Random Fields in Bayesian Inference: Effects of the Random Field Discretization
|
|
|
- Camron Shepherd
- 5 years ago
- Views:
Transcription
1 Random Fields in Bayesian Inference: Effects of the Random Field Discretization Felipe Uribe a, Iason Papaioannou a, Wolfgang Betz a, Elisabeth Ullmann b, Daniel Straub a a Engineering Risk Analysis Group, Technische Universität München, 8 München, Germany. b Chair of Numerical Analysis, Technische Universität München, 878 Garching, Germany. {felipe.uribe, iason.papaioannou, wolfgang.betz, elisabeth.ullmann, straub}@tum.de Abstract: Probabilistic analysis of engineering systems often requires models that account for the random spatial variability of their parameters. Information about a target set of parameters can be obtained using mathematical models in combination with observational data. Bayesian inference handles this task by computing a posterior probability distribution that quantifies the combined effects of prior knowledge and observations. However, the compleity of the inference process is increased when the spatial variation of the parameters is considered. Spatially variable quantities are usually modeled by random fields that are discretized with a high number of random variables. In this paper, the challenge is addressed by representing the random field with the Karhunen-Loève epansion with the purpose of evaluating its effects on the outcome of the Bayesian inference. To this end, the influence of the number of terms in the epansion and the correlation length of the prior random field are assessed. The analytical study is carried out on a cantilever beam with spatially variable fleibility. We show that it requires more terms in the series epansion to identify the fleibility random field with the same accuracy as the deflection solution. Furthermore, the decay of the variance error when estimating the posterior fleibility is slower than in the posterior deflection. Introduction In order to realistically model the behavior of engineering systems, uncertainties in material properties and loading conditions must be taken into account. Monitoring and other observational data can be used in combination with mathematical models to obtain information on uncertain parameters. Bayesian inference provides a framework to deal with this task by specifying a prior probability distribution for the uncertain parameters and a likelihood function for the representation of the data. The Bayesian inference process is often carried out numerically since analytical solutions are difficult to compute in most cases. The computational cost involved in the updating process is usually high, primarily because the underlying deterministic model needs to be solved many times. An additional level of compleity is included if the random spatial variability of the model parameters is considered. The spatial variation is generally modeled using random fields, whose parameter space contains an infinite number of elements describing the uncertain quantity at each point of the continuous domain of the system []. A major issue is the proper representation of spatially variable quantities with random fields defined by a finite number of random variables. Therefore, random field discretization methods are applied to reduce the dimensionality of the original random field and to obtain more tractable computations.
2 A detailed investigation of the effects of the random field discretization on the Bayesian inference has not been conducted so far [9]. Among the several eisting methods for random field discretization, the Karhunen-Loève epansion is especially suitable to perform Bayesian inference on random fields, as it often leads to efficient representations with small numbers of random variables. The present contribution uses this method to parametrize the random field so that the inference can be carried out on the random variables arising from the representation. By varying the number of terms in the epansion, a dependence of the dimensionality on the prior and likelihood can be established in order to evaluate its impact on the posterior solution. Furthermore, a study about the influence of the correlation length of the prior random field on the posterior statistics is also provided. In this way, different prior random field assumptions are incorporated into the inference process. These aspects are investigated in the learning of the fleibility of a cantilever beam based on measurements of the displacement along its length. The advantage of this eample lies in the possibility to derive closed-form epressions of the posterior random field. This analytical representation allows us to efficiently carry out an error analysis in order to evaluate how the Karhunen-Loève discretization of the prior random field influences the posterior statistics. Modeling and Discretization of Random Fields. Overview Random fields are mathematical models used to represent phenomena in which the quantity of interest fluctuates discretely or continuously through space in a non-deterministic pattern. Traditional applications of random fields include materials properties with random spatial variability, geometrical imperfections, among others. Let (Ω, F, P ) be a probability space and ξ Ω a random event. A random field [] can be understood as an indeed collection of random variables {H(, ξ) : D} representing the evolution of uncertain values that are spatial coordinates on some bounded domain D R d. A random field is said to be Gaussian if all finite-dimensional distributions of the set of random variables {H(, ξ) : D} are Gaussian []. Gaussian random fields are completely characterized by their first- and second-order moments, i.e., the mean function µ H () : D R and the autocovariance function C HH (, ) : D D R = σ H ()σ H ( )ρ HH (, ), where σ H () and ρ HH (, ) are the standard deviation and autocorrelation coefficient functions of the random field, respectively []. The parameter space of a random field usually contains an infinite number of elements []. For the numerical representation, random fields must be approimated in terms of a finite set of random variables using stochastic discretization methods. According to the underlying probability distribution of the random field, those methods can be grouped in two categories: those that seek the representation of Gaussian random fields and those that deal with non- Gaussian ones. Particularly, several methods have been proposed over the past decades for the representation of Gaussian random fields []. Among the different alternatives, the so-called series epansion methods [7] represent the random field as a finite series epansion of random variables and deterministic functions. This contribution focuses on this approach, and more precisely on the Karhunen-Loève epansion, which is introduced net.. Karhunen-Loève Epansion Consider a real-valued random field H(, ξ) with mean µ H () and autocovariance function C HH (, ). It can be proved that the autocovariance function is symmetric, bounded and positive semi-definite []. Under these conditions, H(, ξ) can be approimated by Ĥ(, ξ) using a linear combination of orthogonal functions resulting from the spectral decomposition of a certain
3 integral operator with the autocovariance function as kernel. This representation is known as the Karhunen-Loève (K-L) epansion [] and is epressed after truncating the series at the M-th term as, M H(, ξ) Ĥ(, ξ) = µ H() + λk φ k ()θ k (ξ), () where, {θ k (ξ)} is a set of mutually uncorrelated random variables with zero mean and unit variance (i.e. E[θ k (ξ)] = and E[θ k (ξ)θ l (ξ)] = δ kl ), and λ k [, ) and φ k () : D R are the eigenvalues and eigenfunctions of the associated integral operator of the autocovariance function. It is assumed that the eigenvalues are arranged in a non-increasing sequence []. The set of eigenpairs {λ k, φ k } is obtained through the solution of the homogeneous Fredholm integral equation of the second kind [], C D HH(, )φ k ( )d = λ k φ k (), for which analytical solutions eist only for specific cases of autocovariance functions [6]. In general, the solution must be estimated numerically, e.g., by approimating the eigenfunctions as a linear combination of complete basis functions []. The approimation error arising from the K-L discretization can be quantified by means of different types of measures. This allows one to evaluate the number of terms in the epansion that must be included in the series to achieve certain error margins. For instance, the local approimation is usually quantified in terms of the mean squared error E[(H(, ξ) Ĥ(, ξ)) ]. Another alternative is to consider global error measures that average local pointwise errors over the domain []. These measures are functions of the number of terms in the K-L epansion and are defined by the relative errors of the mean and variance, given respectively by the following weighted integrals (where D = d): D ε µ (M) = D D k= E[H(, ξ)] E[Ĥ(, ξ)] E[H(, ξ)] d, ε σ(m) = D D Var[H(, ξ)] Var[Ĥ(, ξ)] Var[H(, ξ)] d. () Inverse Problems and Bayesian Inference In science and engineering, the estimation of uncertain model parameters based on indirect observations is a common task. These type of inferences are known as inverse problems []. The goal is to find a set of parameters such that, ỹ y = g(θ), where g : R M R m is the model or observation function which describes the relationship between the data ỹ R m and the model parameters θ R M. When the relationship between ỹ and θ is linear and deterministic, the model observation can be simply obtained as the solution of the system of equations y = Aθ, where A R m M is called the observation matri []. In real applications, the measured quantity ỹ always contains some noise representing the natural discrepancy between the model and the available data. Thus, the classical linear inverse problem is generally written in the form, ỹ = Aθ + ε, where the noise ε R m is generally assumed to be independent of θ and has a certain joint probability density function f ε. There eists several approaches for computing the solution of inverse problems. One class of methods determines point estimates of the quantities of interest based on the available data, e.g., regularization techniques []. Another common approach is the Bayesian framework [, ], which is the focus of this paper and is briefly described in the following. Let θ be a set of uncertain variables and suppose that a set of observed or measured data points ỹ are given. Using Bayes theorem, the belief about θ can be updated by, f (θ ỹ) = f (ỹ θ) f (θ), f (ỹ)
