Lecture 4 Classical Control Overview II. Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
|
|
|
- Dora Benson
- 5 years ago
- Views:
Transcription


1 Lecture 4 Classical Control Overview II Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
2 Stability Analysis through Transfer Function Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore

3 Introduction Conceptual description of linear system stability 3
4 Introduction 4
5 Introduction 5
6 Introduction Total response of a system is the sum of transient and steady state responses; i.e. ct = c () transient staedystate () t + c () t c transient ( t) is the response that goes from a initial state to the final state as t evolves. c ( t) is the response as t staedystate 6
7 Stability Definition A system is Stable if the natural response approaches zero as time approaches infinity. A system is Unstable if the natural response approaches infinity as time approaches infinity. A system is Marginally Stable if the natural response neither decays nor grows but remains constant or oscillates within a bound 7
8 Definition (BIBO Stability) A system is Stable if every bounded input yields a bounded output. A system is Unstable if any bounded input yields an unbounded output. Note: For linear systems, both notions of stability are equivalent. 8
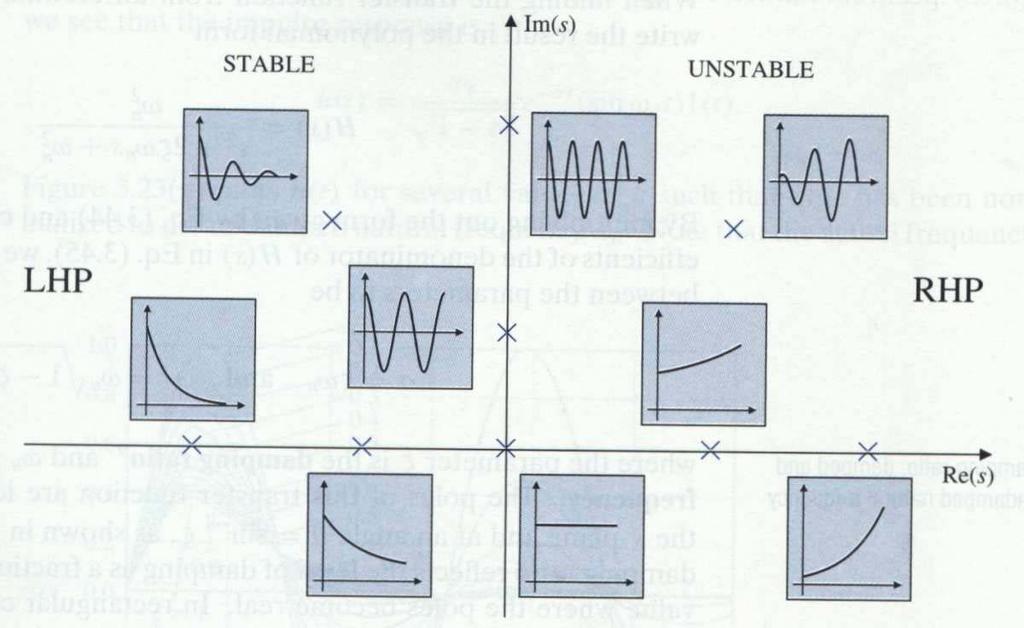
9 Stability Analysis from Closed Loop Transfer function Stable systems have closed-loop transfer functions with poles only in the left half-plane. Unstable systems have closed-loop transfer functions with at least one pole in the right half plane and/or poles of multiplicity greater than one on the imaginary axis. Marginally Stable systems have closed-loop transfer functions with only imaginary axis poles of multiplicity 1 and poles in the left half-plane. 9
10 Stability of closed loop system with gain variation As gain is increased from 3 to 7, the system becomes unstable 10
11 Routh Hurwitz Approach for Stability Analysis Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
12 Sufficient Conditions for Instability and Marginal Stability: A system is Unstable if all signs of the coefficients of the denominator of the closed loop transfer function are not same. If powers of s are missing from the denominator of the closed loop transfer function, then the system is either Unstable or at best Marginally Stable Question: What if all coefficients are positive and no power of s is missing? Answer: Routh-Hurwitz criterion. 12
- 1907")
-1919")
13 Routh Hurwitz Edward Routh, 1831 (Quebec) (Cambridge, England) Adolf Hurwitz, 1859 (Germany)-1919 (Zurich) 13
14 Routh Hurwitz Criterion Caution: This method tells how many closed loop system poles are in the left-half plane, in the righthalf plane and on the jω axis. However, it does not tell the location of the poles. Methodology o Construct a Routh table o Interpret the Routh table: The sign of the entries of the first column imbeds the information about the stability of the closed loop system. 14
15 Generating Routh Table from Closed loop Transfer Function Initial layout for Routh table: 15
16 Generating Routh Table : Completed Routh table Note: Any row of the Routh table can be multiplied by a positive constant 16
17 Interpreting the Routh Table The no. of roots of the polynomial that are in the right half-plane is equal to the number of sign changes in the first column. A system is Stable if there are no sign changes in the first column of the Routh table. 17
18 Example : Ref : N. S. Nise, Control Systems Engineering, 4 th Ed. Wiley,
19 Example : Solution: Since all the coefficients of the closed-loop characteristic 3 2 equation s + 10s + 31s are present, the system passes the Hurwitz test. So we must construct the Routh array in order to test the stability further. 19
20 Example : it is clear that column 1 of the Routh array is: it has two sign changes ( from 1 to -72 and from -72 to 103). Hence the system is unstable with two poles in the righthalf plane. 20
21 Routh-Hurwitz Criterion: Special Cases The basic Routh table check fails in the following two cases: Zero only in the first column of a row Entire row consisting of zeros These cases need further analysis 21
22 Special Case 1: Zero only in the first column (1) Replace zero by ε. Then let ε 0 either from left or right. ( d) (2) Replace s by 1/. The resulting ploynomial will have roots which are reciprocal of the roots of the original polynomial. Hence they will have the same sign. The resulting ploynomial can be written by a polynomial with coefficient in reverse order. 22
23 Special Case 2: Entire row that consists of zeros Form the Auxiliary equation from the row above the row of zero Differentiate the polynomial with respect to s and replace the row of zero by its Coefficients Continue with the construction of the Routh table and infer about the stability from the number of sign changes in the first column 23
24 Stabilizing control gain design via Routh-Hurwitz Objective: To find the range of gain K for the following system to be stable, unstable and marginally stable, assuming K > 0. Gs () H() s = 1 24
25 Stability analysis via Routh- Hurwitz criterion Closed loop transfer function: Cs () Gs () K T() s = = = 3 2 R() s 1 + G() s H() s s + 18s + 77s+ K Routh Table: 25
26 Stability design via Routh- Hurwitz : If If If K K K < 1386 system is stable (three poles in the LHS) > 1386 system is unstable (two poles in RHS one in LHS) = 1386 then an entire row will be zero. 2 Then the auxiliary equation is ( ) dp() s ds = 36s + 0 Routh table (with K = 1386) Ps = s + The system is Stable (marginally stable) 26
27 Steady State Error Analysis Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
28 Definition and Test Inputs Steady-state error is the difference between the input and the output for a prescribed test input as t Usual test inputs used for steady-state error analysis and design are Step, Ramp and Parabola inputs (justification comes from the Taylor series analysis). 28
29 Test Inputs Test waveforms for evaluating steady-state errors of control systems 29
30 Evaluating Steady State Errors Ref: N. S. Nise, Control Systems Engineering, 4 th Ed. Wiley, Figure : Steady-state error: a. step input b. ramp input 30
31 Evaluating Steady State Errors a. General Representation b. Representation for unity feedback systems 31
