MODELING OF CONTROL SYSTEMS
|
|
|
- Aubrie Hunter
- 5 years ago
- Views:
Transcription


1 1 MODELING OF CONTROL SYSTEMS Feb-15 Dr. Mohammed Morsy
2 Outline Introduction Differential equations and Linearization of nonlinear mathematical models Transfer function and impulse response function Laplace transform review Block diagram and signal flow graph Reference: Chapter 2: Modern Control Systems, Richard Dorf, Robert Bishop Feb-15 2
3 The materials of this presentation are based on the Lecture note slides of the Control System Engineering (Fall 2008) course offered by Prof. Bin Jiang and Dr. Ruiyun QI, Nanjing University of Aeronautics and Astronautics (NUAA), China Feb-15 3
4 Introduction How to analyze and design a control system r Expected value - e Error Controller Actuator Plant u n Disturbance y Controlled variable Sensor The first thing is to establish system model (mathematical model) Feb-15 4
5 Introduction (2) A mathematical model of a dynamic system is defined as a set of equations that represents the dynamics of the system accurately The dynamics of many systems may be described in terms of differential equations obtained from physical laws governing a particular system In obtaining a mathematical model, we must make a compromise between the simplicity of the model and the accuracy of the results of the analysis In general, in solving a new problem, it is desirable to build a simplified model so that we can get a general feeling for the solution Feb-15 5
6 System Model System Model is A mathematical expression of dynamic relationship between input and output of a system. A mathematical model is the foundation to analyze and design automatic control systems No mathematical model of a physical system is exact. We generally strive to develop a model that is adequate for the problem at hand but without making the model overly complex. Feb-15 6
7 System Model (2) Differential equation Transfer function Frequency characteristic Study time-domain response Transfer function Linear system Differential Laplace equation transform study frequency-domain response Frequency Fourier characteristics transform Feb-15 7
8 Modeling Methods According to Analytic method A. Newton s Law of Motion B. Law of Kirchhoff C. System structure and parameters the mathematical expression of system input and output can be derived. Thus, we build the mathematical model ( suitable for simple systems). Feb-15 8
9 Modeling Methods(2) System identification method Building the system model based on the system input output charecteristics This method is usually applied when there are little information available for the system. Input Black box Output Neural Networks, Fuzzy Systems Black box: the system is totally unknown. Grey box: the system is partially known. Feb-15 9
10 Modeling Methods (3) Why Focus on Linear Time-Invariant (LTI) System? What is linear system? A system is called linear if the principle of superposition applies u () t y () t 1 1 system u () t y () t system 2 2 u ( t) u ( t) y system y Is y(t)=u(t)+2 a linear system? EE 391 Control Systems and Their Components Feb-15 10
11 Modeling Methods (4) The overall response of a linear system can be obtained by Decomposing the input into a sum of elementary signals Figuring out each response to the respective elementary signal Adding all these responses together Thus, we can use typical elementary signal (e.g. unit step,unit impulse, unit ramp) to analyze system for the sake of simplicity. EE 391 Control Systems and Their Components Feb-15 11
12 Modeling Methods (4) What is time-invariant system? A system is called timeinvariant if the parameters are stationary with respect to time during system operation Examples? EE 391 Control Systems and Their Components Feb-15 12
13 2.2 Establishment of differential equation and linearization 13
14 Differential equation Linear ordinary differential equations --- A wide range of systems in engineering are modeled mathematically by differential equations --- In general, the differential equation of an n-th order system is written a c ( t) a c ( t) a c ( t) c( t) ( n) ( n1) (1) 0 1 n1 b r ( t) b r ( t) b r( t) ( m) (1) 0 m1 m Time-domain model 14
15 How to establish ODE of a control system --- list differential equations according to the physical rules of each component; --- obtain the differential equation sets by eliminating intermediate variables; --- get the overall input-output differential equation of control system. 15
16 Examples-1 RLC circuit R L u(t) i(t) C u c (t) Input Output u(t) system u c (t) Defining the input and output according to which cause-effect relationship you are interested in. 16
17 R L According to Law of Kirchhoff in electricity u(t) i(t) C u c (t) di() t u( t) Ri( t) L uc( t) (1) dt ( ) 1 ( ) (2) du uc t C i t dt () () t i t C C dt 2 duc ( t) d uc ( t) u( t) RC LC 2 dt dt u C ( t) 17
18 It is re-written as in standard form LCu ( t) RCu ( t) u ( t) u( t) C C C Generally,we set the output on the left side of the equation the input on the right side the input is arranged from the highest order to the lowest order 18
 t We are interested in the relationship between external force F(t) and mass displacement x(t) Define: input F(t);")
19 Examples-2 Mass-spring-friction system Gravity is neglected. F1 kx() t We are interested in the relationship between external force F(t) and mass displacement x(t) Define: input F(t); output---x(t) F2 fv() t F(t) F ma ma F F1 F2 v dx() t, dt a 2 d x t () dt 19
20 By eliminating intermediate variables, we obtain the overall input-output differential equation of the mass-spring-friction system. mx( t) f x( t) kx( t) F( t) Recall the RLC circuit system LCu ( t) RCu ( t) u ( t) u( t) c c c These formulas are similar, that is, we can use the same mathematical model to describe a class of systems that are physically absolutely different but share the same Motion Law. 20
21 ODEs of Some Electrical and Mechanical systems Feb-15 21
22 Examples-3 nonlinear system In reality, most systems are indeed nonlinear, e.g. then pendulum system, which is described by nonlinear differential equations. 2 d ML Mg sin ( t) 0 2 dt It is difficult to analyze nonlinear systems, however, we can linearize the nonlinear system near its equilibrium point under certain conditions. L Mg 2 d ML Mg( t) 0 (when is small) 2 dt 22
23 Linearization of nonlinear differential equations Several typical nonlinear characteristics in control system. output output 0 input 0 input Saturation (Amplifier) Dead-zone (Motor) 23
24 Methods of linearization (1)Weak nonlinearity neglected If the nonlinearity of the component is not within its linear working region, its effect on the system is weak and can be neglected. (2)Small perturbation/error method Assumption: In the system control process, there are just small changes around the equilibrium point in the input and output of each component. This assumption is reasonable in many practical control system: in closed-loop control system, once the deviation occurs, the control mechanism will reduce or eliminate it. Consequently, all the components can work around the equilibrium point. 24
25 y Example ECE Department- Faculty of Engineering - Alexandria University 2015 y0 0 x0 x dy y f ( x) y 饱和 ( 放大器 ) dx The input and output only have small n variance around the equilibrium point. x ( x x0 ),( x) 0 dy y y ( x x ) 0 0 dx x y A(x0,y0) Saturation (Amplifier) 0 kx y=f(x) A(x0,y0) is equilibrium point. Expanding the nonlinear function y=f(x) into a Taylor series about A(x0,y0) yields ( x x0 ) ( x x 2 0 ) x 2! dx 0 x 1 d y 0 This is linearized model of the nonlinear component. 25
26 Note:this method is only suitable for systems with weak nonlinearity. 0 0 继电特性 Relay 饱和特性 Saturation For systems with strong nonlinearity, we cannot use such linearization method. 26
27 Example Linearize the nonlinear equation Z=XY in the region 5 x 7, 10 y 12. Find the error if the linearized equation is used to calculate the value of z when x=5, y=10 Solution: Choose x, y as the average values of the given ranges Then Feb-15 27
28 Example (2) Expanding the nonlinear equation into a Taylor series about points x = x, y = y and neglecting the higherorder terms Where Feb-15 28
