Improving the Testing Rate of Electronic Circuit Boards
|
|
|
- Bethanie Verity Glenn
- 5 years ago
- Views:
Transcription
1 Electronic Circuit August 19, 2011
2 Problem statement Acculogic Inc. manufactures systems for testing (ECBs). The systems are almost entirely automatic but require some human input. The clients of Acculogic Inc. use those systems to test batches of ECBs, and testing an ECB requires the system to carry out thousands of tests. To carry out a test, the system must locate the test points on an actual board. When carrying out the tests, the system may produce false negatives, i.e., report a failure where there is none. A false negative occurs because a probe does not hit the required test point.

3 Flying Probe Systems
4 Problem statement (continued) Acculogic s systems must be improved in order to minimize the number of false negatives. Although the boards are made after a pattern stored in the computer, the precise location of a given test point varies from board to board. Finding the locations of test points will become more challenging as the electronic devices become smaller. In what follows ideal point will refer to a point stored in the computer and actual point to a point of the board being tested. We are looking for a mapping (or matching) between the set of ideal points and the set of actual points.
5 The current procedure: fiducial training Three fiducial points are chosen; their ideal coordinates are known. An expert looks for (and finds) the corresponding fiducial marks on the first board of the batch. An actual fiducial point is at the center of its fiducial mark. Reference pictures (i.e., pictures of the fiducial marks) are taken.
6 The current procedure: fiducial finding Once the fiducial training has been completed, every board (including the first one) is processed in turn automatically. Pictures of fiducial points are taken (their approximate locations being known through ideal coordinates). The actual coordinates of the fiducial points are obtained by making corrections after comparing the above pictures with the reference pictures. The mapping between the ideal fiducial points and the actual points can be extended (in a unique way) to an affine transformation between the ideal board and the current board. All the tests on the current board are carried out and the failed tests are recorded.
7 Assumption Printing errors on the board are spatially correlated, so that we can define local maps between the ideal and actual boards. This assumption cannot be tested yet.
8 How to improve fiducial training We are proposing a new algorithm for selecting the fiducial points. 1. Four fiducial points are identified in the four corners of the board, respectively. 2. Each subgroup of three fiducial points gives rise to an affine transformation. This gives us a first group of affine transformations. 3. Construct local maps using this group of transformations. 4. Use the Next Best Pose (NBP) algorithm to select an additional fiducial point. 5. If the new fiducial point is correctly predicted by the local maps, the algorithm stops. If not, go to Step 3.
9 How to improve fiducial finding 1. Select the next fiducial point (following the same order as for the first board). 2. Take a picture and compare it with the reference picture. 3. Compute the needed correction to hit the test mark and update the local maps. 4. Go back to Step 1. Currently, the image comparison is performed with a black-box least squares method. We think it can be improved.


10 The Ideal Circuit Board The following is the output from autocad. A real circuit board isn t so nice.
11 A possible approach: feature detection 1. Create grayscale image. 2. Apply a threshold filter to obtain an image of 0s and 1s. 3. Identify the connected components and extract geometric properties for each component like centroid, area, Euler number, etc.
12 First example: A bunch of circles



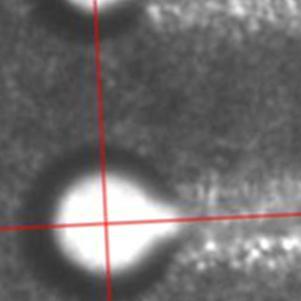
13 Second example: a close-up of that circuit board


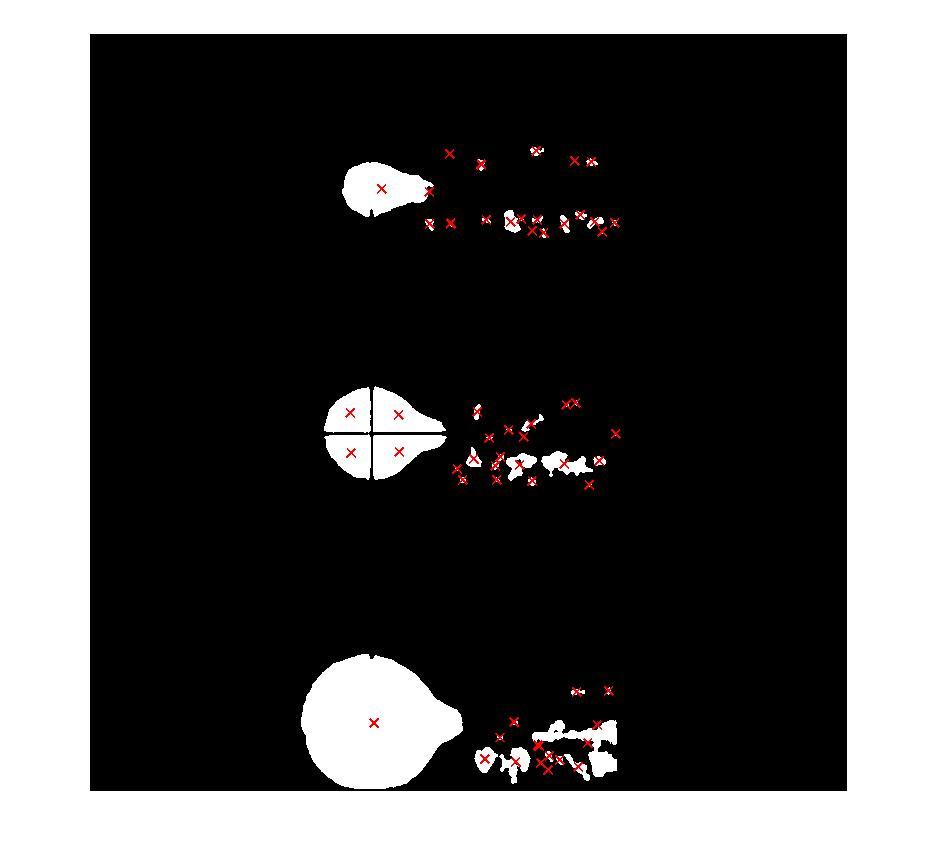
