CSE 167: Lecture 11: Bézier Curves. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012
|
|
|
- Marian Robbins
- 5 years ago
- Views:
Transcription
1 CSE 167: Introduction to Computer Graphics Lecture 11: Bézier Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012
2 Announcements Homework project #5 due Nov. 9 th at 1:30pm To be presented in lab 260 Veterans Day: reschedule homework introduction Friday at 3:30pm? Tuesday before or after class? In Winter: CSE 190: 3D User Interaction 4 Units 2 lectures (Mon/Wed 11am-12:20pm) Programming assignments for 3D input devices 2
3 Lecture Overview Polynomial Curves Introduction Polynomial functions Bézier Curves Introduction Drawing Bézier curves Piecewise Bézier curves 3


")

4 Modeling Creating 3D objects How to construct complex surfaces? Goal Specify objects with control points Objects should be visually pleasing (smooth) Start with curves, then generalize to surfaces Next: What can curves be used for? 4
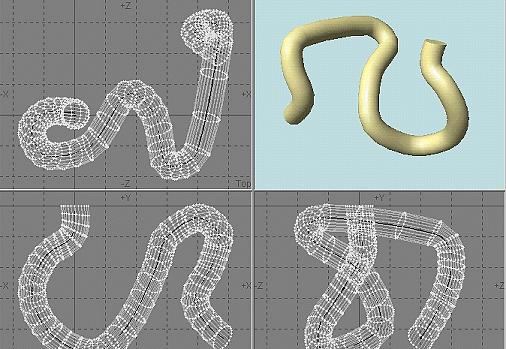
5 Curves Surface of revolution 5
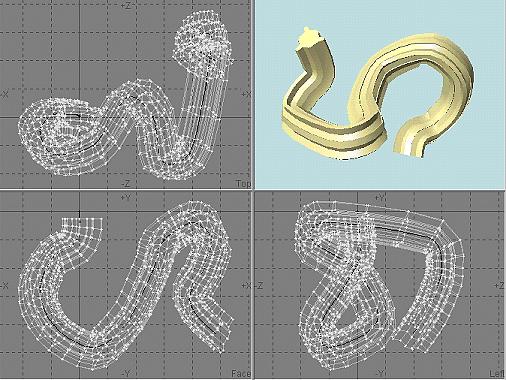
6 Curves Extruded/swept surfaces 6
7 Curves Animation Provide a track for objects Use as camera path 7


8 Curves Specify parameter values over time 8


9 Curves Can be generalized to surface patches 9
10 Curve Representation Specify many points along a curve, connect with lines? Difficult to get precise, smooth results across magnification levels Large storage and CPU requirements How many points are enough? Specify a curve using a small number of control points Known as a spline curve or just spline Control point 10
11 Spline: Definition Wikipedia: Term comes from flexible spline devices used by shipbuilders and draftsmen to draw smooth shapes. Spline consists of a long strip fixed in position at a number of points that relaxes to form a smooth curve passing through those points. 11
12 Interpolating Control Points Interpolating means that curve goes through all control points Seems most intuitive Surprisingly, not usually the best choice Hard to predict behavior Hard to get aesthetically pleasing curves 12
13 Approximating Control Points Curve is influenced by control points Various types Most common: polynomial functions Bézier spline (our main focus) B-spline (generalization of Bézier spline) NURBS (Non Uniform Rational Basis Spline): used in CAD tools 13
14 Mathematical Definition A vector valued function of one variable x(t) Given t, compute a 3D point x=(x,y,z) Could be interpreted as three functions: x(t), y(t), z(t) Parameter t moves a point along the curve x(t) z y x(0.0) x(0.5) x(1.0) x 14
15 Tangent Vector Derivative Vector x points in direction of movement Length corresponds to speed x(t) z y x (0.0) x (0.5) x (1.0) 15 x
16 Lecture Overview Polynomial Curves Introduction Polynomial functions Bézier Curves Introduction Drawing Bézier curves Piecewise Bézier curves 16
17 Polynomial Functions Linear: (1 st order) Quadratic: (2 nd order) Cubic: (3 rd order) 17
18 Polynomial Curves Linear Evaluated as: 18
19 Polynomial Curves Quadratic: (2 nd order) Cubic: (3 rd order) We usually define the curve for 0 t 1 19
20 Control Points Polynomial coefficients a, b, c, d can be interpreted as control points Remember: a, b, c, d have x,y,z components each Unfortunately, they do not intuitively describe the shape of the curve Goal: intuitive control points 20
21 Control Points How many control points? Two points define a line (1 st order) Three points define a quadratic curve (2 nd order) Four points define a cubic curve (3 rd order) k+1 points define a k-order curve Let s start with a line 21
22 First Order Curve Based on linear interpolation (LERP) Weighted average between two values Value could be a number, vector, color, Interpolate between points p 0 and p 1 with parameter t Defines a curve that is straight (first-order spline) t=0 corresponds to p 0 t=1 corresponds to p 1 t=0.5 corresponds to midpoint 22 p 0. 0<t<1 t=0. p 1 t=1 x(t) = Lerp( t, p 0, p 1 )= ( 1 t)p 0 + t p 1
23 Linear Interpolation Three equivalent ways to write it Expose different properties 1. Regroup for points p 2. Regroup for t 3. Matrix form 23
24 Weighted Average x(t) = (1 t)p 0 + (t)p 1 = B 0 (t) p 0 + B 1 (t)p 1, where B 0 (t) = 1 t and B 1 (t) = t Weights are a function of t Sum is always 1, for any value of t Also known as blending functions 24
25 Linear Polynomial x(t) = (p p 0 ) t + p vector point Curve is based at point p 0 Add the vector, scaled by t p 0..5(p 1 -p 0 ). p 1 -p 0. 25
26 Matrix Form Geometry matrix Geometric basis Polynomial basis In components 26
27 Tangent For a straight line, the tangent is constant Weighted average Polynomial Matrix form 27
28 Lecture Overview Polynomial Curves Introduction Polynomial functions Bézier Curves Introduction Drawing Bézier curves Piecewise Bézier curves 28
29 Bézier Curves Are a higher order extension of linear interpolation p 1 p 1 p 1 p 2 p 1 p 3 p 0 p 0 p 0 p 2 Linear Quadratic Cubic 29
30 Bézier Curves Give intuitive control over curve with control points Endpoints are interpolated, intermediate points are approximated Convex Hull property Variation-Diminishing property Many demo applets online, for example: Demo: ezier/bezier.html 30
31 Cubic Bézier Curve Most commonly used case Defined by four control points: Two interpolated endpoints (points are on the curve) Two points control the tangents at the endpoints Points x on curve defined as function of parameter t p 0 x(t) p 1 p 2 31 p 3
32 Algorithmic Construction Algorithmic construction De Casteljau algorithm, developed at Citroen in 1959, named after its inventor Paul de Casteljau (pronounced Cast-all- Joe ) Developed independently from Bézier s work: Bézier created the formulation using blending functions, Casteljau devised the recursive interpolation algorithm 32
33 De Casteljau Algorithm A recursive series of linear interpolations Works for any order Bezier function, not only cubic Not very efficient to evaluate Other forms more commonly used But: Gives intuition about the geometry Useful for subdivision 33
34 De Casteljau Algorithm Given: Four control points A value of t (here t 0.25) p 1 p 0 p 2 p 3 34
35 De Casteljau Algorithm p 1 q 1 q 0 (t) = Lerp( t,p 0,p ) 1 p 0 q 0 ( ) q 1 (t) = Lerp t,p 1,p 2 p 2 q 2 (t) = Lerp( t,p 2,p ) 3 q 2 p 3 35
36 De Casteljau Algorithm q 1 q r 0 0 r 1 ( ) r 0 (t) = Lerp t,q 0 (t),q 1 (t) r 1 (t) = Lerp( t,q 1 (t),q 2 (t)) q 2 36
37 De Casteljau Algorithm r 0 x r 1 x(t) = Lerp( t,r 0 (t),r 1 (t)) 37
38 De Casteljau Algorithm p 1 p 0 x p 2 Applets Demo: p 3
39 Recursive Linear Interpolation x = Lerp t,r 0,r 1 ( ) r = Lerp ( t,q,q ) ( ) r 1 = Lerp t,q 1,q 2 q 0 = Lerp( t,p 0,p ) 1 q 1 = Lerp( t,p 1,p ) 2 q 2 = Lerp( t,p 2,p ) 3 p 0 p 1 p 2 p 3 p 1 q 0 r 0 p 2 x q 1 r 1 p 3 q 2 p 4 39