29 Example (3) Hence the linearized equation is or When x=5, y=10,the value of z given by the linearized equation is The exact value of z is z = xy =50 The error is thus 50-49=1 or 2% Feb-15 29
30 Exercise E1. Please build the differential equation of the following system. C R Input 1 R 2 Output u ( t ) u ( t) r c R i 1 i dt C 1 duc dur ( 1 2) c i i i R R C R R u R R C R u dt dt uc R2i ur R11 i uc 30 r
31 2-3 Transfer function 31
 To find a particular solution of the complete equation (involving constructing the family of a function) 32")
32 Solving Differential Equations Example Solving linear differential equations with constant coefficients: To find the general solution (involving solving the characteristic equation) To find a particular solution of the complete equation (involving constructing the family of a function) 32
33 WHY need LAPLACE transform? Difficult Time-domain ODE problems Laplace Transform (LT) s-domain algebra problems Easy Solutions of timedomain problems Inverse LT Solutions of algebra problems 33
34 Laplace Transform The Laplace transform of a function f(t) is defined as F( s) f ( t) 0 f ( t) e st dt where s j is a complex variable 34
35 Examples Step signal: f(t)=a st F( s) f ( t) e dt 0 0 Ae st dt A e s st 0 A s Exponential signal f(t)= Fs () at st e e dt 0 s e at 1 ( as) t a e 0 s 1 a 35
36 Laplace transform table f(t) F(s) f(t) F(s) δ(t) 1 1 t e at 1 s 1 2 s 1 s a sin wt cos wt e at sin wt e at cos wt s s w w 2 2 s w 2 2 w 2 2 ( s a) w s a 2 2 ( s a) w 36
37 Properties of Laplace Transform (1) Linearity [ af ( t) bf ( t)] a [ f ( t)] b [ f ( t)] (2) Differentiation df () t sf ( s ) f (0) dt Using Integration By Parts method to prove where f(0) is the initial value of f(t). n d f () t (1) s F s n s f s f f dt n n 1 n 2 ( n 1) ( ) (0) (0) (0) 37
38 Properties of Laplace Transform (2) (3) Integration t F( s) f() d 0 s Using Integration By Parts method to prove ) t1 t2 t n o o o f () ddt dt dtn F( s) s n 38
39 Properties of Laplace Transform (3) (4)Final-value Theorem lim t f ( t) limsf( s) s0 The final-value theorem relates the steady-state behavior of f(t) to the behavior of sf(s) in the neighborhood of s=0 (5) Initial-value Theorem lim t0 f ( t) lim s sf( s) 39
40 Properties of Laplace Transform (4) (6)Shifting Theorem: a. shift in time (real domain) [ f( t )] e s F() s b. shift in complex domain [ e at f ( t)] F( s a) (7) Real convolution (Complex multiplication) Theorem t [ f ( t ) f ( ) d ] F ( s) F ( s)
41 Inverse Laplace transform Definition:Inverse Laplace transform, denoted by 1 [ Fs ( )] is given by st f ( t) [ F( s)] F( s) e ds( t 0) 2 j 1 1 Cj Cj where C is a real constant Note: The inverse Laplace transform operation involving rational functions can be carried out using Laplace transform table and partial-fraction expansion. 41
42 Partial-Fraction Expansion method for finding Inverse Laplace Transform Ns () b s b s b s bm F( s) ( m n) D() s s a s a s a m m1 0 1 m1 n n1 1 n1 If F(s) is broken up into components F( s) F ( s) F ( s) F ( s) f ( t) f ( t)... f ( t) If the inverse Laplace transforms of components are readily available, then F( s) F ( s) F ( s) F ( s) n n n n 42
43 Poles and zeros Poles A complex number s 0 is said to be a pole of a complex variable function F(s) if F(s 0 )=. Zeros A complex number s 0 is said to be a zero of a complex variable function F(s) if F(s 0 )=0 Examples: ( s 1)( s 2) ( s 3)( s 4) s 2 s 1 2s 2 poles: -3, -4; zeros: 1, -2 poles: -1+j, -1-j; zeros: -1 43
44 Case 1: F(s) has simple real poles Fs () Ns () b s b s b s b D() s s a s a s a m m1 0 1 m1 n n1 1 n1 n m where p ( i 1, 2,, n) are eigenvalues of D( s) 0, and i Ns () ci ( s pi ) () Ds s pi Partial-Fraction Expansion c c cn s p s p s p n Inverse LT c e p t c e p t... c e n f() t n pt Parameters pk give shape and numbers ck give magnitudes. 44
45 Example 1 1 Fs () ( s 1)( s 2)( s 3) c c c c3 s 1 s 2 s c2 ( s 2) 1 ( 1)( 2)( 3) s s s 15 c ( s 1) ( 1)( 2) ( 3) s s s 6 Partial-Fraction Expansion s1 s2 1 1 ( 1)( 2) ( 3) ( 3) s s s s 10 s Fs () 6 s 1 15 s 2 10 s 3 1 t 1 2t 1 3t f () t e e e
46 Case 2: F(s) has simple complex-conjugate poles Example 2 Laplace transform Applying initial conditions Ys () s Partial-Fraction Expansion Inverse Laplace transform 2 s 5 4s5 yt s ( s 2) 1 s 2 ( s 2) t 2t () e cos t 3e sin s 23 ( s 2) 1 3 ( s 2) 1 t 46
47 b Case 3: F(s) has multiple-order poles N( s) N( s) Fs () D( s) ( s p )( s p ) ( s p )( s p ) 1 2 nr c c b b b s p s p s p s p s p 1 nl l l1 1 l l1 1 nl ( i) ( i) l d l b ( ) ( ), 1 ()( ) l F s s pi bl,, Fs s pi s p 1 ds lm Simple poles Multi-order poles The coefficients c,, of simple poles can be calculated as Case 1; 1 cn l The coefficients corresponding to the multi-order poles are determined as 1 i l s pi 1 m 1 ( ) ( ), 1 l d N s l d N s l ( ) 1 ( )! s pi ( ) b ( 1)! s pi m ( ) ds D s l ds D s sp sp i i 47
 Ys () Partial-Fraction Expansion 1 s 1 ss ( 1) 3 s= -1 is a 3- order pole c1 b3 b2 b1 3 2 s ( s 1) ( s 1) s 1")
48 Example 3 Laplace transform: s Y( s) s y(0) sy( 0) y(0) 3 s Y( s) 3 sy(0) 3 y(0) 3 sy( s) 3y( 0) Y( s) Applying initial conditions: Ys () Ys () Partial-Fraction Expansion 1 s 1 ss ( 1) 3 s= -1 is a 3- order pole c1 b3 b2 b1 3 2 s ( s 1) ( s 1) s 1 48
49 Determining coefficients: b 1 [ ( s1) ] 1 ss ( 1) s1 c 1 s ss ( 1) s s1 ( 1) 1 ds s s s ds s s b1 (2 s ) 1 2! s1 d 1 d 1 b [ ( s 1) ] [ ( )] ( s ) Ys () s s s s 3 2 ( 1) ( 1) 1 Inverse Laplace transform: 1 y t t e te e 2 t t t ( )
50 Transfer function Input u(t) LTI system Output y(t) Consider a linear system described by differential equation y ( t) a y ( t) a y( t) b u ( t) b u ( t) bu ( t) b u( t) ( n) ( n1) ( m) ( m1) (1) n1 0 m m1 0 Assume all initial conditions are zero, we get the transfer function(tf) of the system as TF G() s output y() t input u() t zero initial condition m Y() s bms b s... b s b n U ( s) s a s... a s a m1 m1 1 0 n1 n
51 Example 1. Find the transfer function of the RLC R L Input Solution: C u(t) i(t) u c (t) Output 1) Writing the differential equation of the system according to physical law: LCu ( t) RCu ( t) u ( t) u( t) C C C 2) Assuming all initial conditions are zero and applying Laplace transform 2 LCs Uc s RCsU c s Uc s U s ( ) ( ) ( ) ( ) 3) Calculating the transfer function Gs () as Uc() s 1 Gs () 2 U( s) LCs RCs 1 51
52 Transfer function of typical components Component ODE TF it vt () () R v( t) Ri( t) G() s V() s Is () R vt () it () L v() t di() t L dt G() s V() s Is () sl vt () it () 1 t v( t) i( ) d C C 0 Gs () V( s) 1 I() s sc 52
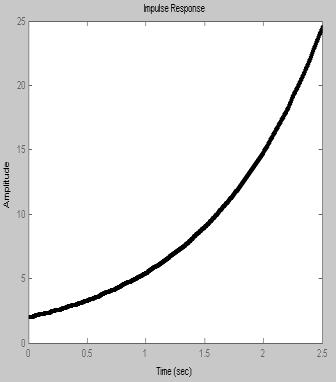
53 Properties of transfer function The transfer function is defined only for a linear time-invariant system, not for nonlinear system. All initial conditions of the system are set to zero. The transfer function is independent of the input of the system. The transfer function G(s) is the Laplace transform of the unit impulse response g(t). 53
54 How poles and zeros relate to system response Why we strive to obtain TF models? Why control engineers prefer to use TF model? How to use TF model to analyze and design control systems? we start from the relationship between the locations of zeros and poles of TF and the output responses of a system 54
55 Transfer function X() s s A a Time-domain impulse response x() t Ae at Position of poles and zeros j -a 0 i 0 55
 Ae sin( bt ) Position of poles and zeros j b -a 0 i")
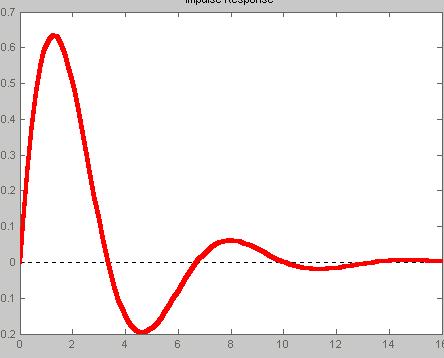
56 Transfer function X() s A s B ( s a) b Time-domain impulse response at x( t) Ae sin( bt ) Position of poles and zeros j b -a 0 i 0 56
 Asin( bt ) Position of poles and zeros j b 0 i 0")
57 Transfer function X() s A s B s b Time-domain impulse response x( t) Asin( bt ) Position of poles and zeros j b 0 i 0 57
58 Transfer function X() s A s a Time-domain impulse response x() t Ae at Position of poles and zeros j 0 -a i 58
 Ae sin( bt ) Position of poles and zeros -a b j 0 i")
59 Transfer function: X() s A s B ( s a) b Time-domain dynamic response at x( t) Ae sin( bt ) Position of poles and zeros -a b j 0 i 0 59



60 Summary of pole position & system dynamics 60
61 Characteristic equation -obtained by setting the denominator polynomial of the transfer function to zero n n1 s an 1s a1s a0 0 Note: stability of linear single-input, single-output systems is completely governed by the roots of the characteristic equation. 61