14 Third example: a real close-up of a real board

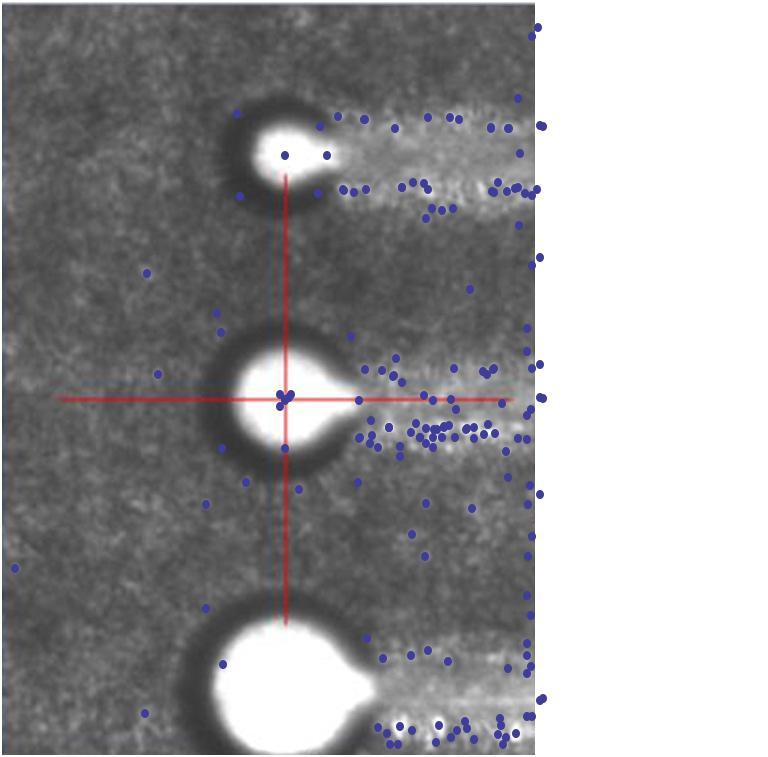
15 Second Approach: the Scale-Invariant Feature Transform (SIFT) An All-Canadian Product! From UBC! Thank you David Lowe for inventing it! We gratefully thank Professor Sébastien Roy for a crash course on SIFT and the affiliated Speeded Up Robust Feature (SURF).

16 A second, less blurry example
17 General idea Identify key points in the image in such a way that two images of the same thing will have the same key points even if the images are taken from different angles, different illuminations, different distances, etc. 1. For each image, identify the image s key points. 2. For each key point in the first image, try to find a corresponding key point in the second image.
18
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
Introduction to Machine Learning Prof. Sudeshna Sarkar Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur
 Introduction to Machine Learning Prof. Sudeshna Sarkar Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur Module 2 Lecture 05 Linear Regression Good morning, welcome
Introduction to Machine Learning Prof. Sudeshna Sarkar Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur Module 2 Lecture 05 Linear Regression Good morning, welcome
Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Overview. Harris interest points. Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points
 Scale & affine invariant interest points") Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
Single pyro altimeter AltiUno SMT operating instructions
 Single pyro altimeter AltiUno SMT operating instructions Version date Author Comments 1.0 09/03/2014 Boris du Reau Initial version 1.1 11/03/2014 Boris du Reau Updated version 1.2 27/03/2014 Boris du Reau
Single pyro altimeter AltiUno SMT operating instructions Version date Author Comments 1.0 09/03/2014 Boris du Reau Initial version 1.1 11/03/2014 Boris du Reau Updated version 1.2 27/03/2014 Boris du Reau
Detectors part II Descriptors
 EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE
 SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
Orientation Map Based Palmprint Recognition
 Orientation Map Based Palmprint Recognition (BM) 45 Orientation Map Based Palmprint Recognition B. H. Shekar, N. Harivinod bhshekar@gmail.com, harivinodn@gmail.com India, Mangalore University, Department
Orientation Map Based Palmprint Recognition (BM) 45 Orientation Map Based Palmprint Recognition B. H. Shekar, N. Harivinod bhshekar@gmail.com, harivinodn@gmail.com India, Mangalore University, Department
Bananagrams Tile Extraction and Letter Recognition for Rapid Word Suggestion
 Bananagrams Tile Extraction and Letter Recognition for Rapid Word Suggestion Steven Leung, Steffi Perkins, and Colleen Rhoades Department of Bioengineering Stanford University Stanford, CA Abstract Bananagrams
Bananagrams Tile Extraction and Letter Recognition for Rapid Word Suggestion Steven Leung, Steffi Perkins, and Colleen Rhoades Department of Bioengineering Stanford University Stanford, CA Abstract Bananagrams
Given a feature in I 1, how to find the best match in I 2?
 Feature Matching 1 Feature matching Given a feature in I 1, how to find the best match in I 2? 1. Define distance function that compares two descriptors 2. Test all the features in I 2, find the one with
Feature Matching 1 Feature matching Given a feature in I 1, how to find the best match in I 2? 1. Define distance function that compares two descriptors 2. Test all the features in I 2, find the one with
Graphical User Interfaces for Emittance and Correlation Plot. Henrik Loos
 Graphical User Interfaces for Emittance and Correlation Plot Common GUI Features Overview Files Configs Measure Data Point Export Common GUI Features Save Saves the present data. Auto-generated file name
Graphical User Interfaces for Emittance and Correlation Plot Common GUI Features Overview Files Configs Measure Data Point Export Common GUI Features Save Saves the present data. Auto-generated file name
What is Image Deblurring?