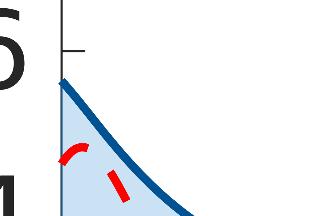
4 where the prior distribution f (θ) represents the initial knowledge about the parameters before performing any measurement; the likelihood function L (θ) = f (ỹ θ) is a measure of the plausability of observing data ỹ conditional on the parameter vector θ; the model evidence c E = f (ỹ) = f (ỹ θ) f (θ) dθ acts as a normalizing constant; and the posterior distribution f (θ ỹ) represents the updated belief about θ after performing the measurement ỹ []. The resulting posterior probability distribution is the solution of the inverse problem. Eample Problem. Eact Prior and Posterior Solution In this study, the spatially variable fleibility F () of a cantilever beam is updated [8]. The beam has length L = m and is subjected to a deterministic point load P = kn at the free end, as shown in Figure. A set of m = deflection measurements is taken at equally spaced points = {.,.,..., } of the domain. Figure : Cantilever beam: True and measured deflection. The measurements are generated by simulation assuming a true (but in real applications unknown) deflection of the beam. The fleibility is defined as the reciprocal of the bending rigidity of the beam, i.e. F () = /(E()I), where E() is the Young s modulus and I is the moment of inertia. The prior distribution of F () is described by a homogeneous Gaussian random field with mean µ F = 7 N m and eponential autocovariance kernel, C F F (, ) = σ F ep ( l F ), with standard deviation σ F =. 8 N m and correlation length l F = m. The associated prior mean and autocovariance functions of the deflection w() can be evaluated using the prior information about F () and assuming an Euler-Bernoulli beam model. As F () is Gaussian and w() is a linear function of F (), the prior distribution of w() is also Gaussian []. The bending moment M() is epressed in terms of the deflection w() as, M() = E()I d w() d = M()F () = d w() d. () Integrating Eq. twice and noting that the bending moment of the cantilever beam can be simply calculated as M() = P (L ), an analytical epression for the deflection (to be used as the observation function in the Bayesian inverse setting) can be obtained by solving the following equation, w(, F ) = P s (L t)f (t) dtds. ()
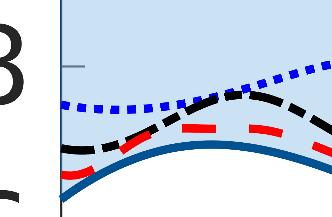
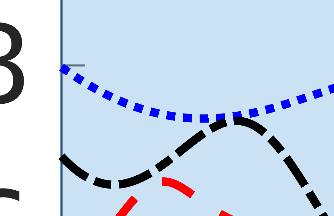
5 Consequently, the mean of w() can be computed using µ F () as, µ w () = P s (L t)µ F (t) dtds = P µ F 6 (L ) and similarly, the autocovariance function of w() can be deduced using C F F (, ) as the solution of the following quadruple integral (which can be computed analytically): C ww (, ) = P σ F s s ( (L t)(l t ) ep t ) t l F dt dt ds ds. The mean and autocovariance functions for each prior random field are shown in Figure. -7. Mean of fleibility Mean of deflection µf(). µw() CFF(, ) 8 6 Autocovariance of fleibility -.8 Autocovariance of deflection - Cww(, ) Figure : Mean and autocovariance functions of the prior fleibility and prior deflection random fields (l F = ). It is assumed that the measurements are subjected to an additive noise which is described by a joint Gaussian PDF f ε with zero mean vector µ ε = [,..., ] and covariance matri with components Σ εε (i, j) = σε ep ( i j /l ε ) for i, j =,..., m. The standard deviation of the measurement error is σ ε =. m and its correlation length l ε = m. These considerations yield a Gaussian likelihood function [8]. Since the prior and likelihood functions are modeled as Gaussian, the posterior distribution will also be Gaussian []. Now, assume the vectors of Gaussian random variables [F, w] and [w, w], where F and w correspond to the fleibility and the deflection at a discrete number of spatial points. Note that the mean vectors and covariance matrices of the formed random vectors can be partitioned accordingly in terms of the individual and crossed components []. Hence, the eact posterior of the fleibility f (F w) and the deflection f (w w) can be calculated analytically as conditional PDFs from their corresponding joint PDFs using Bayes theorem (see [] for further details). These posterior random fields given by multivariate Gaussian distributions have the following mean and autocovariance parameters, µ F w = µ F + Σ F w Σ w w ( w µ w ) µ w w = µ w + Σ w w Σ w w ( w µ w ) Σ F F w = Σ F F Σ F w Σ w wσ T F w () Σ ww w = Σ ww Σ w w Σ w wσ T w w, (6)
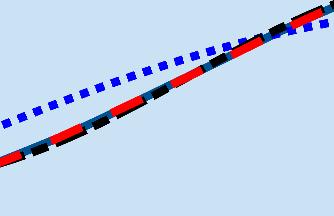
6 where most of the quantities are known from the prior random fields and it can be seen that Σ w w = Σ ww + Σ εε, Σ w w = Σ ww and the covariance matri Σ F w is obtained by computing the corresponding covariance function C F w (, ) = P σ s (L t)c F F F(, t) dtds on a given, D. Figure shows the eact mean and autocovariance functions for each posterior random field. µ F w () Mean of fleibility Autocovariance of fleibility -6 C FF w (, ) µ w w () Mean of deflection -.8 Autocovariance of deflection -7 Figure : Eact mean and autocovariance functions of the posterior fleibility and deflection random fields (l F = ). C ww w (, ) 8 6. Approimated Posterior Solution Using the K-L Epansion The K-L epansion of the prior fleibility random field (Eq. ) can be replaced into the forward model (Eq. ) to obtain, w(, θ) = s [ M ] P (L t) µ F (t) + σ F λk φ k (t)θ k dtds = µ w () + P σ F k= M k= Φ k () λ k θ k with, Φ k () = form as, s (L t)φ k(t) dtds. Alternatively, this equation can be epressed in matri w = µ w + ΦΛθ = µ w + Aθ where the matri Λ = P σ F diag( λ) R M M (λ is the vector of eigenvalues), the matri Φ R n M is computed by the solution of Φ k () evaluated at a given partition of the domain = [,,..., n ] D = [, L] (for k =,..., M), and the mean vector µ w R n is given by the prior mean deflection evaluated in such a partition. Notice that Φ k () can be solved numerically given that the eigenpairs of the target autocovariance kernel are available. However, since the eponential autocovariance kernel has closed-form solution for its eigenpairs [], the double integral Φ k () can be solved analytically. Now, proceeding in a similar way to the eact posterior case, we assume a Gaussian random vector composed by the two random vectors θ and w. Again, the posterior distribution can be calculated as the conditional PDF of θ given w from the joint PDF f (θ, w) using the Bayes theorem [], then
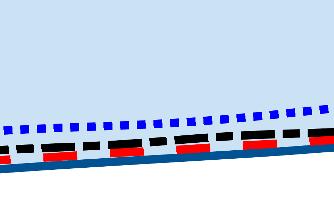
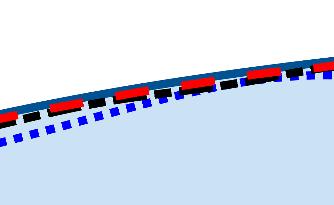
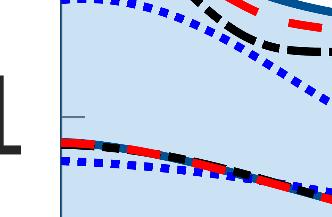
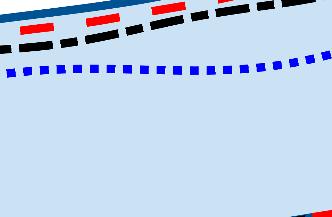
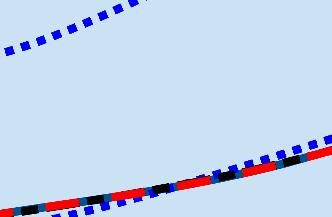
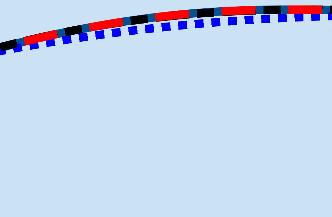
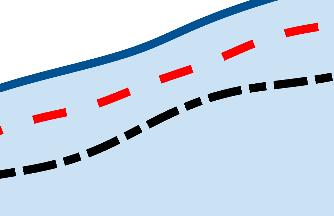
7 f (θ w) = ( (π)m det(σ θθ w ) ep ) [θ µ θ w] T Σ θθ w [θ µ θ w ] where the conditional mean vector µ θ w and the conditional autocovariance matri Σ θθ w are in analogy to Eqs. and 6, given by µ θ w = µ θ + Σ θ w Σ w w ( w µ w ) Σ θθ w = Σ θθ Σ θ w Σ w wσ T θ w here, it is seen that µ w = µ w, µ θ =, Σ θθ = I (where I R M M denotes the identity matri) and the remaining covariance terms are Σ θ w = E [ (θ µ θ )( w µ w ) T] = A T and Σ w w = E [ ( w µ w )( w µ w ) T] = AA T + Σ εε. Therefore, the mean and covariance matri of the posterior distribution for the K-L parameters θ can be computed respectively as, µ θ w = A T ( AA T + Σ εε ) ( w µw ) and Σ θθ w = I A T ( AA T + Σ εε ) A. The posterior distribution of the fleibility and deflection random fields can be obtained by propagating the posterior of θ through the K-L epansion and the observation function. In this case, both approimated posteriors random fields are also multivariate Gaussian described by the following approimated mean and autocovariance functions, ˆµ F w () = µ F () + σ F M k= λk φ k ()µ (k) θ w Ĉ F F w (, ) = σ F M M k= l= λk λ l φ k ()φ l ( )Σ (k,l) θθ w ˆµ w w () = µ w () + P σ F M k= λk Φ k ()µ (k) θ w Ĉ ww w (, ) = (P σ F ) M M k= l= λk λ l Φ k ()Φ l ( )Σ (k,l) θθ w. Note that the approimated posterior deflection parameters can be written in a compact matri form as ˆµ w w = µ w + Aµ θ w and ˆΣ ww w = AΣ θθ w A T. Numerical Investigations Figures and present the 9% confidence intervals (CI) of the posterior fleibility and deflection for different correlation lengths of the prior random field l F = [.,.,.] and number of terms in the K-L epansion M = [,, ]. The eact 9% CI of the posterior solution is highlighted (blue shaded area). Notice that all approimated CIs are within the eact interval. As epected, in both cases the results are more accurate for larger correlation lengths. It can be seen that the number of terms in the K-L epansion of the posterior fleibility (Figure ) must be increased for small correlation lengths in order to obtain a better approimation (M ). As the correlation length increases, this number can be reduced since the estimation improves considerably. A similar study was conducted to illustrate the approimation in the posterior deflection (Figure ). In this case, the K-L representation requires a smaller number of terms (M ), since the approimation is almost in agreement with the eact solution even when the variability of the random field is high. This behavior can be attributed to the fact that the posterior deflection is computed by an averaging of the K-L epansion of the fleibility random field. As a result of this process, the influence of the higher K-L eigenfunctions is almost negligible, and hence, only the first modes have a large contribution to the random field representation. The error measures given in Eq. are computed for the prior and posterior fleibility and deflection random fields as a function of the number of terms in the epansion (M =,..., ) and for different correlation lengths of the prior random field (l F = [.,.,.]); the results are shown in log-log scale plots on Figures 6 and 7.

