Altitude and Motion Estimation for Autonomous Vehicles through Wide-Field-Integration of Optic Flow
|
|
|
- Ernest Lang
- 5 years ago
- Views:
Transcription
1 Altitude and Motion Estimation for Autonomous Vehiles through Wide-ield-Integration of Opti low By Ryusuke AKAA, ) aoto KOBAYASHI, ) Mai BADO, ) and Shinji HOKAMOO ) ) Department of Aeronautis and Astronautis, Kyushu University, ukuoka, Japan (Reeived June 2st, 207) his study proposes an estimation method not only veloity dependent motion variables but also altitude information of a vehile. or the estimation of the variables, Wide-ield-Integration (WI) of opti flow algorithm is applied to image data obtained by onboard ameras. In this paper, first opti flow representations for vehile motion is extended so that they are appliable to images obtained by ameras off from the mass enter of a vehile. hen, to make the altitude estimation possible, the extended proedure is applied to opti flow obtained by two ameras: one is plaed at mass enter of a vehile, and another is a different position. he effetiveness of the proposed method is verified by numerial simulations onsidering sensor noises. Key Words: Opti flow, Motion Estimation, Altitude Estimation, WI of opti flow omenlature : sensitivity funtion : referene frame Q : position vetor of a photoreeptor Q : motion parallax vetor p : angular rate around x b -axis q : angular rate around y b -axis r : angular rate around b -axis u : translational veloity along x b -axis v : translational veloity vetor w.r.t. b v : translational veloity along y b -axis w : translational veloity along b -axis x : state variables : altitude : elevation angle : aimuth angle : nearness funtion : numerator of nearness funtion ω : rotational veloity vetor w.r.t. b Supersript : elevational diretion : aimuth diretion Subsripts b : body fixed t : terrain fixed. Introdution or deep spae exploration missions, autonomy is one of the key tehnologies beause the time delay of ommands from Earth is extremely long. hus, in the viinity of target elestial bodies, autonomous motion ontrol of spae probes should be established by using onboard sensors, beause exogenous position sensors (e.g. Global Positioning System: GPS) annot be used. urthermore, suh autonomous ontrol systems are desirable to be light weight, small sie, and low omputation. Wide-ield-Integration (WI) of opti flow is one of the promising tehniques, beause it has the desirable features stated above. WI of opti flow is a motion estimation method inspired by a biologial researh on the visual proessing systems of flying insets ompound eyes. )-6) Opti flow is the vetor field of relative motion to environments, and the integration over a wide field of opti flow (i.e. WI of opti flow) makes the motion estimation robust even in unknown environments. In the standard proedure for WI of opti flow, the translational and rotational veloities of a vehile are estimated by using other sensor outputs for the altitude and attitude information. Usually, the altitude is measured with a laser sensor, while the attitude information is obtained by Inertial avigation System, e.g. aelerometer, gyrosope, magneti sensor, et. his paper disusses a method to estimate not only the translational and rotational veloities but also the vehile s altitude information. 7), 8) he altitude estimation by WI of opti flow are investigated as, ) a bakup system of a laser sensor, 2) an alternative method when a laser sensor is useless due to engine plume in a final touh down phase, and 3) expanded theory from aademi viewpoints. irst, the fundamental relation between vehile s motion and opti flow obtained by a amera is generalied for arbitrary amera positions. hen, by utiliing two sets of opti flow obtained by two image sensors, the altitude estimation method is introdued. inally, the proposed method is verified by numerial simulations onsidering sensor noises.

2 2. Estimation Proedure in Standard WI of Opti low his setion first reintrodues the relation between a vehile s motion and opti flow obtained. hen, a standard WI of opti flow proess is explained under the assumption that a amera is plaed at the mass enter of the vehile. 2.. Opti flow Consider a vehile moving a viinity of a elestial surfae, and define two referene frames: an inertial frame t fixed to the surfae, and the vehile fixed frame b whose origin is plaed at the mass enter of a vehile (ig. ). he opti flow is the vetor field of relative veloities between the vehile and the environment. Assume an image sensor is plaed at the mass enter of the vehile, and its image surfae is a sphere of unit radius denoted with S 2. Moreover, there are photoreeptors on the spherial image surfae, and the positions of the photoreeptors are defined with the aimuth and elevation angles; these angles are both measured positive from the x b - and b -axes of the frame b, respetively. hen, the position of a photoreeptor is desribed from two sequential rotations for the aimuth and elevation angles, and, as follows: Q sin os sin sin os. () Consider that the fiduial point on the surfae is stationary to t, and that the referene frame b fixed to the vehile, whih is moving with v = [u v w] and ω = [ p q r ]. hen, the motion parallax vetor Q is defined as the time derivative of Q on the spherial imaging surfae. hen opti flow an be expressed as 8) Q ω Q v v Q Q, (2) where is defined as the inverse of the distane to a point on the elestial surfae. hen, the two omponent of opti flow along the aimuth and elevation diretions an be expressed from Eq. (2) as follows. Q p qs rs us v (3) Q ps q u vs ws (4) where (*) and s(*) indiate os(*) and sin(*), respetively Motion estimation by WI of opti flow he researh on opti flow has started over 50 years ago. 8)-0) However, preise motion estimation by using opti flow is diffiult, beause opti flow is very sensitive to the unertainty of surfae profiles and sensor noises. hus, WI of opti flow has been introdued to utilie a wide range of opti flow for better estimation. )-8) he obtained opti flow is integrated with spae funtions, whih are alled sensitivity funtions. By using the sensitivity funtions, sensor outputs y is obtained as follows: y Q d, (5) 2 S where dsin d d is a solid angle on the spherial image surfae. urthermore, the spae integration in Eq. (5) an be replaed with Riemann sum at the photoreeptor positions without degrading estimation auray, 5) as follow. ig.. Spherial image model for WI of opti flow. k,, y Q k k k k, (6) where k, k and indiates the position and the number of the photoreeptors on the spherial image surfae. or three-dimensional motion estimation, spherial harmonis are frequently used as the sensitivity funtions. urthermore, to distinguish the aimuth and elevational diretional omponents of opti flow, this study uses the following form of sensitivity funtions. 9) j 0 j, (7) 0 j where subsript j indiates the j-th spherial harmonis. hus, by using up to M-th spherial harmonis, the following output vetor is obtained for opti flow omponents measured by photoreeptors. y k k k k Q Q Q Q,, k k k k,, k k M k k,, k k k k,, k k M k k. (8) On the other hand, WI of opti flow virtually supposes a flat, infinite, and horiontal plane instead of unertain surfae profiles. hen, the nearness funtion in Eqs. (3) and (4) an be expressed as follows: s s s s s, (9) where is the altitude from the virtual plane, and are the roll and pith angles of the vehile expressed in the 3-2- Euler angle sequene. hus, the output y in Eq. (8) an 2
3 be also evaluated from the flat surfae assumption by using Eqs. (3), (4) and (9). he following 6-state variables appears linearly in the output equations, x u v w p q r. (0) hus, for the expression y Cx, the standard proedure for WI of opti flow an estimate the 6-motion variables by using the pseudo inverse matrix C as follows: x C y. () 3. Effet of Sensor Position on Opti low In previous setion, image sensors are assumed to be plaed at the mass enter of vehiles, and the opti flow measured by suh ameras is expressed as Eq. (2). Here, the effet of the amera s position off from the mass enter is disussed, and a simple ountermeasure to ope with is introdued. he first and seond terms in the right hand side of Eq. (2) are linear for the angular and translational veloities, respetively. hus, the equation an be rewritten in a simple form as where (, ) Q Aω Bv, (2) A s s s 0, s 0 B s s, and (, ) is the numerator in the right hand side of Eq. (9). he amera s position off from the vehile s mass enter effets in two parts of Eq. (2): altitude and veloity vetor v. he altitude at the amera position is different from that at the mass enter (see ig. 2). hus, in the same way as Eq. (), define the vetor P for the position of the amera w.r.t. b as P P sin os sin sin os, (3) where P indiates the distane from the mass enter, i.e. P P. hen, the altitude at the amera position an be desribed by onsidering the translational matrix from b to t, tb R, as follows. tb R P (4) P ss ss. ig.2. Spherial image plane plaed off from the mass enter of a vehile. ig.3. Camera s translational motion indued by a rotation around the mass enter of a vehile. On the other hand, the amera s veloity vetor v an be expressed from ig. 3 as follows: v vωp. (5) hus, from Eqs. (2) and (5), the opti flow measured by a amera an be expressed by the following relation. (, ) Q Aω Bv PBCω, (6) where is shown in Eq. (4) and C is a 3 3 matrix defined with the amera position. rom Eq. (6), the two omponents of opti flow an be expressed in the same way as Eqs. (3) and (4). herefore, the motion estimation proedure explained in Subsetion 2.2 an be expanded with small modifiations for ameras plaed off from the mass enter of a vehile. 4. Altitude Estimation Added to Motion Estimation or the estimation of the vehile s altitude from the ground, this setion proposes an estimation proedure by using two set of opti flow measured by two ameras. When one amera is assumed to be plaed at the mass enter of a vehile, i.e. P 0, the opti flow is expressed with Eq. (2). hen, define the following state variables instead of Eq. (0). U V W p q r : x V ω, (7) where U u, V v, and W w. hen, sine the vetor x has six omponents, all of the elements an be estimated through a standard proedure for WI of opti flow. urthermore, assume that the vehile has another amera plaed off from the mass enter. hus, the opti flow measured by the seond amera is desribed by Eq. (6). Multiplying in both sides of Eq. (6) leads the following relation: Q Aω Bv PBCω. (8) Here, note that sine the two ameras are boarded on a vehile, the state variables estimated from the seond amera should be same as those from the first one. hus, the V and ω estimated from the first sensor an be substituted into Eq. (8) onsidering v V. hen, the relation is ω P 3
 an be evaluated as a onstant value when the attitude angles and are measured by other sensors). herefore, the altitude an be estimated from Eq. (9).")