32 Steady-State Error for Unity Feedback Systems Steady-State Error in Terms of T(s), Es () = Rs () Cs () Cs () = RsTs () () Es () = Rs ()[1 Ts ()] Applying Final Value Theorem, e( ) = lim e( t) = lim se( s) t s 0 s 0 e( ) = lim sr( s)[1 T( s)] 32
33 An Example Problem : Find the steady-state error for the system if T s = s + s+ 2 ( ) 5/( 7 10) and the input is a unit step. Solution : Rs = s Ts = s + s+ 2 () 1/ and () 5/( 7 10) = This yields Es ( ) ( s 7s 5) / ss ( 7s 10) since T( s) is stable, by final value theorem, e( ) = 1/ 2 33
34 Steady-State Error for Unity Feedback Systems.. Steady State Error in Terms of G(s) Es () = Rs () Cs () Cs () = EsGs () () ( ) Es () = Rs ()/1 + Gs () By Final ValueTheorem, e sr() s + Gs ( ) = lim s 0 1 ( ) Note: Input Rs ( ) and System Gs ( ) allow us to calculate steady-state error e( ) 34
35 Effect of input on steady-state error : Step Input : R() s = 1/ s e s(1/ s) 1 ( ) = estep ( ) = lim = s Gs ( ) 1 + lim Gs ( ) s 0 For zerosteady-stateerror, lim Gs ( ) =. Hence Gs If s 0 Gs ( ) must have the form: ( s+ z )( s+ z ) () = andn 1 n s ( s+ p1)( s+ p2)... n = 0, then the system will have finite steady state error. 35
36 Effect of input on steady-state error.. Ramp Input : Rs () = 1/ s 2 2 s(1/ s ) 1 1 e( ) = eramp ( ) = lim = lim = s 01 + Gs ( ) s 0 s+ sgs ( ) lim sgs ( ) For zero steady-state error, lim sg( s) =. Hence Gs s 0 Gs ( ) must have the form: ( s+ z )( s+ z ) () = andn 2 n s ( s+ p1)( s+ p2)... s 0 36
37 Effect of input on steady-state error.. Parabolic input : Rs () = 1/ s 3 3 s(1/ s ) 1 1 s 0 s s 0 2 e( ) = eparabola ( ) = lim = lim = 1 Gs ( ) s sgs ( ) lim sgs ( ) For zero steady-state error, lim sgs ( ) = s 0 Hence Gs ( ) must have the form: ( s+ z )( s+ z )... G s = 1 2 () and n 3 n s ( s+ p1)( s+ p2)... 37
38 An Example Objective : To find the steady-state errors of the following system 2 for inputs of 5 ut ( ), 5 tut ( )and 5 tut ( ), where ut ( ) is the unit step function. 38
39 Example Solution : First we verify that the closed loop system is stable. Next, carryout the following analysis. 2 2 The Laplace transform of 5 ( ), 5 ( ), 5 ( )are 5 /, 5 / and 5 / respectively e( = ) estep ( ) = = = 1 + limgs () s 0 s e( ) = eramp ( ) = = = lim sg( s) e( ) = eparabola ( ) = = =. sgs ut tut tut s s s lim 2 ( ) 0 s 0 39
40 Static Error Constants and System Type : The steady-stateerror performance specifications arecalled "static error constants", defined as follows: Position constant K = lim G( s) s 0 Velocity constant K = lim sg( s) Acceleration constant K p v a s 0 2 = lim sgs ( ) s 0 "System Type"is the value of n in the denominator of G( s); ie.. Number of pure integrators in the forward path. Note: n = 0,1,2 indicates Type 0,1,2 system respectively. 40
41 Relationship between input, system type, static error constants and steady state errors Ref: N.S.Nise, Control Systems Engineering,4 th Ed. Wiley,
42 Interpreting the steady-state error specification : Question : What information is contained in K = 1000? Answer : The system is stable. The system is Type 0, since K is finite. If the input signal is unit step, then e( ) = = = K p p p 42
43 Steady-State Error for Disturbance Inputs [ ] [ ] Es () = Rs () Cs () = Rs () EsG () sg() s + DsG () () s 1 + G ( s) G ( s) E( s) = R( s) D( s) G ( s) G () s Es Rs Ds E s E s 2 () = () () = R() + D() 1 + G1( s) G2( s) 1 + G1( s) G2( s) Hence the steady state error ( s) can be reduced by either increasing G ( s) or decreasing G ( s). E 1 2 D 43
44 Steady-State Error for Non-unity Feedback Systems Forming an Equivalent Unity Feedback System 44
45 Sensitivity The degree to which changes in system parameters affect system transfer functions, and hence performance, is called sensitivity. The greater the sensitivity, the less desirable the effect of a parameter change. 45
46 Sensitivity S FP : = = lim ΔP 0 Fractionalchangein the parameter lim ΔP 0 Fractional change in the function ΔF/ F ΔP/ P P ΔF P F = lim = ΔP 0 F ΔP F P F P Note : In some cases feedback reduces the sensitivity of a system's steady-state error to changes in system parameters. 46
47 Example Ramp input: R( s) = 1/ K e v = lim sg( s) = ramp s 0 1 = = K v a K K a s 2 S S ea : a e a 1 = = = 1 e a a/ K K K e K a = = = 1 e K a/ K K ek : 2 47
48 48
49 49
EEE 184: Introduction to feedback systems
 EEE 84: Introduction to feedback systems Summary 6 8 8 x 7 7 6 Level() 6 5 4 4 5 5 time(s) 4 6 8 Time (seconds) Fig.. Illustration of BIBO stability: stable system (the input is a unit step) Fig.. step)
EEE 84: Introduction to feedback systems Summary 6 8 8 x 7 7 6 Level() 6 5 4 4 5 5 time(s) 4 6 8 Time (seconds) Fig.. Illustration of BIBO stability: stable system (the input is a unit step) Fig.. step)
Software Engineering/Mechatronics 3DX4. Slides 6: Stability
 Software Engineering/Mechatronics 3DX4 Slides 6: Stability Dr. Ryan Leduc Department of Computing and Software McMaster University Material based on lecture notes by P. Taylor and M. Lawford, and Control
Software Engineering/Mechatronics 3DX4 Slides 6: Stability Dr. Ryan Leduc Department of Computing and Software McMaster University Material based on lecture notes by P. Taylor and M. Lawford, and Control
Control Systems Engineering ( Chapter 6. Stability ) Prof. Kwang-Chun Ho Tel: Fax:
 Prof. Kwang-Chun Ho Tel: Fax:") Control Systems Engineering ( Chapter 6. Stability ) Prof. Kwang-Chun Ho kwangho@hansung.ac.kr Tel: 02-760-4253 Fax:02-760-4435 Introduction In this lesson, you will learn the following : How to determine
Control Systems Engineering ( Chapter 6. Stability ) Prof. Kwang-Chun Ho kwangho@hansung.ac.kr Tel: 02-760-4253 Fax:02-760-4435 Introduction In this lesson, you will learn the following : How to determine
Some special cases
 Lecture Notes on Control Systems/D. Ghose/2012 87 11.3.1 Some special cases Routh table is easy to form in most cases, but there could be some cases when we need to do some extra work. Case 1: The first
Lecture Notes on Control Systems/D. Ghose/2012 87 11.3.1 Some special cases Routh table is easy to form in most cases, but there could be some cases when we need to do some extra work. Case 1: The first
Fundamental of Control Systems Steady State Error Lecturer: Dr. Wahidin Wahab M.Sc. Aries Subiantoro, ST. MSc.