40 Expand the LERPs q 0 (t) = Lerp( t,p 0,p 1 )= ( 1 t)p 0 + tp 1 q 1 (t) = Lerp( t,p 1,p 2 )= ( 1 t)p 1 + tp 2 q 2 (t) = Lerp( t,p 2,p 3 )= ( 1 t)p 2 + tp 3 r 0 (t) = Lerp ( t,q 0 (t),q 1 (t) )= 1 t r 1 (t) = Lerp( t,q 1 (t),q 2 (t))= 1 t ( ) ( )p 0 + tp 1 )+ t ( 1 t )p 1 + tp 2 ( )p 1 + tp 2 )+ t ( 1 t)p 2 + tp 3 ( ) 1 t ( ) 1 t x(t) = Lerp t,r 0 (t),r 1 (t) = ( 1 t) ( 1 t) ( 1 t)p 0 + tp 1 )+ t ( 1 t)p 1 + tp 2 +t ( 1 t) ( 1 t)p 1 + tp 2 )+ t ( 1 t)p 2 + tp 3 40 ( ) ( ) ( ) ( ) ( ) ( )
41 Weighted Average of Control Points Regroup for p: x(t) = 1 t ( )p 0 + tp 1 )+ t ( 1 t)p 1 + tp 2 ( )p 1 + tp 2 )+ t( 1 t)p 2 + tp 3 ) ( ) ( 1 t) 1 t +t 1 t ( ) ( ) ( ) 1 t ( ) x(t) = 1 t ( ) 3 p ( ) ( 1 t) 2 tp t ( )t 2 p 2 + t 3 p 3 B 0 (t ) B (t ) x(t) = t 3 + 3t 2 3t + 1 p 0 + 3t 3 6t 2 + 3t ( ) ( ) + 3t 3 + 3t p + t 3 2 { p 3 B 2 (t ) ( ) B 3 (t ) ( ) p 1 41
42 Cubic Bernstein Polynomials x(t) = B 0 ( t)p 0 + B 1 ( t)p 1 + B 2 ( t)p 2 + B 3 ( t)p 3 The cubic Bernstein polynomials : B 0 ( t)= t 3 + 3t 2 3t + 1 B 1 ( t)= 3t 3 6t 2 + 3t B 2 ( t)= 3t 3 + 3t 2 ( t)= t 3 B 3 B i (t) = 1 Weights B i (t) add up to 1 for any value of t 42
43 General Bernstein Polynomials B 1 0 B 1 1 ( t)= t + 1 B 2 0 ( t)= t 2 2t + 1 B 3 0 ( t)= t 3 + 3t 2 3t + 1 ( t)= t B 2 1 ( t)= 2t 2 + 2t B 3 1 ( t)= 3t 3 6t 2 + 3t B 2 2 ( t)= t 2 B 3 2 ( t)= 3t 3 + 3t 2 B 3 3 ( t)= t 3 43 B i n ( t)= n i ( 1 t)n i t B n i ( t) = 1 n ( ) i i = n! i! ( n i)! n! = factorial of n (n+1)! = n! x (n+1)
44 General Bézier Curves nth-order Bernstein polynomials form nth-order Bézier curves B i n ( t)= n ( 1 t)n i t i n i=0 x( t)= B n i ( t)p i ( ) i 44
45 Bézier Curve Properties Overview: Convex Hull property Variation Diminishing property Affine Invariance 45
46 Definitions Convex hull of a set of points: Polyhedral volume created such that all lines connecting any two points lie completely inside it (or on its boundary) Convex combination of a set of points: Weighted average of the points, where all weights between 0 and 1, sum up to 1 Any convex combination of a set of points lies within the convex hull 46
47 Convex Hull Property A Bézier curve is a convex combination of the control points (by definition, see Bernstein polynomials) A Bézier curve is always inside the convex hull Makes curve predictable Allows culling, intersection testing, adaptive tessellation Demo: p 1 p 3 p 0 p 2 47

48 Variation Diminishing Property If the curve is in a plane, this means no straight line intersects a Bézier curve more times than it intersects the curve's control polyline Curve is not more wiggly than control polyline 48
49 Affine Invariance Transforming Bézier curves Two ways to transform: Transform the control points, then compute resulting spline points Compute spline points, then transform them Either way, we get the same points Curve is defined via affine combination of points Invariant under affine transformations (i.e., translation, scale, rotation, shear) Convex hull property remains true 49
50 Cubic Polynomial Form Start with Bernstein form: x(t) = ( t 3 + 3t 2 3t + 1)p 0 + ( 3t 3 6t 2 + 3t)p 1 + ( 3t 3 + 3t 2 )p 2 + ( t 3 )p 3 Regroup into coefficients of t : x(t) = ( p 0 + 3p 1 3p 2 + p 3 )t 3 + ( 3p 0 6p 1 + 3p 2 )t 2 + ( 3p 0 + 3p 1 )t + ( p 0 )1 x(t) = at 3 + bt 2 + ct + d ( ) ( ) ( ) ( ) a = p 0 + 3p 1 3p 2 + p 3 b = 3p 0 6p 1 + 3p 2 c = 3p 0 + 3p 1 d = p 0 Good for fast evaluation Precompute constant coefficients (a,b,c,d) Not much geometric intuition 50
51 Cubic Matrix Form x(t) = a r t 3 r b c r t 2 d t 1 r a = p 0 + 3p 1 3p 2 + p 3 r b = ( 3p 0 6p 1 + 3p 2 ) r c = ( 3p 0 + 3p 1 ) d = p 0 ( ) ( ) t x(t) = [ p 0 p 1 p 2 p 3 ] t t { T G Bez B Bez Other types of cubic splines use different basis matrices B Bez 51
52 Cubic Matrix Form In 3D: 3 equations for x, y and z: 52 [ ] x x (t) = p 0 x p 1x p 2 x p 3x x y (t) = p 0 y p 1y p 2 y p 3y x z (t) = p 0z p 1z p 2z p 3z t t t t t t t t t
53 Matrix Form Bundle into a single matrix x(t) = t 3 p 0 x p 1x p 2 x p 3x p 0 y p 1y p 2 y p 3y t t p 0z p 1z p 2z p 3z x(t) = G Bez B Bez T x(t) = C T Efficient evaluation Pre-compute C Take advantage of existing 4x4 matrix hardware support 53
Computergrafik. Matthias Zwicker Universität Bern Herbst 2016
 Computergrafik Matthias Zwicker Universität Bern Herbst 2016 2 Today Curves Introduction Polynomial curves Bézier curves Drawing Bézier curves Piecewise curves Modeling Creating 3D objects How to construct
Computergrafik Matthias Zwicker Universität Bern Herbst 2016 2 Today Curves Introduction Polynomial curves Bézier curves Drawing Bézier curves Piecewise curves Modeling Creating 3D objects How to construct
CMSC427 Parametric curves: Hermite, Catmull-Rom, Bezier
 CMSC427 Parametric curves: Hermite, Catmull-Rom, Bezier Modeling Creating 3D objects How to construct complicated surfaces? Goal Specify objects with few control points Resulting object should be visually
CMSC427 Parametric curves: Hermite, Catmull-Rom, Bezier Modeling Creating 3D objects How to construct complicated surfaces? Goal Specify objects with few control points Resulting object should be visually
Interpolation and polynomial approximation Interpolation
 Outline Interpolation and polynomial approximation Interpolation Lagrange Cubic Splines Approximation B-Splines 1 Outline Approximation B-Splines We still focus on curves for the moment. 2 3 Pierre Bézier
Outline Interpolation and polynomial approximation Interpolation Lagrange Cubic Splines Approximation B-Splines 1 Outline Approximation B-Splines We still focus on curves for the moment. 2 3 Pierre Bézier
On-Line Geometric Modeling Notes
 On-Line Geometric Modeling Notes CUBIC BÉZIER CURVES Kenneth I. Joy Visualization and Graphics Research Group Department of Computer Science University of California, Davis Overview The Bézier curve representation
On-Line Geometric Modeling Notes CUBIC BÉZIER CURVES Kenneth I. Joy Visualization and Graphics Research Group Department of Computer Science University of California, Davis Overview The Bézier curve representation
M2R IVR, October 12th Mathematical tools 1 - Session 2
 Mathematical tools 1 Session 2 Franck HÉTROY M2R IVR, October 12th 2006 First session reminder Basic definitions Motivation: interpolate or approximate an ordered list of 2D points P i n Definition: spline
Mathematical tools 1 Session 2 Franck HÉTROY M2R IVR, October 12th 2006 First session reminder Basic definitions Motivation: interpolate or approximate an ordered list of 2D points P i n Definition: spline
Sample Exam 1 KEY NAME: 1. CS 557 Sample Exam 1 KEY. These are some sample problems taken from exams in previous years. roughly ten questions.