62 2-4 Block diagram and Signal-flow graph (SFG) 62
63 Block Diagrams In a block diagram all system variables are linked to each other through functional blocks The transfer functions of the components are usually entered in the corresponding blocks Blocks are connected by arrows to indicate the direction of the flow of signals Note: The dimension of the output signal from the block is the dimension of the input signal multiplied by the dimension of the transfer function in the block Element of a block diagram Feb-15 64
64 Block Diagrams(2) The advantage of the block diagram representation is the simplicity of forming the overall block diagram for the entire system by connecting the blocks of the components according to the signal flow A block diagram contains information concerning dynamic behavior, but it does not include any information on the physical construction of the system A number of different block diagrams can be drawn for a system Feb-15 65
65 Block Diagram Representation The transfer function relationship Y( s) G( s) U( s) can be graphically denoted through a block diagram. U(s) G(s) Y(s) Feb-15 66
66 Equivalent Transform of Block Diagram 1. Connection in series U(s) G 1 (s) X(s) G 2 (s) Y(s) U(s) G(s) Y(s) Gs ( )? Ys () G( s) G1( s) G2( s) Us () Feb-15 67
67 2. Connection in parallel U(s) G1(s) G2(s) Y1(s) Y2(s) Y(S) U(s) G(s) Y(s) Gs ( )? Ys () G( s) G1( s) G2( s) Us () Feb-15 68
68 3. Negative feedback R(s) U(s) _ Y ( s) U( s) G( s) U ( s) R( s) Y( s) H( s) G(s) Y(s) R(s) M(s) Y(s) H(s) Transfer function of a negative feedback system: Gs ( ) gain of the forward path M() s 1G( s) H( s) 1 gain of the loop Y( s) R( s) Y( s) H( s) G( s) Feb-15 69
69 Block Diagram Reduction Any number of cascaded blocks can be replaced by a single block, the transfer function of which is simply the product of the individual transfer functions Blocks can be connected in series only if the output of one block is not affected by the next following block (no feedback) A complicated block diagram involving many feedback loops can be simplified by a step-by-step rearrangement Simplification of the block diagram by rearrangements considerably reduces the labor needed for subsequent mathematical analysis Feb-15 72
70 Block Diagram Transformations Feb-15 73
71 Example Simplify this diagram Solution: By moving the summing point of the negative feedback loop containing H 2 outside the positive feedback loop containing H 1, we obtain Feb-15 74
72 Example (2) Eliminating the positive feedback loop The elimination of the loop containing H 2 /G 1 gives Finally, eliminating the feedback loop results in Feb-15 75
73 Example (3) Notice that the numerator of the closed-loop transfer function C(s)/R(s) is the product of the transfer functions of the feed-forward path. The denominator of C(s)/R(s) is equal to The positive feedback loop yields a negative term in the denominator Feb-15 76
74 Signal Flow Graph Feb-15 77
75 Signal Flow Graph (SFG) SFG was introduced by S.J. Mason for the cause-andeffect representation of linear systems. 1. Each signal is represented by a node. 2. Each transfer function is represented by a branch. U(s) G(s) Y(s) G(s) U(s) Y(s) R(s) _ U(s) G(s) Y(s) R(s) 1 U(s) G(s) Y(s) H(s) -H(s) Feb-15 78
76 Block Diagram and Signal-Flow Graph Ur () s - 1 I () s 1-1 sc R1 1 U () s 1 1 R 2 Uc I () s 2 sc 1 () s - 2 U () s I () s U () s I () s r 1 1 R1 1 sc 2 U () c s Note: A signal flow graph and a block diagram contain exactly the same information (there is no advantage to one over the other; there is only personal preference) sc R Feb-15 79
77 Mason s Rule N M k N Ys ( ) 1 M () s M k Us () k1 Total number of forward paths between output Y(s) and input U(s) Path gain of the k th forward path 1 (all individual loop gains) (gain products of all possible two loops that do not touch) (gain products of all possible three loo ps that do not touch) k Value of for that part of the block diagram that does not touch the k th forward path k Feb-15 80
78 Example 1 Find the transfer function for the following block diagram U(s) 1 + _ /s 1/s 1/s a1 b1 b2 b Y(s) + Solution: Forward path a2 Path gain 1 M1 1 ( b1)(1) s 1 1 M2 1 ( b2)(1) s s M3 1 ( b3)(1) s s s and the determinates are a1 a2 a s s s a3 Feb-15 89
79 Example 1 Find the transfer function for the following block diagram U(s) 1 + _ /s 1/s 1/s a1 b1 b2 b Y(s) + Solution: Y() s M() s U() s N k1 a2 a3 Applying Mason s rule, we find the transfer function to be M k k b s b s b s a s a s a Feb-15 90
80 Example 2 Find the transfer function for the following SFG H 4 Us () Solution: Forward path 1 H 5 H 1 Path gain M H H H 1256 M2 H4 Loop path Path gain l1 H1H5 343 l H H H H l3 H3H l4 H4H7H6H5 H 3 and the determinates are 1 l l l l ( l l ) H 7 1 HH Ys () Feb-15 91
81 Example 2 Find the transfer function for the following SFG H 4 Us () M() s 1 H 5 Y() s U() s H 1 Solution: Applying Mason s rule, we find the transfer function to be N k1 M k k H H H H H H H H H H H H H H H H H H H H H H H 2 H 3 H 7 1 Ys () Feb-15 92
MATHEMATICAL MODELING OF CONTROL SYSTEMS
 1 MATHEMATICAL MODELING OF CONTROL SYSTEMS Sep-14 Dr. Mohammed Morsy Outline Introduction Transfer function and impulse response function Laplace Transform Review Automatic control systems Signal Flow
1 MATHEMATICAL MODELING OF CONTROL SYSTEMS Sep-14 Dr. Mohammed Morsy Outline Introduction Transfer function and impulse response function Laplace Transform Review Automatic control systems Signal Flow
9.5 The Transfer Function
 Lecture Notes on Control Systems/D. Ghose/2012 0 9.5 The Transfer Function Consider the n-th order linear, time-invariant dynamical system. dy a 0 y + a 1 dt + a d 2 y 2 dt + + a d n y 2 n dt b du 0u +
Lecture Notes on Control Systems/D. Ghose/2012 0 9.5 The Transfer Function Consider the n-th order linear, time-invariant dynamical system. dy a 0 y + a 1 dt + a d 2 y 2 dt + + a d n y 2 n dt b du 0u +
Laplace Transforms Chapter 3
 Laplace Transforms Important analytical method for solving linear ordinary differential equations. - Application to nonlinear ODEs? Must linearize first. Laplace transforms play a key role in important
Laplace Transforms Important analytical method for solving linear ordinary differential equations. - Application to nonlinear ODEs? Must linearize first. Laplace transforms play a key role in important
I Laplace transform. I Transfer function. I Conversion between systems in time-, frequency-domain, and transfer
 EE C128 / ME C134 Feedback Control Systems Lecture Chapter 2 Modeling in the Frequency Domain Alexandre Bayen Department of Electrical Engineering & Computer Science University of California Berkeley Lecture
EE C128 / ME C134 Feedback Control Systems Lecture Chapter 2 Modeling in the Frequency Domain Alexandre Bayen Department of Electrical Engineering & Computer Science University of California Berkeley Lecture
Laplace Transforms. Chapter 3. Pierre Simon Laplace Born: 23 March 1749 in Beaumont-en-Auge, Normandy, France Died: 5 March 1827 in Paris, France
 Pierre Simon Laplace Born: 23 March 1749 in Beaumont-en-Auge, Normandy, France Died: 5 March 1827 in Paris, France Laplace Transforms Dr. M. A. A. Shoukat Choudhury 1 Laplace Transforms Important analytical
Pierre Simon Laplace Born: 23 March 1749 in Beaumont-en-Auge, Normandy, France Died: 5 March 1827 in Paris, France Laplace Transforms Dr. M. A. A. Shoukat Choudhury 1 Laplace Transforms Important analytical
Time Response of Systems
 Chapter 0 Time Response of Systems 0. Some Standard Time Responses Let us try to get some impulse time responses just by inspection: Poles F (s) f(t) s-plane Time response p =0 s p =0,p 2 =0 s 2 t p =
Chapter 0 Time Response of Systems 0. Some Standard Time Responses Let us try to get some impulse time responses just by inspection: Poles F (s) f(t) s-plane Time response p =0 s p =0,p 2 =0 s 2 t p =
Laplace Transforms and use in Automatic Control
 Laplace Transforms and use in Automatic Control P.S. Gandhi Mechanical Engineering IIT Bombay Acknowledgements: P.Santosh Krishna, SYSCON Recap Fourier series Fourier transform: aperiodic Convolution integral