 What is Image Deblurring? When we use a camera, we want the recorded image to be a faithful representation of the scene that we see but every image is more or less blurry, depending on the circumstances.
What is Image Deblurring? When we use a camera, we want the recorded image to be a faithful representation of the scene that we see but every image is more or less blurry, depending on the circumstances.
Measuring Keepers S E S S I O N 1. 5 A
 S E S S I O N 1. 5 A Measuring Keepers Math Focus Points Naming, notating, and telling time to the hour on a digital and an analog clock Understanding the meaning of at least in the context of linear measurement
S E S S I O N 1. 5 A Measuring Keepers Math Focus Points Naming, notating, and telling time to the hour on a digital and an analog clock Understanding the meaning of at least in the context of linear measurement
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Alpha spectrometry systems. A users perspective. George Ham. 26 th May Date Month Year
 Alpha spectrometry systems A users perspective George Ham Date Month Year 26 th May 2005 Centre for Radiation, Chemical and Environmental Hazards Radiation Protection Division formerly the National Radiological
Alpha spectrometry systems A users perspective George Ham Date Month Year 26 th May 2005 Centre for Radiation, Chemical and Environmental Hazards Radiation Protection Division formerly the National Radiological
Blob Detection CSC 767
 Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
11+ MATHS SAMPLE EXAMINATION PAPER
 Alleyn s 11+ MATHS SAMPLE EXAMINATION PAPER 2 Calculators MAY NOT be used. Show your working, as there may be marks given for working out. One hour. Co-educational excellence MULTIPLE CHOICE Circle the
Alleyn s 11+ MATHS SAMPLE EXAMINATION PAPER 2 Calculators MAY NOT be used. Show your working, as there may be marks given for working out. One hour. Co-educational excellence MULTIPLE CHOICE Circle the
Fibonacci mod k. In this section, we examine the question of which terms of the Fibonacci sequence have a given divisor k.
 Fibonacci mod k I start by giving out a table of the first 0 Fibonacci numbers actually the first, because we begin with u 0 =0 (and I have a reason for that which will soon become apparent). Okay, which
Fibonacci mod k I start by giving out a table of the first 0 Fibonacci numbers actually the first, because we begin with u 0 =0 (and I have a reason for that which will soon become apparent). Okay, which
Lesson 04. KAZE, Non-linear diffusion filtering, ORB, MSER. Ing. Marek Hrúz, Ph.D.
 Lesson 04 KAZE, Non-linear diffusion filtering, ORB, MSER Ing. Marek Hrúz, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Lesson 04 KAZE ORB: an efficient alternative
Lesson 04 KAZE, Non-linear diffusion filtering, ORB, MSER Ing. Marek Hrúz, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Lesson 04 KAZE ORB: an efficient alternative
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
AS 102 Lab The Luminosity of the Sun
 AS 102 Lab The Luminosity of the Sun The Problem SOHO Image of the Sun The luminosity of a light source whether it is a star or the Sun or a light bulb is a measure of the actual light output of the source.
AS 102 Lab The Luminosity of the Sun The Problem SOHO Image of the Sun The luminosity of a light source whether it is a star or the Sun or a light bulb is a measure of the actual light output of the source.
Image matching. by Diva Sian. by swashford
 Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
Rel: Estimating Digital System Reliability
 Rel 1 Rel: Estimating Digital System Reliability Qualitatively, the reliability of a digital system is the likelihood that it works correctly when you need it. Marketing and sa les people like to say that
Rel 1 Rel: Estimating Digital System Reliability Qualitatively, the reliability of a digital system is the likelihood that it works correctly when you need it. Marketing and sa les people like to say that
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Clojure Concurrency Constructs, Part Two. CSCI 5828: Foundations of Software Engineering Lecture 13 10/07/2014
 Clojure Concurrency Constructs, Part Two CSCI 5828: Foundations of Software Engineering Lecture 13 10/07/2014 1 Goals Cover the material presented in Chapter 4, of our concurrency textbook In particular,
Clojure Concurrency Constructs, Part Two CSCI 5828: Foundations of Software Engineering Lecture 13 10/07/2014 1 Goals Cover the material presented in Chapter 4, of our concurrency textbook In particular,
SIFT keypoint detection. D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (2), pp , 2004.
, pp , 2004.") SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Probability and Stochastic Processes: A Friendly Introduction for Electrical and Computer Engineers Roy D. Yates and David J.
 Probability and Stochastic Processes: A Friendly Introduction for Electrical and Computer Engineers Roy D. Yates and David J. Goodman Problem Solutions : Yates and Goodman,.6.3.7.7.8..9.6 3.. 3.. and 3..
Probability and Stochastic Processes: A Friendly Introduction for Electrical and Computer Engineers Roy D. Yates and David J. Goodman Problem Solutions : Yates and Goodman,.6.3.7.7.8..9.6 3.. 3.. and 3..
Advances in Computer Vision. Prof. Bill Freeman. Image and shape descriptors. Readings: Mikolajczyk and Schmid; Belongie et al.
