In The Beginning and Cosmology Becomes a Science
|
|
|
- Veronica Wright
- 5 years ago
- Views:
Transcription

1 In The Beginning and Cosmology Becomes a Science
2 Naked-eye (unaided-eye) astronomy had an important place in ancient civilizations Positional astronomy the study of the positions of objects in the sky and how these positions change importance in navigation Naked-eye (unaided-eye) astronomy the sort that requires no equipment but human vision Extends far back in time, across all cultures British Isles Stonehenge Native American Medicine Wheel Aztec, Mayan and Incan temples Egyptian pyramids
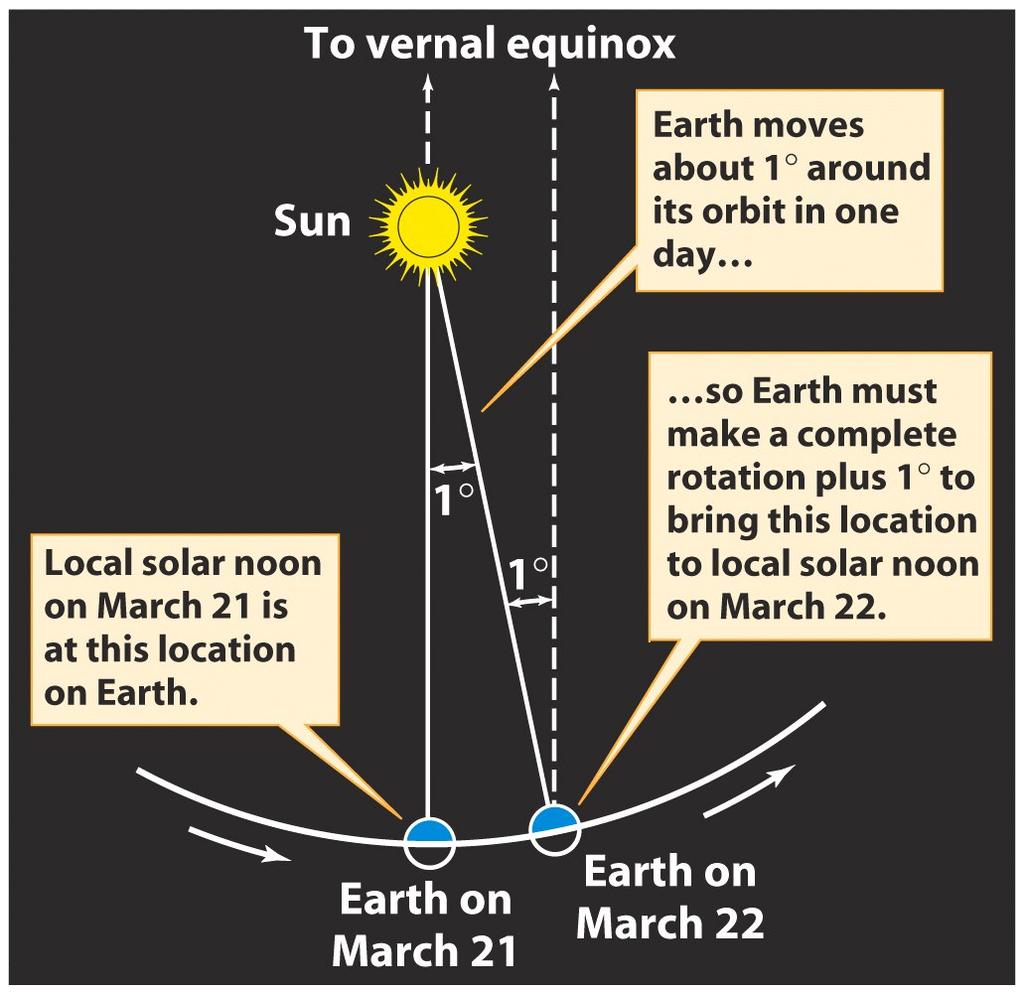
3 Astronomical observations led to the development of the modern calendar The day based on the Earth s rotation The year based on the Earth s orbit The month based on the lunar cycle None of these are exactly the same as nature so astronomers use the average or mean day and leap years to keep the calendar and time consistent
 of the")
4 Astronomers use angles to denote the positions and apparent sizes of objects in the sky The basic unit of angular measure is the degree ( ). Astronomers use angular measure to describe the apparent size of a celestial object what fraction of the sky that object seems to cover The angular diameter (or angular size) of the Moon is ½ or the Moon subtends an angle of ½.

5 If you draw lines from your eye to each of two stars, the angle between these lines is the angular distance between these two stars

6 The adult human hand held at arm s length provides a means of estimating angles
7 Angular Measurements Subdivide one degree into 60 arcminutes minutes of arc abbreviated as 60 arcmin or 60 Subdivide one arcminute into 60 arcseconds seconds of arc abbreviated as 60 arcsec or 60 1 = 60 arcmin = 60 1 = 60 arcsec = 60

8 Powers-of-ten notation a useful shorthand system for writing numbers
9 Common Prefixes for Powers of Ten Factor Name Symbol (billion) 10 9 Giga- G (million) 10 6 Mega- M (thousand) 10 3 kilo- k (hundredth) 10-2 centi- c (thousandth) 10-3 milli- m (millionth) 10-6 micro- μ (billionth) 10-9 nano- n
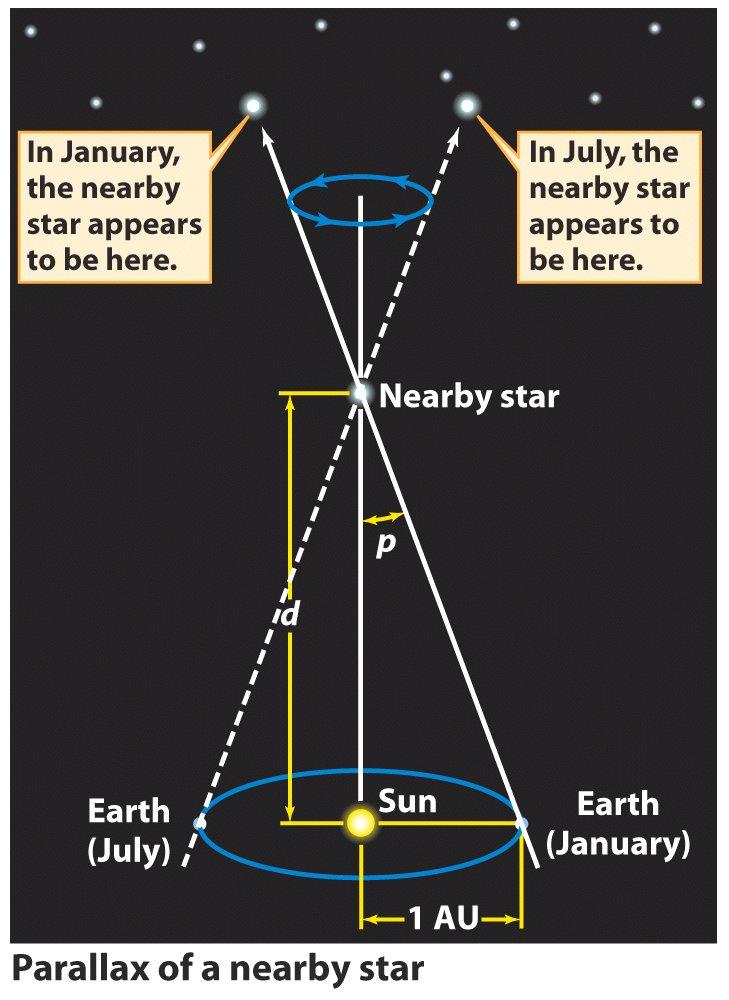
10 Astronomical distances are often measured in astronomical units, parsecs, or light-years Astronomical Unit (AU) One AU is the average distance between Earth and the Sun X 10 8 km or million miles Light Year (ly) One ly is the distance light can travel in one year at a speed of about 3 x 10 5 km/s or 186,000 miles/s 9.46 X km or 63,240 AU Parsec (pc) the distance at which 1 AU subtends an angle of 1 arcsec or the distance from which Earth would appear to be one arcsecond from the Sun 1 pc = km = 3.26 ly
11
12
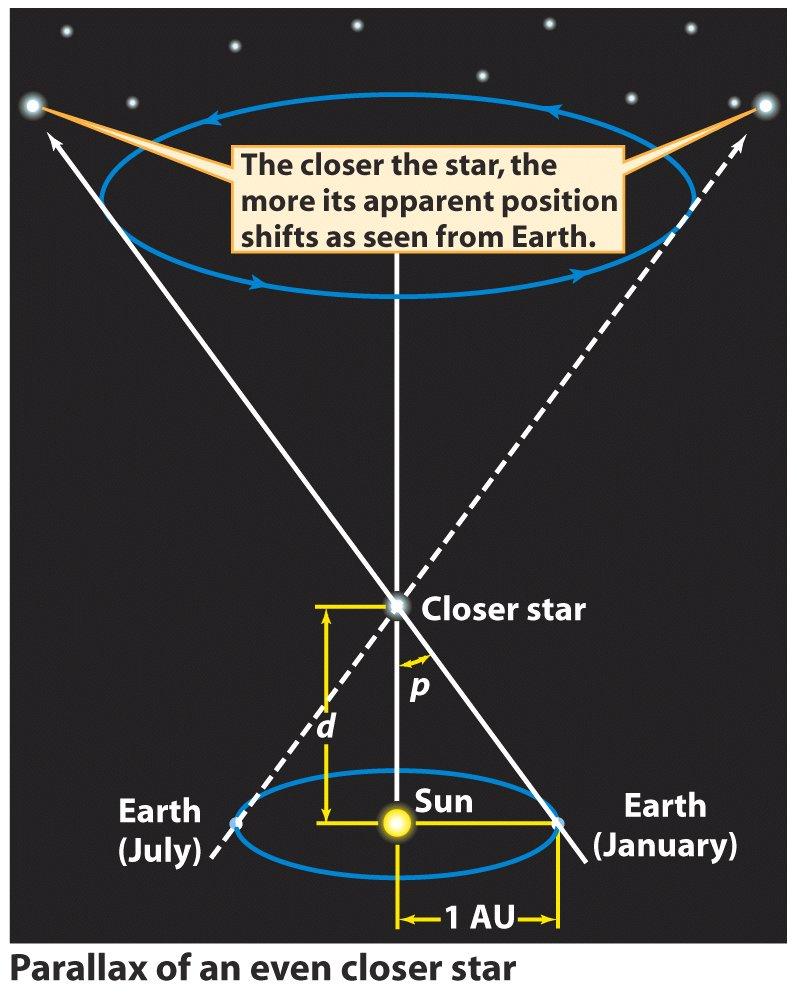
13 The parallax of stars reveals their distances Distances to the nearer stars can be determined by parallax, the apparent shift of a star against the background stars observed as the Earth moves along its orbit Parallax measurements made from orbit, above the blurring effects of the atmosphere, are much more accurate than those made with Earth-based telescopes Stellar parallaxes can only be measured for stars within a few hundred parsecs

14 Barnard s star has a parallax of 0.54 arcsec
15
16 The Small Angle Formula D = linear size of object α d a = angular size of object (in arcsec) d = distance to the object D =
17 Small Angle Formula Example On July 26, 2003, Jupiter was 943 million kilometers from Earth and had an angular diameter of Using the small-angle formula, determine Jupiter s actual diameter. D = 31.2" km = km
18 iclicker Question The Sun and full Moon have about the same angular size on the sky of 0.5 degrees. Why? A. the sun and moon are the same size and the same distance from Earth, but always in different parts of the sky. B. the moon is bigger than the sun and farther from Earth C. all spherical objects have the same angular size on the sky D. the moon is smaller than the sun, but closer to Earth E. none of the above

")
19 Eighty-eight constellations officially cover the entire sky Ancient peoples looked at the stars and imagined groupings Pictures in the sky Different cultures different pictures We still refer to many of these groupings Astronomers call them constellations (from the Latin for group of stars ) Parts are asterisms

20 Modern Constellations On modern star charts, the entire sky is divided into 88 regions Each is a constellation Most stars in a constellation are nowhere near one another They only appear to be close together because they are in nearly the same direction as seen from Earth Need to think in three dimensions

21 The appearance of the sky changes during the course of the night and from one night to the next Stars appear to rise in the east, slowly rotate about the Earth and set in the west. This diurnal or daily motion of the stars is actually caused by the 24-hour rotation of the Earth.