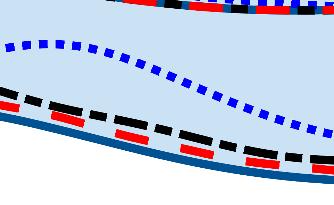



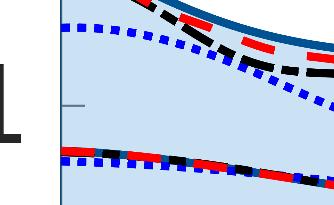
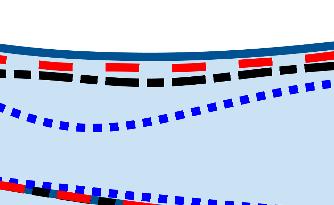



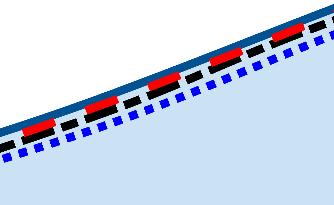




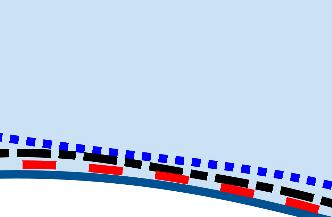

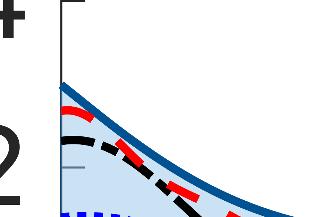
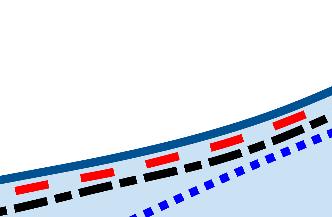



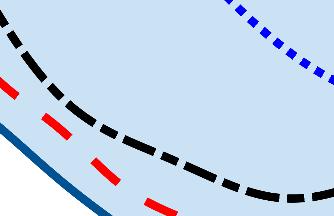
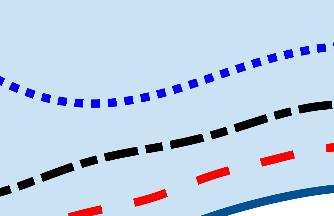








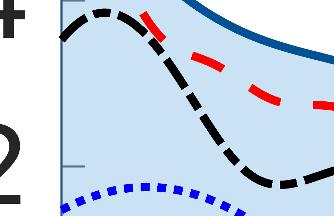



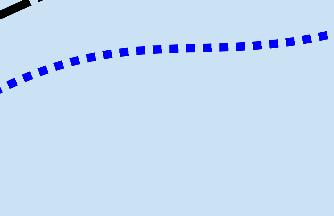




8 Figure : Posterior fleibility: 9% CI for different correlation lengths and terms in the K-L epansion. The shaded area corresponds to the eact CI. Figure : Posterior deflection (relative to the prior mean): 9% CI for different correlation lengths and terms in the K-L epansion. The shaded area corresponds to the eact CI. The comparison between the averaged relative mean error ε µ (M ) in the posterior random fields is shown in Figure 6. For the prior random field, this error measure becomes zero since the eact and approimated mean function values coincide. However, for the posterior random field, the truncation in the K-L epansion induces an error in the mean approimation. This error is controlled primarily by the number of terms in the epansion and its magnitude is considerable small as this number increases. Despite the fact that ε µ (M ) is small in this particular application,
9 it can be seen that it is at least one order of magnitude higher for the posterior fleibility than for the posterior deflection Figure 6: Averaged relative mean error in the posterior fleibility and deflection random fields for different correlation lengths and terms in the K-L epansion. Net, the comparison between the averaged relative variance error ε σ (M) in the prior and posterior random fields are shown in Figure 7, which illustrates the prior (first column) and the posterior (second column) approimations. It is interesting to see that the influence of the correlation length in the posterior random field is not as large as for the prior random field. The variance error decay of the fleibility (proportional to /M) is slower than in the deflection. Hence, the uncertainty about the posterior fleibility random field is more difficult to reduce as more terms in the K-L epansion are required to obtain the same variance error levels as for the posterior deflection. This characteristic behavior is again a consequence of the averaging, since the decay in the deflection is proportional to some power of /M (this can be verified analytically and is left as a further study). 6 Conclusions The present paper investigates the influence of the random field discretization on the outcome of the Bayesian inference based on an eample with analytical solution. In particular, the prior random field has been approimated using the truncated K-L epansion in order to reduce the dimensionality and to efficiently parametrize the random field. The advantage of the proposed eample lies in the possibility to derive the eact and approimated posterior random fields analytically. This allows us to efficiently carry out an error analysis. We have shown through this study that the K-L discretization has different influence on the prior and posterior random fields of the inverse and forward problems. In the forward problem (deflection), the approimation errors of the posterior mean and variance are small. Due to the averaging process that is carried out during the computation of the deflection, the higher K-L modes are essentially canceled out, and therefore, only the first modes of the epansion contribute to the representation. This behavior is different when the quantity of interest is highly dependent on the local fluctuations, e.g. strains and stresses (this is left as a further study). In the inverse problem (fleibility), the variance error decrease is slow compared to the deflection, and thus a larger number of terms in the K-L epansion are required for its accurate representation. Furthermore, in spite of the fact that the error levels in both quantities are not considerably drastic in this eample, the results indicate that it might be desirable in comple engineering applications the use of a finer K-L discretization when dealing with inverse problems. Acknowledgements This research is supported by the Deutsche Forschungsgemeinschaft (DFG) through the TUM International Graduate School of Science and Engineering (IGSSE).
10 Figure 7: Averaged normalized variance error in the prior and posterior fleibility and deflection random fields for different correlation lengths and terms in the K-L epansion. References [] A. Aleanderian. A brief note on the Karhunen-Loève epansion. In: arxiv:9.76v (), pp.. [] W. Betz, I. Papaioannou, and D. Straub. Numerical methods for the discretization of random fields by means of the Karhunen-Loève epansion. In: Computer Methods in Applied Mechanics and Engineering 7 (), pp [] A. Gelman, J. B. Carlin, H. S. Stern, D. B. Dunson, A. Vehtari, and D. B. Rubin. Bayesian Data Analysis. rd ed. Chapman and Hall/CRC,. [] R. G. Ghanem and P. D. Spanos. Stochastic finite elements: A spectral approach. Revised Edition. Dover Publications, Inc.,. [] J. Kaipio and E. Somersalo. Statistical and Computational Inverse Problems. Springer,. [6] P. D. Spanos, M. Beer, and J. Red-Horse. Karhunen-Loève epansion of stochastic processes with a modified eponential covariance kernel. In: Journal of Engineering Mechanics.7 (7), pp [7] G. Stefanou and M. Papadrakakis. Assessment of spectral representation and Karhunen-Loève epansion methods for the simulation of Gaussian stochastic fields. In: Computer Methods in Applied Mechanics and Engineering 96 (7), pp [8] D. Straub and I. Papaioannou. Bayesian Updating with Structural Reliability Methods. In: Journal of Engineering Mechanics. (), p.. [9] A. Stuart. Inverse problems: A Bayesian perspective. In: Acta Numerica 9 (), pp. 9. [] E. Vanmarcke. Random fields: Analysis and Synthesis. Revised and Epanded New Edition. World Scientific Publishing Company,.
Bayesian inference of random fields represented with the Karhunen-Loève expansion
 Bayesian inference of random fields represented with the Karhunen-Loève expansion Felipe Uribe a,, Iason Papaioannou a, Wolfgang Betz a, Daniel Straub a a Engineering Risk Analysis Group, Technische Universität
Bayesian inference of random fields represented with the Karhunen-Loève expansion Felipe Uribe a,, Iason Papaioannou a, Wolfgang Betz a, Daniel Straub a a Engineering Risk Analysis Group, Technische Universität
Multilevel Sequential 2 Monte Carlo for Bayesian Inverse Problems
 Jonas Latz 1 Multilevel Sequential 2 Monte Carlo for Bayesian Inverse Problems Jonas Latz Technische Universität München Fakultät für Mathematik Lehrstuhl für Numerische Mathematik jonas.latz@tum.de November
Jonas Latz 1 Multilevel Sequential 2 Monte Carlo for Bayesian Inverse Problems Jonas Latz Technische Universität München Fakultät für Mathematik Lehrstuhl für Numerische Mathematik jonas.latz@tum.de November
Gaussian processes. Chuong B. Do (updated by Honglak Lee) November 22, 2008
 November 22, 2008") Gaussian processes Chuong B Do (updated by Honglak Lee) November 22, 2008 Many of the classical machine learning algorithms that we talked about during the first half of this course fit the following pattern:
Gaussian processes Chuong B Do (updated by Honglak Lee) November 22, 2008 Many of the classical machine learning algorithms that we talked about during the first half of this course fit the following pattern:
A Vector-Space Approach for Stochastic Finite Element Analysis
 A Vector-Space Approach for Stochastic Finite Element Analysis S Adhikari 1 1 Swansea University, UK CST2010: Valencia, Spain Adhikari (Swansea) Vector-Space Approach for SFEM 14-17 September, 2010 1 /
A Vector-Space Approach for Stochastic Finite Element Analysis S Adhikari 1 1 Swansea University, UK CST2010: Valencia, Spain Adhikari (Swansea) Vector-Space Approach for SFEM 14-17 September, 2010 1 /
Risk and Reliability Analysis: Theory and Applications: In Honor of Prof. Armen Der Kiureghian. Edited by P.
 Appeared in: Risk and Reliability Analysis: Theory and Applications: In Honor of Prof. Armen Der Kiureghian. Edited by P. Gardoni, Springer, 2017 Reliability updating in the presence of spatial variability
Appeared in: Risk and Reliability Analysis: Theory and Applications: In Honor of Prof. Armen Der Kiureghian. Edited by P. Gardoni, Springer, 2017 Reliability updating in the presence of spatial variability
Lecture 10: Fourier Sine Series
 Introductory lecture notes on Partial Differential Equations - c Anthony Peirce. Not to be copied, used, or revised without eplicit written permission from the copyright owner. ecture : Fourier Sine Series
Introductory lecture notes on Partial Differential Equations - c Anthony Peirce. Not to be copied, used, or revised without eplicit written permission from the copyright owner. ecture : Fourier Sine Series
Transitional Markov Chain Monte Carlo: Observations and Improvements
 Transitional Markov Chain Monte Carlo: Observations and Improvements Wolfgang Betz, Iason Papaioannou, Daniel Straub Engineering Risk Analysis Group, Technische Universität München, 8333 München, Germany
Transitional Markov Chain Monte Carlo: Observations and Improvements Wolfgang Betz, Iason Papaioannou, Daniel Straub Engineering Risk Analysis Group, Technische Universität München, 8333 München, Germany
Numerical methods for the discretization of random fields by means of the Karhunen Loève expansion
 Numerical methods for the discretization of random fields by means of the Karhunen Loève expansion Wolfgang Betz, Iason Papaioannou, Daniel Straub Engineering Risk Analysis Group, Technische Universität
Numerical methods for the discretization of random fields by means of the Karhunen Loève expansion Wolfgang Betz, Iason Papaioannou, Daniel Straub Engineering Risk Analysis Group, Technische Universität
Statistics: Learning models from data
 DS-GA 1002 Lecture notes 5 October 19, 2015 Statistics: Learning models from data Learning models from data that are assumed to be generated probabilistically from a certain unknown distribution is a crucial
DS-GA 1002 Lecture notes 5 October 19, 2015 Statistics: Learning models from data Learning models from data that are assumed to be generated probabilistically from a certain unknown distribution is a crucial
Stochastic Spectral Approaches to Bayesian Inference
 Stochastic Spectral Approaches to Bayesian Inference Prof. Nathan L. Gibson Department of Mathematics Applied Mathematics and Computation Seminar March 4, 2011 Prof. Gibson (OSU) Spectral Approaches to
Stochastic Spectral Approaches to Bayesian Inference Prof. Nathan L. Gibson Department of Mathematics Applied Mathematics and Computation Seminar March 4, 2011 Prof. Gibson (OSU) Spectral Approaches to
Chapter 2. Random Variable. Define single random variables in terms of their PDF and CDF, and calculate moments such as the mean and variance.
 Chapter 2 Random Variable CLO2 Define single random variables in terms of their PDF and CDF, and calculate moments such as the mean and variance. 1 1. Introduction In Chapter 1, we introduced the concept
Chapter 2 Random Variable CLO2 Define single random variables in terms of their PDF and CDF, and calculate moments such as the mean and variance. 1 1. Introduction In Chapter 1, we introduced the concept
Characterization of heterogeneous hydraulic conductivity field via Karhunen-Loève expansions and a measure-theoretic computational method
 Characterization of heterogeneous hydraulic conductivity field via Karhunen-Loève expansions and a measure-theoretic computational method Jiachuan He University of Texas at Austin April 15, 2016 Jiachuan
Characterization of heterogeneous hydraulic conductivity field via Karhunen-Loève expansions and a measure-theoretic computational method Jiachuan He University of Texas at Austin April 15, 2016 Jiachuan
Uncertainty Quantification for Inverse Problems. November 7, 2011
 Uncertainty Quantification for Inverse Problems November 7, 2011 Outline UQ and inverse problems Review: least-squares Review: Gaussian Bayesian linear model Parametric reductions for IP Bias, variance
Uncertainty Quantification for Inverse Problems November 7, 2011 Outline UQ and inverse problems Review: least-squares Review: Gaussian Bayesian linear model Parametric reductions for IP Bias, variance
Labor-Supply Shifts and Economic Fluctuations. Technical Appendix
 Labor-Supply Shifts and Economic Fluctuations Technical Appendix Yongsung Chang Department of Economics University of Pennsylvania Frank Schorfheide Department of Economics University of Pennsylvania January
Labor-Supply Shifts and Economic Fluctuations Technical Appendix Yongsung Chang Department of Economics University of Pennsylvania Frank Schorfheide Department of Economics University of Pennsylvania January
Slice Sampling with Adaptive Multivariate Steps: The Shrinking-Rank Method
 Slice Sampling with Adaptive Multivariate Steps: The Shrinking-Rank Method Madeleine B. Thompson Radford M. Neal Abstract The shrinking rank method is a variation of slice sampling that is efficient at
Slice Sampling with Adaptive Multivariate Steps: The Shrinking-Rank Method Madeleine B. Thompson Radford M. Neal Abstract The shrinking rank method is a variation of slice sampling that is efficient at
Eigenvalues of Trusses and Beams Using the Accurate Element Method
 Eigenvalues of russes and Beams Using the Accurate Element Method Maty Blumenfeld Department of Strength of Materials Universitatea Politehnica Bucharest, Romania Paul Cizmas Department of Aerospace Engineering
Eigenvalues of russes and Beams Using the Accurate Element Method Maty Blumenfeld Department of Strength of Materials Universitatea Politehnica Bucharest, Romania Paul Cizmas Department of Aerospace Engineering
Probabilistic Structural Dynamics: Parametric vs. Nonparametric Approach
 Probabilistic Structural Dynamics: Parametric vs. Nonparametric Approach S Adhikari School of Engineering, Swansea University, Swansea, UK Email: S.Adhikari@swansea.ac.uk URL: http://engweb.swan.ac.uk/
Probabilistic Structural Dynamics: Parametric vs. Nonparametric Approach S Adhikari School of Engineering, Swansea University, Swansea, UK Email: S.Adhikari@swansea.ac.uk URL: http://engweb.swan.ac.uk/
Dynamic System Identification using HDMR-Bayesian Technique
 Dynamic System Identification using HDMR-Bayesian Technique *Shereena O A 1) and Dr. B N Rao 2) 1), 2) Department of Civil Engineering, IIT Madras, Chennai 600036, Tamil Nadu, India 1) ce14d020@smail.iitm.ac.in
Dynamic System Identification using HDMR-Bayesian Technique *Shereena O A 1) and Dr. B N Rao 2) 1), 2) Department of Civil Engineering, IIT Madras, Chennai 600036, Tamil Nadu, India 1) ce14d020@smail.iitm.ac.in
Expectation Propagation Algorithm
 Expectation Propagation Algorithm 1 Shuang Wang School of Electrical and Computer Engineering University of Oklahoma, Tulsa, OK, 74135 Email: {shuangwang}@ou.edu This note contains three parts. First,
Expectation Propagation Algorithm 1 Shuang Wang School of Electrical and Computer Engineering University of Oklahoma, Tulsa, OK, 74135 Email: {shuangwang}@ou.edu This note contains three parts. First,
2 Statistical Estimation: Basic Concepts
 Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 2 Statistical Estimation:
Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 2 Statistical Estimation:
ebay/google short course: Problem set 2
 18 Jan 013 ebay/google short course: Problem set 1. (the Echange Parado) You are playing the following game against an opponent, with a referee also taking part. The referee has two envelopes (numbered
18 Jan 013 ebay/google short course: Problem set 1. (the Echange Parado) You are playing the following game against an opponent, with a referee also taking part. The referee has two envelopes (numbered
A Statistical Input Pruning Method for Artificial Neural Networks Used in Environmental Modelling
 A Statistical Input Pruning Method for Artificial Neural Networks Used in Environmental Modelling G. B. Kingston, H. R. Maier and M. F. Lambert Centre for Applied Modelling in Water Engineering, School
A Statistical Input Pruning Method for Artificial Neural Networks Used in Environmental Modelling G. B. Kingston, H. R. Maier and M. F. Lambert Centre for Applied Modelling in Water Engineering, School
Collocation based high dimensional model representation for stochastic partial differential equations
 Collocation based high dimensional model representation for stochastic partial differential equations S Adhikari 1 1 Swansea University, UK ECCM 2010: IV European Conference on Computational Mechanics,
Collocation based high dimensional model representation for stochastic partial differential equations S Adhikari 1 1 Swansea University, UK ECCM 2010: IV European Conference on Computational Mechanics,
Dynamic response of structures with uncertain properties
 Dynamic response of structures with uncertain properties S. Adhikari 1 1 Chair of Aerospace Engineering, College of Engineering, Swansea University, Bay Campus, Fabian Way, Swansea, SA1 8EN, UK International
Dynamic response of structures with uncertain properties S. Adhikari 1 1 Chair of Aerospace Engineering, College of Engineering, Swansea University, Bay Campus, Fabian Way, Swansea, SA1 8EN, UK International
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Spectral methods for fuzzy structural dynamics: modal vs direct approach
 Spectral methods for fuzzy structural dynamics: modal vs direct approach S Adhikari Zienkiewicz Centre for Computational Engineering, College of Engineering, Swansea University, Wales, UK IUTAM Symposium
Spectral methods for fuzzy structural dynamics: modal vs direct approach S Adhikari Zienkiewicz Centre for Computational Engineering, College of Engineering, Swansea University, Wales, UK IUTAM Symposium
Bayes Model Selection with Path Sampling: Factor Models
 with Path Sampling: Factor Models Ritabrata Dutta and Jayanta K Ghosh Purdue University 07/02/11 Factor Models in Applications Factor Models in Applications Factor Models Factor Models and Factor analysis
with Path Sampling: Factor Models Ritabrata Dutta and Jayanta K Ghosh Purdue University 07/02/11 Factor Models in Applications Factor Models in Applications Factor Models Factor Models and Factor analysis
PDF Estimation via Characteristic Function and an Orthonormal Basis Set
 PDF Estimation via Characteristic Function and an Orthonormal Basis Set ROY M. HOWARD School of Electrical Engineering and Computing Curtin University of Technology GPO Bo U987, Perth 6845. AUSTRALIA r.howard@echange.curtin.edu.au
PDF Estimation via Characteristic Function and an Orthonormal Basis Set ROY M. HOWARD School of Electrical Engineering and Computing Curtin University of Technology GPO Bo U987, Perth 6845. AUSTRALIA r.howard@echange.curtin.edu.au
Review. DS GA 1002 Statistical and Mathematical Models. Carlos Fernandez-Granda
 Review DS GA 1002 Statistical and Mathematical Models http://www.cims.nyu.edu/~cfgranda/pages/dsga1002_fall16 Carlos Fernandez-Granda Probability and statistics Probability: Framework for dealing with
Review DS GA 1002 Statistical and Mathematical Models http://www.cims.nyu.edu/~cfgranda/pages/dsga1002_fall16 Carlos Fernandez-Granda Probability and statistics Probability: Framework for dealing with
Power EP. Thomas Minka Microsoft Research Ltd., Cambridge, UK MSR-TR , October 4, Abstract
 Power EP Thomas Minka Microsoft Research Ltd., Cambridge, UK MSR-TR-2004-149, October 4, 2004 Abstract This note describes power EP, an etension of Epectation Propagation (EP) that makes the computations
Power EP Thomas Minka Microsoft Research Ltd., Cambridge, UK MSR-TR-2004-149, October 4, 2004 Abstract This note describes power EP, an etension of Epectation Propagation (EP) that makes the computations
c 2016 Society for Industrial and Applied Mathematics
 SIAM J. SCI. COMPUT. Vol. 8, No. 5, pp. A779 A85 c 6 Society for Industrial and Applied Mathematics ACCELERATING MARKOV CHAIN MONTE CARLO WITH ACTIVE SUBSPACES PAUL G. CONSTANTINE, CARSON KENT, AND TAN
SIAM J. SCI. COMPUT. Vol. 8, No. 5, pp. A779 A85 c 6 Society for Industrial and Applied Mathematics ACCELERATING MARKOV CHAIN MONTE CARLO WITH ACTIVE SUBSPACES PAUL G. CONSTANTINE, CARSON KENT, AND TAN
However, reliability analysis is not limited to calculation of the probability of failure.
 Probabilistic Analysis probabilistic analysis methods, including the first and second-order reliability methods, Monte Carlo simulation, Importance sampling, Latin Hypercube sampling, and stochastic expansions
Probabilistic Analysis probabilistic analysis methods, including the first and second-order reliability methods, Monte Carlo simulation, Importance sampling, Latin Hypercube sampling, and stochastic expansions
The Expectation-Maximization Algorithm
 1/29 EM & Latent Variable Models Gaussian Mixture Models EM Theory The Expectation-Maximization Algorithm Mihaela van der Schaar Department of Engineering Science University of Oxford MLE for Latent Variable
1/29 EM & Latent Variable Models Gaussian Mixture Models EM Theory The Expectation-Maximization Algorithm Mihaela van der Schaar Department of Engineering Science University of Oxford MLE for Latent Variable
arxiv: v2 [math.pr] 27 Oct 2015
![arxiv: v2 [math.pr] 27 Oct 2015](/thumbs/84/89692990.jpg "arxiv: v2 [math.pr] 27 Oct 2015") A brief note on the Karhunen-Loève expansion Alen Alexanderian arxiv:1509.07526v2 [math.pr] 27 Oct 2015 October 28, 2015 Abstract We provide a detailed derivation of the Karhunen Loève expansion of a stochastic
A brief note on the Karhunen-Loève expansion Alen Alexanderian arxiv:1509.07526v2 [math.pr] 27 Oct 2015 October 28, 2015 Abstract We provide a detailed derivation of the Karhunen Loève expansion of a stochastic
Numerical Simulation of Threshold-Crossing Problem for Random Fields of Environmental Contamination
 Numerical Simulation of Threshold-Crossing Problem for Random Fields of Environmental Contamination Robert Jankowski Faculty of Civil and Environmental Engineering, Gdańsk University of Technology, ul.
Numerical Simulation of Threshold-Crossing Problem for Random Fields of Environmental Contamination Robert Jankowski Faculty of Civil and Environmental Engineering, Gdańsk University of Technology, ul.
Neutron inverse kinetics via Gaussian Processes
 Neutron inverse kinetics via Gaussian Processes P. Picca Politecnico di Torino, Torino, Italy R. Furfaro University of Arizona, Tucson, Arizona Outline Introduction Review of inverse kinetics techniques
Neutron inverse kinetics via Gaussian Processes P. Picca Politecnico di Torino, Torino, Italy R. Furfaro University of Arizona, Tucson, Arizona Outline Introduction Review of inverse kinetics techniques
6. Vector Random Variables
 6. Vector Random Variables In the previous chapter we presented methods for dealing with two random variables. In this chapter we etend these methods to the case of n random variables in the following
6. Vector Random Variables In the previous chapter we presented methods for dealing with two random variables. In this chapter we etend these methods to the case of n random variables in the following
Lecture 3: Pattern Classification. Pattern classification
 EE E68: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mitures and
EE E68: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mitures and
Bayesian Inference. Chapter 1. Introduction and basic concepts
 Bayesian Inference Chapter 1. Introduction and basic concepts M. Concepción Ausín Department of Statistics Universidad Carlos III de Madrid Master in Business Administration and Quantitative Methods Master
Bayesian Inference Chapter 1. Introduction and basic concepts M. Concepción Ausín Department of Statistics Universidad Carlos III de Madrid Master in Business Administration and Quantitative Methods Master
Quantile POD for Hit-Miss Data
 Quantile POD for Hit-Miss Data Yew-Meng Koh a and William Q. Meeker a a Center for Nondestructive Evaluation, Department of Statistics, Iowa State niversity, Ames, Iowa 50010 Abstract. Probability of detection
Quantile POD for Hit-Miss Data Yew-Meng Koh a and William Q. Meeker a a Center for Nondestructive Evaluation, Department of Statistics, Iowa State niversity, Ames, Iowa 50010 Abstract. Probability of detection
A Padé approximation to the scalar wavefield extrapolator for inhomogeneous media
 A Padé approimation A Padé approimation to the scalar wavefield etrapolator for inhomogeneous media Yanpeng Mi, Zhengsheng Yao, and Gary F. Margrave ABSTRACT A seismic wavefield at depth z can be obtained
A Padé approimation A Padé approimation to the scalar wavefield etrapolator for inhomogeneous media Yanpeng Mi, Zhengsheng Yao, and Gary F. Margrave ABSTRACT A seismic wavefield at depth z can be obtained
ELEG 3143 Probability & Stochastic Process Ch. 6 Stochastic Process
 Department of Electrical Engineering University of Arkansas ELEG 3143 Probability & Stochastic Process Ch. 6 Stochastic Process Dr. Jingxian Wu wuj@uark.edu OUTLINE 2 Definition of stochastic process (random
Department of Electrical Engineering University of Arkansas ELEG 3143 Probability & Stochastic Process Ch. 6 Stochastic Process Dr. Jingxian Wu wuj@uark.edu OUTLINE 2 Definition of stochastic process (random
A Spectral Approach to Linear Bayesian Updating
 A Spectral Approach to Linear Bayesian Updating Oliver Pajonk 1,2, Bojana V. Rosic 1, Alexander Litvinenko 1, and Hermann G. Matthies 1 1 Institute of Scientific Computing, TU Braunschweig, Germany 2 SPT
A Spectral Approach to Linear Bayesian Updating Oliver Pajonk 1,2, Bojana V. Rosic 1, Alexander Litvinenko 1, and Hermann G. Matthies 1 1 Institute of Scientific Computing, TU Braunschweig, Germany 2 SPT
Nonparametric Bayesian Methods (Gaussian Processes)
") [70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
[70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
Rejection sampling - Acceptance probability. Review: How to sample from a multivariate normal in R. Review: Rejection sampling. Weighted resampling
 Rejection sampling - Acceptance probability Review: How to sample from a multivariate normal in R Goal: Simulate from N d (µ,σ)? Note: For c to be small, g() must be similar to f(). The art of rejection
Rejection sampling - Acceptance probability Review: How to sample from a multivariate normal in R Goal: Simulate from N d (µ,σ)? Note: For c to be small, g() must be similar to f(). The art of rejection
Comparison of Unit Cell Geometry for Bloch Wave Analysis in Two Dimensional Periodic Beam Structures
 Clemson University TigerPrints All Theses Theses 8-018 Comparison of Unit Cell Geometry for Bloch Wave Analysis in Two Dimensional Periodic Beam Structures Likitha Marneni Clemson University, lmarnen@g.clemson.edu
Clemson University TigerPrints All Theses Theses 8-018 Comparison of Unit Cell Geometry for Bloch Wave Analysis in Two Dimensional Periodic Beam Structures Likitha Marneni Clemson University, lmarnen@g.clemson.edu
DS-GA 1002 Lecture notes 11 Fall Bayesian statistics
 DS-GA 100 Lecture notes 11 Fall 016 Bayesian statistics In the frequentist paradigm we model the data as realizations from a distribution that depends on deterministic parameters. In contrast, in Bayesian
DS-GA 100 Lecture notes 11 Fall 016 Bayesian statistics In the frequentist paradigm we model the data as realizations from a distribution that depends on deterministic parameters. In contrast, in Bayesian
Signals and Spectra - Review
 Signals and Spectra - Review SIGNALS DETERMINISTIC No uncertainty w.r.t. the value of a signal at any time Modeled by mathematical epressions RANDOM some degree of uncertainty before the signal occurs
Signals and Spectra - Review SIGNALS DETERMINISTIC No uncertainty w.r.t. the value of a signal at any time Modeled by mathematical epressions RANDOM some degree of uncertainty before the signal occurs
1 Coherent-Mode Representation of Optical Fields and Sources
 1 Coherent-Mode Representation of Optical Fields and Sources 1.1 Introduction In the 1980s, E. Wolf proposed a new theory of partial coherence formulated in the space-frequency domain. 1,2 The fundamental
1 Coherent-Mode Representation of Optical Fields and Sources 1.1 Introduction In the 1980s, E. Wolf proposed a new theory of partial coherence formulated in the space-frequency domain. 1,2 The fundamental
1.571 Structural Analysis and Control Prof. Connor Section 3: Analysis of Cable Supported Structures
 .57 Structural Analysis and Control Prof. Connor Section 3: Analysis of Cale Supported Structures Many high performance structures include cales and cale systems. Analysis and design of cale systems is
.57 Structural Analysis and Control Prof. Connor Section 3: Analysis of Cale Supported Structures Many high performance structures include cales and cale systems. Analysis and design of cale systems is
SIMON FRASER UNIVERSITY School of Engineering Science
 SIMON FRASER UNIVERSITY School of Engineering Science Course Outline ENSC 810-3 Digital Signal Processing Calendar Description This course covers advanced digital signal processing techniques. The main
SIMON FRASER UNIVERSITY School of Engineering Science Course Outline ENSC 810-3 Digital Signal Processing Calendar Description This course covers advanced digital signal processing techniques. The main
Value of Information Analysis with Structural Reliability Methods
 Accepted for publication in Structural Safety, special issue in the honor of Prof. Wilson Tang August 2013 Value of Information Analysis with Structural Reliability Methods Daniel Straub Engineering Risk
Accepted for publication in Structural Safety, special issue in the honor of Prof. Wilson Tang August 2013 Value of Information Analysis with Structural Reliability Methods Daniel Straub Engineering Risk
State Space and Hidden Markov Models
 State Space and Hidden Markov Models Kunsch H.R. State Space and Hidden Markov Models. ETH- Zurich Zurich; Aliaksandr Hubin Oslo 2014 Contents 1. Introduction 2. Markov Chains 3. Hidden Markov and State
State Space and Hidden Markov Models Kunsch H.R. State Space and Hidden Markov Models. ETH- Zurich Zurich; Aliaksandr Hubin Oslo 2014 Contents 1. Introduction 2. Markov Chains 3. Hidden Markov and State
MAS3301 Bayesian Statistics
 MAS3301 Bayesian Statistics M. Farrow School of Mathematics and Statistics Newcastle University Semester 2, 2008-9 1 11 Conjugate Priors IV: The Dirichlet distribution and multinomial observations 11.1
MAS3301 Bayesian Statistics M. Farrow School of Mathematics and Statistics Newcastle University Semester 2, 2008-9 1 11 Conjugate Priors IV: The Dirichlet distribution and multinomial observations 11.1
MACHINE LEARNING ADVANCED MACHINE LEARNING
 MACHINE LEARNING ADVANCED MACHINE LEARNING Recap of Important Notions on Estimation of Probability Density Functions 2 2 MACHINE LEARNING Overview Definition pdf Definition joint, condition, marginal,
MACHINE LEARNING ADVANCED MACHINE LEARNING Recap of Important Notions on Estimation of Probability Density Functions 2 2 MACHINE LEARNING Overview Definition pdf Definition joint, condition, marginal,
Problem d d d B C E D. 0.8d. Additional lecturebook examples 29 ME 323
 Problem 9.1 Two beam segments, AC and CD, are connected together at C by a frictionless pin. Segment CD is cantilevered from a rigid support at D, and segment AC has a roller support at A. a) Determine
Problem 9.1 Two beam segments, AC and CD, are connected together at C by a frictionless pin. Segment CD is cantilevered from a rigid support at D, and segment AC has a roller support at A. a) Determine
Approximate Message Passing with Built-in Parameter Estimation for Sparse Signal Recovery
 Approimate Message Passing with Built-in Parameter Estimation for Sparse Signal Recovery arxiv:1606.00901v1 [cs.it] Jun 016 Shuai Huang, Trac D. Tran Department of Electrical and Computer Engineering Johns
Approimate Message Passing with Built-in Parameter Estimation for Sparse Signal Recovery arxiv:1606.00901v1 [cs.it] Jun 016 Shuai Huang, Trac D. Tran Department of Electrical and Computer Engineering Johns
McGill University. Department of Epidemiology and Biostatistics. Bayesian Analysis for the Health Sciences. Course EPIB-675.
 McGill University Department of Epidemiology and Biostatistics Bayesian Analysis for the Health Sciences Course EPIB-675 Lawrence Joseph Bayesian Analysis for the Health Sciences EPIB-675 3 credits Instructor:
McGill University Department of Epidemiology and Biostatistics Bayesian Analysis for the Health Sciences Course EPIB-675 Lawrence Joseph Bayesian Analysis for the Health Sciences EPIB-675 3 credits Instructor:
Computation fundamentals of discrete GMRF representations of continuous domain spatial models
 Computation fundamentals of discrete GMRF representations of continuous domain spatial models Finn Lindgren September 23 2015 v0.2.2 Abstract The fundamental formulas and algorithms for Bayesian spatial
Computation fundamentals of discrete GMRF representations of continuous domain spatial models Finn Lindgren September 23 2015 v0.2.2 Abstract The fundamental formulas and algorithms for Bayesian spatial
MACHINE LEARNING ADVANCED MACHINE LEARNING
 MACHINE LEARNING ADVANCED MACHINE LEARNING Recap of Important Notions on Estimation of Probability Density Functions 22 MACHINE LEARNING Discrete Probabilities Consider two variables and y taking discrete
MACHINE LEARNING ADVANCED MACHINE LEARNING Recap of Important Notions on Estimation of Probability Density Functions 22 MACHINE LEARNING Discrete Probabilities Consider two variables and y taking discrete
MODEL COMPARISON CHRISTOPHER A. SIMS PRINCETON UNIVERSITY
 ECO 513 Fall 2008 MODEL COMPARISON CHRISTOPHER A. SIMS PRINCETON UNIVERSITY SIMS@PRINCETON.EDU 1. MODEL COMPARISON AS ESTIMATING A DISCRETE PARAMETER Data Y, models 1 and 2, parameter vectors θ 1, θ 2.