 Sample Exam 1 KEY NAME: 1 CS 557 Sample Exam 1 KEY These are some sample problems taken from exams in previous years. roughly ten questions. Your exam will have 1. (0 points) Circle T or T T Any curve
Sample Exam 1 KEY NAME: 1 CS 557 Sample Exam 1 KEY These are some sample problems taken from exams in previous years. roughly ten questions. Your exam will have 1. (0 points) Circle T or T T Any curve
Lecture 20: Bezier Curves & Splines
 Lecture 20: Bezier Curves & Splines December 6, 2016 12/6/16 CSU CS410 Bruce Draper & J. Ross Beveridge 1 Review: The Pen Metaphore Think of putting a pen to paper Pen position described by time t Seeing
Lecture 20: Bezier Curves & Splines December 6, 2016 12/6/16 CSU CS410 Bruce Draper & J. Ross Beveridge 1 Review: The Pen Metaphore Think of putting a pen to paper Pen position described by time t Seeing
Lecture 23: Hermite and Bezier Curves
 Lecture 23: Hermite and Bezier Curves November 16, 2017 11/16/17 CSU CS410 Fall 2017, Ross Beveridge & Bruce Draper 1 Representing Curved Objects So far we ve seen Polygonal objects (triangles) and Spheres
Lecture 23: Hermite and Bezier Curves November 16, 2017 11/16/17 CSU CS410 Fall 2017, Ross Beveridge & Bruce Draper 1 Representing Curved Objects So far we ve seen Polygonal objects (triangles) and Spheres
Bézier Curves and Splines
 CS-C3100 Computer Graphics Bézier Curves and Splines Majority of slides from Frédo Durand vectorportal.com CS-C3100 Fall 2017 Lehtinen Before We Begin Anything on your mind concerning Assignment 1? CS-C3100
CS-C3100 Computer Graphics Bézier Curves and Splines Majority of slides from Frédo Durand vectorportal.com CS-C3100 Fall 2017 Lehtinen Before We Begin Anything on your mind concerning Assignment 1? CS-C3100
Arsène Pérard-Gayot (Slides by Piotr Danilewski)
") Computer Graphics - Splines - Arsène Pérard-Gayot (Slides by Piotr Danilewski) CURVES Curves Explicit y = f x f: R R γ = x, f x y = 1 x 2 Implicit F x, y = 0 F: R 2 R γ = x, y : F x, y = 0 x 2 + y 2 =
Computer Graphics - Splines - Arsène Pérard-Gayot (Slides by Piotr Danilewski) CURVES Curves Explicit y = f x f: R R γ = x, f x y = 1 x 2 Implicit F x, y = 0 F: R 2 R γ = x, y : F x, y = 0 x 2 + y 2 =
Introduction to Computer Graphics. Modeling (1) April 13, 2017 Kenshi Takayama
 April 13, 2017 Kenshi Takayama") Introduction to Computer Graphics Modeling (1) April 13, 2017 Kenshi Takayama Parametric curves X & Y coordinates defined by parameter t ( time) Example: Cycloid x t = t sin t y t = 1 cos t Tangent (aka.
Introduction to Computer Graphics Modeling (1) April 13, 2017 Kenshi Takayama Parametric curves X & Y coordinates defined by parameter t ( time) Example: Cycloid x t = t sin t y t = 1 cos t Tangent (aka.
Approximation of Circular Arcs by Parametric Polynomials
 Approximation of Circular Arcs by Parametric Polynomials Emil Žagar Lecture on Geometric Modelling at Charles University in Prague December 6th 2017 1 / 44 Outline Introduction Standard Reprezentations
Approximation of Circular Arcs by Parametric Polynomials Emil Žagar Lecture on Geometric Modelling at Charles University in Prague December 6th 2017 1 / 44 Outline Introduction Standard Reprezentations
Curves, Surfaces and Segments, Patches
 Curves, Surfaces and Segments, atches The University of Texas at Austin Conics: Curves and Quadrics: Surfaces Implicit form arametric form Rational Bézier Forms and Join Continuity Recursive Subdivision
Curves, Surfaces and Segments, atches The University of Texas at Austin Conics: Curves and Quadrics: Surfaces Implicit form arametric form Rational Bézier Forms and Join Continuity Recursive Subdivision
Curves. Hakan Bilen University of Edinburgh. Computer Graphics Fall Some slides are courtesy of Steve Marschner and Taku Komura
 Curves Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Taku Komura How to create a virtual world? To compose scenes We need to define objects
Curves Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Taku Komura How to create a virtual world? To compose scenes We need to define objects
MAT300/500 Programming Project Spring 2019
 MAT300/500 Programming Project Spring 2019 Please submit all project parts on the Moodle page for MAT300 or MAT500. Due dates are listed on the syllabus and the Moodle site. You should include all neccessary
MAT300/500 Programming Project Spring 2019 Please submit all project parts on the Moodle page for MAT300 or MAT500. Due dates are listed on the syllabus and the Moodle site. You should include all neccessary
CGT 511. Curves. Curves. Curves. What is a curve? 2) A continuous map of a 1D space to an nd space
 A continuous map of a 1D space to an nd space") Curves CGT 511 Curves Bedřich Beneš, Ph.D. Purdue University Department of Computer Graphics Technology What is a curve? Mathematical ldefinition i i is a bit complex 1) The continuous o image of an interval
Curves CGT 511 Curves Bedřich Beneš, Ph.D. Purdue University Department of Computer Graphics Technology What is a curve? Mathematical ldefinition i i is a bit complex 1) The continuous o image of an interval
Bernstein polynomials of degree N are defined by
 SEC. 5.5 BÉZIER CURVES 309 5.5 Bézier Curves Pierre Bézier at Renault and Paul de Casteljau at Citroën independently developed the Bézier curve for CAD/CAM operations, in the 1970s. These parametrically
SEC. 5.5 BÉZIER CURVES 309 5.5 Bézier Curves Pierre Bézier at Renault and Paul de Casteljau at Citroën independently developed the Bézier curve for CAD/CAM operations, in the 1970s. These parametrically
1.1. The analytical denition. Denition. The Bernstein polynomials of degree n are dened analytically:
 DEGREE REDUCTION OF BÉZIER CURVES DAVE MORGAN Abstract. This paper opens with a description of Bézier curves. Then, techniques for the degree reduction of Bézier curves, along with a discussion of error
DEGREE REDUCTION OF BÉZIER CURVES DAVE MORGAN Abstract. This paper opens with a description of Bézier curves. Then, techniques for the degree reduction of Bézier curves, along with a discussion of error
Introduction to Curves. Modelling. 3D Models. Points. Lines. Polygons Defined by a sequence of lines Defined by a list of ordered points
 Introduction to Curves Modelling Points Defined by 2D or 3D coordinates Lines Defined by a set of 2 points Polygons Defined by a sequence of lines Defined by a list of ordered points 3D Models Triangular
Introduction to Curves Modelling Points Defined by 2D or 3D coordinates Lines Defined by a set of 2 points Polygons Defined by a sequence of lines Defined by a list of ordered points 3D Models Triangular
Computer Graphics Keyframing and Interpola8on
 Computer Graphics Keyframing and Interpola8on This Lecture Keyframing and Interpola2on two topics you are already familiar with from your Blender modeling and anima2on of a robot arm Interpola2on linear
Computer Graphics Keyframing and Interpola8on This Lecture Keyframing and Interpola2on two topics you are already familiar with from your Blender modeling and anima2on of a robot arm Interpola2on linear
Lagrange Interpolation and Neville s Algorithm. Ron Goldman Department of Computer Science Rice University
 Lagrange Interpolation and Neville s Algorithm Ron Goldman Department of Computer Science Rice University Tension between Mathematics and Engineering 1. How do Mathematicians actually represent curves
Lagrange Interpolation and Neville s Algorithm Ron Goldman Department of Computer Science Rice University Tension between Mathematics and Engineering 1. How do Mathematicians actually represent curves