 Fundamental of Control Systems Steady State Error Lecturer: Dr. Wahidin Wahab M.Sc. Aries Subiantoro, ST. MSc. Electrical Engineering Department University of Indonesia 2 Steady State Error How well can
Fundamental of Control Systems Steady State Error Lecturer: Dr. Wahidin Wahab M.Sc. Aries Subiantoro, ST. MSc. Electrical Engineering Department University of Indonesia 2 Steady State Error How well can
Last week: analysis of pinion-rack w velocity feedback
 Last week: analysis of pinion-rack w velocity feedback Calculation of the steady state error Transfer function: V (s) V ref (s) = 0.362K s +2+0.362K Step input: V ref (s) = s Output: V (s) = s 0.362K s
Last week: analysis of pinion-rack w velocity feedback Calculation of the steady state error Transfer function: V (s) V ref (s) = 0.362K s +2+0.362K Step input: V ref (s) = s Output: V (s) = s 0.362K s
Automatic Control Systems (FCS) Lecture- 8 Steady State Error
 Lecture- 8 Steady State Error") Automatic Control Systems (FCS) Lecture- 8 Steady State Error Introduction Any physical control system inherently suffers steady-state error in response to certain types of inputs. A system may have no
Automatic Control Systems (FCS) Lecture- 8 Steady State Error Introduction Any physical control system inherently suffers steady-state error in response to certain types of inputs. A system may have no
ECEN 605 LINEAR SYSTEMS. Lecture 20 Characteristics of Feedback Control Systems II Feedback and Stability 1/27
 1/27 ECEN 605 LINEAR SYSTEMS Lecture 20 Characteristics of Feedback Control Systems II Feedback and Stability Feedback System Consider the feedback system u + G ol (s) y Figure 1: A unity feedback system
1/27 ECEN 605 LINEAR SYSTEMS Lecture 20 Characteristics of Feedback Control Systems II Feedback and Stability Feedback System Consider the feedback system u + G ol (s) y Figure 1: A unity feedback system
ECE317 : Feedback and Control
 ECE317 : Feedback and Control Lecture : Routh-Hurwitz stability criterion Examples Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling
ECE317 : Feedback and Control Lecture : Routh-Hurwitz stability criterion Examples Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling
Outline. Control systems. Lecture-4 Stability. V. Sankaranarayanan. V. Sankaranarayanan Control system
 Outline Control systems Lecture-4 Stability V. Sankaranarayanan Outline Outline 1 Outline Outline 1 2 Concept of Stability Zero State Response: The zero-state response is due to the input only; all the
Outline Control systems Lecture-4 Stability V. Sankaranarayanan Outline Outline 1 Outline Outline 1 2 Concept of Stability Zero State Response: The zero-state response is due to the input only; all the
I Stable, marginally stable, & unstable linear systems. I Relationship between pole locations and stability. I Routh-Hurwitz criterion
 EE C128 / ME C134 Feedback Control Systems Lecture Chapter 6 Stability Lecture abstract Alexandre Bayen Department of Electrical Engineering & Computer Science University of California Berkeley Topics
EE C128 / ME C134 Feedback Control Systems Lecture Chapter 6 Stability Lecture abstract Alexandre Bayen Department of Electrical Engineering & Computer Science University of California Berkeley Topics
Remember that : Definition :
 Stability This lecture we will concentrate on How to determine the stability of a system represented as a transfer function How to determine the stability of a system represented in state-space How to
Stability This lecture we will concentrate on How to determine the stability of a system represented as a transfer function How to determine the stability of a system represented in state-space How to
Radar Dish. Armature controlled dc motor. Inside. θ r input. Outside. θ D output. θ m. Gearbox. Control Transmitter. Control. θ D.
 Radar Dish ME 304 CONTROL SYSTEMS Mechanical Engineering Department, Middle East Technical University Armature controlled dc motor Outside θ D output Inside θ r input r θ m Gearbox Control Transmitter
Radar Dish ME 304 CONTROL SYSTEMS Mechanical Engineering Department, Middle East Technical University Armature controlled dc motor Outside θ D output Inside θ r input r θ m Gearbox Control Transmitter
7.1 Introduction. Apago PDF Enhancer. Definition and Test Inputs. 340 Chapter 7 Steady-State Errors
 340 Chapter 7 Steady-State Errors 7. Introduction In Chapter, we saw that control systems analysis and design focus on three specifications: () transient response, (2) stability, and (3) steady-state errors,
340 Chapter 7 Steady-State Errors 7. Introduction In Chapter, we saw that control systems analysis and design focus on three specifications: () transient response, (2) stability, and (3) steady-state errors,
Test 2 SOLUTIONS. ENGI 5821: Control Systems I. March 15, 2010
 Test 2 SOLUTIONS ENGI 5821: Control Systems I March 15, 2010 Total marks: 20 Name: Student #: Answer each question in the space provided or on the back of a page with an indication of where to find the
Test 2 SOLUTIONS ENGI 5821: Control Systems I March 15, 2010 Total marks: 20 Name: Student #: Answer each question in the space provided or on the back of a page with an indication of where to find the
Raktim Bhattacharya. . AERO 422: Active Controls for Aerospace Vehicles. Basic Feedback Analysis & Design
 AERO 422: Active Controls for Aerospace Vehicles Basic Feedback Analysis & Design Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University Routh s Stability
AERO 422: Active Controls for Aerospace Vehicles Basic Feedback Analysis & Design Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University Routh s Stability
Lecture 6 Classical Control Overview IV. Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
 Lecture 6 Classical Control Overview IV Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Lead Lag Compensator Design Dr. Radhakant Padhi Asst.
Lecture 6 Classical Control Overview IV Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Lead Lag Compensator Design Dr. Radhakant Padhi Asst.
Lecture 5 Classical Control Overview III. Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
 Lecture 5 Classical Control Overview III Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore A Fundamental Problem in Control Systems Poles of open
Lecture 5 Classical Control Overview III Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore A Fundamental Problem in Control Systems Poles of open
SECTION 4: STEADY STATE ERROR
 SECTION 4: STEADY STATE ERROR MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Steady State Error Introduction 3 Consider a simple unity feedback system The error is the difference between
SECTION 4: STEADY STATE ERROR MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Steady State Error Introduction 3 Consider a simple unity feedback system The error is the difference between
Dr Ian R. Manchester
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Steady State Errors. Recall the closed-loop transfer function of the system, is
 Steady State Errors Outline What is steady-state error? Steady-state error in unity feedback systems Type Number Steady-state error in non-unity feedback systems Steady-state error due to disturbance inputs
Steady State Errors Outline What is steady-state error? Steady-state error in unity feedback systems Type Number Steady-state error in non-unity feedback systems Steady-state error due to disturbance inputs
Bangladesh University of Engineering and Technology. EEE 402: Control System I Laboratory
 Bangladesh University of Engineering and Technology Electrical and Electronic Engineering Department EEE 402: Control System I Laboratory Experiment No. 4 a) Effect of input waveform, loop gain, and system
Bangladesh University of Engineering and Technology Electrical and Electronic Engineering Department EEE 402: Control System I Laboratory Experiment No. 4 a) Effect of input waveform, loop gain, and system
Analysis of Stability &
 INC 34 Feedback Control Sytem Analyi of Stability & Steady-State Error S Wonga arawan.won@kmutt.ac.th Summary from previou cla Firt-order & econd order ytem repone τ ωn ζω ω n n.8.6.4. ζ ζ. ζ.5 ζ ζ.5 ct.8.6.4...4.6.8..4.6.8
INC 34 Feedback Control Sytem Analyi of Stability & Steady-State Error S Wonga arawan.won@kmutt.ac.th Summary from previou cla Firt-order & econd order ytem repone τ ωn ζω ω n n.8.6.4. ζ ζ. ζ.5 ζ ζ.5 ct.8.6.4...4.6.8..4.6.8
Module 3F2: Systems and Control EXAMPLES PAPER 2 ROOT-LOCUS. Solutions
 Cambridge University Engineering Dept. Third Year Module 3F: Systems and Control EXAMPLES PAPER ROOT-LOCUS Solutions. (a) For the system L(s) = (s + a)(s + b) (a, b both real) show that the root-locus
Cambridge University Engineering Dept. Third Year Module 3F: Systems and Control EXAMPLES PAPER ROOT-LOCUS Solutions. (a) For the system L(s) = (s + a)(s + b) (a, b both real) show that the root-locus
Course Summary. The course cannot be summarized in one lecture.
