Signals and Systems Chapter 2
|
|
|
- Maximillian Logan
- 5 years ago
- Views:
Transcription
1 Signals and Systems Chapter 2 Continuous-Time Systems Prof. Yasser Mostafa Kadah
2 Overview of Chapter 2 Systems and their classification Linear time-invariant systems
3 System Concept Mathematical transformation of an input signal (or signals) into an output signal (or signals) Idealized model of the physical device or process Examples: Electrical/electronic circuits In practice, the model and the mathematical representation are not unique
4 System Classification Static or dynamic systems Capability of storing energy, or remembering state Lumped- or distributed-parameter systems Passive or active systems Ex: circuits elements Continuous time, discrete time, digital, or hybrid systems According to type of input/output signals
5 LTI Continuous-Time Systems A continuous-time system is a system in which the signals at its input and output are continuous-time signals
= a x y(x)= a x + b Linear Nonlinear")
6 Linearity A linear system is a system in which the superposition holds Output Scaling Additivity Linear System input Output Nonlinear System Examples: y(x)= a x y(x)= a x + b Linear Nonlinear input
7 Linearity Examples Show that the following systems are nonlinear: where x(t) is the input and y(t), z(t), and v(t) are the outputs. Whenever the explicit relation between the input and the output of a system is represented by a nonlinear expression the system is nonlinear
8 Linearity Examples Consider each of the components of an RLC circuit and determine under what conditions they are linear. R C L
9 Linearity Examples Op Amp Linear or nonlinear region Virtual short
10 Time Invariance System S does not change with time System does not age its parameters are constant Example: AM modulation
11 RLC Circuits Kirchhoff s voltage law, d/dt Second-order differential equation with constant coefficients Input the voltage source v(t) Output the current i(t)
12 Representation of Systems by Differential Equations Given a dynamic system represented by a linear differential equation with constant coefficients: N initial conditions: Input x(t)=0 for t < 0, Complete response y(t) for t>=0 has two parts: Zero-state response Zero-input response
13 Representation of Systems by Differential Equations Linear Time-Invariant Systems System represented by linear differential equation with constant coefficients Initial conditions are all zero Output depends exclusively on input only Nonlinear Systems Nonzero initial conditions means nonlinearity Can also be time-varying
14 Representation of Systems by Differential Equations Define derivative operator D as, Then,
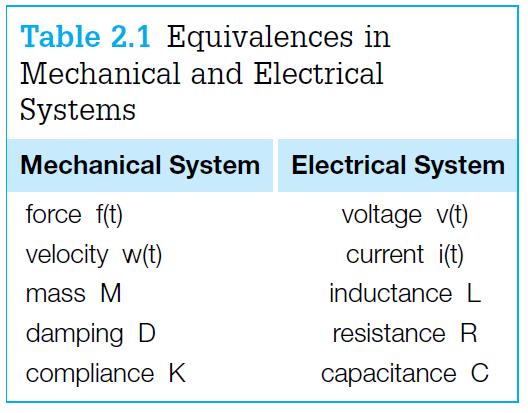
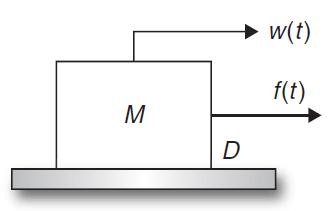
15 Analog Mechanical Systems
16 Application of Superposition and Time Invariance The computation of the output of an LTI system is simplified when the input can be represented as the combination of signals for which we know their response. Using superposition and time invariance properties
17 Application of Superposition and Time Invariance: Example Example 1: Given the response of an RL circuit to a unitstep source u(t), find the response to a pulse
, is the output of the system corresponding to an")
 to any signal x(t) is given by:")
18 Convolution Integral Generic representation of a signal: The impulse response of an analog LTI system, h(t), is the output of the system corresponding to an impulse (t) as input, and zero initial conditions The response of an LTI system S represented by its impulse response h(t) to any signal x(t) is given by: Convolution Integral
19 Convolution Integral: Observations Impulse response is fundamental in the characterization of linear time-invariant systems Any system characterized by the convolution integral is linear and time invariant by the above construction The convolution integral is a general representation of LTI systems, given that it was obtained from a generic representation of the input signal Given that a system represented by a linear differential equation with constant coefficients and no initial conditions, or input, before t=0 is LTI, one should be able to represent that system by a convolution integral after finding its impulse response h(t)
20 Convolution Integral: Example Example: Obtain the impulse response of a capacitor and use it to find its unit-step response by means of the convolution integral. Let C = 1 F.