 6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
Electricity Grudge Ball
 Electricity Grudge Ball Grudge Ball Rules Each group gets a question. If they get it right they automatically get to erase two X's from the board. They can take it from one team or split it. They can not
Electricity Grudge Ball Grudge Ball Rules Each group gets a question. If they get it right they automatically get to erase two X's from the board. They can take it from one team or split it. They can not
HOW TO THINK ABOUT POINTS AND VECTORS WITHOUT COORDINATES. Math 225
 HOW TO THINK ABOUT POINTS AND VECTORS WITHOUT COORDINATES Math 225 Points Look around. What do you see? You see objects: a chair here, a table there, a book on the table. These objects occupy locations,
HOW TO THINK ABOUT POINTS AND VECTORS WITHOUT COORDINATES Math 225 Points Look around. What do you see? You see objects: a chair here, a table there, a book on the table. These objects occupy locations,
LIMS Stock Control for ISO 15189
 LIMS for ISO 15189 Fiona Byrne Senior Genetic Technologist Our Story Reasons for developing an electronic LIMS-based How we use our How it meets UKAS ISO 15189 standards How we address Reagent Verification
LIMS for ISO 15189 Fiona Byrne Senior Genetic Technologist Our Story Reasons for developing an electronic LIMS-based How we use our How it meets UKAS ISO 15189 standards How we address Reagent Verification
SYMMETRIES AND COUNTING
 SYMMETRIES AND COUNTING I. COUNTING BRACELETS Problem 1. (a) How many different ways can you color the circles in this figure black and white? (There are pages with copies of this figure attached at the
SYMMETRIES AND COUNTING I. COUNTING BRACELETS Problem 1. (a) How many different ways can you color the circles in this figure black and white? (There are pages with copies of this figure attached at the
Extract useful building blocks: blobs. the same image like for the corners
 Extract useful building blocks: blobs the same image like for the corners Here were the corners... Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g=
Extract useful building blocks: blobs the same image like for the corners Here were the corners... Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g=
Solving and Graphing Inequalities
 Solving and Graphing Inequalities Graphing Simple Inequalities: x > 3 When finding the solution for an equation we get one answer for x. (There is only one number that satisfies the equation.) For 3x 5
Solving and Graphing Inequalities Graphing Simple Inequalities: x > 3 When finding the solution for an equation we get one answer for x. (There is only one number that satisfies the equation.) For 3x 5
Statistical Reliability Modeling of Field Failures Works!
 Statistical Reliability Modeling of Field Failures Works! David Trindade, Ph.D. Distinguished Principal Engineer Sun Microsystems, Inc. Quality & Productivity Research Conference 1 Photo by Dave Trindade
Statistical Reliability Modeling of Field Failures Works! David Trindade, Ph.D. Distinguished Principal Engineer Sun Microsystems, Inc. Quality & Productivity Research Conference 1 Photo by Dave Trindade
SURF Features. Jacky Baltes Dept. of Computer Science University of Manitoba WWW:
 SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
Face detection and recognition. Detection Recognition Sally
 Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
B: Know Circuit Vocabulary: Multiple Choice Level 1 Prerequisites: None Points to: Know Circuit Vocabulary (Short Answer)
") B: Know Circuit Vocabulary: Multiple Choice Level 1 Prerequisites: None Points to: Know Circuit Vocabulary (Short Answer) Objectives: - Memorize the definitions of voltage, current resistance, and power.
B: Know Circuit Vocabulary: Multiple Choice Level 1 Prerequisites: None Points to: Know Circuit Vocabulary (Short Answer) Objectives: - Memorize the definitions of voltage, current resistance, and power.
Introduction to Artificial Intelligence Midterm 2. CS 188 Spring You have approximately 2 hours and 50 minutes.
 CS 188 Spring 2014 Introduction to Artificial Intelligence Midterm 2 You have approximately 2 hours and 50 minutes. The exam is closed book, closed notes except your two-page crib sheet. Mark your answers
CS 188 Spring 2014 Introduction to Artificial Intelligence Midterm 2 You have approximately 2 hours and 50 minutes. The exam is closed book, closed notes except your two-page crib sheet. Mark your answers
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
SIFT: Scale Invariant Feature Transform
 1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
Ergodicity in data assimilation methods
 Ergodicity in data assimilation methods David Kelly Andy Majda Xin Tong Courant Institute New York University New York NY www.dtbkelly.com April 15, 2016 ETH Zurich David Kelly (CIMS) Data assimilation
Ergodicity in data assimilation methods David Kelly Andy Majda Xin Tong Courant Institute New York University New York NY www.dtbkelly.com April 15, 2016 ETH Zurich David Kelly (CIMS) Data assimilation
Introduction to AI Learning Bayesian networks. Vibhav Gogate
 Introduction to AI Learning Bayesian networks Vibhav Gogate Inductive Learning in a nutshell Given: Data Examples of a function (X, F(X)) Predict function F(X) for new examples X Discrete F(X): Classification
Introduction to AI Learning Bayesian networks Vibhav Gogate Inductive Learning in a nutshell Given: Data Examples of a function (X, F(X)) Predict function F(X) for new examples X Discrete F(X): Classification
MITOCW MIT18_02SCF10Rec_50_300k
 MITOCW MIT18_02SCF10Rec_50_300k CHRISTINE Welcome back to recitation. In this video, I'd like us to work on the following problem. BREINER: So the problem is as follows. For which of the following vector
MITOCW MIT18_02SCF10Rec_50_300k CHRISTINE Welcome back to recitation. In this video, I'd like us to work on the following problem. BREINER: So the problem is as follows. For which of the following vector
Blobs & Scale Invariance
 Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Physics 2020 Lab 5 Intro to Circuits
 Physics 2020 Lab 5 Intro to Circuits Name Section Tues Wed Thu 8am 10am 12pm 2pm 4pm Introduction In this lab, we will be using The Circuit Construction Kit (CCK). CCK is a computer simulation that allows
Physics 2020 Lab 5 Intro to Circuits Name Section Tues Wed Thu 8am 10am 12pm 2pm 4pm Introduction In this lab, we will be using The Circuit Construction Kit (CCK). CCK is a computer simulation that allows
Scale-space image processing
 Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
A Course in Machine Learning
 A Course in Machine Learning Hal Daumé III 3 THE PERCEPTRON Learning Objectives: Describe the biological motivation behind the perceptron. Classify learning algorithms based on whether they are error-driven
A Course in Machine Learning Hal Daumé III 3 THE PERCEPTRON Learning Objectives: Describe the biological motivation behind the perceptron. Classify learning algorithms based on whether they are error-driven
Does Air Have Mass? 1.3 Investigate
 Does Air Have Mass? A water bottle with no water in it is sitting on the table. Your friend says the bottle is empty. What would you tell your friend about the bottle? Would you describe the bottle as
Does Air Have Mass? A water bottle with no water in it is sitting on the table. Your friend says the bottle is empty. What would you tell your friend about the bottle? Would you describe the bottle as
Chapter 3: The Derivative in Graphing and Applications
 Chapter 3: The Derivative in Graphing and Applications Summary: The main purpose of this chapter is to use the derivative as a tool to assist in the graphing of functions and for solving optimization problems.
