Inverse problems and uncertainty quantification in remote sensing
|
|
|
- Charity Marylou Gilmore
- 5 years ago
- Views:
Transcription
1 1 / 38 Inverse problems and uncertainty quantification in remote sensing Johanna Tamminen Finnish Meterological Institute johanna.tamminen@fmi.fi ESA Earth Observation Summer School on Earth System Monitoring and Modeling July 30 Aug 11, 2012, Frascati
2 2 / 38 Contents of the three lectures Monday: Introduction to inverse problems and uncertainty quantification in atmospheric remote sensing Tuesday: Introduction of Markov chain Monte Carlo method for estimating uncertainties Wednesday: More examples of how to characterize uncertainties in remote sensing (including modeling uncertainties)
3 3 / 38 Contents of this lecture Introduction to inverse problems in remote sensing Uncertainties and random variables Bayesian approach for solving inverse problems Example in atmospheric remote sensing: GOMOS

4 Satellite remote sensing Satellite remote sensing has become an important way to monitor and study our environment. Land, vegetation, oceans, snow, ice, atmosphere,... Global observations from pole to pole Continous observations Operational need for data: monitoring, forecasting, support in emergency situations,... Support for monitoring the effects of international regulations, support for decision making... Research: continous time series, combination of measurements, comparison with models... 4 / 38
 Phyiscal modeling of the measurements often complicated: typically")
5 5 / 38 Satellite remote sensing and inverse problems Remote sensing measurements are typically non-direct measurements Data processing involves solving inverse problems (data retrieval) Phyiscal modeling of the measurements often complicated: typically nonlinear
6 6 / 38 Retrieval in practice Operative algorithms need to be fast, robust, reliable Often simplifications and assumptions are needed Typically also additional information needed for solving the problem (ill posed problem). Important to characterize the uncertainties and validity of the simplifications and assumption Uncertainty Quantification (UQ)
7 7 / 38 Uncertainty Quantification (UQ) Uncertainty quantification: characterizing the errors and uncertainties reduction of the uncertainties, if possible UQ is becoming more and more important in environmental sciences. In remote sensing UQ is particularly important for: Combining data from different sources Assimilation Comparing with models Model discrepancy Time series analysis, trends Supporting decision making Forecasting UQ growing area of research: theory, computational methods, simulations
8 8 / 38 This lecture series: UQ using Bayesian approach Bayesian formulation gives natural tools to characterize the impact of different errorr sources. Allowes including additional information to the retrieval in a natural way. In atmospheric remote sensing method called Optimal Estimation -algorithm by C. Rodgers used extensively which is based on Bayesian formulation
9 9 / 38 Forwad problem y = f (x) where y IR m unknown variable x IR n measurements, known paramteres f function describing the relationship between the unknown variable and known parameters
10 10 / 38 Inverse problem y = f (x, b) where y IR m measurements, observations, data x IR n unknown parameters (unknown state) which we are interested f function describing the relationship between the measurements and the unknown parameters (forward model) b known model parameters
11 11 / 38 Linear case - example Inverse problem: find x when y is measured and y = f (x) When the dependence f is linear, we can describe the problem with matrix formulation: y = Ax where A is m n matrix Simple solution would now be x = A [ 1] y where A [ 1] would be in some sense the inverse of matrix A. In practice it is often more complicated.
12 12 / 38 Well posed and ill-posed problems Hadmard s definition (1902) of a well posed problem: (i) The solution exists. (ii) The solution is unique. (iii) The solution hardly changes if the parameters (or initial conditions) are slightly changed. If at least one of the criteria above is not fulfilled the problem is sayd to be ill-posed. In remote sensing the problems are typically ill-posed as there is not enough data to result unique solutions. Therefore we need additional information to solve the problem.
13 13 / 38 Solving an ill-posed problem Typcal ways of introducing additional information to inverse problems: Decreasing the size of the problem: discretization Regularization methods (eg. Tikhonov regularization: assuming smoothness) Bayesian approach: describing previous knowledge as a priori information
 y = f")

14 14 / 38 Measurement error, noise In practice measurements include always noise (ε) y = f (x) + ε (assuming that nose is additive) By repeating the measuremenets we get different answers

15 15 / 38 Measurements as random variables It is natural to consider measurements as random variables. Intuitively Random variables get probable values often and less probable values only occasionally. These realizations form a distribution. Let X be a random variable. The distribution π of its realisations can be described as an integral π π X (A) = P{X A} = p(x)dx where p(x) is the probablility density function (pdf) of the random variable X. A
16 Gaussian distributions: 1D Gaussian (Normal) distribution (N(µ, σ 2 )) with mean µ and covariance matrix C has pdf p(x) = ( 1 exp 1 2πσ 2 2 (x µ) 2 ) σ 2 Multivariate Gaussian distribution (N(µ, C)) The n dimensional multivariate Gaussian distribution with mean µ and covariance matrix C has pdf p(x) = (2π) n/2 C n/2 e 1 2 (x µ) C 1 (x µ) where C is n n positive definite symmetric matrix. If the components are independent, with C = σ 2 I, then the density simplifies to p(x) = (2π) n/2 σ n e 1 2 ( ) ni=1 xi µ 2 i σ 16 / 38
17 17 / 38 Statistical inverse problem Because the measurements are random variables it is natural to consider also the unknown X as a random variable. Now the inverse problem is to search for the conditional distribution of X assuming that measurement Y = y: π X Y (A) = P{X A Y = y} = p(x y) dx where p(x y) is the pdf of the conditional distribution. The pdf p(x y) describes the probability that unknown X = x when the measurement Y = y This is what we are looking for! A
18 18 / 38 Conditional probability According to elementary probability calculation: Joint probability that both events A and B take place P(A B) = P(A B)P(B) Now conditional probability is: P(A B) = P(A B) P(B) = P(B A)P(A) P(B) asuming that P(B) 0.
19 Bayesian solution to an inverse problem The same idea of elementary probabity is used in Bayesian solution to an inverse problem. Bayes formula where p(x y) = p lh(y x) p pr (x) p(y) p(x y) is the pdf of a posteriori distribution p pr (x) is the pdf of a priori distribution. Describes prior knowledge of x. p lh (y x) is the pdf of the likelihood distribution. Characterizes the dependence of the measurements on the unknown. p(y) 0 is a scaling factor (constant) 19 / 38
20 20 / 38 The scaling factor is obtained by integrating over the state space: p(y) = p lh (y x)p pr (x)dx It is typically not considered, but we will come back to this later in the lectures.
21 21 / 38 A posteriori distribution The Bayes formula p(x y) = p lh(y x) p pr (x) p(y) describes the solution of an inverse problem Natural way for using all available information: how to combine new measurements with our old prior knowledge (p(x) p(x y)) The solution is a distribution p(x) p(x y) p(y x)
22 Toy examples of 2-dimensional posterior distributions 22 / 38
23 23 / 38 How to characterize solution which is a distribution? Maximum a posteriori (MAP) estimate - most probable value MAP = x = argmax{p(x y)} x Expectation x = IE X Y [x] = x p(x y) dx IR n The uncertainty of the estimates is described as the width of the distribution E[x] MAP p(x y) Shape of the distribution kth moment: IE X Y [(x x) k ] k = 2, variace k = 3, skewness k = 4, kurtosis
24 24 / 38 Linear inverse problem Linear problem: y = Ax + ε Assume Gaussian noise ε N(0, C y ) and prior information p pr (x) = N(x 0, C x0 ). In this special case the posterior distribution is also normally distributed p(x y) e 1 2 (x x)t Q(x x), where the the expectation and the covariance matrix are: x = Q 1 (Cx 1 0 x 0 + A T Cy 1 y), Q 1 = (Cx A T Cy 1 A) 1. In this case the posterior estimate x = x and the posterior covariance matrix C x = Q 1 fully describe the posterior distribution.