Laplace Transforms and use in Automatic Control P.S. Gandhi Mechanical Engineering IIT Bombay Acknowledgements: P.Santosh Krishna, SYSCON Recap Fourier series Fourier transform: aperiodic Convolution integral
School of Engineering Faculty of Built Environment, Engineering, Technology & Design
 Module Name and Code : ENG60803 Real Time Instrumentation Semester and Year : Semester 5/6, Year 3 Lecture Number/ Week : Lecture 3, Week 3 Learning Outcome (s) : LO5 Module Co-ordinator/Tutor : Dr. Phang
Module Name and Code : ENG60803 Real Time Instrumentation Semester and Year : Semester 5/6, Year 3 Lecture Number/ Week : Lecture 3, Week 3 Learning Outcome (s) : LO5 Module Co-ordinator/Tutor : Dr. Phang
Chapter 6: The Laplace Transform. Chih-Wei Liu
 Chapter 6: The Laplace Transform Chih-Wei Liu Outline Introduction The Laplace Transform The Unilateral Laplace Transform Properties of the Unilateral Laplace Transform Inversion of the Unilateral Laplace
Chapter 6: The Laplace Transform Chih-Wei Liu Outline Introduction The Laplace Transform The Unilateral Laplace Transform Properties of the Unilateral Laplace Transform Inversion of the Unilateral Laplace
CHBE320 LECTURE V LAPLACE TRANSFORM AND TRANSFER FUNCTION. Professor Dae Ryook Yang
 CHBE320 LECTURE V LAPLACE TRANSFORM AND TRANSFER FUNCTION Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 5-1 Road Map of the Lecture V Laplace Transform and Transfer
CHBE320 LECTURE V LAPLACE TRANSFORM AND TRANSFER FUNCTION Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 5-1 Road Map of the Lecture V Laplace Transform and Transfer
Control System. Contents
 Contents Chapter Topic Page Chapter- Chapter- Chapter-3 Chapter-4 Introduction Transfer Function, Block Diagrams and Signal Flow Graphs Mathematical Modeling Control System 35 Time Response Analysis of
Contents Chapter Topic Page Chapter- Chapter- Chapter-3 Chapter-4 Introduction Transfer Function, Block Diagrams and Signal Flow Graphs Mathematical Modeling Control System 35 Time Response Analysis of
Course roadmap. ME451: Control Systems. Example of Laplace transform. Lecture 2 Laplace transform. Laplace transform
 ME45: Control Systems Lecture 2 Prof. Jongeun Choi Department of Mechanical Engineering Michigan State University Modeling Transfer function Models for systems electrical mechanical electromechanical Block
ME45: Control Systems Lecture 2 Prof. Jongeun Choi Department of Mechanical Engineering Michigan State University Modeling Transfer function Models for systems electrical mechanical electromechanical Block
( ) ( = ) = ( ) ( ) ( )
 ( = ) = ( ) ( ) ( )") ( ) Vρ C st s T t 0 wc Ti s T s Q s (8) K T ( s) Q ( s) + Ti ( s) (0) τs+ τs+ V ρ K and τ wc w T (s)g (s)q (s) + G (s)t(s) i G and G are transfer functions and independent of the inputs, Q and T i. Note
( ) Vρ C st s T t 0 wc Ti s T s Q s (8) K T ( s) Q ( s) + Ti ( s) (0) τs+ τs+ V ρ K and τ wc w T (s)g (s)q (s) + G (s)t(s) i G and G are transfer functions and independent of the inputs, Q and T i. Note
Linear Systems Theory
 ME 3253 Linear Systems Theory Review Class Overview and Introduction 1. How to build dynamic system model for physical system? 2. How to analyze the dynamic system? -- Time domain -- Frequency domain (Laplace
ME 3253 Linear Systems Theory Review Class Overview and Introduction 1. How to build dynamic system model for physical system? 2. How to analyze the dynamic system? -- Time domain -- Frequency domain (Laplace
Lecture 7: Laplace Transform and Its Applications Dr.-Ing. Sudchai Boonto
 Dr-Ing Sudchai Boonto Department of Control System and Instrumentation Engineering King Mongkut s Unniversity of Technology Thonburi Thailand Outline Motivation The Laplace Transform The Laplace Transform
Dr-Ing Sudchai Boonto Department of Control System and Instrumentation Engineering King Mongkut s Unniversity of Technology Thonburi Thailand Outline Motivation The Laplace Transform The Laplace Transform
ECEN 420 LINEAR CONTROL SYSTEMS. Lecture 6 Mathematical Representation of Physical Systems II 1/67
 1/67 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 6 Mathematical Representation of Physical Systems II State Variable Models for Dynamic Systems u 1 u 2 u ṙ. Internal Variables x 1, x 2 x n y 1 y 2. y m Figure
1/67 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 6 Mathematical Representation of Physical Systems II State Variable Models for Dynamic Systems u 1 u 2 u ṙ. Internal Variables x 1, x 2 x n y 1 y 2. y m Figure
Time Response Analysis (Part II)
") Time Response Analysis (Part II). A critically damped, continuous-time, second order system, when sampled, will have (in Z domain) (a) A simple pole (b) Double pole on real axis (c) Double pole on imaginary
Time Response Analysis (Part II). A critically damped, continuous-time, second order system, when sampled, will have (in Z domain) (a) A simple pole (b) Double pole on real axis (c) Double pole on imaginary
Raktim Bhattacharya. . AERO 632: Design of Advance Flight Control System. Preliminaries
 . AERO 632: of Advance Flight Control System. Preliminaries Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. Preliminaries Signals & Systems Laplace
. AERO 632: of Advance Flight Control System. Preliminaries Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. Preliminaries Signals & Systems Laplace
Laplace Transform Part 1: Introduction (I&N Chap 13)
") Laplace Transform Part 1: Introduction (I&N Chap 13) Definition of the L.T. L.T. of Singularity Functions L.T. Pairs Properties of the L.T. Inverse L.T. Convolution IVT(initial value theorem) & FVT (final
Laplace Transform Part 1: Introduction (I&N Chap 13) Definition of the L.T. L.T. of Singularity Functions L.T. Pairs Properties of the L.T. Inverse L.T. Convolution IVT(initial value theorem) & FVT (final
Control Systems. Laplace domain analysis
 Control Systems Laplace domain analysis L. Lanari outline introduce the Laplace unilateral transform define its properties show its advantages in turning ODEs to algebraic equations define an Input/Output
Control Systems Laplace domain analysis L. Lanari outline introduce the Laplace unilateral transform define its properties show its advantages in turning ODEs to algebraic equations define an Input/Output
Unit 2: Modeling in the Frequency Domain Part 2: The Laplace Transform. The Laplace Transform. The need for Laplace
 Unit : Modeling in the Frequency Domain Part : Engineering 81: Control Systems I Faculty of Engineering & Applied Science Memorial University of Newfoundland January 1, 010 1 Pair Table Unit, Part : Unit,
Unit : Modeling in the Frequency Domain Part : Engineering 81: Control Systems I Faculty of Engineering & Applied Science Memorial University of Newfoundland January 1, 010 1 Pair Table Unit, Part : Unit,
Introduction & Laplace Transforms Lectures 1 & 2
 Introduction & Lectures 1 & 2, Professor Department of Electrical and Computer Engineering Colorado State University Fall 2016 Control System Definition of a Control System Group of components that collectively
Introduction & Lectures 1 & 2, Professor Department of Electrical and Computer Engineering Colorado State University Fall 2016 Control System Definition of a Control System Group of components that collectively
Dr Ian R. Manchester
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Transform Solutions to LTI Systems Part 3
 Transform Solutions to LTI Systems Part 3 Example of second order system solution: Same example with increased damping: k=5 N/m, b=6 Ns/m, F=2 N, m=1 Kg Given x(0) = 0, x (0) = 0, find x(t). The revised
Transform Solutions to LTI Systems Part 3 Example of second order system solution: Same example with increased damping: k=5 N/m, b=6 Ns/m, F=2 N, m=1 Kg Given x(0) = 0, x (0) = 0, find x(t). The revised
20.6. Transfer Functions. Introduction. Prerequisites. Learning Outcomes
 Transfer Functions 2.6 Introduction In this Section we introduce the concept of a transfer function and then use this to obtain a Laplace transform model of a linear engineering system. (A linear engineering
Transfer Functions 2.6 Introduction In this Section we introduce the concept of a transfer function and then use this to obtain a Laplace transform model of a linear engineering system. (A linear engineering
AMJAD HASOON Process Control Lec4.