![, and its proessing algorithm has been improved to generate 797 59 opti flow vetors for the field of view 45. [deg] 34.6 [deg] with a frame rate of 0 [fps].](/docs-images/93/112620543/images/4-5.jpg "hus, the opti flow in the simulations is assumed to be obtained in the same onditions ass the experimental sensor.")
4 Sine is shown in Eq. (4), the above relation inludes only one unknown parameter (ote, the seond term in n Eq. (4) an be evaluated as a onstant value when the attitude angles and are measured by other sensors). herefore, the altitude an be estimated from Eq. (9). One is obtained, then the translational veloities are alulated from v V. hus, ombining the estimation of ω ω, the altitude information and the six state variables an be estimated from two sets of opti flow measured by two ameras. ote sine the opti flow has two omponents, the altitude information from Eq. (9) an be evaluated in two ways: from the aimuth and from the elevation omponents. he point to be noted in this altitude estimation is explained in the next setion. 5.. umerial Simulation Q Aω BV PBCω. (9) o verify the effetiveness of the proposed altitude estimation proedure added to the motion estimation, this setion shows some typial numerial simulation results. ote, in the simulations, the followings onditionss are adopted for future experimental verifiationn using a miroo air vehile and real opti flow sensors. irst, the altitude and motion estimations of spae vehile are usually u required at tens or hundreds meters height above planet surfaes. However, the vehile altitude in the simulations is set as [m] for the experiments. ext, the opti flow sensor shown in n ig. 4 will be used in the experiments. he sensorr is Optiallow-Z made by ZMP In., and its proessing algorithm has been improved to generate opti flow vetors for the field of view 45. [deg] 34.6 [deg] with a frame rate of 0 [fps]. hus, the opti flow in the simulations is assumed to be obtained in the same onditions ass the experimental sensor. urthermore, the previous study 8) ) has implied that two opti sensors with 90 [deg]-interval inn the aimuth diretion show reasonable estimation aurayy for ig.4. Opti flow sensor used in future experiments. able. Camera positions used in the simulation. s Aimuth angle [deg] Elevation angle [deg] Distane from.m. R [m] Camera Camera able 2. Vehile s motion parameters used in thee simulations. parameters values Altitude [m] Attitude angles (,, ) [deg] (0, 0, 0) Case : ranslational veloities (u, v, w) [m/s] (0.2, 0.2, 0) Case 2: ranslational veloities (u, v, w) [m/s] (0.2, 0, 0) Angular veloities (p, q, r) [rad/s]] (0, 0, 0) ig.5. Vehile s ranslational veloities in two ases. any diretional translational motion of a vehile. hus, the amera positions in i the simulation are supposed as shown in able. his paper shows the estimation results for the vehile s two ases of motions shown in able 2, whih are same exept the translational veloities. igure 5 shows the geometri relations between the ameras and a translational diretions. ote that in eah ase, uniform random noises are added to both thee aimuth and d the elevationn omponents of opti flow vetors. he maximum magnitude of random noises is speifiedd with 30% of the magnitude of the exat opti flow, whih should be measured in an ideal ondition. igure 6 (a) and a (b) show the estimated result of the vehile s altitude in i Case fromm the aimuth and a the elevation omponents of opti o flow, respetively. hus, for better estimation, usually the two estimated altitude should be averaged at eah instant. igure 7 indiates the estimated motion variables for f the averaged altitude information. rom igs. 6 and 7, it iss seen that both the altitude information and motion variables (translational and rotationall veloities) an be estimated with reasonablee auraies by using two ameras. On the other hand, h ig. 8 shows the estimated altitude information in Case 2. In this ase, the estimation auray from the elevation omponent of opti flow is apparently worse. his reason an be explained from ig. 9. As an be seen, the opti flow vetors measured by thee amera 2 have small values in the elevational diretion. herefore, the estimation auray beomes lower. his implies one realisti proedure for the altitude a estimation as follows. irst, evaluate the magnitudes of two omponents of the obtained opti flow vetors, by sampling or by averaging. When both b omponents are not suffiientlyy small, the altitude information is finalied by averaging thee two estimations from the aimuth and elevation omponents. If one omponent iss small enough, only another omponent should be used for f the altitude estimation. 4


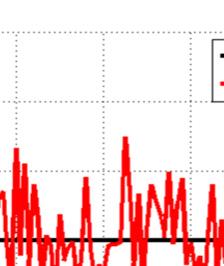


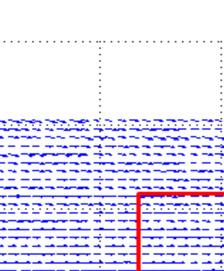


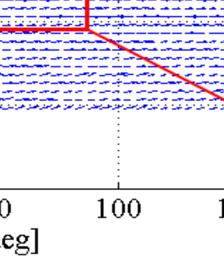













5 ig.6. Vehile ss altitudes estimaation from the aimuth and elevatioon omponents of o opti flow (Casse ). ig.7. Vehile ss motion variablees estimated from m WI of opti floow (Case ). ig.8. Vehile ss altitudes estimaation from the aimuth and elevatioon omponents of o opti flow (Casse 2). ig.9. Opti floow and its enlargeement aptured by y the amera 2 inn Case 2. 5
6 6. Conlusion his paper proposed a proedure to estimate both the vehile s altitude and its translational and rotational veloities by using two ameras. or this purpose, the relation between opti flow and the vehile s motion has been expanded so that they an deal with ameras plaed off from the mass enter of a vehile. hen the estimation proedure has been introdued. he effetiveness of the proposed method has been verified by numerial simulations onsidering sensor noises. Aknowledgments his researh is supported by Japan Soiety for the Pro-motion of Siene (JSPS) KAKEHI Grant-in-Aid for Challenging Exploratory Researh o. 5K4254, and by Sekisui Chemial Grant Program for Researh on Manufaturing Based on Innovations Inspired by ature. Referenes ) Humbert, J. S.,: Bio-Inspired Visuomotor Convergene in avigation and light Control Systems, Ph.D. Dissertation, Mehanial Engineering, Department, California Inst. of ehnology, Pasadena, CA, ) Humbert J. S., Murray R. M. and Dikinson M. H.: A Control-Oriented Analysis of Bio-inspired Visuomotor Convergene, Proeedings of the IEEE Conferene on Deision and Control, pp , ) Humbert J. S. and rye M. A.: Extrating Behaviorally Relevant Retinal Image Motion Cues via Wide-ield Integration, Proeedings of the Amerian Control Conferene, pp , ) Epstein M., Waydo S., et al.: Biologially Inspired eedbak Design for Drosophila light, Proeedings of the Amerian Control Conferene, pp , ) Conroy, J., Gremillion, G., Ranganathan, B. and Humbert, J. S.: Implementation of Wide-ield Integration of Opti low for Autonomous Quadrotor avigation, Autonomous Robots. 27, o. 3, pp , ) Kobayashi., Oishi M., Kinjo Y., Kubo D., and Hokamoto S: Motion estimation of autonomous spaeraft near asteroid using wide-field-integration of opti flow, Proeedings of the 25th International Symposium on Spae light Dynamis, USB, pp.-0, ) akata R., Kobayashi., Bando M., and Hokamoto S.: Altitude and motion estimation for small UAVs by using opti flow, Proeedings of the 8th KAIS-Kyushu University Symposium on Aerospae Engineering, ) Gibson, J., he Pereption of the Visual World, Houghton Mifflin, Oxford, England, U.K., pp. 7 44, ) Koenderink J. J. and van Doorn A. J.: ats on Opti low, Journal of Biologial Cybernetis, 56, pp , ) Egelhaaf, M., Kern, R., Krapp, H. G., Kretberg, J., Kurt, R. and Wareha, A.: eural enoding of behaviourally relevant visual-motion information in the fly, rends in eurosienes, 25, pp , ) Hyslop, A. M., and Humbert, J. S.,: Autonomous avigation in hree-dimensional Urban Environments Using Wide-ield Integration of Opti low, Journal of Guidane, Control, and Dynamis, Vol. 33, o., pp , ) Hyslop A. M., Krapp H. G. and Humbert J. S.: Control theoreti interpretation of diretional motion preferenes in opti flow proessing interneurons, Journal of Biologial Cybernetis, Vol. 03, pp , ) Shoemaker M. A. and Hokamoto S.: Appliation of Wide-ield Integration of Opti low to Proximity Operations and Landing for Spae Exploration Missions, Advanes in the Astronautial Sienes, Vol. 42, pp.23-36, 20. 