25 25 / 38 MAP and ML estimate p(x y) p(y x)p(x) Assume non-informative prior distribution p(x) = c Now maximum a posteriori (MAP) estimate is the same as Maximum likelihood estimate (ML) MAP = argmax x {p(x y)} = argmax{p(y x)} = ML x In natural sciences non-informative prior is often attractive as it allows solutions that are purely based on measurements. However, there are often non-physical solutions that shoud not be taken into account, like positivity.
26 Special case: Gaussian noise Assume additive, normally distributed measurement noise ε N(0, C y ) The likelihood function 1 p lh (y x) = exp( 1 (2π) m 2 C y 2 (f (x) y)t Cy 1 (f (x) y)). Assuming non-informative prior density the posterior distribution is proportional to the likelihood function only: p(x y) p(y x), and the MAP estimate ˆx equals with ML estimate which further equals with the one that minimizes the sum of squared residuals function SSR(x) = (f (x) y) T C 1 (f (x) y). y This formula has been the basis for the traditional parameter estimation, which concentrates simply on minimizing the SSR function (least squares solution). 26 / 38
27 27 / 38 In practice... Prior: Typically, prior information is defined as Gaussian for simplifying computations. In linear Gaussian case the problem reduces to simply solving weighted least squares problem. Non-linear and/or non-gaussian problems. Typically assumed that solution is close to Gaussian.
28 28 / 38 Different techniques to solve nonlinear/non-gaussian problems Linearization and Gaussian assumption: Linearize the problem. If noise after linarization is close to Gaussian then linear Gaussian theory and simple matrix inversions can be applied (assuming that prior is also Gaussian).
29 29 / 38 Non-linear optimization - seaching for maximum a posteriori (MAP) or maximum likelihood (ML) estimate: Iterative methods to search for MAP (ML) and assume linearity around estimate. Approximate uncertainty with covariance matrix. Some commonly used methods: Levenberg-Marquardt iterative algorithm. (See eg. Press et al. Numerical Recipes. The art of scientific computing). Combination of steepst descent (gradient) and Newtonian iteration (approximation with quadratic function). Ready made algorithms are available. MAP (ML) estimate ˆx is computed. Posterior is assumed to be Gaussian close to estimate ˆx and posterior covariance matrix C ˆx is computed. In atmospheric research typically used iteratively method called Optimal estimation which is based on Bayes theorem. (See Rodgers 2001: Inverse methods for atmospheric sounding)

30 GOMOS/Envisat: Stellar occultation instrument GOMOS - Global Ozone Monitoring by Occultation of Stars One of the three atmospheric instruments on-board ESA s Envisat satellite Launched 2002 Measurements till April 2012 when Envisat lost connection to Earth. Measurement principle Fingerprints of atmospheric gases in transmission spectra stellar occultations/orbit ray path measurements/star from 100 km down to 10 km. Self-calibrating T λ,l = I λ,l I star λ 30 / 38
")
31 Cross sections of gases relevant to GOMOS (UV-VIS) 31 / 38

32 32 / 38 Absorption by gases Transmission spectra measured by GOMOS at descinding altitudes from 100 km down to 5 km.
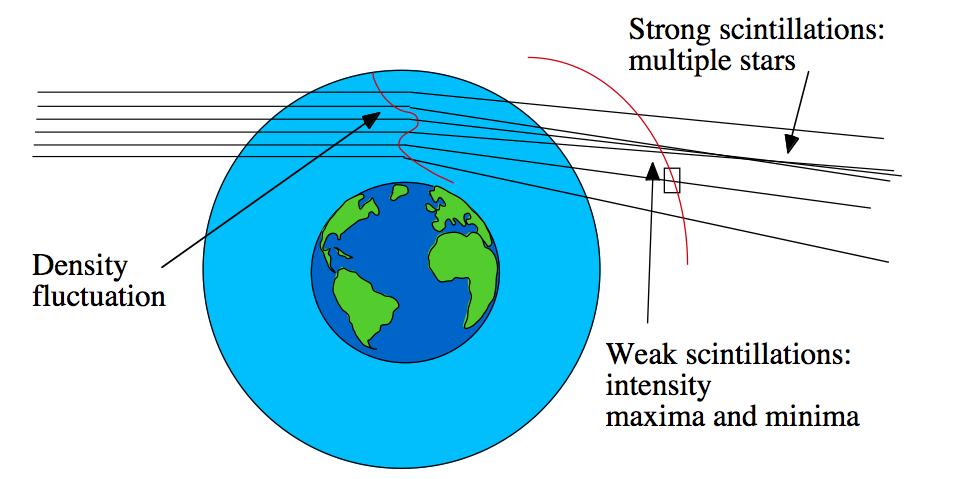
33 Refraction 33 / 38
34 34 / 38 Modelling The transmission at wavelength λ, along the ray path l, includes Tλ,l abs due to absorption and scattering by gases and Tλ,l ref due to refractive attenuation and scintillation. Tλ,l abs is given by the Beer s law, Tλ,l abs = exp (z(s))ρgas (z(s))ds l gas α gas λ where the integral is over the ray path l. The temperature dependent cross sections α gas are assumed to be known from laboratory measurements. The inversion problem is to estimate the gas profiles ρ gas (z) from the measurements y λ,l = T abs λ,l T ref λ,l + ɛ λ,l.
35 Operational algorithm: Assumptions Model: T abs λ,l (ρ) = exp l gas α gas λ From now on we consider data to be simply: y λ,l = T abs λ,l + ɛ λ,l. (z(s))ρgas (z(s))ds where λ = λ 1,..., λ, l = l 1,... l M Noise Gaussian, uncorrelated between different altitudes and wavelengths., scintillation and dilution, obtained from separate measurements (scintillation/turbulence effects not fully corrected). Temperature dependence of cross sections can be modelled with effective cross sections (only wavelength dependence) Temperature obtained from ECMWF T ref λ,l 35 / 38
36 36 / 38 Operational two step algorithm Since the cross sections are assumed constant on each ray path and noise uncorrelated, the inversion separates into [ Tλ,l abs = exp ] α gas λ,l Ngas l, λ = λ 1,..., λ, gas with N gas l = l ρ gas (z(s))ds, l = l 1,..., l M. Two step approach: Spectral inversion - retrieval of horizontally integrated densities of several constituents but each altitude separately Vertical inversion - retrieval of full profile for each constituent separately
37 37 / 38 Spectral inversion The line density vector N l = (N gas l ), gas = 1,..., n gas with the posterior density P(N l y l ) e 1 2 (T l(n l ) y l )C 1 l (T l (N l ) y l ) p(n l ), is fitted to the spectral data y l = (y λ,l ), C l = diag(σ 2 λ,l ), λ = 1,...,, separately for each ray path l. Prior: Fixed prior for neutral density from ECMWF. For gases and aerosols non-informative prior Non-linear problem solved iteratievely using Levenber-Marquard algorithm. MAP (=ML) estimate N l obtained with uncertainty described by its covariance matrix C Nl for all ray paths (altitudes) l
38 38 / 38 Pointestimate demo BLUE - GOMOS measurement RED - GOMOS iterative fit
Markov chain Monte Carlo methods in atmospheric remote sensing
 1 / 45 Markov chain Monte Carlo methods in atmospheric remote sensing Johanna Tamminen johanna.tamminen@fmi.fi ESA Summer School on Earth System Monitoring and Modeling July 3 Aug 11, 212, Frascati July,
1 / 45 Markov chain Monte Carlo methods in atmospheric remote sensing Johanna Tamminen johanna.tamminen@fmi.fi ESA Summer School on Earth System Monitoring and Modeling July 3 Aug 11, 212, Frascati July,
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING. Inversion basics. Erkki Kyrölä Finnish Meteorological Institute
 Inversion basics y = Kx + ε x ˆ = (K T K) 1 K T y Erkki Kyrölä Finnish Meteorological Institute Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 1 Contents 1. Introduction: Measurements, models, inversion
Inversion basics y = Kx + ε x ˆ = (K T K) 1 K T y Erkki Kyrölä Finnish Meteorological Institute Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 1 Contents 1. Introduction: Measurements, models, inversion
UV/VIS Limb Retrieval
 UV/VIS Limb Retrieval Erkki Kyrölä Finnish Meteorological Institute 1. Data selection 2. Forward and inverse possibilities 3. Occultation: GOMOS inversion 4. Limb scattering: OSIRIS inversion 5. Summary
UV/VIS Limb Retrieval Erkki Kyrölä Finnish Meteorological Institute 1. Data selection 2. Forward and inverse possibilities 3. Occultation: GOMOS inversion 4. Limb scattering: OSIRIS inversion 5. Summary
AEROSOL MODEL SELECTION AND UNCERTAINTY MODELLING BY RJMCMC TECHNIQUE
 AEROSOL MODEL SELECTION AND UNCERTAINTY MODELLING BY RJMCMC TECHNIQUE Marko Laine 1, Johanna Tamminen 1, Erkki Kyrölä 1, and Heikki Haario 2 1 Finnish Meteorological Institute, Helsinki, Finland 2 Lappeenranta
AEROSOL MODEL SELECTION AND UNCERTAINTY MODELLING BY RJMCMC TECHNIQUE Marko Laine 1, Johanna Tamminen 1, Erkki Kyrölä 1, and Heikki Haario 2 1 Finnish Meteorological Institute, Helsinki, Finland 2 Lappeenranta
Markov chain Monte Carlo methods for high dimensional inversion in remote sensing