21 Causality A continuous-time system S is called causal if: Whenever the input x(t)=0 and there are no initial conditions, the output is y(t)=0 The output y(t) does not depend on future inputs For a value > 0, when considering causality it is helpful to think of: Time t (the time at which the output y(t) is being computed) as the present Times t- as the past Times t+ as the future
22 Causality
23 Graphical Computation of Convolution Integral Example 1: Graphically find the unit-step y(t) response of an averager, with T=1 sec, which has an impulse response h(t)= u(t)-u(t-1)
24 Graphical Computation of Convolution Integral Example 2: Consider the graphical computation of the convolution integral of two pulses of the same duration
25 Interconnection of Systems Block Diagrams (a) Cascade (commutative) (b) Parallel (distributive) (c) Feedback
26 Bounded-Input Bounded-Output Stability (BIBO) For a bounded (i.e., well-behaved) input x(t), the output of a BIBO stable system y(t) is also bounded An LTI system with an absolutely integrable impulse response is BIBO stable Example: Multi-echo path system
27 Problem Assignments Problems: 2.3, 2.4, 2.8, 2.9, 2.10, 2.12, 2.14 Partial Solutions available from the student section of the textbook web site
Therefore the new Fourier coefficients are. Module 2 : Signals in Frequency Domain Problem Set 2. Problem 1
 Module 2 : Signals in Frequency Domain Problem Set 2 Problem 1 Let be a periodic signal with fundamental period T and Fourier series coefficients. Derive the Fourier series coefficients of each of the
Module 2 : Signals in Frequency Domain Problem Set 2 Problem 1 Let be a periodic signal with fundamental period T and Fourier series coefficients. Derive the Fourier series coefficients of each of the
06/12/ rws/jMc- modif SuFY10 (MPF) - Textbook Section IX 1
 - Textbook Section IX 1") IV. Continuous-Time Signals & LTI Systems [p. 3] Analog signal definition [p. 4] Periodic signal [p. 5] One-sided signal [p. 6] Finite length signal [p. 7] Impulse function [p. 9] Sampling property [p.11]
IV. Continuous-Time Signals & LTI Systems [p. 3] Analog signal definition [p. 4] Periodic signal [p. 5] One-sided signal [p. 6] Finite length signal [p. 7] Impulse function [p. 9] Sampling property [p.11]
University Question Paper Solution
 Unit 1: Introduction University Question Paper Solution 1. Determine whether the following systems are: i) Memoryless, ii) Stable iii) Causal iv) Linear and v) Time-invariant. i) y(n)= nx(n) ii) y(t)=
Unit 1: Introduction University Question Paper Solution 1. Determine whether the following systems are: i) Memoryless, ii) Stable iii) Causal iv) Linear and v) Time-invariant. i) y(n)= nx(n) ii) y(t)=
Module 1: Signals & System
 Module 1: Signals & System Lecture 6: Basic Signals in Detail Basic Signals in detail We now introduce formally some of the basic signals namely 1) The Unit Impulse function. 2) The Unit Step function
Module 1: Signals & System Lecture 6: Basic Signals in Detail Basic Signals in detail We now introduce formally some of the basic signals namely 1) The Unit Impulse function. 2) The Unit Step function
信號與系統 Signals and Systems
 Spring 2015 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb15 Jun15 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
Spring 2015 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb15 Jun15 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
Interconnection of LTI Systems
 EENG226 Signals and Systems Chapter 2 Time-Domain Representations of Linear Time-Invariant Systems Interconnection of LTI Systems Prof. Dr. Hasan AMCA Electrical and Electronic Engineering Department (ee.emu.edu.tr)
EENG226 Signals and Systems Chapter 2 Time-Domain Representations of Linear Time-Invariant Systems Interconnection of LTI Systems Prof. Dr. Hasan AMCA Electrical and Electronic Engineering Department (ee.emu.edu.tr)
Cosc 3451 Signals and Systems. What is a system? Systems Terminology and Properties of Systems
 Cosc 3451 Signals and Systems Systems Terminology and Properties of Systems What is a system? an entity that manipulates one or more signals to yield new signals (often to accomplish a function) can be
Cosc 3451 Signals and Systems Systems Terminology and Properties of Systems What is a system? an entity that manipulates one or more signals to yield new signals (often to accomplish a function) can be
Lecture 2. Introduction to Systems (Lathi )
") Lecture 2 Introduction to Systems (Lathi 1.6-1.8) Pier Luigi Dragotti Department of Electrical & Electronic Engineering Imperial College London URL: www.commsp.ee.ic.ac.uk/~pld/teaching/ E-mail: p.dragotti@imperial.ac.uk
Lecture 2 Introduction to Systems (Lathi 1.6-1.8) Pier Luigi Dragotti Department of Electrical & Electronic Engineering Imperial College London URL: www.commsp.ee.ic.ac.uk/~pld/teaching/ E-mail: p.dragotti@imperial.ac.uk
信號與系統 Signals and Systems
 Spring 2010 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb10 Jun10 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
Spring 2010 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb10 Jun10 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
Chapter 1 Fundamental Concepts
 Chapter 1 Fundamental Concepts 1 Signals A signal is a pattern of variation of a physical quantity, often as a function of time (but also space, distance, position, etc). These quantities are usually the
Chapter 1 Fundamental Concepts 1 Signals A signal is a pattern of variation of a physical quantity, often as a function of time (but also space, distance, position, etc). These quantities are usually the
Modeling and Analysis of Systems Lecture #3 - Linear, Time-Invariant (LTI) Systems. Guillaume Drion Academic year
 Systems. Guillaume Drion Academic year") Modeling and Analysis of Systems Lecture #3 - Linear, Time-Invariant (LTI) Systems Guillaume Drion Academic year 2015-2016 1 Outline Systems modeling: input/output approach and LTI systems. Convolution
Modeling and Analysis of Systems Lecture #3 - Linear, Time-Invariant (LTI) Systems Guillaume Drion Academic year 2015-2016 1 Outline Systems modeling: input/output approach and LTI systems. Convolution
Chapter 1 Fundamental Concepts
 Chapter 1 Fundamental Concepts Signals A signal is a pattern of variation of a physical quantity as a function of time, space, distance, position, temperature, pressure, etc. These quantities are usually
Chapter 1 Fundamental Concepts Signals A signal is a pattern of variation of a physical quantity as a function of time, space, distance, position, temperature, pressure, etc. These quantities are usually
Chapter 2 Time-Domain Representations of LTI Systems
 Chapter 2 Time-Domain Representations of LTI Systems 1 Introduction Impulse responses of LTI systems Linear constant-coefficients differential or difference equations of LTI systems Block diagram representations
Chapter 2 Time-Domain Representations of LTI Systems 1 Introduction Impulse responses of LTI systems Linear constant-coefficients differential or difference equations of LTI systems Block diagram representations
2 Classification of Continuous-Time Systems
 Continuous-Time Signals and Systems 1 Preliminaries Notation for a continuous-time signal: x(t) Notation: If x is the input to a system T and y the corresponding output, then we use one of the following
Continuous-Time Signals and Systems 1 Preliminaries Notation for a continuous-time signal: x(t) Notation: If x is the input to a system T and y the corresponding output, then we use one of the following
Analog Signals and Systems and their properties
 Analog Signals and Systems and their properties Main Course Objective: Recall course objectives Understand the fundamentals of systems/signals interaction (know how systems can transform or filter signals)
Analog Signals and Systems and their properties Main Course Objective: Recall course objectives Understand the fundamentals of systems/signals interaction (know how systems can transform or filter signals)
Differential Equations and Lumped Element Circuits
 Differential Equations and Lumped Element Circuits 8 Introduction Chapter 8 of the text discusses the numerical solution of ordinary differential equations. Differential equations and in particular linear
Differential Equations and Lumped Element Circuits 8 Introduction Chapter 8 of the text discusses the numerical solution of ordinary differential equations. Differential equations and in particular linear
Chapter 2: Linear systems & sinusoids OVE EDFORS DEPT. OF EIT, LUND UNIVERSITY
 Chapter 2: Linear systems & sinusoids OVE EDFORS DEPT. OF EIT, LUND UNIVERSITY Learning outcomes After this lecture, the student should understand what a linear system is, including linearity conditions,
Chapter 2: Linear systems & sinusoids OVE EDFORS DEPT. OF EIT, LUND UNIVERSITY Learning outcomes After this lecture, the student should understand what a linear system is, including linearity conditions,
Introduction to Signals and Systems Lecture #4 - Input-output Representation of LTI Systems Guillaume Drion Academic year
 Introduction to Signals and Systems Lecture #4 - Input-output Representation of LTI Systems Guillaume Drion Academic year 2017-2018 1 Outline Systems modeling: input/output approach of LTI systems. Convolution
Introduction to Signals and Systems Lecture #4 - Input-output Representation of LTI Systems Guillaume Drion Academic year 2017-2018 1 Outline Systems modeling: input/output approach of LTI systems. Convolution
Linear Systems. ! Textbook: Strum, Contemporary Linear Systems using MATLAB.