4) Io, D., Weiss,. and Seidl,.: Constant-Opti-low Lunar Landing: Optimality and Guidane, Journal of Guidane, Control, and Dynamis, 34, o. 5, pp , 20. 5) Shoemaker, M. A. and Hokamoto, S.: Comparison of Integrated and on-integrated Wide-ield Opti low for Vehile avigation, Journal of Guidane, Control, and Dynamis, Vol. 36, o.3, pp ) Sakamoto H., and Hokamoto S.: Attitude Angle Estimation of Spae Probe through Wide-ield Integration of Opti low, ransations of the Japan Soiety for Aeronautial and Spae Sienes, Aerospae ehnology Japan, Vol. 2, o. ists29 pp.pd_4-pd_46, 204 7) Kobayashi., akata R., Bando M., and Hokamoto S.: A ovel Attitude Estimation Method Based on Wide-ield-Integration of Opti low for Autonomous avigation, Proeedings of the 206 Asia-Paifi International Symposium on Aerospae ehnology (APISA), ) Kobayashi., Oishi M., Kinjo Y., and Hokamoto S.: Experimental verifiation of wide-field-integration of opti flow for state estimation, ransations of the Japan Soiety for Aeronautial and Spae Sienes, Aerospae ehnology Japan, Vol.4, o. ists30, Pd_63-Pd_68, ) Kobayashi., Bando M., Hokamoto S.: Improvement of Wide-ield-Integration of Opti low Considering Pratial Sensor Restritions, Journal of Mehanis Engineering and Automation, (aepted) 6
MOTION ESTIMATION OF AUTONOMOUS SPACECRAFT NEAR ASTEROID USING WIDE-FIELD-INTEGRATION OF OPTIC FLOW
 MOTION ESTIMATION OF AUTONOMOUS SPACECRAFT NEAR ASTEROID USING WIDE-FIELD-INTEGRATION OF OPTIC FLOW Naoto Kobayashi (1), Masataka Oishi (1), Yutaka Kinjo (1), Daisuke Kubo (2), and Shinji Hokamoto (1)
MOTION ESTIMATION OF AUTONOMOUS SPACECRAFT NEAR ASTEROID USING WIDE-FIELD-INTEGRATION OF OPTIC FLOW Naoto Kobayashi (1), Masataka Oishi (1), Yutaka Kinjo (1), Daisuke Kubo (2), and Shinji Hokamoto (1)
COMBINED PROBE FOR MACH NUMBER, TEMPERATURE AND INCIDENCE INDICATION
 4 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES COMBINED PROBE FOR MACH NUMBER, TEMPERATURE AND INCIDENCE INDICATION Jiri Nozika*, Josef Adame*, Daniel Hanus** *Department of Fluid Dynamis and
4 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES COMBINED PROBE FOR MACH NUMBER, TEMPERATURE AND INCIDENCE INDICATION Jiri Nozika*, Josef Adame*, Daniel Hanus** *Department of Fluid Dynamis and
Complexity of Regularization RBF Networks
 Complexity of Regularization RBF Networks Mark A Kon Department of Mathematis and Statistis Boston University Boston, MA 02215 mkon@buedu Leszek Plaskota Institute of Applied Mathematis University of Warsaw
Complexity of Regularization RBF Networks Mark A Kon Department of Mathematis and Statistis Boston University Boston, MA 02215 mkon@buedu Leszek Plaskota Institute of Applied Mathematis University of Warsaw
Collinear Equilibrium Points in the Relativistic R3BP when the Bigger Primary is a Triaxial Rigid Body Nakone Bello 1,a and Aminu Abubakar Hussain 2,b
 International Frontier Siene Letters Submitted: 6-- ISSN: 9-8, Vol., pp -6 Aepted: -- doi:.8/www.sipress.om/ifsl.. Online: --8 SiPress Ltd., Switzerland Collinear Equilibrium Points in the Relativisti
International Frontier Siene Letters Submitted: 6-- ISSN: 9-8, Vol., pp -6 Aepted: -- doi:.8/www.sipress.om/ifsl.. Online: --8 SiPress Ltd., Switzerland Collinear Equilibrium Points in the Relativisti
Developing Excel Macros for Solving Heat Diffusion Problems
 Session 50 Developing Exel Maros for Solving Heat Diffusion Problems N. N. Sarker and M. A. Ketkar Department of Engineering Tehnology Prairie View A&M University Prairie View, TX 77446 Abstrat This paper
Session 50 Developing Exel Maros for Solving Heat Diffusion Problems N. N. Sarker and M. A. Ketkar Department of Engineering Tehnology Prairie View A&M University Prairie View, TX 77446 Abstrat This paper
Control Theory association of mathematics and engineering
 Control Theory assoiation of mathematis and engineering Wojieh Mitkowski Krzysztof Oprzedkiewiz Department of Automatis AGH Univ. of Siene & Tehnology, Craow, Poland, Abstrat In this paper a methodology
Control Theory assoiation of mathematis and engineering Wojieh Mitkowski Krzysztof Oprzedkiewiz Department of Automatis AGH Univ. of Siene & Tehnology, Craow, Poland, Abstrat In this paper a methodology
Aircraft CAS Design with Input Saturation Using Dynamic Model Inversion
 International Journal of Control, Automation, and Systems Vol., No. 3, September 003 35 Airraft CAS Design with Input Saturation sing Dynami Model Inversion Sangsoo Lim and Byoung Soo Kim Abstrat: This
International Journal of Control, Automation, and Systems Vol., No. 3, September 003 35 Airraft CAS Design with Input Saturation sing Dynami Model Inversion Sangsoo Lim and Byoung Soo Kim Abstrat: This
Stability Analysis of Orbital Motions around Uniformly Rotating Irregular Asteroids
 Stability Analysis of Orbital Motions around Uniformly Rotating Irregular Asteroids By Xiyun HoU, ) Daniel J. SCHEERES, ) Xiaosheng XIN, ) Jinglang FENG, ) Jingshi TANG, ) Lin LIU, ) ) Shool of Astronomy
Stability Analysis of Orbital Motions around Uniformly Rotating Irregular Asteroids By Xiyun HoU, ) Daniel J. SCHEERES, ) Xiaosheng XIN, ) Jinglang FENG, ) Jingshi TANG, ) Lin LIU, ) ) Shool of Astronomy
Conformal Mapping among Orthogonal, Symmetric, and Skew-Symmetric Matrices
 AAS 03-190 Conformal Mapping among Orthogonal, Symmetri, and Skew-Symmetri Matries Daniele Mortari Department of Aerospae Engineering, Texas A&M University, College Station, TX 77843-3141 Abstrat This
AAS 03-190 Conformal Mapping among Orthogonal, Symmetri, and Skew-Symmetri Matries Daniele Mortari Department of Aerospae Engineering, Texas A&M University, College Station, TX 77843-3141 Abstrat This
Finite-time stabilization of chaotic gyros based on a homogeneous supertwisting-like algorithm
 OP Conferene Series: Materials Siene Engineering PAPER OPEN ACCESS Finite-time stabilization of haoti gyros based on a homogeneous supertwisting-like algorithm To ite this artile: Pitha Khamsuwan et al
OP Conferene Series: Materials Siene Engineering PAPER OPEN ACCESS Finite-time stabilization of haoti gyros based on a homogeneous supertwisting-like algorithm To ite this artile: Pitha Khamsuwan et al
Millennium Relativity Acceleration Composition. The Relativistic Relationship between Acceleration and Uniform Motion
 Millennium Relativity Aeleration Composition he Relativisti Relationship between Aeleration and niform Motion Copyright 003 Joseph A. Rybzyk Abstrat he relativisti priniples developed throughout the six
Millennium Relativity Aeleration Composition he Relativisti Relationship between Aeleration and niform Motion Copyright 003 Joseph A. Rybzyk Abstrat he relativisti priniples developed throughout the six
A Numerical Method For Constructing Geo-Location Isograms
 A Numerial Method For Construting Geo-Loation Isograms Mike Grabbe The Johns Hopkins University Applied Physis Laboratory Laurel, MD Memo Number GVW--U- June 9, 2 Introdution Geo-loation is often performed
A Numerial Method For Construting Geo-Loation Isograms Mike Grabbe The Johns Hopkins University Applied Physis Laboratory Laurel, MD Memo Number GVW--U- June 9, 2 Introdution Geo-loation is often performed
Determination of the Aerodynamic Characteristics of Flying Vehicles Using Method Large Eddy Simulation with Software ANSYS
 Automation, Control and Intelligent Systems 15; 3(6): 118-13 Published online Deember, 15 (http://www.sienepublishinggroup.om//ais) doi: 1.11648/.ais.1536.14 ISSN: 38-5583 (Print); ISSN: 38-5591 (Online)
Automation, Control and Intelligent Systems 15; 3(6): 118-13 Published online Deember, 15 (http://www.sienepublishinggroup.om//ais) doi: 1.11648/.ais.1536.14 ISSN: 38-5583 (Print); ISSN: 38-5591 (Online)
A simple expression for radial distribution functions of pure fluids and mixtures
 A simple expression for radial distribution funtions of pure fluids and mixtures Enrio Matteoli a) Istituto di Chimia Quantistia ed Energetia Moleolare, CNR, Via Risorgimento, 35, 56126 Pisa, Italy G.
A simple expression for radial distribution funtions of pure fluids and mixtures Enrio Matteoli a) Istituto di Chimia Quantistia ed Energetia Moleolare, CNR, Via Risorgimento, 35, 56126 Pisa, Italy G.