The Essentials of CAGD
 The Essentials of CAGD Chapter 4: Bézier Curves: Cubic and Beyond Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/essentials-cagd c 2000
The Essentials of CAGD Chapter 4: Bézier Curves: Cubic and Beyond Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/essentials-cagd c 2000
MA 323 Geometric Modelling Course Notes: Day 07 Parabolic Arcs
 MA 323 Geometric Modelling Course Notes: Day 07 Parabolic Arcs David L. Finn December 9th, 2004 We now start considering the basic curve elements to be used throughout this course; polynomial curves and
MA 323 Geometric Modelling Course Notes: Day 07 Parabolic Arcs David L. Finn December 9th, 2004 We now start considering the basic curve elements to be used throughout this course; polynomial curves and
Smooth Path Generation Based on Bézier Curves for Autonomous Vehicles
 Smooth Path Generation Based on Bézier Curves for Autonomous Vehicles Ji-wung Choi, Renwick E. Curry, Gabriel Hugh Elkaim Abstract In this paper we present two path planning algorithms based on Bézier
Smooth Path Generation Based on Bézier Curves for Autonomous Vehicles Ji-wung Choi, Renwick E. Curry, Gabriel Hugh Elkaim Abstract In this paper we present two path planning algorithms based on Bézier
MA 323 Geometric Modelling Course Notes: Day 12 de Casteljau s Algorithm and Subdivision
 MA 323 Geometric Modelling Course Notes: Day 12 de Casteljau s Algorithm and Subdivision David L. Finn Yesterday, we introduced barycentric coordinates and de Casteljau s algorithm. Today, we want to go
MA 323 Geometric Modelling Course Notes: Day 12 de Casteljau s Algorithm and Subdivision David L. Finn Yesterday, we introduced barycentric coordinates and de Casteljau s algorithm. Today, we want to go
Cubic Splines; Bézier Curves
 Cubic Splines; Bézier Curves 1 Cubic Splines piecewise approximation with cubic polynomials conditions on the coefficients of the splines 2 Bézier Curves computer-aided design and manufacturing MCS 471
Cubic Splines; Bézier Curves 1 Cubic Splines piecewise approximation with cubic polynomials conditions on the coefficients of the splines 2 Bézier Curves computer-aided design and manufacturing MCS 471
AFFINE COMBINATIONS, BARYCENTRIC COORDINATES, AND CONVEX COMBINATIONS
 On-Line Geometric Modeling Notes AFFINE COMBINATIONS, BARYCENTRIC COORDINATES, AND CONVEX COMBINATIONS Kenneth I. Joy Visualization and Graphics Research Group Department of Computer Science University
On-Line Geometric Modeling Notes AFFINE COMBINATIONS, BARYCENTRIC COORDINATES, AND CONVEX COMBINATIONS Kenneth I. Joy Visualization and Graphics Research Group Department of Computer Science University
CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer
 CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer Jürgen P. Schulze, Ph.D. University of California, San Diego Spring Quarter 2016 Announcements Project 1 due next Friday at
CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer Jürgen P. Schulze, Ph.D. University of California, San Diego Spring Quarter 2016 Announcements Project 1 due next Friday at
Spiral spline interpolation to a planar spiral
 Spiral spline interpolation to a planar spiral Zulfiqar Habib Department of Mathematics and Computer Science, Graduate School of Science and Engineering, Kagoshima University Manabu Sakai Department of
Spiral spline interpolation to a planar spiral Zulfiqar Habib Department of Mathematics and Computer Science, Graduate School of Science and Engineering, Kagoshima University Manabu Sakai Department of
CONTROL POLYGONS FOR CUBIC CURVES
 On-Line Geometric Modeling Notes CONTROL POLYGONS FOR CUBIC CURVES Kenneth I. Joy Visualization and Graphics Research Group Department of Computer Science University of California, Davis Overview B-Spline
On-Line Geometric Modeling Notes CONTROL POLYGONS FOR CUBIC CURVES Kenneth I. Joy Visualization and Graphics Research Group Department of Computer Science University of California, Davis Overview B-Spline
Visualizing Bezier s curves: some applications of Dynamic System Geogebra
 Visualizing Bezier s curves: some applications of Dynamic System Geogebra Francisco Regis Vieira Alves Instituto Federal de Educação, Ciência e Tecnologia do Estado do Ceará IFCE. Brazil fregis@ifce.edu.br
Visualizing Bezier s curves: some applications of Dynamic System Geogebra Francisco Regis Vieira Alves Instituto Federal de Educação, Ciência e Tecnologia do Estado do Ceará IFCE. Brazil fregis@ifce.edu.br
Keyframing. CS 448D: Character Animation Prof. Vladlen Koltun Stanford University
 Keyframing CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Keyframing in traditional animation Master animator draws key frames Apprentice fills in the in-between frames Keyframing
Keyframing CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Keyframing in traditional animation Master animator draws key frames Apprentice fills in the in-between frames Keyframing
CS 536 Computer Graphics NURBS Drawing Week 4, Lecture 6
 CS 536 Computer Graphics NURBS Drawing Week 4, Lecture 6 David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 Outline Conic Sections via NURBS Knot insertion
CS 536 Computer Graphics NURBS Drawing Week 4, Lecture 6 David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 Outline Conic Sections via NURBS Knot insertion
CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer
 CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements Monday October 3: Discussion Assignment
CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements Monday October 3: Discussion Assignment
Lecture 20: Lagrange Interpolation and Neville s Algorithm. for I will pass through thee, saith the LORD. Amos 5:17
 Lecture 20: Lagrange Interpolation and Neville s Algorithm for I will pass through thee, saith the LORD. Amos 5:17 1. Introduction Perhaps the easiest way to describe a shape is to select some points on
Lecture 20: Lagrange Interpolation and Neville s Algorithm for I will pass through thee, saith the LORD. Amos 5:17 1. Introduction Perhaps the easiest way to describe a shape is to select some points on
Continuous Curvature Path Generation Based on Bézier Curves for Autonomous Vehicles
 Continuous Curvature Path Generation Based on Bézier Curves for Autonomous Vehicles Ji-wung Choi, Renwick E. Curry, Gabriel Hugh Elkaim Abstract In this paper we present two path planning algorithms based
Continuous Curvature Path Generation Based on Bézier Curves for Autonomous Vehicles Ji-wung Choi, Renwick E. Curry, Gabriel Hugh Elkaim Abstract In this paper we present two path planning algorithms based
Q( t) = T C T =! " t 3,t 2,t,1# Q( t) T = C T T T. Announcements. Bezier Curves and Splines. Review: Third Order Curves. Review: Cubic Examples
 = T C T =! t 3,t 2,t,1# Q( t) T = C T T T. Announcements. Bezier Curves and Splines. Review: Third Order Curves. Review: Cubic Examples") Bezier Curves an Splines December 1, 2015 Announcements PA4 ue one week from toay Submit your most fun test cases, too! Infinitely thin planes with parallel sies μ oesn t matter Term Paper ue one week
Bezier Curves an Splines December 1, 2015 Announcements PA4 ue one week from toay Submit your most fun test cases, too! Infinitely thin planes with parallel sies μ oesn t matter Term Paper ue one week
Home Page. Title Page. Contents. Bezier Curves. Milind Sohoni sohoni. Page 1 of 27. Go Back. Full Screen. Close.