 Multiple Inputs Control systems often have more than one input. For example, there can be the input signal indicating the required value of the controlled variable and also an input or inputs due to disturbances
Multiple Inputs Control systems often have more than one input. For example, there can be the input signal indicating the required value of the controlled variable and also an input or inputs due to disturbances
STABILITY. Have looked at modeling dynamic systems using differential equations. and used the Laplace transform to help find step and impulse
 SIGNALS AND SYSTEMS: PAPER 3C1 HANDOUT 4. Dr David Corrigan 1. Electronic and Electrical Engineering Dept. corrigad@tcd.ie www.sigmedia.tv STABILITY Have looked at modeling dynamic systems using differential
SIGNALS AND SYSTEMS: PAPER 3C1 HANDOUT 4. Dr David Corrigan 1. Electronic and Electrical Engineering Dept. corrigad@tcd.ie www.sigmedia.tv STABILITY Have looked at modeling dynamic systems using differential
EE102 Homework 2, 3, and 4 Solutions
 EE12 Prof. S. Boyd EE12 Homework 2, 3, and 4 Solutions 7. Some convolution systems. Consider a convolution system, y(t) = + u(t τ)h(τ) dτ, where h is a function called the kernel or impulse response of
EE12 Prof. S. Boyd EE12 Homework 2, 3, and 4 Solutions 7. Some convolution systems. Consider a convolution system, y(t) = + u(t τ)h(τ) dτ, where h is a function called the kernel or impulse response of
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.6 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS
MIT OpenCourseWare http://ocw.mit.edu 2.6 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS
Module 03 Modeling of Dynamical Systems
 Module 03 Modeling of Dynamical Systems Ahmad F. Taha EE 3413: Analysis and Desgin of Control Systems Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha February 2, 2016 Ahmad F. Taha
Module 03 Modeling of Dynamical Systems Ahmad F. Taha EE 3413: Analysis and Desgin of Control Systems Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha February 2, 2016 Ahmad F. Taha
EE/ME/AE324: Dynamical Systems. Chapter 7: Transform Solutions of Linear Models
 EE/ME/AE324: Dynamical Systems Chapter 7: Transform Solutions of Linear Models The Laplace Transform Converts systems or signals from the real time domain, e.g., functions of the real variable t, to the
EE/ME/AE324: Dynamical Systems Chapter 7: Transform Solutions of Linear Models The Laplace Transform Converts systems or signals from the real time domain, e.g., functions of the real variable t, to the
e st f (t) dt = e st tf(t) dt = L {t f(t)} s
 dt = e st tf(t) dt = L {t f(t)} s") Additional operational properties How to find the Laplace transform of a function f (t) that is multiplied by a monomial t n, the transform of a special type of integral, and the transform of a periodic
Additional operational properties How to find the Laplace transform of a function f (t) that is multiplied by a monomial t n, the transform of a special type of integral, and the transform of a periodic
Dr. Ian R. Manchester
 Dr Ian R. Manchester Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus
Dr Ian R. Manchester Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus
An Introduction to Control Systems
 An Introduction to Control Systems Signals and Systems: 3C1 Control Systems Handout 1 Dr. David Corrigan Electronic and Electrical Engineering corrigad@tcd.ie November 21, 2012 Recall the concept of a
An Introduction to Control Systems Signals and Systems: 3C1 Control Systems Handout 1 Dr. David Corrigan Electronic and Electrical Engineering corrigad@tcd.ie November 21, 2012 Recall the concept of a
Analysis and Design of Control Systems in the Time Domain
 Chapter 6 Analysis and Design of Control Systems in the Time Domain 6. Concepts of feedback control Given a system, we can classify it as an open loop or a closed loop depends on the usage of the feedback.
Chapter 6 Analysis and Design of Control Systems in the Time Domain 6. Concepts of feedback control Given a system, we can classify it as an open loop or a closed loop depends on the usage of the feedback.
Introduction to Modern Control MT 2016
 CDT Autonomous and Intelligent Machines & Systems Introduction to Modern Control MT 2016 Alessandro Abate Lecture 2 First-order ordinary differential equations (ODE) Solution of a linear ODE Hints to nonlinear
CDT Autonomous and Intelligent Machines & Systems Introduction to Modern Control MT 2016 Alessandro Abate Lecture 2 First-order ordinary differential equations (ODE) Solution of a linear ODE Hints to nonlinear
Name: Solutions Final Exam
 Instructions. Answer each of the questions on your own paper. Put your name on each page of your paper. Be sure to show your work so that partial credit can be adequately assessed. Credit will not be given
Instructions. Answer each of the questions on your own paper. Put your name on each page of your paper. Be sure to show your work so that partial credit can be adequately assessed. Credit will not be given
Dr Ian R. Manchester Dr Ian R. Manchester AMME 3500 : Review
 Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Raktim Bhattacharya. . AERO 422: Active Controls for Aerospace Vehicles. Dynamic Response
 .. AERO 422: Active Controls for Aerospace Vehicles Dynamic Response Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. . Previous Class...........
.. AERO 422: Active Controls for Aerospace Vehicles Dynamic Response Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. . Previous Class...........
INC 341 Feedback Control Systems: Lecture 2 Transfer Function of Dynamic Systems I Asst. Prof. Dr.-Ing. Sudchai Boonto
 INC 341 Feedback Control Systems: Lecture 2 Transfer Function of Dynamic Systems I Asst. Prof. Dr.-Ing. Sudchai Boonto Department of Control Systems and Instrumentation Engineering King Mongkut s University
INC 341 Feedback Control Systems: Lecture 2 Transfer Function of Dynamic Systems I Asst. Prof. Dr.-Ing. Sudchai Boonto Department of Control Systems and Instrumentation Engineering King Mongkut s University
Control Systems I. Lecture 6: Poles and Zeros. Readings: Emilio Frazzoli. Institute for Dynamic Systems and Control D-MAVT ETH Zürich
 Control Systems I Lecture 6: Poles and Zeros Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 27, 2017 E. Frazzoli (ETH) Lecture 6: Control Systems I 27/10/2017
Control Systems I Lecture 6: Poles and Zeros Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 27, 2017 E. Frazzoli (ETH) Lecture 6: Control Systems I 27/10/2017
Control Systems Engineering (Chapter 2. Modeling in the Frequency Domain) Prof. Kwang-Chun Ho Tel: Fax:
 Prof. Kwang-Chun Ho Tel: Fax:") Control Systems Engineering (Chapter 2. Modeling in the Frequency Domain) Prof. Kwang-Chun Ho kwangho@hansung.ac.kr Tel: 02-760-4253 Fax:02-760-4435 Overview Review on Laplace transform Learn about transfer
Control Systems Engineering (Chapter 2. Modeling in the Frequency Domain) Prof. Kwang-Chun Ho kwangho@hansung.ac.kr Tel: 02-760-4253 Fax:02-760-4435 Overview Review on Laplace transform Learn about transfer
Linear Control Systems Solution to Assignment #1
 Linear Control Systems Solution to Assignment # Instructor: H. Karimi Issued: Mehr 0, 389 Due: Mehr 8, 389 Solution to Exercise. a) Using the superposition property of linear systems we can compute the
Linear Control Systems Solution to Assignment # Instructor: H. Karimi Issued: Mehr 0, 389 Due: Mehr 8, 389 Solution to Exercise. a) Using the superposition property of linear systems we can compute the
ECEN 420 LINEAR CONTROL SYSTEMS. Lecture 2 Laplace Transform I 1/52
 1/52 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 2 Laplace Transform I Linear Time Invariant Systems A general LTI system may be described by the linear constant coefficient differential equation: a n d n
1/52 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 2 Laplace Transform I Linear Time Invariant Systems A general LTI system may be described by the linear constant coefficient differential equation: a n d n
Control Systems. Frequency domain analysis. L. Lanari
 Control Systems m i l e r p r a in r e v y n is o Frequency domain analysis L. Lanari outline introduce the Laplace unilateral transform define its properties show its advantages in turning ODEs to algebraic
Control Systems m i l e r p r a in r e v y n is o Frequency domain analysis L. Lanari outline introduce the Laplace unilateral transform define its properties show its advantages in turning ODEs to algebraic
Basic Procedures for Common Problems
 Basic Procedures for Common Problems ECHE 550, Fall 2002 Steady State Multivariable Modeling and Control 1 Determine what variables are available to manipulate (inputs, u) and what variables are available
Basic Procedures for Common Problems ECHE 550, Fall 2002 Steady State Multivariable Modeling and Control 1 Determine what variables are available to manipulate (inputs, u) and what variables are available
ENGIN 211, Engineering Math. Laplace Transforms
 ENGIN 211, Engineering Math Laplace Transforms 1 Why Laplace Transform? Laplace transform converts a function in the time domain to its frequency domain. It is a powerful, systematic method in solving
ENGIN 211, Engineering Math Laplace Transforms 1 Why Laplace Transform? Laplace transform converts a function in the time domain to its frequency domain. It is a powerful, systematic method in solving
8 sin 3 V. For the circuit given, determine the voltage v for all time t. Assume that no energy is stored in the circuit before t = 0.