Remark 4.1 Unlike Lyapunov theorems, LaSalle s theorem does not require the function V ( x ) to be positive definite.
 to be positive definite.") Leture Remark 4.1 Unlike Lyapunov theorems, LaSalle s theorem does not require the funtion V ( x ) to be positive definite. ost often, our interest will be to show that x( t) as t. For that we will need
Leture Remark 4.1 Unlike Lyapunov theorems, LaSalle s theorem does not require the funtion V ( x ) to be positive definite. ost often, our interest will be to show that x( t) as t. For that we will need
arxiv:gr-qc/ v2 6 Feb 2004
 Hubble Red Shift and the Anomalous Aeleration of Pioneer 0 and arxiv:gr-q/0402024v2 6 Feb 2004 Kostadin Trenčevski Faulty of Natural Sienes and Mathematis, P.O.Box 62, 000 Skopje, Maedonia Abstrat It this
Hubble Red Shift and the Anomalous Aeleration of Pioneer 0 and arxiv:gr-q/0402024v2 6 Feb 2004 Kostadin Trenčevski Faulty of Natural Sienes and Mathematis, P.O.Box 62, 000 Skopje, Maedonia Abstrat It this
The experimental plan of displacement- and frequency-noise free laser interferometer
 7th Edoardo Amaldi Conferene on Gravitational Waves (Amaldi7) Journal of Physis: Conferene Series 122 (2008) 012022 The experimental plan of displaement- and frequeny-noise free laser interferometer K
7th Edoardo Amaldi Conferene on Gravitational Waves (Amaldi7) Journal of Physis: Conferene Series 122 (2008) 012022 The experimental plan of displaement- and frequeny-noise free laser interferometer K
Stabilization of the Precision Positioning Stage Working in the Vacuum Environment by Using the Disturbance Observer
 Proeedings of the 4th IIAE International Conferene on Industrial Appliation Engineering 216 Stabilization of the Preision Positioning Stage Working in the Vauum Environment by Using the Disturbane Observer
Proeedings of the 4th IIAE International Conferene on Industrial Appliation Engineering 216 Stabilization of the Preision Positioning Stage Working in the Vauum Environment by Using the Disturbane Observer
Robust Flight Control Design for a Turn Coordination System with Parameter Uncertainties
 Amerian Journal of Applied Sienes 4 (7): 496-501, 007 ISSN 1546-939 007 Siene Publiations Robust Flight ontrol Design for a urn oordination System with Parameter Unertainties 1 Ari Legowo and Hiroshi Okubo
Amerian Journal of Applied Sienes 4 (7): 496-501, 007 ISSN 1546-939 007 Siene Publiations Robust Flight ontrol Design for a urn oordination System with Parameter Unertainties 1 Ari Legowo and Hiroshi Okubo
Where as discussed previously we interpret solutions to this partial differential equation in the weak sense: b
 Consider the pure initial value problem for a homogeneous system of onservation laws with no soure terms in one spae dimension: Where as disussed previously we interpret solutions to this partial differential
Consider the pure initial value problem for a homogeneous system of onservation laws with no soure terms in one spae dimension: Where as disussed previously we interpret solutions to this partial differential
Electromagnetic radiation of the travelling spin wave propagating in an antiferromagnetic plate. Exact solution.
 arxiv:physis/99536v1 [physis.lass-ph] 15 May 1999 Eletromagneti radiation of the travelling spin wave propagating in an antiferromagneti plate. Exat solution. A.A.Zhmudsky November 19, 16 Abstrat The exat
arxiv:physis/99536v1 [physis.lass-ph] 15 May 1999 Eletromagneti radiation of the travelling spin wave propagating in an antiferromagneti plate. Exat solution. A.A.Zhmudsky November 19, 16 Abstrat The exat
Speed-feedback Direct-drive Control of a Low-speed Transverse Flux-type Motor with Large Number of Poles for Ship Propulsion
 Speed-feedbak Diret-drive Control of a Low-speed Transverse Flux-type Motor with Large Number of Poles for Ship Propulsion Y. Yamamoto, T. Nakamura 2, Y. Takada, T. Koseki, Y. Aoyama 3, and Y. Iwaji 3
Speed-feedbak Diret-drive Control of a Low-speed Transverse Flux-type Motor with Large Number of Poles for Ship Propulsion Y. Yamamoto, T. Nakamura 2, Y. Takada, T. Koseki, Y. Aoyama 3, and Y. Iwaji 3
19 Lecture 19: Cosmic Microwave Background Radiation
 PHYS 652: Astrophysis 97 19 Leture 19: Cosmi Mirowave Bakground Radiation Observe the void its emptiness emits a pure light. Chuang-tzu The Big Piture: Today we are disussing the osmi mirowave bakground
PHYS 652: Astrophysis 97 19 Leture 19: Cosmi Mirowave Bakground Radiation Observe the void its emptiness emits a pure light. Chuang-tzu The Big Piture: Today we are disussing the osmi mirowave bakground
The Antimatter Photon Drive A Relativistic Propulsion System
 The Antimatter Photon Drive A Relativisti Propulsion System Darrel Smith & Jonathan Webb Embry-Riddle Aeronautial University Presott, AZ 8630 This paper desribes a propulsion system that derives its thrust
The Antimatter Photon Drive A Relativisti Propulsion System Darrel Smith & Jonathan Webb Embry-Riddle Aeronautial University Presott, AZ 8630 This paper desribes a propulsion system that derives its thrust
An Adaptive Optimization Approach to Active Cancellation of Repeated Transient Vibration Disturbances
 An aptive Optimization Approah to Ative Canellation of Repeated Transient Vibration Disturbanes David L. Bowen RH Lyon Corp / Aenteh, 33 Moulton St., Cambridge, MA 138, U.S.A., owen@lyonorp.om J. Gregory
An aptive Optimization Approah to Ative Canellation of Repeated Transient Vibration Disturbanes David L. Bowen RH Lyon Corp / Aenteh, 33 Moulton St., Cambridge, MA 138, U.S.A., owen@lyonorp.om J. Gregory
Numerical simulation of a one-dimensional shock tube problem at supercritical fluid conditions
 International Journal of Physial Sienes Vol. 3 (1), pp. 314-30, Deember, 008 Available online at http://www.aademijournals.org/ijps ISSN 199-1950 008 Aademi Journals Full ength esearh Paper Numerial simulation
International Journal of Physial Sienes Vol. 3 (1), pp. 314-30, Deember, 008 Available online at http://www.aademijournals.org/ijps ISSN 199-1950 008 Aademi Journals Full ength esearh Paper Numerial simulation
Nonlinear attitude control of a tether-connected multi-satellite in three-dimensional space
 IEEE ransations on Aerospae and Eletroni Systems Vol. 46 o. 4 pp. 95--968 Otober onlinear attitude ontrol of a tether-onneted multi-satellite in three-dimensional spae Insu Chang Student ember IEEE Sang-Young
IEEE ransations on Aerospae and Eletroni Systems Vol. 46 o. 4 pp. 95--968 Otober onlinear attitude ontrol of a tether-onneted multi-satellite in three-dimensional spae Insu Chang Student ember IEEE Sang-Young
Effect of magnetization process on levitation force between a superconducting. disk and a permanent magnet
 Effet of magnetization proess on levitation fore between a superonduting disk and a permanent magnet L. Liu, Y. Hou, C.Y. He, Z.X. Gao Department of Physis, State Key Laboratory for Artifiial Mirostruture
Effet of magnetization proess on levitation fore between a superonduting disk and a permanent magnet L. Liu, Y. Hou, C.Y. He, Z.X. Gao Department of Physis, State Key Laboratory for Artifiial Mirostruture
Effect of Rotation, Magnetic Field and Initial Stresses on Propagation of Plane Waves in Transversely Isotropic Dissipative Half Space
 Applied Mathematis 4 7- http://dx.doi.org/.436/am..48a5 Published Online August (http://www.sirp.org/journal/am) Effet of otation Magneti Field and Initial Stresses on Propagation of Plane Waves in Transversely
Applied Mathematis 4 7- http://dx.doi.org/.436/am..48a5 Published Online August (http://www.sirp.org/journal/am) Effet of otation Magneti Field and Initial Stresses on Propagation of Plane Waves in Transversely
Fiber Optic Cable Transmission Losses with Perturbation Effects
 Fiber Opti Cable Transmission Losses with Perturbation Effets Kampanat Namngam 1*, Preeha Yupapin 2 and Pakkinee Chitsakul 1 1 Department of Mathematis and Computer Siene, Faulty of Siene, King Mongkut
Fiber Opti Cable Transmission Losses with Perturbation Effets Kampanat Namngam 1*, Preeha Yupapin 2 and Pakkinee Chitsakul 1 1 Department of Mathematis and Computer Siene, Faulty of Siene, King Mongkut
). In accordance with the Lorentz transformations for the space-time coordinates of the same event, the space coordinates become
. In accordance with the Lorentz transformations for the space-time coordinates of the same event, the space coordinates become") Relativity and quantum mehanis: Jorgensen 1 revisited 1. Introdution Bernhard Rothenstein, Politehnia University of Timisoara, Physis Department, Timisoara, Romania. brothenstein@gmail.om Abstrat. We first
Relativity and quantum mehanis: Jorgensen 1 revisited 1. Introdution Bernhard Rothenstein, Politehnia University of Timisoara, Physis Department, Timisoara, Romania. brothenstein@gmail.om Abstrat. We first
Analysis of discretization in the direct simulation Monte Carlo
 PHYSICS OF FLUIDS VOLUME 1, UMBER 1 OCTOBER Analysis of disretization in the diret simulation Monte Carlo iolas G. Hadjionstantinou a) Department of Mehanial Engineering, Massahusetts Institute of Tehnology,
PHYSICS OF FLUIDS VOLUME 1, UMBER 1 OCTOBER Analysis of disretization in the diret simulation Monte Carlo iolas G. Hadjionstantinou a) Department of Mehanial Engineering, Massahusetts Institute of Tehnology,
A NONLILEAR CONTROLLER FOR SHIP AUTOPILOTS
 Vietnam Journal of Mehanis, VAST, Vol. 4, No. (), pp. A NONLILEAR CONTROLLER FOR SHIP AUTOPILOTS Le Thanh Tung Hanoi University of Siene and Tehnology, Vietnam Abstrat. Conventional ship autopilots are