 Bezier Curves Page 1 of 27 Milind Sohoni http://www.cse.iitb.ac.in/ sohoni Recall Lets recall a few things: 1. f : [0, 1] R is a function. 2. f 0,..., f i,..., f n are observations of f with f i = f( i
Bezier Curves Page 1 of 27 Milind Sohoni http://www.cse.iitb.ac.in/ sohoni Recall Lets recall a few things: 1. f : [0, 1] R is a function. 2. f 0,..., f i,..., f n are observations of f with f i = f( i
MA 323 Geometric Modelling Course Notes: Day 11 Barycentric Coordinates and de Casteljau s algorithm
 MA 323 Geometric Modelling Course Notes: Day 11 Barycentric Coordinates and de Casteljau s algorithm David L. Finn December 16th, 2004 Today, we introduce barycentric coordinates as an alternate to using
MA 323 Geometric Modelling Course Notes: Day 11 Barycentric Coordinates and de Casteljau s algorithm David L. Finn December 16th, 2004 Today, we introduce barycentric coordinates as an alternate to using
Animation Curves and Splines 1
 Animation Curves and Splines 1 Animation Homework Set up a simple avatar E.g. cube/sphere (or square/circle if 2D) Specify some key frames (positions/orientations) Associate a time with each key frame
Animation Curves and Splines 1 Animation Homework Set up a simple avatar E.g. cube/sphere (or square/circle if 2D) Specify some key frames (positions/orientations) Associate a time with each key frame
Subdivision Matrices and Iterated Function Systems for Parametric Interval Bezier Curves
 International Journal of Video&Image Processing Network Security IJVIPNS-IJENS Vol:7 No:0 Subdivision Matrices Iterated Function Systems for Parametric Interval Bezier Curves O. Ismail, Senior Member,
International Journal of Video&Image Processing Network Security IJVIPNS-IJENS Vol:7 No:0 Subdivision Matrices Iterated Function Systems for Parametric Interval Bezier Curves O. Ismail, Senior Member,
Reading. w Foley, Section 11.2 Optional
 Parametric Curves w Foley, Section.2 Optional Reading w Bartels, Beatty, and Barsky. An Introduction to Splines for use in Computer Graphics and Geometric Modeling, 987. w Farin. Curves and Surfaces for
Parametric Curves w Foley, Section.2 Optional Reading w Bartels, Beatty, and Barsky. An Introduction to Splines for use in Computer Graphics and Geometric Modeling, 987. w Farin. Curves and Surfaces for
CMSC427 Geometry and Vectors
 CMSC427 Geometry and Vectors Review: where are we? Parametric curves and Hw1? Going beyond the course: generative art https://www.openprocessing.org Brandon Morse, Art Dept, ART370 Polylines, Processing
CMSC427 Geometry and Vectors Review: where are we? Parametric curves and Hw1? Going beyond the course: generative art https://www.openprocessing.org Brandon Morse, Art Dept, ART370 Polylines, Processing
Characterization of Planar Cubic Alternative curve. Perak, M sia. M sia. Penang, M sia.
 Characterization of Planar Cubic Alternative curve. Azhar Ahmad α, R.Gobithasan γ, Jamaluddin Md.Ali β, α Dept. of Mathematics, Sultan Idris University of Education, 59 Tanjung Malim, Perak, M sia. γ Dept
Characterization of Planar Cubic Alternative curve. Azhar Ahmad α, R.Gobithasan γ, Jamaluddin Md.Ali β, α Dept. of Mathematics, Sultan Idris University of Education, 59 Tanjung Malim, Perak, M sia. γ Dept
Curve Fitting: Fertilizer, Fonts, and Ferraris
 Curve Fitting: Fertilizer, Fonts, and Ferraris Is that polynomial a model or just a pretty curve? 22 nd CMC3-South Annual Conference March 3, 2007 Anaheim, CA Katherine Yoshiwara Bruce Yoshiwara Los Angeles
Curve Fitting: Fertilizer, Fonts, and Ferraris Is that polynomial a model or just a pretty curve? 22 nd CMC3-South Annual Conference March 3, 2007 Anaheim, CA Katherine Yoshiwara Bruce Yoshiwara Los Angeles
Announcements September 19
 Announcements September 19 Please complete the mid-semester CIOS survey this week The first midterm will take place during recitation a week from Friday, September 3 It covers Chapter 1, sections 1 5 and
Announcements September 19 Please complete the mid-semester CIOS survey this week The first midterm will take place during recitation a week from Friday, September 3 It covers Chapter 1, sections 1 5 and
NFC ACADEMY COURSE OVERVIEW
 NFC ACADEMY COURSE OVERVIEW Algebra I Fundamentals is a full year, high school credit course that is intended for the student who has successfully mastered the core algebraic concepts covered in the prerequisite
NFC ACADEMY COURSE OVERVIEW Algebra I Fundamentals is a full year, high school credit course that is intended for the student who has successfully mastered the core algebraic concepts covered in the prerequisite
Applied Math 205. Full office hour schedule:
 Applied Math 205 Full office hour schedule: Rui: Monday 3pm 4:30pm in the IACS lounge Martin: Monday 4:30pm 6pm in the IACS lounge Chris: Tuesday 1pm 3pm in Pierce Hall, Room 305 Nao: Tuesday 3pm 4:30pm
Applied Math 205 Full office hour schedule: Rui: Monday 3pm 4:30pm in the IACS lounge Martin: Monday 4:30pm 6pm in the IACS lounge Chris: Tuesday 1pm 3pm in Pierce Hall, Room 305 Nao: Tuesday 3pm 4:30pm
THE UNIVERSITY OF BRITISH COLUMBIA Midterm Examination 14 March 2001
 THE UNIVERSITY OF BRITISH COLUMBIA Midterm Examination 14 March 001 Student s Name: Computer Science 414 Section 01 Introduction to Computer Graphics Time: 50 minutes (Please print in BLOCK letters, SURNAME
THE UNIVERSITY OF BRITISH COLUMBIA Midterm Examination 14 March 001 Student s Name: Computer Science 414 Section 01 Introduction to Computer Graphics Time: 50 minutes (Please print in BLOCK letters, SURNAME
Pythagorean-hodograph curves
 1 / 24 Pythagorean-hodograph curves V. Vitrih Raziskovalni matematični seminar 20. 2. 2012 2 / 24 1 2 3 4 5 3 / 24 Let r : [a, b] R 2 be a planar polynomial parametric curve ( ) x(t) r(t) =, y(t) where
1 / 24 Pythagorean-hodograph curves V. Vitrih Raziskovalni matematični seminar 20. 2. 2012 2 / 24 1 2 3 4 5 3 / 24 Let r : [a, b] R 2 be a planar polynomial parametric curve ( ) x(t) r(t) =, y(t) where
MA 323 Geometric Modelling Course Notes: Day 20 Curvature and G 2 Bezier splines
 MA 323 Geometric Modelling Course Notes: Day 20 Curvature and G 2 Bezier splines David L. Finn Yesterday, we introduced the notion of curvature and how it plays a role formally in the description of curves,
MA 323 Geometric Modelling Course Notes: Day 20 Curvature and G 2 Bezier splines David L. Finn Yesterday, we introduced the notion of curvature and how it plays a role formally in the description of curves,
Computer Aided Design. B-Splines
 1 Three useful references : R. Bartels, J.C. Beatty, B. A. Barsky, An introduction to Splines for use in Computer Graphics and Geometric Modeling, Morgan Kaufmann Publications,1987 JC.Léon, Modélisation
1 Three useful references : R. Bartels, J.C. Beatty, B. A. Barsky, An introduction to Splines for use in Computer Graphics and Geometric Modeling, Morgan Kaufmann Publications,1987 JC.Léon, Modélisation
RADNOR TOWNSHIP SCHOOL DISTRICT Course Overview Honors Algebra 2 ( )
") RADNOR TOWNSHIP SCHOOL DISTRICT Course Overview Honors Algebra 2 (05040432) General Information Prerequisite: 8th grade Algebra 1 with a C and Geometry Honors Length: Full Year Format: meets daily for