Chapter 3: The Derivative in Graphing and Applications Summary: The main purpose of this chapter is to use the derivative as a tool to assist in the graphing of functions and for solving optimization problems.
Week 1: Number Theory - Euler Phi Function, Order and Primitive Roots. 1 Greatest Common Divisor and the Euler Phi Function
 2010 IMO Summer Training: Number Theory 1 Week 1: Number Theory - Euler Phi Function, Orer an Primitive Roots 1 Greatest Common Divisor an the Euler Phi Function Consier the following problem. Exercise
2010 IMO Summer Training: Number Theory 1 Week 1: Number Theory - Euler Phi Function, Orer an Primitive Roots 1 Greatest Common Divisor an the Euler Phi Function Consier the following problem. Exercise
average speed instantaneous origin resultant average velocity position particle model scalar
 REPRESENTING MOTION Vocabulary Review Write the term that correctly completes the statement. Use each term once. average speed instantaneous origin resultant average velocity position particle model scalar
REPRESENTING MOTION Vocabulary Review Write the term that correctly completes the statement. Use each term once. average speed instantaneous origin resultant average velocity position particle model scalar
Theory and Problems of Signals and Systems
 SCHAUM'S OUTLINES OF Theory and Problems of Signals and Systems HWEI P. HSU is Professor of Electrical Engineering at Fairleigh Dickinson University. He received his B.S. from National Taiwan University
SCHAUM'S OUTLINES OF Theory and Problems of Signals and Systems HWEI P. HSU is Professor of Electrical Engineering at Fairleigh Dickinson University. He received his B.S. from National Taiwan University
Numbers and symbols WHOLE NUMBERS: 1, 2, 3, 4, 5, 6, 7, 8, 9... INTEGERS: -4, -3, -2, -1, 0, 1, 2, 3, 4...
 Numbers and symbols The expression of numerical quantities is something we tend to take for granted. This is both a good and a bad thing in the study of electronics. It is good, in that we're accustomed
Numbers and symbols The expression of numerical quantities is something we tend to take for granted. This is both a good and a bad thing in the study of electronics. It is good, in that we're accustomed
PHYS208 RECITATIONS PROBLEMS: Week 2. Gauss s Law
 Gauss s Law Prob.#1 Prob.#2 Prob.#3 Prob.#4 Prob.#5 Total Your Name: Your UIN: Your section# These are the problems that you and a team of other 2-3 students will be asked to solve during the recitation
Gauss s Law Prob.#1 Prob.#2 Prob.#3 Prob.#4 Prob.#5 Total Your Name: Your UIN: Your section# These are the problems that you and a team of other 2-3 students will be asked to solve during the recitation
Solar Cells. Steven Thedford Redan High School. Objective. Student will be able to determine the maximum powerpoint and efficiency of a solar. cell.
 Solar Cells Steven Thedford Redan High School Objective cell. Student will be able to determine the maximum powerpoint and efficiency of a solar Background Information Solar cells, photovoltaic cells,
Solar Cells Steven Thedford Redan High School Objective cell. Student will be able to determine the maximum powerpoint and efficiency of a solar Background Information Solar cells, photovoltaic cells,
Lecture 6 April
 Stats 300C: Theory of Statistics Spring 2017 Lecture 6 April 14 2017 Prof. Emmanuel Candes Scribe: S. Wager, E. Candes 1 Outline Agenda: From global testing to multiple testing 1. Testing the global null
Stats 300C: Theory of Statistics Spring 2017 Lecture 6 April 14 2017 Prof. Emmanuel Candes Scribe: S. Wager, E. Candes 1 Outline Agenda: From global testing to multiple testing 1. Testing the global null
1 Review of the dot product
 Any typographical or other corrections about these notes are welcome. Review of the dot product The dot product on R n is an operation that takes two vectors and returns a number. It is defined by n u
Any typographical or other corrections about these notes are welcome. Review of the dot product The dot product on R n is an operation that takes two vectors and returns a number. It is defined by n u
LAB 2 - ONE DIMENSIONAL MOTION
 Name Date Partners L02-1 LAB 2 - ONE DIMENSIONAL MOTION OBJECTIVES Slow and steady wins the race. Aesop s fable: The Hare and the Tortoise To learn how to use a motion detector and gain more familiarity
Name Date Partners L02-1 LAB 2 - ONE DIMENSIONAL MOTION OBJECTIVES Slow and steady wins the race. Aesop s fable: The Hare and the Tortoise To learn how to use a motion detector and gain more familiarity