 Course Summary Unit 1: Introduction Unit 2: Modeling in the Frequency Domain Unit 3: Time Response Unit 4: Block Diagram Reduction Unit 5: Stability Unit 6: Steady-State Error Unit 7: Root Locus Techniques
Course Summary Unit 1: Introduction Unit 2: Modeling in the Frequency Domain Unit 3: Time Response Unit 4: Block Diagram Reduction Unit 5: Stability Unit 6: Steady-State Error Unit 7: Root Locus Techniques
VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur
 VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur 603 203. DEPARTMENT OF ELECTRONICS & COMMUNICATION ENGINEERING SUBJECT QUESTION BANK : EC6405 CONTROL SYSTEM ENGINEERING SEM / YEAR: IV / II year
VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur 603 203. DEPARTMENT OF ELECTRONICS & COMMUNICATION ENGINEERING SUBJECT QUESTION BANK : EC6405 CONTROL SYSTEM ENGINEERING SEM / YEAR: IV / II year
Alireza Mousavi Brunel University
 Alireza Mousavi Brunel University 1 » Control Process» Control Systems Design & Analysis 2 Open-Loop Control: Is normally a simple switch on and switch off process, for example a light in a room is switched
Alireza Mousavi Brunel University 1 » Control Process» Control Systems Design & Analysis 2 Open-Loop Control: Is normally a simple switch on and switch off process, for example a light in a room is switched
STABILITY ANALYSIS. Asystemmaybe stable, neutrallyormarginallystable, or unstable. This can be illustrated using cones: Stable Neutral Unstable
 ECE4510/5510: Feedback Control Systems. 5 1 STABILITY ANALYSIS 5.1: Bounded-input bounded-output (BIBO) stability Asystemmaybe stable, neutrallyormarginallystable, or unstable. This can be illustrated
ECE4510/5510: Feedback Control Systems. 5 1 STABILITY ANALYSIS 5.1: Bounded-input bounded-output (BIBO) stability Asystemmaybe stable, neutrallyormarginallystable, or unstable. This can be illustrated
ECE317 : Feedback and Control
 ECE317 : Feedback and Control Lecture : Stability Routh-Hurwitz stability criterion Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling
ECE317 : Feedback and Control Lecture : Stability Routh-Hurwitz stability criterion Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling
EE Control Systems LECTURE 9
 Updated: Sunday, February, 999 EE - Control Systems LECTURE 9 Copyright FL Lewis 998 All rights reserved STABILITY OF LINEAR SYSTEMS We discuss the stability of input/output systems and of state-space
Updated: Sunday, February, 999 EE - Control Systems LECTURE 9 Copyright FL Lewis 998 All rights reserved STABILITY OF LINEAR SYSTEMS We discuss the stability of input/output systems and of state-space
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING
 KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING QUESTION BANK SUB.NAME : CONTROL SYSTEMS BRANCH : ECE YEAR : II SEMESTER: IV 1. What is control system? 2. Define open
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING QUESTION BANK SUB.NAME : CONTROL SYSTEMS BRANCH : ECE YEAR : II SEMESTER: IV 1. What is control system? 2. Define open
Lecture 10: Proportional, Integral and Derivative Actions
 MCE441: Intr. Linear Control Systems Lecture 10: Proportional, Integral and Derivative Actions Stability Concepts BIBO Stability and The Routh-Hurwitz Criterion Dorf, Sections 6.1, 6.2, 7.6 Cleveland State
MCE441: Intr. Linear Control Systems Lecture 10: Proportional, Integral and Derivative Actions Stability Concepts BIBO Stability and The Routh-Hurwitz Criterion Dorf, Sections 6.1, 6.2, 7.6 Cleveland State
IC6501 CONTROL SYSTEMS
 DHANALAKSHMI COLLEGE OF ENGINEERING CHENNAI DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING YEAR/SEMESTER: II/IV IC6501 CONTROL SYSTEMS UNIT I SYSTEMS AND THEIR REPRESENTATION 1. What is the mathematical
DHANALAKSHMI COLLEGE OF ENGINEERING CHENNAI DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING YEAR/SEMESTER: II/IV IC6501 CONTROL SYSTEMS UNIT I SYSTEMS AND THEIR REPRESENTATION 1. What is the mathematical
ECE317 : Feedback and Control
 ECE317 : Feedback and Control Lecture : Steady-state error Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling Analysis Design Laplace
ECE317 : Feedback and Control Lecture : Steady-state error Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling Analysis Design Laplace
Control Systems. University Questions
 University Questions UNIT-1 1. Distinguish between open loop and closed loop control system. Describe two examples for each. (10 Marks), Jan 2009, June 12, Dec 11,July 08, July 2009, Dec 2010 2. Write
University Questions UNIT-1 1. Distinguish between open loop and closed loop control system. Describe two examples for each. (10 Marks), Jan 2009, June 12, Dec 11,July 08, July 2009, Dec 2010 2. Write
Time Response Analysis (Part II)
") Time Response Analysis (Part II). A critically damped, continuous-time, second order system, when sampled, will have (in Z domain) (a) A simple pole (b) Double pole on real axis (c) Double pole on imaginary
Time Response Analysis (Part II). A critically damped, continuous-time, second order system, when sampled, will have (in Z domain) (a) A simple pole (b) Double pole on real axis (c) Double pole on imaginary
Introduction to Root Locus. What is root locus?