 Linear Systems LS 1! Textbook: Strum, Contemporary Linear Systems using MATLAB.! Contents 1. Basic Concepts 2. Continuous Systems a. Laplace Transforms and Applications b. Frequency Response of Continuous
Linear Systems LS 1! Textbook: Strum, Contemporary Linear Systems using MATLAB.! Contents 1. Basic Concepts 2. Continuous Systems a. Laplace Transforms and Applications b. Frequency Response of Continuous
Lecture 1: Introduction Introduction
 Module 1: Signals in Natural Domain Lecture 1: Introduction Introduction The intent of this introduction is to give the reader an idea about Signals and Systems as a field of study and its applications.
Module 1: Signals in Natural Domain Lecture 1: Introduction Introduction The intent of this introduction is to give the reader an idea about Signals and Systems as a field of study and its applications.
Digital Signal Processing Lecture 4
 Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
AC&ST AUTOMATIC CONTROL AND SYSTEM THEORY SYSTEMS AND MODELS. Claudio Melchiorri
 C. Melchiorri (DEI) Automatic Control & System Theory 1 AUTOMATIC CONTROL AND SYSTEM THEORY SYSTEMS AND MODELS Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI)
C. Melchiorri (DEI) Automatic Control & System Theory 1 AUTOMATIC CONTROL AND SYSTEM THEORY SYSTEMS AND MODELS Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI)
Differential and Difference LTI systems
 Signals and Systems Lecture: 6 Differential and Difference LTI systems Differential and difference linear time-invariant (LTI) systems constitute an extremely important class of systems in engineering.
Signals and Systems Lecture: 6 Differential and Difference LTI systems Differential and difference linear time-invariant (LTI) systems constitute an extremely important class of systems in engineering.
DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING EXAMINATIONS 2010
 [E2.5] IMPERIAL COLLEGE LONDON DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING EXAMINATIONS 2010 EEE/ISE PART II MEng. BEng and ACGI SIGNALS AND LINEAR SYSTEMS Time allowed: 2:00 hours There are FOUR
[E2.5] IMPERIAL COLLEGE LONDON DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING EXAMINATIONS 2010 EEE/ISE PART II MEng. BEng and ACGI SIGNALS AND LINEAR SYSTEMS Time allowed: 2:00 hours There are FOUR
Ch 2: Linear Time-Invariant System
 Ch 2: Linear Time-Invariant System A system is said to be Linear Time-Invariant (LTI) if it possesses the basic system properties of linearity and time-invariance. Consider a system with an output signal
Ch 2: Linear Time-Invariant System A system is said to be Linear Time-Invariant (LTI) if it possesses the basic system properties of linearity and time-invariance. Consider a system with an output signal
School of Engineering Faculty of Built Environment, Engineering, Technology & Design
 Module Name and Code : ENG60803 Real Time Instrumentation Semester and Year : Semester 5/6, Year 3 Lecture Number/ Week : Lecture 3, Week 3 Learning Outcome (s) : LO5 Module Co-ordinator/Tutor : Dr. Phang
Module Name and Code : ENG60803 Real Time Instrumentation Semester and Year : Semester 5/6, Year 3 Lecture Number/ Week : Lecture 3, Week 3 Learning Outcome (s) : LO5 Module Co-ordinator/Tutor : Dr. Phang
Solving a RLC Circuit using Convolution with DERIVE for Windows
 Solving a RLC Circuit using Convolution with DERIVE for Windows Michel Beaudin École de technologie supérieure, rue Notre-Dame Ouest Montréal (Québec) Canada, H3C K3 mbeaudin@seg.etsmtl.ca - Introduction
Solving a RLC Circuit using Convolution with DERIVE for Windows Michel Beaudin École de technologie supérieure, rue Notre-Dame Ouest Montréal (Québec) Canada, H3C K3 mbeaudin@seg.etsmtl.ca - Introduction
NAME: 23 February 2017 EE301 Signals and Systems Exam 1 Cover Sheet
 NAME: 23 February 2017 EE301 Signals and Systems Exam 1 Cover Sheet Test Duration: 75 minutes Coverage: Chaps 1,2 Open Book but Closed Notes One 85 in x 11 in crib sheet Calculators NOT allowed DO NOT
NAME: 23 February 2017 EE301 Signals and Systems Exam 1 Cover Sheet Test Duration: 75 minutes Coverage: Chaps 1,2 Open Book but Closed Notes One 85 in x 11 in crib sheet Calculators NOT allowed DO NOT
Chapter 3 Convolution Representation
 Chapter 3 Convolution Representation DT Unit-Impulse Response Consider the DT SISO system: xn [ ] System yn [ ] xn [ ] = δ[ n] If the input signal is and the system has no energy at n = 0, the output yn
Chapter 3 Convolution Representation DT Unit-Impulse Response Consider the DT SISO system: xn [ ] System yn [ ] xn [ ] = δ[ n] If the input signal is and the system has no energy at n = 0, the output yn
Lecture 2 ELE 301: Signals and Systems
 Lecture 2 ELE 301: Signals and Systems Prof. Paul Cuff Princeton University Fall 2011-12 Cuff (Lecture 2) ELE 301: Signals and Systems Fall 2011-12 1 / 70 Models of Continuous Time Signals Today s topics:
Lecture 2 ELE 301: Signals and Systems Prof. Paul Cuff Princeton University Fall 2011-12 Cuff (Lecture 2) ELE 301: Signals and Systems Fall 2011-12 1 / 70 Models of Continuous Time Signals Today s topics:
UNIT 1. SIGNALS AND SYSTEM
 Page no: 1 UNIT 1. SIGNALS AND SYSTEM INTRODUCTION A SIGNAL is defined as any physical quantity that changes with time, distance, speed, position, pressure, temperature or some other quantity. A SIGNAL
Page no: 1 UNIT 1. SIGNALS AND SYSTEM INTRODUCTION A SIGNAL is defined as any physical quantity that changes with time, distance, speed, position, pressure, temperature or some other quantity. A SIGNAL
EE 341 Homework Chapter 2
 EE 341 Homework Chapter 2 2.1 The electrical circuit shown in Fig. P2.1 consists of two resistors R1 and R2 and a capacitor C. Determine the differential equation relating the input voltage v(t) to the
EE 341 Homework Chapter 2 2.1 The electrical circuit shown in Fig. P2.1 consists of two resistors R1 and R2 and a capacitor C. Determine the differential equation relating the input voltage v(t) to the
UCSD ECE153 Handout #40 Prof. Young-Han Kim Thursday, May 29, Homework Set #8 Due: Thursday, June 5, 2011
 UCSD ECE53 Handout #40 Prof. Young-Han Kim Thursday, May 9, 04 Homework Set #8 Due: Thursday, June 5, 0. Discrete-time Wiener process. Let Z n, n 0 be a discrete time white Gaussian noise (WGN) process,
UCSD ECE53 Handout #40 Prof. Young-Han Kim Thursday, May 9, 04 Homework Set #8 Due: Thursday, June 5, 0. Discrete-time Wiener process. Let Z n, n 0 be a discrete time white Gaussian noise (WGN) process,
EE 210. Signals and Systems Solutions of homework 2
 EE 2. Signals and Systems Solutions of homework 2 Spring 2 Exercise Due Date Week of 22 nd Feb. Problems Q Compute and sketch the output y[n] of each discrete-time LTI system below with impulse response
EE 2. Signals and Systems Solutions of homework 2 Spring 2 Exercise Due Date Week of 22 nd Feb. Problems Q Compute and sketch the output y[n] of each discrete-time LTI system below with impulse response
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM. COURSE: ECE 3084A (Prof. Michaels)
") GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM DATE: 09-Dec-13 COURSE: ECE 3084A (Prof. Michaels) NAME: STUDENT #: LAST, FIRST Write your name on the front page
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM DATE: 09-Dec-13 COURSE: ECE 3084A (Prof. Michaels) NAME: STUDENT #: LAST, FIRST Write your name on the front page
ECE Branch GATE Paper The order of the differential equation + + = is (A) 1 (B) 2
 1 (B) 2") Question 1 Question 20 carry one mark each. 1. The order of the differential equation + + = is (A) 1 (B) 2 (C) 3 (D) 4 2. The Fourier series of a real periodic function has only P. Cosine terms if it is
Question 1 Question 20 carry one mark each. 1. The order of the differential equation + + = is (A) 1 (B) 2 (C) 3 (D) 4 2. The Fourier series of a real periodic function has only P. Cosine terms if it is
NAME: 13 February 2013 EE301 Signals and Systems Exam 1 Cover Sheet
 NAME: February EE Signals and Systems Exam Cover Sheet Test Duration: 75 minutes. Coverage: Chaps., Open Book but Closed Notes. One 8.5 in. x in. crib sheet Calculators NOT allowed. This test contains
NAME: February EE Signals and Systems Exam Cover Sheet Test Duration: 75 minutes. Coverage: Chaps., Open Book but Closed Notes. One 8.5 in. x in. crib sheet Calculators NOT allowed. This test contains
9. Introduction and Chapter Objectives
 Real Analog - Circuits 1 Chapter 9: Introduction to State Variable Models 9. Introduction and Chapter Objectives In our analysis approach of dynamic systems so far, we have defined variables which describe
Real Analog - Circuits 1 Chapter 9: Introduction to State Variable Models 9. Introduction and Chapter Objectives In our analysis approach of dynamic systems so far, we have defined variables which describe
Module 4. Related web links and videos. 1. FT and ZT
 Module 4 Laplace transforms, ROC, rational systems, Z transform, properties of LT and ZT, rational functions, system properties from ROC, inverse transforms Related web links and videos Sl no Web link
Module 4 Laplace transforms, ROC, rational systems, Z transform, properties of LT and ZT, rational functions, system properties from ROC, inverse transforms Related web links and videos Sl no Web link
Lecture 6: Time-Domain Analysis of Continuous-Time Systems Dr.-Ing. Sudchai Boonto
 Lecture 6: Time-Domain Analysis of Continuous-Time Systems Dr-Ing Sudchai Boonto Department of Control System and Instrumentation Engineering King Mongkut s Unniversity of Technology Thonburi Thailand
Lecture 6: Time-Domain Analysis of Continuous-Time Systems Dr-Ing Sudchai Boonto Department of Control System and Instrumentation Engineering King Mongkut s Unniversity of Technology Thonburi Thailand
New Mexico State University Klipsch School of Electrical Engineering. EE312 - Signals and Systems I Spring 2018 Exam #1
 New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Spring 2018 Exam #1 Name: Prob. 1 Prob. 2 Prob. 3 Prob. 4 Total / 30 points / 20 points / 25 points /
New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Spring 2018 Exam #1 Name: Prob. 1 Prob. 2 Prob. 3 Prob. 4 Total / 30 points / 20 points / 25 points /
Basic. Theory. ircuit. Charles A. Desoer. Ernest S. Kuh. and. McGraw-Hill Book Company
 Basic C m ш ircuit Theory Charles A. Desoer and Ernest S. Kuh Department of Electrical Engineering and Computer Sciences University of California, Berkeley McGraw-Hill Book Company New York St. Louis San
Basic C m ш ircuit Theory Charles A. Desoer and Ernest S. Kuh Department of Electrical Engineering and Computer Sciences University of California, Berkeley McGraw-Hill Book Company New York St. Louis San
Lecture IV: LTI models of physical systems
 BME 171: Signals and Systems Duke University September 5, 2008 This lecture Plan for the lecture: 1 Interconnections of linear systems 2 Differential equation models of LTI systems 3 eview of linear circuit
BME 171: Signals and Systems Duke University September 5, 2008 This lecture Plan for the lecture: 1 Interconnections of linear systems 2 Differential equation models of LTI systems 3 eview of linear circuit
 DIGITAL SIGNAL PROCESSING UNIT 1 SIGNALS AND SYSTEMS 1. What is a continuous and discrete time signal? Continuous time signal: A signal x(t) is said to be continuous if it is defined for all time t. Continuous
DIGITAL SIGNAL PROCESSING UNIT 1 SIGNALS AND SYSTEMS 1. What is a continuous and discrete time signal? Continuous time signal: A signal x(t) is said to be continuous if it is defined for all time t. Continuous
2. CONVOLUTION. Convolution sum. Response of d.t. LTI systems at a certain input signal
 2. CONVOLUTION Convolution sum. Response of d.t. LTI systems at a certain input signal Any signal multiplied by the unit impulse = the unit impulse weighted by the value of the signal in 0: xn [ ] δ [
2. CONVOLUTION Convolution sum. Response of d.t. LTI systems at a certain input signal Any signal multiplied by the unit impulse = the unit impulse weighted by the value of the signal in 0: xn [ ] δ [
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE)
") QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
Source-Free RC Circuit
 First Order Circuits Source-Free RC Circuit Initial charge on capacitor q = Cv(0) so that voltage at time 0 is v(0). What is v(t)? Prof Carruthers (ECE @ BU) EK307 Notes Summer 2018 150 / 264 First Order
First Order Circuits Source-Free RC Circuit Initial charge on capacitor q = Cv(0) so that voltage at time 0 is v(0). What is v(t)? Prof Carruthers (ECE @ BU) EK307 Notes Summer 2018 150 / 264 First Order
Analog vs. discrete signals
 Analog vs. discrete signals Continuous-time signals are also known as analog signals because their amplitude is analogous (i.e., proportional) to the physical quantity they represent. Discrete-time signals
Analog vs. discrete signals Continuous-time signals are also known as analog signals because their amplitude is analogous (i.e., proportional) to the physical quantity they represent. Discrete-time signals
Chapter 6: The Laplace Transform. Chih-Wei Liu
 Chapter 6: The Laplace Transform Chih-Wei Liu Outline Introduction The Laplace Transform The Unilateral Laplace Transform Properties of the Unilateral Laplace Transform Inversion of the Unilateral Laplace
Chapter 6: The Laplace Transform Chih-Wei Liu Outline Introduction The Laplace Transform The Unilateral Laplace Transform Properties of the Unilateral Laplace Transform Inversion of the Unilateral Laplace
MAE143 A - Signals and Systems - Winter 11 Midterm, February 2nd
 MAE43 A - Signals and Systems - Winter Midterm, February 2nd Instructions (i) This exam is open book. You may use whatever written materials you choose, including your class notes and textbook. You may
MAE43 A - Signals and Systems - Winter Midterm, February 2nd Instructions (i) This exam is open book. You may use whatever written materials you choose, including your class notes and textbook. You may
8 sin 3 V. For the circuit given, determine the voltage v for all time t. Assume that no energy is stored in the circuit before t = 0.
 For the circuit given, determine the voltage v for all time t. Assume that no energy is stored in the circuit before t = 0. Spring 2015, Exam #5, Problem #1 4t Answer: e tut 8 sin 3 V 1 For the circuit
For the circuit given, determine the voltage v for all time t. Assume that no energy is stored in the circuit before t = 0. Spring 2015, Exam #5, Problem #1 4t Answer: e tut 8 sin 3 V 1 For the circuit
Full file at 2CT IMPULSE, IMPULSE RESPONSE, AND CONVOLUTION CHAPTER 2CT
 2CT.2 UNIT IMPULSE 2CT.2. CHAPTER 2CT 2CT.2.2 (d) We can see from plot (c) that the limit?7 Ä!, B :?7 9 œb 9$ 9. This result is consistent with the sampling property: B $ œb $ 9 9 9 9 2CT.2.3 # # $ sin
2CT.2 UNIT IMPULSE 2CT.2. CHAPTER 2CT 2CT.2.2 (d) We can see from plot (c) that the limit?7 Ä!, B :?7 9 œb 9$ 9. This result is consistent with the sampling property: B $ œb $ 9 9 9 9 2CT.2.3 # # $ sin
Solution 10 July 2015 ECE301 Signals and Systems: Midterm. Cover Sheet
 Solution 10 July 2015 ECE301 Signals and Systems: Midterm Cover Sheet Test Duration: 60 minutes Coverage: Chap. 1,2,3,4 One 8.5" x 11" crib sheet is allowed. Calculators, textbooks, notes are not allowed.
Solution 10 July 2015 ECE301 Signals and Systems: Midterm Cover Sheet Test Duration: 60 minutes Coverage: Chap. 1,2,3,4 One 8.5" x 11" crib sheet is allowed. Calculators, textbooks, notes are not allowed.
Control Systems Engineering (Chapter 2. Modeling in the Frequency Domain) Prof. Kwang-Chun Ho Tel: Fax:
 Prof. Kwang-Chun Ho Tel: Fax:") Control Systems Engineering (Chapter 2. Modeling in the Frequency Domain) Prof. Kwang-Chun Ho kwangho@hansung.ac.kr Tel: 02-760-4253 Fax:02-760-4435 Overview Review on Laplace transform Learn about transfer
Control Systems Engineering (Chapter 2. Modeling in the Frequency Domain) Prof. Kwang-Chun Ho kwangho@hansung.ac.kr Tel: 02-760-4253 Fax:02-760-4435 Overview Review on Laplace transform Learn about transfer
ELEG 305: Digital Signal Processing
 ELEG 305: Digital Signal Processing Lecture 1: Course Overview; Discrete-Time Signals & Systems Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 2008 K. E.
ELEG 305: Digital Signal Processing Lecture 1: Course Overview; Discrete-Time Signals & Systems Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 2008 K. E.
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
New Mexico State University Klipsch School of Electrical Engineering. EE312 - Signals and Systems I Fall 2017 Exam #1
 New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Fall 2017 Exam #1 Name: Prob. 1 Prob. 2 Prob. 3 Prob. 4 Total / 30 points / 20 points / 25 points / 25
New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Fall 2017 Exam #1 Name: Prob. 1 Prob. 2 Prob. 3 Prob. 4 Total / 30 points / 20 points / 25 points / 25
1.4 Unit Step & Unit Impulse Functions
 1.4 Unit Step & Unit Impulse Functions 1.4.1 The Discrete-Time Unit Impulse and Unit-Step Sequences Unit Impulse Function: δ n = ቊ 0, 1, n 0 n = 0 Figure 1.28: Discrete-time Unit Impulse (sample) 1 [n]
1.4 Unit Step & Unit Impulse Functions 1.4.1 The Discrete-Time Unit Impulse and Unit-Step Sequences Unit Impulse Function: δ n = ቊ 0, 1, n 0 n = 0 Figure 1.28: Discrete-time Unit Impulse (sample) 1 [n]
Question Paper Code : AEC11T02
 Hall Ticket No Question Paper Code : AEC11T02 VARDHAMAN COLLEGE OF ENGINEERING (AUTONOMOUS) Affiliated to JNTUH, Hyderabad Four Year B. Tech III Semester Tutorial Question Bank 2013-14 (Regulations: VCE-R11)
Hall Ticket No Question Paper Code : AEC11T02 VARDHAMAN COLLEGE OF ENGINEERING (AUTONOMOUS) Affiliated to JNTUH, Hyderabad Four Year B. Tech III Semester Tutorial Question Bank 2013-14 (Regulations: VCE-R11)
GATE EE Topic wise Questions SIGNALS & SYSTEMS
 www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
Signals & Systems interaction in the Time Domain. (Systems will be LTI from now on unless otherwise stated)
") Signals & Systems interaction in the Time Domain (Systems will be LTI from now on unless otherwise stated) Course Objectives Specific Course Topics: -Basic test signals and their properties -Basic system
Signals & Systems interaction in the Time Domain (Systems will be LTI from now on unless otherwise stated) Course Objectives Specific Course Topics: -Basic test signals and their properties -Basic system
Lecture A1 : Systems and system models
 Lecture A1 : Systems and system models Jan Swevers July 2006 Aim of this lecture : Understand the process of system modelling (different steps). Define the class of systems that will be considered in this
Lecture A1 : Systems and system models Jan Swevers July 2006 Aim of this lecture : Understand the process of system modelling (different steps). Define the class of systems that will be considered in this
a_n x^(n) a_0 x = 0 with initial conditions x(0) =... = x^(n-2)(0) = 0, x^(n-1)(0) = 1/a_n.
 a_0 x = 0 with initial conditions x(0) =... = x^(n-2)(0) = 0, x^(n-1)(0) = 1/a_n.") 18.03 Class 25, April 7, 2010 Convolution, or, the superposition of impulse response 1. General equivalent initial conditions for delta response 2. Two implications of LTI 3. Superposition of unit impulse
18.03 Class 25, April 7, 2010 Convolution, or, the superposition of impulse response 1. General equivalent initial conditions for delta response 2. Two implications of LTI 3. Superposition of unit impulse
NONLINEAR AND ADAPTIVE (INTELLIGENT) SYSTEMS MODELING, DESIGN, & CONTROL A Building Block Approach
 SYSTEMS MODELING, DESIGN, & CONTROL A Building Block Approach") NONLINEAR AND ADAPTIVE (INTELLIGENT) SYSTEMS MODELING, DESIGN, & CONTROL A Building Block Approach P.A. (Rama) Ramamoorthy Electrical & Computer Engineering and Comp. Science Dept., M.L. 30, University
NONLINEAR AND ADAPTIVE (INTELLIGENT) SYSTEMS MODELING, DESIGN, & CONTROL A Building Block Approach P.A. (Rama) Ramamoorthy Electrical & Computer Engineering and Comp. Science Dept., M.L. 30, University
Module 02 Control Systems Preliminaries, Intro to State Space
 Module 02 Control Systems Preliminaries, Intro to State Space Ahmad F. Taha EE 5143: Linear Systems and Control Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha August 28, 2017 Ahmad
Module 02 Control Systems Preliminaries, Intro to State Space Ahmad F. Taha EE 5143: Linear Systems and Control Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha August 28, 2017 Ahmad
CLTI System Response (4A) Young Won Lim 4/11/15
 Young Won Lim 4/11/15") CLTI System Response (4A) Copyright (c) 2011-2015 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2
CLTI System Response (4A) Copyright (c) 2011-2015 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2
UNIT-II Z-TRANSFORM. This expression is also called a one sided z-transform. This non causal sequence produces positive powers of z in X (z).
.") Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Time-Domain Representations of LTI Systems
 2.1 Itroductio Objectives: 1. Impulse resposes of LTI systems 2. Liear costat-coefficiets differetial or differece equatios of LTI systems 3. Bloc diagram represetatios of LTI systems 4. State-variable
2.1 Itroductio Objectives: 1. Impulse resposes of LTI systems 2. Liear costat-coefficiets differetial or differece equatios of LTI systems 3. Bloc diagram represetatios of LTI systems 4. State-variable
Lecture 11 FIR Filters
 Lecture 11 FIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/4/12 1 The Unit Impulse Sequence Any sequence can be represented in this way. The equation is true if k ranges
Lecture 11 FIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/4/12 1 The Unit Impulse Sequence Any sequence can be represented in this way. The equation is true if k ranges
Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
 Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 7 Modeling Modeling is the process of representing the behavior of a real
Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 7 Modeling Modeling is the process of representing the behavior of a real
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM. COURSE: ECE 3084A (Prof. Michaels)
") GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM DATE: 30-Apr-14 COURSE: ECE 3084A (Prof. Michaels) NAME: STUDENT #: LAST, FIRST Write your name on the front page
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM DATE: 30-Apr-14 COURSE: ECE 3084A (Prof. Michaels) NAME: STUDENT #: LAST, FIRST Write your name on the front page
EE Control Systems LECTURE 9
 Updated: Sunday, February, 999 EE - Control Systems LECTURE 9 Copyright FL Lewis 998 All rights reserved STABILITY OF LINEAR SYSTEMS We discuss the stability of input/output systems and of state-space
Updated: Sunday, February, 999 EE - Control Systems LECTURE 9 Copyright FL Lewis 998 All rights reserved STABILITY OF LINEAR SYSTEMS We discuss the stability of input/output systems and of state-space
7. Find the Fourier transform of f (t)=2 cos(2π t)[u (t) u(t 1)]. 8. (a) Show that a periodic signal with exponential Fourier series f (t)= δ (ω nω 0
![7. Find the Fourier transform of f (t)=2 cos(2π t)[u (t) u(t 1)]. 8. (a) Show that a periodic signal with exponential Fourier series f (t)= δ (ω nω 0](/thumbs/96/126850209.jpg "7. Find the Fourier transform of f (t)=2 cos(2π t)[u (t) u(t 1)]. 8. (a) Show that a periodic signal with exponential Fourier series f (t)= δ (ω nω 0") Fourier Transform Problems 1. Find the Fourier transform of the following signals: a) f 1 (t )=e 3 t sin(10 t)u (t) b) f 1 (t )=e 4 t cos(10 t)u (t) 2. Find the Fourier transform of the following signals:
Fourier Transform Problems 1. Find the Fourier transform of the following signals: a) f 1 (t )=e 3 t sin(10 t)u (t) b) f 1 (t )=e 4 t cos(10 t)u (t) 2. Find the Fourier transform of the following signals:
The Continuous-time Fourier
 The Continuous-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals:
The Continuous-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals:
Discrete-Time Systems
 FIR Filters With this chapter we turn to systems as opposed to signals. The systems discussed in this chapter are finite impulse response (FIR) digital filters. The term digital filter arises because these
FIR Filters With this chapter we turn to systems as opposed to signals. The systems discussed in this chapter are finite impulse response (FIR) digital filters. The term digital filter arises because these
Background LTI Systems (4A) Young Won Lim 4/20/15
 Young Won Lim 4/20/15") Background LTI Systems (4A) Copyright (c) 2014-2015 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2
Background LTI Systems (4A) Copyright (c) 2014-2015 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2
QUESTION BANK SUBJECT: NETWORK ANALYSIS (10ES34)
") QUESTION BANK SUBJECT: NETWORK ANALYSIS (10ES34) NOTE: FOR NUMERICAL PROBLEMS FOR ALL UNITS EXCEPT UNIT 5 REFER THE E-BOOK ENGINEERING CIRCUIT ANALYSIS, 7 th EDITION HAYT AND KIMMERLY. PAGE NUMBERS OF
QUESTION BANK SUBJECT: NETWORK ANALYSIS (10ES34) NOTE: FOR NUMERICAL PROBLEMS FOR ALL UNITS EXCEPT UNIT 5 REFER THE E-BOOK ENGINEERING CIRCUIT ANALYSIS, 7 th EDITION HAYT AND KIMMERLY. PAGE NUMBERS OF
L2 gains and system approximation quality 1
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.242, Fall 24: MODEL REDUCTION L2 gains and system approximation quality 1 This lecture discusses the utility
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.242, Fall 24: MODEL REDUCTION L2 gains and system approximation quality 1 This lecture discusses the utility
Exam. 135 minutes + 15 minutes reading time
 Exam January 23, 27 Control Systems I (5-59-L) Prof. Emilio Frazzoli Exam Exam Duration: 35 minutes + 5 minutes reading time Number of Problems: 45 Number of Points: 53 Permitted aids: Important: 4 pages
Exam January 23, 27 Control Systems I (5-59-L) Prof. Emilio Frazzoli Exam Exam Duration: 35 minutes + 5 minutes reading time Number of Problems: 45 Number of Points: 53 Permitted aids: Important: 4 pages
Solution 7 August 2015 ECE301 Signals and Systems: Final Exam. Cover Sheet
 Solution 7 August 2015 ECE301 Signals and Systems: Final Exam Cover Sheet Test Duration: 120 minutes Coverage: Chap. 1, 2, 3, 4, 5, 7 One 8.5" x 11" crib sheet is allowed. Calculators, textbooks, notes
Solution 7 August 2015 ECE301 Signals and Systems: Final Exam Cover Sheet Test Duration: 120 minutes Coverage: Chap. 1, 2, 3, 4, 5, 7 One 8.5" x 11" crib sheet is allowed. Calculators, textbooks, notes
GATE 2009 Electronics and Communication Engineering
 GATE 2009 Electronics and Communication Engineering Question 1 Question 20 carry one mark each. 1. The order of the differential equation + + y =e (A) 1 (B) 2 (C) 3 (D) 4 is 2. The Fourier series of a
GATE 2009 Electronics and Communication Engineering Question 1 Question 20 carry one mark each. 1. The order of the differential equation + + y =e (A) 1 (B) 2 (C) 3 (D) 4 is 2. The Fourier series of a
Basic concepts in DT systems. Alexandra Branzan Albu ELEC 310-Spring 2009-Lecture 4 1
 Basic concepts in DT systems Alexandra Branzan Albu ELEC 310-Spring 2009-Lecture 4 1 Readings and homework For DT systems: Textbook: sections 1.5, 1.6 Suggested homework: pp. 57-58: 1.15 1.16 1.18 1.19
Basic concepts in DT systems Alexandra Branzan Albu ELEC 310-Spring 2009-Lecture 4 1 Readings and homework For DT systems: Textbook: sections 1.5, 1.6 Suggested homework: pp. 57-58: 1.15 1.16 1.18 1.19
NAME: 20 February 2014 EE301 Signals and Systems Exam 1 Cover Sheet
 NAME: February 4 EE Signals and Systems Exam Cover Sheet Test Duration: 75 minutes. Coverage: Chaps., Open Book but Closed Notes. One 8.5 in. x in. crib sheet Calculators NOT allowed. This test contains
NAME: February 4 EE Signals and Systems Exam Cover Sheet Test Duration: 75 minutes. Coverage: Chaps., Open Book but Closed Notes. One 8.5 in. x in. crib sheet Calculators NOT allowed. This test contains
Figure 1 A linear, time-invariant circuit. It s important to us that the circuit is both linear and time-invariant. To see why, let s us the notation
 Convolution In this section we consider the problem of determining the response of a linear, time-invariant circuit to an arbitrary input, x(t). This situation is illustrated in Figure 1 where x(t) is
Convolution In this section we consider the problem of determining the response of a linear, time-invariant circuit to an arbitrary input, x(t). This situation is illustrated in Figure 1 where x(t) is
The Convolution Sum for Discrete-Time LTI Systems
 The Convolution Sum for Discrete-Time LTI Systems Andrew W. H. House 01 June 004 1 The Basics of the Convolution Sum Consider a DT LTI system, L. x(n) L y(n) DT convolution is based on an earlier result
The Convolution Sum for Discrete-Time LTI Systems Andrew W. H. House 01 June 004 1 The Basics of the Convolution Sum Consider a DT LTI system, L. x(n) L y(n) DT convolution is based on an earlier result
EECS 20N: Midterm 2 Solutions
 EECS 0N: Midterm Solutions (a) The LTI system is not causal because its impulse response isn t zero for all time less than zero. See Figure. Figure : The system s impulse response in (a). (b) Recall that
EECS 0N: Midterm Solutions (a) The LTI system is not causal because its impulse response isn t zero for all time less than zero. See Figure. Figure : The system s impulse response in (a). (b) Recall that
Problem Weight Score Total 100
 EE 350 EXAM IV 15 December 2010 Last Name (Print): First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO DO SO Problem Weight Score 1 25 2 25 3 25 4 25 Total
EE 350 EXAM IV 15 December 2010 Last Name (Print): First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO DO SO Problem Weight Score 1 25 2 25 3 25 4 25 Total
FILTER DESIGN FOR SIGNAL PROCESSING USING MATLAB AND MATHEMATICAL
 FILTER DESIGN FOR SIGNAL PROCESSING USING MATLAB AND MATHEMATICAL Miroslav D. Lutovac The University of Belgrade Belgrade, Yugoslavia Dejan V. Tosic The University of Belgrade Belgrade, Yugoslavia Brian
FILTER DESIGN FOR SIGNAL PROCESSING USING MATLAB AND MATHEMATICAL Miroslav D. Lutovac The University of Belgrade Belgrade, Yugoslavia Dejan V. Tosic The University of Belgrade Belgrade, Yugoslavia Brian
Lecture 19 IIR Filters
 Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
EEL3135: Homework #4
 EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
Examples. 2-input, 1-output discrete-time systems: 1-input, 1-output discrete-time systems:
 Discrete-Time s - I Time-Domain Representation CHAPTER 4 These lecture slides are based on "Digital Signal Processing: A Computer-Based Approach, 4th ed." textbook by S.K. Mitra and its instructor materials.