 For the circuit given, determine the voltage v for all time t. Assume that no energy is stored in the circuit before t = 0. Spring 2015, Exam #5, Problem #1 4t Answer: e tut 8 sin 3 V 1 For the circuit
For the circuit given, determine the voltage v for all time t. Assume that no energy is stored in the circuit before t = 0. Spring 2015, Exam #5, Problem #1 4t Answer: e tut 8 sin 3 V 1 For the circuit
The Laplace Transform
 C H A P T E R 6 The Laplace Transform Many practical engineering problems involve mechanical or electrical systems acted on by discontinuous or impulsive forcing terms. For such problems the methods described
C H A P T E R 6 The Laplace Transform Many practical engineering problems involve mechanical or electrical systems acted on by discontinuous or impulsive forcing terms. For such problems the methods described
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 3 Signals & Systems Prof. Mark Fowler Note Set #9 C-T Systems: Laplace Transform Transfer Function Reading Assignment: Section 6.5 of Kamen and Heck /7 Course Flow Diagram The arrows here show conceptual
EECE 3 Signals & Systems Prof. Mark Fowler Note Set #9 C-T Systems: Laplace Transform Transfer Function Reading Assignment: Section 6.5 of Kamen and Heck /7 Course Flow Diagram The arrows here show conceptual
Laplace Transform Analysis of Signals and Systems
 Laplace Transform Analysis of Signals and Systems Transfer Functions Transfer functions of CT systems can be found from analysis of Differential Equations Block Diagrams Circuit Diagrams 5/10/04 M. J.
Laplace Transform Analysis of Signals and Systems Transfer Functions Transfer functions of CT systems can be found from analysis of Differential Equations Block Diagrams Circuit Diagrams 5/10/04 M. J.
Lecture 4 Stabilization
 Lecture 4 Stabilization This lecture follows Chapter 5 of Doyle-Francis-Tannenbaum, with proofs and Section 5.3 omitted 17013 IOC-UPC, Lecture 4, November 2nd 2005 p. 1/23 Stable plants (I) We assume that
Lecture 4 Stabilization This lecture follows Chapter 5 of Doyle-Francis-Tannenbaum, with proofs and Section 5.3 omitted 17013 IOC-UPC, Lecture 4, November 2nd 2005 p. 1/23 Stable plants (I) We assume that
Solving a RLC Circuit using Convolution with DERIVE for Windows
 Solving a RLC Circuit using Convolution with DERIVE for Windows Michel Beaudin École de technologie supérieure, rue Notre-Dame Ouest Montréal (Québec) Canada, H3C K3 mbeaudin@seg.etsmtl.ca - Introduction
Solving a RLC Circuit using Convolution with DERIVE for Windows Michel Beaudin École de technologie supérieure, rue Notre-Dame Ouest Montréal (Québec) Canada, H3C K3 mbeaudin@seg.etsmtl.ca - Introduction
EE Control Systems LECTURE 9
 Updated: Sunday, February, 999 EE - Control Systems LECTURE 9 Copyright FL Lewis 998 All rights reserved STABILITY OF LINEAR SYSTEMS We discuss the stability of input/output systems and of state-space
Updated: Sunday, February, 999 EE - Control Systems LECTURE 9 Copyright FL Lewis 998 All rights reserved STABILITY OF LINEAR SYSTEMS We discuss the stability of input/output systems and of state-space
Lecture 5: Linear Systems. Transfer functions. Frequency Domain Analysis. Basic Control Design.
 ISS0031 Modeling and Identification Lecture 5: Linear Systems. Transfer functions. Frequency Domain Analysis. Basic Control Design. Aleksei Tepljakov, Ph.D. September 30, 2015 Linear Dynamic Systems Definition
ISS0031 Modeling and Identification Lecture 5: Linear Systems. Transfer functions. Frequency Domain Analysis. Basic Control Design. Aleksei Tepljakov, Ph.D. September 30, 2015 Linear Dynamic Systems Definition
GATE EE Topic wise Questions SIGNALS & SYSTEMS
 www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
Introduction to Controls
 EE 474 Review Exam 1 Name Answer each of the questions. Show your work. Note were essay-type answers are requested. Answer with complete sentences. Incomplete sentences will count heavily against the grade.
EE 474 Review Exam 1 Name Answer each of the questions. Show your work. Note were essay-type answers are requested. Answer with complete sentences. Incomplete sentences will count heavily against the grade.