22 Annual Motion The stars also appear to slowly shift in position throughout the year This is due to the orbit of the earth around the sun If you follow a particular star on successive evenings, you will find that it rises approximately 4 minutes earlier each night, or 2 hours earlier each month

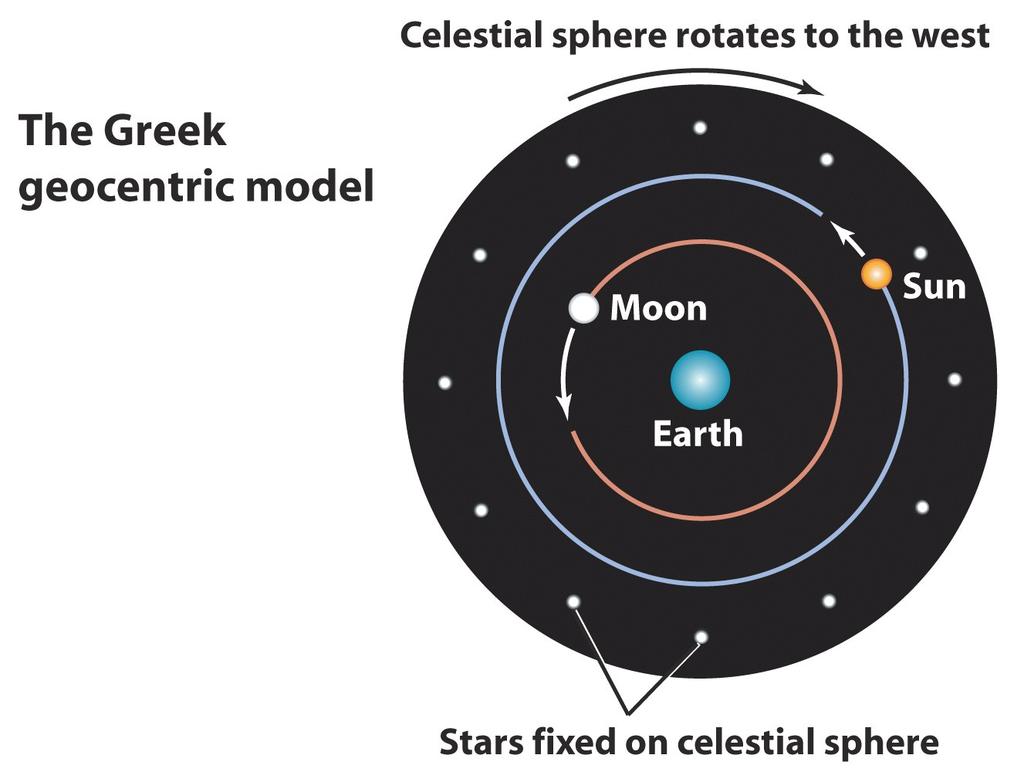
23 It was common to imagine that the stars are located on a celestial sphere The celestial sphere is an imaginary object that has no basis in physical reality However it is still a model that remains a useful tool of positional astronomy Landmarks on the celestial sphere are projections of those on the Earth

24 Celestial equator divides the sky into northern and southern hemispheres Celestial poles are where the Earth s axis of rotation would intersect the celestial sphere Polaris is less than 1 away from the north celestial pole, which is why it is called the North Star or the Pole Star. Point in the sky directly overhead an observer anywhere on Earth is called that observer s zenith. Nadir is directly opposite the zenith

25 The Reason for the Seasons
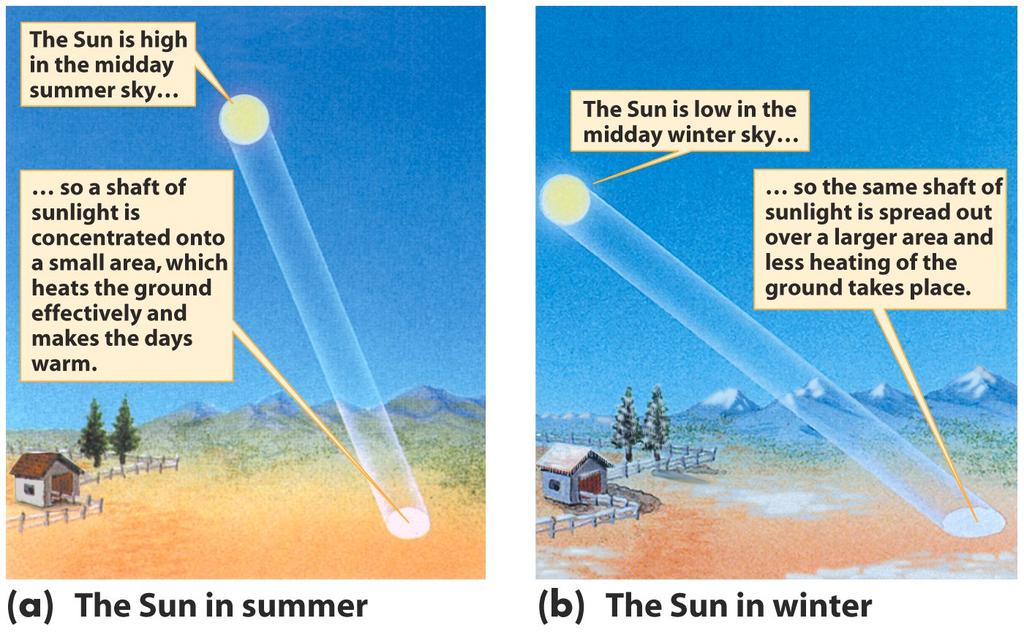
26 The seasons are caused by the tilt of Earth s axis of rotation The Earth s axis of rotation is not perpendicular to the plane of the Earth s orbit It is tilted about 23½ away from the perpendicular The Earth maintains this tilt as it orbits the Sun, with the Earth s north pole pointing toward the north celestial pole
27

28 Sept 21 Dec 21 June 21 March 21 The Sun appears to trace out a circular path called the ecliptic on the celestial sphere tilted at 23 ½ degrees to the equator The ecliptic and the celestial equator intersect at only two points Each point is called an equinox The point on the ecliptic farthest north of the celestial equator that marks the location of the Sun at the beginning of summer in the northern hemisphere is called the summer solstice At the beginning of the northern hemisphere s winter the Sun is farthest south of the celestial equator at a point called the winter solstice

29 The Moon helps to cause precession, a slow, conical motion of Earth s axis of rotation

30 Precession causes the gradual change of the star that marks the North Celestial Pole
31


32 The Moon s rotation always keeps the same face toward the Earth this is synchronous rotation

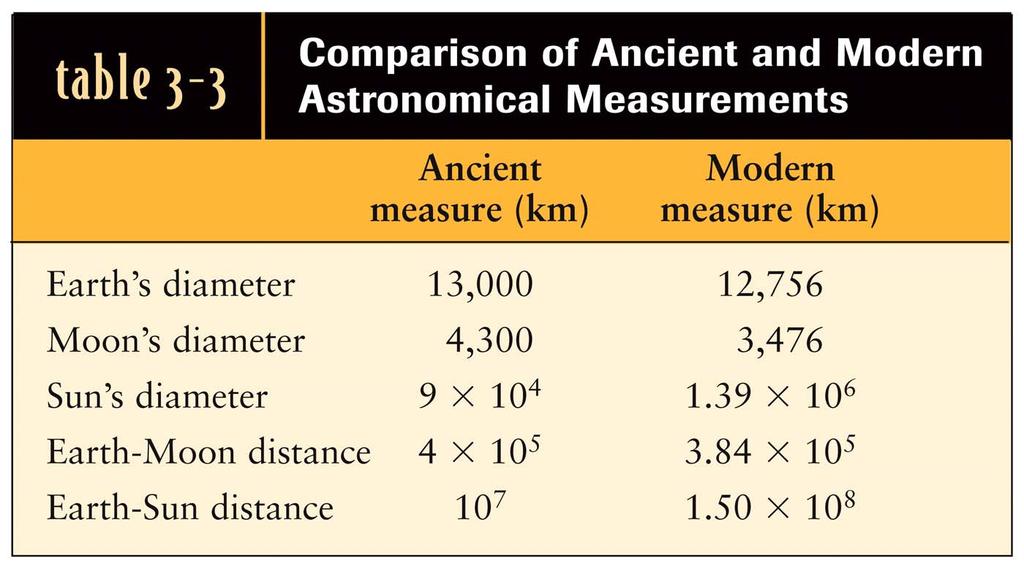
33 Ancient astronomers measured the size of the Earth and attempted to determine distances to the Sun and Moon Observations In the town of Syene, the Sun shone directly down a vertical shafts on the summer solstice In Alexandria, the position of the sun changed by 7 or about one-fiftieth of a complete circle Conclusion Around 200 B.C., the Greek astronomer Eratosthenes used 50 x the distance between Alexandria and Syene to get a circumference of the earth of about km (the actual is about kilometers)

34 Aristarchus knew that the Sun, Moon, and Earth form a right triangle at first and third quarter phases Using geometrical arguments, he calculated the relative lengths of the sides of these triangles, thereby obtaining the relative distances to the Sun and Moon
35
36 To understand the universe, astronomers use the laws of physics to construct testable theories and models Scientific Method A reiterative process based on observations, logic, and skepticism Hypothesis A concept or idea that seems to explain a phenomenon or set of observations Model A set of hypotheses that have withstood observational or experimental tests Theory A set of related hypotheses can be pieced together into a self consistent description of natural observations Laws of Physics Theories that accurately describe the workings of physical reality, and have stood the test of time and been shown to have great and general validity

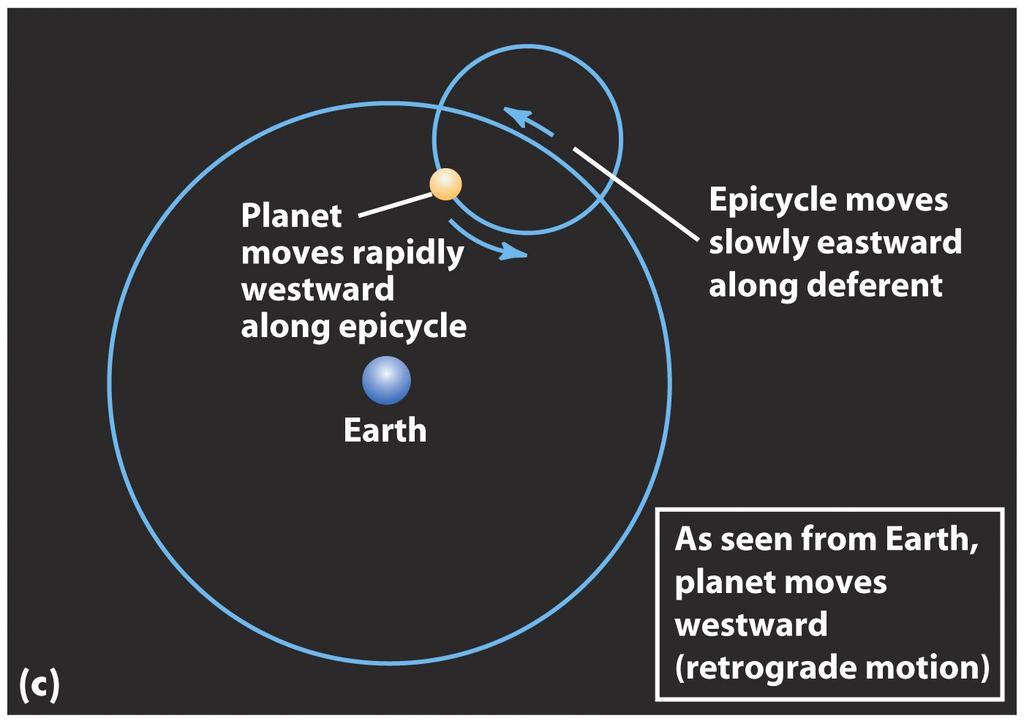
37 Ancient astronomers invented geocentric models to explain planetary motions Like the Sun and Moon, the planets move on the celestial sphere with respect to the background of stars Most of the time a planet moves eastward in direct motion, in the same direction as the Sun and the Moon, but from time to time it moves westward in retrograde motion