Vietnam Journal of Mehanis, VAST, Vol. 4, No. (), pp. A NONLILEAR CONTROLLER FOR SHIP AUTOPILOTS Le Thanh Tung Hanoi University of Siene and Tehnology, Vietnam Abstrat. Conventional ship autopilots are
Planning with Uncertainty in Position: an Optimal Planner
 Planning with Unertainty in Position: an Optimal Planner Juan Pablo Gonzalez Anthony (Tony) Stentz CMU-RI -TR-04-63 The Robotis Institute Carnegie Mellon University Pittsburgh, Pennsylvania 15213 Otober
Planning with Unertainty in Position: an Optimal Planner Juan Pablo Gonzalez Anthony (Tony) Stentz CMU-RI -TR-04-63 The Robotis Institute Carnegie Mellon University Pittsburgh, Pennsylvania 15213 Otober
Comparison of Alternative Equivalent Circuits of Induction Motor with Real Machine Data
 Comparison of Alternative Equivalent Ciruits of Indution Motor with Real Mahine Data J. radna, J. auer, S. Fligl and V. Hlinovsky Abstrat The algorithms based on separated ontrol of the motor flux and
Comparison of Alternative Equivalent Ciruits of Indution Motor with Real Mahine Data J. radna, J. auer, S. Fligl and V. Hlinovsky Abstrat The algorithms based on separated ontrol of the motor flux and
A Combination of BIM and BEM for efficiently analyzing optical. elements
 A Combination of BIM and BEM for effiiently analyzing optial elements SUN Fang, LIU Juan, ZHANG Guo-ting, HU Chuan-fei, SU Xiaoxing Institute of Lightwave Tehnology, hool of eletronis and information engineering,
A Combination of BIM and BEM for effiiently analyzing optial elements SUN Fang, LIU Juan, ZHANG Guo-ting, HU Chuan-fei, SU Xiaoxing Institute of Lightwave Tehnology, hool of eletronis and information engineering,
Chapter 2: Solution of First order ODE
 0 Chapter : Solution of irst order ODE Se. Separable Equations The differential equation of the form that is is alled separable if f = h g; In order to solve it perform the following steps: Rewrite the
0 Chapter : Solution of irst order ODE Se. Separable Equations The differential equation of the form that is is alled separable if f = h g; In order to solve it perform the following steps: Rewrite the
ALGORITHMS FOR SAFE SPACECRAFT PROXIMITY OPERATIONS
 AAS-2007-107 ALGORITHMS FOR SAFE SPACECRAFT PROXIMITY OPERATIONS INTRODUCTION David E. Gaylor *, Brent William Barbee Emergent Spae Tehnologies, In., Greenbelt, MD, 20770 Future missions involving in-spae
AAS-2007-107 ALGORITHMS FOR SAFE SPACECRAFT PROXIMITY OPERATIONS INTRODUCTION David E. Gaylor *, Brent William Barbee Emergent Spae Tehnologies, In., Greenbelt, MD, 20770 Future missions involving in-spae
DIGITAL DISTANCE RELAYING SCHEME FOR PARALLEL TRANSMISSION LINES DURING INTER-CIRCUIT FAULTS
 CHAPTER 4 DIGITAL DISTANCE RELAYING SCHEME FOR PARALLEL TRANSMISSION LINES DURING INTER-CIRCUIT FAULTS 4.1 INTRODUCTION Around the world, environmental and ost onsiousness are foring utilities to install
CHAPTER 4 DIGITAL DISTANCE RELAYING SCHEME FOR PARALLEL TRANSMISSION LINES DURING INTER-CIRCUIT FAULTS 4.1 INTRODUCTION Around the world, environmental and ost onsiousness are foring utilities to install
INTRO VIDEOS. LESSON 9.5: The Doppler Effect
 DEVIL PHYSICS BADDEST CLASS ON CAMPUS IB PHYSICS INTRO VIDEOS Big Bang Theory of the Doppler Effet Doppler Effet LESSON 9.5: The Doppler Effet 1. Essential Idea: The Doppler Effet desribes the phenomenon
DEVIL PHYSICS BADDEST CLASS ON CAMPUS IB PHYSICS INTRO VIDEOS Big Bang Theory of the Doppler Effet Doppler Effet LESSON 9.5: The Doppler Effet 1. Essential Idea: The Doppler Effet desribes the phenomenon
Applying CIECAM02 for Mobile Display Viewing Conditions
 Applying CIECAM2 for Mobile Display Viewing Conditions YungKyung Park*, ChangJun Li*, M.. Luo*, Youngshin Kwak**, Du-Sik Park **, and Changyeong Kim**; * University of Leeds, Colour Imaging Lab, UK*, **
Applying CIECAM2 for Mobile Display Viewing Conditions YungKyung Park*, ChangJun Li*, M.. Luo*, Youngshin Kwak**, Du-Sik Park **, and Changyeong Kim**; * University of Leeds, Colour Imaging Lab, UK*, **
Sensor management for PRF selection in the track-before-detect context
 Sensor management for PRF seletion in the tra-before-detet ontext Fotios Katsilieris, Yvo Boers, and Hans Driessen Thales Nederland B.V. Haasbergerstraat 49, 7554 PA Hengelo, the Netherlands Email: {Fotios.Katsilieris,
Sensor management for PRF seletion in the tra-before-detet ontext Fotios Katsilieris, Yvo Boers, and Hans Driessen Thales Nederland B.V. Haasbergerstraat 49, 7554 PA Hengelo, the Netherlands Email: {Fotios.Katsilieris,
A Spatiotemporal Approach to Passive Sound Source Localization
 A Spatiotemporal Approah Passive Sound Soure Loalization Pasi Pertilä, Mikko Parviainen, Teemu Korhonen and Ari Visa Institute of Signal Proessing Tampere University of Tehnology, P.O.Box 553, FIN-330,
A Spatiotemporal Approah Passive Sound Soure Loalization Pasi Pertilä, Mikko Parviainen, Teemu Korhonen and Ari Visa Institute of Signal Proessing Tampere University of Tehnology, P.O.Box 553, FIN-330,
Optimization of Statistical Decisions for Age Replacement Problems via a New Pivotal Quantity Averaging Approach
 Amerian Journal of heoretial and Applied tatistis 6; 5(-): -8 Published online January 7, 6 (http://www.sienepublishinggroup.om/j/ajtas) doi:.648/j.ajtas.s.65.4 IN: 36-8999 (Print); IN: 36-96 (Online)
Amerian Journal of heoretial and Applied tatistis 6; 5(-): -8 Published online January 7, 6 (http://www.sienepublishinggroup.om/j/ajtas) doi:.648/j.ajtas.s.65.4 IN: 36-8999 (Print); IN: 36-96 (Online)
A model for measurement of the states in a coupled-dot qubit
 A model for measurement of the states in a oupled-dot qubit H B Sun and H M Wiseman Centre for Quantum Computer Tehnology Centre for Quantum Dynamis Griffith University Brisbane 4 QLD Australia E-mail:
A model for measurement of the states in a oupled-dot qubit H B Sun and H M Wiseman Centre for Quantum Computer Tehnology Centre for Quantum Dynamis Griffith University Brisbane 4 QLD Australia E-mail:
Critical Reflections on the Hafele and Keating Experiment
 Critial Refletions on the Hafele and Keating Experiment W.Nawrot In 1971 Hafele and Keating performed their famous experiment whih onfirmed the time dilation predited by SRT by use of marosopi loks. As
Critial Refletions on the Hafele and Keating Experiment W.Nawrot In 1971 Hafele and Keating performed their famous experiment whih onfirmed the time dilation predited by SRT by use of marosopi loks. As
Orthogonal Complement Based Divide-and-Conquer Algorithm (O-DCA) for Constrained Multibody Systems
 for Constrained Multibody Systems") Orthogonal Complement Based Divide-and-Conquer Algorithm (O-DCA) for Constrained Multibody Systems Rudranarayan M. Mukherjee, Kurt S. Anderson Computational Dynamis Laboratory Department of Mehanial Aerospae
Orthogonal Complement Based Divide-and-Conquer Algorithm (O-DCA) for Constrained Multibody Systems Rudranarayan M. Mukherjee, Kurt S. Anderson Computational Dynamis Laboratory Department of Mehanial Aerospae
ARTICLE IN PRESS. International Journal of Mechanical Sciences
 International Journal of Mehanial Sienes 51 (009) 6 55 Contents lists available at SieneDiret International Journal of Mehanial Sienes journal homepage: www.elsevier.om/loate/ijmesi Exat solutions for
International Journal of Mehanial Sienes 51 (009) 6 55 Contents lists available at SieneDiret International Journal of Mehanial Sienes journal homepage: www.elsevier.om/loate/ijmesi Exat solutions for
Singular Event Detection
 Singular Event Detetion Rafael S. Garía Eletrial Engineering University of Puerto Rio at Mayagüez Rafael.Garia@ee.uprm.edu Faulty Mentor: S. Shankar Sastry Researh Supervisor: Jonathan Sprinkle Graduate
Singular Event Detetion Rafael S. Garía Eletrial Engineering University of Puerto Rio at Mayagüez Rafael.Garia@ee.uprm.edu Faulty Mentor: S. Shankar Sastry Researh Supervisor: Jonathan Sprinkle Graduate
EXACT TRAVELLING WAVE SOLUTIONS FOR THE GENERALIZED KURAMOTO-SIVASHINSKY EQUATION
 Journal of Mathematial Sienes: Advanes and Appliations Volume 3, 05, Pages -3 EXACT TRAVELLING WAVE SOLUTIONS FOR THE GENERALIZED KURAMOTO-SIVASHINSKY EQUATION JIAN YANG, XIAOJUAN LU and SHENGQIANG TANG
Journal of Mathematial Sienes: Advanes and Appliations Volume 3, 05, Pages -3 EXACT TRAVELLING WAVE SOLUTIONS FOR THE GENERALIZED KURAMOTO-SIVASHINSKY EQUATION JIAN YANG, XIAOJUAN LU and SHENGQIANG TANG
A Queueing Model for Call Blending in Call Centers
 A Queueing Model for Call Blending in Call Centers Sandjai Bhulai and Ger Koole Vrije Universiteit Amsterdam Faulty of Sienes De Boelelaan 1081a 1081 HV Amsterdam The Netherlands E-mail: {sbhulai, koole}@s.vu.nl
A Queueing Model for Call Blending in Call Centers Sandjai Bhulai and Ger Koole Vrije Universiteit Amsterdam Faulty of Sienes De Boelelaan 1081a 1081 HV Amsterdam The Netherlands E-mail: {sbhulai, koole}@s.vu.nl
Sufficient Conditions for a Flexible Manufacturing System to be Deadlocked
 Paper 0, INT 0 Suffiient Conditions for a Flexile Manufaturing System to e Deadloked Paul E Deering, PhD Department of Engineering Tehnology and Management Ohio University deering@ohioedu Astrat In reent
Paper 0, INT 0 Suffiient Conditions for a Flexile Manufaturing System to e Deadloked Paul E Deering, PhD Department of Engineering Tehnology and Management Ohio University deering@ohioedu Astrat In reent
A NEW FLEXIBLE BODY DYNAMIC FORMULATION FOR BEAM STRUCTURES UNDERGOING LARGE OVERALL MOTION IIE THREE-DIMENSIONAL CASE. W. J.