Review: control, feedback, etc. Today s topic: state-space models of systems; linearization
 Plan of the Lecture Review: control, feedback, etc Today s topic: state-space models of systems; linearization Goal: a general framework that encompasses all examples of interest Once we have mastered
Plan of the Lecture Review: control, feedback, etc Today s topic: state-space models of systems; linearization Goal: a general framework that encompasses all examples of interest Once we have mastered
Advanced Analog Building Blocks. Prof. Dr. Peter Fischer, Dr. Wei Shen, Dr. Albert Comerma, Dr. Johannes Schemmel, etc
 Advanced Analog Building Blocks Prof. Dr. Peter Fischer, Dr. Wei Shen, Dr. Albert Comerma, Dr. Johannes Schemmel, etc 1 Topics 1. S domain and Laplace Transform Zeros and Poles 2. Basic and Advanced current
Advanced Analog Building Blocks Prof. Dr. Peter Fischer, Dr. Wei Shen, Dr. Albert Comerma, Dr. Johannes Schemmel, etc 1 Topics 1. S domain and Laplace Transform Zeros and Poles 2. Basic and Advanced current
(Refer Slide Time: 00:01:30 min)
") Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
SECTION 2: BLOCK DIAGRAMS & SIGNAL FLOW GRAPHS
 SECTION 2: BLOCK DIAGRAMS & SIGNAL FLOW GRAPHS MAE 4421 Control of Aerospace & Mechanical Systems 2 Block Diagram Manipulation Block Diagrams 3 In the introductory section we saw examples of block diagrams
SECTION 2: BLOCK DIAGRAMS & SIGNAL FLOW GRAPHS MAE 4421 Control of Aerospace & Mechanical Systems 2 Block Diagram Manipulation Block Diagrams 3 In the introductory section we saw examples of block diagrams
CHAPTER 1 Basic Concepts of Control System. CHAPTER 6 Hydraulic Control System
 CHAPTER 1 Basic Concepts of Control System 1. What is open loop control systems and closed loop control systems? Compare open loop control system with closed loop control system. Write down major advantages
CHAPTER 1 Basic Concepts of Control System 1. What is open loop control systems and closed loop control systems? Compare open loop control system with closed loop control system. Write down major advantages
Module 02 Control Systems Preliminaries, Intro to State Space
 Module 02 Control Systems Preliminaries, Intro to State Space Ahmad F. Taha EE 5143: Linear Systems and Control Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha August 28, 2017 Ahmad
Module 02 Control Systems Preliminaries, Intro to State Space Ahmad F. Taha EE 5143: Linear Systems and Control Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha August 28, 2017 Ahmad
EE Experiment 11 The Laplace Transform and Control System Characteristics
 EE216:11 1 EE 216 - Experiment 11 The Laplace Transform and Control System Characteristics Objectives: To illustrate computer usage in determining inverse Laplace transforms. Also to determine useful signal
EE216:11 1 EE 216 - Experiment 11 The Laplace Transform and Control System Characteristics Objectives: To illustrate computer usage in determining inverse Laplace transforms. Also to determine useful signal
Introduction to Process Control
 Introduction to Process Control For more visit :- www.mpgirnari.in By: M. P. Girnari (SSEC, Bhavnagar) For more visit:- www.mpgirnari.in 1 Contents: Introduction Process control Dynamics Stability The
Introduction to Process Control For more visit :- www.mpgirnari.in By: M. P. Girnari (SSEC, Bhavnagar) For more visit:- www.mpgirnari.in 1 Contents: Introduction Process control Dynamics Stability The
ELG 3150 Introduction to Control Systems. TA: Fouad Khalil, P.Eng., Ph.D. Student
 ELG 350 Introduction to Control Systems TA: Fouad Khalil, P.Eng., Ph.D. Student fkhalil@site.uottawa.ca My agenda for this tutorial session I will introduce the Laplace Transforms as a useful tool for
ELG 350 Introduction to Control Systems TA: Fouad Khalil, P.Eng., Ph.D. Student fkhalil@site.uottawa.ca My agenda for this tutorial session I will introduce the Laplace Transforms as a useful tool for
MEM 255 Introduction to Control Systems: Modeling & analyzing systems
 MEM 55 Introduction to Control Systems: Modeling & analyzing systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline The Pendulum Micro-machined capacitive accelerometer
MEM 55 Introduction to Control Systems: Modeling & analyzing systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline The Pendulum Micro-machined capacitive accelerometer
Last week: analysis of pinion-rack w velocity feedback
 Last week: analysis of pinion-rack w velocity feedback Calculation of the steady state error Transfer function: V (s) V ref (s) = 0.362K s +2+0.362K Step input: V ref (s) = s Output: V (s) = s 0.362K s
Last week: analysis of pinion-rack w velocity feedback Calculation of the steady state error Transfer function: V (s) V ref (s) = 0.362K s +2+0.362K Step input: V ref (s) = s Output: V (s) = s 0.362K s
06/12/ rws/jMc- modif SuFY10 (MPF) - Textbook Section IX 1
 - Textbook Section IX 1") IV. Continuous-Time Signals & LTI Systems [p. 3] Analog signal definition [p. 4] Periodic signal [p. 5] One-sided signal [p. 6] Finite length signal [p. 7] Impulse function [p. 9] Sampling property [p.11]
IV. Continuous-Time Signals & LTI Systems [p. 3] Analog signal definition [p. 4] Periodic signal [p. 5] One-sided signal [p. 6] Finite length signal [p. 7] Impulse function [p. 9] Sampling property [p.11]
Problem Weight Score Total 100
 EE 350 EXAM IV 15 December 2010 Last Name (Print): First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO DO SO Problem Weight Score 1 25 2 25 3 25 4 25 Total
EE 350 EXAM IV 15 December 2010 Last Name (Print): First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO DO SO Problem Weight Score 1 25 2 25 3 25 4 25 Total
(a) Torsional spring-mass system. (b) Spring element.
 Torsional spring-mass system. (b) Spring element.") m v s T s v a (a) T a (b) T a FIGURE 2.1 (a) Torsional spring-mass system. (b) Spring element. by ky Wall friction, b Mass M k y M y r(t) Force r(t) (a) (b) FIGURE 2.2 (a) Spring-mass-damper system. (b)
m v s T s v a (a) T a (b) T a FIGURE 2.1 (a) Torsional spring-mass system. (b) Spring element. by ky Wall friction, b Mass M k y M y r(t) Force r(t) (a) (b) FIGURE 2.2 (a) Spring-mass-damper system. (b)
f(t)e st dt. (4.1) Note that the integral defining the Laplace transform converges for s s 0 provided f(t) Ke s 0t for some constant K.
e st dt. (4.1) Note that the integral defining the Laplace transform converges for s s 0 provided f(t) Ke s 0t for some constant K.") 4 Laplace transforms 4. Definition and basic properties The Laplace transform is a useful tool for solving differential equations, in particular initial value problems. It also provides an example of integral
4 Laplace transforms 4. Definition and basic properties The Laplace transform is a useful tool for solving differential equations, in particular initial value problems. It also provides an example of integral
Alireza Mousavi Brunel University
 Alireza Mousavi Brunel University 1 » Control Process» Control Systems Design & Analysis 2 Open-Loop Control: Is normally a simple switch on and switch off process, for example a light in a room is switched
Alireza Mousavi Brunel University 1 » Control Process» Control Systems Design & Analysis 2 Open-Loop Control: Is normally a simple switch on and switch off process, for example a light in a room is switched
Course Background. Loosely speaking, control is the process of getting something to do what you want it to do (or not do, as the case may be).
.") ECE4520/5520: Multivariable Control Systems I. 1 1 Course Background 1.1: From time to frequency domain Loosely speaking, control is the process of getting something to do what you want it to do (or not
ECE4520/5520: Multivariable Control Systems I. 1 1 Course Background 1.1: From time to frequency domain Loosely speaking, control is the process of getting something to do what you want it to do (or not
Solutions of Spring 2008 Final Exam
 Solutions of Spring 008 Final Exam 1. (a) The isocline for slope 0 is the pair of straight lines y = ±x. The direction field along these lines is flat. The isocline for slope is the hyperbola on the left
Solutions of Spring 008 Final Exam 1. (a) The isocline for slope 0 is the pair of straight lines y = ±x. The direction field along these lines is flat. The isocline for slope is the hyperbola on the left
Radar Dish. Armature controlled dc motor. Inside. θ r input. Outside. θ D output. θ m. Gearbox. Control Transmitter. Control. θ D.
 Radar Dish ME 304 CONTROL SYSTEMS Mechanical Engineering Department, Middle East Technical University Armature controlled dc motor Outside θ D output Inside θ r input r θ m Gearbox Control Transmitter
Radar Dish ME 304 CONTROL SYSTEMS Mechanical Engineering Department, Middle East Technical University Armature controlled dc motor Outside θ D output Inside θ r input r θ m Gearbox Control Transmitter
ECE557 Systems Control
 ECE557 Systems Control Bruce Francis Course notes, Version.0, September 008 Preface This is the second Engineering Science course on control. It assumes ECE56 as a prerequisite. If you didn t take ECE56,
ECE557 Systems Control Bruce Francis Course notes, Version.0, September 008 Preface This is the second Engineering Science course on control. It assumes ECE56 as a prerequisite. If you didn t take ECE56,
Mathematical Models. MATH 365 Ordinary Differential Equations. J. Robert Buchanan. Spring Department of Mathematics
 Mathematical Models MATH 365 Ordinary Differential Equations J. Robert Buchanan Department of Mathematics Spring 2018 Ordinary Differential Equations The topic of ordinary differential equations (ODEs)
Mathematical Models MATH 365 Ordinary Differential Equations J. Robert Buchanan Department of Mathematics Spring 2018 Ordinary Differential Equations The topic of ordinary differential equations (ODEs)
Mathematical Models. MATH 365 Ordinary Differential Equations. J. Robert Buchanan. Fall Department of Mathematics