RADNOR TOWNSHIP SCHOOL DISTRICT Course Overview Honors Algebra 2 (05040432) General Information Prerequisite: 8th grade Algebra 1 with a C and Geometry Honors Length: Full Year Format: meets daily for
Outline. 1 Interpolation. 2 Polynomial Interpolation. 3 Piecewise Polynomial Interpolation
 Outline Interpolation 1 Interpolation 2 3 Michael T. Heath Scientific Computing 2 / 56 Interpolation Motivation Choosing Interpolant Existence and Uniqueness Basic interpolation problem: for given data
Outline Interpolation 1 Interpolation 2 3 Michael T. Heath Scientific Computing 2 / 56 Interpolation Motivation Choosing Interpolant Existence and Uniqueness Basic interpolation problem: for given data
Geometric Lagrange Interpolation by Planar Cubic Pythagorean-hodograph Curves
 Geometric Lagrange Interpolation by Planar Cubic Pythagorean-hodograph Curves Gašper Jaklič a,c, Jernej Kozak a,b, Marjeta Krajnc b, Vito Vitrih c, Emil Žagar a,b, a FMF, University of Ljubljana, Jadranska
Geometric Lagrange Interpolation by Planar Cubic Pythagorean-hodograph Curves Gašper Jaklič a,c, Jernej Kozak a,b, Marjeta Krajnc b, Vito Vitrih c, Emil Žagar a,b, a FMF, University of Ljubljana, Jadranska
Announcements. Review. Announcements. Piecewise Affine Quadratic Lyapunov Theory. EECE 571M/491M, Spring 2007 Lecture 9
 EECE 571M/491M, Spring 2007 Lecture 9 Piecewise Affine Quadratic Lyapunov Theory Meeko Oishi, Ph.D. Electrical and Computer Engineering University of British Columbia, BC Announcements Lecture review examples
EECE 571M/491M, Spring 2007 Lecture 9 Piecewise Affine Quadratic Lyapunov Theory Meeko Oishi, Ph.D. Electrical and Computer Engineering University of British Columbia, BC Announcements Lecture review examples
56 CHAPTER 3. POLYNOMIAL FUNCTIONS
 56 CHAPTER 3. POLYNOMIAL FUNCTIONS Chapter 4 Rational functions and inequalities 4.1 Rational functions Textbook section 4.7 4.1.1 Basic rational functions and asymptotes As a first step towards understanding
56 CHAPTER 3. POLYNOMIAL FUNCTIONS Chapter 4 Rational functions and inequalities 4.1 Rational functions Textbook section 4.7 4.1.1 Basic rational functions and asymptotes As a first step towards understanding
Hermite Interpolation with Euclidean Pythagorean Hodograph Curves
 Hermite Interpolation with Euclidean Pythagorean Hodograph Curves Zbyněk Šír Faculty of Mathematics and Physics, Charles University in Prague Sokolovská 83, 86 75 Praha 8 zbynek.sir@mff.cuni.cz Abstract.
Hermite Interpolation with Euclidean Pythagorean Hodograph Curves Zbyněk Šír Faculty of Mathematics and Physics, Charles University in Prague Sokolovská 83, 86 75 Praha 8 zbynek.sir@mff.cuni.cz Abstract.
Demo 5. 1 Degree Reduction and Raising Matrices for Degree 5
 Demo This demo contains the calculation procedures to generate the results shown in Appendix A of the lab report. Degree Reduction and Raising Matrices for Degree M,4 = 3 4 4 4 3 4 3 4 4 4 3 4 4 M 4, =
Demo This demo contains the calculation procedures to generate the results shown in Appendix A of the lab report. Degree Reduction and Raising Matrices for Degree M,4 = 3 4 4 4 3 4 3 4 4 4 3 4 4 M 4, =
Novel polynomial Bernstein bases and Bézier curves based on a general notion of polynomial blossoming
 See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/283943635 Novel polynomial Bernstein bases and Bézier curves based on a general notion of polynomial
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/283943635 Novel polynomial Bernstein bases and Bézier curves based on a general notion of polynomial
Chapter 1 Numerical approximation of data : interpolation, least squares method
 Chapter 1 Numerical approximation of data : interpolation, least squares method I. Motivation 1 Approximation of functions Evaluation of a function Which functions (f : R R) can be effectively evaluated
Chapter 1 Numerical approximation of data : interpolation, least squares method I. Motivation 1 Approximation of functions Evaluation of a function Which functions (f : R R) can be effectively evaluated
Lecture 8: Coordinate Frames. CITS3003 Graphics & Animation
 Lecture 8: Coordinate Frames CITS3003 Graphics & Animation E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012 Objectives Learn how to define and change coordinate frames Introduce
Lecture 8: Coordinate Frames CITS3003 Graphics & Animation E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012 Objectives Learn how to define and change coordinate frames Introduce
Engineering 7: Introduction to computer programming for scientists and engineers
 Engineering 7: Introduction to computer programming for scientists and engineers Interpolation Recap Polynomial interpolation Spline interpolation Regression and Interpolation: learning functions from
Engineering 7: Introduction to computer programming for scientists and engineers Interpolation Recap Polynomial interpolation Spline interpolation Regression and Interpolation: learning functions from
Analyzing Functions Maximum & Minimum Points Lesson 75
 (A) Lesson Objectives a. Understand what is meant by the term extrema as it relates to functions b. Use graphic and algebraic methods to determine extrema of a function c. Apply the concept of extrema
(A) Lesson Objectives a. Understand what is meant by the term extrema as it relates to functions b. Use graphic and algebraic methods to determine extrema of a function c. Apply the concept of extrema
A matrix Method for Interval Hermite Curve Segmentation O. Ismail, Senior Member, IEEE
 International Journal of Video&Image Processing Network Security IJVIPNS-IJENS Vol:15 No:03 7 A matrix Method for Interal Hermite Cure Segmentation O. Ismail, Senior Member, IEEE Abstract Since the use
International Journal of Video&Image Processing Network Security IJVIPNS-IJENS Vol:15 No:03 7 A matrix Method for Interal Hermite Cure Segmentation O. Ismail, Senior Member, IEEE Abstract Since the use
SPLINE INTERPOLATION
 Spline Background SPLINE INTERPOLATION Problem: high degree interpolating polynomials often have extra oscillations. Example: Runge function f(x = 1 1+4x 2, x [ 1, 1]. 1 1/(1+4x 2 and P 8 (x and P 16 (x
Spline Background SPLINE INTERPOLATION Problem: high degree interpolating polynomials often have extra oscillations. Example: Runge function f(x = 1 1+4x 2, x [ 1, 1]. 1 1/(1+4x 2 and P 8 (x and P 16 (x
A Relationship Between Minimum Bending Energy and Degree Elevation for Bézier Curves
 A Relationship Between Minimum Bending Energy and Degree Elevation for Bézier Curves David Eberly, Geometric Tools, Redmond WA 9852 https://www.geometrictools.com/ This work is licensed under the Creative
A Relationship Between Minimum Bending Energy and Degree Elevation for Bézier Curves David Eberly, Geometric Tools, Redmond WA 9852 https://www.geometrictools.com/ This work is licensed under the Creative
Lesson 6b Rational Exponents & Radical Functions
 Lesson 6b Rational Exponents & Radical Functions In this lesson, we will continue our review of Properties of Exponents and will learn some new properties including those dealing with Rational and Radical
Lesson 6b Rational Exponents & Radical Functions In this lesson, we will continue our review of Properties of Exponents and will learn some new properties including those dealing with Rational and Radical