 A NEW FLEXIBLE BODY DYNAMIC FORMULATION FOR BEAM STRUCTURES UNDERGOING LARGE OVERALL MOTION IIE THREE-DIMENSIONAL CASE W. J. Haering* Senior Projet Engineer General Motors Corporation Warren, Mihigan R.
A NEW FLEXIBLE BODY DYNAMIC FORMULATION FOR BEAM STRUCTURES UNDERGOING LARGE OVERALL MOTION IIE THREE-DIMENSIONAL CASE W. J. Haering* Senior Projet Engineer General Motors Corporation Warren, Mihigan R.
An Integrated Architecture of Adaptive Neural Network Control for Dynamic Systems
 An Integrated Arhiteture of Adaptive Neural Network Control for Dynami Systems Robert L. Tokar 2 Brian D.MVey2 'Center for Nonlinear Studies, 2Applied Theoretial Physis Division Los Alamos National Laboratory,
An Integrated Arhiteture of Adaptive Neural Network Control for Dynami Systems Robert L. Tokar 2 Brian D.MVey2 'Center for Nonlinear Studies, 2Applied Theoretial Physis Division Los Alamos National Laboratory,
A new method of measuring similarity between two neutrosophic soft sets and its application in pattern recognition problems
 Neutrosophi Sets and Systems, Vol. 8, 05 63 A new method of measuring similarity between two neutrosophi soft sets and its appliation in pattern reognition problems Anjan Mukherjee, Sadhan Sarkar, Department
Neutrosophi Sets and Systems, Vol. 8, 05 63 A new method of measuring similarity between two neutrosophi soft sets and its appliation in pattern reognition problems Anjan Mukherjee, Sadhan Sarkar, Department
Advances in Radio Science
 Advanes in adio Siene 2003) 1: 99 104 Copernius GmbH 2003 Advanes in adio Siene A hybrid method ombining the FDTD and a time domain boundary-integral equation marhing-on-in-time algorithm A Beker and V
Advanes in adio Siene 2003) 1: 99 104 Copernius GmbH 2003 Advanes in adio Siene A hybrid method ombining the FDTD and a time domain boundary-integral equation marhing-on-in-time algorithm A Beker and V
The gravitational phenomena without the curved spacetime
 The gravitational phenomena without the urved spaetime Mirosław J. Kubiak Abstrat: In this paper was presented a desription of the gravitational phenomena in the new medium, different than the urved spaetime,
The gravitational phenomena without the urved spaetime Mirosław J. Kubiak Abstrat: In this paper was presented a desription of the gravitational phenomena in the new medium, different than the urved spaetime,
Aharonov-Bohm effect. Dan Solomon.
 Aharonov-Bohm effet. Dan Solomon. In the figure the magneti field is onfined to a solenoid of radius r 0 and is direted in the z- diretion, out of the paper. The solenoid is surrounded by a barrier that
Aharonov-Bohm effet. Dan Solomon. In the figure the magneti field is onfined to a solenoid of radius r 0 and is direted in the z- diretion, out of the paper. The solenoid is surrounded by a barrier that
ELECTROMAGNETIC WAVES WITH NONLINEAR DISPERSION LAW. P. М. Меdnis
 ELECTROMAGNETIC WAVES WITH NONLINEAR DISPERSION LAW P. М. Меdnis Novosibirs State Pedagogial University, Chair of the General and Theoretial Physis, Russia, 636, Novosibirs,Viljujsy, 8 e-mail: pmednis@inbox.ru
ELECTROMAGNETIC WAVES WITH NONLINEAR DISPERSION LAW P. М. Меdnis Novosibirs State Pedagogial University, Chair of the General and Theoretial Physis, Russia, 636, Novosibirs,Viljujsy, 8 e-mail: pmednis@inbox.ru
Application of the Dyson-type boson mapping for low-lying electron excited states in molecules
 Prog. Theor. Exp. Phys. 05, 063I0 ( pages DOI: 0.093/ptep/ptv068 Appliation of the Dyson-type boson mapping for low-lying eletron exited states in moleules adao Ohkido, and Makoto Takahashi Teaher-training
Prog. Theor. Exp. Phys. 05, 063I0 ( pages DOI: 0.093/ptep/ptv068 Appliation of the Dyson-type boson mapping for low-lying eletron exited states in moleules adao Ohkido, and Makoto Takahashi Teaher-training
Hankel Optimal Model Order Reduction 1
 Massahusetts Institute of Tehnology Department of Eletrial Engineering and Computer Siene 6.245: MULTIVARIABLE CONTROL SYSTEMS by A. Megretski Hankel Optimal Model Order Redution 1 This leture overs both
Massahusetts Institute of Tehnology Department of Eletrial Engineering and Computer Siene 6.245: MULTIVARIABLE CONTROL SYSTEMS by A. Megretski Hankel Optimal Model Order Redution 1 This leture overs both
arxiv:gr-qc/ v7 14 Dec 2003
 Propagation of light in non-inertial referene frames Vesselin Petkov Siene College, Conordia University 1455 De Maisonneuve Boulevard West Montreal, Quebe, Canada H3G 1M8 vpetkov@alor.onordia.a arxiv:gr-q/9909081v7
Propagation of light in non-inertial referene frames Vesselin Petkov Siene College, Conordia University 1455 De Maisonneuve Boulevard West Montreal, Quebe, Canada H3G 1M8 vpetkov@alor.onordia.a arxiv:gr-q/9909081v7
New Potential of the. Positron-Emission Tomography
 International Journal of Modern Physis and Appliation 6; 3(: 39- http://www.aasit.org/journal/ijmpa ISSN: 375-387 New Potential of the Positron-Emission Tomography Andrey N. olobuev, Eugene S. Petrov,
International Journal of Modern Physis and Appliation 6; 3(: 39- http://www.aasit.org/journal/ijmpa ISSN: 375-387 New Potential of the Positron-Emission Tomography Andrey N. olobuev, Eugene S. Petrov,
9 Geophysics and Radio-Astronomy: VLBI VeryLongBaseInterferometry
 9 Geophysis and Radio-Astronomy: VLBI VeryLongBaseInterferometry VLBI is an interferometry tehnique used in radio astronomy, in whih two or more signals, oming from the same astronomial objet, are reeived
9 Geophysis and Radio-Astronomy: VLBI VeryLongBaseInterferometry VLBI is an interferometry tehnique used in radio astronomy, in whih two or more signals, oming from the same astronomial objet, are reeived
Exploring the feasibility of on-site earthquake early warning using close-in records of the 2007 Noto Hanto earthquake
 Exploring the feasibility of on-site earthquake early warning using lose-in reords of the 2007 Noto Hanto earthquake Yih-Min Wu 1 and Hiroo Kanamori 2 1. Department of Geosienes, National Taiwan University,
Exploring the feasibility of on-site earthquake early warning using lose-in reords of the 2007 Noto Hanto earthquake Yih-Min Wu 1 and Hiroo Kanamori 2 1. Department of Geosienes, National Taiwan University,
General Closed-form Analytical Expressions of Air-gap Inductances for Surfacemounted Permanent Magnet and Induction Machines
 General Closed-form Analytial Expressions of Air-gap Indutanes for Surfaemounted Permanent Magnet and Indution Mahines Ronghai Qu, Member, IEEE Eletroni & Photoni Systems Tehnologies General Eletri Company
General Closed-form Analytial Expressions of Air-gap Indutanes for Surfaemounted Permanent Magnet and Indution Mahines Ronghai Qu, Member, IEEE Eletroni & Photoni Systems Tehnologies General Eletri Company
ANTI-SATURATION DYNAMIC SURFACE CONTROL FOR SPACECRAFT TERMINAL SAFE APPROACH BASED ON COMMAND FILTER. Guanqun Wu, Shenmin Song and Jingguang Sun
 International Journal of Innovative Computing, Information and Control ICIC International 2018 ISSN 1349-4198 Volume 14, Number 1, February 2018 pp. 33 52 ANTI-SATURATION DYNAMIC SURFACE CONTROL FOR SPACECRAFT
International Journal of Innovative Computing, Information and Control ICIC International 2018 ISSN 1349-4198 Volume 14, Number 1, February 2018 pp. 33 52 ANTI-SATURATION DYNAMIC SURFACE CONTROL FOR SPACECRAFT
Relativistic effects in earth-orbiting Doppler lidar return signals
 3530 J. Opt. So. Am. A/ Vol. 4, No. 11/ November 007 Neil Ashby Relativisti effets in earth-orbiting Doppler lidar return signals Neil Ashby 1,, * 1 Department of Physis, University of Colorado, Boulder,
3530 J. Opt. So. Am. A/ Vol. 4, No. 11/ November 007 Neil Ashby Relativisti effets in earth-orbiting Doppler lidar return signals Neil Ashby 1,, * 1 Department of Physis, University of Colorado, Boulder,
Distance and Orientation Measurement of a Flat Surface by a Single Underwater Acoustic Transducer