Lecture Notes in Computer Science
 Lecture Notes in Computer Science Edited by G. Goos and J. Hartmanis 413 Reiner Lenz Group Theoretical Methods in Image Processing II III II II II Springer-Verlag Berlin Heidelberg NewYork London Paris
Lecture Notes in Computer Science Edited by G. Goos and J. Hartmanis 413 Reiner Lenz Group Theoretical Methods in Image Processing II III II II II Springer-Verlag Berlin Heidelberg NewYork London Paris
Experiment #2 Lab Electrostatics Pre-lab Questions
 Experiment #2 Lab Electrostatics Pre-lab Questions ** Disclaimer: This pre-lab is not to be copied, in whole or in part, unless a proper reference is made as to the source. (It is strongly recommended
Experiment #2 Lab Electrostatics Pre-lab Questions ** Disclaimer: This pre-lab is not to be copied, in whole or in part, unless a proper reference is made as to the source. (It is strongly recommended
Midterm: CS 6375 Spring 2015 Solutions
 Midterm: CS 6375 Spring 2015 Solutions The exam is closed book. You are allowed a one-page cheat sheet. Answer the questions in the spaces provided on the question sheets. If you run out of room for an
Midterm: CS 6375 Spring 2015 Solutions The exam is closed book. You are allowed a one-page cheat sheet. Answer the questions in the spaces provided on the question sheets. If you run out of room for an
Fundamentals of Circuits I: Current Models, Batteries & Bulbs
 Name: Lab Partners: Date: Pre-Lab Assignment: Fundamentals of Circuits I: Current Models, Batteries & Bulbs (Due at the beginning of lab) 1. Explain why in Activity 1.1 the plates will be charged in several
Name: Lab Partners: Date: Pre-Lab Assignment: Fundamentals of Circuits I: Current Models, Batteries & Bulbs (Due at the beginning of lab) 1. Explain why in Activity 1.1 the plates will be charged in several
Voltage, Current, Resistance, and Ohm's Law
 Voltage, Current, Resistance, and Ohm's Law a learn.sparkfun.com tutorial Available online at: http://sfe.io/t27 Contents Electricity Basics Electrical Charge Voltage Current Resistance Ohm's Law An Ohm's
Voltage, Current, Resistance, and Ohm's Law a learn.sparkfun.com tutorial Available online at: http://sfe.io/t27 Contents Electricity Basics Electrical Charge Voltage Current Resistance Ohm's Law An Ohm's
On The Center for Superconductivity Research The Scanning Near-Field Microwave Microscope
 On The Center for Superconductivity Research The Scanning Near-Field Microwave Microscope by Steven Anlage Associate Professor, UM Physics It all started in the spring of 1994, when an undergraduate Physics
On The Center for Superconductivity Research The Scanning Near-Field Microwave Microscope by Steven Anlage Associate Professor, UM Physics It all started in the spring of 1994, when an undergraduate Physics
CS 125 Section #12 (More) Probability and Randomized Algorithms 11/24/14. For random numbers X which only take on nonnegative integer values, E(X) =
 Probability and Randomized Algorithms 11/24/14. For random numbers X which only take on nonnegative integer values, E(X) =") CS 125 Section #12 (More) Probability and Randomized Algorithms 11/24/14 1 Probability First, recall a couple useful facts from last time about probability: Linearity of expectation: E(aX + by ) = ae(x)
CS 125 Section #12 (More) Probability and Randomized Algorithms 11/24/14 1 Probability First, recall a couple useful facts from last time about probability: Linearity of expectation: E(aX + by ) = ae(x)
Linear Independence Reading: Lay 1.7
 Linear Independence Reading: Lay 17 September 11, 213 In this section, we discuss the concept of linear dependence and independence I am going to introduce the definitions and then work some examples and
Linear Independence Reading: Lay 17 September 11, 213 In this section, we discuss the concept of linear dependence and independence I am going to introduce the definitions and then work some examples and
POWER DISTRIBUTION SYSTEM Calculating PDS Impedance Douglas Brooks Ultracad Design, Inc
 POWER DISTRIBUTION SYSTEM Calculating PDS Impedance Douglas Brooks Ultracad Design, Inc On a PCB (Printed Circuit Board) the Power Distribution System (PDS) is the system that distributes power from the
POWER DISTRIBUTION SYSTEM Calculating PDS Impedance Douglas Brooks Ultracad Design, Inc On a PCB (Printed Circuit Board) the Power Distribution System (PDS) is the system that distributes power from the
Use mathematical induction in Exercises 3 17 to prove summation formulae. Be sure to identify where you use the inductive hypothesis.