Discrete-Time s - I Time-Domain Representation CHAPTER 4 These lecture slides are based on "Digital Signal Processing: A Computer-Based Approach, 4th ed." textbook by S.K. Mitra and its instructor materials.
Designing Information Devices and Systems II Spring 2016 Anant Sahai and Michel Maharbiz Midterm 2
 EECS 16B Designing Information Devices and Systems II Spring 2016 Anant Sahai and Michel Maharbiz Midterm 2 Exam location: 145 Dwinelle (SIDs ending in 1 and 5) PRINT your student ID: PRINT AND SIGN your
EECS 16B Designing Information Devices and Systems II Spring 2016 Anant Sahai and Michel Maharbiz Midterm 2 Exam location: 145 Dwinelle (SIDs ending in 1 and 5) PRINT your student ID: PRINT AND SIGN your
3.2 Complex Sinusoids and Frequency Response of LTI Systems
 3. Introduction. A signal can be represented as a weighted superposition of complex sinusoids. x(t) or x[n]. LTI system: LTI System Output = A weighted superposition of the system response to each complex
3. Introduction. A signal can be represented as a weighted superposition of complex sinusoids. x(t) or x[n]. LTI system: LTI System Output = A weighted superposition of the system response to each complex
NAME: ht () 1 2π. Hj0 ( ) dω Find the value of BW for the system having the following impulse response.
 1 2π. Hj0 ( ) dω Find the value of BW for the system having the following impulse response.") University of California at Berkeley Department of Electrical Engineering and Computer Sciences Professor J. M. Kahn, EECS 120, Fall 1998 Final Examination, Wednesday, December 16, 1998, 5-8 pm NAME: 1.
University of California at Berkeley Department of Electrical Engineering and Computer Sciences Professor J. M. Kahn, EECS 120, Fall 1998 Final Examination, Wednesday, December 16, 1998, 5-8 pm NAME: 1.
(t ) a 1. (t ).x 1..y 1
 a 1. (t ).x 1..y 1") Introduction to the convolution Experiment # 4 LTI S ystems & Convolution Amongst the concepts that cause the most confusion to electrical engineering students, the Convolution Integral stands as a repeat
Introduction to the convolution Experiment # 4 LTI S ystems & Convolution Amongst the concepts that cause the most confusion to electrical engineering students, the Convolution Integral stands as a repeat
EECE 3620: Linear Time-Invariant Systems: Chapter 2
 EECE 3620: Linear Time-Invariant Systems: Chapter 2 Prof. K. Chandra ECE, UMASS Lowell September 7, 2016 1 Continuous Time Systems In the context of this course, a system can represent a simple or complex
EECE 3620: Linear Time-Invariant Systems: Chapter 2 Prof. K. Chandra ECE, UMASS Lowell September 7, 2016 1 Continuous Time Systems In the context of this course, a system can represent a simple or complex
Module 4 : Laplace and Z Transform Problem Set 4
 Module 4 : Laplace and Z Transform Problem Set 4 Problem 1 The input x(t) and output y(t) of a causal LTI system are related to the block diagram representation shown in the figure. (a) Determine a differential
Module 4 : Laplace and Z Transform Problem Set 4 Problem 1 The input x(t) and output y(t) of a causal LTI system are related to the block diagram representation shown in the figure. (a) Determine a differential
Digital Signal Processing Chapter 10. Fourier Analysis of Discrete- Time Signals and Systems CHI. CES Engineering. Prof. Yasser Mostafa Kadah
 Digital Signal Processing Chapter 10 Fourier Analysis of Discrete- Time Signals and Systems Prof. Yasser Mostafa Kadah CHI CES Engineering Discrete-Time Fourier Transform Sampled time domain signal has
Digital Signal Processing Chapter 10 Fourier Analysis of Discrete- Time Signals and Systems Prof. Yasser Mostafa Kadah CHI CES Engineering Discrete-Time Fourier Transform Sampled time domain signal has
A two-port network is an electrical network with two separate ports
 5.1 Introduction A two-port network is an electrical network with two separate ports for input and output. Fig(a) Single Port Network Fig(b) Two Port Network There are several reasons why we should study
5.1 Introduction A two-port network is an electrical network with two separate ports for input and output. Fig(a) Single Port Network Fig(b) Two Port Network There are several reasons why we should study
Properties of LTI Systems
 Properties of LTI Systems Properties of Continuous Time LTI Systems Systems with or without memory: A system is memory less if its output at any time depends only on the value of the input at that same
Properties of LTI Systems Properties of Continuous Time LTI Systems Systems with or without memory: A system is memory less if its output at any time depends only on the value of the input at that same