 Introduction to Root Locus What is root locus? A graphical representation of the closed loop poles as a system parameter (Gain K) is varied Method of analysis and design for stability and transient response
Introduction to Root Locus What is root locus? A graphical representation of the closed loop poles as a system parameter (Gain K) is varied Method of analysis and design for stability and transient response
Control Systems Engineering ( Chapter 7. Steady-State Errors ) Prof. Kwang-Chun Ho Tel: Fax:
 Prof. Kwang-Chun Ho Tel: Fax:") Control Sytem Engineering ( Chapter 7. Steady-State Error Prof. Kwang-Chun Ho kwangho@hanung.ac.kr Tel: 0-760-453 Fax:0-760-4435 Introduction In thi leon, you will learn the following : How to find the
Control Sytem Engineering ( Chapter 7. Steady-State Error Prof. Kwang-Chun Ho kwangho@hanung.ac.kr Tel: 0-760-453 Fax:0-760-4435 Introduction In thi leon, you will learn the following : How to find the
Control Systems Engineering ( Chapter 8. Root Locus Techniques ) Prof. Kwang-Chun Ho Tel: Fax:
 Prof. Kwang-Chun Ho Tel: Fax:") Control Systems Engineering ( Chapter 8. Root Locus Techniques ) Prof. Kwang-Chun Ho kwangho@hansung.ac.kr Tel: 02-760-4253 Fax:02-760-4435 Introduction In this lesson, you will learn the following : The
Control Systems Engineering ( Chapter 8. Root Locus Techniques ) Prof. Kwang-Chun Ho kwangho@hansung.ac.kr Tel: 02-760-4253 Fax:02-760-4435 Introduction In this lesson, you will learn the following : The
Software Engineering 3DX3. Slides 8: Root Locus Techniques
 Software Engineering 3DX3 Slides 8: Root Locus Techniques Dr. Ryan Leduc Department of Computing and Software McMaster University Material based on Control Systems Engineering by N. Nise. c 2006, 2007
Software Engineering 3DX3 Slides 8: Root Locus Techniques Dr. Ryan Leduc Department of Computing and Software McMaster University Material based on Control Systems Engineering by N. Nise. c 2006, 2007
PID controllers. Laith Batarseh. PID controllers
 Next Previous 24-Jan-15 Chapter six Laith Batarseh Home End The controller choice is an important step in the control process because this element is responsible of reducing the error (e ss ), rise time
Next Previous 24-Jan-15 Chapter six Laith Batarseh Home End The controller choice is an important step in the control process because this element is responsible of reducing the error (e ss ), rise time
CHAPTER 7 STEADY-STATE RESPONSE ANALYSES
 CHAPTER 7 STEADY-STATE RESPONSE ANALYSES 1. Introduction The steady state error is a measure of system accuracy. These errors arise from the nature of the inputs, system type and from nonlinearities of
CHAPTER 7 STEADY-STATE RESPONSE ANALYSES 1. Introduction The steady state error is a measure of system accuracy. These errors arise from the nature of the inputs, system type and from nonlinearities of
(b) A unity feedback system is characterized by the transfer function. Design a suitable compensator to meet the following specifications:
 A unity feedback system is characterized by the transfer function. Design a suitable compensator to meet the following specifications:") 1. (a) The open loop transfer function of a unity feedback control system is given by G(S) = K/S(1+0.1S)(1+S) (i) Determine the value of K so that the resonance peak M r of the system is equal to 1.4.
1. (a) The open loop transfer function of a unity feedback control system is given by G(S) = K/S(1+0.1S)(1+S) (i) Determine the value of K so that the resonance peak M r of the system is equal to 1.4.
CHAPTER # 9 ROOT LOCUS ANALYSES
 F K א CHAPTER # 9 ROOT LOCUS ANALYSES 1. Introduction The basic characteristic of the transient response of a closed-loop system is closely related to the location of the closed-loop poles. If the system
F K א CHAPTER # 9 ROOT LOCUS ANALYSES 1. Introduction The basic characteristic of the transient response of a closed-loop system is closely related to the location of the closed-loop poles. If the system
Control Systems. EC / EE / IN. For
 Control Systems For EC / EE / IN By www.thegateacademy.com Syllabus Syllabus for Control Systems Basic Control System Components; Block Diagrammatic Description, Reduction of Block Diagrams. Open Loop
Control Systems For EC / EE / IN By www.thegateacademy.com Syllabus Syllabus for Control Systems Basic Control System Components; Block Diagrammatic Description, Reduction of Block Diagrams. Open Loop
Analysis of SISO Control Loops
 Chapter 5 Analysis of SISO Control Loops Topics to be covered For a given controller and plant connected in feedback we ask and answer the following questions: Is the loop stable? What are the sensitivities
Chapter 5 Analysis of SISO Control Loops Topics to be covered For a given controller and plant connected in feedback we ask and answer the following questions: Is the loop stable? What are the sensitivities
Control Systems I. Lecture 7: Feedback and the Root Locus method. Readings: Jacopo Tani. Institute for Dynamic Systems and Control D-MAVT ETH Zürich
 Control Systems I Lecture 7: Feedback and the Root Locus method Readings: Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 2, 2018 J. Tani, E. Frazzoli (ETH) Lecture 7:
Control Systems I Lecture 7: Feedback and the Root Locus method Readings: Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 2, 2018 J. Tani, E. Frazzoli (ETH) Lecture 7:
7.4 STEP BY STEP PROCEDURE TO DRAW THE ROOT LOCUS DIAGRAM
 ROOT LOCUS TECHNIQUE. Values of on the root loci The value of at any point s on the root loci is determined from the following equation G( s) H( s) Product of lengths of vectors from poles of G( s)h( s)
ROOT LOCUS TECHNIQUE. Values of on the root loci The value of at any point s on the root loci is determined from the following equation G( s) H( s) Product of lengths of vectors from poles of G( s)h( s)
Laplace Transform Analysis of Signals and Systems
 Laplace Transform Analysis of Signals and Systems Transfer Functions Transfer functions of CT systems can be found from analysis of Differential Equations Block Diagrams Circuit Diagrams 5/10/04 M. J.
Laplace Transform Analysis of Signals and Systems Transfer Functions Transfer functions of CT systems can be found from analysis of Differential Equations Block Diagrams Circuit Diagrams 5/10/04 M. J.
Root Locus Methods. The root locus procedure
 Root Locus Methods Design of a position control system using the root locus method Design of a phase lag compensator using the root locus method The root locus procedure To determine the value of the gain
Root Locus Methods Design of a position control system using the root locus method Design of a phase lag compensator using the root locus method The root locus procedure To determine the value of the gain
STABILITY OF CLOSED-LOOP CONTOL SYSTEMS
 CHBE320 LECTURE X STABILITY OF CLOSED-LOOP CONTOL SYSTEMS Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 10-1 Road Map of the Lecture X Stability of closed-loop control
CHBE320 LECTURE X STABILITY OF CLOSED-LOOP CONTOL SYSTEMS Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 10-1 Road Map of the Lecture X Stability of closed-loop control
SECTION 5: ROOT LOCUS ANALYSIS
 SECTION 5: ROOT LOCUS ANALYSIS MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider a general feedback system: Closed loop transfer function is 1 is the forward path
SECTION 5: ROOT LOCUS ANALYSIS MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider a general feedback system: Closed loop transfer function is 1 is the forward path