 Exercises Exercises 1. There are infinitely many stations on a train route. Suppose that the train stops at the first station and suppose that if the train stops at a station, then it stops at the next
Exercises Exercises 1. There are infinitely many stations on a train route. Suppose that the train stops at the first station and suppose that if the train stops at a station, then it stops at the next
ARTIFICIAL INTELLIGENCE. Artificial Neural Networks
 INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Artificial Neural Networks Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from www.cs.uu.nl/docs/vakken/b2ki/schema.html
INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Artificial Neural Networks Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from www.cs.uu.nl/docs/vakken/b2ki/schema.html
Calibration of the Modular Neutron Array (MoNA)
") Calibration of the Modular Neutron Array (MoNA) Robert Pepin Gonzaga University ~1~ Calibration of the Modular Neutron Array (MoNA): Figure 1 - A rendering of the Modular Neutron Array In recent years
Calibration of the Modular Neutron Array (MoNA) Robert Pepin Gonzaga University ~1~ Calibration of the Modular Neutron Array (MoNA): Figure 1 - A rendering of the Modular Neutron Array In recent years
Expected Value II. 1 The Expected Number of Events that Happen
 6.042/18.062J Mathematics for Computer Science December 5, 2006 Tom Leighton and Ronitt Rubinfeld Lecture Notes Expected Value II 1 The Expected Number of Events that Happen Last week we concluded by showing
6.042/18.062J Mathematics for Computer Science December 5, 2006 Tom Leighton and Ronitt Rubinfeld Lecture Notes Expected Value II 1 The Expected Number of Events that Happen Last week we concluded by showing
Designing Information Devices and Systems I Spring 2018 Homework 13
 EECS 16A Designing Information Devices and Systems I Spring 2018 Homework 13 This homework is due April 30, 2018, at 23:59. Self-grades are due May 3, 2018, at 23:59. Submission Format Your homework submission
EECS 16A Designing Information Devices and Systems I Spring 2018 Homework 13 This homework is due April 30, 2018, at 23:59. Self-grades are due May 3, 2018, at 23:59. Submission Format Your homework submission
Distributive property and its connection to areas
 February 27, 2009 Distributive property and its connection to areas page 1 Distributive property and its connection to areas Recap: distributive property The distributive property says that when you multiply
February 27, 2009 Distributive property and its connection to areas page 1 Distributive property and its connection to areas Recap: distributive property The distributive property says that when you multiply
Measuring Motion. Day 1
 Measuring Motion Day 1 Objectives I will identify the relationship between motion and a reference point I will identify the two factors that speed depends on I will determine the difference between speed
Measuring Motion Day 1 Objectives I will identify the relationship between motion and a reference point I will identify the two factors that speed depends on I will determine the difference between speed
CS5112: Algorithms and Data Structures for Applications
 CS5112: Algorithms and Data Structures for Applications Lecture 14: Exponential decay; convolution Ramin Zabih Some content from: Piotr Indyk; Wikipedia/Google image search; J. Leskovec, A. Rajaraman,
CS5112: Algorithms and Data Structures for Applications Lecture 14: Exponential decay; convolution Ramin Zabih Some content from: Piotr Indyk; Wikipedia/Google image search; J. Leskovec, A. Rajaraman,
Analog Computing: a different way to think about building a (quantum) computer
 computer") Analog Computing: a different way to think about building a (quantum) computer November 24, 2016 1 What is an analog computer? Most of the computers we have around us today, such as desktops, laptops,
Analog Computing: a different way to think about building a (quantum) computer November 24, 2016 1 What is an analog computer? Most of the computers we have around us today, such as desktops, laptops,
The result is; distances are contracted in the direction of motion.
 The result is; distances are contracted in the direction of motion. t = t/(1 v 2 /c 2 ) 0.5 d = d(1- v 2 /c 2 ) 0.5 These are the Lorentz equations. The Twin-Paradox. A woman astronaut is going to fly
The result is; distances are contracted in the direction of motion. t = t/(1 v 2 /c 2 ) 0.5 d = d(1- v 2 /c 2 ) 0.5 These are the Lorentz equations. The Twin-Paradox. A woman astronaut is going to fly
Section 2.1. Increasing, Decreasing, and Piecewise Functions; Applications
 Section 2.1 Increasing, Decreasing, and Piecewise Functions; Applications Features of Graphs Intervals of Increase and Decrease A function is increasing when the graph goes up as you travel along it from
Section 2.1 Increasing, Decreasing, and Piecewise Functions; Applications Features of Graphs Intervals of Increase and Decrease A function is increasing when the graph goes up as you travel along it from
Visual Anomaly Detection from Small Samples for Mobile Robots. *The University of Tokyo, Japan Graduate School of Information Science and Technology
 Visual Anomaly Detection from Small Samples for Mobile Robots Hiroharu Kato*, Tatsuya Harada *,**, Yasuo Kuniyoshi* *The University of Tokyo, Japan Graduate School of Information Science and Technology
Visual Anomaly Detection from Small Samples for Mobile Robots Hiroharu Kato*, Tatsuya Harada *,**, Yasuo Kuniyoshi* *The University of Tokyo, Japan Graduate School of Information Science and Technology
Lecture 14, Thurs March 2: Nonlocal Games
 Lecture 14, Thurs March 2: Nonlocal Games Last time we talked about the CHSH Game, and how no classical strategy lets Alice and Bob win it more than 75% of the time. Today we ll see how, by using entanglement,
Lecture 14, Thurs March 2: Nonlocal Games Last time we talked about the CHSH Game, and how no classical strategy lets Alice and Bob win it more than 75% of the time. Today we ll see how, by using entanglement,
Gravitational Energy using Gizmos
 Name: Date: Gravitational Energy using Gizmos Using your Gizmo app, open the Potential energy on shelves Gizmo Vocabulary: gravitational energy, Prior Knowledge Questions (Do these BEFORE using the Gizmo.)
Name: Date: Gravitational Energy using Gizmos Using your Gizmo app, open the Potential energy on shelves Gizmo Vocabulary: gravitational energy, Prior Knowledge Questions (Do these BEFORE using the Gizmo.)
Day 2 and 3 Graphing Linear Inequalities in Two Variables.notebook. Formative Quiz. 1) Sketch the graph of the following linear equation.
 Sketch the graph of the following linear equation.") Formative Quiz 1) Sketch the graph of the following linear equation. (a) 1 (b) 2 2. Solve for x in the given triangle. 12 53 0 x 47 0 3 3. Solve for x in the given triangle. 87 0 13 9 x 4 5 Graphing Linear
Formative Quiz 1) Sketch the graph of the following linear equation. (a) 1 (b) 2 2. Solve for x in the given triangle. 12 53 0 x 47 0 3 3. Solve for x in the given triangle. 87 0 13 9 x 4 5 Graphing Linear
Activity 4. Life (and Death) before Seat Belts. What Do You Think? For You To Do GOALS
 before Seat Belts. What Do You Think? For You To Do GOALS") Activity 4 Life (and Death) before Seat Belts Activity 4 Life (and Death) before Seat Belts GOALS In this activity you will: Understand Newton s First Law of Motion. Understand the role of safety belts.
