Rigid Body Dynamics and Beyond
|
|
|
- Brittney Morrison
- 5 years ago
- Views:
Transcription


1 Rigid Body Dynamics and Beyond 1

2
3 Rigid Bodies 3


4 A rigid body Collection of particles Distance between any two particles is always constant What types of motions preserve these constraints? Translation, rotation 4
5 Rigid Body Parameterization (reduced coordinates) x(t) 0 p 0 p(t) p t = x t + R t p 0 position orientation 5
6 Body Orientation Rotates vectors from body to world coordinates Columns of R t encode world coordinates of body axes 6
7 Center of Mass (COM) Geometric center of the body (0,0,0) in body coordinates x t in world coordinates Geometric center: σ m i p 0i (0,0,0) M = m i COM: σ m ip i (t) M = x(t) 0 p 0i
8 Body velocities How do the COM position and orientation change with time? Linear velocity: v t = dx(t) dt = x(t) ሶ Angular velocity: ω t =? ω t encodes spin direction and magnitude What is the relationship between ω t and R t? 8
9 Angular velocity Consider vector r t. What is rሶ t? rሶ t = ω(t) r(t) Relation to ሶ R t = dr t dt? 9
10 Angular Velocity R rotates vectors from body to world coords Columns of R t : world coordinates of body axes Columns of Rሶ t : change of body axes world coordinates wrt time x ሶ t = ω(t) x (t) y ሶ t = ω(t) y (t) z ሶ t = ω(t) z (t) Putting these all together: ሶ R t =ω t R(t) 10

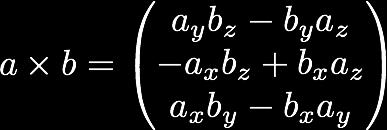
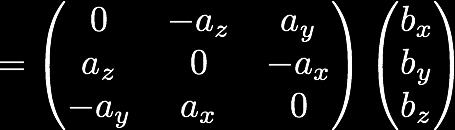
11 Recall a 11
12 ሶ Summary Kinematics: how does the body move? p t, R t v t = dx(t) dt ሶ R t =ω t R(t) = x(t) ሶ p t = x t + R t p 0 p t = xሶ t + ω t R t p 0 = xሶ t + ω t (p t x(t)) Dynamics: what causes this motion? 12
13 Forces and Torques External forces: acting on individual particles Net force on body: F = σ F i Conservation of linear momentum (Newton s 2 nd law): p = Mv; p ሶ = F Analogous concepts for angular motion 13
14 Forces and Torques Forces on individual particles generate torques - (consequence of constant inter-particle distance) Net torque on body: τ = σ τ i = σ r i f i 14
15 Forces and Torques Forces on individual particles generate torques - (consequence of constant inter-particle distance) Net torque on body: τ = σ τ i = σ r i f i Conservation of angular momentum: L = Iω; ሶ L = τ What is I? Moment of Inertia tensor 15
16 The Inertia Tensor Analogous to mass, but for rotational motions - quantifies distribution of mass as a 2 nd order tensor I = RI b R T I b = m i (p T 0i p 0i 1 p 0i p T 0i ) i Body-coords MOI is constant, can be precomputed easy to look up for common shapes! World-cords MOI changes with time! 16
17 Conservation of Linear and Angular Linear Momentum: Momenta p = Mv; p ሶ = F; v ሶ = 1 M F Angular Momentum: L = Iω; ሶ L = τ; ω ሶ = I 1 (τ ω Iω) Note: they are decoupled! 17
18 Numerical Integration COM Acceleration Velocity Position Easy: v t+1 = v t + Δt ሶ v; x t+1 = x t + Δtv t+1 Angular Acceleration Angular Velocity Easy:ω t+1 = ω t + Δtωሶ Angular Velocity to Rotations? A bit trickier: R t+1 = R t + Δt ሶ R t+1? 18
19 Updating Rotations R t+1 = R t + ΔtRሶ t+1 = R t + Δtω t+1 R t = (I + Δtω t+1 ) R t No longer a rotation matrix! Option 1: orthonormalize (Gram Schmidt) Option 2: explicitly compute rotation R Δt due to spinning with angular speed ω t+1 for Δt seconds, apply incremental rotations: R t+1 = R Δt R t NOTE: same concept applies if other rotation parameterizations (i.e. quaternions) are employed 19
20 Computing forces Given a set of forces, you know how to compute the motion of a rigid body Where do forces come from? User interaction Gravity 20
21 Rigid Bodies 21
22 Computing forces Given a set of forces, you know how to compute the motion of a rigid body Where do forces come from? User interaction Gravity Collisions and contacts 22
23 Collision Response 23
24 Collision Response 24

25 Collision Response 25
26 Collision Response 26
27 Collision Response 27
28 Collision Response Nonconvex Rigid Bodies with Stacking, Guendelman et al., SIGGRAPH
29 Computing forces Given a set of forces, you know how to compute the motion of a rigid body Where do forces come from? User interaction Gravity Collisions and contacts Easiest way to model: spring penalty forces Articulation 29
30 Articulated Rigid Body Dynamics 30
31 Computing forces Given a set of forces, you know how to compute the motion of a rigid body Where do forces come from? User interaction Gravity Collisions and contacts Easiest way to model: spring penalty forces Articulation Easiest way to model: spring penalty forces 31

32 Artistic control over rigid body simulations Many-Worlds Browsing for Control of Multibody Dynamics Twigg and James, 2007

33 Many Worlds Browsing Sampling Plausible Worlds v t+1 ` v t compute and apply impulse [O Sullivan et al., 2003]

34 Many Worlds Browsing Interactive Browsing various criteria

35 Many Worlds Browsing
36 For more information An Introduction to Physically Based Modeling: -
Thursday Simulation & Unity
 Rigid Bodies Simulation Homework Build a particle system based either on F=ma or procedural simulation Examples: Smoke, Fire, Water, Wind, Leaves, Cloth, Magnets, Flocks, Fish, Insects, Crowds, etc. Simulate
Rigid Bodies Simulation Homework Build a particle system based either on F=ma or procedural simulation Examples: Smoke, Fire, Water, Wind, Leaves, Cloth, Magnets, Flocks, Fish, Insects, Crowds, etc. Simulate
Rigid body simulation. Once we consider an object with spatial extent, particle system simulation is no longer sufficient
 Rigid body dynamics Rigid body simulation Once we consider an object with spatial extent, particle system simulation is no longer sufficient Rigid body simulation Unconstrained system no contact Constrained
Rigid body dynamics Rigid body simulation Once we consider an object with spatial extent, particle system simulation is no longer sufficient Rigid body simulation Unconstrained system no contact Constrained
III. Work and Energy
 Rotation I. Kinematics - Angular analogs II. III. IV. Dynamics - Torque and Rotational Inertia Work and Energy Angular Momentum - Bodies and particles V. Elliptical Orbits The student will be able to:
Rotation I. Kinematics - Angular analogs II. III. IV. Dynamics - Torque and Rotational Inertia Work and Energy Angular Momentum - Bodies and particles V. Elliptical Orbits The student will be able to:
Assignment 4: Rigid Body Dynamics
 Assignment 4: Rigid Body Dynamics Due April 4 at :59pm Introduction Rigid bodies are a fundamental element of many physical simulations, and the physics underlying their motions are well-understood. In
Assignment 4: Rigid Body Dynamics Due April 4 at :59pm Introduction Rigid bodies are a fundamental element of many physical simulations, and the physics underlying their motions are well-understood. In
CS-184: Computer Graphics
 CS-184: Computer Graphics Lecture #25: Rigid Body Simulations Tobias Pfaff 537 Soda (Visual Computing Lab) tpfaff@berkeley.edu Reminder Final project presentations next week! Game Physics Types of Materials
CS-184: Computer Graphics Lecture #25: Rigid Body Simulations Tobias Pfaff 537 Soda (Visual Computing Lab) tpfaff@berkeley.edu Reminder Final project presentations next week! Game Physics Types of Materials
Kinematics (special case) Dynamics gravity, tension, elastic, normal, friction. Energy: kinetic, potential gravity, spring + work (friction)
 Dynamics gravity, tension, elastic, normal, friction. Energy: kinetic, potential gravity, spring + work (friction)") Kinematics (special case) a = constant 1D motion 2D projectile Uniform circular Dynamics gravity, tension, elastic, normal, friction Motion with a = constant Newton s Laws F = m a F 12 = F 21 Time & Position
Kinematics (special case) a = constant 1D motion 2D projectile Uniform circular Dynamics gravity, tension, elastic, normal, friction Motion with a = constant Newton s Laws F = m a F 12 = F 21 Time & Position
Multibody simulation
 Multibody simulation Dynamics of a multibody system (Euler-Lagrange formulation) Dimitar Dimitrov Örebro University June 16, 2012 Main points covered Euler-Lagrange formulation manipulator inertia matrix
Multibody simulation Dynamics of a multibody system (Euler-Lagrange formulation) Dimitar Dimitrov Örebro University June 16, 2012 Main points covered Euler-Lagrange formulation manipulator inertia matrix
Lesson Rigid Body Dynamics
 Lesson 8 Rigid Body Dynamics Lesson 8 Outline Problem definition and motivations Dynamics of rigid bodies The equation of unconstrained motion (ODE) User and time control Demos / tools / libs Rigid Body
Lesson 8 Rigid Body Dynamics Lesson 8 Outline Problem definition and motivations Dynamics of rigid bodies The equation of unconstrained motion (ODE) User and time control Demos / tools / libs Rigid Body
Lecture Outline Chapter 11. Physics, 4 th Edition James S. Walker. Copyright 2010 Pearson Education, Inc.
 Lecture Outline Chapter 11 Physics, 4 th Edition James S. Walker Chapter 11 Rotational Dynamics and Static Equilibrium Units of Chapter 11 Torque Torque and Angular Acceleration Zero Torque and Static
Lecture Outline Chapter 11 Physics, 4 th Edition James S. Walker Chapter 11 Rotational Dynamics and Static Equilibrium Units of Chapter 11 Torque Torque and Angular Acceleration Zero Torque and Static
z F 3 = = = m 1 F 1 m 2 F 2 m 3 - Linear Momentum dp dt F net = d P net = d p 1 dt d p n dt - Conservation of Linear Momentum Δ P = 0
 F 1 m 2 F 2 x m 1 O z F 3 m 3 y Ma com = F net F F F net, x net, y net, z = = = Ma Ma Ma com, x com, y com, z p = mv - Linear Momentum F net = dp dt F net = d P dt = d p 1 dt +...+ d p n dt Δ P = 0 - Conservation
F 1 m 2 F 2 x m 1 O z F 3 m 3 y Ma com = F net F F F net, x net, y net, z = = = Ma Ma Ma com, x com, y com, z p = mv - Linear Momentum F net = dp dt F net = d P dt = d p 1 dt +...+ d p n dt Δ P = 0 - Conservation
Angular Momentum. Objectives CONSERVATION OF ANGULAR MOMENTUM
 Angular Momentum CONSERVATION OF ANGULAR MOMENTUM Objectives Calculate the angular momentum vector for a moving particle Calculate the angular momentum vector for a rotating rigid object where angular
Angular Momentum CONSERVATION OF ANGULAR MOMENTUM Objectives Calculate the angular momentum vector for a moving particle Calculate the angular momentum vector for a rotating rigid object where angular
Chapter 11. Angular Momentum
 Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
Motion in Space. MATH 311, Calculus III. J. Robert Buchanan. Fall Department of Mathematics. J. Robert Buchanan Motion in Space
 Motion in Space MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Fall 2011 Background Suppose the position vector of a moving object is given by r(t) = f (t), g(t), h(t), Background
Motion in Space MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Fall 2011 Background Suppose the position vector of a moving object is given by r(t) = f (t), g(t), h(t), Background
AP Pd 3 Rotational Dynamics.notebook. May 08, 2014
 1 Rotational Dynamics Why do objects spin? Objects can travel in different ways: Translation all points on the body travel in parallel paths Rotation all points on the body move around a fixed point An
1 Rotational Dynamics Why do objects spin? Objects can travel in different ways: Translation all points on the body travel in parallel paths Rotation all points on the body move around a fixed point An
Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and
 Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
Manipulator Dynamics 2. Instructor: Jacob Rosen Advanced Robotic - MAE 263D - Department of Mechanical & Aerospace Engineering - UCLA
 Manipulator Dynamics 2 Forward Dynamics Problem Given: Joint torques and links geometry, mass, inertia, friction Compute: Angular acceleration of the links (solve differential equations) Solution Dynamic
Manipulator Dynamics 2 Forward Dynamics Problem Given: Joint torques and links geometry, mass, inertia, friction Compute: Angular acceleration of the links (solve differential equations) Solution Dynamic
Physics Fall Mechanics, Thermodynamics, Waves, Fluids. Lecture 20: Rotational Motion. Slide 20-1
 Physics 1501 Fall 2008 Mechanics, Thermodynamics, Waves, Fluids Lecture 20: Rotational Motion Slide 20-1 Recap: center of mass, linear momentum A composite system behaves as though its mass is concentrated
Physics 1501 Fall 2008 Mechanics, Thermodynamics, Waves, Fluids Lecture 20: Rotational Motion Slide 20-1 Recap: center of mass, linear momentum A composite system behaves as though its mass is concentrated
1/30. Rigid Body Rotations. Dave Frank
 . 1/3 Rigid Body Rotations Dave Frank A Point Particle and Fundamental Quantities z 2/3 m v ω r y x Angular Velocity v = dr dt = ω r Kinetic Energy K = 1 2 mv2 Momentum p = mv Rigid Bodies We treat a rigid
. 1/3 Rigid Body Rotations Dave Frank A Point Particle and Fundamental Quantities z 2/3 m v ω r y x Angular Velocity v = dr dt = ω r Kinetic Energy K = 1 2 mv2 Momentum p = mv Rigid Bodies We treat a rigid
PHY131H1S - Class 20. Pre-class reading quiz on Chapter 12
 PHY131H1S - Class 20 Today: Gravitational Torque Rotational Kinetic Energy Rolling without Slipping Equilibrium with Rotation Rotation Vectors Angular Momentum Pre-class reading quiz on Chapter 12 1 Last
PHY131H1S - Class 20 Today: Gravitational Torque Rotational Kinetic Energy Rolling without Slipping Equilibrium with Rotation Rotation Vectors Angular Momentum Pre-class reading quiz on Chapter 12 1 Last
Physics 2A Chapter 10 - Rotational Motion Fall 2018
 Physics A Chapter 10 - Rotational Motion Fall 018 These notes are five pages. A quick summary: The concepts of rotational motion are a direct mirror image of the same concepts in linear motion. Follow
Physics A Chapter 10 - Rotational Motion Fall 018 These notes are five pages. A quick summary: The concepts of rotational motion are a direct mirror image of the same concepts in linear motion. Follow
DEVIL PHYSICS THE BADDEST CLASS ON CAMPUS AP PHYSICS
 DEVIL PHYSICS THE BADDEST CLASS ON CAMPUS AP PHYSICS LSN 8-8: ANGULAR MOMENTUM AND ITS CONSERVATION Questions From Reading Activity? Big Idea(s): The interactions of an object with other objects can be
DEVIL PHYSICS THE BADDEST CLASS ON CAMPUS AP PHYSICS LSN 8-8: ANGULAR MOMENTUM AND ITS CONSERVATION Questions From Reading Activity? Big Idea(s): The interactions of an object with other objects can be
Final Exam. June 10, 2008, 1:00pm
 PHYSICS 101: Fundamentals of Physics Final Exam Final Exam Name TA/ Section # June 10, 2008, 1:00pm Recitation Time You have 2 hour to complete the exam. Please answer all questions clearly and completely,
PHYSICS 101: Fundamentals of Physics Final Exam Final Exam Name TA/ Section # June 10, 2008, 1:00pm Recitation Time You have 2 hour to complete the exam. Please answer all questions clearly and completely,
Rotational Kinetic Energy
 Lecture 17, Chapter 10: Rotational Energy and Angular Momentum 1 Rotational Kinetic Energy Consider a rigid body rotating with an angular velocity ω about an axis. Clearly every point in the rigid body
Lecture 17, Chapter 10: Rotational Energy and Angular Momentum 1 Rotational Kinetic Energy Consider a rigid body rotating with an angular velocity ω about an axis. Clearly every point in the rigid body
Projects. Assignments. Plan. Motivational Films. Motivational Film 1/6/09. Dynamics II. Forces, Collisions and Impulse
 Projects Dynamics II Forces, Collisions and Impulse Presentations: Dates: Week 0: Mon, Feb 6 Week 0: Wed, Feb 8 Finals Week: Tues, Feb 4 (:30 :30) room TBA 5 minutes / presentation Schedule now on Web
Projects Dynamics II Forces, Collisions and Impulse Presentations: Dates: Week 0: Mon, Feb 6 Week 0: Wed, Feb 8 Finals Week: Tues, Feb 4 (:30 :30) room TBA 5 minutes / presentation Schedule now on Web
Chapter 9. Rotational Dynamics
 Chapter 9 Rotational Dynamics 9.1 The Action of Forces and Torques on Rigid Objects In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination
Chapter 9 Rotational Dynamics 9.1 The Action of Forces and Torques on Rigid Objects In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination
Rotational & Rigid-Body Mechanics. Lectures 3+4
 Rotational & Rigid-Body Mechanics Lectures 3+4 Rotational Motion So far: point objects moving through a trajectory. Next: moving actual dimensional objects and rotating them. 2 Circular Motion - Definitions
Rotational & Rigid-Body Mechanics Lectures 3+4 Rotational Motion So far: point objects moving through a trajectory. Next: moving actual dimensional objects and rotating them. 2 Circular Motion - Definitions
= o + t = ot + ½ t 2 = o + 2
 Chapters 8-9 Rotational Kinematics and Dynamics Rotational motion Rotational motion refers to the motion of an object or system that spins about an axis. The axis of rotation is the line about which the
Chapters 8-9 Rotational Kinematics and Dynamics Rotational motion Rotational motion refers to the motion of an object or system that spins about an axis. The axis of rotation is the line about which the
Two-Dimensional Rotational Kinematics
 Two-Dimensional Rotational Kinematics Rigid Bodies A rigid body is an extended object in which the distance between any two points in the object is constant in time. Springs or human bodies are non-rigid
Two-Dimensional Rotational Kinematics Rigid Bodies A rigid body is an extended object in which the distance between any two points in the object is constant in time. Springs or human bodies are non-rigid
PSE Game Physics. Session (6) Angular momentum, microcollisions, damping. Oliver Meister, Roland Wittmann
 Angular momentum, microcollisions, damping. Oliver Meister, Roland Wittmann") PSE Game Physics Session (6) Angular momentum, microcollisions, damping Oliver Meister, Roland Wittmann 23.05.2014 Session (6)Angular momentum, microcollisions, damping, 23.05.2014 1 Outline Angular momentum
PSE Game Physics Session (6) Angular momentum, microcollisions, damping Oliver Meister, Roland Wittmann 23.05.2014 Session (6)Angular momentum, microcollisions, damping, 23.05.2014 1 Outline Angular momentum
2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity
 2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity Energy 7 4 Kinematics Free fall Collisions 3 5 Dynamics
2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity Energy 7 4 Kinematics Free fall Collisions 3 5 Dynamics
Application of Forces. Chapter Eight. Torque. Force vs. Torque. Torque, cont. Direction of Torque 4/7/2015
 Raymond A. Serway Chris Vuille Chapter Eight Rotational Equilibrium and Rotational Dynamics Application of Forces The point of application of a force is important This was ignored in treating objects as
Raymond A. Serway Chris Vuille Chapter Eight Rotational Equilibrium and Rotational Dynamics Application of Forces The point of application of a force is important This was ignored in treating objects as
particle p = m v F ext = d P = M d v cm dt
 Lecture 11: Momentum and Collisions; Introduction to Rotation 1 REVIEW: (Chapter 8) LINEAR MOMENTUM and COLLISIONS The first new physical quantity introduced in Chapter 8 is Linear Momentum Linear Momentum
Lecture 11: Momentum and Collisions; Introduction to Rotation 1 REVIEW: (Chapter 8) LINEAR MOMENTUM and COLLISIONS The first new physical quantity introduced in Chapter 8 is Linear Momentum Linear Momentum
Chapter 8- Rotational Kinematics Angular Variables Kinematic Equations
 Chapter 8- Rotational Kinematics Angular Variables Kinematic Equations Chapter 9- Rotational Dynamics Torque Center of Gravity Newton s 2 nd Law- Angular Rotational Work & Energy Angular Momentum Angular
Chapter 8- Rotational Kinematics Angular Variables Kinematic Equations Chapter 9- Rotational Dynamics Torque Center of Gravity Newton s 2 nd Law- Angular Rotational Work & Energy Angular Momentum Angular
Circular Motion, Pt 2: Angular Dynamics. Mr. Velazquez AP/Honors Physics
 Circular Motion, Pt 2: Angular Dynamics Mr. Velazquez AP/Honors Physics Formulas: Angular Kinematics (θ must be in radians): s = rθ Arc Length 360 = 2π rads = 1 rev ω = θ t = v t r Angular Velocity α av
Circular Motion, Pt 2: Angular Dynamics Mr. Velazquez AP/Honors Physics Formulas: Angular Kinematics (θ must be in radians): s = rθ Arc Length 360 = 2π rads = 1 rev ω = θ t = v t r Angular Velocity α av
Game Physics. Game and Media Technology Master Program - Utrecht University. Dr. Nicolas Pronost
 Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Rigid body physics Particle system Most simple instance of a physics system Each object (body) is a particle Each particle
Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Rigid body physics Particle system Most simple instance of a physics system Each object (body) is a particle Each particle
Momentum. The way to catch a knuckleball is to wait until it stops rolling and then pick it up. -Bob Uecker
 Chapter 11 -, Chapter 11 -, Angular The way to catch a knuckleball is to wait until it stops rolling and then pick it up. -Bob Uecker David J. Starling Penn State Hazleton PHYS 211 Chapter 11 -, motion
Chapter 11 -, Chapter 11 -, Angular The way to catch a knuckleball is to wait until it stops rolling and then pick it up. -Bob Uecker David J. Starling Penn State Hazleton PHYS 211 Chapter 11 -, motion
Exam 3 Practice Solutions
 Exam 3 Practice Solutions Multiple Choice 1. A thin hoop, a solid disk, and a solid sphere, each with the same mass and radius, are at rest at the top of an inclined plane. If all three are released at
Exam 3 Practice Solutions Multiple Choice 1. A thin hoop, a solid disk, and a solid sphere, each with the same mass and radius, are at rest at the top of an inclined plane. If all three are released at
Forces of Rolling. 1) Ifobjectisrollingwith a com =0 (i.e.no netforces), then v com =ωr = constant (smooth roll)
 Ifobjectisrollingwith a com =0 (i.e.no netforces), then v com =ωr = constant (smooth roll)") Physics 2101 Section 3 March 12 rd : Ch. 10 Announcements: Mid-grades posted in PAW Quiz today I will be at the March APS meeting the week of 15-19 th. Prof. Rich Kurtz will help me. Class Website: http://www.phys.lsu.edu/classes/spring2010/phys2101-3/
Physics 2101 Section 3 March 12 rd : Ch. 10 Announcements: Mid-grades posted in PAW Quiz today I will be at the March APS meeting the week of 15-19 th. Prof. Rich Kurtz will help me. Class Website: http://www.phys.lsu.edu/classes/spring2010/phys2101-3/
16. Rotational Dynamics
 6. Rotational Dynamics A Overview In this unit we will address examples that combine both translational and rotational motion. We will find that we will need both Newton s second law and the rotational
6. Rotational Dynamics A Overview In this unit we will address examples that combine both translational and rotational motion. We will find that we will need both Newton s second law and the rotational
Dynamics. Basilio Bona. Semester 1, DAUIN Politecnico di Torino. B. Bona (DAUIN) Dynamics Semester 1, / 18
 Dynamics Semester 1, / 18") Dynamics Basilio Bona DAUIN Politecnico di Torino Semester 1, 2016-17 B. Bona (DAUIN) Dynamics Semester 1, 2016-17 1 / 18 Dynamics Dynamics studies the relations between the 3D space generalized forces
Dynamics Basilio Bona DAUIN Politecnico di Torino Semester 1, 2016-17 B. Bona (DAUIN) Dynamics Semester 1, 2016-17 1 / 18 Dynamics Dynamics studies the relations between the 3D space generalized forces
Chapter 9. Rotational Dynamics
 Chapter 9 Rotational Dynamics 9.1 The Action of Forces and Torques on Rigid Objects In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination
Chapter 9 Rotational Dynamics 9.1 The Action of Forces and Torques on Rigid Objects In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination
Center of Gravity Pearson Education, Inc.
 Center of Gravity = The center of gravity position is at a place where the torque from one end of the object is balanced by the torque of the other end and therefore there is NO rotation. Fulcrum Point
Center of Gravity = The center of gravity position is at a place where the torque from one end of the object is balanced by the torque of the other end and therefore there is NO rotation. Fulcrum Point
Chapter 8. Rotational Equilibrium and Rotational Dynamics
 Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
DEVIL PHYSICS BADDEST CLASS ON CAMPUS IB PHYSICS
 DEVIL PHYSICS BADDEST CLASS ON CAMPUS IB PHYSICS OPTION B-1A: ROTATIONAL DYNAMICS Essential Idea: The basic laws of mechanics have an extension when equivalent principles are applied to rotation. Actual
DEVIL PHYSICS BADDEST CLASS ON CAMPUS IB PHYSICS OPTION B-1A: ROTATIONAL DYNAMICS Essential Idea: The basic laws of mechanics have an extension when equivalent principles are applied to rotation. Actual
Game Physics. Game and Media Technology Master Program - Utrecht University. Dr. Nicolas Pronost
 Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Essential physics for game developers Introduction The primary issues Let s move virtual objects Kinematics: description
Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Essential physics for game developers Introduction The primary issues Let s move virtual objects Kinematics: description
Work - kinetic energy theorem for rotational motion *
 OpenStax-CNX module: m14307 1 Work - kinetic energy theorem for rotational motion * Sunil Kumar Singh This work is produced by OpenStax-CNX and licensed under the Creative Commons Attribution License 2.0
OpenStax-CNX module: m14307 1 Work - kinetic energy theorem for rotational motion * Sunil Kumar Singh This work is produced by OpenStax-CNX and licensed under the Creative Commons Attribution License 2.0
Chapter 9. Rotational Dynamics
 Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Chapters 10 & 11: Rotational Dynamics Thursday March 8 th
 Chapters 10 & 11: Rotational Dynamics Thursday March 8 th Review of rotational kinematics equations Review and more on rotational inertia Rolling motion as rotation and translation Rotational kinetic energy
Chapters 10 & 11: Rotational Dynamics Thursday March 8 th Review of rotational kinematics equations Review and more on rotational inertia Rolling motion as rotation and translation Rotational kinetic energy
Lectures. Today: Rolling and Angular Momentum in ch 12. Complete angular momentum (chapter 12) and begin equilibrium (chapter 13)
 and begin equilibrium (chapter 13)") Lectures Today: Rolling and Angular Momentum in ch 1 Homework 6 due Next time: Complete angular momentum (chapter 1) and begin equilibrium (chapter 13) By Monday, will post at website Sample midterm II
Lectures Today: Rolling and Angular Momentum in ch 1 Homework 6 due Next time: Complete angular momentum (chapter 1) and begin equilibrium (chapter 13) By Monday, will post at website Sample midterm II
Physics A - PHY 2048C
 Physics A - PHY 2048C and 11/15/2017 My Office Hours: Thursday 2:00-3:00 PM 212 Keen Building Warm-up Questions 1 Did you read Chapter 12 in the textbook on? 2 Must an object be rotating to have a moment
Physics A - PHY 2048C and 11/15/2017 My Office Hours: Thursday 2:00-3:00 PM 212 Keen Building Warm-up Questions 1 Did you read Chapter 12 in the textbook on? 2 Must an object be rotating to have a moment
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2)
") PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
TRANSLATIONAL & ROTATIONAL MOTION OF A RIGID BODY
 ISN--43 TRANSLATIONAL & ROTATIONAL OTION OF A RIGID BODY TRANSLATIONAL & ROTATIONAL OTION OF A RIGID BODY by J. S. Kovacs. Introduction a. General Description of the otion of a System of Particles b. Theorems
ISN--43 TRANSLATIONAL & ROTATIONAL OTION OF A RIGID BODY TRANSLATIONAL & ROTATIONAL OTION OF A RIGID BODY by J. S. Kovacs. Introduction a. General Description of the otion of a System of Particles b. Theorems
The... of a particle is defined as its change in position in some time interval.
 Distance is the. of a path followed by a particle. Distance is a quantity. The... of a particle is defined as its change in position in some time interval. Displacement is a.. quantity. The... of a particle
Distance is the. of a path followed by a particle. Distance is a quantity. The... of a particle is defined as its change in position in some time interval. Displacement is a.. quantity. The... of a particle
Final Exam Spring 2014 May 05, 2014
 95.141 Final Exam Spring 2014 May 05, 2014 Section number Section instructor Last/First name Last 3 Digits of Student ID Number: Answer all questions, beginning each new question in the space provided.
95.141 Final Exam Spring 2014 May 05, 2014 Section number Section instructor Last/First name Last 3 Digits of Student ID Number: Answer all questions, beginning each new question in the space provided.
Lab 11: Rotational Dynamics
 Lab 11: Rotational Dynamics Objectives: To understand the relationship between net torque and angular acceleration. To understand the concept of the moment of inertia. To understand the concept of angular
Lab 11: Rotational Dynamics Objectives: To understand the relationship between net torque and angular acceleration. To understand the concept of the moment of inertia. To understand the concept of angular
Chapter 11. Angular Momentum
 Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
ROTATIONAL DYNAMICS AND STATIC EQUILIBRIUM
 ROTATIONAL DYNAMICS AND STATIC EQUILIBRIUM Chapter 11 Units of Chapter 11 Torque Torque and Angular Acceleration Zero Torque and Static Equilibrium Center of Mass and Balance Dynamic Applications of Torque
ROTATIONAL DYNAMICS AND STATIC EQUILIBRIUM Chapter 11 Units of Chapter 11 Torque Torque and Angular Acceleration Zero Torque and Static Equilibrium Center of Mass and Balance Dynamic Applications of Torque
Symmetries 2 - Rotations in Space
 Symmetries 2 - Rotations in Space This symmetry is about the isotropy of space, i.e. space is the same in all orientations. Thus, if we continuously rotated an entire system in space, we expect the system
Symmetries 2 - Rotations in Space This symmetry is about the isotropy of space, i.e. space is the same in all orientations. Thus, if we continuously rotated an entire system in space, we expect the system
The Equipartition Theorem
 Chapter 8 The Equipartition Theorem Topics Equipartition and kinetic energy. The one-dimensional harmonic oscillator. Degrees of freedom and the equipartition theorem. Rotating particles in thermal equilibrium.
Chapter 8 The Equipartition Theorem Topics Equipartition and kinetic energy. The one-dimensional harmonic oscillator. Degrees of freedom and the equipartition theorem. Rotating particles in thermal equilibrium.
Chapter 8: Momentum, Impulse, & Collisions. Newton s second law in terms of momentum:
 linear momentum: Chapter 8: Momentum, Impulse, & Collisions Newton s second law in terms of momentum: impulse: Under what SPECIFIC condition is linear momentum conserved? (The answer does not involve collisions.)
linear momentum: Chapter 8: Momentum, Impulse, & Collisions Newton s second law in terms of momentum: impulse: Under what SPECIFIC condition is linear momentum conserved? (The answer does not involve collisions.)
Lecture-XII. Angular momentum and Fixed axis rotation
 Lecture-XII Angular momentum and Fixed axis rotation Angular Momentum of a System of Particles Consider a collection of N discrete particles. The total angular momentum of the system is The force acting
Lecture-XII Angular momentum and Fixed axis rotation Angular Momentum of a System of Particles Consider a collection of N discrete particles. The total angular momentum of the system is The force acting
CS229 Programming Assignment 3: Dynamics
 : Assignment Out: Wednesday, Oct. 12, 1999 Assignment Due: Fri Oct 22, 1999 (11:59 pm) 1 Introduction Physically based modeling has been an extremely active area of research in computer graphics for over
: Assignment Out: Wednesday, Oct. 12, 1999 Assignment Due: Fri Oct 22, 1999 (11:59 pm) 1 Introduction Physically based modeling has been an extremely active area of research in computer graphics for over
Lecture 9 - Rotational Dynamics
 Lecture 9 - Rotational Dynamics A Puzzle... Angular momentum is a 3D vector, and changing its direction produces a torque τ = dl. An important application in our daily lives is that bicycles don t fall
Lecture 9 - Rotational Dynamics A Puzzle... Angular momentum is a 3D vector, and changing its direction produces a torque τ = dl. An important application in our daily lives is that bicycles don t fall
ME 230: Kinematics and Dynamics Spring 2014 Section AD. Final Exam Review: Rigid Body Dynamics Practice Problem
 ME 230: Kinematics and Dynamics Spring 2014 Section AD Final Exam Review: Rigid Body Dynamics Practice Problem 1. A rigid uniform flat disk of mass m, and radius R is moving in the plane towards a wall
ME 230: Kinematics and Dynamics Spring 2014 Section AD Final Exam Review: Rigid Body Dynamics Practice Problem 1. A rigid uniform flat disk of mass m, and radius R is moving in the plane towards a wall
CIRCULAR MOTION AND ROTATION
 1. UNIFORM CIRCULAR MOTION So far we have learned a great deal about linear motion. This section addresses rotational motion. The simplest kind of rotational motion is an object moving in a perfect circle
1. UNIFORM CIRCULAR MOTION So far we have learned a great deal about linear motion. This section addresses rotational motion. The simplest kind of rotational motion is an object moving in a perfect circle
Physical Simulation. October 19, 2005
 Physical Simulation October 19, 2005 Objects So now that we have objects, lets make them behave like real objects Want to simulate properties of matter Physical properties (dynamics, kinematics) [today
Physical Simulation October 19, 2005 Objects So now that we have objects, lets make them behave like real objects Want to simulate properties of matter Physical properties (dynamics, kinematics) [today
Lecture 9 Kinetics of rigid bodies: Impulse and Momentum
 Lecture 9 Kinetics of rigid bodies: Impulse and Momentum Momentum of 2-D Rigid Bodies Recall that in lecture 5, we discussed the use of momentum of particles. Given that a particle has a, and is travelling
Lecture 9 Kinetics of rigid bodies: Impulse and Momentum Momentum of 2-D Rigid Bodies Recall that in lecture 5, we discussed the use of momentum of particles. Given that a particle has a, and is travelling
We define angular displacement, θ, and angular velocity, ω. What's a radian?
 We define angular displacement, θ, and angular velocity, ω Units: θ = rad ω = rad/s What's a radian? Radian is the ratio between the length of an arc and its radius note: counterclockwise is + clockwise
We define angular displacement, θ, and angular velocity, ω Units: θ = rad ω = rad/s What's a radian? Radian is the ratio between the length of an arc and its radius note: counterclockwise is + clockwise
Chapter 9. Rotational Dynamics
 Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Lecture II: Rigid-Body Physics
 Rigid-Body Motion Previously: Point dimensionless objects moving through a trajectory. Today: Objects with dimensions, moving as one piece. 2 Rigid-Body Kinematics Objects as sets of points. Relative distances
Rigid-Body Motion Previously: Point dimensionless objects moving through a trajectory. Today: Objects with dimensions, moving as one piece. 2 Rigid-Body Kinematics Objects as sets of points. Relative distances
Rotation Angular Momentum
 Rotation Angular Momentum Lana Sheridan De Anza College Nov 28, 2017 Last time rolling motion Overview Definition of angular momentum relation to Newton s 2nd law angular impulse angular momentum of rigid
Rotation Angular Momentum Lana Sheridan De Anza College Nov 28, 2017 Last time rolling motion Overview Definition of angular momentum relation to Newton s 2nd law angular impulse angular momentum of rigid
CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS. Prof. N. Harnew University of Oxford TT 2017
 CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS Prof. N. Harnew University of Oxford TT 2017 1 OUTLINE : CP1 REVISION LECTURE 3 : INTRODUCTION TO CLASSICAL MECHANICS 1. Angular velocity and
CP1 REVISION LECTURE 3 INTRODUCTION TO CLASSICAL MECHANICS Prof. N. Harnew University of Oxford TT 2017 1 OUTLINE : CP1 REVISION LECTURE 3 : INTRODUCTION TO CLASSICAL MECHANICS 1. Angular velocity and
Kinetic Energy of Rolling
 Kinetic Energy of Rolling A solid disk and a hoop (with the same mass and radius) are released from rest and roll down a ramp from a height h. Which one is moving faster at the bottom of the ramp? A. they
Kinetic Energy of Rolling A solid disk and a hoop (with the same mass and radius) are released from rest and roll down a ramp from a height h. Which one is moving faster at the bottom of the ramp? A. they
Multibody simulation
 Multibody simulation Dynamics of a multibody system (Newton-Euler formulation) Dimitar Dimitrov Örebro University June 8, 2012 Main points covered Newton-Euler formulation forward dynamics inverse dynamics
Multibody simulation Dynamics of a multibody system (Newton-Euler formulation) Dimitar Dimitrov Örebro University June 8, 2012 Main points covered Newton-Euler formulation forward dynamics inverse dynamics
Gyroscopes and statics
 Gyroscopes and statics Announcements: Welcome back from Spring Break! CAPA due Friday at 10pm We will finish Chapter 11 in H+R on angular momentum and start Chapter 12 on stability. Friday we will begin
Gyroscopes and statics Announcements: Welcome back from Spring Break! CAPA due Friday at 10pm We will finish Chapter 11 in H+R on angular momentum and start Chapter 12 on stability. Friday we will begin
Lecture 13 REVIEW. Physics 106 Spring What should we know? What should we know? Newton s Laws
 Lecture 13 REVIEW Physics 106 Spring 2006 http://web.njit.edu/~sirenko/ What should we know? Vectors addition, subtraction, scalar and vector multiplication Trigonometric functions sinθ, cos θ, tan θ,
Lecture 13 REVIEW Physics 106 Spring 2006 http://web.njit.edu/~sirenko/ What should we know? Vectors addition, subtraction, scalar and vector multiplication Trigonometric functions sinθ, cos θ, tan θ,
Rotational Motion, Torque, Angular Acceleration, and Moment of Inertia. 8.01t Nov 3, 2004
 Rotational Motion, Torque, Angular Acceleration, and Moment of Inertia 8.01t Nov 3, 2004 Rotation and Translation of Rigid Body Motion of a thrown object Translational Motion of the Center of Mass Total
Rotational Motion, Torque, Angular Acceleration, and Moment of Inertia 8.01t Nov 3, 2004 Rotation and Translation of Rigid Body Motion of a thrown object Translational Motion of the Center of Mass Total
Review for 3 rd Midterm
 Review for 3 rd Midterm Midterm is on 4/19 at 7:30pm in the same rooms as before You are allowed one double sided sheet of paper with any handwritten notes you like. The moment-of-inertia about the center-of-mass
Review for 3 rd Midterm Midterm is on 4/19 at 7:30pm in the same rooms as before You are allowed one double sided sheet of paper with any handwritten notes you like. The moment-of-inertia about the center-of-mass
Rigid body dynamics. Basilio Bona. DAUIN - Politecnico di Torino. October 2013
 Rigid body dynamics Basilio Bona DAUIN - Politecnico di Torino October 2013 Basilio Bona (DAUIN - Politecnico di Torino) Rigid body dynamics October 2013 1 / 16 Multiple point-mass bodies Each mass is
Rigid body dynamics Basilio Bona DAUIN - Politecnico di Torino October 2013 Basilio Bona (DAUIN - Politecnico di Torino) Rigid body dynamics October 2013 1 / 16 Multiple point-mass bodies Each mass is
Chapter 8. Rotational Motion
 Chapter 8 Rotational Motion Rotational Work and Energy W = Fs = s = rθ Frθ Consider the work done in rotating a wheel with a tangential force, F, by an angle θ. τ = Fr W =τθ Rotational Work and Energy
Chapter 8 Rotational Motion Rotational Work and Energy W = Fs = s = rθ Frθ Consider the work done in rotating a wheel with a tangential force, F, by an angle θ. τ = Fr W =τθ Rotational Work and Energy
Scalar product Work Kinetic energy Work energy theorem Potential energy Conservation of energy Power Collisions
 BLOOM PUBLIC SCHOOL Vasant Kunj, New Delhi Lesson Plan Class: XI Subject: Physics Month: August No of Periods: 11 Chapter No. 6: Work, energy and power TTT: 5 WT: 6 Chapter : Work, energy and power Scalar
BLOOM PUBLIC SCHOOL Vasant Kunj, New Delhi Lesson Plan Class: XI Subject: Physics Month: August No of Periods: 11 Chapter No. 6: Work, energy and power TTT: 5 WT: 6 Chapter : Work, energy and power Scalar
Physics 141. Lecture 18. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1
 Physics 141. Lecture 18. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1 Physics 141. Lecture 18. Course Information. Topics to be discussed today: A
Physics 141. Lecture 18. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1 Physics 141. Lecture 18. Course Information. Topics to be discussed today: A
Lecture 6 Physics 106 Spring 2006
 Lecture 6 Physics 106 Spring 2006 Angular Momentum Rolling Angular Momentum: Definition: Angular Momentum for rotation System of particles: Torque: l = r m v sinφ l = I ω [kg m 2 /s] http://web.njit.edu/~sirenko/
Lecture 6 Physics 106 Spring 2006 Angular Momentum Rolling Angular Momentum: Definition: Angular Momentum for rotation System of particles: Torque: l = r m v sinφ l = I ω [kg m 2 /s] http://web.njit.edu/~sirenko/
Handout 7: Torque, angular momentum, rotational kinetic energy and rolling motion. Torque and angular momentum
 Handout 7: Torque, angular momentum, rotational kinetic energy and rolling motion Torque and angular momentum In Figure, in order to turn a rod about a fixed hinge at one end, a force F is applied at a
Handout 7: Torque, angular momentum, rotational kinetic energy and rolling motion Torque and angular momentum In Figure, in order to turn a rod about a fixed hinge at one end, a force F is applied at a
Northwestern Connecticut Community College Course Syllabus
 Northwestern Connecticut Community College Course Syllabus Course Title: Introductory Physics Course #: PHY 110 Course Description: 4 credits (3 class hours and 3 laboratory hours per week) Physics 110
Northwestern Connecticut Community College Course Syllabus Course Title: Introductory Physics Course #: PHY 110 Course Description: 4 credits (3 class hours and 3 laboratory hours per week) Physics 110
Torque and Rotation Lecture 7
 Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Game Physics: Basic Concepts
 CMSC 498M: Chapter 8a Game Physics Reading: Game Physics, by David H Eberly, 2004 Physics for Game Developers, by David M Bourg, 2002 Overview: Basic physical quantities: Mass, center of mass, moment of
CMSC 498M: Chapter 8a Game Physics Reading: Game Physics, by David H Eberly, 2004 Physics for Game Developers, by David M Bourg, 2002 Overview: Basic physical quantities: Mass, center of mass, moment of
Rigid bodies - general theory
 Rigid bodies - general theory Kinetic Energy: based on FW-26 Consider a system on N particles with all their relative separations fixed: it has 3 translational and 3 rotational degrees of freedom. Motion
Rigid bodies - general theory Kinetic Energy: based on FW-26 Consider a system on N particles with all their relative separations fixed: it has 3 translational and 3 rotational degrees of freedom. Motion
Articulated body dynamics
 Articulated rigid bodies Articulated body dynamics Beyond human models How would you represent a pose? Quadraped animals Wavy hair Animal fur Plants Maximal vs. reduced coordinates How are things connected?
Articulated rigid bodies Articulated body dynamics Beyond human models How would you represent a pose? Quadraped animals Wavy hair Animal fur Plants Maximal vs. reduced coordinates How are things connected?
α = p = m v L = I ω Review: Torque Physics 201, Lecture 21 Review: Rotational Dynamics a = Στ = I α
 Physics 1, Lecture 1 Today s Topics q Static Equilibrium of Rigid Objects(Ch. 1.1-3) Review: Rotational and Translational Motion Conditions for Translational and Rotational Equilibrium Demos and Exercises
Physics 1, Lecture 1 Today s Topics q Static Equilibrium of Rigid Objects(Ch. 1.1-3) Review: Rotational and Translational Motion Conditions for Translational and Rotational Equilibrium Demos and Exercises
Rotation. Kinematics Rigid Bodies Kinetic Energy. Torque Rolling. featuring moments of Inertia
 Rotation Kinematics Rigid Bodies Kinetic Energy featuring moments of Inertia Torque Rolling Angular Motion We think about rotation in the same basic way we do about linear motion How far does it go? How
Rotation Kinematics Rigid Bodies Kinetic Energy featuring moments of Inertia Torque Rolling Angular Motion We think about rotation in the same basic way we do about linear motion How far does it go? How
Chapter 10: Rotation
 Chapter 10: Rotation Review of translational motion (motion along a straight line) Position x Displacement x Velocity v = dx/dt Acceleration a = dv/dt Mass m Newton s second law F = ma Work W = Fdcosφ
Chapter 10: Rotation Review of translational motion (motion along a straight line) Position x Displacement x Velocity v = dx/dt Acceleration a = dv/dt Mass m Newton s second law F = ma Work W = Fdcosφ
Fundamentals Physics
 Fundamentals Physics And Differential Equations 1 Dynamics Dynamics of a material point Ideal case, but often sufficient Dynamics of a solid Including rotation, torques 2 Position, Velocity, Acceleration
Fundamentals Physics And Differential Equations 1 Dynamics Dynamics of a material point Ideal case, but often sufficient Dynamics of a solid Including rotation, torques 2 Position, Velocity, Acceleration
FALL TERM EXAM, PHYS 1211, INTRODUCTORY PHYSICS I Thursday, 11 December 2014, 6 PM to 9 PM, Field House Gym
 FALL TERM EXAM, PHYS 1211, INTRODUCTORY PHYSICS I Thursday, 11 December 2014, 6 PM to 9 PM, Field House Gym NAME: STUDENT ID: INSTRUCTION 1. This exam booklet has 13 pages. Make sure none are missing 2.
FALL TERM EXAM, PHYS 1211, INTRODUCTORY PHYSICS I Thursday, 11 December 2014, 6 PM to 9 PM, Field House Gym NAME: STUDENT ID: INSTRUCTION 1. This exam booklet has 13 pages. Make sure none are missing 2.
Northwestern CT Community College Course Syllabus. Course Title: CALCULUS-BASED PHYSICS I with Lab Course #: PHY 221
 Northwestern CT Community College Course Syllabus Course Title: CALCULUS-BASED PHYSICS I with Lab Course #: PHY 221 Course Description: 4 credits (3 class hours and 3 laboratory hours per week) Physics
Northwestern CT Community College Course Syllabus Course Title: CALCULUS-BASED PHYSICS I with Lab Course #: PHY 221 Course Description: 4 credits (3 class hours and 3 laboratory hours per week) Physics
Chapter 6: Momentum Analysis
 6-1 Introduction 6-2Newton s Law and Conservation of Momentum 6-3 Choosing a Control Volume 6-4 Forces Acting on a Control Volume 6-5Linear Momentum Equation 6-6 Angular Momentum 6-7 The Second Law of
6-1 Introduction 6-2Newton s Law and Conservation of Momentum 6-3 Choosing a Control Volume 6-4 Forces Acting on a Control Volume 6-5Linear Momentum Equation 6-6 Angular Momentum 6-7 The Second Law of
r CM = ir im i i m i m i v i (2) P = i
 P = i") Physics 121 Test 3 study guide Thisisintendedtobeastudyguideforyourthirdtest, whichcoverschapters 9, 10, 12, and 13. Note that chapter 10 was also covered in test 2 without section 10.7 (elastic collisions),
Physics 121 Test 3 study guide Thisisintendedtobeastudyguideforyourthirdtest, whichcoverschapters 9, 10, 12, and 13. Note that chapter 10 was also covered in test 2 without section 10.7 (elastic collisions),
Rolling without slipping Angular Momentum Conservation of Angular Momentum. Physics 201: Lecture 19, Pg 1
 Physics 131: Lecture Today s Agenda Rolling without slipping Angular Momentum Conservation o Angular Momentum Physics 01: Lecture 19, Pg 1 Rolling Without Slipping Rolling is a combination o rotation and
Physics 131: Lecture Today s Agenda Rolling without slipping Angular Momentum Conservation o Angular Momentum Physics 01: Lecture 19, Pg 1 Rolling Without Slipping Rolling is a combination o rotation and
Visual Interactive Simulation, TDBD24, Spring 2006
 Visual Interactive Simulation, TDBD24, Spring 2006 Lecture 6 Outline Cross product as matrix multiplication The collision matrix The Newton Coulomb impulse for rigid bodies N C updates of translational
Visual Interactive Simulation, TDBD24, Spring 2006 Lecture 6 Outline Cross product as matrix multiplication The collision matrix The Newton Coulomb impulse for rigid bodies N C updates of translational
A Ferris wheel in Japan has a radius of 50m and a mass of 1.2 x 10 6 kg. If a torque of 1 x 10 9 Nm is needed to turn the wheel when it starts at
 Option B Quiz 1. A Ferris wheel in Japan has a radius of 50m and a mass of 1. x 10 6 kg. If a torque of 1 x 10 9 Nm is needed to turn the wheel when it starts at rest, what is the wheel s angular acceleration?
Option B Quiz 1. A Ferris wheel in Japan has a radius of 50m and a mass of 1. x 10 6 kg. If a torque of 1 x 10 9 Nm is needed to turn the wheel when it starts at rest, what is the wheel s angular acceleration?