 J. R. Statist. Soc. B (04) 66, Part 3, pp. 591 7 Markov chain Monte Carlo methods for high dimensional inversion in remote sensing H. Haario and M. Laine, University of Helsinki, Finland M. Lehtinen, University
J. R. Statist. Soc. B (04) 66, Part 3, pp. 591 7 Markov chain Monte Carlo methods for high dimensional inversion in remote sensing H. Haario and M. Laine, University of Helsinki, Finland M. Lehtinen, University
GOMOS data characterisation and error estimation
 Atmos. Chem. Phys.,, 95 959, www.atmos-chem-phys.net//95// doi:.594/acp--95- Author(s). CC Attribution 3. License. Atmospheric Chemistry and Physics GOMOS data characterisation and error estimation J.
Atmos. Chem. Phys.,, 95 959, www.atmos-chem-phys.net//95// doi:.594/acp--95- Author(s). CC Attribution 3. License. Atmospheric Chemistry and Physics GOMOS data characterisation and error estimation J.
PATTERN RECOGNITION AND MACHINE LEARNING
 PATTERN RECOGNITION AND MACHINE LEARNING Chapter 1. Introduction Shuai Huang April 21, 2014 Outline 1 What is Machine Learning? 2 Curve Fitting 3 Probability Theory 4 Model Selection 5 The curse of dimensionality
PATTERN RECOGNITION AND MACHINE LEARNING Chapter 1. Introduction Shuai Huang April 21, 2014 Outline 1 What is Machine Learning? 2 Curve Fitting 3 Probability Theory 4 Model Selection 5 The curse of dimensionality
Consider the joint probability, P(x,y), shown as the contours in the figure above. P(x) is given by the integral of P(x,y) over all values of y.
, shown as the contours in the figure above. P(x) is given by the integral of P(x,y) over all values of y.") ATMO/OPTI 656b Spring 009 Bayesian Retrievals Note: This follows the discussion in Chapter of Rogers (000) As we have seen, the problem with the nadir viewing emission measurements is they do not contain
ATMO/OPTI 656b Spring 009 Bayesian Retrievals Note: This follows the discussion in Chapter of Rogers (000) As we have seen, the problem with the nadir viewing emission measurements is they do not contain
Fundamentals of Data Assimila1on
 014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Bayesian Methods and Uncertainty Quantification for Nonlinear Inverse Problems
 Bayesian Methods and Uncertainty Quantification for Nonlinear Inverse Problems John Bardsley, University of Montana Collaborators: H. Haario, J. Kaipio, M. Laine, Y. Marzouk, A. Seppänen, A. Solonen, Z.
Bayesian Methods and Uncertainty Quantification for Nonlinear Inverse Problems John Bardsley, University of Montana Collaborators: H. Haario, J. Kaipio, M. Laine, Y. Marzouk, A. Seppänen, A. Solonen, Z.
Estimation Theory. as Θ = (Θ 1,Θ 2,...,Θ m ) T. An estimator
 T. An estimator") Estimation Theory Estimation theory deals with finding numerical values of interesting parameters from given set of data. We start with formulating a family of models that could describe how the data were
Estimation Theory Estimation theory deals with finding numerical values of interesting parameters from given set of data. We start with formulating a family of models that could describe how the data were
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Gaussian Process Approximations of Stochastic Differential Equations
 Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
ISTINA - : Investigation of Sensitivity Tendencies and Inverse Numerical Algorithm advances in aerosol remote sensing
 STNA - : nvestigation of Sensitivity Tendencies and nverse Numerical Algorithm advances in aerosol remote sensing B. Torres, O. Dubovik, D. Fuertes, and P. Litvinov GRASP- SAS, LOA, Universite Lille-1,
STNA - : nvestigation of Sensitivity Tendencies and nverse Numerical Algorithm advances in aerosol remote sensing B. Torres, O. Dubovik, D. Fuertes, and P. Litvinov GRASP- SAS, LOA, Universite Lille-1,
Retrieval problems in Remote Sensing
 Maarten Krol August 2006 m.c.krol@phys.uu.nl 1. Goal To show that remote sensing is an indirect measurement, i.e. that we do not measure directly, but by means of (for instance) electromagnetic radiation
Maarten Krol August 2006 m.c.krol@phys.uu.nl 1. Goal To show that remote sensing is an indirect measurement, i.e. that we do not measure directly, but by means of (for instance) electromagnetic radiation
Inverse Theory. COST WaVaCS Winterschool Venice, February Stefan Buehler Luleå University of Technology Kiruna
 Inverse Theory COST WaVaCS Winterschool Venice, February 2011 Stefan Buehler Luleå University of Technology Kiruna Overview Inversion 1 The Inverse Problem 2 Simple Minded Approach (Matrix Inversion) 3
Inverse Theory COST WaVaCS Winterschool Venice, February 2011 Stefan Buehler Luleå University of Technology Kiruna Overview Inversion 1 The Inverse Problem 2 Simple Minded Approach (Matrix Inversion) 3
Machine Learning Overview
 Machine Learning Overview Sargur N. Srihari University at Buffalo, State University of New York USA 1 Outline 1. What is Machine Learning (ML)? 2. Types of Information Processing Problems Solved 1. Regression
Machine Learning Overview Sargur N. Srihari University at Buffalo, State University of New York USA 1 Outline 1. What is Machine Learning (ML)? 2. Types of Information Processing Problems Solved 1. Regression
Inference and estimation in probabilistic time series models
 1 Inference and estimation in probabilistic time series models David Barber, A Taylan Cemgil and Silvia Chiappa 11 Time series The term time series refers to data that can be represented as a sequence
1 Inference and estimation in probabilistic time series models David Barber, A Taylan Cemgil and Silvia Chiappa 11 Time series The term time series refers to data that can be represented as a sequence
4. DATA ASSIMILATION FUNDAMENTALS
 4. DATA ASSIMILATION FUNDAMENTALS... [the atmosphere] "is a chaotic system in which errors introduced into the system can grow with time... As a consequence, data assimilation is a struggle between chaotic
4. DATA ASSIMILATION FUNDAMENTALS... [the atmosphere] "is a chaotic system in which errors introduced into the system can grow with time... As a consequence, data assimilation is a struggle between chaotic
B4 Estimation and Inference
 B4 Estimation and Inference 6 Lectures Hilary Term 27 2 Tutorial Sheets A. Zisserman Overview Lectures 1 & 2: Introduction sensors, and basics of probability density functions for representing sensor error
B4 Estimation and Inference 6 Lectures Hilary Term 27 2 Tutorial Sheets A. Zisserman Overview Lectures 1 & 2: Introduction sensors, and basics of probability density functions for representing sensor error
Variational data assimilation
 Background and methods NCEO, Dept. of Meteorology, Univ. of Reading 710 March 2018, Univ. of Reading Bayes' Theorem Bayes' Theorem p(x y) = posterior distribution = p(x) p(y x) p(y) prior distribution
Background and methods NCEO, Dept. of Meteorology, Univ. of Reading 710 March 2018, Univ. of Reading Bayes' Theorem Bayes' Theorem p(x y) = posterior distribution = p(x) p(y x) p(y) prior distribution
Short tutorial on data assimilation
 Mitglied der Helmholtz-Gemeinschaft Short tutorial on data assimilation 23 June 2015 Wolfgang Kurtz & Harrie-Jan Hendricks Franssen Institute of Bio- and Geosciences IBG-3 (Agrosphere), Forschungszentrum
Mitglied der Helmholtz-Gemeinschaft Short tutorial on data assimilation 23 June 2015 Wolfgang Kurtz & Harrie-Jan Hendricks Franssen Institute of Bio- and Geosciences IBG-3 (Agrosphere), Forschungszentrum
Covariance Matrix Simplification For Efficient Uncertainty Management
 PASEO MaxEnt 2007 Covariance Matrix Simplification For Efficient Uncertainty Management André Jalobeanu, Jorge A. Gutiérrez PASEO Research Group LSIIT (CNRS/ Univ. Strasbourg) - Illkirch, France *part
PASEO MaxEnt 2007 Covariance Matrix Simplification For Efficient Uncertainty Management André Jalobeanu, Jorge A. Gutiérrez PASEO Research Group LSIIT (CNRS/ Univ. Strasbourg) - Illkirch, France *part
David Giles Bayesian Econometrics
 David Giles Bayesian Econometrics 1. General Background 2. Constructing Prior Distributions 3. Properties of Bayes Estimators and Tests 4. Bayesian Analysis of the Multiple Regression Model 5. Bayesian
David Giles Bayesian Econometrics 1. General Background 2. Constructing Prior Distributions 3. Properties of Bayes Estimators and Tests 4. Bayesian Analysis of the Multiple Regression Model 5. Bayesian
Lecture 2: Repetition of probability theory and statistics
 Algorithms for Uncertainty Quantification SS8, IN2345 Tobias Neckel Scientific Computing in Computer Science TUM Lecture 2: Repetition of probability theory and statistics Concept of Building Block: Prerequisites:
Algorithms for Uncertainty Quantification SS8, IN2345 Tobias Neckel Scientific Computing in Computer Science TUM Lecture 2: Repetition of probability theory and statistics Concept of Building Block: Prerequisites:
Introduction to Bayesian methods in inverse problems
 Introduction to Bayesian methods in inverse problems Ville Kolehmainen 1 1 Department of Applied Physics, University of Eastern Finland, Kuopio, Finland March 4 2013 Manchester, UK. Contents Introduction
Introduction to Bayesian methods in inverse problems Ville Kolehmainen 1 1 Department of Applied Physics, University of Eastern Finland, Kuopio, Finland March 4 2013 Manchester, UK. Contents Introduction
Introduction to Systems Analysis and Decision Making Prepared by: Jakub Tomczak
 Introduction to Systems Analysis and Decision Making Prepared by: Jakub Tomczak 1 Introduction. Random variables During the course we are interested in reasoning about considered phenomenon. In other words,
Introduction to Systems Analysis and Decision Making Prepared by: Jakub Tomczak 1 Introduction. Random variables During the course we are interested in reasoning about considered phenomenon. In other words,
Machine Learning Srihari. Probability Theory. Sargur N. Srihari
 Probability Theory Sargur N. Srihari srihari@cedar.buffalo.edu 1 Probability Theory with Several Variables Key concept is dealing with uncertainty Due to noise and finite data sets Framework for quantification
Probability Theory Sargur N. Srihari srihari@cedar.buffalo.edu 1 Probability Theory with Several Variables Key concept is dealing with uncertainty Due to noise and finite data sets Framework for quantification
Estimation theory. Parametric estimation. Properties of estimators. Minimum variance estimator. Cramer-Rao bound. Maximum likelihood estimators
 Estimation theory Parametric estimation Properties of estimators Minimum variance estimator Cramer-Rao bound Maximum likelihood estimators Confidence intervals Bayesian estimation 1 Random Variables Let
Estimation theory Parametric estimation Properties of estimators Minimum variance estimator Cramer-Rao bound Maximum likelihood estimators Confidence intervals Bayesian estimation 1 Random Variables Let
Algorithms for Uncertainty Quantification
 Algorithms for Uncertainty Quantification Tobias Neckel, Ionuț-Gabriel Farcaș Lehrstuhl Informatik V Summer Semester 2017 Lecture 2: Repetition of probability theory and statistics Example: coin flip Example
Algorithms for Uncertainty Quantification Tobias Neckel, Ionuț-Gabriel Farcaș Lehrstuhl Informatik V Summer Semester 2017 Lecture 2: Repetition of probability theory and statistics Example: coin flip Example
Chapter 3: Maximum-Likelihood & Bayesian Parameter Estimation (part 1)
") HW 1 due today Parameter Estimation Biometrics CSE 190 Lecture 7 Today s lecture was on the blackboard. These slides are an alternative presentation of the material. CSE190, Winter10 CSE190, Winter10 Chapter
HW 1 due today Parameter Estimation Biometrics CSE 190 Lecture 7 Today s lecture was on the blackboard. These slides are an alternative presentation of the material. CSE190, Winter10 CSE190, Winter10 Chapter
Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen. Bayesian Learning. Tobias Scheffer, Niels Landwehr
 Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen Bayesian Learning Tobias Scheffer, Niels Landwehr Remember: Normal Distribution Distribution over x. Density function with parameters
Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen Bayesian Learning Tobias Scheffer, Niels Landwehr Remember: Normal Distribution Distribution over x. Density function with parameters
Naïve Bayes classification. p ij 11/15/16. Probability theory. Probability theory. Probability theory. X P (X = x i )=1 i. Marginal Probability
=1 i. Marginal Probability") Probability theory Naïve Bayes classification Random variable: a variable whose possible values are numerical outcomes of a random phenomenon. s: A person s height, the outcome of a coin toss Distinguish
Probability theory Naïve Bayes classification Random variable: a variable whose possible values are numerical outcomes of a random phenomenon. s: A person s height, the outcome of a coin toss Distinguish
Physics 403. Segev BenZvi. Propagation of Uncertainties. Department of Physics and Astronomy University of Rochester
 Physics 403 Propagation of Uncertainties Segev BenZvi Department of Physics and Astronomy University of Rochester Table of Contents 1 Maximum Likelihood and Minimum Least Squares Uncertainty Intervals
Physics 403 Propagation of Uncertainties Segev BenZvi Department of Physics and Astronomy University of Rochester Table of Contents 1 Maximum Likelihood and Minimum Least Squares Uncertainty Intervals
{ p if x = 1 1 p if x = 0
 Discrete random variables Probability mass function Given a discrete random variable X taking values in X = {v 1,..., v m }, its probability mass function P : X [0, 1] is defined as: P (v i ) = Pr[X =
Discrete random variables Probability mass function Given a discrete random variable X taking values in X = {v 1,..., v m }, its probability mass function P : X [0, 1] is defined as: P (v i ) = Pr[X =
Probabilistic Graphical Models
 Probabilistic Graphical Models Introduction. Basic Probability and Bayes Volkan Cevher, Matthias Seeger Ecole Polytechnique Fédérale de Lausanne 26/9/2011 (EPFL) Graphical Models 26/9/2011 1 / 28 Outline
Probabilistic Graphical Models Introduction. Basic Probability and Bayes Volkan Cevher, Matthias Seeger Ecole Polytechnique Fédérale de Lausanne 26/9/2011 (EPFL) Graphical Models 26/9/2011 1 / 28 Outline
Gaussian Processes for Machine Learning
 Gaussian Processes for Machine Learning Carl Edward Rasmussen Max Planck Institute for Biological Cybernetics Tübingen, Germany carl@tuebingen.mpg.de Carlos III, Madrid, May 2006 The actual science of
Gaussian Processes for Machine Learning Carl Edward Rasmussen Max Planck Institute for Biological Cybernetics Tübingen, Germany carl@tuebingen.mpg.de Carlos III, Madrid, May 2006 The actual science of
p(z)
") Chapter Statistics. Introduction This lecture is a quick review of basic statistical concepts; probabilities, mean, variance, covariance, correlation, linear regression, probability density functions and
Chapter Statistics. Introduction This lecture is a quick review of basic statistical concepts; probabilities, mean, variance, covariance, correlation, linear regression, probability density functions and
Lecture 3: Pattern Classification
 EE E6820: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 1 2 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mixtures
EE E6820: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 1 2 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mixtures
Introduction to Machine Learning. Maximum Likelihood and Bayesian Inference. Lecturers: Eran Halperin, Yishay Mansour, Lior Wolf
 1 Introduction to Machine Learning Maximum Likelihood and Bayesian Inference Lecturers: Eran Halperin, Yishay Mansour, Lior Wolf 2013-14 We know that X ~ B(n,p), but we do not know p. We get a random sample
1 Introduction to Machine Learning Maximum Likelihood and Bayesian Inference Lecturers: Eran Halperin, Yishay Mansour, Lior Wolf 2013-14 We know that X ~ B(n,p), but we do not know p. We get a random sample
Gaussian processes. Chuong B. Do (updated by Honglak Lee) November 22, 2008
 November 22, 2008") Gaussian processes Chuong B Do (updated by Honglak Lee) November 22, 2008 Many of the classical machine learning algorithms that we talked about during the first half of this course fit the following pattern:
Gaussian processes Chuong B Do (updated by Honglak Lee) November 22, 2008 Many of the classical machine learning algorithms that we talked about during the first half of this course fit the following pattern:
Naïve Bayes classification
 Naïve Bayes classification 1 Probability theory Random variable: a variable whose possible values are numerical outcomes of a random phenomenon. Examples: A person s height, the outcome of a coin toss
Naïve Bayes classification 1 Probability theory Random variable: a variable whose possible values are numerical outcomes of a random phenomenon. Examples: A person s height, the outcome of a coin toss
Spatial Statistics with Image Analysis. Outline. A Statistical Approach. Johan Lindström 1. Lund October 6, 2016
 Spatial Statistics Spatial Examples More Spatial Statistics with Image Analysis Johan Lindström 1 1 Mathematical Statistics Centre for Mathematical Sciences Lund University Lund October 6, 2016 Johan Lindström
Spatial Statistics Spatial Examples More Spatial Statistics with Image Analysis Johan Lindström 1 1 Mathematical Statistics Centre for Mathematical Sciences Lund University Lund October 6, 2016 Johan Lindström
Machine Learning. Lecture 4: Regularization and Bayesian Statistics. Feng Li. https://funglee.github.io
 Machine Learning Lecture 4: Regularization and Bayesian Statistics Feng Li fli@sdu.edu.cn https://funglee.github.io School of Computer Science and Technology Shandong University Fall 207 Overfitting Problem
Machine Learning Lecture 4: Regularization and Bayesian Statistics Feng Li fli@sdu.edu.cn https://funglee.github.io School of Computer Science and Technology Shandong University Fall 207 Overfitting Problem
Overfitting, Bias / Variance Analysis
 Overfitting, Bias / Variance Analysis Professor Ameet Talwalkar Professor Ameet Talwalkar CS260 Machine Learning Algorithms February 8, 207 / 40 Outline Administration 2 Review of last lecture 3 Basic
Overfitting, Bias / Variance Analysis Professor Ameet Talwalkar Professor Ameet Talwalkar CS260 Machine Learning Algorithms February 8, 207 / 40 Outline Administration 2 Review of last lecture 3 Basic
Inverse Problems, Information Content and Stratospheric Aerosols
 Inverse Problems, Information Content and Stratospheric Aerosols May 22, 214 Table of contents 1 Inverse Problems 2 Aerosols 3 OSIRIS 4 Information Content 5 Non-Linear Techniques 6 Results Inverse Problems
Inverse Problems, Information Content and Stratospheric Aerosols May 22, 214 Table of contents 1 Inverse Problems 2 Aerosols 3 OSIRIS 4 Information Content 5 Non-Linear Techniques 6 Results Inverse Problems
Lecture 4: State Estimation in Hidden Markov Models (cont.)
") EE378A Statistical Signal Processing Lecture 4-04/13/2017 Lecture 4: State Estimation in Hidden Markov Models (cont.) Lecturer: Tsachy Weissman Scribe: David Wugofski In this lecture we build on previous
EE378A Statistical Signal Processing Lecture 4-04/13/2017 Lecture 4: State Estimation in Hidden Markov Models (cont.) Lecturer: Tsachy Weissman Scribe: David Wugofski In this lecture we build on previous
Brandon C. Kelly (Harvard Smithsonian Center for Astrophysics)
") Brandon C. Kelly (Harvard Smithsonian Center for Astrophysics) Probability quantifies randomness and uncertainty How do I estimate the normalization and logarithmic slope of a X ray continuum, assuming
Brandon C. Kelly (Harvard Smithsonian Center for Astrophysics) Probability quantifies randomness and uncertainty How do I estimate the normalization and logarithmic slope of a X ray continuum, assuming
Strong Lens Modeling (II): Statistical Methods
: Statistical Methods") Strong Lens Modeling (II): Statistical Methods Chuck Keeton Rutgers, the State University of New Jersey Probability theory multiple random variables, a and b joint distribution p(a, b) conditional distribution
Strong Lens Modeling (II): Statistical Methods Chuck Keeton Rutgers, the State University of New Jersey Probability theory multiple random variables, a and b joint distribution p(a, b) conditional distribution
Bayesian Machine Learning
 Bayesian Machine Learning Andrew Gordon Wilson ORIE 6741 Lecture 2: Bayesian Basics https://people.orie.cornell.edu/andrew/orie6741 Cornell University August 25, 2016 1 / 17 Canonical Machine Learning
Bayesian Machine Learning Andrew Gordon Wilson ORIE 6741 Lecture 2: Bayesian Basics https://people.orie.cornell.edu/andrew/orie6741 Cornell University August 25, 2016 1 / 17 Canonical Machine Learning
Intro to Probability. Andrei Barbu
 Intro to Probability Andrei Barbu Some problems Some problems A means to capture uncertainty Some problems A means to capture uncertainty You have data from two sources, are they different? Some problems
Intro to Probability Andrei Barbu Some problems Some problems A means to capture uncertainty Some problems A means to capture uncertainty You have data from two sources, are they different? Some problems
EO Level1 Lessons learnt
 EO Level1 Lessons learnt GOMOS pointing accuracy G. Barrot June 10 11, 2013 ESRIN 1 GOMOS Global Ozone Monitoring by Occultation of Stars GOMOS instrument measures star spectra during star set (30-40 stars
EO Level1 Lessons learnt GOMOS pointing accuracy G. Barrot June 10 11, 2013 ESRIN 1 GOMOS Global Ozone Monitoring by Occultation of Stars GOMOS instrument measures star spectra during star set (30-40 stars
Introduction to Machine Learning
 Introduction to Machine Learning Introduction to Probabilistic Methods Varun Chandola Computer Science & Engineering State University of New York at Buffalo Buffalo, NY, USA chandola@buffalo.edu Chandola@UB
Introduction to Machine Learning Introduction to Probabilistic Methods Varun Chandola Computer Science & Engineering State University of New York at Buffalo Buffalo, NY, USA chandola@buffalo.edu Chandola@UB
Capabilities of IRS-MTG to sound ozone, CO and methane using ESA pre-phase A specifications
 Capabilities of IRS-MTG to sound ozone, CO and methane using ESA pre-phase A specifications Task 2: Ozone from a synergetic use of UV and IR radiances P. Coheur, C. Clerbaux, D. Hurtmans, J. Hadji-Lazaro,
Capabilities of IRS-MTG to sound ozone, CO and methane using ESA pre-phase A specifications Task 2: Ozone from a synergetic use of UV and IR radiances P. Coheur, C. Clerbaux, D. Hurtmans, J. Hadji-Lazaro,
Randomize-Then-Optimize: A Method for Sampling from Posterior Distributions in Nonlinear Inverse Problems
 Randomize-Then-Optimize: A Method for Sampling from Posterior Distributions in Nonlinear Inverse Problems The MIT Faculty has made this article openly available. Please share how this access benefits you.
Randomize-Then-Optimize: A Method for Sampling from Posterior Distributions in Nonlinear Inverse Problems The MIT Faculty has made this article openly available. Please share how this access benefits you.
Bayesian Inference for DSGE Models. Lawrence J. Christiano
 Bayesian Inference for DSGE Models Lawrence J. Christiano Outline State space-observer form. convenient for model estimation and many other things. Bayesian inference Bayes rule. Monte Carlo integation.
Bayesian Inference for DSGE Models Lawrence J. Christiano Outline State space-observer form. convenient for model estimation and many other things. Bayesian inference Bayes rule. Monte Carlo integation.
Formulas for probability theory and linear models SF2941
 Formulas for probability theory and linear models SF2941 These pages + Appendix 2 of Gut) are permitted as assistance at the exam. 11 maj 2008 Selected formulae of probability Bivariate probability Transforms
Formulas for probability theory and linear models SF2941 These pages + Appendix 2 of Gut) are permitted as assistance at the exam. 11 maj 2008 Selected formulae of probability Bivariate probability Transforms
ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering
 ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal:
ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal:
Validation of GOMOS High Resolution Temperature Profiles using Wavelet Analysis - Comparison with Thule Lidar Observations
 Validation of GOMOS High Resolution Temperature Profiles using Wavelet Analysis - Comparison with Thule Lidar Observations R. Q. Iannone 1, S. Casadio 1, A. di Sarra 2, G. Pace 2, T. Di Iorio 2, D. Meloni
Validation of GOMOS High Resolution Temperature Profiles using Wavelet Analysis - Comparison with Thule Lidar Observations R. Q. Iannone 1, S. Casadio 1, A. di Sarra 2, G. Pace 2, T. Di Iorio 2, D. Meloni
Introduction to Machine Learning. Maximum Likelihood and Bayesian Inference. Lecturers: Eran Halperin, Lior Wolf
 1 Introduction to Machine Learning Maximum Likelihood and Bayesian Inference Lecturers: Eran Halperin, Lior Wolf 2014-15 We know that X ~ B(n,p), but we do not know p. We get a random sample from X, a
1 Introduction to Machine Learning Maximum Likelihood and Bayesian Inference Lecturers: Eran Halperin, Lior Wolf 2014-15 We know that X ~ B(n,p), but we do not know p. We get a random sample from X, a
MCMC Sampling for Bayesian Inference using L1-type Priors
 MÜNSTER MCMC Sampling for Bayesian Inference using L1-type Priors (what I do whenever the ill-posedness of EEG/MEG is just not frustrating enough!) AG Imaging Seminar Felix Lucka 26.06.2012 , MÜNSTER Sampling
MÜNSTER MCMC Sampling for Bayesian Inference using L1-type Priors (what I do whenever the ill-posedness of EEG/MEG is just not frustrating enough!) AG Imaging Seminar Felix Lucka 26.06.2012 , MÜNSTER Sampling
Course outline, objectives, workload, projects, expectations
 Course outline, objectives, workload, projects, expectations Introductions Remote Sensing Overview Elements of a remote sensing observing system 1. platform (satellite, surface, etc) 2. experimental design
Course outline, objectives, workload, projects, expectations Introductions Remote Sensing Overview Elements of a remote sensing observing system 1. platform (satellite, surface, etc) 2. experimental design
(Extended) Kalman Filter
 Kalman Filter") (Extended) Kalman Filter Brian Hunt 7 June 2013 Goals of Data Assimilation (DA) Estimate the state of a system based on both current and all past observations of the system, using a model for the system
(Extended) Kalman Filter Brian Hunt 7 June 2013 Goals of Data Assimilation (DA) Estimate the state of a system based on both current and all past observations of the system, using a model for the system
Statistical Techniques in Robotics (16-831, F12) Lecture#17 (Wednesday October 31) Kalman Filters. Lecturer: Drew Bagnell Scribe:Greydon Foil 1
 Lecture#17 (Wednesday October 31) Kalman Filters. Lecturer: Drew Bagnell Scribe:Greydon Foil 1") Statistical Techniques in Robotics (16-831, F12) Lecture#17 (Wednesday October 31) Kalman Filters Lecturer: Drew Bagnell Scribe:Greydon Foil 1 1 Gauss Markov Model Consider X 1, X 2,...X t, X t+1 to be
Statistical Techniques in Robotics (16-831, F12) Lecture#17 (Wednesday October 31) Kalman Filters Lecturer: Drew Bagnell Scribe:Greydon Foil 1 1 Gauss Markov Model Consider X 1, X 2,...X t, X t+1 to be
Monday, Oct. 2: Clear-sky radiation; solar attenuation, Thermal. nomenclature
 Monday, Oct. 2: Clear-sky radiation; solar attenuation, Thermal nomenclature Sun Earth Y-axis: Spectral radiance, aka monochromatic intensity units: watts/(m^2*ster*wavelength) Blackbody curves provide
Monday, Oct. 2: Clear-sky radiation; solar attenuation, Thermal nomenclature Sun Earth Y-axis: Spectral radiance, aka monochromatic intensity units: watts/(m^2*ster*wavelength) Blackbody curves provide
Continuous Random Variables
 1 / 24 Continuous Random Variables Saravanan Vijayakumaran sarva@ee.iitb.ac.in Department of Electrical Engineering Indian Institute of Technology Bombay February 27, 2013 2 / 24 Continuous Random Variables
1 / 24 Continuous Random Variables Saravanan Vijayakumaran sarva@ee.iitb.ac.in Department of Electrical Engineering Indian Institute of Technology Bombay February 27, 2013 2 / 24 Continuous Random Variables
University of Cambridge Engineering Part IIB Module 3F3: Signal and Pattern Processing Handout 2:. The Multivariate Gaussian & Decision Boundaries
 University of Cambridge Engineering Part IIB Module 3F3: Signal and Pattern Processing Handout :. The Multivariate Gaussian & Decision Boundaries..15.1.5 1 8 6 6 8 1 Mark Gales mjfg@eng.cam.ac.uk Lent
University of Cambridge Engineering Part IIB Module 3F3: Signal and Pattern Processing Handout :. The Multivariate Gaussian & Decision Boundaries..15.1.5 1 8 6 6 8 1 Mark Gales mjfg@eng.cam.ac.uk Lent
MEASURING TRACE GAS PROFILES FROM SPACE
 MEASURING TRACE GAS PROFILES FROM SPACE Caroline Nowlan Atomic and Molecular Physics Division Harvard-Smithsonian Center for Astrophysics Collaborators: Kelly Chance, Xiong Liu, Gonzalo Gonzalez Abad,
MEASURING TRACE GAS PROFILES FROM SPACE Caroline Nowlan Atomic and Molecular Physics Division Harvard-Smithsonian Center for Astrophysics Collaborators: Kelly Chance, Xiong Liu, Gonzalo Gonzalez Abad,
Algorithmisches Lernen/Machine Learning
 Algorithmisches Lernen/Machine Learning Part 1: Stefan Wermter Introduction Connectionist Learning (e.g. Neural Networks) Decision-Trees, Genetic Algorithms Part 2: Norman Hendrich Support-Vector Machines
Algorithmisches Lernen/Machine Learning Part 1: Stefan Wermter Introduction Connectionist Learning (e.g. Neural Networks) Decision-Trees, Genetic Algorithms Part 2: Norman Hendrich Support-Vector Machines
Stratospheric aerosol profile retrieval from SCIAMACHY limb observations
 Stratospheric aerosol profile retrieval from SCIAMACHY limb observations Yang Jingmei Zong Xuemei Key Laboratory of Middle Atmosphere and Global Environment Observation (LAGEO), Institute of Atmospheric
Stratospheric aerosol profile retrieval from SCIAMACHY limb observations Yang Jingmei Zong Xuemei Key Laboratory of Middle Atmosphere and Global Environment Observation (LAGEO), Institute of Atmospheric
Probability theory. References:
 Reasoning Under Uncertainty References: Probability theory Mathematical methods in artificial intelligence, Bender, Chapter 7. Expert systems: Principles and programming, g, Giarratano and Riley, pag.
Reasoning Under Uncertainty References: Probability theory Mathematical methods in artificial intelligence, Bender, Chapter 7. Expert systems: Principles and programming, g, Giarratano and Riley, pag.
Density Estimation. Seungjin Choi
 Density Estimation Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr http://mlg.postech.ac.kr/
Density Estimation Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr http://mlg.postech.ac.kr/
EE4601 Communication Systems
 EE4601 Communication Systems Week 2 Review of Probability, Important Distributions 0 c 2011, Georgia Institute of Technology (lect2 1) Conditional Probability Consider a sample space that consists of two
EE4601 Communication Systems Week 2 Review of Probability, Important Distributions 0 c 2011, Georgia Institute of Technology (lect2 1) Conditional Probability Consider a sample space that consists of two
Expectation Propagation for Approximate Bayesian Inference
 Expectation Propagation for Approximate Bayesian Inference José Miguel Hernández Lobato Universidad Autónoma de Madrid, Computer Science Department February 5, 2007 1/ 24 Bayesian Inference Inference Given
Expectation Propagation for Approximate Bayesian Inference José Miguel Hernández Lobato Universidad Autónoma de Madrid, Computer Science Department February 5, 2007 1/ 24 Bayesian Inference Inference Given
COM336: Neural Computing
 COM336: Neural Computing http://www.dcs.shef.ac.uk/ sjr/com336/ Lecture 2: Density Estimation Steve Renals Department of Computer Science University of Sheffield Sheffield S1 4DP UK email: s.renals@dcs.shef.ac.uk
COM336: Neural Computing http://www.dcs.shef.ac.uk/ sjr/com336/ Lecture 2: Density Estimation Steve Renals Department of Computer Science University of Sheffield Sheffield S1 4DP UK email: s.renals@dcs.shef.ac.uk
Lecture : Probabilistic Machine Learning
 Lecture : Probabilistic Machine Learning Riashat Islam Reasoning and Learning Lab McGill University September 11, 2018 ML : Many Methods with Many Links Modelling Views of Machine Learning Machine Learning
Lecture : Probabilistic Machine Learning Riashat Islam Reasoning and Learning Lab McGill University September 11, 2018 ML : Many Methods with Many Links Modelling Views of Machine Learning Machine Learning
Bayesian Decision Theory
 Bayesian Decision Theory Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Fall 2017 CS 551, Fall 2017 c 2017, Selim Aksoy (Bilkent University) 1 / 46 Bayesian
Bayesian Decision Theory Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Fall 2017 CS 551, Fall 2017 c 2017, Selim Aksoy (Bilkent University) 1 / 46 Bayesian
Today. Probability and Statistics. Linear Algebra. Calculus. Naïve Bayes Classification. Matrix Multiplication Matrix Inversion
 Today Probability and Statistics Naïve Bayes Classification Linear Algebra Matrix Multiplication Matrix Inversion Calculus Vector Calculus Optimization Lagrange Multipliers 1 Classical Artificial Intelligence
Today Probability and Statistics Naïve Bayes Classification Linear Algebra Matrix Multiplication Matrix Inversion Calculus Vector Calculus Optimization Lagrange Multipliers 1 Classical Artificial Intelligence
Towards a Bayesian model for Cyber Security
 Towards a Bayesian model for Cyber Security Mark Briers (mbriers@turing.ac.uk) Joint work with Henry Clausen and Prof. Niall Adams (Imperial College London) 27 September 2017 The Alan Turing Institute
Towards a Bayesian model for Cyber Security Mark Briers (mbriers@turing.ac.uk) Joint work with Henry Clausen and Prof. Niall Adams (Imperial College London) 27 September 2017 The Alan Turing Institute
Algorithm document for SCIAMACHY Stratozone limb ozone profile retrievals
 Algorithm document for SCIAMACHY Stratozone limb ozone profile retrievals Date of origin: February 6, 2006 Author: Christian von Savigny Institute of Environmental Physics University of Bremen Otto-Hahn-Allee
Algorithm document for SCIAMACHY Stratozone limb ozone profile retrievals Date of origin: February 6, 2006 Author: Christian von Savigny Institute of Environmental Physics University of Bremen Otto-Hahn-Allee
Inverse Problems in the Bayesian Framework
 Inverse Problems in the Bayesian Framework Daniela Calvetti Case Western Reserve University Cleveland, Ohio Raleigh, NC, July 2016 Bayes Formula Stochastic model: Two random variables X R n, B R m, where
Inverse Problems in the Bayesian Framework Daniela Calvetti Case Western Reserve University Cleveland, Ohio Raleigh, NC, July 2016 Bayes Formula Stochastic model: Two random variables X R n, B R m, where
Multiple Random Variables
 Multiple Random Variables This Version: July 30, 2015 Multiple Random Variables 2 Now we consider models with more than one r.v. These are called multivariate models For instance: height and weight An
Multiple Random Variables This Version: July 30, 2015 Multiple Random Variables 2 Now we consider models with more than one r.v. These are called multivariate models For instance: height and weight An
Simulation-Based Uncertainty Quantification for Estimating Atmospheric CO2 from Satellite Data
 University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part B Faculty of Engineering and Information Sciences 2017 Simulation-Based Uncertainty Quantification
University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part B Faculty of Engineering and Information Sciences 2017 Simulation-Based Uncertainty Quantification
Satellite Observations of Greenhouse Gases
 Satellite Observations of Greenhouse Gases Richard Engelen European Centre for Medium-Range Weather Forecasts Outline Introduction Data assimilation vs. retrievals 4D-Var data assimilation Observations
Satellite Observations of Greenhouse Gases Richard Engelen European Centre for Medium-Range Weather Forecasts Outline Introduction Data assimilation vs. retrievals 4D-Var data assimilation Observations
A Global Atmospheric Model. Joe Tribbia NCAR Turbulence Summer School July 2008
 A Global Atmospheric Model Joe Tribbia NCAR Turbulence Summer School July 2008 Outline Broad overview of what is in a global climate/weather model of the atmosphere Spectral dynamical core Some results-climate
A Global Atmospheric Model Joe Tribbia NCAR Turbulence Summer School July 2008 Outline Broad overview of what is in a global climate/weather model of the atmosphere Spectral dynamical core Some results-climate
Physics 403. Segev BenZvi. Parameter Estimation, Correlations, and Error Bars. Department of Physics and Astronomy University of Rochester
 Physics 403 Parameter Estimation, Correlations, and Error Bars Segev BenZvi Department of Physics and Astronomy University of Rochester Table of Contents 1 Review of Last Class Best Estimates and Reliability
Physics 403 Parameter Estimation, Correlations, and Error Bars Segev BenZvi Department of Physics and Astronomy University of Rochester Table of Contents 1 Review of Last Class Best Estimates and Reliability
Multiple Scenario Inversion of Reflection Seismic Prestack Data
 Downloaded from orbit.dtu.dk on: Nov 28, 2018 Multiple Scenario Inversion of Reflection Seismic Prestack Data Hansen, Thomas Mejer; Cordua, Knud Skou; Mosegaard, Klaus Publication date: 2013 Document Version
Downloaded from orbit.dtu.dk on: Nov 28, 2018 Multiple Scenario Inversion of Reflection Seismic Prestack Data Hansen, Thomas Mejer; Cordua, Knud Skou; Mosegaard, Klaus Publication date: 2013 Document Version
Robots Autónomos. Depto. CCIA. 2. Bayesian Estimation and sensor models. Domingo Gallardo
 Robots Autónomos 2. Bayesian Estimation and sensor models Domingo Gallardo Depto. CCIA http://www.rvg.ua.es/master/robots References Recursive State Estimation: Thrun, chapter 2 Sensor models and robot
Robots Autónomos 2. Bayesian Estimation and sensor models Domingo Gallardo Depto. CCIA http://www.rvg.ua.es/master/robots References Recursive State Estimation: Thrun, chapter 2 Sensor models and robot
GEMS. Nimbus 4, Nimbus7, NOAA-9, NOAA11, NOAA16, NOAA17
 GEMS (Geostationary Environment Monitoring Spectrometer) SBUV,BUV TOMS (50x50km 2 ) Nimbus7, METEOR-3, ADEOS, Earth-probe GOME1/2 (40x40km 2 ) ERS-2 SCIAMACHY (30x60km 2 ) OMI (13x24km2) OMPS (50x50km
GEMS (Geostationary Environment Monitoring Spectrometer) SBUV,BUV TOMS (50x50km 2 ) Nimbus7, METEOR-3, ADEOS, Earth-probe GOME1/2 (40x40km 2 ) ERS-2 SCIAMACHY (30x60km 2 ) OMI (13x24km2) OMPS (50x50km
Simultaneous Multi-frame MAP Super-Resolution Video Enhancement using Spatio-temporal Priors
 Simultaneous Multi-frame MAP Super-Resolution Video Enhancement using Spatio-temporal Priors Sean Borman and Robert L. Stevenson Department of Electrical Engineering, University of Notre Dame Notre Dame,
Simultaneous Multi-frame MAP Super-Resolution Video Enhancement using Spatio-temporal Priors Sean Borman and Robert L. Stevenson Department of Electrical Engineering, University of Notre Dame Notre Dame,
System Identification, Lecture 4
 System Identification, Lecture 4 Kristiaan Pelckmans (IT/UU, 2338) Course code: 1RT880, Report code: 61800 - Spring 2016 F, FRI Uppsala University, Information Technology 13 April 2016 SI-2016 K. Pelckmans
System Identification, Lecture 4 Kristiaan Pelckmans (IT/UU, 2338) Course code: 1RT880, Report code: 61800 - Spring 2016 F, FRI Uppsala University, Information Technology 13 April 2016 SI-2016 K. Pelckmans
Lecture 3. G. Cowan. Lecture 3 page 1. Lectures on Statistical Data Analysis
 Lecture 3 1 Probability (90 min.) Definition, Bayes theorem, probability densities and their properties, catalogue of pdfs, Monte Carlo 2 Statistical tests (90 min.) general concepts, test statistics,
Lecture 3 1 Probability (90 min.) Definition, Bayes theorem, probability densities and their properties, catalogue of pdfs, Monte Carlo 2 Statistical tests (90 min.) general concepts, test statistics,
Winter 2019 Math 106 Topics in Applied Mathematics. Lecture 1: Introduction
 Winter 2019 Math 106 Topics in Applied Mathematics Data-driven Uncertainty Quantification Yoonsang Lee (yoonsang.lee@dartmouth.edu) Lecture 1: Introduction 19 Winter M106 Class: MWF 12:50-1:55 pm @ 200
Winter 2019 Math 106 Topics in Applied Mathematics Data-driven Uncertainty Quantification Yoonsang Lee (yoonsang.lee@dartmouth.edu) Lecture 1: Introduction 19 Winter M106 Class: MWF 12:50-1:55 pm @ 200
Bayesian Approaches Data Mining Selected Technique
 Bayesian Approaches Data Mining Selected Technique Henry Xiao xiao@cs.queensu.ca School of Computing Queen s University Henry Xiao CISC 873 Data Mining p. 1/17 Probabilistic Bases Review the fundamentals
Bayesian Approaches Data Mining Selected Technique Henry Xiao xiao@cs.queensu.ca School of Computing Queen s University Henry Xiao CISC 873 Data Mining p. 1/17 Probabilistic Bases Review the fundamentals
Vector Autoregressive Model. Vector Autoregressions II. Estimation of Vector Autoregressions II. Estimation of Vector Autoregressions I.
 Vector Autoregressive Model Vector Autoregressions II Empirical Macroeconomics - Lect 2 Dr. Ana Beatriz Galvao Queen Mary University of London January 2012 A VAR(p) model of the m 1 vector of time series
Vector Autoregressive Model Vector Autoregressions II Empirical Macroeconomics - Lect 2 Dr. Ana Beatriz Galvao Queen Mary University of London January 2012 A VAR(p) model of the m 1 vector of time series
Practical Bayesian Optimization of Machine Learning. Learning Algorithms
 Practical Bayesian Optimization of Machine Learning Algorithms CS 294 University of California, Berkeley Tuesday, April 20, 2016 Motivation Machine Learning Algorithms (MLA s) have hyperparameters that
Practical Bayesian Optimization of Machine Learning Algorithms CS 294 University of California, Berkeley Tuesday, April 20, 2016 Motivation Machine Learning Algorithms (MLA s) have hyperparameters that
Aircraft Validation of Infrared Emissivity derived from Advanced InfraRed Sounder Satellite Observations
 Aircraft Validation of Infrared Emissivity derived from Advanced InfraRed Sounder Satellite Observations Robert Knuteson, Fred Best, Steve Dutcher, Ray Garcia, Chris Moeller, Szu Chia Moeller, Henry Revercomb,
Aircraft Validation of Infrared Emissivity derived from Advanced InfraRed Sounder Satellite Observations Robert Knuteson, Fred Best, Steve Dutcher, Ray Garcia, Chris Moeller, Szu Chia Moeller, Henry Revercomb,
Gaussian processes and bayesian optimization Stanisław Jastrzębski. kudkudak.github.io kudkudak
 Gaussian processes and bayesian optimization Stanisław Jastrzębski kudkudak.github.io kudkudak Plan Goal: talk about modern hyperparameter optimization algorithms Bayes reminder: equivalent linear regression
Gaussian processes and bayesian optimization Stanisław Jastrzębski kudkudak.github.io kudkudak Plan Goal: talk about modern hyperparameter optimization algorithms Bayes reminder: equivalent linear regression
University of Cambridge Engineering Part IIB Module 4F10: Statistical Pattern Processing Handout 2: Multivariate Gaussians
 Engineering Part IIB: Module F Statistical Pattern Processing University of Cambridge Engineering Part IIB Module F: Statistical Pattern Processing Handout : Multivariate Gaussians. Generative Model Decision
Engineering Part IIB: Module F Statistical Pattern Processing University of Cambridge Engineering Part IIB Module F: Statistical Pattern Processing Handout : Multivariate Gaussians. Generative Model Decision