 Distane and Orientation Measurement of a Flat Surfae by a Single Underwater Aousti Transduer Vinent Creuze To ite this version: Vinent Creuze. Distane and Orientation Measurement of a Flat Surfae by a
Distane and Orientation Measurement of a Flat Surfae by a Single Underwater Aousti Transduer Vinent Creuze To ite this version: Vinent Creuze. Distane and Orientation Measurement of a Flat Surfae by a
Measurements of aerosol phase function and vertical backscattering coefficient using a charge-coupled device side-scatter lidar
 Measurements of aerosol phase funtion and vertial baksattering oeffiient using a harge-oupled devie side-satter lidar Zongming Tao, 1,2 ong Liu, 2,* Zhenhu Wang, 2 Xiaomin Ma, 1 Qinge Zhang, 1 Chenbo Xie,
Measurements of aerosol phase funtion and vertial baksattering oeffiient using a harge-oupled devie side-satter lidar Zongming Tao, 1,2 ong Liu, 2,* Zhenhu Wang, 2 Xiaomin Ma, 1 Qinge Zhang, 1 Chenbo Xie,
The Possibility of FTL Space Travel by using the Quantum Tunneling Effect through the Light Barrier
 ISSN: 19-98 The Possibility of FTL Spae Travel by using the Quantum Tunneling Effet through the Light Barrier Musha T Advaned Si-Teh Researh Organization, -11-7-61, Namiki, Kanazawa-Ku, Yokohama 65, Japan
ISSN: 19-98 The Possibility of FTL Spae Travel by using the Quantum Tunneling Effet through the Light Barrier Musha T Advaned Si-Teh Researh Organization, -11-7-61, Namiki, Kanazawa-Ku, Yokohama 65, Japan
Searching All Approximate Covers and Their Distance using Finite Automata
 Searhing All Approximate Covers and Their Distane using Finite Automata Ondřej Guth, Bořivoj Melihar, and Miroslav Balík České vysoké učení tehniké v Praze, Praha, CZ, {gutho1,melihar,alikm}@fel.vut.z
Searhing All Approximate Covers and Their Distane using Finite Automata Ondřej Guth, Bořivoj Melihar, and Miroslav Balík České vysoké učení tehniké v Praze, Praha, CZ, {gutho1,melihar,alikm}@fel.vut.z
Dynamic Programming and Multi Objective Linear Programming approaches
 0 NSP Vol. () (0), 9 Dynami Programming and Multi Objetive Linear Programming approahes P. K. De and Amita Bhinher Department o Mathematis, National Institute o Tehnology SILCHAR - 788 00 (Assam) India
0 NSP Vol. () (0), 9 Dynami Programming and Multi Objetive Linear Programming approahes P. K. De and Amita Bhinher Department o Mathematis, National Institute o Tehnology SILCHAR - 788 00 (Assam) India
Einstein s Three Mistakes in Special Relativity Revealed. Copyright Joseph A. Rybczyk
 Einstein s Three Mistakes in Speial Relativity Revealed Copyright Joseph A. Rybzyk Abstrat When the evidene supported priniples of eletromagneti propagation are properly applied, the derived theory is
Einstein s Three Mistakes in Speial Relativity Revealed Copyright Joseph A. Rybzyk Abstrat When the evidene supported priniples of eletromagneti propagation are properly applied, the derived theory is
Gravitomagnetic Effects in the Kerr-Newman Spacetime
 Advaned Studies in Theoretial Physis Vol. 10, 2016, no. 2, 81-87 HIKARI Ltd, www.m-hikari.om http://dx.doi.org/10.12988/astp.2016.512114 Gravitomagneti Effets in the Kerr-Newman Spaetime A. Barros Centro
Advaned Studies in Theoretial Physis Vol. 10, 2016, no. 2, 81-87 HIKARI Ltd, www.m-hikari.om http://dx.doi.org/10.12988/astp.2016.512114 Gravitomagneti Effets in the Kerr-Newman Spaetime A. Barros Centro
Two Points Hybrid Block Method for Solving First Order Fuzzy Differential Equations
 Journal of Soft Computing and Appliations 2016 No.1 (2016) 43-53 Available online at www.ispas.om/jsa Volume 2016, Issue 1, Year 2016 Artile ID jsa-00083, 11 Pages doi:10.5899/2016/jsa-00083 Researh Artile
Journal of Soft Computing and Appliations 2016 No.1 (2016) 43-53 Available online at www.ispas.om/jsa Volume 2016, Issue 1, Year 2016 Artile ID jsa-00083, 11 Pages doi:10.5899/2016/jsa-00083 Researh Artile
JAST 2015 M.U.C. Women s College, Burdwan ISSN a peer reviewed multidisciplinary research journal Vol.-01, Issue- 01
 JAST 05 M.U.C. Women s College, Burdwan ISSN 395-353 -a peer reviewed multidisiplinary researh journal Vol.-0, Issue- 0 On Type II Fuzzy Parameterized Soft Sets Pinaki Majumdar Department of Mathematis,
JAST 05 M.U.C. Women s College, Burdwan ISSN 395-353 -a peer reviewed multidisiplinary researh journal Vol.-0, Issue- 0 On Type II Fuzzy Parameterized Soft Sets Pinaki Majumdar Department of Mathematis,
22.54 Neutron Interactions and Applications (Spring 2004) Chapter 6 (2/24/04) Energy Transfer Kernel F(E E')
 Chapter 6 (2/24/04) Energy Transfer Kernel F(E E')") 22.54 Neutron Interations and Appliations (Spring 2004) Chapter 6 (2/24/04) Energy Transfer Kernel F(E E') Referenes -- J. R. Lamarsh, Introdution to Nulear Reator Theory (Addison-Wesley, Reading, 1966),
22.54 Neutron Interations and Appliations (Spring 2004) Chapter 6 (2/24/04) Energy Transfer Kernel F(E E') Referenes -- J. R. Lamarsh, Introdution to Nulear Reator Theory (Addison-Wesley, Reading, 1966),
RELAXED STABILIZATION CONDITIONS FOR SWITCHING T-S FUZZY SYSTEMS WITH PRACTICAL CONSTRAINTS. Received January 2011; revised July 2011
 International Journal of Innovative Computing, Information and Control ICIC International 2012 ISSN 139-198 Volume 8, Number 6, June 2012 pp. 133 15 RELAXED STABILIZATION CONDITIONS FOR SWITCHING T-S FUZZY
International Journal of Innovative Computing, Information and Control ICIC International 2012 ISSN 139-198 Volume 8, Number 6, June 2012 pp. 133 15 RELAXED STABILIZATION CONDITIONS FOR SWITCHING T-S FUZZY
Supplementary information for: All-optical signal processing using dynamic Brillouin gratings
 Supplementary information for: All-optial signal proessing using dynami Brillouin gratings Maro Santagiustina, Sanghoon Chin 2, Niolay Primerov 2, Leonora Ursini, Lu Thévena 2 Department of Information
Supplementary information for: All-optial signal proessing using dynami Brillouin gratings Maro Santagiustina, Sanghoon Chin 2, Niolay Primerov 2, Leonora Ursini, Lu Thévena 2 Department of Information
CALCULATION OF NONLINEAR TUNE SHIFT USING BEAM POSITION MEASUREMENT RESULTS
 International Journal of Modern Physis A Vol. 24, No. 5 (2009) 974 986 World Sientifi Publishing Company CALCULATION OF NONLINEAR TUNE SHIFT USING BEAM POSITION MEASUREMENT RESULTS PAVEL SNOPOK, MARTIN
International Journal of Modern Physis A Vol. 24, No. 5 (2009) 974 986 World Sientifi Publishing Company CALCULATION OF NONLINEAR TUNE SHIFT USING BEAM POSITION MEASUREMENT RESULTS PAVEL SNOPOK, MARTIN
Chapter 2 Lecture 8 Longitudinal stick fixed static stability and control 5 Topics
 Flight dynamis II Stability and ontrol hapter 2 Leture 8 Longitudinal stik fied stati stability and ontrol 5 Topis 2.6 ontributions of power plant to mg and mα 2.6.1 Diret ontributions of powerplant to
Flight dynamis II Stability and ontrol hapter 2 Leture 8 Longitudinal stik fied stati stability and ontrol 5 Topis 2.6 ontributions of power plant to mg and mα 2.6.1 Diret ontributions of powerplant to
EFFECTS OF COUPLE STRESSES ON PURE SQUEEZE EHL MOTION OF CIRCULAR CONTACTS
 -Tehnial Note- EFFECTS OF COUPLE STRESSES ON PURE SQUEEZE EHL MOTION OF CIRCULAR CONTACTS H.-M. Chu * W.-L. Li ** Department of Mehanial Engineering Yung-Ta Institute of Tehnology & Commere Ping-Tung,
-Tehnial Note- EFFECTS OF COUPLE STRESSES ON PURE SQUEEZE EHL MOTION OF CIRCULAR CONTACTS H.-M. Chu * W.-L. Li ** Department of Mehanial Engineering Yung-Ta Institute of Tehnology & Commere Ping-Tung,
AC : A GRAPHICAL USER INTERFACE (GUI) FOR A UNIFIED APPROACH FOR CONTINUOUS-TIME COMPENSATOR DESIGN
 FOR A UNIFIED APPROACH FOR CONTINUOUS-TIME COMPENSATOR DESIGN") AC 28-1986: A GRAPHICAL USER INTERFACE (GUI) FOR A UNIFIED APPROACH FOR CONTINUOUS-TIME COMPENSATOR DESIGN Minh Cao, Wihita State University Minh Cao ompleted his Bahelor s of Siene degree at Wihita State
AC 28-1986: A GRAPHICAL USER INTERFACE (GUI) FOR A UNIFIED APPROACH FOR CONTINUOUS-TIME COMPENSATOR DESIGN Minh Cao, Wihita State University Minh Cao ompleted his Bahelor s of Siene degree at Wihita State
Armenian Theory of Special Relativity (Illustrated) Robert Nazaryan 1 and Haik Nazaryan 2
 Robert Nazaryan 1 and Haik Nazaryan 2") 29606 Robert Nazaryan Haik Nazaryan/ Elixir Nulear & Radiation Phys. 78 (205) 29606-2967 Available online at www.elixirpublishers.om (Elixir International Journal) Nulear Radiation Physis Elixir Nulear
29606 Robert Nazaryan Haik Nazaryan/ Elixir Nulear & Radiation Phys. 78 (205) 29606-2967 Available online at www.elixirpublishers.om (Elixir International Journal) Nulear Radiation Physis Elixir Nulear
Kinematics and inverse dynamics analysis for a general 3-PRS spatial parallel mechanism Yangmin Li and Qingsong Xu
 Robotia (2005) volume 23, pp. 219 229. 2005 Cambridge University Press doi:10.1017/s0263574704000797 Printed in the United Kingdom Kinematis and inverse dynamis analysis for a general 3-PRS spatial parallel
Robotia (2005) volume 23, pp. 219 229. 2005 Cambridge University Press doi:10.1017/s0263574704000797 Printed in the United Kingdom Kinematis and inverse dynamis analysis for a general 3-PRS spatial parallel
The First Integral Method for Solving a System of Nonlinear Partial Differential Equations
 ISSN 179-889 (print), 179-897 (online) International Journal of Nonlinear Siene Vol.5(008) No.,pp.111-119 The First Integral Method for Solving a System of Nonlinear Partial Differential Equations Ahmed
ISSN 179-889 (print), 179-897 (online) International Journal of Nonlinear Siene Vol.5(008) No.,pp.111-119 The First Integral Method for Solving a System of Nonlinear Partial Differential Equations Ahmed
Vibration Control of Smart Structure Using Sliding Mode Control with Observer
 JOURNAL OF COMPUERS, VOL. 7, NO., FEBRUARY Vibration Control of Smart Struture Using Sliding Mode Control with Observer Junfeng Hu Shool of Mehanial & Eletrial Engineering, Jiangxi University of Siene
JOURNAL OF COMPUERS, VOL. 7, NO., FEBRUARY Vibration Control of Smart Struture Using Sliding Mode Control with Observer Junfeng Hu Shool of Mehanial & Eletrial Engineering, Jiangxi University of Siene
Acoustic Attenuation Performance of Helicoidal Resonator Due to Distance Change from Different Cross-sectional Elements of Cylindrical Ducts
 Exerpt rom the Proeedings o the COMSOL Conerene 1 Paris Aousti Attenuation Perormane o Helioidal Resonator Due to Distane Change rom Dierent Cross-setional Elements o Cylindrial Duts Wojieh ŁAPKA* Division
Exerpt rom the Proeedings o the COMSOL Conerene 1 Paris Aousti Attenuation Perormane o Helioidal Resonator Due to Distane Change rom Dierent Cross-setional Elements o Cylindrial Duts Wojieh ŁAPKA* Division
Frequency Domain Analysis of Concrete Gravity Dam-Reservoir Systems by Wavenumber Approach
 Frequeny Domain Analysis of Conrete Gravity Dam-Reservoir Systems by Wavenumber Approah V. Lotfi & A. Samii Department of Civil and Environmental Engineering, Amirkabir University of Tehnology, Tehran,
Frequeny Domain Analysis of Conrete Gravity Dam-Reservoir Systems by Wavenumber Approah V. Lotfi & A. Samii Department of Civil and Environmental Engineering, Amirkabir University of Tehnology, Tehran,
Contact Block Reduction Method for Ballistic Quantum Transport with Semi-empirical sp3d5s* Tight Binding band models
 Purdue University Purdue e-pubs Other Nanotehnology Publiations Birk Nanotehnology Center -2-28 Contat Redution Method for Ballisti Quantum Transport with Semi-empirial sp3d5s* Tight Binding band models
Purdue University Purdue e-pubs Other Nanotehnology Publiations Birk Nanotehnology Center -2-28 Contat Redution Method for Ballisti Quantum Transport with Semi-empirial sp3d5s* Tight Binding band models
The Unified Geometrical Theory of Fields and Particles
 Applied Mathematis, 014, 5, 347-351 Published Online February 014 (http://www.sirp.org/journal/am) http://dx.doi.org/10.436/am.014.53036 The Unified Geometrial Theory of Fields and Partiles Amagh Nduka
Applied Mathematis, 014, 5, 347-351 Published Online February 014 (http://www.sirp.org/journal/am) http://dx.doi.org/10.436/am.014.53036 The Unified Geometrial Theory of Fields and Partiles Amagh Nduka
Development of Fuzzy Extreme Value Theory. Populations
 Applied Mathematial Sienes, Vol. 6, 0, no. 7, 58 5834 Development of Fuzzy Extreme Value Theory Control Charts Using α -uts for Sewed Populations Rungsarit Intaramo Department of Mathematis, Faulty of
Applied Mathematial Sienes, Vol. 6, 0, no. 7, 58 5834 Development of Fuzzy Extreme Value Theory Control Charts Using α -uts for Sewed Populations Rungsarit Intaramo Department of Mathematis, Faulty of
11 General Relativistic Models for Propagation
 Tehnial No. 32 11 General Relativisti Models for Propagation 11.1 VLBI Time Delay 11.1.1 Historial Bakground To resolve differenes between numerous proedures used in the 1980s to model the VLBI delay,
Tehnial No. 32 11 General Relativisti Models for Propagation 11.1 VLBI Time Delay 11.1.1 Historial Bakground To resolve differenes between numerous proedures used in the 1980s to model the VLBI delay,
Variation Based Online Travel Time Prediction Using Clustered Neural Networks
 Variation Based Online Travel Time Predition Using lustered Neural Networks Jie Yu, Gang-Len hang, H.W. Ho and Yue Liu Abstrat-This paper proposes a variation-based online travel time predition approah
Variation Based Online Travel Time Predition Using lustered Neural Networks Jie Yu, Gang-Len hang, H.W. Ho and Yue Liu Abstrat-This paper proposes a variation-based online travel time predition approah
Lyapunov Exponents of Second Order Linear Systems
 Reent Researhes in Computational Intelligene and Information Seurity Lyapunov Exponents of Seond Order Linear Systems ADAM CZORNIK and ALEKSANDER NAWRAT Department of Automati Control Silesian Tehnial
Reent Researhes in Computational Intelligene and Information Seurity Lyapunov Exponents of Seond Order Linear Systems ADAM CZORNIK and ALEKSANDER NAWRAT Department of Automati Control Silesian Tehnial
755. A survey of Hopf bifurcation analysis in nonlinear railway wheelset dynamics
 755. A survey of Hopf bifuration analysis in nonlinear railway wheelset dynamis Hamid M. Sedighi, Kourosh H. Shirazi Department of Mehanial Engineering, Shahid Chamran University, Ahvaz, Iran E-mail: hmsedighi@gmail.om,
755. A survey of Hopf bifuration analysis in nonlinear railway wheelset dynamis Hamid M. Sedighi, Kourosh H. Shirazi Department of Mehanial Engineering, Shahid Chamran University, Ahvaz, Iran E-mail: hmsedighi@gmail.om,
Identification of a Nonlinear Aeroelastic Aircraft Wing Model
 Identifiation of a Nonlinear Aeroelasti Airraft Wing Model Christopher M. Rihards * University of Louisville, Louisville, Kentuky 9 Martin J. Brenner NASA Dryden Flight Researh Center, Edwards, California
Identifiation of a Nonlinear Aeroelasti Airraft Wing Model Christopher M. Rihards * University of Louisville, Louisville, Kentuky 9 Martin J. Brenner NASA Dryden Flight Researh Center, Edwards, California
Nonreversibility of Multiple Unicast Networks
 Nonreversibility of Multiple Uniast Networks Randall Dougherty and Kenneth Zeger September 27, 2005 Abstrat We prove that for any finite direted ayli network, there exists a orresponding multiple uniast
Nonreversibility of Multiple Uniast Networks Randall Dougherty and Kenneth Zeger September 27, 2005 Abstrat We prove that for any finite direted ayli network, there exists a orresponding multiple uniast
Chapter 3 Lecture 7. Drag polar 2. Topics. Chapter-3
 hapter 3 eture 7 Drag polar Topis 3..3 Summary of lift oeffiient, drag oeffiient, pithing moment oeffiient, entre of pressure and aerodynami entre of an airfoil 3..4 Examples of pressure oeffiient distributions
hapter 3 eture 7 Drag polar Topis 3..3 Summary of lift oeffiient, drag oeffiient, pithing moment oeffiient, entre of pressure and aerodynami entre of an airfoil 3..4 Examples of pressure oeffiient distributions