CONTROL SYSTEMS LECTURE NOTES B.TECH (II YEAR II SEM) ( ) Prepared by: Mrs.P.ANITHA, Associate Professor Mr.V.KIRAN KUMAR, Assistant Professor
 ( ) Prepared by: Mrs.P.ANITHA, Associate Professor Mr.V.KIRAN KUMAR, Assistant Professor") LECTURE NOTES B.TECH (II YEAR II SEM) (2017-18) Prepared by: Mrs.P.ANITHA, Associate Professor Mr.V.KIRAN KUMAR, Assistant Professor Department of Electronics and Communication Engineering MALLA REDDY
LECTURE NOTES B.TECH (II YEAR II SEM) (2017-18) Prepared by: Mrs.P.ANITHA, Associate Professor Mr.V.KIRAN KUMAR, Assistant Professor Department of Electronics and Communication Engineering MALLA REDDY
ME 304 CONTROL SYSTEMS Spring 2016 MIDTERM EXAMINATION II
 ME 30 CONTROL SYSTEMS Spring 06 Course Instructors Dr. Tuna Balkan, Dr. Kıvanç Azgın, Dr. Ali Emre Turgut, Dr. Yiğit Yazıcıoğlu MIDTERM EXAMINATION II May, 06 Time Allowed: 00 minutes Closed Notes and
ME 30 CONTROL SYSTEMS Spring 06 Course Instructors Dr. Tuna Balkan, Dr. Kıvanç Azgın, Dr. Ali Emre Turgut, Dr. Yiğit Yazıcıoğlu MIDTERM EXAMINATION II May, 06 Time Allowed: 00 minutes Closed Notes and
Chapter 6 Steady-State Analysis of Continuous-Time Systems
 Chapter 6 Steady-State Analysis of Continuous-Time Systems 6.1 INTRODUCTION One of the objectives of a control systems engineer is to minimize the steady-state error of the closed-loop system response
Chapter 6 Steady-State Analysis of Continuous-Time Systems 6.1 INTRODUCTION One of the objectives of a control systems engineer is to minimize the steady-state error of the closed-loop system response
Controls Problems for Qualifying Exam - Spring 2014
 Controls Problems for Qualifying Exam - Spring 2014 Problem 1 Consider the system block diagram given in Figure 1. Find the overall transfer function T(s) = C(s)/R(s). Note that this transfer function
Controls Problems for Qualifying Exam - Spring 2014 Problem 1 Consider the system block diagram given in Figure 1. Find the overall transfer function T(s) = C(s)/R(s). Note that this transfer function
Chemical Process Dynamics and Control. Aisha Osman Mohamed Ahmed Department of Chemical Engineering Faculty of Engineering, Red Sea University
 Chemical Process Dynamics and Control Aisha Osman Mohamed Ahmed Department of Chemical Engineering Faculty of Engineering, Red Sea University 1 Chapter 4 System Stability 2 Chapter Objectives End of this
Chemical Process Dynamics and Control Aisha Osman Mohamed Ahmed Department of Chemical Engineering Faculty of Engineering, Red Sea University 1 Chapter 4 System Stability 2 Chapter Objectives End of this
Systems Analysis and Control
 Systems Analysis and Control Matthew M. Peet Illinois Institute of Technology Lecture : Different Types of Control Overview In this Lecture, you will learn: Limits of Proportional Feedback Performance
Systems Analysis and Control Matthew M. Peet Illinois Institute of Technology Lecture : Different Types of Control Overview In this Lecture, you will learn: Limits of Proportional Feedback Performance
Transient response via gain adjustment. Consider a unity feedback system, where G(s) = 2. The closed loop transfer function is. s 2 + 2ζωs + ω 2 n
 = 2. The closed loop transfer function is. s 2 + 2ζωs + ω 2 n") Design via frequency response Transient response via gain adjustment Consider a unity feedback system, where G(s) = ωn 2. The closed loop transfer function is s(s+2ζω n ) T(s) = ω 2 n s 2 + 2ζωs + ω 2
Design via frequency response Transient response via gain adjustment Consider a unity feedback system, where G(s) = ωn 2. The closed loop transfer function is s(s+2ζω n ) T(s) = ω 2 n s 2 + 2ζωs + ω 2
Ultimate State. MEM 355 Performance Enhancement of Dynamical Systems
 Ultimate State MEM 355 Performance Enhancement of Dnamical Sstems Harr G. Kwatn Department of Mechanical Engineering & Mechanics Drexel Universit Outline Design Criteria two step process Ultimate state
Ultimate State MEM 355 Performance Enhancement of Dnamical Sstems Harr G. Kwatn Department of Mechanical Engineering & Mechanics Drexel Universit Outline Design Criteria two step process Ultimate state
Lecture 5: Frequency domain analysis: Nyquist, Bode Diagrams, second order systems, system types
 Lecture 5: Frequency domain analysis: Nyquist, Bode Diagrams, second order systems, system types Venkata Sonti Department of Mechanical Engineering Indian Institute of Science Bangalore, India, 562 This
Lecture 5: Frequency domain analysis: Nyquist, Bode Diagrams, second order systems, system types Venkata Sonti Department of Mechanical Engineering Indian Institute of Science Bangalore, India, 562 This
INTRODUCTION TO DIGITAL CONTROL
 ECE4540/5540: Digital Control Systems INTRODUCTION TO DIGITAL CONTROL.: Introduction In ECE450/ECE550 Feedback Control Systems, welearnedhow to make an analog controller D(s) to control a linear-time-invariant
ECE4540/5540: Digital Control Systems INTRODUCTION TO DIGITAL CONTROL.: Introduction In ECE450/ECE550 Feedback Control Systems, welearnedhow to make an analog controller D(s) to control a linear-time-invariant
ECE 345 / ME 380 Introduction to Control Systems Lecture Notes 8
 Learning Objectives ECE 345 / ME 380 Introduction to Control Systems Lecture Notes 8 Dr. Oishi oishi@unm.edu November 2, 203 State the phase and gain properties of a root locus Sketch a root locus, by
Learning Objectives ECE 345 / ME 380 Introduction to Control Systems Lecture Notes 8 Dr. Oishi oishi@unm.edu November 2, 203 State the phase and gain properties of a root locus Sketch a root locus, by
Solutions to Skill-Assessment Exercises
 Solutions to Skill-Assessment Exercises To Accompany Control Systems Engineering 4 th Edition By Norman S. Nise John Wiley & Sons Copyright 2004 by John Wiley & Sons, Inc. All rights reserved. No part
Solutions to Skill-Assessment Exercises To Accompany Control Systems Engineering 4 th Edition By Norman S. Nise John Wiley & Sons Copyright 2004 by John Wiley & Sons, Inc. All rights reserved. No part
Linear State Feedback Controller Design
 Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
Linear Quadratic Regulator (LQR) Design II
 Design II") Lecture 8 Linear Quadratic Regulator LQR) Design II Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Outline Stability and Robustness properties
Lecture 8 Linear Quadratic Regulator LQR) Design II Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Outline Stability and Robustness properties
Time Response of Systems
 Chapter 0 Time Response of Systems 0. Some Standard Time Responses Let us try to get some impulse time responses just by inspection: Poles F (s) f(t) s-plane Time response p =0 s p =0,p 2 =0 s 2 t p =
Chapter 0 Time Response of Systems 0. Some Standard Time Responses Let us try to get some impulse time responses just by inspection: Poles F (s) f(t) s-plane Time response p =0 s p =0,p 2 =0 s 2 t p =
I What is root locus. I System analysis via root locus. I How to plot root locus. Root locus (RL) I Uses the poles and zeros of the OL TF
 I Uses the poles and zeros of the OL TF") EE C28 / ME C34 Feedback Control Systems Lecture Chapter 8 Root Locus Techniques Lecture abstract Alexandre Bayen Department of Electrical Engineering & Computer Science University of California Berkeley
EE C28 / ME C34 Feedback Control Systems Lecture Chapter 8 Root Locus Techniques Lecture abstract Alexandre Bayen Department of Electrical Engineering & Computer Science University of California Berkeley
Step input, ramp input, parabolic input and impulse input signals. 2. What is the initial slope of a step response of a first order system?