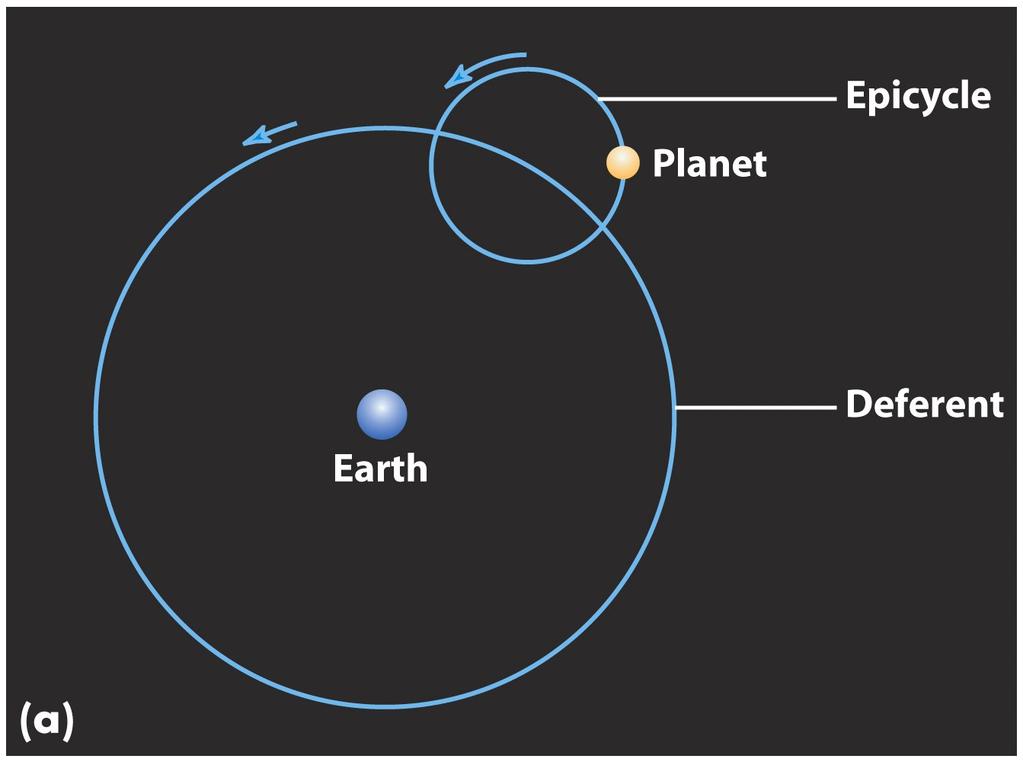
38 Ancient astronomers believed the Earth to be at the center of the universe They invented a complex system of epicycles and deferents to explain the direct and retrograde motions of the planets on the celestial sphere
39
40
41
42

43 Nicolaus Copernicus devised a comprehensive heliocentric model Copernicus s heliocentric (Sun-centered) theory simplified the general explanation of planetary motions In a heliocentric system, the Earth is one of the planets orbiting the Sun The sidereal period of a planet, its true orbital period, is measured with respect to the stars

44 Tycho Brahe s astronomical observations provided evidence for another model of the solar system

45 Parallax apparent difference in position of object viewed from two different locations

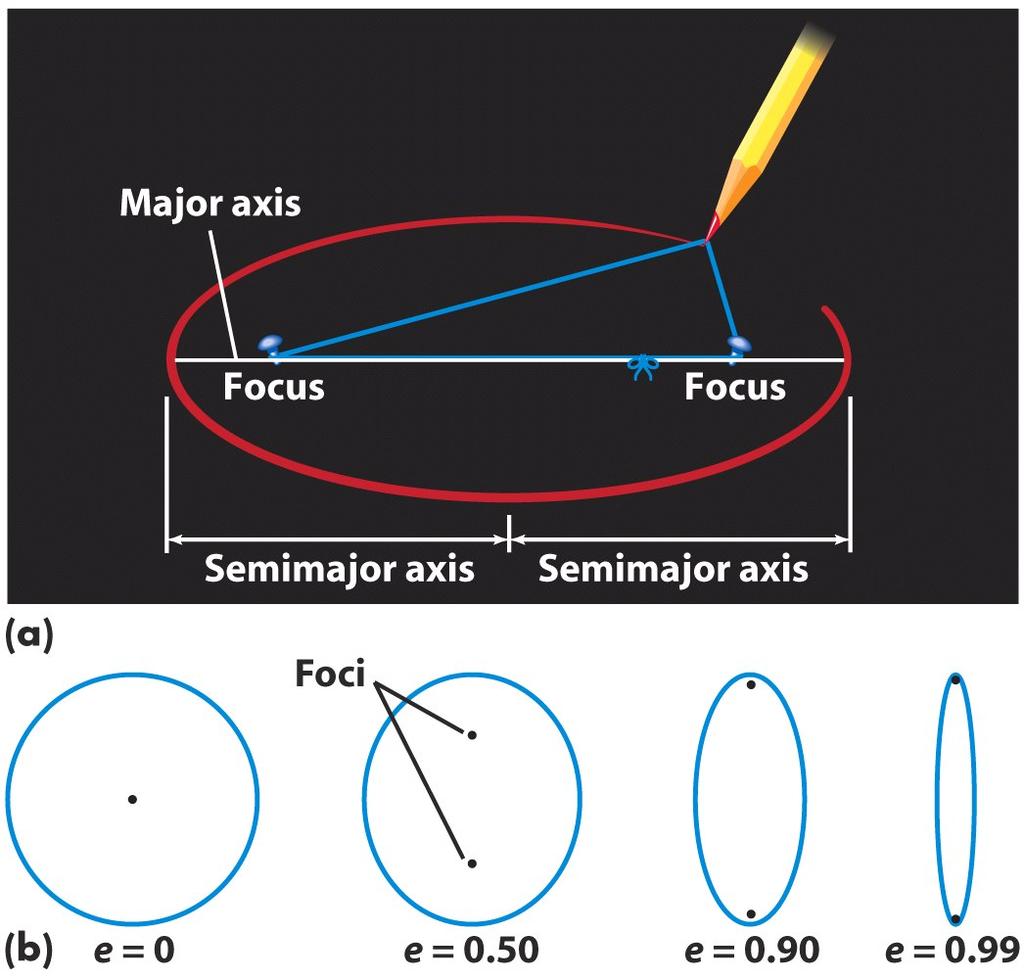
46 Johannes Kepler proposed elliptical paths for the planets about the Sun Using data collected by Tycho Brahe, Kepler deduced three laws of planetary motion: the orbits are ellipses With Sun at one focus Equal areas in equal times a planet s speed varies as it moves around its elliptical orbit The period squared equals the semi-major axis cubed the orbital period of a planet is related to the size of its orbit

47 Kepler s First Law
48
49 Kepler s Second Law

50 Kepler s Third Law P 2 = a 3 P = planet s sidereal period, in years a = planet s semimajor axis, in AU
51 iclicker Question Kepler discovered his laws of planetary motion primarily from a study of the observations of A Copernicus B Galileo Galilei C Ptolemy D Tycho Brahe E Melvin Laird

52 Galileo s discoveries with a telescope strongly supported a heliocentric model Galileo s observations reported in 1610 the phases of Venus* the motions of the moons of Jupiter* mountains on the Moon Sunspots on the Sun *observations supporting heliocentric model
53 One of Galileo s most important discoveries with the telescope was that Venus exhibits phases like those of the Moon Galileo also noticed that the apparent size of Venus as seen through his telescope was related to the planet s phase Venus appears small at gibbous phase and largest at crescent phase

54 There is a correlation between the phases of Venus and the planet s angular distance from the Sun

55 Geocentric Model Issues To explain why Venus is never seen very far from the Sun, the Ptolemaic model had to assume that the deferents of Venus and of the Sun move together in lockstep, with the epicycle of Venus centered on a straight line between the Earth and the Sun In this model, Venus was never on the opposite side of the Sun from the Earth, and so it could never have shown the gibbous phases that Galileo observed
56 In 1610 Galileo discovered four moons of Jupiter, also called the Galilean moons or satellites This is a page from his published work in 1610

57 Isaac Newton formulated three laws that describe fundamental properties of physical reality Called Newton s Laws of Motion, they apply to the motions of objects on Earth as well as in space a body remains at rest, or moves in a straight line at a constant speed, unless acted upon by an outside force the law of inertia the force on an object is directly proportional to its mass and acceleration F = m x a the principle of action and reaction whenever one body exerts a force on a second body, the second body exerts an equal and opposite force on the first body
58 Newton s Law of Universal Gravitation F = gravitational force between two objects m 1 = mass of first object m 2 = mass of second object r = distance between objects G = universal constant of gravitation If the masses are measured in kilograms and the distance between them in meters, then the force is measured in Newtons Laboratory experiments have yielded a value for G of G = Newton m 2 /kg 2


59 Newton s description of gravity accounts for Kepler s laws and explains the motions of the planets and other orbiting bodies

60 Orbital Motion The law of universal gravitation accounts for planets not falling into the Sun nor the Moon crashing into the Earth Paths A, B, and C do not have enough horizontal velocity to escape Earth s surface whereas Paths D, E, and F do. Path E is where the horizontal velocity is exactly what is needed so its orbit matches the circular curve of the Earth
61 Orbits follow any one of the family of curves called conic sections