 Mathematical Models MATH 365 Ordinary Differential Equations J. Robert Buchanan Department of Mathematics Fall 2018 Ordinary Differential Equations The topic of ordinary differential equations (ODEs) is
Mathematical Models MATH 365 Ordinary Differential Equations J. Robert Buchanan Department of Mathematics Fall 2018 Ordinary Differential Equations The topic of ordinary differential equations (ODEs) is
Honors Differential Equations
 MIT OpenCourseWare http://ocw.mit.edu 8.034 Honors Differential Equations Spring 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. LECTURE 20. TRANSFORM
MIT OpenCourseWare http://ocw.mit.edu 8.034 Honors Differential Equations Spring 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. LECTURE 20. TRANSFORM
Video 5.1 Vijay Kumar and Ani Hsieh
 Video 5.1 Vijay Kumar and Ani Hsieh Robo3x-1.1 1 The Purpose of Control Input/Stimulus/ Disturbance System or Plant Output/ Response Understand the Black Box Evaluate the Performance Change the Behavior
Video 5.1 Vijay Kumar and Ani Hsieh Robo3x-1.1 1 The Purpose of Control Input/Stimulus/ Disturbance System or Plant Output/ Response Understand the Black Box Evaluate the Performance Change the Behavior
Modeling and Control Overview
 Modeling and Control Overview D R. T A R E K A. T U T U N J I A D V A N C E D C O N T R O L S Y S T E M S M E C H A T R O N I C S E N G I N E E R I N G D E P A R T M E N T P H I L A D E L P H I A U N I
Modeling and Control Overview D R. T A R E K A. T U T U N J I A D V A N C E D C O N T R O L S Y S T E M S M E C H A T R O N I C S E N G I N E E R I N G D E P A R T M E N T P H I L A D E L P H I A U N I
Analog Signals and Systems and their properties
 Analog Signals and Systems and their properties Main Course Objective: Recall course objectives Understand the fundamentals of systems/signals interaction (know how systems can transform or filter signals)
Analog Signals and Systems and their properties Main Course Objective: Recall course objectives Understand the fundamentals of systems/signals interaction (know how systems can transform or filter signals)
Professor Fearing EE C128 / ME C134 Problem Set 7 Solution Fall 2010 Jansen Sheng and Wenjie Chen, UC Berkeley
 Professor Fearing EE C8 / ME C34 Problem Set 7 Solution Fall Jansen Sheng and Wenjie Chen, UC Berkeley. 35 pts Lag compensation. For open loop plant Gs ss+5s+8 a Find compensator gain Ds k such that the
Professor Fearing EE C8 / ME C34 Problem Set 7 Solution Fall Jansen Sheng and Wenjie Chen, UC Berkeley. 35 pts Lag compensation. For open loop plant Gs ss+5s+8 a Find compensator gain Ds k such that the
Review of Linear Time-Invariant Network Analysis
 D1 APPENDIX D Review of Linear Time-Invariant Network Analysis Consider a network with input x(t) and output y(t) as shown in Figure D-1. If an input x 1 (t) produces an output y 1 (t), and an input x
D1 APPENDIX D Review of Linear Time-Invariant Network Analysis Consider a network with input x(t) and output y(t) as shown in Figure D-1. If an input x 1 (t) produces an output y 1 (t), and an input x
System Modeling. Lecture-2. Emam Fathy Department of Electrical and Control Engineering
 System Modeling Lecture-2 Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 Types of Systems Static System: If a system does not change with time, it is called a static
System Modeling Lecture-2 Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 Types of Systems Static System: If a system does not change with time, it is called a static
Math 3313: Differential Equations Laplace transforms
 Math 3313: Differential Equations Laplace transforms Thomas W. Carr Department of Mathematics Southern Methodist University Dallas, TX Outline Introduction Inverse Laplace transform Solving ODEs with Laplace
Math 3313: Differential Equations Laplace transforms Thomas W. Carr Department of Mathematics Southern Methodist University Dallas, TX Outline Introduction Inverse Laplace transform Solving ODEs with Laplace
Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
 Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 7 Modeling Modeling is the process of representing the behavior of a real
Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 7 Modeling Modeling is the process of representing the behavior of a real
ENGI 9420 Lecture Notes 1 - ODEs Page 1.01
 ENGI 940 Lecture Notes - ODEs Page.0. Ordinary Differential Equations An equation involving a function of one independent variable and the derivative(s) of that function is an ordinary differential equation
ENGI 940 Lecture Notes - ODEs Page.0. Ordinary Differential Equations An equation involving a function of one independent variable and the derivative(s) of that function is an ordinary differential equation
ET3-7: Modelling II(V) Electrical, Mechanical and Thermal Systems
 Electrical, Mechanical and Thermal Systems") ET3-7: Modelling II(V) Electrical, Mechanical and Thermal Systems Agenda of the Day 1. Resume of lesson I 2. Basic system models. 3. Models of basic electrical system elements 4. Application of Matlab/Simulink
ET3-7: Modelling II(V) Electrical, Mechanical and Thermal Systems Agenda of the Day 1. Resume of lesson I 2. Basic system models. 3. Models of basic electrical system elements 4. Application of Matlab/Simulink
School of Mechanical Engineering Purdue University. ME375 Dynamic Response - 1
 Dynamic Response of Linear Systems Linear System Response Superposition Principle Responses to Specific Inputs Dynamic Response of f1 1st to Order Systems Characteristic Equation - Free Response Stable
Dynamic Response of Linear Systems Linear System Response Superposition Principle Responses to Specific Inputs Dynamic Response of f1 1st to Order Systems Characteristic Equation - Free Response Stable
Definition of the Laplace transform. 0 x(t)e st dt
e st dt") Definition of the Laplace transform Bilateral Laplace Transform: X(s) = x(t)e st dt Unilateral (or one-sided) Laplace Transform: X(s) = 0 x(t)e st dt ECE352 1 Definition of the Laplace transform (cont.)
Definition of the Laplace transform Bilateral Laplace Transform: X(s) = x(t)e st dt Unilateral (or one-sided) Laplace Transform: X(s) = 0 x(t)e st dt ECE352 1 Definition of the Laplace transform (cont.)
The Method of Laplace Transforms.
 The Method of Laplace Transforms. James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University May 25, 217 Outline 1 The Laplace Transform 2 Inverting
The Method of Laplace Transforms. James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University May 25, 217 Outline 1 The Laplace Transform 2 Inverting
Dynamic Response. Assoc. Prof. Enver Tatlicioglu. Department of Electrical & Electronics Engineering Izmir Institute of Technology.
 Dynamic Response Assoc. Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 3 Assoc. Prof. Enver Tatlicioglu (EEE@IYTE) EE362 Feedback Control
Dynamic Response Assoc. Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 3 Assoc. Prof. Enver Tatlicioglu (EEE@IYTE) EE362 Feedback Control
Chapter 3: Block Diagrams and Signal Flow Graphs
 Chapter 3: Block Diagrams and Signal Flow Graphs Farid Golnaraghi, Simon Fraser University Benjamin C. Kuo, University of Illinois ISBN: 978 0 470 04896 2 Introduction In this chapter, we discuss graphical
Chapter 3: Block Diagrams and Signal Flow Graphs Farid Golnaraghi, Simon Fraser University Benjamin C. Kuo, University of Illinois ISBN: 978 0 470 04896 2 Introduction In this chapter, we discuss graphical
Module 4. Related web links and videos. 1. FT and ZT
 Module 4 Laplace transforms, ROC, rational systems, Z transform, properties of LT and ZT, rational functions, system properties from ROC, inverse transforms Related web links and videos Sl no Web link
Module 4 Laplace transforms, ROC, rational systems, Z transform, properties of LT and ZT, rational functions, system properties from ROC, inverse transforms Related web links and videos Sl no Web link
LTI Systems (Continuous & Discrete) - Basics
 - Basics") LTI Systems (Continuous & Discrete) - Basics 1. A system with an input x(t) and output y(t) is described by the relation: y(t) = t. x(t). This system is (a) linear and time-invariant (b) linear and time-varying
LTI Systems (Continuous & Discrete) - Basics 1. A system with an input x(t) and output y(t) is described by the relation: y(t) = t. x(t). This system is (a) linear and time-invariant (b) linear and time-varying
Control Systems. System response. L. Lanari
 Control Systems m i l e r p r a in r e v y n is o System response L. Lanari Outline What we are going to see: how to compute in the s-domain the forced response (zero-state response) using the transfer
Control Systems m i l e r p r a in r e v y n is o System response L. Lanari Outline What we are going to see: how to compute in the s-domain the forced response (zero-state response) using the transfer
Systems Engineering/Process Control L4
 1 / 24 Systems Engineering/Process Control L4 Input-output models Laplace transform Transfer functions Block diagram algebra Reading: Systems Engineering and Process Control: 4.1 4.4 2 / 24 Laplace transform
1 / 24 Systems Engineering/Process Control L4 Input-output models Laplace transform Transfer functions Block diagram algebra Reading: Systems Engineering and Process Control: 4.1 4.4 2 / 24 Laplace transform
University of Alberta ENGM 541: Modeling and Simulation of Engineering Systems Laboratory #7. M.G. Lipsett & M. Mashkournia 2011
 ENG M 54 Laboratory #7 University of Alberta ENGM 54: Modeling and Simulation of Engineering Systems Laboratory #7 M.G. Lipsett & M. Mashkournia 2 Mixed Systems Modeling with MATLAB & SIMULINK Mixed systems
ENG M 54 Laboratory #7 University of Alberta ENGM 54: Modeling and Simulation of Engineering Systems Laboratory #7 M.G. Lipsett & M. Mashkournia 2 Mixed Systems Modeling with MATLAB & SIMULINK Mixed systems