 IC6501 CONTROL SYSTEM UNIT-II TIME RESPONSE PART-A 1. What are the standard test signals employed for time domain studies?(or) List the standard test signals used in analysis of control systems? (April
IC6501 CONTROL SYSTEM UNIT-II TIME RESPONSE PART-A 1. What are the standard test signals employed for time domain studies?(or) List the standard test signals used in analysis of control systems? (April
Chapter 7. Digital Control Systems
 Chapter 7 Digital Control Systems 1 1 Introduction In this chapter, we introduce analysis and design of stability, steady-state error, and transient response for computer-controlled systems. Transfer functions,
Chapter 7 Digital Control Systems 1 1 Introduction In this chapter, we introduce analysis and design of stability, steady-state error, and transient response for computer-controlled systems. Transfer functions,
Routh-Hurwitz Lecture Routh-Hurwitz Stability test
 ECE 35 Routh-Hurwitz Leture Routh-Hurwitz Staility test AStolp /3/6, //9, /6/ Denominator of transfer funtion or signal: s n s n s n 3 s n 3 a s a Usually of the Closed-loop transfer funtion denominator
ECE 35 Routh-Hurwitz Leture Routh-Hurwitz Staility test AStolp /3/6, //9, /6/ Denominator of transfer funtion or signal: s n s n s n 3 s n 3 a s a Usually of the Closed-loop transfer funtion denominator
Poles, Zeros and System Response
 Time Response After the engineer obtains a mathematical representation of a subsystem, the subsystem is analyzed for its transient and steady state responses to see if these characteristics yield the desired
Time Response After the engineer obtains a mathematical representation of a subsystem, the subsystem is analyzed for its transient and steady state responses to see if these characteristics yield the desired
SECTION 7: STEADY-STATE ERROR. ESE 499 Feedback Control Systems
 SECTION 7: STEADY-STATE ERROR ESE 499 Feedback Control Systems 2 Introduction Steady-State Error Introduction 3 Consider a simple unity-feedback system The error is the difference between the reference
SECTION 7: STEADY-STATE ERROR ESE 499 Feedback Control Systems 2 Introduction Steady-State Error Introduction 3 Consider a simple unity-feedback system The error is the difference between the reference
a. Closed-loop system; b. equivalent transfer function Then the CLTF () T is s the poles of () T are s from a contribution of a
 T is s the poles of () T are s from a contribution of a") Root Locus Simple definition Locus of points on the s- plane that represents the poles of a system as one or more parameter vary. RL and its relation to poles of a closed loop system RL and its relation
Root Locus Simple definition Locus of points on the s- plane that represents the poles of a system as one or more parameter vary. RL and its relation to poles of a closed loop system RL and its relation
S I X SOLUTIONS TO CASE STUDIES CHALLENGES. Antenna Control: Stability Design via Gain K s s s+76.39K. T(s) =
 =") S I X Stability SOLUTIONS TO CASE STUDIES CHALLENGES Antenna Control: Stability Design via Gain From the antenna control challenge of Chapter 5, Make a Routh table: 76.39K s 3 +151.32s 2 +198s+76.39K s
S I X Stability SOLUTIONS TO CASE STUDIES CHALLENGES Antenna Control: Stability Design via Gain From the antenna control challenge of Chapter 5, Make a Routh table: 76.39K s 3 +151.32s 2 +198s+76.39K s
AN INTRODUCTION TO THE CONTROL THEORY
 Open-Loop controller An Open-Loop (OL) controller is characterized by no direct connection between the output of the system and its input; therefore external disturbance, non-linear dynamics and parameter
Open-Loop controller An Open-Loop (OL) controller is characterized by no direct connection between the output of the system and its input; therefore external disturbance, non-linear dynamics and parameter
DESIGN USING TRANSFORMATION TECHNIQUE CLASSICAL METHOD
 206 Spring Semester ELEC733 Digital Control System LECTURE 7: DESIGN USING TRANSFORMATION TECHNIQUE CLASSICAL METHOD For a unit ramp input Tz Ez ( ) 2 ( z ) D( z) G( z) Tz e( ) lim( z) z 2 ( z ) D( z)
206 Spring Semester ELEC733 Digital Control System LECTURE 7: DESIGN USING TRANSFORMATION TECHNIQUE CLASSICAL METHOD For a unit ramp input Tz Ez ( ) 2 ( z ) D( z) G( z) Tz e( ) lim( z) z 2 ( z ) D( z)
Digital Control Systems
 Digital Control Systems Lecture Summary #4 This summary discussed some graphical methods their use to determine the stability the stability margins of closed loop systems. A. Nyquist criterion Nyquist
Digital Control Systems Lecture Summary #4 This summary discussed some graphical methods their use to determine the stability the stability margins of closed loop systems. A. Nyquist criterion Nyquist
INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad
 Dundigal, Hyderabad") INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad - 500 043 Electrical and Electronics Engineering TUTORIAL QUESTION BAN Course Name : CONTROL SYSTEMS Course Code : A502 Class : III
INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad - 500 043 Electrical and Electronics Engineering TUTORIAL QUESTION BAN Course Name : CONTROL SYSTEMS Course Code : A502 Class : III
NADAR SARASWATHI COLLEGE OF ENGINEERING AND TECHNOLOGY Vadapudupatti, Theni
 NADAR SARASWATHI COLLEGE OF ENGINEERING AND TECHNOLOGY Vadapudupatti, Theni-625531 Question Bank for the Units I to V SE05 BR05 SU02 5 th Semester B.E. / B.Tech. Electrical & Electronics engineering IC6501
NADAR SARASWATHI COLLEGE OF ENGINEERING AND TECHNOLOGY Vadapudupatti, Theni-625531 Question Bank for the Units I to V SE05 BR05 SU02 5 th Semester B.E. / B.Tech. Electrical & Electronics engineering IC6501
MAS107 Control Theory Exam Solutions 2008
 MAS07 CONTROL THEORY. HOVLAND: EXAM SOLUTION 2008 MAS07 Control Theory Exam Solutions 2008 Geir Hovland, Mechatronics Group, Grimstad, Norway June 30, 2008 C. Repeat question B, but plot the phase curve
MAS07 CONTROL THEORY. HOVLAND: EXAM SOLUTION 2008 MAS07 Control Theory Exam Solutions 2008 Geir Hovland, Mechatronics Group, Grimstad, Norway June 30, 2008 C. Repeat question B, but plot the phase curve
Course roadmap. Step response for 2nd-order system. Step response for 2nd-order system
 ME45: Control Systems Lecture Time response of nd-order systems Prof. Clar Radcliffe and Prof. Jongeun Choi Department of Mechanical Engineering Michigan State University Modeling Laplace transform Transfer
ME45: Control Systems Lecture Time response of nd-order systems Prof. Clar Radcliffe and Prof. Jongeun Choi Department of Mechanical Engineering Michigan State University Modeling Laplace transform Transfer
Introduction. TABLE 7.1 Test waveforms for evaluating steady-state errors of position control systems. Time function. Physical interpretation
 Chapter 7 Steady-State Errors Introduction In Chapter 1, we saw that control systems analysis and design focus on three specifications: (1) transient response, (2) stability, and (3) steady-state errors,
Chapter 7 Steady-State Errors Introduction In Chapter 1, we saw that control systems analysis and design focus on three specifications: (1) transient response, (2) stability, and (3) steady-state errors,
Problems -X-O («) s-plane. s-plane *~8 -X -5. id) X s-plane. s-plane. -* Xtg) FIGURE P8.1. j-plane. JO) k JO)
 s-plane. s-plane *~8 -X -5. id) X s-plane. s-plane. -* Xtg) FIGURE P8.1. j-plane. JO) k JO)") Problems 1. For each of the root loci shown in Figure P8.1, tell whether or not the sketch can be a root locus. If the sketch cannot be a root locus, explain why. Give all reasons. [Section: 8.4] *~8 -X-O