ECO 513 Fall 2008 MODEL COMPARISON CHRISTOPHER A. SIMS PRINCETON UNIVERSITY SIMS@PRINCETON.EDU 1. MODEL COMPARISON AS ESTIMATING A DISCRETE PARAMETER Data Y, models 1 and 2, parameter vectors θ 1, θ 2.
4.5 The framework element stiffness matrix
 45 The framework element stiffness matri Consider a 1 degree-of-freedom element that is straight prismatic and symmetric about both principal cross-sectional aes For such a section the shear center coincides
45 The framework element stiffness matri Consider a 1 degree-of-freedom element that is straight prismatic and symmetric about both principal cross-sectional aes For such a section the shear center coincides
New Developments in LS-OPT - Robustness Studies
 5. LS-DYNA - Anwenderforum, Ulm 2006 Robustheit / Optimierung I New Developments in LS-OPT - Robustness Studies Ken Craig, Willem Roux 2, Nielen Stander 2 Multidisciplinary Design Optimization Group University
5. LS-DYNA - Anwenderforum, Ulm 2006 Robustheit / Optimierung I New Developments in LS-OPT - Robustness Studies Ken Craig, Willem Roux 2, Nielen Stander 2 Multidisciplinary Design Optimization Group University
Probabilistic Graphical Models
 Probabilistic Graphical Models Lecture Notes Fall 2009 November, 2009 Byoung-Ta Zhang School of Computer Science and Engineering & Cognitive Science, Brain Science, and Bioinformatics Seoul National University
Probabilistic Graphical Models Lecture Notes Fall 2009 November, 2009 Byoung-Ta Zhang School of Computer Science and Engineering & Cognitive Science, Brain Science, and Bioinformatics Seoul National University
The Bayesian approach to inverse problems
 The Bayesian approach to inverse problems Youssef Marzouk Department of Aeronautics and Astronautics Center for Computational Engineering Massachusetts Institute of Technology ymarz@mit.edu, http://uqgroup.mit.edu
The Bayesian approach to inverse problems Youssef Marzouk Department of Aeronautics and Astronautics Center for Computational Engineering Massachusetts Institute of Technology ymarz@mit.edu, http://uqgroup.mit.edu
Random Field Solutions Including Boundary Condition Uncertainty for the Steady-state Generalized Burgers Equation
 NASA/CR-1-1139 ICASE Report No. 1-35 Random Field Solutions Including Boundary Condition Uncertainty for the Steady-state Generalized Burgers Equation Luc Huyse ICASE, Hampton, Virginia Robert W. Walters
NASA/CR-1-1139 ICASE Report No. 1-35 Random Field Solutions Including Boundary Condition Uncertainty for the Steady-state Generalized Burgers Equation Luc Huyse ICASE, Hampton, Virginia Robert W. Walters
Stochastic Elastic-Plastic Finite Element Method for Performance Risk Simulations
 Stochastic Elastic-Plastic Finite Element Method for Performance Risk Simulations Boris Jeremić 1 Kallol Sett 2 1 University of California, Davis 2 University of Akron, Ohio ICASP Zürich, Switzerland August
Stochastic Elastic-Plastic Finite Element Method for Performance Risk Simulations Boris Jeremić 1 Kallol Sett 2 1 University of California, Davis 2 University of Akron, Ohio ICASP Zürich, Switzerland August
Gaussian Process priors with Uncertain Inputs: Multiple-Step-Ahead Prediction
 Gaussian Process priors with Uncertain Inputs: Multiple-Step-Ahead Prediction Agathe Girard Dept. of Computing Science University of Glasgow Glasgow, UK agathe@dcs.gla.ac.uk Carl Edward Rasmussen Gatsby
Gaussian Process priors with Uncertain Inputs: Multiple-Step-Ahead Prediction Agathe Girard Dept. of Computing Science University of Glasgow Glasgow, UK agathe@dcs.gla.ac.uk Carl Edward Rasmussen Gatsby
Introduction to Systems Analysis and Decision Making Prepared by: Jakub Tomczak
 Introduction to Systems Analysis and Decision Making Prepared by: Jakub Tomczak 1 Introduction. Random variables During the course we are interested in reasoning about considered phenomenon. In other words,
Introduction to Systems Analysis and Decision Making Prepared by: Jakub Tomczak 1 Introduction. Random variables During the course we are interested in reasoning about considered phenomenon. In other words,
Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen
 Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen PARAMetric UNCertainties, Budapest STOCHASTIC PROCESSES AND FIELDS Noémi Friedman Institut für Wissenschaftliches Rechnen, wire@tu-bs.de
Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen PARAMetric UNCertainties, Budapest STOCHASTIC PROCESSES AND FIELDS Noémi Friedman Institut für Wissenschaftliches Rechnen, wire@tu-bs.de
If we want to analyze experimental or simulated data we might encounter the following tasks:
 Chapter 1 Introduction If we want to analyze experimental or simulated data we might encounter the following tasks: Characterization of the source of the signal and diagnosis Studying dependencies Prediction
Chapter 1 Introduction If we want to analyze experimental or simulated data we might encounter the following tasks: Characterization of the source of the signal and diagnosis Studying dependencies Prediction
Parametrically Excited Vibration in Rolling Element Bearings
 Parametrically Ecited Vibration in Rolling Element Bearings R. Srinath ; A. Sarkar ; A. S. Sekhar 3,,3 Indian Institute of Technology Madras, India, 636 ABSTRACT A defect-free rolling element bearing has
Parametrically Ecited Vibration in Rolling Element Bearings R. Srinath ; A. Sarkar ; A. S. Sekhar 3,,3 Indian Institute of Technology Madras, India, 636 ABSTRACT A defect-free rolling element bearing has
Estimators as Random Variables
 Estimation Theory Overview Properties Bias, Variance, and Mean Square Error Cramér-Rao lower bound Maimum likelihood Consistency Confidence intervals Properties of the mean estimator Introduction Up until
Estimation Theory Overview Properties Bias, Variance, and Mean Square Error Cramér-Rao lower bound Maimum likelihood Consistency Confidence intervals Properties of the mean estimator Introduction Up until
Review of Probability
 Review of robabilit robabilit Theor: Man techniques in speech processing require the manipulation of probabilities and statistics. The two principal application areas we will encounter are: Statistical
Review of robabilit robabilit Theor: Man techniques in speech processing require the manipulation of probabilities and statistics. The two principal application areas we will encounter are: Statistical
SYLLABUS FOR ENTRANCE EXAMINATION NANYANG TECHNOLOGICAL UNIVERSITY FOR INTERNATIONAL STUDENTS A-LEVEL MATHEMATICS
 SYLLABUS FOR ENTRANCE EXAMINATION NANYANG TECHNOLOGICAL UNIVERSITY FOR INTERNATIONAL STUDENTS A-LEVEL MATHEMATICS STRUCTURE OF EXAMINATION PAPER. There will be one -hour paper consisting of 4 questions..
SYLLABUS FOR ENTRANCE EXAMINATION NANYANG TECHNOLOGICAL UNIVERSITY FOR INTERNATIONAL STUDENTS A-LEVEL MATHEMATICS STRUCTURE OF EXAMINATION PAPER. There will be one -hour paper consisting of 4 questions..