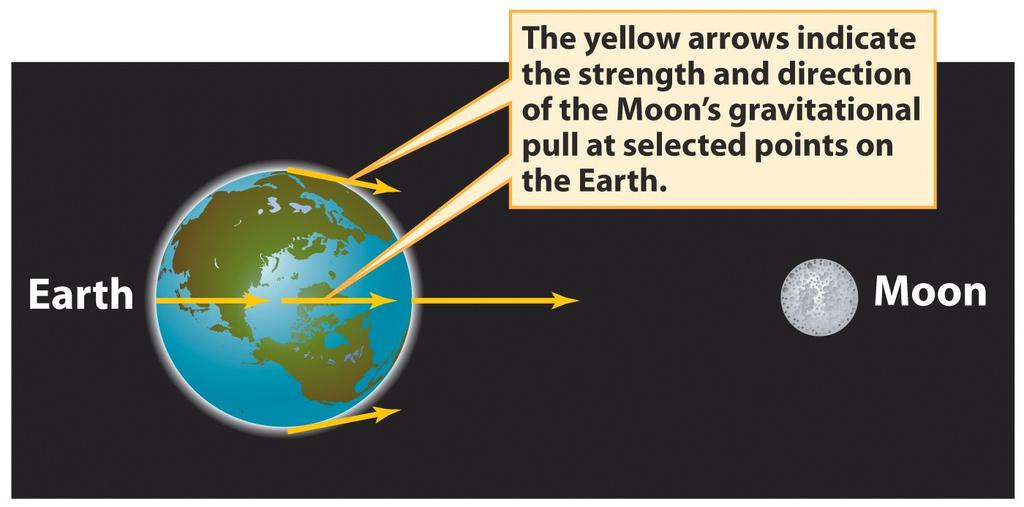
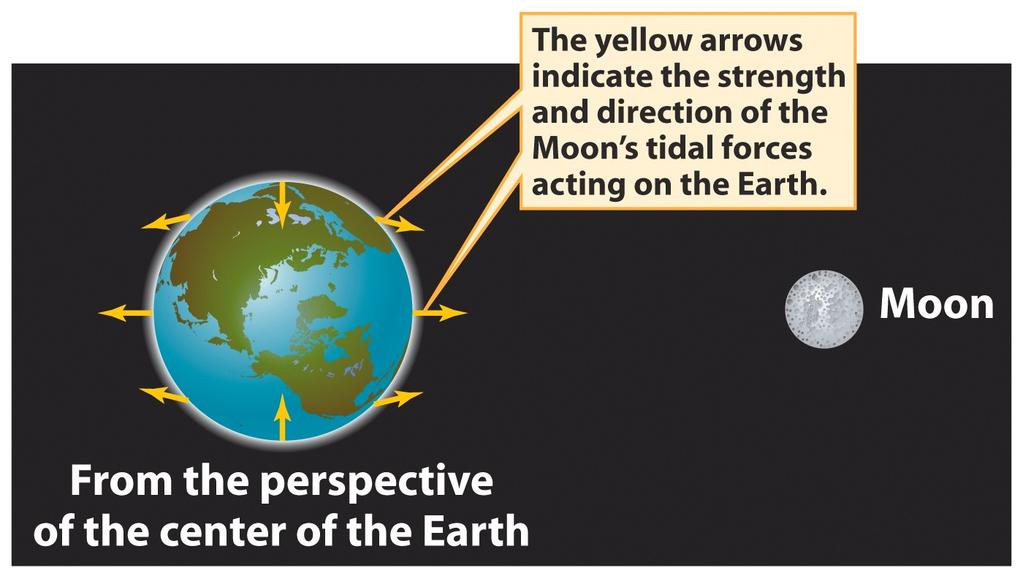
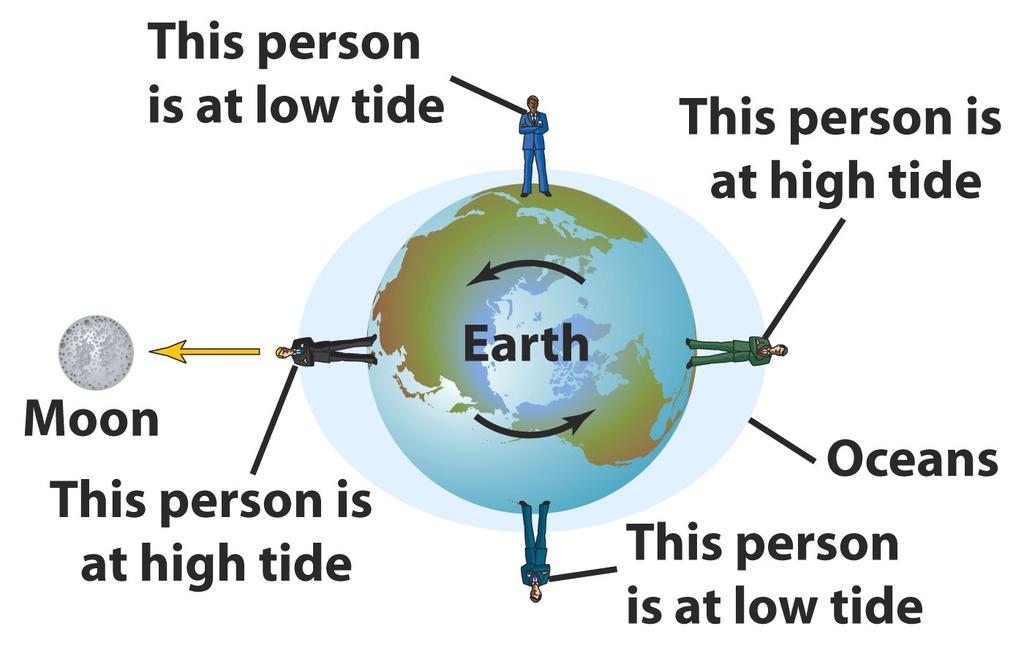
62 Gravitational forces between two objects produce tides in distant regions of the universe
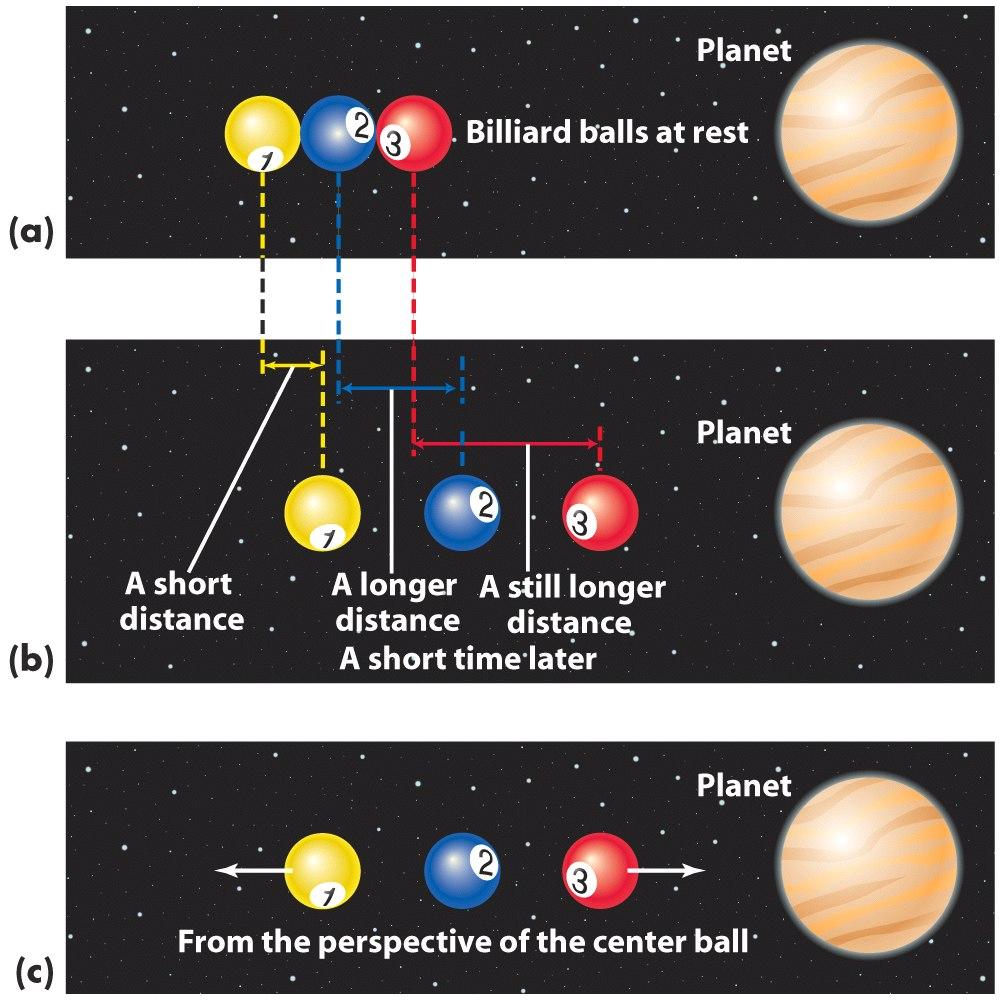
63 Understanding Tidal Forces
64
65
66

67
68
69
70 iclicker Question If the Earth's axis were not tilted with respect to its orbital plane, then A a mean solar day would be longer B a sidereal day would be longer C the tides would be much stronger D there would be virtually no seasons E the period of revolution and rotation would be equal
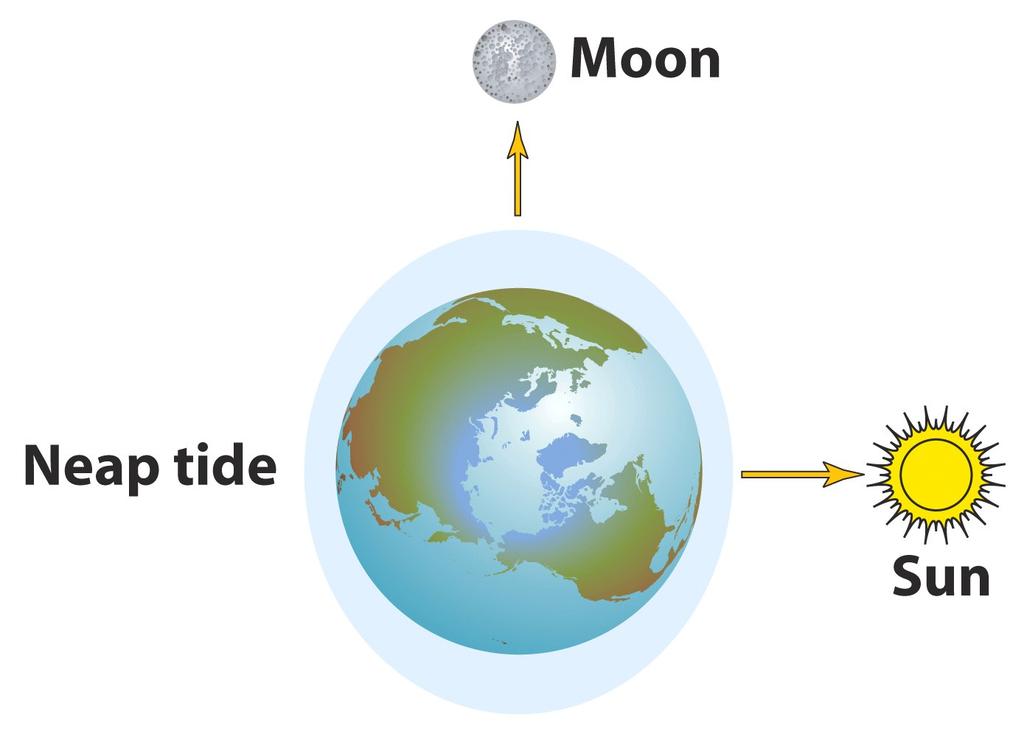
71 acceleration aphelion conic section conjunction deferent direct motion eccentricity ellipse elongation epicycle focus force geocentric model gravitational force gravity greatest eastern and western elongation heliocentric model hyperbola inferior conjunction inferior planet Kepler s laws law of equal areas law of inertia law of universal gravitation Key Words major axis mass Neap and spring tides Newtonian mechanics Newton s laws of motion Newton s form of Kepler s third law Occam s razor opposition parabola parallax perihelion period (of a planet) Ptolemaic system retrograde motion semimajor axis sidereal period speed superior conjunction superior planet synodic period tidal forces universal constant of gravitation velocity weight
72 Vocabulary angle angular diameter (angular size) angular distance angular measure arcminute arcsecond astronomical unit (AU) Big Bang black hole degree ( ) exponent galaxy gamma-ray burster hypothesis kiloparsec (kpc) laws of physics light-year (ly) megaparsec (Mpc) model
73 Antarctic and Arctic Circles apparent solar day apparent solar time autumnal equinox celestial equator celestial sphere circumpolar constellation declination diurnal motion ecliptic epoch equinox lower meridian mean solar day mean sun meridian meridian transit nadir north celestial pole Vocabulary positional astronomy precession precession of the equinoxes right ascension sidereal clock sidereal day sidereal time sidereal year south celestial pole summer solstice time zone tropical year Tropic of Cancer Tropic of Capricorn upper meridian vernal equinox winter solstice zenith zodiac
74 Vocabulary annular eclipse apogee eclipse eclipse path eclipse year first quarter moon full moon line of nodes lunar eclipse lunar phases new moon partial lunar eclipse partial solar eclipse penumbra penumbral eclipse perigee plane of the ecliptic saros sidereal month solar corona solar eclipse synchronous rotation synodic month third quarter moon totality total lunar eclipse total solar eclipse umbra waning crescent moon waning gibbous moon waxing crescent moon waxing gibbous moon
In The Beginning and Cosmology Becomes a Science
 In The Beginning and Cosmology Becomes a Science Naked-eye (unaided-eye) astronomy had an important place in ancient civilizations Positional astronomy the study of the positions of objects in the sky
In The Beginning and Cosmology Becomes a Science Naked-eye (unaided-eye) astronomy had an important place in ancient civilizations Positional astronomy the study of the positions of objects in the sky
Guiding Questions. Discovering the Night Sky. iclicker Qustion
 Guiding Questions Discovering the Night Sky 1 1. What methods do scientists use to expand our understanding of the universe? 2. What makes up our solar system? 3. What are the stars? Do they last forever?
Guiding Questions Discovering the Night Sky 1 1. What methods do scientists use to expand our understanding of the universe? 2. What makes up our solar system? 3. What are the stars? Do they last forever?
Gravitation and the Motion of the Planets
 Gravitation and the Motion of the Planets 1 Guiding Questions 1. How did ancient astronomers explain the motions of the planets? 2. Why did Copernicus think that the Earth and the other planets go around
Gravitation and the Motion of the Planets 1 Guiding Questions 1. How did ancient astronomers explain the motions of the planets? 2. Why did Copernicus think that the Earth and the other planets go around
Gravitation and the Waltz of the Planets
 Gravitation and the Waltz of the Planets Chapter Four Guiding Questions 1. How did ancient astronomers explain the motions of the planets? 2. Why did Copernicus think that the Earth and the other planets
Gravitation and the Waltz of the Planets Chapter Four Guiding Questions 1. How did ancient astronomers explain the motions of the planets? 2. Why did Copernicus think that the Earth and the other planets
Gravitation and the Waltz of the Planets. Chapter Four
 Gravitation and the Waltz of the Planets Chapter Four Guiding Questions 1. How did ancient astronomers explain the motions of the planets? 2. Why did Copernicus think that the Earth and the other planets
Gravitation and the Waltz of the Planets Chapter Four Guiding Questions 1. How did ancient astronomers explain the motions of the planets? 2. Why did Copernicus think that the Earth and the other planets
Discovering the Night Sky
 Discovering the Night Sky Guiding Questions 1. What role did astronomy play in ancient civilizations? 2. Are the stars that make up a constellation actually close to one another? 3. Are the same stars
Discovering the Night Sky Guiding Questions 1. What role did astronomy play in ancient civilizations? 2. Are the stars that make up a constellation actually close to one another? 3. Are the same stars
Discovering the Night Sky
 Guiding Questions Discovering the Night Sky 1. What role did astronomy play in ancient civilizations? 2. Are the stars that make up a constellation actually close to one another? 3. Are the same stars
Guiding Questions Discovering the Night Sky 1. What role did astronomy play in ancient civilizations? 2. Are the stars that make up a constellation actually close to one another? 3. Are the same stars
Knowing the Heavens. Chapter Two. Guiding Questions. Naked-eye (unaided-eye) astronomy had an important place in ancient civilizations
 astronomy had an important place in ancient civilizations") Knowing the Heavens Chapter Two Guiding Questions 1. What role did astronomy play in ancient civilizations? 2. Are the stars that make up a constellation actually close to one another? 3. Are the same
Knowing the Heavens Chapter Two Guiding Questions 1. What role did astronomy play in ancient civilizations? 2. Are the stars that make up a constellation actually close to one another? 3. Are the same
Introduction To Modern Astronomy I
 ASTR 111 003 Fall 2006 Lecture 03 Sep. 18, 2006 Introduction To Modern Astronomy I Introducing Astronomy (chap. 1-6) Planets and Moons (chap. 7-17) Ch1: Astronomy and the Universe Ch2: Knowing the Heavens
ASTR 111 003 Fall 2006 Lecture 03 Sep. 18, 2006 Introduction To Modern Astronomy I Introducing Astronomy (chap. 1-6) Planets and Moons (chap. 7-17) Ch1: Astronomy and the Universe Ch2: Knowing the Heavens
3) During retrograde motion a planet appears to be A) dimmer than usual. B) the same brightness as usual C) brighter than usual.
 During retrograde motion a planet appears to be A) dimmer than usual. B) the same brightness as usual C) brighter than usual.") Descriptive Astronomy (ASTR 108) Exam 1 B February 17, 2010 Name: In each of the following multiple choice questions, select the best possible answer. In the line on the scan sheet corresponding to the
Descriptive Astronomy (ASTR 108) Exam 1 B February 17, 2010 Name: In each of the following multiple choice questions, select the best possible answer. In the line on the scan sheet corresponding to the
1) Kepler's third law allows us to find the average distance to a planet from observing its period of rotation on its axis.
 Kepler's third law allows us to find the average distance to a planet from observing its period of rotation on its axis.") Descriptive Astronomy (ASTR 108) Exam 1 A February 17, 2010 Name: In each of the following multiple choice questions, select the best possible answer. In the line on the scan sheet corresponding to the
Descriptive Astronomy (ASTR 108) Exam 1 A February 17, 2010 Name: In each of the following multiple choice questions, select the best possible answer. In the line on the scan sheet corresponding to the
PHYS 160 Astronomy Test #1 Fall 2017 Version B
 PHYS 160 Astronomy Test #1 Fall 2017 Version B 1 I. True/False (1 point each) Circle the T if the statement is true, or F if the statement is false on your answer sheet. 1. An object has the same weight,
PHYS 160 Astronomy Test #1 Fall 2017 Version B 1 I. True/False (1 point each) Circle the T if the statement is true, or F if the statement is false on your answer sheet. 1. An object has the same weight,
Practice Test DeAnza College Astronomy 04 Test 1 Spring Quarter 2009
 Practice Test DeAnza College Astronomy 04 Test 1 Spring Quarter 2009 Multiple Choice Identify the letter of the choice that best completes the statement or answers the question. Mark answer on Scantron.
Practice Test DeAnza College Astronomy 04 Test 1 Spring Quarter 2009 Multiple Choice Identify the letter of the choice that best completes the statement or answers the question. Mark answer on Scantron.
Astronomy 1143 Quiz 1 Review
 Astronomy 1143 Quiz 1 Review Prof. Pradhan September 7, 2017 I What is Science? 1. Explain the difference between astronomy and astrology. Astrology: nonscience using zodiac sign to predict the future/personality
Astronomy 1143 Quiz 1 Review Prof. Pradhan September 7, 2017 I What is Science? 1. Explain the difference between astronomy and astrology. Astrology: nonscience using zodiac sign to predict the future/personality
Earth Science, 13e Tarbuck & Lutgens
 Earth Science, 13e Tarbuck & Lutgens Origins of Modern Astronomy Earth Science, 13e Chapter 21 Stanley C. Hatfield Southwestern Illinois College Early history of astronomy Ancient Greeks Used philosophical
Earth Science, 13e Tarbuck & Lutgens Origins of Modern Astronomy Earth Science, 13e Chapter 21 Stanley C. Hatfield Southwestern Illinois College Early history of astronomy Ancient Greeks Used philosophical
Astronomy 1010 Planetary Astronomy Sample Questions for Exam 1
 Astronomy 1010 Planetary Astronomy Sample Questions for Exam 1 Chapter 1 1. A scientific hypothesis is a) a wild, baseless guess about how something works. b) a collection of ideas that seems to explain
Astronomy 1010 Planetary Astronomy Sample Questions for Exam 1 Chapter 1 1. A scientific hypothesis is a) a wild, baseless guess about how something works. b) a collection of ideas that seems to explain
lightyears observable universe astronomical unit po- laris perihelion Milky Way
 1 Chapter 1 Astronomical distances are so large we typically measure distances in lightyears: the distance light can travel in one year, or 9.46 10 12 km or 9, 600, 000, 000, 000 km. Looking into the sky
1 Chapter 1 Astronomical distances are so large we typically measure distances in lightyears: the distance light can travel in one year, or 9.46 10 12 km or 9, 600, 000, 000, 000 km. Looking into the sky
Unit 2: Celestial Mechanics
 Unit 2: Celestial Mechanics The position of the Earth Ptolemy (90 168 AD) Made tables that allowed a user to locate the position of a planet at any past, present, or future date. In order to maintain circular
Unit 2: Celestial Mechanics The position of the Earth Ptolemy (90 168 AD) Made tables that allowed a user to locate the position of a planet at any past, present, or future date. In order to maintain circular
Observing the Universe for Yourself
 Observing the Universe for Yourself Figure 6-20 Solar-System Formation What does the universe look like from Earth? With the naked eye, we can see more than 2,000 stars as well as the Milky Way. A constellation
Observing the Universe for Yourself Figure 6-20 Solar-System Formation What does the universe look like from Earth? With the naked eye, we can see more than 2,000 stars as well as the Milky Way. A constellation
Chapter 2 Discovering the Universe for Yourself. Copyright 2012 Pearson Education, Inc.
 Chapter 2 Discovering the Universe for Yourself 1 2.1 Patterns in the Night Sky Our goals for learning: What does the universe look like from Earth? Why do stars rise and set? Why do the constellations
Chapter 2 Discovering the Universe for Yourself 1 2.1 Patterns in the Night Sky Our goals for learning: What does the universe look like from Earth? Why do stars rise and set? Why do the constellations
ASTR-1010: Astronomy I Course Notes Section III
 ASTR-1010: Astronomy I Course Notes Section III Dr. Donald G. Luttermoser Department of Physics and Astronomy East Tennessee State University Edition 2.0 Abstract These class notes are designed for use
ASTR-1010: Astronomy I Course Notes Section III Dr. Donald G. Luttermoser Department of Physics and Astronomy East Tennessee State University Edition 2.0 Abstract These class notes are designed for use
Earth Science, 11e. Origin of Modern Astronomy Chapter 21. Early history of astronomy. Early history of astronomy. Early history of astronomy
 2006 Pearson Prentice Hall Lecture Outlines PowerPoint Chapter 21 Earth Science 11e Tarbuck/Lutgens This work is protected by United States copyright laws and is provided solely for the use of instructors
2006 Pearson Prentice Hall Lecture Outlines PowerPoint Chapter 21 Earth Science 11e Tarbuck/Lutgens This work is protected by United States copyright laws and is provided solely for the use of instructors
Chapter 2 Lecture. The Cosmic Perspective Seventh Edition. Discovering the Universe for Yourself
 Chapter 2 Lecture The Cosmic Perspective Seventh Edition Discovering the Universe for Yourself Discovering the Universe for Yourself 2.1 Patterns in the Night Sky Our goals for learning: What does the
Chapter 2 Lecture The Cosmic Perspective Seventh Edition Discovering the Universe for Yourself Discovering the Universe for Yourself 2.1 Patterns in the Night Sky Our goals for learning: What does the
18. Kepler as a young man became the assistant to A) Nicolaus Copernicus. B) Ptolemy. C) Tycho Brahe. D) Sir Isaac Newton.
 Nicolaus Copernicus. B) Ptolemy. C) Tycho Brahe. D) Sir Isaac Newton.") Name: Date: 1. The word planet is derived from a Greek term meaning A) bright nighttime object. B) astrological sign. C) wanderer. D) nontwinkling star. 2. The planets that were known before the telescope
Name: Date: 1. The word planet is derived from a Greek term meaning A) bright nighttime object. B) astrological sign. C) wanderer. D) nontwinkling star. 2. The planets that were known before the telescope
Introduction To Modern Astronomy II
 ASTR 111 003 Fall 2006 Lecture 03 Sep. 18, 2006 Introduction To Modern Astronomy II Introducing Astronomy (chap. 1-6) Planets and Moons (chap. 7-17) Ch1: Astronomy and the Universe Ch2: Knowing the Heavens
ASTR 111 003 Fall 2006 Lecture 03 Sep. 18, 2006 Introduction To Modern Astronomy II Introducing Astronomy (chap. 1-6) Planets and Moons (chap. 7-17) Ch1: Astronomy and the Universe Ch2: Knowing the Heavens
Chapter 2 Discovering the Universe for Yourself
 Chapter 2 Discovering the Universe for Yourself 2.1 Patterns in the Night Sky Our goals for learning: What does the universe look like from Earth? Why do stars rise and set? Why do the constellations we
Chapter 2 Discovering the Universe for Yourself 2.1 Patterns in the Night Sky Our goals for learning: What does the universe look like from Earth? Why do stars rise and set? Why do the constellations we
Chapter 2 Discovering the Universe for Yourself. What does the universe look like from Earth? Constellations. 2.1 Patterns in the Night Sky
 Chapter 2 Discovering the Universe for Yourself 2.1 Patterns in the Night Sky Our goals for learning: What does the universe look like from Earth? Why do stars rise and set? Why do the constellations we
Chapter 2 Discovering the Universe for Yourself 2.1 Patterns in the Night Sky Our goals for learning: What does the universe look like from Earth? Why do stars rise and set? Why do the constellations we
Test 1 Review Chapter 1 Our place in the universe
 Test 1 Review Bring Gator 1 ID card Bring pencil #2 with eraser No use of calculator or any electronic device during the exam We provide the scantrons Formulas will be projected on the screen You can use
Test 1 Review Bring Gator 1 ID card Bring pencil #2 with eraser No use of calculator or any electronic device during the exam We provide the scantrons Formulas will be projected on the screen You can use
Gravitation Part I. Ptolemy, Copernicus, Galileo, and Kepler
 Gravitation Part I. Ptolemy, Copernicus, Galileo, and Kepler Celestial motions The stars: Uniform daily motion about the celestial poles (rising and setting). The Sun: Daily motion around the celestial
Gravitation Part I. Ptolemy, Copernicus, Galileo, and Kepler Celestial motions The stars: Uniform daily motion about the celestial poles (rising and setting). The Sun: Daily motion around the celestial
AST 2010 Descriptive Astronomy Study Guide Exam I
 AST 2010 Descriptive Astronomy Study Guide Exam I Wayne State University 1 Introduction and overview Identify the most significant structures in the universe: Earth, planets, Sun, solar system, stars,
AST 2010 Descriptive Astronomy Study Guide Exam I Wayne State University 1 Introduction and overview Identify the most significant structures in the universe: Earth, planets, Sun, solar system, stars,
Chapter 1: Discovering the Night Sky. The sky is divided into 88 unequal areas that we call constellations.
 Chapter 1: Discovering the Night Sky Constellations: Recognizable patterns of the brighter stars that have been derived from ancient legends. Different cultures have associated the patterns with their
Chapter 1: Discovering the Night Sky Constellations: Recognizable patterns of the brighter stars that have been derived from ancient legends. Different cultures have associated the patterns with their
Brock University. Test 1, September 2014 Number of pages: 9 Course: ASTR 1P01 Number of Students: 500 Date of Examination: September 29, 2014
 Brock University Test 1, September 2014 Number of pages: 9 Course: ASTR 1P01 Number of Students: 500 Date of Examination: September 29, 2014 Number of hours: 50 min Time of Examination: 18:00 18:50 Instructor:
Brock University Test 1, September 2014 Number of pages: 9 Course: ASTR 1P01 Number of Students: 500 Date of Examination: September 29, 2014 Number of hours: 50 min Time of Examination: 18:00 18:50 Instructor:
MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question.
 Exam 1 Physics 101 Fall 2014 Chapters 1-3 Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) Suppose we look at a photograph of many galaxies.
Exam 1 Physics 101 Fall 2014 Chapters 1-3 Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) Suppose we look at a photograph of many galaxies.
Chapter 2. The Rise of Astronomy. Copyright (c) The McGraw-Hill Companies, Inc. Permission required for reproduction or display.
 The McGraw-Hill Companies, Inc. Permission required for reproduction or display.") Chapter 2 The Rise of Astronomy Copyright (c) The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Periods of Western Astronomy Western astronomy divides into 4 periods Prehistoric
Chapter 2 The Rise of Astronomy Copyright (c) The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Periods of Western Astronomy Western astronomy divides into 4 periods Prehistoric
Astronomy 103: First Exam
 Name: Astronomy 103: First Exam Stephen Lepp September 21, 2010 Each question is worth 2 points. Write your name on this exam and on the scantron. Short Answer Mercury What is the closest Planet to the
Name: Astronomy 103: First Exam Stephen Lepp September 21, 2010 Each question is worth 2 points. Write your name on this exam and on the scantron. Short Answer Mercury What is the closest Planet to the
Chapter 2 Lecture. The Cosmic Perspective Seventh Edition. Discovering the Universe for Yourself Pearson Education, Inc.
 Chapter 2 Lecture The Cosmic Perspective Seventh Edition Discovering the Universe for Yourself Discovering the Universe for Yourself 2.1 Patterns in the Night Sky Our goals for learning: What does the
Chapter 2 Lecture The Cosmic Perspective Seventh Edition Discovering the Universe for Yourself Discovering the Universe for Yourself 2.1 Patterns in the Night Sky Our goals for learning: What does the
Brock University. Test 1, May 2014 Number of pages: 9 Course: ASTR 1P01 Number of Students: 500 Date of Examination: May 21, 2014
 Brock University Test 1, May 2014 Number of pages: 9 Course: ASTR 1P01 Number of Students: 500 Date of Examination: May 21, 2014 Number of hours: 50 min Time of Examination: 14:00 14:50 Instructor: B.Mitrović
Brock University Test 1, May 2014 Number of pages: 9 Course: ASTR 1P01 Number of Students: 500 Date of Examination: May 21, 2014 Number of hours: 50 min Time of Examination: 14:00 14:50 Instructor: B.Mitrović
a. 0.5 AU b. 5 AU c. 50 AU d.* AU e AU
 1 AST104 Sp04: WELCOME TO EXAM 1 Multiple Choice Questions: Mark the best answer choice. Read all answer choices before making selection. (No credit given when multiple answers are marked.) 1. A galaxy
1 AST104 Sp04: WELCOME TO EXAM 1 Multiple Choice Questions: Mark the best answer choice. Read all answer choices before making selection. (No credit given when multiple answers are marked.) 1. A galaxy
Chapter 2 Discovering the Universe for Yourself
 Chapter 2 Discovering the Universe for Yourself 2.1 Patterns in the Night Sky Our goals for learning: What does the universe look like from Earth? Why do stars rise and set? Why do the constellations we
Chapter 2 Discovering the Universe for Yourself 2.1 Patterns in the Night Sky Our goals for learning: What does the universe look like from Earth? Why do stars rise and set? Why do the constellations we
ASTRO 6570 Lecture 1
 ASTRO 6570 Lecture 1 Historical Survey EARLY GREEK ASTRONOMY: Earth-centered universe - Some radical suggestions for a sun-centered model Shape of the Earth - Aristotle (4 th century BCE) made the first
ASTRO 6570 Lecture 1 Historical Survey EARLY GREEK ASTRONOMY: Earth-centered universe - Some radical suggestions for a sun-centered model Shape of the Earth - Aristotle (4 th century BCE) made the first
2) The number one million can be expressed in scientific notation as: (c) a) b) 10 3 c) 10 6 d)
 The number one million can be expressed in scientific notation as: (c) a) b) 10 3 c) 10 6 d)") Astronomy Phys 181 Midterm Examination Choose the best answer from the choices provided. 1) What is the range of values that the coordinate Declination can have? (a) a) -90 to +90 degrees b) 0 to 360 degrees
Astronomy Phys 181 Midterm Examination Choose the best answer from the choices provided. 1) What is the range of values that the coordinate Declination can have? (a) a) -90 to +90 degrees b) 0 to 360 degrees
Name: Class: Date: ID: A
 Name: Class: _ Date: _ Astro Quiz 2 (ch2) Multiple Choice Identify the choice that best completes the statement or answers the question. 1. Star A has an apparent visual magnitude of 13.4 and star B has
Name: Class: _ Date: _ Astro Quiz 2 (ch2) Multiple Choice Identify the choice that best completes the statement or answers the question. 1. Star A has an apparent visual magnitude of 13.4 and star B has
Exam #1 Covers material from first day of class, all the way through Tides and Nature of Light Supporting reading chapters 1-5 Some questions are
 Exam #1 Covers material from first day of class, all the way through Tides and Nature of Light Supporting reading chapters 1-5 Some questions are concept questions, some involve working with equations,
Exam #1 Covers material from first day of class, all the way through Tides and Nature of Light Supporting reading chapters 1-5 Some questions are concept questions, some involve working with equations,
Brock University. Test 1, October 2016 Number of pages: 9 Course: ASTR 1P01 Number of Students: 500 Date of Examination: October 3, 2016
 Brock University Test 1, October 2016 Number of pages: 9 Course: ASTR 1P01 Number of Students: 500 Date of Examination: October 3, 2016 Number of hours: 50 min Time of Examination: 17:00 17:50 Instructor:
Brock University Test 1, October 2016 Number of pages: 9 Course: ASTR 1P01 Number of Students: 500 Date of Examination: October 3, 2016 Number of hours: 50 min Time of Examination: 17:00 17:50 Instructor:
D. A system of assumptions and principles applicable to a wide range of phenomena that has been repeatedly verified
 ASTRONOMY 1 EXAM 1 Name Identify Terms - Matching (20 @ 1 point each = 20 pts.) 1 Solar System G 7. aphelion N 14. eccentricity M 2. Planet E 8. apparent visual magnitude R 15. empirical Q 3. Star P 9.
ASTRONOMY 1 EXAM 1 Name Identify Terms - Matching (20 @ 1 point each = 20 pts.) 1 Solar System G 7. aphelion N 14. eccentricity M 2. Planet E 8. apparent visual magnitude R 15. empirical Q 3. Star P 9.
Announcements. Topics To Be Covered in this Lecture
 Announcements! Tonight s observing session is cancelled (due to clouds)! the next one will be one week from now, weather permitting! The 2 nd LearningCurve activity was due earlier today! Assignment 2
Announcements! Tonight s observing session is cancelled (due to clouds)! the next one will be one week from now, weather permitting! The 2 nd LearningCurve activity was due earlier today! Assignment 2
Intro to Astronomy. Looking at Our Space Neighborhood
 Intro to Astronomy Looking at Our Space Neighborhood Astronomy: The Original Science Ancient cultures used the movement of stars, planets and the moon to mark time Astronomy: the study of the universe
Intro to Astronomy Looking at Our Space Neighborhood Astronomy: The Original Science Ancient cultures used the movement of stars, planets and the moon to mark time Astronomy: the study of the universe
1. The Moon appears larger when it rises than when it is high in the sky because
 2-1 Copyright 2016 All rights reserved. No reproduction or distribution without the prior written consent of 1. The Moon appears larger when it rises than when it is high in the sky because A. you are
2-1 Copyright 2016 All rights reserved. No reproduction or distribution without the prior written consent of 1. The Moon appears larger when it rises than when it is high in the sky because A. you are
The History of Astronomy. Please pick up your assigned transmitter.
 The History of Astronomy Please pick up your assigned transmitter. When did mankind first become interested in the science of astronomy? 1. With the advent of modern computer technology (mid-20 th century)
The History of Astronomy Please pick up your assigned transmitter. When did mankind first become interested in the science of astronomy? 1. With the advent of modern computer technology (mid-20 th century)
Introduction To Modern Astronomy I: Solar System
 ASTR 111 003 Fall 2007 Lecture 02 Sep. 10, 2007 Introduction To Modern Astronomy I: Solar System Introducing Astronomy (chap. 1-6) Planets and Moons (chap. 7-15) Chap. 16: Our Sun Chap. 28: Search for
ASTR 111 003 Fall 2007 Lecture 02 Sep. 10, 2007 Introduction To Modern Astronomy I: Solar System Introducing Astronomy (chap. 1-6) Planets and Moons (chap. 7-15) Chap. 16: Our Sun Chap. 28: Search for
3. Lunar Motions & Eclipses. Lunar Phases: Static & Dynamic. Static & Dynamic Lunar Phases. Earth & Moon: Both Show Phases!
 3. Lunar Motions & Eclipses Lunar motions & lunar phases Lunar axial rotation & orbital revolution Eclipses & the line of nodes Lunar eclipses Solar eclipses Relative Earth-Moon-Sun distances Lunar Motions
3. Lunar Motions & Eclipses Lunar motions & lunar phases Lunar axial rotation & orbital revolution Eclipses & the line of nodes Lunar eclipses Solar eclipses Relative Earth-Moon-Sun distances Lunar Motions
Most of the time during full and new phases, the Moon lies above or below the Sun in the sky.
 6/16 Eclipses: We don t have eclipses every month because the plane of the Moon s orbit about the Earth is different from the plane the ecliptic, the Earth s orbital plane about the Sun. The planes of
6/16 Eclipses: We don t have eclipses every month because the plane of the Moon s orbit about the Earth is different from the plane the ecliptic, the Earth s orbital plane about the Sun. The planes of
2. Knowing the Heavens
 2. Knowing the Heavens Ancient naked-eye astronomy Eighty-eight constellations The sky s ever-changing appearance The celestial sphere Celestial coordinates Seasons: Earth s axial tilt Precession of Earth
2. Knowing the Heavens Ancient naked-eye astronomy Eighty-eight constellations The sky s ever-changing appearance The celestial sphere Celestial coordinates Seasons: Earth s axial tilt Precession of Earth
PHYS 155 Introductory Astronomy
 PHYS 155 Introductory Astronomy - observing sessions: Sunday Thursday, 9pm, weather permitting http://www.phys.uconn.edu/observatory - Exam - Tuesday March 20, - Review Monday 6:30-9pm, PB 38 Marek Krasnansky
PHYS 155 Introductory Astronomy - observing sessions: Sunday Thursday, 9pm, weather permitting http://www.phys.uconn.edu/observatory - Exam - Tuesday March 20, - Review Monday 6:30-9pm, PB 38 Marek Krasnansky
Phys Homework Set 2 Fall 2015 Exam Name
 Exam Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) About how many stars are visible on a clear, dark night with the naked eye alone? 1)
Exam Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) About how many stars are visible on a clear, dark night with the naked eye alone? 1)
Phys Homework Set 2 Fall 2015 Exam Name
 Exam Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) Increasing the temperature of a blackbody by a factor of 2 will increase its energy by
Exam Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) Increasing the temperature of a blackbody by a factor of 2 will increase its energy by
Dr. Tariq Al-Abdullah
 1 Chapter 1 Charting the Heavens The Foundations of Astronomy 2 Learning Goals: 1. Our Place in Space 2. The Obvious view 3. Earth s Orbital Motion 4. The Motion of the Moon 5. The Measurement of Distance
1 Chapter 1 Charting the Heavens The Foundations of Astronomy 2 Learning Goals: 1. Our Place in Space 2. The Obvious view 3. Earth s Orbital Motion 4. The Motion of the Moon 5. The Measurement of Distance
Chapter. Origin of Modern Astronomy
 Chapter Origin of Modern Astronomy 22.1 Early Astronomy Ancient Greeks Astronomy is the science that studies the universe. It includes the observation and interpretation of celestial bodies and phenomena.
Chapter Origin of Modern Astronomy 22.1 Early Astronomy Ancient Greeks Astronomy is the science that studies the universe. It includes the observation and interpretation of celestial bodies and phenomena.
d. Galileo Galilei i. Heard about lenses being used to magnify objects 1. created his own telescopes to 30 power not the inventor! 2. looked
 1. Age of Reason a. Nicolaus Copernicus 1473-1543 i. Commenteriolus manuscript circulated from 1512 1. unpublished 2. Heliocentric hypothesis ii. On the Revolutions of the Planets published year of his
1. Age of Reason a. Nicolaus Copernicus 1473-1543 i. Commenteriolus manuscript circulated from 1512 1. unpublished 2. Heliocentric hypothesis ii. On the Revolutions of the Planets published year of his
Orbital Mechanics. CTLA Earth & Environmental Science
 Orbital Mechanics CTLA Earth & Environmental Science The Earth Spherical body that is flattened near the poles due to centrifugal force (rotation of the Earth) 40,074 KM across at the Equator 40,0007 KM
Orbital Mechanics CTLA Earth & Environmental Science The Earth Spherical body that is flattened near the poles due to centrifugal force (rotation of the Earth) 40,074 KM across at the Equator 40,0007 KM
Astronomy I Exam I Sample Name: Read each question carefully, and choose the best answer.
 Name: Read each question carefully, and choose the best answer. 1. During a night in Schuylkill Haven, most of the stars in the sky (A) are stationary through the night. (B) the actual motion depends upon
Name: Read each question carefully, and choose the best answer. 1. During a night in Schuylkill Haven, most of the stars in the sky (A) are stationary through the night. (B) the actual motion depends upon
a. 0.1 AU b. 10 AU c light years d light years
 1 AST104 Sp2006: EXAM 1 Multiple Choice Questions: Mark the best answer choice on the bubble form. Read all answer choices before making selection. (No credit given when multiple answers are marked.) 1.
1 AST104 Sp2006: EXAM 1 Multiple Choice Questions: Mark the best answer choice on the bubble form. Read all answer choices before making selection. (No credit given when multiple answers are marked.) 1.
The celestial sphere, the coordinates system, seasons, phases of the moon and eclipses. Chapters 2 and S1
 The celestial sphere, the coordinates system, seasons, phases of the moon and eclipses Chapters 2 and S1 The celestial sphere and the coordinates system Chapter S1 How to find our way in the sky? Let s
The celestial sphere, the coordinates system, seasons, phases of the moon and eclipses Chapters 2 and S1 The celestial sphere and the coordinates system Chapter S1 How to find our way in the sky? Let s
PHYS 160 Astronomy Test #1 Name Answer Key Test Version A
 PHYS 160 Astronomy Test #1 Name Answer Key Test Version A True False Multiple Choice 1. T 1. C 2. F 2. B 3. T 3. A 4. T 4. E 5. T 5. B 6. F 6. A 7. F 7. A 8. T 8. D 9. F 9. D 10. F 10. B 11. B 12. D Definitions
PHYS 160 Astronomy Test #1 Name Answer Key Test Version A True False Multiple Choice 1. T 1. C 2. F 2. B 3. T 3. A 4. T 4. E 5. T 5. B 6. F 6. A 7. F 7. A 8. T 8. D 9. F 9. D 10. F 10. B 11. B 12. D Definitions
How big is the Universe and where are we in it?
 Announcements Results of clicker questions from Monday are on ICON. First homework is graded on ICON. Next homework due one minute before midnight on Tuesday, September 6. Labs start this week. All lab
Announcements Results of clicker questions from Monday are on ICON. First homework is graded on ICON. Next homework due one minute before midnight on Tuesday, September 6. Labs start this week. All lab
Chapter 02 The Rise of Astronomy
 Chapter 02 The Rise of Astronomy Multiple Choice Questions 1. The moon appears larger when it rises than when it is high in the sky because A. You are closer to it when it rises (angular-size relation).
Chapter 02 The Rise of Astronomy Multiple Choice Questions 1. The moon appears larger when it rises than when it is high in the sky because A. You are closer to it when it rises (angular-size relation).
2.1 Patterns in the Night Sky
 2.1 Patterns in the Night Sky Our goals for learning: What are constellations? How do we locate objects in the sky? Why do stars rise and set? Why don t we see the same constellations throughout the year?
2.1 Patterns in the Night Sky Our goals for learning: What are constellations? How do we locate objects in the sky? Why do stars rise and set? Why don t we see the same constellations throughout the year?
Learning Objectives. one night? Over the course of several nights? How do true motion and retrograde motion differ?
 Kepler s Laws Learning Objectives! Do the planets move east or west over the course of one night? Over the course of several nights? How do true motion and retrograde motion differ?! What are geocentric
Kepler s Laws Learning Objectives! Do the planets move east or west over the course of one night? Over the course of several nights? How do true motion and retrograde motion differ?! What are geocentric
Brock University. Test 1, October 2017 Number of pages: 9 Course: ASTR 1P01, Section 1 Number of Students: 470 Date of Examination: October 3, 2017
 Brock University Test 1, October 2017 Number of pages: 9 Course: ASTR 1P01, Section 1 Number of Students: 470 Date of Examination: October 3, 2017 Number of hours: 50 min Time of Examination: 17:00 17:50
Brock University Test 1, October 2017 Number of pages: 9 Course: ASTR 1P01, Section 1 Number of Students: 470 Date of Examination: October 3, 2017 Number of hours: 50 min Time of Examination: 17:00 17:50
Topic 10: Earth in Space Workbook Chapters 10 and 11
 Topic 10: Earth in Space Workbook Chapters 10 and 11 We can imagine all the celestial objects seen from Earth the sun, stars, the Milky way, and planets as being positioned on a celestial sphere. Earth
Topic 10: Earth in Space Workbook Chapters 10 and 11 We can imagine all the celestial objects seen from Earth the sun, stars, the Milky way, and planets as being positioned on a celestial sphere. Earth
4. Gravitation & Planetary Motion. Mars Motion: 2005 to 2006
 4. Gravitation & Planetary Motion Geocentric models of ancient times Heliocentric model of Copernicus Telescopic observations of Galileo Galilei Systematic observations of Tycho Brahe Three planetary laws
4. Gravitation & Planetary Motion Geocentric models of ancient times Heliocentric model of Copernicus Telescopic observations of Galileo Galilei Systematic observations of Tycho Brahe Three planetary laws
Astr 1050 Mon. Jan. 31, 2017
 Astr 1050 Mon. Jan. 31, 2017 Finish Ch. 2: Eclipses & Planetary Motion Seasons Angular Size formula Eclipses Planetary Motion Reading: For Today: Finish Chapter 2 For Monday: Start Chapter 3 Homework on
Astr 1050 Mon. Jan. 31, 2017 Finish Ch. 2: Eclipses & Planetary Motion Seasons Angular Size formula Eclipses Planetary Motion Reading: For Today: Finish Chapter 2 For Monday: Start Chapter 3 Homework on
ASTRONOMY 1010 Exam 1 September 21, 2007
 ASTRONOMY 1010 Exam 1 September 21, 2007 Name Please write and mark your name and student number in the Scantron answer sheet. FILL THE BUBBLE IN THE "TEST FORM" BOX CORRESPONDING TO YOUR TEST VERSION
ASTRONOMY 1010 Exam 1 September 21, 2007 Name Please write and mark your name and student number in the Scantron answer sheet. FILL THE BUBBLE IN THE "TEST FORM" BOX CORRESPONDING TO YOUR TEST VERSION
History of Astronomy. Historical People and Theories
 History of Astronomy Historical People and Theories Plato Believed he could solve everything through reasoning. Circles and Spheres are good because they are perfect (never ending) and pleasing to the
History of Astronomy Historical People and Theories Plato Believed he could solve everything through reasoning. Circles and Spheres are good because they are perfect (never ending) and pleasing to the
The point in an orbit around the Sun at which an object is at its greatest distance from the Sun (Opposite of perihelion).
.") ASTRONOMY TERMS Albedo Aphelion Apogee A measure of the reflectivity of an object and is expressed as the ratio of the amount of light reflected by an object to that of the amount of light incident upon
ASTRONOMY TERMS Albedo Aphelion Apogee A measure of the reflectivity of an object and is expressed as the ratio of the amount of light reflected by an object to that of the amount of light incident upon
Exam #1 Study Guide (Note this is not all the information you need to know for the test, these are just SOME of the main points)
") Exam #1 Study Guide (Note this is not all the information you need to know for the test, these are just SOME of the main points) Moon Phases Moon is always ½ illuminated by the Sun, and the sunlit side
Exam #1 Study Guide (Note this is not all the information you need to know for the test, these are just SOME of the main points) Moon Phases Moon is always ½ illuminated by the Sun, and the sunlit side
Lecture #5: Plan. The Beginnings of Modern Astronomy Kepler s Laws Galileo
 Lecture #5: Plan The Beginnings of Modern Astronomy Kepler s Laws Galileo Geocentric ( Ptolemaic ) Model Retrograde Motion: Apparent backward (= East-to-West) motion of a planet with respect to stars Ptolemy
Lecture #5: Plan The Beginnings of Modern Astronomy Kepler s Laws Galileo Geocentric ( Ptolemaic ) Model Retrograde Motion: Apparent backward (= East-to-West) motion of a planet with respect to stars Ptolemy
Position 3. None - it is always above the horizon. Agree with student 2; star B never crosses horizon plane, so it can t rise or set.
 Position 3 None - it is always above the horizon. N E W S Agree with student 2; star B never crosses horizon plane, so it can t rise or set. Imaginary plane No; the Earth blocks the view. Star A at position
Position 3 None - it is always above the horizon. N E W S Agree with student 2; star B never crosses horizon plane, so it can t rise or set. Imaginary plane No; the Earth blocks the view. Star A at position
Origin of Modern Astronomy Chapter 21
 Origin of Modern Astronomy Chapter 21 Early history of astronomy Ancient Greeks Used philosophical arguments to explain natural phenomena Also used some observa:onal data (looking at the night sky) Ancient
Origin of Modern Astronomy Chapter 21 Early history of astronomy Ancient Greeks Used philosophical arguments to explain natural phenomena Also used some observa:onal data (looking at the night sky) Ancient
2. Modern: A constellation is a region in the sky. Every object in the sky, whether we can see it or not, is part of a constellation.
 6/14 10. Star Cluster size about 10 14 to 10 17 m importance: where stars are born composed of stars. 11. Galaxy size about 10 21 m importance: provide a stable environment for stars. Composed of stars.
6/14 10. Star Cluster size about 10 14 to 10 17 m importance: where stars are born composed of stars. 11. Galaxy size about 10 21 m importance: provide a stable environment for stars. Composed of stars.
Astronomy is the oldest science! Eclipses. In ancient times the sky was not well understood! Bad Omens? Comets
 Astronomy is the oldest science! In ancient times the sky was not well understood! Eclipses Bad Omens? Comets 1 The Ancient Greeks The Scientific Method Our ideas must always be consistent with our observations!
Astronomy is the oldest science! In ancient times the sky was not well understood! Eclipses Bad Omens? Comets 1 The Ancient Greeks The Scientific Method Our ideas must always be consistent with our observations!
Name: Exam 1, 9/30/05
 Multiple Choice: Select the choice that best answers each question. Write your choice in the blank next to each number. (2 points each) 1. At the North Pole in mid-november, the sun rises at a. North of
Multiple Choice: Select the choice that best answers each question. Write your choice in the blank next to each number. (2 points each) 1. At the North Pole in mid-november, the sun rises at a. North of
Knowing the Heavens. Goals: Constellations in the Sky
 Goals: Knowing the Heavens To see how the sky changes during a night and from night to night. To measure the positions of stars in celestial coordinates. To understand the cause of the seasons. Constellations
Goals: Knowing the Heavens To see how the sky changes during a night and from night to night. To measure the positions of stars in celestial coordinates. To understand the cause of the seasons. Constellations
Lecture 13. Gravity in the Solar System
 Lecture 13 Gravity in the Solar System Guiding Questions 1. How was the heliocentric model established? What are monumental steps in the history of the heliocentric model? 2. How do Kepler s three laws
Lecture 13 Gravity in the Solar System Guiding Questions 1. How was the heliocentric model established? What are monumental steps in the history of the heliocentric model? 2. How do Kepler s three laws
Knowing the Heavens. Goals: Constellations in the Sky
 Goals: Knowing the Heavens To see how the sky changes during a night and from night to night. To measure the positions of stars in celestial coordinates. To understand the cause of the seasons. Constellations
Goals: Knowing the Heavens To see how the sky changes during a night and from night to night. To measure the positions of stars in celestial coordinates. To understand the cause of the seasons. Constellations
7.4 Universal Gravitation
 Circular Motion Velocity is a vector quantity, which means that it involves both speed (magnitude) and direction. Therefore an object traveling at a constant speed can still accelerate if the direction
Circular Motion Velocity is a vector quantity, which means that it involves both speed (magnitude) and direction. Therefore an object traveling at a constant speed can still accelerate if the direction
Name and Student ID Section Day/Time:
 AY2 - Overview of the Universe - Midterm #1 - Instructor: Maria F. Duran Name and Student ID Section Day/Time: 1) Imagine we ve discovered a planet orbiting another star at 1 AU every 6 months. The planet
AY2 - Overview of the Universe - Midterm #1 - Instructor: Maria F. Duran Name and Student ID Section Day/Time: 1) Imagine we ve discovered a planet orbiting another star at 1 AU every 6 months. The planet
Science : Introduction to Astronomy. Lecture 2 : Visual Astronomy -- Stars and Planets. Robert Fisher
 Science 3210 001 : Introduction to Astronomy Lecture 2 : Visual Astronomy -- Stars and Planets Robert Fisher Items Add/Drop Day Office Hours Vote 5 PM Tuesday 5 PM Thursday 12 Noon Friday Course Webpage
Science 3210 001 : Introduction to Astronomy Lecture 2 : Visual Astronomy -- Stars and Planets Robert Fisher Items Add/Drop Day Office Hours Vote 5 PM Tuesday 5 PM Thursday 12 Noon Friday Course Webpage
Astronomy. Today: Eclipses and the Motion of the Moon. First homework on WebAssign is due Thursday at 11:00pm
 Astronomy A. Dayle Hancock adhancock@wm.edu Small 239 Today: Eclipses and the Motion of the Moon > > > Office hours: MTWR 10-11am First homework on WebAssign is due Thursday at 11:00pm > > > Phases of
Astronomy A. Dayle Hancock adhancock@wm.edu Small 239 Today: Eclipses and the Motion of the Moon > > > Office hours: MTWR 10-11am First homework on WebAssign is due Thursday at 11:00pm > > > Phases of
Distance and Size of a Celestial Body
 PHYS 320 Lecture 2 Distance and Size of a Celestial Body Jiong Qiu MSU Physics Department Wenda Cao NJIT Physics Department Outline q Lecture 2 Distance and Size of a Celestial Body n n n n n n n n 2.1
PHYS 320 Lecture 2 Distance and Size of a Celestial Body Jiong Qiu MSU Physics Department Wenda Cao NJIT Physics Department Outline q Lecture 2 Distance and Size of a Celestial Body n n n n n n n n 2.1
REVIEW CH #0. 1) Right ascension in the sky is very similar to latitude on the Earth. 1)
 Right ascension in the sky is very similar to latitude on the Earth. 1)") REVIEW CH #0 TRUE/FALSE. Write 'T' if the statement is true and 'F' if the statement is false. 1) Right ascension in the sky is very similar to latitude on the Earth. 1) 2) Latitude and right ascension
REVIEW CH #0 TRUE/FALSE. Write 'T' if the statement is true and 'F' if the statement is false. 1) Right ascension in the sky is very similar to latitude on the Earth. 1) 2) Latitude and right ascension
AST 1002 Section 1 (Dobrosavljevic) PLANETS, STARS, GALAXIES
 PLANETS, STARS, GALAXIES") Your name (print) Your FSUID AST 1002 Section 1 (Dobrosavljevic) PLANETS, STARS, GALAXIES Midterm Exam 1, Fall 2018 Instructions: 1. Use a pencil for marking the machine scoring sheet. 2. Enter and encode
Your name (print) Your FSUID AST 1002 Section 1 (Dobrosavljevic) PLANETS, STARS, GALAXIES Midterm Exam 1, Fall 2018 Instructions: 1. Use a pencil for marking the machine scoring sheet. 2. Enter and encode
UNIT 3: EARTH S MOTIONS
 UNIT 3: EARTH S MOTIONS After Unit 3 you should be able to: o Differentiate between rotation and revolution of the Earth o Apply the rates of rotation and revolution to basic problems o Recall the evidence
UNIT 3: EARTH S MOTIONS After Unit 3 you should be able to: o Differentiate between rotation and revolution of the Earth o Apply the rates of rotation and revolution to basic problems o Recall the evidence
Ch 22 Origin of Modern Astronomy Notes Ch 22.1 Early Astronomers Astronomy Astrology A. Ancient Greece B. Two Basic Theories Existed:
 Ch 22 Origin of Modern Astronomy Notes Ch 22.1 Early Astronomers Astronomy: The science that studies the universe, dealing with properties of objects in space. Astrology: A belief that the positions of
Ch 22 Origin of Modern Astronomy Notes Ch 22.1 Early Astronomers Astronomy: The science that studies the universe, dealing with properties of objects in space. Astrology: A belief that the positions of
Today. Tropics & Arctics Precession Phases of the Moon Eclipses. Ancient Astronomy. Lunar, Solar FIRST HOMEWORK DUE NEXT TIME
 Today Tropics & Arctics Precession Phases of the Moon Eclipses Lunar, Solar Ancient Astronomy FIRST HOMEWORK DUE NEXT TIME Tropic: Latitude where the sun [just] reaches the zenith at noon on the summer
Today Tropics & Arctics Precession Phases of the Moon Eclipses Lunar, Solar Ancient Astronomy FIRST HOMEWORK DUE NEXT TIME Tropic: Latitude where the sun [just] reaches the zenith at noon on the summer
ASTR 2310: Chapter 2
 Emergence of Modern Astronomy Early Greek Astronomy Ptolemaic Astronomy Copernican Astronomy Galileo: The First Modern Scientist Kepler's Laws of Planetary Motion Proof of the Earth's Motion Early Greek
Emergence of Modern Astronomy Early Greek Astronomy Ptolemaic Astronomy Copernican Astronomy Galileo: The First Modern Scientist Kepler's Laws of Planetary Motion Proof of the Earth's Motion Early Greek
Introduction to Astronomy
 Introduction to Astronomy AST0111-3 (Astronomía) Semester 2014B Prof. Thomas H. Puzia Theme Our Sky 1. Celestial Sphere 2. Diurnal Movement 3. Annual Movement 4. Lunar Movement 5. The Seasons 6. Eclipses
Introduction to Astronomy AST0111-3 (Astronomía) Semester 2014B Prof. Thomas H. Puzia Theme Our Sky 1. Celestial Sphere 2. Diurnal Movement 3. Annual Movement 4. Lunar Movement 5. The Seasons 6. Eclipses
Lecture 2. ASTR 111 Section 002 Introductory Astronomy: Solar System. Dr. Weigel
 Lecture 2 ASTR 111 Section 002 Introductory Astronomy: Solar System Dr. Weigel Reading for this week The reading for this week is Chapter 1 (all) and Chapter 2 (sections 2.1 2.2 only) The quiz will cover
Lecture 2 ASTR 111 Section 002 Introductory Astronomy: Solar System Dr. Weigel Reading for this week The reading for this week is Chapter 1 (all) and Chapter 2 (sections 2.1 2.2 only) The quiz will cover
Benefit of astronomy to ancient cultures
 Benefit of astronomy to ancient cultures Usefulness as a tool to predict the weather (seasons) Usefulness as a tool to tell time (sundials) Central Africa (6500 B.C.) Alignments Many ancient cultures built
Benefit of astronomy to ancient cultures Usefulness as a tool to predict the weather (seasons) Usefulness as a tool to tell time (sundials) Central Africa (6500 B.C.) Alignments Many ancient cultures built
Ast ch 4-5 practice Test Multiple Choice
 Ast ch 4-5 practice Test Multiple Choice 1. The distance from Alexandria to Syene is about 500 miles. On the summer solstice the sun is directly overhead at noon in Syene. At Alexandria on the summer solstice,
Ast ch 4-5 practice Test Multiple Choice 1. The distance from Alexandria to Syene is about 500 miles. On the summer solstice the sun is directly overhead at noon in Syene. At Alexandria on the summer solstice,