Activity 4 Life (and Death) before Seat Belts Activity 4 Life (and Death) before Seat Belts GOALS In this activity you will: Understand Newton s First Law of Motion. Understand the role of safety belts.
M E 345 Professor John M. Cimbala Lecture 42
 M E 345 Professor John M. Cimbala Lecture 42 Today is the last day of class. We will Do some review example problems to help you prepare for the final exam Comments: Today, I will cover as many review
M E 345 Professor John M. Cimbala Lecture 42 Today is the last day of class. We will Do some review example problems to help you prepare for the final exam Comments: Today, I will cover as many review
Final Exam, Fall 2002
 15-781 Final Exam, Fall 22 1. Write your name and your andrew email address below. Name: Andrew ID: 2. There should be 17 pages in this exam (excluding this cover sheet). 3. If you need more room to work
15-781 Final Exam, Fall 22 1. Write your name and your andrew email address below. Name: Andrew ID: 2. There should be 17 pages in this exam (excluding this cover sheet). 3. If you need more room to work
Introduction To Artificial Neural Networks
 Introduction To Artificial Neural Networks Machine Learning Supervised circle square circle square Unsupervised group these into two categories Supervised Machine Learning Supervised Machine Learning Supervised
Introduction To Artificial Neural Networks Machine Learning Supervised circle square circle square Unsupervised group these into two categories Supervised Machine Learning Supervised Machine Learning Supervised
Reference number: Worksheet/Receipt. Owners name: - Telephone: Description of item(s) received, including accessories:
 received, including accessories:") Worksheet/Receipt Owners name: - Address: n/a Telephone: n/a Description of item(s) received, including accessories: Jaguar E-Type Smiths car clock marked CE 1114/00 (negative earth). Work required based
Worksheet/Receipt Owners name: - Address: n/a Telephone: n/a Description of item(s) received, including accessories: Jaguar E-Type Smiths car clock marked CE 1114/00 (negative earth). Work required based
MATH 223 REVIEW PROBLEMS
 * * * MATH 223 REVIEW PROBLEMS 1 1. You are in a nicely heated cabin in the winter. Deciding that it s too warm you open a small window. Let be the temperature in the room minutes after the window was
* * * MATH 223 REVIEW PROBLEMS 1 1. You are in a nicely heated cabin in the winter. Deciding that it s too warm you open a small window. Let be the temperature in the room minutes after the window was
A Gentle Introduction to Reinforcement Learning
 A Gentle Introduction to Reinforcement Learning Alexander Jung 2018 1 Introduction and Motivation Consider the cleaning robot Rumba which has to clean the office room B329. In order to keep things simple,
A Gentle Introduction to Reinforcement Learning Alexander Jung 2018 1 Introduction and Motivation Consider the cleaning robot Rumba which has to clean the office room B329. In order to keep things simple,
Verification of Pharmaceutical Raw Materials Using the Spectrum Two N FT-NIR Spectrometer
 APPLICATION NOTE FT-NIR Spectroscopy Authors: Ian Robertson Jerry Sellors PerkinElmer, Inc. Seer Green, UK Verification of Pharmaceutical Raw Materials Using the Spectrum Two N FT-NIR Spectrometer Introduction
APPLICATION NOTE FT-NIR Spectroscopy Authors: Ian Robertson Jerry Sellors PerkinElmer, Inc. Seer Green, UK Verification of Pharmaceutical Raw Materials Using the Spectrum Two N FT-NIR Spectrometer Introduction
the time it takes until a radioactive substance undergoes a decay
 1 Probabilities 1.1 Experiments with randomness Wewillusethetermexperimentinaverygeneralwaytorefertosomeprocess that produces a random outcome. Examples: (Ask class for some first) Here are some discrete
1 Probabilities 1.1 Experiments with randomness Wewillusethetermexperimentinaverygeneralwaytorefertosomeprocess that produces a random outcome. Examples: (Ask class for some first) Here are some discrete
Review (11.1) 1. A sequence is an infinite list of numbers {a n } n=1 = a 1, a 2, a 3, The sequence is said to converge if lim
 1. A sequence is an infinite list of numbers {a n } n=1 = a 1, a 2, a 3, The sequence is said to converge if lim") Announcements: Note that we have taking the sections of Chapter, out of order, doing section. first, and then the rest. Section. is motivation for the rest of the chapter. Do the homework questions from
Announcements: Note that we have taking the sections of Chapter, out of order, doing section. first, and then the rest. Section. is motivation for the rest of the chapter. Do the homework questions from
Exercises. Template for Proofs by Mathematical Induction
 5. Mathematical Induction 329 Template for Proofs by Mathematical Induction. Express the statement that is to be proved in the form for all n b, P (n) forafixed integer b. 2. Write out the words Basis
5. Mathematical Induction 329 Template for Proofs by Mathematical Induction. Express the statement that is to be proved in the form for all n b, P (n) forafixed integer b. 2. Write out the words Basis
PHY 221 Lab 7 Work and Energy
 PHY 221 Lab 7 Work and Energy Name: Partners: Goals: Before coming to lab, please read this packet and do the prelab on page 13 of this handout. Note: originally, Lab 7 was momentum and collisions. The
PHY 221 Lab 7 Work and Energy Name: Partners: Goals: Before coming to lab, please read this packet and do the prelab on page 13 of this handout. Note: originally, Lab 7 was momentum and collisions. The