Bayesian Inference. p(y)
") Bayesian Inference There are different ways to interpret a probability statement in a real world setting. Frequentist interpretations of probability apply to situations that can be repeated many times,
Bayesian Inference There are different ways to interpret a probability statement in a real world setting. Frequentist interpretations of probability apply to situations that can be repeated many times,
Linear Regression and Discrimination
 Linear Regression and Discrimination Kernel-based Learning Methods Christian Igel Institut für Neuroinformatik Ruhr-Universität Bochum, Germany http://www.neuroinformatik.rub.de July 16, 2009 Christian
Linear Regression and Discrimination Kernel-based Learning Methods Christian Igel Institut für Neuroinformatik Ruhr-Universität Bochum, Germany http://www.neuroinformatik.rub.de July 16, 2009 Christian
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Sparse polynomial chaos expansions in engineering applications
 DEPARTMENT OF CIVIL, ENVIRONMENTAL AND GEOMATIC ENGINEERING CHAIR OF RISK, SAFETY & UNCERTAINTY QUANTIFICATION Sparse polynomial chaos expansions in engineering applications B. Sudret G. Blatman (EDF R&D,
DEPARTMENT OF CIVIL, ENVIRONMENTAL AND GEOMATIC ENGINEERING CHAIR OF RISK, SAFETY & UNCERTAINTY QUANTIFICATION Sparse polynomial chaos expansions in engineering applications B. Sudret G. Blatman (EDF R&D,
Bayesian Inference for the Multivariate Normal
 Bayesian Inference for the Multivariate Normal Will Penny Wellcome Trust Centre for Neuroimaging, University College, London WC1N 3BG, UK. November 28, 2014 Abstract Bayesian inference for the multivariate
Bayesian Inference for the Multivariate Normal Will Penny Wellcome Trust Centre for Neuroimaging, University College, London WC1N 3BG, UK. November 28, 2014 Abstract Bayesian inference for the multivariate
1 Bayesian Linear Regression (BLR)
") Statistical Techniques in Robotics (STR, S15) Lecture#10 (Wednesday, February 11) Lecturer: Byron Boots Gaussian Properties, Bayesian Linear Regression 1 Bayesian Linear Regression (BLR) In linear regression,
Statistical Techniques in Robotics (STR, S15) Lecture#10 (Wednesday, February 11) Lecturer: Byron Boots Gaussian Properties, Bayesian Linear Regression 1 Bayesian Linear Regression (BLR) In linear regression,
Uncertainty quantification for flow in highly heterogeneous porous media
 695 Uncertainty quantification for flow in highly heterogeneous porous media D. Xiu and D.M. Tartakovsky a a Theoretical Division, Los Alamos National Laboratory, Mathematical Modeling and Analysis Group
695 Uncertainty quantification for flow in highly heterogeneous porous media D. Xiu and D.M. Tartakovsky a a Theoretical Division, Los Alamos National Laboratory, Mathematical Modeling and Analysis Group
Introduction. Chapter 1
 Chapter 1 Introduction In this book we will be concerned with supervised learning, which is the problem of learning input-output mappings from empirical data (the training dataset). Depending on the characteristics
Chapter 1 Introduction In this book we will be concerned with supervised learning, which is the problem of learning input-output mappings from empirical data (the training dataset). Depending on the characteristics
F & B Approaches to a simple model
 A6523 Signal Modeling, Statistical Inference and Data Mining in Astrophysics Spring 215 http://www.astro.cornell.edu/~cordes/a6523 Lecture 11 Applications: Model comparison Challenges in large-scale surveys
A6523 Signal Modeling, Statistical Inference and Data Mining in Astrophysics Spring 215 http://www.astro.cornell.edu/~cordes/a6523 Lecture 11 Applications: Model comparison Challenges in large-scale surveys
Statistical signal processing
 Statistical signal processing Short overview of the fundamentals Outline Random variables Random processes Stationarity Ergodicity Spectral analysis Random variable and processes Intuition: A random variable
Statistical signal processing Short overview of the fundamentals Outline Random variables Random processes Stationarity Ergodicity Spectral analysis Random variable and processes Intuition: A random variable
Sequential Importance Sampling for Rare Event Estimation with Computer Experiments
 Sequential Importance Sampling for Rare Event Estimation with Computer Experiments Brian Williams and Rick Picard LA-UR-12-22467 Statistical Sciences Group, Los Alamos National Laboratory Abstract Importance
Sequential Importance Sampling for Rare Event Estimation with Computer Experiments Brian Williams and Rick Picard LA-UR-12-22467 Statistical Sciences Group, Los Alamos National Laboratory Abstract Importance
Model comparison. Christopher A. Sims Princeton University October 18, 2016
 ECO 513 Fall 2008 Model comparison Christopher A. Sims Princeton University sims@princeton.edu October 18, 2016 c 2016 by Christopher A. Sims. This document may be reproduced for educational and research
ECO 513 Fall 2008 Model comparison Christopher A. Sims Princeton University sims@princeton.edu October 18, 2016 c 2016 by Christopher A. Sims. This document may be reproduced for educational and research
Machine Learning Lecture 3
 Announcements Machine Learning Lecture 3 Eam dates We re in the process of fiing the first eam date Probability Density Estimation II 9.0.207 Eercises The first eercise sheet is available on L2P now First
Announcements Machine Learning Lecture 3 Eam dates We re in the process of fiing the first eam date Probability Density Estimation II 9.0.207 Eercises The first eercise sheet is available on L2P now First
Variational Bayes. A key quantity in Bayesian inference is the marginal likelihood of a set of data D given a model M
 A key quantity in Bayesian inference is the marginal likelihood of a set of data D given a model M PD M = PD θ, MPθ Mdθ Lecture 14 : Variational Bayes where θ are the parameters of the model and Pθ M is
A key quantity in Bayesian inference is the marginal likelihood of a set of data D given a model M PD M = PD θ, MPθ Mdθ Lecture 14 : Variational Bayes where θ are the parameters of the model and Pθ M is
Density Estimation. Seungjin Choi
 Density Estimation Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr http://mlg.postech.ac.kr/
Density Estimation Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr http://mlg.postech.ac.kr/
CSC321 Lecture 18: Learning Probabilistic Models
 CSC321 Lecture 18: Learning Probabilistic Models Roger Grosse Roger Grosse CSC321 Lecture 18: Learning Probabilistic Models 1 / 25 Overview So far in this course: mainly supervised learning Language modeling
CSC321 Lecture 18: Learning Probabilistic Models Roger Grosse Roger Grosse CSC321 Lecture 18: Learning Probabilistic Models 1 / 25 Overview So far in this course: mainly supervised learning Language modeling
PART I INTRODUCTION The meaning of probability Basic definitions for frequentist statistics and Bayesian inference Bayesian inference Combinatorics
 Table of Preface page xi PART I INTRODUCTION 1 1 The meaning of probability 3 1.1 Classical definition of probability 3 1.2 Statistical definition of probability 9 1.3 Bayesian understanding of probability
Table of Preface page xi PART I INTRODUCTION 1 1 The meaning of probability 3 1.1 Classical definition of probability 3 1.2 Statistical definition of probability 9 1.3 Bayesian understanding of probability
x. Figure 1: Examples of univariate Gaussian pdfs N (x; µ, σ 2 ).
.") .8.6 µ =, σ = 1 µ = 1, σ = 1 / µ =, σ =.. 3 1 1 3 x Figure 1: Examples of univariate Gaussian pdfs N (x; µ, σ ). The Gaussian distribution Probably the most-important distribution in all of statistics
.8.6 µ =, σ = 1 µ = 1, σ = 1 / µ =, σ =.. 3 1 1 3 x Figure 1: Examples of univariate Gaussian pdfs N (x; µ, σ ). The Gaussian distribution Probably the most-important distribution in all of statistics
Introduction to Probability Theory for Graduate Economics Fall 2008
 Introduction to Probability Theory for Graduate Economics Fall 008 Yiğit Sağlam October 10, 008 CHAPTER - RANDOM VARIABLES AND EXPECTATION 1 1 Random Variables A random variable (RV) is a real-valued function
Introduction to Probability Theory for Graduate Economics Fall 008 Yiğit Sağlam October 10, 008 CHAPTER - RANDOM VARIABLES AND EXPECTATION 1 1 Random Variables A random variable (RV) is a real-valued function
Machine Learning 4771
 Machine Learning 4771 Instructor: Tony Jebara Topic 7 Unsupervised Learning Statistical Perspective Probability Models Discrete & Continuous: Gaussian, Bernoulli, Multinomial Maimum Likelihood Logistic
Machine Learning 4771 Instructor: Tony Jebara Topic 7 Unsupervised Learning Statistical Perspective Probability Models Discrete & Continuous: Gaussian, Bernoulli, Multinomial Maimum Likelihood Logistic
A Comparison of Particle Filters for Personal Positioning
 VI Hotine-Marussi Symposium of Theoretical and Computational Geodesy May 9-June 6. A Comparison of Particle Filters for Personal Positioning D. Petrovich and R. Piché Institute of Mathematics Tampere University
VI Hotine-Marussi Symposium of Theoretical and Computational Geodesy May 9-June 6. A Comparison of Particle Filters for Personal Positioning D. Petrovich and R. Piché Institute of Mathematics Tampere University
Chapter 5. Statistical Models in Simulations 5.1. Prof. Dr. Mesut Güneş Ch. 5 Statistical Models in Simulations
 Chapter 5 Statistical Models in Simulations 5.1 Contents Basic Probability Theory Concepts Discrete Distributions Continuous Distributions Poisson Process Empirical Distributions Useful Statistical Models
Chapter 5 Statistical Models in Simulations 5.1 Contents Basic Probability Theory Concepts Discrete Distributions Continuous Distributions Poisson Process Empirical Distributions Useful Statistical Models
Gaussian Process Approximations of Stochastic Differential Equations
 Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
Elsevier Editorial System(tm) for Journal Of Computational Physics Manuscript Draft
 for Journal Of Computational Physics Manuscript Draft") Elsevier Editorial System(tm) for Journal Of Computational Physics Manuscript Draft Manuscript Number: JCOMP-D-11-756 Title: New evolution equations for the joint response-ecitation probability density
Elsevier Editorial System(tm) for Journal Of Computational Physics Manuscript Draft Manuscript Number: JCOMP-D-11-756 Title: New evolution equations for the joint response-ecitation probability density
Introduction to Probability and Statistics (Continued)
") Introduction to Probability and Statistics (Continued) Prof. icholas Zabaras Center for Informatics and Computational Science https://cics.nd.edu/ University of otre Dame otre Dame, Indiana, USA Email:
Introduction to Probability and Statistics (Continued) Prof. icholas Zabaras Center for Informatics and Computational Science https://cics.nd.edu/ University of otre Dame otre Dame, Indiana, USA Email: