Linear Convolution Using FFT
|
|
|
- Brett Spencer
- 5 years ago
- Views:
Transcription
1 Linear Convolution Using FFT Another useful property is that we can perform circular convolution and see how many points remain the same as those of linear convolution. When P < L and an L-point circular convolution is performed, the first (P1) points are corrupted by circulation. The remaining points (ie. The last LP+1 points) are not corrupted (i.e., they remain the same as the linear convolution result). See below
2 Linear Convolution Using FFT If xx 1 [nn] is lengh-l and xx 2 [nn] is lengh-p, P<L. Perform L-point circular convolution, So, if nn PP, That is, the result is the same as linear convolution when nn PP. ) 0 for ] [ (because ] ) mod [( ] [ ] ) mod [( ] [ ] [ ] [ ] [ P m m x L m n m x x N m n m x x n x n x n x P m L m > = = = = = = ] [ ] [ ] [ ] [ m n m x x n x n x L m = =
3 Overlapping-save method (for implementing an FIR filter) In sum, when performing L-point circular convolution: if an L-point sequence is circularly convolved with a P-point sequence (P<L), the first (P1) points of the result are incorrect, while the remaining points are identical to those that obtained by linear convolution.
4 Overlapping-save method (for implementing an FIR filter) Separating x[n] as overlapping segments of length L, so that each segment overlaps the preceding section by (P1) points. The r-th segment is [ n] = x[ n + r( L P + 1) P + 1], 0 n L 1 x r Perform circular convolution for each segment, then remove the first (P-1) points obtained.
5 Example of overlapping-save method Decompose x[n] into overlapping sections of length L
6 Example of overlapping-save method (continue) Result of circularly convolving each section with h[n]. The portions of each filter section to be discarded in forming the linear convolution are indicated
7 Discrete-time Systems A transformation or operator that maps an input sequence with values x[n] into an output sequence with value y[n]. y[n] = T{x[n]} x[n] T{ } y[n]
8 Linear System A linear system is referred to as a system y[n]=t{x[n]} satisfying the following property for all α, β. A linear system employing only the current and finite previous inputs is referred to as a kind of (Finite Impulse Response) FIR system or FIR filter. General form:
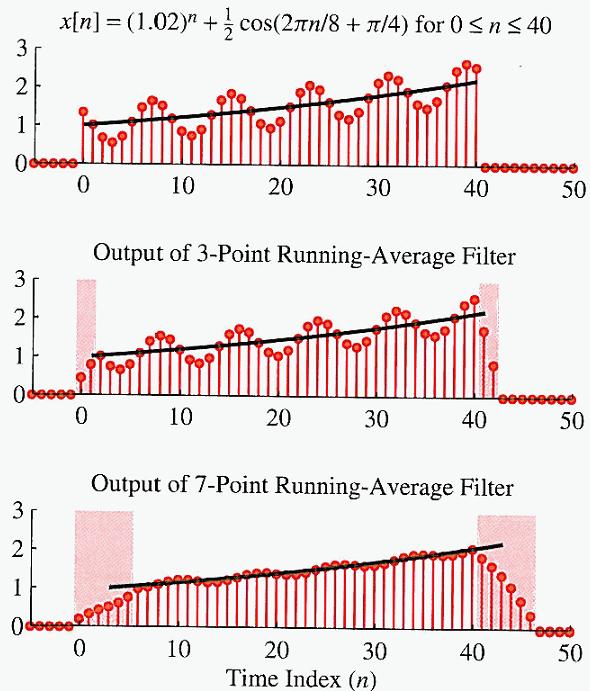
9 Example: running average filters 3-point running average filter: 7-point running average filter
10
![Time-invariant System time-invariant system is referred to a system y[n]=t{x[n]} satisfying for all](/docs-images/84/89723230/images/11-0.jpg "n 0. That is, when the input is delayed (shifted) by n 0, the output is delayed by the same amount.")
11 Time-invariant System time-invariant system is referred to a system y[n]=t{x[n]} satisfying for all n 0. That is, when the input is delayed (shifted) by n 0, the output is delayed by the same amount.
12 Linear Time-invariant (LTI) System It can be easily verified that the FIR filter of the form is a time-invariant system. A system that is both linear and time-invariant is referred to as an LTI system. So, FIR filter is an LTI system.
13 IIR System or IIR Filter IIR filter: Linear system using both current and finite previous inputs as well as previous outputs. General form: Recursion: In IIR filter, previous outputs have been used recursively.

14 General form of LTI system It can be easily verified that IIR filter is also an LTI system. We have the definition of LTI system, but what is the general form of an LTI system? To answer this question, let us investigate what happens when we input the simplest signal, the delta function, into an LTI system. Recall: delta function (unit impulse) in discrete-time domain:
15 Impulse Response When taking the unit impulse δ[n] as input to an LTI system, the output h[n] is called the impulse response of this LTI system. Recall: Any discrete-time signal x[n] can be represented as the linear combination of delayed unit-impulse functions: x [ n] = x[ k] δ [ n k] k =
16 Impulse Response Then, we have the following property for the impulse response of an LTI system: So y = [ ] [ ] [ ] n k= = T x [ ] { [ ]} k k= T yn [ ] = xk hn k k= x δ n k δ n k k [ ] [ ] by Linearity by Timeinvariance
17 Impulse Response yn [ ] = xk hn k k= [ ] [ ] The operation is convolution. Hence, when we know the impulse response h[n] of a linear system, then the output signal can be completely determined by the input signal and the impulse response via the convolution. Knowing an LTI system equivalent to Knowing its impulse response
18 Property Response of LTI System yn [ ] = xn [ ] hn [ ] = x k h nk k= [ ] [ ] Output of an LTI system is the convolution of the input sequence and the impulse response of the LTI system. Convolution is commutative and associative:


19 Equivalent Systems Hence, we have the following equivalent systems:
20 Equivalent Systems x[n] h 1 [n] h 2 [n] h 3 [n] y[n] x[n] h 1 [n] h 2 [n] h 3 [n] y[n]
21 Convolution and Equivalent System Property Convolution is also distributive over addition: x[n] (h 1 [n] + h 2 [n]) = x[n] h 1 [n] + x[n] h 2 [n].
22 Impulse Responses of Some LTI Systems Ideal delay: h[n] = δ[n-n d ] Moving average Accumulator h [ n] h [ n] 1 = M1 + M n 0 = 0 otherwise Forward difference: h[n] = δ[n+1]δ[n] Backward difference: h[n] = δ[n]δ[n1] M 1 n M otherwise 2
23 An LTI system can be realized in different ways by separating it into different subsystems. The following systems are equivalent: Cascading Systems [ ] [ ] [ ] ( ) [ ] [ ] [ ] [ ] ( ) [ ] [ ] = + = + = n n n n n n n n n h δ δ δ δ δ δ δ δ
24 Equivalent Cascading Systems Another example of cascading systems inverse system. h [ n] = u[ n] ( δ [ n] δ [ n 1] ) = u[ n] u[ n 1] = δ [ n]
25 Causality A system is causal if it does not dependent on future inputs. That is, if x 1 [n]=x 2 [n] when n<n 0, then the output y 1 [n]=y 2 [n] when n<n 0 for all n 0. or equivalently, the output y[n 0 ] depends only the input sequence values for n n 0. What is the property of the impulse response of a causal system? Property: An LTI system is causal if and only if h[n] = 0 for all n < 0.
26 General Form of LTI Systems General LTI System Causal LTI System FIR Filter (namely, Finite Impulse Response) yn [ ] = hk xn k k= k= 0 [ ] [ ] yn [ ] = hk xn k M k= 0 [ ] [ ] yn [ ] = hk xn k [ ] [ ] IIR Filter (namely, Infinite Impulse Response) M = + [ ] [ ] [ ] [ ] y[ n] a k x n k b k y n k k= 0 k= 1 N
27 Difference Equation From the above, we can find that both FIR and IIR filters are causal LTI Systems. They are both difference equations. Difference equation: (variables are functions. y: unknown function; x: given) N k = 0 a k y [ n k] = b [ ] mx n m m= 0 Both FIR and IIR filters are solutions of difference equations. IIR filter is the case when a 0 =1. Difference equation is merely a more general form. M
28 Illustration: (infinite-long) Matrix Vector A General LTI system is of the form: yn [ ] = hk xn k k= [ ] [ ] Can be explained as a infinite-dimensional matrix/vector product y[ 3] h[0] h[ 1] h[ 2] h[ 3] h[ 4] h[ 5] x[ 3] y[ 2] h[1] h[0] h[ 1] h[ 2] h[ 3] h[ 4] x[ 2] y[ 1] h[2] h[1] h[0] h[ 1] h[ 2] h[ 3] = x[ 1] y[0] h[3] h[2] h[1] h[0] h[ 1] h[ 2] x[0] y[1] h[4] h[3] h[2] h[1] h[0] h[ 1] x[1] y[2] h[5] h[4] h[3] h[2] h[1] h[0] x[2]
29 What Happens in Frequency Domain? What is the influence in Frequency domain when input a discrete-time signal x[n] to an LTI system of impulse response h[n]? To investigate the influence, consider that an LTI system can be characterized by an infinitedimensional matrix as illustrated above. Conceptually, this matrix should have infinitelong eigenvectors. Eigen function: A discrete-time signal is called eigenfunction if it satisfies the following property: When applying it as input to a system, the output is the same function multiplied by a (complex) constant, i.e., eigenvalue.
30 Eigenfunction of LTI System Property: x[n] = e jwn is the eigenfunction of all LTI systems (w R) Pf: Let h[n] be the impulse response of an LTI system, when e jwn is applied as the input, y [ ] [ ] jw( nk ) jwn n = h k e = e h[ k] k = k = e jwk Let H ( ) jw e = h[ k] k = e jwk we can see [ ] ( ) n H e jw e jwn y =
31 Frequency Response Hence, e jwn is the eigenfunction of the LTI system; The associated eigenvalue is H(e jw ). We call H(e jw ) the LTI system s frequency response The frequency response is a complex function consisting of the real and imaginary parts, H(e jw ) = H R (e jw ) + jh I (e jw ) Physical meaning: When input is a signal with frequency w (i.e., e jwn )), the output is a signal of the same frequency w, but the magnitude and phase could be changed (characterized by the complex amplitude H(e jw ))
32 Frequency Response Another explanation of frequency response Recall the discrete-time Fourier transform (DTFT) pair: Forward DTFT Inverse DTFT
33 Frequency Response By definition, the frequency response: H ( ) jw e = h[ k] k = is just the DTFT of the impulse response h[n]. e jwk Impulse Response DTFT Inverse DTFT Frequency Response This is an important reason why we need DTFT for discrete-time signal analysis, besides the use of continuous Fourier transform.
34 LTI System and Frequency Response Now, let s go back to the problem: When input a signal x[n] to an LTI system, what happens in the frequency domain? Remember that the output of an LTI system is y[n]=x[n]*h[n], the convolution of x[n] and h[n]. In DTFT, we still have the convolution theorem: time domain convolution is equivalent to frequency domain multiplication. Hence, the output in the frequency domain is the multiplication, Y(e jw ) = X(e jw )H(e jw )
35 Multiplication in Frequency Domain In sum, the output sequence s spectrum is the multiplication of the input spectrum and the frequency response. Knowing an LTI system equivalent to equivalent to Knowing its frequency response Knowing its impulse response equivalent to
36 Application Example of Eigenfunctions Sinusoidal responses of LTI systems: A jφ jw A 0n jφ x n = Acos w0n + φ = e e + e e 2 2 [ ] ( ) jw n x [ n] x [ n] 0 + The response of x 1 [n] and x 2 [n] are [ ] ( jw = )( ) y1 n H e A/2 e 0 0 [ ] ( jw = )( ) y2 n H e A/2 e j( w n+ϕ ) j( w n+ϕ ) 0 0 The total response is y[n] = y 1 [n] + y 2 [n] 1 2
37 Example: Frequency Response of the Moving-average System Impulse response of the moving-average system is h [ n] = M M Therefore, the frequency response is 2 M 1 n otherwise M 2 H e [ ] 2 jw 1 = M 1 + M M n=m e 1 jwn
38 The following is the geometric series formula: So Geometric Series Formula 0 1, 1 m m n k n k k n k n m m n α α α α α α = = + = = > 1 0 1, 1 L L k k α α α + = =
39 Frequency Response of the Movingaverage System jw 1 H e = M + M + 1 = = = jwm1 1 e e M + M + 1 1e 2 1 ( 1) 2 ( + + ) ( + + ) 1 e e M + M + 1 1e jw M M 1 /2 jw M M 1 / ( + + ) ( + + ) 1 e e M + M + 1 e e M n=m jw M + jw e jwn jw jw M M 1 /2 jw M M 1 / jw/2 jw/2 e e ( M ) jw M + 1 /2 2 1 ( M ) jw M 2 1 /2
40 Further evaluation Frequency Response of the Movingaverage System 1 2 ( jw ) 1 2 jw ( ) ( + + ) ( + + ) jw 1 e e H e = M + M + 1 e e = = exp j H e jw M M 1 /2 jw M M 1 / ( + M + ) [ ] jw/2 jw/2 1 sin w M 1 / 2 e M + M + 1 sin w/ 2 H e ( M ) 1 2 jw M /2 2 1 e ( M ) jw M 2 1 /2 (magnitude and phase)
41 Spectrum of the Moving-average System (M 1 = 0 and M 2 = 4) Recall that, in DTFT, the frequency response is repeated with period 2π. High frequency is close to ±π. Amplitude response Phase response
42 Example: Discrete-time Ideal Low-pass Filter Ideal low-pass filter in DTFT domain H lowpass jw ( e ) 1, w < wc = 0, wc < w < π Note that we usually depict the frequency response in the range [-π,π] only, and bearing in mind that the spectrum is repeated with the period 2π.
43 Ideal Low-pass Filter in DTFT domain
44 Discrete-time Ideal Low-pass Filter The impulse response h lowpass [n] can be found by inverse Fourier transform: 1 wc jwn hlowpass[ n] = e dw 2π wc 1 jwn w 1 c jwcn jwcn = e w = ( e e ) c 2π jn 2π jn = sin wn c π n Uniform samples of Sinc function
45 Approximation of Discrete-time Ideal Low-pass Filter In other words, the forward DTFT of the sampled sync function recovers the ideal low-pass filter: jw sin wn c Hlowpass( e ) = e π n n= However, as analyzed before, the sampled sync function cannot be realized by difference equation because it reaches infinity on both ends. To approximate the ideal low-pass filter, a method is to use the partial sum instead M jw sin wn c HM ( e ) = e π n n=m jwn jwn
46 Approximation of Discrete-time Ideal Low-pass Filter Examples of M=1, 3, 7, 19
47 Ideal Frequency-selective Filters The low frequencies are frequencies close to zero, while the high frequencies are those close to ±π. Since that the frequencies differing by an integer multiple of 2π are indistinguishable, the low frequency are those that are close to an even multiple of π, while the high frequencies are those close to an odd multiple of π. Ideal frequency-selective filters: An important class of linear-invariant systems includes those systems for which the frequency response is unity over a certain range of frequencies and is zero at the remaining frequencies.
48 Frequency Response of Ideal Lowpass Filter
49 Frequency Response of Ideal Highpass Filter
50 Frequency Response of Ideal Bandstop Filter
51 Frequency Response of Ideal Bandpass Filter
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches
 How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
Chap 2. Discrete-Time Signals and Systems
 Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
VU Signal and Image Processing
 052600 VU Signal and Image Processing Torsten Möller + Hrvoje Bogunović + Raphael Sahann torsten.moeller@univie.ac.at hrvoje.bogunovic@meduniwien.ac.at raphael.sahann@univie.ac.at vda.cs.univie.ac.at/teaching/sip/18s/
052600 VU Signal and Image Processing Torsten Möller + Hrvoje Bogunović + Raphael Sahann torsten.moeller@univie.ac.at hrvoje.bogunovic@meduniwien.ac.at raphael.sahann@univie.ac.at vda.cs.univie.ac.at/teaching/sip/18s/
Discrete Time Signals and Systems Time-frequency Analysis. Gloria Menegaz
 Discrete Time Signals and Systems Time-frequency Analysis Gloria Menegaz Time-frequency Analysis Fourier transform (1D and 2D) Reference textbook: Discrete time signal processing, A.W. Oppenheim and R.W.
Discrete Time Signals and Systems Time-frequency Analysis Gloria Menegaz Time-frequency Analysis Fourier transform (1D and 2D) Reference textbook: Discrete time signal processing, A.W. Oppenheim and R.W.
Let H(z) = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )
 = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )") Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
Digital Signal Processing Lecture 4
 Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
2. Typical Discrete-Time Systems All-Pass Systems (5.5) 2.2. Minimum-Phase Systems (5.6) 2.3. Generalized Linear-Phase Systems (5.
 2.2. Minimum-Phase Systems (5.6) 2.3. Generalized Linear-Phase Systems (5.") . Typical Discrete-Time Systems.1. All-Pass Systems (5.5).. Minimum-Phase Systems (5.6).3. Generalized Linear-Phase Systems (5.7) .1. All-Pass Systems An all-pass system is defined as a system which has
. Typical Discrete-Time Systems.1. All-Pass Systems (5.5).. Minimum-Phase Systems (5.6).3. Generalized Linear-Phase Systems (5.7) .1. All-Pass Systems An all-pass system is defined as a system which has
Digital Signal Processing, Homework 1, Spring 2013, Prof. C.D. Chung
 Digital Signal Processing, Homework, Spring 203, Prof. C.D. Chung. (0.5%) Page 99, Problem 2.2 (a) The impulse response h [n] of an LTI system is known to be zero, except in the interval N 0 n N. The input
Digital Signal Processing, Homework, Spring 203, Prof. C.D. Chung. (0.5%) Page 99, Problem 2.2 (a) The impulse response h [n] of an LTI system is known to be zero, except in the interval N 0 n N. The input
Digital Signal Processing:
 Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried
Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried
Chapter 8 The Discrete Fourier Transform
 Chapter 8 The Discrete Fourier Transform Introduction Representation of periodic sequences: the discrete Fourier series Properties of the DFS The Fourier transform of periodic signals Sampling the Fourier
Chapter 8 The Discrete Fourier Transform Introduction Representation of periodic sequences: the discrete Fourier series Properties of the DFS The Fourier transform of periodic signals Sampling the Fourier
! Circular Convolution. " Linear convolution with circular convolution. ! Discrete Fourier Transform. " Linear convolution through circular
 Previously ESE 531: Digital Signal Processing Lec 22: April 18, 2017 Fast Fourier Transform (con t)! Circular Convolution " Linear convolution with circular convolution! Discrete Fourier Transform " Linear
Previously ESE 531: Digital Signal Processing Lec 22: April 18, 2017 Fast Fourier Transform (con t)! Circular Convolution " Linear convolution with circular convolution! Discrete Fourier Transform " Linear
Multidimensional digital signal processing
 PSfrag replacements Two-dimensional discrete signals N 1 A 2-D discrete signal (also N called a sequence or array) is a function 2 defined over thex(n set 1 of, n 2 ordered ) pairs of integers: y(nx 1,
PSfrag replacements Two-dimensional discrete signals N 1 A 2-D discrete signal (also N called a sequence or array) is a function 2 defined over thex(n set 1 of, n 2 ordered ) pairs of integers: y(nx 1,
Responses of Digital Filters Chapter Intended Learning Outcomes:
 Responses of Digital Filters Chapter Intended Learning Outcomes: (i) Understanding the relationships between impulse response, frequency response, difference equation and transfer function in characterizing
Responses of Digital Filters Chapter Intended Learning Outcomes: (i) Understanding the relationships between impulse response, frequency response, difference equation and transfer function in characterizing
Interchange of Filtering and Downsampling/Upsampling
 Interchange of Filtering and Downsampling/Upsampling Downsampling and upsampling are linear systems, but not LTI systems. They cannot be implemented by difference equations, and so we cannot apply z-transform
Interchange of Filtering and Downsampling/Upsampling Downsampling and upsampling are linear systems, but not LTI systems. They cannot be implemented by difference equations, and so we cannot apply z-transform
Discrete Time Fourier Transform (DTFT)
") Discrete Time Fourier Transform (DTFT) 1 Discrete Time Fourier Transform (DTFT) The DTFT is the Fourier transform of choice for analyzing infinite-length signals and systems Useful for conceptual, pencil-and-paper
Discrete Time Fourier Transform (DTFT) 1 Discrete Time Fourier Transform (DTFT) The DTFT is the Fourier transform of choice for analyzing infinite-length signals and systems Useful for conceptual, pencil-and-paper
Review: Continuous Fourier Transform
 Review: Continuous Fourier Transform Review: convolution x t h t = x τ h(t τ)dτ Convolution in time domain Derivation Convolution Property Interchange the order of integrals Let Convolution Property By
Review: Continuous Fourier Transform Review: convolution x t h t = x τ h(t τ)dτ Convolution in time domain Derivation Convolution Property Interchange the order of integrals Let Convolution Property By
Lecture 19 IIR Filters
 Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
# FIR. [ ] = b k. # [ ]x[ n " k] [ ] = h k. x[ n] = Ae j" e j# ˆ n Complex exponential input. [ ]Ae j" e j ˆ. ˆ )Ae j# e j ˆ. y n. y n.
![# FIR. [ ] = b k. # [ ]x[ n k] [ ] = h k. x[ n] = Ae j e j# ˆ n Complex exponential input. [ ]Ae j e j ˆ. ˆ )Ae j# e j ˆ. y n. y n.](/thumbs/88/116624032.jpg "# FIR. [ ] = b k. # [ ]x[ n k] [ ] = h k. x[ n] = Ae j e j# ˆ n Complex exponential input. [ ]Ae j e j ˆ. ˆ )Ae j# e j ˆ. y n. y n.") [ ] = h k M [ ] = b k x[ n " k] FIR k= M [ ]x[ n " k] convolution k= x[ n] = Ae j" e j ˆ n Complex exponential input [ ] = h k M % k= [ ]Ae j" e j ˆ % M = ' h[ k]e " j ˆ & k= k = H (" ˆ )Ae j e j ˆ ( )
[ ] = h k M [ ] = b k x[ n " k] FIR k= M [ ]x[ n " k] convolution k= x[ n] = Ae j" e j ˆ n Complex exponential input [ ] = h k M % k= [ ]Ae j" e j ˆ % M = ' h[ k]e " j ˆ & k= k = H (" ˆ )Ae j e j ˆ ( )
Discrete-time Signals and Systems in
 Discrete-time Signals and Systems in the Frequency Domain Chapter 3, Sections 3.1-39 3.9 Chapter 4, Sections 4.8-4.9 Dr. Iyad Jafar Outline Introduction The Continuous-Time FourierTransform (CTFT) The
Discrete-time Signals and Systems in the Frequency Domain Chapter 3, Sections 3.1-39 3.9 Chapter 4, Sections 4.8-4.9 Dr. Iyad Jafar Outline Introduction The Continuous-Time FourierTransform (CTFT) The
Continuous Fourier transform of a Gaussian Function
 Continuous Fourier transform of a Gaussian Function Gaussian function: e t2 /(2σ 2 ) The CFT of a Gaussian function is also a Gaussian function (i.e., time domain is Gaussian, then the frequency domain
Continuous Fourier transform of a Gaussian Function Gaussian function: e t2 /(2σ 2 ) The CFT of a Gaussian function is also a Gaussian function (i.e., time domain is Gaussian, then the frequency domain
Stability Condition in Terms of the Pole Locations
 Stability Condition in Terms of the Pole Locations A causal LTI digital filter is BIBO stable if and only if its impulse response h[n] is absolutely summable, i.e., 1 = S h [ n] < n= We now develop a stability
Stability Condition in Terms of the Pole Locations A causal LTI digital filter is BIBO stable if and only if its impulse response h[n] is absolutely summable, i.e., 1 = S h [ n] < n= We now develop a stability
8 The Discrete Fourier Transform (DFT)
") 8 The Discrete Fourier Transform (DFT) ² Discrete-Time Fourier Transform and Z-transform are de ned over in niteduration sequence. Both transforms are functions of continuous variables (ω and z). For nite-duration
8 The Discrete Fourier Transform (DFT) ² Discrete-Time Fourier Transform and Z-transform are de ned over in niteduration sequence. Both transforms are functions of continuous variables (ω and z). For nite-duration
Z-Transform. x (n) Sampler
 Sampler") Chapter Two A- Discrete Time Signals: The discrete time signal x(n) is obtained by taking samples of the analog signal xa (t) every Ts seconds as shown in Figure below. Analog signal Discrete time signal
Chapter Two A- Discrete Time Signals: The discrete time signal x(n) is obtained by taking samples of the analog signal xa (t) every Ts seconds as shown in Figure below. Analog signal Discrete time signal
VII. Discrete Fourier Transform (DFT) Chapter-8. A. Modulo Arithmetic. (n) N is n modulo N, n is an integer variable.
 Chapter-8. A. Modulo Arithmetic. (n) N is n modulo N, n is an integer variable.") 1 VII. Discrete Fourier Transform (DFT) Chapter-8 A. Modulo Arithmetic (n) N is n modulo N, n is an integer variable. (n) N = n m N 0 n m N N-1, pick m Ex. (k) 4 W N = e -j2π/n 2 Note that W N k = 0 but
1 VII. Discrete Fourier Transform (DFT) Chapter-8 A. Modulo Arithmetic (n) N is n modulo N, n is an integer variable. (n) N = n m N 0 n m N N-1, pick m Ex. (k) 4 W N = e -j2π/n 2 Note that W N k = 0 but
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A
 DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
III. Time Domain Analysis of systems
 1 III. Time Domain Analysis of systems Here, we adapt properties of continuous time systems to discrete time systems Section 2.2-2.5, pp 17-39 System Notation y(n) = T[ x(n) ] A. Types of Systems Memoryless
1 III. Time Domain Analysis of systems Here, we adapt properties of continuous time systems to discrete time systems Section 2.2-2.5, pp 17-39 System Notation y(n) = T[ x(n) ] A. Types of Systems Memoryless
Module 3. Convolution. Aim
 Module Convolution Digital Signal Processing. Slide 4. Aim How to perform convolution in real-time systems efficiently? Is convolution in time domain equivalent to multiplication of the transformed sequence?
Module Convolution Digital Signal Processing. Slide 4. Aim How to perform convolution in real-time systems efficiently? Is convolution in time domain equivalent to multiplication of the transformed sequence?
EEL3135: Homework #4
 EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
IT DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A
 UNIT-1 SIGNALS AND SYSTEMS PART-A") DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING IT6502 - DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A 1. What is a continuous and discrete time signal? Continuous
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING IT6502 - DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A 1. What is a continuous and discrete time signal? Continuous
/ (2π) X(e jω ) dω. 4. An 8 point sequence is given by x(n) = {2,2,2,2,1,1,1,1}. Compute 8 point DFT of x(n) by
 X(e jω ) dω. 4. An 8 point sequence is given by x(n) = {2,2,2,2,1,1,1,1}. Compute 8 point DFT of x(n) by") Code No: RR320402 Set No. 1 III B.Tech II Semester Regular Examinations, Apr/May 2006 DIGITAL SIGNAL PROCESSING ( Common to Electronics & Communication Engineering, Electronics & Instrumentation Engineering,
Code No: RR320402 Set No. 1 III B.Tech II Semester Regular Examinations, Apr/May 2006 DIGITAL SIGNAL PROCESSING ( Common to Electronics & Communication Engineering, Electronics & Instrumentation Engineering,
Computer Engineering 4TL4: Digital Signal Processing
 Computer Engineering 4TL4: Digital Signal Processing Day Class Instructor: Dr. I. C. BRUCE Duration of Examination: 3 Hours McMaster University Final Examination December, 2003 This examination paper includes
Computer Engineering 4TL4: Digital Signal Processing Day Class Instructor: Dr. I. C. BRUCE Duration of Examination: 3 Hours McMaster University Final Examination December, 2003 This examination paper includes
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE)
") QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
Discrete-Time Fourier Transform
 C H A P T E R 7 Discrete-Time Fourier Transform In Chapter 3 and Appendix C, we showed that interesting continuous-time waveforms x(t) can be synthesized by summing sinusoids, or complex exponential signals,
C H A P T E R 7 Discrete-Time Fourier Transform In Chapter 3 and Appendix C, we showed that interesting continuous-time waveforms x(t) can be synthesized by summing sinusoids, or complex exponential signals,
Lecture 11 FIR Filters
 Lecture 11 FIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/4/12 1 The Unit Impulse Sequence Any sequence can be represented in this way. The equation is true if k ranges
Lecture 11 FIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/4/12 1 The Unit Impulse Sequence Any sequence can be represented in this way. The equation is true if k ranges
The Discrete-Time Fourier
 Chapter 3 The Discrete-Time Fourier Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 3-1-1 Continuous-Time Fourier Transform Definition The CTFT of
Chapter 3 The Discrete-Time Fourier Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 3-1-1 Continuous-Time Fourier Transform Definition The CTFT of
Digital Signal Processing. Midterm 2 Solutions
 EE 123 University of California, Berkeley Anant Sahai arch 15, 2007 Digital Signal Processing Instructions idterm 2 Solutions Total time allowed for the exam is 80 minutes Please write your name and SID
EE 123 University of California, Berkeley Anant Sahai arch 15, 2007 Digital Signal Processing Instructions idterm 2 Solutions Total time allowed for the exam is 80 minutes Please write your name and SID
Digital Signal Processing Lecture 3 - Discrete-Time Systems
 Digital Signal Processing - Discrete-Time Systems Electrical Engineering and Computer Science University of Tennessee, Knoxville August 25, 2015 Overview 1 2 3 4 5 6 7 8 Introduction Three components of
Digital Signal Processing - Discrete-Time Systems Electrical Engineering and Computer Science University of Tennessee, Knoxville August 25, 2015 Overview 1 2 3 4 5 6 7 8 Introduction Three components of
E : Lecture 1 Introduction
 E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Discrete Time Fourier Transform M. Lustig, EECS UC Berkeley A couple of things Read Ch 2 2.0-2.9 It s OK to use 2nd edition Class webcast in bcourses.berkeley.edu or linked
EE123 Digital Signal Processing Discrete Time Fourier Transform M. Lustig, EECS UC Berkeley A couple of things Read Ch 2 2.0-2.9 It s OK to use 2nd edition Class webcast in bcourses.berkeley.edu or linked
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 2B D. T. Fourier Transform M. Lustig, EECS UC Berkeley Something Fun gotenna http://www.gotenna.com/# Text messaging radio Bluetooth phone interface MURS VHF radio
EE123 Digital Signal Processing Lecture 2B D. T. Fourier Transform M. Lustig, EECS UC Berkeley Something Fun gotenna http://www.gotenna.com/# Text messaging radio Bluetooth phone interface MURS VHF radio
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 3 Signals & Systems Prof. ark Fowler Note Set #28 D-T Systems: DT Filters Ideal & Practical /4 Ideal D-T Filters Just as in the CT case we can specify filters. We looked at the ideal filter for the
EECE 3 Signals & Systems Prof. ark Fowler Note Set #28 D-T Systems: DT Filters Ideal & Practical /4 Ideal D-T Filters Just as in the CT case we can specify filters. We looked at the ideal filter for the
Analog vs. discrete signals
 Analog vs. discrete signals Continuous-time signals are also known as analog signals because their amplitude is analogous (i.e., proportional) to the physical quantity they represent. Discrete-time signals
Analog vs. discrete signals Continuous-time signals are also known as analog signals because their amplitude is analogous (i.e., proportional) to the physical quantity they represent. Discrete-time signals
Digital Filters Ying Sun
 Digital Filters Ying Sun Digital filters Finite impulse response (FIR filter: h[n] has a finite numbers of terms. Infinite impulse response (IIR filter: h[n] has infinite numbers of terms. Causal filter:
Digital Filters Ying Sun Digital filters Finite impulse response (FIR filter: h[n] has a finite numbers of terms. Infinite impulse response (IIR filter: h[n] has infinite numbers of terms. Causal filter:
Transform analysis of LTI systems Oppenheim and Schafer, Second edition pp For LTI systems we can write
 Transform analysis of LTI systems Oppenheim and Schafer, Second edition pp. 4 9. For LTI systems we can write yœn D xœn hœn D X kd xœkhœn Alternatively, this relationship can be expressed in the z-transform
Transform analysis of LTI systems Oppenheim and Schafer, Second edition pp. 4 9. For LTI systems we can write yœn D xœn hœn D X kd xœkhœn Alternatively, this relationship can be expressed in the z-transform
! Review: Discrete Fourier Transform (DFT) ! DFT Properties. " Duality. " Circular Shift. ! Circular Convolution. ! Fast Convolution Methods
 ! DFT Properties. Duality. Circular Shift. ! Circular Convolution. ! Fast Convolution Methods") Toda ESE 531: Digital Signal Processing! Review: Discrete Fourier Transform (DFT)! DFT Properties Lec 20: April 11, 2017 Discrete Fourier Transform, Pt 2 " Dualit " Circular Shift! Circular Convolution!
Toda ESE 531: Digital Signal Processing! Review: Discrete Fourier Transform (DFT)! DFT Properties Lec 20: April 11, 2017 Discrete Fourier Transform, Pt 2 " Dualit " Circular Shift! Circular Convolution!
LAB 6: FIR Filter Design Summer 2011
 University of Illinois at Urbana-Champaign Department of Electrical and Computer Engineering ECE 311: Digital Signal Processing Lab Chandra Radhakrishnan Peter Kairouz LAB 6: FIR Filter Design Summer 011
University of Illinois at Urbana-Champaign Department of Electrical and Computer Engineering ECE 311: Digital Signal Processing Lab Chandra Radhakrishnan Peter Kairouz LAB 6: FIR Filter Design Summer 011
Examples. 2-input, 1-output discrete-time systems: 1-input, 1-output discrete-time systems:
 Discrete-Time s - I Time-Domain Representation CHAPTER 4 These lecture slides are based on "Digital Signal Processing: A Computer-Based Approach, 4th ed." textbook by S.K. Mitra and its instructor materials.
Discrete-Time s - I Time-Domain Representation CHAPTER 4 These lecture slides are based on "Digital Signal Processing: A Computer-Based Approach, 4th ed." textbook by S.K. Mitra and its instructor materials.
INF3440/INF4440. Design of digital filters
 Last week lecture Today s lecture: Chapter 8.1-8.3, 8.4.2, 8.5.3 INF3440/INF4440. Design of digital filters October 2004 Last week lecture Today s lecture: Chapter 8.1-8.3, 8.4.2, 8.5.3 Last lectures:
Last week lecture Today s lecture: Chapter 8.1-8.3, 8.4.2, 8.5.3 INF3440/INF4440. Design of digital filters October 2004 Last week lecture Today s lecture: Chapter 8.1-8.3, 8.4.2, 8.5.3 Last lectures:
z-transforms Definition of the z-transform Chapter
 z-transforms Chapter 7 In the study of discrete-time signal and systems, we have thus far considered the time-domain and the frequency domain. The z- domain gives us a third representation. All three domains
z-transforms Chapter 7 In the study of discrete-time signal and systems, we have thus far considered the time-domain and the frequency domain. The z- domain gives us a third representation. All three domains
Discrete-Time Systems
 FIR Filters With this chapter we turn to systems as opposed to signals. The systems discussed in this chapter are finite impulse response (FIR) digital filters. The term digital filter arises because these
FIR Filters With this chapter we turn to systems as opposed to signals. The systems discussed in this chapter are finite impulse response (FIR) digital filters. The term digital filter arises because these
Fourier Series Representation of
 Fourier Series Representation of Periodic Signals Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline The response of LIT system
Fourier Series Representation of Periodic Signals Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline The response of LIT system
Convolution. Define a mathematical operation on discrete-time signals called convolution, represented by *. Given two discrete-time signals x 1, x 2,
 Filters Filters So far: Sound signals, connection to Fourier Series, Introduction to Fourier Series and Transforms, Introduction to the FFT Today Filters Filters: Keep part of the signal we are interested
Filters Filters So far: Sound signals, connection to Fourier Series, Introduction to Fourier Series and Transforms, Introduction to the FFT Today Filters Filters: Keep part of the signal we are interested
ECSE 512 Digital Signal Processing I Fall 2010 FINAL EXAMINATION
 FINAL EXAMINATION 9:00 am 12:00 pm, December 20, 2010 Duration: 180 minutes Examiner: Prof. M. Vu Assoc. Examiner: Prof. B. Champagne There are 6 questions for a total of 120 points. This is a closed book
FINAL EXAMINATION 9:00 am 12:00 pm, December 20, 2010 Duration: 180 minutes Examiner: Prof. M. Vu Assoc. Examiner: Prof. B. Champagne There are 6 questions for a total of 120 points. This is a closed book
ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM. Dr. Lim Chee Chin
 ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM Dr. Lim Chee Chin Outline Introduction Discrete Fourier Series Properties of Discrete Fourier Series Time domain aliasing due to frequency
ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM Dr. Lim Chee Chin Outline Introduction Discrete Fourier Series Properties of Discrete Fourier Series Time domain aliasing due to frequency
Digital Signal Processing. Midterm 1 Solution
 EE 123 University of California, Berkeley Anant Sahai February 15, 27 Digital Signal Processing Instructions Midterm 1 Solution Total time allowed for the exam is 8 minutes Some useful formulas: Discrete
EE 123 University of California, Berkeley Anant Sahai February 15, 27 Digital Signal Processing Instructions Midterm 1 Solution Total time allowed for the exam is 8 minutes Some useful formulas: Discrete
Review of Fundamentals of Digital Signal Processing
 Chapter 2 Review of Fundamentals of Digital Signal Processing 2.1 (a) This system is not linear (the constant term makes it non linear) but is shift-invariant (b) This system is linear but not shift-invariant
Chapter 2 Review of Fundamentals of Digital Signal Processing 2.1 (a) This system is not linear (the constant term makes it non linear) but is shift-invariant (b) This system is linear but not shift-invariant
Discrete-Time Signals & Systems
 Chapter 2 Discrete-Time Signals & Systems 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 2-1-1 Discrete-Time Signals: Time-Domain Representation (1/10) Signals
Chapter 2 Discrete-Time Signals & Systems 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 2-1-1 Discrete-Time Signals: Time-Domain Representation (1/10) Signals
Digital Signal Processing Lecture 5
 Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 5 Begüm Demir E-mail:
Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 5 Begüm Demir E-mail:
ECE 308 Discrete-Time Signals and Systems
 ECE 38-6 ECE 38 Discrete-Time Signals and Systems Z. Aliyazicioglu Electrical and Computer Engineering Department Cal Poly Pomona ECE 38-6 1 Intoduction Two basic methods for analyzing the response of
ECE 38-6 ECE 38 Discrete-Time Signals and Systems Z. Aliyazicioglu Electrical and Computer Engineering Department Cal Poly Pomona ECE 38-6 1 Intoduction Two basic methods for analyzing the response of
Therefore the new Fourier coefficients are. Module 2 : Signals in Frequency Domain Problem Set 2. Problem 1
 Module 2 : Signals in Frequency Domain Problem Set 2 Problem 1 Let be a periodic signal with fundamental period T and Fourier series coefficients. Derive the Fourier series coefficients of each of the
Module 2 : Signals in Frequency Domain Problem Set 2 Problem 1 Let be a periodic signal with fundamental period T and Fourier series coefficients. Derive the Fourier series coefficients of each of the
3.2 Complex Sinusoids and Frequency Response of LTI Systems
 3. Introduction. A signal can be represented as a weighted superposition of complex sinusoids. x(t) or x[n]. LTI system: LTI System Output = A weighted superposition of the system response to each complex
3. Introduction. A signal can be represented as a weighted superposition of complex sinusoids. x(t) or x[n]. LTI system: LTI System Output = A weighted superposition of the system response to each complex
ELEN E4810: Digital Signal Processing Topic 2: Time domain
 ELEN E4810: Digital Signal Processing Topic 2: Time domain 1. Discrete-time systems 2. Convolution 3. Linear Constant-Coefficient Difference Equations (LCCDEs) 4. Correlation 1 1. Discrete-time systems
ELEN E4810: Digital Signal Processing Topic 2: Time domain 1. Discrete-time systems 2. Convolution 3. Linear Constant-Coefficient Difference Equations (LCCDEs) 4. Correlation 1 1. Discrete-time systems
Discrete-Time Fourier Transform
 Discrete-Time Fourier Transform Chapter Intended Learning Outcomes: (i) (ii) (iii) Represent discrete-time signals using discrete-time Fourier transform Understand the properties of discrete-time Fourier
Discrete-Time Fourier Transform Chapter Intended Learning Outcomes: (i) (ii) (iii) Represent discrete-time signals using discrete-time Fourier transform Understand the properties of discrete-time Fourier
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 2A D.T Systems D. T. Fourier Transform A couple of things Read Ch 2 2.0-2.9 It s OK to use 2nd edition My office hours: posted on-line W 4-5pm Cory 506 ham radio
EE123 Digital Signal Processing Lecture 2A D.T Systems D. T. Fourier Transform A couple of things Read Ch 2 2.0-2.9 It s OK to use 2nd edition My office hours: posted on-line W 4-5pm Cory 506 ham radio
UNIT 1. SIGNALS AND SYSTEM
 Page no: 1 UNIT 1. SIGNALS AND SYSTEM INTRODUCTION A SIGNAL is defined as any physical quantity that changes with time, distance, speed, position, pressure, temperature or some other quantity. A SIGNAL
Page no: 1 UNIT 1. SIGNALS AND SYSTEM INTRODUCTION A SIGNAL is defined as any physical quantity that changes with time, distance, speed, position, pressure, temperature or some other quantity. A SIGNAL
MAHALAKSHMI ENGINEERING COLLEGE-TRICHY
 DIGITAL SIGNAL PROCESSING DEPT./SEM.: ECE&EEE /V DISCRETE FOURIER TRANFORM AND FFT PART-A 1. Define DFT of a discrete time sequence? AUC MAY 06 The DFT is used to convert a finite discrete time sequence
DIGITAL SIGNAL PROCESSING DEPT./SEM.: ECE&EEE /V DISCRETE FOURIER TRANFORM AND FFT PART-A 1. Define DFT of a discrete time sequence? AUC MAY 06 The DFT is used to convert a finite discrete time sequence
EE482: Digital Signal Processing Applications
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 02 DSP Fundamentals 14/01/21 http://www.ee.unlv.edu/~b1morris/ee482/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 02 DSP Fundamentals 14/01/21 http://www.ee.unlv.edu/~b1morris/ee482/
Digital Signal Processing I Final Exam Fall 2008 ECE Dec Cover Sheet
 Digital Signal Processing I Final Exam Fall 8 ECE538 7 Dec.. 8 Cover Sheet Test Duration: minutes. Open Book but Closed Notes. Calculators NOT allowed. This test contains FIVE problems. All work should
Digital Signal Processing I Final Exam Fall 8 ECE538 7 Dec.. 8 Cover Sheet Test Duration: minutes. Open Book but Closed Notes. Calculators NOT allowed. This test contains FIVE problems. All work should
ECE-314 Fall 2012 Review Questions for Midterm Examination II
 ECE-314 Fall 2012 Review Questions for Midterm Examination II First, make sure you study all the problems and their solutions from homework sets 4-7. Then work on the following additional problems. Problem
ECE-314 Fall 2012 Review Questions for Midterm Examination II First, make sure you study all the problems and their solutions from homework sets 4-7. Then work on the following additional problems. Problem
Discrete Fourier Transform
 Discrete Fourier Transform Virtually all practical signals have finite length (e.g., sensor data, audio records, digital images, stock values, etc). Rather than considering such signals to be zero-padded
Discrete Fourier Transform Virtually all practical signals have finite length (e.g., sensor data, audio records, digital images, stock values, etc). Rather than considering such signals to be zero-padded
Review of Fundamentals of Digital Signal Processing
 Solution Manual for Theory and Applications of Digital Speech Processing by Lawrence Rabiner and Ronald Schafer Click here to Purchase full Solution Manual at http://solutionmanuals.info Link download
Solution Manual for Theory and Applications of Digital Speech Processing by Lawrence Rabiner and Ronald Schafer Click here to Purchase full Solution Manual at http://solutionmanuals.info Link download
EE 225D LECTURE ON DIGITAL FILTERS. University of California Berkeley
 University of California Berkeley College of Engineering Department of Electrical Engineering and Computer Sciences Professors : N.Morgan / B.Gold EE225D Digital Filters Spring,1999 Lecture 7 N.MORGAN
University of California Berkeley College of Engineering Department of Electrical Engineering and Computer Sciences Professors : N.Morgan / B.Gold EE225D Digital Filters Spring,1999 Lecture 7 N.MORGAN
Fall 2011, EE123 Digital Signal Processing
 Lecture 6 Miki Lustig, UCB September 11, 2012 Miki Lustig, UCB DFT and Sampling the DTFT X (e jω ) = e j4ω sin2 (5ω/2) sin 2 (ω/2) 5 x[n] 25 X(e jω ) 4 20 3 15 2 1 0 10 5 1 0 5 10 15 n 0 0 2 4 6 ω 5 reconstructed
Lecture 6 Miki Lustig, UCB September 11, 2012 Miki Lustig, UCB DFT and Sampling the DTFT X (e jω ) = e j4ω sin2 (5ω/2) sin 2 (ω/2) 5 x[n] 25 X(e jω ) 4 20 3 15 2 1 0 10 5 1 0 5 10 15 n 0 0 2 4 6 ω 5 reconstructed
Very useful for designing and analyzing signal processing systems
 z-transform z-transform The z-transform generalizes the Discrete-Time Fourier Transform (DTFT) for analyzing infinite-length signals and systems Very useful for designing and analyzing signal processing
z-transform z-transform The z-transform generalizes the Discrete-Time Fourier Transform (DTFT) for analyzing infinite-length signals and systems Very useful for designing and analyzing signal processing
DIGITAL SIGNAL PROCESSING
 IT 1252 DIGITAL SIGNAL PROCESSING 1. Define Discrete time signal. A discrete time signal x (n) is a function of an independent variable that is an integer.a discrete time signal is not defined at instant
IT 1252 DIGITAL SIGNAL PROCESSING 1. Define Discrete time signal. A discrete time signal x (n) is a function of an independent variable that is an integer.a discrete time signal is not defined at instant
7.17. Determine the z-transform and ROC for the following time signals: Sketch the ROC, poles, and zeros in the z-plane. X(z) = x[n]z n.
![7.17. Determine the z-transform and ROC for the following time signals: Sketch the ROC, poles, and zeros in the z-plane. X(z) = x[n]z n.](/thumbs/74/70037980.jpg "7.17. Determine the z-transform and ROC for the following time signals: Sketch the ROC, poles, and zeros in the z-plane. X(z) = x[n]z n.") Solutions to Additional Problems 7.7. Determine the -transform and ROC for the following time signals: Sketch the ROC, poles, and eros in the -plane. (a) x[n] δ[n k], k > 0 X() x[n] n n k, 0 Im k multiple
Solutions to Additional Problems 7.7. Determine the -transform and ROC for the following time signals: Sketch the ROC, poles, and eros in the -plane. (a) x[n] δ[n k], k > 0 X() x[n] n n k, 0 Im k multiple
Question Paper Code : AEC11T02
 Hall Ticket No Question Paper Code : AEC11T02 VARDHAMAN COLLEGE OF ENGINEERING (AUTONOMOUS) Affiliated to JNTUH, Hyderabad Four Year B. Tech III Semester Tutorial Question Bank 2013-14 (Regulations: VCE-R11)
Hall Ticket No Question Paper Code : AEC11T02 VARDHAMAN COLLEGE OF ENGINEERING (AUTONOMOUS) Affiliated to JNTUH, Hyderabad Four Year B. Tech III Semester Tutorial Question Bank 2013-14 (Regulations: VCE-R11)
ELEG 305: Digital Signal Processing
 ELEG 305: Digital Signal Processing Lecture 1: Course Overview; Discrete-Time Signals & Systems Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 2008 K. E.
ELEG 305: Digital Signal Processing Lecture 1: Course Overview; Discrete-Time Signals & Systems Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 2008 K. E.
Cosc 3451 Signals and Systems. What is a system? Systems Terminology and Properties of Systems
 Cosc 3451 Signals and Systems Systems Terminology and Properties of Systems What is a system? an entity that manipulates one or more signals to yield new signals (often to accomplish a function) can be
Cosc 3451 Signals and Systems Systems Terminology and Properties of Systems What is a system? an entity that manipulates one or more signals to yield new signals (often to accomplish a function) can be
Lecture 2 Discrete-Time LTI Systems: Introduction
 Lecture 2 Discrete-Time LTI Systems: Introduction Outline 2.1 Classification of Systems.............................. 1 2.1.1 Memoryless................................. 1 2.1.2 Causal....................................
Lecture 2 Discrete-Time LTI Systems: Introduction Outline 2.1 Classification of Systems.............................. 1 2.1.1 Memoryless................................. 1 2.1.2 Causal....................................
Chirp Transform for FFT
 Chirp Transform for FFT Since the FFT is an implementation of the DFT, it provides a frequency resolution of 2π/N, where N is the length of the input sequence. If this resolution is not sufficient in a
Chirp Transform for FFT Since the FFT is an implementation of the DFT, it provides a frequency resolution of 2π/N, where N is the length of the input sequence. If this resolution is not sufficient in a
Chapter 7: Filter Design 7.1 Practical Filter Terminology
 hapter 7: Filter Design 7. Practical Filter Terminology Analog and digital filters and their designs constitute one of the major emphasis areas in signal processing and communication systems. This is due
hapter 7: Filter Design 7. Practical Filter Terminology Analog and digital filters and their designs constitute one of the major emphasis areas in signal processing and communication systems. This is due
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 2 Discrete Time Systems Today Last time: Administration Overview Announcement: HW1 will be out today Lab 0 out webcast out Today: Ch. 2 - Discrete-Time Signals and
EE123 Digital Signal Processing Lecture 2 Discrete Time Systems Today Last time: Administration Overview Announcement: HW1 will be out today Lab 0 out webcast out Today: Ch. 2 - Discrete-Time Signals and
Fourier Transform for Continuous Functions
 Fourier Transform for Continuous Functions Central goal: representing a signal by a set of orthogonal bases that are corresponding to frequencies or spectrum. Fourier series allows to find the spectrum
Fourier Transform for Continuous Functions Central goal: representing a signal by a set of orthogonal bases that are corresponding to frequencies or spectrum. Fourier series allows to find the spectrum
DISCRETE FOURIER TRANSFORM
 DISCRETE FOURIER TRANSFORM 1. Introduction The sampled discrete-time fourier transform (DTFT) of a finite length, discrete-time signal is known as the discrete Fourier transform (DFT). The DFT contains
DISCRETE FOURIER TRANSFORM 1. Introduction The sampled discrete-time fourier transform (DTFT) of a finite length, discrete-time signal is known as the discrete Fourier transform (DFT). The DFT contains
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 22: April 10, 2018 Adaptive Filters Penn ESE 531 Spring 2018 Khanna Lecture Outline! Circular convolution as linear convolution with aliasing! Adaptive Filters Penn
ESE 531: Digital Signal Processing Lec 22: April 10, 2018 Adaptive Filters Penn ESE 531 Spring 2018 Khanna Lecture Outline! Circular convolution as linear convolution with aliasing! Adaptive Filters Penn
A. Relationship of DSP to other Fields.
 1 I. Introduction 8/27/2015 A. Relationship of DSP to other Fields. Common topics to all these fields: transfer function and impulse response, Fourierrelated transforms, convolution theorem. 2 y(t) = h(
1 I. Introduction 8/27/2015 A. Relationship of DSP to other Fields. Common topics to all these fields: transfer function and impulse response, Fourierrelated transforms, convolution theorem. 2 y(t) = h(
Introduction to Digital Signal Processing
 Introduction to Digital Signal Processing 1.1 What is DSP? DSP is a technique of performing the mathematical operations on the signals in digital domain. As real time signals are analog in nature we need
Introduction to Digital Signal Processing 1.1 What is DSP? DSP is a technique of performing the mathematical operations on the signals in digital domain. As real time signals are analog in nature we need
2. CONVOLUTION. Convolution sum. Response of d.t. LTI systems at a certain input signal
 2. CONVOLUTION Convolution sum. Response of d.t. LTI systems at a certain input signal Any signal multiplied by the unit impulse = the unit impulse weighted by the value of the signal in 0: xn [ ] δ [
2. CONVOLUTION Convolution sum. Response of d.t. LTI systems at a certain input signal Any signal multiplied by the unit impulse = the unit impulse weighted by the value of the signal in 0: xn [ ] δ [
EE-210. Signals and Systems Homework 7 Solutions
 EE-20. Signals and Systems Homework 7 Solutions Spring 200 Exercise Due Date th May. Problems Q Let H be the causal system described by the difference equation w[n] = 7 w[n ] 2 2 w[n 2] + x[n ] x[n 2]
EE-20. Signals and Systems Homework 7 Solutions Spring 200 Exercise Due Date th May. Problems Q Let H be the causal system described by the difference equation w[n] = 7 w[n ] 2 2 w[n 2] + x[n ] x[n 2]
Digital Signal Processing
 COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #21 Friday, October 24, 2003 Types of causal FIR (generalized) linear-phase filters: Type I: Symmetric impulse response: with order M an even
COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #21 Friday, October 24, 2003 Types of causal FIR (generalized) linear-phase filters: Type I: Symmetric impulse response: with order M an even
Discrete-Time Signals and Systems
 ECE 46 Lec Viewgraph of 35 Discrete-Time Signals and Systems Sequences: x { x[ n] }, < n
ECE 46 Lec Viewgraph of 35 Discrete-Time Signals and Systems Sequences: x { x[ n] }, < n
Review of Frequency Domain Fourier Series: Continuous periodic frequency components
 Today we will review: Review of Frequency Domain Fourier series why we use it trig form & exponential form how to get coefficients for each form Eigenfunctions what they are how they relate to LTI systems
Today we will review: Review of Frequency Domain Fourier series why we use it trig form & exponential form how to get coefficients for each form Eigenfunctions what they are how they relate to LTI systems
Frequency-Domain C/S of LTI Systems
 Frequency-Domain C/S of LTI Systems x(n) LTI y(n) LTI: Linear Time-Invariant system h(n), the impulse response of an LTI systems describes the time domain c/s. H(ω), the frequency response describes the
Frequency-Domain C/S of LTI Systems x(n) LTI y(n) LTI: Linear Time-Invariant system h(n), the impulse response of an LTI systems describes the time domain c/s. H(ω), the frequency response describes the
Transform Analysis of Linear Time-Invariant Systems
 Transform Analysis of Linear Time-Invariant Systems Discrete-Time Signal Processing Chia-Ping Chen Department of Computer Science and Engineering National Sun Yat-Sen University Kaohsiung, Taiwan ROC Transform
Transform Analysis of Linear Time-Invariant Systems Discrete-Time Signal Processing Chia-Ping Chen Department of Computer Science and Engineering National Sun Yat-Sen University Kaohsiung, Taiwan ROC Transform
HST.582J / 6.555J / J Biomedical Signal and Image Processing Spring 2007
 MIT OpenCourseare http://ocw.mit.edu HST.58J / 6.555J / 16.56J Biomedical Signal and Image Processing Spring 7 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.
MIT OpenCourseare http://ocw.mit.edu HST.58J / 6.555J / 16.56J Biomedical Signal and Image Processing Spring 7 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.
University Question Paper Solution
 Unit 1: Introduction University Question Paper Solution 1. Determine whether the following systems are: i) Memoryless, ii) Stable iii) Causal iv) Linear and v) Time-invariant. i) y(n)= nx(n) ii) y(t)=
Unit 1: Introduction University Question Paper Solution 1. Determine whether the following systems are: i) Memoryless, ii) Stable iii) Causal iv) Linear and v) Time-invariant. i) y(n)= nx(n) ii) y(t)=
Transforms and Orthogonal Bases
 Orthogonal Bases Transforms and Orthogonal Bases We now turn back to linear algebra to understand transforms, which map signals between different domains Recall that signals can be interpreted as vectors
Orthogonal Bases Transforms and Orthogonal Bases We now turn back to linear algebra to understand transforms, which map signals between different domains Recall that signals can be interpreted as vectors
Exercises in Digital Signal Processing
 Exercises in Digital Signal Processing Ivan W. Selesnick September, 5 Contents The Discrete Fourier Transform The Fast Fourier Transform 8 3 Filters and Review 4 Linear-Phase FIR Digital Filters 5 5 Windows
Exercises in Digital Signal Processing Ivan W. Selesnick September, 5 Contents The Discrete Fourier Transform The Fast Fourier Transform 8 3 Filters and Review 4 Linear-Phase FIR Digital Filters 5 5 Windows
EE123 Digital Signal Processing
 Announcements EE Digital Signal Processing otes posted HW due Friday SDR give away Today! Read Ch 9 $$$ give me your names Lecture based on slides by JM Kahn M Lustig, EECS UC Berkeley M Lustig, EECS UC
Announcements EE Digital Signal Processing otes posted HW due Friday SDR give away Today! Read Ch 9 $$$ give me your names Lecture based on slides by JM Kahn M Lustig, EECS UC Berkeley M Lustig, EECS UC