R1: Sets A set is a collection of objects sets are written using set brackets each object in onset is called an element or member
 Chapter R Review of basic concepts * R1: Sets A set is a collection of objects sets are written using set brackets each object in onset is called an element or member Ex: Write the set of counting numbers
Chapter R Review of basic concepts * R1: Sets A set is a collection of objects sets are written using set brackets each object in onset is called an element or member Ex: Write the set of counting numbers
An O(h 2n ) Hermite approximation for conic sections
 Hermite approximation for conic sections") An O(h 2n ) Hermite approximation for conic sections Michael Floater SINTEF P.O. Box 124, Blindern 0314 Oslo, NORWAY November 1994, Revised March 1996 Abstract. Given a segment of a conic section in the
An O(h 2n ) Hermite approximation for conic sections Michael Floater SINTEF P.O. Box 124, Blindern 0314 Oslo, NORWAY November 1994, Revised March 1996 Abstract. Given a segment of a conic section in the
Mon Jan Improved acceleration models: linear and quadratic drag forces. Announcements: Warm-up Exercise:
 Math 2250-004 Week 4 notes We will not necessarily finish the material from a given day's notes on that day. We may also add or subtract some material as the week progresses, but these notes represent
Math 2250-004 Week 4 notes We will not necessarily finish the material from a given day's notes on that day. We may also add or subtract some material as the week progresses, but these notes represent
G-code and PH curves in CNC Manufacturing
 G-code and PH curves in CNC Manufacturing Zbyněk Šír Institute of Applied Geometry, JKU Linz The research was supported through grant P17387-N12 of the Austrian Science Fund (FWF). Talk overview Motivation
G-code and PH curves in CNC Manufacturing Zbyněk Šír Institute of Applied Geometry, JKU Linz The research was supported through grant P17387-N12 of the Austrian Science Fund (FWF). Talk overview Motivation
Secondary Honors Algebra II Objectives
 Secondary Honors Algebra II Objectives Chapter 1 Equations and Inequalities Students will learn to evaluate and simplify numerical and algebraic expressions, to solve linear and absolute value equations
Secondary Honors Algebra II Objectives Chapter 1 Equations and Inequalities Students will learn to evaluate and simplify numerical and algebraic expressions, to solve linear and absolute value equations
Lecture 5 3D polygonal modeling Part 1: Vector graphics Yong-Jin Liu.
 Fundamentals of Computer Graphics Lecture 5 3D polygonal modeling Part 1: Vector graphics Yong-Jin Liu liuyongjin@tsinghua.edu.cn Material by S.M.Lea (UNC) Introduction In computer graphics, we work with
Fundamentals of Computer Graphics Lecture 5 3D polygonal modeling Part 1: Vector graphics Yong-Jin Liu liuyongjin@tsinghua.edu.cn Material by S.M.Lea (UNC) Introduction In computer graphics, we work with
Scientific Computing
 2301678 Scientific Computing Chapter 2 Interpolation and Approximation Paisan Nakmahachalasint Paisan.N@chula.ac.th Chapter 2 Interpolation and Approximation p. 1/66 Contents 1. Polynomial interpolation
2301678 Scientific Computing Chapter 2 Interpolation and Approximation Paisan Nakmahachalasint Paisan.N@chula.ac.th Chapter 2 Interpolation and Approximation p. 1/66 Contents 1. Polynomial interpolation
3.1 Interpolation and the Lagrange Polynomial
 MATH 4073 Chapter 3 Interpolation and Polynomial Approximation Fall 2003 1 Consider a sample x x 0 x 1 x n y y 0 y 1 y n. Can we get a function out of discrete data above that gives a reasonable estimate
MATH 4073 Chapter 3 Interpolation and Polynomial Approximation Fall 2003 1 Consider a sample x x 0 x 1 x n y y 0 y 1 y n. Can we get a function out of discrete data above that gives a reasonable estimate
2 The De Casteljau algorithm revisited
 A new geometric algorithm to generate spline curves Rui C. Rodrigues Departamento de Física e Matemática Instituto Superior de Engenharia 3030-199 Coimbra, Portugal ruicr@isec.pt F. Silva Leite Departamento
A new geometric algorithm to generate spline curves Rui C. Rodrigues Departamento de Física e Matemática Instituto Superior de Engenharia 3030-199 Coimbra, Portugal ruicr@isec.pt F. Silva Leite Departamento
Computing roots of polynomials by quadratic clipping
 Computing roots of polynomials by quadratic clipping Michael Bartoň and Bert Jüttler Johann Radon Institute for Computational and Applied Mathematics, Austria Johannes Kepler University Linz, Institute
Computing roots of polynomials by quadratic clipping Michael Bartoň and Bert Jüttler Johann Radon Institute for Computational and Applied Mathematics, Austria Johannes Kepler University Linz, Institute
Some notes on Chapter 8: Polynomial and Piecewise-polynomial Interpolation
 Some notes on Chapter 8: Polynomial and Piecewise-polynomial Interpolation See your notes. 1. Lagrange Interpolation (8.2) 1 2. Newton Interpolation (8.3) different form of the same polynomial as Lagrange
Some notes on Chapter 8: Polynomial and Piecewise-polynomial Interpolation See your notes. 1. Lagrange Interpolation (8.2) 1 2. Newton Interpolation (8.3) different form of the same polynomial as Lagrange
GEOMETRIC MODELLING WITH BETA-FUNCTION B-SPLINES, I: PARAMETRIC CURVES
 International Journal of Pure and Applied Mathematics Volume 65 No. 3 2010, 339-360 GEOMETRIC MODELLING WITH BETA-FUNCTION B-SPLINES, I: PARAMETRIC CURVES Arne Lakså 1, Børre Bang 2, Lubomir T. Dechevsky
International Journal of Pure and Applied Mathematics Volume 65 No. 3 2010, 339-360 GEOMETRIC MODELLING WITH BETA-FUNCTION B-SPLINES, I: PARAMETRIC CURVES Arne Lakså 1, Børre Bang 2, Lubomir T. Dechevsky
To find an approximate value of the integral, the idea is to replace, on each subinterval
 Module 6 : Definition of Integral Lecture 18 : Approximating Integral : Trapezoidal Rule [Section 181] Objectives In this section you will learn the following : Mid point and the Trapezoidal methods for
Module 6 : Definition of Integral Lecture 18 : Approximating Integral : Trapezoidal Rule [Section 181] Objectives In this section you will learn the following : Mid point and the Trapezoidal methods for
Introduction. Introduction (2) Easy Problems for Vectors 7/13/2011. Chapter 4. Vector Tools for Graphics
 Easy Problems for Vectors 7/13/2011. Chapter 4. Vector Tools for Graphics") Introduction Chapter 4. Vector Tools for Graphics In computer graphics, we work with objects defined in a three dimensional world (with 2D objects and worlds being just special cases). All objects to be
Introduction Chapter 4. Vector Tools for Graphics In computer graphics, we work with objects defined in a three dimensional world (with 2D objects and worlds being just special cases). All objects to be
Cubic Splines MATH 375. J. Robert Buchanan. Fall Department of Mathematics. J. Robert Buchanan Cubic Splines
 Cubic Splines MATH 375 J. Robert Buchanan Department of Mathematics Fall 2006 Introduction Given data {(x 0, f(x 0 )), (x 1, f(x 1 )),...,(x n, f(x n ))} which we wish to interpolate using a polynomial...
Cubic Splines MATH 375 J. Robert Buchanan Department of Mathematics Fall 2006 Introduction Given data {(x 0, f(x 0 )), (x 1, f(x 1 )),...,(x n, f(x n ))} which we wish to interpolate using a polynomial...