Problems 1. For each of the root loci shown in Figure P8.1, tell whether or not the sketch can be a root locus. If the sketch cannot be a root locus, explain why. Give all reasons. [Section: 8.4] *~8 -X-O
Stability of Feedback Control Systems: Absolute and Relative
 Stability of Feedback Control Systems: Absolute and Relative Dr. Kevin Craig Greenheck Chair in Engineering Design & Professor of Mechanical Engineering Marquette University Stability: Absolute and Relative
Stability of Feedback Control Systems: Absolute and Relative Dr. Kevin Craig Greenheck Chair in Engineering Design & Professor of Mechanical Engineering Marquette University Stability: Absolute and Relative
CHBE320 LECTURE X STABILITY OF CLOSED-LOOP CONTOL SYSTEMS. Professor Dae Ryook Yang
 CHBE320 LECTURE X STABILITY OF CLOSED-LOOP CONTOL SYSTEMS Professor Dae Ryook Yang Spring 208 Dept. of Chemial and Biologial Engineering 0- Road Map of the Leture X Stability of losed-loop ontrol system
CHBE320 LECTURE X STABILITY OF CLOSED-LOOP CONTOL SYSTEMS Professor Dae Ryook Yang Spring 208 Dept. of Chemial and Biologial Engineering 0- Road Map of the Leture X Stability of losed-loop ontrol system
Homework 7 - Solutions
 Homework 7 - Solutions Note: This homework is worth a total of 48 points. 1. Compensators (9 points) For a unity feedback system given below, with G(s) = K s(s + 5)(s + 11) do the following: (c) Find the
Homework 7 - Solutions Note: This homework is worth a total of 48 points. 1. Compensators (9 points) For a unity feedback system given below, with G(s) = K s(s + 5)(s + 11) do the following: (c) Find the
STABILITY. Have looked at modeling dynamic systems using differential equations. and used the Laplace transform to help find step and impulse
 SIGNALS AND SYSTEMS: PAPER 3C1 HANDOUT 4. Dr David Corrigan 1. Electronic and Electrical Engineering Dept. corrigad@tcd.ie www.sigmedia.tv STABILITY Have looked at modeling dynamic systems using differential
SIGNALS AND SYSTEMS: PAPER 3C1 HANDOUT 4. Dr David Corrigan 1. Electronic and Electrical Engineering Dept. corrigad@tcd.ie www.sigmedia.tv STABILITY Have looked at modeling dynamic systems using differential
CONTROL * ~ SYSTEMS ENGINEERING
 CONTROL * ~ SYSTEMS ENGINEERING H Fourth Edition NormanS. Nise California State Polytechnic University, Pomona JOHN WILEY& SONS, INC. Contents 1. Introduction 1 1.1 Introduction, 2 1.2 A History of Control
CONTROL * ~ SYSTEMS ENGINEERING H Fourth Edition NormanS. Nise California State Polytechnic University, Pomona JOHN WILEY& SONS, INC. Contents 1. Introduction 1 1.1 Introduction, 2 1.2 A History of Control
Chapter 7 : Root Locus Technique
 Chapter 7 : Root Locus Technique By Electrical Engineering Department College of Engineering King Saud University 1431-143 7.1. Introduction 7.. Basics on the Root Loci 7.3. Characteristics of the Loci
Chapter 7 : Root Locus Technique By Electrical Engineering Department College of Engineering King Saud University 1431-143 7.1. Introduction 7.. Basics on the Root Loci 7.3. Characteristics of the Loci
Dr Ian R. Manchester Dr Ian R. Manchester AMME 3500 : Review
 Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
ROOT LOCUS. Consider the system. Root locus presents the poles of the closed-loop system when the gain K changes from 0 to. H(s) H ( s) = ( s)
 H ( s) = ( s)") C1 ROOT LOCUS Consider the system R(s) E(s) C(s) + K G(s) - H(s) C(s) R(s) = K G(s) 1 + K G(s) H(s) Root locus presents the poles of the closed-loop system when the gain K changes from 0 to 1+ K G ( s)
C1 ROOT LOCUS Consider the system R(s) E(s) C(s) + K G(s) - H(s) C(s) R(s) = K G(s) 1 + K G(s) H(s) Root locus presents the poles of the closed-loop system when the gain K changes from 0 to 1+ K G ( s)
Controller Design using Root Locus
 Chapter 4 Controller Design using Root Locus 4. PD Control Root locus is a useful tool to design different types of controllers. Below, we will illustrate the design of proportional derivative controllers
Chapter 4 Controller Design using Root Locus 4. PD Control Root locus is a useful tool to design different types of controllers. Below, we will illustrate the design of proportional derivative controllers
If you need more room, use the backs of the pages and indicate that you have done so.
 EE 343 Exam II Ahmad F. Taha Spring 206 Your Name: Your Signature: Exam duration: hour and 30 minutes. This exam is closed book, closed notes, closed laptops, closed phones, closed tablets, closed pretty
EE 343 Exam II Ahmad F. Taha Spring 206 Your Name: Your Signature: Exam duration: hour and 30 minutes. This exam is closed book, closed notes, closed laptops, closed phones, closed tablets, closed pretty
Control 2. Proportional and Integral control
 Control 2 Proportional and Integral control 1 Disturbance rejection in Proportional Control Θ i =5 + _ Controller K P =20 Motor K=2.45 Θ o Consider first the case where the motor steadystate gain = 2.45
Control 2 Proportional and Integral control 1 Disturbance rejection in Proportional Control Θ i =5 + _ Controller K P =20 Motor K=2.45 Θ o Consider first the case where the motor steadystate gain = 2.45
CONTROL SYSTEMS ENGINEERING Sixth Edition International Student Version
 CONTROL SYSTEMS ENGINEERING Sixth Edition International Student Version Norman S. Nise California State Polytechnic University, Pomona John Wiley fir Sons, Inc. Contents PREFACE, vii 1. INTRODUCTION, 1
CONTROL SYSTEMS ENGINEERING Sixth Edition International Student Version Norman S. Nise California State Polytechnic University, Pomona John Wiley fir Sons, Inc. Contents PREFACE, vii 1. INTRODUCTION, 1
Control System (ECE411) Lectures 13 & 14
 Lectures 13 & 14") Control System (ECE411) Lectures 13 & 14, Professor Department of Electrical and Computer Engineering Colorado State University Fall 2016 Steady-State Error Analysis Remark: For a unity feedback system
Control System (ECE411) Lectures 13 & 14, Professor Department of Electrical and Computer Engineering Colorado State University Fall 2016 Steady-State Error Analysis Remark: For a unity feedback system
Raktim Bhattacharya. . AERO 422: Active Controls for Aerospace Vehicles. Dynamic Response
 .. AERO 422: Active Controls for Aerospace Vehicles Dynamic Response Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. . Previous Class...........
.. AERO 422: Active Controls for Aerospace Vehicles Dynamic Response Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. . Previous Class...........
Lecture 1 Root Locus
 Root Locus ELEC304-Alper Erdogan 1 1 Lecture 1 Root Locus What is Root-Locus? : A graphical representation of closed loop poles as a system parameter varied. Based on Root-Locus graph we can choose the
Root Locus ELEC304-Alper Erdogan 1 1 Lecture 1 Root Locus What is Root-Locus? : A graphical representation of closed loop poles as a system parameter varied. Based on Root-Locus graph we can choose the
Identification Methods for Structural Systems. Prof. Dr. Eleni Chatzi System Stability - 26 March, 2014
 Prof. Dr. Eleni Chatzi System Stability - 26 March, 24 Fundamentals Overview System Stability Assume given a dynamic system with input u(t) and output x(t). The stability property of a dynamic system can
Prof. Dr. Eleni Chatzi System Stability - 26 March, 24 Fundamentals Overview System Stability Assume given a dynamic system with input u(t) and output x(t). The stability property of a dynamic system can