, Manuel Mazo Jr. 23, and Felipe Espinosa 1 1 Electronics Department, University of Alcala (Spain). 2 INCAS3, Assen (The Netherlands),
THE field of cyber-physical systems (CPS) and, in particular,
 and, in particular,") IEEE TRANSACTIONS ON CONTROL OF NETWORK SYSTEMS, VOL. 4, NO., MARCH 27 93 Event-Triggered Control Systems Under Denial-of-Service Attacks V. S. Dolk, P. Tesi, C. De Persis, and W. P. M. H. Heemels, Fellow,
IEEE TRANSACTIONS ON CONTROL OF NETWORK SYSTEMS, VOL. 4, NO., MARCH 27 93 Event-Triggered Control Systems Under Denial-of-Service Attacks V. S. Dolk, P. Tesi, C. De Persis, and W. P. M. H. Heemels, Fellow,
Dynamic Power Allocation and Routing for Time Varying Wireless Networks
 Dynamic Power Allocation and Routing for Time Varying Wireless Networks X 14 (t) X 12 (t) 1 3 4 k a P ak () t P a tot X 21 (t) 2 N X 2N (t) X N4 (t) µ ab () rate µ ab µ ab (p, S 3 ) µ ab µ ac () µ ab (p,
Dynamic Power Allocation and Routing for Time Varying Wireless Networks X 14 (t) X 12 (t) 1 3 4 k a P ak () t P a tot X 21 (t) 2 N X 2N (t) X N4 (t) µ ab () rate µ ab µ ab (p, S 3 ) µ ab µ ac () µ ab (p,
Controllers design for two interconnected systems via unbiased observers
 Preprints of the 19th World Congress The nternational Federation of Automatic Control Cape Town, South Africa. August 24-29, 214 Controllers design for two interconnected systems via unbiased observers
Preprints of the 19th World Congress The nternational Federation of Automatic Control Cape Town, South Africa. August 24-29, 214 Controllers design for two interconnected systems via unbiased observers
Graph and Controller Design for Disturbance Attenuation in Consensus Networks
 203 3th International Conference on Control, Automation and Systems (ICCAS 203) Oct. 20-23, 203 in Kimdaejung Convention Center, Gwangju, Korea Graph and Controller Design for Disturbance Attenuation in
203 3th International Conference on Control, Automation and Systems (ICCAS 203) Oct. 20-23, 203 in Kimdaejung Convention Center, Gwangju, Korea Graph and Controller Design for Disturbance Attenuation in
A POMDP Framework for Cognitive MAC Based on Primary Feedback Exploitation
 A POMDP Framework for Cognitive MAC Based on Primary Feedback Exploitation Karim G. Seddik and Amr A. El-Sherif 2 Electronics and Communications Engineering Department, American University in Cairo, New
A POMDP Framework for Cognitive MAC Based on Primary Feedback Exploitation Karim G. Seddik and Amr A. El-Sherif 2 Electronics and Communications Engineering Department, American University in Cairo, New
Dynamic Games with Asymmetric Information: Common Information Based Perfect Bayesian Equilibria and Sequential Decomposition
 Dynamic Games with Asymmetric Information: Common Information Based Perfect Bayesian Equilibria and Sequential Decomposition 1 arxiv:1510.07001v1 [cs.gt] 23 Oct 2015 Yi Ouyang, Hamidreza Tavafoghi and
Dynamic Games with Asymmetric Information: Common Information Based Perfect Bayesian Equilibria and Sequential Decomposition 1 arxiv:1510.07001v1 [cs.gt] 23 Oct 2015 Yi Ouyang, Hamidreza Tavafoghi and
Event-triggered Control for Discrete-Time Systems
 Event-triggered Control for Discrete-Time Systems Alina Eqtami, Dimos V. Dimarogonas and Kostas J. Kyriakopoulos Abstract In this paper, event-triggered strategies for control of discrete-time systems
Event-triggered Control for Discrete-Time Systems Alina Eqtami, Dimos V. Dimarogonas and Kostas J. Kyriakopoulos Abstract In this paper, event-triggered strategies for control of discrete-time systems
arxiv: v2 [math.ds] 6 Dec 2012
![arxiv: v2 [math.ds] 6 Dec 2012](/thumbs/95/123615903.jpg "arxiv: v2 [math.ds] 6 Dec 2012") On Single-Input Controllable Linear Systems Under Periodic DoS Jamming Attacks Hamed Shisheh Foroush and Sonia Martínez arxiv:94v [mathds] 6 Dec Abstract In this paper, we study remotely-controlled single-input
On Single-Input Controllable Linear Systems Under Periodic DoS Jamming Attacks Hamed Shisheh Foroush and Sonia Martínez arxiv:94v [mathds] 6 Dec Abstract In this paper, we study remotely-controlled single-input
An asymptotic ratio characterization of input-to-state stability
 1 An asymptotic ratio characterization of input-to-state stability Daniel Liberzon and Hyungbo Shim Abstract For continuous-time nonlinear systems with inputs, we introduce the notion of an asymptotic
1 An asymptotic ratio characterization of input-to-state stability Daniel Liberzon and Hyungbo Shim Abstract For continuous-time nonlinear systems with inputs, we introduce the notion of an asymptotic
Triggering mechanism using freely selected sensors for linear time-invariant systems
 Triggering mechanism using freely selected sensors for linear time-invariant systems Romain Postoyan and Antoine Girard Abstract Eisting event-triggering sampling techniques for state feedback controllers
Triggering mechanism using freely selected sensors for linear time-invariant systems Romain Postoyan and Antoine Girard Abstract Eisting event-triggering sampling techniques for state feedback controllers