Matrix Methods for the Bernstein Form and Their Application in Global Optimization
 Matrix Methods for the Bernstein Form and Their Application in Global Optimization June, 10 Jihad Titi Jürgen Garloff University of Konstanz Department of Mathematics and Statistics and University of Applied
Matrix Methods for the Bernstein Form and Their Application in Global Optimization June, 10 Jihad Titi Jürgen Garloff University of Konstanz Department of Mathematics and Statistics and University of Applied
B-splines and control theory
 B-splines and control theory Hiroyuki Kano Magnus Egerstedt Hiroaki Nakata Clyde F. Martin Abstract In this paper some of the relationships between B-splines and linear control theory is examined. In particular,
B-splines and control theory Hiroyuki Kano Magnus Egerstedt Hiroaki Nakata Clyde F. Martin Abstract In this paper some of the relationships between B-splines and linear control theory is examined. In particular,
Exam 2. Average: 85.6 Median: 87.0 Maximum: Minimum: 55.0 Standard Deviation: Numerical Methods Fall 2011 Lecture 20
 Exam 2 Average: 85.6 Median: 87.0 Maximum: 100.0 Minimum: 55.0 Standard Deviation: 10.42 Fall 2011 1 Today s class Multiple Variable Linear Regression Polynomial Interpolation Lagrange Interpolation Newton
Exam 2 Average: 85.6 Median: 87.0 Maximum: 100.0 Minimum: 55.0 Standard Deviation: 10.42 Fall 2011 1 Today s class Multiple Variable Linear Regression Polynomial Interpolation Lagrange Interpolation Newton
Path Planning based on Bézier Curve for Autonomous Ground Vehicles
 Path Planning based on Bézier Curve for Autonomous Ground Vehicles Ji-wung Choi Computer Engineering Department University of California Santa Cruz Santa Cruz, CA95064, US jwchoi@soe.ucsc.edu Renwick Curry
Path Planning based on Bézier Curve for Autonomous Ground Vehicles Ji-wung Choi Computer Engineering Department University of California Santa Cruz Santa Cruz, CA95064, US jwchoi@soe.ucsc.edu Renwick Curry
Prentice Hall CME Project, Algebra
 Prentice Hall Advanced Algebra C O R R E L A T E D T O Oregon High School Standards Draft 6.0, March 2009, Advanced Algebra Advanced Algebra A.A.1 Relations and Functions: Analyze functions and relations
Prentice Hall Advanced Algebra C O R R E L A T E D T O Oregon High School Standards Draft 6.0, March 2009, Advanced Algebra Advanced Algebra A.A.1 Relations and Functions: Analyze functions and relations
Planar interpolation with a pair of rational spirals T. N. T. Goodman 1 and D. S. Meek 2
 Planar interpolation with a pair of rational spirals T N T Goodman and D S Meek Abstract Spirals are curves of one-signed monotone increasing or decreasing curvature Spiral segments are fair curves with
Planar interpolation with a pair of rational spirals T N T Goodman and D S Meek Abstract Spirals are curves of one-signed monotone increasing or decreasing curvature Spiral segments are fair curves with
9th and 10th Grade Math Proficiency Objectives Strand One: Number Sense and Operations
 Strand One: Number Sense and Operations Concept 1: Number Sense Understand and apply numbers, ways of representing numbers, the relationships among numbers, and different number systems. Justify with examples
Strand One: Number Sense and Operations Concept 1: Number Sense Understand and apply numbers, ways of representing numbers, the relationships among numbers, and different number systems. Justify with examples
Math 660-Lecture 15: Finite element spaces (I)
") Math 660-Lecture 15: Finite element spaces (I) (Chapter 3, 4.2, 4.3) Before we introduce the concrete spaces, let s first of all introduce the following important lemma. Theorem 1. Let V h consists of
Math 660-Lecture 15: Finite element spaces (I) (Chapter 3, 4.2, 4.3) Before we introduce the concrete spaces, let s first of all introduce the following important lemma. Theorem 1. Let V h consists of
Missouri Educator Gateway Assessments DRAFT
 Missouri Educator Gateway Assessments FIELD 023: MATHEMATICS January 2014 DRAFT Content Domain Range of Competencies Approximate Percentage of Test Score I. Numbers and Quantity 0001 0002 14% II. Patterns,
Missouri Educator Gateway Assessments FIELD 023: MATHEMATICS January 2014 DRAFT Content Domain Range of Competencies Approximate Percentage of Test Score I. Numbers and Quantity 0001 0002 14% II. Patterns,
I can translate between a number line graph, an inequality, and interval notation.
 Unit 1: Absolute Value 2 I can translate between a number line graph, an inequality, and interval notation. 2 2 I can translate between absolute value expressions and English statements about numbers on
Unit 1: Absolute Value 2 I can translate between a number line graph, an inequality, and interval notation. 2 2 I can translate between absolute value expressions and English statements about numbers on
1 Roots of polynomials
 CS348a: Computer Graphics Handout #18 Geometric Modeling Original Handout #13 Stanford University Tuesday, 9 November 1993 Original Lecture #5: 14th October 1993 Topics: Polynomials Scribe: Mark P Kust
CS348a: Computer Graphics Handout #18 Geometric Modeling Original Handout #13 Stanford University Tuesday, 9 November 1993 Original Lecture #5: 14th October 1993 Topics: Polynomials Scribe: Mark P Kust
Curves - Foundation of Free-form Surfaces
 Crves - Fondation of Free-form Srfaces Why Not Simply Use a Point Matrix to Represent a Crve? Storage isse and limited resoltion Comptation and transformation Difficlties in calclating the intersections
Crves - Fondation of Free-form Srfaces Why Not Simply Use a Point Matrix to Represent a Crve? Storage isse and limited resoltion Comptation and transformation Difficlties in calclating the intersections
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 7 Interpolation Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey Chapter 7 Interpolation Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Name: ID: Math 233 Exam 1. Page 1
 Page 1 Name: ID: This exam has 20 multiple choice questions, worth 5 points each. You are allowed to use a scientific calculator and a 3 5 inch note card. 1. Which of the following pairs of vectors are
Page 1 Name: ID: This exam has 20 multiple choice questions, worth 5 points each. You are allowed to use a scientific calculator and a 3 5 inch note card. 1. Which of the following pairs of vectors are
Wed. Sept 28th: 1.3 New Functions from Old Functions: o vertical and horizontal shifts o vertical and horizontal stretching and reflecting o
 Homework: Appendix A: 1, 2, 3, 5, 6, 7, 8, 11, 13-33(odd), 34, 37, 38, 44, 45, 49, 51, 56. Appendix B: 3, 6, 7, 9, 11, 14, 16-21, 24, 29, 33, 36, 37, 42. Appendix D: 1, 2, 4, 9, 11-20, 23, 26, 28, 29,
Homework: Appendix A: 1, 2, 3, 5, 6, 7, 8, 11, 13-33(odd), 34, 37, 38, 44, 45, 49, 51, 56. Appendix B: 3, 6, 7, 9, 11, 14, 16-21, 24, 29, 33, 36, 37, 42. Appendix D: 1, 2, 4, 9, 11-20, 23, 26, 28, 29,
Identify the graph of a function, and obtain information from or about the graph of a function.
 PS 1 Graphs: Graph equations using rectangular coordinates and graphing utilities, find intercepts, discuss symmetry, graph key equations, solve equations using a graphing utility, work with lines and
PS 1 Graphs: Graph equations using rectangular coordinates and graphing utilities, find intercepts, discuss symmetry, graph key equations, solve equations using a graphing utility, work with lines and
Academic Content Standard MATHEMATICS. MA 51 Advanced Placement Calculus BC
 Academic Content Standard MATHEMATICS MA 51 Advanced Placement Calculus BC Course #: MA 51 Grade Level: High School Course Name: Advanced Placement Calculus BC Level of Difficulty: High Prerequisites:
Academic Content Standard MATHEMATICS MA 51 Advanced Placement Calculus BC Course #: MA 51 Grade Level: High School Course Name: Advanced Placement Calculus BC Level of Difficulty: High Prerequisites: